帕金森病(PD)患者的運動功能障礙是其主要的臨床癥狀和診斷依據。本文共招募 30 名受試者,其中包括 15 例 PD 患者(PD 組)和 15 例健康受試者(對照組),然后將 5 個慣性傳感器節點分別佩戴在受試者的四肢和腰部,通過提取和分析受試者在 6 個范式動作下的加速度、角速度信號,得到 20 個評估不同身體部位運動功能的定量指標,包含動作的幅度、頻率以及疲勞程度等信息。通過對兩組受試者的數據進行對比分析,使用誤差反向傳播(BP)神經網絡進行自動判別并預測患者臨床量表評分。最終統計結果表明,兩組受試者的多數指標的差異均有統計學意義;10 次 5 折交叉驗證表明,BP 神經網絡對兩個受試組的分類準確率達 90%,對 PD 組的亨-雅(H-Y)分期和統一帕金森氏病評分量表運動功能(UPDRS Ⅲ)評分的預測準確率分別為 72.80% 和 68.64%。該研究表明了利用可穿戴設備來對 PD 患者運動癥狀進行定量評估的可行性,文中所獲得的定量指標對于今后的相關研究也具有一定的參考價值。
引用本文: 沈天毓, 王計平, 郭立泉, 白啟帆, 張惠鈞, 王守巖, 熊大曦. 利用可穿戴設備對帕金森病患者運動功能進行量化評估. 生物醫學工程學雜志, 2018, 35(2): 206-213. doi: 10.7507/1001-5515.201704037 復制
版權信息: ?四川大學華西醫院華西期刊社《生物醫學工程學雜志》版權所有,未經授權不得轉載、改編
引言
帕金森病(Parkinson’s disease,PD)是一種神經系統退行性疾病,在臨床上表現出的運動癥狀主要包括震顫、肌強直、運動障礙和運動遲緩等[1-2]。隨著人口老齡化問題的日益嚴重,PD 發病率也逐年增高,給患者家庭和整個社會都帶來沉重的負擔[3]。對 PD 的臨床診斷通常使用一系列量表如統一帕金森氏病評分量表(unified Parkinson’s disease rating scale,UPDRS)來進行判定[4],將這些量表用于 PD 診斷雖然簡單易行但容易存在主觀偏差和分級診斷的“天花板效應”[5],導致得到的分值難以準確地反映患病情況。而基于醫學傳感器的定量評估則是一種較為客觀的評估方法,其中對運動功能的檢測是其主要的檢測項目。它不受檢測者主觀因素的影響,能敏感地發現運動功能的輕微改變,提高診斷的準確性,可用于 PD 早期診斷、病情評估,亦可對睡眠改善、藥物治療效果等進行評價[6-7]。
隨著傳感技術和無線通信技術的發展,可穿戴設備已被越來越多地應用到了 PD 的定量評定上,其中利用慣性傳感器獲得加速度和角速度信號的應用最為廣泛。汪豐等[8]設計了一套基于穿戴式無線傳感器網絡的運動功能評價系統,通過計算人體上下肢和軀干的運動參數,包括動作的幅度、頻率、角度等信息來評價 PD 患者運動的協調性和對稱性,然而該系統缺少對動作疲勞程度和身體平衡能力的評估。Espay 等[9]通過計算 PD 患者在動作前期和后期的幅度變化評估動作的疲勞程度,但沒有結合其他定量指標建立一個患病程度的判別模型。Rigas 等[10]和 Sterpi 等[11]用可穿戴式慣性傳感器來評估 PD 患者的震顫和肌強直癥狀,完成了對正常和患病受試者的自動分類,并建立了不同震顫類型的判別模型,但沒有研究患者的運動障礙、運動遲緩等癥狀。總體來說,目前國內外基于慣性傳感器的 PD 定量評估研究已經在臨床癥狀檢測、療效評估上得到了初步的應用[12-13],但多數研究只是針對單一的運動癥狀或身體部位,缺乏多部位、多指標的定量評估[14]。這與 PD 診斷標準中對運動功能評定的要求相比還有一定差距[15]。
針對以上問題,本文采用 5 個可穿戴的慣性傳感器節點分別佩戴在 PD 患者的雙側上肢、雙側下肢和腰部來構建一個覆蓋全身主要運動部位的傳感器網絡;本文規定的試驗范式動作是根據 UPDRS 第三部分(UPDRS Ⅲ)運動功能評定條目進行制定的,更符合臨床診斷的需求;然后進一步通過多指標的計算和誤差反向傳播(back propagation,BP)神經網絡算法對 30 名受試者(15 名健康受試、15 名 PD 患者)進行運動功能定量評估,最終實現對 PD 患者運動功能的準確全面地定量評定。因此,本文的研究可以證明利用可穿戴設備來對 PD 患者運動癥狀進行定量評估的可行性,文中所獲得的定量指標對于今后的相關研究也具有一定的參照價值。
1 設備和方法
1.1 多節點可穿戴慣性傳感器
本文采用 5 個可穿戴式傳感器節點分別佩戴在受試者的雙側上肢、雙側下肢和腰部,以獲取人體主要運動部位的運動信號,如圖 1 所示。每個傳感器節點尺寸為 39 × 33 × 16 mm3,平均重量為 18 g。節點硬件電路主要包括傳感器模塊、電源模塊和控制器模塊[16]。為了減小節點的體積和重量,傳感器模塊選用 9 軸姿態傳感芯片 MPU9250(InvenSense Inc.,美國),采樣頻率 fs 為 100 Hz,可以同時記錄三軸加速度、三軸角速度及三軸磁場信號。其中加速度量程為 ± 16 g,分辨率為 0.48 mg/LSB;陀螺儀量程為 ± 1 000 (°)/s,分辨率為 0.06 (°)/s ·LSB;磁力計量程為 ± 4 800 μT,分辨率為 0.63 μT/LSB。電源采用鋰電池供電。控制器模塊采用無線微控制芯片 CC3200(TexasInstruments Inc.,美國),主要功能包括低功耗電源管理和無線局域網(wireless fidelity,Wi-Fi)數據傳輸,不僅能保證設備的長時程工作,還能通過 Wi-Fi 技術實現運動數據的大范圍無線通信和組網。試驗時使用彈性綁帶將 5 個傳感器節點分別固定在受試者左手、右手、左腿、右腿和腰部,以確保節點不會發生相對位移或影響運動。傳感器節點的實物圖以及在人體上對應的穿戴位置如圖 1 所示。
 圖1
多節點可穿戴慣性傳感器
Figure1.
Multiple-node wearable inertial sensors
圖1
多節點可穿戴慣性傳感器
Figure1.
Multiple-node wearable inertial sensors
1.2 臨床試驗
本文試驗共招募了 30 名受試者,其中 15 名 PD 患者,定義為:PD 組,包含男性 8 名,女性 7 名,年齡(58.7 ± 7.5)歲,身高(164.9 ± 6.7)cm,體重(68.3 ± 10.9)kg,臨床醫生給出的亨-雅(Hoehn-Yahr,H-Y)分期為 1~3 期,UPDRS Ⅲ 評分為 6~28 分。PD 組的基本信息及臨床量表信息如表 1 所示。對照組相應招募了 15 位正常健康受試者,其中男性受試者 11 名,女性受試者 4 名,年齡(25.1 ± 1.8)歲,身高(168.1 ± 6.5)cm,體重(62.2 ± 8.7)kg,無運動障礙類相關疾病。臨床試驗在蘇州大學附屬第二醫院進行,由當地倫理委員會審批通過,且經過了受試者及其家屬的知情同意。
試驗時,受試者需完成規定的范式動作并錄像,傳感器節點將運動信號通過 Wi-Fi 實時傳送到電腦上位機顯示并保存。試驗的 6 個范式動作參照 UPDRS Ⅲ 的運動功能評定部分,并與臨床醫生討論后制定,每兩個動作之間有 1~2 min 的休息時間。6 個范式動作依次為:
(1)10 m 往返:受試者靜止端坐在椅子上,起立以正常步速向前行走 10 m 后,繞標記點轉身返回,坐回椅子保持靜止;
(2)10 m 往返雙任務:試驗人員指定一個 90 以上的數字,受試者完成 10 m 往返任務的同時從該數字開始每次減 3 或減 7 報數,若報錯數字不影響繼續行走;
(3)手部輪替:受試者靜坐在椅子上平舉雙臂,然后左、右手同時以最快速度,最大幅度完成 15 s 的連續旋前、旋后動作;
(4)靜坐抬腿:受試者靜坐在椅子上,先用左腳連續快速踩上踏板的標記位置(高度固定為 11.5 cm),15 s 后停止。完成后休息 1~2 min,換右腳完成相同的動作流程;
(5)睜眼站立:受試者雙腳并攏,雙臂自然下垂,身體不接觸任何物體,保持睜眼站立 1 min;
(6)閉眼站立:受試者雙腳并攏,雙臂自然下垂,身體不接觸任何物體,保持閉眼站立 1 min。
1.3 數據分析
1.3.1 信號預處理
將傳感器節點采集到的X、Y、Z三軸加速度和角速度信號進行窗長為 5 的中值濾波,消除孤立的噪聲點,然后采用帶通濾波(0.1~12 Hz)去除低頻自主運動和高頻噪聲影響。對于 10 m 往返、10 m 往返雙任務、手部輪替、靜坐抬腿的 4 個動作,通過計算信號方差選取出三軸角速度信號中信噪比最大的一軸進行分析。
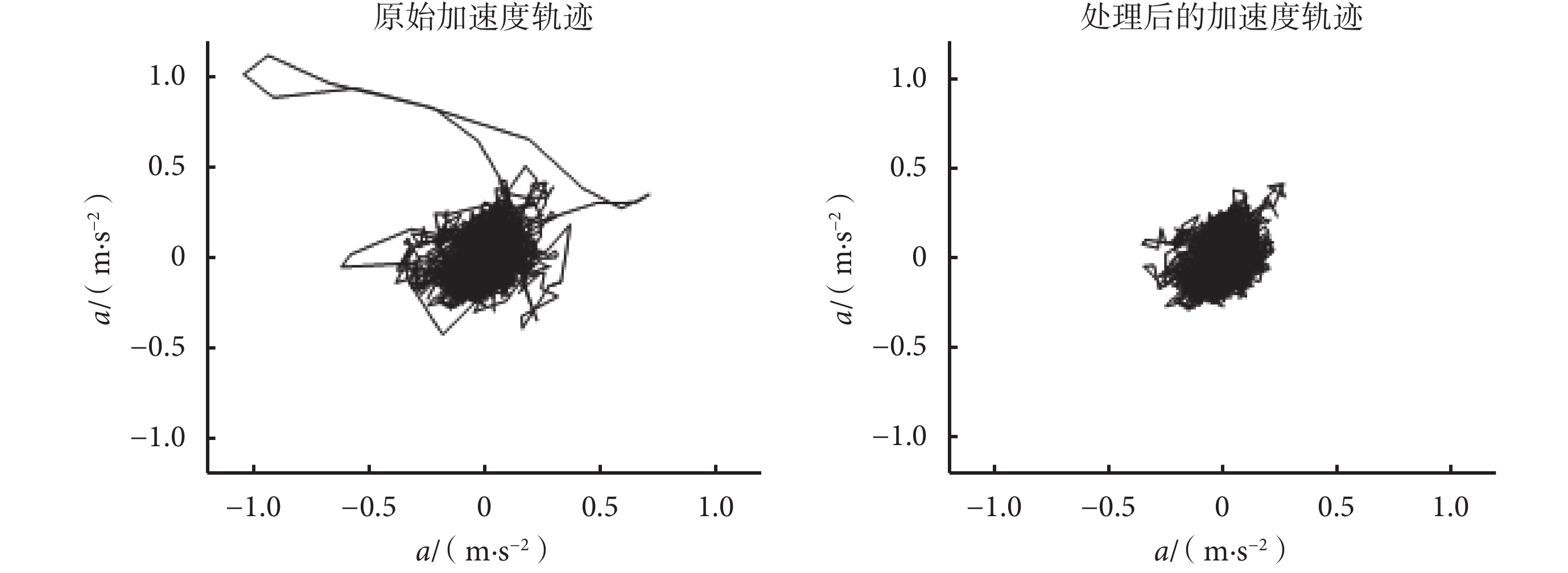
對于睜眼站立、閉眼站立兩個動作,由于只考慮水平面的晃動情況,故采用腰部傳感器節點水平面X、Y兩軸的加速度信號進行分析。先對信號進行去趨勢處理以消除偏移,并繪制出水平面上腰部節點的加速度軌跡圖。由于個別受試者在站立過程中受外界干擾存在異常晃動,導致部分加速度信號出現大幅度波動,所以用如下算法移除這部分信號來減小誤差:對X、Y兩軸的加速度信號 ax(t),ay(t)分別處理。以 ax(t)為例,將信號按 1 s(100 點)的窗長進行分幀,計算每一幀內信號的標準差 σ(ax(i))和除該幀外其余信號的標準差 σ(ax) 做判定,若 σ(ax(i)) ≥ 2σ(ax),則將該幀信號 ax(i)移除。移除異常值前后的腰部節點加速度軌跡如圖 2 所示。
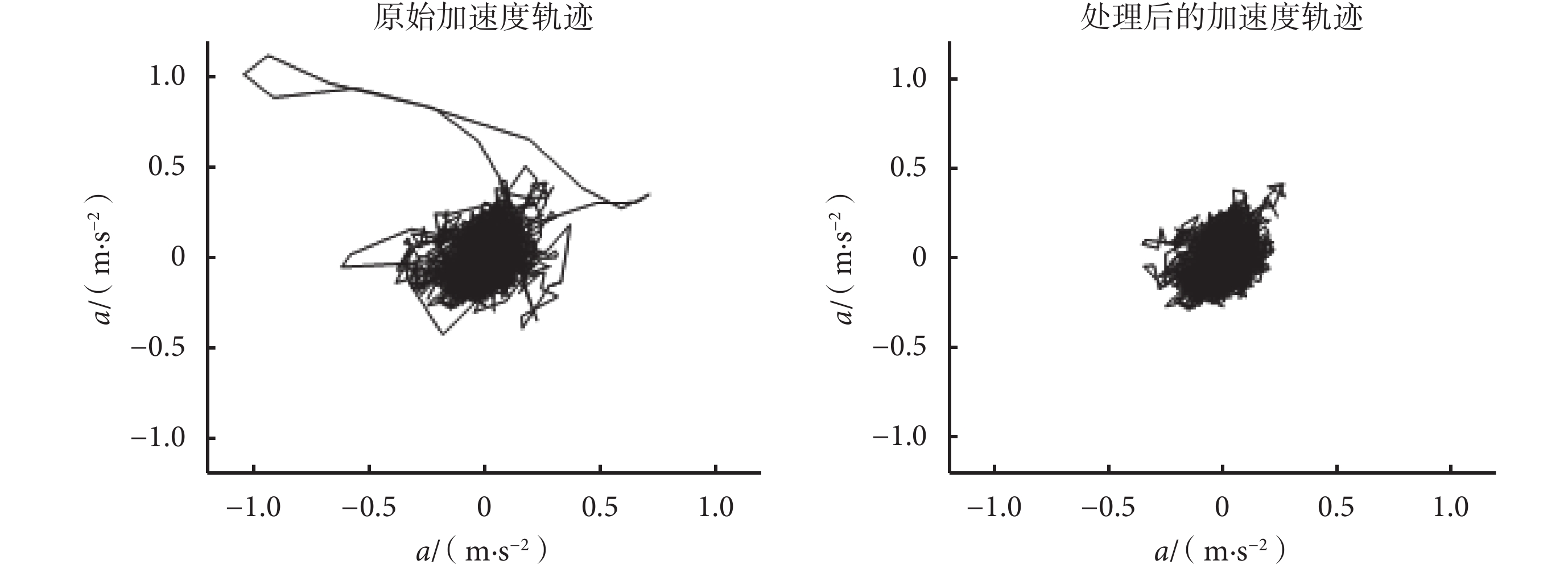 圖2
移除異常值前后的腰部節點加速度軌跡
Figure2.
The acceleration trail of the waist node before and after removing outliers
圖2
移除異常值前后的腰部節點加速度軌跡
Figure2.
The acceleration trail of the waist node before and after removing outliers
1.3.2 各范式動作數據分析
對于 10 m 往返和 10 m 往返雙任務,采用左腿、右腿和腰部節點的角速度信號 v(t)進行分析。以左腿節點為例,首先計算出信號的均值 E(v(t))和標準差 σ(v(t)),如式(1)所示,得出判斷閾值
 ,將信號 v(t)中每一時刻的值逐個與閾值
,將信號 v(t)中每一時刻的值逐個與閾值
 比較,若一段信號超過了閾值
比較,若一段信號超過了閾值
 ,則記為步數 b+1,并記錄下這一小段信號中最大值所在時刻 t(b)。然后對信號 v(t)求積分,即得到該軸角度的信號 A(t),在之前記錄的 t(b)和 t(b+1)中找到角度信號 A(t)的最大值所在時刻
,則記為步數 b+1,并記錄下這一小段信號中最大值所在時刻 t(b)。然后對信號 v(t)求積分,即得到該軸角度的信號 A(t),在之前記錄的 t(b)和 t(b+1)中找到角度信號 A(t)的最大值所在時刻
 和最小值所在時刻
和最小值所在時刻
 ,如式(2)、(3)所示,可以分別計算出這一步左腿的步幅 A(b)和步頻 F(b):
,如式(2)、(3)所示,可以分別計算出這一步左腿的步幅 A(b)和步頻 F(b):
 |
 |
 |
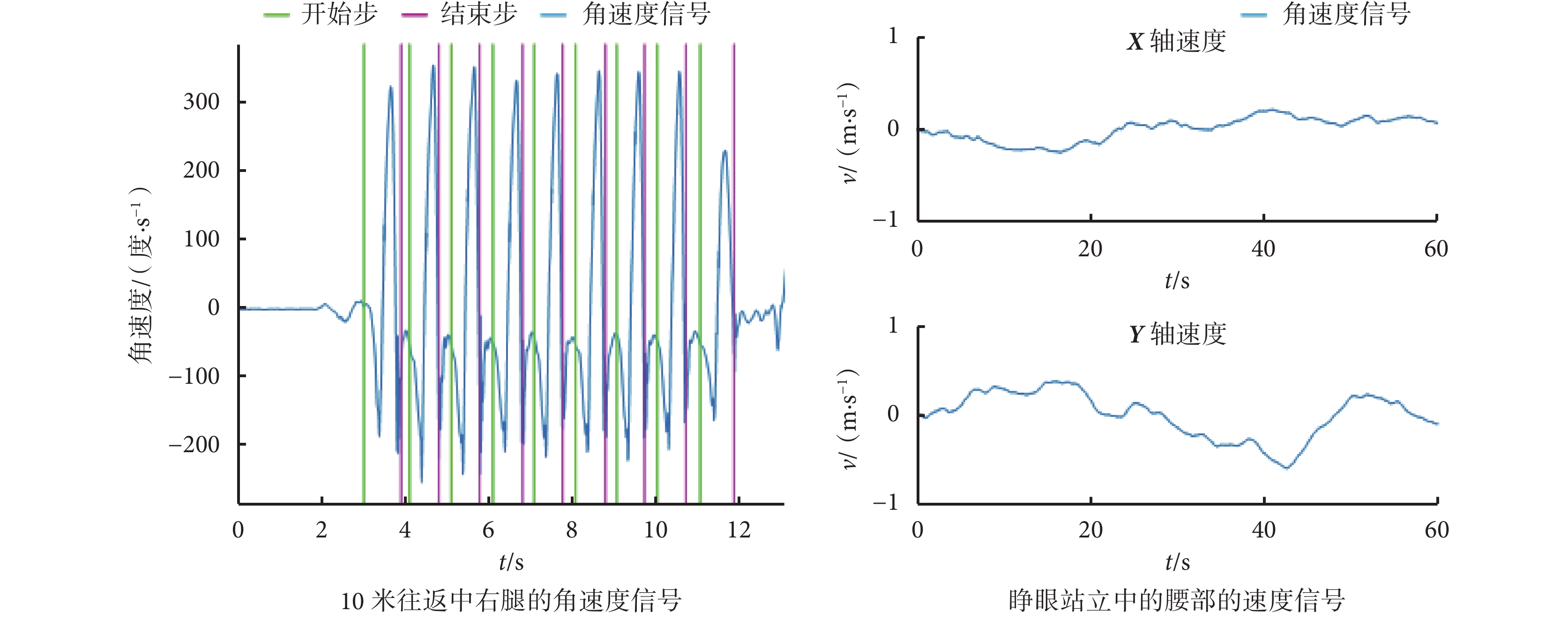
最后對每一步的步幅和步頻求取平均值,得到該受試者在 10 m 往返或 10 m 往返雙任務下左腿的步幅和步頻。對腰部節點的角速度信號 v(t)求積分得到角度信號 A(t),由于往返行走中的轉身動作,A(t)的值會從 0° 左右升至 180° 左右,將 A(t)從 40° 變化至 140° 所需要的時間定義為轉身時間。如圖 3 左圖所示,為 10 m 往返中右腿的角速度信號(藍色曲線),從中可以看出每步的開始(綠線標注)和結束(紫線標注)時刻,此外可以得到每步的時間間隔等信息。
對于手部輪替動作,主要分析左手和右手節點的角速度信號。采用和上面計算步幅、步頻相同的算法分別得到左手和右手輪替的次數、幅度和頻率。除此之外,定義時間疲勞程度為前 5 次與后 5 次手部輪替頻率的比值,定義幅度疲勞程度為前 5 次與后 5 次手部輪替平均幅度的比值,數值越大則表示疲勞程度越大。對于靜坐抬腿動作,主要分析左腿和右腿節點的角速度信號,采用以上相同的算法分別計算出左腿和右腿的抬腿次數、抬腿頻率。由于抬腿的幅度固定,只計算其時間疲勞程度,定義為前 5 次與后 5 次抬腿頻率的比值。
對于睜眼站立和閉眼站立,主要分析腰部節點在水平面X、Y兩軸的加速度信號 ax(t)和 ay(t)。以睜眼站立為例,先畫出水平面加速度軌跡,如式(4)所示,得到加速度的均方根(root mean square of acceleration,RMSA)(以符號 RMSA 表示)。對兩軸加速度信號分別求導和求積分后得到加加速度信號 jx(t)、jy(t)和速度信號 vx(t)、vy(t)。如式(5)、(6)所示,分別得到加加速度的均方根(root mean square of jerk,RMSJ)(以符號 RMSJ 表示)和平均速率(mean velocity,MV)(以符號 MV 表示)。如圖 3 右圖所示為睜眼站立下,腰部節點在水平面兩個方向上的速度波動情況。如表 2 所示,為對于以上各范式動作計算出的定量指標。
 |
 |
 |
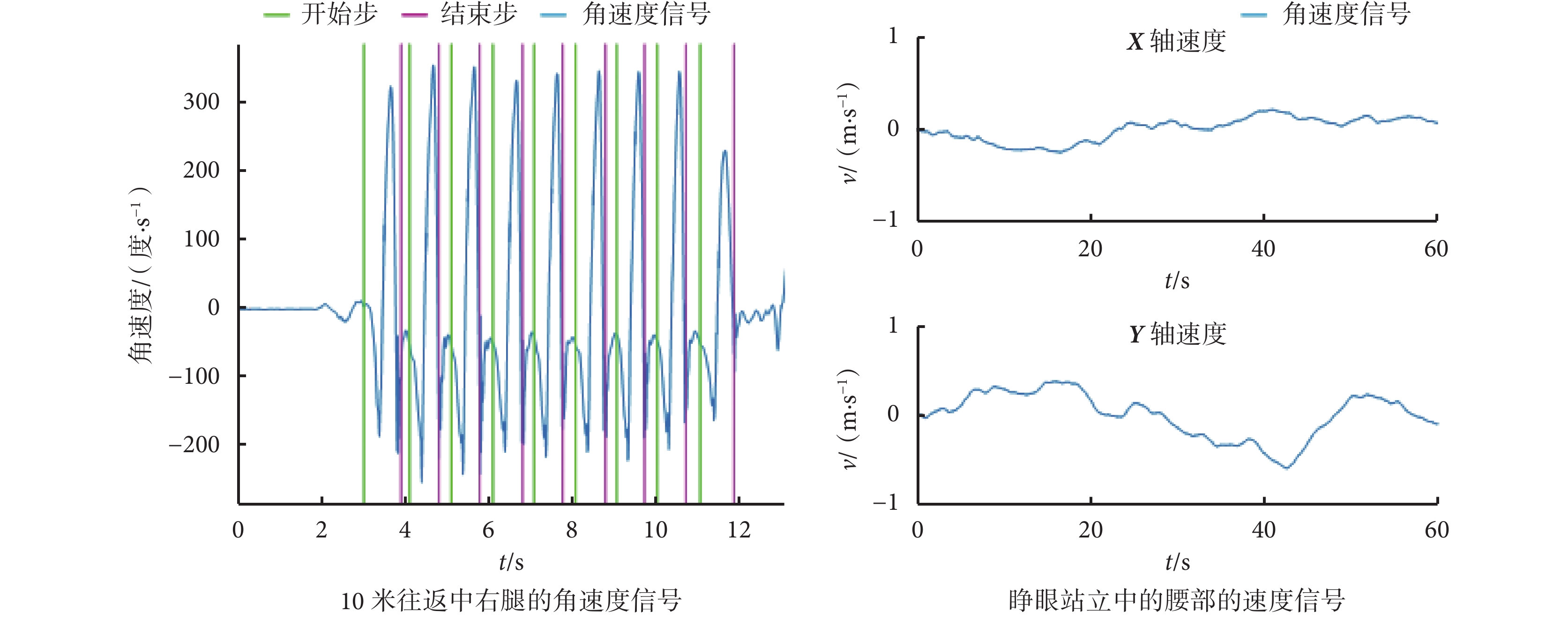 圖3
部分范式動作中的運動信號
Figure3.
The motion signals in some of the paradigm tasks
圖3
部分范式動作中的運動信號
Figure3.
The motion signals in some of the paradigm tasks
1.3.3 BP神經網絡分類及評分預測
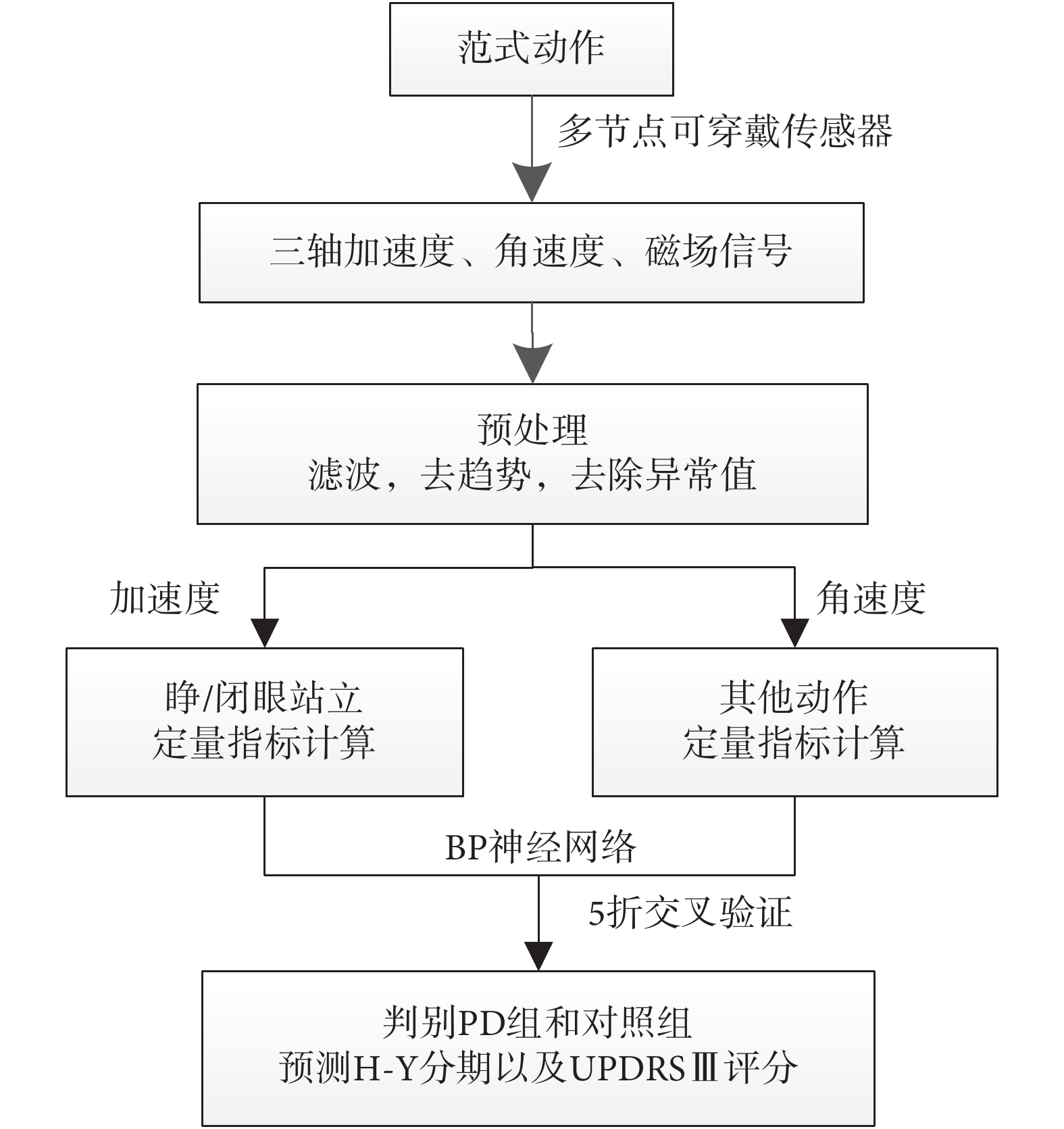
BP 神經網絡是一種多層前饋神經網絡,可根據預測誤差不斷調整網絡權值和閾值,具有自學習能力[17]。本文使用 BP 神經網絡將多個定量指標通過樣本的訓練自動建立出最佳的輸出判別模型,從而進行 PD 患者的自動識別以及 PD 臨床量表評分的預測。如表 2 所示,共提取出 20 個和運動相關的定量指標,將它們構建為 1 × 20 維的特征矩陣,為避免因為輸入輸出數量級差別較大而造成的網絡預測誤差,進行了歸一化處理。首先進行對照組和 PD 組的自動判別,使用特征矩陣作為輸入,受試者類別作為標簽(PD 組為 1,對照組為 2)來訓練網絡進行分類。將 30 個受試者隨機劃分為 5 組,每組 6 人,每次選取 4 組作為訓練集,另外 1 組作為測試集來完成 5 折交叉驗證,共計算 10 次以提高結果可信度。接下來分別使用 15 個 PD 組受試者的 H-Y 分期以及 UPDRS Ⅲ評分作為標簽來訓練網絡,完成這兩項評分的自動預測,同樣進行 10 次 5 折交叉驗證。信號的分析以及基于 BP 神經網絡的數據分類和預測都在矩陣計算軟件 MATLAB R2015b(MathWorks Inc.,美國)上進行。對運動信號分析處理的流程如圖 4 所示。
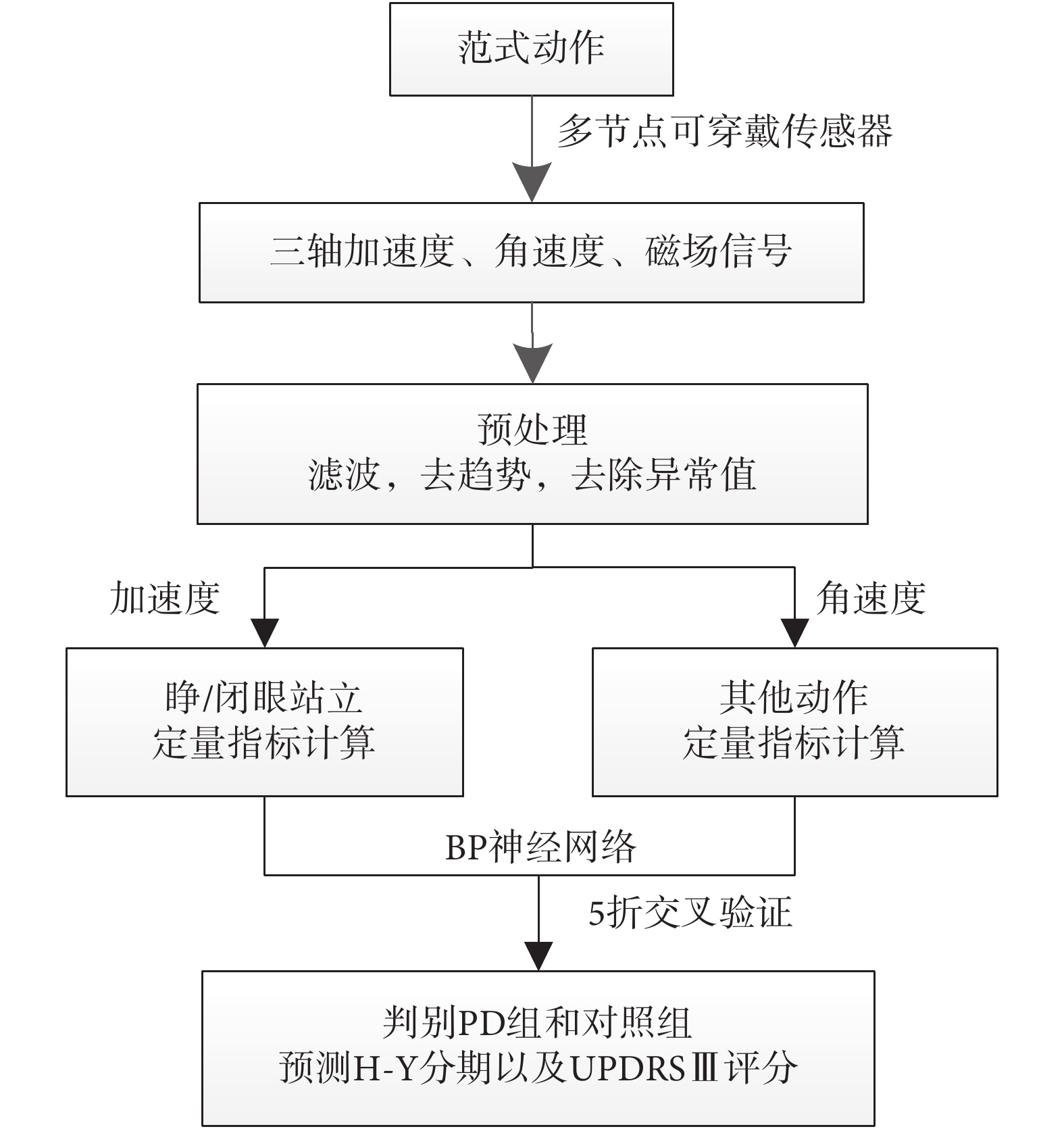 圖4
運動信號分析流程
Figure4.
A flow chart of motion signal processing
圖4
運動信號分析流程
Figure4.
A flow chart of motion signal processing
1.3.4 統計學方法
分別對左右手、左右腿的計算結果求平均得到雙側上下肢的運動定量指標。在 PD 組和對照組之間用獨立樣本 t 檢驗得到差異具有統計學意義的定量指標,在每個組內分別對 10 m 往返、10 m 往返雙任務、睜眼站立和閉眼站立的定量指標進行獨立樣本 t 檢驗。對各指標進行受試者工作特征(receiver operating characteristic,ROC)曲線分析,計算曲線下面積(area under curve,AUC)得到其診斷性能。因需綜合考慮診斷的敏感性和特異性,本文對 AUC 大于 0.7 的指標找到其最大約登指數(Youden index)的對應值作為診斷臨界值(cut-off 值)。統計分析相關運算在專業數據統計分析軟件 IBM SPSS Statistics 22(IBM Inc.,美國)上進行。
對于 BP 神經網絡的分類結果計算其準確率、敏感性和特異性。對于臨床評分的預測值,以真實評分作為標準計算其相對誤差率 = (預測評分 — 真實評分)/真實評分 × 100%,則預測的準確率 = 1 — 相對誤差率。對 10 次分類及預測結果求平均,得到最終結果。
2 結果與分析
2.1 各定量指標統計分析結果
6 個范式動作下,組間各個定量指標的計算及統計分析結果如表 3 所示,PD 組和對照組之間大多數指標的差異均具有統計學意義(P < 0.05),且部分指標 P < 0.01。這表明 PD 組和對照組相比,部分運動功能受到患病影響,如步頻變快(慌張步態)、轉身時間變長、手部輪替較慢、動作更容易疲勞等,體現出運動障礙和運動遲緩的癥狀。兩組受試者在睜、閉眼站立下的 RMSA、MV 等指標的差異,顯示出 PD 患者的身體平衡能力也受到影響。ROC 曲線分析表明,10 m 往返的步頻、轉身時間以及手部輪替的次數、頻率有著較高的診斷準確性,AUC 均大于 0.9。其他一些指標如步幅、手部輪替的幅度、抬腿次數以及睜、閉眼站立的 MV 等指標有較好的診斷價值。此外未在表中列出的結果包括:PD 組 10 m 往返雙任務的步頻、步幅均小于 10 m 往返的對應指標,轉身時間變長,其中步頻的變化差異具有統計學意義(P = 0.001);對照組也有相似結果,但各指標之間的差異沒有統計學意義。這表明認知任務會對步態造成影響,且對 PD 組的影響大于對對照組的影響。有個別定量指標的差異沒有統計學意義,這可能是因為受試者樣本量還不夠,且 PD 組部分受試者為發病較輕或者服藥后的患者。后續工作應增加試驗的樣本量,將不同患病程度的 PD 患者作為受試者來進行研究,同時研究服藥前后各患者運動功能的變化情況。
 )
Table3.
Statistical results of each quantitative parameter (
)
Table3.
Statistical results of each quantitative parameter (
 )
)
由于篇幅所限,本文并未列出各個 PD 患者的運動功能定量指標。對比患者相應的臨床量表評分,可以發現較高的 UPDRS Ⅲ 得分對應于較差的運動功能,這具體表現為定量指標的變化,如:步幅較小、轉身時間較長、翻腕及抬腿的頻率較低、站立時腰部的 MV 較大等 。而且 H-Y 分期與 PD 的發展程度有關,隨著分期的增加疾病從單側發展到雙側,并出現平衡障礙。但這一變化并不是簡單地表現為運動功能的定量變化,需要對比單側和雙側肢體的運動功能并結合腰部平衡功能的定量指標來進行評估。
2.2 BP神經網絡分類及預測結果
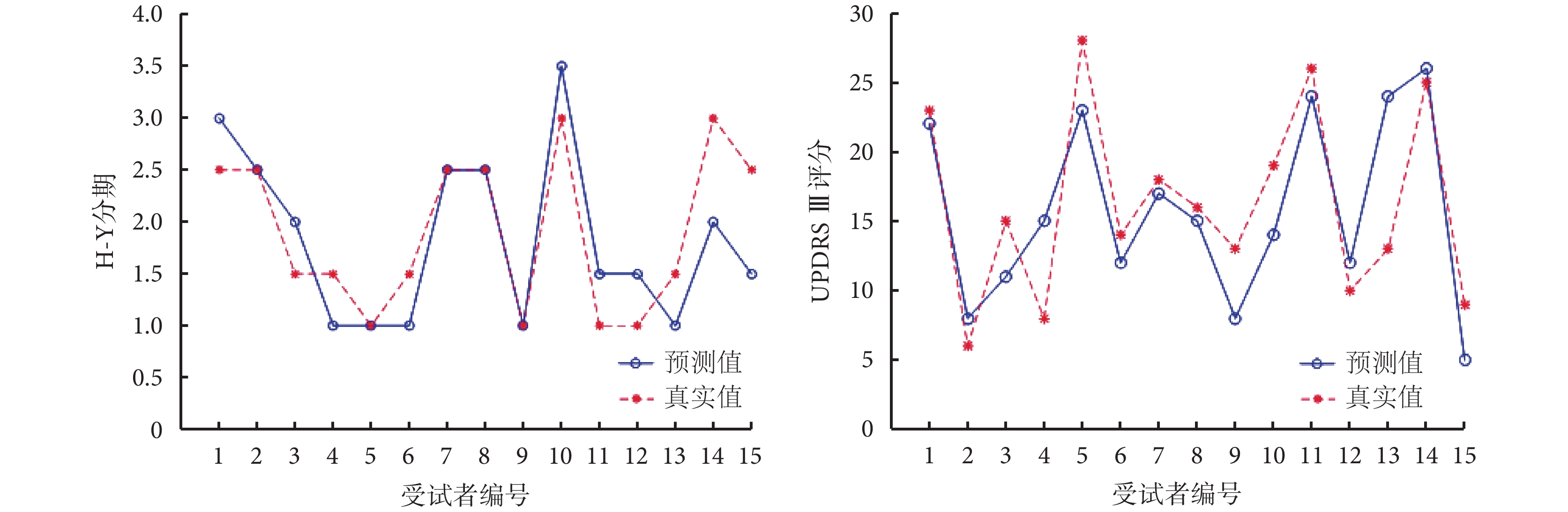
經過 10 次 5 折交叉驗證,BP 神經網絡對兩個組的分類準確率為 90.00% ± 3.85%,敏感性為 85.33% ± 8.20%,特異性為 94.67% ± 2.81%。對患者臨床 H-Y 分期和 UPDRS Ⅲ 的一次預測結果如圖 5 所示,其中藍色圓圈為預測值,紅色星號為真實值,樣本順序為隨機生成。可以看出預測值和真實值的大致趨勢相同,H-Y 分期的預測誤差在 1 期以內,UPDRS Ⅲ 的預測誤差在 10 分以內,大部分誤差保持在 5 分以內。10 次運算結果表明,BP 神經網絡對 H-Y 分期的預測準確率為 72.80% ± 5.60%,對 UPDRS Ⅲ 評分預測的準確率為 68.64% ± 2.84%。分類和預測結果表明,本文方法可以很好地區分出對照組和 PD 組,且有著較高的特異性,但由于樣本量不足和 PD 患病復雜性的影響,導致對個別患者的 H-Y 分期和 UPDRS Ⅲ評分預測誤差較大,整體的準確性還有待提高。后續工作需要進一步優化算法,選取特征,同時完善試驗動作范式使其能夠涵蓋 PD 患者不同層面的運動功能。
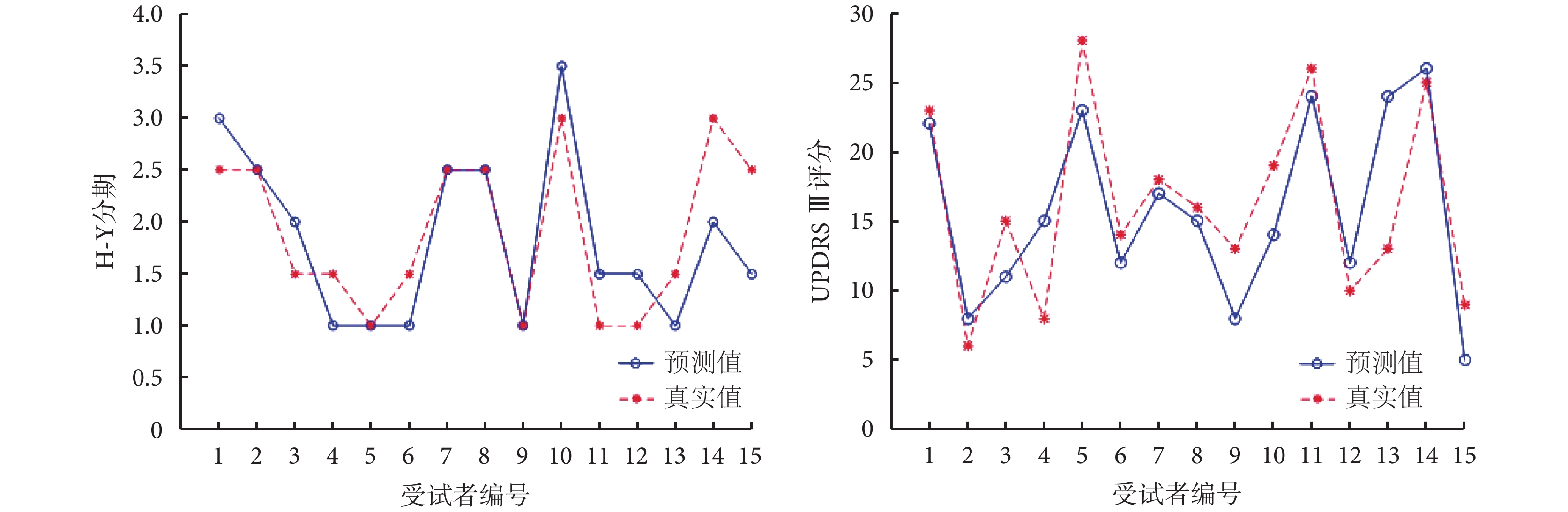 圖5
BP 神經網絡對 PD 組 H-Y 分期和 UPDRS Ⅲ 評分的預測結果
Figure5.
BP neural network prediction results for the H-Y stage and UPDRS Ⅲ score of the PD group
圖5
BP 神經網絡對 PD 組 H-Y 分期和 UPDRS Ⅲ 評分的預測結果
Figure5.
BP neural network prediction results for the H-Y stage and UPDRS Ⅲ score of the PD group
3 結論
為了客觀全面評估 PD 患者的運動癥狀,本文提出了一種基于多節點可穿戴設備來對 PD 患者運動功能進行定量評定的方法。在 6 個試驗范式動作下通過 5 個傳感器節點記錄到運動的加速度、角速度信號,提取出 20 個反映不同身體部位運動功能的定量指標,并使用 BP 神經網絡進行 PD 組和對照組的自動分類,給出與臨床評估量表相對應的量化評分。30 例 PD 組和對照組的臨床試驗結果表明,兩個組之間多數指標的差異具有統計學意義,10 次 5 折交叉驗證表明 BP 神經網絡對兩個組的分類準確率達到 90.00%,對患者組的 H-Y 分期和 UPDRS Ⅲ 評分預測的準確率分別為 72.80% ± 5.60% 和 68.64% ± 2.84%。以上結果表明,本文方法做到了對 PD 患者運動功能多個身體部位、多指標、自動化的定量評定,這對 PD 的定量評估研究以及臨床輔助診斷具有一定的參考價值。
引言
帕金森病(Parkinson’s disease,PD)是一種神經系統退行性疾病,在臨床上表現出的運動癥狀主要包括震顫、肌強直、運動障礙和運動遲緩等[1-2]。隨著人口老齡化問題的日益嚴重,PD 發病率也逐年增高,給患者家庭和整個社會都帶來沉重的負擔[3]。對 PD 的臨床診斷通常使用一系列量表如統一帕金森氏病評分量表(unified Parkinson’s disease rating scale,UPDRS)來進行判定[4],將這些量表用于 PD 診斷雖然簡單易行但容易存在主觀偏差和分級診斷的“天花板效應”[5],導致得到的分值難以準確地反映患病情況。而基于醫學傳感器的定量評估則是一種較為客觀的評估方法,其中對運動功能的檢測是其主要的檢測項目。它不受檢測者主觀因素的影響,能敏感地發現運動功能的輕微改變,提高診斷的準確性,可用于 PD 早期診斷、病情評估,亦可對睡眠改善、藥物治療效果等進行評價[6-7]。
隨著傳感技術和無線通信技術的發展,可穿戴設備已被越來越多地應用到了 PD 的定量評定上,其中利用慣性傳感器獲得加速度和角速度信號的應用最為廣泛。汪豐等[8]設計了一套基于穿戴式無線傳感器網絡的運動功能評價系統,通過計算人體上下肢和軀干的運動參數,包括動作的幅度、頻率、角度等信息來評價 PD 患者運動的協調性和對稱性,然而該系統缺少對動作疲勞程度和身體平衡能力的評估。Espay 等[9]通過計算 PD 患者在動作前期和后期的幅度變化評估動作的疲勞程度,但沒有結合其他定量指標建立一個患病程度的判別模型。Rigas 等[10]和 Sterpi 等[11]用可穿戴式慣性傳感器來評估 PD 患者的震顫和肌強直癥狀,完成了對正常和患病受試者的自動分類,并建立了不同震顫類型的判別模型,但沒有研究患者的運動障礙、運動遲緩等癥狀。總體來說,目前國內外基于慣性傳感器的 PD 定量評估研究已經在臨床癥狀檢測、療效評估上得到了初步的應用[12-13],但多數研究只是針對單一的運動癥狀或身體部位,缺乏多部位、多指標的定量評估[14]。這與 PD 診斷標準中對運動功能評定的要求相比還有一定差距[15]。
針對以上問題,本文采用 5 個可穿戴的慣性傳感器節點分別佩戴在 PD 患者的雙側上肢、雙側下肢和腰部來構建一個覆蓋全身主要運動部位的傳感器網絡;本文規定的試驗范式動作是根據 UPDRS 第三部分(UPDRS Ⅲ)運動功能評定條目進行制定的,更符合臨床診斷的需求;然后進一步通過多指標的計算和誤差反向傳播(back propagation,BP)神經網絡算法對 30 名受試者(15 名健康受試、15 名 PD 患者)進行運動功能定量評估,最終實現對 PD 患者運動功能的準確全面地定量評定。因此,本文的研究可以證明利用可穿戴設備來對 PD 患者運動癥狀進行定量評估的可行性,文中所獲得的定量指標對于今后的相關研究也具有一定的參照價值。
1 設備和方法
1.1 多節點可穿戴慣性傳感器
本文采用 5 個可穿戴式傳感器節點分別佩戴在受試者的雙側上肢、雙側下肢和腰部,以獲取人體主要運動部位的運動信號,如圖 1 所示。每個傳感器節點尺寸為 39 × 33 × 16 mm3,平均重量為 18 g。節點硬件電路主要包括傳感器模塊、電源模塊和控制器模塊[16]。為了減小節點的體積和重量,傳感器模塊選用 9 軸姿態傳感芯片 MPU9250(InvenSense Inc.,美國),采樣頻率 fs 為 100 Hz,可以同時記錄三軸加速度、三軸角速度及三軸磁場信號。其中加速度量程為 ± 16 g,分辨率為 0.48 mg/LSB;陀螺儀量程為 ± 1 000 (°)/s,分辨率為 0.06 (°)/s ·LSB;磁力計量程為 ± 4 800 μT,分辨率為 0.63 μT/LSB。電源采用鋰電池供電。控制器模塊采用無線微控制芯片 CC3200(TexasInstruments Inc.,美國),主要功能包括低功耗電源管理和無線局域網(wireless fidelity,Wi-Fi)數據傳輸,不僅能保證設備的長時程工作,還能通過 Wi-Fi 技術實現運動數據的大范圍無線通信和組網。試驗時使用彈性綁帶將 5 個傳感器節點分別固定在受試者左手、右手、左腿、右腿和腰部,以確保節點不會發生相對位移或影響運動。傳感器節點的實物圖以及在人體上對應的穿戴位置如圖 1 所示。
圖1
多節點可穿戴慣性傳感器
Figure1.
Multiple-node wearable inertial sensors
1.2 臨床試驗
本文試驗共招募了 30 名受試者,其中 15 名 PD 患者,定義為:PD 組,包含男性 8 名,女性 7 名,年齡(58.7 ± 7.5)歲,身高(164.9 ± 6.7)cm,體重(68.3 ± 10.9)kg,臨床醫生給出的亨-雅(Hoehn-Yahr,H-Y)分期為 1~3 期,UPDRS Ⅲ 評分為 6~28 分。PD 組的基本信息及臨床量表信息如表 1 所示。對照組相應招募了 15 位正常健康受試者,其中男性受試者 11 名,女性受試者 4 名,年齡(25.1 ± 1.8)歲,身高(168.1 ± 6.5)cm,體重(62.2 ± 8.7)kg,無運動障礙類相關疾病。臨床試驗在蘇州大學附屬第二醫院進行,由當地倫理委員會審批通過,且經過了受試者及其家屬的知情同意。
試驗時,受試者需完成規定的范式動作并錄像,傳感器節點將運動信號通過 Wi-Fi 實時傳送到電腦上位機顯示并保存。試驗的 6 個范式動作參照 UPDRS Ⅲ 的運動功能評定部分,并與臨床醫生討論后制定,每兩個動作之間有 1~2 min 的休息時間。6 個范式動作依次為:
(1)10 m 往返:受試者靜止端坐在椅子上,起立以正常步速向前行走 10 m 后,繞標記點轉身返回,坐回椅子保持靜止;
(2)10 m 往返雙任務:試驗人員指定一個 90 以上的數字,受試者完成 10 m 往返任務的同時從該數字開始每次減 3 或減 7 報數,若報錯數字不影響繼續行走;
(3)手部輪替:受試者靜坐在椅子上平舉雙臂,然后左、右手同時以最快速度,最大幅度完成 15 s 的連續旋前、旋后動作;
(4)靜坐抬腿:受試者靜坐在椅子上,先用左腳連續快速踩上踏板的標記位置(高度固定為 11.5 cm),15 s 后停止。完成后休息 1~2 min,換右腳完成相同的動作流程;
(5)睜眼站立:受試者雙腳并攏,雙臂自然下垂,身體不接觸任何物體,保持睜眼站立 1 min;
(6)閉眼站立:受試者雙腳并攏,雙臂自然下垂,身體不接觸任何物體,保持閉眼站立 1 min。
1.3 數據分析
1.3.1 信號預處理
將傳感器節點采集到的X、Y、Z三軸加速度和角速度信號進行窗長為 5 的中值濾波,消除孤立的噪聲點,然后采用帶通濾波(0.1~12 Hz)去除低頻自主運動和高頻噪聲影響。對于 10 m 往返、10 m 往返雙任務、手部輪替、靜坐抬腿的 4 個動作,通過計算信號方差選取出三軸角速度信號中信噪比最大的一軸進行分析。
對于睜眼站立、閉眼站立兩個動作,由于只考慮水平面的晃動情況,故采用腰部傳感器節點水平面X、Y兩軸的加速度信號進行分析。先對信號進行去趨勢處理以消除偏移,并繪制出水平面上腰部節點的加速度軌跡圖。由于個別受試者在站立過程中受外界干擾存在異常晃動,導致部分加速度信號出現大幅度波動,所以用如下算法移除這部分信號來減小誤差:對X、Y兩軸的加速度信號 ax(t),ay(t)分別處理。以 ax(t)為例,將信號按 1 s(100 點)的窗長進行分幀,計算每一幀內信號的標準差 σ(ax(i))和除該幀外其余信號的標準差 σ(ax) 做判定,若 σ(ax(i)) ≥ 2σ(ax),則將該幀信號 ax(i)移除。移除異常值前后的腰部節點加速度軌跡如圖 2 所示。
圖2
移除異常值前后的腰部節點加速度軌跡
Figure2.
The acceleration trail of the waist node before and after removing outliers
1.3.2 各范式動作數據分析
對于 10 m 往返和 10 m 往返雙任務,采用左腿、右腿和腰部節點的角速度信號 v(t)進行分析。以左腿節點為例,首先計算出信號的均值 E(v(t))和標準差 σ(v(t)),如式(1)所示,得出判斷閾值
,將信號 v(t)中每一時刻的值逐個與閾值
比較,若一段信號超過了閾值
,則記為步數 b+1,并記錄下這一小段信號中最大值所在時刻 t(b)。然后對信號 v(t)求積分,即得到該軸角度的信號 A(t),在之前記錄的 t(b)和 t(b+1)中找到角度信號 A(t)的最大值所在時刻
和最小值所在時刻
,如式(2)、(3)所示,可以分別計算出這一步左腿的步幅 A(b)和步頻 F(b):
|
|
|
最后對每一步的步幅和步頻求取平均值,得到該受試者在 10 m 往返或 10 m 往返雙任務下左腿的步幅和步頻。對腰部節點的角速度信號 v(t)求積分得到角度信號 A(t),由于往返行走中的轉身動作,A(t)的值會從 0° 左右升至 180° 左右,將 A(t)從 40° 變化至 140° 所需要的時間定義為轉身時間。如圖 3 左圖所示,為 10 m 往返中右腿的角速度信號(藍色曲線),從中可以看出每步的開始(綠線標注)和結束(紫線標注)時刻,此外可以得到每步的時間間隔等信息。
對于手部輪替動作,主要分析左手和右手節點的角速度信號。采用和上面計算步幅、步頻相同的算法分別得到左手和右手輪替的次數、幅度和頻率。除此之外,定義時間疲勞程度為前 5 次與后 5 次手部輪替頻率的比值,定義幅度疲勞程度為前 5 次與后 5 次手部輪替平均幅度的比值,數值越大則表示疲勞程度越大。對于靜坐抬腿動作,主要分析左腿和右腿節點的角速度信號,采用以上相同的算法分別計算出左腿和右腿的抬腿次數、抬腿頻率。由于抬腿的幅度固定,只計算其時間疲勞程度,定義為前 5 次與后 5 次抬腿頻率的比值。
對于睜眼站立和閉眼站立,主要分析腰部節點在水平面X、Y兩軸的加速度信號 ax(t)和 ay(t)。以睜眼站立為例,先畫出水平面加速度軌跡,如式(4)所示,得到加速度的均方根(root mean square of acceleration,RMSA)(以符號 RMSA 表示)。對兩軸加速度信號分別求導和求積分后得到加加速度信號 jx(t)、jy(t)和速度信號 vx(t)、vy(t)。如式(5)、(6)所示,分別得到加加速度的均方根(root mean square of jerk,RMSJ)(以符號 RMSJ 表示)和平均速率(mean velocity,MV)(以符號 MV 表示)。如圖 3 右圖所示為睜眼站立下,腰部節點在水平面兩個方向上的速度波動情況。如表 2 所示,為對于以上各范式動作計算出的定量指標。
|
|
|
圖3
部分范式動作中的運動信號
Figure3.
The motion signals in some of the paradigm tasks
1.3.3 BP神經網絡分類及評分預測
BP 神經網絡是一種多層前饋神經網絡,可根據預測誤差不斷調整網絡權值和閾值,具有自學習能力[17]。本文使用 BP 神經網絡將多個定量指標通過樣本的訓練自動建立出最佳的輸出判別模型,從而進行 PD 患者的自動識別以及 PD 臨床量表評分的預測。如表 2 所示,共提取出 20 個和運動相關的定量指標,將它們構建為 1 × 20 維的特征矩陣,為避免因為輸入輸出數量級差別較大而造成的網絡預測誤差,進行了歸一化處理。首先進行對照組和 PD 組的自動判別,使用特征矩陣作為輸入,受試者類別作為標簽(PD 組為 1,對照組為 2)來訓練網絡進行分類。將 30 個受試者隨機劃分為 5 組,每組 6 人,每次選取 4 組作為訓練集,另外 1 組作為測試集來完成 5 折交叉驗證,共計算 10 次以提高結果可信度。接下來分別使用 15 個 PD 組受試者的 H-Y 分期以及 UPDRS Ⅲ評分作為標簽來訓練網絡,完成這兩項評分的自動預測,同樣進行 10 次 5 折交叉驗證。信號的分析以及基于 BP 神經網絡的數據分類和預測都在矩陣計算軟件 MATLAB R2015b(MathWorks Inc.,美國)上進行。對運動信號分析處理的流程如圖 4 所示。
圖4
運動信號分析流程
Figure4.
A flow chart of motion signal processing
1.3.4 統計學方法
分別對左右手、左右腿的計算結果求平均得到雙側上下肢的運動定量指標。在 PD 組和對照組之間用獨立樣本 t 檢驗得到差異具有統計學意義的定量指標,在每個組內分別對 10 m 往返、10 m 往返雙任務、睜眼站立和閉眼站立的定量指標進行獨立樣本 t 檢驗。對各指標進行受試者工作特征(receiver operating characteristic,ROC)曲線分析,計算曲線下面積(area under curve,AUC)得到其診斷性能。因需綜合考慮診斷的敏感性和特異性,本文對 AUC 大于 0.7 的指標找到其最大約登指數(Youden index)的對應值作為診斷臨界值(cut-off 值)。統計分析相關運算在專業數據統計分析軟件 IBM SPSS Statistics 22(IBM Inc.,美國)上進行。
對于 BP 神經網絡的分類結果計算其準確率、敏感性和特異性。對于臨床評分的預測值,以真實評分作為標準計算其相對誤差率 = (預測評分 — 真實評分)/真實評分 × 100%,則預測的準確率 = 1 — 相對誤差率。對 10 次分類及預測結果求平均,得到最終結果。
2 結果與分析
2.1 各定量指標統計分析結果
6 個范式動作下,組間各個定量指標的計算及統計分析結果如表 3 所示,PD 組和對照組之間大多數指標的差異均具有統計學意義(P < 0.05),且部分指標 P < 0.01。這表明 PD 組和對照組相比,部分運動功能受到患病影響,如步頻變快(慌張步態)、轉身時間變長、手部輪替較慢、動作更容易疲勞等,體現出運動障礙和運動遲緩的癥狀。兩組受試者在睜、閉眼站立下的 RMSA、MV 等指標的差異,顯示出 PD 患者的身體平衡能力也受到影響。ROC 曲線分析表明,10 m 往返的步頻、轉身時間以及手部輪替的次數、頻率有著較高的診斷準確性,AUC 均大于 0.9。其他一些指標如步幅、手部輪替的幅度、抬腿次數以及睜、閉眼站立的 MV 等指標有較好的診斷價值。此外未在表中列出的結果包括:PD 組 10 m 往返雙任務的步頻、步幅均小于 10 m 往返的對應指標,轉身時間變長,其中步頻的變化差異具有統計學意義(P = 0.001);對照組也有相似結果,但各指標之間的差異沒有統計學意義。這表明認知任務會對步態造成影響,且對 PD 組的影響大于對對照組的影響。有個別定量指標的差異沒有統計學意義,這可能是因為受試者樣本量還不夠,且 PD 組部分受試者為發病較輕或者服藥后的患者。后續工作應增加試驗的樣本量,將不同患病程度的 PD 患者作為受試者來進行研究,同時研究服藥前后各患者運動功能的變化情況。
)
Table3.
Statistical results of each quantitative parameter (
)
由于篇幅所限,本文并未列出各個 PD 患者的運動功能定量指標。對比患者相應的臨床量表評分,可以發現較高的 UPDRS Ⅲ 得分對應于較差的運動功能,這具體表現為定量指標的變化,如:步幅較小、轉身時間較長、翻腕及抬腿的頻率較低、站立時腰部的 MV 較大等 。而且 H-Y 分期與 PD 的發展程度有關,隨著分期的增加疾病從單側發展到雙側,并出現平衡障礙。但這一變化并不是簡單地表現為運動功能的定量變化,需要對比單側和雙側肢體的運動功能并結合腰部平衡功能的定量指標來進行評估。
2.2 BP神經網絡分類及預測結果
經過 10 次 5 折交叉驗證,BP 神經網絡對兩個組的分類準確率為 90.00% ± 3.85%,敏感性為 85.33% ± 8.20%,特異性為 94.67% ± 2.81%。對患者臨床 H-Y 分期和 UPDRS Ⅲ 的一次預測結果如圖 5 所示,其中藍色圓圈為預測值,紅色星號為真實值,樣本順序為隨機生成。可以看出預測值和真實值的大致趨勢相同,H-Y 分期的預測誤差在 1 期以內,UPDRS Ⅲ 的預測誤差在 10 分以內,大部分誤差保持在 5 分以內。10 次運算結果表明,BP 神經網絡對 H-Y 分期的預測準確率為 72.80% ± 5.60%,對 UPDRS Ⅲ 評分預測的準確率為 68.64% ± 2.84%。分類和預測結果表明,本文方法可以很好地區分出對照組和 PD 組,且有著較高的特異性,但由于樣本量不足和 PD 患病復雜性的影響,導致對個別患者的 H-Y 分期和 UPDRS Ⅲ評分預測誤差較大,整體的準確性還有待提高。后續工作需要進一步優化算法,選取特征,同時完善試驗動作范式使其能夠涵蓋 PD 患者不同層面的運動功能。
圖5
BP 神經網絡對 PD 組 H-Y 分期和 UPDRS Ⅲ 評分的預測結果
Figure5.
BP neural network prediction results for the H-Y stage and UPDRS Ⅲ score of the PD group
3 結論
為了客觀全面評估 PD 患者的運動癥狀,本文提出了一種基于多節點可穿戴設備來對 PD 患者運動功能進行定量評定的方法。在 6 個試驗范式動作下通過 5 個傳感器節點記錄到運動的加速度、角速度信號,提取出 20 個反映不同身體部位運動功能的定量指標,并使用 BP 神經網絡進行 PD 組和對照組的自動分類,給出與臨床評估量表相對應的量化評分。30 例 PD 組和對照組的臨床試驗結果表明,兩個組之間多數指標的差異具有統計學意義,10 次 5 折交叉驗證表明 BP 神經網絡對兩個組的分類準確率達到 90.00%,對患者組的 H-Y 分期和 UPDRS Ⅲ 評分預測的準確率分別為 72.80% ± 5.60% 和 68.64% ± 2.84%。以上結果表明,本文方法做到了對 PD 患者運動功能多個身體部位、多指標、自動化的定量評定,這對 PD 的定量評估研究以及臨床輔助診斷具有一定的參考價值。