本文目的是研究約束復合踝關節內(外)翻和旋內(外)運動對人體步態穩定性的影響。試驗在水平濕滑試驗臺上進行,對比了約束復合踝關節內(外)翻和旋內(外)運動(FIXED)以及無束縛(FREE)兩種狀態,分析了時-空步態參數、運動學參數、動力學參數以及利用摩擦系數(UCOF)。試驗結果表明FIXED可能會導致步速和跨步長顯著增大,雙支撐期顯著縮短。同時,FIXED可影響膝關節和踝關節的關節角度在矢狀面內的運動幅度。另外,約束后利用摩擦系數顯著增大,這反映了滑跌概率的增大以及步態穩定性的減弱。因此,在助行器、雙足機器人或者假肢設計中,應該進行結構設計以實現復合踝關節內(外)翻及旋內(外)運動。
引用本文: 李洋, 張峻霞, 蘇海龍, 王新亭, 張琰. 約束復合踝關節運動對人體步態穩定性的影響. 生物醫學工程學雜志, 2016, 33(5): 867-872. doi: 10.7507/1001-5515.20160140 復制
版權信息: ?四川大學華西醫院華西期刊社《生物醫學工程學雜志》版權所有,未經授權不得轉載、改編
引言
目前,國內外助行器結構設計對于踝結構大都只考慮矢狀面內屈伸自由度,而將冠狀面內的內(外)翻及水平面內的旋內(外)兩個自由度忽略不計[1-4]。有研究表明,足踝的過度簡化有可能會影響機器人行走規劃和地面反力之間的協調,使得反饋補償偏大,影響行走步態和穩定性[5-6]。
人體的踝部結構對步態平穩順暢有著重要的作用。足部運動時踝關節、距下關節、距跟舟關節聯合活動,故將這三個關節合稱為復合踝關節。正常行走時,從足跟觸地到全足著地,距下關節外翻,足旋前,使前足靈活順應不規則路面;在支撐期和蹬離期,距下關節內翻,足旋后,足部成為一個堅固的結構,將身體向前推進[7]。復合踝關節在正常步態中起著關鍵作用,傳遞下肢和足間的力,密切影響足與地面間力的方向[8],有助于推進、減震和步態平衡等[9]。復合踝關節屈伸、內(外)翻和旋內(外)的三種運動對步態都非常重要。缺少或限制踝關節的內(外)翻和旋內(外)運動對人體步態可能會有嚴重影響,造成步態特征的改變和步態穩定性的失衡。
因此,本研究從試驗角度出發,以加強的醫用踝關節固定帶限制受試者復合踝關節內(外)翻和旋內(外)運動,通過對比約束前后各項步態參數的變化,量化得出復合踝關節內(外)翻和旋內(外)運動對行走步態穩定性的影響。考慮到人體足踝結構的復雜程度以及試驗為體外約束限制受試者關節運動,現階段尚無法精確控制單一關節運動。所以,試驗將人體足踝部關節當作整體進行研究,討論復合踝關節整體的屈伸、內(外)翻、旋內(外)運動,進而為假肢、動力式助行器以及類人型雙足機器人踝部結構設計提供理論基礎。
1 試驗方法
1.1 試驗對象
受試對象為10名男性,年齡(25.5±1.38)歲,身高(1.74±0.04) m,體重(65.33±3.67) kg,均身體健康,無上下肢神經及肌肉骨骼病史,且行走步態無異常。受試者了解試驗目的及整個試驗過程, 試驗在征得受試者同意后進行。
1.2 試驗設備
試驗數據采集裝置包括:頻率100 Hz配有10個MX紅外攝像機的Vicon三維光學運動捕捉系統(VICON Motion Systems, Oxford, UK),頻率1 000 Hz的AMTI-BP100600型生物力學測力臺(AMTI, Watertown, US)兩塊。
試驗在室內5 m×1 m的步態行走試驗臺上完成。測力臺嵌入行走試驗臺內部,并保證臺面之間平齊。試驗臺上方設有人工控制的隨行安全保護裝置,在不干涉受試人員行走速度的同時,隨受試人員同行,隨時保護受試人員,避免滑跌造成傷害。
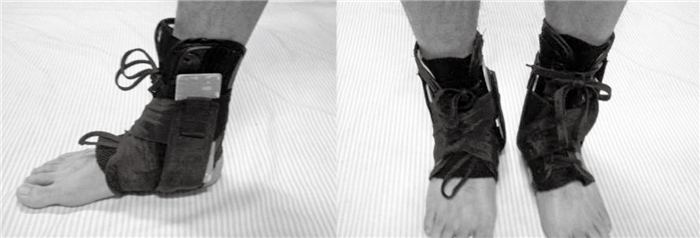
如圖 1所示,試驗使用木板加強的醫用踝關節固定帶對復合踝關節運動進行約束。醫用踝關節固定帶是一種輕便型的足踝保護器,通過護踝兩側的韌性塑料板限制腳踝內、外側不穩定的橫向運動,控制足踝內(外)翻和旋內(外);同時這種護踝裝置不會妨礙踝關節正常的背屈和跖屈運動。試驗中,用18.0 cm×7.5 cm×0.3 cm的圓角厚木板綁縛雙足腳踝內、外兩側,加強醫用踝關節固定帶踝關節兩側的強度,以增強對雙足復合踝關節的內(外)翻和旋內(外)運動的限制。
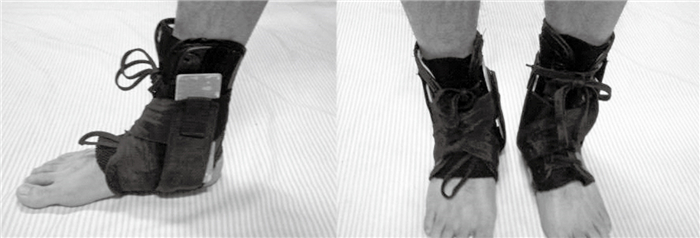 圖1
復合踝關節約束方式
Figure1.
Restriction method of the ankle joint complex
圖1
復合踝關節約束方式
Figure1.
Restriction method of the ankle joint complex
1.3 試驗過程
10位受試者分別在約束雙足復合踝關節內(外)翻和旋內(外)運動(FIXED)和赤足無束縛(FREE)兩種狀態下,各完成10次行走試驗。考慮到濕滑路面更容易引起失穩或滑跌,能更好地體現人自身平衡調節機制,更明顯地體現出復合踝關節在人體行走穩定性中的作用,因此,試驗選擇在濕滑水平臺面上進行,介質為植物油。
試驗中,受試者身著試驗專用服裝和安全帶,下肢貼16個標志點,包括:骨盆4個,髂前上棘、髂后上棘,左、右各1個;下肢12個,包括膝關節、大腿、小腿、踝關節、腳趾、足跟,左、右各1個。此外,左側大、小腿上的點低于右側,以便后期分析時能清楚區分左、右腿[10]。
試驗開始前,要求受試者以自然步速在試驗臺上行走數次,以熟悉行走環境。試驗開始,受試者以自然步速行走,要求進入數據采集區域前后各行走三步以上,以保證采集數據為正常行走中段數據而不是起步或終止階段步態。每次試驗間進行適當休息,避免疲勞對步態的影響。
1.4 數據分析
時-空步態參數和運動學參數利用光學運動捕捉系統采集,主要包括:步速,跨步長,單、雙支撐期和下肢髖、膝、踝各關節的關節角。以一側足跟著地為始到同側足再次足跟著地為止為一個完整周期,對應于步態周期的0%~100%時刻。動力學參數利用生物力學測力臺采集,主要分析地面的反作用力(ground reaction force,GRF)。對單足支撐相進行時間標準化,以足跟著地到同側足趾離地對應支撐相的0%~100%時刻,并根據受試者體重對GRF進行標準化。采用配對樣本t檢驗對FIXED與FREE的數據進行分析。顯著性水平α=0.05。數據處理通過SPSS20.0軟件完成。分析數值采用均值±標準差形式。
2 試驗結果
2.1 時-空步態參數
如表 1所示,對比FIXED和FREE兩種狀態下的時-空步態參數,可知在濕滑水平地面行走時,FIXED狀態下的步速(P<0.05)和跨步長(P<0.05)明顯增大,雙支撐期(P<0.05)明顯減小。這說明,約束后受試者行走中主動縮短了雙足同時與地面接觸的時間,以適應踝關節運動受束縛帶來的步態變化。
2.2 運動學參數
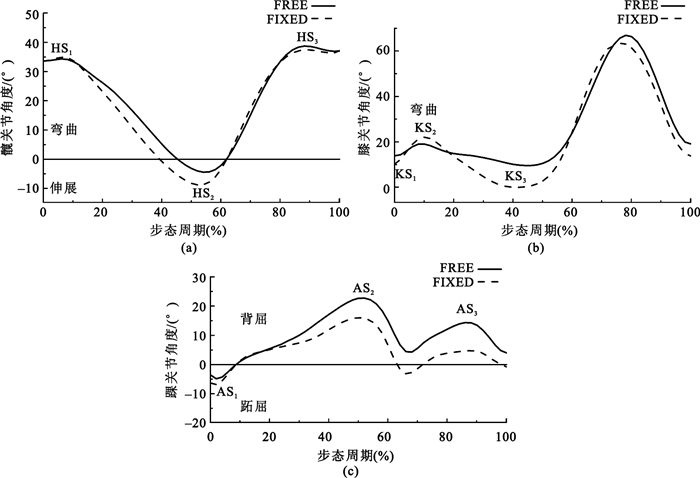
如圖 2所示,一個完整步態周期內,FIXED和FREE狀態行走時矢狀面內髖、膝、踝關節的關節角度均值曲線在變化趨勢上基本一致,但關節角度幅值有所變化。如表 2所示,針對關鍵時刻點的關節角度變化進行對比分析,圖 2中標示了相應點的位置。與FREE狀態比較,FIXED狀態下,足跟著地時刻點膝關節彎曲角度KS1明顯減小(P<0.05),踝關節跖曲角度AS1明顯增大(P<0.05)。步態周期20%~100%內,踝關節背屈角度明顯減小(AS2、AS3,P<0.05)。步態周期40%~60%內,髖關節和膝關節曲線出現明顯的幅度差異(HS2、KS3,P<0.05)。整個周期內,膝關節關節角度變化范圍明顯增大(KS4,P<0.05),踝關節關節角度變化范圍明顯減小(AS4,P<0.05)。這表明FIXED下行走時,矢狀面內髖、膝、踝關節關節角度均值發生一定變化,這可能是為了緩解復合踝運動受限對正常步態帶來的影響。
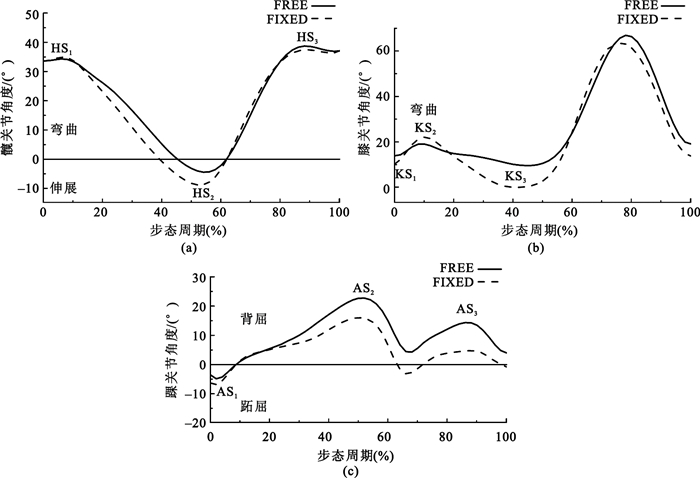 圖2
髖、膝、踝關節矢狀面角度均值變化曲線
圖2
髖、膝、踝關節矢狀面角度均值變化曲線
(a)髖關節;(b)膝關節;(c)踝關節
Figure2. Ensemble average of hip, knee, and ankle joint angles in the sagittal plane(a) hip joint; (b) knee joint; (c) ankle joint
2.3 動力學參數
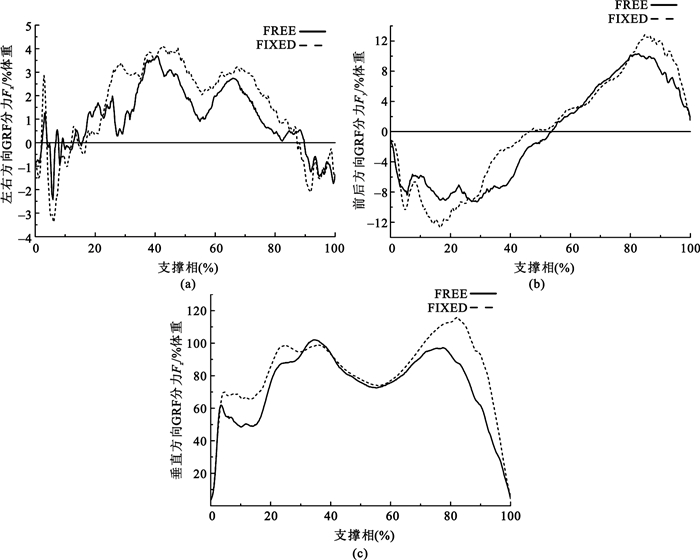
如圖 3(a)、(b)、(c)所示,分別反映了GRF在一個支撐相內左右方向分力Fx、前后方向分力Fy和垂直方向分力Fz均值的變化情況。整個步態周期內FIXED和FREE變化趨勢基本一致,但幅值絕對值增大。
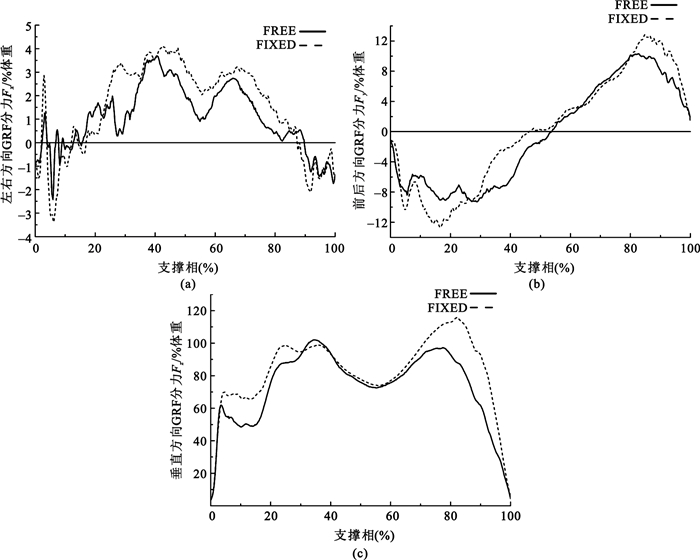 圖3
地面的反作用力均值曲線
圖3
地面的反作用力均值曲線
(a)左右方向分力
(a) medial-lateral force
2.4 利用摩擦系數
可得摩擦系數(available coefficient of friction,ACOF)是保證鞋與地之間不發生滑動的最大摩擦力系數。利用摩擦系數(utilized coefficient of friction,UCOF)是保證在有污染介質地面上安全行走的摩擦力系數,是GRF的水平合力與垂直力的最大比值[11]。根據受試者每次試驗測得的GRF,利用公式(1)計算UCOF。由于腳跟著地初期GRF垂直方向分力較小,會導致出現一個不合理的UCOF極大值,應予以舍棄。
| $ {\rm{UCOF = }}{\left( {\frac{{\sqrt {F_x^2 + F_y^2} }}{{{F_x}}}} \right)_{\max }} $ |
FREE時UCOF為0.167±0.045,FIXED時UCOF為0.206±0.034,后者約為前者的1.23倍,顯著增大(P=0.001)。
3 討論
如表 1所示,結果表明FIXED狀態下步速和跨步長均明顯增大,同時雙支撐期明顯縮短。雙支撐期是人體步態周期中最穩定的一個階段,它的縮短預示著FIXED狀態可能會增大步態的不穩定性。
圖 2和表 2對比了FIXED和FREE狀態下行走在矢狀面內關節角度的變化,總體上可以看出踝關節和膝關節的關節角度變化較明顯。這可能是為了緩解復合踝關節運動受限,人體所啟動代償機制的反映。正常行走時,從足跟觸地到全足著地,距下關節外翻,足旋前,使前足靈活順應不規則路面[7]。FIXED狀態下,距下關節外翻受限,無法完美實現足旋前運動,達到適應路面的目的,這勢必增大了足落地時的不穩定性。為緩解這種情況,人體啟動代償機制,在足跟觸地時刻增大踝關節跖曲角度(AS1,P<0.05),從而增大足跟著地時刻的足-地接觸面積,以此提高著地時的穩定性。正常行走時,在支撐相末期,距下關節內翻,足旋后,足部成為一個堅固的結構,將身體向前推進。距下關節在步態中通過自身的旋轉雙向傳遞脛骨的內旋、外旋和足的外翻、內翻[7],從而實現力的傳遞和下肢的運動。FIXED狀態下,距下關節冠狀面和水平面內的運動受限,影響了傳遞作用的實現,使足趾離地的蹬地力不足。為了補償這種情況,髖關節伸展角度明顯增大(HS2,P<0.05),以加速完成身體重心的前移,膝關節彎曲角度減小,加大腿部的伸展趨勢,以幫助提供蹬地力。另外,試驗發現復合踝關節內(外)翻、旋內(外)運動受限可能影響其屈伸運動的范圍,使矢狀面內踝關節的運動范圍明顯減小(AS4,P<0.05)。
根據項目組前期已經得出的滑跌判據[12]:當ACOF<UCOF<3.414*ACOF時,發生滑動;當UCOF≥3.414*ACOF時,滑動持續并導致滑跌。由于ACOF只受鞋底材質與地面材質以及污染介質的影響[11-13],故行走條件相同時ACOF值也相同。同樣地面環境條件下,ACOF一定,UCOF越大,滑跌發生概率越大,行走穩定性越弱[13-15]。因此,UCOF的值就直接反映了滑跌概率的大小,也就反映了行走穩定性的強弱。相較于FREE狀態,FIXED狀態下UCOF均值增大了23%,即滑跌概率顯著增大(P<0.05)。這也印證了雙支撐期的縮短對步態失穩概率增大的預示。
本研究還存在一定不足之處,由于體外約束的局限性,試驗無法完全限制復合踝關節冠狀面內的內(外)翻運動及水平面內的旋內(外)運動。同時,這些運動受約束可能在一定程度上影響踝關節在矢狀面內的運動范圍。因此,試驗只是探究復合踝關節的這兩種運動受到一定程度約束對人體步態穩定性的影響。后期,研究將針對約束的有效性以及對其他運動的干擾進行優化設計,進一步完善研究,提升研究的可靠性和深度。
4 結論
水平濕滑地面行走,復合踝關節冠狀面內的內(外)翻運動及水平面內的旋內(外)運動受限可能會導致人體行走步速和跨步長顯著增大,以及雙支撐期顯著縮短。為適應這種變化人體下肢啟動代償機制,緩解約束引起的足跟著地時刻的不穩定和足趾離地時的蹬地力不足的情況。試驗數據顯示這種代償機制分別主要由踝關節和膝關節提供。同時,約束后UCOF的顯著增大反映了滑跌概率的增大,步態穩定性的減弱。因此,為保證使用的安全性,提高設備行走穩定性,在設計助行器、雙足機器人或假肢的足踝部結構時,應該考慮復合踝關節對行走步態及穩定性的影響,對復合踝關節冠狀面內的內(外)翻自由度及水平面內的旋內(外)自由度進行相應的結構設計。
引言
目前,國內外助行器結構設計對于踝結構大都只考慮矢狀面內屈伸自由度,而將冠狀面內的內(外)翻及水平面內的旋內(外)兩個自由度忽略不計[1-4]。有研究表明,足踝的過度簡化有可能會影響機器人行走規劃和地面反力之間的協調,使得反饋補償偏大,影響行走步態和穩定性[5-6]。
人體的踝部結構對步態平穩順暢有著重要的作用。足部運動時踝關節、距下關節、距跟舟關節聯合活動,故將這三個關節合稱為復合踝關節。正常行走時,從足跟觸地到全足著地,距下關節外翻,足旋前,使前足靈活順應不規則路面;在支撐期和蹬離期,距下關節內翻,足旋后,足部成為一個堅固的結構,將身體向前推進[7]。復合踝關節在正常步態中起著關鍵作用,傳遞下肢和足間的力,密切影響足與地面間力的方向[8],有助于推進、減震和步態平衡等[9]。復合踝關節屈伸、內(外)翻和旋內(外)的三種運動對步態都非常重要。缺少或限制踝關節的內(外)翻和旋內(外)運動對人體步態可能會有嚴重影響,造成步態特征的改變和步態穩定性的失衡。
因此,本研究從試驗角度出發,以加強的醫用踝關節固定帶限制受試者復合踝關節內(外)翻和旋內(外)運動,通過對比約束前后各項步態參數的變化,量化得出復合踝關節內(外)翻和旋內(外)運動對行走步態穩定性的影響。考慮到人體足踝結構的復雜程度以及試驗為體外約束限制受試者關節運動,現階段尚無法精確控制單一關節運動。所以,試驗將人體足踝部關節當作整體進行研究,討論復合踝關節整體的屈伸、內(外)翻、旋內(外)運動,進而為假肢、動力式助行器以及類人型雙足機器人踝部結構設計提供理論基礎。
1 試驗方法
1.1 試驗對象
受試對象為10名男性,年齡(25.5±1.38)歲,身高(1.74±0.04) m,體重(65.33±3.67) kg,均身體健康,無上下肢神經及肌肉骨骼病史,且行走步態無異常。受試者了解試驗目的及整個試驗過程, 試驗在征得受試者同意后進行。
1.2 試驗設備
試驗數據采集裝置包括:頻率100 Hz配有10個MX紅外攝像機的Vicon三維光學運動捕捉系統(VICON Motion Systems, Oxford, UK),頻率1 000 Hz的AMTI-BP100600型生物力學測力臺(AMTI, Watertown, US)兩塊。
試驗在室內5 m×1 m的步態行走試驗臺上完成。測力臺嵌入行走試驗臺內部,并保證臺面之間平齊。試驗臺上方設有人工控制的隨行安全保護裝置,在不干涉受試人員行走速度的同時,隨受試人員同行,隨時保護受試人員,避免滑跌造成傷害。
如圖 1所示,試驗使用木板加強的醫用踝關節固定帶對復合踝關節運動進行約束。醫用踝關節固定帶是一種輕便型的足踝保護器,通過護踝兩側的韌性塑料板限制腳踝內、外側不穩定的橫向運動,控制足踝內(外)翻和旋內(外);同時這種護踝裝置不會妨礙踝關節正常的背屈和跖屈運動。試驗中,用18.0 cm×7.5 cm×0.3 cm的圓角厚木板綁縛雙足腳踝內、外兩側,加強醫用踝關節固定帶踝關節兩側的強度,以增強對雙足復合踝關節的內(外)翻和旋內(外)運動的限制。
圖1
復合踝關節約束方式
Figure1.
Restriction method of the ankle joint complex
1.3 試驗過程
10位受試者分別在約束雙足復合踝關節內(外)翻和旋內(外)運動(FIXED)和赤足無束縛(FREE)兩種狀態下,各完成10次行走試驗。考慮到濕滑路面更容易引起失穩或滑跌,能更好地體現人自身平衡調節機制,更明顯地體現出復合踝關節在人體行走穩定性中的作用,因此,試驗選擇在濕滑水平臺面上進行,介質為植物油。
試驗中,受試者身著試驗專用服裝和安全帶,下肢貼16個標志點,包括:骨盆4個,髂前上棘、髂后上棘,左、右各1個;下肢12個,包括膝關節、大腿、小腿、踝關節、腳趾、足跟,左、右各1個。此外,左側大、小腿上的點低于右側,以便后期分析時能清楚區分左、右腿[10]。
試驗開始前,要求受試者以自然步速在試驗臺上行走數次,以熟悉行走環境。試驗開始,受試者以自然步速行走,要求進入數據采集區域前后各行走三步以上,以保證采集數據為正常行走中段數據而不是起步或終止階段步態。每次試驗間進行適當休息,避免疲勞對步態的影響。
1.4 數據分析
時-空步態參數和運動學參數利用光學運動捕捉系統采集,主要包括:步速,跨步長,單、雙支撐期和下肢髖、膝、踝各關節的關節角。以一側足跟著地為始到同側足再次足跟著地為止為一個完整周期,對應于步態周期的0%~100%時刻。動力學參數利用生物力學測力臺采集,主要分析地面的反作用力(ground reaction force,GRF)。對單足支撐相進行時間標準化,以足跟著地到同側足趾離地對應支撐相的0%~100%時刻,并根據受試者體重對GRF進行標準化。采用配對樣本t檢驗對FIXED與FREE的數據進行分析。顯著性水平α=0.05。數據處理通過SPSS20.0軟件完成。分析數值采用均值±標準差形式。
2 試驗結果
2.1 時-空步態參數
如表 1所示,對比FIXED和FREE兩種狀態下的時-空步態參數,可知在濕滑水平地面行走時,FIXED狀態下的步速(P<0.05)和跨步長(P<0.05)明顯增大,雙支撐期(P<0.05)明顯減小。這說明,約束后受試者行走中主動縮短了雙足同時與地面接觸的時間,以適應踝關節運動受束縛帶來的步態變化。
2.2 運動學參數
如圖 2所示,一個完整步態周期內,FIXED和FREE狀態行走時矢狀面內髖、膝、踝關節的關節角度均值曲線在變化趨勢上基本一致,但關節角度幅值有所變化。如表 2所示,針對關鍵時刻點的關節角度變化進行對比分析,圖 2中標示了相應點的位置。與FREE狀態比較,FIXED狀態下,足跟著地時刻點膝關節彎曲角度KS1明顯減小(P<0.05),踝關節跖曲角度AS1明顯增大(P<0.05)。步態周期20%~100%內,踝關節背屈角度明顯減小(AS2、AS3,P<0.05)。步態周期40%~60%內,髖關節和膝關節曲線出現明顯的幅度差異(HS2、KS3,P<0.05)。整個周期內,膝關節關節角度變化范圍明顯增大(KS4,P<0.05),踝關節關節角度變化范圍明顯減小(AS4,P<0.05)。這表明FIXED下行走時,矢狀面內髖、膝、踝關節關節角度均值發生一定變化,這可能是為了緩解復合踝運動受限對正常步態帶來的影響。
圖2
髖、膝、踝關節矢狀面角度均值變化曲線
(a)髖關節;(b)膝關節;(c)踝關節
Figure2. Ensemble average of hip, knee, and ankle joint angles in the sagittal plane(a) hip joint; (b) knee joint; (c) ankle joint
2.3 動力學參數
如圖 3(a)、(b)、(c)所示,分別反映了GRF在一個支撐相內左右方向分力Fx、前后方向分力Fy和垂直方向分力Fz均值的變化情況。整個步態周期內FIXED和FREE變化趨勢基本一致,但幅值絕對值增大。
圖3
地面的反作用力均值曲線
(a)左右方向分力
(a) medial-lateral force
2.4 利用摩擦系數
可得摩擦系數(available coefficient of friction,ACOF)是保證鞋與地之間不發生滑動的最大摩擦力系數。利用摩擦系數(utilized coefficient of friction,UCOF)是保證在有污染介質地面上安全行走的摩擦力系數,是GRF的水平合力與垂直力的最大比值[11]。根據受試者每次試驗測得的GRF,利用公式(1)計算UCOF。由于腳跟著地初期GRF垂直方向分力較小,會導致出現一個不合理的UCOF極大值,應予以舍棄。
| $ {\rm{UCOF = }}{\left( {\frac{{\sqrt {F_x^2 + F_y^2} }}{{{F_x}}}} \right)_{\max }} $ |
FREE時UCOF為0.167±0.045,FIXED時UCOF為0.206±0.034,后者約為前者的1.23倍,顯著增大(P=0.001)。
3 討論
如表 1所示,結果表明FIXED狀態下步速和跨步長均明顯增大,同時雙支撐期明顯縮短。雙支撐期是人體步態周期中最穩定的一個階段,它的縮短預示著FIXED狀態可能會增大步態的不穩定性。
圖 2和表 2對比了FIXED和FREE狀態下行走在矢狀面內關節角度的變化,總體上可以看出踝關節和膝關節的關節角度變化較明顯。這可能是為了緩解復合踝關節運動受限,人體所啟動代償機制的反映。正常行走時,從足跟觸地到全足著地,距下關節外翻,足旋前,使前足靈活順應不規則路面[7]。FIXED狀態下,距下關節外翻受限,無法完美實現足旋前運動,達到適應路面的目的,這勢必增大了足落地時的不穩定性。為緩解這種情況,人體啟動代償機制,在足跟觸地時刻增大踝關節跖曲角度(AS1,P<0.05),從而增大足跟著地時刻的足-地接觸面積,以此提高著地時的穩定性。正常行走時,在支撐相末期,距下關節內翻,足旋后,足部成為一個堅固的結構,將身體向前推進。距下關節在步態中通過自身的旋轉雙向傳遞脛骨的內旋、外旋和足的外翻、內翻[7],從而實現力的傳遞和下肢的運動。FIXED狀態下,距下關節冠狀面和水平面內的運動受限,影響了傳遞作用的實現,使足趾離地的蹬地力不足。為了補償這種情況,髖關節伸展角度明顯增大(HS2,P<0.05),以加速完成身體重心的前移,膝關節彎曲角度減小,加大腿部的伸展趨勢,以幫助提供蹬地力。另外,試驗發現復合踝關節內(外)翻、旋內(外)運動受限可能影響其屈伸運動的范圍,使矢狀面內踝關節的運動范圍明顯減小(AS4,P<0.05)。
根據項目組前期已經得出的滑跌判據[12]:當ACOF<UCOF<3.414*ACOF時,發生滑動;當UCOF≥3.414*ACOF時,滑動持續并導致滑跌。由于ACOF只受鞋底材質與地面材質以及污染介質的影響[11-13],故行走條件相同時ACOF值也相同。同樣地面環境條件下,ACOF一定,UCOF越大,滑跌發生概率越大,行走穩定性越弱[13-15]。因此,UCOF的值就直接反映了滑跌概率的大小,也就反映了行走穩定性的強弱。相較于FREE狀態,FIXED狀態下UCOF均值增大了23%,即滑跌概率顯著增大(P<0.05)。這也印證了雙支撐期的縮短對步態失穩概率增大的預示。
本研究還存在一定不足之處,由于體外約束的局限性,試驗無法完全限制復合踝關節冠狀面內的內(外)翻運動及水平面內的旋內(外)運動。同時,這些運動受約束可能在一定程度上影響踝關節在矢狀面內的運動范圍。因此,試驗只是探究復合踝關節的這兩種運動受到一定程度約束對人體步態穩定性的影響。后期,研究將針對約束的有效性以及對其他運動的干擾進行優化設計,進一步完善研究,提升研究的可靠性和深度。
4 結論
水平濕滑地面行走,復合踝關節冠狀面內的內(外)翻運動及水平面內的旋內(外)運動受限可能會導致人體行走步速和跨步長顯著增大,以及雙支撐期顯著縮短。為適應這種變化人體下肢啟動代償機制,緩解約束引起的足跟著地時刻的不穩定和足趾離地時的蹬地力不足的情況。試驗數據顯示這種代償機制分別主要由踝關節和膝關節提供。同時,約束后UCOF的顯著增大反映了滑跌概率的增大,步態穩定性的減弱。因此,為保證使用的安全性,提高設備行走穩定性,在設計助行器、雙足機器人或假肢的足踝部結構時,應該考慮復合踝關節對行走步態及穩定性的影響,對復合踝關節冠狀面內的內(外)翻自由度及水平面內的旋內(外)自由度進行相應的結構設計。