為了探究將磁刺激技術應用于動物機器人運動控制的可行性,本文面向鴿子機器人,仿真分析線圈半徑、匝數等因素對磁刺激強度、深度及聚焦性的影響,提出線圈設計方案。將線圈置于鴿子頭部及腿部,磁刺激同時記錄腿部肌電。結果發現,磁刺激時肌電明顯增強。降低磁刺激系統輸出頻率,輸出電流增大,肌電隨之增強。與腦部磁刺激相比,刺激坐骨神經引起的肌電增強反應更為顯著。這表明,磁刺激系統通過驅動該線圈可以有效地實現對腦及外周神經功能的調控。本研究為后續實用性線圈優化改進提供了理論及實驗指導,為動物機器人磁刺激運動控制實施奠定了初步的理論和實驗基礎。
引用本文: 許孟華, 蒲鑫, 常銘, 宋陽, 馬福喆, 槐瑞托, 楊俊卿, 常輝, 邵峰, 汪慧. 面向鴿子機器人的磁刺激線圈仿真設計及實驗研究. 生物醫學工程學雜志, 2023, 40(1): 141-148. doi: 10.7507/1001-5515.202211057 復制
版權信息: ?四川大學華西醫院華西期刊社《生物醫學工程學雜志》版權所有,未經授權不得轉載、改編
0 引言
隨著腦機接口技術及人工智能研究的廣泛興起,在災難救援、軍事領域有著深遠應用前景的動物機器人日益成為世界前沿科技的關注熱點,陸續研發出機器人鼠[1-3]、機器人昆蟲[4-5]、機器人鴿[6-7]、機器人海龜[8]、機器人壁虎[9]、機器人魚[10-11]等。所謂動物機器人是人類通過生物控制技術施加干預信號調控動物的生物行為從而實現人類操縱的動物[11]。所使用的生物控制技術以電刺激為主,此外還有光刺激、磁刺激等。電刺激技術需要植入電極,優點是刺激點定位準確,控制效果好。缺點是侵入式刺激對腦組織造成損傷,容易引發腦內感染,而且再生的神經組織包裹植入的微電極,會導致動物機器人對電刺激響應的靈敏度日漸下降甚至消失[6]。
無創刺激可以避免上述問題的出現。2018年,燕山大學彭勇教授團隊[11]研發了一種用于鯉魚機器人的光刺激裝置及光控實驗方法,該方法不損傷腦組織,在暗光環境下可以控制鯉魚機器人前進及轉向運動,成功率在50%~80%,這表明無創刺激在動物機器人運動控制方面是可行的。
磁刺激也是一種非常重要的無創刺激技術。1985年,Baker等[12]提出基于圓形線圈的經顱磁刺激技術(transcranial magnetic stimulation,TMS)。時變電流流入線圈,產生高強度時變脈沖磁場,從而在組織內產生感應電場和感生電流,可興奮組織產生動作電位。相較于電刺激及光刺激,磁刺激無創、無痛,磁場通過骨骼、脂肪等組織時幾乎沒有衰減,可以穿過體表到達大腦深處刺激中樞神經系統,有效調控神經功能。研究表明,單脈沖及雙脈沖磁刺激均可使皮層神經元去極化產生動作電位,在大腦皮層運動區產生動作誘發電位。重復性TMS可以調節皮層組織的興奮性[13]。近年來TMS已經成為臨床治療抑郁癥、阿爾茨海默病、帕金森病、腦卒中后遺癥等十分重要的手段。
目前,國內外關于磁刺激的研究層出不窮[14-15],但主要關注點在臨床治療方面,面向對象為人。截至目前,尚未見到將TMS用于動物機器人運動控制的研究報道。作為非侵入型腦刺激領域里最主要的技術工具之一,我們推測,具有神經調控功能的磁刺激也可以控制動物機器人的運動行為。
TMS性能有三個重要評價指標,分別是刺激強度、刺激深度和聚焦性。這三個指標都和線圈設計有密切關系,磁刺激線圈是TMS的核心部分。最早出現的是圓形線圈[12],它刺激范圍大,聚焦度差。1988年,Ueno等[16]提出了8字型線圈,它由兩個共面反向電流的圓形線圈組成,其聚焦性優于圓形線圈,刺激分辨率高,但刺激深度不夠理想。1995年,Ren等[17]設計了slinky線圈,在8字形線圈基礎上在其垂直面上增加一個線圈,線圈中心的電場增強,但聚焦度不夠。2002年,Roth等[18]發明了H形線圈,它的刺激深度優于8字形線圈,但聚焦性差。此外,使用輔助手段,例如高磁導率的鐵芯[19]和屏蔽版[20]等也可以優化線圈的電磁場分布。
與臨床使用的線圈相比,應用于小動物的磁刺激線圈刺激深度較淺,但對聚焦性的要求更高,目前相關研究相對較少,而且多面向嚙齒類動物。2005年,Zheng等[21]開展了TMS大鼠真實頭模型感應電場分布研究,并給出了適合大鼠的線圈形狀與參數。2009年,Salvador等[19]開展了針對小動物磁刺激線圈幾何形狀、尺寸和方向影響的建模研究。2018年,Selvaraj等[22]設計了針對小鼠的經顱磁刺激器和聚焦線圈。2021年,Carmona等[23]研發了針對小動物的高聚焦性碳鋼芯線圈。
本文就動物機器人的磁刺激控制進行初步嘗試和探索。針對鴿子機器人的運動控制,建立鴿子頭部模型,選用聚焦性最好的8字形線圈,通過有限元仿真分析線圈的大小、繞制方法、擺放角度等因素對刺激強度、深度及聚焦性的影響,提出磁刺激線圈設計方案,做出簡單實物,進行了初步的實驗驗證,為后續實用性線圈優化改進提供理論指導,為面向動物機器人的磁刺激系統設計改進、磁刺激靶區定位、鴿子機器人磁刺激控制實施等奠定初步的理論和實驗基礎。
1 方法
1.1 電磁場理論
Maxwell方程組是分析電磁場的基礎,由Maxwell方程組又推導出畢奧-薩伐爾定律。單匝線圈中電流為  ,任一電流元
,任一電流元  在空間某點產生的磁感應強度為
在空間某點產生的磁感應強度為  ,在刺激靶區任一點沿著線圈閉合電流線C產生的磁場強度B可由式(1)表示:
,在刺激靶區任一點沿著線圈閉合電流線C產生的磁場強度B可由式(1)表示:
 |
其中, 是被刺激區域磁導率(單位為H·m?1),R 是線圈上的電流元到被刺激點位的距離。依據Faraday電磁感應定律,線圈產生的時變磁場B在空間中可以感應出一定強度的電場E,可通過Maxwell方程來表示,如式(2)所示:
是被刺激區域磁導率(單位為H·m?1),R 是線圈上的電流元到被刺激點位的距離。依據Faraday電磁感應定律,線圈產生的時變磁場B在空間中可以感應出一定強度的電場E,可通過Maxwell方程來表示,如式(2)所示:
 |
若把通入變化電流的線圈置于大腦周圍,大腦可以看作是個封閉的導體,腦組織的電導率是 ,在感應電場作用下,腦組織中產生的感生電流密度
,在感應電場作用下,腦組織中產生的感生電流密度 可以表示為式(3):
可以表示為式(3):
 |
感應電流密度 與感應電場
與感應電場 的強度成正比,而磁場強度
的強度成正比,而磁場強度 的變化率決定了感應電場
的變化率決定了感應電場 。
。
1.2 建立模型
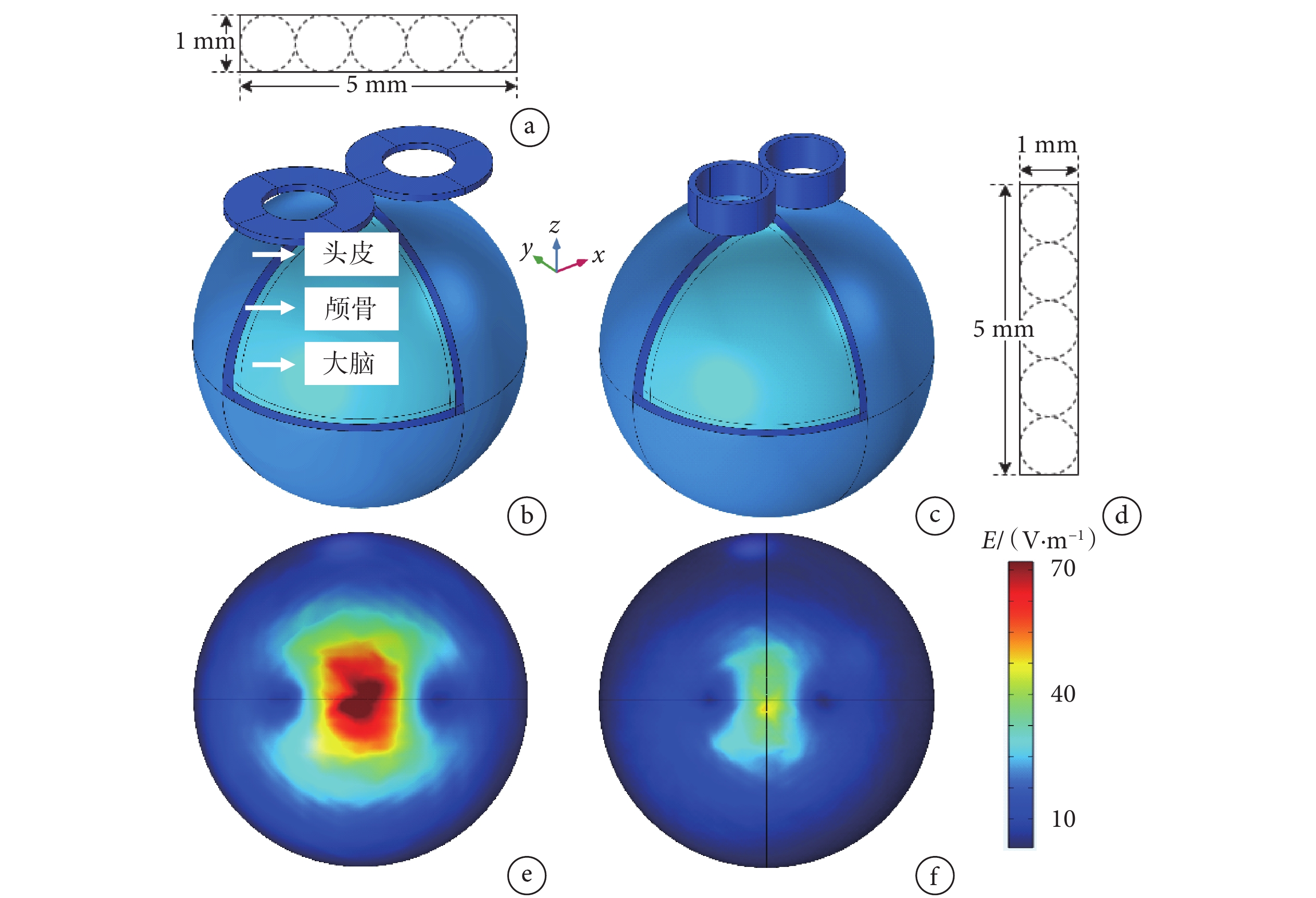
利用有限元仿真軟件COMSOL建立頭部和線圈模型。本文以家鴿為研究對象。由于生物體內電導率及組織和頭骨厚度并不均勻,且個體間也有差異,不易于建立真實模型,故采用Rush的均勻三層同心球模型[24]。該模型雖然簡單,但對磁刺激線圈的刺激參數,例如聚焦性以及刺激深度等評估具有非常重要的參考意義。經實測6只家鴿,獲知其頭部寬度平均大約4 cm。結合家鴿生理解剖知識設置結構參數,第一層由皮膚、淺筋膜、枕額肌與腱膜組成,稱為頭皮層,厚度設置為1.75 mm;第二層將腦脊液與顱骨合為一層,稱為顱骨層,厚度設置為1.25 mm;第三層將灰質和白質合在一起,稱為大腦層。三層頭模型的結構和材料屬性如表1所示。將各層的相對介電常數均設置為1.0[25]。圖1b為簡化三層同心球模型示意圖。
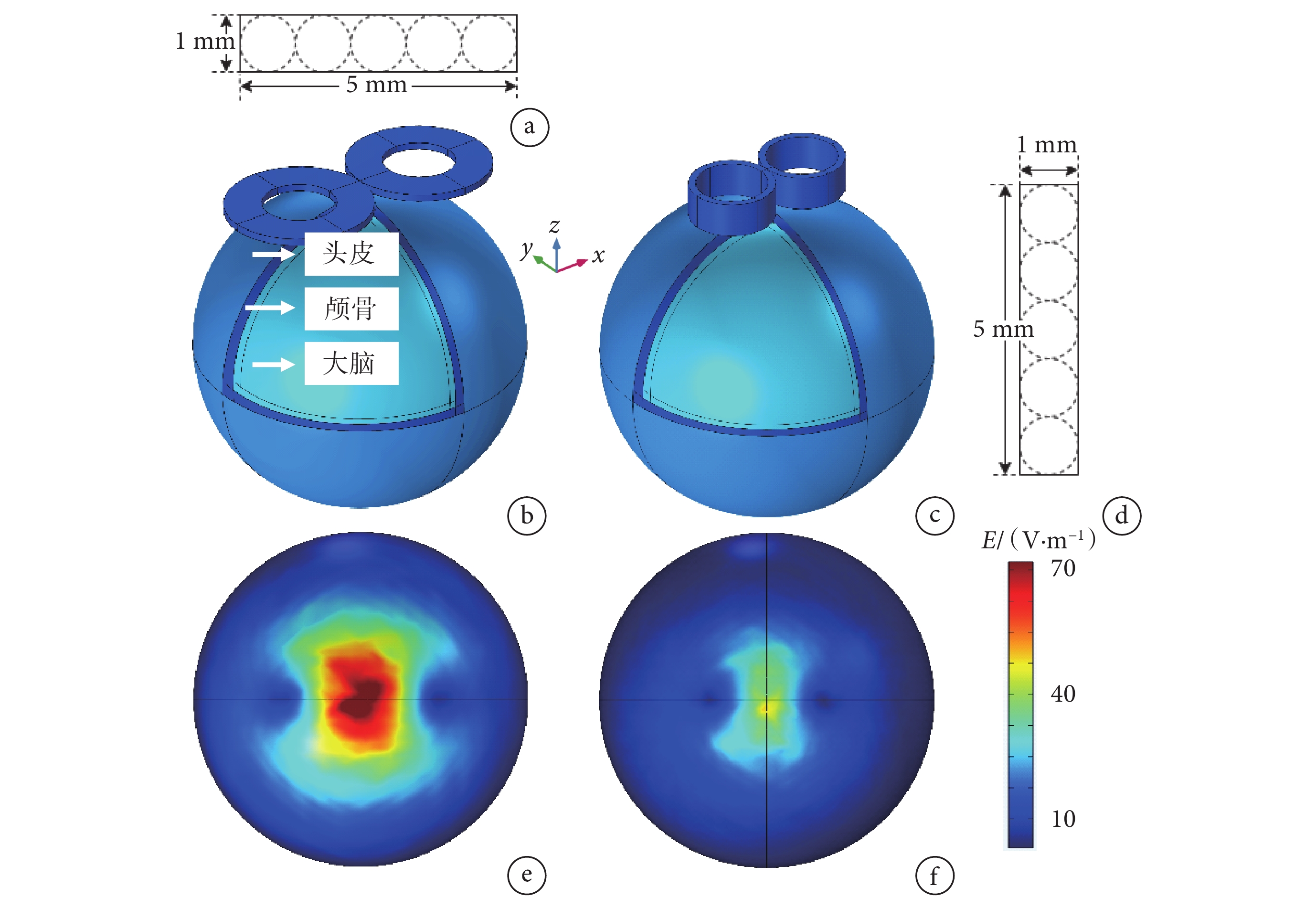 圖1
橫向和縱向繞制8字形線圈模型及感應電場云圖
圖1
橫向和縱向繞制8字形線圈模型及感應電場云圖
a. 橫向繞制線圈軸向截面;b. 橫向繞制線圈模型;c. 縱向繞制線圈模型;d. 縱向繞制線圈軸向截面;e. 橫向繞制線圈感應電場云圖;f. 縱向繞制線圈感應電場云圖
Figure1. 8-shaped coil model and induced electric field distribution of transverse and longitudinal winding coilsa. transverse winding coil axial section; b. transverse winding coil model; c. longitudinal winding coil model; d. longitudinal winding coil axial section; e. induced electric field distribution of transverse winding coil; f. induced electric field distribution of longitudinal winding coil
8字形線圈由兩個圓形線圈相切組成,如圖1b所示,每個圓形線圈內半徑5 mm,外半徑10 mm,線圈模型軸向截面設置如圖1a所示的1 mm×5 mm的矩形,匝數為5,圖中虛線表示實際導線,直徑為1 mm,沿x-y平面上排列(橫向繞制)。線圈置于頭皮上1 mm處,如圖1b~c所示。材料設置為銅,選用常規單元大小劃分網格。
1.3 性能評價指標
本文同時就磁刺激3個性能指標進行仿真研究。刺激強度即皮層表面最大感應電場強度  ,感應電場在腦內衰減很大,為保證刺激的有效性,皮質表層處的電場強度應滿足最小閾值,即100 V·m?1。刺激深度一般定義為皮層表面
,感應電場在腦內衰減很大,為保證刺激的有效性,皮質表層處的電場強度應滿足最小閾值,即100 V·m?1。刺激深度一般定義為皮層表面  所在位置與皮層下電場強度為
所在位置與皮層下電場強度為  一半處的最長距離,即
一半處的最長距離,即  。
。 越大,表明磁場穿透能力越強。聚焦性指的是皮層處大于
越大,表明磁場穿透能力越強。聚焦性指的是皮層處大于  一半的面積,即
一半的面積,即  。
。 越小聚焦性越好。
越小聚焦性越好。 的計算公式如下[26]:
的計算公式如下[26]:
 |
其中, 是大腦層內等于或大于最大電場
是大腦層內等于或大于最大電場 一半的區域體積。
一半的區域體積。
2 仿真結果
向8字形線圈內通入頻率為2 500 Hz、幅值為5 000 A的電流[27],左側線圈電流方向為逆時針,右側線圈電流方向為順時針。
2.1 不同繞制方式的仿真結果
為探究匝數相同時不同線圈繞制方式對線圈性能的影響,建立一個縱向纏繞的8字形線圈模型,截面同樣為1 mm×5 mm的矩形,匝數設置為5,虛線為實際導線,直徑為1 mm。材料設置為銅,選用常規單元大小劃分網格。匝數相同的情況下,縱向和橫向繞制的線圈外徑差別較大,其余參數不變。兩種繞制方式仿真結果見表2。相較于橫向繞制的線圈,縱向繞制的線圈 降低了43.12%,
降低了43.12%, 降低了24.04%,但
降低了24.04%,但 縮小了41.11%。圖1e~f分別為橫向和縱向繞制感應電場云圖。結果表明,縱向纏繞的線圈比橫向纏繞的線圈聚焦性好,但卻犧牲了刺激強度和深度。
縮小了41.11%。圖1e~f分別為橫向和縱向繞制感應電場云圖。結果表明,縱向纏繞的線圈比橫向纏繞的線圈聚焦性好,但卻犧牲了刺激強度和深度。
2.2 不同半徑仿真結果
基于1.2節建立的5匝8字形線圈模型,改變線圈內半徑,分別取值3、4、5、6、7 mm進行模擬,結果見表3。與半徑3 mm相比,半徑為7 mm時, 增大了57.56%,
增大了57.56%, 增大了24.32%,
增大了24.32%, 增大了62.43%。結果表明,隨著線圈內半徑的增大,
增大了62.43%。結果表明,隨著線圈內半徑的增大, 、
、 和
和  的值都越來越大,即刺激強度和深度越來越大,但聚焦性越來越差。
的值都越來越大,即刺激強度和深度越來越大,但聚焦性越來越差。
2.3 不同匝數仿真結果
同樣基于1.2節建立的內半徑5 mm的8字形線圈模型,依次增加線圈匝數至10匝,每增加一匝,線圈外半徑也隨之增加1 mm。與5匝線圈相比, 增大了88.23%,
增大了88.23%, 增大了32.64%,
增大了32.64%, 增大了72.90%。具體結果見表4。結果表明,隨著線圈匝數的增加,
增大了72.90%。具體結果見表4。結果表明,隨著線圈匝數的增加, 、
、 和
和  的值都越來越大,即刺激強度和深度越來越大,但聚焦性越來越差。
的值都越來越大,即刺激強度和深度越來越大,但聚焦性越來越差。
3 線圈設計優化及仿真
與臨床TMS一樣,面向鴿子機器人的磁刺激性能指標同樣包括刺激強度、深度及聚焦性三個方面。經實際測量,顱骨表面積只有大約10 cm2,運動控制功能核團深度位于顱骨表面下7~8 mm。因此線圈設計的原則是在保證一定刺激強度和深度的基礎上更關注聚焦性能的提升。
3.1 線圈的初步設計
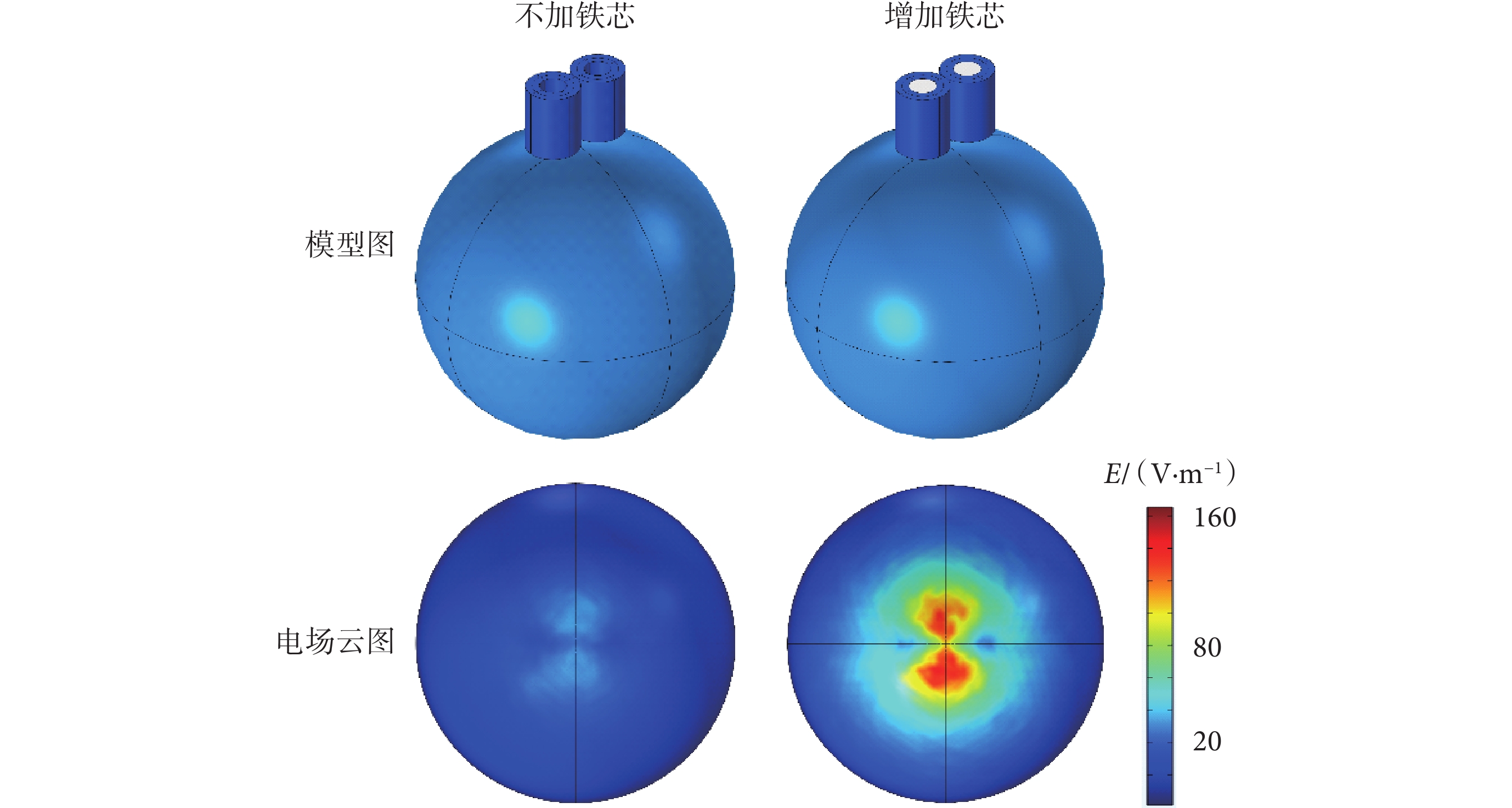
依據仿真實驗結果,線圈半徑越小,聚焦性越好,但半徑太小會導致制作難度增大,因此將線圈半徑設定為2 mm。在繞制方式上選用聚焦性更強的縱向纏繞,但這種方式會導致刺激強度和深度減弱。為了平衡三者之間的關系,獲得盡可能好的刺激性能,繞制匝數增加至10,增加一層(匝)橫向繞制線圈,并在每個線圈中間加入半徑2 mm的等高鐵芯。增加鐵芯前后仿真結果對比見表5。與不加鐵芯相比,增加鐵芯后,聚焦面積沒有明顯變化,但 明顯增強,達到166.67 V·m?1,超過閾值。圖2為增加鐵芯前后感應云圖。
明顯增強,達到166.67 V·m?1,超過閾值。圖2為增加鐵芯前后感應云圖。
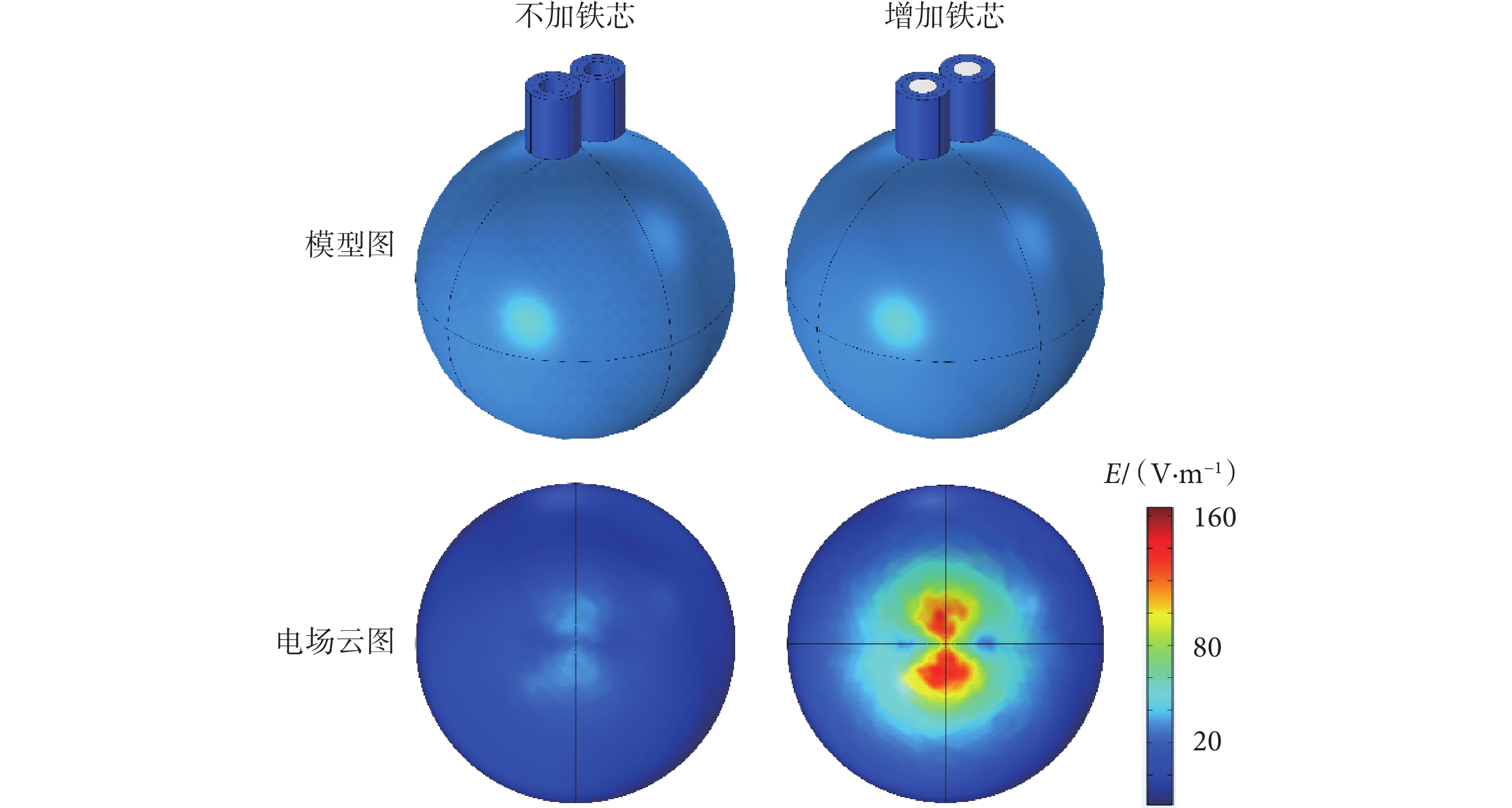 圖2
線圈中心加鐵芯模型及感應云圖
Figure2.
Model of coil center with iron core and its electric field distribution
圖2
線圈中心加鐵芯模型及感應云圖
Figure2.
Model of coil center with iron core and its electric field distribution
在此基礎上,進一步研究了不同擺放角度對線圈性能的影響。以線圈底面和x軸的夾角為參考,向下為負角度,向上為正角度。仿真數據見表6。結果表明,線圈與x軸夾角越小,刺激強度和聚焦性就越強。在–15°時, 達到了213.92 V·m?1,遠遠超過閾值,刺激強度明顯增大,聚焦面積縮小至28.75 mm2,聚焦性能明顯提升。
達到了213.92 V·m?1,遠遠超過閾值,刺激強度明顯增大,聚焦面積縮小至28.75 mm2,聚焦性能明顯提升。
3.2 場的衰減
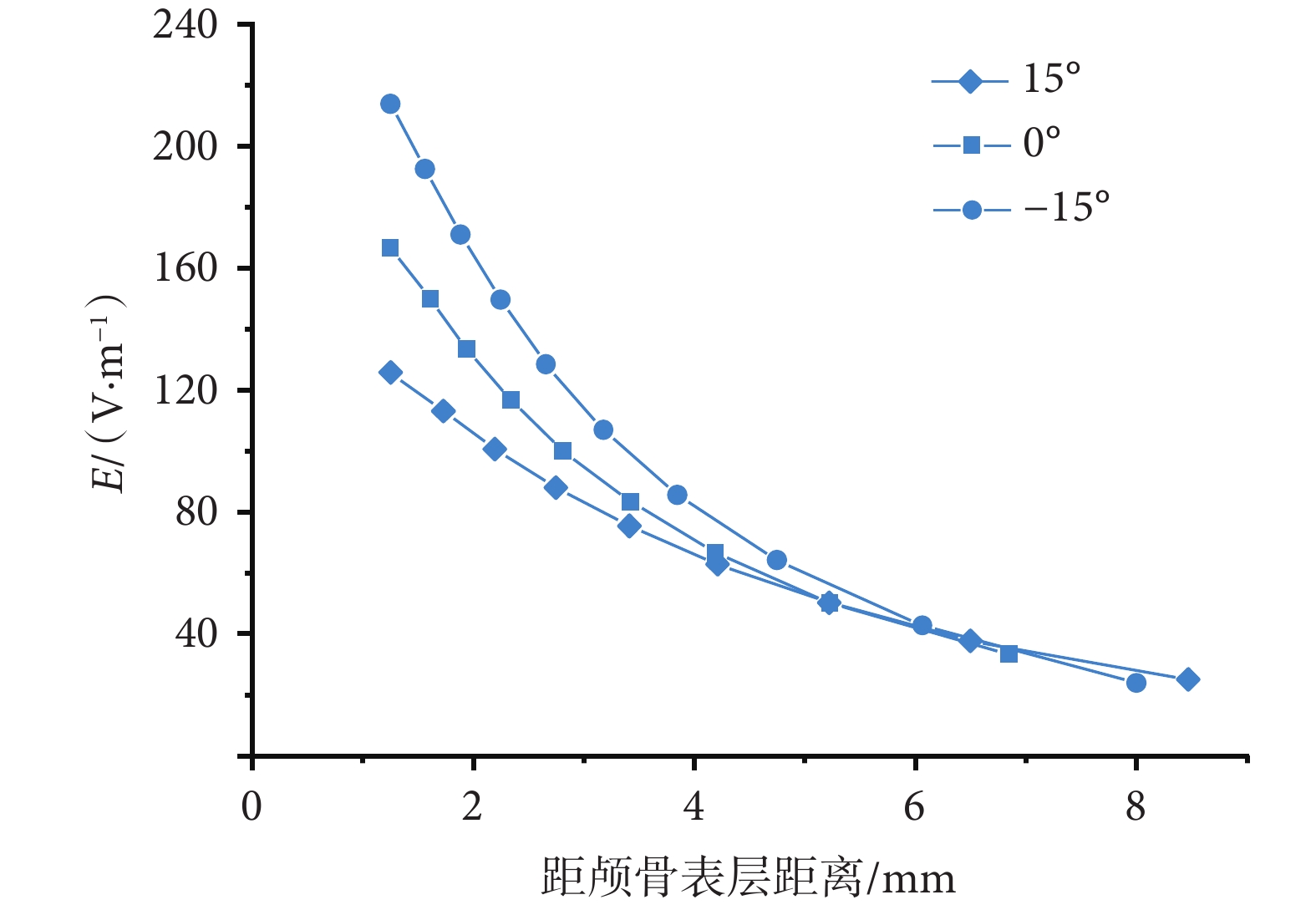
隨著線圈底面與x軸夾角的減小,電場強度明顯增加。但感應電場在腦內衰減很大,為保證刺激的有效性,選取擺放角度分別為–15°、0°與15°的線圈模型計算其衰減情況。結果如圖3所示,線圈底面與x軸夾角越小,感應電場衰減速度越快,選取的三種線圈模型中,–15°線圈電場衰減速度最快。
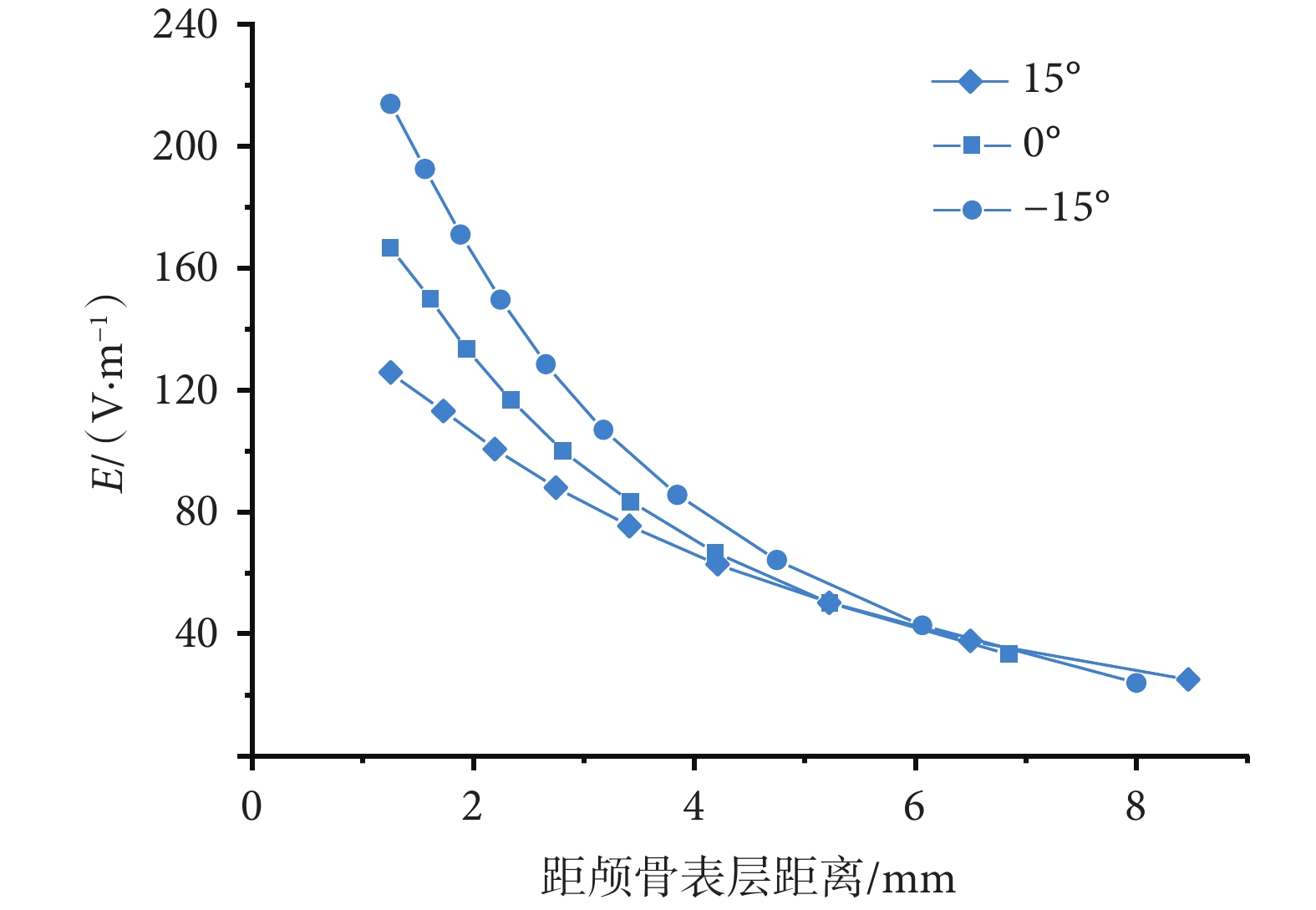 圖3
不同角度擺放線圈電場衰減對比
Figure3.
Electric field attenuation of coils with different angles at different brain depths
圖3
不同角度擺放線圈電場衰減對比
Figure3.
Electric field attenuation of coils with different angles at different brain depths
為進一步了解皮層下不同深度腦層面的電場強度,我們選取聚焦性最好但衰減速度最快的–15°線圈模型進行仿真計算。在線圈中心下大腦層內的x-y平面,每間隔1 mm進行分層分析。在線圈下5 mm,即顱骨表層下2.25 mm處電場強度最大值為149.06 V·m?1;在線圈下7 mm,即顱骨表層下4.25 mm處電場強度最大值小于100 V·m?1,為75.7 V·m?1;在線圈下9 mm,即顱骨表層下7 mm左右的平面上,最大電場衰減到40.72 V·m?1。
4 動物實驗
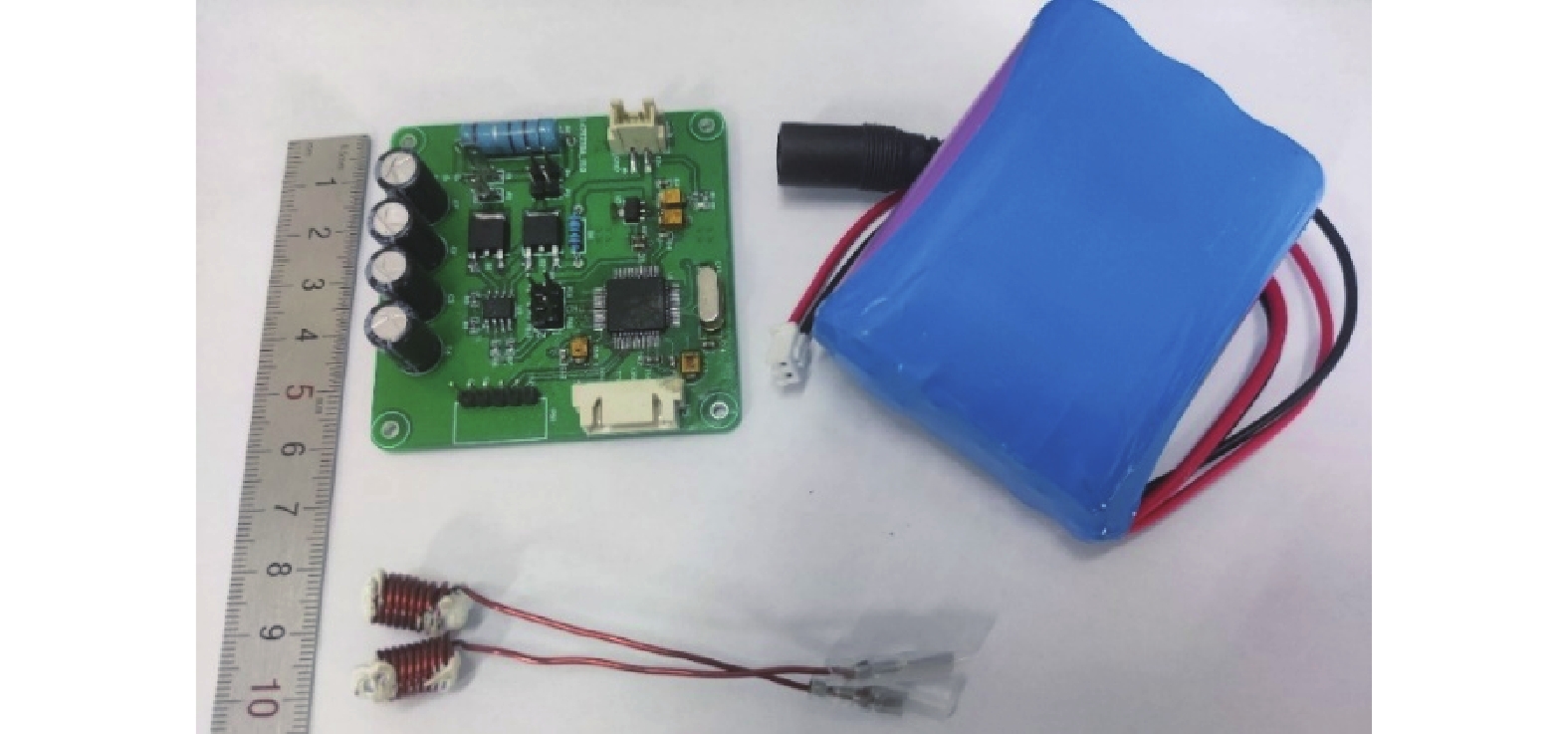
實驗用鴿子由山東科技大學機器人中心自行養殖,磁刺激裝置和線圈為實驗室自制(見圖4)。在鴿子清醒狀態下,將表面電極貼片貼于鴿子腿部,用實驗室自制的肌電采集裝置進行信號采集。將自制線圈分別置于鴿子頭部及肌電采集側腿部上方肌肉處,線圈用線徑1 mm的漆包銅線繞制,縱向10層,橫向2層,加鐵芯,角度為–15°。實驗在屏蔽室內進行。用自制小型便攜式磁刺激裝置施加刺激,整個裝置體積較小,刺激器輸出為可調脈沖電流,刺激時長均為10 s。實驗在屏蔽室內進行,線圈作絕緣處理,除線圈外其余部分均用錫紙包裹以防電磁干擾。
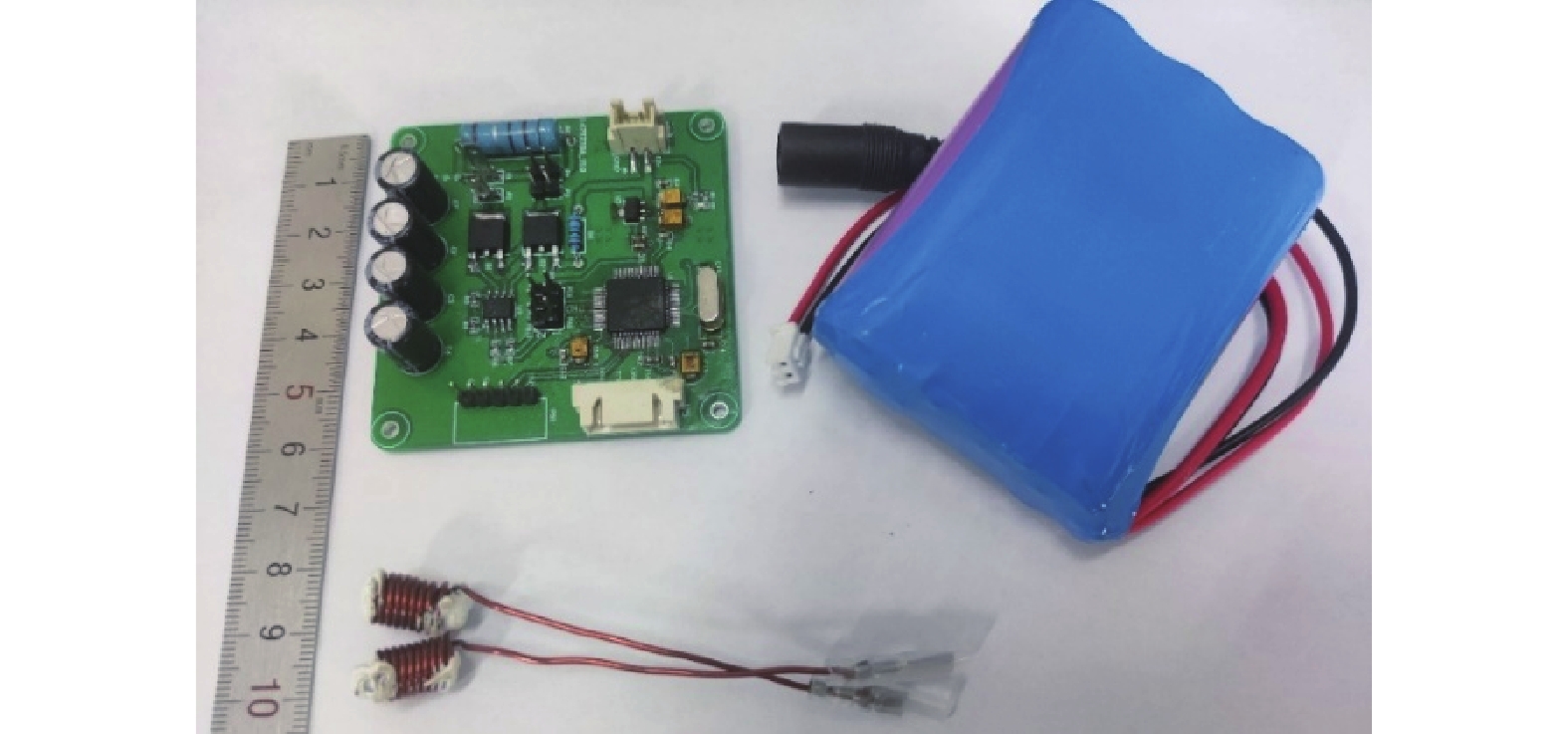 圖4
實驗室自制磁刺激裝置及線圈實物
Figure4.
Self-made magnetic stimulation device and coil
圖4
實驗室自制磁刺激裝置及線圈實物
Figure4.
Self-made magnetic stimulation device and coil
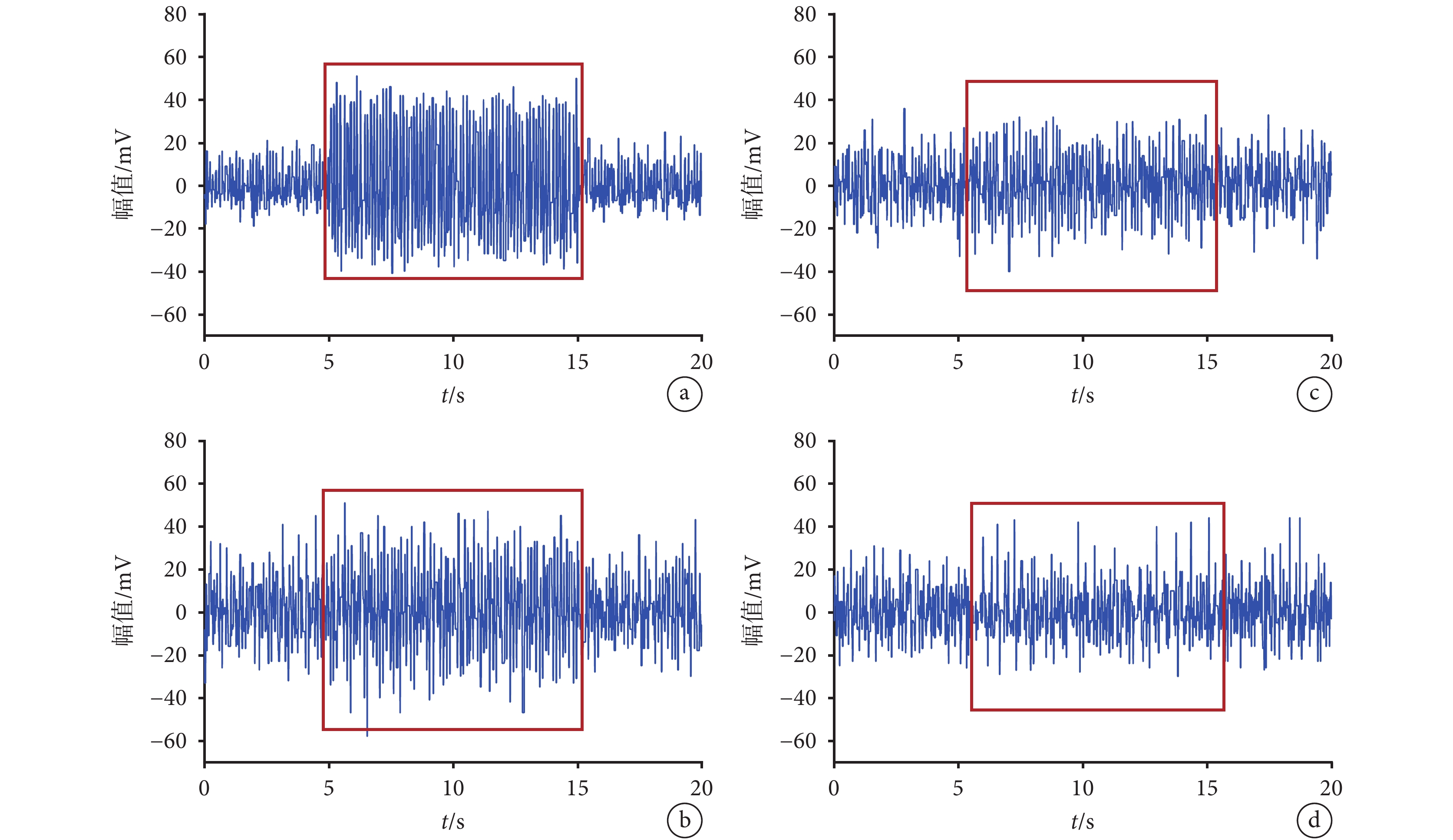
據法拉第感應電磁定律:感應電場的強度為磁通密度 的時間變化率的負值,而磁通密度主要與電流大小和距離位置有關,因此忽略電壓的影響。刺激器與家鴿距離較遠,且運行時無明顯聲響,從刺激器接出線圈,待采集到穩定的家鴿肌電信號后開始刺激,盡量貼近靶區,但不產生接觸。結果如圖5所示。刺激器輸出參數為1 Hz、40 A時,刺激坐骨神經,肌電放電幅度由刺激前的20.23 mV增大到50.04 mV,增大了147.36%(見圖5a)。將輸出頻率調至10 Hz,此時電流強度為33 A,刺激坐骨神經之前肌電放電幅度為24.05 mV,刺激后肌電幅度為30.35 mV,增大了26.20%(見圖5b)。將輸出頻率調至20 Hz,此時電流強度28 A,刺激坐骨神經之前肌電放電幅度為20.16 mV,刺激后肌電幅度為23.79 mV,增大了18.00%(見圖5c)。刺激器輸出頻率為1 Hz、40 A時,刺激家鴿頭部,肌電放電幅度由刺激前的19.96 mV增大到22.61 mV,增大了13.30%(見圖5d)。磁刺激停止時,肌電反應隨即消失,未觀測到鴿子腿部有抽搐動作,可能與刺激時間短、刺激強度小有關。
的時間變化率的負值,而磁通密度主要與電流大小和距離位置有關,因此忽略電壓的影響。刺激器與家鴿距離較遠,且運行時無明顯聲響,從刺激器接出線圈,待采集到穩定的家鴿肌電信號后開始刺激,盡量貼近靶區,但不產生接觸。結果如圖5所示。刺激器輸出參數為1 Hz、40 A時,刺激坐骨神經,肌電放電幅度由刺激前的20.23 mV增大到50.04 mV,增大了147.36%(見圖5a)。將輸出頻率調至10 Hz,此時電流強度為33 A,刺激坐骨神經之前肌電放電幅度為24.05 mV,刺激后肌電幅度為30.35 mV,增大了26.20%(見圖5b)。將輸出頻率調至20 Hz,此時電流強度28 A,刺激坐骨神經之前肌電放電幅度為20.16 mV,刺激后肌電幅度為23.79 mV,增大了18.00%(見圖5c)。刺激器輸出頻率為1 Hz、40 A時,刺激家鴿頭部,肌電放電幅度由刺激前的19.96 mV增大到22.61 mV,增大了13.30%(見圖5d)。磁刺激停止時,肌電反應隨即消失,未觀測到鴿子腿部有抽搐動作,可能與刺激時間短、刺激強度小有關。
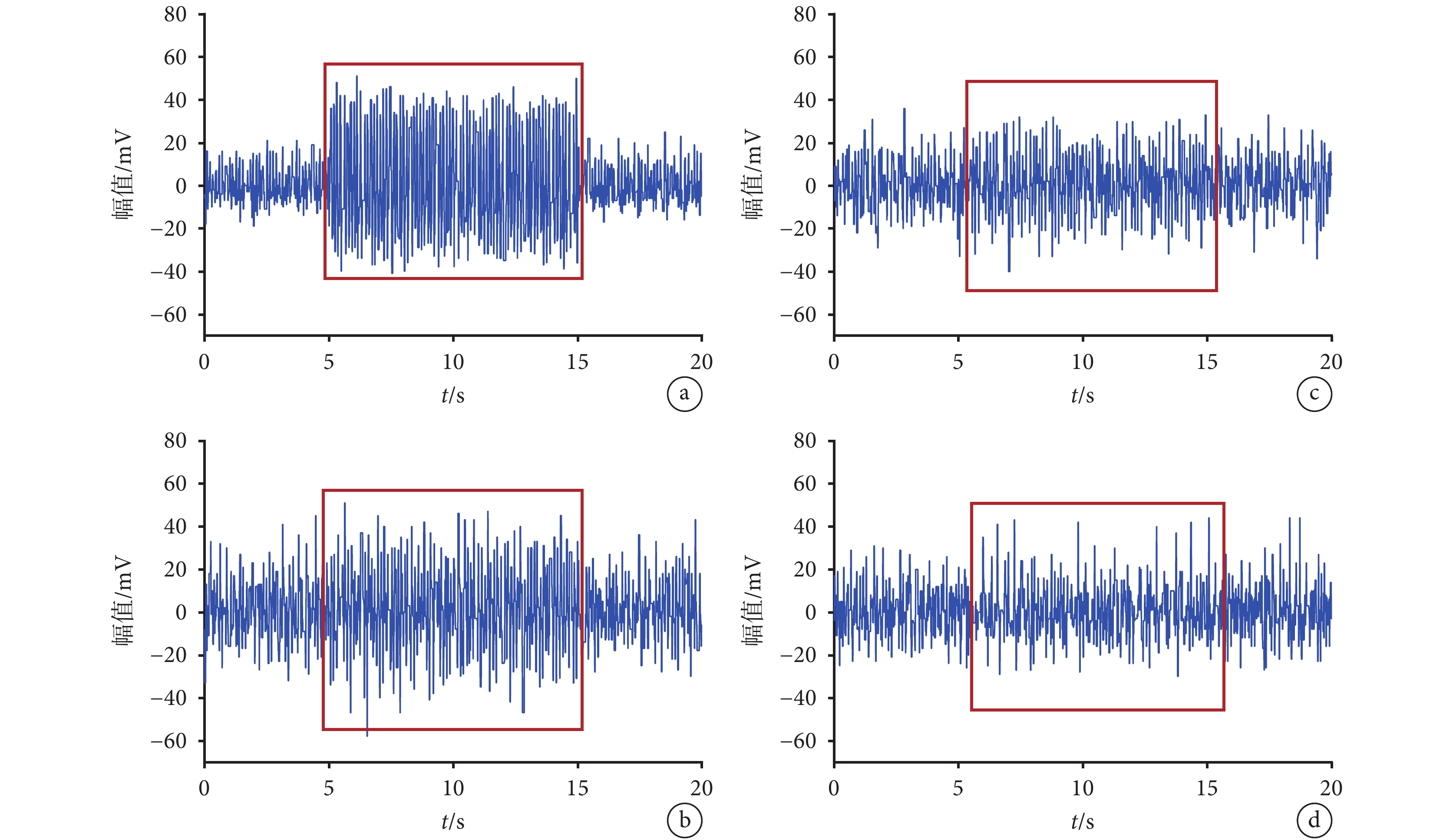 圖5
磁刺激坐骨神經和腦部時的肌電反應
圖5
磁刺激坐骨神經和腦部時的肌電反應
a. 1 Hz、40 A刺激坐骨神經時的肌電;b 10 Hz、33 A刺激坐骨神經時的肌電;c. 20 Hz、28 A刺激坐骨神經時的肌電;d. 1 Hz、40 A刺激腦部時的肌電
Figure5. Electromyographic response to magnetic stimulation of sciatic nerve and braina. electromyography when stimulating sciatic nerve at 1 Hz and 40 A; b. electromyography when stimulating sciatic nerve at 10 Hz and 33 A; c. electromyography when stimulating sciatic nerve at 20 Hz and 28 A; d. electromyography when stimulating brain at 1 Hz and 40 A
5 討論與結論
目前,磁刺激廣泛用于臨床治療神經及精神系統疾病。目前尚未見到磁刺激用于動物機器人運動控制的研究報道。磁刺激的核心部分是線圈。與人腦相比,小動物腦核團深度較淺,表面積更小,一般約為幾個平方毫米,目前很難將磁刺激聚焦在如此小的范圍內,無法進行精準的位點刺激,而且用于小動物的線圈需要進行小型化設計,為了產生有效的磁場,勢必要增加頻率和電流,減小電阻,這會導致線圈過熱以及機械應力問題[28]。因此,用于臨床的人用磁刺激線圈研究很多,并且已經商業化,而用于小動物的線圈研究很少。本文針對動物機器人磁刺激運動控制進行了初步的嘗試和探索,重點關注核心組件——磁刺激線圈的設計。
行TMS時,刺激線圈在腦內激發的感應電場呈渦流形態,由中心向四周發散,因此很難對某一靶點進行聚焦刺激。刺激強度或深度增大,聚焦性會隨之降低,反之亦然。因此,TMS的三個刺激性能互相矛盾。線圈設計的關鍵在于盡可能平衡三者之間的關系,在確定刺激深度和刺激強度的基礎上最小化聚焦面積。Rastogi等[29]在小鼠頭部模型上研究了slinky、V形、Helmholtz、solenoid、Halo、8字形、圓形7種線圈的磁刺激性能。其中,Halo線圈聚集性最差,而其刺激深度最大,等于或大于最大感應電場閾值125 V·m?1的深度可以達到9.2 mm;slinky聚焦性最好,線圈刺激深度最小,等于或大于最大感應電場閾值125 V·m?1的深度只有1.5 mm。與上述兩種線圈相比,半徑大約13 mm的8字形線圈聚焦性和刺激深度(等于或大于最大感應電場閾值125 V·m?1的深度為4.7 mm)都介于兩者之間,表現更為均衡。基于此,本文選擇了8字形線圈作為研究對象,通過仿真分析線圈的大小、繞制方法、擺放角度等因素對刺激強度、深度及聚焦性的影響,提出了磁刺激線圈的設計方案。該方案在兼顧一定的刺激強度和深度的基礎上,重點關注聚焦性的提升。文中設計的8字形線圈 達到了213.92 V·m?1,遠遠超過了閾值,最小聚焦面積28.75 mm2,相較于臨床使用的線圈聚焦性有了明顯提升。雖然相對于鴿子機器人磁刺激運動控制這個目標來說還遠不夠理想,但本研究對小動物線圈設計及后期實際制作具有實用的參考價值。
達到了213.92 V·m?1,遠遠超過了閾值,最小聚焦面積28.75 mm2,相較于臨床使用的線圈聚焦性有了明顯提升。雖然相對于鴿子機器人磁刺激運動控制這個目標來說還遠不夠理想,但本研究對小動物線圈設計及后期實際制作具有實用的參考價值。
實驗室自制的小型磁刺激系統輸出頻率范圍為1~20 Hz,通過線圈的電流強度在28~40 A之間,雖然性能遠不如商業化的磁刺激儀,但實驗結果表明,該刺激系統可以驅動本文所設計的線圈有效調控腦及坐骨神經功能。輸出頻率越小,通過線圈的電流強度越大,由此產生的磁場及誘導的感應電場強度越大,磁刺激引起的肌電反應越強。本次實驗中TMS不如直接刺激坐骨神經效果明顯,原因可能是磁刺激系統性能有限,坐骨神經直接控制肌肉功能,而經顱刺激無法準確進行腦核團定位。后期通過改進系統設計,提高輸出頻率和電流強度,可以有效提升TMS的效果。
磁刺激過程中,線圈溫度會上升,電阻隨之增大,電容放電時因線圈電阻增大,輸出電流下降,導致磁刺激效果減弱,而且線圈過熱會導致被刺激部位燙傷。本文仿真使用的線圈模型由直徑1 mm的銅導線繞制,向線圈內通入的電流頻率為2 500 Hz,幅值為5 000 A。仿真分析的目的是為線圈實際設計制作提供理論指導和依據,因此并未考慮線圈的載流量限制及發熱等實際問題。動物實驗時,自制的小型磁刺激系統輸出的電流參數遠小于仿真時使用的參數,而且刺激時間短,線圈發熱等問題不明顯。后期磁刺激系統性能提升后,制作線圈實物時需要在線圈的材料、半徑等方面進行設計改進,以減弱刺激過程中的線圈過熱問題。鄭志宇等[30]設計了一個針對SD大鼠的圓形TMS線圈及一套完整的液體冷卻系統,動物實驗證明該冷卻裝置可以在長時間高頻重復刺激時將線圈表面溫度控制在45 ℃以下。如何快速冷卻線圈、防止線圈溫度過高也是動物機器人磁刺激控制必須解決的一個問題,有待于進一步研究。
本文面向動物機器人磁刺激運動控制進行了初次嘗試和探索,通過仿真計算分析,提出了初步的線圈設計方案,制作了簡單的線圈實物并進行了初步的實驗驗證。雖然線圈性能還不完善,但是本研究為后續線圈設計改進提供了理論和實驗依據,為面向動物機器人的磁刺激系統設計改進和磁刺激運動控制實施等奠定了初步的理論和實驗基礎。
重要聲明
利益沖突聲明:本文全體作者均聲明不存在利益沖突。
作者貢獻聲明:許孟華負責線圈仿真分析以及論文撰寫、修訂。蒲鑫負責磁刺激器調試。常銘負責動物實驗手術。宋陽負責肌電信號分析。馬福喆負責肌電信號采集。槐瑞托負責動物實驗指導。楊俊卿負責硬件平臺指導與維護。常輝負責肌電信號分析指導。邵峰負責動物實驗方法及動物實驗倫理指導。汪慧負責制定研究方案及研究計劃,進行實驗設計及信號分析指導以及論文修訂審閱。
倫理聲明:本研究通過了山東本明生物科技股份有限公司動物倫理委員會的審批(批文編號:000851)。
0 引言
隨著腦機接口技術及人工智能研究的廣泛興起,在災難救援、軍事領域有著深遠應用前景的動物機器人日益成為世界前沿科技的關注熱點,陸續研發出機器人鼠[1-3]、機器人昆蟲[4-5]、機器人鴿[6-7]、機器人海龜[8]、機器人壁虎[9]、機器人魚[10-11]等。所謂動物機器人是人類通過生物控制技術施加干預信號調控動物的生物行為從而實現人類操縱的動物[11]。所使用的生物控制技術以電刺激為主,此外還有光刺激、磁刺激等。電刺激技術需要植入電極,優點是刺激點定位準確,控制效果好。缺點是侵入式刺激對腦組織造成損傷,容易引發腦內感染,而且再生的神經組織包裹植入的微電極,會導致動物機器人對電刺激響應的靈敏度日漸下降甚至消失[6]。
無創刺激可以避免上述問題的出現。2018年,燕山大學彭勇教授團隊[11]研發了一種用于鯉魚機器人的光刺激裝置及光控實驗方法,該方法不損傷腦組織,在暗光環境下可以控制鯉魚機器人前進及轉向運動,成功率在50%~80%,這表明無創刺激在動物機器人運動控制方面是可行的。
磁刺激也是一種非常重要的無創刺激技術。1985年,Baker等[12]提出基于圓形線圈的經顱磁刺激技術(transcranial magnetic stimulation,TMS)。時變電流流入線圈,產生高強度時變脈沖磁場,從而在組織內產生感應電場和感生電流,可興奮組織產生動作電位。相較于電刺激及光刺激,磁刺激無創、無痛,磁場通過骨骼、脂肪等組織時幾乎沒有衰減,可以穿過體表到達大腦深處刺激中樞神經系統,有效調控神經功能。研究表明,單脈沖及雙脈沖磁刺激均可使皮層神經元去極化產生動作電位,在大腦皮層運動區產生動作誘發電位。重復性TMS可以調節皮層組織的興奮性[13]。近年來TMS已經成為臨床治療抑郁癥、阿爾茨海默病、帕金森病、腦卒中后遺癥等十分重要的手段。
目前,國內外關于磁刺激的研究層出不窮[14-15],但主要關注點在臨床治療方面,面向對象為人。截至目前,尚未見到將TMS用于動物機器人運動控制的研究報道。作為非侵入型腦刺激領域里最主要的技術工具之一,我們推測,具有神經調控功能的磁刺激也可以控制動物機器人的運動行為。
TMS性能有三個重要評價指標,分別是刺激強度、刺激深度和聚焦性。這三個指標都和線圈設計有密切關系,磁刺激線圈是TMS的核心部分。最早出現的是圓形線圈[12],它刺激范圍大,聚焦度差。1988年,Ueno等[16]提出了8字型線圈,它由兩個共面反向電流的圓形線圈組成,其聚焦性優于圓形線圈,刺激分辨率高,但刺激深度不夠理想。1995年,Ren等[17]設計了slinky線圈,在8字形線圈基礎上在其垂直面上增加一個線圈,線圈中心的電場增強,但聚焦度不夠。2002年,Roth等[18]發明了H形線圈,它的刺激深度優于8字形線圈,但聚焦性差。此外,使用輔助手段,例如高磁導率的鐵芯[19]和屏蔽版[20]等也可以優化線圈的電磁場分布。
與臨床使用的線圈相比,應用于小動物的磁刺激線圈刺激深度較淺,但對聚焦性的要求更高,目前相關研究相對較少,而且多面向嚙齒類動物。2005年,Zheng等[21]開展了TMS大鼠真實頭模型感應電場分布研究,并給出了適合大鼠的線圈形狀與參數。2009年,Salvador等[19]開展了針對小動物磁刺激線圈幾何形狀、尺寸和方向影響的建模研究。2018年,Selvaraj等[22]設計了針對小鼠的經顱磁刺激器和聚焦線圈。2021年,Carmona等[23]研發了針對小動物的高聚焦性碳鋼芯線圈。
本文就動物機器人的磁刺激控制進行初步嘗試和探索。針對鴿子機器人的運動控制,建立鴿子頭部模型,選用聚焦性最好的8字形線圈,通過有限元仿真分析線圈的大小、繞制方法、擺放角度等因素對刺激強度、深度及聚焦性的影響,提出磁刺激線圈設計方案,做出簡單實物,進行了初步的實驗驗證,為后續實用性線圈優化改進提供理論指導,為面向動物機器人的磁刺激系統設計改進、磁刺激靶區定位、鴿子機器人磁刺激控制實施等奠定初步的理論和實驗基礎。
1 方法
1.1 電磁場理論
Maxwell方程組是分析電磁場的基礎,由Maxwell方程組又推導出畢奧-薩伐爾定律。單匝線圈中電流為 ,任一電流元 在空間某點產生的磁感應強度為 ,在刺激靶區任一點沿著線圈閉合電流線C產生的磁場強度B可由式(1)表示:
|
其中, 是被刺激區域磁導率(單位為H·m?1),R 是線圈上的電流元到被刺激點位的距離。依據Faraday電磁感應定律,線圈產生的時變磁場B在空間中可以感應出一定強度的電場E,可通過Maxwell方程來表示,如式(2)所示:
|
若把通入變化電流的線圈置于大腦周圍,大腦可以看作是個封閉的導體,腦組織的電導率是,在感應電場作用下,腦組織中產生的感生電流密度可以表示為式(3):
|
感應電流密度與感應電場的強度成正比,而磁場強度的變化率決定了感應電場。
1.2 建立模型
利用有限元仿真軟件COMSOL建立頭部和線圈模型。本文以家鴿為研究對象。由于生物體內電導率及組織和頭骨厚度并不均勻,且個體間也有差異,不易于建立真實模型,故采用Rush的均勻三層同心球模型[24]。該模型雖然簡單,但對磁刺激線圈的刺激參數,例如聚焦性以及刺激深度等評估具有非常重要的參考意義。經實測6只家鴿,獲知其頭部寬度平均大約4 cm。結合家鴿生理解剖知識設置結構參數,第一層由皮膚、淺筋膜、枕額肌與腱膜組成,稱為頭皮層,厚度設置為1.75 mm;第二層將腦脊液與顱骨合為一層,稱為顱骨層,厚度設置為1.25 mm;第三層將灰質和白質合在一起,稱為大腦層。三層頭模型的結構和材料屬性如表1所示。將各層的相對介電常數均設置為1.0[25]。圖1b為簡化三層同心球模型示意圖。
圖1
橫向和縱向繞制8字形線圈模型及感應電場云圖
a. 橫向繞制線圈軸向截面;b. 橫向繞制線圈模型;c. 縱向繞制線圈模型;d. 縱向繞制線圈軸向截面;e. 橫向繞制線圈感應電場云圖;f. 縱向繞制線圈感應電場云圖
Figure1. 8-shaped coil model and induced electric field distribution of transverse and longitudinal winding coilsa. transverse winding coil axial section; b. transverse winding coil model; c. longitudinal winding coil model; d. longitudinal winding coil axial section; e. induced electric field distribution of transverse winding coil; f. induced electric field distribution of longitudinal winding coil
8字形線圈由兩個圓形線圈相切組成,如圖1b所示,每個圓形線圈內半徑5 mm,外半徑10 mm,線圈模型軸向截面設置如圖1a所示的1 mm×5 mm的矩形,匝數為5,圖中虛線表示實際導線,直徑為1 mm,沿x-y平面上排列(橫向繞制)。線圈置于頭皮上1 mm處,如圖1b~c所示。材料設置為銅,選用常規單元大小劃分網格。
1.3 性能評價指標
本文同時就磁刺激3個性能指標進行仿真研究。刺激強度即皮層表面最大感應電場強度 ,感應電場在腦內衰減很大,為保證刺激的有效性,皮質表層處的電場強度應滿足最小閾值,即100 V·m?1。刺激深度一般定義為皮層表面 所在位置與皮層下電場強度為 一半處的最長距離,即 。 越大,表明磁場穿透能力越強。聚焦性指的是皮層處大于 一半的面積,即 。 越小聚焦性越好。 的計算公式如下[26]:
|
其中,是大腦層內等于或大于最大電場一半的區域體積。
2 仿真結果
向8字形線圈內通入頻率為2 500 Hz、幅值為5 000 A的電流[27],左側線圈電流方向為逆時針,右側線圈電流方向為順時針。
2.1 不同繞制方式的仿真結果
為探究匝數相同時不同線圈繞制方式對線圈性能的影響,建立一個縱向纏繞的8字形線圈模型,截面同樣為1 mm×5 mm的矩形,匝數設置為5,虛線為實際導線,直徑為1 mm。材料設置為銅,選用常規單元大小劃分網格。匝數相同的情況下,縱向和橫向繞制的線圈外徑差別較大,其余參數不變。兩種繞制方式仿真結果見表2。相較于橫向繞制的線圈,縱向繞制的線圈降低了43.12%,降低了24.04%,但縮小了41.11%。圖1e~f分別為橫向和縱向繞制感應電場云圖。結果表明,縱向纏繞的線圈比橫向纏繞的線圈聚焦性好,但卻犧牲了刺激強度和深度。
2.2 不同半徑仿真結果
基于1.2節建立的5匝8字形線圈模型,改變線圈內半徑,分別取值3、4、5、6、7 mm進行模擬,結果見表3。與半徑3 mm相比,半徑為7 mm時, 增大了57.56%, 增大了24.32%, 增大了62.43%。結果表明,隨著線圈內半徑的增大,、 和 的值都越來越大,即刺激強度和深度越來越大,但聚焦性越來越差。
2.3 不同匝數仿真結果
同樣基于1.2節建立的內半徑5 mm的8字形線圈模型,依次增加線圈匝數至10匝,每增加一匝,線圈外半徑也隨之增加1 mm。與5匝線圈相比, 增大了88.23%, 增大了32.64%, 增大了72.90%。具體結果見表4。結果表明,隨著線圈匝數的增加,、 和 的值都越來越大,即刺激強度和深度越來越大,但聚焦性越來越差。
3 線圈設計優化及仿真
與臨床TMS一樣,面向鴿子機器人的磁刺激性能指標同樣包括刺激強度、深度及聚焦性三個方面。經實際測量,顱骨表面積只有大約10 cm2,運動控制功能核團深度位于顱骨表面下7~8 mm。因此線圈設計的原則是在保證一定刺激強度和深度的基礎上更關注聚焦性能的提升。
3.1 線圈的初步設計
依據仿真實驗結果,線圈半徑越小,聚焦性越好,但半徑太小會導致制作難度增大,因此將線圈半徑設定為2 mm。在繞制方式上選用聚焦性更強的縱向纏繞,但這種方式會導致刺激強度和深度減弱。為了平衡三者之間的關系,獲得盡可能好的刺激性能,繞制匝數增加至10,增加一層(匝)橫向繞制線圈,并在每個線圈中間加入半徑2 mm的等高鐵芯。增加鐵芯前后仿真結果對比見表5。與不加鐵芯相比,增加鐵芯后,聚焦面積沒有明顯變化,但明顯增強,達到166.67 V·m?1,超過閾值。圖2為增加鐵芯前后感應云圖。
圖2
線圈中心加鐵芯模型及感應云圖
Figure2.
Model of coil center with iron core and its electric field distribution
在此基礎上,進一步研究了不同擺放角度對線圈性能的影響。以線圈底面和x軸的夾角為參考,向下為負角度,向上為正角度。仿真數據見表6。結果表明,線圈與x軸夾角越小,刺激強度和聚焦性就越強。在–15°時,達到了213.92 V·m?1,遠遠超過閾值,刺激強度明顯增大,聚焦面積縮小至28.75 mm2,聚焦性能明顯提升。
3.2 場的衰減
隨著線圈底面與x軸夾角的減小,電場強度明顯增加。但感應電場在腦內衰減很大,為保證刺激的有效性,選取擺放角度分別為–15°、0°與15°的線圈模型計算其衰減情況。結果如圖3所示,線圈底面與x軸夾角越小,感應電場衰減速度越快,選取的三種線圈模型中,–15°線圈電場衰減速度最快。
圖3
不同角度擺放線圈電場衰減對比
Figure3.
Electric field attenuation of coils with different angles at different brain depths
為進一步了解皮層下不同深度腦層面的電場強度,我們選取聚焦性最好但衰減速度最快的–15°線圈模型進行仿真計算。在線圈中心下大腦層內的x-y平面,每間隔1 mm進行分層分析。在線圈下5 mm,即顱骨表層下2.25 mm處電場強度最大值為149.06 V·m?1;在線圈下7 mm,即顱骨表層下4.25 mm處電場強度最大值小于100 V·m?1,為75.7 V·m?1;在線圈下9 mm,即顱骨表層下7 mm左右的平面上,最大電場衰減到40.72 V·m?1。
4 動物實驗
實驗用鴿子由山東科技大學機器人中心自行養殖,磁刺激裝置和線圈為實驗室自制(見圖4)。在鴿子清醒狀態下,將表面電極貼片貼于鴿子腿部,用實驗室自制的肌電采集裝置進行信號采集。將自制線圈分別置于鴿子頭部及肌電采集側腿部上方肌肉處,線圈用線徑1 mm的漆包銅線繞制,縱向10層,橫向2層,加鐵芯,角度為–15°。實驗在屏蔽室內進行。用自制小型便攜式磁刺激裝置施加刺激,整個裝置體積較小,刺激器輸出為可調脈沖電流,刺激時長均為10 s。實驗在屏蔽室內進行,線圈作絕緣處理,除線圈外其余部分均用錫紙包裹以防電磁干擾。
圖4
實驗室自制磁刺激裝置及線圈實物
Figure4.
Self-made magnetic stimulation device and coil
據法拉第感應電磁定律:感應電場的強度為磁通密度的時間變化率的負值,而磁通密度主要與電流大小和距離位置有關,因此忽略電壓的影響。刺激器與家鴿距離較遠,且運行時無明顯聲響,從刺激器接出線圈,待采集到穩定的家鴿肌電信號后開始刺激,盡量貼近靶區,但不產生接觸。結果如圖5所示。刺激器輸出參數為1 Hz、40 A時,刺激坐骨神經,肌電放電幅度由刺激前的20.23 mV增大到50.04 mV,增大了147.36%(見圖5a)。將輸出頻率調至10 Hz,此時電流強度為33 A,刺激坐骨神經之前肌電放電幅度為24.05 mV,刺激后肌電幅度為30.35 mV,增大了26.20%(見圖5b)。將輸出頻率調至20 Hz,此時電流強度28 A,刺激坐骨神經之前肌電放電幅度為20.16 mV,刺激后肌電幅度為23.79 mV,增大了18.00%(見圖5c)。刺激器輸出頻率為1 Hz、40 A時,刺激家鴿頭部,肌電放電幅度由刺激前的19.96 mV增大到22.61 mV,增大了13.30%(見圖5d)。磁刺激停止時,肌電反應隨即消失,未觀測到鴿子腿部有抽搐動作,可能與刺激時間短、刺激強度小有關。
圖5
磁刺激坐骨神經和腦部時的肌電反應
a. 1 Hz、40 A刺激坐骨神經時的肌電;b 10 Hz、33 A刺激坐骨神經時的肌電;c. 20 Hz、28 A刺激坐骨神經時的肌電;d. 1 Hz、40 A刺激腦部時的肌電
Figure5. Electromyographic response to magnetic stimulation of sciatic nerve and braina. electromyography when stimulating sciatic nerve at 1 Hz and 40 A; b. electromyography when stimulating sciatic nerve at 10 Hz and 33 A; c. electromyography when stimulating sciatic nerve at 20 Hz and 28 A; d. electromyography when stimulating brain at 1 Hz and 40 A
5 討論與結論
目前,磁刺激廣泛用于臨床治療神經及精神系統疾病。目前尚未見到磁刺激用于動物機器人運動控制的研究報道。磁刺激的核心部分是線圈。與人腦相比,小動物腦核團深度較淺,表面積更小,一般約為幾個平方毫米,目前很難將磁刺激聚焦在如此小的范圍內,無法進行精準的位點刺激,而且用于小動物的線圈需要進行小型化設計,為了產生有效的磁場,勢必要增加頻率和電流,減小電阻,這會導致線圈過熱以及機械應力問題[28]。因此,用于臨床的人用磁刺激線圈研究很多,并且已經商業化,而用于小動物的線圈研究很少。本文針對動物機器人磁刺激運動控制進行了初步的嘗試和探索,重點關注核心組件——磁刺激線圈的設計。
行TMS時,刺激線圈在腦內激發的感應電場呈渦流形態,由中心向四周發散,因此很難對某一靶點進行聚焦刺激。刺激強度或深度增大,聚焦性會隨之降低,反之亦然。因此,TMS的三個刺激性能互相矛盾。線圈設計的關鍵在于盡可能平衡三者之間的關系,在確定刺激深度和刺激強度的基礎上最小化聚焦面積。Rastogi等[29]在小鼠頭部模型上研究了slinky、V形、Helmholtz、solenoid、Halo、8字形、圓形7種線圈的磁刺激性能。其中,Halo線圈聚集性最差,而其刺激深度最大,等于或大于最大感應電場閾值125 V·m?1的深度可以達到9.2 mm;slinky聚焦性最好,線圈刺激深度最小,等于或大于最大感應電場閾值125 V·m?1的深度只有1.5 mm。與上述兩種線圈相比,半徑大約13 mm的8字形線圈聚焦性和刺激深度(等于或大于最大感應電場閾值125 V·m?1的深度為4.7 mm)都介于兩者之間,表現更為均衡。基于此,本文選擇了8字形線圈作為研究對象,通過仿真分析線圈的大小、繞制方法、擺放角度等因素對刺激強度、深度及聚焦性的影響,提出了磁刺激線圈的設計方案。該方案在兼顧一定的刺激強度和深度的基礎上,重點關注聚焦性的提升。文中設計的8字形線圈達到了213.92 V·m?1,遠遠超過了閾值,最小聚焦面積28.75 mm2,相較于臨床使用的線圈聚焦性有了明顯提升。雖然相對于鴿子機器人磁刺激運動控制這個目標來說還遠不夠理想,但本研究對小動物線圈設計及后期實際制作具有實用的參考價值。
實驗室自制的小型磁刺激系統輸出頻率范圍為1~20 Hz,通過線圈的電流強度在28~40 A之間,雖然性能遠不如商業化的磁刺激儀,但實驗結果表明,該刺激系統可以驅動本文所設計的線圈有效調控腦及坐骨神經功能。輸出頻率越小,通過線圈的電流強度越大,由此產生的磁場及誘導的感應電場強度越大,磁刺激引起的肌電反應越強。本次實驗中TMS不如直接刺激坐骨神經效果明顯,原因可能是磁刺激系統性能有限,坐骨神經直接控制肌肉功能,而經顱刺激無法準確進行腦核團定位。后期通過改進系統設計,提高輸出頻率和電流強度,可以有效提升TMS的效果。
磁刺激過程中,線圈溫度會上升,電阻隨之增大,電容放電時因線圈電阻增大,輸出電流下降,導致磁刺激效果減弱,而且線圈過熱會導致被刺激部位燙傷。本文仿真使用的線圈模型由直徑1 mm的銅導線繞制,向線圈內通入的電流頻率為2 500 Hz,幅值為5 000 A。仿真分析的目的是為線圈實際設計制作提供理論指導和依據,因此并未考慮線圈的載流量限制及發熱等實際問題。動物實驗時,自制的小型磁刺激系統輸出的電流參數遠小于仿真時使用的參數,而且刺激時間短,線圈發熱等問題不明顯。后期磁刺激系統性能提升后,制作線圈實物時需要在線圈的材料、半徑等方面進行設計改進,以減弱刺激過程中的線圈過熱問題。鄭志宇等[30]設計了一個針對SD大鼠的圓形TMS線圈及一套完整的液體冷卻系統,動物實驗證明該冷卻裝置可以在長時間高頻重復刺激時將線圈表面溫度控制在45 ℃以下。如何快速冷卻線圈、防止線圈溫度過高也是動物機器人磁刺激控制必須解決的一個問題,有待于進一步研究。
本文面向動物機器人磁刺激運動控制進行了初次嘗試和探索,通過仿真計算分析,提出了初步的線圈設計方案,制作了簡單的線圈實物并進行了初步的實驗驗證。雖然線圈性能還不完善,但是本研究為后續線圈設計改進提供了理論和實驗依據,為面向動物機器人的磁刺激系統設計改進和磁刺激運動控制實施等奠定了初步的理論和實驗基礎。
重要聲明
利益沖突聲明:本文全體作者均聲明不存在利益沖突。
作者貢獻聲明:許孟華負責線圈仿真分析以及論文撰寫、修訂。蒲鑫負責磁刺激器調試。常銘負責動物實驗手術。宋陽負責肌電信號分析。馬福喆負責肌電信號采集。槐瑞托負責動物實驗指導。楊俊卿負責硬件平臺指導與維護。常輝負責肌電信號分析指導。邵峰負責動物實驗方法及動物實驗倫理指導。汪慧負責制定研究方案及研究計劃,進行實驗設計及信號分析指導以及論文修訂審閱。
倫理聲明:本研究通過了山東本明生物科技股份有限公司動物倫理委員會的審批(批文編號:000851)。