機械通氣是臨床上用于改善患者呼吸的重要輔助手段, 所以機械通氣參數設定的正確與否直接影響著患者體內的氣體交換過程。本文嘗試建立一種基于人體肺部氣體交換數學模型的機械通氣模糊邏輯決策系統。人體肺部氣體交換數學模型可以根據患者的生理參數模擬出患者的肺部氣體交換情況, 便于臨床醫生更好地了解和掌握患者的病情。決策系統應用模糊控制的方法提出適合患者的機械通氣設定參數, 為臨床醫生進行機械通氣的設置提供參考。實驗選取10名在ICU接受機械通氣治療的患者, 系統根據每一位患者的生理參數建立了相應的氣體交換數學模型, 并提供了適合患者的機械通氣設定參數, 與患者當前接受的機械通氣設定參數進行對比。結果表明系統提出的機械通氣設定參數在滿足患者氣體交換要求的前提下盡可能地降低了吸入氧濃度的值, 在滿足分鐘通氣量的前提下盡可能地降低患者呼吸功, 改善了患者的氣體交換情況。
引用本文: 王春飛, 陳戰. 一種基于模型的機械通氣模糊邏輯決策系統. 生物醫學工程學雜志, 2016, 33(4): 786-793. doi: 10.7507/1001-5515.20160127 復制
版權信息: ?四川大學華西醫院華西期刊社《生物醫學工程學雜志》版權所有,未經授權不得轉載、改編
引言
臨床上將機械通氣作為糾正低血氧癥和高血酸癥的常規手段,在重癥監護治療中起著非常重要的作用。為了適應患者自身多變的情況,機械通氣的參數設定也不盡相同,不正確的機械通氣參數有可能造成患者肺部的損傷,甚至危及生命。
在過去的幾十年中,為了滿足臨床的需求,呼吸機的發展取得了長足的進步,針對患者不同的需求開發出了多種呼吸模式和控制系統[1-6]。這些系統著眼于運用臨床的治療準則和實踐經驗,能夠根據患者的情況自動調節呼吸參數[1-5],達到讓機械通氣的患者呼吸功最小、呼吸最舒暢[5-6],以致最終完成順利脫機的目的。但是這類系統的著眼點比較局限,僅僅以改善患者部分生理參數為目標,不能兼顧患者的整體情況,也不能對患者的狀態做一個預先的判斷。
臨床上任何呼吸機的設定都是以改善患者的氣體交換為目的,醫生希望通過調整呼吸機的參數使得患者的狀態向正常的狀態發展。所以如果患者的病情未能按照醫生的期望發展,醫生就需要根據患者血氣分析的情況重新調整呼吸機的設置或者治療方案。如果能夠針對患者的情況建立呼吸系統的人體模型,就可以模擬患者的氣體交換情況,也可以模擬機械通氣的參數改變對患者的影響。
基于人體生理模型的機械通氣決策系統[7-9]是一項逐漸發展起來的另一類呼吸機輔助控制系統。系統以人體的生理模型為基礎,根據患者的生理參數設定模型的參數,使得模型能夠反映患者的生理狀態。系統根據患者的生理模型以及專家知識庫形成適合患者的機械通氣參數,為臨床醫生的機械通氣策略和參數設定提供參考,或者直接控制呼吸機實施機械通氣。但是因為不同患者呼吸系統的病理和生理情況不一樣,如何準確地模擬患者的真實狀況成了系統實現的難點。
本文介紹了一種基于知識系統和人體模型仿真的決策系統。系統嘗試建立一個人體的呼吸系統模型以真實地模擬不同患者的氣體交換情況,根據患者的呼吸模型,運用臨床治療原則和模糊邏輯的理論,為臨床醫務人員提供適合患者的機械通氣設定參數建議。
1 材料和方法
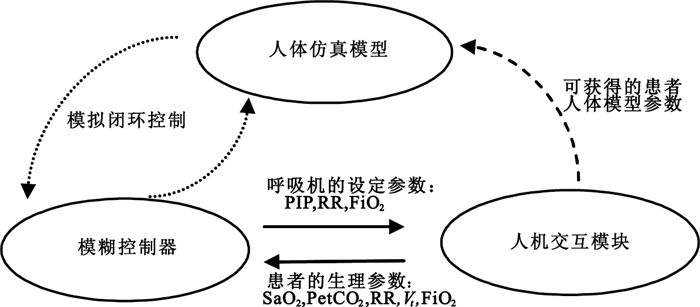
系統由三部分組成:人機交互模塊、人體仿真模型、模糊控制器,其結構如圖 1所示。系統通過人機交互界面獲得患者的生理參數以及人體仿真模型所需的參數。人體仿真模型根據獲得的參數模擬患者的氣體交換情況。模糊控制器將患者的生理參數作為輸入,與人體仿真模型進行模擬閉環控制,輸出穩定后作為呼吸機設定的參考值反饋到人機交互模塊。下面將分別介紹各模塊功能。
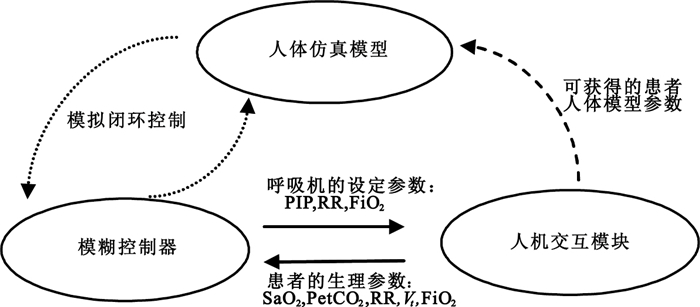 圖1
系統結構圖
Figure1.
Structure of the system
圖1
系統結構圖
Figure1.
Structure of the system
1.1 人體氣體交換模型
1.1.1 人體氣體交換的數學模型
Riley等[10]早期提出肺氣體運輸的簡化模型——單腔肺來模擬生理狀態的肺氣體交換,指出肺氣體運輸的阻力存在于:①肺分流(Shunt):即部分肺泡僅有灌注,無通氣。②由肺泡-肺毛細血管膜造成的氣體由肺泡向肺毛細血管彌散的阻力(Rdiff)。Petros等[11]發現肺通氣、彌散和灌注的不均質性(),提出不均質性的肺模型——雙腔肺,以及肺氣體交換中存在彌散與灌注不匹配。后來Andreassen和Rees等[12-13]提出雙腔肺的氣體運輸模型,利用氧運輸的雙參數數學模型,將肺氣體運輸的阻力描述為肺內分流(fs)和通氣/灌注(fA2)不匹配雙重作用。
Karbing等[14]通過臨床實際對比應用,認為單腔肺模型的模擬值與臨床患者的實際檢測值只有3%吻合,而雙腔肺模型的模擬值與臨床患者的實際檢測值有80%吻合。由此說明雙腔肺模型能更好地模擬患者的實際情況。本文選取雙腔肺模型作為氣體交換模型。
雙腔肺模型是根據人體呼吸生理學和氣體交換平衡方程等推導出來的一系列描述人體內氧氣及二氧化碳交換、運輸、代謝的數學公式,它能夠描述人體呼吸參數的改變對體內氣體交換的影響。模型將人體氣體交換過程劃分為五部分:肺泡通氣、肺泡氣體交換、肺部分流、人體血液運輸、組織氣體交換。每部分所進行的氣體交換描述如下:①人體通過呼吸將肺泡中的氣體與大氣進行交換,提高肺泡中的氧氣含量,降低二氧化碳的含量。②靜脈血通過肺動脈和肺泡毛細血管與肺泡內的氣體進行交換,氧氣通過毛細血管進入血液并發生氧合反應,同時釋放血液中的二氧化碳到肺泡中。氧氣和二氧化碳的交換比率滿足Fick定律[15]。③一部分靜脈血沒有參加氣體交換而是直接與氧合后的動脈血在動脈腔中相混合,這就形成了肺內分流。④動脈血運送至全身,并與人體組織發生氣體交換。氣體交換的量取決于血液中氣體的含量、組織中氧氣代謝量和二氧化碳的產生量。
1.1.2 人體呼吸肺部力學模型
人體呼吸時氣體經過口鼻腔、氣管、支氣管進入肺泡。根據Weibel[16]的研究,將肺部的支氣管樹分為23級,每一級都具有不同的力學特性,其順應性和呼吸阻力也各不相同。由此可以建立起肺部完整的力學數學模型。本文中為了研究方便,采取了簡化的肺部力學模型,將人體的肺看成一個整體,針對這個整體給出一個綜合的肺順應性和呼吸阻力參數。利用這個人體肺力學模型,可以簡單地反映肺呼吸時的潮氣量(Vt)和吸入氣體峰值壓力(peak inspiratory pressure, PIP)的關系。
1.1.3 模型中的參數設定
通過對患者的血氣分析以及應用無創的方法采集到的患者的血氧飽和度(SpO2)、呼末二氧化碳分壓(PetCO2)等生理參數可以獲得模型中參數的值。患者的肺內死腔容積采用患者的標準體重計算獲得(2.2 mL/kg)。
對于fs和fA2可以采用加權最小二乘法進行估算,使得模型能夠最大限度地模擬患者真實的肺部氣體交換情況。還可以根據De Gray等[17]介紹的方法,通過對吸入氧濃度(FiO2)/動脈血氧飽和度(SaO2)曲線的分析,預測fs和fA2的值,使得模型仿真出來的結果與實測數據的擬合曲線最接近。
1.2 模糊控制器
本課題中的模糊控制器是基于呼吸機壓力支持模式下采用模糊控制策略實現對呼吸機參數的設定。控制器設定5個輸入和3個輸出。5個輸入分別是患者SaO2、FiO2、PetCO2、呼吸頻率(RR)和Vt,基本涵蓋了機械通氣中與氣體交換相關的人體生理參數。3個輸出為呼吸機壓力支持模式下的吸入氣體壓力(Pinsp)、FiO2以及機械通氣的頻率(F)。
1.2.1 輸入輸出模糊化
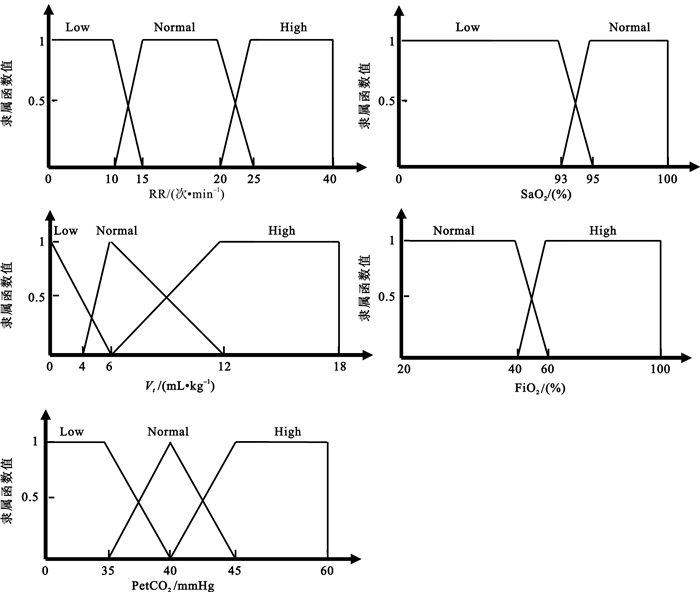
模糊化是將模糊控制器輸入量的確定值轉化為相應模糊語言變量的過程,它是實現模糊控制的一個重要過程。本課題中采用trimf和trapmf兩種隸屬度函數,將輸入劃分為區間結構。SaO2分為2個區間,FiO2分為2個區間,PetCO2分為3個區間,Vt分為3個區間,RR分為3個區間,如圖 2所示。
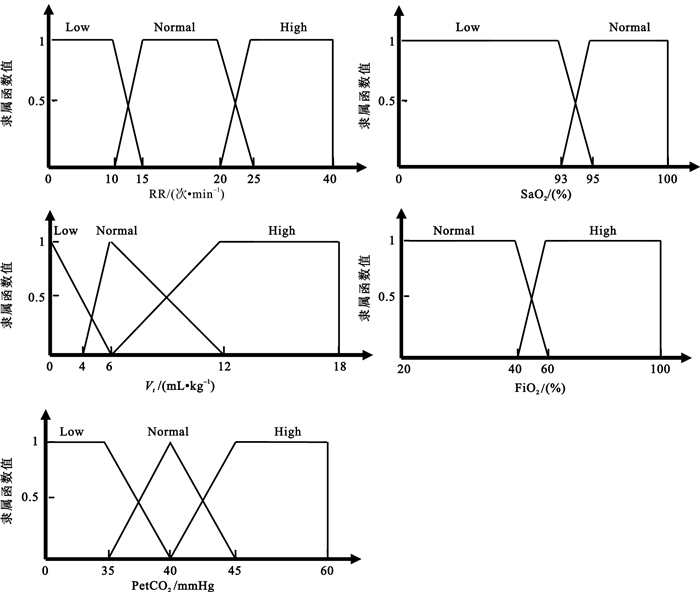 圖2
輸入模糊化示意圖
Figure2.
Input fuzzy set structure
圖2
輸入模糊化示意圖
Figure2.
Input fuzzy set structure
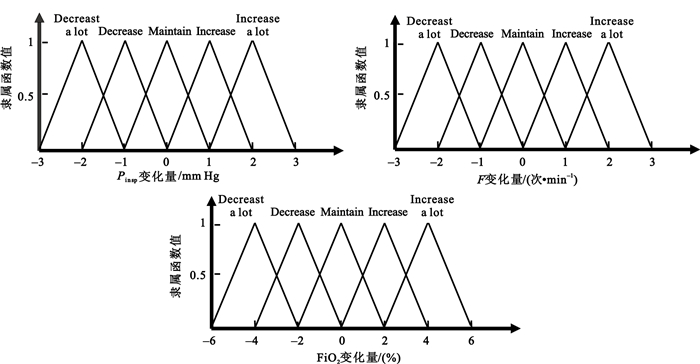
對于輸出控制量也以區間結構表示。Pinsp、FiO2和F均被分為5個區間,分別為“降低一些”“降低”“維持現狀”“增加”和“增加一些”,如圖 3所示。
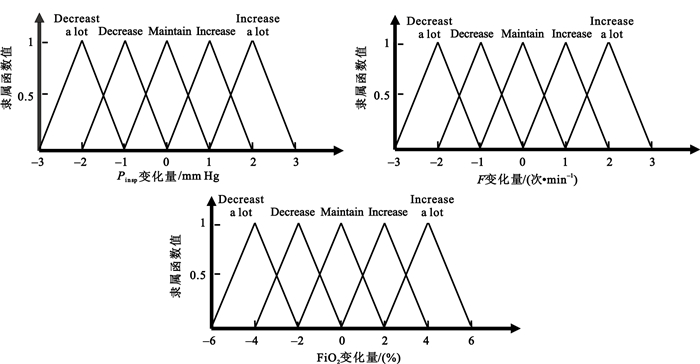 圖3
輸出模糊化示意圖
Figure3.
Output fuzzy set structure
圖3
輸出模糊化示意圖
Figure3.
Output fuzzy set structure
1.2.2 模糊控制規則和清晰化計算
模糊控制系統是用一系列基于專家知識的語言來描述表達的,專家知識常采用形如“if…then…”條件語句的形式。用一系列這樣的條件語句描述表達的模糊控制規則就構成了模糊控制規則集合。本課題有5個輸入,基于系統的控制原理和臨床的實踐經驗制定了2×2×3×3×3=108條模糊控制規則,所有規則需滿足以下幾點:
(1)?如果PetCO2升高,則增加F,增大吸入氣體壓力,進而增加分鐘通氣量。
(2)?如果SaO2<85%,并且FiO2>60%,則增大吸入氣體壓力Pinsp,增加潮氣量。
(3)?如果SaO2低,并且FiO2,RR和Pinsp都在正常范圍內,則首先增加F,其次增加FiO2,最后增加Pinsp。
(4)?如果SaO2低,PetCO2低,則升高FiO2,降低Pinsp和F。
(5)?如果Vt高,則降低潮氣量,增加F。
根據以上原則,列舉三條模糊控制規則如下:
①IF SaO2=low and RR=normal and FiO2=high and Vt=normal and PetCO2=normal, THEN Pinsp=increase and F=Maintain and FiO2=Maintain.
②IF SaO2=low and RR=normal and FiO2=high and Vt=normal and PetCO2=low, THEN Pinsp=decrease and F=Maintain and FiO2=increase.
③IF SaO2=low and RR=normal and FiO2=normal and Vt=high and PetCO2=normal, THEN Pinsp=decrease a lot and F=increase and FiO2=increase.
通過模糊推理得到模糊輸出值,這里我們采用加權平均法將模糊輸出集合清晰化,轉化為精確的控制量。
1.3 人機交互模塊
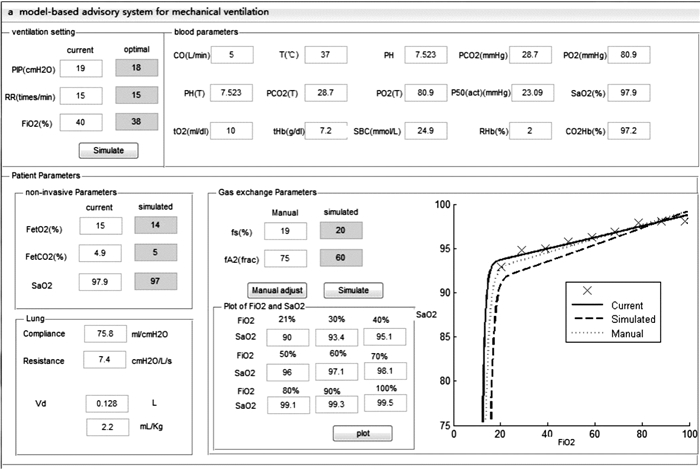
人機交互模塊是臨床醫生與系統進行信息交換的接口。如圖 4所示,左上角的呼吸機設定功能,醫生可以輸入患者當前的機械通氣參數,系統可以仿真出患者最佳的機械通氣設定值,從而為醫生提供參考。右上角的區域,醫生可以輸入患者的血氣分析檢測結果以及患者的心輸出量等患者的相關參數值,系統根據這些參數用于建立和調整該名患者當前的肺部氣體交換模型。左下部分是患者的肺部相關參數,包括肺的順應性、呼吸阻力以及肺的死腔容積。右下部分,系統根據患者當前的肺部氣體交換模型,利用加權最小二乘法估算出患者當前的fs和fA2。同時醫生也可以根據De Gray等[17]介紹的方法,將FiO2從21%至100%取9個值,每次更改吸入氣體氧濃度后5~10 min,采集SaO2或SpO2。所得的數據通過描點法擬合出FiO2/SaO2曲線。系統也可以根據估算的fs和fA2相關值,獲得仿真后的FiO2/SaO2曲線,如果醫生對估算的數值不滿意,還可以手動更改fs和fA2的值,同樣也獲得一條FiO2/SaO2曲線。三條不同參數的FiO2/SaO2曲線可以同時描繪在右下區域的界面中,便于醫生更好地判斷患者的狀況。
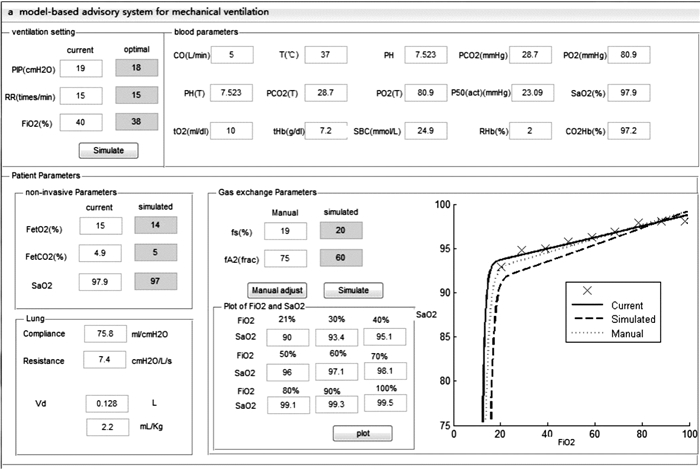 圖4
人機交互界面
Figure4.
User-device interface of the decision support system
圖4
人機交互界面
Figure4.
User-device interface of the decision support system
2 結果
選取在重癥加強護理病房(intensive care unit, ICU)內接受機械通氣的患者10人,7名男性,3名女性, 具體信息如表 1所示。所有患者都患有急性呼吸窘迫綜合征(acute respiratory distress syndrome,ADRS), 需要借助呼吸機進行輔助呼吸。患者的SaO2以及PetCO2是通過床邊監護儀(Drager Infinity Delta XL, Lubeck, Germany)測得。FiO2、RR、Vt、F、肺的順應性和呼吸阻抗等參數是從呼吸機(Drager Evita 4, Lubeck, Germany)上觀察得到。患者的血液相關參數由血氣分析儀(ABL90, Radiometer, Danmark)測得。實驗內容已告知患者及家屬,并通過了相關醫學倫理審查。
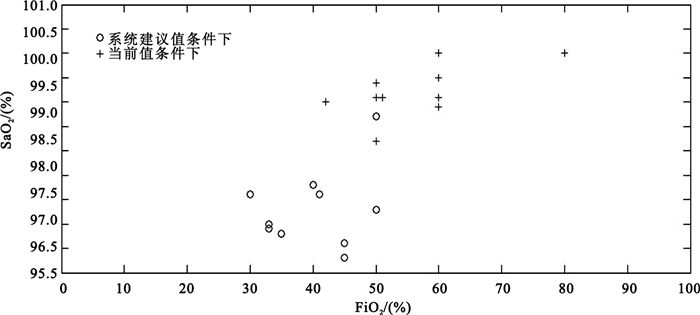
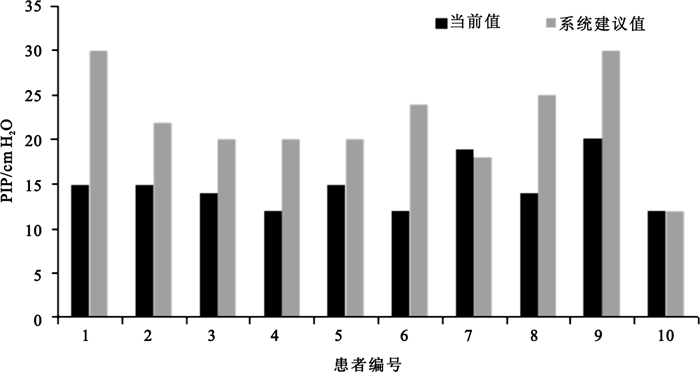
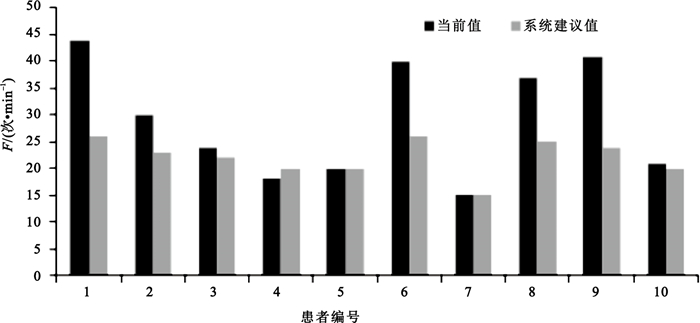
根據患者的各項生理參數,系統對10個患者的氣體交換情況進行建模仿真,并通過仿真給出患者當前適宜的機械通氣相關設定參考值(PIP、F、FiO2)。如圖 5所示,是10個患者在系統建議FiO2和當前FiO2條件下測得的患者SaO2對比圖。如圖 6、圖 7所示,是在機械通氣壓力輔助支持(pressure support ventilation, PSV)模式下通過系統模擬仿真后給出呼吸機的PIP以及RR與10個患者當前所接受的機械通氣相關參數的對比圖。
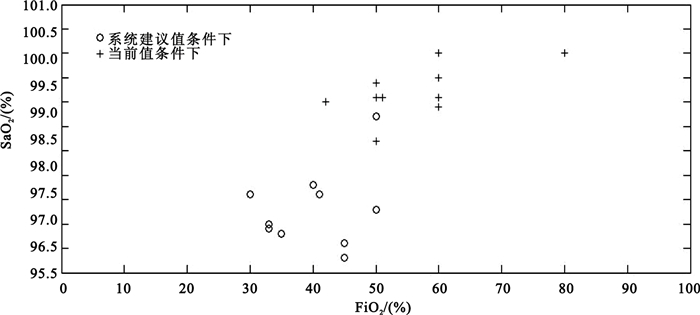 圖5
在系統建議FiO2與當前FiO2條件下測得的患者SaO2對比圖
Figure5.
Comparison of patient's SaO2 with system simulated FiO2 and current FiO2
圖5
在系統建議FiO2與當前FiO2條件下測得的患者SaO2對比圖
Figure5.
Comparison of patient's SaO2 with system simulated FiO2 and current FiO2
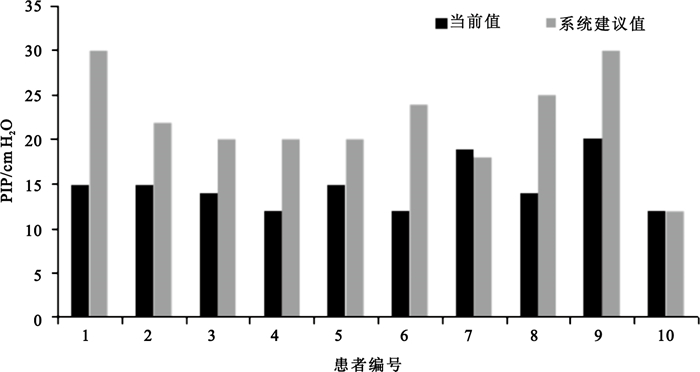 圖6
系統建議PIP值與當前呼吸機設定PIP值對比圖
Figure6.
Comparison of clinical values of PIP with system simulated PIP
圖6
系統建議PIP值與當前呼吸機設定PIP值對比圖
Figure6.
Comparison of clinical values of PIP with system simulated PIP
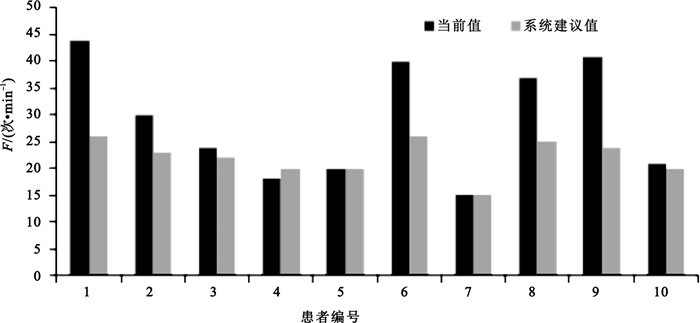 圖7
系統建議機械通氣頻率F值與當前呼吸機設定值F對比圖
Figure7.
Comparison of ventilator's current F with system simulated F
圖7
系統建議機械通氣頻率F值與當前呼吸機設定值F對比圖
Figure7.
Comparison of ventilator's current F with system simulated F
3 討論
本文介紹了一種基于模型的機械通氣模糊邏輯決策系統,系統旨在應用數學建模的方式利用已獲取的患者生理參數對患者肺部的氣體交換情況進行建模仿真,并根據模糊控制系統在已建立的氣體交換模型的基礎上仿真出患者適宜的機械通氣設定參數,以此向臨床的呼吸機使用人員提供參數設定的參考。
與目前廣泛研究的機械通氣自動調節系統相比,基于模型的機械通氣模糊邏輯決策系統具有以下幾個優點:①系統的人體氣體交換數學模型可以很好地模擬仿真患者真實的肺部氣體交換情況;②基于模糊邏輯的控制系統是基于專家知識庫和臨床治療準則和實踐經驗的基礎上制定的模糊控制規則,規則能夠很好地體現臨床的實際要求,控制的安全性、準確性相對較高;③機械通氣參數預先在人體氣體交換模型中進行模擬仿真,可以使獲得的參數更能符合患者自身病情的需要,而且可以對機械通氣參數的改變對患者的影響有個預判;④仿真所得到的機械通氣參數設定的參考值可以在滿足患者自身機械通氣的臨床需求下盡可能地降低氧氣的消耗,降低患者的呼吸功,減小機械通氣對患者肺部造成的機械損傷。
肺內分流、通氣/灌注比、生理死腔容積是反映患者氣體交換狀態的重要參數。肺內分流可以反映患者肺內存在肺泡塌陷的情況,肺泡塌陷使得肺泡無法通氣,流經塌陷肺泡的血液沒有經過氣體交換直接與動脈血混合,降低了動脈血氧分壓,造成患者的低血氧癥。通氣/灌注比則反映患者肺泡通氣和血液灌注的匹配情況,生理死腔容積則反映患者的肺泡血流狀況,如若發生肺栓塞等情況,血液無法流經肺泡,造成肺泡只有通氣而無血液灌注。針對患者不同的肺內病理、生理特點及氣體交換情況,臨床上會采取不同的機械通氣策略。但是目前臨床上很難對上訴參數進行測量,有時只能通過患者的臨床表現來判斷患者是否存在上述情況,這需要醫生有豐富的臨床經驗。本文介紹的機械通氣模糊邏輯決策系統通過運用氣體交換模型擬合患者的FiO2/SaO2曲線實現了對患者fs和fA2的估算,為臨床醫生提供了切實的參考,具有臨床實用價值。
本文介紹的機械通氣模糊邏輯決策系統是建立在機械通氣專家知識庫基礎上并通過模糊控制器實現的。專家知識庫的建立實際上是對機械通氣臨床指南和使用規則的總結。機械通氣經過幾十年的發展,在臨床上已經總結出了很多操作指南和使用規則,形成了實用完備的專家知識庫體系。本文所建立的專家知識庫則是建立在前人的研究基礎上,并對已建立的復雜計算機幫助系統進行精簡和優化,形成本文適用的專家知識庫。
臨床實踐中,在滿足患者氧需求的前提下應盡量采用低FiO2, 這樣避免長期治療的過程中因為高FiO2可能造成的患者肺泡塌陷,引起吸入性肺不張和氧中毒。所以系統將患者的FiO2合理范圍設定在了<60%的范圍內,從實驗的結果也可以看出在滿足患者機械通氣要求的前提下,系統建議的FiO2普遍低于患者當前的FiO2(如圖 5所示)。
近幾年的研究表明[18-20],采取低潮氣量和高呼氣末正壓(positive end expiratory pressure, PEEP)的肺保護性通氣策略可以有效降低肺機械通氣氣壓傷的概率,增加氧氣的輸送量。但是在臨床實踐中臨床醫生并不能很好地運用這一策略[21]。本文將這一策略應用在決策系統中,將Vt的理想值設定在6 mL/kg(理想體重),這樣經過決策系統得到的決策結果都將遵循這一原則。
過高的F值同樣也會引起過度通氣,增大機械通氣氣壓傷的概率,并且高F值會增加患者的不適,升高患者的呼吸功。所以本文中機械通氣F值的安全范圍設定在了10~25次/min。從實驗結果中可以看出(如圖 7所示),系統所建議的F都在設定的安全范圍內。
針對患者的自身情況系統會采取不同的機械通氣策略。如實驗中針對肺部炎癥、肺內有積液的患者,適當提高吸入氣體的PIP, 增加患者的Vt,有利于減少肺內的積液(如圖 6所示),改善患者通氣/灌注不匹配的情況。
基于模型的機械通氣模糊邏輯決策系統的目標是為臨床呼吸機的使用者提供適合患者自身需求的機械通氣參數設定值,并能夠通過無創的方式模擬仿真患者肺部氣體交換的情況,便于臨床醫生更好地掌握患者的情況,也減少了血氣分析等有創檢查的次數。但是機械通氣是個復雜的過程,涉及到的參數很多,而且各參數間相互關聯。系統為了便于實現,降低過程的復雜性,提高系統的實時性,在機械通氣參數的選擇方面只選取了三個主要的參數,所以系統還不能很好地滿足臨床上使用者的要求。在今后的研究中將盡可能地涵蓋多的機械通氣參數,以便滿足臨床上的使用需求。同時,系統還將在自動閉環控制以及優化人體氣體交換模型方面進行深入研究,實現自動對呼吸機的參數進行控制調節。
4 結論
綜上所述,本研究建立了一個基于人體氣體交換數學模型的機械通氣模糊邏輯決策系統。通過在臨床上的試驗證明,系統可以很好地結合患者的情況為臨床醫生提供治療和機械通氣參數設定方面的幫助和建議。基于模型的機械通氣控制決策系統因為可以模擬患者的氣體交換情況,更好地滿足患者病情的需要,必將成為今后機械通氣自動控制發展的方向,也將會在臨床上得到廣泛的應用。
引言
臨床上將機械通氣作為糾正低血氧癥和高血酸癥的常規手段,在重癥監護治療中起著非常重要的作用。為了適應患者自身多變的情況,機械通氣的參數設定也不盡相同,不正確的機械通氣參數有可能造成患者肺部的損傷,甚至危及生命。
在過去的幾十年中,為了滿足臨床的需求,呼吸機的發展取得了長足的進步,針對患者不同的需求開發出了多種呼吸模式和控制系統[1-6]。這些系統著眼于運用臨床的治療準則和實踐經驗,能夠根據患者的情況自動調節呼吸參數[1-5],達到讓機械通氣的患者呼吸功最小、呼吸最舒暢[5-6],以致最終完成順利脫機的目的。但是這類系統的著眼點比較局限,僅僅以改善患者部分生理參數為目標,不能兼顧患者的整體情況,也不能對患者的狀態做一個預先的判斷。
臨床上任何呼吸機的設定都是以改善患者的氣體交換為目的,醫生希望通過調整呼吸機的參數使得患者的狀態向正常的狀態發展。所以如果患者的病情未能按照醫生的期望發展,醫生就需要根據患者血氣分析的情況重新調整呼吸機的設置或者治療方案。如果能夠針對患者的情況建立呼吸系統的人體模型,就可以模擬患者的氣體交換情況,也可以模擬機械通氣的參數改變對患者的影響。
基于人體生理模型的機械通氣決策系統[7-9]是一項逐漸發展起來的另一類呼吸機輔助控制系統。系統以人體的生理模型為基礎,根據患者的生理參數設定模型的參數,使得模型能夠反映患者的生理狀態。系統根據患者的生理模型以及專家知識庫形成適合患者的機械通氣參數,為臨床醫生的機械通氣策略和參數設定提供參考,或者直接控制呼吸機實施機械通氣。但是因為不同患者呼吸系統的病理和生理情況不一樣,如何準確地模擬患者的真實狀況成了系統實現的難點。
本文介紹了一種基于知識系統和人體模型仿真的決策系統。系統嘗試建立一個人體的呼吸系統模型以真實地模擬不同患者的氣體交換情況,根據患者的呼吸模型,運用臨床治療原則和模糊邏輯的理論,為臨床醫務人員提供適合患者的機械通氣設定參數建議。
1 材料和方法
系統由三部分組成:人機交互模塊、人體仿真模型、模糊控制器,其結構如圖 1所示。系統通過人機交互界面獲得患者的生理參數以及人體仿真模型所需的參數。人體仿真模型根據獲得的參數模擬患者的氣體交換情況。模糊控制器將患者的生理參數作為輸入,與人體仿真模型進行模擬閉環控制,輸出穩定后作為呼吸機設定的參考值反饋到人機交互模塊。下面將分別介紹各模塊功能。
圖1
系統結構圖
Figure1.
Structure of the system
1.1 人體氣體交換模型
1.1.1 人體氣體交換的數學模型
Riley等[10]早期提出肺氣體運輸的簡化模型——單腔肺來模擬生理狀態的肺氣體交換,指出肺氣體運輸的阻力存在于:①肺分流(Shunt):即部分肺泡僅有灌注,無通氣。②由肺泡-肺毛細血管膜造成的氣體由肺泡向肺毛細血管彌散的阻力(Rdiff)。Petros等[11]發現肺通氣、彌散和灌注的不均質性(),提出不均質性的肺模型——雙腔肺,以及肺氣體交換中存在彌散與灌注不匹配。后來Andreassen和Rees等[12-13]提出雙腔肺的氣體運輸模型,利用氧運輸的雙參數數學模型,將肺氣體運輸的阻力描述為肺內分流(fs)和通氣/灌注(fA2)不匹配雙重作用。
Karbing等[14]通過臨床實際對比應用,認為單腔肺模型的模擬值與臨床患者的實際檢測值只有3%吻合,而雙腔肺模型的模擬值與臨床患者的實際檢測值有80%吻合。由此說明雙腔肺模型能更好地模擬患者的實際情況。本文選取雙腔肺模型作為氣體交換模型。
雙腔肺模型是根據人體呼吸生理學和氣體交換平衡方程等推導出來的一系列描述人體內氧氣及二氧化碳交換、運輸、代謝的數學公式,它能夠描述人體呼吸參數的改變對體內氣體交換的影響。模型將人體氣體交換過程劃分為五部分:肺泡通氣、肺泡氣體交換、肺部分流、人體血液運輸、組織氣體交換。每部分所進行的氣體交換描述如下:①人體通過呼吸將肺泡中的氣體與大氣進行交換,提高肺泡中的氧氣含量,降低二氧化碳的含量。②靜脈血通過肺動脈和肺泡毛細血管與肺泡內的氣體進行交換,氧氣通過毛細血管進入血液并發生氧合反應,同時釋放血液中的二氧化碳到肺泡中。氧氣和二氧化碳的交換比率滿足Fick定律[15]。③一部分靜脈血沒有參加氣體交換而是直接與氧合后的動脈血在動脈腔中相混合,這就形成了肺內分流。④動脈血運送至全身,并與人體組織發生氣體交換。氣體交換的量取決于血液中氣體的含量、組織中氧氣代謝量和二氧化碳的產生量。
1.1.2 人體呼吸肺部力學模型
人體呼吸時氣體經過口鼻腔、氣管、支氣管進入肺泡。根據Weibel[16]的研究,將肺部的支氣管樹分為23級,每一級都具有不同的力學特性,其順應性和呼吸阻力也各不相同。由此可以建立起肺部完整的力學數學模型。本文中為了研究方便,采取了簡化的肺部力學模型,將人體的肺看成一個整體,針對這個整體給出一個綜合的肺順應性和呼吸阻力參數。利用這個人體肺力學模型,可以簡單地反映肺呼吸時的潮氣量(Vt)和吸入氣體峰值壓力(peak inspiratory pressure, PIP)的關系。
1.1.3 模型中的參數設定
通過對患者的血氣分析以及應用無創的方法采集到的患者的血氧飽和度(SpO2)、呼末二氧化碳分壓(PetCO2)等生理參數可以獲得模型中參數的值。患者的肺內死腔容積采用患者的標準體重計算獲得(2.2 mL/kg)。
對于fs和fA2可以采用加權最小二乘法進行估算,使得模型能夠最大限度地模擬患者真實的肺部氣體交換情況。還可以根據De Gray等[17]介紹的方法,通過對吸入氧濃度(FiO2)/動脈血氧飽和度(SaO2)曲線的分析,預測fs和fA2的值,使得模型仿真出來的結果與實測數據的擬合曲線最接近。
1.2 模糊控制器
本課題中的模糊控制器是基于呼吸機壓力支持模式下采用模糊控制策略實現對呼吸機參數的設定。控制器設定5個輸入和3個輸出。5個輸入分別是患者SaO2、FiO2、PetCO2、呼吸頻率(RR)和Vt,基本涵蓋了機械通氣中與氣體交換相關的人體生理參數。3個輸出為呼吸機壓力支持模式下的吸入氣體壓力(Pinsp)、FiO2以及機械通氣的頻率(F)。
1.2.1 輸入輸出模糊化
模糊化是將模糊控制器輸入量的確定值轉化為相應模糊語言變量的過程,它是實現模糊控制的一個重要過程。本課題中采用trimf和trapmf兩種隸屬度函數,將輸入劃分為區間結構。SaO2分為2個區間,FiO2分為2個區間,PetCO2分為3個區間,Vt分為3個區間,RR分為3個區間,如圖 2所示。
圖2
輸入模糊化示意圖
Figure2.
Input fuzzy set structure
對于輸出控制量也以區間結構表示。Pinsp、FiO2和F均被分為5個區間,分別為“降低一些”“降低”“維持現狀”“增加”和“增加一些”,如圖 3所示。
圖3
輸出模糊化示意圖
Figure3.
Output fuzzy set structure
1.2.2 模糊控制規則和清晰化計算
模糊控制系統是用一系列基于專家知識的語言來描述表達的,專家知識常采用形如“if…then…”條件語句的形式。用一系列這樣的條件語句描述表達的模糊控制規則就構成了模糊控制規則集合。本課題有5個輸入,基于系統的控制原理和臨床的實踐經驗制定了2×2×3×3×3=108條模糊控制規則,所有規則需滿足以下幾點:
(1)?如果PetCO2升高,則增加F,增大吸入氣體壓力,進而增加分鐘通氣量。
(2)?如果SaO2<85%,并且FiO2>60%,則增大吸入氣體壓力Pinsp,增加潮氣量。
(3)?如果SaO2低,并且FiO2,RR和Pinsp都在正常范圍內,則首先增加F,其次增加FiO2,最后增加Pinsp。
(4)?如果SaO2低,PetCO2低,則升高FiO2,降低Pinsp和F。
(5)?如果Vt高,則降低潮氣量,增加F。
根據以上原則,列舉三條模糊控制規則如下:
①IF SaO2=low and RR=normal and FiO2=high and Vt=normal and PetCO2=normal, THEN Pinsp=increase and F=Maintain and FiO2=Maintain.
②IF SaO2=low and RR=normal and FiO2=high and Vt=normal and PetCO2=low, THEN Pinsp=decrease and F=Maintain and FiO2=increase.
③IF SaO2=low and RR=normal and FiO2=normal and Vt=high and PetCO2=normal, THEN Pinsp=decrease a lot and F=increase and FiO2=increase.
通過模糊推理得到模糊輸出值,這里我們采用加權平均法將模糊輸出集合清晰化,轉化為精確的控制量。
1.3 人機交互模塊
人機交互模塊是臨床醫生與系統進行信息交換的接口。如圖 4所示,左上角的呼吸機設定功能,醫生可以輸入患者當前的機械通氣參數,系統可以仿真出患者最佳的機械通氣設定值,從而為醫生提供參考。右上角的區域,醫生可以輸入患者的血氣分析檢測結果以及患者的心輸出量等患者的相關參數值,系統根據這些參數用于建立和調整該名患者當前的肺部氣體交換模型。左下部分是患者的肺部相關參數,包括肺的順應性、呼吸阻力以及肺的死腔容積。右下部分,系統根據患者當前的肺部氣體交換模型,利用加權最小二乘法估算出患者當前的fs和fA2。同時醫生也可以根據De Gray等[17]介紹的方法,將FiO2從21%至100%取9個值,每次更改吸入氣體氧濃度后5~10 min,采集SaO2或SpO2。所得的數據通過描點法擬合出FiO2/SaO2曲線。系統也可以根據估算的fs和fA2相關值,獲得仿真后的FiO2/SaO2曲線,如果醫生對估算的數值不滿意,還可以手動更改fs和fA2的值,同樣也獲得一條FiO2/SaO2曲線。三條不同參數的FiO2/SaO2曲線可以同時描繪在右下區域的界面中,便于醫生更好地判斷患者的狀況。
圖4
人機交互界面
Figure4.
User-device interface of the decision support system
2 結果
選取在重癥加強護理病房(intensive care unit, ICU)內接受機械通氣的患者10人,7名男性,3名女性, 具體信息如表 1所示。所有患者都患有急性呼吸窘迫綜合征(acute respiratory distress syndrome,ADRS), 需要借助呼吸機進行輔助呼吸。患者的SaO2以及PetCO2是通過床邊監護儀(Drager Infinity Delta XL, Lubeck, Germany)測得。FiO2、RR、Vt、F、肺的順應性和呼吸阻抗等參數是從呼吸機(Drager Evita 4, Lubeck, Germany)上觀察得到。患者的血液相關參數由血氣分析儀(ABL90, Radiometer, Danmark)測得。實驗內容已告知患者及家屬,并通過了相關醫學倫理審查。
根據患者的各項生理參數,系統對10個患者的氣體交換情況進行建模仿真,并通過仿真給出患者當前適宜的機械通氣相關設定參考值(PIP、F、FiO2)。如圖 5所示,是10個患者在系統建議FiO2和當前FiO2條件下測得的患者SaO2對比圖。如圖 6、圖 7所示,是在機械通氣壓力輔助支持(pressure support ventilation, PSV)模式下通過系統模擬仿真后給出呼吸機的PIP以及RR與10個患者當前所接受的機械通氣相關參數的對比圖。
圖5
在系統建議FiO2與當前FiO2條件下測得的患者SaO2對比圖
Figure5.
Comparison of patient's SaO2 with system simulated FiO2 and current FiO2
圖6
系統建議PIP值與當前呼吸機設定PIP值對比圖
Figure6.
Comparison of clinical values of PIP with system simulated PIP
圖7
系統建議機械通氣頻率F值與當前呼吸機設定值F對比圖
Figure7.
Comparison of ventilator's current F with system simulated F
3 討論
本文介紹了一種基于模型的機械通氣模糊邏輯決策系統,系統旨在應用數學建模的方式利用已獲取的患者生理參數對患者肺部的氣體交換情況進行建模仿真,并根據模糊控制系統在已建立的氣體交換模型的基礎上仿真出患者適宜的機械通氣設定參數,以此向臨床的呼吸機使用人員提供參數設定的參考。
與目前廣泛研究的機械通氣自動調節系統相比,基于模型的機械通氣模糊邏輯決策系統具有以下幾個優點:①系統的人體氣體交換數學模型可以很好地模擬仿真患者真實的肺部氣體交換情況;②基于模糊邏輯的控制系統是基于專家知識庫和臨床治療準則和實踐經驗的基礎上制定的模糊控制規則,規則能夠很好地體現臨床的實際要求,控制的安全性、準確性相對較高;③機械通氣參數預先在人體氣體交換模型中進行模擬仿真,可以使獲得的參數更能符合患者自身病情的需要,而且可以對機械通氣參數的改變對患者的影響有個預判;④仿真所得到的機械通氣參數設定的參考值可以在滿足患者自身機械通氣的臨床需求下盡可能地降低氧氣的消耗,降低患者的呼吸功,減小機械通氣對患者肺部造成的機械損傷。
肺內分流、通氣/灌注比、生理死腔容積是反映患者氣體交換狀態的重要參數。肺內分流可以反映患者肺內存在肺泡塌陷的情況,肺泡塌陷使得肺泡無法通氣,流經塌陷肺泡的血液沒有經過氣體交換直接與動脈血混合,降低了動脈血氧分壓,造成患者的低血氧癥。通氣/灌注比則反映患者肺泡通氣和血液灌注的匹配情況,生理死腔容積則反映患者的肺泡血流狀況,如若發生肺栓塞等情況,血液無法流經肺泡,造成肺泡只有通氣而無血液灌注。針對患者不同的肺內病理、生理特點及氣體交換情況,臨床上會采取不同的機械通氣策略。但是目前臨床上很難對上訴參數進行測量,有時只能通過患者的臨床表現來判斷患者是否存在上述情況,這需要醫生有豐富的臨床經驗。本文介紹的機械通氣模糊邏輯決策系統通過運用氣體交換模型擬合患者的FiO2/SaO2曲線實現了對患者fs和fA2的估算,為臨床醫生提供了切實的參考,具有臨床實用價值。
本文介紹的機械通氣模糊邏輯決策系統是建立在機械通氣專家知識庫基礎上并通過模糊控制器實現的。專家知識庫的建立實際上是對機械通氣臨床指南和使用規則的總結。機械通氣經過幾十年的發展,在臨床上已經總結出了很多操作指南和使用規則,形成了實用完備的專家知識庫體系。本文所建立的專家知識庫則是建立在前人的研究基礎上,并對已建立的復雜計算機幫助系統進行精簡和優化,形成本文適用的專家知識庫。
臨床實踐中,在滿足患者氧需求的前提下應盡量采用低FiO2, 這樣避免長期治療的過程中因為高FiO2可能造成的患者肺泡塌陷,引起吸入性肺不張和氧中毒。所以系統將患者的FiO2合理范圍設定在了<60%的范圍內,從實驗的結果也可以看出在滿足患者機械通氣要求的前提下,系統建議的FiO2普遍低于患者當前的FiO2(如圖 5所示)。
近幾年的研究表明[18-20],采取低潮氣量和高呼氣末正壓(positive end expiratory pressure, PEEP)的肺保護性通氣策略可以有效降低肺機械通氣氣壓傷的概率,增加氧氣的輸送量。但是在臨床實踐中臨床醫生并不能很好地運用這一策略[21]。本文將這一策略應用在決策系統中,將Vt的理想值設定在6 mL/kg(理想體重),這樣經過決策系統得到的決策結果都將遵循這一原則。
過高的F值同樣也會引起過度通氣,增大機械通氣氣壓傷的概率,并且高F值會增加患者的不適,升高患者的呼吸功。所以本文中機械通氣F值的安全范圍設定在了10~25次/min。從實驗結果中可以看出(如圖 7所示),系統所建議的F都在設定的安全范圍內。
針對患者的自身情況系統會采取不同的機械通氣策略。如實驗中針對肺部炎癥、肺內有積液的患者,適當提高吸入氣體的PIP, 增加患者的Vt,有利于減少肺內的積液(如圖 6所示),改善患者通氣/灌注不匹配的情況。
基于模型的機械通氣模糊邏輯決策系統的目標是為臨床呼吸機的使用者提供適合患者自身需求的機械通氣參數設定值,并能夠通過無創的方式模擬仿真患者肺部氣體交換的情況,便于臨床醫生更好地掌握患者的情況,也減少了血氣分析等有創檢查的次數。但是機械通氣是個復雜的過程,涉及到的參數很多,而且各參數間相互關聯。系統為了便于實現,降低過程的復雜性,提高系統的實時性,在機械通氣參數的選擇方面只選取了三個主要的參數,所以系統還不能很好地滿足臨床上使用者的要求。在今后的研究中將盡可能地涵蓋多的機械通氣參數,以便滿足臨床上的使用需求。同時,系統還將在自動閉環控制以及優化人體氣體交換模型方面進行深入研究,實現自動對呼吸機的參數進行控制調節。
4 結論
綜上所述,本研究建立了一個基于人體氣體交換數學模型的機械通氣模糊邏輯決策系統。通過在臨床上的試驗證明,系統可以很好地結合患者的情況為臨床醫生提供治療和機械通氣參數設定方面的幫助和建議。基于模型的機械通氣控制決策系統因為可以模擬患者的氣體交換情況,更好地滿足患者病情的需要,必將成為今后機械通氣自動控制發展的方向,也將會在臨床上得到廣泛的應用。