支撐減重康復訓練系統現已成為下肢運動功能障礙康復的重要治療方法。本文針對現有的恒定阻抗減重的骨盆支撐減重康復系統在康復訓練過程中骨盆機構提供固定的運動軌跡、患者主動參與康復訓練程度低等問題,提出了一種跟隨人體重心高度(CoMH)的骨盆支撐減重康復系統。該系統通過慣性測量單元采集人體下肢運動信息,經過人工神經網絡對CoMH進行預測,實現骨盆支架高度的跟蹤控制。通過偏癱患者康復訓練進行試驗,結果表明,相比于骨盆支架運動軌跡固定的傳統減重康復訓練,跟隨CoMH骨盆支撐減重康復訓練使患者患側髖、膝關節活動范圍分別提升25.0%和31.4%,患側擺動相與支撐相占比更接近健側步態相位。該減重康復訓練模式的骨盆支架的運動軌跡取決于當前訓練者的狀態,可實現偏癱患者健側主動運動引導行走訓練。動態調整減重支撐的策略更有助于提高行走康復訓練效率。
引用本文: 何秉澤, 石萍, 李新偉, 范萌, 鄧志鵬, 喻洪流. 一種跟隨人體重心高度的骨盆支撐減重康復系統. 生物醫學工程學雜志, 2022, 39(1): 175-184. doi: 10.7507/1001-5515.202103035 復制
版權信息: ?四川大學華西醫院華西期刊社《生物醫學工程學雜志》版權所有,未經授權不得轉載、改編
引言
我國每年新發腦卒中患者約200萬人,其中約85%留有肢體運動功能障礙,70%以上患者通過早期步行訓練可恢復行走能力,但是對于偏癱等運動功能受損患者,要進行獨立行走訓練是非常困難的[1]。臨床數據表明,減重(body weight support,BWS)康復訓練系統可有效改善患者運動功能、下肢平衡功能及日常生活能力,提高患者的生活質量[2]。BWS康復步行訓練系統通過懸吊或者支撐裝置減少患者的下肢負荷,使患者在支撐能力不足的情況下也能以良好的步行姿態進行正常的步行訓練。同時,患者在醫用跑臺的帶動下邁步,能夠激活運動皮質和脊髓節律性運動中樞,從而加強患者的下肢肌群肌力,增強下肢髖關節、膝關節和踝關節的穩定性,提高患者步行運動時各關節、肌群及神經支配的協調性,最終幫助患者改善或者恢復下肢運動和行走能力[3-7]。此外,減重裝置能夠為患者提供安全感,消除患者在步行訓練時的緊張感和恐懼[8-10]。
行走可以被定義為一系列失去和恢復平衡的過程,在這一系列過程中,人體質量中心(center of mass,CoM)位置是在不斷發生變化的。在BWS步行康復訓練系統研究和設計過程中,受試者CoM在垂直方向的位移即重心高度(center of mass height,CoMH)值得特別關注[11]。目前,市場上已投入使用的BWS康復訓練系統可以分為被動型系統和主動型系統兩大類。被動型的BWS康復系統又包括靜平衡系統、被動配重系統和被動彈性力減重系統[12]。這類被動型減重康復系統具有結構簡單、操作方便等優點,但沒有額外的動力輸入,且在康復訓練過程中不能實時調節配重。患者在步行訓練時,由于在垂直方向上存在向上或者向下的加速度,減重系統提供的減重力會隨著CoMH的變化而變化[13],使患者在訓練過程中有失重和超重的起伏感,從而導致訓練效果不佳[11]。
主動型系統一般由力傳感器、控制器和執行器組成。該類型減重康復訓練系統通過力傳感器實時比較減重力的真實值和預設值,由執行機構提供額外的動力輸入,進而實現減重力的閉環控制。常見的幾種動力驅動方式有:電力驅動、氣壓驅動和液壓驅動。Rifton設備公司的Pacer步態訓練器采用高度可調節的鞍座來輔助步態訓練[14],并使用氣動推桿來提供動力。上海理工大學設計研發的壓差式氣動減重康復步行訓練系統[15],通過空氣壓差技術進行減重,以輔助患者站立和行走。加拿大卡爾頓大學設計的GaitEnable[16]、新加坡國立大學設計的Robotic Walker[17]以及美國伊利諾伊大學設計的KineAssist[18]通過使用電力驅動的線性執行機構和骨盆支架為患者提供主動BWS和部分被動骨盆運動。Gordon等[19]發明了一種液壓驅動的BWS康復系統,同樣也是基于力閉環控制以達到主動BWS的目的。上述BWS康復訓練系統消除了配重塊或彈性器件的慣性沖擊,可以顯著提高減重力的控制精度,且可以在不停止設備的情況下無縫地調整減重力。但上述幾種下肢康復訓練減重支撐系統均存在一些缺點,如在使用過程中,骨盆支架在豎直方向的運動軌跡是固定的,患者微小的步速或步幅的變化就會導致骨盆支架高度與患者的CoMH不一致,使患者一直處于被動地適應康復設備的訓練狀態,進而影響康復訓練的效果[20]。
因此,本文目的是在現有BWS康復訓練系統研究的基礎上,設計一種CoMH跟隨的主動式BWS康復訓練系統,建立基于慣性測量單元(inertial measurement unit,IMU)預測人體CoMH的模型。基于該模型的BWS康復訓練系統的骨盆支架可以在患者切換不同步速和步幅的情況下準確快速地調整至與CoMH相對應的高度,從而實現由偏癱患者健側主動運動引導行走訓練。此外,本研究還對比了兩種不同的神經網絡——誤差反向傳播(error back propagation training,BP)神經網絡和門控循環單元(gated recurrent unit,GRU)網絡對預測模型精度的影響。
1 系統設計
1.1 系統結構
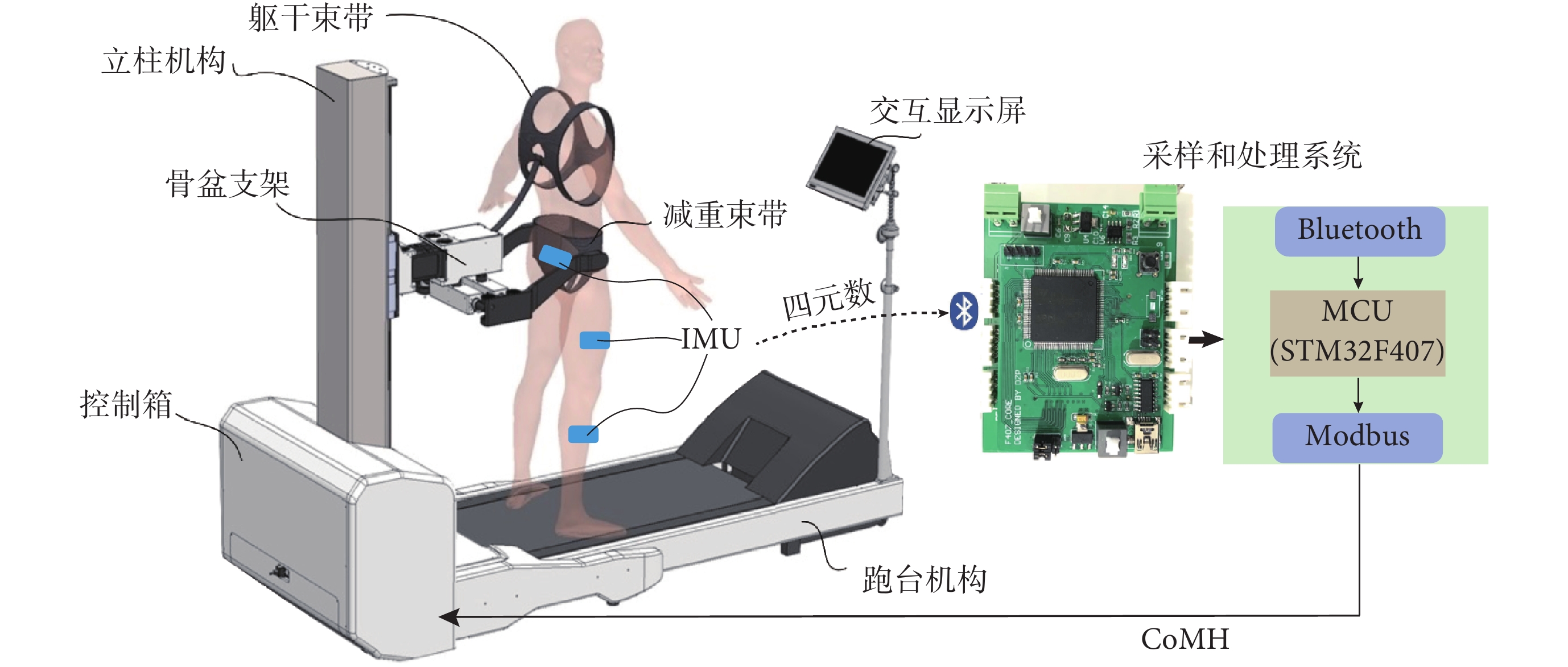
BWS康復訓練系統結構如圖1所示。該系統由步態減重訓練設備和CoMH預測設備組成。步態減重訓練設備主要包括跑臺機構、立柱機構、骨盆支架(機構)、減重束帶、軀干束帶、控制箱和交互顯示屏。CoMH預測設備由三個IMU姿態采集模塊和一個數據接收模塊組成。每個IMU姿態采集模塊的大小為35 mm×50 mm×15 mm,其內部包含一個LPMS-ME1 IMU傳感器、一個電池(3.7 V,80 mAh)和一個藍牙模塊。IMU傳感器整合了三軸加速度計(?16~16 g)、三軸陀螺儀(?2 000~2 000 dps)和三軸磁力計等傳感器(?16~16 Gauss)。數據采集系統包含一個微處理器(MCU,STM32F407ZE)以及與三個IMU姿態采集模塊配對的藍牙模塊。
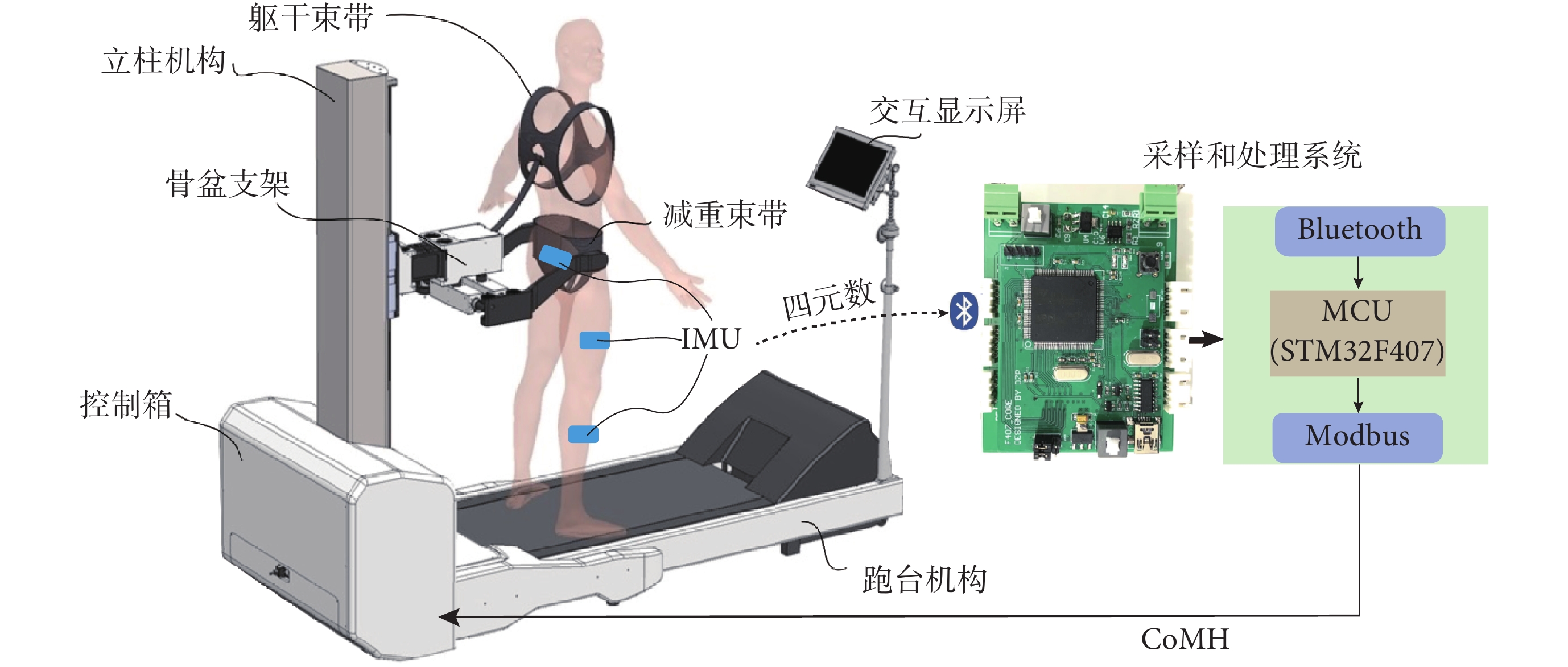 圖1
具有CoMH跟隨的主動式BWS康復訓練系統結構
Figure1.
Structure of active BWS rehabilitation training system with CoMH tracing
圖1
具有CoMH跟隨的主動式BWS康復訓練系統結構
Figure1.
Structure of active BWS rehabilitation training system with CoMH tracing
三個IMU采集模塊分別以100 Hz的采樣率采集受試者小腿和大腿的位置信號并通過藍牙發送到數據接收系統。MCU處理信號并計算CoMH,通過UART將CoMH以ModBUS協議的格式發送至訓練設備的控制系統。控制系統將接收到的CoMH數據解析之后發送至電機驅動,實時調節骨盆支架高度,實現對患者CoMH的實時跟蹤。
1.2 CoMH跟蹤方法
1.2.1 髖、膝關節運動角度計算方法
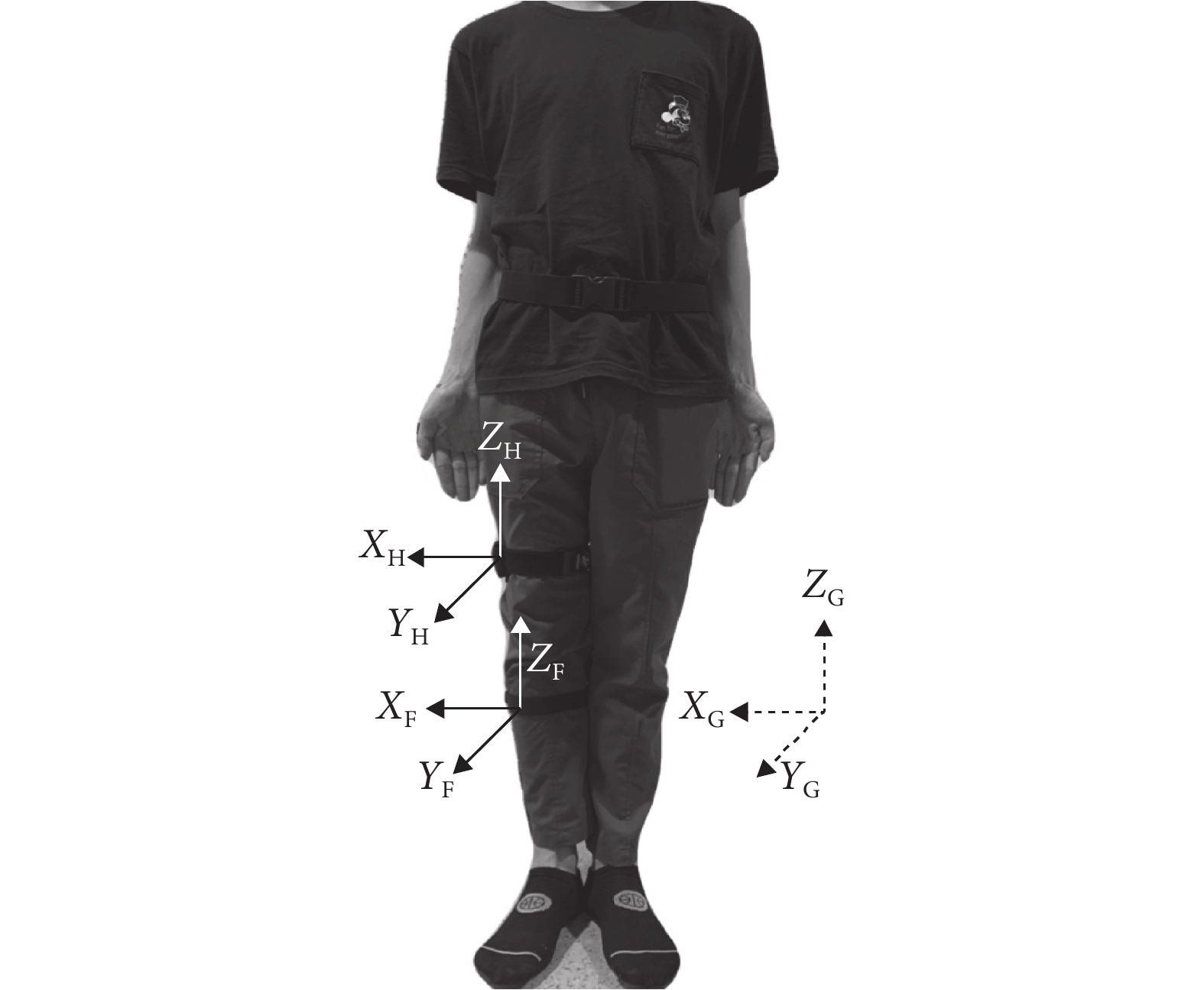
由于IMU在測量各關節歐拉角時會出現萬向節鎖的情況,導致CoMH計算錯誤,故而采用四元數對各關節角度進行解算。如圖2所示,全局坐標系  定義為:X軸指向側面,Y軸向前,Z軸向上。假設最初股骨參考坐標系
定義為:X軸指向側面,Y軸向前,Z軸向上。假設最初股骨參考坐標系  和小腿參考坐標系
和小腿參考坐標系  與全局坐標系重合,因此能夠確定旋轉矩陣
與全局坐標系重合,因此能夠確定旋轉矩陣  和
和  ,其中 R 表示旋轉矩陣;上標 i 表示初始位置;下標G、H和F分別表示全局參考坐標系、股骨參考坐標系和小腿參考坐標系。
,其中 R 表示旋轉矩陣;上標 i 表示初始位置;下標G、H和F分別表示全局參考坐標系、股骨參考坐標系和小腿參考坐標系。
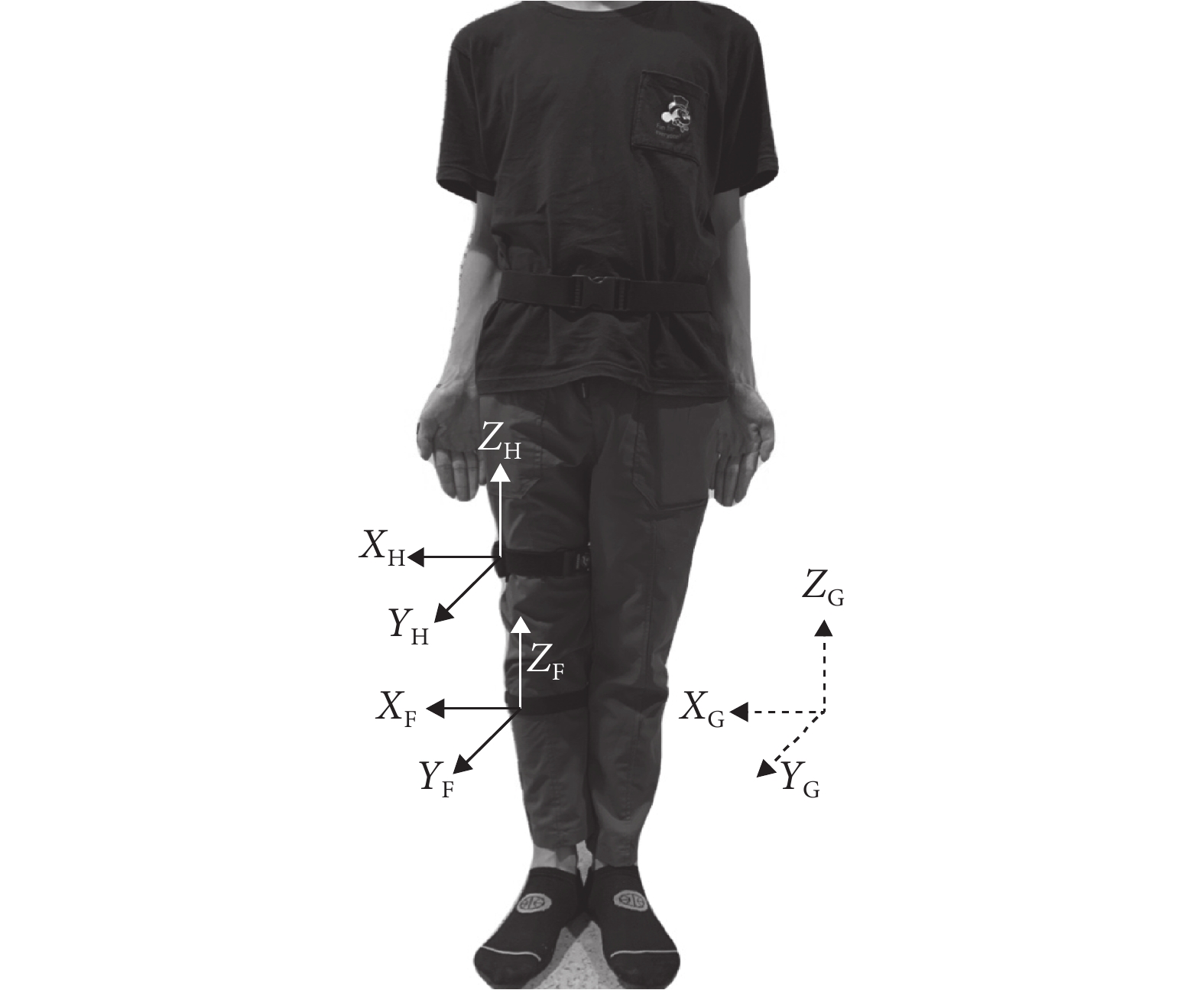 圖2
人體下肢全局參考坐標系以及各關節局部參考坐標系
Figure2.
Global reference coordinate system and local reference coordinate system
圖2
人體下肢全局參考坐標系以及各關節局部參考坐標系
Figure2.
Global reference coordinate system and local reference coordinate system
大腿坐標系相對于第一個IMU坐標系和小腿坐標系相對于第二個IMU坐標系的取向分別表示如下:
 |
其中,下標U表示佩戴在大腿上的第一IMU坐標系,下標L表示佩戴在小腿上的第二IMU坐標系。
當受試者下肢移動到新的姿勢時,全局坐標系中的大腿和小腿的姿態可以由以下旋轉矩陣描述:
 |
其中,上標 f 表示下一時刻的動作,上標 i 表示初始時刻動作。
從大腿處的IMU獲得四元數  ,其中(x, y, z)是向量,w是標量。
,其中(x, y, z)是向量,w是標量。
 |
股骨旋轉矩陣在全局坐標系中表示如下:
 |
股骨與脛骨之間的相對歐拉角  、
、 、
、 ,它們分別為回轉角、俯仰角和偏轉角,可以寫成如下形式:
,它們分別為回轉角、俯仰角和偏轉角,可以寫成如下形式:
 |
其中, 、
、 分別是
分別是  、
、 的簡寫,其余同理。
的簡寫,其余同理。
從上面的式子可以計算3個髖關節角度:
 |
 |
 |
其中, 代表髖關節屈曲/伸展,
代表髖關節屈曲/伸展, 代表髖關節內收/外展,
代表髖關節內收/外展, 代表髖關節內/外旋轉。
代表髖關節內/外旋轉。
1.2.2 CoMH預測方法
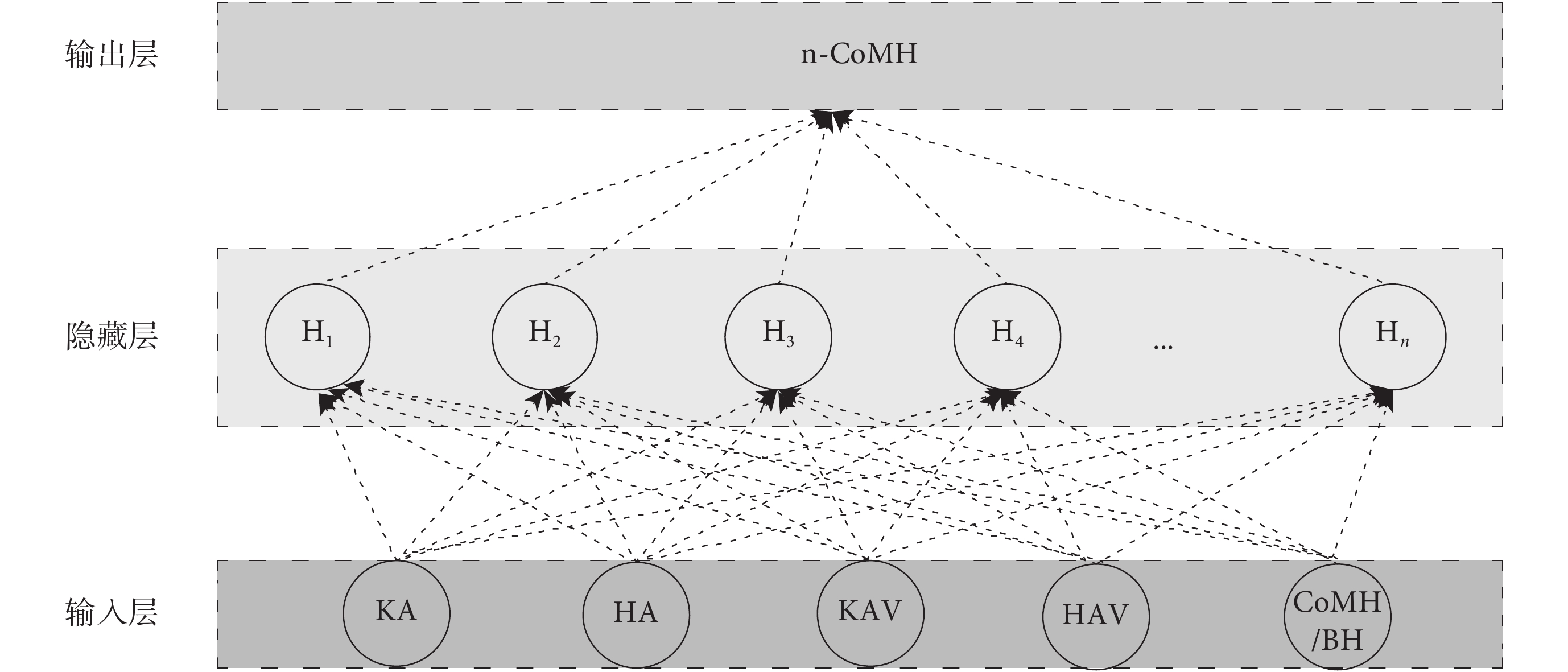
本文分別采用BP神經網絡和GRU網絡對CoMH進行預測。對于不同的受試者,其CoMH與身高等因素相關,因此本研究將每名受試者直立靜止時的CoMH與身高的比值(CoMH/BH)做為一項特征參數,同時將受試者在試驗過程中采集到的CoMH對身高做歸一化處理,得到歸一化重心高度(n-CoMH),最終形成具有6個特征的訓練數據。輸入特征為髖關節屈曲角度(hip angle,HA)、膝關節屈曲角度(knee angle,KA)、髖關節角速度(hip angle velocity,HAV)、膝關節角速度(knee angle velocity,KAV)以及CoMH/BH,輸出特征為n-CoMH。
基于BP神經網絡的預測模型由一個輸入層、一個隱藏層和一個輸出層組成,如圖3所示。
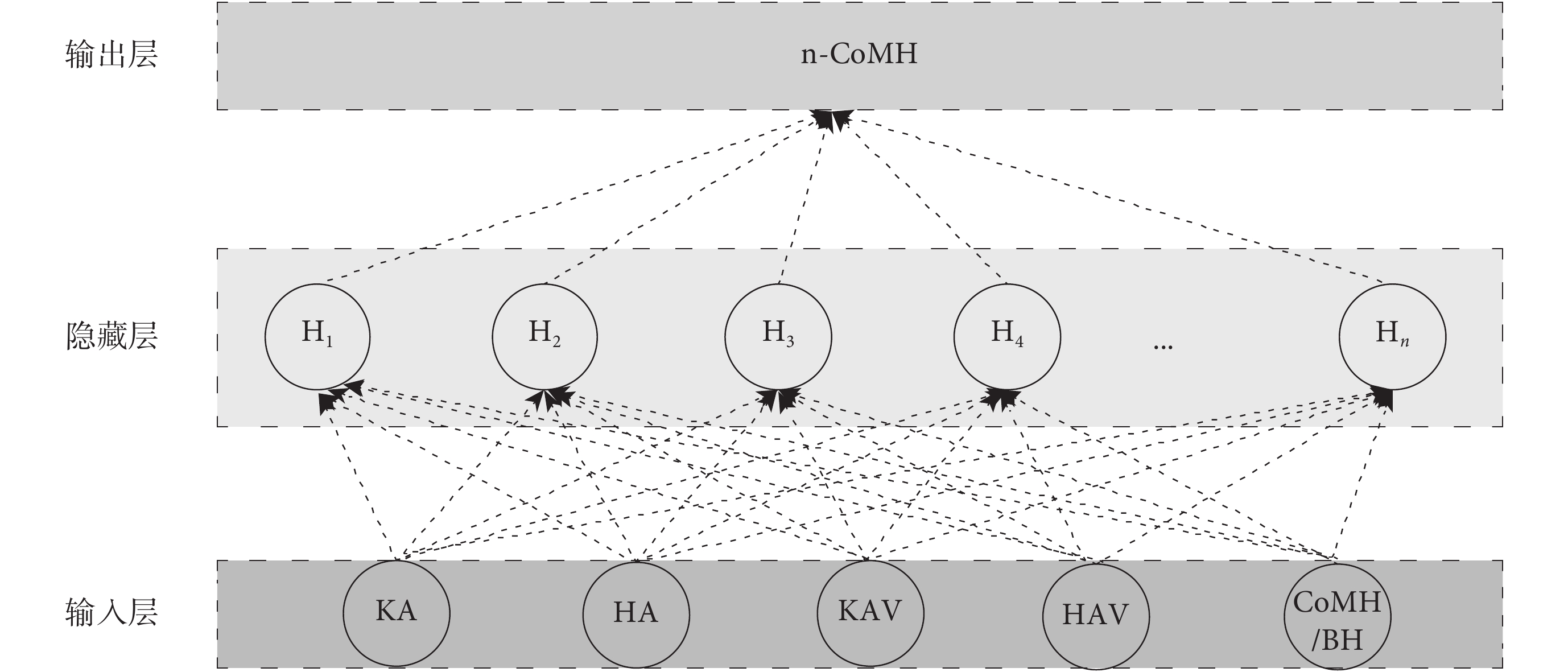 圖3
BP神經網絡結構
Figure3.
Structure of BP neural network
圖3
BP神經網絡結構
Figure3.
Structure of BP neural network
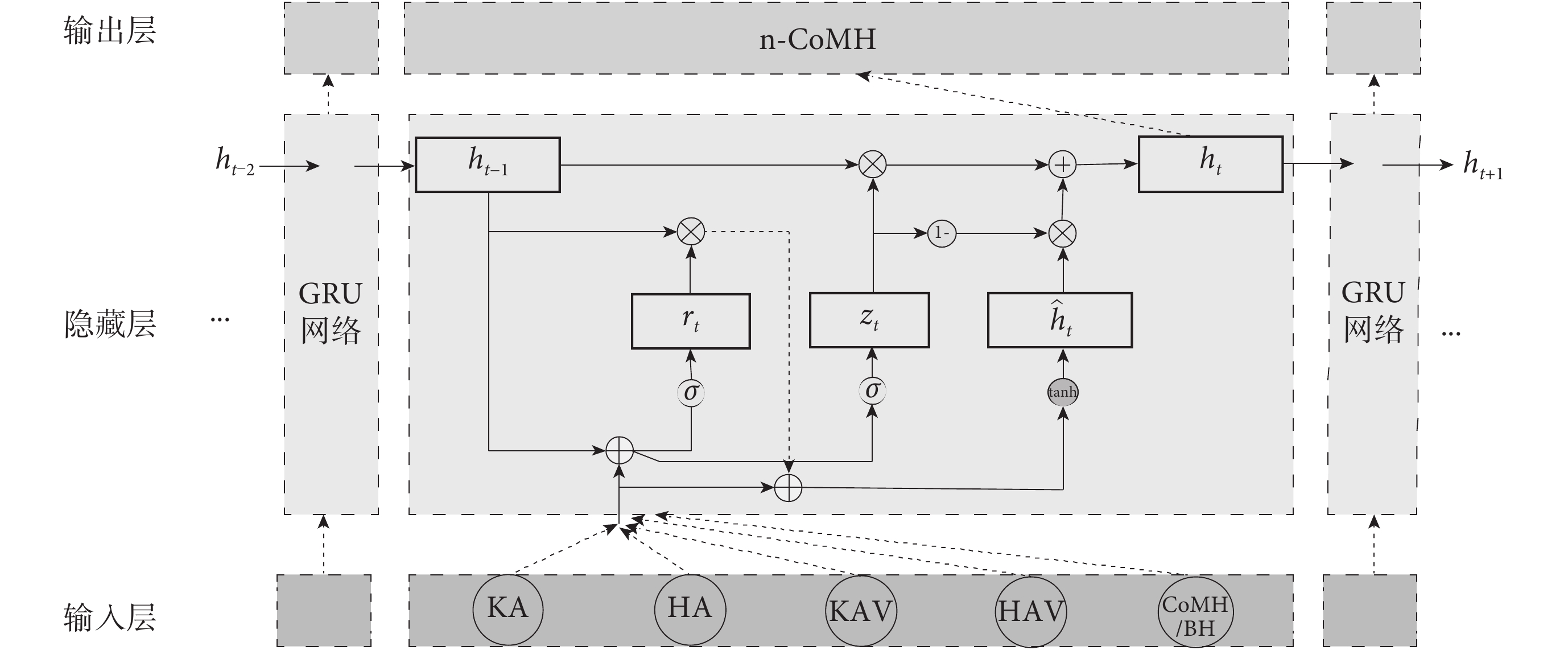
GRU網絡[21]是循環神經網絡(recurrent neural network,RNN)的一種變體,因其可以有效解決簡單RNN的梯度爆炸或消失的問題,被廣泛應用于各領域。該類神經網絡具有短期記憶能力,其神經元不但可以接受其他神經元的信息,也可以接受自身的信息,形成具有環路的網絡結構,因此對于預測CoMH這類的時間序列具有較高的預測精度。本文使用的GRU網絡結構如圖4所示。
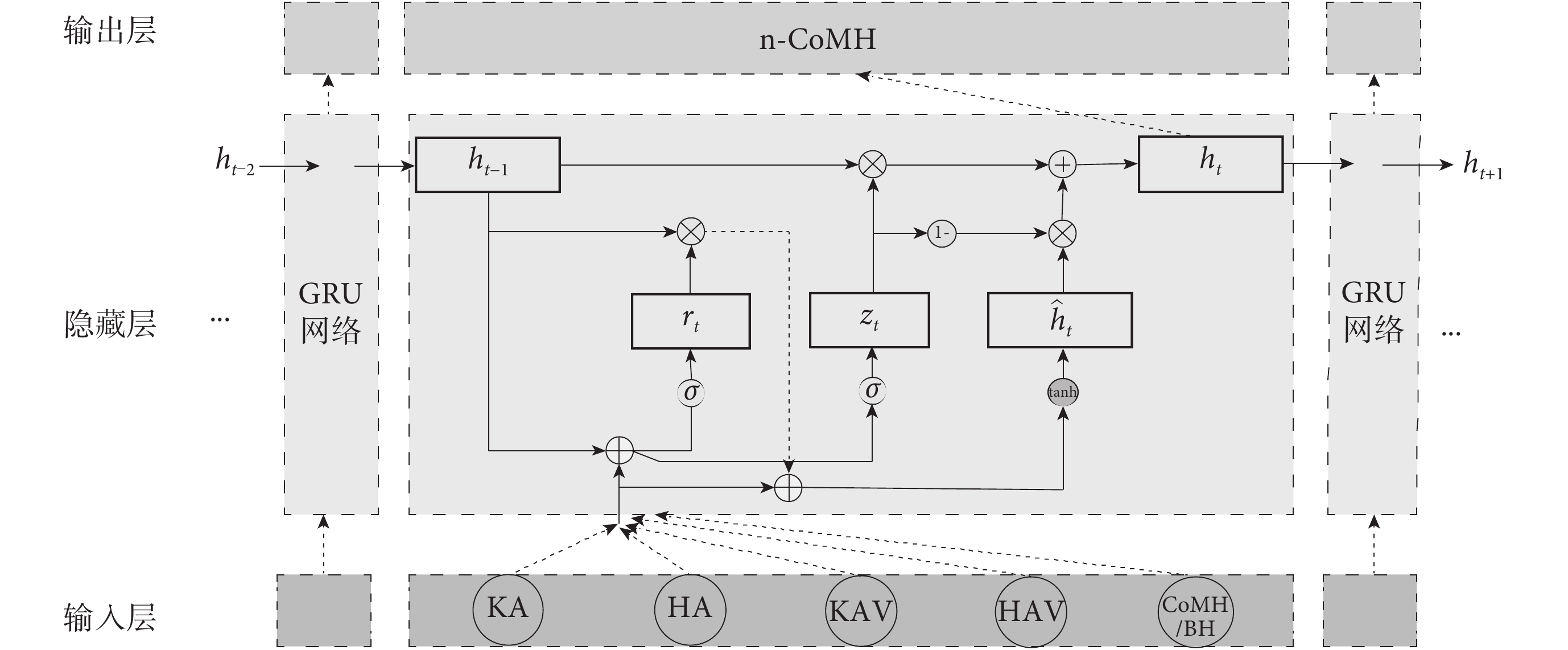 圖4
GRU神經網絡結構
Figure4.
Structure of GRU neural network
圖4
GRU神經網絡結構
Figure4.
Structure of GRU neural network
GRU網絡的狀態更新方式為
 |
其中,ht ? 1為上一時刻的外部狀態, 為向量元素乘積,
為向量元素乘積, 是通過非線性函數得到的候選狀態。在GRU中
是通過非線性函數得到的候選狀態。在GRU中
 |
在式(11)中,zt 表示更新門,用來控制當前狀態需要從歷史狀態中保留多少信息,以及需要從候選狀態中接受多少新信息,即
 |
在式(12)中, 為重置門,用來控制候選狀態
為重置門,用來控制候選狀態  的計算是否依賴上一時刻的狀態
的計算是否依賴上一時刻的狀態  ,即
,即
 |
其中,σ(*)為Logistic函數,其輸出區間為(0,1),xt為當前時刻的輸入, 、
、 、
、 、
、 均為權重向量,bz、br為偏置向量。
均為權重向量,bz、br為偏置向量。
2 試驗驗證
2.1 髖、膝關節角度計算驗證
試驗共召集了10名志愿者進行數據采集與測試。10名志愿者均無步態障礙、下肢損傷和神經系統疾病史,其中,男性5名,女性5名。10名志愿者的年齡為(22.7 ± 3.6)歲,身高為(171.4 ± 9.5)cm,體重為(65.6 ± 8.7)kg。所有受試者在試驗前均被告知整個試驗過程,且都簽署書面知情同意書。
使用Optical運動捕捉系統(Noraxon,美國)采集10名受試者在跑臺上行走時的步態數據以及CoMH,步態數據包括HA、KA、HAV、KAV。同時,IMU姿態采集模塊以相同的采樣率采集上述步態數據。采集系統在試驗過程中使用同步器以確保兩組數據在時間尺度上的一致性。每名受試者在跑步機上按照設定的3種不同的步速(2.0、2.5、3.0 km/h)行走,每組采樣時間為60 s,每兩組之間間隔60 s。
2.2 CoMH預測模型驗證
將BP神經網絡的輸入層神經元數量設置為5個,隱藏層神經元數量為10個,輸出層神經元數量為1個。同時將輸入層到隱藏層之間的激活函數設為“relu”,隱藏層與輸出層之間的激活函數設為“linear”。損失函數為均方誤差(mean-square-error,MSE)。最大迭代次數設置為1 000。GRU神經網絡的輸入層同樣也設置為5個神經元,隱藏層設置為200個神經元,激活函數為“tanh”。輸出層采用包含1個神經元的全連接神經網絡,激活函數設置為“relu”。同時將訓練輪數(epoch)設置為20次,每輪的批次(batch)的大小設置為150,學習率為0.01。通過對比試驗發現,訓練使用“Adam”優化器,損失函數定義為MSE的訓練效果較好,損失最小。
對2.1小節試驗中采集的10名受試者在跑臺上行走時的KA、HA、KAV、HAV及CoMH數據進行預處理后,按照1.2小節中的CoMH預測方法在PC端對神經網絡進行訓練。將 1.8 × 105 組訓練數據(10名志愿者 × 3種步速 × 100 Hz × 60 s)分別輸入到BP神經網絡和GRU網絡進行訓練。隨機選取70%作為訓練集,15%作為驗證集,15%作為測試集。對GRU網絡中的超參數,采用了試錯法[22]進行整定。神經網絡訓練和測試環境均采用MATLAB-2020a(MathWorks,美國)。
2.3 偏癱患者步態驗證
本研究納入了一位腦卒中后8個月并存在一側運動神經受損情況的受試者進行試驗。該患者男性,年齡64歲,身高168 cm,患肢為右側下肢。本試驗獲得了復旦大學附屬華山醫院倫理審查委員會審核通過,與受試者簽訂了試驗知情同意書。
使用Brunnstrom方法[23]評價該患者所處康復階段,該患者處于第四階段,即部分分離運動階段。在該階段,患者痙攣程度開始減輕,運動模式開始脫離連帶運動的控制,出現了部分分離運動的組合。該患者在試驗前被告知整個試驗過程,并全程在醫師的陪同下進行。
將訓練完成的神經網絡模型通過MATLAB-2020a自帶的MATLAB Coder工具移植到MCU中,配合IMU實現n-CoMH的實時預測。隨后MCU將n-CoMH逆歸一化后以ModBUS協議的格式發送至訓練設備的控制系統。控制系統將接收到的CoMH數據解析之后發送至電機驅動,實時調節骨盆支架高度,實現對患者CoMH的實時跟蹤。
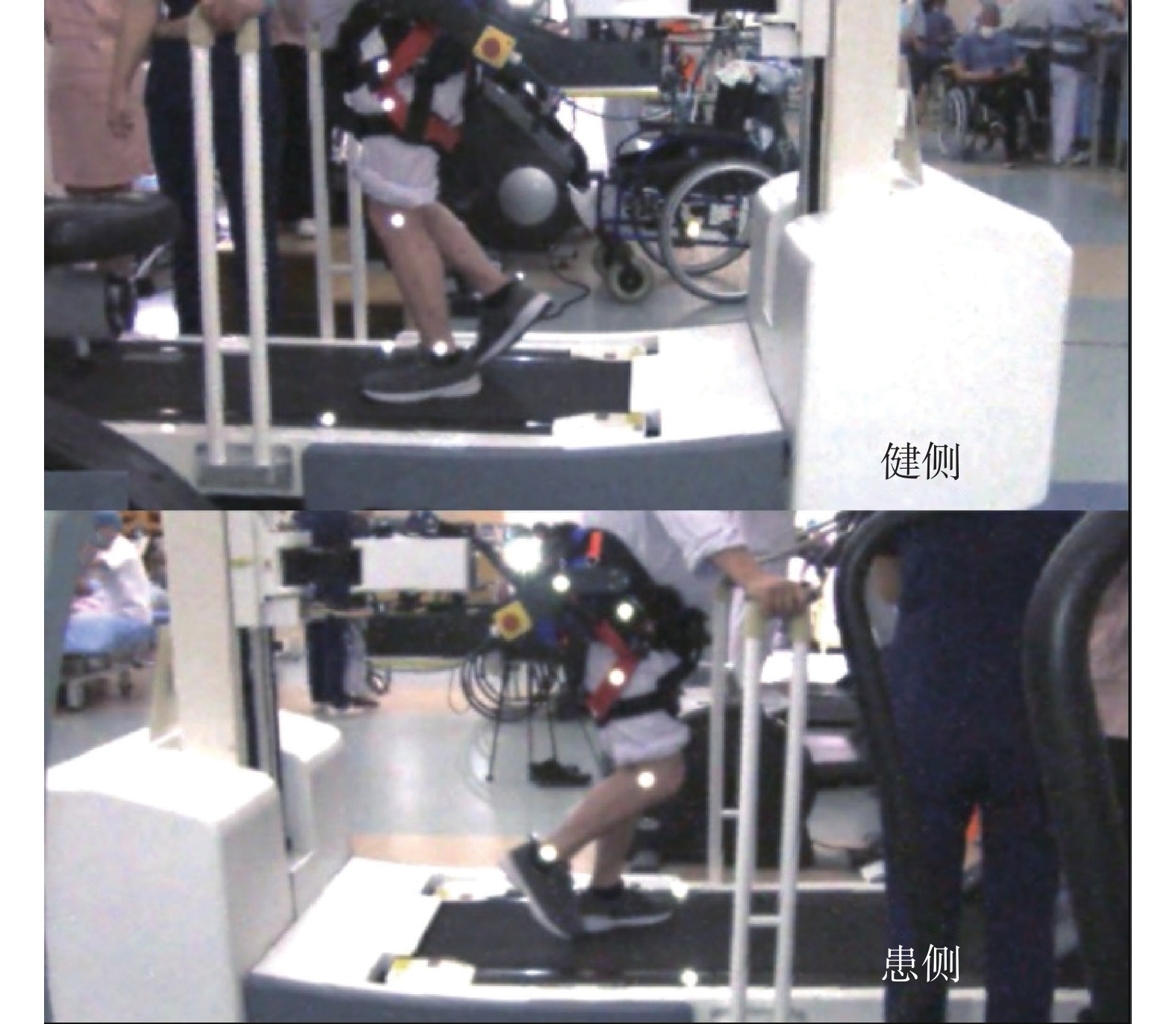
訓練試驗分為兩組,第一組BWS訓練系統采用常用于減重支撐訓練的體重百分比減重訓練模式,本次試驗設定減重百分比為40%,行走訓練速度為1.2 km/h,是該受試者近期訓練模式。第二組BWS訓練系統采用CoMH跟蹤模式(如圖5所示),行走訓練速度同樣為1.2 km/h,兩組訓練時間均為4 min。在兩種訓練模式下,均使用運動捕捉系統記錄患者標準運動步態數據以及CoMH。訓練使用的跑步機自帶足底壓力檢測,用于分析步行訓練時的步態相位變化。
 圖5
腦卒中患者使用CoMH跟蹤模式進行減重康復訓練試驗
Figure5.
Experiment on weight support rehabilitation training with CoMH tracking mode for stroke patient
圖5
腦卒中患者使用CoMH跟蹤模式進行減重康復訓練試驗
Figure5.
Experiment on weight support rehabilitation training with CoMH tracking mode for stroke patient
3 結果
3.1 髖、膝關節角度計算驗證結果
為評價IMU系統采集關節角度的性能,評價指標采用均方根誤差(root-mean-square error,RMSE),計算公式如下:
 |
式中, 為第i次測量時使用Optical運動捕捉系統記錄的角度值,
為第i次測量時使用Optical運動捕捉系統記錄的角度值, 為第i次測量時使用IMU系統采集并計算的角度值。
為第i次測量時使用IMU系統采集并計算的角度值。
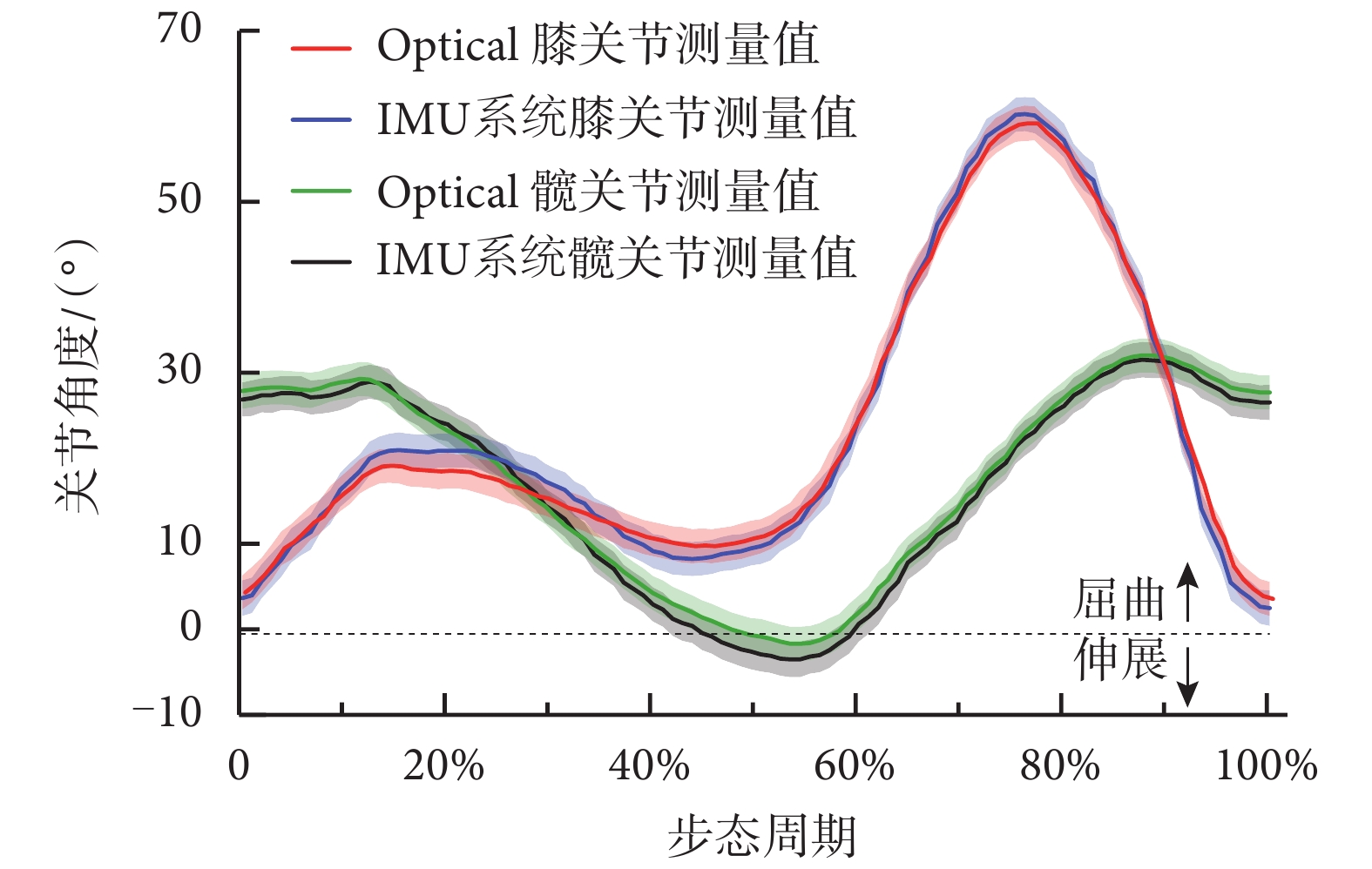
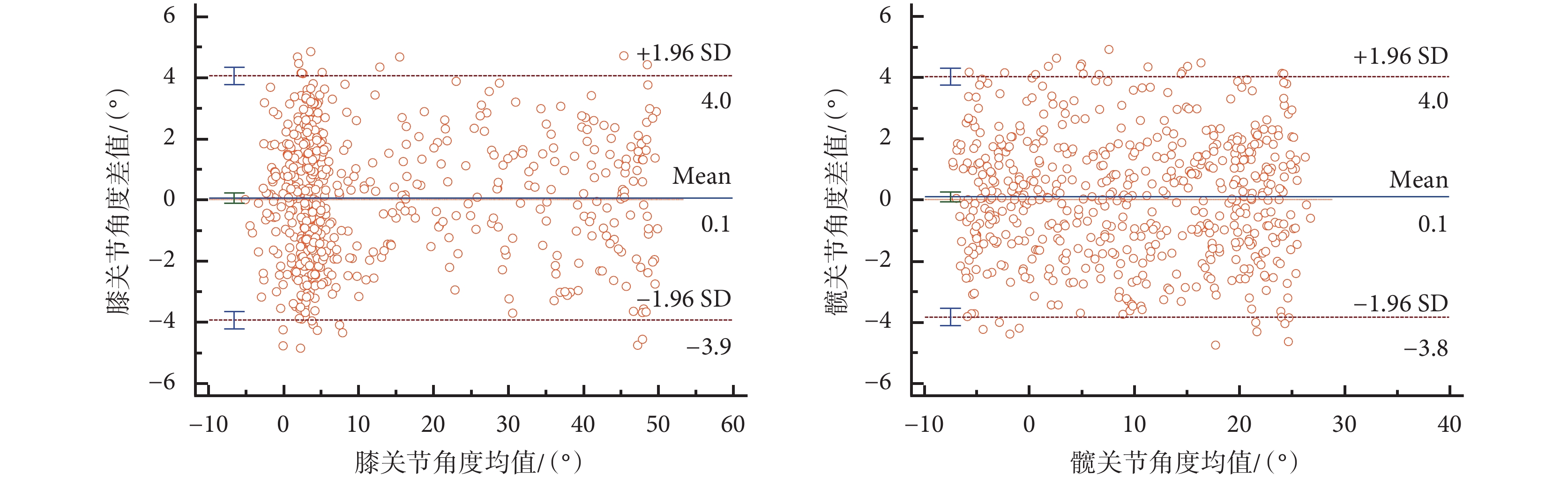
圖6截取了健康受試者在步速為2.0 km/h下一個步態周期內平均關節角度的變化。表1分別列出了10名受試者在三種不同步速下IMU系統測量關節角度的性能。截取健康受試者平穩行走過程中5個步態周期,分別對兩個測量系統采集的髖、膝關節角度值進行Bland-Altman一致性檢驗,結果如圖7所示。
 圖6
分別使用Optical系統與IMU姿態采集系統采集的正 常步速下髖、膝關節的角度
Figure6.
The angles of hip and knee joints at normal walking speed collected by Optical system and IMU attitude acquisition system respectively
圖6
分別使用Optical系統與IMU姿態采集系統采集的正 常步速下髖、膝關節的角度
Figure6.
The angles of hip and knee joints at normal walking speed collected by Optical system and IMU attitude acquisition system respectively
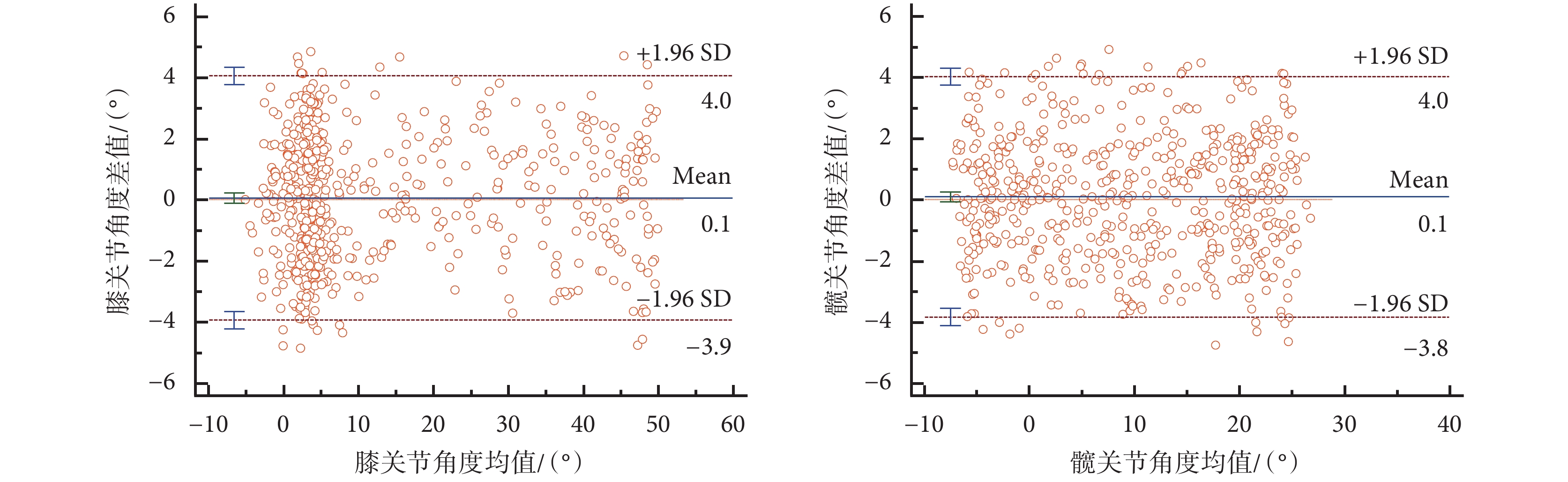 圖7
分別使用Optical系統與IMU姿態采集系統兩種方法測量角度的Bland-Altman圖
Figure7.
Bland-Altman diagram of angles measured by Optical system and IMU attitude acquisition system respectively
圖7
分別使用Optical系統與IMU姿態采集系統兩種方法測量角度的Bland-Altman圖
Figure7.
Bland-Altman diagram of angles measured by Optical system and IMU attitude acquisition system respectively
從圖6可以看出,IMU姿態采集系統對于髖、膝關節角度的測量基本與參考數據保持一致。從表1同時也可以得出,RMSE保持在1.091~2.993°之間,服從正態分布且相互獨立,使用單因素方差分析,不同步速之間RMSE的差異不具有統計學意義(P > 0.05)。在膝關節角度Bland-Altman一致性檢驗中(如圖7所示),有3.1%(18/580)的點在95%一致性界限以外,在髖關節角度Bland-Altman一致性檢驗中(如圖7所示),有4.8%(28/580)的點在95%一致性界限以外,兩者均處于可接受范圍之內。兩種系統測量髖、膝關節角度的一致性得到驗證。
3.2 CoMH計算驗證結果
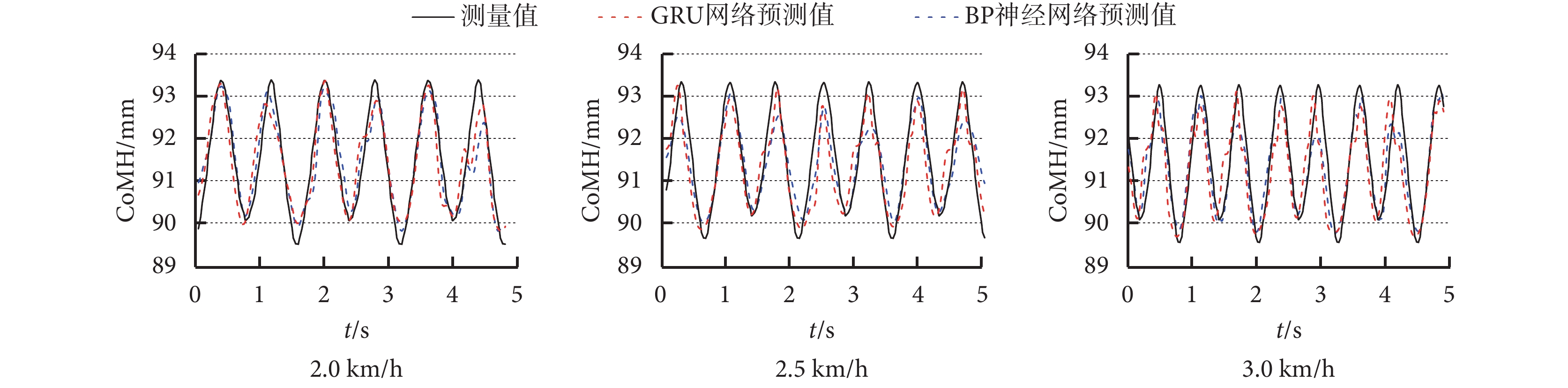
CoMH預測準確性驗證除了采用RMSE這一驗證指標之外,還采用了判定系數  進行驗證。圖8分別表示在步速為2.0、2.5、3.0 km/h下BP神經網絡和GRU神經網絡在不同步速下5 s內預測CoMH的情況。從圖中可看出,BP神經網絡和GRU網絡均可預測出CoMH的變化趨勢。表2為通過15%的測試集計算的
進行驗證。圖8分別表示在步速為2.0、2.5、3.0 km/h下BP神經網絡和GRU神經網絡在不同步速下5 s內預測CoMH的情況。從圖中可看出,BP神經網絡和GRU網絡均可預測出CoMH的變化趨勢。表2為通過15%的測試集計算的  和RMSE的值。BP神經網絡在不同步速下的
和RMSE的值。BP神經網絡在不同步速下的  為0.811~0.854,RMSE為1.717~1.835 mm。GRU網絡在不同步速下的
為0.811~0.854,RMSE為1.717~1.835 mm。GRU網絡在不同步速下的  均大于0.9,高于BP神經網絡,RMSE為1.408~1.662 mm,在不同的步速下均小于BP神經網絡。BP神經網絡的RMSE和
均大于0.9,高于BP神經網絡,RMSE為1.408~1.662 mm,在不同的步速下均小于BP神經網絡。BP神經網絡的RMSE和  均服從正態分布且相互獨立,分別對RMSE和
均服從正態分布且相互獨立,分別對RMSE和  使用單因素方差分析,兩種驗證指標在不同步速之間的差異無統計學意義(P > 0.05)。對GRU網絡進行相同的統計學分析,兩種驗證指標在不同步速之間的差異也無統計學意義(P > 0.05)。
使用單因素方差分析,兩種驗證指標在不同步速之間的差異無統計學意義(P > 0.05)。對GRU網絡進行相同的統計學分析,兩種驗證指標在不同步速之間的差異也無統計學意義(P > 0.05)。
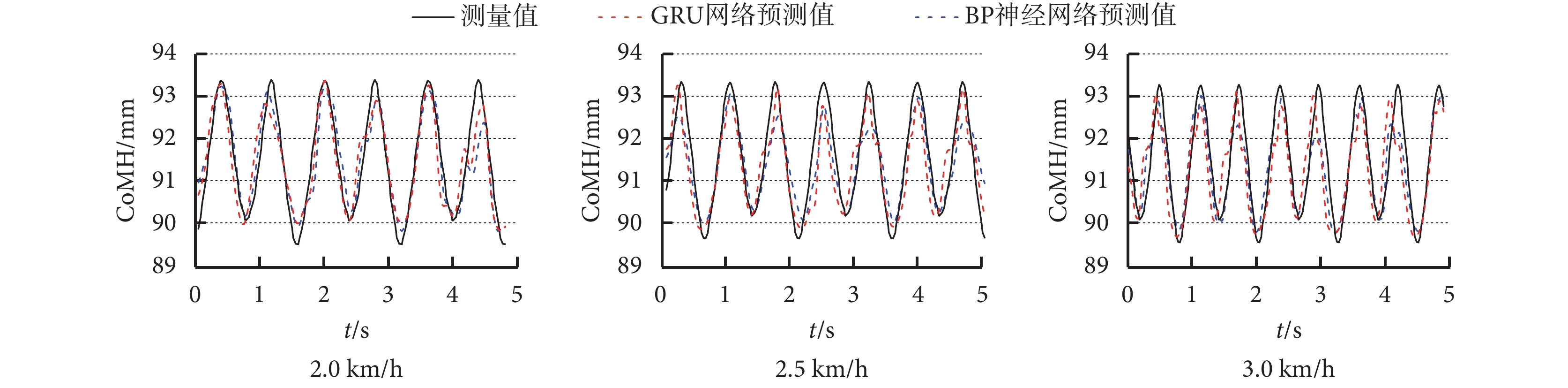 圖8
不同步速下CoMH測量值與兩種神經網絡模型預測值
Figure8.
Observed CoMH value and predicted CoMH value of two neural network models at different walking speeds
圖8
不同步速下CoMH測量值與兩種神經網絡模型預測值
Figure8.
Observed CoMH value and predicted CoMH value of two neural network models at different walking speeds
3.3 偏癱患者步態驗證結果
步態對稱是評價康復訓練效果的指標之一,為評價此次試驗訓練過程中患者的步態對稱性,本文采用文獻[24]中根據左、右側對稱性步態參數提出的三個對稱性指標,表達式如下:
 |
 |
 |
式中, 和
和  分別代表左右側肢體的步態特征參數。在本項研究中,
分別代表左右側肢體的步態特征參數。在本項研究中, 代表患側,
代表患側, 代表健側。其中SI = 0代表絕對對稱,
代表健側。其中SI = 0代表絕對對稱, = 1代表絕對對稱,
= 1代表絕對對稱, = 0代表絕對對稱。
= 0代表絕對對稱。
基于本文試驗的測試數據,步態特征參數為髖關節角度和膝關節角度。取偏癱患者試驗數據中較為穩定的10個連續的步態周期進行處理。使用均值插值法分別對10個步態周期擴展為數據點數相同的數據集,之后對10個數據集中相同序號數據點做平均處理,得到單個步態周期角度平均值。
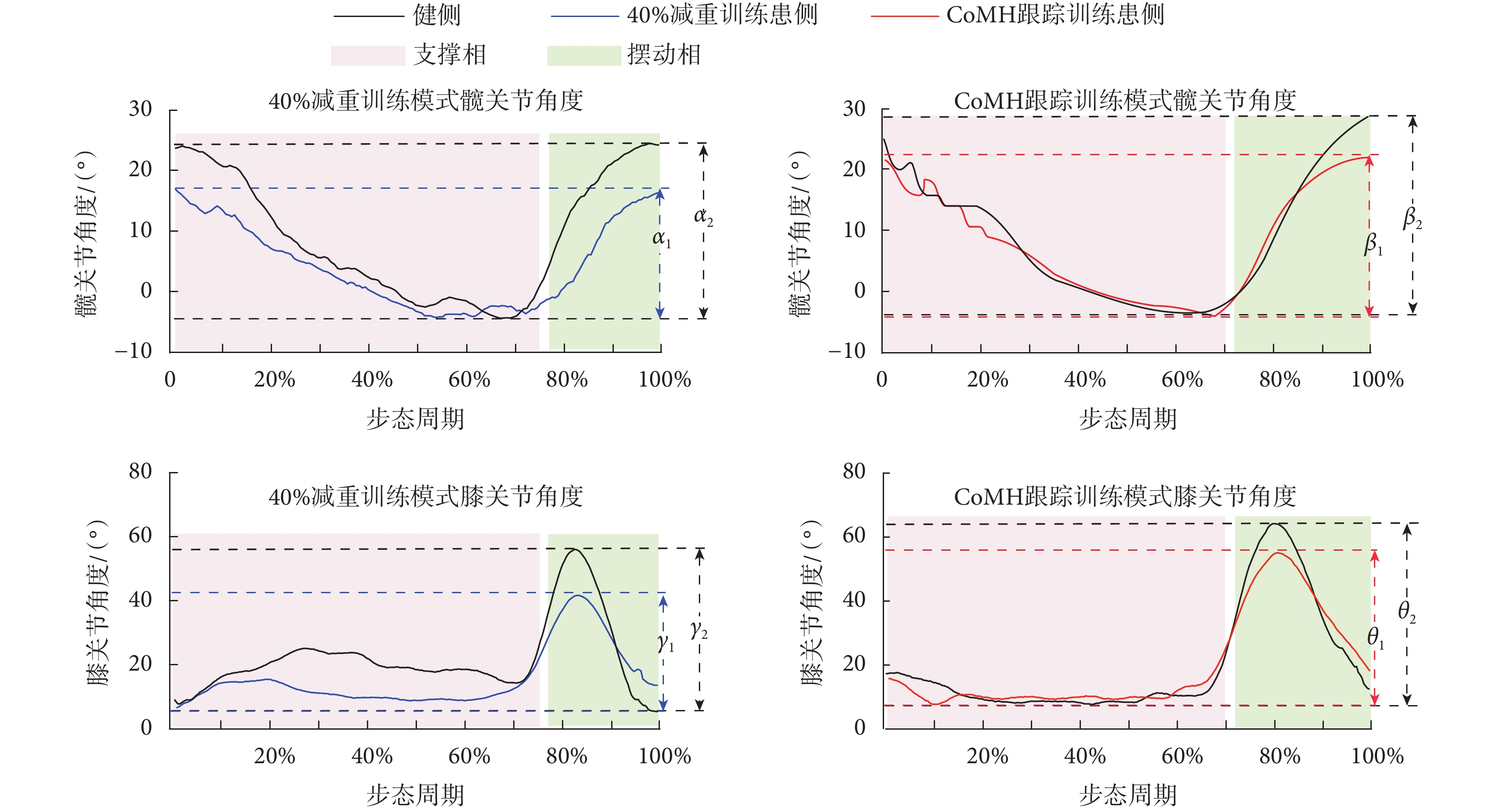
如圖9所示為40% 減重訓練模式以及CoMH跟蹤訓練模式下,受試者雙側髖、膝關節角度在單個周期角度平均值的變化曲線。在40% 減重訓練模式下,患側髖關節活動范圍  為21.2°,膝關節活動范圍
為21.2°,膝關節活動范圍  為36.6°;健側髖關節活動范圍
為36.6°;健側髖關節活動范圍  為 28.5°,膝關節活動范圍
為 28.5°,膝關節活動范圍  為 50.3°。在CoMH跟蹤訓練模式下,患側髖關節活動范圍
為 50.3°。在CoMH跟蹤訓練模式下,患側髖關節活動范圍  為 26.5°,相比40% 減重訓練模式增加25.0%,膝關節活動范圍
為 26.5°,相比40% 減重訓練模式增加25.0%,膝關節活動范圍  為 48.1°,相比40%減重訓練模式增加31.4%;健側髖關節活動范圍
為 48.1°,相比40%減重訓練模式增加31.4%;健側髖關節活動范圍  為32.1°,相比40%減重訓練模式增加12.6%,膝關節活動范圍
為32.1°,相比40%減重訓練模式增加12.6%,膝關節活動范圍  為56.3°,相比40% 減重訓練模式增加11.9%。
為56.3°,相比40% 減重訓練模式增加11.9%。
 圖9
兩種訓練模式下患者雙側髖、膝關節角度
Figure9.
Angle of bilateral hip and knee joint in two training modes
圖9
兩種訓練模式下患者雙側髖、膝關節角度
Figure9.
Angle of bilateral hip and knee joint in two training modes
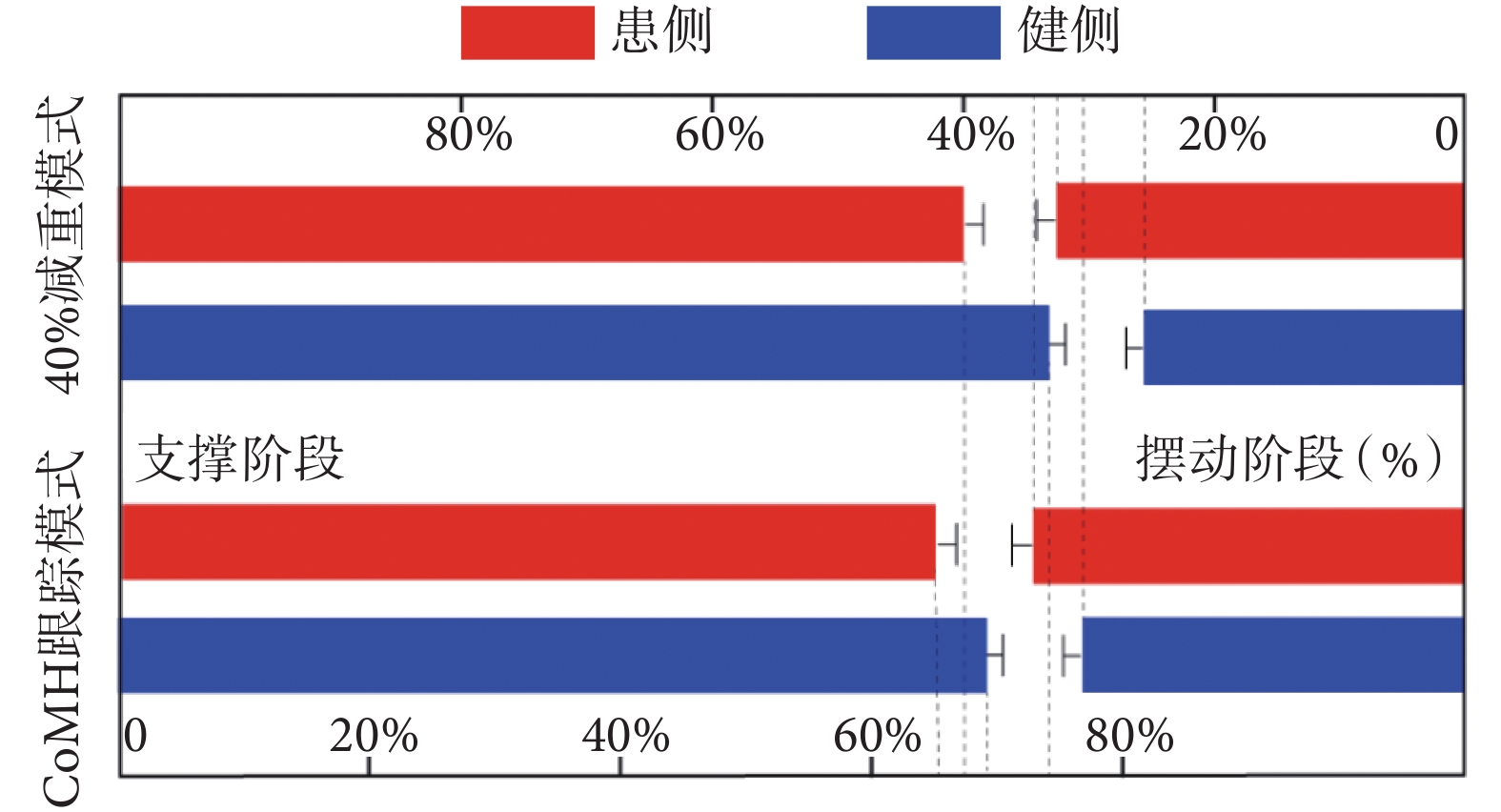
圖10為通過跑臺設備上的足底壓力采集板獲得患者在兩組訓練過程中的步態相位劃分情況。在40% 減重訓練模式下,患側的平均支撐階段占整個步態周期的(67.4 ± 1.5)%,擺動階段占整個步態周期的(32.6 ± 1.5)%;健側的平均支撐階段占整個步態周期的(74.2 ± 1.3)%,擺動階段占整個步態周期的(25.8 ± 1.3)%。與正常人相比,呈現出患側支撐階段縮短,雙側支撐階段延長,形成一種不對稱的步態。在CoMH跟蹤訓練模式下,患側的平均支撐階段占整個步態周期的(65.5 ± 1.5)%,擺動階段占整個步態周期的(34.5 ± 1.5)%;健側的平均支撐階段占整個步態周期的(69.3 ± 1.3)%,擺動階段占整個步態周期的(30.7 ± 1.3)%。與40% 減重訓練模式下相比,雙側支撐階段均有所延長,且趨近于相同,步態更為對稱。
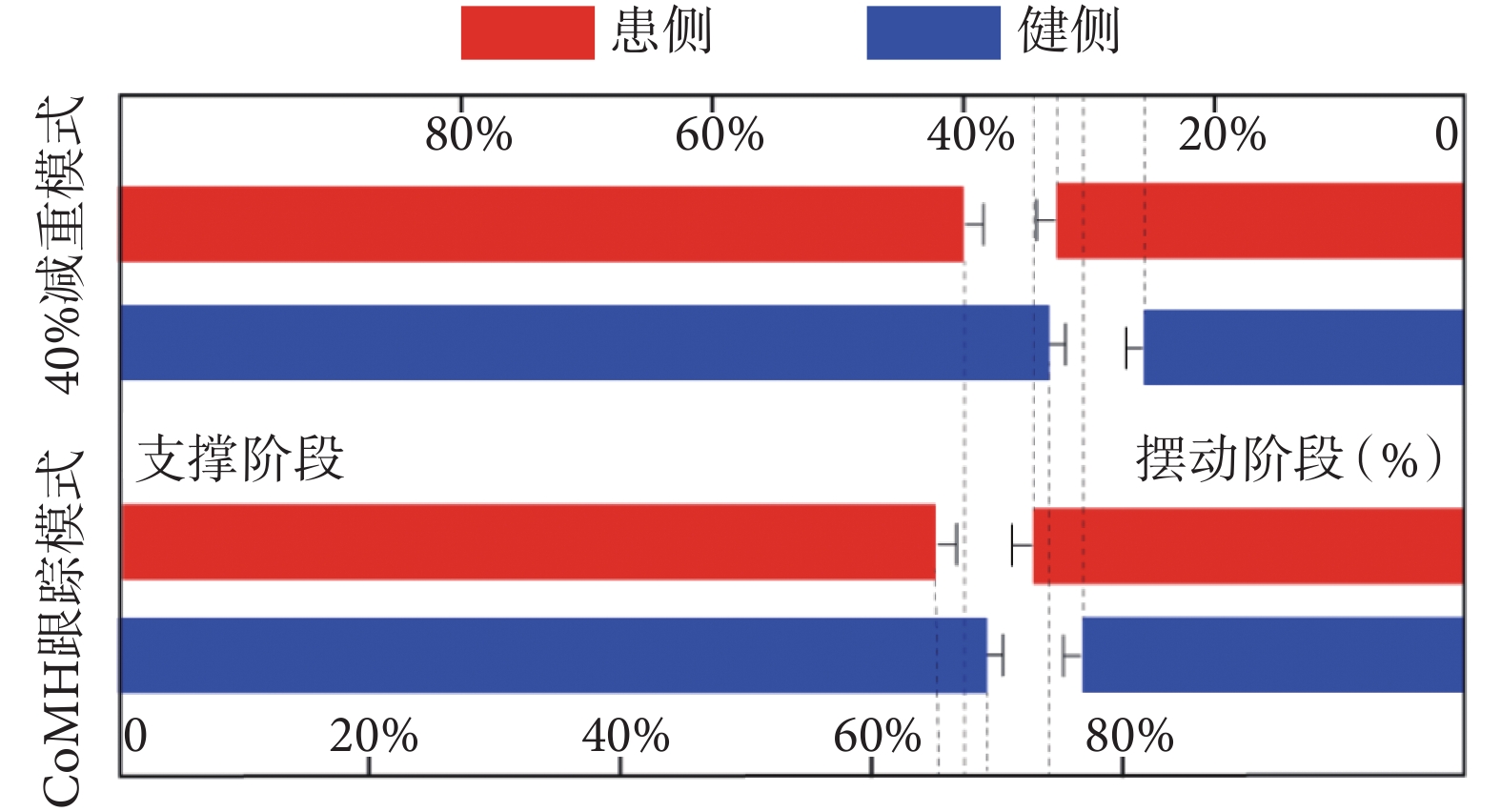 圖10
兩種訓練模式下患者雙側步態相位占比
Figure10.
The proportion of bilateral gait phase in two training modes
圖10
兩種訓練模式下患者雙側步態相位占比
Figure10.
The proportion of bilateral gait phase in two training modes
表3為在兩種不同訓練模式下雙腿膝關節與髖關節角度的對稱指數。在40% 減重訓練的模式下,雙側的髖、膝關節角度的SI絕對值均大于20%, 均大于1.5,
均大于1.5, 絕對值均大于2.0。在CoMH跟蹤訓練模式下,雙側髖、膝關節角度的SI絕對值均小于15%,
絕對值均大于2.0。在CoMH跟蹤訓練模式下,雙側髖、膝關節角度的SI絕對值均小于15%, 均小于1.5,更加接近于1,
均小于1.5,更加接近于1, 絕對值均小于2.0。相較于40% 減重訓練的模式,CoMH跟蹤訓練模式下雙側的髖、膝關節角度更加對稱。
絕對值均小于2.0。相較于40% 減重訓練的模式,CoMH跟蹤訓練模式下雙側的髖、膝關節角度更加對稱。
4 討論與結論
康復醫學的臨床研究表明,有患者運動意圖主動參與的康復訓練對于患者神經系統重建和運動功能恢復更加有效[25-26]。在Chua等[27]的研究中,BWS訓練系統可實時感知患者實際步行速度并以此調節訓練跑臺速度,達到速度跟隨控制訓練。該研究的數據表明,在速度跟隨訓練模式下,偏癱患者的行走能力、步態速度和整體平衡能力都有了顯著改善。在輔助行走機器人ReWalk[28]中,技術人員采用了九軸姿態傳感器檢測患者下肢關節運動,并以此計算患者的質心變化及步態特征。該機器人的動力輸出與使用者的步態保持一致,提高了康復訓練過程中患者的主動參與性,同時,患者訓練之后的最大步行速度有了明顯的提升。韓國研究團隊研制的懸吊減重康復系統Walkbot[29]可以根據患者的持續運動表現提供智能互動訓練,例如可自動調整適應痙攣或僵硬、輔助力和阻抗力、步速、髖/膝/踝關節的動力學和運動學,實現自主學習的功能。但其系統復雜龐大,傳感器數量多,價格昂貴。本研究與上述研究相似之處在于,通過采集患者運動狀態、識別患者運動意圖反饋調節下肢康復訓練設備的控制參數,進而提升下肢康復的訓練效果。不同之處在于,第一,本研究將人體重心高度識別首次應用到骨盆支撐減重康復系統中,探索了偏癱患者健側主動運動引導行走訓練的模式,并與傳統體重百分比減重訓練模式進行了訓練效果對比。第二,在CoMH預測方法方面,Esser等[30]的研究中將一個IMU放置在人體第四腰椎處,使用四元數旋轉矩陣方法,測量行走過程中CoM豎直方向加速度,通過積分計算豎直方向速度和CoMH。而本研究則是通過使用神經網絡搭建下肢運動學—人體重心高度映射模型,從而預測出更為準確的CoMH。
本文的試驗結果達到了預期目標。IMU姿態采集系統對于髖、膝關節角度的測量誤差均保持在可接受范圍之內,且不隨步速的變化而變化。預測值未與真實值完全吻合,可能是由于穿戴IMU傳感器的位置不固定以及傳感器的溫漂導致的數據誤差。BP神經網絡和GRU網絡均可對CoMH的變化趨勢作出預測,經比較GRU網絡預測的準確性高于BP神經網絡,判定系數  最高可達0.92,在今后的工作中可通過優化GRU網絡結構、擴大訓練數據集以進一步提高模型準確性。同時,本研究將會繼續召集更多的偏癱患者參與試驗,使數據更具統計學意義。
最高可達0.92,在今后的工作中可通過優化GRU網絡結構、擴大訓練數據集以進一步提高模型準確性。同時,本研究將會繼續召集更多的偏癱患者參與試驗,使數據更具統計學意義。
本文提出一種新型的骨盆支撐減重康復系統,在恒定阻抗減重的基礎上,增加了對人體CoMH的預測及跟蹤。患者患側髖、膝關節活動范圍分別提升25.0%和31.4%,患側擺動相與支撐相占比接近健側步態相位,支撐相患側、健側分別為65.5%、69.3%,擺動相患側、健側分別為34.5%、30.7%。本系統解決了骨盆支撐減重康復訓練過程中CoMH與骨盆支架高度不一致的問題,相比于傳統體重百分比減重訓練模式,CoMH跟蹤訓練模式可以通過偏癱患者健側的主動運動引導行走訓練,動態調整減重支撐的策略更有助于提高行走康復訓練效率。
重要聲明
利益沖突聲明:本文全體作者均聲明不存在利益沖突。
作者貢獻聲明:何秉澤設計研究方案,進行實驗,撰寫論文;石萍提供指導、監督、建議,修改論文;李新偉設計研究框架,修改論文;范萌負責數據收集、數據處理;鄧志鵬進行實驗、數據分析;喻洪流提出研究思路,提供指導、監督、建議。
倫理聲明:本研究通過了復旦大學附屬華山醫院倫理審查委員會的審批(批文編號:(2019)臨審第(017)號)。
引言
我國每年新發腦卒中患者約200萬人,其中約85%留有肢體運動功能障礙,70%以上患者通過早期步行訓練可恢復行走能力,但是對于偏癱等運動功能受損患者,要進行獨立行走訓練是非常困難的[1]。臨床數據表明,減重(body weight support,BWS)康復訓練系統可有效改善患者運動功能、下肢平衡功能及日常生活能力,提高患者的生活質量[2]。BWS康復步行訓練系統通過懸吊或者支撐裝置減少患者的下肢負荷,使患者在支撐能力不足的情況下也能以良好的步行姿態進行正常的步行訓練。同時,患者在醫用跑臺的帶動下邁步,能夠激活運動皮質和脊髓節律性運動中樞,從而加強患者的下肢肌群肌力,增強下肢髖關節、膝關節和踝關節的穩定性,提高患者步行運動時各關節、肌群及神經支配的協調性,最終幫助患者改善或者恢復下肢運動和行走能力[3-7]。此外,減重裝置能夠為患者提供安全感,消除患者在步行訓練時的緊張感和恐懼[8-10]。
行走可以被定義為一系列失去和恢復平衡的過程,在這一系列過程中,人體質量中心(center of mass,CoM)位置是在不斷發生變化的。在BWS步行康復訓練系統研究和設計過程中,受試者CoM在垂直方向的位移即重心高度(center of mass height,CoMH)值得特別關注[11]。目前,市場上已投入使用的BWS康復訓練系統可以分為被動型系統和主動型系統兩大類。被動型的BWS康復系統又包括靜平衡系統、被動配重系統和被動彈性力減重系統[12]。這類被動型減重康復系統具有結構簡單、操作方便等優點,但沒有額外的動力輸入,且在康復訓練過程中不能實時調節配重。患者在步行訓練時,由于在垂直方向上存在向上或者向下的加速度,減重系統提供的減重力會隨著CoMH的變化而變化[13],使患者在訓練過程中有失重和超重的起伏感,從而導致訓練效果不佳[11]。
主動型系統一般由力傳感器、控制器和執行器組成。該類型減重康復訓練系統通過力傳感器實時比較減重力的真實值和預設值,由執行機構提供額外的動力輸入,進而實現減重力的閉環控制。常見的幾種動力驅動方式有:電力驅動、氣壓驅動和液壓驅動。Rifton設備公司的Pacer步態訓練器采用高度可調節的鞍座來輔助步態訓練[14],并使用氣動推桿來提供動力。上海理工大學設計研發的壓差式氣動減重康復步行訓練系統[15],通過空氣壓差技術進行減重,以輔助患者站立和行走。加拿大卡爾頓大學設計的GaitEnable[16]、新加坡國立大學設計的Robotic Walker[17]以及美國伊利諾伊大學設計的KineAssist[18]通過使用電力驅動的線性執行機構和骨盆支架為患者提供主動BWS和部分被動骨盆運動。Gordon等[19]發明了一種液壓驅動的BWS康復系統,同樣也是基于力閉環控制以達到主動BWS的目的。上述BWS康復訓練系統消除了配重塊或彈性器件的慣性沖擊,可以顯著提高減重力的控制精度,且可以在不停止設備的情況下無縫地調整減重力。但上述幾種下肢康復訓練減重支撐系統均存在一些缺點,如在使用過程中,骨盆支架在豎直方向的運動軌跡是固定的,患者微小的步速或步幅的變化就會導致骨盆支架高度與患者的CoMH不一致,使患者一直處于被動地適應康復設備的訓練狀態,進而影響康復訓練的效果[20]。
因此,本文目的是在現有BWS康復訓練系統研究的基礎上,設計一種CoMH跟隨的主動式BWS康復訓練系統,建立基于慣性測量單元(inertial measurement unit,IMU)預測人體CoMH的模型。基于該模型的BWS康復訓練系統的骨盆支架可以在患者切換不同步速和步幅的情況下準確快速地調整至與CoMH相對應的高度,從而實現由偏癱患者健側主動運動引導行走訓練。此外,本研究還對比了兩種不同的神經網絡——誤差反向傳播(error back propagation training,BP)神經網絡和門控循環單元(gated recurrent unit,GRU)網絡對預測模型精度的影響。
1 系統設計
1.1 系統結構
BWS康復訓練系統結構如圖1所示。該系統由步態減重訓練設備和CoMH預測設備組成。步態減重訓練設備主要包括跑臺機構、立柱機構、骨盆支架(機構)、減重束帶、軀干束帶、控制箱和交互顯示屏。CoMH預測設備由三個IMU姿態采集模塊和一個數據接收模塊組成。每個IMU姿態采集模塊的大小為35 mm×50 mm×15 mm,其內部包含一個LPMS-ME1 IMU傳感器、一個電池(3.7 V,80 mAh)和一個藍牙模塊。IMU傳感器整合了三軸加速度計(?16~16 g)、三軸陀螺儀(?2 000~2 000 dps)和三軸磁力計等傳感器(?16~16 Gauss)。數據采集系統包含一個微處理器(MCU,STM32F407ZE)以及與三個IMU姿態采集模塊配對的藍牙模塊。
圖1
具有CoMH跟隨的主動式BWS康復訓練系統結構
Figure1.
Structure of active BWS rehabilitation training system with CoMH tracing
三個IMU采集模塊分別以100 Hz的采樣率采集受試者小腿和大腿的位置信號并通過藍牙發送到數據接收系統。MCU處理信號并計算CoMH,通過UART將CoMH以ModBUS協議的格式發送至訓練設備的控制系統。控制系統將接收到的CoMH數據解析之后發送至電機驅動,實時調節骨盆支架高度,實現對患者CoMH的實時跟蹤。
1.2 CoMH跟蹤方法
1.2.1 髖、膝關節運動角度計算方法
由于IMU在測量各關節歐拉角時會出現萬向節鎖的情況,導致CoMH計算錯誤,故而采用四元數對各關節角度進行解算。如圖2所示,全局坐標系 定義為:X軸指向側面,Y軸向前,Z軸向上。假設最初股骨參考坐標系 和小腿參考坐標系 與全局坐標系重合,因此能夠確定旋轉矩陣 和 ,其中 R 表示旋轉矩陣;上標 i 表示初始位置;下標G、H和F分別表示全局參考坐標系、股骨參考坐標系和小腿參考坐標系。
圖2
人體下肢全局參考坐標系以及各關節局部參考坐標系
Figure2.
Global reference coordinate system and local reference coordinate system
大腿坐標系相對于第一個IMU坐標系和小腿坐標系相對于第二個IMU坐標系的取向分別表示如下:
|
其中,下標U表示佩戴在大腿上的第一IMU坐標系,下標L表示佩戴在小腿上的第二IMU坐標系。
當受試者下肢移動到新的姿勢時,全局坐標系中的大腿和小腿的姿態可以由以下旋轉矩陣描述:
|
其中,上標 f 表示下一時刻的動作,上標 i 表示初始時刻動作。
從大腿處的IMU獲得四元數 ,其中(x, y, z)是向量,w是標量。
|
股骨旋轉矩陣在全局坐標系中表示如下:
|
股骨與脛骨之間的相對歐拉角 、、,它們分別為回轉角、俯仰角和偏轉角,可以寫成如下形式:
|
其中,、 分別是 、 的簡寫,其余同理。
從上面的式子可以計算3個髖關節角度:
|
|
|
其中, 代表髖關節屈曲/伸展, 代表髖關節內收/外展, 代表髖關節內/外旋轉。
1.2.2 CoMH預測方法
本文分別采用BP神經網絡和GRU網絡對CoMH進行預測。對于不同的受試者,其CoMH與身高等因素相關,因此本研究將每名受試者直立靜止時的CoMH與身高的比值(CoMH/BH)做為一項特征參數,同時將受試者在試驗過程中采集到的CoMH對身高做歸一化處理,得到歸一化重心高度(n-CoMH),最終形成具有6個特征的訓練數據。輸入特征為髖關節屈曲角度(hip angle,HA)、膝關節屈曲角度(knee angle,KA)、髖關節角速度(hip angle velocity,HAV)、膝關節角速度(knee angle velocity,KAV)以及CoMH/BH,輸出特征為n-CoMH。
基于BP神經網絡的預測模型由一個輸入層、一個隱藏層和一個輸出層組成,如圖3所示。
圖3
BP神經網絡結構
Figure3.
Structure of BP neural network
GRU網絡[21]是循環神經網絡(recurrent neural network,RNN)的一種變體,因其可以有效解決簡單RNN的梯度爆炸或消失的問題,被廣泛應用于各領域。該類神經網絡具有短期記憶能力,其神經元不但可以接受其他神經元的信息,也可以接受自身的信息,形成具有環路的網絡結構,因此對于預測CoMH這類的時間序列具有較高的預測精度。本文使用的GRU網絡結構如圖4所示。
圖4
GRU神經網絡結構
Figure4.
Structure of GRU neural network
GRU網絡的狀態更新方式為
|
其中,ht ? 1為上一時刻的外部狀態,為向量元素乘積, 是通過非線性函數得到的候選狀態。在GRU中
|
在式(11)中,zt 表示更新門,用來控制當前狀態需要從歷史狀態中保留多少信息,以及需要從候選狀態中接受多少新信息,即
|
在式(12)中, 為重置門,用來控制候選狀態 的計算是否依賴上一時刻的狀態 ,即
|
其中,σ(*)為Logistic函數,其輸出區間為(0,1),xt為當前時刻的輸入,、、、 均為權重向量,bz、br為偏置向量。
2 試驗驗證
2.1 髖、膝關節角度計算驗證
試驗共召集了10名志愿者進行數據采集與測試。10名志愿者均無步態障礙、下肢損傷和神經系統疾病史,其中,男性5名,女性5名。10名志愿者的年齡為(22.7 ± 3.6)歲,身高為(171.4 ± 9.5)cm,體重為(65.6 ± 8.7)kg。所有受試者在試驗前均被告知整個試驗過程,且都簽署書面知情同意書。
使用Optical運動捕捉系統(Noraxon,美國)采集10名受試者在跑臺上行走時的步態數據以及CoMH,步態數據包括HA、KA、HAV、KAV。同時,IMU姿態采集模塊以相同的采樣率采集上述步態數據。采集系統在試驗過程中使用同步器以確保兩組數據在時間尺度上的一致性。每名受試者在跑步機上按照設定的3種不同的步速(2.0、2.5、3.0 km/h)行走,每組采樣時間為60 s,每兩組之間間隔60 s。
2.2 CoMH預測模型驗證
將BP神經網絡的輸入層神經元數量設置為5個,隱藏層神經元數量為10個,輸出層神經元數量為1個。同時將輸入層到隱藏層之間的激活函數設為“relu”,隱藏層與輸出層之間的激活函數設為“linear”。損失函數為均方誤差(mean-square-error,MSE)。最大迭代次數設置為1 000。GRU神經網絡的輸入層同樣也設置為5個神經元,隱藏層設置為200個神經元,激活函數為“tanh”。輸出層采用包含1個神經元的全連接神經網絡,激活函數設置為“relu”。同時將訓練輪數(epoch)設置為20次,每輪的批次(batch)的大小設置為150,學習率為0.01。通過對比試驗發現,訓練使用“Adam”優化器,損失函數定義為MSE的訓練效果較好,損失最小。
對2.1小節試驗中采集的10名受試者在跑臺上行走時的KA、HA、KAV、HAV及CoMH數據進行預處理后,按照1.2小節中的CoMH預測方法在PC端對神經網絡進行訓練。將 1.8 × 105 組訓練數據(10名志愿者 × 3種步速 × 100 Hz × 60 s)分別輸入到BP神經網絡和GRU網絡進行訓練。隨機選取70%作為訓練集,15%作為驗證集,15%作為測試集。對GRU網絡中的超參數,采用了試錯法[22]進行整定。神經網絡訓練和測試環境均采用MATLAB-2020a(MathWorks,美國)。
2.3 偏癱患者步態驗證
本研究納入了一位腦卒中后8個月并存在一側運動神經受損情況的受試者進行試驗。該患者男性,年齡64歲,身高168 cm,患肢為右側下肢。本試驗獲得了復旦大學附屬華山醫院倫理審查委員會審核通過,與受試者簽訂了試驗知情同意書。
使用Brunnstrom方法[23]評價該患者所處康復階段,該患者處于第四階段,即部分分離運動階段。在該階段,患者痙攣程度開始減輕,運動模式開始脫離連帶運動的控制,出現了部分分離運動的組合。該患者在試驗前被告知整個試驗過程,并全程在醫師的陪同下進行。
將訓練完成的神經網絡模型通過MATLAB-2020a自帶的MATLAB Coder工具移植到MCU中,配合IMU實現n-CoMH的實時預測。隨后MCU將n-CoMH逆歸一化后以ModBUS協議的格式發送至訓練設備的控制系統。控制系統將接收到的CoMH數據解析之后發送至電機驅動,實時調節骨盆支架高度,實現對患者CoMH的實時跟蹤。
訓練試驗分為兩組,第一組BWS訓練系統采用常用于減重支撐訓練的體重百分比減重訓練模式,本次試驗設定減重百分比為40%,行走訓練速度為1.2 km/h,是該受試者近期訓練模式。第二組BWS訓練系統采用CoMH跟蹤模式(如圖5所示),行走訓練速度同樣為1.2 km/h,兩組訓練時間均為4 min。在兩種訓練模式下,均使用運動捕捉系統記錄患者標準運動步態數據以及CoMH。訓練使用的跑步機自帶足底壓力檢測,用于分析步行訓練時的步態相位變化。
圖5
腦卒中患者使用CoMH跟蹤模式進行減重康復訓練試驗
Figure5.
Experiment on weight support rehabilitation training with CoMH tracking mode for stroke patient
3 結果
3.1 髖、膝關節角度計算驗證結果
為評價IMU系統采集關節角度的性能,評價指標采用均方根誤差(root-mean-square error,RMSE),計算公式如下:
|
式中, 為第i次測量時使用Optical運動捕捉系統記錄的角度值, 為第i次測量時使用IMU系統采集并計算的角度值。
圖6截取了健康受試者在步速為2.0 km/h下一個步態周期內平均關節角度的變化。表1分別列出了10名受試者在三種不同步速下IMU系統測量關節角度的性能。截取健康受試者平穩行走過程中5個步態周期,分別對兩個測量系統采集的髖、膝關節角度值進行Bland-Altman一致性檢驗,結果如圖7所示。
圖6
分別使用Optical系統與IMU姿態采集系統采集的正 常步速下髖、膝關節的角度
Figure6.
The angles of hip and knee joints at normal walking speed collected by Optical system and IMU attitude acquisition system respectively
圖7
分別使用Optical系統與IMU姿態采集系統兩種方法測量角度的Bland-Altman圖
Figure7.
Bland-Altman diagram of angles measured by Optical system and IMU attitude acquisition system respectively
從圖6可以看出,IMU姿態采集系統對于髖、膝關節角度的測量基本與參考數據保持一致。從表1同時也可以得出,RMSE保持在1.091~2.993°之間,服從正態分布且相互獨立,使用單因素方差分析,不同步速之間RMSE的差異不具有統計學意義(P > 0.05)。在膝關節角度Bland-Altman一致性檢驗中(如圖7所示),有3.1%(18/580)的點在95%一致性界限以外,在髖關節角度Bland-Altman一致性檢驗中(如圖7所示),有4.8%(28/580)的點在95%一致性界限以外,兩者均處于可接受范圍之內。兩種系統測量髖、膝關節角度的一致性得到驗證。
3.2 CoMH計算驗證結果
CoMH預測準確性驗證除了采用RMSE這一驗證指標之外,還采用了判定系數 進行驗證。圖8分別表示在步速為2.0、2.5、3.0 km/h下BP神經網絡和GRU神經網絡在不同步速下5 s內預測CoMH的情況。從圖中可看出,BP神經網絡和GRU網絡均可預測出CoMH的變化趨勢。表2為通過15%的測試集計算的 和RMSE的值。BP神經網絡在不同步速下的 為0.811~0.854,RMSE為1.717~1.835 mm。GRU網絡在不同步速下的 均大于0.9,高于BP神經網絡,RMSE為1.408~1.662 mm,在不同的步速下均小于BP神經網絡。BP神經網絡的RMSE和 均服從正態分布且相互獨立,分別對RMSE和 使用單因素方差分析,兩種驗證指標在不同步速之間的差異無統計學意義(P > 0.05)。對GRU網絡進行相同的統計學分析,兩種驗證指標在不同步速之間的差異也無統計學意義(P > 0.05)。
圖8
不同步速下CoMH測量值與兩種神經網絡模型預測值
Figure8.
Observed CoMH value and predicted CoMH value of two neural network models at different walking speeds
3.3 偏癱患者步態驗證結果
步態對稱是評價康復訓練效果的指標之一,為評價此次試驗訓練過程中患者的步態對稱性,本文采用文獻[24]中根據左、右側對稱性步態參數提出的三個對稱性指標,表達式如下:
|
|
|
式中, 和 分別代表左右側肢體的步態特征參數。在本項研究中, 代表患側, 代表健側。其中SI = 0代表絕對對稱, = 1代表絕對對稱, = 0代表絕對對稱。
基于本文試驗的測試數據,步態特征參數為髖關節角度和膝關節角度。取偏癱患者試驗數據中較為穩定的10個連續的步態周期進行處理。使用均值插值法分別對10個步態周期擴展為數據點數相同的數據集,之后對10個數據集中相同序號數據點做平均處理,得到單個步態周期角度平均值。
如圖9所示為40% 減重訓練模式以及CoMH跟蹤訓練模式下,受試者雙側髖、膝關節角度在單個周期角度平均值的變化曲線。在40% 減重訓練模式下,患側髖關節活動范圍 為21.2°,膝關節活動范圍 為36.6°;健側髖關節活動范圍 為 28.5°,膝關節活動范圍 為 50.3°。在CoMH跟蹤訓練模式下,患側髖關節活動范圍 為 26.5°,相比40% 減重訓練模式增加25.0%,膝關節活動范圍 為 48.1°,相比40%減重訓練模式增加31.4%;健側髖關節活動范圍 為32.1°,相比40%減重訓練模式增加12.6%,膝關節活動范圍 為56.3°,相比40% 減重訓練模式增加11.9%。
圖9
兩種訓練模式下患者雙側髖、膝關節角度
Figure9.
Angle of bilateral hip and knee joint in two training modes
圖10為通過跑臺設備上的足底壓力采集板獲得患者在兩組訓練過程中的步態相位劃分情況。在40% 減重訓練模式下,患側的平均支撐階段占整個步態周期的(67.4 ± 1.5)%,擺動階段占整個步態周期的(32.6 ± 1.5)%;健側的平均支撐階段占整個步態周期的(74.2 ± 1.3)%,擺動階段占整個步態周期的(25.8 ± 1.3)%。與正常人相比,呈現出患側支撐階段縮短,雙側支撐階段延長,形成一種不對稱的步態。在CoMH跟蹤訓練模式下,患側的平均支撐階段占整個步態周期的(65.5 ± 1.5)%,擺動階段占整個步態周期的(34.5 ± 1.5)%;健側的平均支撐階段占整個步態周期的(69.3 ± 1.3)%,擺動階段占整個步態周期的(30.7 ± 1.3)%。與40% 減重訓練模式下相比,雙側支撐階段均有所延長,且趨近于相同,步態更為對稱。
圖10
兩種訓練模式下患者雙側步態相位占比
Figure10.
The proportion of bilateral gait phase in two training modes
表3為在兩種不同訓練模式下雙腿膝關節與髖關節角度的對稱指數。在40% 減重訓練的模式下,雙側的髖、膝關節角度的SI絕對值均大于20%, 均大于1.5, 絕對值均大于2.0。在CoMH跟蹤訓練模式下,雙側髖、膝關節角度的SI絕對值均小于15%, 均小于1.5,更加接近于1, 絕對值均小于2.0。相較于40% 減重訓練的模式,CoMH跟蹤訓練模式下雙側的髖、膝關節角度更加對稱。
4 討論與結論
康復醫學的臨床研究表明,有患者運動意圖主動參與的康復訓練對于患者神經系統重建和運動功能恢復更加有效[25-26]。在Chua等[27]的研究中,BWS訓練系統可實時感知患者實際步行速度并以此調節訓練跑臺速度,達到速度跟隨控制訓練。該研究的數據表明,在速度跟隨訓練模式下,偏癱患者的行走能力、步態速度和整體平衡能力都有了顯著改善。在輔助行走機器人ReWalk[28]中,技術人員采用了九軸姿態傳感器檢測患者下肢關節運動,并以此計算患者的質心變化及步態特征。該機器人的動力輸出與使用者的步態保持一致,提高了康復訓練過程中患者的主動參與性,同時,患者訓練之后的最大步行速度有了明顯的提升。韓國研究團隊研制的懸吊減重康復系統Walkbot[29]可以根據患者的持續運動表現提供智能互動訓練,例如可自動調整適應痙攣或僵硬、輔助力和阻抗力、步速、髖/膝/踝關節的動力學和運動學,實現自主學習的功能。但其系統復雜龐大,傳感器數量多,價格昂貴。本研究與上述研究相似之處在于,通過采集患者運動狀態、識別患者運動意圖反饋調節下肢康復訓練設備的控制參數,進而提升下肢康復的訓練效果。不同之處在于,第一,本研究將人體重心高度識別首次應用到骨盆支撐減重康復系統中,探索了偏癱患者健側主動運動引導行走訓練的模式,并與傳統體重百分比減重訓練模式進行了訓練效果對比。第二,在CoMH預測方法方面,Esser等[30]的研究中將一個IMU放置在人體第四腰椎處,使用四元數旋轉矩陣方法,測量行走過程中CoM豎直方向加速度,通過積分計算豎直方向速度和CoMH。而本研究則是通過使用神經網絡搭建下肢運動學—人體重心高度映射模型,從而預測出更為準確的CoMH。
本文的試驗結果達到了預期目標。IMU姿態采集系統對于髖、膝關節角度的測量誤差均保持在可接受范圍之內,且不隨步速的變化而變化。預測值未與真實值完全吻合,可能是由于穿戴IMU傳感器的位置不固定以及傳感器的溫漂導致的數據誤差。BP神經網絡和GRU網絡均可對CoMH的變化趨勢作出預測,經比較GRU網絡預測的準確性高于BP神經網絡,判定系數 最高可達0.92,在今后的工作中可通過優化GRU網絡結構、擴大訓練數據集以進一步提高模型準確性。同時,本研究將會繼續召集更多的偏癱患者參與試驗,使數據更具統計學意義。
本文提出一種新型的骨盆支撐減重康復系統,在恒定阻抗減重的基礎上,增加了對人體CoMH的預測及跟蹤。患者患側髖、膝關節活動范圍分別提升25.0%和31.4%,患側擺動相與支撐相占比接近健側步態相位,支撐相患側、健側分別為65.5%、69.3%,擺動相患側、健側分別為34.5%、30.7%。本系統解決了骨盆支撐減重康復訓練過程中CoMH與骨盆支架高度不一致的問題,相比于傳統體重百分比減重訓練模式,CoMH跟蹤訓練模式可以通過偏癱患者健側的主動運動引導行走訓練,動態調整減重支撐的策略更有助于提高行走康復訓練效率。
重要聲明
利益沖突聲明:本文全體作者均聲明不存在利益沖突。
作者貢獻聲明:何秉澤設計研究方案,進行實驗,撰寫論文;石萍提供指導、監督、建議,修改論文;李新偉設計研究框架,修改論文;范萌負責數據收集、數據處理;鄧志鵬進行實驗、數據分析;喻洪流提出研究思路,提供指導、監督、建議。
倫理聲明:本研究通過了復旦大學附屬華山醫院倫理審查委員會的審批(批文編號:(2019)臨審第(017)號)。