目前臨床上常采用量表方法評估腦卒中患者的上肢功能,但這種方法存在耗時長、評估結果一致性差、需康復醫師參與度高等問題。為克服量表方法的短板,結合傳感器和機器學習算法的上肢功能智能評估系統成為了近年來的研究熱點之一。本文首先對常用的臨床上肢功能評估方法做了分析總結,隨后對近年來智能評估系統的研究進行了綜述,重點對智能評估系統中數據采集和數據處理部分使用的技術及其優缺點進行了分析總結,最后對目前智能評估系統面臨的挑戰和未來的發展方向展開討論,以期為相關領域的研究學者提供有價值的參考信息。
引用本文: 李素姣, 吳坤, 孟巧玲, 喻洪流. 腦卒中患者上肢功能智能評估系統研究進展. 生物醫學工程學雜志, 2022, 39(3): 620-626, 632. doi: 10.7507/1001-5515.202112046 復制
版權信息: ?四川大學華西醫院華西期刊社《生物醫學工程學雜志》版權所有,未經授權不得轉載、改編
引言
腦卒中具有高發病率、高致殘率、高死亡率、高復發率和高經濟負擔的“五高”特點,是威脅人類健康的主要疾病之一[1]。隨著我國人口老齡化程度的持續加深,腦卒中患者逐年增多,2019年我國腦卒中患者出院人數已接近500萬人[2]。調查顯示,約75%的腦卒中幸存者伴有不同程度的運動功能障礙[3],這嚴重影響了其獨立生活能力,降低了生活質量。腦卒中患者的運動功能恢復緩慢,需要進行長期的康復治療[4]。現代康復醫學和臨床實踐表明,有效的運動康復訓練能夠改善腦卒中患者的運動功能,加快其運動能力的恢復進程[5]。
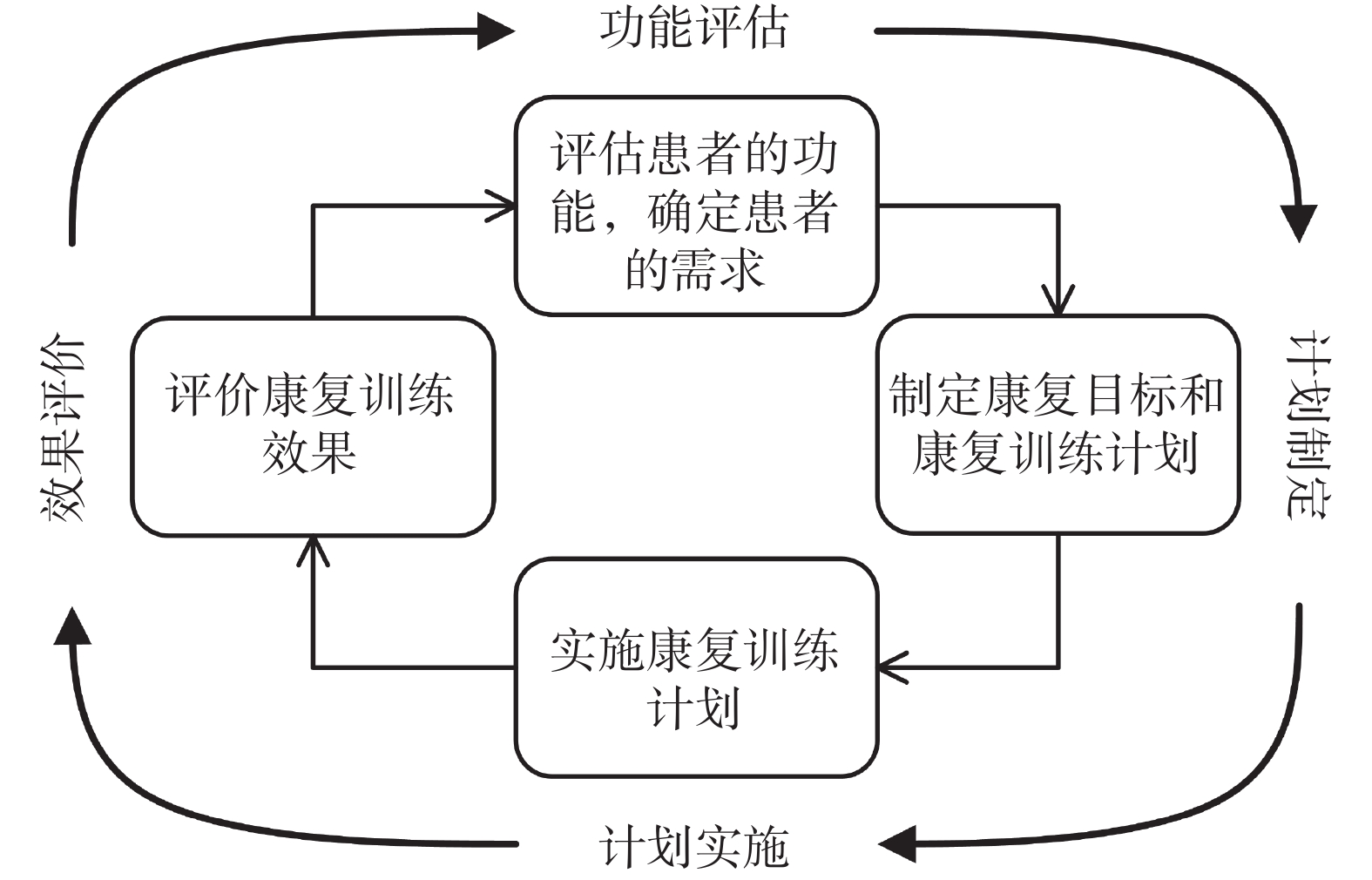
腦卒中患者的康復治療是一個循環的過程,主要分四個步驟:功能評估、計劃制定、計劃實施和效果評價[6],如圖1所示。康復治療的目的是最大程度恢復患者的運動功能,包括上肢和下肢等。人類的上肢與下肢相比,肌肉多,肌形較小且細長,運動更加靈活,承擔了人類在日常生活中的復雜精細任務,因此患者的上肢運動功能恢復更加困難。功能評估是康復治療的第一步,是康復治療的重要前提和依據,將直接關系到患者的整個康復進程和最終康復效果。康復醫師根據功能評估結果可確定康復目標,并選擇合適的康復治療方案,為患者提供個性化、精準化的康復治療,進而提高康復效率和療效,加快康復進程,減輕患者負擔。目前針對腦卒中患者的上肢功能評估,臨床上多采用量表方法[7]。量表方法是指康復醫師引導患者嘗試進行一系列的上肢動作,并根據動作的完成度打分,進而評估出患者的上肢功能[8]。目前康復醫學正向個性化、精準化、遠程化和智能化方向發展[9],這也是上肢功能評估的必然趨勢。隨著傳感器技術和機器學習算法的發展,不但可以使用傳感器提供客觀、精準的數據,補充康復醫師的主觀判斷[10],而且可以結合傳感器技術和機器學習算法設計智能評估系統,這是近年來康復學者研究的熱點之一。
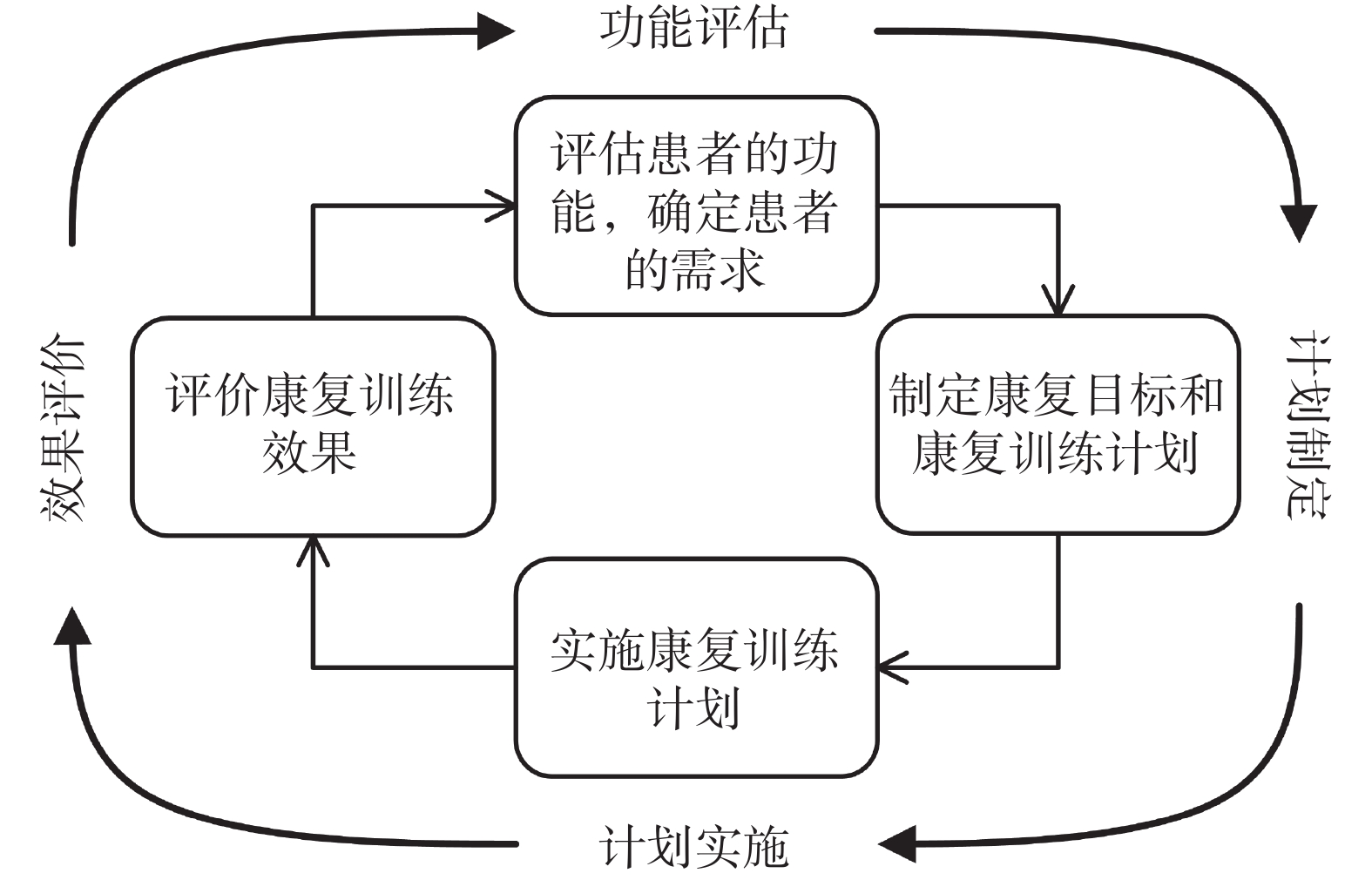 圖1
康復周期
Figure1.
The rehabilitation cycle
圖1
康復周期
Figure1.
The rehabilitation cycle
本文旨在綜述近年來上肢功能智能評估系統的研究進展,首先對常用的臨床上肢功能評估方法及其短板進行了分析總結,隨后對近年來典型的上肢功能智能評估系統進行了系統性分析總結,并重點綜述了智能評估系統中的數據采集和數據處理部分,最后對未來的智能評估系統的相關發展進行了展望,以期相關領域的研究學者能夠系統地了解目前上肢功能智能評估系統的研究進展和未來發展方向,提供有價值的參考信息。
1 臨床上肢功能評估方法
臨床常用的腦卒中患者上肢功能評估方法主要有布魯恩斯特朗分期(Brunnstrom recovery stages,BRS)、富爾-邁耶評估量表的上肢部分(Fugl-Meyer assessment of upper extremity,FMA-UE)、沃爾夫運動功能測試量表(Wolf motor function test,WMFT)和積木盒障礙測試(box and block test,BBT)等。BRS是當前應用最為廣泛的運動功能評估量表之一,具有可靠、簡便的特點[11]。FMA是由BRS進一步精確、量化而來,是腦卒中后運動功能定量評估中應用最廣泛的量表之一[12]。WMFT適用于腦卒中后各期的輕中度有腕指功能恢復的患者,并顯示出良好的信效度[13]。BBT是便攜版的標準化手部靈巧度測試,主要用于評估手部的粗大協調運動功能[13]。盡管這些量表經過驗證已認可其標準性,但其結果仍具有主觀性且依賴康復醫師的觀察能力,缺乏很好的再現性[14]。其次量表方法比較耗時,一次完整的上肢功能評估需要花費30~45 min[6],難以及時反饋患者的康復進程。量表方法還存在“天花板”效應,以及對運動表現的細微變化缺乏敏感等問題[15]。為克服量表方法的這些短板,智能評估系統成為了研究熱點,其具有耗時短、客觀性強等特點。
2 上肢功能智能評估系統
本文通過系統的文獻檢索,選取了近幾年研究腦卒中患者上肢功能智能評估系統的典型文獻,對智能評估系統的主要構成和關鍵參數進行了系統性分析和總結,如表1所示。表1中文獻根據發表時間由近到遠進行整理,選取的主要構成和關鍵參數包括對照臨床量表、受試者數量、數據采集方式、數據處理方法和結果等。對照臨床量表是智能評估系統的性能參考標準,決定了研究的方向;受試者數量體現了研究的廣度和適用性,包括腦卒中患者和健康人;數據采集方式是智能評估系統的客觀信號來源,是決定評估系統準確性的關鍵因素之一,包括慣性測量單元(inertial measurement unit,IMU)、表面肌電(surface electromyography,sEMG)傳感器、深度傳感器和腦電圖(electroencephalography,EEG)采集系統等;數據處理方法是決定智能評估系統可行性的關鍵技術之一;結果則體現了智能評估系統的可行性。一個完整的智能評估系統包括數據采集、數據處理和人機交互界面等部分,本節下文首先對近年來智能評估系統的整體研究情況進行了分析總結,隨后對其關鍵技術進行了重點分析,即數據采集和數據處理部分。
2.1 智能評估系統的整體研究情況
大部分研究結果表明,智能評估系統評估結果與量表評估結果之間具有相關性,有望替代量表評估方法用于臨床上功能評估。與量表評估方法相比,智能評估系統具有耗時短、客觀性強、評估結果一致性好、康復醫師參與度低等優點。但目前的研究尚處于理論研究階段,受試者數量少,與臨床結合不足,缺乏高質量大規模的臨床試驗,其大范圍臨床使用時的可靠性和適用性有待進一步研究。此外,目前的研究更偏向于對智能評估系統的評估指標和數據處理算法的研究,并與量表評估方法進行對比分析,尚未形成完善的智能評估體系。
數據采集和數據處理部分是智能評估系統的關鍵技術。目前智能評估系統采集的數據除傳統的空間運動數據外,還包含了人體生理信號,如sEMG信號、EEG信號等,并且生理信號越來越受到重視,具體的數據采集方式及其優缺點可見下文所述。此外,本文作者在整理的文獻中發現,目前智能評估系統使用的數據處理方法多為機器學習算法,具體的數據處理方法及其優缺點可見下文所述。
2.2 智能評估系統的數據采集部分
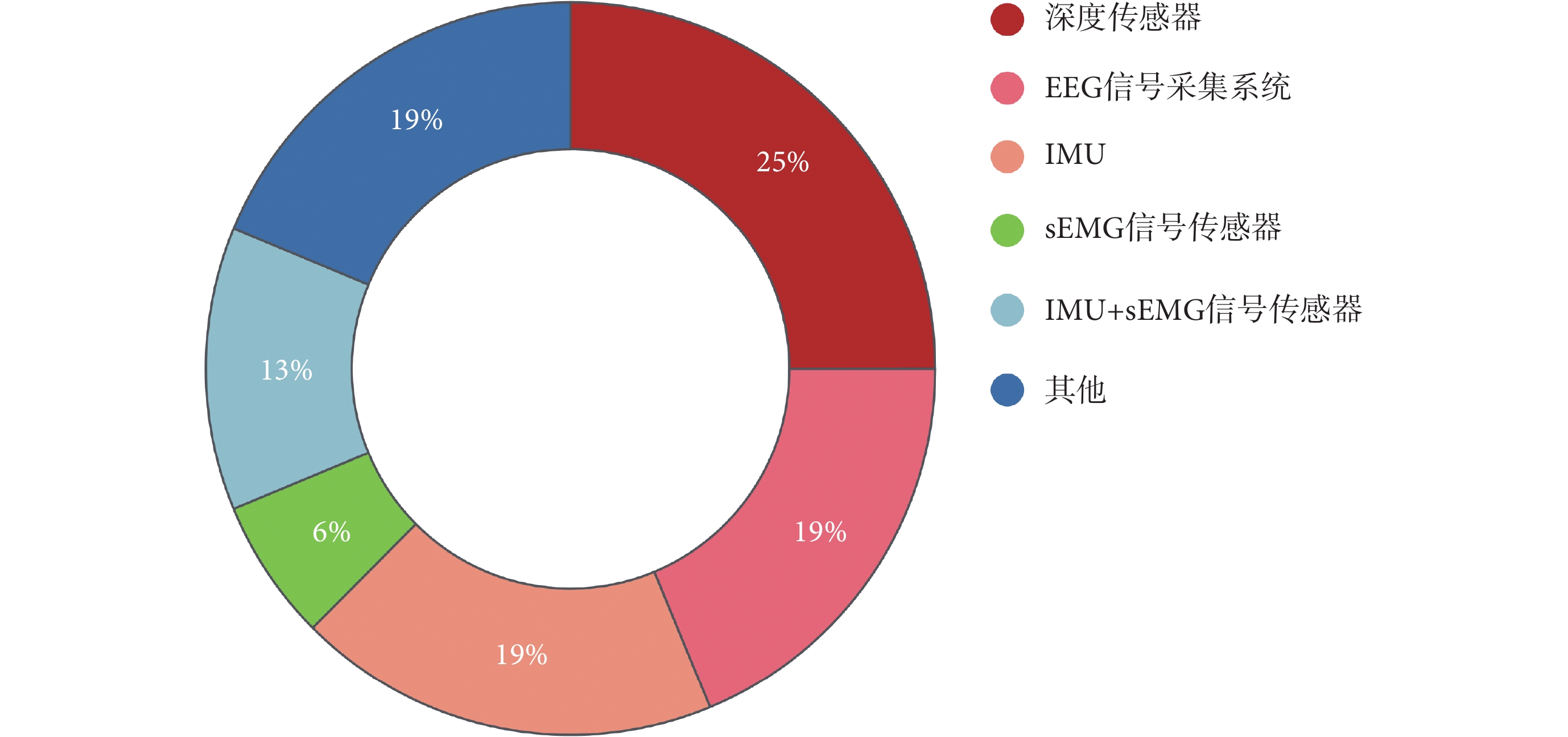
數據采集部分是智能評估系統的關鍵技術之一,數據的質量和穩定性與整個系統的可靠性息息相關,研究中常采用高精度傳感器或數據采集系統客觀地采集上肢功能相關的數據。如表1所示,上肢功能智能評估系統中常用的傳感器或數據采集系統包括IMU、sEMG信號傳感器、深度傳感器和EEG信號采集系統等,使用頻率和常見組合如圖2所示。深度傳感器因無需穿戴,且能提供豐富的上肢關節空間運動信息而廣受歡迎。而IMU和sEMG信號傳感器因良好的穿戴性受到歡迎,兩者的結合可以更加全面地反應患者的上肢功能[29]。
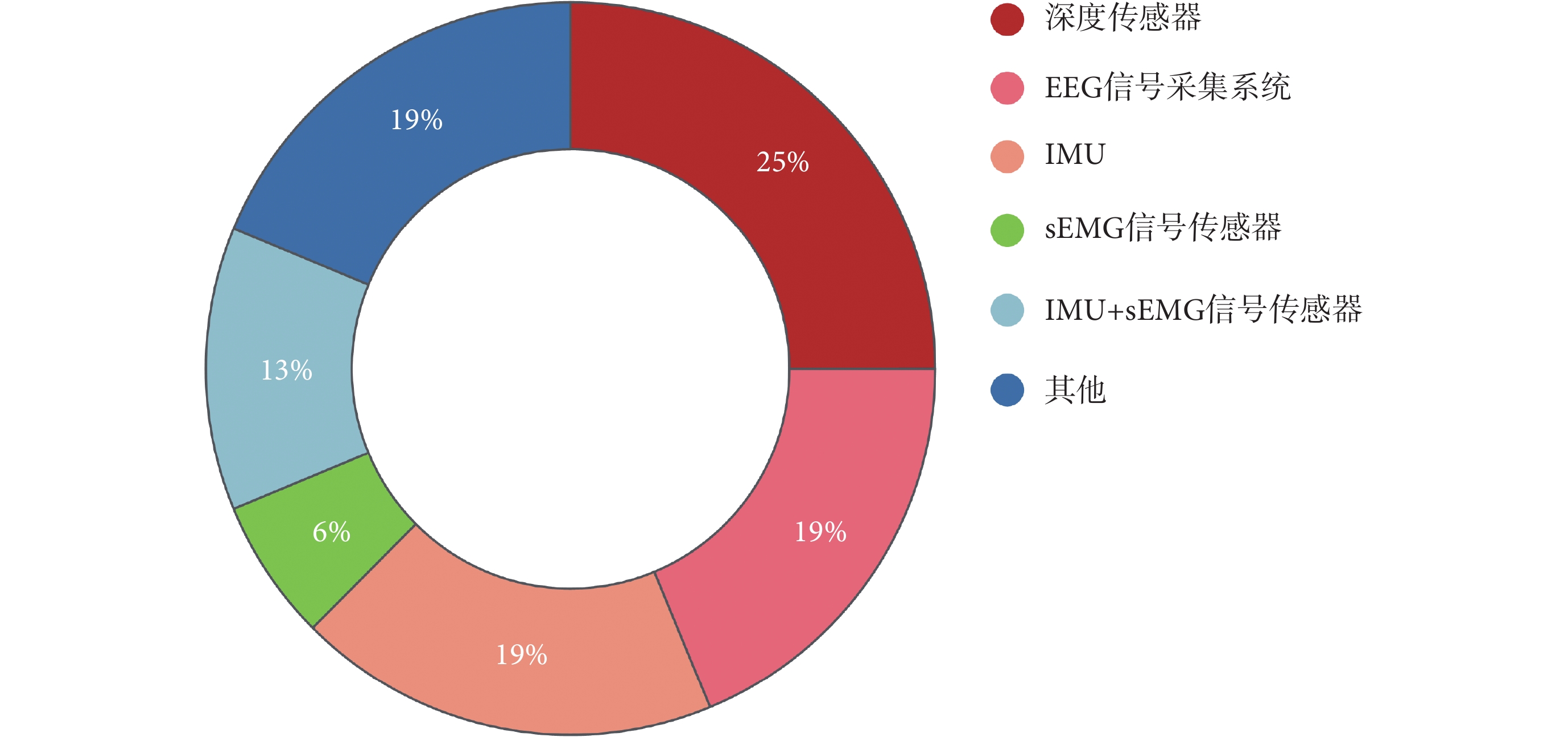 圖2
智能評估系統中傳感器或數據采集系統的使用頻率
Figure2.
Frequency of use of sensors or data acquisition system in intelligent evaluation system
圖2
智能評估系統中傳感器或數據采集系統的使用頻率
Figure2.
Frequency of use of sensors or data acquisition system in intelligent evaluation system
IMU是一種測量物體三軸加速度和角速度的傳感器,其內部集成了加速度計和角速度計(陀螺儀),并以此解算出物體的姿態,目前尺寸可以做到很小。IMU搭配先進的姿態解算器和濾波算法一起使用,在運動學定量測試中展現了良好的可靠性、準確度和精確度[30],市面上已有成熟的產品,結合無線數據傳輸技術,可以方便地采集上肢關節角度,這使得IMU是智能評估系統中非常實用的選擇。但IMU存在多種誤差易造成數據漂移,主要分為系統誤差和隨機誤差,系統誤差一般通過實驗來校正,而隨機誤差是數據漂移的主要因素[31]。針對IMU的隨機誤差處理,濾波技術是有效途徑之一,如使用卡爾曼濾波算法可以得到較好的效果[32]。近年來,有學者研究使用神經網絡算法減小誤差,取得了比卡爾曼濾波算法更好的效果,但不能分辨補償的誤差來源[33]。若直接將IMU穿戴在上肢上,運動時因肌肉變形會導致測量角度與實際角度有一定的偏離,可讓患者穿戴簡易外骨骼,并將IMU固定在外骨骼上避免這個問題。此外,在復雜的臨床環境下,磁場和溫度會對IMU測量準確度造成影響,可使用溫度補償和電磁屏蔽技術降低影響。
sEMG信號是肌肉運動時產生的微弱的生物電信號,能夠很好地反映肌肉的激活程度,是一種安全、無創的神經肌肉功能評估工具,在康復治療中應用廣泛[34],但采集時易受到其它電信號干擾[35],如電子設備的電信號等,因此使用前需要經過濾波和放大處理。sEMG信號傳感器從通道的角度可分為單通道、多通道和高密度,從數據傳輸方式的角度可分為有線傳輸和無線傳輸。目前的智能評估系統中使用的sEMG信號傳感器多為單通道,信號質量與電極的質量和放置位置關系密切,適用于采集大塊肌肉的sEMG信號[36]。使用高密度陣列式電極采集sEMG信號是研究熱點,可獲得sEMG信號豐富的時域和空間信息[37],但在智能評估系統研究中鮮有提及。從信號精準度來講,無線傳輸比有線傳輸更具優勢,電池供電可有效避免工頻干擾,信號采集時也較少由于肢體運動造成導線的串擾[38],但采集時長受電池限制。此外,無線傳輸更容易導致數據錯誤或丟失,可使用可靠的數據傳輸協議來避免這個問題。
深度傳感器是一種可以探測環境物體與傳感器之間距離的傳感器,其不僅可以得到環境物體的二維信息,還能夠獲取對應的深度(距離)信息[39]。常見的深度傳感器按照使用的技術可分為3種,分別是結構光、雙目立體成像和飛行時間法[39]。文獻分析發現,目前智能評估系統中使用較多的是一款三維(three-dimensional,3D)體感攝影機Kinect v2(Microsoft,美國),其內部集成了實時人體姿態識別算法,可用于捕捉人體關節的空間運動[6]。但是Kinect v2基于飛行時間法實現,分辨率低,使用時準確的誤差模型在目標識別和姿態識別算法中至關重要[40],其深度測量誤差與測量距離的平方成線性關系[41]。在識別評估手勢動作時,可以使用Leap Motion圖像傳感器(Leap,美國)實時定位手指關節的坐標,其基于雙目立體成像技術實現,深度測量精度可達亞毫米級,但可測量空間較小[23]。基于結構光技術實現的深度傳感器在智能評估系統研究中鮮有提及。深度傳感器使用時患者無需穿戴,十分方便,但需要場地和光照環境的支持,且需要避免其他人產生干擾。
EEG信號一般而言是由顱腔內的神經細胞所產生,并由大腦皮質傳導到頭皮表面被記錄到的電生理信號[42],已證明可以作為反映大腦功能活動的重要生理參數,包含了大量的生理與疾病信息,可進一步反映腦神經功能活動和損傷的有無及程度[43]。EEG信號具有無創、實時、連續、時間分辨率高以及認知意識相關性強等特性,但EEG信號是典型的極其微弱的非平穩隨機信號[44],在采集時極易被無關噪聲污染,如眼電、心電以及設備和實驗環境的電磁干擾等。EEG信號采集系統是放大并記錄EEG信號的儀器,其輸入阻抗、共模抑制比、帶寬、采樣率等都是關鍵指標[45]。EEG信號雖然具有能夠直接反映人的運動意圖、不易疲勞等優點,但EEG信號在采集和處理時十分繁瑣,對于智能評估系統的臨床應用具有一定的局限性。
2.3 智能評估系統的數據處理部分
數據處理部分是智能評估系統的關鍵技術之一,是決定評估系統準確性的關鍵因素。從分析的文獻來看,數據處理方法主要分為2大類,分別是基于公式的數據處理方法和基于機器學習算法的數據處理方法,后一類方法使用的較多。
基于公式的數據處理方法是指直接使用數學公式從測得的數據中計算出評估結果,而不需要經過數據集訓練的模型,使用的數學公式可分為經驗公式和推導公式。這種方法計算速度快,不需要大量數據,但非線性擬合效果較差。
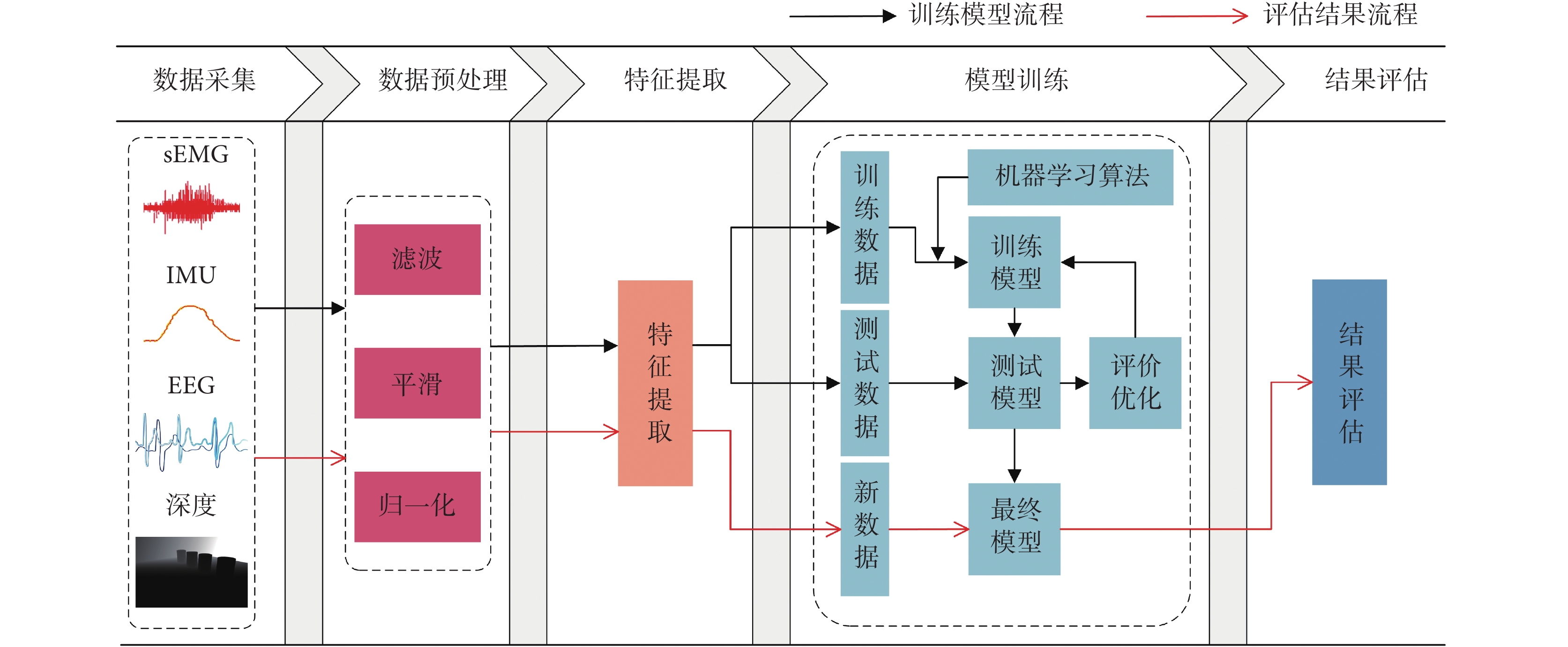
基于機器學習算法的數據處理方法是指經過數據集訓練的機器學習算法模型輸出評估結果的方法,這種方法可以很好地將輸入特征映射到輸出變量,研究中得到越來越廣泛的應用,其數據處理流程如圖3所示,常用的機器學習算法對比分析如表2所示[47-50]。傳統的機器學習算法,如K近鄰、隨機森林和支持向量機等,模型較為簡單,但使用時需要花費大量的時間和精力創建合適的輸入特征。隨著機器學習算法的深入研究,出現了更加復雜的算法模型。深度學習是一類將神經網絡作為參數結構進行優化的機器學習算法模型,包括卷積神經網絡、遞歸神經網絡和循環神經網絡等。與傳統的機器學習算法不同,深度學習可以從原始信號中自行學習輸入特征并完成分類[46],但需要較大的運算能力和大量數據,且模型設計復雜,可解釋性差。
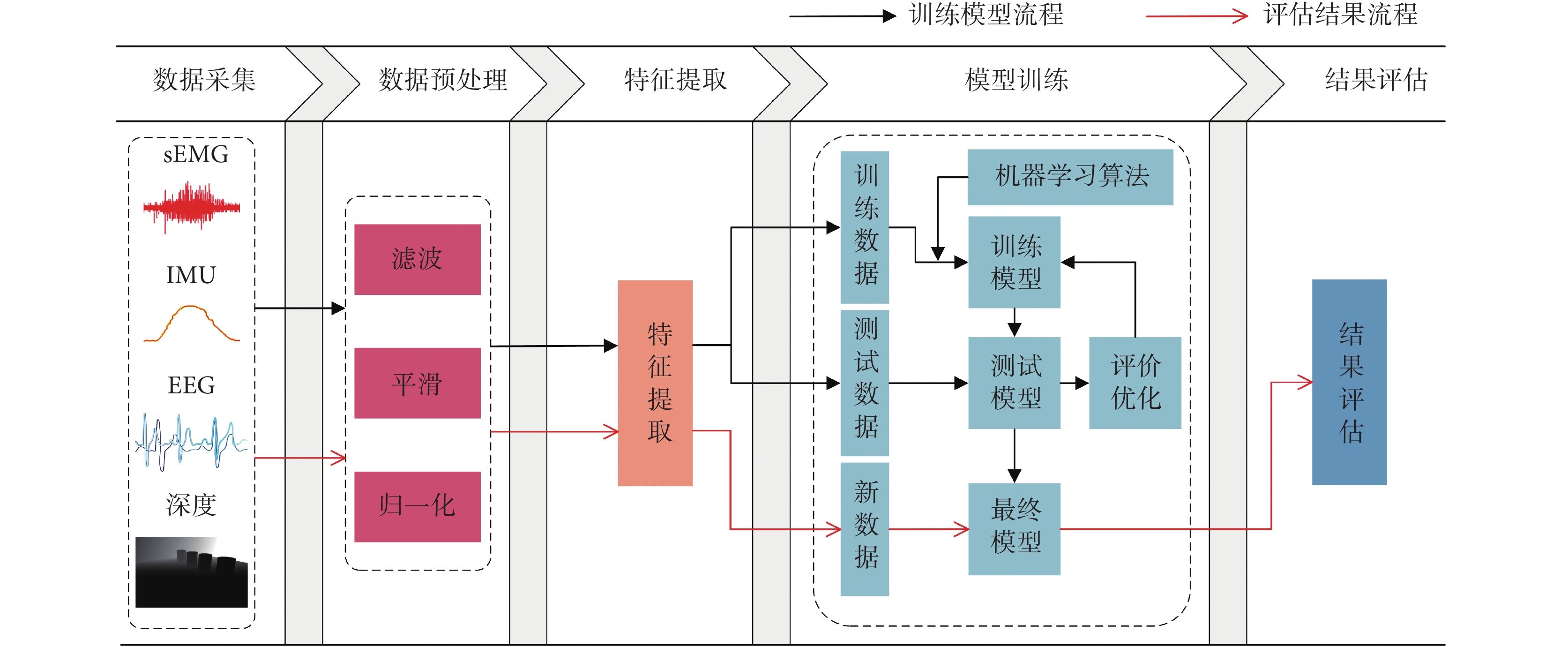 圖3
基于機器學習的數據處理流程
Figure3.
Data processing flow based on machine learning
圖3
基于機器學習的數據處理流程
Figure3.
Data processing flow based on machine learning
3 展望
近年來,有關上肢功能智能評估系統的研究越來越多,很多也已初見成效,但相關研究多處于理論研究階段,尚未在臨床上應用。目前的研究與臨床結合不夠緊密,缺乏高質量大規模的臨床試驗,智能評估系統的可靠性和適用性有待在臨床試驗中進一步驗證。未來的研究應與醫院多加合作,從臨床應用的角度出發研究智能評估系統的設計與應用。此外,智能評估系統需要建立合適的評估體系,包括評估指標的選取、評估結果的展示等。本文對智能評估系統不同部分進行了展望,包括數據采集、數據處理和人機交互界面部分。
3.1 數據采集部分展望
目前上肢功能智能評估系統中使用的評估數據來源還比較單一,表1中73%的研究僅使用了一種傳感器或數據采集系統,難以較全面地反映患者的上肢功能情況。接下來研究的一個重點是如何較好地同時采集多種物理信號和人體生理信號,從多方面評估上肢功能,提高智能評估系統的可靠性和適用性。此外,可以研究使用生活中常見的設備采集評估數據的可能性,如張瀟等[51]分析了腦卒中患者點擊觸摸屏上不同目標時產生的數據,結果表明其用于定量化上肢功能評估有一定的可行性。
3.2 數據處理部分展望
近年來,機器學習算法在智能評估系統中廣泛使用,并取得了不錯的結果,但選擇合適的機器學習算法和創建合適的表征上肢功能的輸入特征仍較為困難。因此不僅需要加大機器學習算法在智能評估領域的應用研究,而且需要深入研究表征上肢功能的物理和生理特征,尋找更合適的輸入特征。人體生理電信號已廣泛用于上肢功能評估,如sEMG信號、EEG信號等,但不同個體間生理電信號差別較大,克服個體間差異性對于智能評估系統是一個很大的挑戰。機器學習算法各有特色,研究不同算法的組合使用,或研究新的專用于人體生理電信號處理的算法,有望在未來解決個體間差異性問題。此外,在采集如運動信號、力信號、人體生理信號等多源信號的基礎上,可以進一步進行特征提取和篩選,確立多尺度上肢運動功能評估指標,研究多源信息融合的數據處理方法。
3.3 人機交互界面部分展望
已有文獻中,功能完善的人機交互界面報道較少。但智能評估系統在臨床應用時,人機交互界面也將起著重要作用。優秀的人機交互界面可以充當康復醫師的角色,在評估期間給予患者語音或視頻的指導和鼓勵,從而在幾乎無康復醫師參與的情況下完成評估,減輕康復醫師的負擔。人機交互界面的設計應基于人因工程理論,并從用戶的基本需求出發設計符合用戶知識背景、思維模式、操作習慣的界面框架和界面元素,實現所見即所得式的人機交互。虛擬現實(virtual reality, VR)技術用于越來越多的領域,設計基于VR的人機交互界面是一個很好的選擇。例如,Ona等[52]基于VR開發了用于康復訓練的嚴肅游戲和運動功能智能評估系統;Adams等[53]設計了模擬日常生活工具活動的VR環境,用于上肢功能評估。
4 總結
在時間和醫療資源受限的情況下,結合了先進的傳感器技術和機器學習算法的智能評估系統能夠為康復醫師提供決策支持,從而推動精準醫療的發展。相較于量表評估方法,智能評估系統具有耗時短、客觀性強等特點,且易于在家庭或社區中使用,能夠及時反饋患者的康復進程,進而制定個性化的康復治療方案,加快康復進程以減輕患者和家庭的經濟負擔。IMU、sEMG信號傳感器、深度傳感器和EEG信號采集系統是目前智能評估系統中常用的信號采集設備,提供了有關上肢功能的客觀而豐富的信息。功能強大且多種多樣的機器學習算法在智能評估系統中廣受歡迎,提供了良好的輸入到輸出的映射關系。目前的智能評估系統還存在著臨床應用研究不足、評估數據來源單一、個體間生理電信號差異性難以解決和人機交互性欠佳等問題。但隨著技術的發展和研究的深入,相信未來的智能評估系統能廣泛應用于臨床,造福患者和康復醫師。
重要聲明
利益沖突聲明:本文全體作者均聲明不存在利益沖突。
作者貢獻聲明:李素姣主要負責綜述論文的文獻分析、論文部分撰寫、修改與指導;吳坤主要負責文獻資料的整理、分析、撰寫和修改;孟巧玲主要負責論文的修改和指導;喻洪流主要負責論文的修改和審校。
倫理聲明:本文不涉及倫理。
引言
腦卒中具有高發病率、高致殘率、高死亡率、高復發率和高經濟負擔的“五高”特點,是威脅人類健康的主要疾病之一[1]。隨著我國人口老齡化程度的持續加深,腦卒中患者逐年增多,2019年我國腦卒中患者出院人數已接近500萬人[2]。調查顯示,約75%的腦卒中幸存者伴有不同程度的運動功能障礙[3],這嚴重影響了其獨立生活能力,降低了生活質量。腦卒中患者的運動功能恢復緩慢,需要進行長期的康復治療[4]。現代康復醫學和臨床實踐表明,有效的運動康復訓練能夠改善腦卒中患者的運動功能,加快其運動能力的恢復進程[5]。
腦卒中患者的康復治療是一個循環的過程,主要分四個步驟:功能評估、計劃制定、計劃實施和效果評價[6],如圖1所示。康復治療的目的是最大程度恢復患者的運動功能,包括上肢和下肢等。人類的上肢與下肢相比,肌肉多,肌形較小且細長,運動更加靈活,承擔了人類在日常生活中的復雜精細任務,因此患者的上肢運動功能恢復更加困難。功能評估是康復治療的第一步,是康復治療的重要前提和依據,將直接關系到患者的整個康復進程和最終康復效果。康復醫師根據功能評估結果可確定康復目標,并選擇合適的康復治療方案,為患者提供個性化、精準化的康復治療,進而提高康復效率和療效,加快康復進程,減輕患者負擔。目前針對腦卒中患者的上肢功能評估,臨床上多采用量表方法[7]。量表方法是指康復醫師引導患者嘗試進行一系列的上肢動作,并根據動作的完成度打分,進而評估出患者的上肢功能[8]。目前康復醫學正向個性化、精準化、遠程化和智能化方向發展[9],這也是上肢功能評估的必然趨勢。隨著傳感器技術和機器學習算法的發展,不但可以使用傳感器提供客觀、精準的數據,補充康復醫師的主觀判斷[10],而且可以結合傳感器技術和機器學習算法設計智能評估系統,這是近年來康復學者研究的熱點之一。
圖1
康復周期
Figure1.
The rehabilitation cycle
本文旨在綜述近年來上肢功能智能評估系統的研究進展,首先對常用的臨床上肢功能評估方法及其短板進行了分析總結,隨后對近年來典型的上肢功能智能評估系統進行了系統性分析總結,并重點綜述了智能評估系統中的數據采集和數據處理部分,最后對未來的智能評估系統的相關發展進行了展望,以期相關領域的研究學者能夠系統地了解目前上肢功能智能評估系統的研究進展和未來發展方向,提供有價值的參考信息。
1 臨床上肢功能評估方法
臨床常用的腦卒中患者上肢功能評估方法主要有布魯恩斯特朗分期(Brunnstrom recovery stages,BRS)、富爾-邁耶評估量表的上肢部分(Fugl-Meyer assessment of upper extremity,FMA-UE)、沃爾夫運動功能測試量表(Wolf motor function test,WMFT)和積木盒障礙測試(box and block test,BBT)等。BRS是當前應用最為廣泛的運動功能評估量表之一,具有可靠、簡便的特點[11]。FMA是由BRS進一步精確、量化而來,是腦卒中后運動功能定量評估中應用最廣泛的量表之一[12]。WMFT適用于腦卒中后各期的輕中度有腕指功能恢復的患者,并顯示出良好的信效度[13]。BBT是便攜版的標準化手部靈巧度測試,主要用于評估手部的粗大協調運動功能[13]。盡管這些量表經過驗證已認可其標準性,但其結果仍具有主觀性且依賴康復醫師的觀察能力,缺乏很好的再現性[14]。其次量表方法比較耗時,一次完整的上肢功能評估需要花費30~45 min[6],難以及時反饋患者的康復進程。量表方法還存在“天花板”效應,以及對運動表現的細微變化缺乏敏感等問題[15]。為克服量表方法的這些短板,智能評估系統成為了研究熱點,其具有耗時短、客觀性強等特點。
2 上肢功能智能評估系統
本文通過系統的文獻檢索,選取了近幾年研究腦卒中患者上肢功能智能評估系統的典型文獻,對智能評估系統的主要構成和關鍵參數進行了系統性分析和總結,如表1所示。表1中文獻根據發表時間由近到遠進行整理,選取的主要構成和關鍵參數包括對照臨床量表、受試者數量、數據采集方式、數據處理方法和結果等。對照臨床量表是智能評估系統的性能參考標準,決定了研究的方向;受試者數量體現了研究的廣度和適用性,包括腦卒中患者和健康人;數據采集方式是智能評估系統的客觀信號來源,是決定評估系統準確性的關鍵因素之一,包括慣性測量單元(inertial measurement unit,IMU)、表面肌電(surface electromyography,sEMG)傳感器、深度傳感器和腦電圖(electroencephalography,EEG)采集系統等;數據處理方法是決定智能評估系統可行性的關鍵技術之一;結果則體現了智能評估系統的可行性。一個完整的智能評估系統包括數據采集、數據處理和人機交互界面等部分,本節下文首先對近年來智能評估系統的整體研究情況進行了分析總結,隨后對其關鍵技術進行了重點分析,即數據采集和數據處理部分。
2.1 智能評估系統的整體研究情況
大部分研究結果表明,智能評估系統評估結果與量表評估結果之間具有相關性,有望替代量表評估方法用于臨床上功能評估。與量表評估方法相比,智能評估系統具有耗時短、客觀性強、評估結果一致性好、康復醫師參與度低等優點。但目前的研究尚處于理論研究階段,受試者數量少,與臨床結合不足,缺乏高質量大規模的臨床試驗,其大范圍臨床使用時的可靠性和適用性有待進一步研究。此外,目前的研究更偏向于對智能評估系統的評估指標和數據處理算法的研究,并與量表評估方法進行對比分析,尚未形成完善的智能評估體系。
數據采集和數據處理部分是智能評估系統的關鍵技術。目前智能評估系統采集的數據除傳統的空間運動數據外,還包含了人體生理信號,如sEMG信號、EEG信號等,并且生理信號越來越受到重視,具體的數據采集方式及其優缺點可見下文所述。此外,本文作者在整理的文獻中發現,目前智能評估系統使用的數據處理方法多為機器學習算法,具體的數據處理方法及其優缺點可見下文所述。
2.2 智能評估系統的數據采集部分
數據采集部分是智能評估系統的關鍵技術之一,數據的質量和穩定性與整個系統的可靠性息息相關,研究中常采用高精度傳感器或數據采集系統客觀地采集上肢功能相關的數據。如表1所示,上肢功能智能評估系統中常用的傳感器或數據采集系統包括IMU、sEMG信號傳感器、深度傳感器和EEG信號采集系統等,使用頻率和常見組合如圖2所示。深度傳感器因無需穿戴,且能提供豐富的上肢關節空間運動信息而廣受歡迎。而IMU和sEMG信號傳感器因良好的穿戴性受到歡迎,兩者的結合可以更加全面地反應患者的上肢功能[29]。
圖2
智能評估系統中傳感器或數據采集系統的使用頻率
Figure2.
Frequency of use of sensors or data acquisition system in intelligent evaluation system
IMU是一種測量物體三軸加速度和角速度的傳感器,其內部集成了加速度計和角速度計(陀螺儀),并以此解算出物體的姿態,目前尺寸可以做到很小。IMU搭配先進的姿態解算器和濾波算法一起使用,在運動學定量測試中展現了良好的可靠性、準確度和精確度[30],市面上已有成熟的產品,結合無線數據傳輸技術,可以方便地采集上肢關節角度,這使得IMU是智能評估系統中非常實用的選擇。但IMU存在多種誤差易造成數據漂移,主要分為系統誤差和隨機誤差,系統誤差一般通過實驗來校正,而隨機誤差是數據漂移的主要因素[31]。針對IMU的隨機誤差處理,濾波技術是有效途徑之一,如使用卡爾曼濾波算法可以得到較好的效果[32]。近年來,有學者研究使用神經網絡算法減小誤差,取得了比卡爾曼濾波算法更好的效果,但不能分辨補償的誤差來源[33]。若直接將IMU穿戴在上肢上,運動時因肌肉變形會導致測量角度與實際角度有一定的偏離,可讓患者穿戴簡易外骨骼,并將IMU固定在外骨骼上避免這個問題。此外,在復雜的臨床環境下,磁場和溫度會對IMU測量準確度造成影響,可使用溫度補償和電磁屏蔽技術降低影響。
sEMG信號是肌肉運動時產生的微弱的生物電信號,能夠很好地反映肌肉的激活程度,是一種安全、無創的神經肌肉功能評估工具,在康復治療中應用廣泛[34],但采集時易受到其它電信號干擾[35],如電子設備的電信號等,因此使用前需要經過濾波和放大處理。sEMG信號傳感器從通道的角度可分為單通道、多通道和高密度,從數據傳輸方式的角度可分為有線傳輸和無線傳輸。目前的智能評估系統中使用的sEMG信號傳感器多為單通道,信號質量與電極的質量和放置位置關系密切,適用于采集大塊肌肉的sEMG信號[36]。使用高密度陣列式電極采集sEMG信號是研究熱點,可獲得sEMG信號豐富的時域和空間信息[37],但在智能評估系統研究中鮮有提及。從信號精準度來講,無線傳輸比有線傳輸更具優勢,電池供電可有效避免工頻干擾,信號采集時也較少由于肢體運動造成導線的串擾[38],但采集時長受電池限制。此外,無線傳輸更容易導致數據錯誤或丟失,可使用可靠的數據傳輸協議來避免這個問題。
深度傳感器是一種可以探測環境物體與傳感器之間距離的傳感器,其不僅可以得到環境物體的二維信息,還能夠獲取對應的深度(距離)信息[39]。常見的深度傳感器按照使用的技術可分為3種,分別是結構光、雙目立體成像和飛行時間法[39]。文獻分析發現,目前智能評估系統中使用較多的是一款三維(three-dimensional,3D)體感攝影機Kinect v2(Microsoft,美國),其內部集成了實時人體姿態識別算法,可用于捕捉人體關節的空間運動[6]。但是Kinect v2基于飛行時間法實現,分辨率低,使用時準確的誤差模型在目標識別和姿態識別算法中至關重要[40],其深度測量誤差與測量距離的平方成線性關系[41]。在識別評估手勢動作時,可以使用Leap Motion圖像傳感器(Leap,美國)實時定位手指關節的坐標,其基于雙目立體成像技術實現,深度測量精度可達亞毫米級,但可測量空間較小[23]。基于結構光技術實現的深度傳感器在智能評估系統研究中鮮有提及。深度傳感器使用時患者無需穿戴,十分方便,但需要場地和光照環境的支持,且需要避免其他人產生干擾。
EEG信號一般而言是由顱腔內的神經細胞所產生,并由大腦皮質傳導到頭皮表面被記錄到的電生理信號[42],已證明可以作為反映大腦功能活動的重要生理參數,包含了大量的生理與疾病信息,可進一步反映腦神經功能活動和損傷的有無及程度[43]。EEG信號具有無創、實時、連續、時間分辨率高以及認知意識相關性強等特性,但EEG信號是典型的極其微弱的非平穩隨機信號[44],在采集時極易被無關噪聲污染,如眼電、心電以及設備和實驗環境的電磁干擾等。EEG信號采集系統是放大并記錄EEG信號的儀器,其輸入阻抗、共模抑制比、帶寬、采樣率等都是關鍵指標[45]。EEG信號雖然具有能夠直接反映人的運動意圖、不易疲勞等優點,但EEG信號在采集和處理時十分繁瑣,對于智能評估系統的臨床應用具有一定的局限性。
2.3 智能評估系統的數據處理部分
數據處理部分是智能評估系統的關鍵技術之一,是決定評估系統準確性的關鍵因素。從分析的文獻來看,數據處理方法主要分為2大類,分別是基于公式的數據處理方法和基于機器學習算法的數據處理方法,后一類方法使用的較多。
基于公式的數據處理方法是指直接使用數學公式從測得的數據中計算出評估結果,而不需要經過數據集訓練的模型,使用的數學公式可分為經驗公式和推導公式。這種方法計算速度快,不需要大量數據,但非線性擬合效果較差。
基于機器學習算法的數據處理方法是指經過數據集訓練的機器學習算法模型輸出評估結果的方法,這種方法可以很好地將輸入特征映射到輸出變量,研究中得到越來越廣泛的應用,其數據處理流程如圖3所示,常用的機器學習算法對比分析如表2所示[47-50]。傳統的機器學習算法,如K近鄰、隨機森林和支持向量機等,模型較為簡單,但使用時需要花費大量的時間和精力創建合適的輸入特征。隨著機器學習算法的深入研究,出現了更加復雜的算法模型。深度學習是一類將神經網絡作為參數結構進行優化的機器學習算法模型,包括卷積神經網絡、遞歸神經網絡和循環神經網絡等。與傳統的機器學習算法不同,深度學習可以從原始信號中自行學習輸入特征并完成分類[46],但需要較大的運算能力和大量數據,且模型設計復雜,可解釋性差。
圖3
基于機器學習的數據處理流程
Figure3.
Data processing flow based on machine learning
3 展望
近年來,有關上肢功能智能評估系統的研究越來越多,很多也已初見成效,但相關研究多處于理論研究階段,尚未在臨床上應用。目前的研究與臨床結合不夠緊密,缺乏高質量大規模的臨床試驗,智能評估系統的可靠性和適用性有待在臨床試驗中進一步驗證。未來的研究應與醫院多加合作,從臨床應用的角度出發研究智能評估系統的設計與應用。此外,智能評估系統需要建立合適的評估體系,包括評估指標的選取、評估結果的展示等。本文對智能評估系統不同部分進行了展望,包括數據采集、數據處理和人機交互界面部分。
3.1 數據采集部分展望
目前上肢功能智能評估系統中使用的評估數據來源還比較單一,表1中73%的研究僅使用了一種傳感器或數據采集系統,難以較全面地反映患者的上肢功能情況。接下來研究的一個重點是如何較好地同時采集多種物理信號和人體生理信號,從多方面評估上肢功能,提高智能評估系統的可靠性和適用性。此外,可以研究使用生活中常見的設備采集評估數據的可能性,如張瀟等[51]分析了腦卒中患者點擊觸摸屏上不同目標時產生的數據,結果表明其用于定量化上肢功能評估有一定的可行性。
3.2 數據處理部分展望
近年來,機器學習算法在智能評估系統中廣泛使用,并取得了不錯的結果,但選擇合適的機器學習算法和創建合適的表征上肢功能的輸入特征仍較為困難。因此不僅需要加大機器學習算法在智能評估領域的應用研究,而且需要深入研究表征上肢功能的物理和生理特征,尋找更合適的輸入特征。人體生理電信號已廣泛用于上肢功能評估,如sEMG信號、EEG信號等,但不同個體間生理電信號差別較大,克服個體間差異性對于智能評估系統是一個很大的挑戰。機器學習算法各有特色,研究不同算法的組合使用,或研究新的專用于人體生理電信號處理的算法,有望在未來解決個體間差異性問題。此外,在采集如運動信號、力信號、人體生理信號等多源信號的基礎上,可以進一步進行特征提取和篩選,確立多尺度上肢運動功能評估指標,研究多源信息融合的數據處理方法。
3.3 人機交互界面部分展望
已有文獻中,功能完善的人機交互界面報道較少。但智能評估系統在臨床應用時,人機交互界面也將起著重要作用。優秀的人機交互界面可以充當康復醫師的角色,在評估期間給予患者語音或視頻的指導和鼓勵,從而在幾乎無康復醫師參與的情況下完成評估,減輕康復醫師的負擔。人機交互界面的設計應基于人因工程理論,并從用戶的基本需求出發設計符合用戶知識背景、思維模式、操作習慣的界面框架和界面元素,實現所見即所得式的人機交互。虛擬現實(virtual reality, VR)技術用于越來越多的領域,設計基于VR的人機交互界面是一個很好的選擇。例如,Ona等[52]基于VR開發了用于康復訓練的嚴肅游戲和運動功能智能評估系統;Adams等[53]設計了模擬日常生活工具活動的VR環境,用于上肢功能評估。
4 總結
在時間和醫療資源受限的情況下,結合了先進的傳感器技術和機器學習算法的智能評估系統能夠為康復醫師提供決策支持,從而推動精準醫療的發展。相較于量表評估方法,智能評估系統具有耗時短、客觀性強等特點,且易于在家庭或社區中使用,能夠及時反饋患者的康復進程,進而制定個性化的康復治療方案,加快康復進程以減輕患者和家庭的經濟負擔。IMU、sEMG信號傳感器、深度傳感器和EEG信號采集系統是目前智能評估系統中常用的信號采集設備,提供了有關上肢功能的客觀而豐富的信息。功能強大且多種多樣的機器學習算法在智能評估系統中廣受歡迎,提供了良好的輸入到輸出的映射關系。目前的智能評估系統還存在著臨床應用研究不足、評估數據來源單一、個體間生理電信號差異性難以解決和人機交互性欠佳等問題。但隨著技術的發展和研究的深入,相信未來的智能評估系統能廣泛應用于臨床,造福患者和康復醫師。
重要聲明
利益沖突聲明:本文全體作者均聲明不存在利益沖突。
作者貢獻聲明:李素姣主要負責綜述論文的文獻分析、論文部分撰寫、修改與指導;吳坤主要負責文獻資料的整理、分析、撰寫和修改;孟巧玲主要負責論文的修改和指導;喻洪流主要負責論文的修改和審校。
倫理聲明:本文不涉及倫理。