為了提高心臟起博器非接觸供電技術的可靠性, 本文提出了一種新穎的應用無線反饋穩壓技術調節心臟病患者內置供電濾波電路輸出電壓、電流的控制方法, 使其輸出電壓保持穩定, 從而確保超級電容和心臟起搏器得到穩定的供電電源。要實時地實施精確的電壓控制, 考慮原、副邊線圈電感耦合系數變化、外置供電電源電壓和負載的變化, 需要實時、準確檢測整流濾波后的輸出電壓、電流值。因此, 在基于混沌控制理論的基礎上, 本文采用快速觀測整流濾波后的電壓和電流的雙渦卷相圖算法, 可有效提高電路的檢測時間。所提出的控制方法其相圖可分解成8段, 得到7個零極值點, 當檢測到這些零極值點時, 根據零極值點的瞬時值得到對應的電壓、電流平均值。仿真與實驗結果表明, 采用上述控制方法, 可使開關器件的響應時間縮短為不超過1/2開關周期, 從而驗證了所提出檢測算法的可行性與有效性。
引用本文: 周成虎, 黃明明, 李松濤. 心臟起搏器非接觸供電的混沌控制研究. 生物醫學工程學雜志, 2015, 32(6): 1335-1342. doi: 10.7507/1001-5515.20150236 復制
版權信息: ?四川大學華西醫院華西期刊社《生物醫學工程學雜志》版權所有,未經授權不得轉載、改編
0 引言
目前,心臟起博器常用一次性電池供電,到期需要將電池及起博器一并更換。因此,該供電方式需要對患者多次手術,給患者帶來極大痛苦并增加了整個醫療費用。為解決上述問題,近年來國內外一些專家學者提出了用非接觸充電裝置代替一次性電池,可為起搏器提供持續的電能供給,避免由于起搏器電池電量耗盡而造成的意外事故[1]。
傳統的心臟起搏器非接觸充電系統已具備起搏器供電方案[2-4],但對于這些裝置的穩壓原理探討尚不充分,沒有給出明確的穩壓范圍和能夠滿足充電管理電路(給超級電容器、起搏器提供充電管理的單元電路)的輸入電壓范圍的穩壓策略。此外尚需考慮人體能承受的溫升為2℃,減少內置電路的發熱因而具有重要的現實意義。并且要使非接觸供電裝置在心臟起搏器中得到廣泛應用,其使用年限至少需要達到一次性電池壽命的2~3倍以上。因此,如何保證該類供電裝置的使用年限、輸出電壓、電流的穩定性以及減少內置電路的發熱,是該類供電裝置實用化、市場化的關鍵。
起搏器非接觸供電系統的內置部分包含一個感應線圈(即副邊線圈),用于接收體外電能發送裝置發射的電能。副邊線圈的感應電壓為交流電,需通過整流和濾波電路轉變為直流電;對該直流電采用閉環反饋方法,由外置的穩壓調節電路穩壓;最后經充電管理電路輸出給超級電容及起搏器供電。上述方法可以省去內置部分的穩壓電路,省去該電路可顯著減少內置電路發熱,而且能提高內置電路的供電可靠性。
起搏器電源的內外模塊之間采用無線反饋控制方法[5]。由于供電裝置外置部分與內置部分的相對位置可能會發生變化,從而導致原、副邊線圈的耦合系數也隨之變化。因此,提高無線反饋的實時性是整個供電系統能夠可靠工作的關鍵。在常規的非接觸供電系統設計中,為提高信號抗干擾性能,其內置模塊的輸出電流、電壓檢測量常需要進行軟硬件濾波,尤其是數字濾波算法,往往需要提供幾個開關周期甚至十幾個開關周期的離散值,然后經過復雜的數值計算處理,再控制原邊開關器件的脈沖寬度調制(Pulse Width Modulation,PWM)信號的占空比,從而控制內置電源模塊輸出電壓、電流的幅值。上述方法實時性較差,無法滿足心臟起搏器非接觸供電的實時電壓調節要求。
針對上述用于心臟起搏器的非接觸供電電源所存在的問題,為了快速檢測心臟起搏器內置電源模塊輸出的電壓、電流值,本文提出一種基于混沌控制原理的雙渦卷相圖算法,以便快速跟蹤并反饋控制外置電源的輸出功率。仿真與實驗結果表明,采用所提出的控制方法,可使開關器件的響應時間縮短為不超過1/2開關周期,可有效提高信號的檢測時間,驗證了所提出檢測算法的可行性與有效性。
1 硬件系統分析
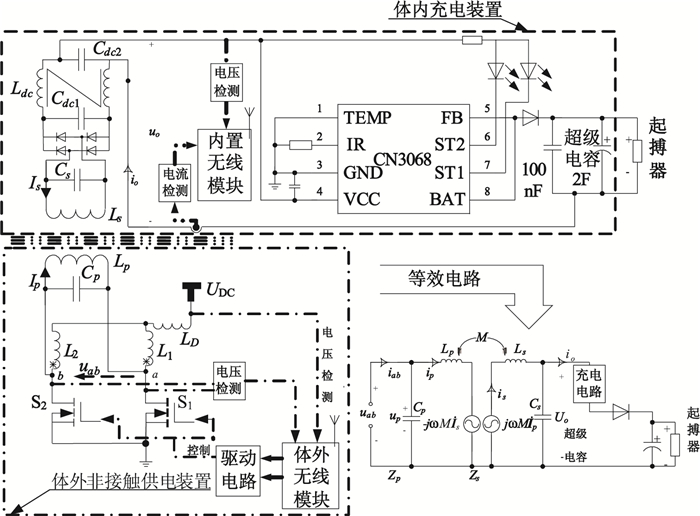
硬件系統包括體外非接觸供電裝置和體內充電裝置兩部分。體外非接觸供電裝置由非接觸供電電路、信號、驅動電路、電壓檢測電路和CC2530體外無線模塊組成,該裝置安裝在患者休息的床板下。體內充電裝置包括CC2530無線模塊、整流濾波電路、電壓與電流檢測電路、充電管理芯片CN3068、超級電容器及附屬電路。內置無線模塊和體外無線模塊采用點對點方式通信,體外無線模塊控制體外非接觸供電電路。非接觸充電電路原理如圖 1所示。
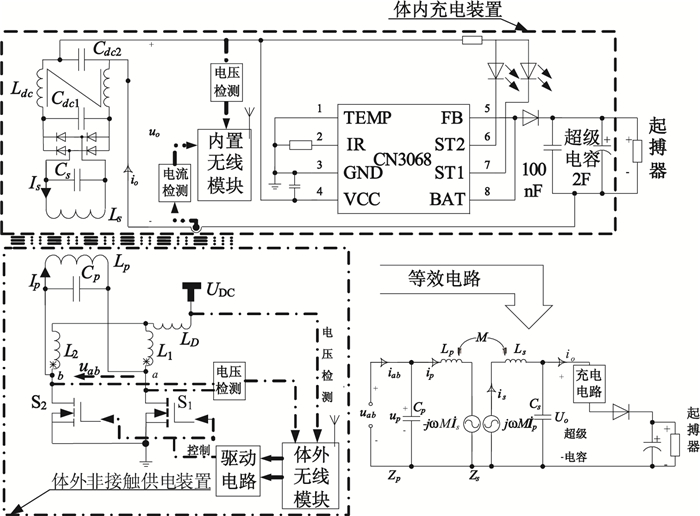 圖1
基于混沌檢測的非接觸充電電路原理圖
Figure1.
Chaos charging contact-less detection circuit schematic-based
圖1
基于混沌檢測的非接觸充電電路原理圖
Figure1.
Chaos charging contact-less detection circuit schematic-based
當患者上床休息且內置電池欠壓,體外無線模塊即命令體外供電裝置供電,體外無線模塊I/O引腳輸出控制信號,該信號經過驅動電路作電平轉換后控制開關管S1、S2交替導通和斷開。分裂電感L1、L2和開關管S1、S2構成推挽變換電路[6-8],開關管采用金屬-氧化物半導體場效應晶體管(Metal Oxide Semiconductor Field Effect Transistor,MOSFET)器件IRF540。
原、副邊線圈(Lp、Ls)組成非接觸變壓器。副邊線圈Ls安裝在起搏器內邊緣。Ls獲得的感應電壓濾波后穩定的5 V直流,經充電管理芯片CN3068向內置電池充電。無線反饋控制方法的基本原理是:體內充電裝置內的傳感器檢測到體內整流、濾波電路的電壓uo與電流值io之后,通過內置無線模塊發送至體外無線接收模塊,體外無線模塊的內核運行雙渦卷相圖算法后得到控制方案,再應用體外無線接收模塊自帶的增強型單片機內核實時調節體外供電裝置的開關器件的占空比,就可以穩定整流、濾波電路的輸出電壓uo。用該輸出電壓uo給充電芯片供電,可以省去內置部分的穩壓電路。
2 依據相圖觀測的原理分析
在忽略原邊線圈Lp和副邊線圈Ls內阻的條件下,非接觸供電系統的穩態等效電路如圖 1右下角所示。其中,充電電路及起搏器等效為負載Ro,近似為一個正的動態電阻,Ro兩端的電流為io、電壓為uo。
| $\left\{ \begin{gathered} \frac{{{\text{d}}{u_p}}}{{{\text{d}}t}}=\frac{1}{{{C_p}}}\left({{i_{ab}}-{i_p}} \right) \hfill \\ \frac{{{\text{d}}{i_p}}}{{{\text{d}}t}}=\frac{1}{{{M^2}-{L_p}{L_s}}}\left({-{L_s}{u_p} + M{u_o}} \right) \hfill \\ \frac{{{\text{d}}{i_s}}}{{{\text{d}}t}}=\frac{1}{{{M^2}-{L_p}{L_s}}}\left({-M{u_p} + {L_p}{u_o}} \right) \hfill \\ \frac{{{\text{d}}{u_o}}}{{{\text{d}}t}}=\frac{1}{{{C_s}}}\left({{i_s}-\frac{{{u_o}}}{{{R_o}}}} \right) \hfill \\ \end{gathered} \right.$ |
令v=[up ip is uo]T為狀態向量,u=[iab]為輸入向量,B=[1/Cp 0 0 0]T。則系統模型為:
| $\dot v=Av + Bu$ |
設電路參數如下:Cp=1 200 nF,Cs=10 nF,=0.15 ≈5.26μH (M是可變的[14-15],此處為:設k=0.15時得到的M值),Lp=11μH,Ls=112μH,Ro=50Ω,將式(1)作無量綱處理,令a=1/Cp,b=1/(M2-LpLs),c=1/Ls,d=M,e=1/Lp,h=1/Cs,g=1/Ro,x=up,y=ip,z=is,w=uo,f(x)=iab,得到無量綱狀態方程:
| $\left\{ \begin{gathered} \frac{{{\text{d}}x}}{{{\text{d}}t}}=a\left[{f\left(x \right)-y} \right] \hfill \\ \frac{{{\text{d}}y}}{{{\text{d}}t}}=b\left({-cx + dw} \right) \hfill \\ \frac{{{\text{d}}z}}{{{\text{d}}t}}=b\left({-dx + ew} \right) \hfill \\ \frac{{{\text{d}}w}}{{{\text{d}}t}}=h\left({z-gw} \right) \hfill \\ \end{gathered} \right.$ |
2.1 推挽式變換器電路等效特性分析
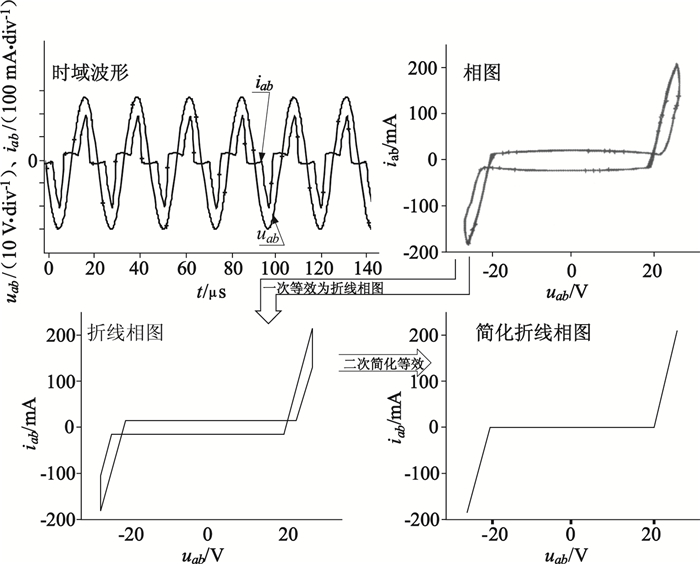
將推挽式變換器電路等效為一個非線性等效電阻N1,電壓uab和電流iab的參考方向為非關聯參考方向,該電阻具有電源特性,故等效為負電阻。等效電阻N1的特性如圖 2所示。
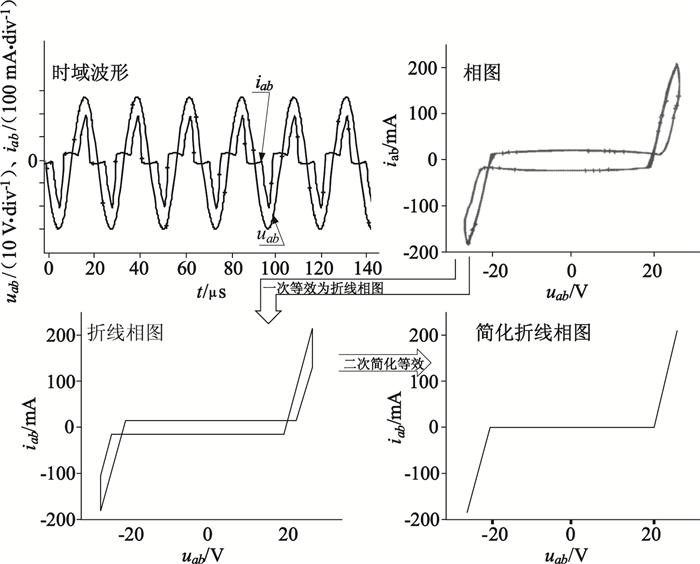 圖2
電壓uab和電流iab的對照圖
Figure2.
Voltage uab and current iab comparison chart
圖2
電壓uab和電流iab的對照圖
Figure2.
Voltage uab and current iab comparison chart
uab與iab的相圖可等效為折線相圖,這種等效較為準確。為了簡化分析,進一步等效為折線負電阻,則三分段函數f(x)等效為:
| $\begin{gathered} f\left(x \right)={m_1}x + 0.5\left({{m_0}-{m_1}} \right)\left[{\left| {x + 20} \right|-\left| {x-20} \right|} \right]=\hfill \\ \left\{ \begin{gathered} {m_1}\left({x + 20} \right)\; \;x{\text{ & }}-20\;\; \;\; \;\; {D_{-1}}=\left\{ {x, y, z|x{\text{ #38; }}-20} \right\} \hfill \\ 0\;\; \;\; \;\; \;\; \;\; \;\; \;\; \;20{\text{ > }}x{\text{ > }}-20\;{D_0}=\left\{ {x, y, z|20{\text{ > }}x{\text{ > }}-20} \right\} \hfill \\ {m_1}\left({x-20} \right)\; \;x{\text{ > }}20\;\; \;\; \;\; \;\; \;{D_1}=\left\{ {x, y, z|x{\text{ > }}20} \right\} \hfill \\ \end{gathered} \right. \hfill \\ \end{gathered} $ |
式中,m1=4,m0=0。其中f(x)將相圖空間劃分成三段線性區域D1、D0、D-1。
則平衡點處的方程為:
| $\left\{ \begin{gathered} 0=a\left[{f\left(x \right)-y} \right] \hfill \\ 0=b\left({-cx + dw} \right) \hfill \\ 0=b\left({-dx + ew} \right) \hfill \\ 0=h\left({z-gw} \right) \hfill \\ \end{gathered} \right.$ |
則求解三分段函數的線性化狀態方程、平衡點、雅克比矩陣、特征值、特征向量、特征空間直線與特征平面的數值計算詳見文獻[16]。
2.2 算法分析
開關器件的頻率為fs=68 kHz,副邊線圈Ls獲得的感應電壓為該頻率交流電經整流與濾波電路得到的電壓uo、電流io均有68 kHz紋波,濾波電路的濾波電容和電感Ldc、Cdc1、Cdc2不能無限選取。合理選擇濾波器件的濾波容量,使紋波控制在一定范圍內,這樣既能保證電路性能可靠,又能使電路體積滿足需要,該濾波電路經過適當選型,使電路的靜態紋波控制在±6‰以內。該紋波由直流信號和疊加開關器件的基頻微變信號組成。準確捕捉電流信號、電壓信號中基頻微變信號所處的相位,即可精確地判斷該信號的平均值。其相位的準確信息通過觀測這兩個信號與參照信號的混沌相圖方法得到,取電壓uab的采樣信號作為參照信號。
非接觸副邊線圈Ls安裝在起搏器內邊緣,患者身體移動、翻身均會影響磁場耦合關系。由于非接觸電路磁場耦合關系和負載雙重變化,實時獲取輸出電壓、電流的變化以便快速跟蹤并反饋控制極為重要,應用常規的濾波算法反饋控制非接觸電路,實時性較差,出現磁場耦合晃動等劇烈變化時,紋波率最大可超過±20%,不滿足非接觸供電的實時調節要求,嚴重時會導致后級充電管理芯片擊穿。
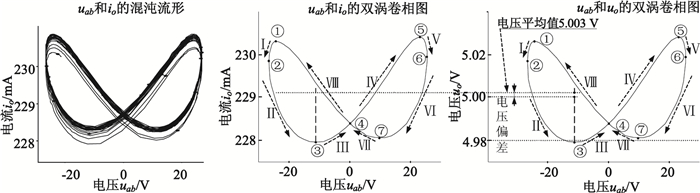
混沌檢測方案采用檢測電壓uab和電流io雙渦卷對照圖的方法,依據相圖的流形相對位置判斷包含68 kHz紋波的電流io與電壓uo平均值的變化情況。
電壓uab和電流io的雙渦卷對照圖如圖 3所示。左圖示出當電壓uab的平均值不變時,該電壓與電流io的相圖為渦卷式上升或下降流形。圖 3的中圖和右圖將電壓uab和電流io的雙渦卷相圖分解為Ⅰ~Ⅷ階段,各階段的起始點為①~⑦點。這7個點是零值點或極值點:①點、⑤點為電流io的極大值點,③點、⑦點為電流io的極小值點,⑥點、②點為電壓uab的極大值點和極小值點,④為電壓uab的零值點。電壓uab和電流io的雙渦卷特性分析如表 1所示。
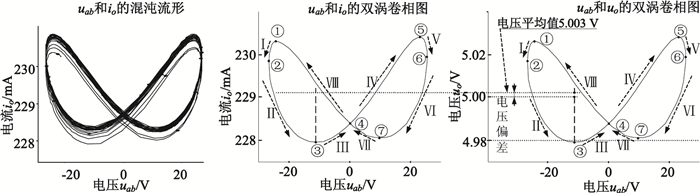 圖3
雙渦卷對照圖
Figure3.
Double scroll control map
圖3
雙渦卷對照圖
Figure3.
Double scroll control map
路徑Ⅰ~Ⅷ中電壓uab和電流io在雙渦卷相圖中具有不同的特征,只要找出任意兩個時間點的檢測信號,判斷電壓uab和電流io分別處于上升還是下降狀態,再判斷電壓uab的瞬時極性,即可判斷這兩個時間點所處的路徑。找到所處的路徑后再判斷是否越過零極值點①~⑦,當電壓uab、輸出電壓uo或輸出電流io出現實質性的變化,即出現過零或由上升轉入下降或由下降轉入上升的情況,意味著雙渦卷相圖運行在越過零極值點并切換路徑的時刻。雙渦卷相圖算法的核心思想是用電壓uab作參考得到相圖和相圖中的路徑,找到路徑切換的零極值點,用這些特定點實時判斷輸出電壓uo和輸出電流io的平均值的大小。
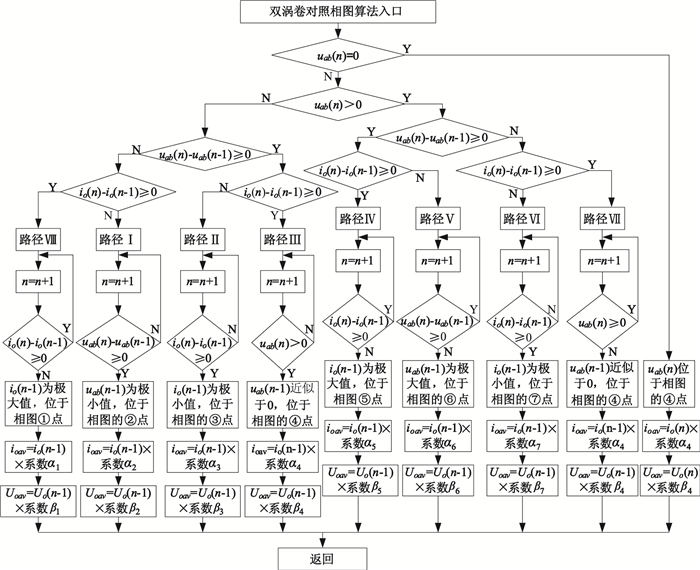
雙渦卷相圖算法的流程圖如圖 4所示。
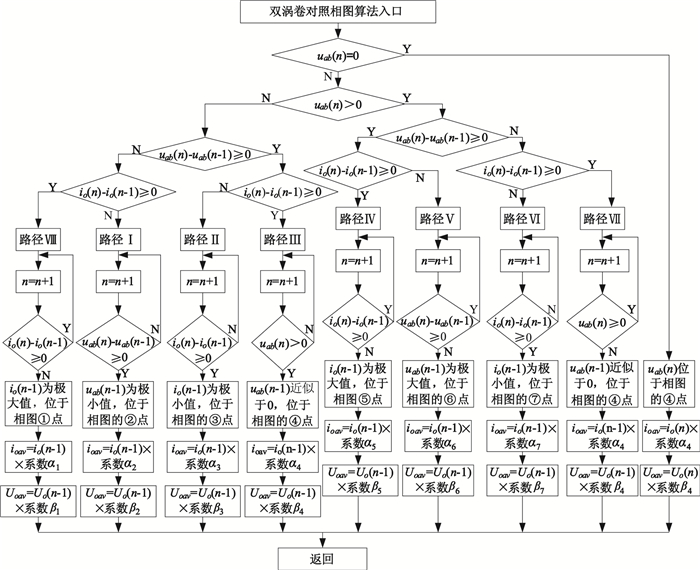 圖4
雙渦卷相圖算法流程圖
Figure4.
Double scroll phase diagram algorithm flow chart
圖4
雙渦卷相圖算法流程圖
Figure4.
Double scroll phase diagram algorithm flow chart
相圖分析算法的具體過程為:首先判斷電壓uab的瞬時極性是否等于零或大于零,然后判斷電壓uab是處于上升狀態[uab(n)-uab(n-1)≥0],還是下降狀態[uab(n)-uab(n-1)<0];再判斷電流io(n)是處于上升狀態[io(n)-io(n-1)≥0],還是下降狀態[io(n)-io(n-1)<0]。共分為9種情況:
(1)當電壓采樣值uab(n)=0時,原邊線圈電壓uab與副邊輸出電流io、電壓uo的對應關系位于如圖 3所示的相圖點④。該點對應的輸出電流io的值是228.4 mA,其修正系數α4=(229.1/228.4)≈1.003 1;同時,該點對應的輸出電壓uo為4.988 V,其對應的修正系數β4=(5.003/4.988)≈1.003。取得點④的瞬時值后,依據修正系數可計算出輸出電流平均值ioav=io(n-1)×α4=229.1 mA,輸出電壓平均值uoav=uo(n-1)×β4=5.003 V。
輸出電壓uo和輸出電流io的質量取決于整流濾波電路的性能好壞,當電路中各元件參數確定后,修正系數α4和β4的值在一個開關周期內基本保持不變,因此可用作下一個雙渦卷相圖對應點④的修正系數。
(2)當電壓uab>0,且電壓uab處于下降狀態uab(n)-uab(n-1)<0,電流io(n)處于上升狀態io(n)-io(n-1)≥0時,此時的雙渦卷相圖位于路徑Ⅶ的狀態,令n=n+1,直到新的uab(n)<0[即uab(n-1)≥0不成立],則前一個采樣值uab(n-1)最接近于圖 3雙渦卷相圖的點④。輸出電流io的修正系數α4和輸出電壓uo的修正系數β4計算方法同上。
(3)當電壓uab>0,且電壓uab處于下降狀態uab(n)-uab(n-1)<0,電流io(n)處于下降狀態io(n)-io(n-1)<0時,此時的雙渦卷相圖位于路徑Ⅵ的狀態,令n=n+1,直到io(n)-io(n-1)>0,則前一個采樣值uab(n-1)最接近于圖 3的雙渦卷相圖的⑦點。⑦點的輸出電流io的修正系數α7=(229.1/228.05)≈1.004 6。此時對應的圖 3雙渦卷相圖的電壓uo為4.981 V,電壓平均值uoav為5.003 V,可見,⑦點輸出電壓uo的修正系數β7=(5.003/4.981)≈1.004 4。平均值ioav=io(n-1)×系數α7,平均值uoav=uo(n-1)×系數β7。
(4)當電壓uab>0,且電壓uab處于上升狀態uab(n)-uab(n-1)≥0,電流io(n)處于下降狀態io(n)-io(n-1)<0時,此時的雙渦卷相圖位于路徑Ⅴ的狀態,令n=n+1,直到uab(n)-uab(n-1)<0,則前一個采樣值uab(n-1)最接近于圖 3雙渦卷相圖的⑥點。輸出電流io的修正系數α6和輸出電壓uo的修正系數β6計算方法同上。
(5)當電壓uab>0,且電壓uab處于上升狀態uab(n)-uab(n-1)≥0,電流io(n)處于上升狀態io(n)-io(n-1)≥0時,此時的雙渦卷相圖位于路徑Ⅳ的狀態,令n=n+1,直到io(n)-io(n-1)<0,則前一個采樣值uab(n-1)最接近于圖 3雙渦卷相圖的點⑤。輸出電流io的修正系數α5和輸出電壓uo的修正系數β5計算方法同上。
(6)當電壓uab<0,且電壓uab處于上升狀態uab(n)-uab(n-1)≥0,電流io(n)處于上升狀態io(n)-io(n-1)≥0時,此時的雙渦卷相圖位于路徑Ⅲ的狀態,令n=n+1,直到uab(n)>0成立,則前一個采樣值uab(n-1)最接近于圖 3雙渦卷相圖的④點。輸出電流io的修正系數α4和輸出電壓uo的修正系數β4計算方法同上。
(7)當電壓uab<0,且電壓uab處于上升狀態uab(n)-uab(n-1)≥0,且電流io(n)處于下降狀態io(n)-io(n-1)<0時,此時的雙渦卷相圖位于路徑Ⅱ的狀態,令n=n+1,直到io(n)-io(n-1)≥0成立,則前一個采樣值uab(n-1)最接近于圖 3雙渦卷相圖的③點。輸出電流io的修正系數α3和輸出電壓uo的修正系數β3計算方法同上。
(8)當電壓uab<0,且電壓uab處于下降狀態uab(n)-uab(n-1)<0,電流io(n)處于下降狀態io(n)-io(n-1)<0時,此時的雙渦卷相圖位于路徑Ⅰ的狀態,令n=n+1,直到uab(n)-uab(n-1)≥0成立,則前一個采樣值uab(n-1)最接近于圖 3雙渦卷相圖的②點。輸出電流io的修正系數α2和輸出電壓uo的修正系數β2計算方法同上。
(9)當電壓uab<0,且電壓uab處于下降狀態uab(n)-uab(n-1)<0,電流io(n)處于上升狀態io(n)-io(n-1)≥0時,此時的雙渦卷相圖位于路徑Ⅷ的狀態,令n=n+1,直到io(n)-io(n-1)<0成立,則前一個采樣值uab(n-1)最接近于圖 3雙渦卷相圖的①點。輸出電流io的修正系數α1和輸出電壓uo的修正系數β1計算方法同上。
設已獲得圖 3中③點的電流io值為228 mA,則此時對應的瞬時電壓uo為4.98 V,已知上一個雙渦卷相圖③點的修正系數β3=1.004 6。則電壓平均值uoav=4.98×1.004 6=5.003 V。可見,雖然此時刻檢測到的瞬時電壓uo低于設定值,但是依據上述算法判斷此時刻的電壓平均值高于設定值。
隨充電狀態的變化,修正系數變化不大,可以分時段調整修正系數。為保證控制準確度,用上一個雙渦卷相圖獲得的修正系數作為當前雙渦卷相圖的計算系數。
開關管S1、S2的占空比與輸出電流io的平均值和輸出電壓uo的平均值乘積成正比,根據輸出電流io和輸出電壓uo的變化,體外無線模塊用驅動電路實時高速地反饋調節開關管S1、S2的占空比,然后經過原邊線圈Lp和副邊線圈Ls耦合產生電能傳輸,再通過整流濾波電路得到輸出電壓uo。
上述控制方法通過檢測電壓uo、電流io,并將其分別與相應時刻的原邊線圈電壓uab的值構成相圖。在雙渦卷相圖中,用路徑Ⅰ~Ⅷ相互轉換的點①~⑦處的瞬時值代入上述計算式,經計算得到準確的平均值。這種快速檢測方法在每個開關周期內可計算得到8次準確的平均值(路徑Ⅰ運行到路徑Ⅷ兩次經過④點)。與傳統的數字濾波算法相比,有效減少了檢測時間,提高了反饋控制速度,故而其反饋控制效果更為優秀。
3 結果
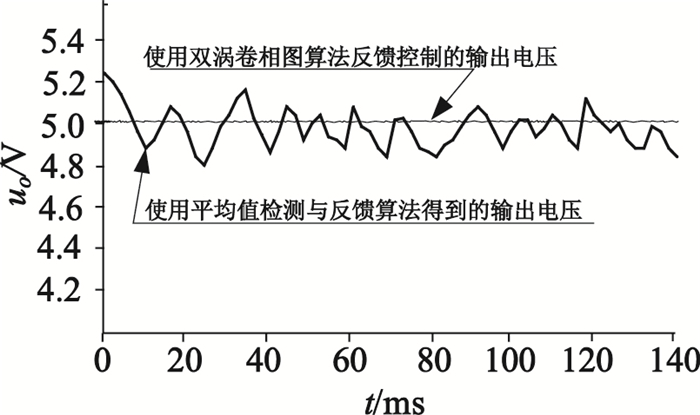
體外供電裝置的輸入直流電壓UDC=15 V,內置電路輸出電壓uo=5 V。充電電流隨時間變化,io<260 mA,開關頻率fs=68 kHz。充電芯片CN3068具有智能控制充電進程的功能,可自動控制充電與浮充等不同狀態。對內置電路的溫度檢測由內置無線模塊自帶的溫度檢測功能完成,不需要額外增加硬件電路。采用示波器觀測到的電路的輸出電壓如圖 5所示。用雙渦卷相圖算法檢測并反饋控制輸出電壓和電流的方案,跟蹤并用于反饋控制體外供電裝置的開關管,其輸出電壓uo的紋波率<±1.5%,該紋波已難以直觀地觀察,電路運行狀態穩定;而使用傳統的平均值檢測與反饋算法得到的輸出電壓,其紋波系數難于控制,且容易超出后級電路的允許電壓范圍并導致后級電路永久性損壞。
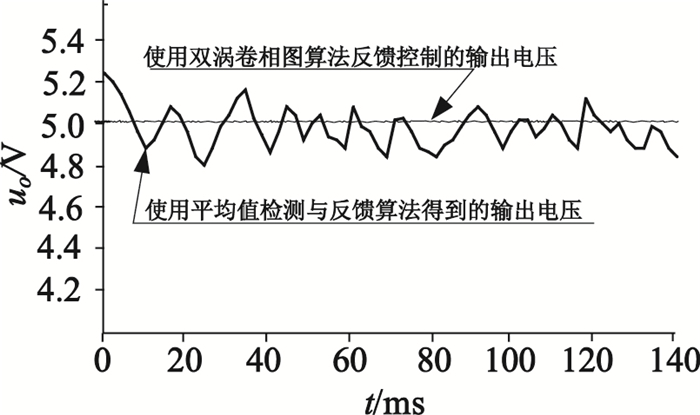 圖5
觀測結果
Figure5.
Observation results
圖5
觀測結果
Figure5.
Observation results
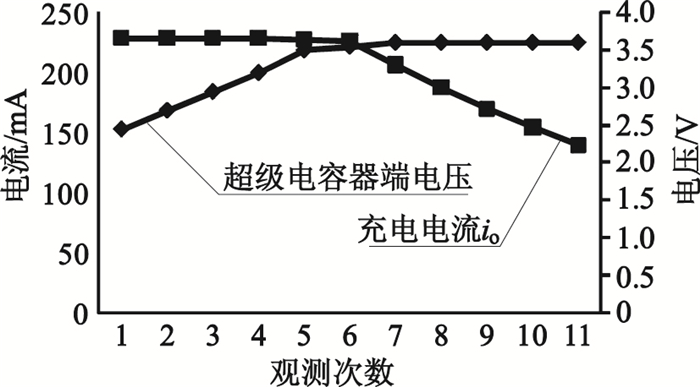
恒流充電與恒壓充電對應的測試結果如表 2所示。充電管理芯片CN3068是一款智能充電集成電路,通過改變CN3068的第2引腳(恒流充電電流設置和充電電流監測端)的外接電阻的阻值,可將其恒流充電階段的充電電流設定為不同的值。充電過程中電壓、電流變化關系如圖 6所示。
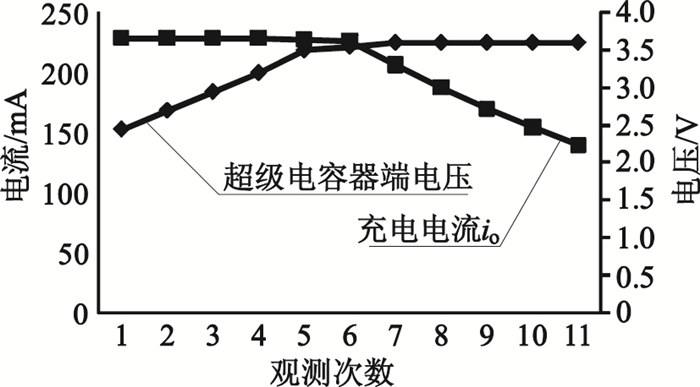 圖6
充電過程中電壓電流變化關系
Figure6.
In the process of charging voltage and current relationship
圖6
充電過程中電壓電流變化關系
Figure6.
In the process of charging voltage and current relationship
4 討論
本文提出一種基于混沌控制原理的雙渦卷相圖算法,能快速檢測心臟起搏器內置電源模塊輸出的電壓、電流值,以便快速跟蹤并反饋控制外置電源的輸出功率,使其輸出電壓保持穩定。
所用模塊CC2530內嵌增強型8051核,晶振頻率為32 MHz,一個完整的無線發射與接收過程,其通信周期為4μs,在一個完整的通信周期內,CC2530的模數轉換(Analog to Digital,A/D)端口能完成十幾次電壓、電流采樣(8位精度),采樣和通信過程基本不占用內核處理時間。考慮相圖算法與輸出控制信號的時間,跟蹤響應速度不超過2.68μs(<1/4開關周期),因此電路的檢測、通信與反饋控制總時間不超過6.68μs,即不超過開關器件的1/2開關周期,使用該方案檢測反饋的相圖算法準確性、實時性、電壓紋波率均滿足供電要求。
本文研究過程中,交流電壓uab檢測電路的設計難度較大。由于體外無線模塊中CC2530的A/D端口只能輸入正電壓信號,而電壓uab的檢測信號uab′是交流模擬信號,需要預先將電壓信號uab′疊加上一個正電壓信號,使交流信號變成正的脈動電壓信號,然后將該信號送到體外無線模塊中CC2530的A/D端口,經芯片內部自帶的的A/D轉換電路得到數字量,用該數字量減去疊加正電壓信號的數字量,即可獲得與電壓uab對應成比例的數字量。
實驗使用的充電管理芯片CN3068的允許電壓極限范圍為4.35 V~6 V,即使有短暫的沖擊電壓也會造成該芯片永久性損壞。該芯片含引腳的封裝尺寸為5.8×4.3×1.5 mm,為了確保充電管理芯片能持久正常工作,除在芯片前加過壓及過流保護電路外,還可以在硬件電路上增加備用CN3068芯片,當內置無線模塊檢測到正在使用的CN3068芯片故障時,可通過對該芯片的第1引腳(電池溫度檢測輸入端)的控制實現軟關斷,同時通過對備用芯片的TEMP引腳的控制可實現軟開通。
CC2530內置無線模塊除完成上述功能之外,還可用于產生起搏器電極的脈沖控制信號。這樣的電路可以實現起搏器和非接觸供電電路共用核心控制器件,電路的體積將更小,耗電量更少,可靠性更高,今后課題組將進一步深入開展相關研究。
0 引言
目前,心臟起博器常用一次性電池供電,到期需要將電池及起博器一并更換。因此,該供電方式需要對患者多次手術,給患者帶來極大痛苦并增加了整個醫療費用。為解決上述問題,近年來國內外一些專家學者提出了用非接觸充電裝置代替一次性電池,可為起搏器提供持續的電能供給,避免由于起搏器電池電量耗盡而造成的意外事故[1]。
傳統的心臟起搏器非接觸充電系統已具備起搏器供電方案[2-4],但對于這些裝置的穩壓原理探討尚不充分,沒有給出明確的穩壓范圍和能夠滿足充電管理電路(給超級電容器、起搏器提供充電管理的單元電路)的輸入電壓范圍的穩壓策略。此外尚需考慮人體能承受的溫升為2℃,減少內置電路的發熱因而具有重要的現實意義。并且要使非接觸供電裝置在心臟起搏器中得到廣泛應用,其使用年限至少需要達到一次性電池壽命的2~3倍以上。因此,如何保證該類供電裝置的使用年限、輸出電壓、電流的穩定性以及減少內置電路的發熱,是該類供電裝置實用化、市場化的關鍵。
起搏器非接觸供電系統的內置部分包含一個感應線圈(即副邊線圈),用于接收體外電能發送裝置發射的電能。副邊線圈的感應電壓為交流電,需通過整流和濾波電路轉變為直流電;對該直流電采用閉環反饋方法,由外置的穩壓調節電路穩壓;最后經充電管理電路輸出給超級電容及起搏器供電。上述方法可以省去內置部分的穩壓電路,省去該電路可顯著減少內置電路發熱,而且能提高內置電路的供電可靠性。
起搏器電源的內外模塊之間采用無線反饋控制方法[5]。由于供電裝置外置部分與內置部分的相對位置可能會發生變化,從而導致原、副邊線圈的耦合系數也隨之變化。因此,提高無線反饋的實時性是整個供電系統能夠可靠工作的關鍵。在常規的非接觸供電系統設計中,為提高信號抗干擾性能,其內置模塊的輸出電流、電壓檢測量常需要進行軟硬件濾波,尤其是數字濾波算法,往往需要提供幾個開關周期甚至十幾個開關周期的離散值,然后經過復雜的數值計算處理,再控制原邊開關器件的脈沖寬度調制(Pulse Width Modulation,PWM)信號的占空比,從而控制內置電源模塊輸出電壓、電流的幅值。上述方法實時性較差,無法滿足心臟起搏器非接觸供電的實時電壓調節要求。
針對上述用于心臟起搏器的非接觸供電電源所存在的問題,為了快速檢測心臟起搏器內置電源模塊輸出的電壓、電流值,本文提出一種基于混沌控制原理的雙渦卷相圖算法,以便快速跟蹤并反饋控制外置電源的輸出功率。仿真與實驗結果表明,采用所提出的控制方法,可使開關器件的響應時間縮短為不超過1/2開關周期,可有效提高信號的檢測時間,驗證了所提出檢測算法的可行性與有效性。
1 硬件系統分析
硬件系統包括體外非接觸供電裝置和體內充電裝置兩部分。體外非接觸供電裝置由非接觸供電電路、信號、驅動電路、電壓檢測電路和CC2530體外無線模塊組成,該裝置安裝在患者休息的床板下。體內充電裝置包括CC2530無線模塊、整流濾波電路、電壓與電流檢測電路、充電管理芯片CN3068、超級電容器及附屬電路。內置無線模塊和體外無線模塊采用點對點方式通信,體外無線模塊控制體外非接觸供電電路。非接觸充電電路原理如圖 1所示。
圖1
基于混沌檢測的非接觸充電電路原理圖
Figure1.
Chaos charging contact-less detection circuit schematic-based
當患者上床休息且內置電池欠壓,體外無線模塊即命令體外供電裝置供電,體外無線模塊I/O引腳輸出控制信號,該信號經過驅動電路作電平轉換后控制開關管S1、S2交替導通和斷開。分裂電感L1、L2和開關管S1、S2構成推挽變換電路[6-8],開關管采用金屬-氧化物半導體場效應晶體管(Metal Oxide Semiconductor Field Effect Transistor,MOSFET)器件IRF540。
原、副邊線圈(Lp、Ls)組成非接觸變壓器。副邊線圈Ls安裝在起搏器內邊緣。Ls獲得的感應電壓濾波后穩定的5 V直流,經充電管理芯片CN3068向內置電池充電。無線反饋控制方法的基本原理是:體內充電裝置內的傳感器檢測到體內整流、濾波電路的電壓uo與電流值io之后,通過內置無線模塊發送至體外無線接收模塊,體外無線模塊的內核運行雙渦卷相圖算法后得到控制方案,再應用體外無線接收模塊自帶的增強型單片機內核實時調節體外供電裝置的開關器件的占空比,就可以穩定整流、濾波電路的輸出電壓uo。用該輸出電壓uo給充電芯片供電,可以省去內置部分的穩壓電路。
2 依據相圖觀測的原理分析
在忽略原邊線圈Lp和副邊線圈Ls內阻的條件下,非接觸供電系統的穩態等效電路如圖 1右下角所示。其中,充電電路及起搏器等效為負載Ro,近似為一個正的動態電阻,Ro兩端的電流為io、電壓為uo。
| $\left\{ \begin{gathered} \frac{{{\text{d}}{u_p}}}{{{\text{d}}t}}=\frac{1}{{{C_p}}}\left({{i_{ab}}-{i_p}} \right) \hfill \\ \frac{{{\text{d}}{i_p}}}{{{\text{d}}t}}=\frac{1}{{{M^2}-{L_p}{L_s}}}\left({-{L_s}{u_p} + M{u_o}} \right) \hfill \\ \frac{{{\text{d}}{i_s}}}{{{\text{d}}t}}=\frac{1}{{{M^2}-{L_p}{L_s}}}\left({-M{u_p} + {L_p}{u_o}} \right) \hfill \\ \frac{{{\text{d}}{u_o}}}{{{\text{d}}t}}=\frac{1}{{{C_s}}}\left({{i_s}-\frac{{{u_o}}}{{{R_o}}}} \right) \hfill \\ \end{gathered} \right.$ |
令v=[up ip is uo]T為狀態向量,u=[iab]為輸入向量,B=[1/Cp 0 0 0]T。則系統模型為:
| $\dot v=Av + Bu$ |
設電路參數如下:Cp=1 200 nF,Cs=10 nF,=0.15 ≈5.26μH (M是可變的[14-15],此處為:設k=0.15時得到的M值),Lp=11μH,Ls=112μH,Ro=50Ω,將式(1)作無量綱處理,令a=1/Cp,b=1/(M2-LpLs),c=1/Ls,d=M,e=1/Lp,h=1/Cs,g=1/Ro,x=up,y=ip,z=is,w=uo,f(x)=iab,得到無量綱狀態方程:
| $\left\{ \begin{gathered} \frac{{{\text{d}}x}}{{{\text{d}}t}}=a\left[{f\left(x \right)-y} \right] \hfill \\ \frac{{{\text{d}}y}}{{{\text{d}}t}}=b\left({-cx + dw} \right) \hfill \\ \frac{{{\text{d}}z}}{{{\text{d}}t}}=b\left({-dx + ew} \right) \hfill \\ \frac{{{\text{d}}w}}{{{\text{d}}t}}=h\left({z-gw} \right) \hfill \\ \end{gathered} \right.$ |
2.1 推挽式變換器電路等效特性分析
將推挽式變換器電路等效為一個非線性等效電阻N1,電壓uab和電流iab的參考方向為非關聯參考方向,該電阻具有電源特性,故等效為負電阻。等效電阻N1的特性如圖 2所示。
圖2
電壓uab和電流iab的對照圖
Figure2.
Voltage uab and current iab comparison chart
uab與iab的相圖可等效為折線相圖,這種等效較為準確。為了簡化分析,進一步等效為折線負電阻,則三分段函數f(x)等效為:
| $\begin{gathered} f\left(x \right)={m_1}x + 0.5\left({{m_0}-{m_1}} \right)\left[{\left| {x + 20} \right|-\left| {x-20} \right|} \right]=\hfill \\ \left\{ \begin{gathered} {m_1}\left({x + 20} \right)\; \;x{\text{ & }}-20\;\; \;\; \;\; {D_{-1}}=\left\{ {x, y, z|x{\text{ #38; }}-20} \right\} \hfill \\ 0\;\; \;\; \;\; \;\; \;\; \;\; \;\; \;20{\text{ > }}x{\text{ > }}-20\;{D_0}=\left\{ {x, y, z|20{\text{ > }}x{\text{ > }}-20} \right\} \hfill \\ {m_1}\left({x-20} \right)\; \;x{\text{ > }}20\;\; \;\; \;\; \;\; \;{D_1}=\left\{ {x, y, z|x{\text{ > }}20} \right\} \hfill \\ \end{gathered} \right. \hfill \\ \end{gathered} $ |
式中,m1=4,m0=0。其中f(x)將相圖空間劃分成三段線性區域D1、D0、D-1。
則平衡點處的方程為:
| $\left\{ \begin{gathered} 0=a\left[{f\left(x \right)-y} \right] \hfill \\ 0=b\left({-cx + dw} \right) \hfill \\ 0=b\left({-dx + ew} \right) \hfill \\ 0=h\left({z-gw} \right) \hfill \\ \end{gathered} \right.$ |
則求解三分段函數的線性化狀態方程、平衡點、雅克比矩陣、特征值、特征向量、特征空間直線與特征平面的數值計算詳見文獻[16]。
2.2 算法分析
開關器件的頻率為fs=68 kHz,副邊線圈Ls獲得的感應電壓為該頻率交流電經整流與濾波電路得到的電壓uo、電流io均有68 kHz紋波,濾波電路的濾波電容和電感Ldc、Cdc1、Cdc2不能無限選取。合理選擇濾波器件的濾波容量,使紋波控制在一定范圍內,這樣既能保證電路性能可靠,又能使電路體積滿足需要,該濾波電路經過適當選型,使電路的靜態紋波控制在±6‰以內。該紋波由直流信號和疊加開關器件的基頻微變信號組成。準確捕捉電流信號、電壓信號中基頻微變信號所處的相位,即可精確地判斷該信號的平均值。其相位的準確信息通過觀測這兩個信號與參照信號的混沌相圖方法得到,取電壓uab的采樣信號作為參照信號。
非接觸副邊線圈Ls安裝在起搏器內邊緣,患者身體移動、翻身均會影響磁場耦合關系。由于非接觸電路磁場耦合關系和負載雙重變化,實時獲取輸出電壓、電流的變化以便快速跟蹤并反饋控制極為重要,應用常規的濾波算法反饋控制非接觸電路,實時性較差,出現磁場耦合晃動等劇烈變化時,紋波率最大可超過±20%,不滿足非接觸供電的實時調節要求,嚴重時會導致后級充電管理芯片擊穿。
混沌檢測方案采用檢測電壓uab和電流io雙渦卷對照圖的方法,依據相圖的流形相對位置判斷包含68 kHz紋波的電流io與電壓uo平均值的變化情況。
電壓uab和電流io的雙渦卷對照圖如圖 3所示。左圖示出當電壓uab的平均值不變時,該電壓與電流io的相圖為渦卷式上升或下降流形。圖 3的中圖和右圖將電壓uab和電流io的雙渦卷相圖分解為Ⅰ~Ⅷ階段,各階段的起始點為①~⑦點。這7個點是零值點或極值點:①點、⑤點為電流io的極大值點,③點、⑦點為電流io的極小值點,⑥點、②點為電壓uab的極大值點和極小值點,④為電壓uab的零值點。電壓uab和電流io的雙渦卷特性分析如表 1所示。
圖3
雙渦卷對照圖
Figure3.
Double scroll control map
路徑Ⅰ~Ⅷ中電壓uab和電流io在雙渦卷相圖中具有不同的特征,只要找出任意兩個時間點的檢測信號,判斷電壓uab和電流io分別處于上升還是下降狀態,再判斷電壓uab的瞬時極性,即可判斷這兩個時間點所處的路徑。找到所處的路徑后再判斷是否越過零極值點①~⑦,當電壓uab、輸出電壓uo或輸出電流io出現實質性的變化,即出現過零或由上升轉入下降或由下降轉入上升的情況,意味著雙渦卷相圖運行在越過零極值點并切換路徑的時刻。雙渦卷相圖算法的核心思想是用電壓uab作參考得到相圖和相圖中的路徑,找到路徑切換的零極值點,用這些特定點實時判斷輸出電壓uo和輸出電流io的平均值的大小。
雙渦卷相圖算法的流程圖如圖 4所示。
圖4
雙渦卷相圖算法流程圖
Figure4.
Double scroll phase diagram algorithm flow chart
相圖分析算法的具體過程為:首先判斷電壓uab的瞬時極性是否等于零或大于零,然后判斷電壓uab是處于上升狀態[uab(n)-uab(n-1)≥0],還是下降狀態[uab(n)-uab(n-1)<0];再判斷電流io(n)是處于上升狀態[io(n)-io(n-1)≥0],還是下降狀態[io(n)-io(n-1)<0]。共分為9種情況:
(1)當電壓采樣值uab(n)=0時,原邊線圈電壓uab與副邊輸出電流io、電壓uo的對應關系位于如圖 3所示的相圖點④。該點對應的輸出電流io的值是228.4 mA,其修正系數α4=(229.1/228.4)≈1.003 1;同時,該點對應的輸出電壓uo為4.988 V,其對應的修正系數β4=(5.003/4.988)≈1.003。取得點④的瞬時值后,依據修正系數可計算出輸出電流平均值ioav=io(n-1)×α4=229.1 mA,輸出電壓平均值uoav=uo(n-1)×β4=5.003 V。
輸出電壓uo和輸出電流io的質量取決于整流濾波電路的性能好壞,當電路中各元件參數確定后,修正系數α4和β4的值在一個開關周期內基本保持不變,因此可用作下一個雙渦卷相圖對應點④的修正系數。
(2)當電壓uab>0,且電壓uab處于下降狀態uab(n)-uab(n-1)<0,電流io(n)處于上升狀態io(n)-io(n-1)≥0時,此時的雙渦卷相圖位于路徑Ⅶ的狀態,令n=n+1,直到新的uab(n)<0[即uab(n-1)≥0不成立],則前一個采樣值uab(n-1)最接近于圖 3雙渦卷相圖的點④。輸出電流io的修正系數α4和輸出電壓uo的修正系數β4計算方法同上。
(3)當電壓uab>0,且電壓uab處于下降狀態uab(n)-uab(n-1)<0,電流io(n)處于下降狀態io(n)-io(n-1)<0時,此時的雙渦卷相圖位于路徑Ⅵ的狀態,令n=n+1,直到io(n)-io(n-1)>0,則前一個采樣值uab(n-1)最接近于圖 3的雙渦卷相圖的⑦點。⑦點的輸出電流io的修正系數α7=(229.1/228.05)≈1.004 6。此時對應的圖 3雙渦卷相圖的電壓uo為4.981 V,電壓平均值uoav為5.003 V,可見,⑦點輸出電壓uo的修正系數β7=(5.003/4.981)≈1.004 4。平均值ioav=io(n-1)×系數α7,平均值uoav=uo(n-1)×系數β7。
(4)當電壓uab>0,且電壓uab處于上升狀態uab(n)-uab(n-1)≥0,電流io(n)處于下降狀態io(n)-io(n-1)<0時,此時的雙渦卷相圖位于路徑Ⅴ的狀態,令n=n+1,直到uab(n)-uab(n-1)<0,則前一個采樣值uab(n-1)最接近于圖 3雙渦卷相圖的⑥點。輸出電流io的修正系數α6和輸出電壓uo的修正系數β6計算方法同上。
(5)當電壓uab>0,且電壓uab處于上升狀態uab(n)-uab(n-1)≥0,電流io(n)處于上升狀態io(n)-io(n-1)≥0時,此時的雙渦卷相圖位于路徑Ⅳ的狀態,令n=n+1,直到io(n)-io(n-1)<0,則前一個采樣值uab(n-1)最接近于圖 3雙渦卷相圖的點⑤。輸出電流io的修正系數α5和輸出電壓uo的修正系數β5計算方法同上。
(6)當電壓uab<0,且電壓uab處于上升狀態uab(n)-uab(n-1)≥0,電流io(n)處于上升狀態io(n)-io(n-1)≥0時,此時的雙渦卷相圖位于路徑Ⅲ的狀態,令n=n+1,直到uab(n)>0成立,則前一個采樣值uab(n-1)最接近于圖 3雙渦卷相圖的④點。輸出電流io的修正系數α4和輸出電壓uo的修正系數β4計算方法同上。
(7)當電壓uab<0,且電壓uab處于上升狀態uab(n)-uab(n-1)≥0,且電流io(n)處于下降狀態io(n)-io(n-1)<0時,此時的雙渦卷相圖位于路徑Ⅱ的狀態,令n=n+1,直到io(n)-io(n-1)≥0成立,則前一個采樣值uab(n-1)最接近于圖 3雙渦卷相圖的③點。輸出電流io的修正系數α3和輸出電壓uo的修正系數β3計算方法同上。
(8)當電壓uab<0,且電壓uab處于下降狀態uab(n)-uab(n-1)<0,電流io(n)處于下降狀態io(n)-io(n-1)<0時,此時的雙渦卷相圖位于路徑Ⅰ的狀態,令n=n+1,直到uab(n)-uab(n-1)≥0成立,則前一個采樣值uab(n-1)最接近于圖 3雙渦卷相圖的②點。輸出電流io的修正系數α2和輸出電壓uo的修正系數β2計算方法同上。
(9)當電壓uab<0,且電壓uab處于下降狀態uab(n)-uab(n-1)<0,電流io(n)處于上升狀態io(n)-io(n-1)≥0時,此時的雙渦卷相圖位于路徑Ⅷ的狀態,令n=n+1,直到io(n)-io(n-1)<0成立,則前一個采樣值uab(n-1)最接近于圖 3雙渦卷相圖的①點。輸出電流io的修正系數α1和輸出電壓uo的修正系數β1計算方法同上。
設已獲得圖 3中③點的電流io值為228 mA,則此時對應的瞬時電壓uo為4.98 V,已知上一個雙渦卷相圖③點的修正系數β3=1.004 6。則電壓平均值uoav=4.98×1.004 6=5.003 V。可見,雖然此時刻檢測到的瞬時電壓uo低于設定值,但是依據上述算法判斷此時刻的電壓平均值高于設定值。
隨充電狀態的變化,修正系數變化不大,可以分時段調整修正系數。為保證控制準確度,用上一個雙渦卷相圖獲得的修正系數作為當前雙渦卷相圖的計算系數。
開關管S1、S2的占空比與輸出電流io的平均值和輸出電壓uo的平均值乘積成正比,根據輸出電流io和輸出電壓uo的變化,體外無線模塊用驅動電路實時高速地反饋調節開關管S1、S2的占空比,然后經過原邊線圈Lp和副邊線圈Ls耦合產生電能傳輸,再通過整流濾波電路得到輸出電壓uo。
上述控制方法通過檢測電壓uo、電流io,并將其分別與相應時刻的原邊線圈電壓uab的值構成相圖。在雙渦卷相圖中,用路徑Ⅰ~Ⅷ相互轉換的點①~⑦處的瞬時值代入上述計算式,經計算得到準確的平均值。這種快速檢測方法在每個開關周期內可計算得到8次準確的平均值(路徑Ⅰ運行到路徑Ⅷ兩次經過④點)。與傳統的數字濾波算法相比,有效減少了檢測時間,提高了反饋控制速度,故而其反饋控制效果更為優秀。
3 結果
體外供電裝置的輸入直流電壓UDC=15 V,內置電路輸出電壓uo=5 V。充電電流隨時間變化,io<260 mA,開關頻率fs=68 kHz。充電芯片CN3068具有智能控制充電進程的功能,可自動控制充電與浮充等不同狀態。對內置電路的溫度檢測由內置無線模塊自帶的溫度檢測功能完成,不需要額外增加硬件電路。采用示波器觀測到的電路的輸出電壓如圖 5所示。用雙渦卷相圖算法檢測并反饋控制輸出電壓和電流的方案,跟蹤并用于反饋控制體外供電裝置的開關管,其輸出電壓uo的紋波率<±1.5%,該紋波已難以直觀地觀察,電路運行狀態穩定;而使用傳統的平均值檢測與反饋算法得到的輸出電壓,其紋波系數難于控制,且容易超出后級電路的允許電壓范圍并導致后級電路永久性損壞。
圖5
觀測結果
Figure5.
Observation results
恒流充電與恒壓充電對應的測試結果如表 2所示。充電管理芯片CN3068是一款智能充電集成電路,通過改變CN3068的第2引腳(恒流充電電流設置和充電電流監測端)的外接電阻的阻值,可將其恒流充電階段的充電電流設定為不同的值。充電過程中電壓、電流變化關系如圖 6所示。
圖6
充電過程中電壓電流變化關系
Figure6.
In the process of charging voltage and current relationship
4 討論
本文提出一種基于混沌控制原理的雙渦卷相圖算法,能快速檢測心臟起搏器內置電源模塊輸出的電壓、電流值,以便快速跟蹤并反饋控制外置電源的輸出功率,使其輸出電壓保持穩定。
所用模塊CC2530內嵌增強型8051核,晶振頻率為32 MHz,一個完整的無線發射與接收過程,其通信周期為4μs,在一個完整的通信周期內,CC2530的模數轉換(Analog to Digital,A/D)端口能完成十幾次電壓、電流采樣(8位精度),采樣和通信過程基本不占用內核處理時間。考慮相圖算法與輸出控制信號的時間,跟蹤響應速度不超過2.68μs(<1/4開關周期),因此電路的檢測、通信與反饋控制總時間不超過6.68μs,即不超過開關器件的1/2開關周期,使用該方案檢測反饋的相圖算法準確性、實時性、電壓紋波率均滿足供電要求。
本文研究過程中,交流電壓uab檢測電路的設計難度較大。由于體外無線模塊中CC2530的A/D端口只能輸入正電壓信號,而電壓uab的檢測信號uab′是交流模擬信號,需要預先將電壓信號uab′疊加上一個正電壓信號,使交流信號變成正的脈動電壓信號,然后將該信號送到體外無線模塊中CC2530的A/D端口,經芯片內部自帶的的A/D轉換電路得到數字量,用該數字量減去疊加正電壓信號的數字量,即可獲得與電壓uab對應成比例的數字量。
實驗使用的充電管理芯片CN3068的允許電壓極限范圍為4.35 V~6 V,即使有短暫的沖擊電壓也會造成該芯片永久性損壞。該芯片含引腳的封裝尺寸為5.8×4.3×1.5 mm,為了確保充電管理芯片能持久正常工作,除在芯片前加過壓及過流保護電路外,還可以在硬件電路上增加備用CN3068芯片,當內置無線模塊檢測到正在使用的CN3068芯片故障時,可通過對該芯片的第1引腳(電池溫度檢測輸入端)的控制實現軟關斷,同時通過對備用芯片的TEMP引腳的控制可實現軟開通。
CC2530內置無線模塊除完成上述功能之外,還可用于產生起搏器電極的脈沖控制信號。這樣的電路可以實現起搏器和非接觸供電電路共用核心控制器件,電路的體積將更小,耗電量更少,可靠性更高,今后課題組將進一步深入開展相關研究。