為了提高基于運動想象(MI)的腦控智能小車的控制性能,本文提出一種基于腦電(EEG)信號神經反饋(NF)控制智能小車的方法。采用 MI 心理策略,通過實時呈現該心理活動相關 EEG 信號特征的能量柱形圖給受試者,訓練受試者快速掌握 MI 技能并調節其 EEG 信號的活動,并以 MI 多特征融合和多分類器決策相結合的方法,從而在線腦控智能小車。訓練組(試驗前接受設計的反饋系統訓練)取得平均、最高和最低的識別指令準確率分別為 85.71%、90.47% 和 76.19%,對照組(不接受訓練)對應的準確率分別為 73.32%、80.95% 和 66.67%;訓練組平均、最長和最短用時分別為 92 s、101 s 和 85 s,對照組對應的用時分別為 115.7 s、120 s 和 110 s。通過以上試驗研究結果,期望本文可為后續基于 MI 的 EEG 信號 NF 控制智能機器人的開發提供新的思路。
引用本文: 李松, 熊馨, 伏云發. 基于腦電信號神經反饋控制智能小車的研究. 生物醫學工程學雜志, 2018, 35(1): 15-24. doi: 10.7507/1001-5515.201612080 復制
版權信息: ?四川大學華西醫院華西期刊社《生物醫學工程學雜志》版權所有,未經授權不得轉載、改編
引言
腦-機交互(brain-computer interaction,BCI)是一種新型的人機交互技術,不依賴于(繞過)大腦外周神經和肌肉的參與,而是利用中樞神經系統感知或認知思維活動誘發的腦電(electroencephalogram,EEG)信號經由采集系統獲取后并解碼感知思維意圖,從而將腦活動信息轉化為控制信號,實現大腦直接與外部設備進行通信或控制[1-3]。BCI 在機器人領域的一個重要應用是腦控機器人(brain-controlled robot,BCR),其中一類 BCR 的方法是基于運動想象(motor imagery,MI)誘發的 EEG 信號的 BCI。
基于 MI 的 BCI 系統是由受試者(用戶)自主心理活動誘發的 EEG 信號來驅動,有別于由外部刺激受試者(用戶)產生 EEG 信號驅動的反應式 BCI 系統以及僅監測受試者腦狀態或神經生理信號變化的被動式 BCI 系統[4-5]。雖然 MI 的 BCI 系統沒有受到由于外部刺激對受試者(用戶)產生的負面影響,然而僅憑受試者(用戶)自主心理活動難以實現可控性和顯示的可觀測性,這給該類 BCI 系統走向實用化設置了極大的障礙[6-7]。近些年來,雖然研究者在解析 MI 模式的算法方面不斷創新,但其性能依然難有大的提高,且存在較多無效受試者(即國際公認的系統操作識別率低于 70% 的“BCI 盲”)等關鍵性問題[8]。其原因是對于 MI 范式的 BCI 系統,不少受試者(用戶)很難快速有效地產生驅動該類 BCI 所需的控制信號。受試者(用戶)學會自主產生并調節事件相關去同步(event-related desynchronization,ERD)信號和事件相關同步(event-related synchronization,ERS)信號對提高系統的性能十分關鍵[9-11]。因此,高效訓練受試者(用戶)MI 的方法或系統是該類 BCI 系統得以實際運用的關鍵技術之一,已成為一個重要的突破點。Neuper 等[12-13]采用 EEG 信號控制滾動條的移動作為神經反饋(neurofeedback,NF)信號,來提高左右手 MI 誘發的 EEG 信號,訓練前后的結果差異具有統計學意義;Yu 等[14]提出了一種 MI 和穩態視覺誘發電位(steady-state visually evoked potentials,SSVEPs)混合模式的 BCI NF,在一定程度上提高了 MI 訓練效果;Hwang 等[15]采用實時同步 EEG 能量地形圖作為 NF,對受試者進行訓練后分類效果有一定的提高。這些 NF 方法中,大多采用的是同步反饋,即受試者根據計算機提示執行任務,采集系統會根據不同任務采集的數據打上相應的同步標記并根據標記處理數據;還有一些采用的是異步反饋(即受試者在無計算機提示的情況下,按自主意愿執行任務,采集系統不會打同步標記),但其反饋大都缺乏優化。本研究擬探索優化的 NF 方法,因此提出了一種基于 EEG 信號特征能量柱形圖的異步實時 NF 控制方法,通過幫助受試者(用戶)學習自主調節 MI 的腦活動,使其對 MI 誘發的 EEG 信號具有一定程度的可控性和可觀測性,最終實現控制智能小車并進行相關測試。
除了上述 MI 心理活動的可控性和可觀測性問題外,目前 MI 模式的解碼精度、穩定性和可靠性并不高,一個主要原因是 MI 誘發的 EEG 信號特征具有變異性。為此,構建可分性好的 MI 誘發的 EEG 信號特征向量依然是一個問題。此外,傳統分類 MI 誘發的 EEG 信號特征向量主要采用單一的分類器決策,這可能增加錯分類的風險。由于單分類器的推廣能力有限,可考慮多分類器聯合決策,降低錯誤決策后帶來的控制風險。本研究擬采用希爾伯特-黃變換(hilbert-huang transform,HHT)和功率譜密度相結合作為 EEG 信號特征向量,并以極限學習機(extreme learning machine,ELM)、線性判別分析(linear discriminant analysis,LDA)和支持向量機(support vector machine,SVM)聯合決策分類的方法,以期達到提高解碼結果可靠性,提高指令識別準確率的目的,可望為后續基于 MI 誘發的 EEG 信號 NF 控制智能機器人的開發提供思路。
1 材料和方法
1.1 受試者、EEG 信號采集設備及參數
1.1.1 受試者
10 名受試者(招募自昆明理工大學,隨機確定編號為:S1~S10),8 名男性和 2 名女性,年齡范圍在 20~26 歲,本科以上學歷。按編號分為訓練組(S1~S5,試驗前接受設計的在線 NF 異步系統訓練)與對照組(S6~S10,不接受訓練)。所有受試者身體健康,無感覺運動疾病和心理病史。均為自愿參與 EEG 信號數據采集、MI 能力訓練、分類模型訓練并在線測試控制智能小車試驗。本研究由昆明理工大學倫理道德委員會批準,每個受試者在試驗前簽署了試驗研究知情同意書。
1.1.2 EEG 信號采集設備及參數
本次試驗的 EEG 信號采集設備為 16 導聯的 EEG 信號放大器(Mipower-UC,EEG Collection_V2,清華大學神經工程實驗室)。該設備參數如下:采樣頻率1 000 Hz,24 位模/數轉換,信號頻帶為 0~250 Hz,輸入信號范圍是 ± 200 mV,同步事件輸入為 8 位輸入,無工頻陷波。根據國際標準的 10–20 系統定制電極帽(Ag-AgCl 粉末電極,武漢格林泰克科技有限公司)。本研究僅用位于左右初級感覺運動功能區的 C3 和 C4 電極作為記錄電極,額極中點(Fpz)為接地電極,左側乳突(M1)為參考電極。試驗要求所有電極的阻抗小于 5 kΩ,并保持穩定。
1.2 在線 NF 異步訓練
在基于 MI 誘發的 EEG 信號的 BCI 系統中,快速有效地使受試者(用戶)在不同 MI 模式之間產生差異具有統計學意義的 EEG 信號特征(如 ERD/ERS),是該類 BCI 系統走向實用化的關鍵之一。本文采用能量柱形圖設計了在線 NF 異步訓練系統,受試者以自定節奏執行 MI 心理活動,該系統可計算功率譜密度以能量柱形圖的形式實時呈現初級感覺運動區 EEG 信號特征變化情況。試驗時,受試者首先根據指導語熟悉左右手 MI 誘發的 EEG 信號特征的變化規律,如圖 1 所示。訓練組在試驗中可以借助于屏幕呈現的能量柱形圖來不斷熟悉并掌握 MI 的方法和技能,從而尋找自身最為有效的 MI 方式,這有助于在正式試驗時,能夠快速、準確地進行相應的 MI;而對照組不參與此系統的訓練,則有可能在 MI 的熟悉程度及自動 MI 能力方面會有所局限。
 圖1
在線 NF 異步訓練范式
Figure1.
Online NF asynchronous training paradigm
圖1
在線 NF 異步訓練范式
Figure1.
Online NF asynchronous training paradigm
1.3 在線異步控制智能小車
1.3.1 控制策略
在本研究中,要求受試者按照規劃的路線控制小車順利到達終點。為了完成任務,系統可控制小車以低速(3.75 cm/指令)直行、左轉[15°/指令]和右轉[15°/指令]運行。系統采用時間窗的方法,窗長為 1 000 ms,每隔 200 ms 對時間窗中 1 000 ms 的數據進行分析并更新一次控制指令。智能小車采用位置控制,即一個指令移動 3.75 cm,2 s 內可發出 5 個指令,則 2 s 內小車可移動 18.75 cm,每秒小車的移動距離為 9.375 cm,故小車的速度能達到 9.375 cm/s。如表 1 所示,受試者想象左手運動控制小車低速左轉,想象右手運動控制小車低速右轉,空閑狀態控制小車恒速前進。
1.3.2 訓練分類模型
用于訓練分類模型的 MI 誘發的 EEG 信號采集范式如圖 2 所示。0~1.5 s 為準備階段(顯示“+”號);1.5~3 s 為提示指令階段(呈現笑臉、左箭頭或右箭頭);3~8 s 為受試者 MI 階段(顯示“*”號);8 s 后屏幕空白顯示,為受試者休息時間。信號采集過程中,受試者按提示箭頭想象左右手運動,笑臉提示受試者不做任何 MI,即空閑狀態,每個測試的想象時間為 5 s,之后有 6~8 s 的休息時間。在線異步測試時,每隔 200 ms 利用時間窗前 1 000 ms 的數據提取特征并分類,即每 200 ms 輸出一個控制指令控制智能小車的運行狀態。
 圖2
MI 誘發的 EEG 信號采集范式
Figure2.
Paradigm of EEG acquisition for MI
圖2
MI 誘發的 EEG 信號采集范式
Figure2.
Paradigm of EEG acquisition for MI
1.3.3 在線異步測試
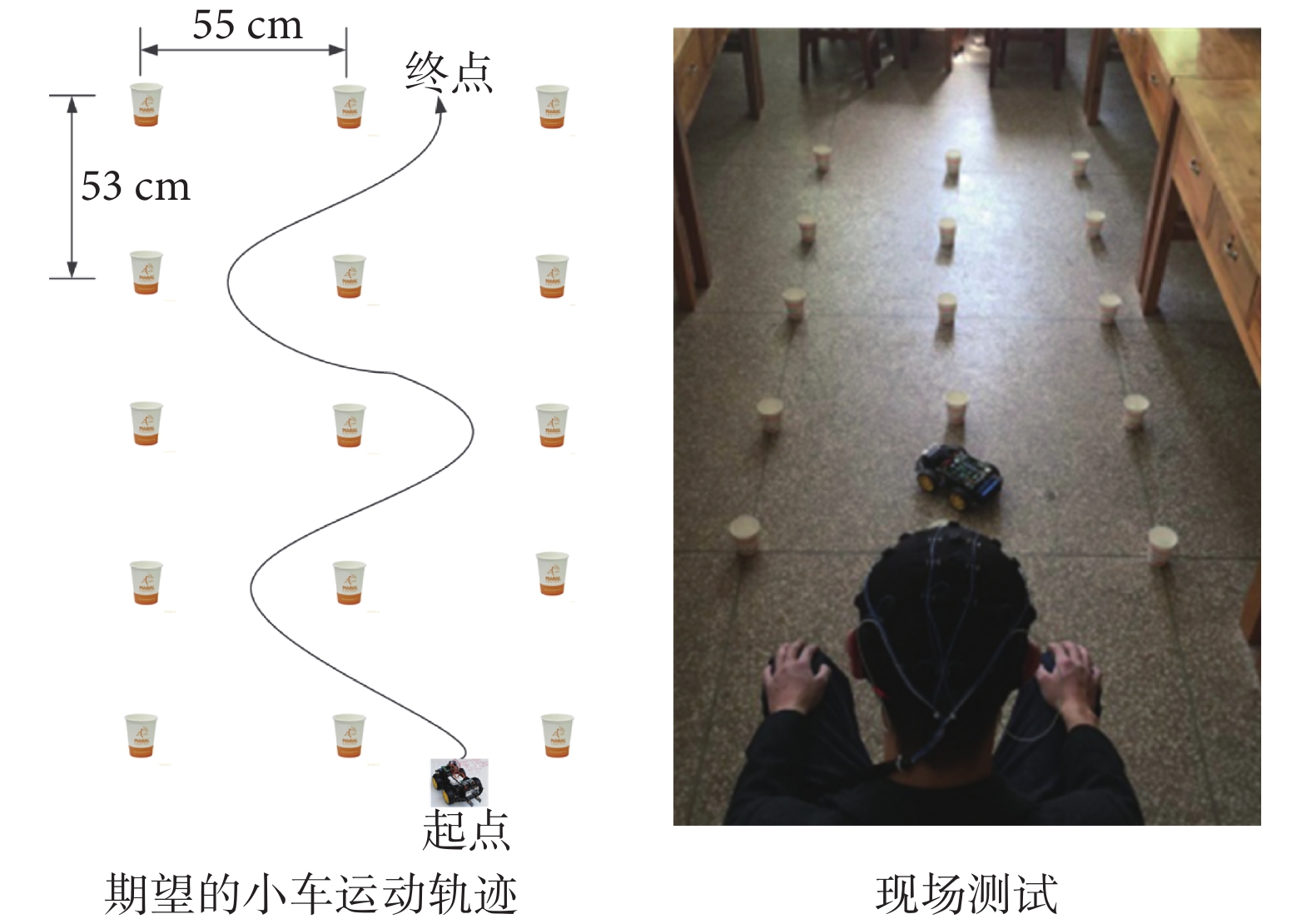
本試驗要求受試者控制智能小車按指定軌跡到達終點,如圖 3 所示。試驗過程中,由輔助人員分別記錄每名受試者控制小車達到終點的用時及碰撞次數,結束后計算出每組的平均用時(即訓練組和對照組分開計算)。
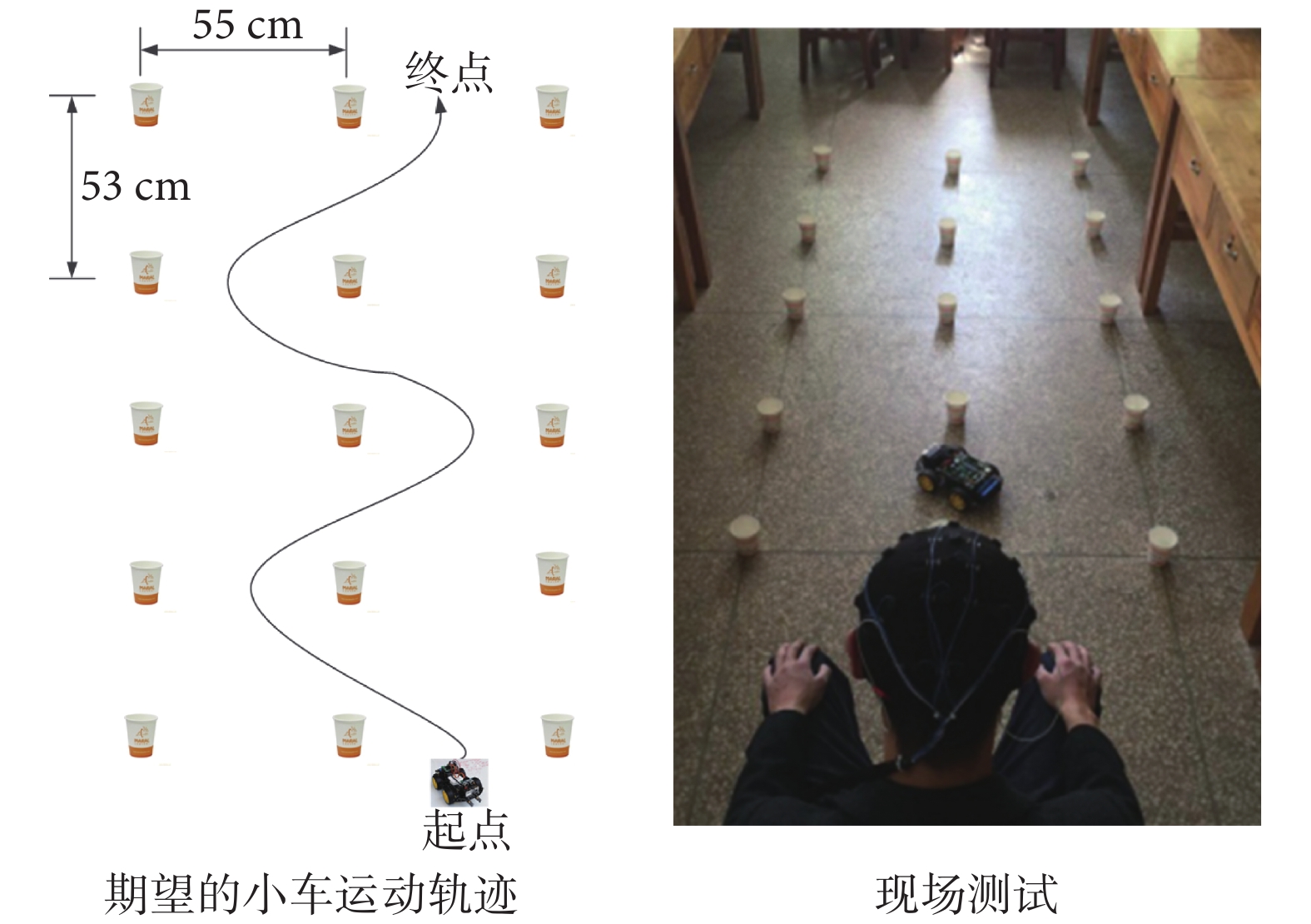 圖3
智能小車運動軌跡和現場測試
Figure3.
Movement trajectory and field test of intelligent car
圖3
智能小車運動軌跡和現場測試
Figure3.
Movement trajectory and field test of intelligent car
1.4 在線 EEG 信號處理
1.4.1 特征提取
本試驗在線實時 EEG 信號處理采用 MATLAB(V8.5,美國)實現。首先對數據進行 250 Hz 的降采樣和 8~30 Hz 的帶通濾波,提取出 MI 表現差異具有統計學意義的 μ 節律(8~13 Hz)和 β 節律(14~30 Hz)頻段[16-17]。由于 EEG 信號易受肌電、眼電信號等的干擾,本試驗中采用預處理效果較好的獨立成分分析對數據進行預處理[18]。
預處理后,采用基于伯格算法(burg algorithm)計算的功率譜密度(power spectral density,PSD)和基于 HHT 計算的平均能量特征相結合的方法[19-20],即 PSD-HHT 特征提取。
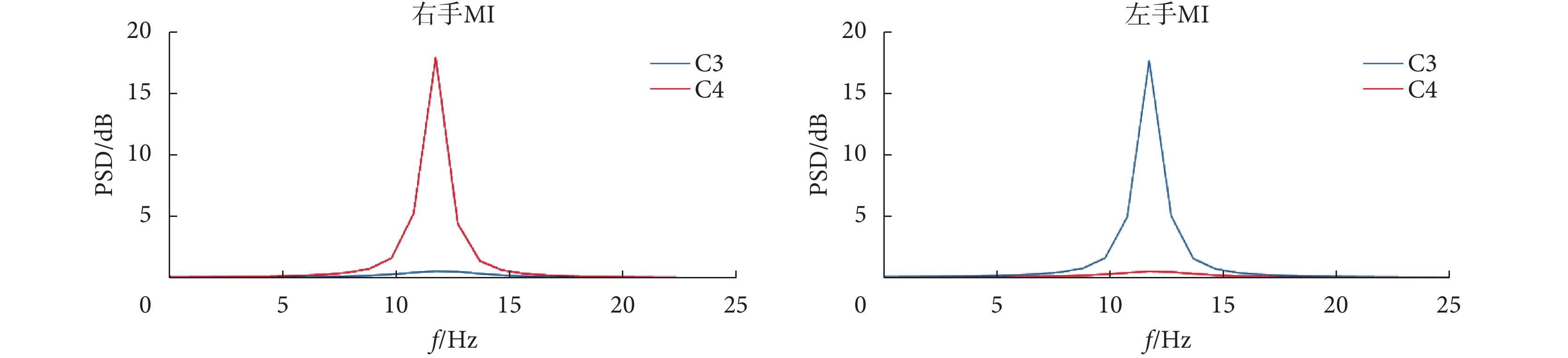
基于時間序列模型中的自回歸模型(auto regression model,AR)的功率譜估計是現代譜估計常用的一種方法,其中模型階次據經驗選取為 6。以受試者 S1 為例,左右手 MI 時典型的 PSD 曲線如圖 4 所示,ERD 和 ERS 現象清晰可見。然后提取出該頻段范圍的特征組成 10 維特征向量:(C3PSD1,
 ,C3PSD5,C4PSD1,
,C3PSD5,C4PSD1,
 ,C4PSD5)。
,C4PSD5)。
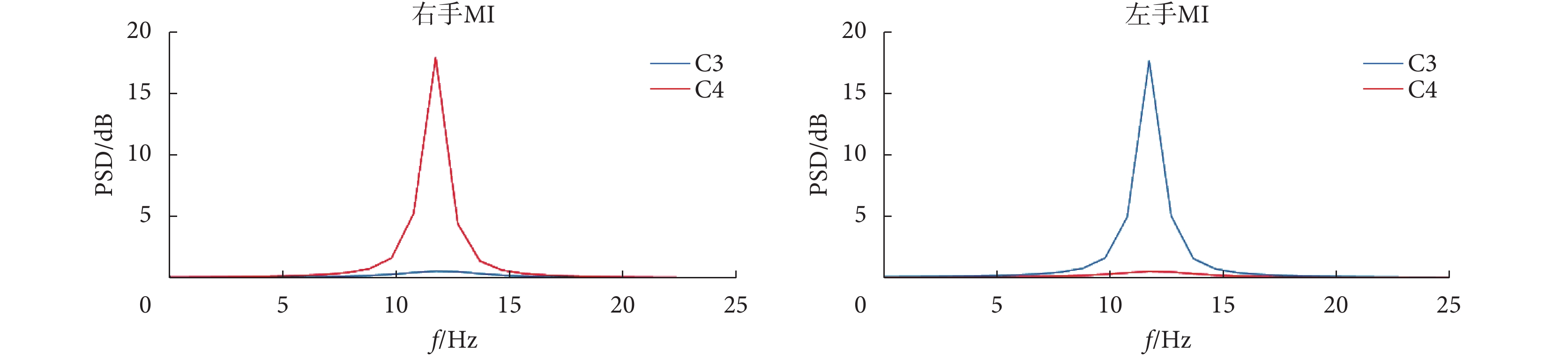 圖4
左右手 MI 的 AR 模型PSD曲線
Figure4.
PSD of AR model during imagined left and right hands movement
圖4
左右手 MI 的 AR 模型PSD曲線
Figure4.
PSD of AR model during imagined left and right hands movement
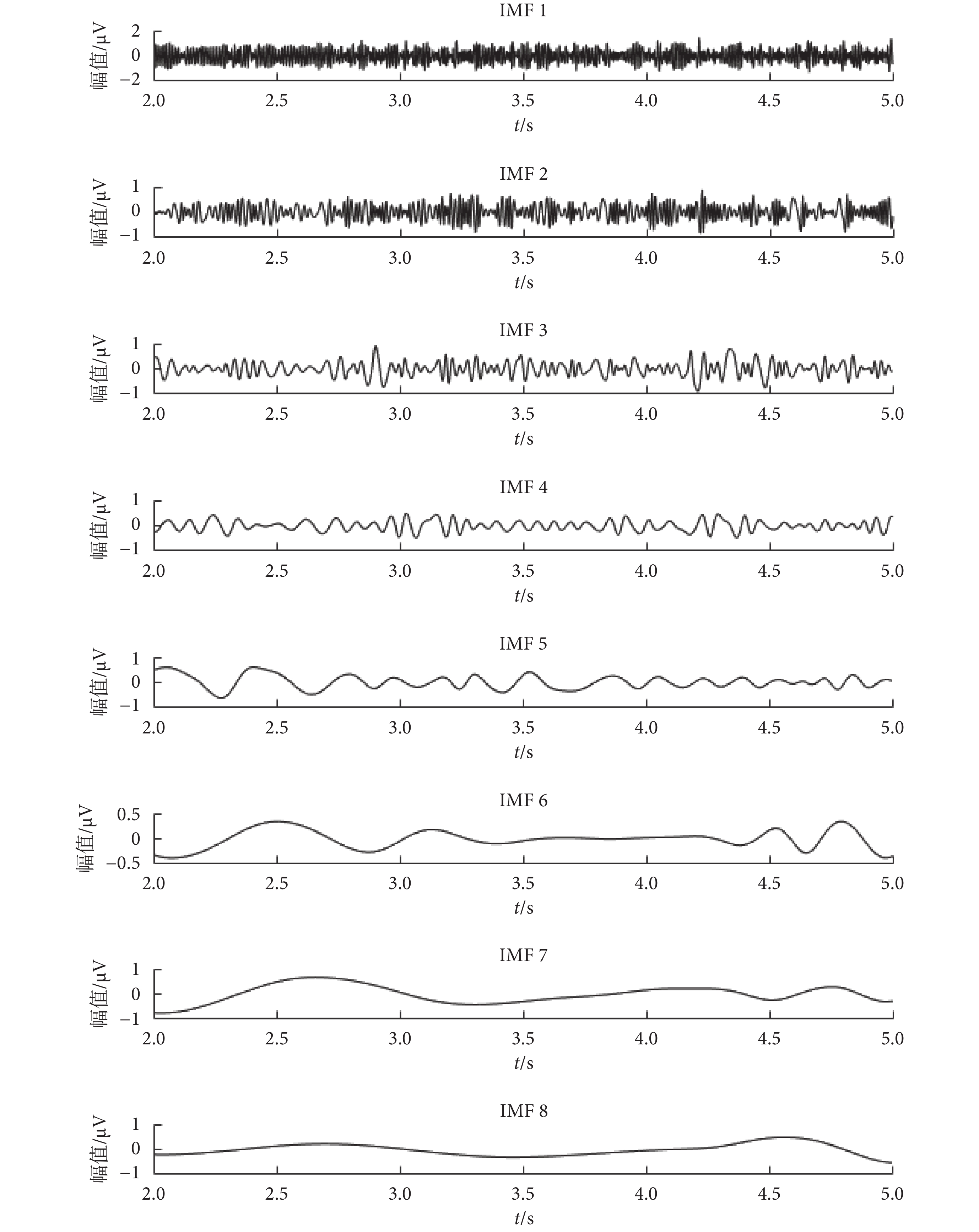
研究表明,HHT 在時域和頻域均具有較高的分辨率,能夠較好地適用于分析非線性非平穩 EEG 信號[21-22]。首先把 EEG 信號數據進行經驗模態分解(empirical mode decomposition,EMD),如圖 5 所示。接著選取對分類貢獻較大的前三階本征模函數(intrinsic mode function,IMF),若
 表示第 i 次篩選得到的 IMF 分量,可按式(1)對其進行希爾伯特譜分析(Hilbert spectrum analysis,HSA)得到
表示第 i 次篩選得到的 IMF 分量,可按式(1)對其進行希爾伯特譜分析(Hilbert spectrum analysis,HSA)得到
 ,然后由式(2)、式(3)分別求解析信號
,然后由式(2)、式(3)分別求解析信號
 和瞬時幅值
和瞬時幅值
 。
。
 |
 |
 |
根據式(4)求取通道 C 的平均瞬時能量(average instantaneous energy,AIE)值,以符號 AIECN 表示。
 |
其中 N 表示采樣點數目,Ci2 表示通道 C 第 i 個采樣點瞬時幅值的平方。AIECN 值借助于能量柱形圖的形式反饋給受試者。
在本研究中,由滑動窗口計算通道 C3 和 C4 的 C3HHT 和 C4HHT,組成 10 維特征向量:(C3HHT1,
 ,C3HHT5,C4HHT1,
,C3HHT5,C4HHT1,
 ,C4HHT5)。
,C4HHT5)。
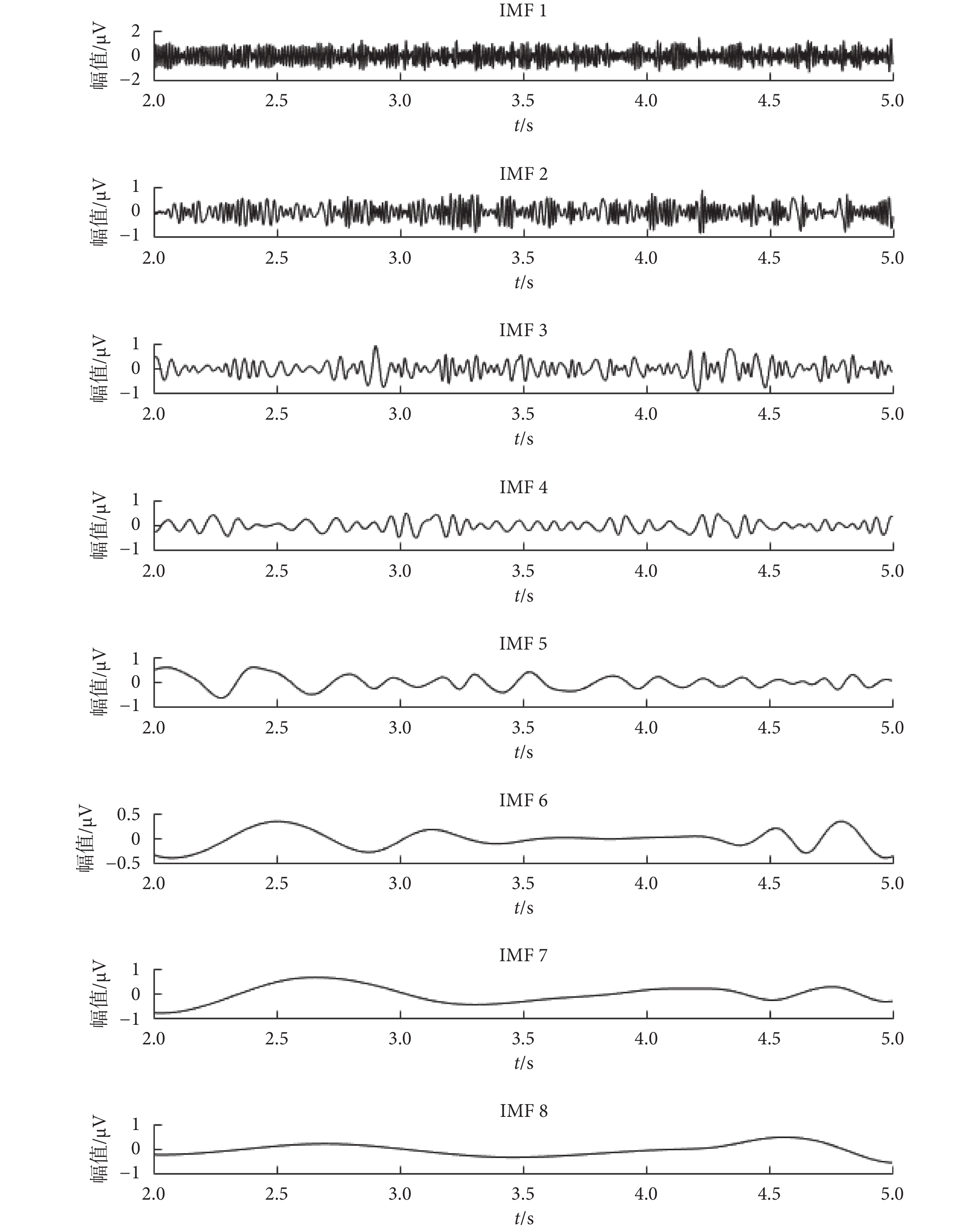 圖5
MI 誘發的 EEG 信號 EMD 后各階 IMF
Figure5.
Each order of IMF after EMD of EEG induced by MI
圖5
MI 誘發的 EEG 信號 EMD 后各階 IMF
Figure5.
Each order of IMF after EMD of EEG induced by MI
最后把 C3 和 C4 提取 PSD 形成的 10 維譜特征和 HHT 變換后計算的 10 維能量特征組合成 20 維的特征向量:(C3PSD1,
 ,C3PSD5,C4PSD1,
,C3PSD5,C4PSD1,
 ,C4PSD5,C3HHT1,
,C4PSD5,C3HHT1,
 ,C3HHT5,C4HHT1,
,C3HHT5,C4HHT1,
 ,C4HHT5) 。
,C4HHT5) 。
1.4.2 信號分類
本研究擬采用 ELM、SVM 及 LDA 三種分類器進行在線實時分類并通過投票確定最后的分類結果。三種分類器如下:
(1)ELM 是一種典型的單隱層前饋神經網絡,可以隨機初始化輸入權重和偏置并得到相應的輸出權重。在 ELM 算法中,輸出權值和偏差隨機給定后,隱層矩陣 H 變成一個確定的矩陣,前饋神經網絡的訓練可轉化為一個求解輸出權值矩陣的最小二乘范數解的問題。這一訓練過程等價于尋找線性系統 Hβ = T 的最小二乘解 β,如式(5)所示:
 |
其中 H 為該神經網絡的隱層輸出矩陣, β 為輸出神經元的權重矩陣,wi 為隨機輸入權重,bi 為隱層偏置,N 為相應的數目,T 為期望輸出。ELM 具有比反向傳播(back propagation,BP)神經網絡等傳統算法更少的參數設置、更低的計算復雜度、更快的計算速度,同時它又比傳統算法具有更高的函數逼近能力和泛化性能。
(2)運用 SVM 分類時,常遇到線性不可分的問題,可在約束條件中引入松弛變量,在目標函數中引入懲罰因子來解決,則分類優化問題可為:
 |
 |
其中 W 和 b 分別為分類超平面(W,b)的法向量和閾值;ξi ≥ 0,為松弛變量,用于衡量實際類別值 yi 與 SVM 輸出之間的距離;c 為懲罰因子,用于控制錯分類程度;xi 為樣本數據點,N 為訓練樣本集的大小。若低維空間向量集難于劃分,可將它們映射到高維空間,這種方法會帶來計算復雜度的增加,可采用核函數很好地解決這個問題。只要選用適當的核函數,可得到高維空間的分類函數,SVM 的關鍵在于核函數。在 SVM 方法中,采用不同的核函數將導致不同的 SVM 算法,本文核函數
 滿足默瑟(Mercer)條件且采用徑向基核函數,如式(8)所示。
滿足默瑟(Mercer)條件且采用徑向基核函數,如式(8)所示。
 |
其中 σ 為樣本數據映射到新的特征空間后的分布參數。
(3)LDA 是模式識別的經典算法,在類別屬性和類別數確定的條件下,可根據某一研究對象的各種特征值判別其類型歸屬問題的一種多變量統計分析方法。其思想是將高維的模式樣本投影到最佳鑒別矢量空間,以達到抽取分類信息和壓縮特征空間維數的效果,投影后確保模式樣本在新的子空間有最大的類間距離和最小的類內距離,即模式在該空間中有最佳的可分離性。根據判別標準不同,可分為費希爾(Fisher)判別、貝葉斯(Bayes)判別等。本研究采用 Fisher 準則函數:
 |
其中 W 為投影方向,
 和
和
 分別為樣本類間離散度矩陣和總的類內離散度矩陣。
分別為樣本類間離散度矩陣和總的類內離散度矩陣。
Fisher 判別亦稱典則判別,是根據線性 Fisher 函數值進行判別,使用此準則要求各組變量的均值差異具有統計學意義。該方法的基本思想是投影,即將原來空間的自變量組合投影到維度較低的空間去,然后再進行分類。投影的原則是使得每一類的差異盡可能小,而不同類間投影的距離差盡可能大。Fisher 判別的優勢在于對分布、方差等都沒有任何限制,應用范圍比較廣。
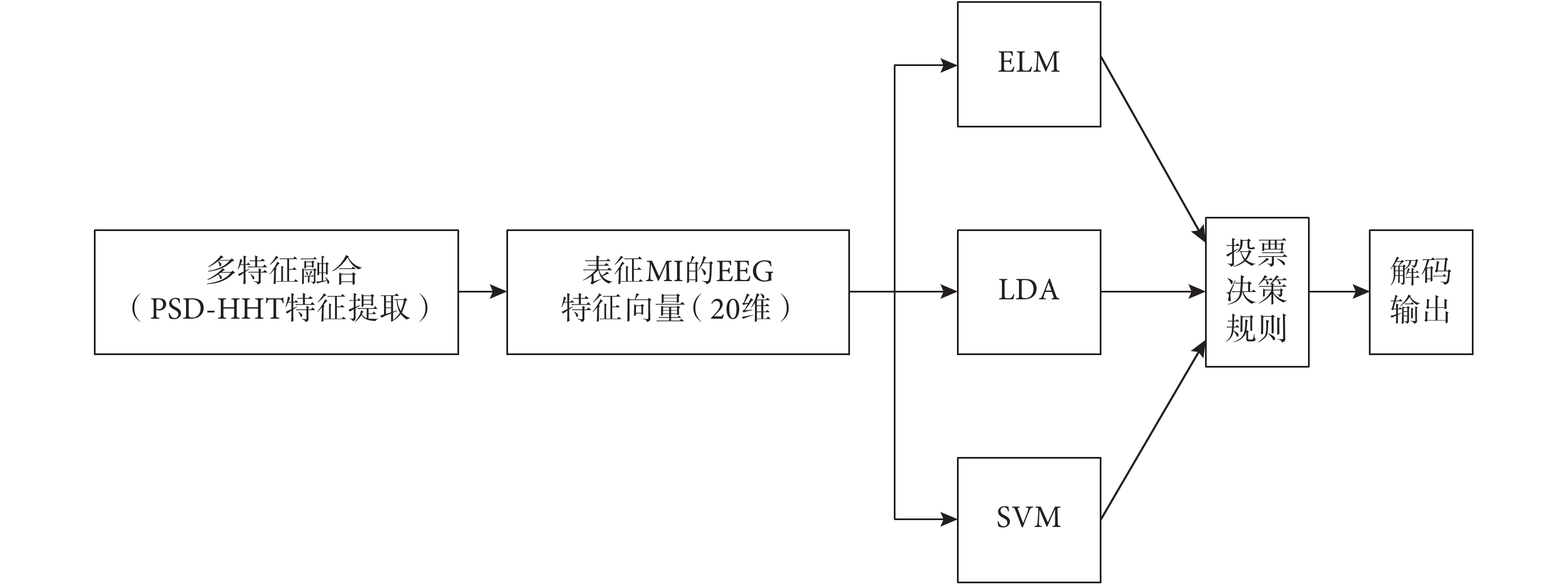
本研究采用多特征融合和多分類器投票決策,如圖 6 所示。需要說明的是當三個分類器分類輸出結果均不相同時,記為無效輸出,智能小車停止。
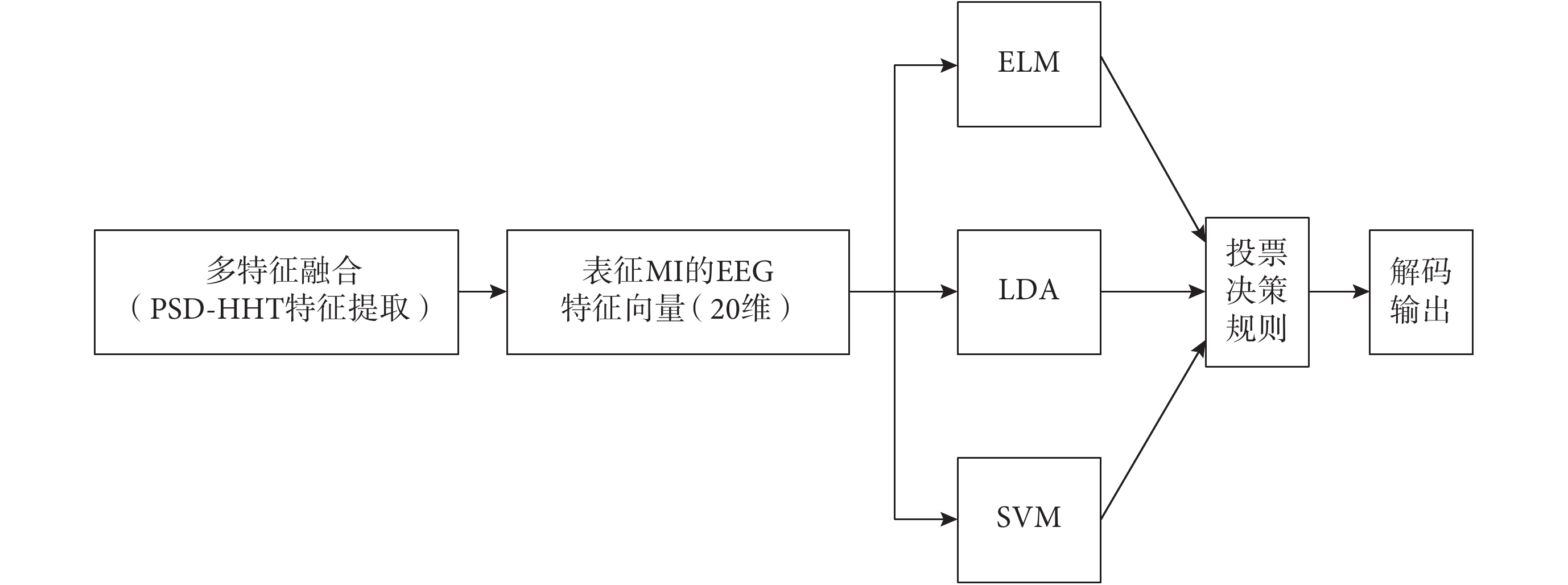 圖6
多特征融合和多分類器投票決策
Figure6.
Multi-feature fusion and multi-classifier voting decision
圖6
多特征融合和多分類器投票決策
Figure6.
Multi-feature fusion and multi-classifier voting decision
在線異步測試前,基于訓練數據通過 15 倍交叉驗證,根據分類準確率最高的原則,分別為 ELM、LDA 和 SVM 三個分類器訓練得出一個最佳模型。
2 結果
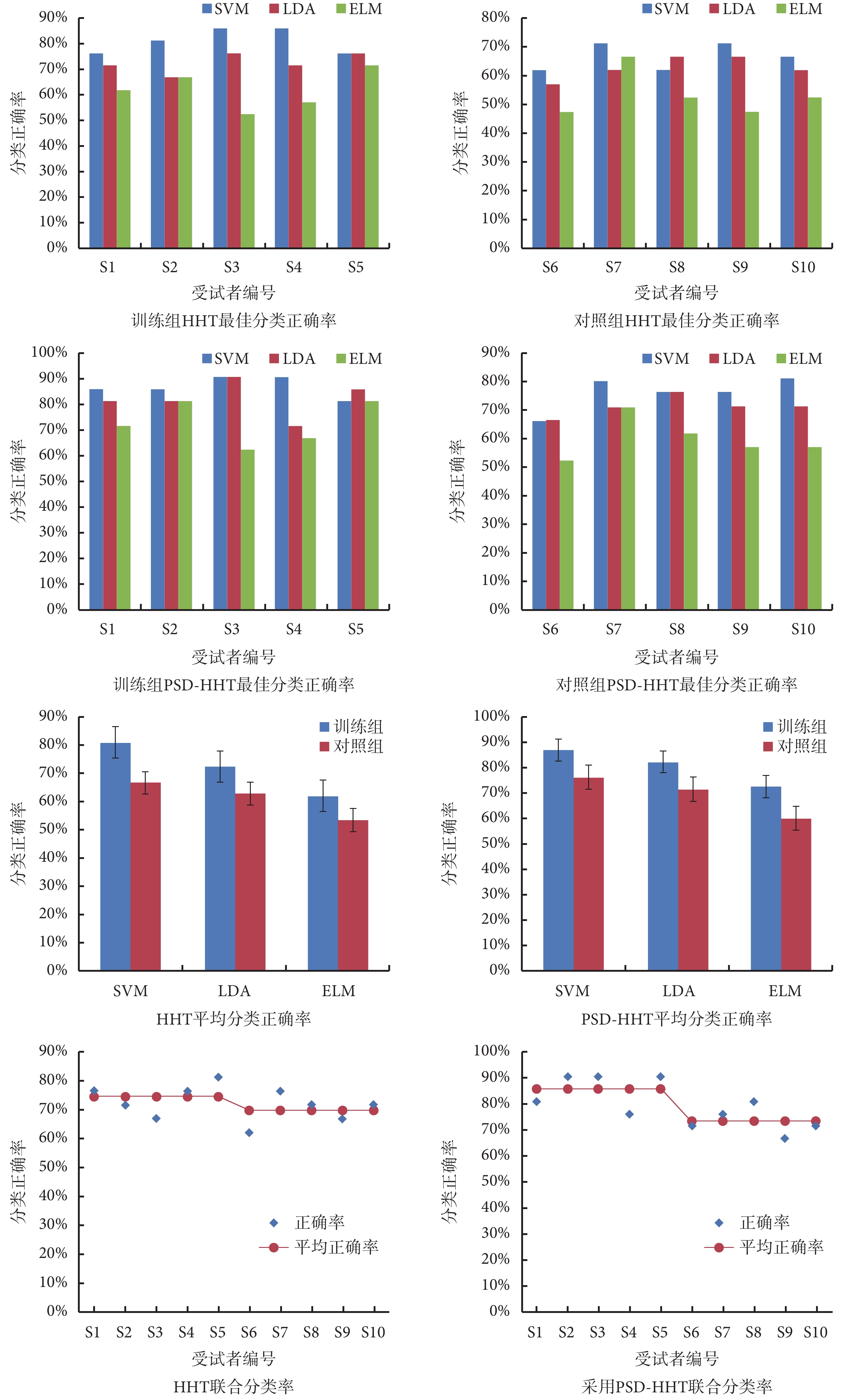
如圖 7 所示,呈現了 15 倍交叉驗證訓練數據得出的最佳分類率。10 名受試者按照 MI 誘發 EEG 信號采集范式進行 MI,采用滑動窗口提取想象時段每一秒的數據,每個受試者采集的數據組成 315 個測試。據試驗經驗,采用 15 倍交叉驗證,即把 315 次測試分成均等的 15 次試驗,每個部分包含了 21 次測試,把 15 次試驗中的 14 次試驗作為訓練集,其中一次試驗作為測試集來分類,這樣的操作會進行 15 次分類,最后選擇分類率高的數據作為訓練集。分別用 SVM、基于 Fisher 核的 LDA 和 ELM 分類,選擇每種分類器分類準確率最高時的模型作為測試模型。
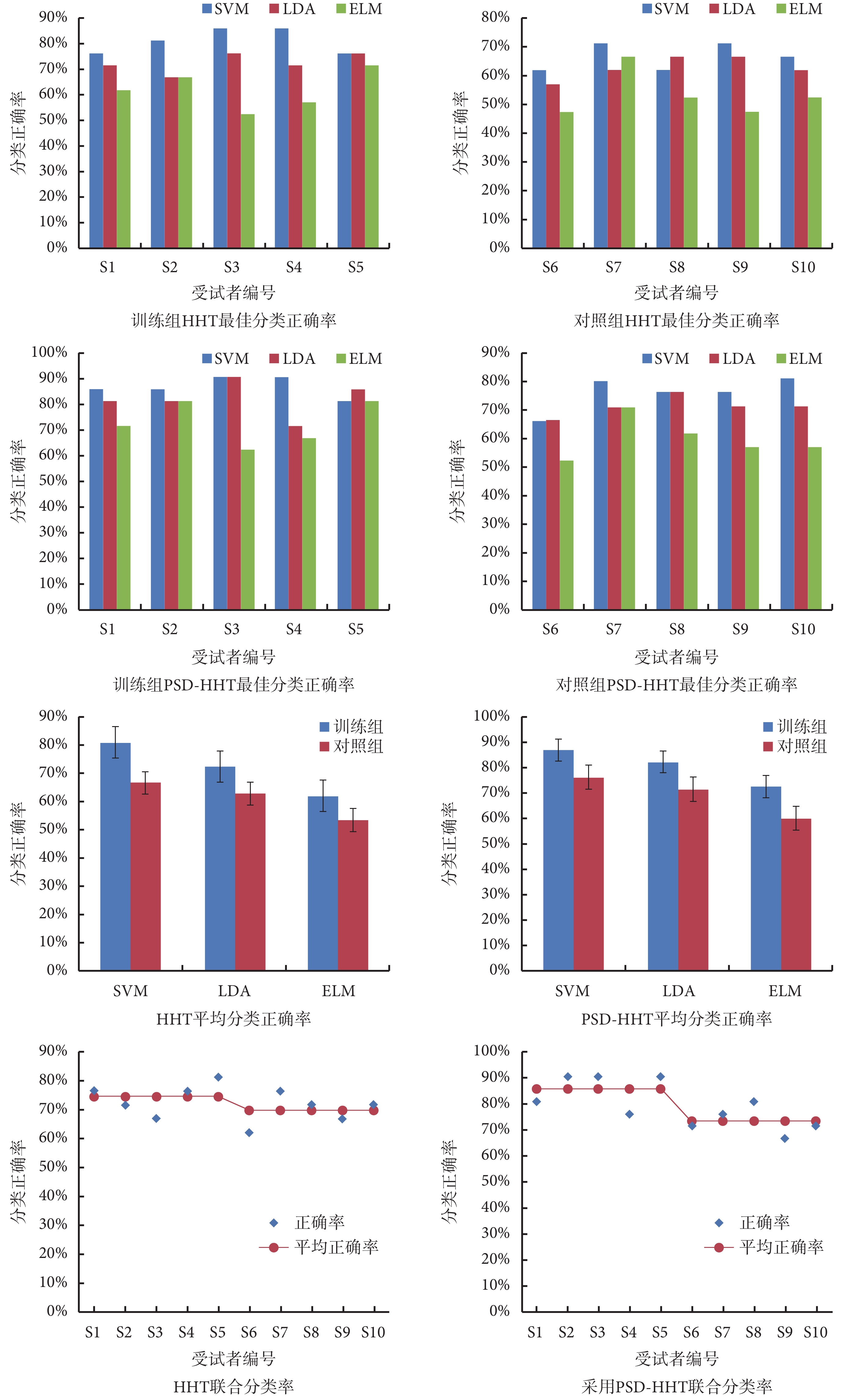 圖7
訓練組和對照組在 HHT、PSD-HHT 特征下三種分類器的分類率
Figure7.
The classification accuracy of three classifiers with HHT or PSD-HHT features for trained group and control group
圖7
訓練組和對照組在 HHT、PSD-HHT 特征下三種分類器的分類率
Figure7.
The classification accuracy of three classifiers with HHT or PSD-HHT features for trained group and control group
如圖 7 所示,第一排圖表示了僅采用 HHT 特征時,訓練組和對照組訓練最佳模型時三種分類器的分類率,可以看出訓練組的分類效果優于對照組。第二排圖表示了結合 PSD 和 HHT 特征(PSD-HHT)時,訓練組和對照組訓練最佳模型時三種分類器的分類率,訓練組的分類效果依然優于對照組,同時與第一排圖進行對比可以看出,對訓練組、對照組的數據分別采用 HHT 和 PSD-HHT 進行特征提取,結果表明 PSD-HHT 特征分類率有明顯提高。第三排圖表示采用 HHT 特征和 PSD-HHT 特征時,訓練三種分類器的平均分類率,結果表明訓練組的平均分類率均高于對照組。最后一排圖表示采用 HHT 特征和 PSD-HHT 特征時,三種分類器的聯合分類率,圖中平均正確率折線分別表示 S1~S5 的平均值和 S6~S10 的平均值,與第三排圖進行對比,結果表明三種分類器聯合決策在一定程度上優于單個分類器的分類結果。最后一張圖結果表明采用 PSD-HHT 特征時,訓練組的平均、最高和最低指令識別準確率分別為 85.71%、90.47% 和 76.19%,對照組對應的分別為 73.32%、80.95% 和 66.67%,表明了所設計的反饋訓練系統的有效性。
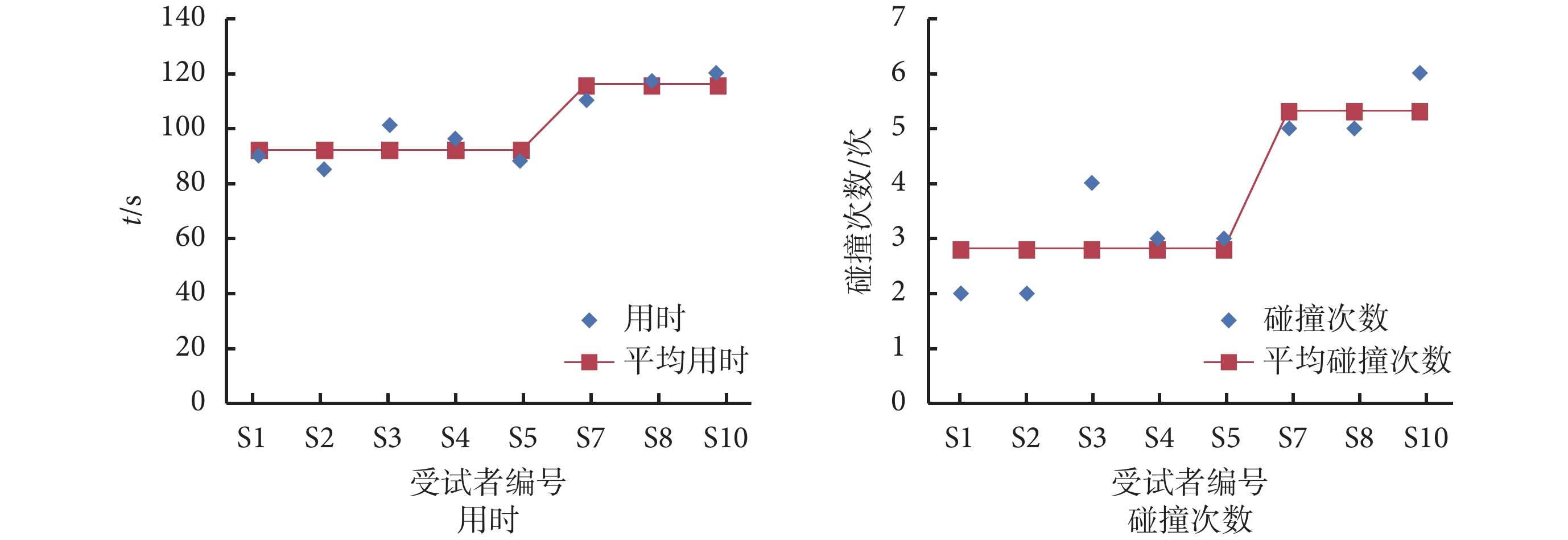
如圖 8 所示,PSD-HHT 特征融合,三種分類器聯合決策下訓練組和對照組分別按要求控制小車達到終點的用時(每名受試者)、平均用時(組內平均)、碰撞次數(每名受試者)以及平均碰撞次數(組內平均),其中 S6 和 S9 挑戰失敗(碰撞次數達到 6 次以上視為控制失敗)。圖中平均用時折線分別表示 S1~S5 的平均值和 S7、S8、S10 的平均值。訓練組平均、最高和最低用時分別為 92 s、101 s 和 85 s,對照組對應的分別為 115.7 s、120 s 和 110 s。訓練組的平均用時明顯低于對照組,其平均碰撞次數也明顯低于對照組。同時,采用 PSD-HHT 特征融合和三種分類器聯合決策,訓練組所有受試者均成功控制小車達到終點,而對照組受試者未經 NF 訓練,其中有兩名受試者控制失敗,有三名受試者成功控制小車達到終點,但耗時較長,觸碰次數較多。上述結果表明訓練組在分類正確率和控制小車的性能上都優于對照組,證明了基于 EEG 信號特征地形圖的異步實時 NF 的有效性,能夠幫助受試者(用戶)學會自主調節 MI 腦活動,最終使其 MI 誘發的 EEG 信號具有一定程度的可控性和可觀測性,現場測試表明了基于 EEG 信號 NF 控制智能小車方法的有效性。
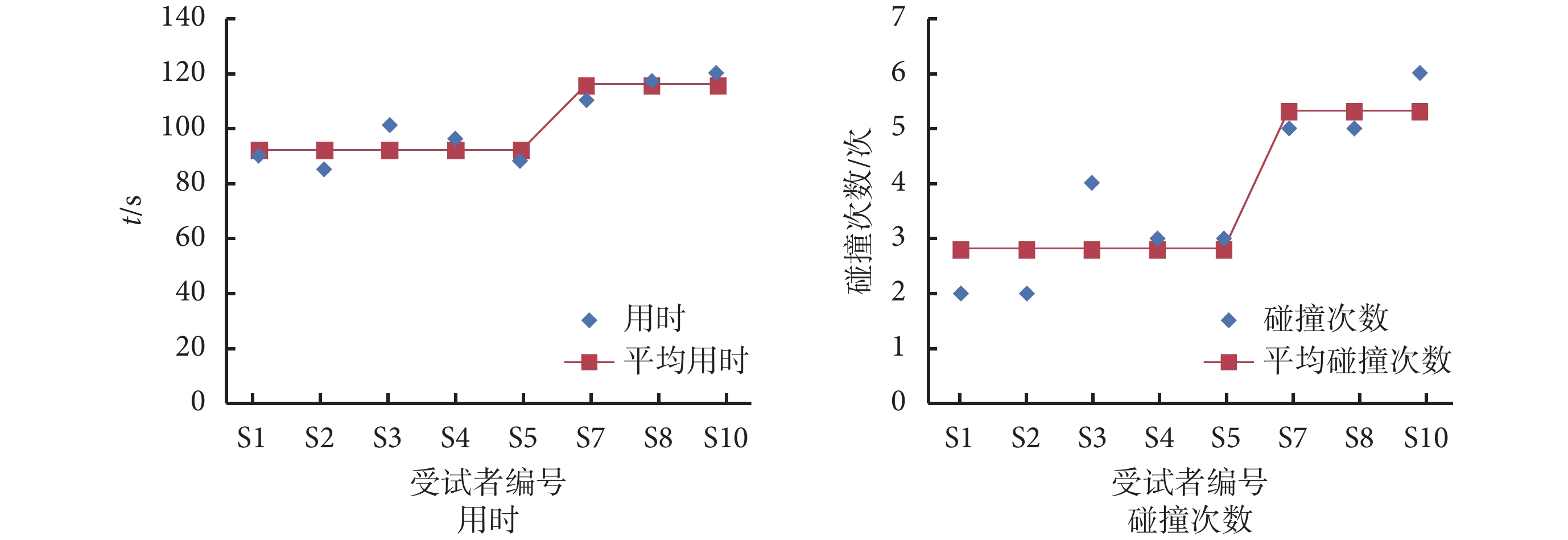 圖8
受試者控制智能小車達到終點的用時與碰撞次數
Figure8.
Time consuming and the number of collision for subjects to control the intelligent car to reach the end
圖8
受試者控制智能小車達到終點的用時與碰撞次數
Figure8.
Time consuming and the number of collision for subjects to control the intelligent car to reach the end
3 討論
BCI 是一種變革性的新型人機交互技術,它與機器人學相結合的直接 BCR 技術具有重要的科學意義和潛在的應用價值。在眾多直接 BCR 方式中,基于 MI 的直接 BCR 方法是一種重要的心想物移的自然方式[23]。然而,基于 MI 的直接 BCR 在邁向實用化的過程中還面臨著若干技術難題,如:目前尚缺乏讓受試者(用戶)樂意接受的便攜式系統;缺乏能夠高效促進受試者(用戶)訓練的方法或系統;難以提取表征不同 MI 模式之間差異具有統計學意義的 EEG 信號特征;尚需穩定、可靠和準確的解碼方法等問題。基于此,本研究嘗試解決后面三個問題。
針對基于 MI 的 BCR 存在的問題,本研究提出了基于 EEG 信號 NF 訓練受試者以利于受試者調節其腦活動;然后采用 PSD 和 HHT 相結合的 PSD-HHT 特征提取方法,提取表征 MI 模式的 EEG 信號特征;再結合 ELM、LDA 和 SVM 多分類器決策方法,提高分類的穩定性并降低錯誤分類帶來的風險;最后以每 200 ms 更新一次特征提取和分類,實現了對智能小車實時良好的控制。
Xia 等[24]研究提出適當的訓練可以幫助受試者熟練地調節自己的心理活動,他們根據受試者想象過程中的強度變化以視覺反饋的形式來同步訓練受試者,即以條形圖填充的高度不同,顏色也隨之變化的方法來反饋給受試者,訓練 7 天后,取得 80% 的平均分類率。但是該研究訓練受試者時間長,且測試沒有實際控制對象,與之相比,本研究采用異步實時 NF 的方式來訓練受試者,訓練后可以成功地控制小車。kus 等[25]采用 EEG 信號控制光標的 NF 訓練系統,測試時控制虛擬光標箭頭左旋轉或右旋轉 90° 到達規定的終點,與本研究相比,該類研究也屬于虛擬控制,其在自適應調節分類器參數以適應受試者方面取得了一定進展。Lee 等[26]采用視覺和聽覺提示相結合的 NF,取得了一定的效果,但沒有實際用于控制對象,與之相比,本研究實際腦控小車具有可觀測性。本試驗結果表明,所提出的基于 EEG 信號特征能量柱形圖的異步實時 NF 方法有助于受試者操控基于 MI 的 BCI 控制系統,可望為后續研發實用的 BCR 系統提供借鑒。
Kreilinger 等[27]在基于 SSVEPs EEG 信號反饋控制小車的研究中,研究了基于視覺反饋背景的在黑色、靜態現場背景和動態現場背景下的控制效果,動態現場背景下的控制效果在他們提出的訓練受試者的方法之后,控制效果有所改善,但相比本研究基于 MI 的 EEG 信號反饋控制,不存在視覺刺激背景的影響。但這種動態的環境變化是否會影響受試者進行 MI,這是一個很值得研究的方向。Lee 等[28]在基于 SSVEPs EEG 信號反饋控制小車的研究中只采用了一個電極 Oz,進行 SSVEPs 控制小車按規定軌跡運動,與本文相比較,雖采用的 EEG 信號控制機制不一樣,但其所采用的針對單通道 EEG 信號的解碼算法值得借鑒。Shu 等[29]在基于 MI 的 EEG 信號反饋控制虛擬小車中引入誤差電位的新方法,使其在 BCI 應用中成為一種可靠的監控工具,而這將是課題組今后在研究 EEG 信號反饋控制實際小車中的一個重要工具。
有研究表明,HHT 在時域和頻域比小波變換等方法具有更高的分辨率[22],利用其提取能量特征有助于提高分類率。此外,根據本文圖 4 結果可以表明,PSD 可以清晰地表征 ERD 和 ERS 現象,因此可選擇 ERD 和 ERS 現象明顯的頻帶信息與 HHT 能量特征融合。圖 7 的結果進一步表明 HHT 和 PSD 特征相融合有助于提高分類率。
近年來,多個分類器組合應用到 EEG 信號分類中較少,本文嘗試多個分類器組合并基于投票規則輸出指令。本文圖 7 第三排圖即表明了 ELM、LDA 和 SVM 三個分類器聯合決策輸出控制指令的可行性,可增加分類的穩定性降低分類錯誤帶來的控制風險。盡管如此,本試驗中 ELM 的分類性能仍需要進一步提高,在今后的算法研究中,需要優化每個獨立分類器的性能,從而增大組合決策輸出的可靠性。
4 結束語
本文針對直接 BCR 技術中 EEG 信號 NF 訓練受試者及調節腦活動、心理活動的 EEG 信號特征表示及其解碼展開研究,聚焦基于 MI 誘發的 EEG 信號的 BCI 控制智能小車。通過訓練組和對照組研究了采用 EEG 信號特征地形圖的異步實時 NF 方法,PSD-HHT 特征融合,ELM、LDA、SVM 多分類器決策在腦控智能小車中的有效性。結果表明,所提 EEG 信號 NF 方法能夠有效訓練受試者并調節其腦活動,能夠提高腦控性能;多特征融合和多分類器決策也能夠改善腦控性能。本研究可望為后續基于 MI 誘發的 EEG 信號 NF 控制智能機器人的研究提供思路。
反饋是控制的精髓,也是直接 BCR 技術的精髓,尤其是基于 MI 腦控的精髓和關鍵技術,故我們未來的研究方向可擬定為:① 進一步優化 MI 誘發的 EEG 信號 NF 技術并試圖建立數學模型進行分析和設計,期望獲得最優化的可視化 NF 技術,讓受試者(用戶)更輕松地訓練和學習,縮短訓練時間并提高訓練效果;② 在本研究的基礎上,我們也將針對基于 MI 誘發的 EEG 信號的 BCI 控制智能機器人,進一步優化 MI 誘發的 EEG 信號特征提取和分類算法,探索自適應 EEG 信號處理、自適應特征提取和自適應模式分類算法。
引言
腦-機交互(brain-computer interaction,BCI)是一種新型的人機交互技術,不依賴于(繞過)大腦外周神經和肌肉的參與,而是利用中樞神經系統感知或認知思維活動誘發的腦電(electroencephalogram,EEG)信號經由采集系統獲取后并解碼感知思維意圖,從而將腦活動信息轉化為控制信號,實現大腦直接與外部設備進行通信或控制[1-3]。BCI 在機器人領域的一個重要應用是腦控機器人(brain-controlled robot,BCR),其中一類 BCR 的方法是基于運動想象(motor imagery,MI)誘發的 EEG 信號的 BCI。
基于 MI 的 BCI 系統是由受試者(用戶)自主心理活動誘發的 EEG 信號來驅動,有別于由外部刺激受試者(用戶)產生 EEG 信號驅動的反應式 BCI 系統以及僅監測受試者腦狀態或神經生理信號變化的被動式 BCI 系統[4-5]。雖然 MI 的 BCI 系統沒有受到由于外部刺激對受試者(用戶)產生的負面影響,然而僅憑受試者(用戶)自主心理活動難以實現可控性和顯示的可觀測性,這給該類 BCI 系統走向實用化設置了極大的障礙[6-7]。近些年來,雖然研究者在解析 MI 模式的算法方面不斷創新,但其性能依然難有大的提高,且存在較多無效受試者(即國際公認的系統操作識別率低于 70% 的“BCI 盲”)等關鍵性問題[8]。其原因是對于 MI 范式的 BCI 系統,不少受試者(用戶)很難快速有效地產生驅動該類 BCI 所需的控制信號。受試者(用戶)學會自主產生并調節事件相關去同步(event-related desynchronization,ERD)信號和事件相關同步(event-related synchronization,ERS)信號對提高系統的性能十分關鍵[9-11]。因此,高效訓練受試者(用戶)MI 的方法或系統是該類 BCI 系統得以實際運用的關鍵技術之一,已成為一個重要的突破點。Neuper 等[12-13]采用 EEG 信號控制滾動條的移動作為神經反饋(neurofeedback,NF)信號,來提高左右手 MI 誘發的 EEG 信號,訓練前后的結果差異具有統計學意義;Yu 等[14]提出了一種 MI 和穩態視覺誘發電位(steady-state visually evoked potentials,SSVEPs)混合模式的 BCI NF,在一定程度上提高了 MI 訓練效果;Hwang 等[15]采用實時同步 EEG 能量地形圖作為 NF,對受試者進行訓練后分類效果有一定的提高。這些 NF 方法中,大多采用的是同步反饋,即受試者根據計算機提示執行任務,采集系統會根據不同任務采集的數據打上相應的同步標記并根據標記處理數據;還有一些采用的是異步反饋(即受試者在無計算機提示的情況下,按自主意愿執行任務,采集系統不會打同步標記),但其反饋大都缺乏優化。本研究擬探索優化的 NF 方法,因此提出了一種基于 EEG 信號特征能量柱形圖的異步實時 NF 控制方法,通過幫助受試者(用戶)學習自主調節 MI 的腦活動,使其對 MI 誘發的 EEG 信號具有一定程度的可控性和可觀測性,最終實現控制智能小車并進行相關測試。
除了上述 MI 心理活動的可控性和可觀測性問題外,目前 MI 模式的解碼精度、穩定性和可靠性并不高,一個主要原因是 MI 誘發的 EEG 信號特征具有變異性。為此,構建可分性好的 MI 誘發的 EEG 信號特征向量依然是一個問題。此外,傳統分類 MI 誘發的 EEG 信號特征向量主要采用單一的分類器決策,這可能增加錯分類的風險。由于單分類器的推廣能力有限,可考慮多分類器聯合決策,降低錯誤決策后帶來的控制風險。本研究擬采用希爾伯特-黃變換(hilbert-huang transform,HHT)和功率譜密度相結合作為 EEG 信號特征向量,并以極限學習機(extreme learning machine,ELM)、線性判別分析(linear discriminant analysis,LDA)和支持向量機(support vector machine,SVM)聯合決策分類的方法,以期達到提高解碼結果可靠性,提高指令識別準確率的目的,可望為后續基于 MI 誘發的 EEG 信號 NF 控制智能機器人的開發提供思路。
1 材料和方法
1.1 受試者、EEG 信號采集設備及參數
1.1.1 受試者
10 名受試者(招募自昆明理工大學,隨機確定編號為:S1~S10),8 名男性和 2 名女性,年齡范圍在 20~26 歲,本科以上學歷。按編號分為訓練組(S1~S5,試驗前接受設計的在線 NF 異步系統訓練)與對照組(S6~S10,不接受訓練)。所有受試者身體健康,無感覺運動疾病和心理病史。均為自愿參與 EEG 信號數據采集、MI 能力訓練、分類模型訓練并在線測試控制智能小車試驗。本研究由昆明理工大學倫理道德委員會批準,每個受試者在試驗前簽署了試驗研究知情同意書。
1.1.2 EEG 信號采集設備及參數
本次試驗的 EEG 信號采集設備為 16 導聯的 EEG 信號放大器(Mipower-UC,EEG Collection_V2,清華大學神經工程實驗室)。該設備參數如下:采樣頻率1 000 Hz,24 位模/數轉換,信號頻帶為 0~250 Hz,輸入信號范圍是 ± 200 mV,同步事件輸入為 8 位輸入,無工頻陷波。根據國際標準的 10–20 系統定制電極帽(Ag-AgCl 粉末電極,武漢格林泰克科技有限公司)。本研究僅用位于左右初級感覺運動功能區的 C3 和 C4 電極作為記錄電極,額極中點(Fpz)為接地電極,左側乳突(M1)為參考電極。試驗要求所有電極的阻抗小于 5 kΩ,并保持穩定。
1.2 在線 NF 異步訓練
在基于 MI 誘發的 EEG 信號的 BCI 系統中,快速有效地使受試者(用戶)在不同 MI 模式之間產生差異具有統計學意義的 EEG 信號特征(如 ERD/ERS),是該類 BCI 系統走向實用化的關鍵之一。本文采用能量柱形圖設計了在線 NF 異步訓練系統,受試者以自定節奏執行 MI 心理活動,該系統可計算功率譜密度以能量柱形圖的形式實時呈現初級感覺運動區 EEG 信號特征變化情況。試驗時,受試者首先根據指導語熟悉左右手 MI 誘發的 EEG 信號特征的變化規律,如圖 1 所示。訓練組在試驗中可以借助于屏幕呈現的能量柱形圖來不斷熟悉并掌握 MI 的方法和技能,從而尋找自身最為有效的 MI 方式,這有助于在正式試驗時,能夠快速、準確地進行相應的 MI;而對照組不參與此系統的訓練,則有可能在 MI 的熟悉程度及自動 MI 能力方面會有所局限。
圖1
在線 NF 異步訓練范式
Figure1.
Online NF asynchronous training paradigm
1.3 在線異步控制智能小車
1.3.1 控制策略
在本研究中,要求受試者按照規劃的路線控制小車順利到達終點。為了完成任務,系統可控制小車以低速(3.75 cm/指令)直行、左轉[15°/指令]和右轉[15°/指令]運行。系統采用時間窗的方法,窗長為 1 000 ms,每隔 200 ms 對時間窗中 1 000 ms 的數據進行分析并更新一次控制指令。智能小車采用位置控制,即一個指令移動 3.75 cm,2 s 內可發出 5 個指令,則 2 s 內小車可移動 18.75 cm,每秒小車的移動距離為 9.375 cm,故小車的速度能達到 9.375 cm/s。如表 1 所示,受試者想象左手運動控制小車低速左轉,想象右手運動控制小車低速右轉,空閑狀態控制小車恒速前進。
1.3.2 訓練分類模型
用于訓練分類模型的 MI 誘發的 EEG 信號采集范式如圖 2 所示。0~1.5 s 為準備階段(顯示“+”號);1.5~3 s 為提示指令階段(呈現笑臉、左箭頭或右箭頭);3~8 s 為受試者 MI 階段(顯示“*”號);8 s 后屏幕空白顯示,為受試者休息時間。信號采集過程中,受試者按提示箭頭想象左右手運動,笑臉提示受試者不做任何 MI,即空閑狀態,每個測試的想象時間為 5 s,之后有 6~8 s 的休息時間。在線異步測試時,每隔 200 ms 利用時間窗前 1 000 ms 的數據提取特征并分類,即每 200 ms 輸出一個控制指令控制智能小車的運行狀態。
圖2
MI 誘發的 EEG 信號采集范式
Figure2.
Paradigm of EEG acquisition for MI
1.3.3 在線異步測試
本試驗要求受試者控制智能小車按指定軌跡到達終點,如圖 3 所示。試驗過程中,由輔助人員分別記錄每名受試者控制小車達到終點的用時及碰撞次數,結束后計算出每組的平均用時(即訓練組和對照組分開計算)。
圖3
智能小車運動軌跡和現場測試
Figure3.
Movement trajectory and field test of intelligent car
1.4 在線 EEG 信號處理
1.4.1 特征提取
本試驗在線實時 EEG 信號處理采用 MATLAB(V8.5,美國)實現。首先對數據進行 250 Hz 的降采樣和 8~30 Hz 的帶通濾波,提取出 MI 表現差異具有統計學意義的 μ 節律(8~13 Hz)和 β 節律(14~30 Hz)頻段[16-17]。由于 EEG 信號易受肌電、眼電信號等的干擾,本試驗中采用預處理效果較好的獨立成分分析對數據進行預處理[18]。
預處理后,采用基于伯格算法(burg algorithm)計算的功率譜密度(power spectral density,PSD)和基于 HHT 計算的平均能量特征相結合的方法[19-20],即 PSD-HHT 特征提取。
基于時間序列模型中的自回歸模型(auto regression model,AR)的功率譜估計是現代譜估計常用的一種方法,其中模型階次據經驗選取為 6。以受試者 S1 為例,左右手 MI 時典型的 PSD 曲線如圖 4 所示,ERD 和 ERS 現象清晰可見。然后提取出該頻段范圍的特征組成 10 維特征向量:(C3PSD1,
,C3PSD5,C4PSD1,
,C4PSD5)。
圖4
左右手 MI 的 AR 模型PSD曲線
Figure4.
PSD of AR model during imagined left and right hands movement
研究表明,HHT 在時域和頻域均具有較高的分辨率,能夠較好地適用于分析非線性非平穩 EEG 信號[21-22]。首先把 EEG 信號數據進行經驗模態分解(empirical mode decomposition,EMD),如圖 5 所示。接著選取對分類貢獻較大的前三階本征模函數(intrinsic mode function,IMF),若
表示第 i 次篩選得到的 IMF 分量,可按式(1)對其進行希爾伯特譜分析(Hilbert spectrum analysis,HSA)得到
,然后由式(2)、式(3)分別求解析信號
和瞬時幅值
。
|
|
|
根據式(4)求取通道 C 的平均瞬時能量(average instantaneous energy,AIE)值,以符號 AIECN 表示。
|
其中 N 表示采樣點數目,Ci2 表示通道 C 第 i 個采樣點瞬時幅值的平方。AIECN 值借助于能量柱形圖的形式反饋給受試者。
在本研究中,由滑動窗口計算通道 C3 和 C4 的 C3HHT 和 C4HHT,組成 10 維特征向量:(C3HHT1,
,C3HHT5,C4HHT1,
,C4HHT5)。
圖5
MI 誘發的 EEG 信號 EMD 后各階 IMF
Figure5.
Each order of IMF after EMD of EEG induced by MI
最后把 C3 和 C4 提取 PSD 形成的 10 維譜特征和 HHT 變換后計算的 10 維能量特征組合成 20 維的特征向量:(C3PSD1,
,C3PSD5,C4PSD1,
,C4PSD5,C3HHT1,
,C3HHT5,C4HHT1,
,C4HHT5) 。
1.4.2 信號分類
本研究擬采用 ELM、SVM 及 LDA 三種分類器進行在線實時分類并通過投票確定最后的分類結果。三種分類器如下:
(1)ELM 是一種典型的單隱層前饋神經網絡,可以隨機初始化輸入權重和偏置并得到相應的輸出權重。在 ELM 算法中,輸出權值和偏差隨機給定后,隱層矩陣 H 變成一個確定的矩陣,前饋神經網絡的訓練可轉化為一個求解輸出權值矩陣的最小二乘范數解的問題。這一訓練過程等價于尋找線性系統 Hβ = T 的最小二乘解 β,如式(5)所示:
|
其中 H 為該神經網絡的隱層輸出矩陣, β 為輸出神經元的權重矩陣,wi 為隨機輸入權重,bi 為隱層偏置,N 為相應的數目,T 為期望輸出。ELM 具有比反向傳播(back propagation,BP)神經網絡等傳統算法更少的參數設置、更低的計算復雜度、更快的計算速度,同時它又比傳統算法具有更高的函數逼近能力和泛化性能。
(2)運用 SVM 分類時,常遇到線性不可分的問題,可在約束條件中引入松弛變量,在目標函數中引入懲罰因子來解決,則分類優化問題可為:
|
|
其中 W 和 b 分別為分類超平面(W,b)的法向量和閾值;ξi ≥ 0,為松弛變量,用于衡量實際類別值 yi 與 SVM 輸出之間的距離;c 為懲罰因子,用于控制錯分類程度;xi 為樣本數據點,N 為訓練樣本集的大小。若低維空間向量集難于劃分,可將它們映射到高維空間,這種方法會帶來計算復雜度的增加,可采用核函數很好地解決這個問題。只要選用適當的核函數,可得到高維空間的分類函數,SVM 的關鍵在于核函數。在 SVM 方法中,采用不同的核函數將導致不同的 SVM 算法,本文核函數
滿足默瑟(Mercer)條件且采用徑向基核函數,如式(8)所示。
|
其中 σ 為樣本數據映射到新的特征空間后的分布參數。
(3)LDA 是模式識別的經典算法,在類別屬性和類別數確定的條件下,可根據某一研究對象的各種特征值判別其類型歸屬問題的一種多變量統計分析方法。其思想是將高維的模式樣本投影到最佳鑒別矢量空間,以達到抽取分類信息和壓縮特征空間維數的效果,投影后確保模式樣本在新的子空間有最大的類間距離和最小的類內距離,即模式在該空間中有最佳的可分離性。根據判別標準不同,可分為費希爾(Fisher)判別、貝葉斯(Bayes)判別等。本研究采用 Fisher 準則函數:
|
其中 W 為投影方向,
和
分別為樣本類間離散度矩陣和總的類內離散度矩陣。
Fisher 判別亦稱典則判別,是根據線性 Fisher 函數值進行判別,使用此準則要求各組變量的均值差異具有統計學意義。該方法的基本思想是投影,即將原來空間的自變量組合投影到維度較低的空間去,然后再進行分類。投影的原則是使得每一類的差異盡可能小,而不同類間投影的距離差盡可能大。Fisher 判別的優勢在于對分布、方差等都沒有任何限制,應用范圍比較廣。
本研究采用多特征融合和多分類器投票決策,如圖 6 所示。需要說明的是當三個分類器分類輸出結果均不相同時,記為無效輸出,智能小車停止。
圖6
多特征融合和多分類器投票決策
Figure6.
Multi-feature fusion and multi-classifier voting decision
在線異步測試前,基于訓練數據通過 15 倍交叉驗證,根據分類準確率最高的原則,分別為 ELM、LDA 和 SVM 三個分類器訓練得出一個最佳模型。
2 結果
如圖 7 所示,呈現了 15 倍交叉驗證訓練數據得出的最佳分類率。10 名受試者按照 MI 誘發 EEG 信號采集范式進行 MI,采用滑動窗口提取想象時段每一秒的數據,每個受試者采集的數據組成 315 個測試。據試驗經驗,采用 15 倍交叉驗證,即把 315 次測試分成均等的 15 次試驗,每個部分包含了 21 次測試,把 15 次試驗中的 14 次試驗作為訓練集,其中一次試驗作為測試集來分類,這樣的操作會進行 15 次分類,最后選擇分類率高的數據作為訓練集。分別用 SVM、基于 Fisher 核的 LDA 和 ELM 分類,選擇每種分類器分類準確率最高時的模型作為測試模型。
圖7
訓練組和對照組在 HHT、PSD-HHT 特征下三種分類器的分類率
Figure7.
The classification accuracy of three classifiers with HHT or PSD-HHT features for trained group and control group
如圖 7 所示,第一排圖表示了僅采用 HHT 特征時,訓練組和對照組訓練最佳模型時三種分類器的分類率,可以看出訓練組的分類效果優于對照組。第二排圖表示了結合 PSD 和 HHT 特征(PSD-HHT)時,訓練組和對照組訓練最佳模型時三種分類器的分類率,訓練組的分類效果依然優于對照組,同時與第一排圖進行對比可以看出,對訓練組、對照組的數據分別采用 HHT 和 PSD-HHT 進行特征提取,結果表明 PSD-HHT 特征分類率有明顯提高。第三排圖表示采用 HHT 特征和 PSD-HHT 特征時,訓練三種分類器的平均分類率,結果表明訓練組的平均分類率均高于對照組。最后一排圖表示采用 HHT 特征和 PSD-HHT 特征時,三種分類器的聯合分類率,圖中平均正確率折線分別表示 S1~S5 的平均值和 S6~S10 的平均值,與第三排圖進行對比,結果表明三種分類器聯合決策在一定程度上優于單個分類器的分類結果。最后一張圖結果表明采用 PSD-HHT 特征時,訓練組的平均、最高和最低指令識別準確率分別為 85.71%、90.47% 和 76.19%,對照組對應的分別為 73.32%、80.95% 和 66.67%,表明了所設計的反饋訓練系統的有效性。
如圖 8 所示,PSD-HHT 特征融合,三種分類器聯合決策下訓練組和對照組分別按要求控制小車達到終點的用時(每名受試者)、平均用時(組內平均)、碰撞次數(每名受試者)以及平均碰撞次數(組內平均),其中 S6 和 S9 挑戰失敗(碰撞次數達到 6 次以上視為控制失敗)。圖中平均用時折線分別表示 S1~S5 的平均值和 S7、S8、S10 的平均值。訓練組平均、最高和最低用時分別為 92 s、101 s 和 85 s,對照組對應的分別為 115.7 s、120 s 和 110 s。訓練組的平均用時明顯低于對照組,其平均碰撞次數也明顯低于對照組。同時,采用 PSD-HHT 特征融合和三種分類器聯合決策,訓練組所有受試者均成功控制小車達到終點,而對照組受試者未經 NF 訓練,其中有兩名受試者控制失敗,有三名受試者成功控制小車達到終點,但耗時較長,觸碰次數較多。上述結果表明訓練組在分類正確率和控制小車的性能上都優于對照組,證明了基于 EEG 信號特征地形圖的異步實時 NF 的有效性,能夠幫助受試者(用戶)學會自主調節 MI 腦活動,最終使其 MI 誘發的 EEG 信號具有一定程度的可控性和可觀測性,現場測試表明了基于 EEG 信號 NF 控制智能小車方法的有效性。
圖8
受試者控制智能小車達到終點的用時與碰撞次數
Figure8.
Time consuming and the number of collision for subjects to control the intelligent car to reach the end
3 討論
BCI 是一種變革性的新型人機交互技術,它與機器人學相結合的直接 BCR 技術具有重要的科學意義和潛在的應用價值。在眾多直接 BCR 方式中,基于 MI 的直接 BCR 方法是一種重要的心想物移的自然方式[23]。然而,基于 MI 的直接 BCR 在邁向實用化的過程中還面臨著若干技術難題,如:目前尚缺乏讓受試者(用戶)樂意接受的便攜式系統;缺乏能夠高效促進受試者(用戶)訓練的方法或系統;難以提取表征不同 MI 模式之間差異具有統計學意義的 EEG 信號特征;尚需穩定、可靠和準確的解碼方法等問題。基于此,本研究嘗試解決后面三個問題。
針對基于 MI 的 BCR 存在的問題,本研究提出了基于 EEG 信號 NF 訓練受試者以利于受試者調節其腦活動;然后采用 PSD 和 HHT 相結合的 PSD-HHT 特征提取方法,提取表征 MI 模式的 EEG 信號特征;再結合 ELM、LDA 和 SVM 多分類器決策方法,提高分類的穩定性并降低錯誤分類帶來的風險;最后以每 200 ms 更新一次特征提取和分類,實現了對智能小車實時良好的控制。
Xia 等[24]研究提出適當的訓練可以幫助受試者熟練地調節自己的心理活動,他們根據受試者想象過程中的強度變化以視覺反饋的形式來同步訓練受試者,即以條形圖填充的高度不同,顏色也隨之變化的方法來反饋給受試者,訓練 7 天后,取得 80% 的平均分類率。但是該研究訓練受試者時間長,且測試沒有實際控制對象,與之相比,本研究采用異步實時 NF 的方式來訓練受試者,訓練后可以成功地控制小車。kus 等[25]采用 EEG 信號控制光標的 NF 訓練系統,測試時控制虛擬光標箭頭左旋轉或右旋轉 90° 到達規定的終點,與本研究相比,該類研究也屬于虛擬控制,其在自適應調節分類器參數以適應受試者方面取得了一定進展。Lee 等[26]采用視覺和聽覺提示相結合的 NF,取得了一定的效果,但沒有實際用于控制對象,與之相比,本研究實際腦控小車具有可觀測性。本試驗結果表明,所提出的基于 EEG 信號特征能量柱形圖的異步實時 NF 方法有助于受試者操控基于 MI 的 BCI 控制系統,可望為后續研發實用的 BCR 系統提供借鑒。
Kreilinger 等[27]在基于 SSVEPs EEG 信號反饋控制小車的研究中,研究了基于視覺反饋背景的在黑色、靜態現場背景和動態現場背景下的控制效果,動態現場背景下的控制效果在他們提出的訓練受試者的方法之后,控制效果有所改善,但相比本研究基于 MI 的 EEG 信號反饋控制,不存在視覺刺激背景的影響。但這種動態的環境變化是否會影響受試者進行 MI,這是一個很值得研究的方向。Lee 等[28]在基于 SSVEPs EEG 信號反饋控制小車的研究中只采用了一個電極 Oz,進行 SSVEPs 控制小車按規定軌跡運動,與本文相比較,雖采用的 EEG 信號控制機制不一樣,但其所采用的針對單通道 EEG 信號的解碼算法值得借鑒。Shu 等[29]在基于 MI 的 EEG 信號反饋控制虛擬小車中引入誤差電位的新方法,使其在 BCI 應用中成為一種可靠的監控工具,而這將是課題組今后在研究 EEG 信號反饋控制實際小車中的一個重要工具。
有研究表明,HHT 在時域和頻域比小波變換等方法具有更高的分辨率[22],利用其提取能量特征有助于提高分類率。此外,根據本文圖 4 結果可以表明,PSD 可以清晰地表征 ERD 和 ERS 現象,因此可選擇 ERD 和 ERS 現象明顯的頻帶信息與 HHT 能量特征融合。圖 7 的結果進一步表明 HHT 和 PSD 特征相融合有助于提高分類率。
近年來,多個分類器組合應用到 EEG 信號分類中較少,本文嘗試多個分類器組合并基于投票規則輸出指令。本文圖 7 第三排圖即表明了 ELM、LDA 和 SVM 三個分類器聯合決策輸出控制指令的可行性,可增加分類的穩定性降低分類錯誤帶來的控制風險。盡管如此,本試驗中 ELM 的分類性能仍需要進一步提高,在今后的算法研究中,需要優化每個獨立分類器的性能,從而增大組合決策輸出的可靠性。
4 結束語
本文針對直接 BCR 技術中 EEG 信號 NF 訓練受試者及調節腦活動、心理活動的 EEG 信號特征表示及其解碼展開研究,聚焦基于 MI 誘發的 EEG 信號的 BCI 控制智能小車。通過訓練組和對照組研究了采用 EEG 信號特征地形圖的異步實時 NF 方法,PSD-HHT 特征融合,ELM、LDA、SVM 多分類器決策在腦控智能小車中的有效性。結果表明,所提 EEG 信號 NF 方法能夠有效訓練受試者并調節其腦活動,能夠提高腦控性能;多特征融合和多分類器決策也能夠改善腦控性能。本研究可望為后續基于 MI 誘發的 EEG 信號 NF 控制智能機器人的研究提供思路。
反饋是控制的精髓,也是直接 BCR 技術的精髓,尤其是基于 MI 腦控的精髓和關鍵技術,故我們未來的研究方向可擬定為:① 進一步優化 MI 誘發的 EEG 信號 NF 技術并試圖建立數學模型進行分析和設計,期望獲得最優化的可視化 NF 技術,讓受試者(用戶)更輕松地訓練和學習,縮短訓練時間并提高訓練效果;② 在本研究的基礎上,我們也將針對基于 MI 誘發的 EEG 信號的 BCI 控制智能機器人,進一步優化 MI 誘發的 EEG 信號特征提取和分類算法,探索自適應 EEG 信號處理、自適應特征提取和自適應模式分類算法。