為了解決現有電刺激系統刺激通道數過少和缺乏刺激效果反饋的問題,本文設計了一種帶有表面肌電反饋的功能性陣列電極電刺激系統,通過體外實驗和人體試驗,首先驗證了系統的有效性;然后證實了達到相同的刺激階段所需刺激電流的安培數在個體間存在差異,且男性所需刺激電流的安培數一般大于女性;最后本文驗證了如果達到相同的刺激階段,使用方波刺激比使用微分波刺激所需刺激電流的安培數要小。本文設計的這一系統結合陣列電極和表面肌電反饋系統,提高了電刺激的準確性,實現了對電刺激過程中反饋的表面肌電信號的全程記錄,并且電刺激參數可隨著反饋的肌電信號變化而變化。電刺激系統與表面肌電反饋系統共同作用形成了一個閉環的電刺激工作系統,可達到提高電刺激康復治療效率的目的。綜上所述,本文開發設計的具有表面肌電反饋的功能性陣列電極電刺激系統操作簡單、體積小、功耗低,為今后將電刺激康復治療設備引入家庭奠定了基礎,也可為今后開發同類型產品提供一定的借鑒和參考。
引用本文: 尹琪敏, 李曉歐, 劉巧紅. 具有表面肌電反饋的功能性陣列電極電刺激系統設計. 生物醫學工程學雜志, 2020, 37(6): 1045-1055. doi: 10.7507/1001-5515.201910007 復制
版權信息: ?四川大學華西醫院華西期刊社《生物醫學工程學雜志》版權所有,未經授權不得轉載、改編
引言
中風、腦卒中、脊髓損傷等神經系統疾病常會導致足下垂、偏癱、面癱等后遺癥。在我國,每年因神經系統疾病導致的不同程度上肢運動性功能障礙患者數量高達數百萬人[1-2]。嚴重的患者甚至失去了生活自理的能力,這不僅給他們的心理造成了極大的創傷,也給他們的家庭帶來了巨大負擔,因此目前對上肢偏癱患者進行有效康復治療的需求非常迫切[3]。已有研究表明,偏癱患者的運動功能可以利用電刺激療法得到改善。電刺激療法可以幫助患者重建或者恢復部分運動功能,是一種發展前景極好的神經損傷疾病康復技術[4-6]。
功能性電刺激(functional electrical stimulation,FES)利用一定強度的低頻電流對患者癱瘓部位的一組或多組肌肉組織施加刺激,引發肌肉運動或模擬正常的自主運動來改善或恢復被刺激部位肌肉或肌群的功能。外部電流刺激可以引發癱瘓部位肌肉收縮使相應關節運動,達到運動功能重建或恢復的目的[7-10]。FES 發揮有效治療的前提是患者的神經損傷部位具有完整神經傳導通路。張大威等[11]、王穎娜等[12]、王娟等[13]、Kutlu 等[14]和 Grill 等[15]都探索了 FES 對運動性功能障礙患者在康復訓練中的影響。通過動物實驗和人體試驗,上述研究證實了肌肉的肌力在 FES 作用下較之前有明顯的增強。但是目前,針對上肢康復系統的研究仍然較少,而且大多數動物實驗和臨床人體試驗采用的是開環或者單通道電刺激康復系統,這樣設計不僅會對使用者產生誤刺激,治療過程中還缺乏治療效果的有效實時反饋。同時,由于存在個體差異,針對不同個體治療時,如何調節電刺激器各項參數以適應不同個體也顯得尤為重要。刺激信號強度過大或頻率過高都可能會對肌肉或神經造成損傷,不利于患者康復[15],因此針對不同患者不同程度的偏癱癥狀制定合適高效的治療方案就成為了研究的重點。
基于以上已有的研究基礎和現存問題,本文設計了一種具有多通道實時表面肌電(surface electromyography,sEMG)信號反饋的陣列電極電刺激系統。該系統內部包含了一套閉環的自適應參數調節系統,可針對不同個體進行適當調節。其中,使用的陣列電極是將大塊單通道刺激電極分為一塊塊小的多通道刺激電極,提高了刺激的準確性和選擇性[16]。這是基于單通道的刺激電極往往只能選擇一塊肌肉進行刺激,而陣列電極可以同時選中多塊肌肉進行刺激。陣列電極可以實現不停止刺激器工作的情況下也能動態改變有源電極位置的目的[17]。另外,系統中還配置了實時反饋的 sEMG 信號采集電極,該電極置于皮膚表面,能夠采集皮膚表面神經肌肉活動產生的生物電信號,操作簡單且無創[18]。通過添加這一裝置,在實際操作中臨床醫師可以通過實時觀察生物電信號在治療過程中的變化,更有針對性為患者制定治療方案。最終,通過對系統進行體外測試和人體試驗,期望本文系統的設計能夠滿足便攜、安全、穩定的要求,未來或許可以將本系統應用于臨床試驗。
1 電刺激系統設計
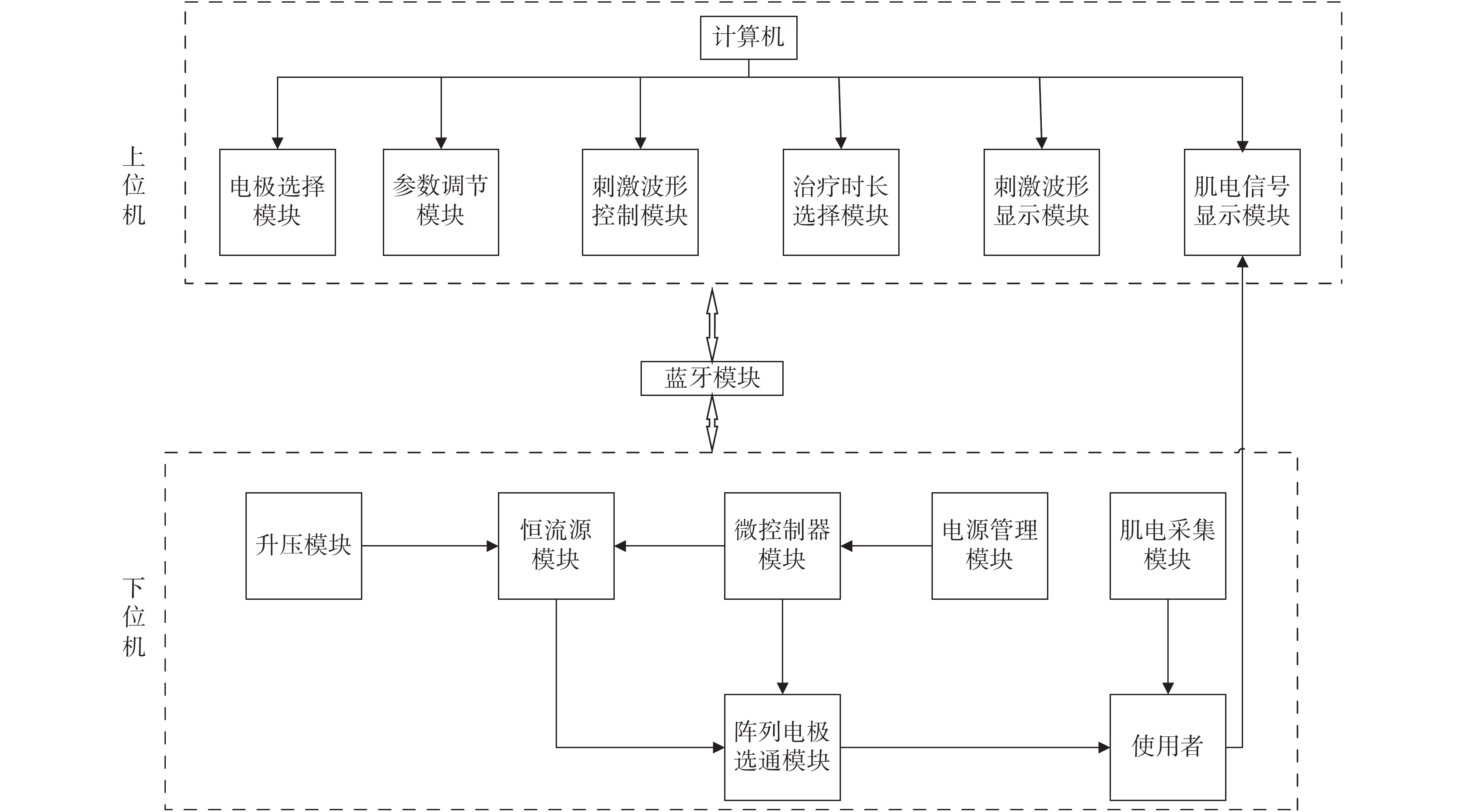
如圖 1 所示,給出了整個電刺激系統的設計流程圖。其中,硬件部分包含 7 個模塊,分別是:微控制器模塊、電源管理模塊、藍牙模塊、升壓模塊、sEMG 信號采集模塊、恒流源模塊以及陣列電極選通模塊。圖 1 中下位機中的箭頭方向表示的是模塊間的控制關系,電源管理模塊為微控制器模塊供電;微控制器模塊控制陣列電極選通模塊的工作;恒流源模塊產生恒定的刺激電流;升壓模塊為恒流源模塊提供足夠的電壓;上位機控制界面是在裝有操作系統 windows7.0(Microsoft Inc.,美國)的計算機上進行設計,使用的編程環境是基于 Windows 平臺應用程序的集成開發環境 Visual Studio 2013(Microsoft Inc.,美國),編寫語言選用 C#語言。控制界面的功能是控制下位機刺激器工作、調節刺激信號參數和實時顯示反饋的 sEMG 信號。系統的工作過程是上位機向下位機發送刺激命令,刺激器收到指令后,通過單片機配置產生相應的刺激信號并借助表面陣列電極作用于人體,同時 sEMG 信號采集電極采集電刺激過程中產生的 sEMG 信號,通過 sEMG 信號接收裝置傳回到上位機控制界面顯示,本系統的使用者可根據控制界面顯示的 sEMG 信號變化而相應調整電刺激參數,從而形成一個閉環的電刺激康復系統。上位機和下位機的數據傳輸通過藍牙轉串口的方式實現,擺脫了有線束縛,使用更加便捷。
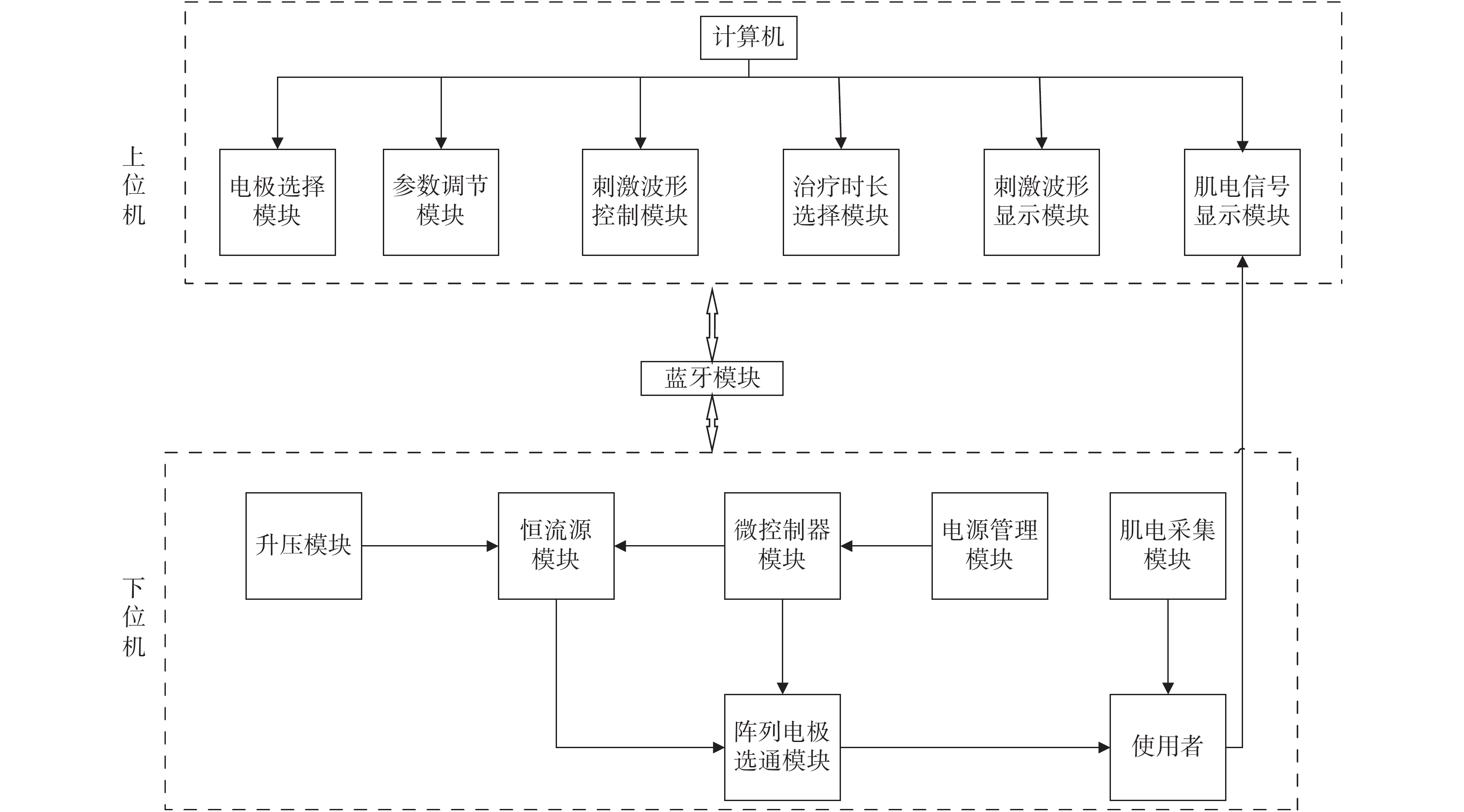 圖1
電刺激系統流程圖
Figure1.
Flow chart of electrical stimulation system
圖1
電刺激系統流程圖
Figure1.
Flow chart of electrical stimulation system
2 下位機硬件設計
硬件部分主要用途是產生作用于人體的刺激信號。如前文所述,本系統硬件部分主要分為 7 個模塊,分別是:微控制器模塊、電源管理模塊、藍牙模塊、升壓模塊、sEMG 信號采集模塊、恒流源模塊以及陣列電極選通模塊。整個系統由微控制器模塊控制;電源管理模塊為整個系統供電;藍牙模塊是連接上位機和下位機通信的樞紐;升壓模塊和恒流源模塊相結合保證恒定的電流刺激;sEMG 信號采集模塊是采集刺激位點產生的 sEMG 信號并傳回到上位機顯示,用于評判刺激效果;陣列電極選通模塊是用來選通工作電極,將刺激信號通過貼附在皮膚表面的電極作用于人體。
2.1 微控制器模塊
微控制器作為下位機的主控芯片至關重要。芯片選用的是 STM32F103VET6(ST Inc.,瑞士),該款單片機具有高性價比和大容量的隨機存取存儲器(random access memory,RAM)和閃存存儲器,32 位的內核為實時控制系統提供優良的低功耗性能,低成本、快速的中斷反應、高效的數據處理能力以及豐富的輸入輸出端口都滿足設計的需求[19]。單片機內含的直接內存存取(direct memory access,DMA)可以滿足不同速度硬件設備之間數據的高效傳輸,可以大大提高系統的工作效率。
2.2 電源管理模塊
整個系統由可充電的鋰電池供電,符合便攜式設備的設計理念。電源管理模塊的主要作用是給鋰電池充電。電源管理模塊中電源管理芯片選取的是 FM6316(H&M Semiconductor Inc.,中國),它不僅集成了鋰電池充電管理,還可以將輸入的電池電壓升壓并穩定為 5 V 輸出。在給鋰電池充電時,FM6316 提供了兩個充電指示燈,方便且直觀。可充電鋰電池利用計算機通用串行總線(universal serial bus,USB)接口進行充電。鋰電池的工作電壓為 3.7 V,容量是 2.5 Ah。FM6316 具有過流和欠壓等多重保護電路,可以保證刺激器的安全使用。5 V 穩壓輸出端連接了一個簡單的降壓電路將 5 V 電壓降壓為 3.3 V 為其他模塊供電。系統在充電狀態下不會對外放電,當系統檢測到有外部設備接入時,FM6316 就會通過電池向外部設備供電,無設備接入時,其待機電流為 16 μA,滿足低功耗設計。
2.3 藍牙模塊
無線通信的適用性廣,發展成熟;對比需有線連接的通信設備,無線通信可以增加使用時的移動性和舒適性。本系統中上位機控制界面和下位機刺激器之間的通信方式采用藍牙模式,通過藍牙轉串口的方式進行數據傳輸。上位機控制界面所依附的計算機中沒有藍牙功能,因此本系統中使用了帶有 USB 接口的藍牙適配器。藍牙模塊選用的是 HC-05(深圳市引芯科技發展有限公司 Inc.,中國),工作模式選取的是自動連接模式。一旦藍牙成功連接,就可以當作全雙工串口使用,使用起來非常方便;使用者可以在以計算機為圓心,半徑為 10 m 的范圍以內隨意移動。
2.4 升壓模塊
本系統采用恒流刺激方式,因為恒流刺激可以控制或限制脈沖信號以確保使用者的安全[20]。人體阻抗范圍為 1~3 kΩ,為了保證不同負載得到相同的電流,就要為系統提供足夠大的電壓,升壓模塊可以實現這一功能。升壓控制器選用的是 MCP1650(深圳市誠芯宇科技發展有限公司 Inc.,中國),這款芯片具有低功耗的關斷模式,可以最大限度減小外部電感、電容的尺寸,有利于縮小裝置的體積,符合便攜式設備的設計要求。
在升壓電路中,場效應管和肖特基二極管共同作用,可以允許電壓在較大的范圍內進行轉換,保證了高電壓增益。通過外接電流檢測電阻,可以檢測系統中輸入的峰值電流,一旦發現輸入的峰值電流超過閾值電流,刺激脈沖信號就會被異步終止,防止場效應管被損壞,確保刺激系統使用的安全性。電路中還設計了一個反饋電路,將升壓后的輸出電壓通過兩個分壓電阻接到 MCP1650 的反饋端用以調整輸出電壓的大小。系統的最大輸出電流是 10 mA,使用的兩個分壓電阻的阻值分別為 51 kΩ 和 1 kΩ,5 V 的輸入電壓經過升壓電路處理后,理想的最大輸出電壓在 64 V 左右,實測的電壓在 58 V 左右,也能夠滿足 10 mA 的恒流輸出。
2.5 sEMG 信號采集模塊
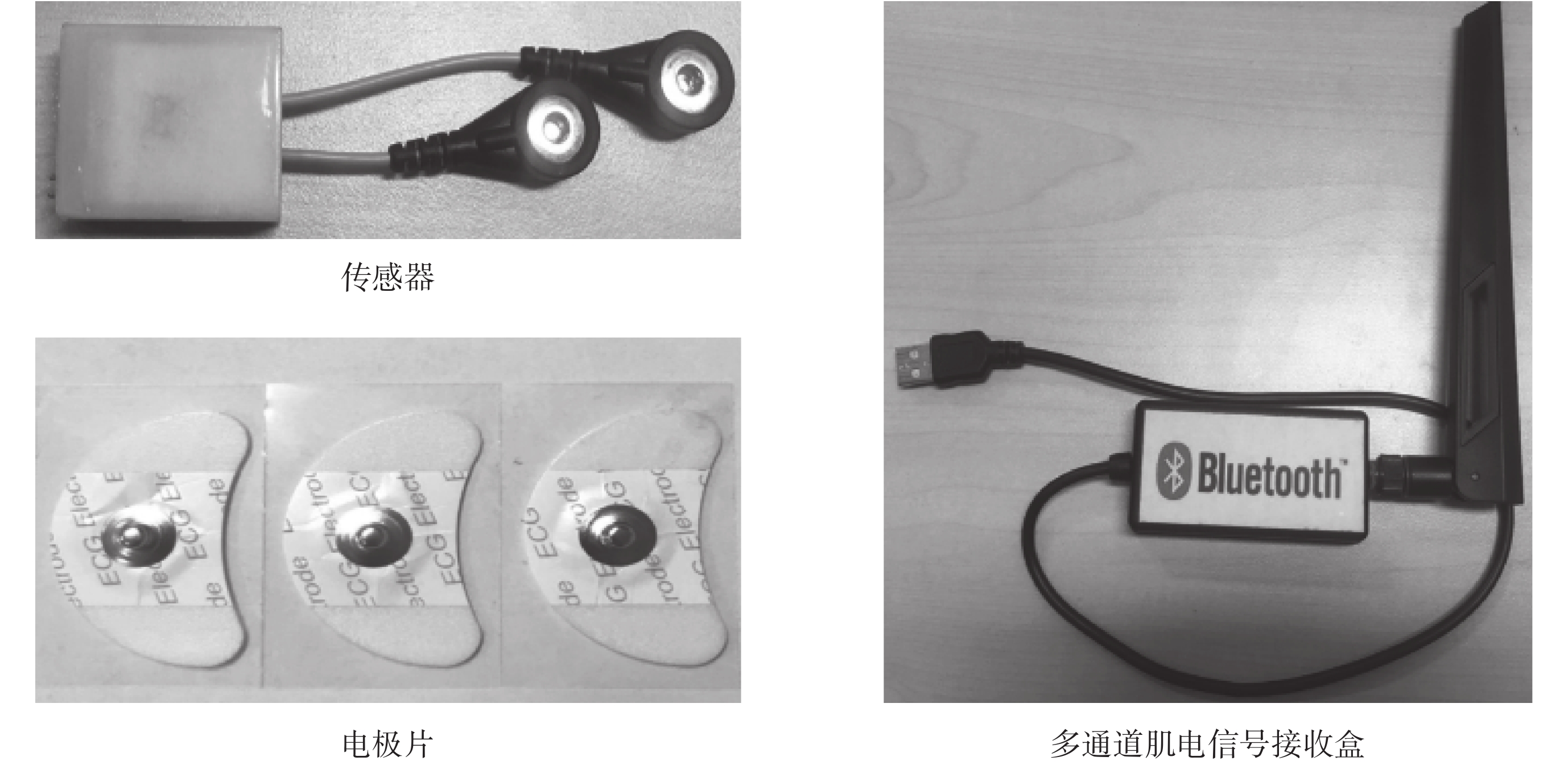
sEMG 信號采集模塊的作用是采集電刺激過程中產生的 sEMG 信號。使用的采集設備是便攜式 sEMG 信號采集模塊 EmgServer(北京昌豐科技有限公司 Inc.,中國)。如圖 2 所示,sEMG 信號采集設備由 sEMG 信號采集傳感器、sEMG 信號采集電極以及多通道的 sEMG 信號接收盒組成。sEMG 信號采集電極使用的是心電電極,sEMG 信號采集電極與傳感器共同作用采集電刺激過程中產生的 sEMG 信號,傳感器將采集到的 sEMG 信號通過藍牙傳送到 sEMG 信號接收盒,sEMG 信號接收盒通過 USB 接口將接收到的 sEMG 信號傳入計算機進行顯示。
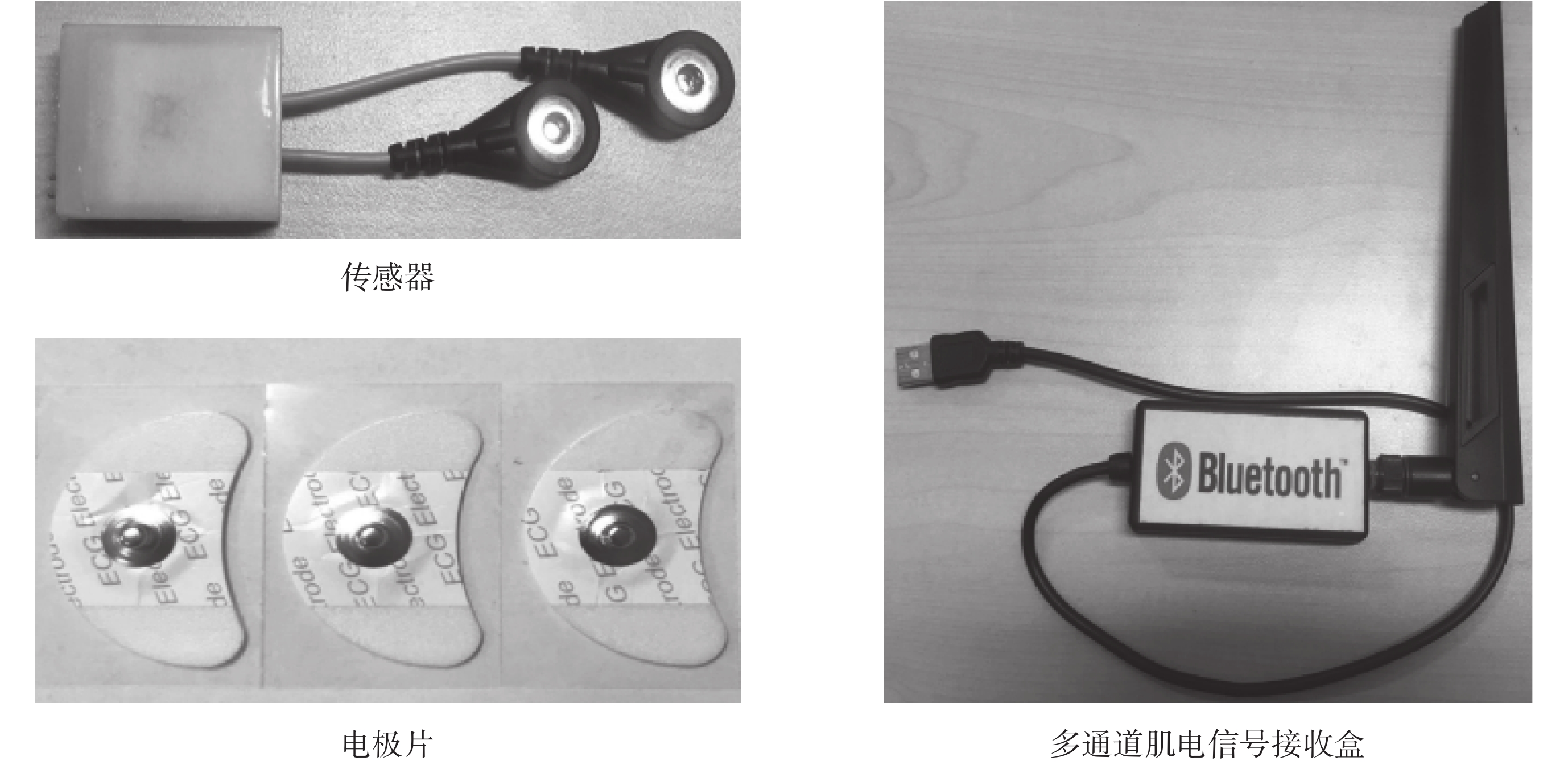 圖2
sEMG 信號采集設備
Figure2.
sEMG signal acquisition equipment
圖2
sEMG 信號采集設備
Figure2.
sEMG signal acquisition equipment
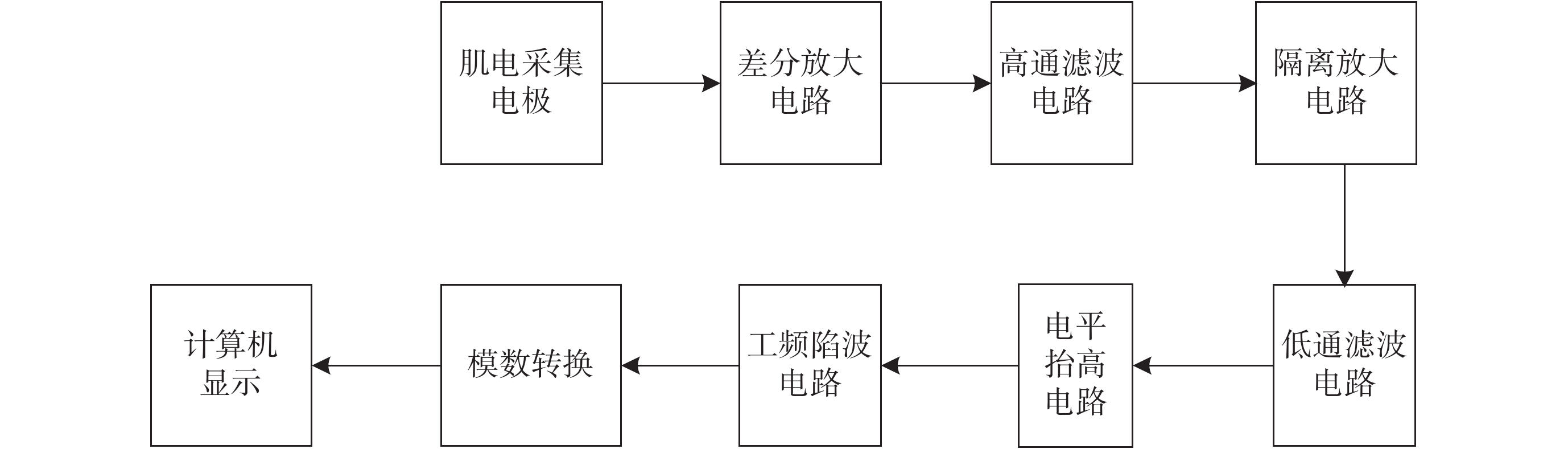
如圖 3 所示是 sEMG 信號采集流程圖。sEMG 信號采集電極貼附在皮膚表面獲取 sEMG 信號,但是人體產生的 sEMG 信號極其微弱,因此,將采集到的 sEMG 信號通過差分放大電路進行一級放大,提高前端輸入阻抗,降低共模影響。sEMG 信號頻率范圍是 10~500 Hz,為了獲取這一段頻率的信號,將一級放大后的 sEMG 信號送入高通和低通濾波電路,在兩個濾波電路之間加了一個隔離放大電路,一方面將 sEMG 信號進行二級放大,另一方面隔離電路可以對設備起到保護作用。通過濾波電路獲得有效 sEMG 信號之后,再將其送入電平抬高電路進行三級放大,最后采用 50 Hz 工頻陷波器消除工頻干擾。原始的 sEMG 信號通過濾波放大電路進行處理之后再經過模數轉換器將模擬信號轉換成數字信號在計算機上進行顯示。
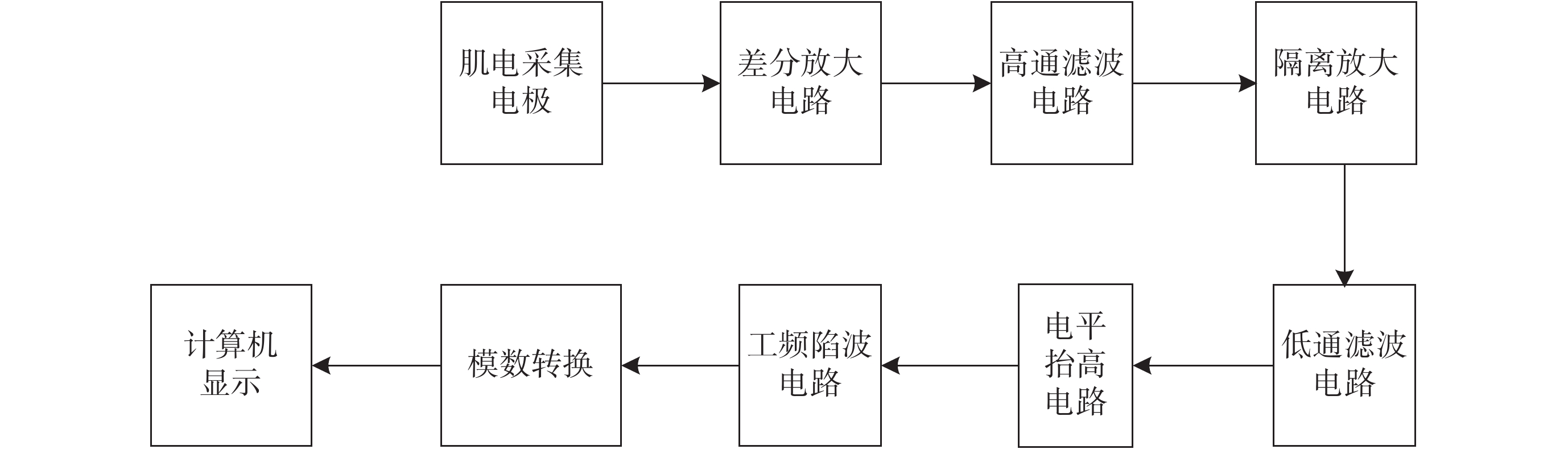 圖3
sEMG 信號采集流程圖
Figure3.
sEMG signal acquisition flow chart
圖3
sEMG 信號采集流程圖
Figure3.
sEMG signal acquisition flow chart
2.6 恒流源模塊
恒流源模塊是刺激器設計的核心部分。恒流源模塊由刺激波形調理電路、雙極性電刺激切換電路和壓控隔離的恒流源電路構成。刺激波形調理電路的作用是調整數模轉換器(digital to analog converter,DAC)輸出的刺激脈沖電壓。設計刺激波形調理電路是為了便于系統調試,因為有了調理電路,即使參考電壓準確度不高,對輸出的刺激信號影響也不大。
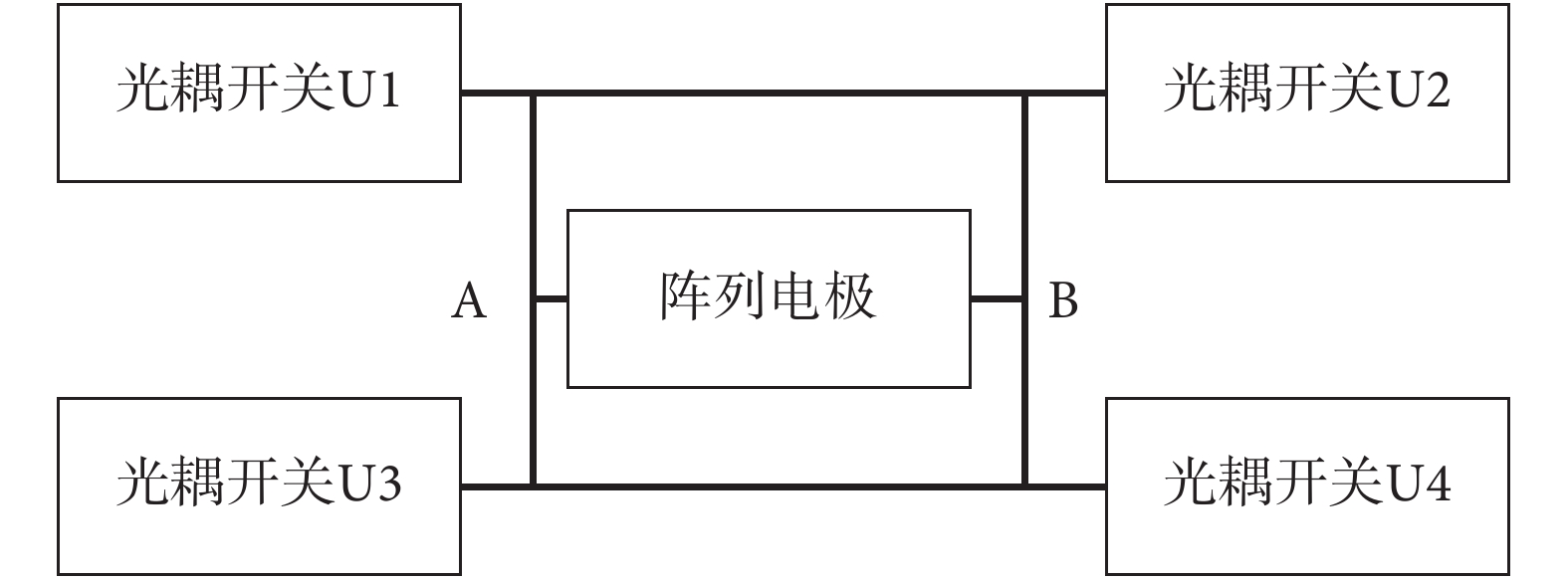
雙極性電刺激切換電路的主要作用是保證刺激電流能在電極間雙向流通,該電路的設計可以有效減少肌肉組織損傷,保證電刺激安全性。如圖 4 所示是雙極性電刺激切換電路模型圖。雙極性電刺激切換電路是由 4 個光耦開關組成的 H 橋換向電路。4 個光耦開關都是低電平導通,它們的狀態通過控制微控制器的兩個引腳的輸出電平就可以進行改變。當光耦開關 U1 和光耦開關 U4 導通時,電流從 A 經過貼附于人體的陣列電極流向 B;當光耦開關 U2 和光耦開關 U3 導通時,電流從 B 經過貼附于人體的陣列電極流向 A。
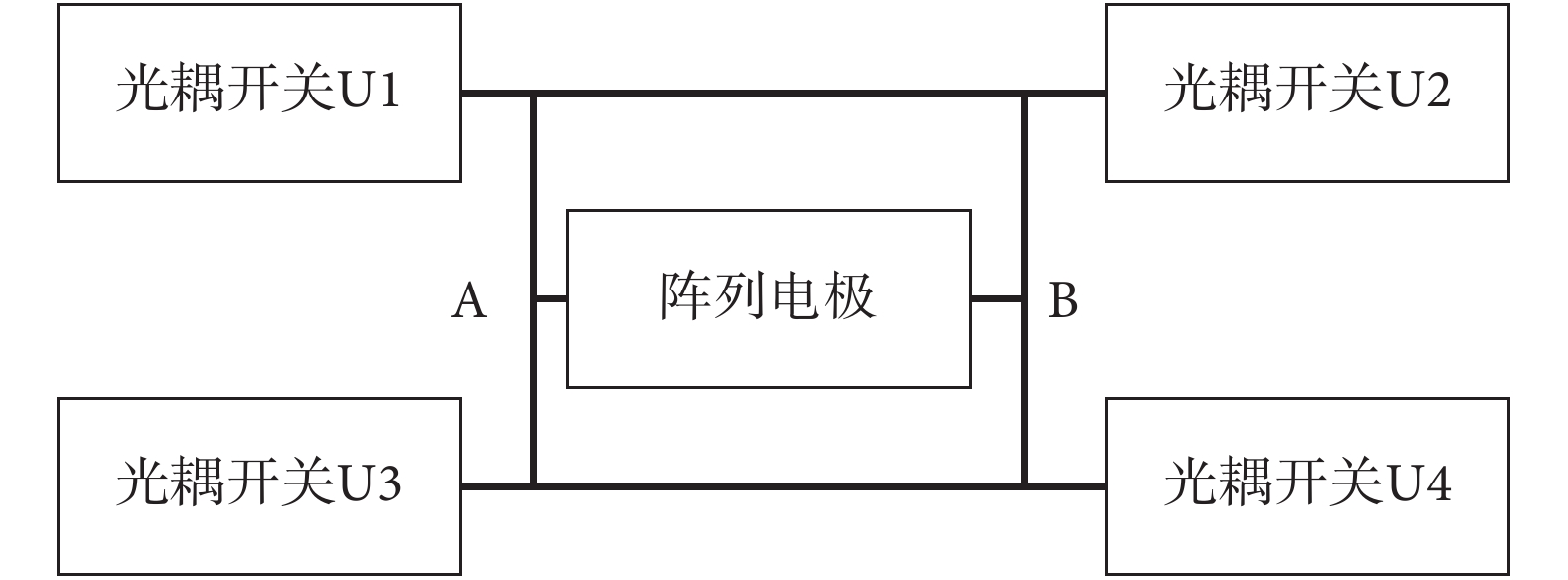 圖4
雙極性電刺激切換電路模型圖
Figure4.
Model diagram of bipolar electrical stimulation switching circuit
圖4
雙極性電刺激切換電路模型圖
Figure4.
Model diagram of bipolar electrical stimulation switching circuit
壓控隔離恒流電路中,選用了一個高線性的模擬光電耦合器[21]。光電耦合器由一個發光二極管和兩個光敏二極管組成。發光二極管將運算放大器輸出的電流轉換為同等能量的光能傳遞給兩個光敏二極管,光敏二極管再將光能轉換為電信號經過放大后輸出,這樣的一個過程就完成了電—光—電的轉換,對輸入的電信號和輸出電信號進行隔離。兩個光敏二極管性能完全相同,它們接收同等強度的光并將光轉換為同等大小的電流,一個光敏二極管輸出端的光電流反饋至運放的反相端,利用閉環的反饋電路對另一個光敏二極管輸出端的刺激電流進行調節。光電耦合器的隔離特性保證了電刺激系統良好的電絕緣能力和抗干擾能力。
2.7 陣列電極選通模塊
本系統設計的是 16 通道的陣列電極,為了保證刺激電流在電極間雙向流通,用兩個光耦開關控制一個電極觸點。光耦開關的一端與電極觸點相連,另一端分別與圖 4 中的 A 和 B 相連。16 個電極觸點需要 32 個開關控制,那么 32 個開關的狀態也需要 32 路信號控制,所以選用 4 個 8 位串行輸入、并行輸出的移位緩存器 74HC595(H&M Semiconductor Inc.,中國)級聯輸出 32 路信號控制 32 個開關的狀態。74HC595 控制開關通斷的時間極短,可以保證刺激信號及時加載到電極作用于人體。
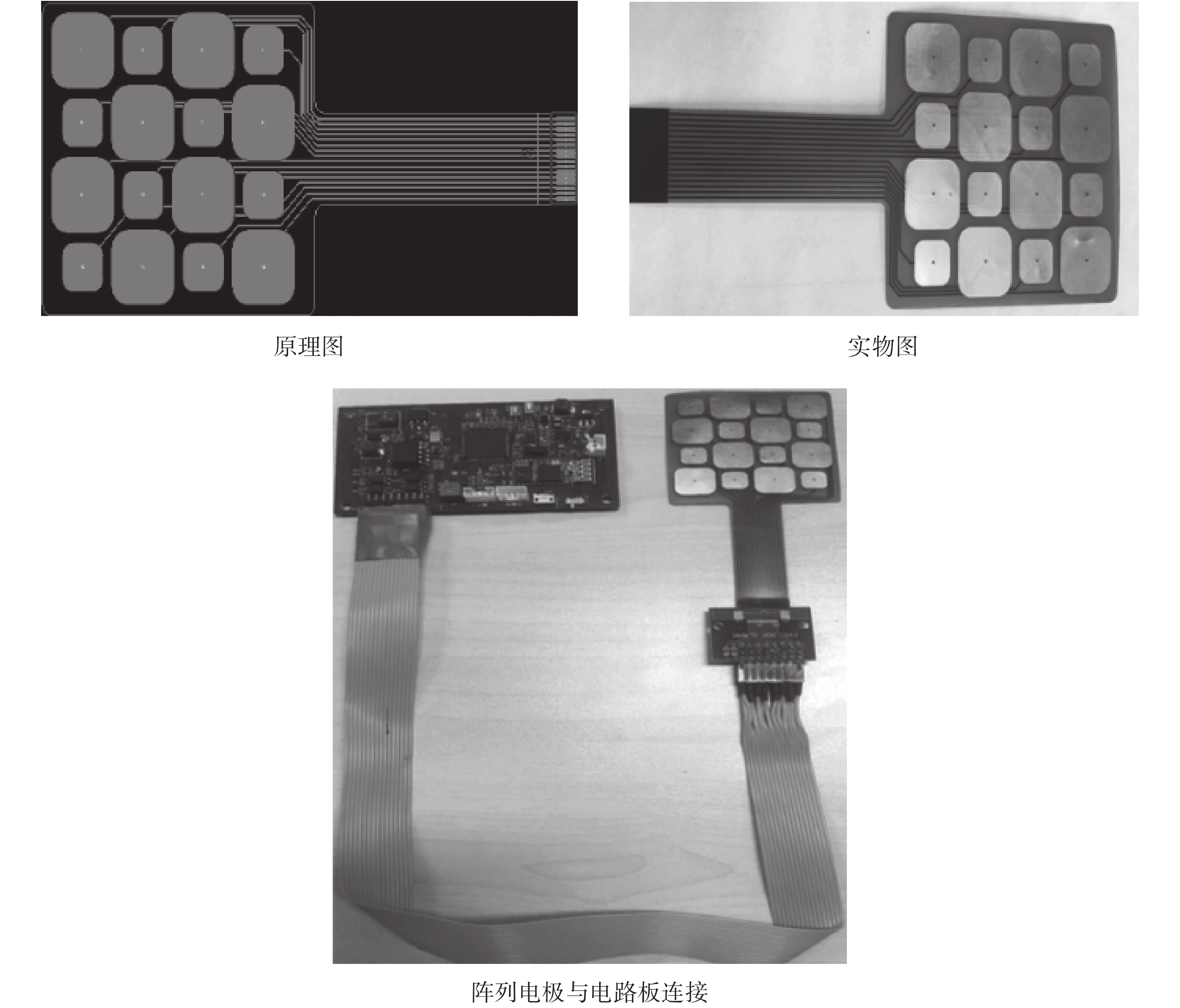
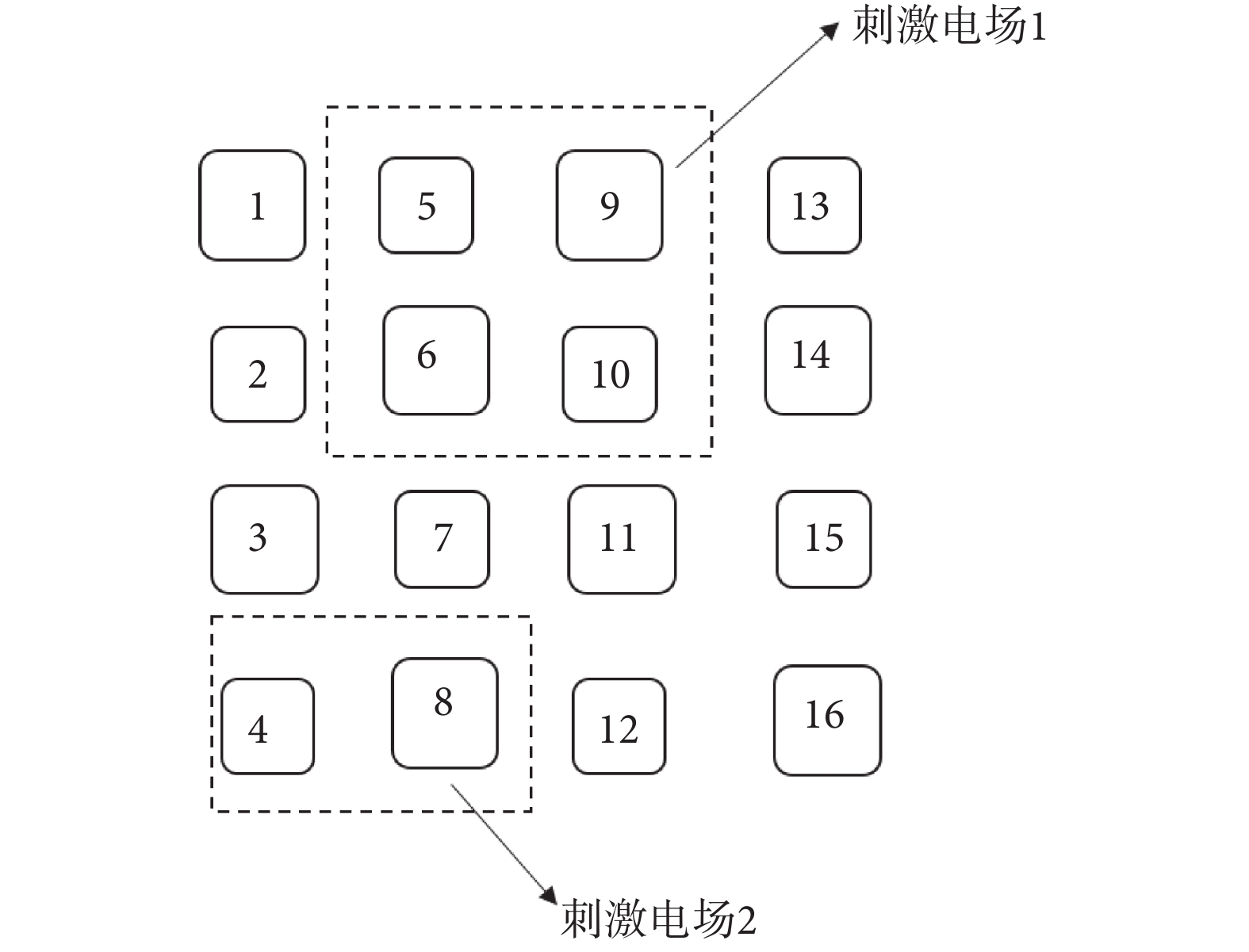
如圖 5 所示是陣列電極的示意圖,圖 5 中是 4×4 的 16 通道陣列電極。陣列電極由柔性絕緣層和金屬導電層組成。陣列電極的絕緣層是由聚二甲基硅氧烷(polydimethylsiloxane,PDMS)制作而成,PDMS 擁有良好的通透性,其較低的楊氏模量能更好貼合皮膚。陣列電極的導電層是由金屬銅制作而成,銅的導電性能好且耐腐蝕。16 個金屬觸點采用大小交叉的方式排列,大觸點的邊長為 14 mm 的正方形,小觸點的邊長是 9 mm 的正方形。陣列電極的加工工藝采用微機電技術,利用多次金屬沉積、光刻等成熟的加工工藝,不僅制作周期短,還可以有效改善刺激電流在陣列電極上的傳輸效率。陣列電極通過一個轉接芯片和 16 根灰排線與刺激器電路板相連。在刺激器工作時,只需用膠布圍住陣列電極的四周將其貼在上肢皮膚表面,刺激電流就可以通過陣列電極作用于人體。在刺激電極的選擇上,可以任意選擇陣列電極中一對或多對工作電極。如圖 6 所示,可以同時選擇 5、9、6、10 四個電極觸點為工作電極,它們可以形成圖 6 中虛線框 1 的刺激電場 1,也可以選擇 4 和 8 兩個電極觸點為工作電極,它們可以形成虛線框 2 的刺激電場 2,選中的工作電極互為參考電極。
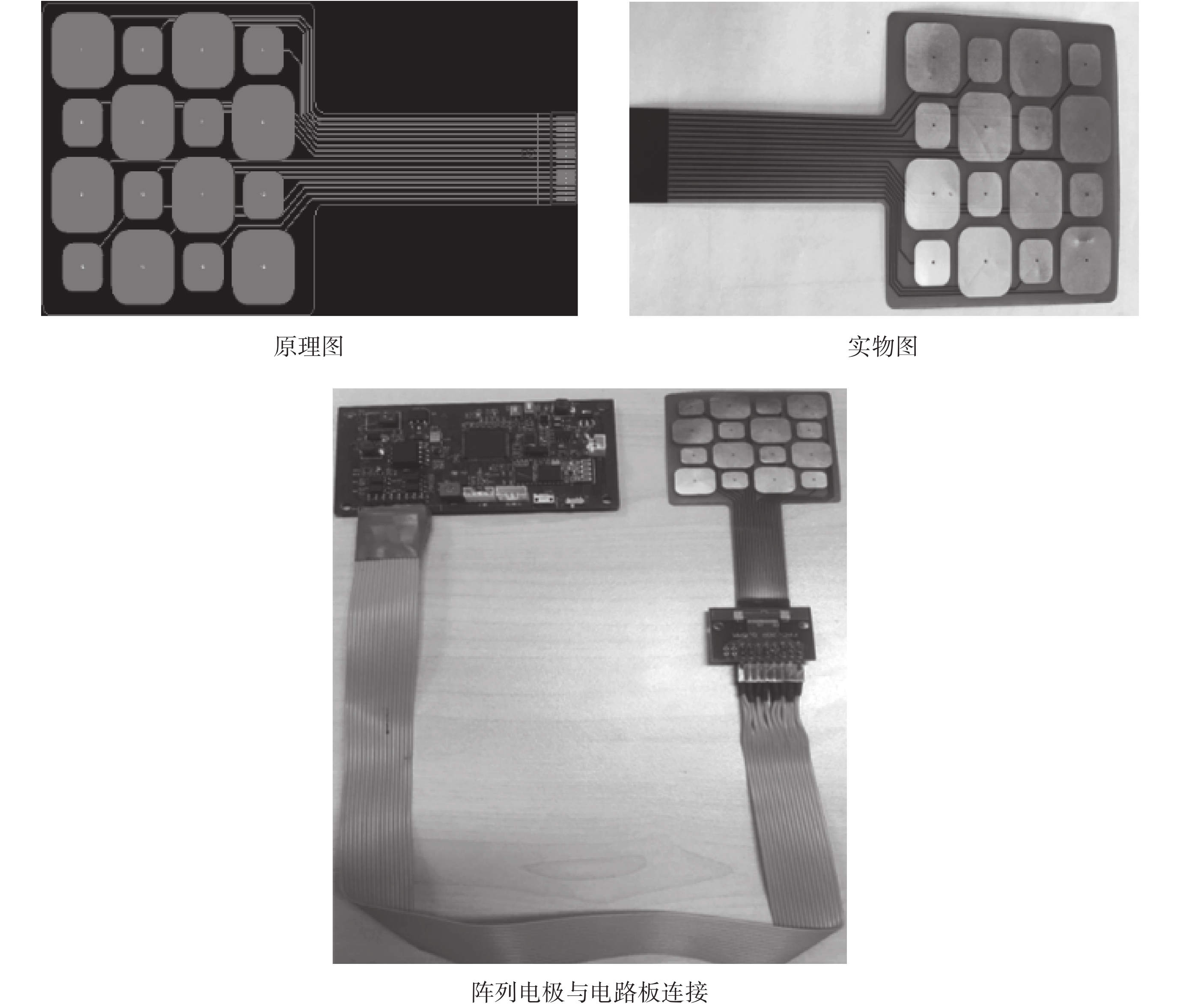 圖5
陣列電極圖
Figure5.
Array electrode diagram
圖5
陣列電極圖
Figure5.
Array electrode diagram
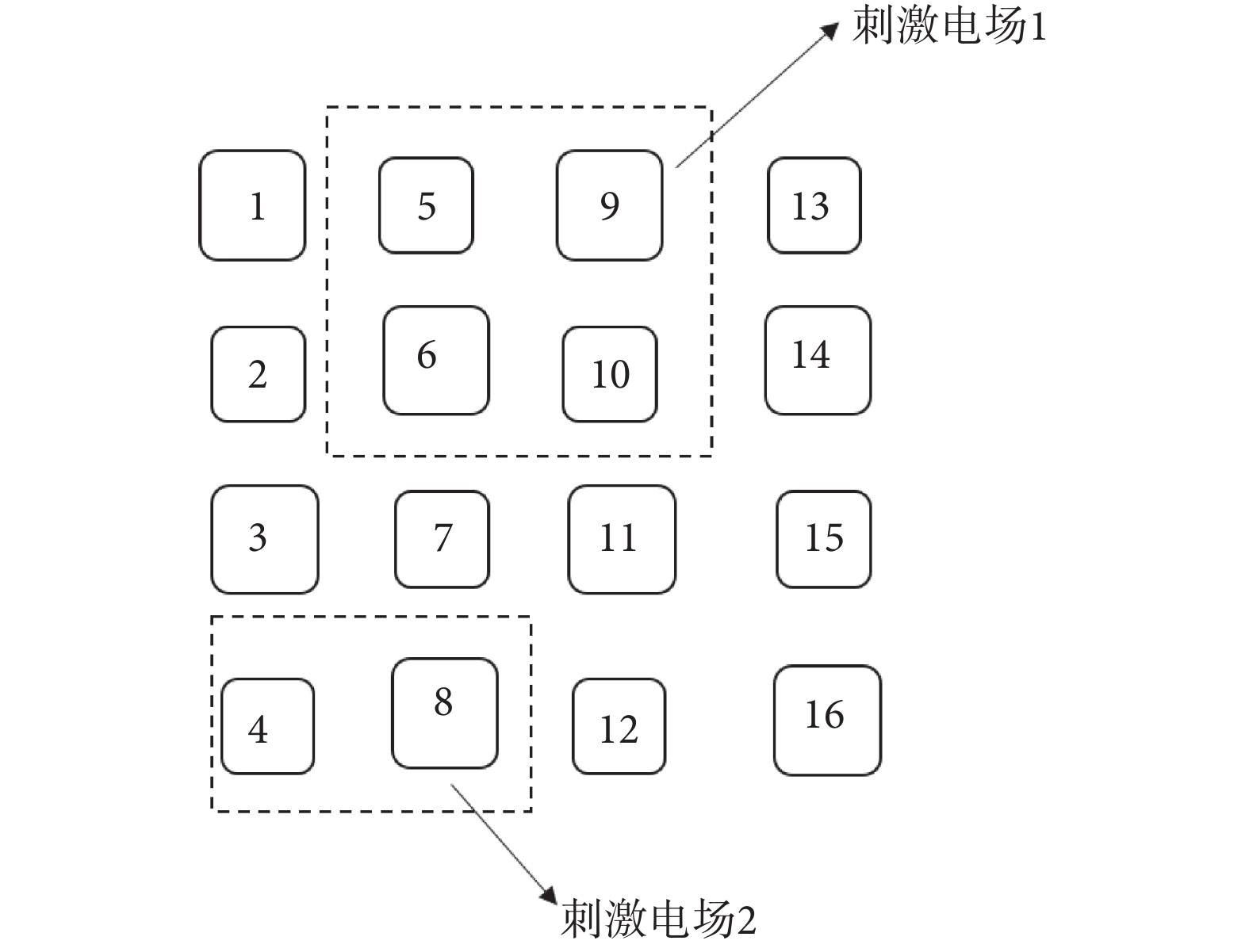 圖6
陣列電極選通示意圖
Figure6.
Schematic diagram of array electrode gating
圖6
陣列電極選通示意圖
Figure6.
Schematic diagram of array electrode gating
3 軟件設計
3.1 下位機刺激程序設計
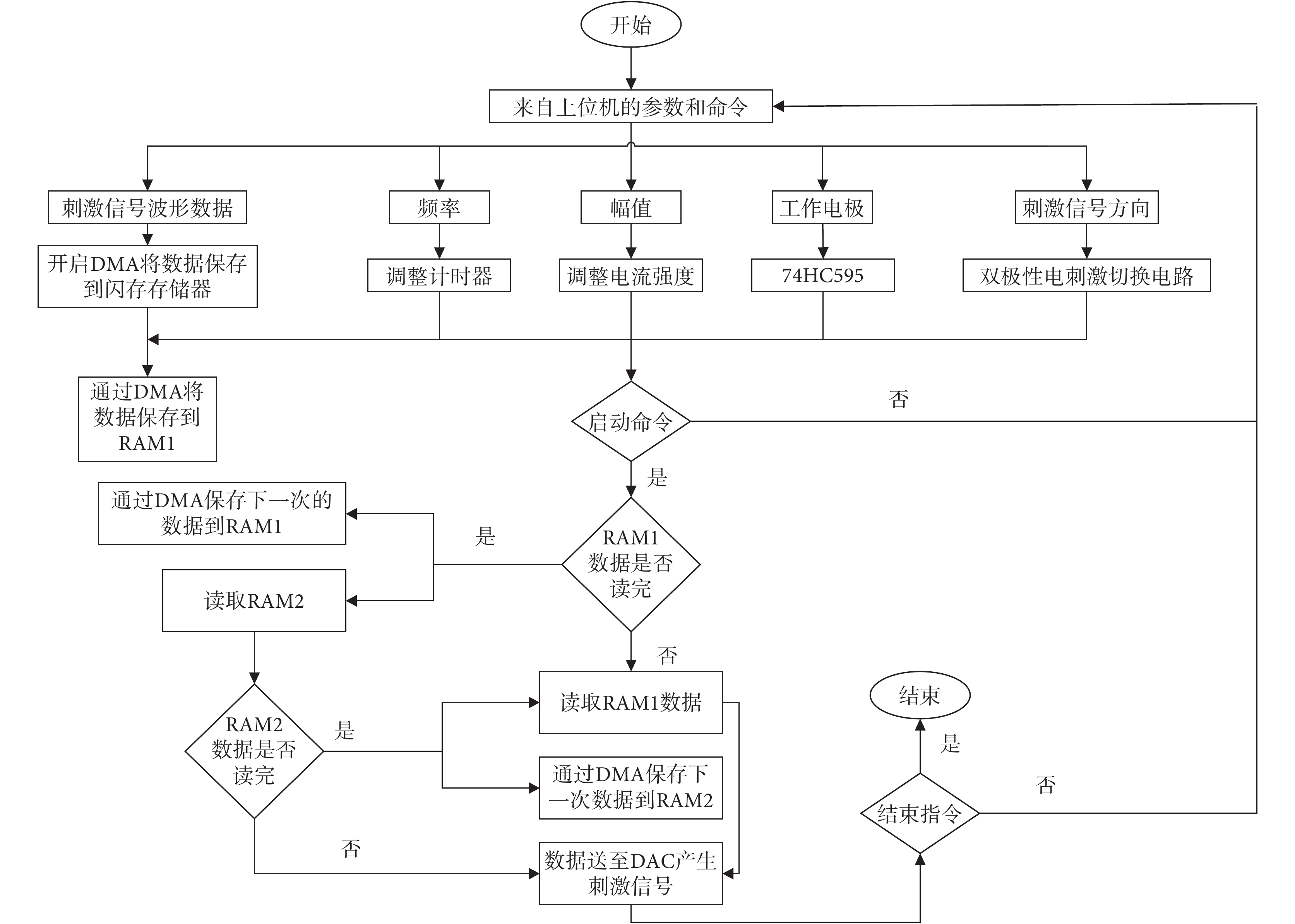
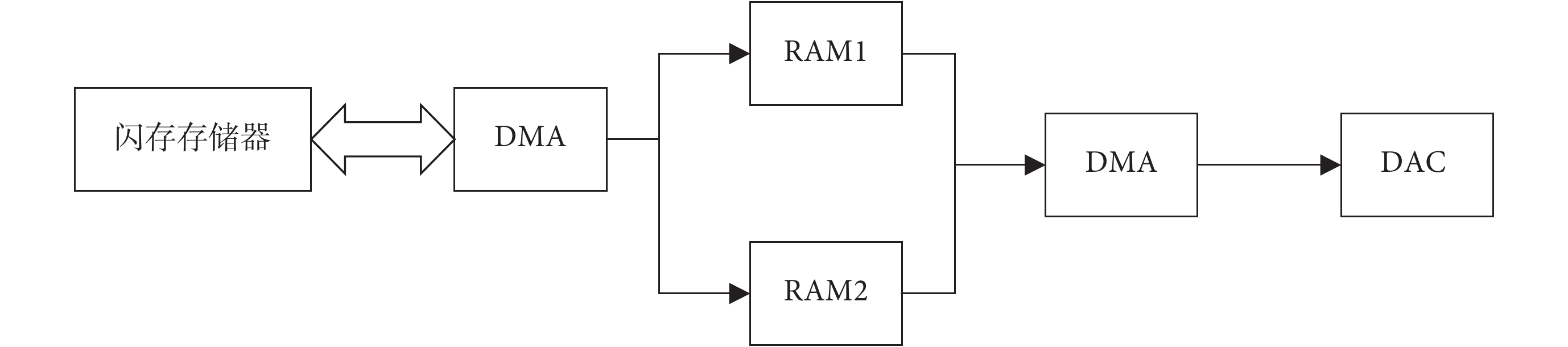
刺激程序與刺激電路板結合輸出刺激電流。如圖 7 所示是刺激程序的設計流程圖。在上位機控制界面點擊開始按鈕后,刺激信號相關參數的設置指令以及控制命令就會通過藍牙發送到刺激器電路板上的微控制器中。參數指令包括刺激信號波形數據以及設置刺激信號的頻率、幅值、工作電極和刺激信號方向。微控制器收到命令后就會通過調整計時器設置頻率;調整刺激電流強度設置幅值;控制 74HC595 選通實際工作的電極;控制雙極性電刺激切換電路設置刺激信號的導通方向。所有參數設置完成后,微控制器就會開啟 DMA 將參數數據保存至閃存存儲器中。程序設計中開辟了兩塊存儲空間 RAM1 和 RAM2。首先 DMA 將參數數據保存到 RAM1 中,當刺激器收到啟動命令后,DMA 就會將 RAM1 中的數據傳送到 DAC 中產生相應的刺激電流,同時,DMA 將下一次的參數數據保存到 RAM2 中,當 RAM1 中的數據傳送完成后繼續傳送 RAM2 中的數據到 DAC 產生刺激電流。如圖 8 所示是刺激信號數據傳輸流程圖,其中 DMA、RAM1、RAM2 以及 DAC 共同作用產生刺激電流的過程不需要中央處理器(central processing unit,CPU)的干預,可以釋放 CPU 提高程序的運行效率。RAM1 和 RAM2 雙緩存交替傳輸數據,不僅提高了系統的工作效率,還提高了系統的穩定性。
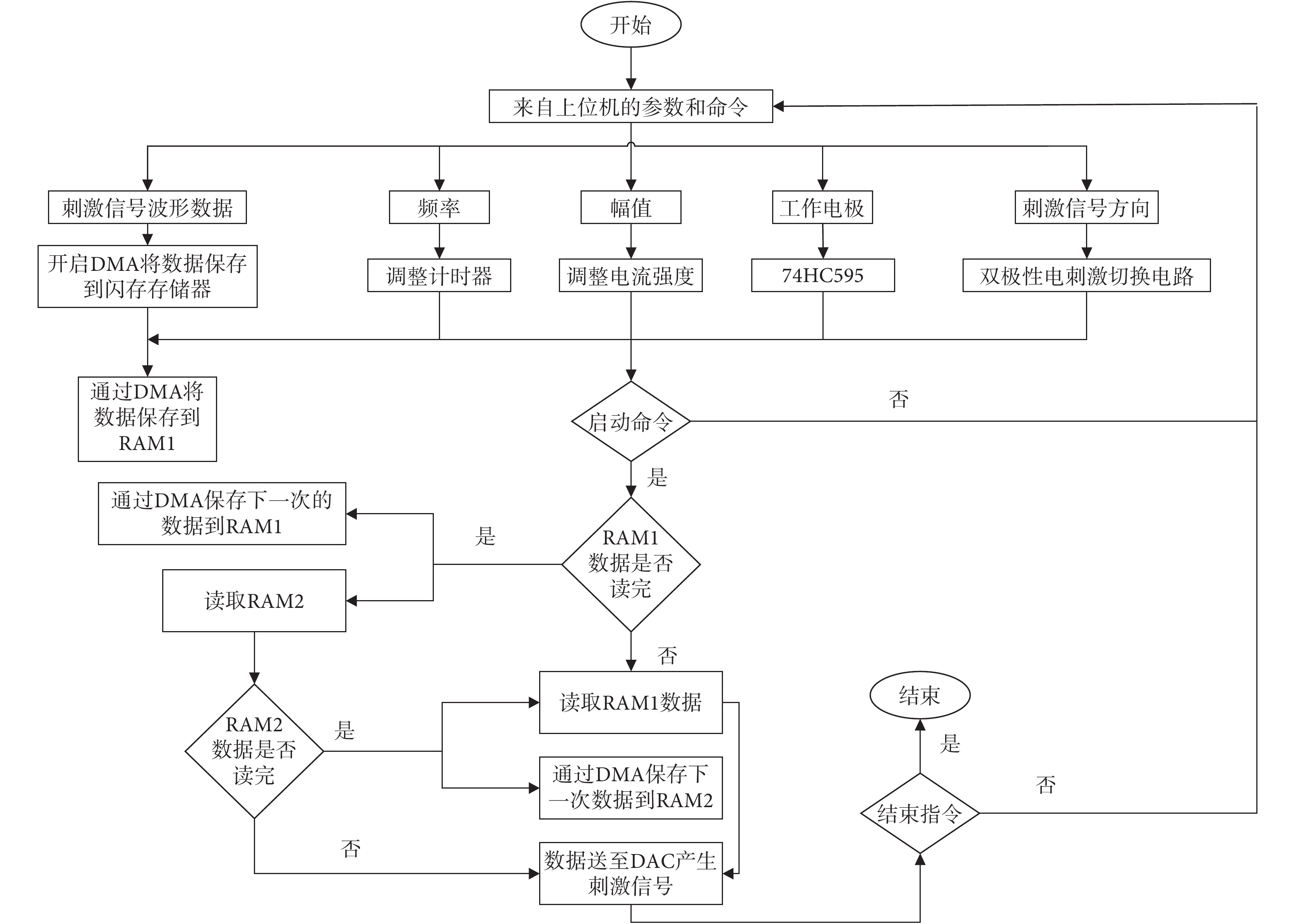 圖7
刺激器程序設計流程圖
Figure7.
Stimulator programming flow chart
圖7
刺激器程序設計流程圖
Figure7.
Stimulator programming flow chart
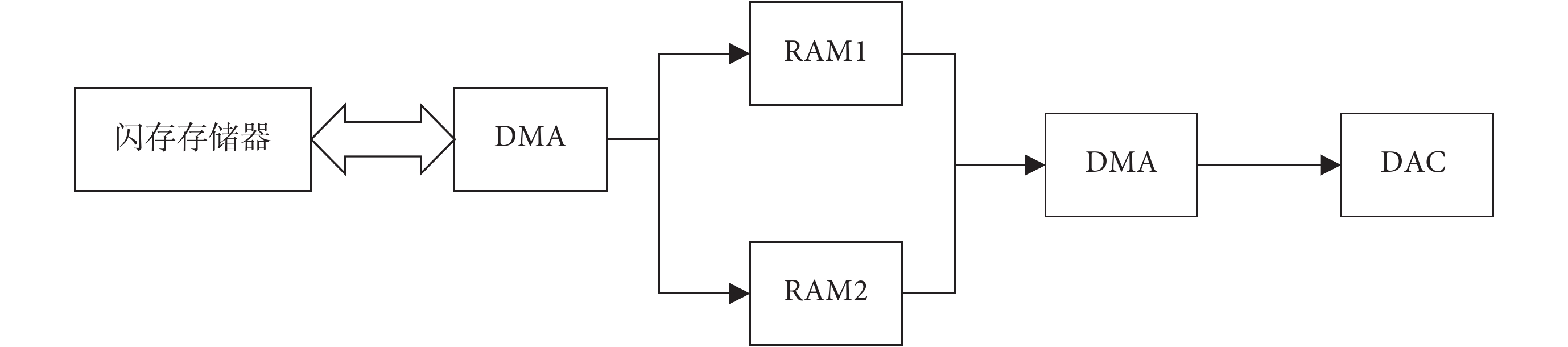 圖8
刺激信號數據傳輸流程圖
Figure8.
Flow chart of stimulus signal data transmission
圖8
刺激信號數據傳輸流程圖
Figure8.
Flow chart of stimulus signal data transmission
3.2 上位機界面設計
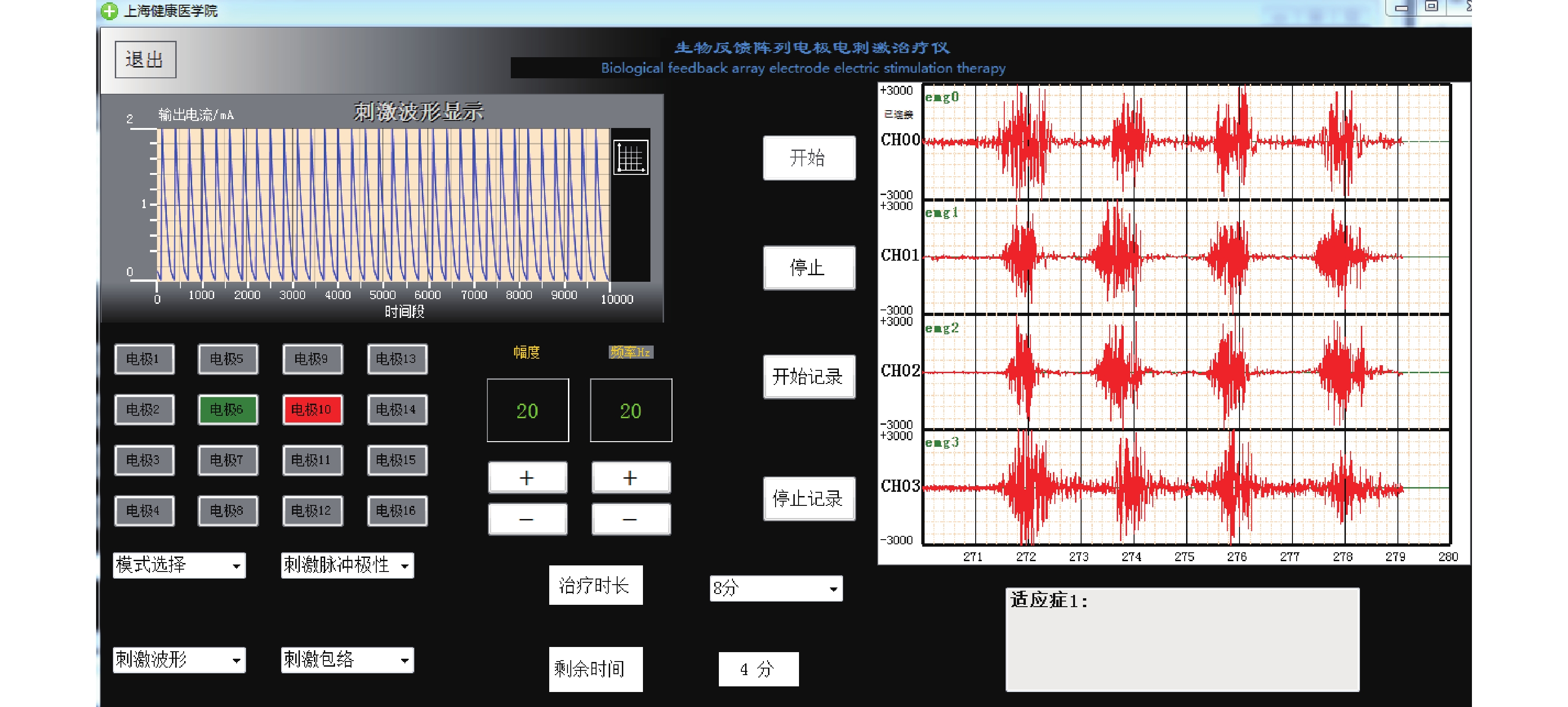
如圖 9 所示是上位機控制界面。界面由電極選通模塊、刺激波形控制模塊、刺激波形顯示模塊、參數調節模塊、治療時長選擇模塊和 sEMG 信號顯示模塊組成。電極選通模塊由 16 個按鈕組成,用來模擬 16 通道的陣列電極,用三種顏色區分電極的狀態,紅色代表電流流進的電極,綠色代表電流流出的電極,灰色代表電極沒有被選中。
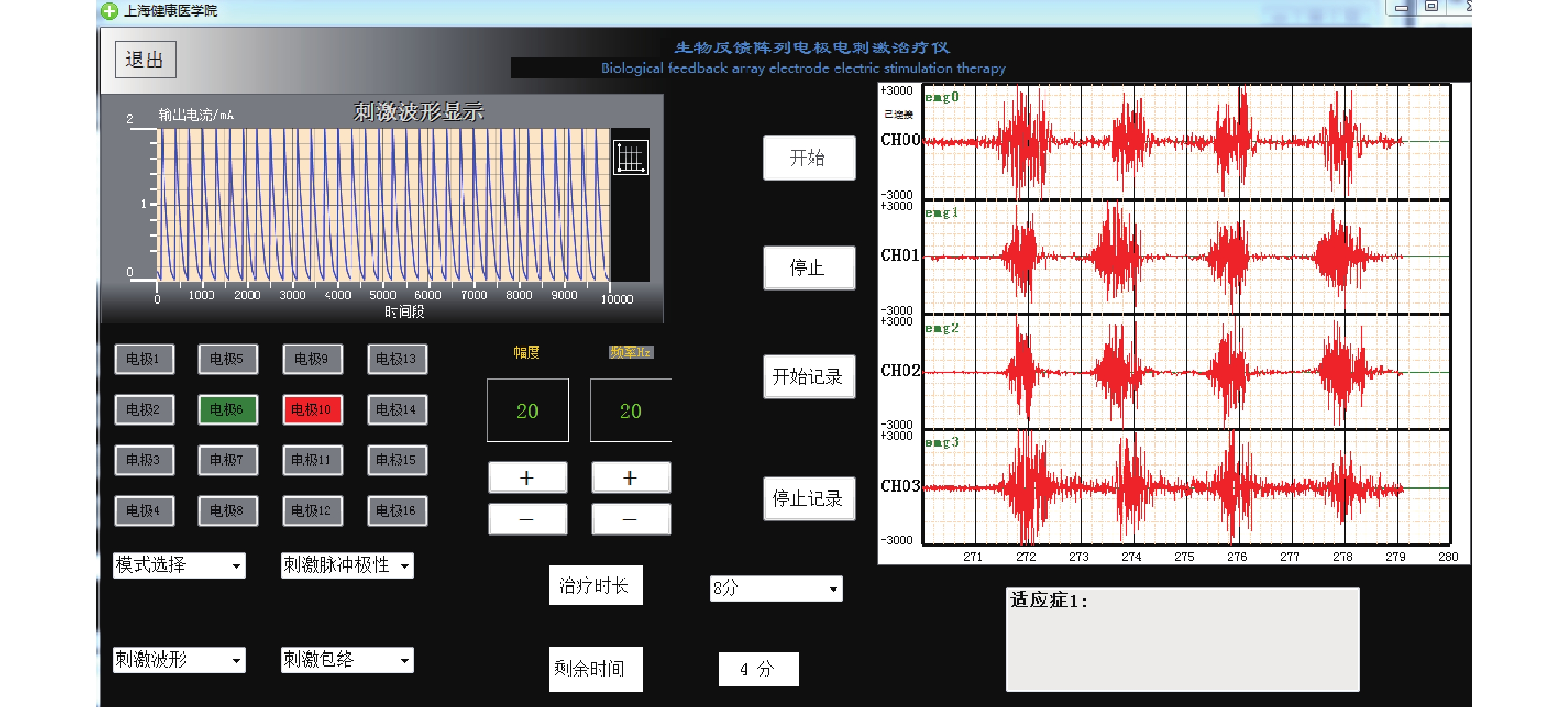 圖9
上位機控制界面
Figure9.
Host computer control interface
圖9
上位機控制界面
Figure9.
Host computer control interface
刺激波形控制模塊由模式選擇、刺激脈沖極性、刺激波形以及刺激包絡組成。模式選擇中設置了三種模式,模式一和模式二屬于自動模式,自動模式是工作電極已設定;模式三是手動模式,使用者可以根據自己的需求設置工作電極。系統中設置了微分波和方波兩種刺激波形,刺激波形與適應癥相關聯。選擇微分波時,對應的適應癥是偏癱;選擇方波時,對應的適應癥是身體疼痛。根據刺激電流通過皮膚的方向,將刺激電流極性設置為有極性和無極性兩種。有極性刺激電流指的是單相脈沖波,無極性刺激電流指的是雙相脈沖波。單相波釋放單相電流脈沖,雙相脈沖波先后釋放兩個方向相反的電流脈沖。短時間的治療可以選擇有極性刺激脈沖,刺激信號強度在短時間內可以迅速上升,一段時間后又可以迅速下降,工作效率高。長時間治療選擇無極性的刺激脈沖可以減少肌肉組織損傷。而刺激包絡分為有調制和無調制兩種選擇。刺激波形顯示區顯示的是選擇的刺激信號波形,有調制的刺激信號的波形在刺激波形顯示區是隨機變化的,無調制的刺激信號的波形在刺激波形顯示區是穩定的。
參數調節模塊包括刺激信號幅度和頻率的調節。刺激信號的頻率設置范圍是 1~1 000 Hz,輸出電流的設置范圍是 1~10 mA。在電刺激治療過程中,使用者還可以根據自己的需要設置治療的時長。sEMG 信號波形顯示模塊的功能是顯示刺激過程中產生的 sEMG 信號。sEMG 信號的通道數是可變的,最大通道數是 4 通道。所有刺激參數設置完成后,點擊開始按鈕,參數設置指令通過藍牙傳送到下位機刺激器,同時,sEMG 信號波形顯示區也開始工作,顯示采集的 sEMG 信號。程序中還設置了記錄 sEMG 信號的功能,點擊開始記錄和停止記錄兩個按鈕可以隨意保存采集到的一段 sEMG 信號用以分析。
當人體接受電刺激治療時,正常人體通常會經歷三個階段的刺激反應:感覺水平刺激、運刺水平刺激和有害刺激。在相對低強度刺激下,使用者首先經歷的是感覺水平刺激。達到感覺水平刺激時,使用者最明顯的感受是麻木感。隨著刺激強度逐漸增大,由于募集到的感覺神經纖維越來越多,患者的刺痛感逐漸增強,另外位于外周神經中支配骨骼肌的 α 運動神經元軸突很快達到其閾值。在完整神經系統中,α 運動神經元軸突被動興奮從而產生肌肉收縮,這一階段稱為運動水平刺激。達到運動水平刺激時,使用者能感受到明顯的肌肉收縮并伴隨著動作反應。刺激強度進一步加強,使用者就會感受到電刺激帶來的疼痛感,這一階段稱為有害刺激。
每個人的肌肉狀態都是不一樣的,刺激參數的設置也要因人而異,因此本系統中設計了一個閉環的刺激參數自適應調節系統,此系統可根據不同的使用者自動調整適合他們的刺激參數。自適應參數調節系統的工作過程是首先設置一個達到感覺水平刺激的刺激參數給刺激器,然后程序中設計隨著治療時間增加,刺激參數逐漸增大,此時刺激部位的肌力也隨之增加。運動水平刺激伴隨著動作反應,而感覺水平刺激只產生麻木感,因此感覺水平刺激產生的 sEMG 信號強度會明顯小于運動水平刺激產生的 sEMG 信號強度。當 sEMG 信號顯示區的 sEMG 信號強度突增時,感覺水平刺激就升級為運動水平刺激。達到運動水平刺激后,刺激參數仍然隨著時間在增加,但是,刺激參數不會隨著時間無限制增加,當運動水平刺激持續一段時間后,刺激部位肌肉耐力下降,sEMG 信號強度也會隨之減弱。當 sEMG 信號顯示區的 sEMG 信號強度驟降時,刺激參數就會自動減小,此時運動水平刺激就向感覺水平刺激轉變,以達到放松肌肉的目的。肌肉放松一段時間后,刺激參數又會隨著治療時間增加。在選擇的治療時長內,刺激參數都是按照以上規律循環變化。通過 sEMG 信號控制刺激參數的變化形成了一個閉環的自適應刺激參數調節系統,可以解決因個體差異帶來的刺激參數設置問題。
4 試驗驗證
人體試驗的目的一共有三個:一是為了驗證達到相同刺激階段,所需刺激電流的安培數在個體間是否存在差異;二是為了驗證達到相同刺激階段時,使用方波刺激和微分波刺激所需刺激電流的安培數是否存在差異;三是為了驗證刺激系統是否能實現功能性刺激,即刺激控制某一動作的相關肌肉是否能產生相應動作反應。人體試驗分兩次進行,試驗中所有志愿者都是來自上海健康醫學院的學生。數據采集地是上海健康醫學院實驗室。試驗前,已經詳細告知所有受試者試驗的目的、儀器使用的原理和試驗要求,并獲得了受試者知情同意書和數據信息使用授權書。整個試驗已經通過了上海健康醫學院醫學倫理審查并獲得倫理審查通知書。
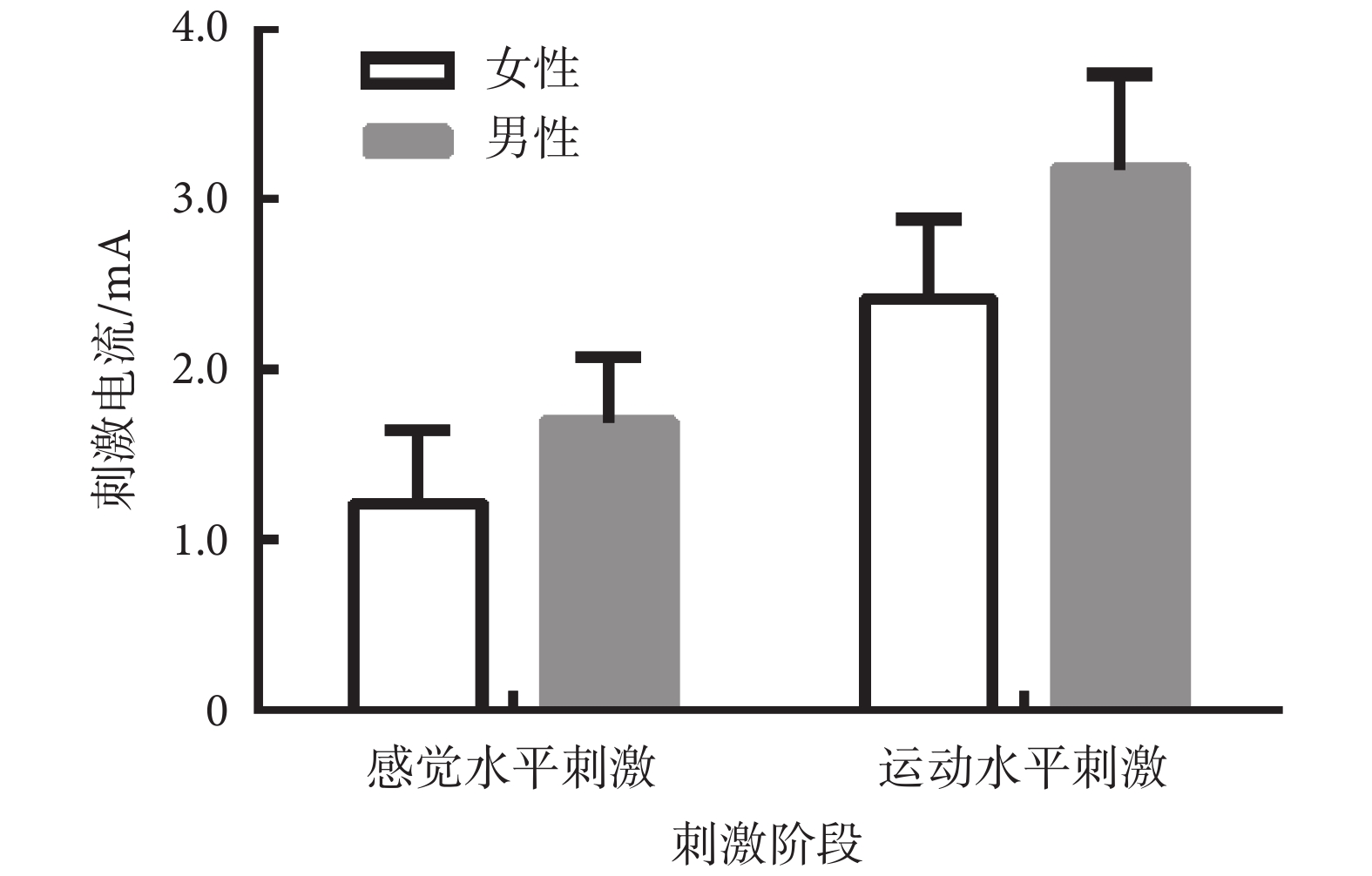
試驗一中選取了 13 名女性和 13 名男性進行驗證試驗。平均年齡在 25 歲,在過去半年內,他們的上肢沒有出現過肌肉損傷和運動神經損傷類似的疾病。主要探究男性和女性達到感覺水平刺激和達到運動水平刺激所需刺激電流的安培數大小及相同階段所需刺激電流安培數在個體間的差異。試驗時,給刺激器上電,將陣列電極貼附于受試者上肢,選通尺側腕伸肌、撓側肌肉和指總伸機上方的電極。尺側腕伸肌是手的伸肌,與兩條撓側肌肉和指總伸肌共同作用實現手指伸展。手指伸展的動作幅度較為明顯,便于試驗的觀察。試驗時,受試者手部保持握拳狀態。sEMG 信號采集電極作用的肌肉與刺激電極作用的是同一塊肌肉,將其放置在同一肌肉的不同位點。在上位機控制界面設置刺激參數,刺激波形選用微分波,刺激信號頻率設置為 20 Hz,因為是短時間試驗驗證,所以選擇的是有極性刺激脈沖,所有受試者在試驗過程中除了刺激強度參數可以改變外,其他刺激參數設置完全一致。所有參數設置完成后點擊界面中開始按鈕。試驗結果如圖 10 所示。
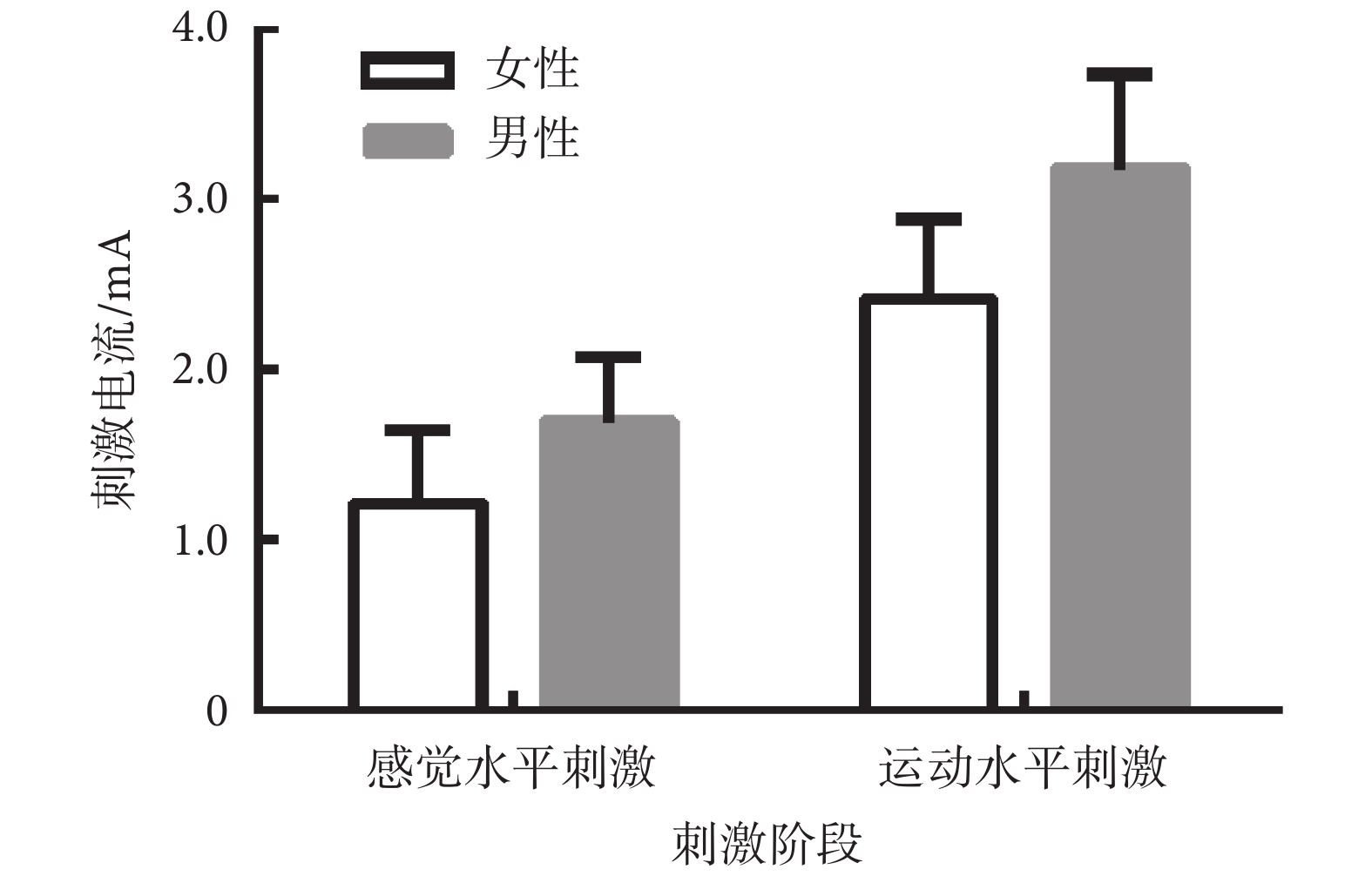 圖10
男性和女性達到相同刺激階段所需均值電流對比圖
Figure10.
Comparison of mean currents required for men and women to reach the same stimulation stage
圖10
男性和女性達到相同刺激階段所需均值電流對比圖
Figure10.
Comparison of mean currents required for men and women to reach the same stimulation stage
如圖 10 所示是男性和女性分別達到相同刺激階段所需刺激電流的均值對比直方圖。達到感覺水平刺激 13 名女性所需刺激電流的均值是 1.2 mA,13 名男性所需刺激電流的均值是 1.7 mA。達到運動水平刺激 13 名女性所需刺激電流的均值是 2.4 mA,13 名男性所需的刺激電流均值是 3.2 mA。從圖 10 中可以看出,達到相同刺激階段男性所需刺激電流安培數大于女性,即女性對電刺激的敏感度要高于男性。除此之外,男性和女性在任一刺激階段上都存在標準差,這驗證了達到相同刺激階段不同個體所需刺激電流安培數存在差異。
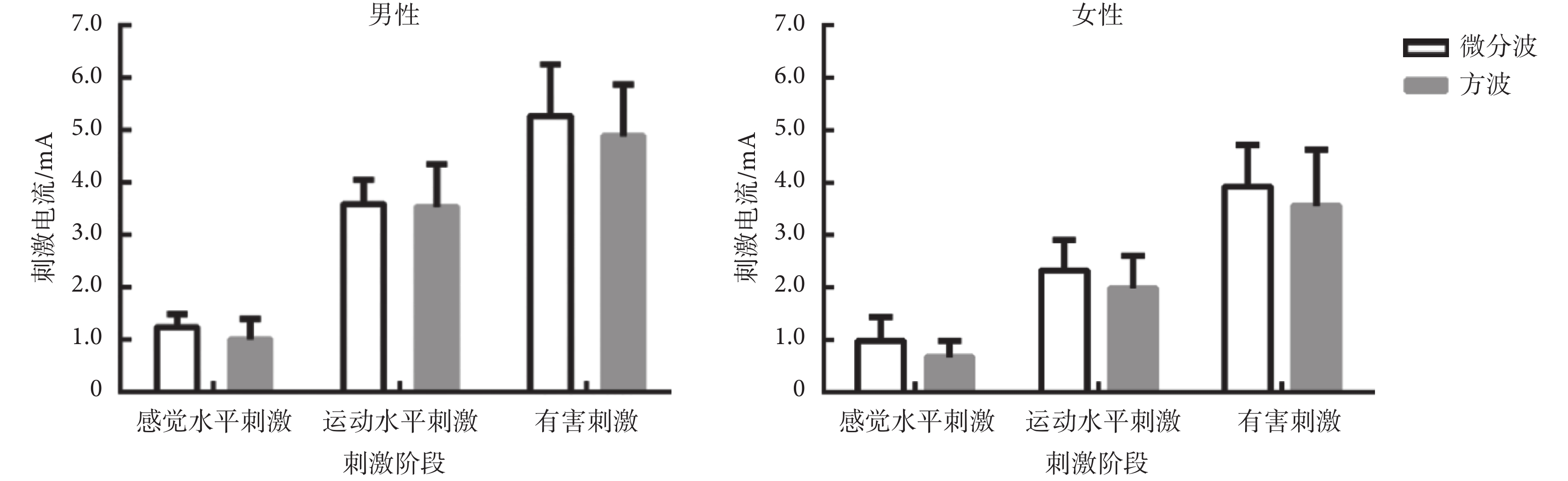
試驗二中選取了 6 名男性和 8 名女性進行試驗,平均年齡在 20 歲。在過去半年內,他們上肢沒有出現過肌肉損傷和運動神經損傷類似的疾病。主要是研究達到感覺水平刺激、運動水平刺激和有害刺激時使用方波和微分波所需刺激電流的安培數是否存在差異。刺激電極位置和 sEMG 信號采集電極位置與試驗一中放置的位置完全一樣。受試者手部仍然保持握拳。控制界面設置的刺激信號是有極性的刺激脈沖,頻率仍然是 20 Hz,試驗結果如圖 11 所示。
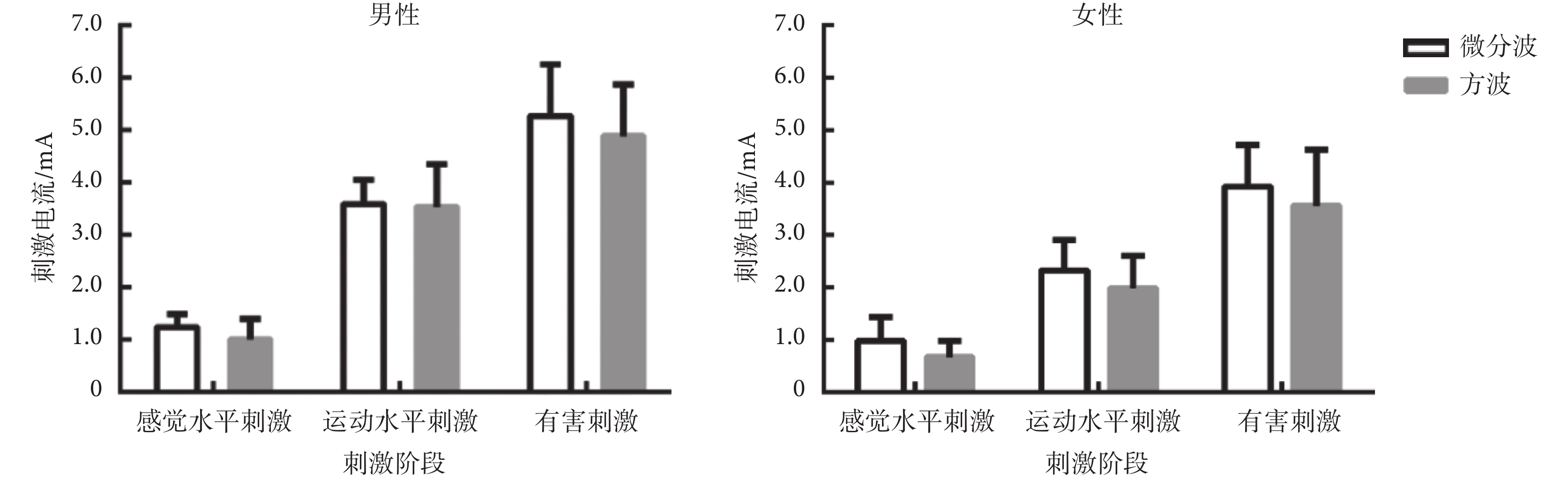 圖11
男性和女性使用不同波形刺激達到相同刺激階段所需均值電流對比圖
Figure11.
Comparison of mean currents required for men and women to use different waveforms to achieve the same stimulation stage
圖11
男性和女性使用不同波形刺激達到相同刺激階段所需均值電流對比圖
Figure11.
Comparison of mean currents required for men and women to use different waveforms to achieve the same stimulation stage
如圖 11 所示是男性和女性分別使用微分波和方波刺激,達到相同刺激階段所需刺激電流的均值對比直方圖。從圖 11 可以看出,達到相同刺激階段,總體來說使用微分波刺激比使用方波刺激所需的刺激電流安培數要大。在有害刺激階段,不管是男性還是女性的標準差都體現的比較明顯,這表明達到相同刺激階段不同個體所需刺激電流安培數的差異在有害刺激階段表現更為明顯。本系統采用可充電鋰電池供電,每次試驗前都進行充電,但是電池儲存的能量會隨著試驗時間增加而消耗,因此達到相同的刺激階段所需的刺激強度也會增加,但這并不會影響電刺激的治療效果,只是刺激強度在物理量上增加了。
在試驗過程中,受試者描述,達到感覺水平刺激時,電流的作用范圍只集中在工作電極下方,此時他們的感受是麻木感。sEMG 信號顯示區上觀察到 sEMG 信號在基線附近上下浮動。隨著刺激電流強度增加,刺激感越來越強烈,電流作用范圍從工作電極下方向四周擴展。直至達到運動水平刺激的閾值時,受試者感覺到了明顯的肌肉收縮同時觀察到了受試者的手指從握拳狀態變為伸直狀態,sEMG 信號顯示區的 sEMG 信號驟升。繼續增加刺激強度,受試者主訴為刺痛感。以上試驗現象驗證了裝置的 FES 結合 sEMG 信號反饋的功能得到實現。
5 結論
本文設計了一套具有 sEMG 信號反饋功能的功能性陣列電極電刺激系統。本文創新之處表現在:一是將刺激電極設計為多通道陣列電極,提高了刺激的準確性和選擇性;二是融入了實時 sEMG 信號反饋系統,使整個裝置形成一個閉環工作系統。刺激器硬件電路中采用了隔離式的元器件保證了系統的安全性和穩定性,使用了柔性陣列電極,實現了同時控制多塊肌肉的目的。利用控制界面中 sEMG 信號圖,一方面可以直觀觀察到患者的治療情況,另一方面可以給患者帶來視覺沖擊,從心理上激發患者的運動欲望,更加有利于患者的康復。
本文通過兩組對比試驗,驗證了達到同樣的刺激階段,所需刺激電流在個體間的差異性。試驗中,電流的刺激確實引起了手指關節的運動,這一現象驗證了電刺激器的功能性。刺激信號的波形、波寬、幅值、頻率等都會影響刺激效率,本文中雖然設計了一套自適應的參數調節系統,但在實際使用過程中效果并不是很明顯,適應個體差異的合適的參數設置方法仍然需要在后續的研究中深入探究。電極的材料也是影響刺激效果的重要因素,雖然本文采用的是柔性電極,但電極與皮膚的契合度還有待提高,探索最佳刺激效果的電極材料也是后續研究的重點。本文中只驗證了系統可以控制手指的伸展,對于更多運動功能的控制還需要進一步探究。
利益沖突聲明:本文全體作者均聲明不存在利益沖突。
引言
中風、腦卒中、脊髓損傷等神經系統疾病常會導致足下垂、偏癱、面癱等后遺癥。在我國,每年因神經系統疾病導致的不同程度上肢運動性功能障礙患者數量高達數百萬人[1-2]。嚴重的患者甚至失去了生活自理的能力,這不僅給他們的心理造成了極大的創傷,也給他們的家庭帶來了巨大負擔,因此目前對上肢偏癱患者進行有效康復治療的需求非常迫切[3]。已有研究表明,偏癱患者的運動功能可以利用電刺激療法得到改善。電刺激療法可以幫助患者重建或者恢復部分運動功能,是一種發展前景極好的神經損傷疾病康復技術[4-6]。
功能性電刺激(functional electrical stimulation,FES)利用一定強度的低頻電流對患者癱瘓部位的一組或多組肌肉組織施加刺激,引發肌肉運動或模擬正常的自主運動來改善或恢復被刺激部位肌肉或肌群的功能。外部電流刺激可以引發癱瘓部位肌肉收縮使相應關節運動,達到運動功能重建或恢復的目的[7-10]。FES 發揮有效治療的前提是患者的神經損傷部位具有完整神經傳導通路。張大威等[11]、王穎娜等[12]、王娟等[13]、Kutlu 等[14]和 Grill 等[15]都探索了 FES 對運動性功能障礙患者在康復訓練中的影響。通過動物實驗和人體試驗,上述研究證實了肌肉的肌力在 FES 作用下較之前有明顯的增強。但是目前,針對上肢康復系統的研究仍然較少,而且大多數動物實驗和臨床人體試驗采用的是開環或者單通道電刺激康復系統,這樣設計不僅會對使用者產生誤刺激,治療過程中還缺乏治療效果的有效實時反饋。同時,由于存在個體差異,針對不同個體治療時,如何調節電刺激器各項參數以適應不同個體也顯得尤為重要。刺激信號強度過大或頻率過高都可能會對肌肉或神經造成損傷,不利于患者康復[15],因此針對不同患者不同程度的偏癱癥狀制定合適高效的治療方案就成為了研究的重點。
基于以上已有的研究基礎和現存問題,本文設計了一種具有多通道實時表面肌電(surface electromyography,sEMG)信號反饋的陣列電極電刺激系統。該系統內部包含了一套閉環的自適應參數調節系統,可針對不同個體進行適當調節。其中,使用的陣列電極是將大塊單通道刺激電極分為一塊塊小的多通道刺激電極,提高了刺激的準確性和選擇性[16]。這是基于單通道的刺激電極往往只能選擇一塊肌肉進行刺激,而陣列電極可以同時選中多塊肌肉進行刺激。陣列電極可以實現不停止刺激器工作的情況下也能動態改變有源電極位置的目的[17]。另外,系統中還配置了實時反饋的 sEMG 信號采集電極,該電極置于皮膚表面,能夠采集皮膚表面神經肌肉活動產生的生物電信號,操作簡單且無創[18]。通過添加這一裝置,在實際操作中臨床醫師可以通過實時觀察生物電信號在治療過程中的變化,更有針對性為患者制定治療方案。最終,通過對系統進行體外測試和人體試驗,期望本文系統的設計能夠滿足便攜、安全、穩定的要求,未來或許可以將本系統應用于臨床試驗。
1 電刺激系統設計
如圖 1 所示,給出了整個電刺激系統的設計流程圖。其中,硬件部分包含 7 個模塊,分別是:微控制器模塊、電源管理模塊、藍牙模塊、升壓模塊、sEMG 信號采集模塊、恒流源模塊以及陣列電極選通模塊。圖 1 中下位機中的箭頭方向表示的是模塊間的控制關系,電源管理模塊為微控制器模塊供電;微控制器模塊控制陣列電極選通模塊的工作;恒流源模塊產生恒定的刺激電流;升壓模塊為恒流源模塊提供足夠的電壓;上位機控制界面是在裝有操作系統 windows7.0(Microsoft Inc.,美國)的計算機上進行設計,使用的編程環境是基于 Windows 平臺應用程序的集成開發環境 Visual Studio 2013(Microsoft Inc.,美國),編寫語言選用 C#語言。控制界面的功能是控制下位機刺激器工作、調節刺激信號參數和實時顯示反饋的 sEMG 信號。系統的工作過程是上位機向下位機發送刺激命令,刺激器收到指令后,通過單片機配置產生相應的刺激信號并借助表面陣列電極作用于人體,同時 sEMG 信號采集電極采集電刺激過程中產生的 sEMG 信號,通過 sEMG 信號接收裝置傳回到上位機控制界面顯示,本系統的使用者可根據控制界面顯示的 sEMG 信號變化而相應調整電刺激參數,從而形成一個閉環的電刺激康復系統。上位機和下位機的數據傳輸通過藍牙轉串口的方式實現,擺脫了有線束縛,使用更加便捷。
圖1
電刺激系統流程圖
Figure1.
Flow chart of electrical stimulation system
2 下位機硬件設計
硬件部分主要用途是產生作用于人體的刺激信號。如前文所述,本系統硬件部分主要分為 7 個模塊,分別是:微控制器模塊、電源管理模塊、藍牙模塊、升壓模塊、sEMG 信號采集模塊、恒流源模塊以及陣列電極選通模塊。整個系統由微控制器模塊控制;電源管理模塊為整個系統供電;藍牙模塊是連接上位機和下位機通信的樞紐;升壓模塊和恒流源模塊相結合保證恒定的電流刺激;sEMG 信號采集模塊是采集刺激位點產生的 sEMG 信號并傳回到上位機顯示,用于評判刺激效果;陣列電極選通模塊是用來選通工作電極,將刺激信號通過貼附在皮膚表面的電極作用于人體。
2.1 微控制器模塊
微控制器作為下位機的主控芯片至關重要。芯片選用的是 STM32F103VET6(ST Inc.,瑞士),該款單片機具有高性價比和大容量的隨機存取存儲器(random access memory,RAM)和閃存存儲器,32 位的內核為實時控制系統提供優良的低功耗性能,低成本、快速的中斷反應、高效的數據處理能力以及豐富的輸入輸出端口都滿足設計的需求[19]。單片機內含的直接內存存取(direct memory access,DMA)可以滿足不同速度硬件設備之間數據的高效傳輸,可以大大提高系統的工作效率。
2.2 電源管理模塊
整個系統由可充電的鋰電池供電,符合便攜式設備的設計理念。電源管理模塊的主要作用是給鋰電池充電。電源管理模塊中電源管理芯片選取的是 FM6316(H&M Semiconductor Inc.,中國),它不僅集成了鋰電池充電管理,還可以將輸入的電池電壓升壓并穩定為 5 V 輸出。在給鋰電池充電時,FM6316 提供了兩個充電指示燈,方便且直觀。可充電鋰電池利用計算機通用串行總線(universal serial bus,USB)接口進行充電。鋰電池的工作電壓為 3.7 V,容量是 2.5 Ah。FM6316 具有過流和欠壓等多重保護電路,可以保證刺激器的安全使用。5 V 穩壓輸出端連接了一個簡單的降壓電路將 5 V 電壓降壓為 3.3 V 為其他模塊供電。系統在充電狀態下不會對外放電,當系統檢測到有外部設備接入時,FM6316 就會通過電池向外部設備供電,無設備接入時,其待機電流為 16 μA,滿足低功耗設計。
2.3 藍牙模塊
無線通信的適用性廣,發展成熟;對比需有線連接的通信設備,無線通信可以增加使用時的移動性和舒適性。本系統中上位機控制界面和下位機刺激器之間的通信方式采用藍牙模式,通過藍牙轉串口的方式進行數據傳輸。上位機控制界面所依附的計算機中沒有藍牙功能,因此本系統中使用了帶有 USB 接口的藍牙適配器。藍牙模塊選用的是 HC-05(深圳市引芯科技發展有限公司 Inc.,中國),工作模式選取的是自動連接模式。一旦藍牙成功連接,就可以當作全雙工串口使用,使用起來非常方便;使用者可以在以計算機為圓心,半徑為 10 m 的范圍以內隨意移動。
2.4 升壓模塊
本系統采用恒流刺激方式,因為恒流刺激可以控制或限制脈沖信號以確保使用者的安全[20]。人體阻抗范圍為 1~3 kΩ,為了保證不同負載得到相同的電流,就要為系統提供足夠大的電壓,升壓模塊可以實現這一功能。升壓控制器選用的是 MCP1650(深圳市誠芯宇科技發展有限公司 Inc.,中國),這款芯片具有低功耗的關斷模式,可以最大限度減小外部電感、電容的尺寸,有利于縮小裝置的體積,符合便攜式設備的設計要求。
在升壓電路中,場效應管和肖特基二極管共同作用,可以允許電壓在較大的范圍內進行轉換,保證了高電壓增益。通過外接電流檢測電阻,可以檢測系統中輸入的峰值電流,一旦發現輸入的峰值電流超過閾值電流,刺激脈沖信號就會被異步終止,防止場效應管被損壞,確保刺激系統使用的安全性。電路中還設計了一個反饋電路,將升壓后的輸出電壓通過兩個分壓電阻接到 MCP1650 的反饋端用以調整輸出電壓的大小。系統的最大輸出電流是 10 mA,使用的兩個分壓電阻的阻值分別為 51 kΩ 和 1 kΩ,5 V 的輸入電壓經過升壓電路處理后,理想的最大輸出電壓在 64 V 左右,實測的電壓在 58 V 左右,也能夠滿足 10 mA 的恒流輸出。
2.5 sEMG 信號采集模塊
sEMG 信號采集模塊的作用是采集電刺激過程中產生的 sEMG 信號。使用的采集設備是便攜式 sEMG 信號采集模塊 EmgServer(北京昌豐科技有限公司 Inc.,中國)。如圖 2 所示,sEMG 信號采集設備由 sEMG 信號采集傳感器、sEMG 信號采集電極以及多通道的 sEMG 信號接收盒組成。sEMG 信號采集電極使用的是心電電極,sEMG 信號采集電極與傳感器共同作用采集電刺激過程中產生的 sEMG 信號,傳感器將采集到的 sEMG 信號通過藍牙傳送到 sEMG 信號接收盒,sEMG 信號接收盒通過 USB 接口將接收到的 sEMG 信號傳入計算機進行顯示。
圖2
sEMG 信號采集設備
Figure2.
sEMG signal acquisition equipment
如圖 3 所示是 sEMG 信號采集流程圖。sEMG 信號采集電極貼附在皮膚表面獲取 sEMG 信號,但是人體產生的 sEMG 信號極其微弱,因此,將采集到的 sEMG 信號通過差分放大電路進行一級放大,提高前端輸入阻抗,降低共模影響。sEMG 信號頻率范圍是 10~500 Hz,為了獲取這一段頻率的信號,將一級放大后的 sEMG 信號送入高通和低通濾波電路,在兩個濾波電路之間加了一個隔離放大電路,一方面將 sEMG 信號進行二級放大,另一方面隔離電路可以對設備起到保護作用。通過濾波電路獲得有效 sEMG 信號之后,再將其送入電平抬高電路進行三級放大,最后采用 50 Hz 工頻陷波器消除工頻干擾。原始的 sEMG 信號通過濾波放大電路進行處理之后再經過模數轉換器將模擬信號轉換成數字信號在計算機上進行顯示。
圖3
sEMG 信號采集流程圖
Figure3.
sEMG signal acquisition flow chart
2.6 恒流源模塊
恒流源模塊是刺激器設計的核心部分。恒流源模塊由刺激波形調理電路、雙極性電刺激切換電路和壓控隔離的恒流源電路構成。刺激波形調理電路的作用是調整數模轉換器(digital to analog converter,DAC)輸出的刺激脈沖電壓。設計刺激波形調理電路是為了便于系統調試,因為有了調理電路,即使參考電壓準確度不高,對輸出的刺激信號影響也不大。
雙極性電刺激切換電路的主要作用是保證刺激電流能在電極間雙向流通,該電路的設計可以有效減少肌肉組織損傷,保證電刺激安全性。如圖 4 所示是雙極性電刺激切換電路模型圖。雙極性電刺激切換電路是由 4 個光耦開關組成的 H 橋換向電路。4 個光耦開關都是低電平導通,它們的狀態通過控制微控制器的兩個引腳的輸出電平就可以進行改變。當光耦開關 U1 和光耦開關 U4 導通時,電流從 A 經過貼附于人體的陣列電極流向 B;當光耦開關 U2 和光耦開關 U3 導通時,電流從 B 經過貼附于人體的陣列電極流向 A。
圖4
雙極性電刺激切換電路模型圖
Figure4.
Model diagram of bipolar electrical stimulation switching circuit
壓控隔離恒流電路中,選用了一個高線性的模擬光電耦合器[21]。光電耦合器由一個發光二極管和兩個光敏二極管組成。發光二極管將運算放大器輸出的電流轉換為同等能量的光能傳遞給兩個光敏二極管,光敏二極管再將光能轉換為電信號經過放大后輸出,這樣的一個過程就完成了電—光—電的轉換,對輸入的電信號和輸出電信號進行隔離。兩個光敏二極管性能完全相同,它們接收同等強度的光并將光轉換為同等大小的電流,一個光敏二極管輸出端的光電流反饋至運放的反相端,利用閉環的反饋電路對另一個光敏二極管輸出端的刺激電流進行調節。光電耦合器的隔離特性保證了電刺激系統良好的電絕緣能力和抗干擾能力。
2.7 陣列電極選通模塊
本系統設計的是 16 通道的陣列電極,為了保證刺激電流在電極間雙向流通,用兩個光耦開關控制一個電極觸點。光耦開關的一端與電極觸點相連,另一端分別與圖 4 中的 A 和 B 相連。16 個電極觸點需要 32 個開關控制,那么 32 個開關的狀態也需要 32 路信號控制,所以選用 4 個 8 位串行輸入、并行輸出的移位緩存器 74HC595(H&M Semiconductor Inc.,中國)級聯輸出 32 路信號控制 32 個開關的狀態。74HC595 控制開關通斷的時間極短,可以保證刺激信號及時加載到電極作用于人體。
如圖 5 所示是陣列電極的示意圖,圖 5 中是 4×4 的 16 通道陣列電極。陣列電極由柔性絕緣層和金屬導電層組成。陣列電極的絕緣層是由聚二甲基硅氧烷(polydimethylsiloxane,PDMS)制作而成,PDMS 擁有良好的通透性,其較低的楊氏模量能更好貼合皮膚。陣列電極的導電層是由金屬銅制作而成,銅的導電性能好且耐腐蝕。16 個金屬觸點采用大小交叉的方式排列,大觸點的邊長為 14 mm 的正方形,小觸點的邊長是 9 mm 的正方形。陣列電極的加工工藝采用微機電技術,利用多次金屬沉積、光刻等成熟的加工工藝,不僅制作周期短,還可以有效改善刺激電流在陣列電極上的傳輸效率。陣列電極通過一個轉接芯片和 16 根灰排線與刺激器電路板相連。在刺激器工作時,只需用膠布圍住陣列電極的四周將其貼在上肢皮膚表面,刺激電流就可以通過陣列電極作用于人體。在刺激電極的選擇上,可以任意選擇陣列電極中一對或多對工作電極。如圖 6 所示,可以同時選擇 5、9、6、10 四個電極觸點為工作電極,它們可以形成圖 6 中虛線框 1 的刺激電場 1,也可以選擇 4 和 8 兩個電極觸點為工作電極,它們可以形成虛線框 2 的刺激電場 2,選中的工作電極互為參考電極。
圖5
陣列電極圖
Figure5.
Array electrode diagram
圖6
陣列電極選通示意圖
Figure6.
Schematic diagram of array electrode gating
3 軟件設計
3.1 下位機刺激程序設計
刺激程序與刺激電路板結合輸出刺激電流。如圖 7 所示是刺激程序的設計流程圖。在上位機控制界面點擊開始按鈕后,刺激信號相關參數的設置指令以及控制命令就會通過藍牙發送到刺激器電路板上的微控制器中。參數指令包括刺激信號波形數據以及設置刺激信號的頻率、幅值、工作電極和刺激信號方向。微控制器收到命令后就會通過調整計時器設置頻率;調整刺激電流強度設置幅值;控制 74HC595 選通實際工作的電極;控制雙極性電刺激切換電路設置刺激信號的導通方向。所有參數設置完成后,微控制器就會開啟 DMA 將參數數據保存至閃存存儲器中。程序設計中開辟了兩塊存儲空間 RAM1 和 RAM2。首先 DMA 將參數數據保存到 RAM1 中,當刺激器收到啟動命令后,DMA 就會將 RAM1 中的數據傳送到 DAC 中產生相應的刺激電流,同時,DMA 將下一次的參數數據保存到 RAM2 中,當 RAM1 中的數據傳送完成后繼續傳送 RAM2 中的數據到 DAC 產生刺激電流。如圖 8 所示是刺激信號數據傳輸流程圖,其中 DMA、RAM1、RAM2 以及 DAC 共同作用產生刺激電流的過程不需要中央處理器(central processing unit,CPU)的干預,可以釋放 CPU 提高程序的運行效率。RAM1 和 RAM2 雙緩存交替傳輸數據,不僅提高了系統的工作效率,還提高了系統的穩定性。
圖7
刺激器程序設計流程圖
Figure7.
Stimulator programming flow chart
圖8
刺激信號數據傳輸流程圖
Figure8.
Flow chart of stimulus signal data transmission
3.2 上位機界面設計
如圖 9 所示是上位機控制界面。界面由電極選通模塊、刺激波形控制模塊、刺激波形顯示模塊、參數調節模塊、治療時長選擇模塊和 sEMG 信號顯示模塊組成。電極選通模塊由 16 個按鈕組成,用來模擬 16 通道的陣列電極,用三種顏色區分電極的狀態,紅色代表電流流進的電極,綠色代表電流流出的電極,灰色代表電極沒有被選中。
圖9
上位機控制界面
Figure9.
Host computer control interface
刺激波形控制模塊由模式選擇、刺激脈沖極性、刺激波形以及刺激包絡組成。模式選擇中設置了三種模式,模式一和模式二屬于自動模式,自動模式是工作電極已設定;模式三是手動模式,使用者可以根據自己的需求設置工作電極。系統中設置了微分波和方波兩種刺激波形,刺激波形與適應癥相關聯。選擇微分波時,對應的適應癥是偏癱;選擇方波時,對應的適應癥是身體疼痛。根據刺激電流通過皮膚的方向,將刺激電流極性設置為有極性和無極性兩種。有極性刺激電流指的是單相脈沖波,無極性刺激電流指的是雙相脈沖波。單相波釋放單相電流脈沖,雙相脈沖波先后釋放兩個方向相反的電流脈沖。短時間的治療可以選擇有極性刺激脈沖,刺激信號強度在短時間內可以迅速上升,一段時間后又可以迅速下降,工作效率高。長時間治療選擇無極性的刺激脈沖可以減少肌肉組織損傷。而刺激包絡分為有調制和無調制兩種選擇。刺激波形顯示區顯示的是選擇的刺激信號波形,有調制的刺激信號的波形在刺激波形顯示區是隨機變化的,無調制的刺激信號的波形在刺激波形顯示區是穩定的。
參數調節模塊包括刺激信號幅度和頻率的調節。刺激信號的頻率設置范圍是 1~1 000 Hz,輸出電流的設置范圍是 1~10 mA。在電刺激治療過程中,使用者還可以根據自己的需要設置治療的時長。sEMG 信號波形顯示模塊的功能是顯示刺激過程中產生的 sEMG 信號。sEMG 信號的通道數是可變的,最大通道數是 4 通道。所有刺激參數設置完成后,點擊開始按鈕,參數設置指令通過藍牙傳送到下位機刺激器,同時,sEMG 信號波形顯示區也開始工作,顯示采集的 sEMG 信號。程序中還設置了記錄 sEMG 信號的功能,點擊開始記錄和停止記錄兩個按鈕可以隨意保存采集到的一段 sEMG 信號用以分析。
當人體接受電刺激治療時,正常人體通常會經歷三個階段的刺激反應:感覺水平刺激、運刺水平刺激和有害刺激。在相對低強度刺激下,使用者首先經歷的是感覺水平刺激。達到感覺水平刺激時,使用者最明顯的感受是麻木感。隨著刺激強度逐漸增大,由于募集到的感覺神經纖維越來越多,患者的刺痛感逐漸增強,另外位于外周神經中支配骨骼肌的 α 運動神經元軸突很快達到其閾值。在完整神經系統中,α 運動神經元軸突被動興奮從而產生肌肉收縮,這一階段稱為運動水平刺激。達到運動水平刺激時,使用者能感受到明顯的肌肉收縮并伴隨著動作反應。刺激強度進一步加強,使用者就會感受到電刺激帶來的疼痛感,這一階段稱為有害刺激。
每個人的肌肉狀態都是不一樣的,刺激參數的設置也要因人而異,因此本系統中設計了一個閉環的刺激參數自適應調節系統,此系統可根據不同的使用者自動調整適合他們的刺激參數。自適應參數調節系統的工作過程是首先設置一個達到感覺水平刺激的刺激參數給刺激器,然后程序中設計隨著治療時間增加,刺激參數逐漸增大,此時刺激部位的肌力也隨之增加。運動水平刺激伴隨著動作反應,而感覺水平刺激只產生麻木感,因此感覺水平刺激產生的 sEMG 信號強度會明顯小于運動水平刺激產生的 sEMG 信號強度。當 sEMG 信號顯示區的 sEMG 信號強度突增時,感覺水平刺激就升級為運動水平刺激。達到運動水平刺激后,刺激參數仍然隨著時間在增加,但是,刺激參數不會隨著時間無限制增加,當運動水平刺激持續一段時間后,刺激部位肌肉耐力下降,sEMG 信號強度也會隨之減弱。當 sEMG 信號顯示區的 sEMG 信號強度驟降時,刺激參數就會自動減小,此時運動水平刺激就向感覺水平刺激轉變,以達到放松肌肉的目的。肌肉放松一段時間后,刺激參數又會隨著治療時間增加。在選擇的治療時長內,刺激參數都是按照以上規律循環變化。通過 sEMG 信號控制刺激參數的變化形成了一個閉環的自適應刺激參數調節系統,可以解決因個體差異帶來的刺激參數設置問題。
4 試驗驗證
人體試驗的目的一共有三個:一是為了驗證達到相同刺激階段,所需刺激電流的安培數在個體間是否存在差異;二是為了驗證達到相同刺激階段時,使用方波刺激和微分波刺激所需刺激電流的安培數是否存在差異;三是為了驗證刺激系統是否能實現功能性刺激,即刺激控制某一動作的相關肌肉是否能產生相應動作反應。人體試驗分兩次進行,試驗中所有志愿者都是來自上海健康醫學院的學生。數據采集地是上海健康醫學院實驗室。試驗前,已經詳細告知所有受試者試驗的目的、儀器使用的原理和試驗要求,并獲得了受試者知情同意書和數據信息使用授權書。整個試驗已經通過了上海健康醫學院醫學倫理審查并獲得倫理審查通知書。
試驗一中選取了 13 名女性和 13 名男性進行驗證試驗。平均年齡在 25 歲,在過去半年內,他們的上肢沒有出現過肌肉損傷和運動神經損傷類似的疾病。主要探究男性和女性達到感覺水平刺激和達到運動水平刺激所需刺激電流的安培數大小及相同階段所需刺激電流安培數在個體間的差異。試驗時,給刺激器上電,將陣列電極貼附于受試者上肢,選通尺側腕伸肌、撓側肌肉和指總伸機上方的電極。尺側腕伸肌是手的伸肌,與兩條撓側肌肉和指總伸肌共同作用實現手指伸展。手指伸展的動作幅度較為明顯,便于試驗的觀察。試驗時,受試者手部保持握拳狀態。sEMG 信號采集電極作用的肌肉與刺激電極作用的是同一塊肌肉,將其放置在同一肌肉的不同位點。在上位機控制界面設置刺激參數,刺激波形選用微分波,刺激信號頻率設置為 20 Hz,因為是短時間試驗驗證,所以選擇的是有極性刺激脈沖,所有受試者在試驗過程中除了刺激強度參數可以改變外,其他刺激參數設置完全一致。所有參數設置完成后點擊界面中開始按鈕。試驗結果如圖 10 所示。
圖10
男性和女性達到相同刺激階段所需均值電流對比圖
Figure10.
Comparison of mean currents required for men and women to reach the same stimulation stage
如圖 10 所示是男性和女性分別達到相同刺激階段所需刺激電流的均值對比直方圖。達到感覺水平刺激 13 名女性所需刺激電流的均值是 1.2 mA,13 名男性所需刺激電流的均值是 1.7 mA。達到運動水平刺激 13 名女性所需刺激電流的均值是 2.4 mA,13 名男性所需的刺激電流均值是 3.2 mA。從圖 10 中可以看出,達到相同刺激階段男性所需刺激電流安培數大于女性,即女性對電刺激的敏感度要高于男性。除此之外,男性和女性在任一刺激階段上都存在標準差,這驗證了達到相同刺激階段不同個體所需刺激電流安培數存在差異。
試驗二中選取了 6 名男性和 8 名女性進行試驗,平均年齡在 20 歲。在過去半年內,他們上肢沒有出現過肌肉損傷和運動神經損傷類似的疾病。主要是研究達到感覺水平刺激、運動水平刺激和有害刺激時使用方波和微分波所需刺激電流的安培數是否存在差異。刺激電極位置和 sEMG 信號采集電極位置與試驗一中放置的位置完全一樣。受試者手部仍然保持握拳。控制界面設置的刺激信號是有極性的刺激脈沖,頻率仍然是 20 Hz,試驗結果如圖 11 所示。
圖11
男性和女性使用不同波形刺激達到相同刺激階段所需均值電流對比圖
Figure11.
Comparison of mean currents required for men and women to use different waveforms to achieve the same stimulation stage
如圖 11 所示是男性和女性分別使用微分波和方波刺激,達到相同刺激階段所需刺激電流的均值對比直方圖。從圖 11 可以看出,達到相同刺激階段,總體來說使用微分波刺激比使用方波刺激所需的刺激電流安培數要大。在有害刺激階段,不管是男性還是女性的標準差都體現的比較明顯,這表明達到相同刺激階段不同個體所需刺激電流安培數的差異在有害刺激階段表現更為明顯。本系統采用可充電鋰電池供電,每次試驗前都進行充電,但是電池儲存的能量會隨著試驗時間增加而消耗,因此達到相同的刺激階段所需的刺激強度也會增加,但這并不會影響電刺激的治療效果,只是刺激強度在物理量上增加了。
在試驗過程中,受試者描述,達到感覺水平刺激時,電流的作用范圍只集中在工作電極下方,此時他們的感受是麻木感。sEMG 信號顯示區上觀察到 sEMG 信號在基線附近上下浮動。隨著刺激電流強度增加,刺激感越來越強烈,電流作用范圍從工作電極下方向四周擴展。直至達到運動水平刺激的閾值時,受試者感覺到了明顯的肌肉收縮同時觀察到了受試者的手指從握拳狀態變為伸直狀態,sEMG 信號顯示區的 sEMG 信號驟升。繼續增加刺激強度,受試者主訴為刺痛感。以上試驗現象驗證了裝置的 FES 結合 sEMG 信號反饋的功能得到實現。
5 結論
本文設計了一套具有 sEMG 信號反饋功能的功能性陣列電極電刺激系統。本文創新之處表現在:一是將刺激電極設計為多通道陣列電極,提高了刺激的準確性和選擇性;二是融入了實時 sEMG 信號反饋系統,使整個裝置形成一個閉環工作系統。刺激器硬件電路中采用了隔離式的元器件保證了系統的安全性和穩定性,使用了柔性陣列電極,實現了同時控制多塊肌肉的目的。利用控制界面中 sEMG 信號圖,一方面可以直觀觀察到患者的治療情況,另一方面可以給患者帶來視覺沖擊,從心理上激發患者的運動欲望,更加有利于患者的康復。
本文通過兩組對比試驗,驗證了達到同樣的刺激階段,所需刺激電流在個體間的差異性。試驗中,電流的刺激確實引起了手指關節的運動,這一現象驗證了電刺激器的功能性。刺激信號的波形、波寬、幅值、頻率等都會影響刺激效率,本文中雖然設計了一套自適應的參數調節系統,但在實際使用過程中效果并不是很明顯,適應個體差異的合適的參數設置方法仍然需要在后續的研究中深入探究。電極的材料也是影響刺激效果的重要因素,雖然本文采用的是柔性電極,但電極與皮膚的契合度還有待提高,探索最佳刺激效果的電極材料也是后續研究的重點。本文中只驗證了系統可以控制手指的伸展,對于更多運動功能的控制還需要進一步探究。
利益沖突聲明:本文全體作者均聲明不存在利益沖突。