


本文旨在建立適用于步態動力學仿真分析的足部分塊模型并驗證其有效性及實用性。本文基于新型的混合驅動人體步態試驗機,將骨骼模型導入機械系統動力學自動分析軟件(ADAMS)中,結合在其中建立的足部韌帶、筋膜、肌肉模型及柔性體足底軟組織模型,組成足部分塊模型。用在體試驗采集到的步態數據作為驅動,并在模型上加載肌肉力和肌腱力,進行步態模擬。將得到的地面反作用力及關節旋轉角度與報道結果進行比較,驗證了模型的有效性。本文仿真結果表明,本模型能較好地用于步態動力學仿真分析,并有望作為進一步研究的工具。
引用本文: 胡杰, 王冬梅, 楊文婷, 郭秦陽, 施光林. 基于機械系統動力學自動分析的步態仿真足部分塊模型. 生物醫學工程學雜志, 2016, 33(6): 1060-1066. doi: 10.7507/1001-5515.20160170 復制
版權信息: ?四川大學華西醫院華西期刊社《生物醫學工程學雜志》版權所有,未經授權不得轉載、改編
引言
傳統的在體步態分析對于了解足部疾病病理、優化康復治療方案具有重要意義[1-2]。在體步態分析中,一些參數比如步幅、步頻、足偏角、地面反作用力以及關節力矩等易于直接測得或者通過反向動力學的方法計算得到[3-4]。但是,另一些數據比如各個骨塊之間的相對位移、參與調整步態的肌肉力的大小等均無法直接得到[5-6]。通過向在體骨骼打鋼針的運動學和動力學試驗研究可以得到各個骨塊的相對運動情況,但是一般在體試驗會對受試者造成創傷,因而很難找到志愿者,即使有志愿者,也無法測得肌肉力[7-8]。因此,通過建立仿真模型模擬真實情況以獲得有參考價值的數據已逐漸成為此類研究的重要手段。最近的一些步態仿真實驗中用到的模型主要分三類:一類用規則的幾何模型來代替骨骼模型[9-10];另一類是有限元模型[11-13];第三類是尸體足踝步態模擬模型[14-15]。其中,規則的幾何模型可以對步態進行宏觀研究,而骨骼和骨骼之間、骨骼和肌肉之間的相互作用并不能在模型上得到反映;有限元可以得到步態過程中骨骼上的應力分布,但是大部分僅僅局限于步態中的幾個姿態,而不能很好地模擬整個步態;尸體模型的運動特性和在體存在差異,且新鮮尸體足樣本難以獲得。因此,一個精細且能用于動態步態仿真的足踝模型已成為足踝運動學和動力學特性研究的必要工具。
目前,Aubin等[16]研制的六自由度步態仿真機能夠很好地控制脛骨的運動,但是由于機器的局限性以及尸體足強度比常人足強度小等原因,無法完全按照實際情況加載脛骨力,在實驗中縮小了脛骨加載力。前期,本課題組自行研發了混合驅動型人體步態試驗機(專利號:CN104504984A)[17],旨在完全按照實際情況進行人體步態試驗及相關研究。當前,機械系統動力學自動分析軟件 (automatic dynamic analysis of mechanical systems,ADAMS)在多剛體運動學分析中有著廣泛的應用。其有著建模方便、運動關系定義快捷、可以與其他工程軟件實現交互等優勢;且軟件集合了模擬繩索、柔性體的模塊,能夠用于建立足部的肌肉、足底軟組織等模型。為此,本文的研究在ADAMS中建立足踝分塊模型,結合步態試驗機的三維模型,運用在體試驗測得的步態數據來驅動仿真,模擬真實的步態,對比分析足踝步態中各運動模塊之間的運動關系,以驗證模型的有效性,為試驗機的驅動控制提供基礎數據,為深入研究步態中韌帶、肌肉及足底軟組織的生物力學特性和臨床疾病治療的機制研究提供數值仿真分析平臺。
1 材料與方法
1.1 六自由度平臺建模
本文用到的混合驅動人體步態試驗機的核心部分是六自由度平臺。如圖 1所示。整個系統的全局坐標系定義如圖 1左下角所示。各個零部件的局部坐標系和全局坐標系的方向相同,位于各自的重心處。足部解剖學中的矢狀面、額狀面及水平面分別對應全局坐標系中的XY平面、YZ平面、XZ平面。由于步態中足部在矢狀面內位移較大,我們在機架上加入滑軌機構,使得整個平臺能在矢狀面內移動,增大移動范圍。因此,平臺和支撐框架之間用移動副連接,只有一個移動自由度。移動六自由度平臺中,六根電動缸和各自的伸縮桿之間用圓柱副連接,均存在一個移動自由度和一個轉動自由度,平臺內部沒有相對運動的部件之間用固定副連接,限制所有自由度。另外,在平臺下方置有測力板,和支承框架之間采用固定副連接,能實現步態中足部與地面三個方向的反力測量。同時,將足踝模型的脛骨部分和移動六自由度平臺固定連接。
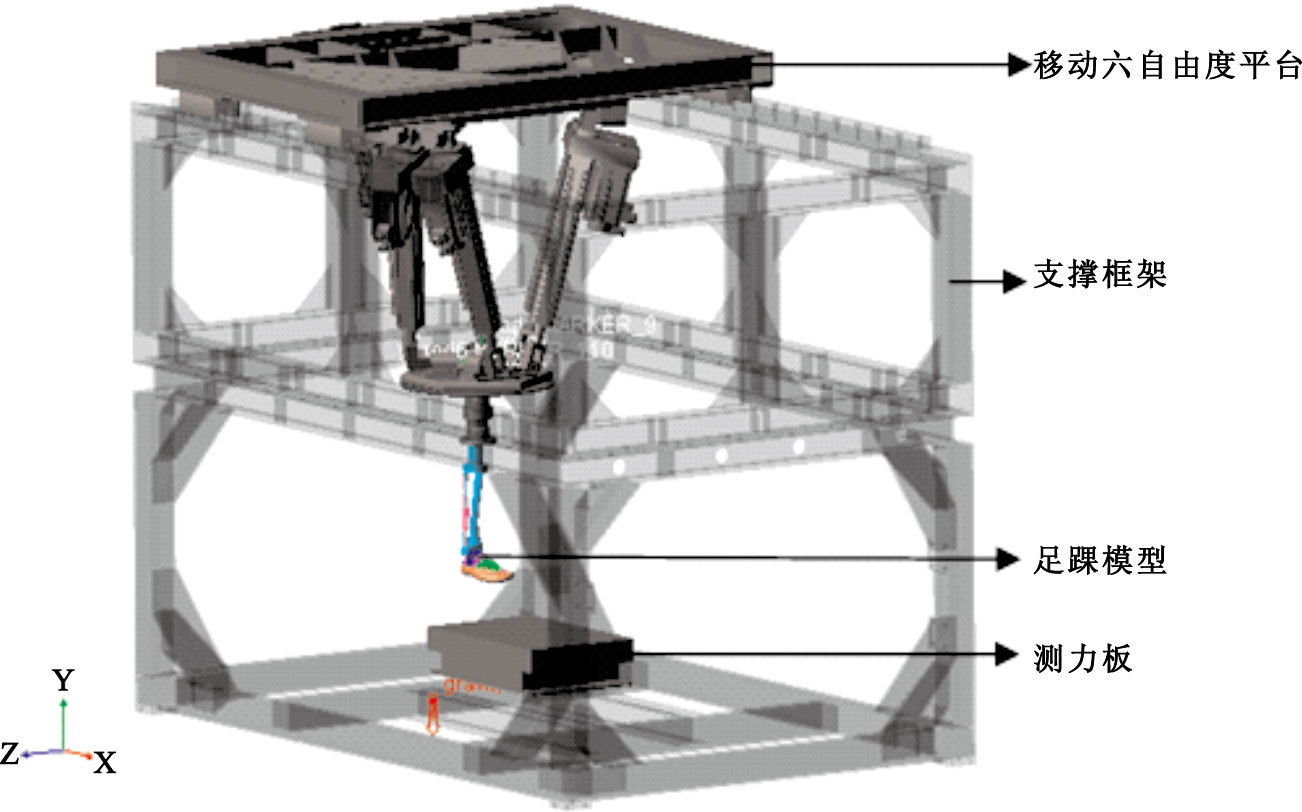 圖1
混合驅動人體步態試驗機整體結構
Figure1.
Overall structure of hybrid gait simulator
圖1
混合驅動人體步態試驗機整體結構
Figure1.
Overall structure of hybrid gait simulator
1.2 足部模型的建立
本次仿真涉及到的模型主要是由脛骨、腓骨以及整個足部組成。骨骼模型來源于本課題組在個性化踝關節設計的研究中建立的模型[18]。最近的研究中多采用將足部分塊的方法[19-23]。Lundgren等[8]報道了行走過程中足部各個骨塊之間的相對運動范圍。本文將足部分為4部分,分別是:由跟骨和距骨組成的后足部分;由足舟骨、內側楔骨、中間楔骨、外側楔骨以及骰骨組成的中足部分;第一跖骨到第五跖骨組成的前中足部分;趾骨組成的前足部分。脛骨和后足部分之間用球鉸連接;后足和中足、中足和前中足、前中足和前足之間均為轉動副[24]。定義完運動關系之后的足部三維模型如圖 2所示。
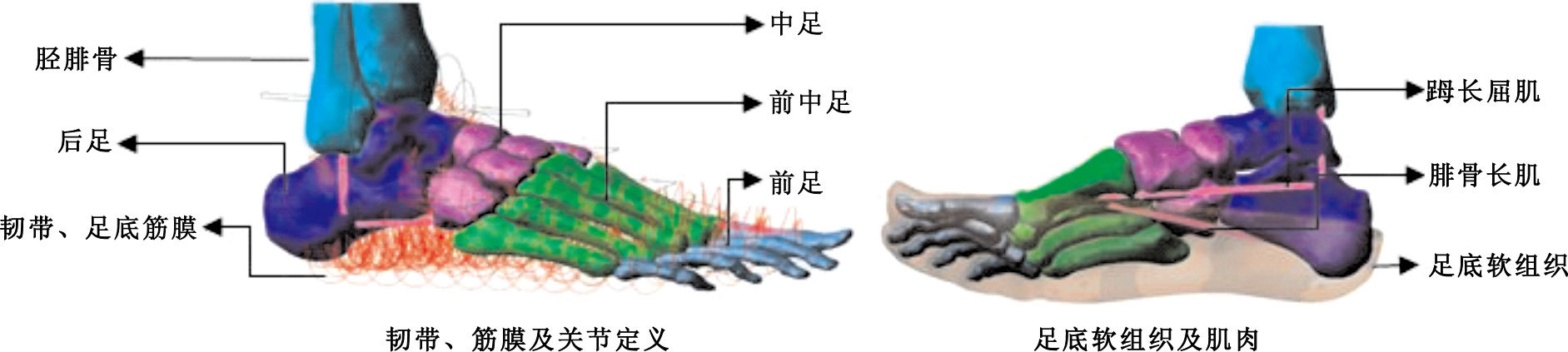 圖2
足踝分塊模型
Figure2.
Multi-segment foot and ankle model
圖2
足踝分塊模型
Figure2.
Multi-segment foot and ankle model
在ADAMS中,用彈簧阻尼系統建立筋膜和韌帶的模型,始末位置根據解剖學中韌帶、腱膜的附著點位置確定,然后賦予相應的剛度系數和阻尼[25]。 Aubin等[16]研究了長屈肌、腓骨長肌、腓骨短肌、趾長伸肌、長伸肌、小腿三角肌及脛骨前肌等肌肉在步態中受力的情況。在本模型中,忽略對步態進程影響較小的肌肉,如趾長伸肌、脛骨前肌、姆長伸肌等,著重考察長屈肌、腓骨長肌、跟腱力。在ADAMS 2013以后的版本中,都集成了可以模擬繩索傳動的Cable系統。根據人體足部肌肉的解剖學形態,利用Cable系統建立肌肉模型。長屈肌及腓骨長肌模型如圖 2所示。跟腱力直接加載在跟骨上,肌肉力的加載數據來源于Aubin等[16] 的研究。所選材料參數如表 1所示[25-26]。
足底軟組織模型是通過ADAMS中提供的ADAMS/Flex模塊建立。根據Erdemir等[27]的研究,在足底軟組織變形量小于35%時,可以將其視為線彈性材料。切取足底軟組織三維模型中和足底相連的部分,在有限元分析軟件Abaqus中生成模態中性文件導入ADAMS中。軟組織的彈性模量為0.91 MPa,泊松比為0.49[25]。
1.3 仿真驅動
選取移動六自由度平臺和脛骨連接處作為參考點P點。P點的局部坐標系和全局坐標系方向相同。整個仿真運動可分為兩個部分:移動六自由度平臺的運動及整個平臺的平移。移動六自由度平臺的運動包括:沿著X、Y、Z三個軸的移動和繞著X、Y、Z三個軸的轉動,共6個自由度的運動。整個平臺沿著X軸平移,且X軸正方向為前進方向。足部模型從足底到切取后脛骨上表面共700 mm。利用英國Salford大學步態試驗中測得的數據作為驅動[8]。其中受試者平均體重70 kg。數據包括控制點P在一個步態進程中的位移曲線、轉角曲線以及通過測得的地面反作用力推算出的P點的受力和力矩。同時,根據Aubin等[16]的報道,加載跟腱力、長屈肌、腓骨長肌肌肉力,如圖 3所示。而整個平臺的平移為步態中脛骨在矢狀面上位移距離的30%,從而使得機構能夠有較大的運動范圍。整個步態歷時0.7 s。
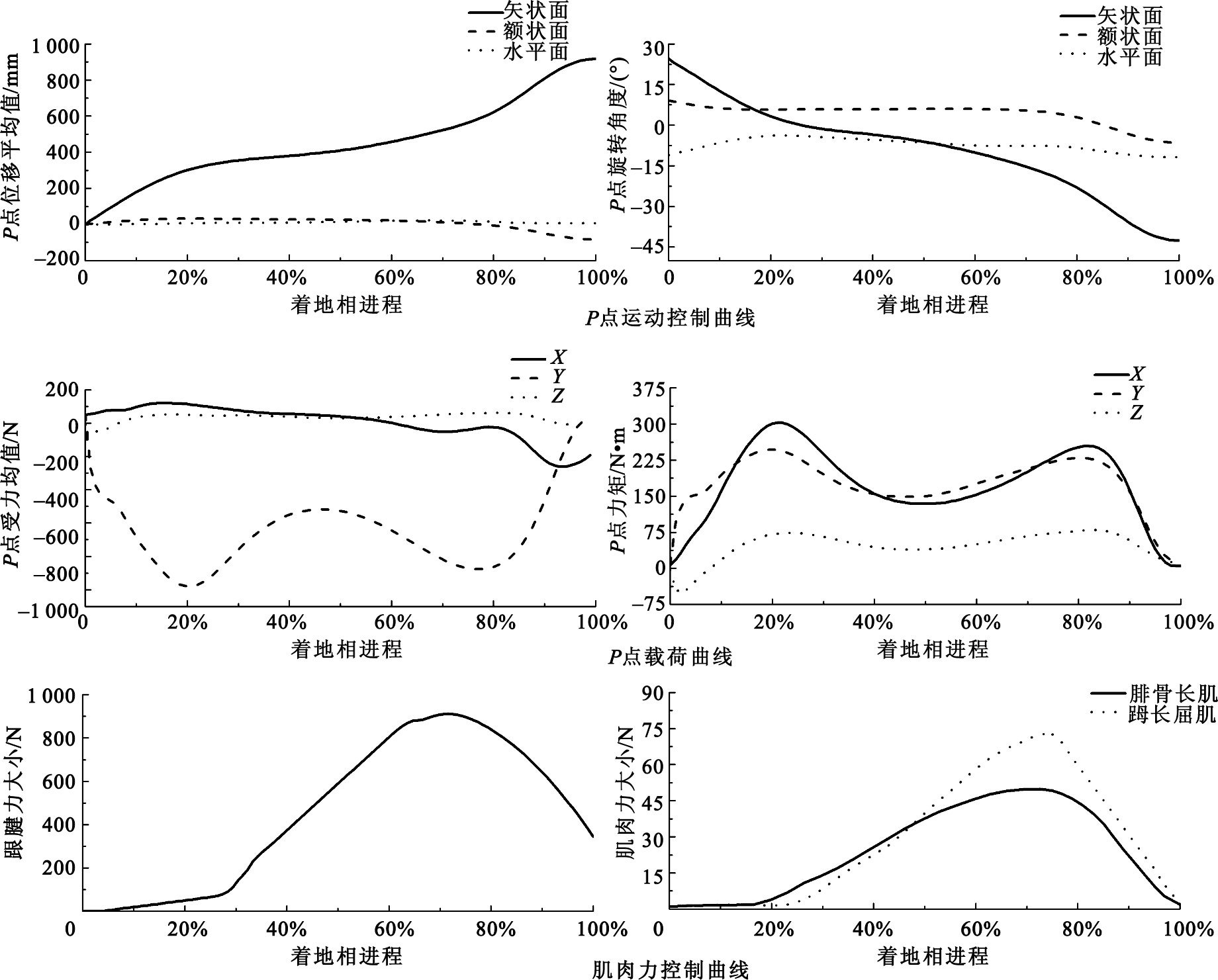 圖3
P點仿真驅動數據
Figure3.
Simulation driven data at point P
圖3
P點仿真驅動數據
Figure3.
Simulation driven data at point P
2 結果
2.1 著地相中地面反作用力
仿真中三個特征時刻為:腳跟著地、站立中相及腳尖離地,如圖 4所示。在仿真實驗中,將足底軟組織和測力板之間的接觸力視為地面反作用力。Y方向地面反作用力曲線有兩個峰值,呈“M”型,如圖 5所示。軟組織和地面之間的接觸定義為柔性體和剛體之間的接觸。足底和地面的摩擦系數為0.6,忽略關節和關節之間的摩擦[28]。實驗中,Y方向足底反作用力的兩個波峰分別出現在步態進程的20%和73%處,波谷出現在步態進程的43%處,反作用力值分別為1.13倍體重、1.2倍體重和0.6倍體重。X方向的力有兩個峰值,分別是步態進程20%處,為0.4倍體重;78%進程處,為0.32倍體重。在步態進程43%時刻,X方向地面反作用力改變方向,如圖 5所示。
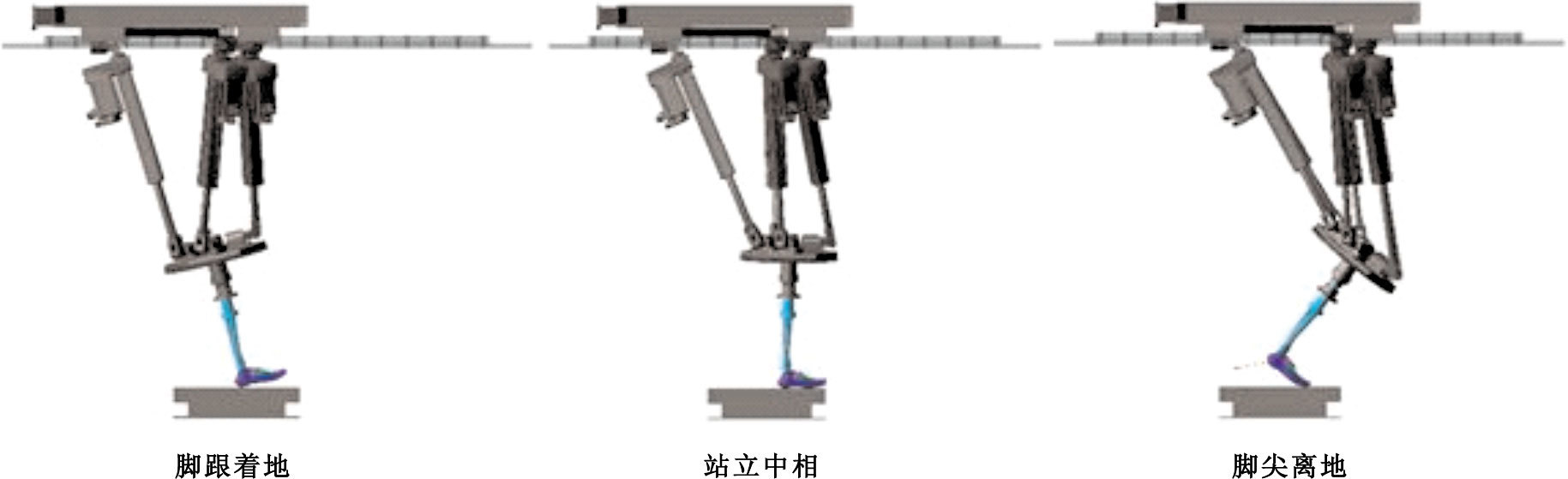 圖4
著地相仿真過程
Figure4.
Stance phase simulation
圖4
著地相仿真過程
Figure4.
Stance phase simulation
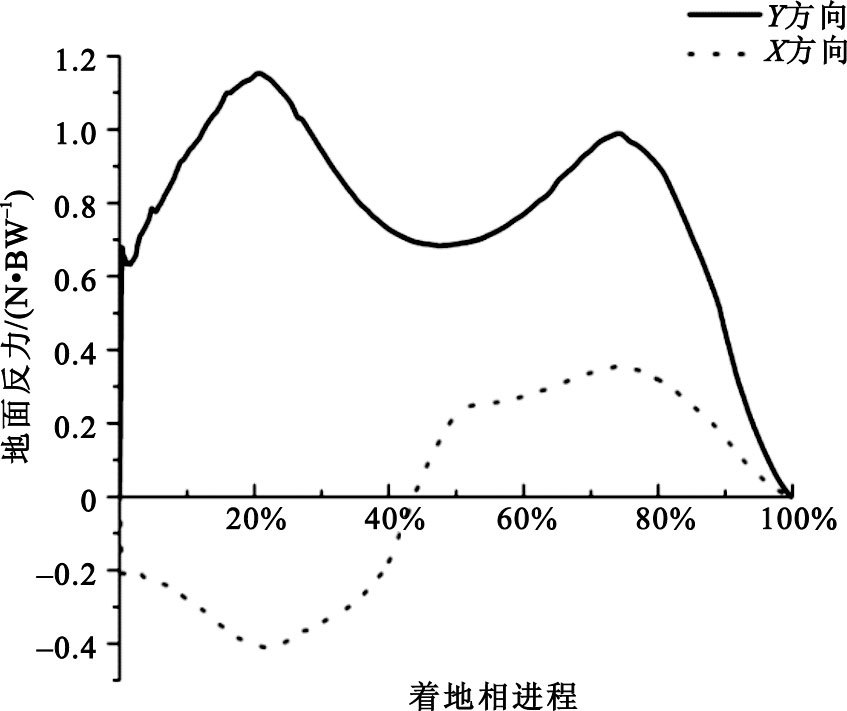 圖5
著地相進程中X、Y方向地面反作用力
Figure5.
Ground reaction forces in X,Y directions during stance phase
圖5
著地相進程中X、Y方向地面反作用力
Figure5.
Ground reaction forces in X,Y directions during stance phase
2.2 關節運動分析
根據足部的分塊,主要分析模型中定義的4個關節的旋轉情況,即踝關節、中足關節、前中足關節、前足關節之間的相對旋轉情況。各個關節之間的相對運動角度如圖 6所示。
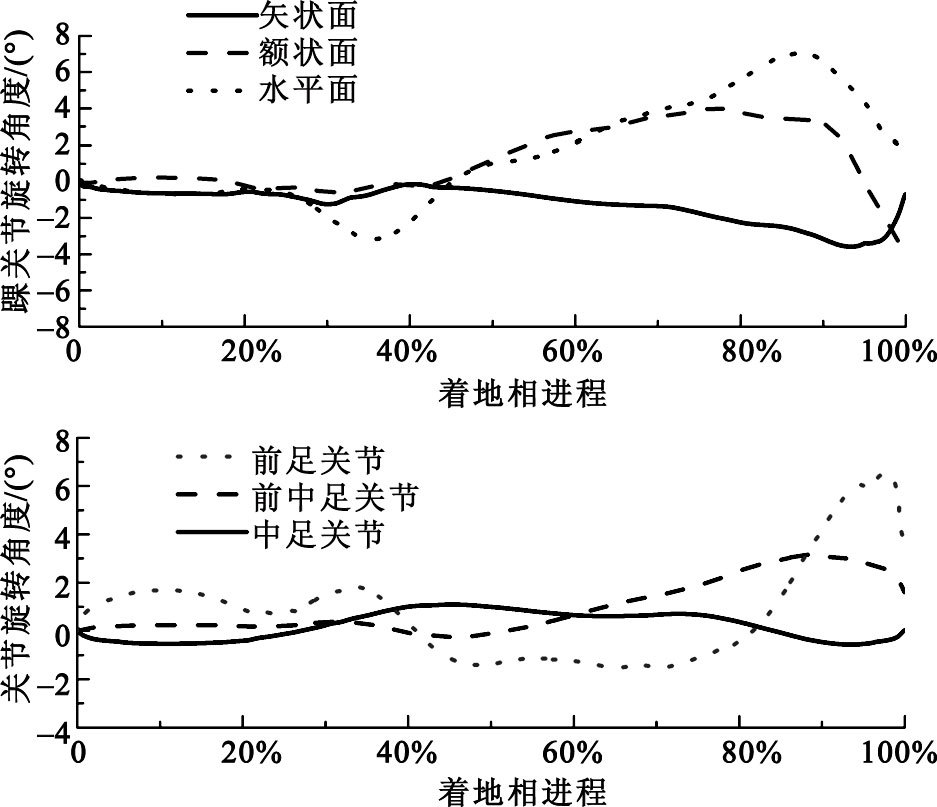 圖6
模型中各關節相對旋轉角度范圍
Figure6.
Range of motion at each joint of foot model
圖6
模型中各關節相對旋轉角度范圍
Figure6.
Range of motion at each joint of foot model
對于踝關節,有3個轉動自由度:矢狀面內的活動角度是12°(-4~8°),額狀面內的活動角度是5°(-4~1°),水平面內的活動角度是7°(-3~4°)。對于中足關節,前中足關節、前足關節均只有一個矢狀面內的轉動自由度。中足關節的活動角度是3°(-1~2°),前中足關節的活動角度是4°(-0.5~3.5°),前足關節的活動角度是9°(-2~7°)。
2.3 肌肉力的比較
本次步態模擬中,總共加載3根肌肉力:跟腱力、長屈肌力及腓骨長肌力。其中,跟腱力在步態中的變化規律可分為兩個階段:從腳跟著地到站立中相;從站立中相到腳尖離地。在前一階段,跟腱力幅值小且增速慢,力值在100~300 N范圍內;從站立中相結束開始,跟腱力大幅增加,到75%著地相進程時刻達到最大值950 N,隨后跟腱力開始大幅下降,直至著地相結束。腓骨長肌和長屈肌的肌肉力在0%~20%步態進程階段幅值穩定在5 N左右;從20%步態進程開始增幅變大,在75%步態時刻達到最大值,分別為50 N和70 N,隨后肌肉力開始減小,至著地相結束。
3 討論
本文利用ADAMS的多體動力學仿真功能,結合其中的ADAMS/flexible模塊,建立起細致有效的足部模型,并利用一種新型的混合驅動步態仿真器,實現人體步態整個著地相的連續動態仿真,期望可以用于各種病理生理狀態研究,也可作為相關康復方案比較的研究工具。地面反作用力可以作為模型驗證的一個標準。本文的仿真實驗中,X和Y方向地面反作用力曲線的峰值出現的時刻分布在20%、43%和73%步態周期時刻,和Lundgren等[8, 29-30]的研究有較高的一致性。Giakas等[29]的研究中,Y方向上地面反作用力在1.06~1.17倍體重范圍內。本文Y方向的峰值力大小在1.1~1.14倍體重范圍內,而文獻[16]的力值約為0.8倍體重。這是由于脛骨力的加載不同造成的。本模型中脛骨力的加載完全按照試驗樣本正常步態下的力值來加載,而Aubin等[16]在實驗中未加載到正常體重。這也造成了X方向地面反力在數值上存在差異,如表 2所示。由此說明本次仿真結果接近真實步態情況下的足底反力情況。
本文將足部分成了4塊,因此足部的運動局限于分塊和分塊之間。Lundgren等[8]在實驗中測量得到距脛關節、足舟骨和距骨、跖骨和楔骨在矢狀面內的旋轉范圍分別為15.3°、8.4°、5.3°。Macwilliams等[31]測得步態中踝關節在矢狀面、額狀面、水平面內的旋轉角度分別為13°、9°、6°。Jenkyn等[20]的研究中,也將足部分成了4個部分,踝關節在3個平面內的運動范圍分別為15.1°、10°、8°。在矢狀面和水平面內,本模型的旋轉角度和實際情況比較接近,而在額狀面內的旋轉角度范圍較實際情況偏小。原因可能是本模型中只添加了長屈肌、腓骨長肌,無法靈活地調整踝關節處水平面內的旋轉。由于不同足部分塊模型中關節的定義略有差異,例如Jenkyn等[20]將跖骨分為了兩部分,相關研究中得到的其他關節旋轉角度只能作為相對參考。本模型中的中足關節、前中足關節及前足關節旋轉角度范圍較Deschamps等[19]、Jenkyn等[20]、Macwilliams等[31]的相應關節的運動范圍而言偏小。這種差異一方面是由于模型中添加了韌帶、筋膜模型后,雖然足部的活動度在正常范圍內,卻也使得關節剛度比實際情況要大,活動范圍變小;另一方面,是由于足部的分塊及運動副的定義,使得實際中存在相對運動的骨塊之間的運動受到部分限制,比如跗橫關節和跗跖關節在額狀面和水平面上的旋轉以及足舟骨和股骨之間的運動等,造成足部的旋轉角度比實際測量中的角度要小。在后續的研究中,可以增加更多的足部肌肉模型并使其協調步態,使得仿真中關節的旋轉運動更接近實際情況。
本文中的模型包含韌帶、筋膜、肌肉等結構,在足部動力學仿真中得到的地面反作用力及關節運動規律和實際情況大致相符,今后可以進一步改善足踝分塊模型精細結構使其能更好地優化關節旋轉、協調步態運動,獲得更接近實際情況的仿真結果,使該模型可以作為深入步態分析及臨床病理生理狀態研究的有效實用工具。
引言
傳統的在體步態分析對于了解足部疾病病理、優化康復治療方案具有重要意義[1-2]。在體步態分析中,一些參數比如步幅、步頻、足偏角、地面反作用力以及關節力矩等易于直接測得或者通過反向動力學的方法計算得到[3-4]。但是,另一些數據比如各個骨塊之間的相對位移、參與調整步態的肌肉力的大小等均無法直接得到[5-6]。通過向在體骨骼打鋼針的運動學和動力學試驗研究可以得到各個骨塊的相對運動情況,但是一般在體試驗會對受試者造成創傷,因而很難找到志愿者,即使有志愿者,也無法測得肌肉力[7-8]。因此,通過建立仿真模型模擬真實情況以獲得有參考價值的數據已逐漸成為此類研究的重要手段。最近的一些步態仿真實驗中用到的模型主要分三類:一類用規則的幾何模型來代替骨骼模型[9-10];另一類是有限元模型[11-13];第三類是尸體足踝步態模擬模型[14-15]。其中,規則的幾何模型可以對步態進行宏觀研究,而骨骼和骨骼之間、骨骼和肌肉之間的相互作用并不能在模型上得到反映;有限元可以得到步態過程中骨骼上的應力分布,但是大部分僅僅局限于步態中的幾個姿態,而不能很好地模擬整個步態;尸體模型的運動特性和在體存在差異,且新鮮尸體足樣本難以獲得。因此,一個精細且能用于動態步態仿真的足踝模型已成為足踝運動學和動力學特性研究的必要工具。
目前,Aubin等[16]研制的六自由度步態仿真機能夠很好地控制脛骨的運動,但是由于機器的局限性以及尸體足強度比常人足強度小等原因,無法完全按照實際情況加載脛骨力,在實驗中縮小了脛骨加載力。前期,本課題組自行研發了混合驅動型人體步態試驗機(專利號:CN104504984A)[17],旨在完全按照實際情況進行人體步態試驗及相關研究。當前,機械系統動力學自動分析軟件 (automatic dynamic analysis of mechanical systems,ADAMS)在多剛體運動學分析中有著廣泛的應用。其有著建模方便、運動關系定義快捷、可以與其他工程軟件實現交互等優勢;且軟件集合了模擬繩索、柔性體的模塊,能夠用于建立足部的肌肉、足底軟組織等模型。為此,本文的研究在ADAMS中建立足踝分塊模型,結合步態試驗機的三維模型,運用在體試驗測得的步態數據來驅動仿真,模擬真實的步態,對比分析足踝步態中各運動模塊之間的運動關系,以驗證模型的有效性,為試驗機的驅動控制提供基礎數據,為深入研究步態中韌帶、肌肉及足底軟組織的生物力學特性和臨床疾病治療的機制研究提供數值仿真分析平臺。
1 材料與方法
1.1 六自由度平臺建模
本文用到的混合驅動人體步態試驗機的核心部分是六自由度平臺。如圖 1所示。整個系統的全局坐標系定義如圖 1左下角所示。各個零部件的局部坐標系和全局坐標系的方向相同,位于各自的重心處。足部解剖學中的矢狀面、額狀面及水平面分別對應全局坐標系中的XY平面、YZ平面、XZ平面。由于步態中足部在矢狀面內位移較大,我們在機架上加入滑軌機構,使得整個平臺能在矢狀面內移動,增大移動范圍。因此,平臺和支撐框架之間用移動副連接,只有一個移動自由度。移動六自由度平臺中,六根電動缸和各自的伸縮桿之間用圓柱副連接,均存在一個移動自由度和一個轉動自由度,平臺內部沒有相對運動的部件之間用固定副連接,限制所有自由度。另外,在平臺下方置有測力板,和支承框架之間采用固定副連接,能實現步態中足部與地面三個方向的反力測量。同時,將足踝模型的脛骨部分和移動六自由度平臺固定連接。
圖1
混合驅動人體步態試驗機整體結構
Figure1.
Overall structure of hybrid gait simulator
1.2 足部模型的建立
本次仿真涉及到的模型主要是由脛骨、腓骨以及整個足部組成。骨骼模型來源于本課題組在個性化踝關節設計的研究中建立的模型[18]。最近的研究中多采用將足部分塊的方法[19-23]。Lundgren等[8]報道了行走過程中足部各個骨塊之間的相對運動范圍。本文將足部分為4部分,分別是:由跟骨和距骨組成的后足部分;由足舟骨、內側楔骨、中間楔骨、外側楔骨以及骰骨組成的中足部分;第一跖骨到第五跖骨組成的前中足部分;趾骨組成的前足部分。脛骨和后足部分之間用球鉸連接;后足和中足、中足和前中足、前中足和前足之間均為轉動副[24]。定義完運動關系之后的足部三維模型如圖 2所示。
圖2
足踝分塊模型
Figure2.
Multi-segment foot and ankle model
在ADAMS中,用彈簧阻尼系統建立筋膜和韌帶的模型,始末位置根據解剖學中韌帶、腱膜的附著點位置確定,然后賦予相應的剛度系數和阻尼[25]。 Aubin等[16]研究了長屈肌、腓骨長肌、腓骨短肌、趾長伸肌、長伸肌、小腿三角肌及脛骨前肌等肌肉在步態中受力的情況。在本模型中,忽略對步態進程影響較小的肌肉,如趾長伸肌、脛骨前肌、姆長伸肌等,著重考察長屈肌、腓骨長肌、跟腱力。在ADAMS 2013以后的版本中,都集成了可以模擬繩索傳動的Cable系統。根據人體足部肌肉的解剖學形態,利用Cable系統建立肌肉模型。長屈肌及腓骨長肌模型如圖 2所示。跟腱力直接加載在跟骨上,肌肉力的加載數據來源于Aubin等[16] 的研究。所選材料參數如表 1所示[25-26]。
足底軟組織模型是通過ADAMS中提供的ADAMS/Flex模塊建立。根據Erdemir等[27]的研究,在足底軟組織變形量小于35%時,可以將其視為線彈性材料。切取足底軟組織三維模型中和足底相連的部分,在有限元分析軟件Abaqus中生成模態中性文件導入ADAMS中。軟組織的彈性模量為0.91 MPa,泊松比為0.49[25]。
1.3 仿真驅動
選取移動六自由度平臺和脛骨連接處作為參考點P點。P點的局部坐標系和全局坐標系方向相同。整個仿真運動可分為兩個部分:移動六自由度平臺的運動及整個平臺的平移。移動六自由度平臺的運動包括:沿著X、Y、Z三個軸的移動和繞著X、Y、Z三個軸的轉動,共6個自由度的運動。整個平臺沿著X軸平移,且X軸正方向為前進方向。足部模型從足底到切取后脛骨上表面共700 mm。利用英國Salford大學步態試驗中測得的數據作為驅動[8]。其中受試者平均體重70 kg。數據包括控制點P在一個步態進程中的位移曲線、轉角曲線以及通過測得的地面反作用力推算出的P點的受力和力矩。同時,根據Aubin等[16]的報道,加載跟腱力、長屈肌、腓骨長肌肌肉力,如圖 3所示。而整個平臺的平移為步態中脛骨在矢狀面上位移距離的30%,從而使得機構能夠有較大的運動范圍。整個步態歷時0.7 s。
圖3
P點仿真驅動數據
Figure3.
Simulation driven data at point P
2 結果
2.1 著地相中地面反作用力
仿真中三個特征時刻為:腳跟著地、站立中相及腳尖離地,如圖 4所示。在仿真實驗中,將足底軟組織和測力板之間的接觸力視為地面反作用力。Y方向地面反作用力曲線有兩個峰值,呈“M”型,如圖 5所示。軟組織和地面之間的接觸定義為柔性體和剛體之間的接觸。足底和地面的摩擦系數為0.6,忽略關節和關節之間的摩擦[28]。實驗中,Y方向足底反作用力的兩個波峰分別出現在步態進程的20%和73%處,波谷出現在步態進程的43%處,反作用力值分別為1.13倍體重、1.2倍體重和0.6倍體重。X方向的力有兩個峰值,分別是步態進程20%處,為0.4倍體重;78%進程處,為0.32倍體重。在步態進程43%時刻,X方向地面反作用力改變方向,如圖 5所示。
圖4
著地相仿真過程
Figure4.
Stance phase simulation
圖5
著地相進程中X、Y方向地面反作用力
Figure5.
Ground reaction forces in X,Y directions during stance phase
2.2 關節運動分析
根據足部的分塊,主要分析模型中定義的4個關節的旋轉情況,即踝關節、中足關節、前中足關節、前足關節之間的相對旋轉情況。各個關節之間的相對運動角度如圖 6所示。
圖6
模型中各關節相對旋轉角度范圍
Figure6.
Range of motion at each joint of foot model
對于踝關節,有3個轉動自由度:矢狀面內的活動角度是12°(-4~8°),額狀面內的活動角度是5°(-4~1°),水平面內的活動角度是7°(-3~4°)。對于中足關節,前中足關節、前足關節均只有一個矢狀面內的轉動自由度。中足關節的活動角度是3°(-1~2°),前中足關節的活動角度是4°(-0.5~3.5°),前足關節的活動角度是9°(-2~7°)。
2.3 肌肉力的比較
本次步態模擬中,總共加載3根肌肉力:跟腱力、長屈肌力及腓骨長肌力。其中,跟腱力在步態中的變化規律可分為兩個階段:從腳跟著地到站立中相;從站立中相到腳尖離地。在前一階段,跟腱力幅值小且增速慢,力值在100~300 N范圍內;從站立中相結束開始,跟腱力大幅增加,到75%著地相進程時刻達到最大值950 N,隨后跟腱力開始大幅下降,直至著地相結束。腓骨長肌和長屈肌的肌肉力在0%~20%步態進程階段幅值穩定在5 N左右;從20%步態進程開始增幅變大,在75%步態時刻達到最大值,分別為50 N和70 N,隨后肌肉力開始減小,至著地相結束。
3 討論
本文利用ADAMS的多體動力學仿真功能,結合其中的ADAMS/flexible模塊,建立起細致有效的足部模型,并利用一種新型的混合驅動步態仿真器,實現人體步態整個著地相的連續動態仿真,期望可以用于各種病理生理狀態研究,也可作為相關康復方案比較的研究工具。地面反作用力可以作為模型驗證的一個標準。本文的仿真實驗中,X和Y方向地面反作用力曲線的峰值出現的時刻分布在20%、43%和73%步態周期時刻,和Lundgren等[8, 29-30]的研究有較高的一致性。Giakas等[29]的研究中,Y方向上地面反作用力在1.06~1.17倍體重范圍內。本文Y方向的峰值力大小在1.1~1.14倍體重范圍內,而文獻[16]的力值約為0.8倍體重。這是由于脛骨力的加載不同造成的。本模型中脛骨力的加載完全按照試驗樣本正常步態下的力值來加載,而Aubin等[16]在實驗中未加載到正常體重。這也造成了X方向地面反力在數值上存在差異,如表 2所示。由此說明本次仿真結果接近真實步態情況下的足底反力情況。
本文將足部分成了4塊,因此足部的運動局限于分塊和分塊之間。Lundgren等[8]在實驗中測量得到距脛關節、足舟骨和距骨、跖骨和楔骨在矢狀面內的旋轉范圍分別為15.3°、8.4°、5.3°。Macwilliams等[31]測得步態中踝關節在矢狀面、額狀面、水平面內的旋轉角度分別為13°、9°、6°。Jenkyn等[20]的研究中,也將足部分成了4個部分,踝關節在3個平面內的運動范圍分別為15.1°、10°、8°。在矢狀面和水平面內,本模型的旋轉角度和實際情況比較接近,而在額狀面內的旋轉角度范圍較實際情況偏小。原因可能是本模型中只添加了長屈肌、腓骨長肌,無法靈活地調整踝關節處水平面內的旋轉。由于不同足部分塊模型中關節的定義略有差異,例如Jenkyn等[20]將跖骨分為了兩部分,相關研究中得到的其他關節旋轉角度只能作為相對參考。本模型中的中足關節、前中足關節及前足關節旋轉角度范圍較Deschamps等[19]、Jenkyn等[20]、Macwilliams等[31]的相應關節的運動范圍而言偏小。這種差異一方面是由于模型中添加了韌帶、筋膜模型后,雖然足部的活動度在正常范圍內,卻也使得關節剛度比實際情況要大,活動范圍變小;另一方面,是由于足部的分塊及運動副的定義,使得實際中存在相對運動的骨塊之間的運動受到部分限制,比如跗橫關節和跗跖關節在額狀面和水平面上的旋轉以及足舟骨和股骨之間的運動等,造成足部的旋轉角度比實際測量中的角度要小。在后續的研究中,可以增加更多的足部肌肉模型并使其協調步態,使得仿真中關節的旋轉運動更接近實際情況。
本文中的模型包含韌帶、筋膜、肌肉等結構,在足部動力學仿真中得到的地面反作用力及關節運動規律和實際情況大致相符,今后可以進一步改善足踝分塊模型精細結構使其能更好地優化關節旋轉、協調步態運動,獲得更接近實際情況的仿真結果,使該模型可以作為深入步態分析及臨床病理生理狀態研究的有效實用工具。