磁聲成像(MAT)技術具有高靈敏度、高空間分辨率的優點,其聲源產生機制是正、逆問題的研究基礎。本文分別采用點源、偶極子源輻射理論對實驗條件下產生的聲信號進行了仿真,探討了它們的聲壓信號差異,并開展了物理實驗進行對照和驗證。實驗結果顯示MAT的聲波具有一定的方向性,表明偶極子聲源模型比點聲源模型更接近于實際情況。本研究對于MAT算法的精確化具有重要意義。
引用本文: 王世剛, 馬任, 張順起, 殷濤, 劉志朋. 基于聲偶極子理論的磁聲成像聲源發生機制探討. 生物醫學工程學雜志, 2014, 31(1): 91-96. doi: 10.7507/1001-5515.20140018 復制
版權信息: ?四川大學華西醫院華西期刊社《生物醫學工程學雜志》版權所有,未經授權不得轉載、改編
引言
對于以生物組織電特性為成像目標的醫學影像研究,磁聲成像(magnetoacoustic tomography,MAT)[1]技術因其具有電阻抗成像[2-3]高靈敏度和超聲成像高空間分辨率的特點,越來越受到國內外研究人員的關注。由于組織正常狀態和病變狀態的電特性不同,其電導率有較大差異[4],所以MAT技術對于病變組織的早期檢查,尤其是對未發生器質性變化病變的早期發現具有重要意義,在醫學功能成像和無損檢測領域中具有廣闊的應用前景。
目前,對于MAT的研究處于理論仿真和實驗研究階段,仍有許多問題需要深入探討。其中,MAT的聲源產生機制是研究正、逆問題的基礎和關鍵,目前的研究大多是以點聲源模型來進行聲場和電導率的求解[5-7],分析聲源的產生機制與聲場分布的關系。實驗中發現MAT的聲場具有指向性,點聲源模型對MAT問題的解釋顯現出局限性。所以,本文對MAT聲源的物理產生機制進行了理論分析,并對注入電流導線產生的聲波進行了仿真和物理實驗,探討了MAT偶極子聲源、點聲源與實際的物理模型的差異。該研究可以為MAT中的聲源問題研究提供一定的方法學基礎和參考。
1 方法
1.1 基本原理
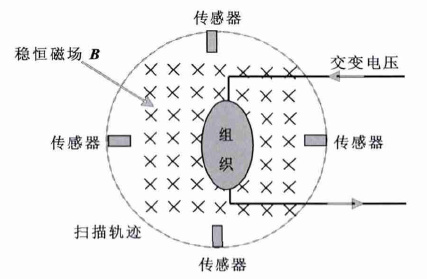
人體病變組織與正常組織以及不同組織間電導率存在著差異,MAT技術就是利用含有電導率差異信息的聲信號來重建生物組織的電導率圖像。MAT原理如圖 1所示,將被測生物組織置于穩恒磁場B中并通一交變電壓,在穩恒磁場的激勵下生物組織內帶電粒子受到洛倫茲力作用發生機械振動并產生與施加交變電壓同頻的聲波。顯然,超聲信號與電流和穩恒磁場有關,而電流與生物組織電導率及施加電壓有關。所以,通過聲傳感器接收包含生物組織電導率信息的超聲信號并進行圖像重建,就可以得到被測生物組織內電導率的分布圖像。
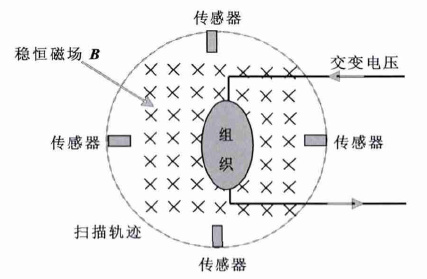 圖1
MAT原理示意圖
Figure1.
Principle diagram of MAT
圖1
MAT原理示意圖
Figure1.
Principle diagram of MAT
本研究采用注入電流式MAT實驗研究。
MAT的波動方程為式(1) ,一般正問題波動方程的解運用格林函數法[8-10],逆問題采用時間反演法[11-12]求解得到振動聲源,再根據電磁感應定律和歐姆定律得到生物組織的電導率分布。
| ${{\nabla }^{2}}p\left( r,t \right)-\frac{1}{c_{s}^{2}}\frac{{{\partial }^{2}}}{\partial {{t}^{2}}}p\left( r,t \right)=\nabla \centerdot \left\lceil J\left( r,t \right)\times B \right\rceil ,$ |
其中p(r,t)為聲壓,cs為組織內的聲速,J(r,t)為電流密度,B為穩恒磁場。
1.2 MAT聲源發生機制分析
因為不同的聲源模式具有不同的傳播方式,聲場聲壓的分布也不相同,所以聲源發生機制是MAT研究的基礎。常見聲源模型有點聲源模型和偶極聲源模型。
1.2.1 點聲源模型
點聲源是小脈動球源,脈動球源是進行著均勻漲縮振動的球面聲源,也就是在球源表面上各點沿著徑向做同振幅、同相位的振動,這是一種理想的輻射模型。脈動球源的波動方程為:
| $\frac{{{\partial }^{2}}p}{\partial {{r}^{2}}}-\frac{2}{r}\frac{\partial p}{\partial r}=\frac{1}{c_{s}^{2}}\frac{{{\partial }^{2}}p}{\partial {{t}^{2}}}$ |
引入,波動方程的解為
| $p=\frac{\left| A \right|}{r}{{e}^{j(w\text{ }t-kr+\theta )}},$ |
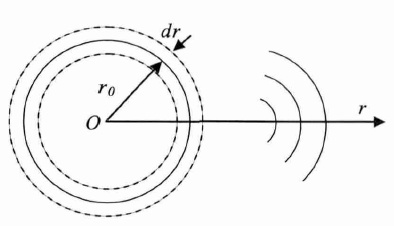
其中A為引入常數,代表聲壓振幅,ρ0為媒質靜止密度,cs為聲速,k=2π/λ為波數,r0為球源半徑,ua為振速幅值。當球源半徑比較小或聲波頻率比較低時,有,這時的脈動球源即為點源[13]。點源的典型特征為無指向性,即距聲源相同距離、不同方向處的聲壓和相位相同,聲壓與距離成反比,點聲源的輻射圖如圖 2所示。
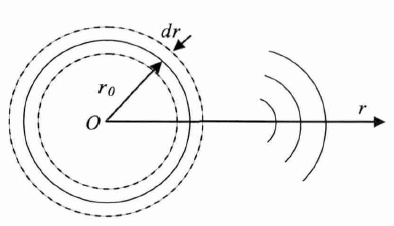 圖2
點聲源的輻射圖
Figure2.
Radial diagram of monopole source
圖2
點聲源的輻射圖
Figure2.
Radial diagram of monopole source
1.2.2 偶極子聲源模型
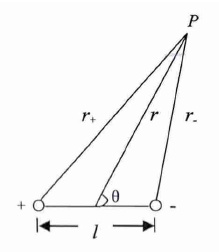
聲偶極子是由兩個相距很近,并以相同的振幅而相位相反的點源所組成的聲源。偶極子聲源模型如圖 3所示。
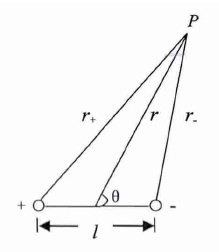 圖3
偶極子聲源模型
Figure3.
Dipole source model
圖3
偶極子聲源模型
Figure3.
Dipole source model
在磁聲成像實驗中,,并且,所以有:r+≈r+(l/2)cosθ,r-≈r-(l/2)cosθ,代入兩脈動聲源的聲壓式(4) 后得到式(5) ,即
| $p=\frac{A}{{{r}_{+}}}{{e}^{j\left( wt-k{{r}_{+}} \right)}}-\frac{A}{{{r}_{-}}}{{e}^{j\left( wt-k{{r}_{-}} \right)}},$ |
| $\begin{align} & p=\frac{A}{r}{{e}^{j\left( wt-kr \right)}}\left( {{e}^{\frac{jkl\cos \theta }{2}}}-{{e}^{\frac{jkl\cos \theta }{2}}} \right)\approx \\ & -j\frac{klA}{r}\cos \theta {{e}^{j\left( wt-kr \right)}}, \\ \end{align}$ |
式(5) 說明偶極輻射與θ有關,指向性為|cosθ|,在空間中表現為∞型輻射[13],即在同一距離,不同方向的位置上的聲壓不同。
1.2.3 MAT聲源發生機制
在MAT中,物體內部帶電粒子受到交變電流和穩恒磁場耦合洛倫茲力的作用,在洛倫茲力方向上產生方向和大小隨時間改變的機械振動,該機械振動使得組織在洛倫茲力方向上壓縮,而在相反方向上膨脹。顯然,該振動的傳播在各個方向上并不相同,根據力的分解,在洛倫茲力方向上,組織受力較大,振動較強;而在其它方向上組織受力較小,振動較弱,從而使得振動向外傳播具有方向性。因此,作為MAT聲源的振動傳播形式的聲壓也具有方向性,類似于偶極子聲源指向性,這與點源振動沿球面方傳播、無輻射指向性有著本質的不同。
1.3 方法
為比較聲偶極子聲源、點聲源與實際情況的差異性,本文對通電導線產生波形進行了仿真,并進行了注入電流式磁聲成像實驗。
1.3.1 仿真條件與方法
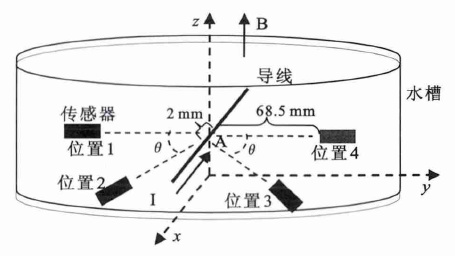
仿真示意圖如圖 4所示,一根銅導線位于xz面且平行于x軸;A點是導線中心位置,與坐標原點有一定的距離;傳感器平行于xy面,從不同的角度分別接收磁聲信號,位置1、4分別垂直于導線,位于導線的左右兩側,位置2與位置1的夾角為θ,位置3與位置4的夾角為θ,它們與A點的距離相同;銅導線通以50 A的脈沖電流,均勻穩恒磁場強度為0.4 T,方向為z,采用Matlab編程仿真該實驗。
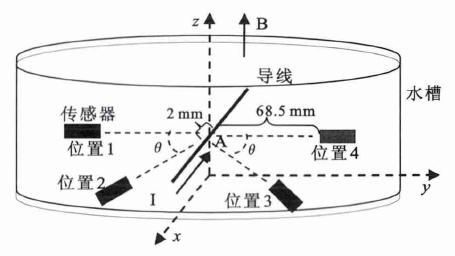 圖4
實驗模型示意圖
Figure4.
Diagram of experimental model
圖4
實驗模型示意圖
Figure4.
Diagram of experimental model
1.3.2 實驗條件與方法
實驗的示意圖也如圖 4所示,具體條件為在0.4 T的均勻穩恒磁場中,由信號發生器產生寬度為1 μs,峰峰值為1 V正弦脈沖信號,經功率放大器放大后為20 V加載到線徑為0.5 mm導線(串聯5 Ω電阻)上,傳感器放置于距離導線為68.5 mm處接收聲信號,用示波器放大500倍并平均512次顯示記錄。因為組織中的聲速與水中的聲速相近,為減少散射和反射,所以導線和傳感器均放置在水中。實驗中,傳感器的聚焦區寬度為2 mm,遠遠小于導線與傳感器的距離68.5 mm。這樣,可以認為傳感器只接收聚焦區的振動聲信號,非聚焦區的聲信號忽略不計。在該實驗條件下,不同位置處的傳感器接收的是同一振動源發出的沿不同方向的聲信號。
2 結果
2.1 仿真結果
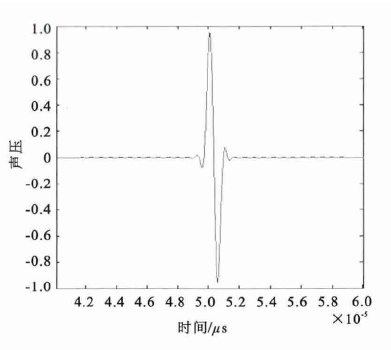
在仿真實驗規定條件下,將傳感器仿真為理想聚焦型傳感器,采用點聲源理論仿真聲壓,當傳感器處于試驗示意圖 4中的位置1~4時,仿真所接收的聲壓歸一化波形均為圖 5所示,聲壓具有相同的相位和幅值。
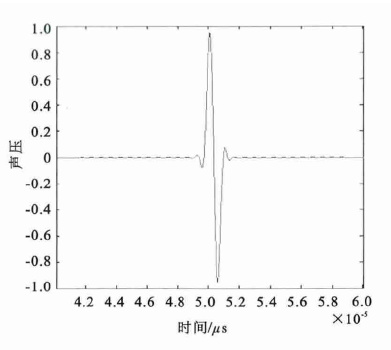 圖5
采用點聲源仿真聲壓結果
Figure5.
Acoustic pressure result of monopole source simulation
圖5
采用點聲源仿真聲壓結果
Figure5.
Acoustic pressure result of monopole source simulation
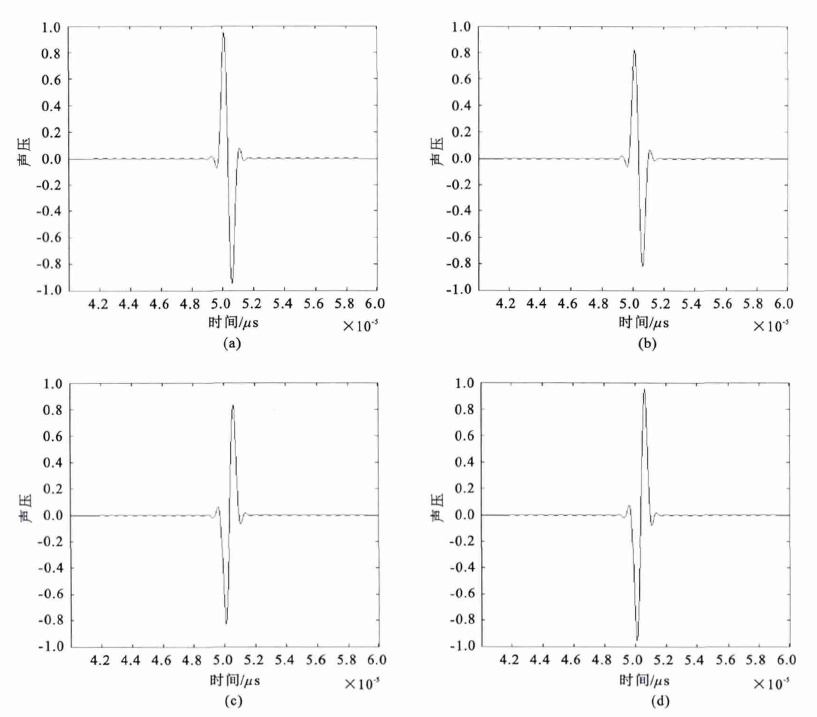
同樣將傳感器放置于上述位置,當采用偶極子聲源理論仿真聲壓時,歸一化結果如圖 6所示。圖 6(a)~(d)分別顯示傳感器位置處于圖 4中1~4時接收的聲壓信號。仿真結果表明,位置1和位置4傳感器接收的聲信號相位相反,幅值相等;位置2和位置3傳感器接收的聲信號相位相反,幅值相等且小于位置1和位置4的幅值;位置1和位置2傳感器接收的聲信號相位相同;位置3和位置4傳感器接收的聲信號相位相同。
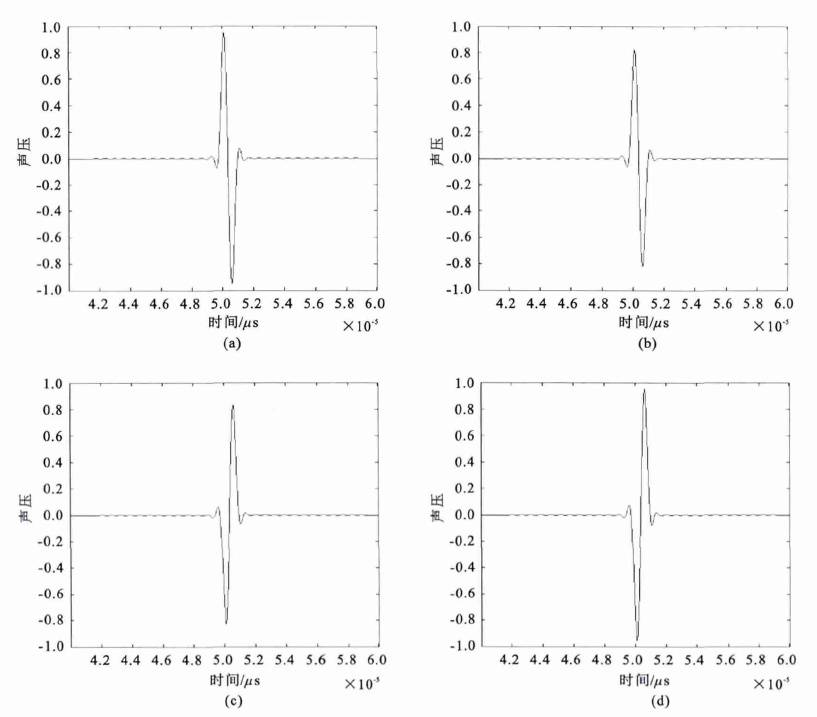 圖6
采用偶極聲源理論仿真聲壓結果
圖6
采用偶極聲源理論仿真聲壓結果
(a)傳感器置于位置1時聲壓;(b)傳感器置于位置2時聲壓;(c)傳感器置于位置3時聲壓;(d)傳感器置于位置4時聲壓
Figure6. Acoustic pressure results of dipole source simulation(a) pressure of transducer at position 1; (b) pressure of transducer at position 2; (c) pressure of transducer at position 3; (d) pressure of transducer at position 4
2.2 實驗結果
在實驗規定條件下,由示波器記錄傳感器采集的超聲信號如圖 7所示。同樣,圖 7(a)~(d)分別表示位置在1~4時傳感器接收的聲壓信號。示波器的通道CH1顯示為激勵電壓,參數為100 mV/div、10 μs/div,通道CH2為接收的信號的電壓(此時采集電路已將聲信號轉換為電信號),參數為1 mV/div、10 μs/div。從實驗結果可以看出,位置1和位置4傳感器接收的聲信號相位相反,幅值相等;位置2和位置3傳感器接收的聲信號相位相反,幅值相等且小于位置1和位置4的幅值;位置1和位置2傳感器接收的聲信號相位相同;位置3和位置4傳感器接收的聲信號相位相同。上述位置從激勵到聲壓信號的時間均為46 μs。
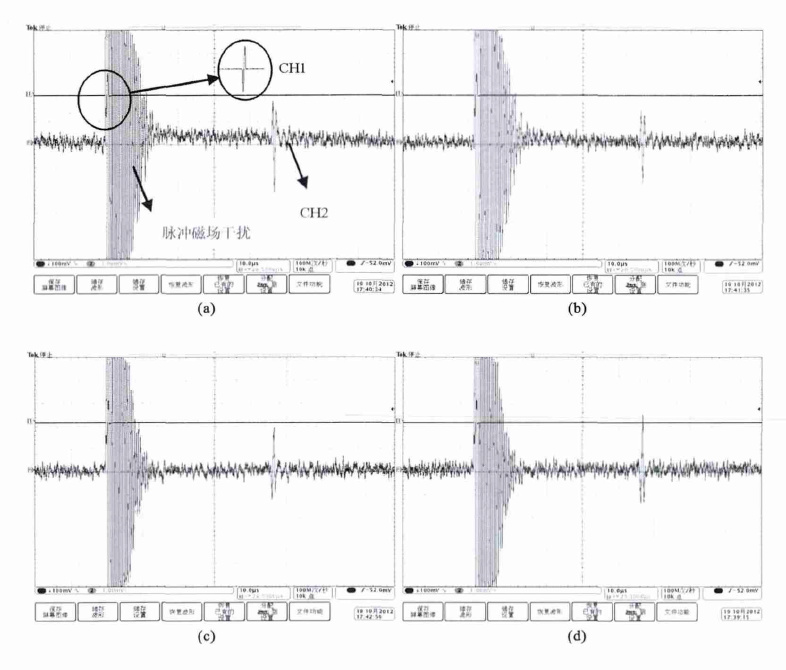 圖7
實驗結果
圖7
實驗結果
(a)傳感器置于位置1時聲壓;(b)傳感器置于位置2時聲壓;(c)傳感器置于位置3時聲壓;(d)傳感器置于位置4時聲壓
Figure7. Results of experiments(a) pressure of transducer at position 1; (b) pressure of transducer at position 2; (c) pressure of transducer at position 3; (d) pressure of transducer at position 4
3 結論
本研究對MAT的聲源產生機制進行了理論探討,并且進行了仿真和實驗研究。仿真結果表明,點聲源理論產生的聲壓不具有方向性,在不同方向采集的聲信號幅值和相位都相同,如圖 5所示;偶極子聲源理論產生的聲壓在平行于振動方向時幅值較大,傳播方向與振動方向有一定角度時聲壓信號幅值較小,在振動方向相反的兩側聲壓信號的相位也相反,如圖 6所示。實驗結果顯示,在振動方向的與振動點等距離的兩側傳感器所接收的聲壓信號相位相反,幅值相等;并且傳感器與振動源距離相同但方向不同時,所得聲壓也不同,傳感器平行于振動方向時所測聲壓較大,與振動方向有一定夾角時所測聲壓減小,如圖 7所示。本研究結果表明物理實驗所得結果與采用偶極子理論仿真結果符合程度高,并且MAT的聲源發射聲波具有一定的方向性,該結果表明偶極子聲源模型比點聲源模型更接近于實際情況。這有利于進一步理解聲源的產生機制,對于MAT后續成像算法的精確化具有實際意義。例如,目前的正問題基本是運用格林函數方法求解聲壓,格林函數法是將聲源視為點源來分析的,在今后的算法設計中可以結合實際傳感器特性參數,并考慮運用偶極子理論對格林函數法進行完善。
在后續的研究中,還有許多工作需要深入開展。由于聲源是微觀粒子振動,本實驗將傳感器視為聚焦傳感器,只接受敏感區的信號,為了更為準確的說明MAT聲源是組織中洛倫茲力引起的偶極聲源,可以將傳感器由實驗圖 4中垂直位置向靜磁場與導線確定的平面旋轉,進一步精確測量同樣距離不同方向的傳感器接收信號。其次,對電導率分布形狀較為復雜仿體或離體組織做注入電流式MAT實驗,進一步研究MAT的發生機理和聲源發生機制。實驗室目前正在開展這方面的工作。
引言
對于以生物組織電特性為成像目標的醫學影像研究,磁聲成像(magnetoacoustic tomography,MAT)[1]技術因其具有電阻抗成像[2-3]高靈敏度和超聲成像高空間分辨率的特點,越來越受到國內外研究人員的關注。由于組織正常狀態和病變狀態的電特性不同,其電導率有較大差異[4],所以MAT技術對于病變組織的早期檢查,尤其是對未發生器質性變化病變的早期發現具有重要意義,在醫學功能成像和無損檢測領域中具有廣闊的應用前景。
目前,對于MAT的研究處于理論仿真和實驗研究階段,仍有許多問題需要深入探討。其中,MAT的聲源產生機制是研究正、逆問題的基礎和關鍵,目前的研究大多是以點聲源模型來進行聲場和電導率的求解[5-7],分析聲源的產生機制與聲場分布的關系。實驗中發現MAT的聲場具有指向性,點聲源模型對MAT問題的解釋顯現出局限性。所以,本文對MAT聲源的物理產生機制進行了理論分析,并對注入電流導線產生的聲波進行了仿真和物理實驗,探討了MAT偶極子聲源、點聲源與實際的物理模型的差異。該研究可以為MAT中的聲源問題研究提供一定的方法學基礎和參考。
1 方法
1.1 基本原理
人體病變組織與正常組織以及不同組織間電導率存在著差異,MAT技術就是利用含有電導率差異信息的聲信號來重建生物組織的電導率圖像。MAT原理如圖 1所示,將被測生物組織置于穩恒磁場B中并通一交變電壓,在穩恒磁場的激勵下生物組織內帶電粒子受到洛倫茲力作用發生機械振動并產生與施加交變電壓同頻的聲波。顯然,超聲信號與電流和穩恒磁場有關,而電流與生物組織電導率及施加電壓有關。所以,通過聲傳感器接收包含生物組織電導率信息的超聲信號并進行圖像重建,就可以得到被測生物組織內電導率的分布圖像。
圖1
MAT原理示意圖
Figure1.
Principle diagram of MAT
本研究采用注入電流式MAT實驗研究。
MAT的波動方程為式(1) ,一般正問題波動方程的解運用格林函數法[8-10],逆問題采用時間反演法[11-12]求解得到振動聲源,再根據電磁感應定律和歐姆定律得到生物組織的電導率分布。
| ${{\nabla }^{2}}p\left( r,t \right)-\frac{1}{c_{s}^{2}}\frac{{{\partial }^{2}}}{\partial {{t}^{2}}}p\left( r,t \right)=\nabla \centerdot \left\lceil J\left( r,t \right)\times B \right\rceil ,$ |
其中p(r,t)為聲壓,cs為組織內的聲速,J(r,t)為電流密度,B為穩恒磁場。
1.2 MAT聲源發生機制分析
因為不同的聲源模式具有不同的傳播方式,聲場聲壓的分布也不相同,所以聲源發生機制是MAT研究的基礎。常見聲源模型有點聲源模型和偶極聲源模型。
1.2.1 點聲源模型
點聲源是小脈動球源,脈動球源是進行著均勻漲縮振動的球面聲源,也就是在球源表面上各點沿著徑向做同振幅、同相位的振動,這是一種理想的輻射模型。脈動球源的波動方程為:
| $\frac{{{\partial }^{2}}p}{\partial {{r}^{2}}}-\frac{2}{r}\frac{\partial p}{\partial r}=\frac{1}{c_{s}^{2}}\frac{{{\partial }^{2}}p}{\partial {{t}^{2}}}$ |
引入,波動方程的解為
| $p=\frac{\left| A \right|}{r}{{e}^{j(w\text{ }t-kr+\theta )}},$ |
其中A為引入常數,代表聲壓振幅,ρ0為媒質靜止密度,cs為聲速,k=2π/λ為波數,r0為球源半徑,ua為振速幅值。當球源半徑比較小或聲波頻率比較低時,有,這時的脈動球源即為點源[13]。點源的典型特征為無指向性,即距聲源相同距離、不同方向處的聲壓和相位相同,聲壓與距離成反比,點聲源的輻射圖如圖 2所示。
圖2
點聲源的輻射圖
Figure2.
Radial diagram of monopole source
1.2.2 偶極子聲源模型
聲偶極子是由兩個相距很近,并以相同的振幅而相位相反的點源所組成的聲源。偶極子聲源模型如圖 3所示。
圖3
偶極子聲源模型
Figure3.
Dipole source model
在磁聲成像實驗中,,并且,所以有:r+≈r+(l/2)cosθ,r-≈r-(l/2)cosθ,代入兩脈動聲源的聲壓式(4) 后得到式(5) ,即
| $p=\frac{A}{{{r}_{+}}}{{e}^{j\left( wt-k{{r}_{+}} \right)}}-\frac{A}{{{r}_{-}}}{{e}^{j\left( wt-k{{r}_{-}} \right)}},$ |
| $\begin{align} & p=\frac{A}{r}{{e}^{j\left( wt-kr \right)}}\left( {{e}^{\frac{jkl\cos \theta }{2}}}-{{e}^{\frac{jkl\cos \theta }{2}}} \right)\approx \\ & -j\frac{klA}{r}\cos \theta {{e}^{j\left( wt-kr \right)}}, \\ \end{align}$ |
式(5) 說明偶極輻射與θ有關,指向性為|cosθ|,在空間中表現為∞型輻射[13],即在同一距離,不同方向的位置上的聲壓不同。
1.2.3 MAT聲源發生機制
在MAT中,物體內部帶電粒子受到交變電流和穩恒磁場耦合洛倫茲力的作用,在洛倫茲力方向上產生方向和大小隨時間改變的機械振動,該機械振動使得組織在洛倫茲力方向上壓縮,而在相反方向上膨脹。顯然,該振動的傳播在各個方向上并不相同,根據力的分解,在洛倫茲力方向上,組織受力較大,振動較強;而在其它方向上組織受力較小,振動較弱,從而使得振動向外傳播具有方向性。因此,作為MAT聲源的振動傳播形式的聲壓也具有方向性,類似于偶極子聲源指向性,這與點源振動沿球面方傳播、無輻射指向性有著本質的不同。
1.3 方法
為比較聲偶極子聲源、點聲源與實際情況的差異性,本文對通電導線產生波形進行了仿真,并進行了注入電流式磁聲成像實驗。
1.3.1 仿真條件與方法
仿真示意圖如圖 4所示,一根銅導線位于xz面且平行于x軸;A點是導線中心位置,與坐標原點有一定的距離;傳感器平行于xy面,從不同的角度分別接收磁聲信號,位置1、4分別垂直于導線,位于導線的左右兩側,位置2與位置1的夾角為θ,位置3與位置4的夾角為θ,它們與A點的距離相同;銅導線通以50 A的脈沖電流,均勻穩恒磁場強度為0.4 T,方向為z,采用Matlab編程仿真該實驗。
圖4
實驗模型示意圖
Figure4.
Diagram of experimental model
1.3.2 實驗條件與方法
實驗的示意圖也如圖 4所示,具體條件為在0.4 T的均勻穩恒磁場中,由信號發生器產生寬度為1 μs,峰峰值為1 V正弦脈沖信號,經功率放大器放大后為20 V加載到線徑為0.5 mm導線(串聯5 Ω電阻)上,傳感器放置于距離導線為68.5 mm處接收聲信號,用示波器放大500倍并平均512次顯示記錄。因為組織中的聲速與水中的聲速相近,為減少散射和反射,所以導線和傳感器均放置在水中。實驗中,傳感器的聚焦區寬度為2 mm,遠遠小于導線與傳感器的距離68.5 mm。這樣,可以認為傳感器只接收聚焦區的振動聲信號,非聚焦區的聲信號忽略不計。在該實驗條件下,不同位置處的傳感器接收的是同一振動源發出的沿不同方向的聲信號。
2 結果
2.1 仿真結果
在仿真實驗規定條件下,將傳感器仿真為理想聚焦型傳感器,采用點聲源理論仿真聲壓,當傳感器處于試驗示意圖 4中的位置1~4時,仿真所接收的聲壓歸一化波形均為圖 5所示,聲壓具有相同的相位和幅值。
圖5
采用點聲源仿真聲壓結果
Figure5.
Acoustic pressure result of monopole source simulation
同樣將傳感器放置于上述位置,當采用偶極子聲源理論仿真聲壓時,歸一化結果如圖 6所示。圖 6(a)~(d)分別顯示傳感器位置處于圖 4中1~4時接收的聲壓信號。仿真結果表明,位置1和位置4傳感器接收的聲信號相位相反,幅值相等;位置2和位置3傳感器接收的聲信號相位相反,幅值相等且小于位置1和位置4的幅值;位置1和位置2傳感器接收的聲信號相位相同;位置3和位置4傳感器接收的聲信號相位相同。
圖6
采用偶極聲源理論仿真聲壓結果
(a)傳感器置于位置1時聲壓;(b)傳感器置于位置2時聲壓;(c)傳感器置于位置3時聲壓;(d)傳感器置于位置4時聲壓
Figure6. Acoustic pressure results of dipole source simulation(a) pressure of transducer at position 1; (b) pressure of transducer at position 2; (c) pressure of transducer at position 3; (d) pressure of transducer at position 4
2.2 實驗結果
在實驗規定條件下,由示波器記錄傳感器采集的超聲信號如圖 7所示。同樣,圖 7(a)~(d)分別表示位置在1~4時傳感器接收的聲壓信號。示波器的通道CH1顯示為激勵電壓,參數為100 mV/div、10 μs/div,通道CH2為接收的信號的電壓(此時采集電路已將聲信號轉換為電信號),參數為1 mV/div、10 μs/div。從實驗結果可以看出,位置1和位置4傳感器接收的聲信號相位相反,幅值相等;位置2和位置3傳感器接收的聲信號相位相反,幅值相等且小于位置1和位置4的幅值;位置1和位置2傳感器接收的聲信號相位相同;位置3和位置4傳感器接收的聲信號相位相同。上述位置從激勵到聲壓信號的時間均為46 μs。
圖7
實驗結果
(a)傳感器置于位置1時聲壓;(b)傳感器置于位置2時聲壓;(c)傳感器置于位置3時聲壓;(d)傳感器置于位置4時聲壓
Figure7. Results of experiments(a) pressure of transducer at position 1; (b) pressure of transducer at position 2; (c) pressure of transducer at position 3; (d) pressure of transducer at position 4
3 結論
本研究對MAT的聲源產生機制進行了理論探討,并且進行了仿真和實驗研究。仿真結果表明,點聲源理論產生的聲壓不具有方向性,在不同方向采集的聲信號幅值和相位都相同,如圖 5所示;偶極子聲源理論產生的聲壓在平行于振動方向時幅值較大,傳播方向與振動方向有一定角度時聲壓信號幅值較小,在振動方向相反的兩側聲壓信號的相位也相反,如圖 6所示。實驗結果顯示,在振動方向的與振動點等距離的兩側傳感器所接收的聲壓信號相位相反,幅值相等;并且傳感器與振動源距離相同但方向不同時,所得聲壓也不同,傳感器平行于振動方向時所測聲壓較大,與振動方向有一定夾角時所測聲壓減小,如圖 7所示。本研究結果表明物理實驗所得結果與采用偶極子理論仿真結果符合程度高,并且MAT的聲源發射聲波具有一定的方向性,該結果表明偶極子聲源模型比點聲源模型更接近于實際情況。這有利于進一步理解聲源的產生機制,對于MAT后續成像算法的精確化具有實際意義。例如,目前的正問題基本是運用格林函數方法求解聲壓,格林函數法是將聲源視為點源來分析的,在今后的算法設計中可以結合實際傳感器特性參數,并考慮運用偶極子理論對格林函數法進行完善。
在后續的研究中,還有許多工作需要深入開展。由于聲源是微觀粒子振動,本實驗將傳感器視為聚焦傳感器,只接受敏感區的信號,為了更為準確的說明MAT聲源是組織中洛倫茲力引起的偶極聲源,可以將傳感器由實驗圖 4中垂直位置向靜磁場與導線確定的平面旋轉,進一步精確測量同樣距離不同方向的傳感器接收信號。其次,對電導率分布形狀較為復雜仿體或離體組織做注入電流式MAT實驗,進一步研究MAT的發生機理和聲源發生機制。實驗室目前正在開展這方面的工作。