機器人康復訓練是解決中風癱瘓患者康復訓練需求的重要方法,康復機器人設定的訓練參數對患者能力的適應程度是決定訓練能否加快患者康復進程的重要因素。目前臨床上的康復訓練內容由康復醫師對患者進行量表評估并結合自己的經驗制定,這種經驗式的訓練方法在康復機器人訓練過程中無法實現。為了探討上肢康復機器人運動訓練參數與患者運動能力之間的關系,本文建立了牽引式上肢康復機器人訓練的 Simulink 人機整體模型,并將模型計算的人體肩關節、肘關節運動與實際動作下的肩關節、肘關節運動進行了對照。分析顯示仿真結果與實驗數據存在明顯的相關性,從而證明了模型的準確性。進一步地,本文根據模型仿真結果擬合了人機接觸端平面畫圓半徑與人體肩關節、肘關節主動運動自由度的線性函數關系,為臨床上康復機器人制定訓練目標提供了量化參考。
引用本文: 劉亞麗, 季林紅. 基于 Simulink 的上肢康復訓練人機整體建模與分析. 生物醫學工程學雜志, 2018, 35(1): 8-14. doi: 10.7507/1001-5515.201703070 復制
版權信息: ?四川大學華西醫院華西期刊社《生物醫學工程學雜志》版權所有,未經授權不得轉載、改編
引言
中風是一種發病率與致殘率很高的腦血管血液循環疾病。中風患者在脫離生命危險后,會出現多種能力損傷,例如語言能力、上肢抓握能力、下肢行走運動能力以及平衡能力等,甚至完全失去生活自理的能力[1-2]。研究表明,近 2/3 的中風患者會出現上肢或者下肢癱瘓,無法完成日常活動[3]。中風患者發病后的康復訓練成為患者回歸家庭乃至回歸社會的重要決定因素,而我國的臨床康復訓練醫師資源遠遠不能滿足不斷增多的中風癱瘓患者的需求。
為了應對康復訓練資源短缺并緩解康復訓練醫師的工作壓力等問題,科研工作者將機器人應用到了康復訓練領域。機器人憑借其特有的高重復性、高精確性等特點,逐漸成為一種重要的康復訓練方法[4-5]。
針對中風癱瘓早期患者,上肢康復機器人以機器人主動牽引訓練模式為主[6]。患者患肢在機器人牽引下進行被動跟隨運動時,其運動訓練平面以及運動軌跡參數需根據患者本身特點進行調整。通過對預期訓練平面與訓練運動范圍的設定,可以使訓練難度適應每位患者的運動能力,既避免受試者患肢被過渡牽拉而受到二次傷害,又避免訓練難度過低,無法起到提高患者能力的作用[7]。
患者關節的主動運動自由度(active degree of freedom,ADOF)檢測是臨床上對患者功能評定的基本內容,是量化評估的重要參數[8]。根據量化的 ADOF 結果為患者的康復訓練提供直接有效的指導,是臨床評估的重要目的。而目前在臨床的訓練過程中,并沒有根據 ADOF 對康復訓練直接進行指導的參考準則。臨床訓練中,康復醫師多根據患者運動過程中的表現以及自身的臨床經驗進行訓練動作及訓練幅度的調整。然而,這種根據醫師經驗進行調整的訓練方式,對醫師的個人能力依賴性強,醫師的主觀性對訓練方案影響大[9]。因此,根據評估內容制定一種客觀的康復訓練目標準則,對患者的康復訓練具有重要意義。
本文通過對二連桿串聯型上肢康復機器人康復訓練過程進行人機整體建模,研究了上肢運動關節的簡化問題,并通過與實際的運動參數對比,驗證了所建模型的正確性。除此之外,根據仿真數據,本文分析了人機接觸端平面運動與人體上肢關節運動的關系,擬合了接觸端平面運動參數與關節運動活動度之間的線性函數,為臨床上機器人康復訓練參數的設定提供了量化準則。
1 系統介紹
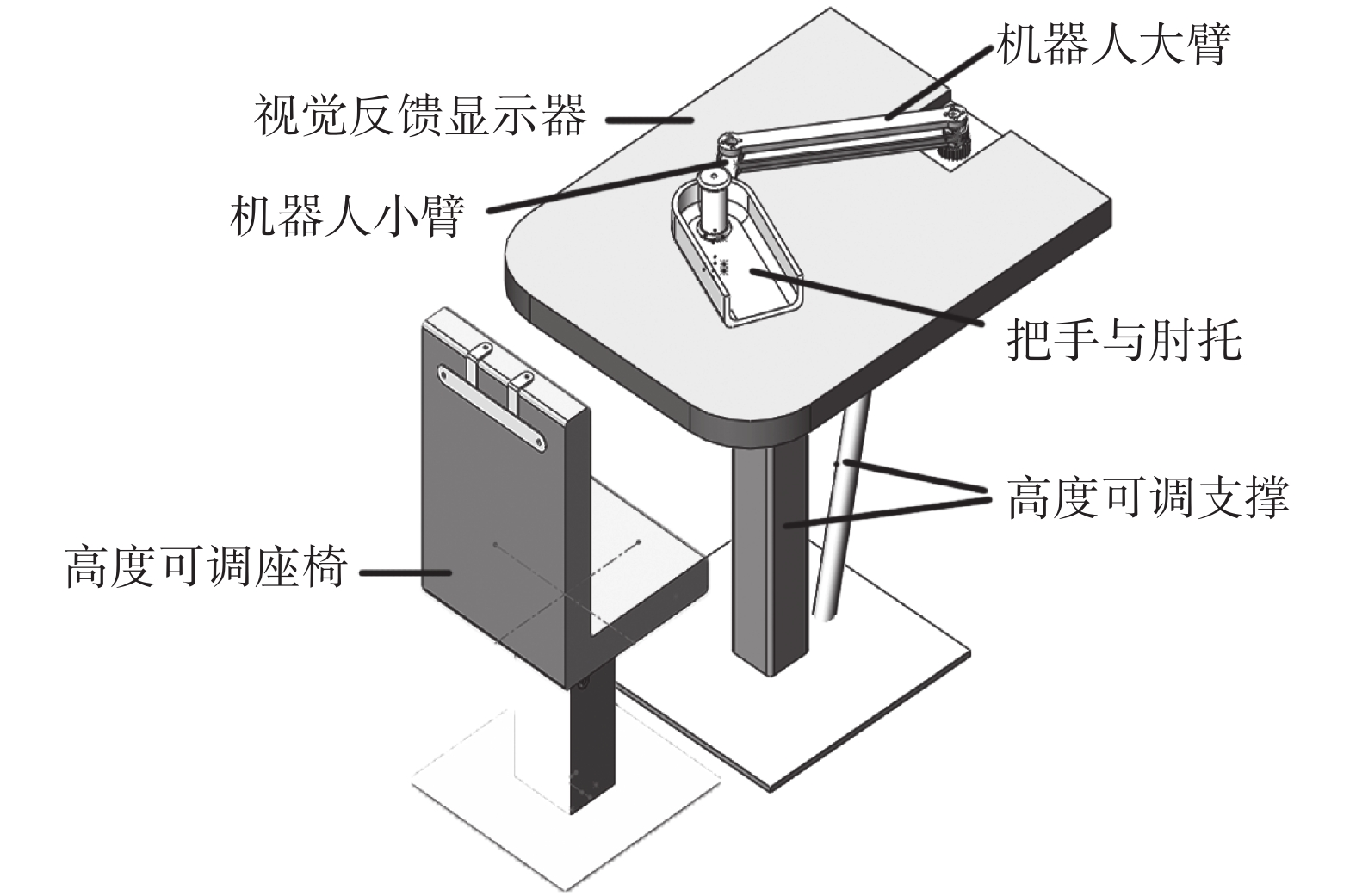
上肢康復訓練機器人采用二連桿串聯型布置方式,模擬人體上肢的大臂與小臂。早期的上肢康復機器人設有兩個主動驅動自由度,臨床應用過程中,發現患者的腕關節背屈嚴重,人機交互末端由于患者腕關節自由度缺失,使受試者產生了畸形的運動形態[10]。因此,本文在原有串聯型機器人基礎上,在人機交互端增設隨動旋轉自由度以彌補患者腕關節的受損,從而使受試者在訓練過程中時刻保持自然的腕關節運動狀態。為了增加上肢康復機器人對受試者身高等個人身體參數的適應性,設計了可調高度座椅與可調高度訓練平面。改良后的串聯型上肢康復機器人系統如圖 1 所示。
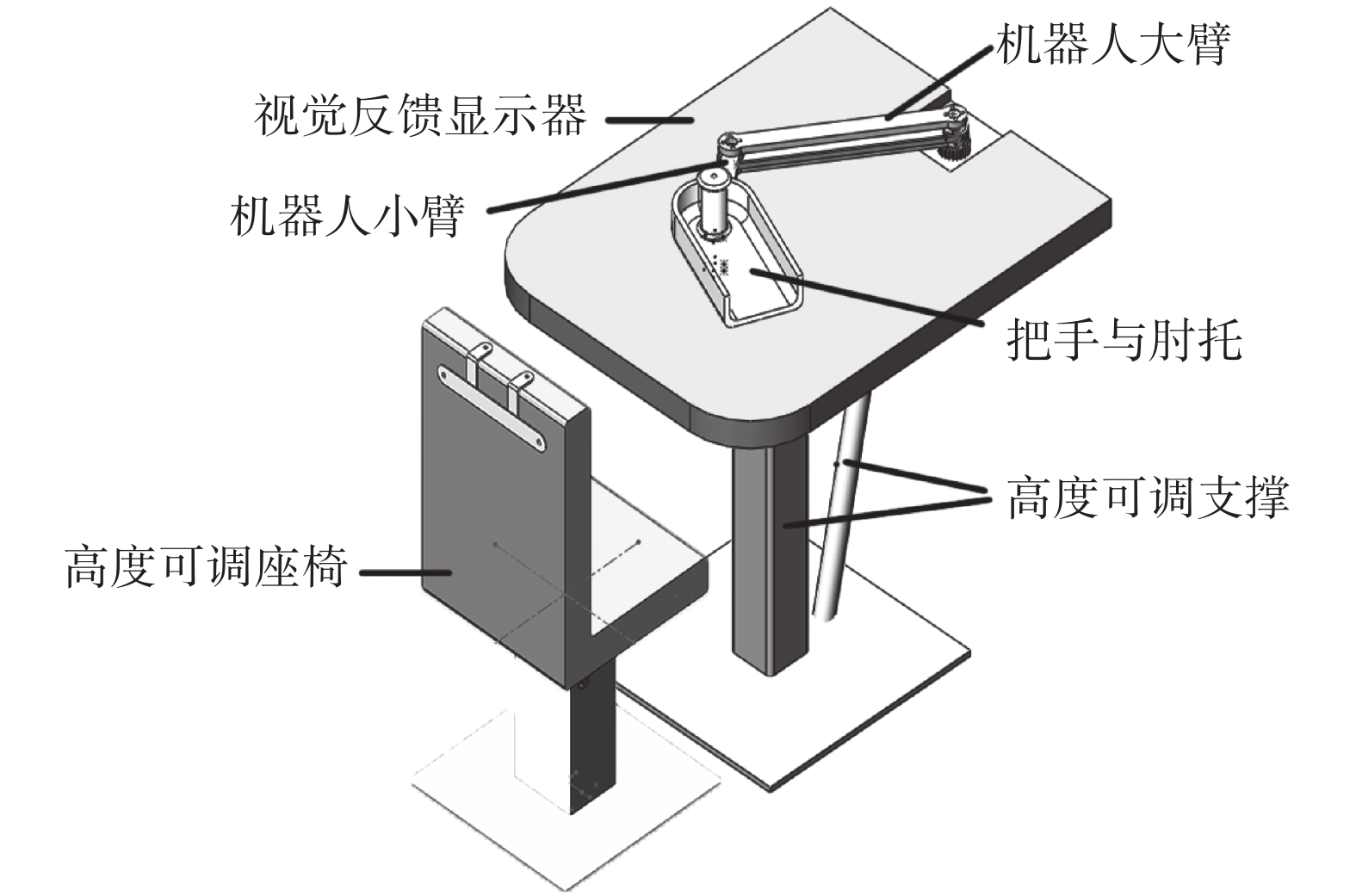 圖1
改良版串聯型上肢康復機器人
Figure1.
The modified series end-effector upper limb rehabili tation robot
圖1
改良版串聯型上肢康復機器人
Figure1.
The modified series end-effector upper limb rehabili tation robot
2 Simulink 人機整體建模
上肢康復機器人建模分析主要集中于外骨骼可穿戴式康復機器人,旨在分析外骨骼式康復機器人各活動關節與人體協調運動的布置方式[11-13]。在外骨骼式康復機器人中,對人體上肢活動關節簡化如下:肩關節屈曲伸展、外展內收與內旋外旋 3 個旋轉自由度,肘關節屈曲伸展 1 個自由度,腕關節外展內收與旋前旋后 2 個旋轉自由度。由于上肢運動關節的冗余性與復雜性,將人體運動與機器人運動作為整體進行建模分析的研究較少,多集中于機器人運動的研究[14-15]。平面運動末端牽引式上肢康復機器人訓練過程中,僅有末端點與患者上肢末端手進行接觸,可將人機作為一個協調運動的整體進行建模分析。
患者在跟隨上述康復機器人進行被動牽拉訓練時,為了防止患者的軀干產生代償,患者的軀干被醫用綁帶束縛在可調整高度座椅之上。因此,在人機整體運動過程中,肩關節的空間位置為固定不變。對被動牽引過程中的人機整體進行簡化分析:二連桿串聯型上肢康復機器人運動形式簡化為 2 個單獨驅動的旋轉主動自由度,人體上肢肩關節運動形式簡化為 3 個旋轉自由度,肘關節運動形式簡化為 1 個旋轉自由度[16-18]。患者的手功能受損,無法完成獨自抓握機器人末端把手的動作。為此,患者在運動訓練過程中,將患者手部與機器人末端進行綁帶固定。在建模過程中將人體的腕關節與機器人末端看作一個整體,統一簡化為腕部接觸端,運動形式簡化為 1 個旋轉自由度。
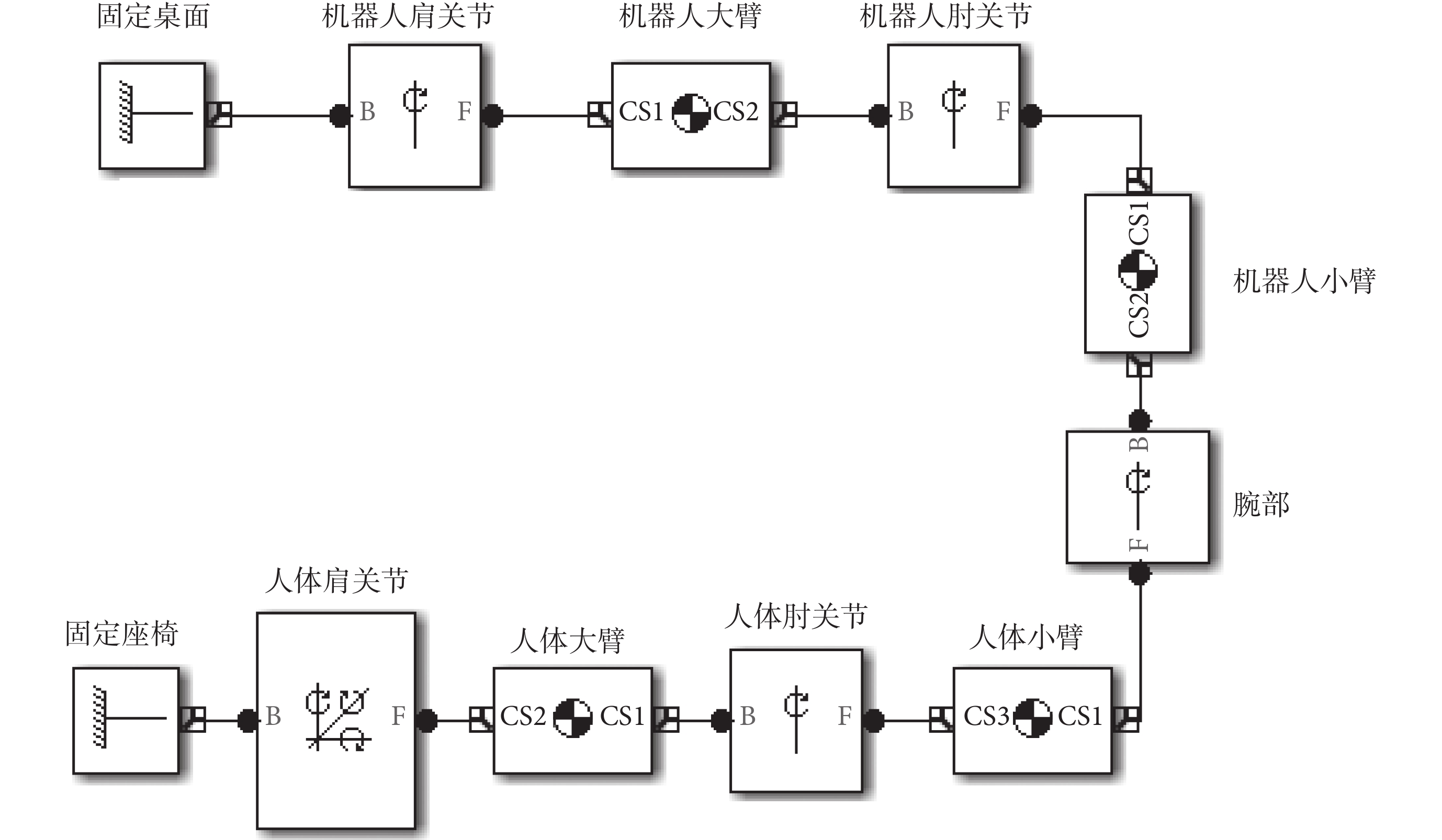
在 Matlab Simulink(Matlab R2014a,MathWorks,美國)中進行建模,建模圖形如圖 2 所示。
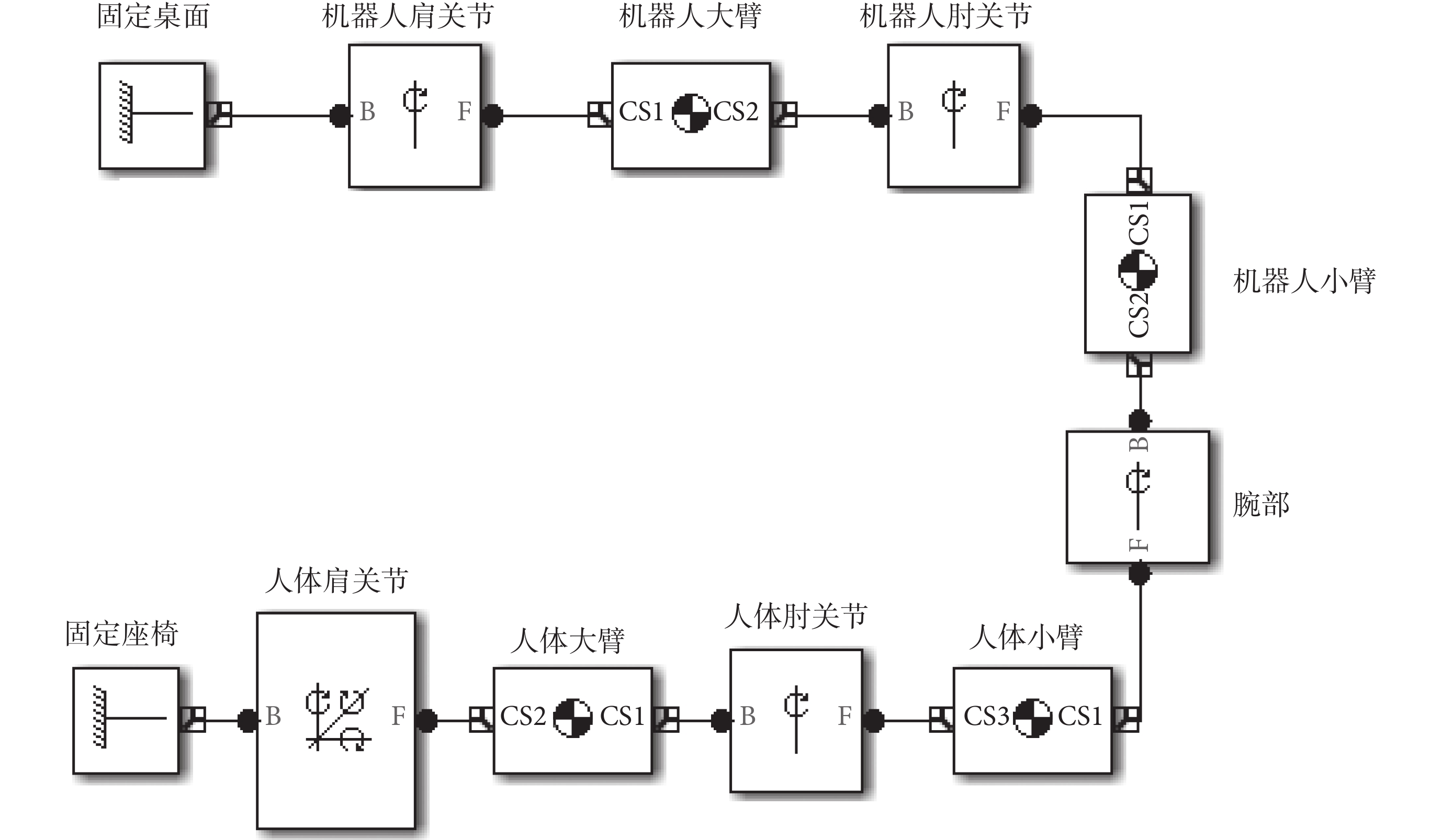 圖2
人機整體的 Simulink 模型
Figure2.
The global Simulink model of human and robot
圖2
人機整體的 Simulink 模型
Figure2.
The global Simulink model of human and robot
肩關節、肘關節在建模過程中,其旋轉軸的定義如下:肩關節內旋外旋運動選擇絕對坐標系下 X 軸的轉動,肩關節屈曲伸展運動選擇絕對坐標系下 Y 軸的轉動,肩關節外展內收運動選擇絕對坐標系下 Z 軸的轉動;肘關節屈曲伸展運動選擇絕對坐標系下 Z 軸的旋轉。考慮到人體實際運動關節角度范圍,模型建立過程中(人體上臂伸直位于矢狀面內時各關節角度為 0°,電機初始位置為 0°),設定肩關節運動范圍(屈曲伸展:—90~90°;外展內收:—90~90°;內旋外旋:—90~90°)、肘關節運動范圍(—180~0°)、機器人電機 1 運動角度范圍(—90~0°)和機器人電機 2 運動角度范圍(0~180°)。仿真運動中,末端運動軌跡運動精度在 1 mm。機械臂依據實際機械臂長度建模,人體大臂小臂建模長度參照人體工學 95% 分位數據設定:機械臂大臂長度 400 mm,機械臂小臂長度 300 mm,人體大臂長度 340 mm,人體小臂加手掌部分長度 360 mm。
為了研究人體肩肘運動關節的主動活動度對末端運動區域范圍的影響,我們采用反向仿真的方式進行動作仿真,即通過設定末端運動軌跡,選擇對機器人的兩個自由度進行運動學參數驅動,從而反算出人體上肢的肩肘關節運動角度,再根據仿真結果,分析肩關節、肘關節活動度對末端運動軌跡的影響。人機整體建模簡化過程中,將肘關節的空間運動簡化為平面運動,會使得模型仿真運動與患者的真實運動存在差異,使仿真得到的肩肘關節運動角度與實際運動過程中的肩肘關節運動角度在數值上存在一定差異,但可以通過關節角度相關性分析來確定其仿真數據與實際運動數據的關系,從而說明模型的準確性。
3 運動仿真
在對機器人的兩個自由度進行驅動時,首先要解決串聯機構逆運動學求解問題。人體上肢骨骼由肱骨與尺骨、橈骨三部分構成,肱骨與尺骨、橈骨連接構成肘關節。由于肱骨的內外兩個上髁、鷹嘴窩和尺骨上的鷹嘴突起的存在,限制了肘關節的伸展角度,從而使得人體上肢在運動過程中小臂始終處于大臂的前面[16]。通過模擬人體上肢運動過程中大臂與小臂的運動特點,來解決串聯型機構逆運動學問題。
3.1 機構運動逆運動學
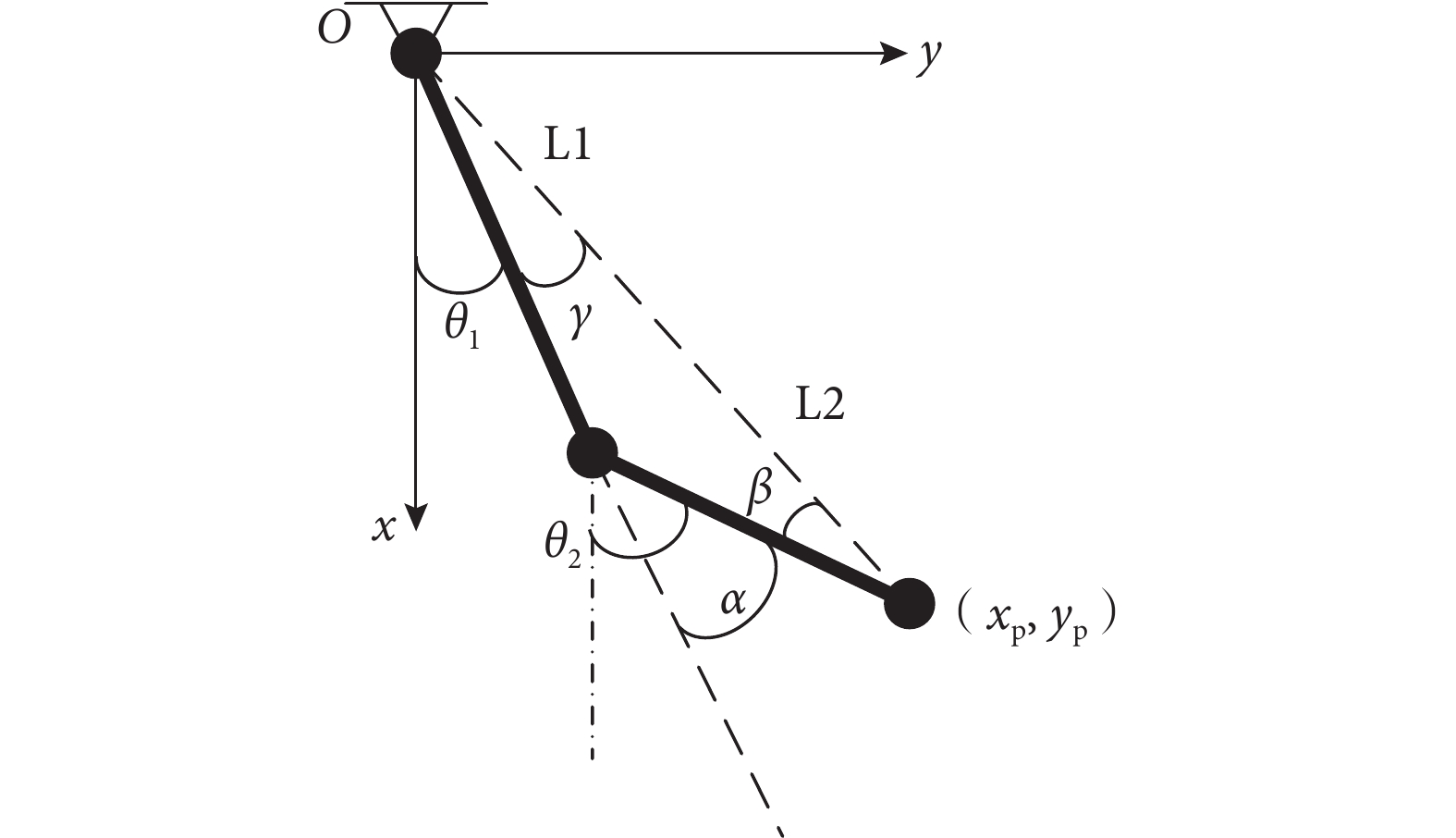
二連桿串聯型機器人運動簡圖如圖 3 所示。
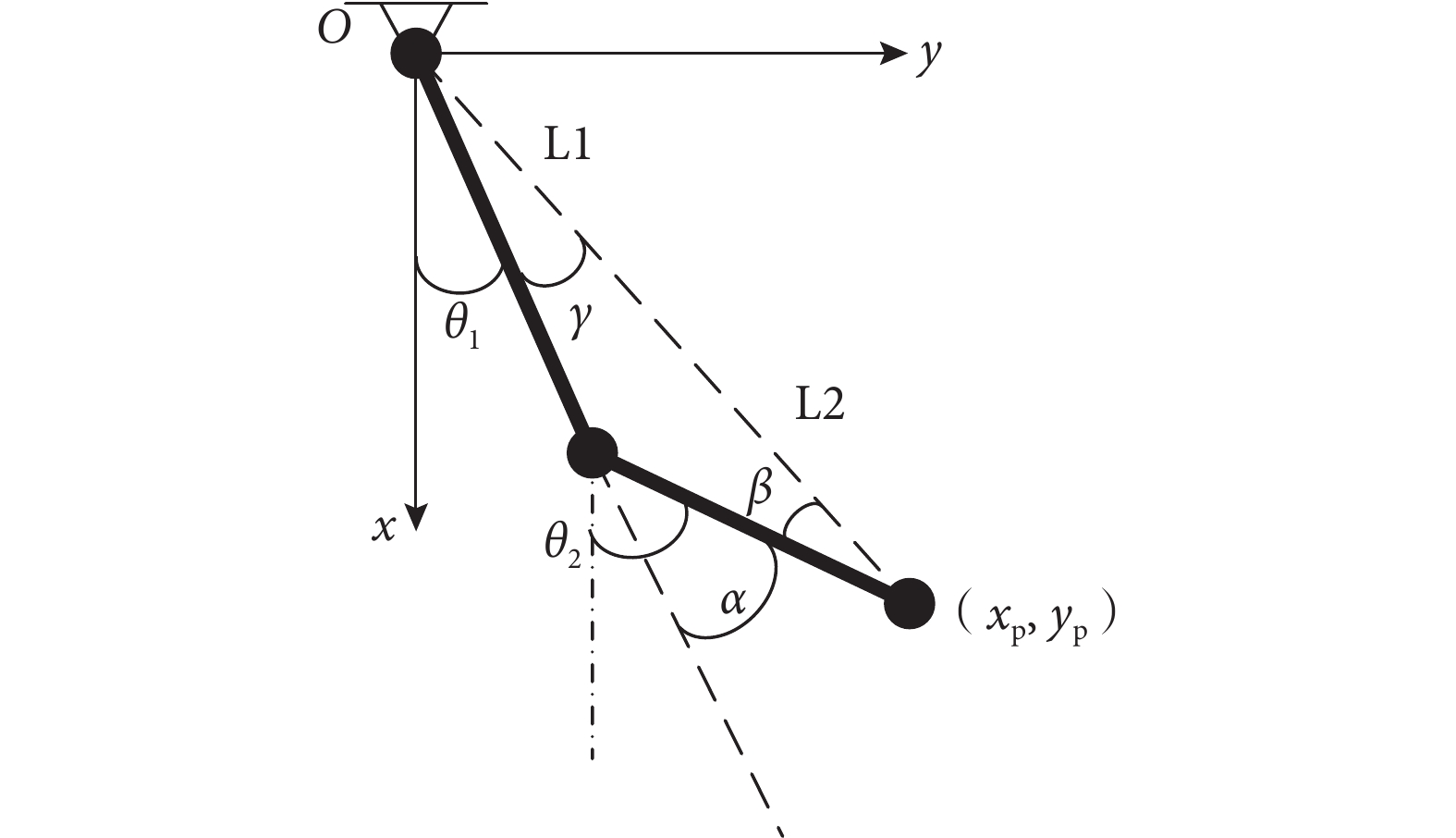 圖3
二連桿串聯型上肢康復機器人運動學模型
Figure3.
Kinematic model of series end-effector upper limb rehabilitation robot
圖3
二連桿串聯型上肢康復機器人運動學模型
Figure3.
Kinematic model of series end-effector upper limb rehabilitation robot
根據人體大臂小臂的運動特點,確定運動角度
 。由末端運動軌跡(xp,yp)可計算出機器人兩個驅動關節的轉角
。由末端運動軌跡(xp,yp)可計算出機器人兩個驅動關節的轉角
 和
和
 。
。
3.2 Simulink 模型運動仿真
將運動學計算與 Simulink 中建立的人機整體模型結合,運動學參數作為 Simulink 模型的輸入數據,進行人機整體運動學仿真計算。仿真計算過程中以實現接觸端運動軌跡為目標,記錄在對應軌跡下的肩關節三軸運動角度及肘關節運動角度。畫圓動作是機器人運動訓練過程中普遍采取的訓練內容,是肩關節、肘關節協調運動的典型動作[19]。選取接觸端畫圓軌跡進行仿真分析,以畫圓半徑作為同一運動平面的變量,分析肩關節、肘關節的運動情況。
3.2.1 接觸端畫圓軌跡半徑不同時,上肢肩關節、肘關節運動情況
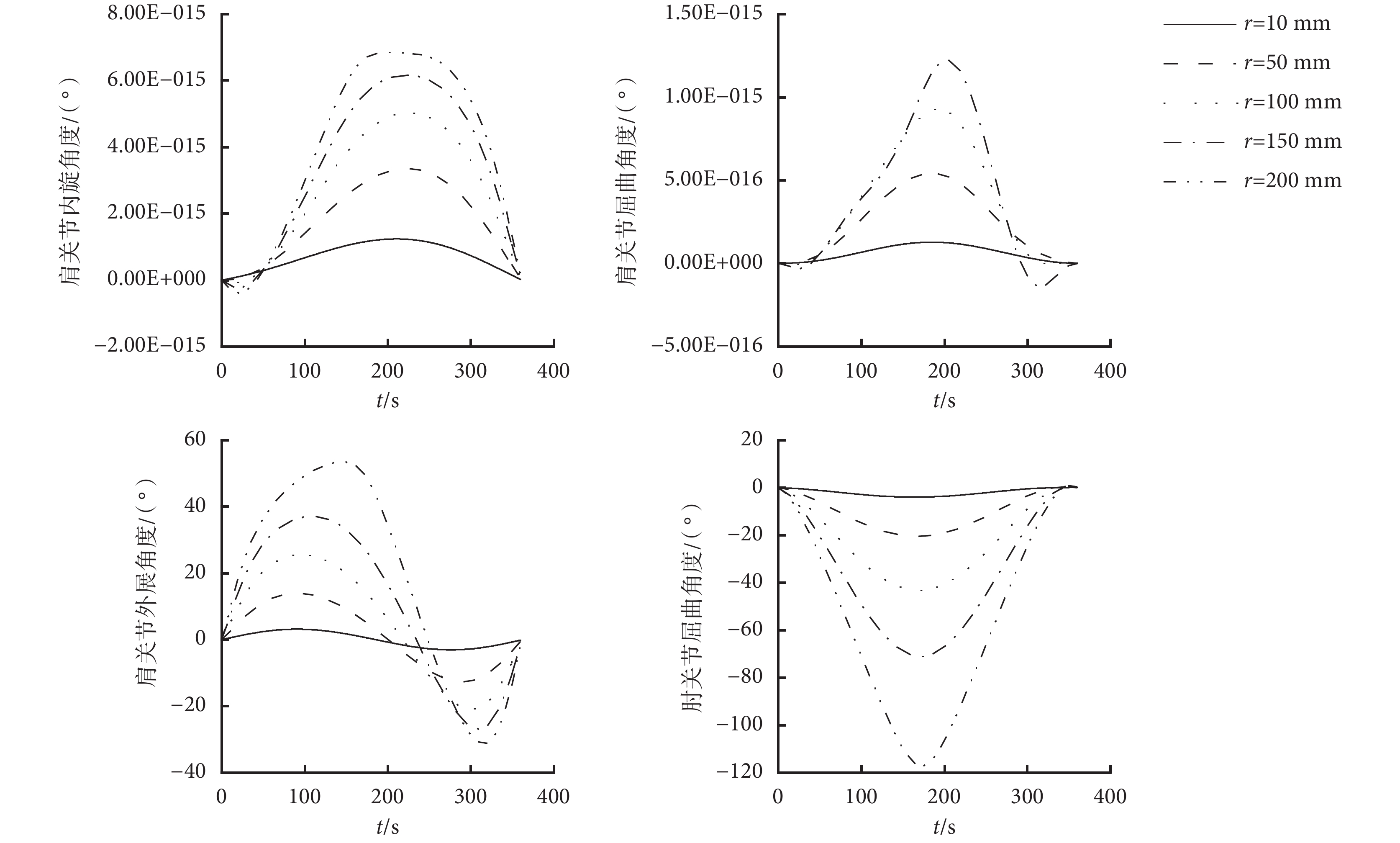
模型運動過程中以實現人機接觸端以順時針運動的方式完成同一起點不同畫圓半徑的運動軌跡為目標,分析肩關節、肘關節運動過程中的角度變化,如圖 4 所示。運動過程中肩關節 X 軸 Y 軸的旋轉動作小于 1°,而 Z 軸旋轉動作幅度明顯大于 X 軸與 Y 軸動作,肩關節的 Z 軸旋轉的運動曲線呈非對稱正弦曲線變化,并且隨著畫圓半徑的增加非對稱性增強;而肘關節的運動,則呈現單峰對稱變化。仿真模擬受試者右側上臂進行訓練的過程,選取受試者坐位正視前方姿態下,正前方的點作為起始運動點。畫圓運動過程中,肩關節由外展向內收過渡,并且由于初始運動動作肩關節已處于外展狀態,因此動作過程中肩關節的旋轉角度呈現不對稱性,并且隨著畫圓半徑的不斷變大,其非對稱性更加明顯——肩關節外展動作在動作完成過程中的比例明顯變大。相對于肩關節的運動不對稱性,肘關節呈現出良好的單峰對稱性。在畫圓過程中,肘關節一直處于伸展的狀態。
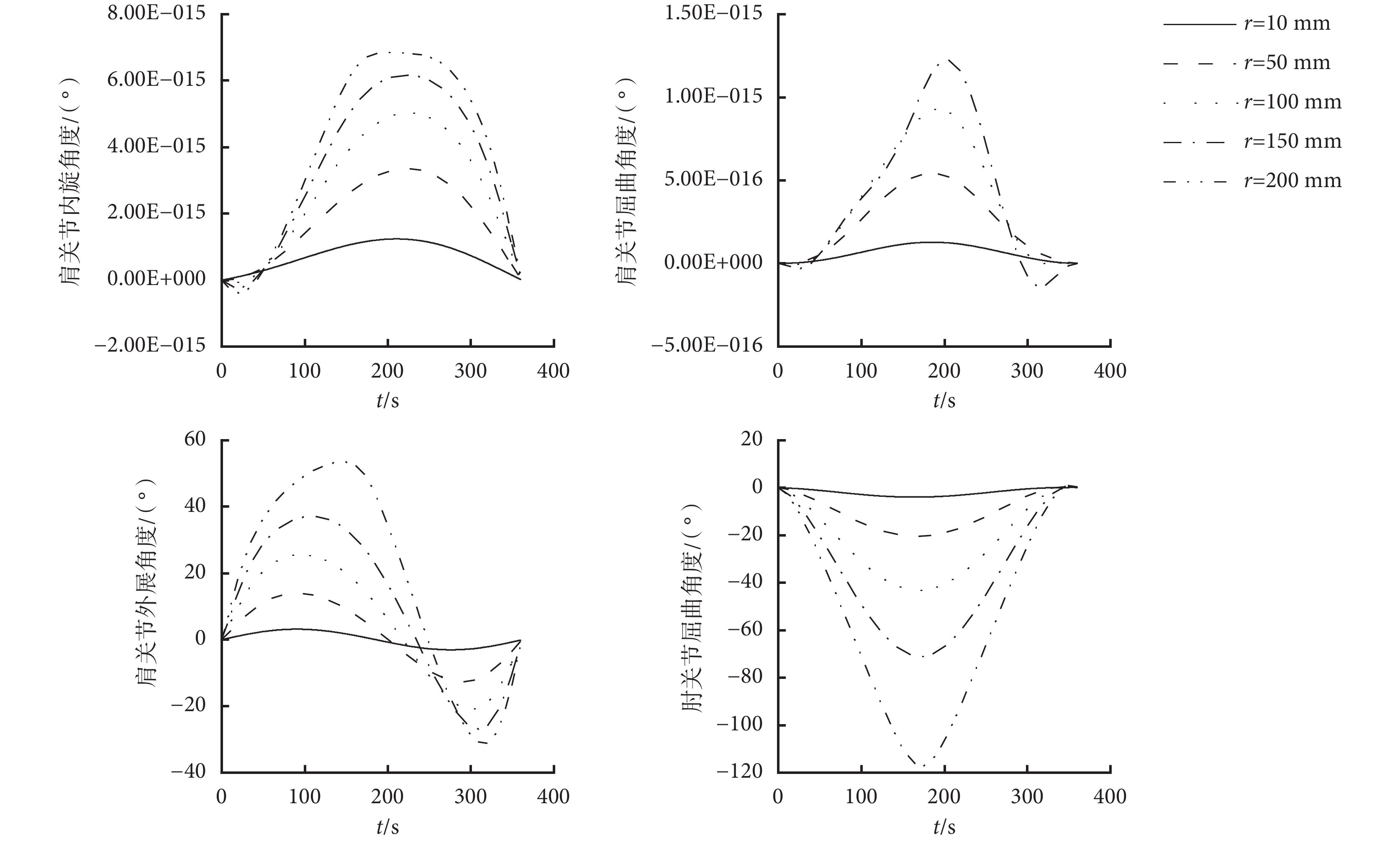 圖4
同一運動平面下,末端畫圓半徑不同時肩關節、肘關節運動曲線
Figure4.
Angles of shoulder and elbow joints during different circle drawing tasks on one plane
圖4
同一運動平面下,末端畫圓半徑不同時肩關節、肘關節運動曲線
Figure4.
Angles of shoulder and elbow joints during different circle drawing tasks on one plane
3.2.2 不同訓練平面,相同半徑軌跡下肩關節、肘關節的運動情況
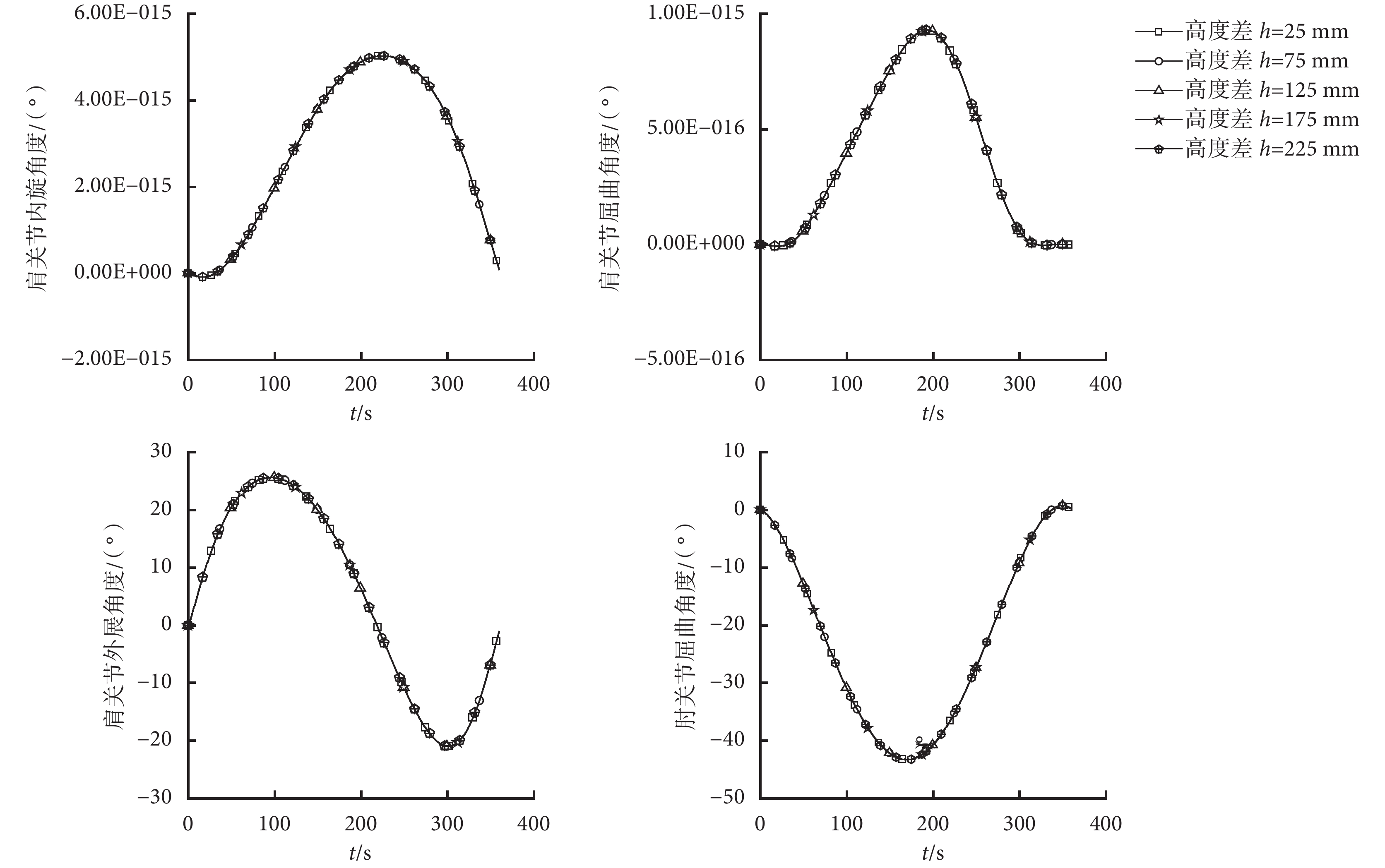
實際臨床訓練中,肩關節、肘關節處于空間運動,但在建模過程中將肘關節的空間運動簡化成平面運動。為了研究這種建模簡化方式對肩關節、肘關節運動情況的影響,以肩關節、肘關節運動平面的高度差作為變量,分析在不同訓練平面下,相同的運動軌跡肩關節、肘關節的運動角度差異性(仿真過程中以 r = 100 mm 圓形軌跡為例)。
通過圖 5 中肩關節、肘關節的角度變化可知,在不同運動平面運動時,其肩關節運動形式與肘關節運動形式沒有差異。當末端運動軌跡相同時,訓練平面不影響肩關節、肘關節的運動情況。除此之外,我們發現肩關節在內旋外旋以及屈曲伸展方向的運動角度遠小于 1°,可忽略不計,即可認為在訓練平面確定后,人體肩關節在內旋外旋與屈曲伸展方向均不產生運動,僅存在外展內收方向上的運動。
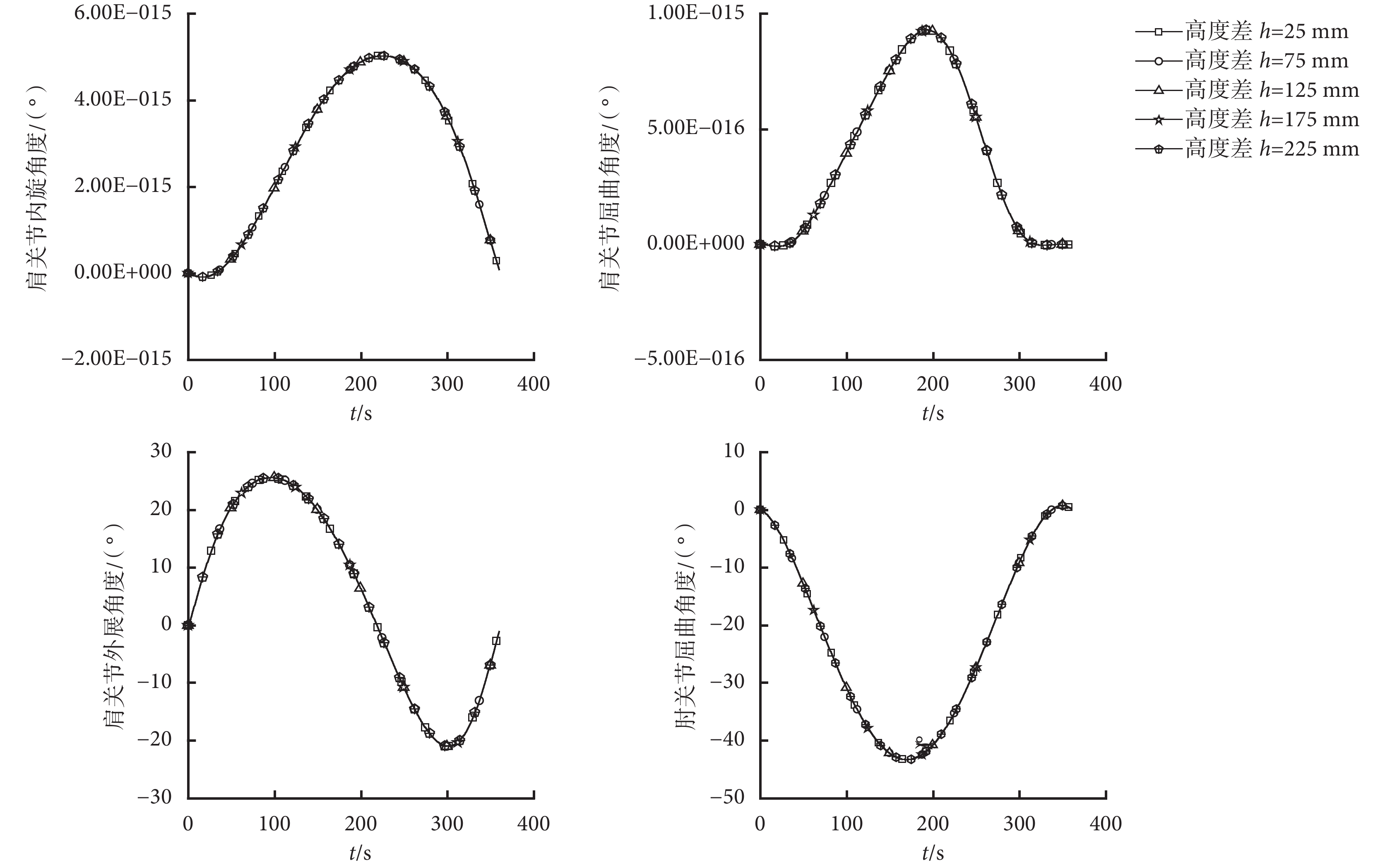 圖5
不同訓練平面 r = 100 mm 圓形軌跡繪制動作下的肩關節、肘關節運動曲線
Figure5.
Angles of shoulder and elbow joints during the same circle drawing task (r = 100 mm) in different planes
圖5
不同訓練平面 r = 100 mm 圓形軌跡繪制動作下的肩關節、肘關節運動曲線
Figure5.
Angles of shoulder and elbow joints during the same circle drawing task (r = 100 mm) in different planes
訓練平面的不同對肩關節的初始姿態存在明顯的影響,如表 1 所示。不同的訓練高度差對肩關節內旋外旋與屈曲伸展的角度有明顯的影響,而對于外展內收的運動角度沒有影響。這說明在空間運動中,運動訓練平面的選擇主要取決于肩關節的屈曲伸展與內旋外旋的運動自由度,而肩關節外展內收的運動角度對訓練平面的設定沒有影響。
綜合考慮訓練平面以及末端繪制軌跡對肩關節、肘關節運動的影響,可以得到以下結論:訓練平面的不同會引起肩關節內旋外旋以及屈曲伸展角度的變化,但不影響肩關節的外展內收動作。而在平面畫圓動作中,肩關節主要呈現外展內收動作,并且隨著運動半徑的增大,外展動作在運動周期中所占比例增大,肘關節在整個運動過程中呈現伸展運動,配合肩關節共同完成末端軌跡的繪制工作。
4 模型驗證
為了驗證模型仿真的正確性與合理性,采集訓練過程中受試者的肩肘關節運動角度進行對比說明。通過將健康受試者在畫圓運動軌跡下的肩肘關節運動角度與仿真分析得到的關節運動角度進行相關性分析,驗證模型的準確性。
實驗中,招募 9 名健康受試者,均為男性,年齡(27.17 ± 9.27)歲,上肢長度(66.12 ± 2.51)cm[大臂長度(32.00 ± 1.25)cm,小臂長度(34.12 ± 2.24)cm],調整座椅高度,實現肩關節與肘關節所在平面高度差為 225 mm,進行人機接觸端圓形軌跡繪制運動。受試者測試實驗在國家康復研究中心附屬醫院科研室進行,由康復研究中心附屬醫院進行倫理審核,每位受試者在測試前告知詳細的測試方案與測試目的,并簽署知情同意書。運動過程中,采用 Vicon(VICON MXULTRANET HD,Oxford Metrics Ltd.,英國)三維動態捕捉系統的 8 個紅外攝像儀對肩肘關節的運動角度進行采集。將采集到的肩關節、肘關節運動角度與 Simulink 仿真獲得的運動角度進行線性相關性分析。
受試者在實際的空間動作過程中并未對肘關節的運動平面進行嚴格的固定限制,即肘關節處于空間運動而非平面運動,肩關節、肘關節所在平面的高度差存在變化,在實際的運動過程中肩關節會出現屈曲伸展與內旋外旋的角度變化。
基于前面的分析可知,訓練平面對肩關節的內旋外旋與屈曲伸展動作有直接影響,即當訓練平面確定后,其肩關節的內旋外旋與屈曲伸展角度即已確定。仿真分析過程中選定了運動平面,因此肩關節只出現外展內收動作,其他兩個自由度的動作在運動過程中保持不變。
因此,將仿真過程中肩關節外展內收的運動角度及肘關節的屈曲伸展角度與實驗采集過程中獲得的對應角度進行相關性分析,以驗證模型對平面運動過程仿真的準確性。進行相關性分析時,采用皮爾森兩變量相關性判斷方法,并進行雙向顯著性檢驗,結果如表 2 所示。
相關性分析結果顯示,Simulink 模型仿真獲得的肩關節外展內收的運動角度及肘關節屈曲伸展的運動角度與實驗過程中采集到的對應數據呈正相關,從而證明,可以由仿真獲得的肩關節、肘關節運動角度模擬實際平面運動過程中的關節角度。
5 函數擬合
末端牽引式上肢康復機器人進行訓練時,以實現末端設定軌跡為主要訓練內容,其中設定的訓練幅度成為機器人運動訓練是否有效的重要決定因素。因此,如何根據受試者的關節自由度情況確定受試者所能承受的最大訓練幅度成為訓練過程中需要解決的重要問題。
由前面的分析可知,在 Simulink 模型中可以對平面運動過程中肩關節外展內收的運動角度以及肘關節屈曲伸展的運動角度進行有效的仿真。因此可以利用 Simulink 模型,根據末端運動軌跡直接求出肩關節與肘關節的運動幅度。反過來,根據模型計算角度與末端運動軌跡參數進行其相互關系的函數擬合,從而實現根據運動幅度確定其末端運動軌跡參數,可以為實際的機器人運動訓練中參數的設定提供參考。
增加前面分析過程中畫圓半徑的組數,獲得 10 組畫圓半徑與肩肘關節角度的數據,進行三個參數間的線性擬合分析,獲得其函數方程如下:
 |
其中,y 為畫圓半徑;x1 為肩關節外展內收主動運動范圍;x2 為肘關節屈曲伸展主動運動范圍。三個參數間線性函數擬合程度良好,R2 = 0.99(F = 1 188.466,P<0.005)。
根據函數方程(1),我們即可由肩關節與肘關節的 ADOF 得到其末端訓練軌跡的最大畫圓半徑,在機器人訓練過程中進行參數設定。
考慮到建模過程中采用 95% 分位數據建立人機整體模型,該擬合函數的適應人群為 18~60 歲成年男性。
6 結論
本文通過對二連桿串聯型上肢康復機器人與人體上肢進行 Simulink 整體建模,分析了不同訓練平面以及不同訓練軌跡對肩關節、肘關節活動的影響。仿真分析表明,訓練平面的確定與肩關節屈曲伸展與外旋內旋的運動角度有關,而接觸端平面活動區域則由肩關節外展內收與肘關節屈曲伸展活動范圍綜合確定。并且,根據仿真結果,本文擬合了人機接觸端平面畫圓半徑與肩關節、肘關節運動范圍的線性函數關系,可以根據受試者肩關節、肘關節的主動活動度確定其訓練活動范圍,為牽引式上肢康復機器人訓練參數的設定提供依據。本文旨在通過末端牽引式上肢康復機器人平面運動人機整體模型,確定末端活動軌跡與人體肩關節、肘關節活動度之間的量化關系,從而為康復訓練內容的制定提供量化參考依據,為每一位患者提供個性化康復訓練。文中對于運動速度與加速度等內容未進行進一步分析,在后續研究訓練內容與患者力量量化關系中需要加以討論與分析。
引言
中風是一種發病率與致殘率很高的腦血管血液循環疾病。中風患者在脫離生命危險后,會出現多種能力損傷,例如語言能力、上肢抓握能力、下肢行走運動能力以及平衡能力等,甚至完全失去生活自理的能力[1-2]。研究表明,近 2/3 的中風患者會出現上肢或者下肢癱瘓,無法完成日常活動[3]。中風患者發病后的康復訓練成為患者回歸家庭乃至回歸社會的重要決定因素,而我國的臨床康復訓練醫師資源遠遠不能滿足不斷增多的中風癱瘓患者的需求。
為了應對康復訓練資源短缺并緩解康復訓練醫師的工作壓力等問題,科研工作者將機器人應用到了康復訓練領域。機器人憑借其特有的高重復性、高精確性等特點,逐漸成為一種重要的康復訓練方法[4-5]。
針對中風癱瘓早期患者,上肢康復機器人以機器人主動牽引訓練模式為主[6]。患者患肢在機器人牽引下進行被動跟隨運動時,其運動訓練平面以及運動軌跡參數需根據患者本身特點進行調整。通過對預期訓練平面與訓練運動范圍的設定,可以使訓練難度適應每位患者的運動能力,既避免受試者患肢被過渡牽拉而受到二次傷害,又避免訓練難度過低,無法起到提高患者能力的作用[7]。
患者關節的主動運動自由度(active degree of freedom,ADOF)檢測是臨床上對患者功能評定的基本內容,是量化評估的重要參數[8]。根據量化的 ADOF 結果為患者的康復訓練提供直接有效的指導,是臨床評估的重要目的。而目前在臨床的訓練過程中,并沒有根據 ADOF 對康復訓練直接進行指導的參考準則。臨床訓練中,康復醫師多根據患者運動過程中的表現以及自身的臨床經驗進行訓練動作及訓練幅度的調整。然而,這種根據醫師經驗進行調整的訓練方式,對醫師的個人能力依賴性強,醫師的主觀性對訓練方案影響大[9]。因此,根據評估內容制定一種客觀的康復訓練目標準則,對患者的康復訓練具有重要意義。
本文通過對二連桿串聯型上肢康復機器人康復訓練過程進行人機整體建模,研究了上肢運動關節的簡化問題,并通過與實際的運動參數對比,驗證了所建模型的正確性。除此之外,根據仿真數據,本文分析了人機接觸端平面運動與人體上肢關節運動的關系,擬合了接觸端平面運動參數與關節運動活動度之間的線性函數,為臨床上機器人康復訓練參數的設定提供了量化準則。
1 系統介紹
上肢康復訓練機器人采用二連桿串聯型布置方式,模擬人體上肢的大臂與小臂。早期的上肢康復機器人設有兩個主動驅動自由度,臨床應用過程中,發現患者的腕關節背屈嚴重,人機交互末端由于患者腕關節自由度缺失,使受試者產生了畸形的運動形態[10]。因此,本文在原有串聯型機器人基礎上,在人機交互端增設隨動旋轉自由度以彌補患者腕關節的受損,從而使受試者在訓練過程中時刻保持自然的腕關節運動狀態。為了增加上肢康復機器人對受試者身高等個人身體參數的適應性,設計了可調高度座椅與可調高度訓練平面。改良后的串聯型上肢康復機器人系統如圖 1 所示。
圖1
改良版串聯型上肢康復機器人
Figure1.
The modified series end-effector upper limb rehabili tation robot
2 Simulink 人機整體建模
上肢康復機器人建模分析主要集中于外骨骼可穿戴式康復機器人,旨在分析外骨骼式康復機器人各活動關節與人體協調運動的布置方式[11-13]。在外骨骼式康復機器人中,對人體上肢活動關節簡化如下:肩關節屈曲伸展、外展內收與內旋外旋 3 個旋轉自由度,肘關節屈曲伸展 1 個自由度,腕關節外展內收與旋前旋后 2 個旋轉自由度。由于上肢運動關節的冗余性與復雜性,將人體運動與機器人運動作為整體進行建模分析的研究較少,多集中于機器人運動的研究[14-15]。平面運動末端牽引式上肢康復機器人訓練過程中,僅有末端點與患者上肢末端手進行接觸,可將人機作為一個協調運動的整體進行建模分析。
患者在跟隨上述康復機器人進行被動牽拉訓練時,為了防止患者的軀干產生代償,患者的軀干被醫用綁帶束縛在可調整高度座椅之上。因此,在人機整體運動過程中,肩關節的空間位置為固定不變。對被動牽引過程中的人機整體進行簡化分析:二連桿串聯型上肢康復機器人運動形式簡化為 2 個單獨驅動的旋轉主動自由度,人體上肢肩關節運動形式簡化為 3 個旋轉自由度,肘關節運動形式簡化為 1 個旋轉自由度[16-18]。患者的手功能受損,無法完成獨自抓握機器人末端把手的動作。為此,患者在運動訓練過程中,將患者手部與機器人末端進行綁帶固定。在建模過程中將人體的腕關節與機器人末端看作一個整體,統一簡化為腕部接觸端,運動形式簡化為 1 個旋轉自由度。
在 Matlab Simulink(Matlab R2014a,MathWorks,美國)中進行建模,建模圖形如圖 2 所示。
圖2
人機整體的 Simulink 模型
Figure2.
The global Simulink model of human and robot
肩關節、肘關節在建模過程中,其旋轉軸的定義如下:肩關節內旋外旋運動選擇絕對坐標系下 X 軸的轉動,肩關節屈曲伸展運動選擇絕對坐標系下 Y 軸的轉動,肩關節外展內收運動選擇絕對坐標系下 Z 軸的轉動;肘關節屈曲伸展運動選擇絕對坐標系下 Z 軸的旋轉。考慮到人體實際運動關節角度范圍,模型建立過程中(人體上臂伸直位于矢狀面內時各關節角度為 0°,電機初始位置為 0°),設定肩關節運動范圍(屈曲伸展:—90~90°;外展內收:—90~90°;內旋外旋:—90~90°)、肘關節運動范圍(—180~0°)、機器人電機 1 運動角度范圍(—90~0°)和機器人電機 2 運動角度范圍(0~180°)。仿真運動中,末端運動軌跡運動精度在 1 mm。機械臂依據實際機械臂長度建模,人體大臂小臂建模長度參照人體工學 95% 分位數據設定:機械臂大臂長度 400 mm,機械臂小臂長度 300 mm,人體大臂長度 340 mm,人體小臂加手掌部分長度 360 mm。
為了研究人體肩肘運動關節的主動活動度對末端運動區域范圍的影響,我們采用反向仿真的方式進行動作仿真,即通過設定末端運動軌跡,選擇對機器人的兩個自由度進行運動學參數驅動,從而反算出人體上肢的肩肘關節運動角度,再根據仿真結果,分析肩關節、肘關節活動度對末端運動軌跡的影響。人機整體建模簡化過程中,將肘關節的空間運動簡化為平面運動,會使得模型仿真運動與患者的真實運動存在差異,使仿真得到的肩肘關節運動角度與實際運動過程中的肩肘關節運動角度在數值上存在一定差異,但可以通過關節角度相關性分析來確定其仿真數據與實際運動數據的關系,從而說明模型的準確性。
3 運動仿真
在對機器人的兩個自由度進行驅動時,首先要解決串聯機構逆運動學求解問題。人體上肢骨骼由肱骨與尺骨、橈骨三部分構成,肱骨與尺骨、橈骨連接構成肘關節。由于肱骨的內外兩個上髁、鷹嘴窩和尺骨上的鷹嘴突起的存在,限制了肘關節的伸展角度,從而使得人體上肢在運動過程中小臂始終處于大臂的前面[16]。通過模擬人體上肢運動過程中大臂與小臂的運動特點,來解決串聯型機構逆運動學問題。
3.1 機構運動逆運動學
二連桿串聯型機器人運動簡圖如圖 3 所示。
圖3
二連桿串聯型上肢康復機器人運動學模型
Figure3.
Kinematic model of series end-effector upper limb rehabilitation robot
根據人體大臂小臂的運動特點,確定運動角度
。由末端運動軌跡(xp,yp)可計算出機器人兩個驅動關節的轉角
和
。
3.2 Simulink 模型運動仿真
將運動學計算與 Simulink 中建立的人機整體模型結合,運動學參數作為 Simulink 模型的輸入數據,進行人機整體運動學仿真計算。仿真計算過程中以實現接觸端運動軌跡為目標,記錄在對應軌跡下的肩關節三軸運動角度及肘關節運動角度。畫圓動作是機器人運動訓練過程中普遍采取的訓練內容,是肩關節、肘關節協調運動的典型動作[19]。選取接觸端畫圓軌跡進行仿真分析,以畫圓半徑作為同一運動平面的變量,分析肩關節、肘關節的運動情況。
3.2.1 接觸端畫圓軌跡半徑不同時,上肢肩關節、肘關節運動情況
模型運動過程中以實現人機接觸端以順時針運動的方式完成同一起點不同畫圓半徑的運動軌跡為目標,分析肩關節、肘關節運動過程中的角度變化,如圖 4 所示。運動過程中肩關節 X 軸 Y 軸的旋轉動作小于 1°,而 Z 軸旋轉動作幅度明顯大于 X 軸與 Y 軸動作,肩關節的 Z 軸旋轉的運動曲線呈非對稱正弦曲線變化,并且隨著畫圓半徑的增加非對稱性增強;而肘關節的運動,則呈現單峰對稱變化。仿真模擬受試者右側上臂進行訓練的過程,選取受試者坐位正視前方姿態下,正前方的點作為起始運動點。畫圓運動過程中,肩關節由外展向內收過渡,并且由于初始運動動作肩關節已處于外展狀態,因此動作過程中肩關節的旋轉角度呈現不對稱性,并且隨著畫圓半徑的不斷變大,其非對稱性更加明顯——肩關節外展動作在動作完成過程中的比例明顯變大。相對于肩關節的運動不對稱性,肘關節呈現出良好的單峰對稱性。在畫圓過程中,肘關節一直處于伸展的狀態。
圖4
同一運動平面下,末端畫圓半徑不同時肩關節、肘關節運動曲線
Figure4.
Angles of shoulder and elbow joints during different circle drawing tasks on one plane
3.2.2 不同訓練平面,相同半徑軌跡下肩關節、肘關節的運動情況
實際臨床訓練中,肩關節、肘關節處于空間運動,但在建模過程中將肘關節的空間運動簡化成平面運動。為了研究這種建模簡化方式對肩關節、肘關節運動情況的影響,以肩關節、肘關節運動平面的高度差作為變量,分析在不同訓練平面下,相同的運動軌跡肩關節、肘關節的運動角度差異性(仿真過程中以 r = 100 mm 圓形軌跡為例)。
通過圖 5 中肩關節、肘關節的角度變化可知,在不同運動平面運動時,其肩關節運動形式與肘關節運動形式沒有差異。當末端運動軌跡相同時,訓練平面不影響肩關節、肘關節的運動情況。除此之外,我們發現肩關節在內旋外旋以及屈曲伸展方向的運動角度遠小于 1°,可忽略不計,即可認為在訓練平面確定后,人體肩關節在內旋外旋與屈曲伸展方向均不產生運動,僅存在外展內收方向上的運動。
圖5
不同訓練平面 r = 100 mm 圓形軌跡繪制動作下的肩關節、肘關節運動曲線
Figure5.
Angles of shoulder and elbow joints during the same circle drawing task (r = 100 mm) in different planes
訓練平面的不同對肩關節的初始姿態存在明顯的影響,如表 1 所示。不同的訓練高度差對肩關節內旋外旋與屈曲伸展的角度有明顯的影響,而對于外展內收的運動角度沒有影響。這說明在空間運動中,運動訓練平面的選擇主要取決于肩關節的屈曲伸展與內旋外旋的運動自由度,而肩關節外展內收的運動角度對訓練平面的設定沒有影響。
綜合考慮訓練平面以及末端繪制軌跡對肩關節、肘關節運動的影響,可以得到以下結論:訓練平面的不同會引起肩關節內旋外旋以及屈曲伸展角度的變化,但不影響肩關節的外展內收動作。而在平面畫圓動作中,肩關節主要呈現外展內收動作,并且隨著運動半徑的增大,外展動作在運動周期中所占比例增大,肘關節在整個運動過程中呈現伸展運動,配合肩關節共同完成末端軌跡的繪制工作。
4 模型驗證
為了驗證模型仿真的正確性與合理性,采集訓練過程中受試者的肩肘關節運動角度進行對比說明。通過將健康受試者在畫圓運動軌跡下的肩肘關節運動角度與仿真分析得到的關節運動角度進行相關性分析,驗證模型的準確性。
實驗中,招募 9 名健康受試者,均為男性,年齡(27.17 ± 9.27)歲,上肢長度(66.12 ± 2.51)cm[大臂長度(32.00 ± 1.25)cm,小臂長度(34.12 ± 2.24)cm],調整座椅高度,實現肩關節與肘關節所在平面高度差為 225 mm,進行人機接觸端圓形軌跡繪制運動。受試者測試實驗在國家康復研究中心附屬醫院科研室進行,由康復研究中心附屬醫院進行倫理審核,每位受試者在測試前告知詳細的測試方案與測試目的,并簽署知情同意書。運動過程中,采用 Vicon(VICON MXULTRANET HD,Oxford Metrics Ltd.,英國)三維動態捕捉系統的 8 個紅外攝像儀對肩肘關節的運動角度進行采集。將采集到的肩關節、肘關節運動角度與 Simulink 仿真獲得的運動角度進行線性相關性分析。
受試者在實際的空間動作過程中并未對肘關節的運動平面進行嚴格的固定限制,即肘關節處于空間運動而非平面運動,肩關節、肘關節所在平面的高度差存在變化,在實際的運動過程中肩關節會出現屈曲伸展與內旋外旋的角度變化。
基于前面的分析可知,訓練平面對肩關節的內旋外旋與屈曲伸展動作有直接影響,即當訓練平面確定后,其肩關節的內旋外旋與屈曲伸展角度即已確定。仿真分析過程中選定了運動平面,因此肩關節只出現外展內收動作,其他兩個自由度的動作在運動過程中保持不變。
因此,將仿真過程中肩關節外展內收的運動角度及肘關節的屈曲伸展角度與實驗采集過程中獲得的對應角度進行相關性分析,以驗證模型對平面運動過程仿真的準確性。進行相關性分析時,采用皮爾森兩變量相關性判斷方法,并進行雙向顯著性檢驗,結果如表 2 所示。
相關性分析結果顯示,Simulink 模型仿真獲得的肩關節外展內收的運動角度及肘關節屈曲伸展的運動角度與實驗過程中采集到的對應數據呈正相關,從而證明,可以由仿真獲得的肩關節、肘關節運動角度模擬實際平面運動過程中的關節角度。
5 函數擬合
末端牽引式上肢康復機器人進行訓練時,以實現末端設定軌跡為主要訓練內容,其中設定的訓練幅度成為機器人運動訓練是否有效的重要決定因素。因此,如何根據受試者的關節自由度情況確定受試者所能承受的最大訓練幅度成為訓練過程中需要解決的重要問題。
由前面的分析可知,在 Simulink 模型中可以對平面運動過程中肩關節外展內收的運動角度以及肘關節屈曲伸展的運動角度進行有效的仿真。因此可以利用 Simulink 模型,根據末端運動軌跡直接求出肩關節與肘關節的運動幅度。反過來,根據模型計算角度與末端運動軌跡參數進行其相互關系的函數擬合,從而實現根據運動幅度確定其末端運動軌跡參數,可以為實際的機器人運動訓練中參數的設定提供參考。
增加前面分析過程中畫圓半徑的組數,獲得 10 組畫圓半徑與肩肘關節角度的數據,進行三個參數間的線性擬合分析,獲得其函數方程如下:
|
其中,y 為畫圓半徑;x1 為肩關節外展內收主動運動范圍;x2 為肘關節屈曲伸展主動運動范圍。三個參數間線性函數擬合程度良好,R2 = 0.99(F = 1 188.466,P<0.005)。
根據函數方程(1),我們即可由肩關節與肘關節的 ADOF 得到其末端訓練軌跡的最大畫圓半徑,在機器人訓練過程中進行參數設定。
考慮到建模過程中采用 95% 分位數據建立人機整體模型,該擬合函數的適應人群為 18~60 歲成年男性。
6 結論
本文通過對二連桿串聯型上肢康復機器人與人體上肢進行 Simulink 整體建模,分析了不同訓練平面以及不同訓練軌跡對肩關節、肘關節活動的影響。仿真分析表明,訓練平面的確定與肩關節屈曲伸展與外旋內旋的運動角度有關,而接觸端平面活動區域則由肩關節外展內收與肘關節屈曲伸展活動范圍綜合確定。并且,根據仿真結果,本文擬合了人機接觸端平面畫圓半徑與肩關節、肘關節運動范圍的線性函數關系,可以根據受試者肩關節、肘關節的主動活動度確定其訓練活動范圍,為牽引式上肢康復機器人訓練參數的設定提供依據。本文旨在通過末端牽引式上肢康復機器人平面運動人機整體模型,確定末端活動軌跡與人體肩關節、肘關節活動度之間的量化關系,從而為康復訓練內容的制定提供量化參考依據,為每一位患者提供個性化康復訓練。文中對于運動速度與加速度等內容未進行進一步分析,在后續研究訓練內容與患者力量量化關系中需要加以討論與分析。