針對傳統下肢康復量表評估方法費時、費力且難以在外骨骼康復訓練中使用的問題,本文基于下肢外骨骼機器人訓練提出了一種多模態協同信息融合的下肢步行能力定量評估方法。該方法通過引入定量的協同指標融合電生理和運動學層面信息,顯著提高康復評估過程的效率和信度。首先,采集受試者穿戴外骨骼步行訓練的下肢肌電和運動學數據。然后,基于肌肉協同理論,使用協同量化算法構造肌電和運動學的協同指標特征。最后,融合電生理和運動學層面信息,建立模態特征融合模型,輸出下肢運動功能評分。試驗結果表明,本文所構造的肌電、運動學協同特征與臨床量表的相關系數分別為0.799和0.825。融合后的協同特征在K近鄰(KNN)模型中的結果得到了更高的相關系數(r = 0.921,P < 0.01)。該方法可以根據評估結果修改外骨骼機器人的康復訓練模式,為實現“人在環中”的評估—訓練同步模式奠定了基礎,也為下肢遠程康復訓練和評估提供了一個潛在的方法。
引用本文: 鐘旭, 張弼, 李紀桅, 張亮, 元香南, 張鵬, 趙新剛. 面向外骨骼的下肢多模態協同量化分析與康復評估方法. 生物醫學工程學雜志, 2023, 40(5): 953-964. doi: 10.7507/1001-5515.202212028 復制
版權信息: ?四川大學華西醫院華西期刊社《生物醫學工程學雜志》版權所有,未經授權不得轉載、改編
0 引言
研究分析顯示,由腦卒中疾病引起的傷殘數已經從1990年的第三位飆升到2017年的第一位,腦卒中已經成為危及國人健康和生活質量的最大病因之一[1]。有數據表明,神經系統功能的康復效果在發生功能障礙后3個月內較為顯著[2],在康復的窗口期如果不能得到周期性的有效康復治療,可能會導致肌肉的永久性損傷。在臨床康復治療過程中發現,通過康復醫師在康復窗口期的肌張力抑制性牽引、跟腱拉伸、直立床站立訓練、神經—肌肉電刺激等方法能夠糾正并增強患者的肌張力,提高患者對下肢的控制能力,從而一定程度上恢復下肢的運動能力[3]。據《中國衛生健康統計年鑒》的數據表明,2020年中國康復執業(助理)醫師數為4.9 萬人,按照2025年每10 萬人口配置康復醫師8 人的標準而言,目前仍然存在5.2 萬人缺口[4]。傳統康復治療機構以及相關治療醫師難以滿足日益增長的社會需求,康復機器人技術應運而生。
20世紀末和21世紀初,世界范圍內就已開啟了對外骨骼康復裝置的研究,研制出了如ReWalk[5](ReWalk Robotics Inc.,美國)、HAL[6](Cyberdyne Inc.,日本)、Lokomat[7](Hocoma Inc.,瑞士)等成品康復外骨骼系統。我國外骨骼康復機器人的研究起步較晚,但經過科研院所與企業的不斷創新,涌現了如大艾[8](北京大艾機器人科技有限公司,中國)、布法羅[9](布法羅機器人科技(成都)有限公司,中國)、程天科技[10](杭州程天科技發展有限公司,中國)等一大批性能優秀的外骨骼機器人且取得了較好的應用效果。從外骨骼康復機器人技術的角度來看,現有的機器人往往注重早期本體功能的實現,沒有個性化和定制化的服務,穿戴和適配繁雜,對于醫生和患者體驗感都較低;且助力控制模式的設定未實現康復流程的智能化[11],需要人為介入,運行效率低,目前難以廣泛應用于臨床。從機器人系統智能控制角度出發,如能實現“人在環中”的閉環控制[12-13],可以讓醫患減輕負擔,為外骨骼機器人康復流程智能化帶來更多可能。目前,各外骨骼機器人相關的臨床研究都具有專門性,缺乏統一的康復訓練進程和效果評估[11]。因此,人在閉環的康復評估—訓練模式下可能會取得較好的康復效果。通常,臨床評估是由有經驗的康復醫師使用圖表的分級或評分指標手動進行,如布魯恩斯特朗分期量表(Brunnstorm recovery stages,BRS)[14]、福格-邁耶評估量表(Fugl-Meyer assessment,FMA)[15]、運動評估量表(motor assessment scale,MAS)[16]等。這種半定量的評估方法費時費力,且具有人為主觀性。隨著康復醫學的發展,早期的一些臨床診斷評定已不能滿足日益發展的康復醫學的需要。目前更多研究采用客觀性的評定方法,如利用生物力學、神經電生理等來衡量康復效果[17-18],這相比于傳統的康復評定方法具有更高的客觀度并且可以一定程度上減少對康復醫師的依賴性。隨著康復機器人技術的發展,由康復機器人衍生的測量技術為評估運動功能增加了一個新的維度,可通過獲取患者的各項參數,彌補臨床上康復醫師肉眼難以觀測到的物理量,還可根據相應的參數評估當前的康復進程,為下一步的康復治療提供有力的依據[19-20]。
近年來,人們對腦卒中的神經生理學和生物力學進行分析以量化患者異常的嚴重程度[21]。其中,康復機器人如何輔助康復訓練后運動功能的定量評估成為研究的熱點[22-23]。Liparulo等[24]以單通道表面肌電(surface electromyography,sEMG)信號自動評估腦卒中患者的損傷水平,并生成量表分期的客觀分類結果,與臨床量表呈現相關性。研究人員設計了便攜式測量系統,通過測量關節加速度,建立基于極限學習機的集成回歸模型來評估上肢活動能力,可在臨床和家庭環境中使用[25-26]。Ye等[27]使用上肢sEMG數據建立基于反向傳播網絡的數據驅動評估模型,可以用來評估慢性腦卒中患者的上肢運動功能。Qian等[22]開發了一種基于機器人的力和軌跡特征的運動功能定量評估方法,以反映腦卒中患者運動功能的恢復。這些研究提高了康復評估的效度可靠性,也拓展了其應用場景,有助于康復機器人在臨床的推廣。另外,隨著計算機科學技術的發展,機器學習成為研究的熱點。關于使用機器學習方法進行運動評估的研究,一般將動作分為正確或錯誤的類別,這些方法的輸出是0或1的離散值(即正確或不正確),只定性而不能定量檢測不同水平的運動質量或識別患者表象的增量的變化,且構建模型較為復雜,對模型的訓練集有特殊的要求。應用過程中,當出現新的數據集時,需要對模型重新訓練,過程周期較長,難以適應臨床康復評估的實際應用場景[28]。對此,基于距離函數的模板匹配算法已成功應用于腦卒中后康復訓練里訓練動作的分類和評估[29],這種方法具有不需要訓練模型、無需大量數據、計算速度快等優點。為了建立一個客觀的評估系統,量化完成規定練習動作的正確程度對于開發支持家庭或遠程康復的工具和設備十分必要。現有研究中,運動評估通常是通過比較患者的運動表現與健康參與者的期望表現來完成的[30]。該過程中,采用距離函數調整偏差,如歐幾里得距離、馬哈拉諾比斯距離和序列之間的動態時間規整等[29],其優點是不針對特定的運動,因此可以用于評估新的運動類別。但是目前大部分研究僅僅使用單一傳感器[31],難以全面評估患者的康復情況,并且這些研究大多針對上肢康復訓練與評估,缺乏針對下肢康復訓練的研究數據。下肢行走是保證人類進行正常獨立生活的必要條件,盡早地幫助患者恢復運動功能和行走能力,對其身心恢復也具有重要作用[32]。因此,開發一種針對下肢外骨骼康復機器人的康復評估技術成為本研究需要關注的重點。
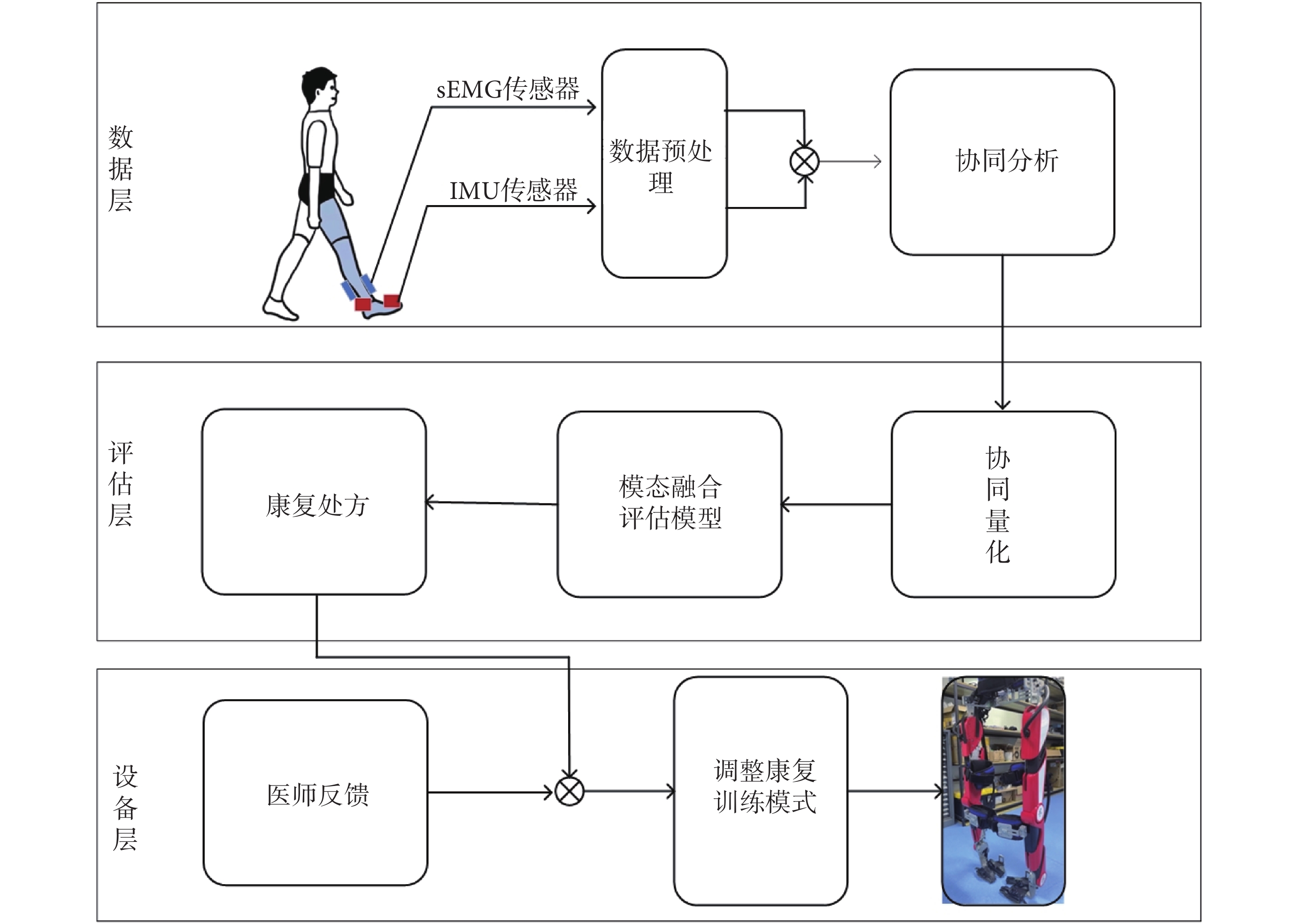
本文針對上述問題,提出一種面向下肢外骨骼的多模態傳感信息融合的偏癱患者下肢運動功能康復評估方法。如圖1所示,通過采集下肢sEMG和運動學信號,從運動學和電生理學角度全面分析患者的康復狀態,可以為患者個性化康復訓練提供可靠的依據,也可以作為直觀的反饋,以促進患者在有監督和無監督環境下的康復訓練。評估過程采用一種基于主成分分析(principal component analysis,PCA)運動數據相似度計算的方法來生成客觀一致的定量結果,以反映患者相對于預定義的模板的運動質量,從而體現肢體的康復程度。本研究還通過對不同程度偏癱患者的試驗來驗證所提出評估指標的效度和信度;并探討不同評分結果的差異是否具有統計學意義,以及所提出的評估指標與評分量表的相關性,再將與臨床量表相關的指標結果輸入建立的融合模型中得到機器評估結果。最終,期望本文研究方法結合臨床康復醫生的決策,可用于腦卒中患者的下肢外骨骼機器人輔助康復。
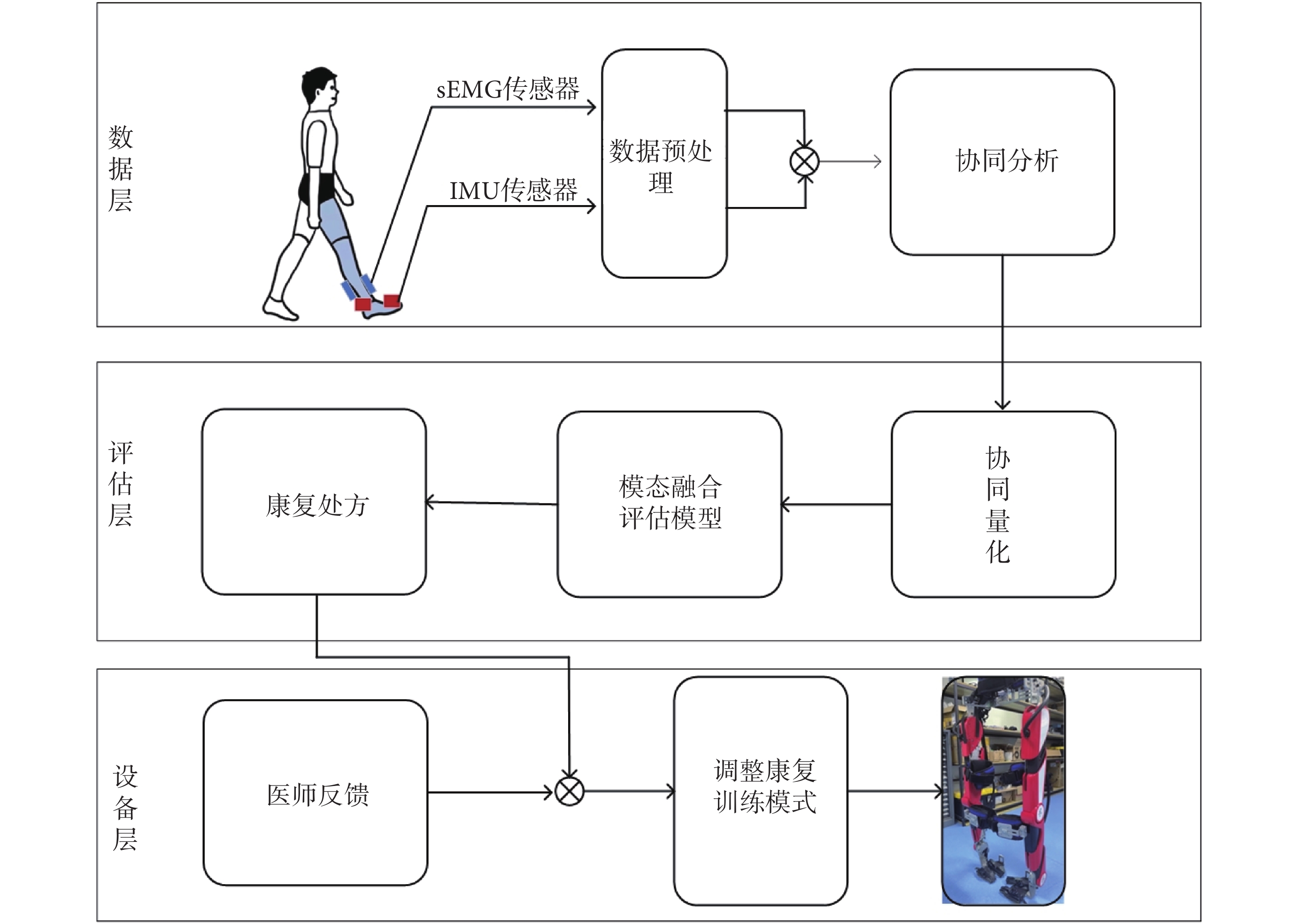 圖1
下肢康復評估系統流程
Figure1.
Process of lower limb rehabilitation assessment system
圖1
下肢康復評估系統流程
Figure1.
Process of lower limb rehabilitation assessment system
論文主要貢獻如下:① 根據下肢運動特性,構建協同量化指標作為下肢分類和評估的特征,驗證與臨床康復量表具有較高的相關性。② 構建運動學、電生理信息的多模態協同特征融合評估模型,驗證對于不同新患者而言本文模型的評估效果,期望能具有較好的泛化性,可應用于康復評估的臨床實際場景。③ 評估所需的sEMG傳感器和慣性測量單元(inertial measurement unit,IMU)傳感器是否使用簡單、穿戴便捷,以便在下肢外骨骼不附加多余傳感器的基礎上,實現“人在環中”的評估—訓練同步模式。
1 基于外骨骼的數據采集試驗范式
1.1 受試者信息
如表1所示,本研究從遼寧省人民醫院康復科招募了10名患有慢性腦卒中的偏癱患者(編號為S1~S10),遵循以下準則入組:① 年齡為18~78 歲之間,為首次發生缺血性或出血性中風。② 能夠主動或被動進行獨立行走,時長約1 min。③ 經BRS分期或FMA評分和精神狀態檢查,無嚴重的認知功能障。④ 患者下肢等目標肌群可檢測到自發性的sEMG信號。另招募10名正常發育的成年男性志愿者作為對照組,年齡(26.6 ± 2.6) 歲,身高(1.74 ± 0.08) m,體重(69 ± 10.9) kg,步態行走正常,無神經系統性疾病。在試驗之前,每位腦卒中患者都由一位經驗豐富的康復治療師進行量表評估分類,分類結果如表1所示。所有受試者均已簽署書面知情同意書。本文試驗過程遵循赫爾辛基宣言,并通過了遼寧省人民醫院倫理委員會的倫理審核批準(批件號:2022HS007)。
1.2 監測肌群的選擇
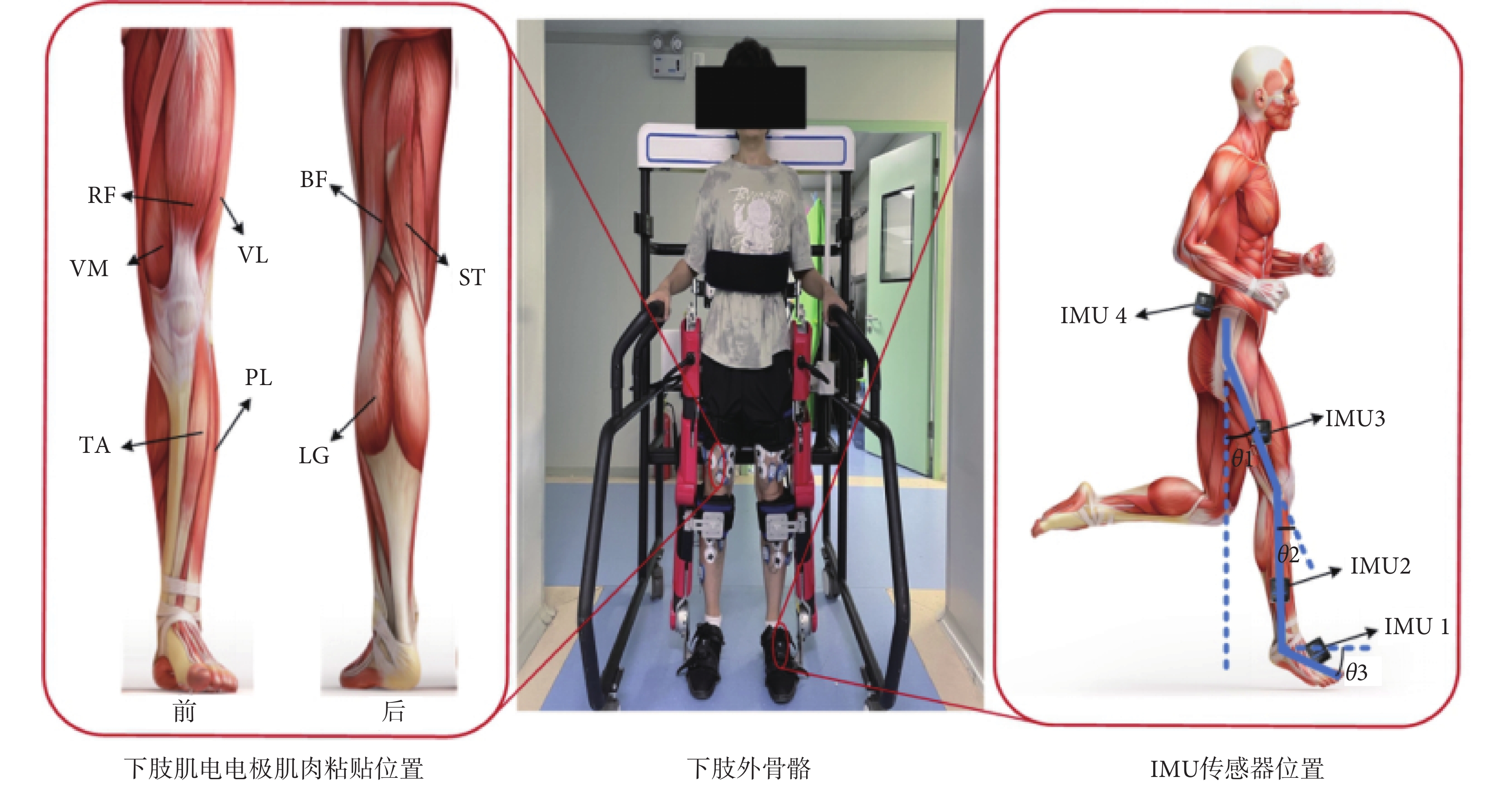
偏癱患者的脛骨前肌(tibialis anterior,TA)肌力小于正常人且作用時間短,導致踝關節背屈不足,作用時間僅限于足跟落地的短時間內,且支撐中期偏癱患者的腓腸肌和比目魚肌力均小于正常人[33-34]。如圖2所示,本文選取以下8塊肌肉將8個電極放置在肌肉表面:TA、腓骨長肌(peronaeus longus,PL)、外側腓腸肌(lateral gastrocnemius,LG)、股內側肌(vastus medialis,VM)、股直肌(rectus femoris,RF)、股外側肌(vastus lateralis,VL)、半腱肌(semitendinosus,ST)、股二頭肌(biceps femoris,BF)。
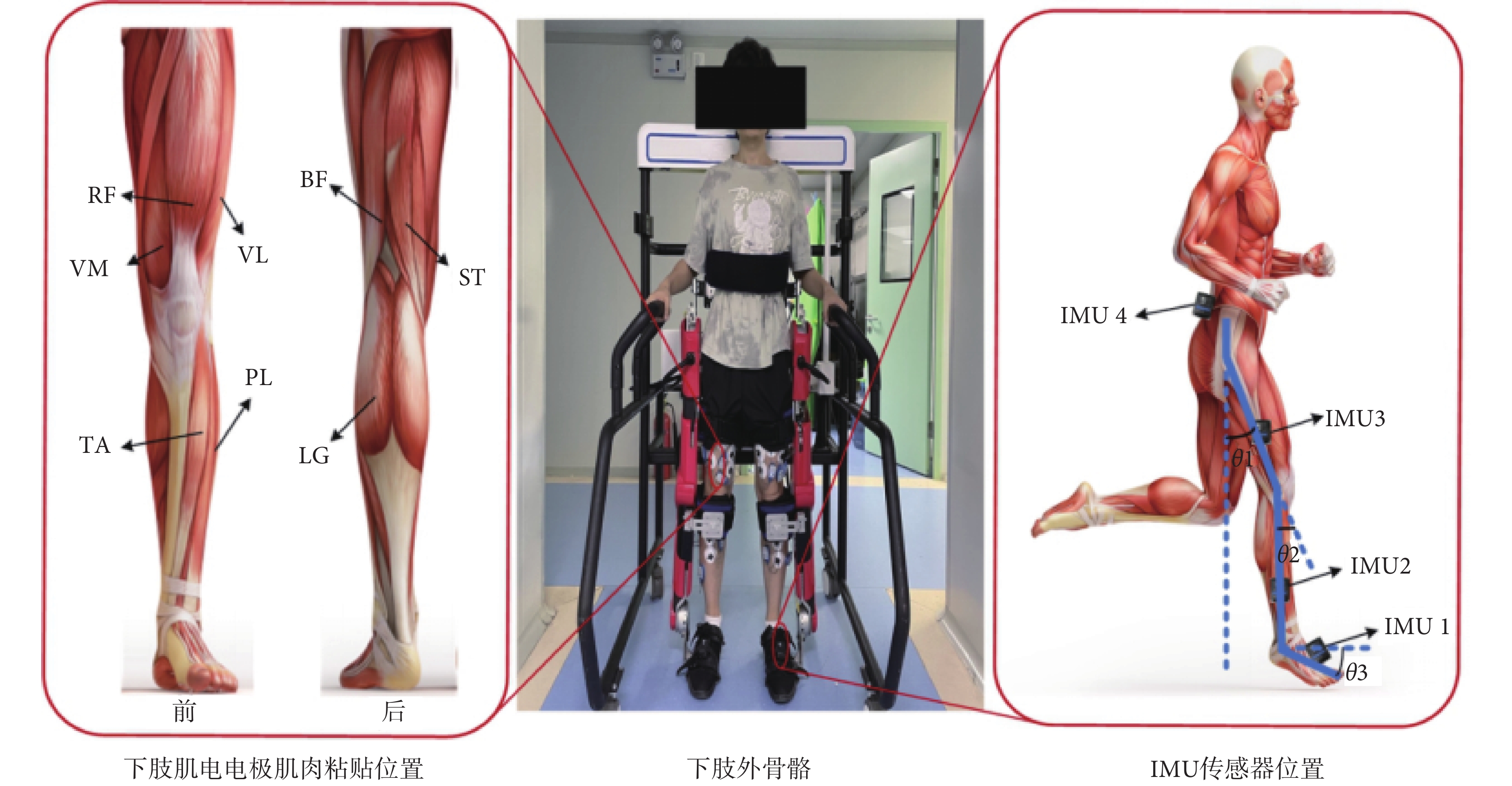 圖2
受試者信號采集
Figure2.
Subject signal acquisition
圖2
受試者信號采集
Figure2.
Subject signal acquisition
1.3 信號采集與處理
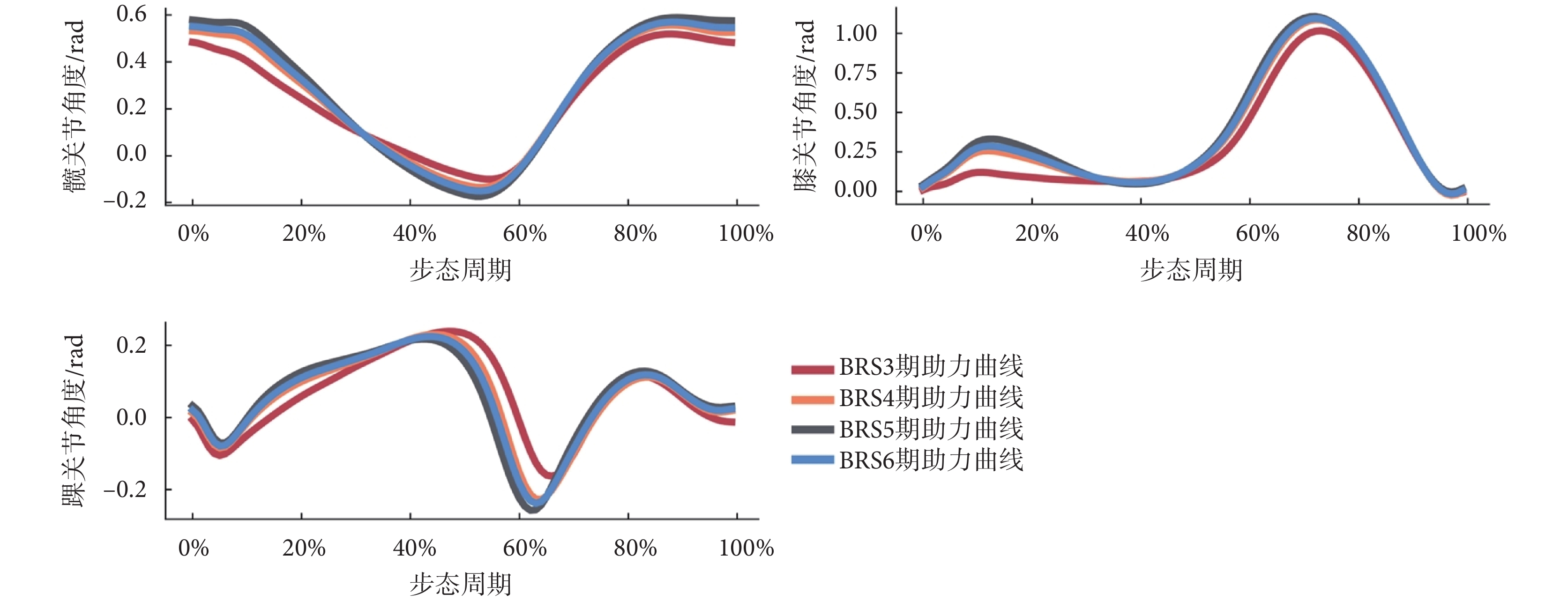
下肢外骨骼使用本課題組開發的康復機器人,如圖2所示,其基于仿生的剛柔耦合結構,可實現下肢矢狀面雙側六關節的全自由度主動驅動,對具有運動功能障礙的受試者可實現人機復雜交互場景下的準確力/位跟蹤與主動輔助力矩生成;利用多傳感信息與平衡控制器對人機交互意圖、平衡異常狀態進行估計,能夠預規劃多模場景下人體下肢運動狀態,確保人機系統間協同交互的柔順性。而且,為了增強不同康復時期患者下肢肌肉的運動能力,還可采取主動訓練和被動訓練相結合的康復策略。其中,外骨骼機器人采用如圖3所示的下肢髖、膝、踝關節助力曲線,不同助力模式對應四種步態曲線,可覆蓋下肢BRS 3期~ BRS 6期運動功能障礙者的康復訓練[35]。所有受試者可在外骨骼訓練過程中實現信號采集與評估。本研究利用訓練過程中的10個步態數據進行評估分析,其中基準模板為所有對照組受試者的平均數據。
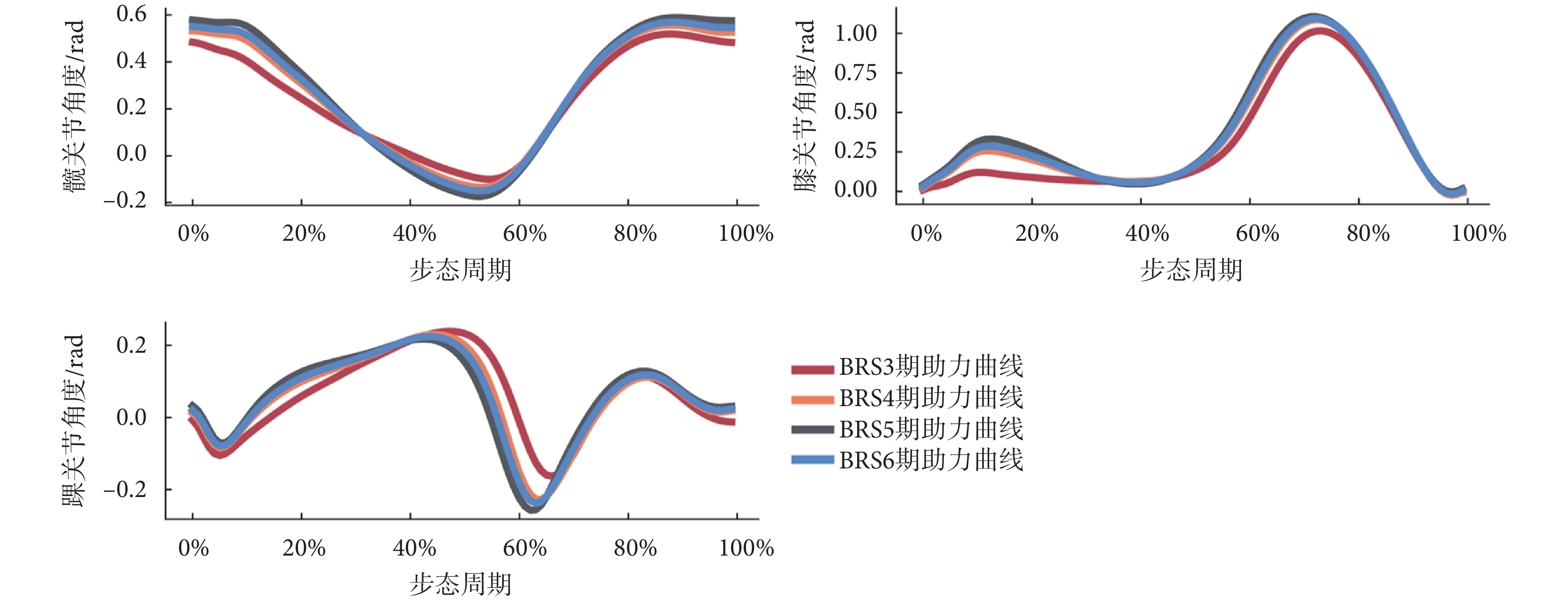 圖3
外骨骼助力曲線
Figure3.
The power curve of the exoskeleton
圖3
外骨骼助力曲線
Figure3.
The power curve of the exoskeleton
sEMG數據采集設備為Noraxon Ultium系統(NORAXON Inc., 美國)。采用氯化銀(AgCl)材質的電極片,每個通道的兩個電極間隔20 mm 粘貼在受試者雙腿的目標肌肉沿肌肉纖維方向的肌腹[36]。運動學信號采用myoMOTION (NORAXON Inc.,美國)的IMU,采集下肢髖、膝、踝關節矢狀面的角度變化,如圖2所示,分別為IMU 1~IMU 4,測量髖關節角度為θ1、和膝關節角度為θ2、和踝關節角度為θ3。受試者按前述方法佩戴傳感器,穿著外骨骼,同步采集訓練的sEMG信號和運動角度信號。
由于原始的sEMG信號中存在大量的噪聲信號[37],而其頻率范圍在0~500 Hz[38],所以本文需對原始sEMG信號進行濾波去噪處理。記錄采樣頻率為2 000 Hz的原始sEMG信號,經高通濾波(巴特沃斯,25 Hz,5階)、整流和低通濾波(巴特沃斯,5 Hz,5階)進行歸一化處理[39-40]。運動角度信號的采樣頻率為200 Hz,不需進行預處理。
1.4 連續步態周期劃分
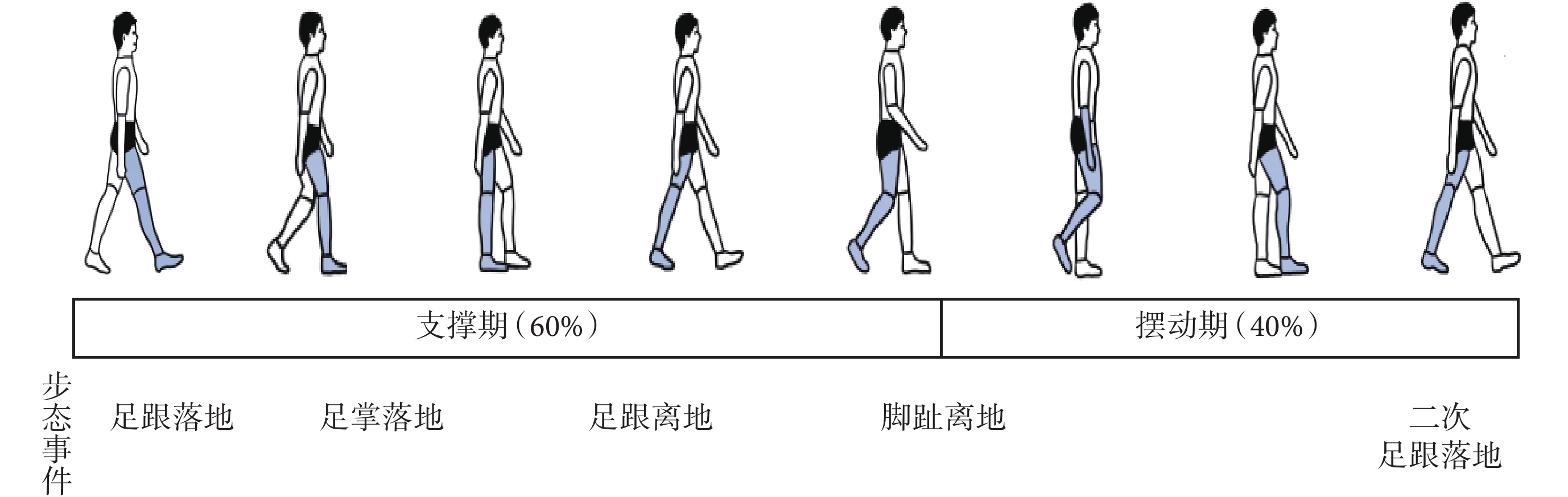
本試驗采用患者穿戴外骨骼訓練后最常見的每個步行動作為樣本,以測試受試者的下肢活動能力。由于步態分析需要以周期為單位進行研究,因此首先要確定步態的起始點,進而劃分步態周期,截取每個步態周期所對應的多通道數據用于下一步分析。如圖4所示,一個完整的步態是由足跟落地、足掌落地、足跟離地、腳趾離地四個典型的步態事件組成的一個完整的步態周期[41]。其中,支撐期為足跟落地至腳趾離地,約占步態周期的60%,擺動期為腳趾離地至二次足跟落地,約占步態周期的40%。該過程與患者穿戴外骨骼進行的訓練動作相吻合,可直接使用在下肢外骨骼系統上。步態起始時間S(t)的定義如式(1)所示:
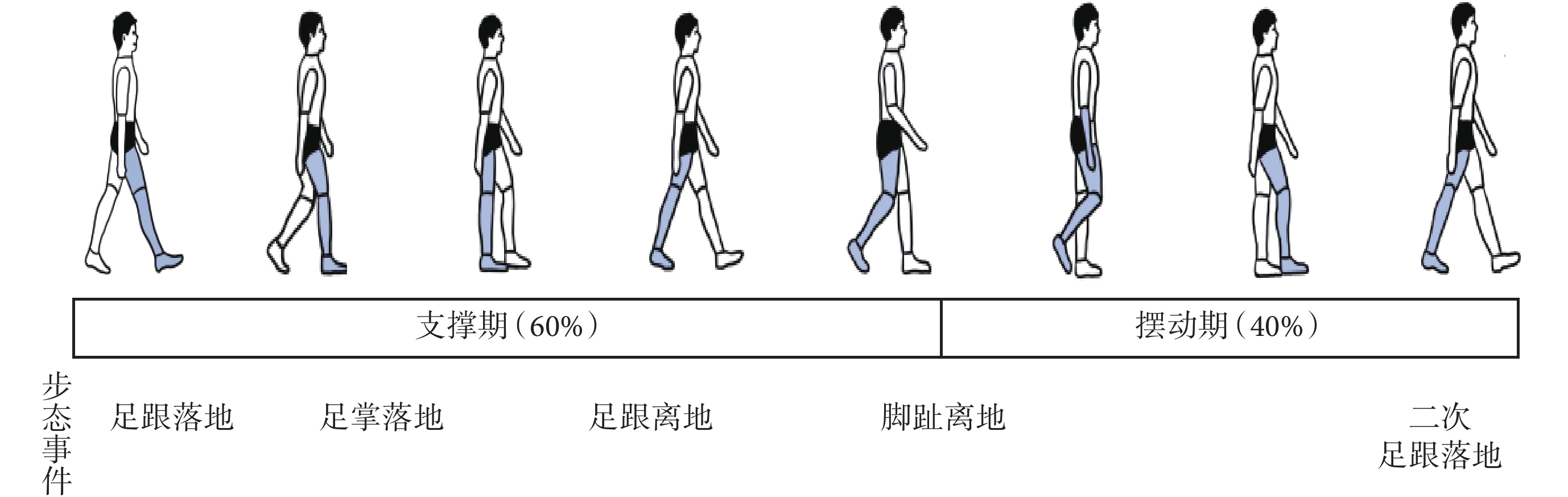 圖4
下肢步態周期劃分
Figure4.
Cycle division of lower limb gait
圖4
下肢步態周期劃分
Figure4.
Cycle division of lower limb gait
 |
其中,  為足部的俯仰角大小,其峰值為步態周期的開始[41];max(·)代表最大值函數;t代表步行時間;采樣樣本為連續10個步態周期的數據。
為足部的俯仰角大小,其峰值為步態周期的開始[41];max(·)代表最大值函數;t代表步行時間;采樣樣本為連續10個步態周期的數據。
2 基于肌肉協同理論的下肢運動量化方法
2.1 肌肉協同提取
肌肉協同(muscle synergy)被認為是中樞神經系統產生協調運動的一種優化的控制策略[42],現已有足夠的經驗證據支持肌肉協同分析在評估腦卒中康復效果時的潛在效用[43]。研究人員發現,在發育正常的健康人的下肢運動步態分析中,肌肉協同模式具有高度的一致性[44]。即使在一些需要學習的專業運動員訓練動作中,研究人員也證實肌肉協同作用在受試者之間是一致的[45]。這些研究揭示了肌肉協同是神經肌肉協調控制的普遍機制,同時也為康復運動功能障礙分析提供了新的思路。肌肉協同可以用肌肉運動所產生的sEMG信號隨時間變化的模式來定量分析。已有一些分解算法,如因子分析、非負矩陣分解、PCA等,被用于將多通道sEMG數據分解為更小的高代表性變量集[46]。協同分解的基本數學模型如式(2)所示:
 |
其中,給定矩陣Mn· t可分解為反映空間特征的協同元矩陣Wn· k和反映時序特征的激活系數矩陣Hk· t,E為誤差矩陣,可忽略不計。n為信號的通道個數,t為樣本的數量,k為協同元個數,T為轉置符號,i為矩陣個數。
典型的協同提取方法是矩陣分解,將原始數據投影到較低維空間中,同時保留代表性信息。本文采用的PCA是一種特征提取的經典統計技術,適用于包含冗余信息的數據集,廣泛用于模式識別和計算機視覺等領域[47-48]。它尋求一個線性正交變換W矩陣,將獲取的數據X矩陣轉化為隱藏的低維變量矩陣Z,如式(3)所示:
 |
其中,矩陣Z的每個元素獲得方式,如式(4)所示:
 |
其中,zij為低維矩陣Z的元素,wi為其正交向量,xj為特征向量,T為轉置符號。為了得到正交向量wi,將損失函數J設為變換后方差的最大值,如式(5)所示:
 |
其中, 表示xj的平均值,A為X的協方差矩陣。損失函數J在wi上等于S的r個最大特征值的特征向量。本文使用奇異值分解(singular value decomposition,SVD)用于獲取特征值σi和對應的特征向量ui,之后得到正交矩陣W。由此,可以計算出式(3)中的Z。本文中X為預處理后的t·n維sEMG數據(t為一個步態周期的采樣點個數,n為8 個通道),W為n·k維的正交變換矩陣(k為肌肉協同元個數),Z為k·m維的變換數據。經SVD后得到的特征值和特征向量用于計算相似度。在Ivanenko等[44]的研究中,人步行時的下肢肌肉可以分為5個協同模式,因此在本文中的協同元k設為5。
表示xj的平均值,A為X的協方差矩陣。損失函數J在wi上等于S的r個最大特征值的特征向量。本文使用奇異值分解(singular value decomposition,SVD)用于獲取特征值σi和對應的特征向量ui,之后得到正交矩陣W。由此,可以計算出式(3)中的Z。本文中X為預處理后的t·n維sEMG數據(t為一個步態周期的采樣點個數,n為8 個通道),W為n·k維的正交變換矩陣(k為肌肉協同元個數),Z為k·m維的變換數據。經SVD后得到的特征值和特征向量用于計算相似度。在Ivanenko等[44]的研究中,人步行時的下肢肌肉可以分為5個協同模式,因此在本文中的協同元k設為5。
2.2 協同量化
對于運動數據  ,其中n是提取的分割步態的數量,
,其中n是提取的分割步態的數量, 是其中一個步態的數據。經PCA分解后,即有協同向量ui、vi,對應特征值σi 、δi,如式6所示。在高維的空間中,如果兩個運動是相似的,那么其運動軌跡應是相似的。因此,如果對應的運動相似,運動數據矩陣應該具有相似的幾何結構[49]。本研究利用PCA算法進行協同分解,生成運動矩陣的特征向量,并利用這些特征向量對相應的運動數據進行索引或分類。
是其中一個步態的數據。經PCA分解后,即有協同向量ui、vi,對應特征值σi 、δi,如式6所示。在高維的空間中,如果兩個運動是相似的,那么其運動軌跡應是相似的。因此,如果對應的運動相似,運動數據矩陣應該具有相似的幾何結構[49]。本研究利用PCA算法進行協同分解,生成運動矩陣的特征向量,并利用這些特征向量對相應的運動數據進行索引或分類。
 |
如果兩個運動相似,其對應的協同向量u1和v1應該在幾何上基本平行[49],即有  。θ為兩個協同向量u1和v1之間的夾角。為了評價患者的康復程度,如式(7)所示,本文使用加權相似度度量方法[50]來計算每段sEMG數據和運動數據與基準模板的相似程度,以定量評估患者的康復狀態。
。θ為兩個協同向量u1和v1之間的夾角。為了評價患者的康復程度,如式(7)所示,本文使用加權相似度度量方法[50]來計算每段sEMG數據和運動數據與基準模板的相似程度,以定量評估患者的康復狀態。
 |
其中,n為特征值數量,B為依據對照組建立的基準數據,P為受試患者數據。σi、λi為基準數據和受試數據的第i個特征值,對應于第i個協同向量ui、vi。因此,相似性度量僅為兩個運動矩陣的協同向量和對應的特征值,而不包含來自其他運動數據矩陣的任何貢獻。其可捕獲分解的k個協同向量的相似程度,并由對應的特征值加權計算。φ 的范圍在0~1之間。越接近于1,證明患者與對照組的模板越相似,即康復狀態越好。
2.3 模態融合評估模型
根據BRS分期的定義[14],分期的主要區別是協同模式和獨立關節的運動模式不同,強調整個恢復過程逐漸向正常、復雜的運動模式發展,從而達到中樞神經系統重新組合的效果。這在使用單一傳感器測量時可能不明顯,需要額外的特征來進一步區分每個具體運動的模式分期[31]。因此,為了證明所提出協同特征的適用性,本文構建電生理和運動學的融合協同向量Fi如式(8)所示:
 |
其中,Ei為電生理協同特征,Ki為運動學協同特征,n為協同特征個數。采用有監督的機器學習模型,可以得到受試者下肢康復的預測分數Si,如式(9)所示:
 |
其中,M選取K近鄰(k- nearest neighbor,KNN)、隨機森林(random forest,RF)、多層感知機(multilayer perceptron,MLP)、支持向量回歸(support vector regression,SVR)四種機器學習模型[18]。在KNN模型中取最近鄰數為5,設特征空間X是n維實數向量空間,(xi,xj)∈X,xi =(xi(1),xi(2),···,xi(n)), xj=(xj(1),xj(2),···,xj(n))。(xi, xj)的距離函數L,采用如式(10)所示的歐幾里得距離:
 |
其中,l為特征空間X的維數。
MLP定義為多層前饋神經網絡,隱藏層設置為130 個神經元,輸出層選取線性整流函數(rectified linear unit,ReLU)作為激活函數。為了優化權重和偏置,在神經網絡中采用擬牛頓法(quasi-Newton)的優化器來加快收斂速度和效果;設置RF最大的樹深為5,基評估器的數量為10;SVR采用徑向基函數為核函數。Si為模型的輸出,評估分數對應模型輸出,為連續的分數,因此比傳統的分類評估更精細化。為了評估模型綜合不同等級患者數據的能力,適應新患者的在線康復評估,體現融合評估模型的泛化性能,由100個試驗樣本組成的完整數據集被分為訓練集和測試集。訓練數據集從6個個體中收集60 個試驗樣本,其余4 個個體樣本被劃分為測試數據集。
3 試驗結果及分析
3.1 健患側比較分析
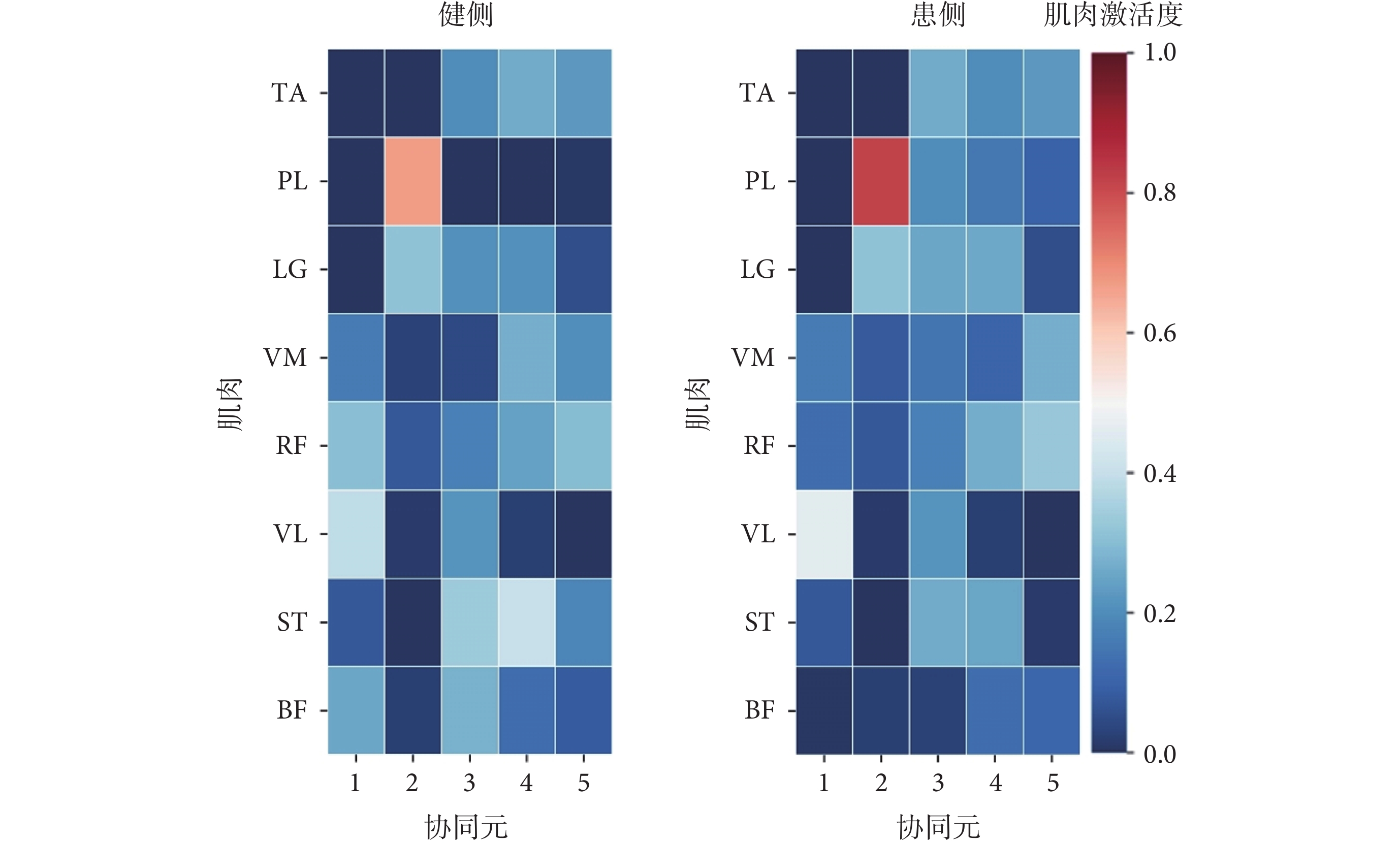
BRS 3期受試者健、患側協同元權重對比如圖5所示。其中1~5為分解出的五個協同元肌肉激活權重。其范圍為0~1,表示肌肉激活權重由小到大。圖5可以看出,由于偏癱后部分肌肉萎縮導致sEMG信號活躍度較低,患側權重普遍比健側權重低。但是BRS 3期患者的PL患側激活權重比健側高,這可能是由于PL痙攣導致下肢肌張力偏高。
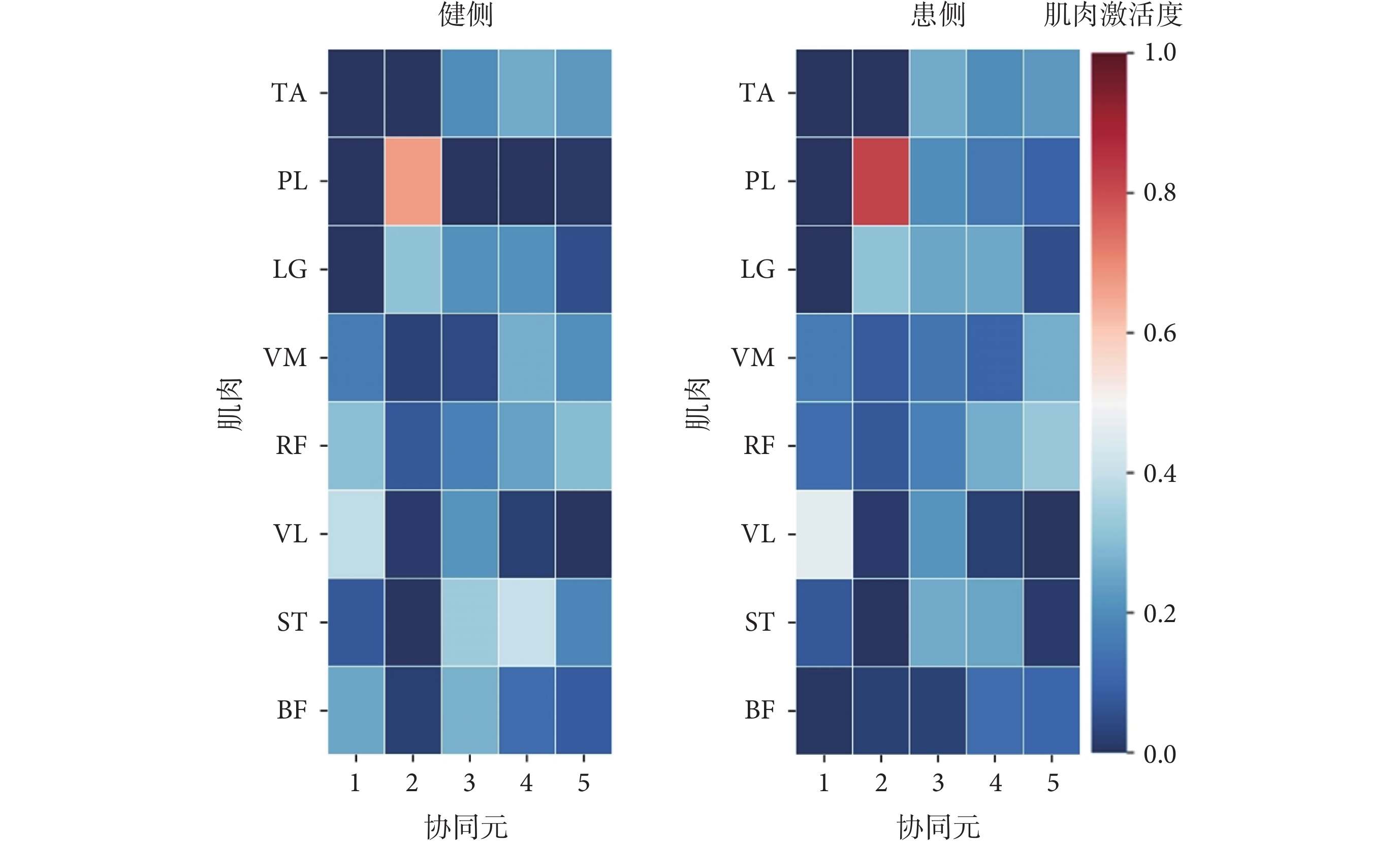 圖5
健患側協同元權重對比
Figure5.
Comparison of synergies weights in the affected and contralateral side of patients
圖5
健患側協同元權重對比
Figure5.
Comparison of synergies weights in the affected and contralateral side of patients
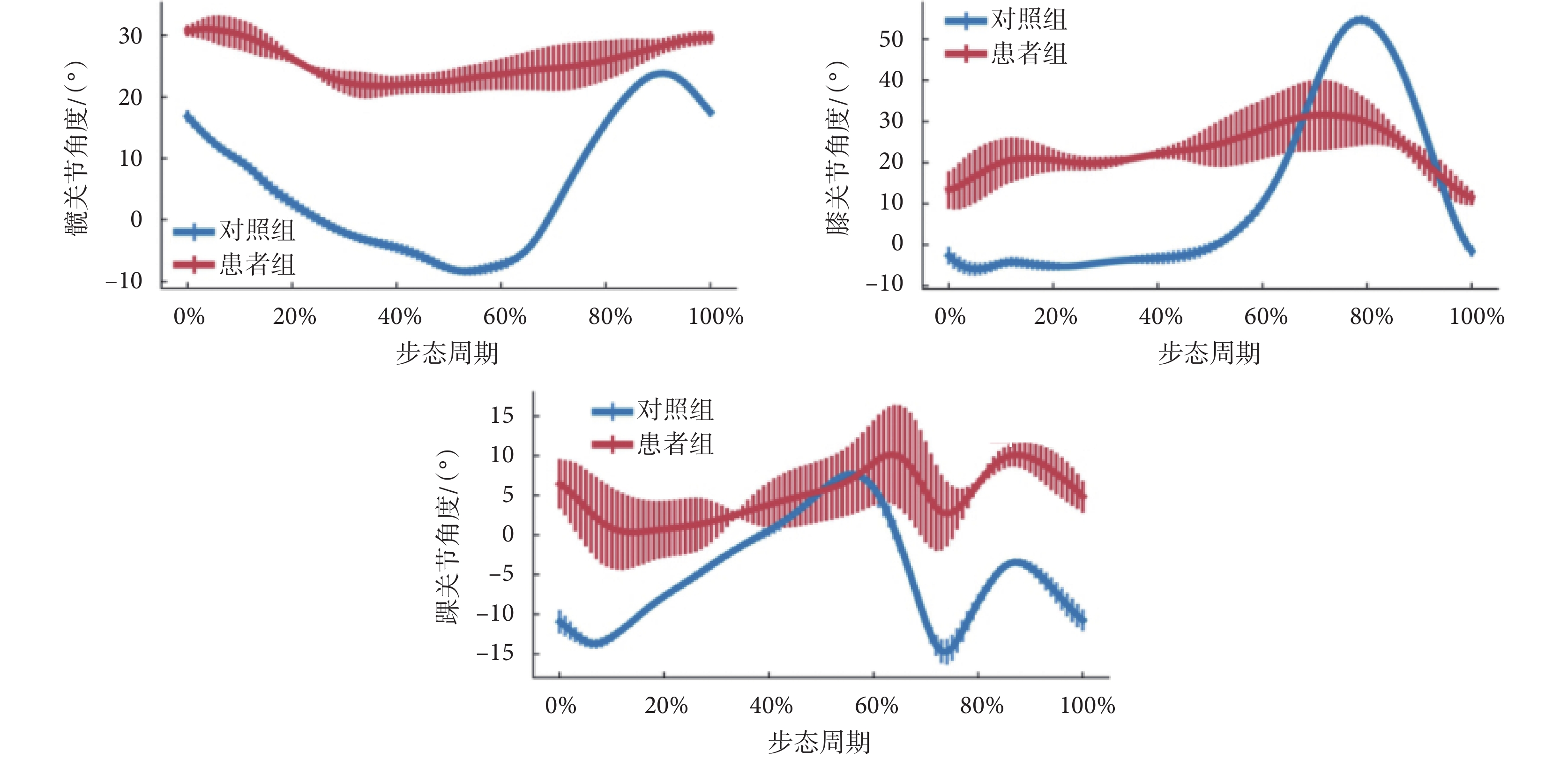
從患者身上采集的運動樣本量表BRS 6期和BRS 3期主體如圖6所示。BRS 6期的患者有能力完成獨立行走,并且相關參數和正常人保持一致。然而,由于腦卒中引起的下肢疼痛和肌肉控制受損,BRS 3期的樣本往往是不穩定的。具體而言表現為,由于髖屈肌無力,患者髖關節的活動范圍明顯降低。由于膝關節屈肌無力,受影響的膝關節在站立或擺動階段都不能正常彎曲,抬腿的幅度較小導致膝關節的屈曲角度偏小。通常,踝關節的最大足底屈曲是在步態周期的起始階段產生的,但由于膝關節屈曲角度降低,患側足難以踏出地面,因此足底沒有明顯屈曲。此外,由于患者在擺動期未能充分抬起患側的腳前掌,最初的接觸表現為平足接觸地面,而不是足跟落地。
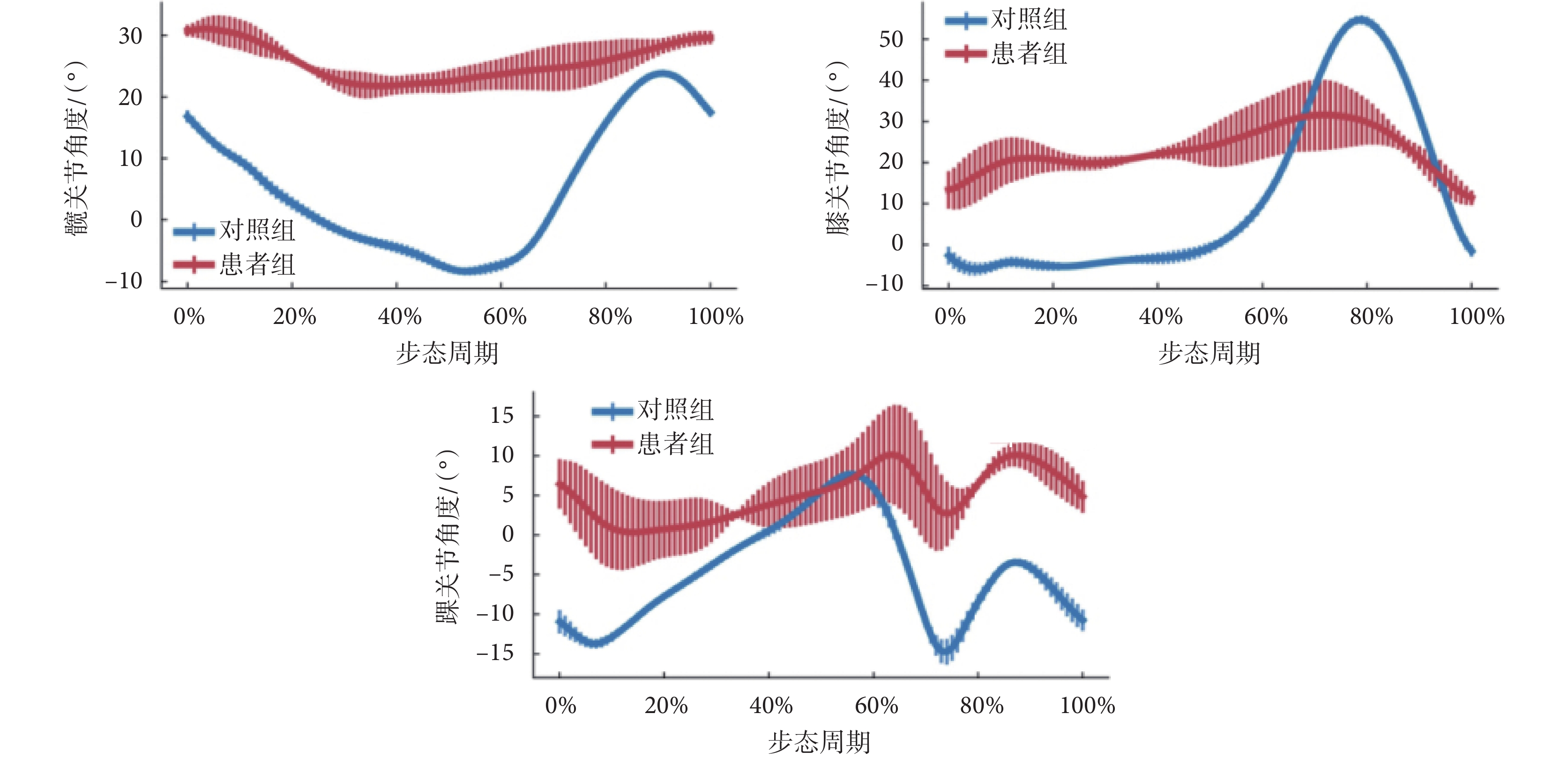 圖6
受試者下肢角度對比
Figure6.
Comparison of lower limb angle data of subjects
圖6
受試者下肢角度對比
Figure6.
Comparison of lower limb angle data of subjects
綜上所述,患側肢體主要表現為在擺動階段屈伸運動減弱,患者下肢肌肉力量的缺失,導致行走的靈活性和穩定性的不足,在支撐階段不能很好地單獨支撐身體重量。通過對sEMG信號和關節角度的分析,可以揭示偏癱患者的行走能力在關節運動范圍上是如何受限的。BRS 3期患者由于關節靈活性的限制和出現的肌肉痙攣現象,導致運動總是提前終止或者偏離正常角度。這些都可以很直觀地反映出患者組下肢行走活動能力的局限性。
3.2 協同指標特性分析
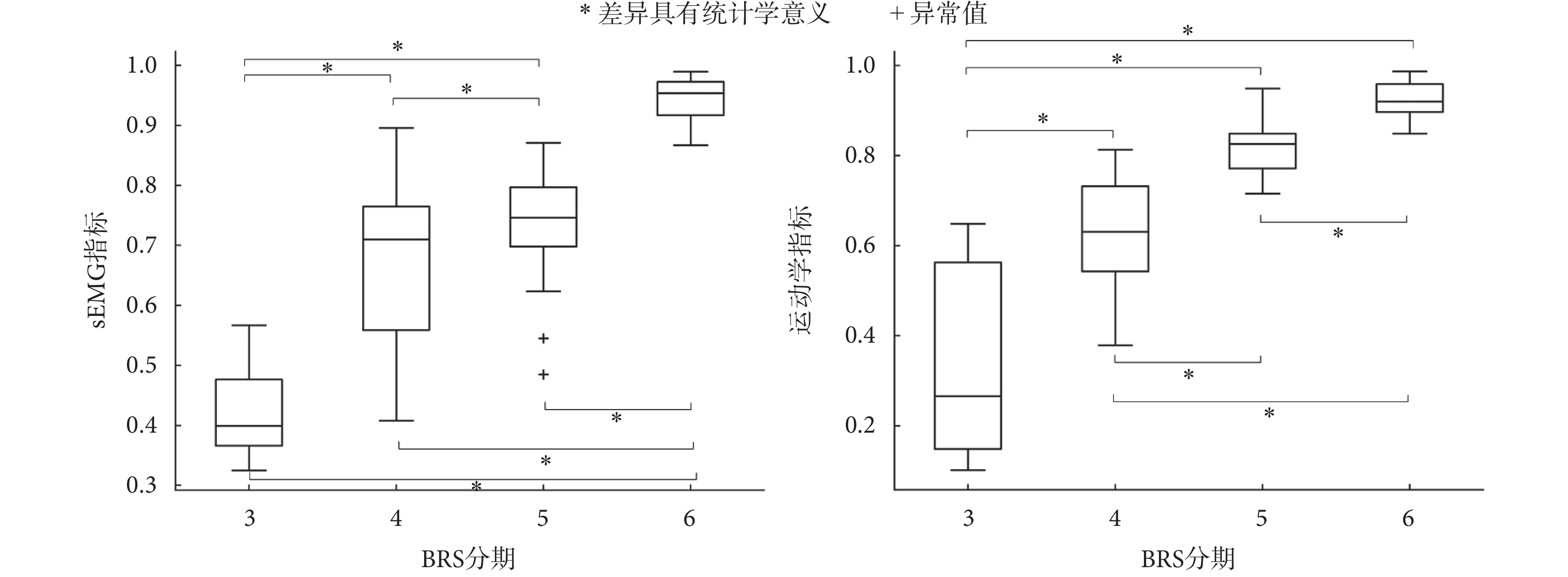
本文將10名患者分為4個BRS分期。如圖7所示,不同BRS分期的患者的協同指標特征差異均具有統計學意義(獨立樣本t檢驗:P < 0.01)。協同特征在不同BRS分期中的對比分布情況如圖7所示,sEMG協同特征在BRS 6期和3期分布較為集中。在BRS 5期中由于患者S7肌肉痙攣比較明顯,導致sEMG協同特征相較于對照組模板對比差異較大,出現了兩個異常的值。但是,在同期的運動學指標中數據分布較為穩定。相反在運動學指標中,BRS 3期患者組數據分布差異較大,且與對照組差異波動范圍較大,達到0.102~0.648,這可能是因為患者S6主訴為右側肢體活動不能伴有言語不能,且該患者發病時間剛滿一個月導致下肢的肌肉控制情況不理想,因此有少量行走不佳的運動樣本。BRS 3期患者由于患有嚴重運動功能障礙和過高的痙攣性肌張力,他們的運動學和肌電的協同指標特征也相對較低。然而,本試驗中的BRS 6期患者的標準差都遠小于BRS 3~5期偏癱患者,因此不管sEMG還是運動學協同指標特征都表現得比較穩定和集中,說明BRS 6期患者在下肢步行運動時肌肉控制能力和角度曲線都相對穩定,比較接近正常健康人水平。
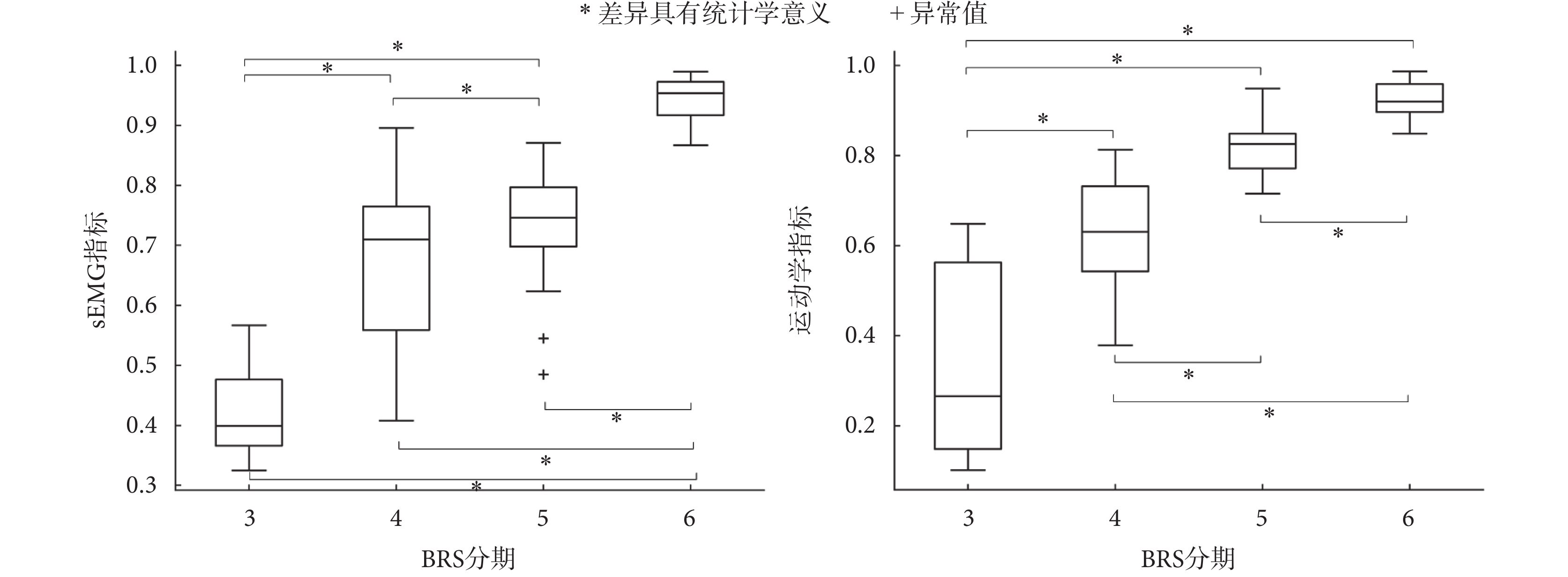 圖7
協同指標的數據分布關系
圖7
協同指標的數據分布關系
*
*
總體來說,不管是sEMG還是運動學協同指標,在特征分布上都符合BRS分期的特點。如圖7所示,BRS 3~6期的患者組sEMG指標的25%~75%位數分別在0.37~0.48、0.56~0.77、0.71~0.80、0.92~0.97范圍內;運動學指標3~6期受試者25%~75%位數分別在0.17~0.56、0.55~0.75、0.78~0.87、0.93~0.96范圍內。僅sEMG指標,在BRS 4期和5期有部分重疊,其原因可能是4期和5期受試者接受訓練時間較長,恢復狀況較好,導致電生理層面差異較小。其余各分期受試者的指標范圍較少有重疊的部分,說明該指標可以較好地根據建立的健康基準模板進行無監督的康復量表分期。如表2所示,為每位患者的sEMG指標和運動學指標的中位數、平均值、25%~75%差值。
3.3 融合結果分析
為了更好地評估兩種指標與臨床BRS分期量表的相關性,如式(11)所示,計算sEMG指標和運動學指標與臨床量表的相關系數,檢驗水準為0.05。
 |
其中,Xi、Yi分別是所提協同指標和臨床量表對應i的值, 、
、 分別為Xi、Yi的平均值,n為樣本數量,r為計算出的相關系數。
分別為Xi、Yi的平均值,n為樣本數量,r為計算出的相關系數。
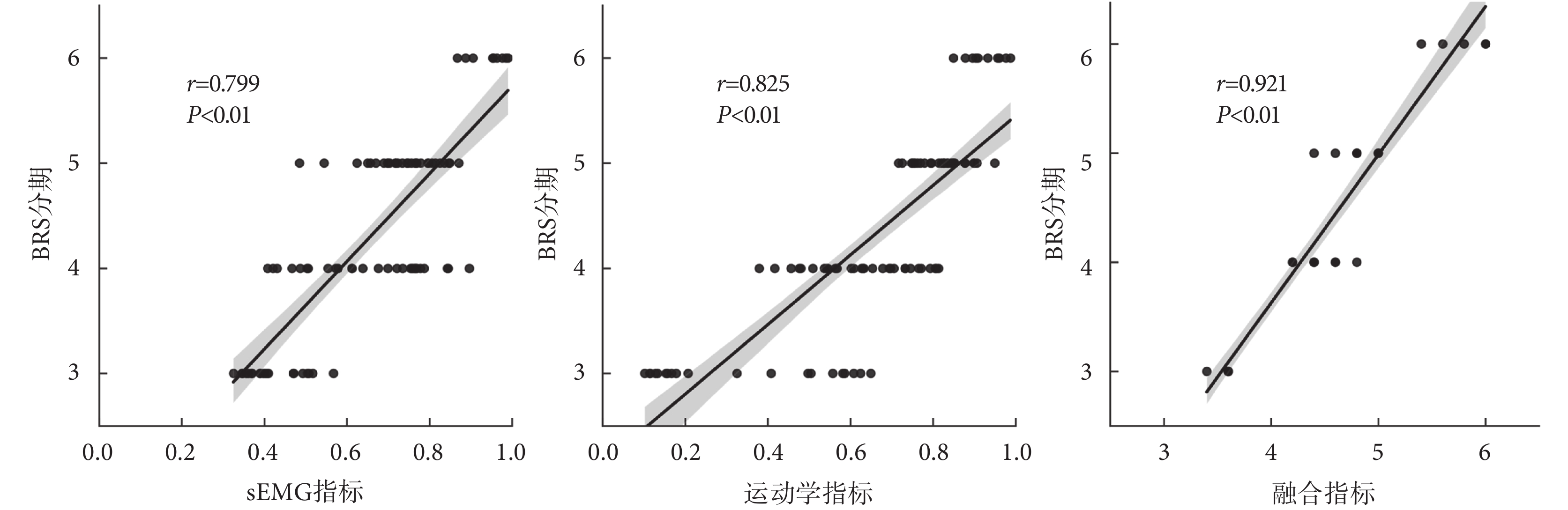
如圖8所示,運動學指標與BRS分期之間的相關性為r = 0.825(P < 0.01),sEMG指標與BRS分期之間的相關性為r = 0.799(P < 0.01)。結果顯示,電生理層面和運動學層面的兩項協同指標都與臨床評估量表有較強的相關性。為了驗證所提出協同指標的效度和信度,將融合特征輸入幾種機器學習模型中,得到評估分數。使用95%置信區間進行皮爾遜(Pearson)相關檢驗來分析單模態與多模態融合模型和BRS分期之間的相關性,結果如表3所示。
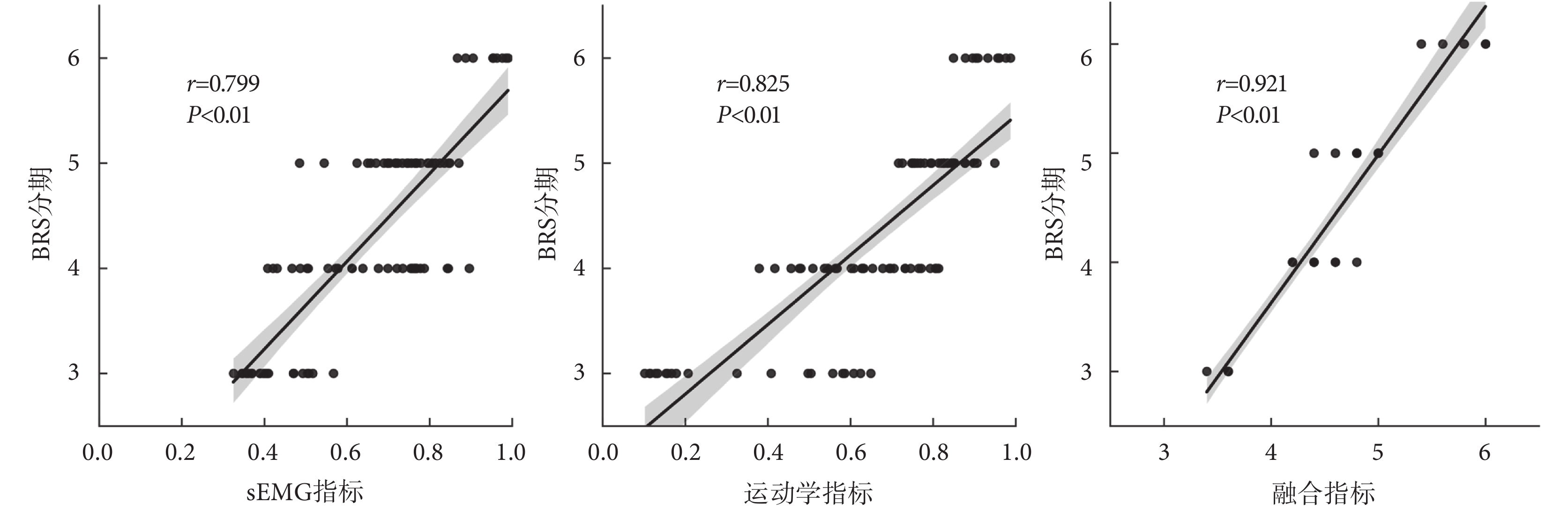 圖8
協同指標與臨床量表的相關性檢驗
Figure8.
Correlation test between synergy index and clinical scale
圖8
協同指標與臨床量表的相關性檢驗
Figure8.
Correlation test between synergy index and clinical scale
結果顯示,單模態運動學的相關系數比單模態sEMG更接近于1;sEMG信號由于受試者個體差異,因而具有非平穩性和個體差異性,其結果都較低于單模態運動學。但是無論何種模型,其多模態特征融合都展示出了更高的相關系數。相比于其他三種算法,KNN表現出了良好的評估性能,其原理為計算測試與訓練樣本集中每個樣本的歐幾里得距離,即在特征空間中的K個最相鄰樣本屬于某一個類別,則該樣本也屬于這個類別,這與模板匹配產生的協同特征指標思想基本一致,都為計算相似度,所以輸入的協同融合向量在KNN模型中得到了最好的結果。如圖8所示,所提出的融合特征指標與BRS分期結果之間呈正相關關系(r = 0.921,P < 0.01)。相比于單一指標與臨床康復分期量表取得了更好的相關性,而且對于康復結果的描述更為細化。因此,通過融合運動學和電生理信息,利用其互補性,既可以降低sEMG等生理信號的非平穩性,又可以融合運動學信號的穩定性,開發出具有良好的臨床相關性的定量評估系統。根據康復評估模型,該方法可以在線評估康復效果,進而根據評估結果調整康復處方,基于人體反饋對設備參數進行優化,更新下肢外骨骼訓練軌跡,實現“人在環中”的評估—訓練同步模式。
4 結論與展望
本文建立了一種基于協同特征的腦卒中后下肢康復步行活動能力評價指標體系,并對其與臨床下肢康復BRS量表分期的有效性進行了測試。結果顯示,該評分與標準臨床試驗BRS量表相關性較高。通過融合不同模態信息之間的互補性,該方法的生成結果既提高了臨床評估的準確性,也可輔助實現根據評估結果更新下肢外骨骼訓練軌跡。從臨床角度來看,該評估體系可以更好地適應臨床評估的應用,即通過對已知患者進行建模,并將其用于新入科的患者,進行BRS下肢分期評估,大大節省了康復醫師的評估時間,可提高康復醫師的工作效率,輔助其根據評估結果修改康復治療方案。
然而,本研究也存在一定的局限性。一方面對于協同指標特征的融合方法較為單一,后續將更深入研究模態融合算法以及應用深度學習等方法提高臨床康復評估的效果。另一方面,由于腦卒中后偏癱的患者在1期和2期幾乎無法進行下肢步行運動,而本試驗設計導致系統只能對3期及以上患者進行評估,故后續將調整試驗任務,以滿足更嚴重的腦卒中患者評估的要求。
未來,本研究將深入研究多傳感器融合和人機交互在康復領域的應用,將所提出的評估系統調整以適應于開發的下肢外骨骼機器人的訓練控制中,在臨床康復過程中根據康復功能評估數據指標可以判斷當前患者的運動障礙程度和下肢運動功能的恢復水平,進而分階段、有目的、周期性地修改康復機器人的助力策略,達到科學康復的目的;亦可考慮將其應用于家庭或社區環境中,為遠程康復訓練和評估提供潛在的方法。
重要聲明
利益沖突聲明:本文全體作者均聲明不存在利益沖突。
作者貢獻聲明:趙新剛、張弼負責項目主持、指導試驗設計;鐘旭負責數據分析、算法設計與論文寫作;李紀桅負責試驗數據采集;張亮、元香南、張鵬負責提供臨床試驗指導,患者試驗分析。
倫理聲明:本研究通過了遼寧省人民醫院機構倫理委員會的審批(批文編號:2022HS007)。
0 引言
研究分析顯示,由腦卒中疾病引起的傷殘數已經從1990年的第三位飆升到2017年的第一位,腦卒中已經成為危及國人健康和生活質量的最大病因之一[1]。有數據表明,神經系統功能的康復效果在發生功能障礙后3個月內較為顯著[2],在康復的窗口期如果不能得到周期性的有效康復治療,可能會導致肌肉的永久性損傷。在臨床康復治療過程中發現,通過康復醫師在康復窗口期的肌張力抑制性牽引、跟腱拉伸、直立床站立訓練、神經—肌肉電刺激等方法能夠糾正并增強患者的肌張力,提高患者對下肢的控制能力,從而一定程度上恢復下肢的運動能力[3]。據《中國衛生健康統計年鑒》的數據表明,2020年中國康復執業(助理)醫師數為4.9 萬人,按照2025年每10 萬人口配置康復醫師8 人的標準而言,目前仍然存在5.2 萬人缺口[4]。傳統康復治療機構以及相關治療醫師難以滿足日益增長的社會需求,康復機器人技術應運而生。
20世紀末和21世紀初,世界范圍內就已開啟了對外骨骼康復裝置的研究,研制出了如ReWalk[5](ReWalk Robotics Inc.,美國)、HAL[6](Cyberdyne Inc.,日本)、Lokomat[7](Hocoma Inc.,瑞士)等成品康復外骨骼系統。我國外骨骼康復機器人的研究起步較晚,但經過科研院所與企業的不斷創新,涌現了如大艾[8](北京大艾機器人科技有限公司,中國)、布法羅[9](布法羅機器人科技(成都)有限公司,中國)、程天科技[10](杭州程天科技發展有限公司,中國)等一大批性能優秀的外骨骼機器人且取得了較好的應用效果。從外骨骼康復機器人技術的角度來看,現有的機器人往往注重早期本體功能的實現,沒有個性化和定制化的服務,穿戴和適配繁雜,對于醫生和患者體驗感都較低;且助力控制模式的設定未實現康復流程的智能化[11],需要人為介入,運行效率低,目前難以廣泛應用于臨床。從機器人系統智能控制角度出發,如能實現“人在環中”的閉環控制[12-13],可以讓醫患減輕負擔,為外骨骼機器人康復流程智能化帶來更多可能。目前,各外骨骼機器人相關的臨床研究都具有專門性,缺乏統一的康復訓練進程和效果評估[11]。因此,人在閉環的康復評估—訓練模式下可能會取得較好的康復效果。通常,臨床評估是由有經驗的康復醫師使用圖表的分級或評分指標手動進行,如布魯恩斯特朗分期量表(Brunnstorm recovery stages,BRS)[14]、福格-邁耶評估量表(Fugl-Meyer assessment,FMA)[15]、運動評估量表(motor assessment scale,MAS)[16]等。這種半定量的評估方法費時費力,且具有人為主觀性。隨著康復醫學的發展,早期的一些臨床診斷評定已不能滿足日益發展的康復醫學的需要。目前更多研究采用客觀性的評定方法,如利用生物力學、神經電生理等來衡量康復效果[17-18],這相比于傳統的康復評定方法具有更高的客觀度并且可以一定程度上減少對康復醫師的依賴性。隨著康復機器人技術的發展,由康復機器人衍生的測量技術為評估運動功能增加了一個新的維度,可通過獲取患者的各項參數,彌補臨床上康復醫師肉眼難以觀測到的物理量,還可根據相應的參數評估當前的康復進程,為下一步的康復治療提供有力的依據[19-20]。
近年來,人們對腦卒中的神經生理學和生物力學進行分析以量化患者異常的嚴重程度[21]。其中,康復機器人如何輔助康復訓練后運動功能的定量評估成為研究的熱點[22-23]。Liparulo等[24]以單通道表面肌電(surface electromyography,sEMG)信號自動評估腦卒中患者的損傷水平,并生成量表分期的客觀分類結果,與臨床量表呈現相關性。研究人員設計了便攜式測量系統,通過測量關節加速度,建立基于極限學習機的集成回歸模型來評估上肢活動能力,可在臨床和家庭環境中使用[25-26]。Ye等[27]使用上肢sEMG數據建立基于反向傳播網絡的數據驅動評估模型,可以用來評估慢性腦卒中患者的上肢運動功能。Qian等[22]開發了一種基于機器人的力和軌跡特征的運動功能定量評估方法,以反映腦卒中患者運動功能的恢復。這些研究提高了康復評估的效度可靠性,也拓展了其應用場景,有助于康復機器人在臨床的推廣。另外,隨著計算機科學技術的發展,機器學習成為研究的熱點。關于使用機器學習方法進行運動評估的研究,一般將動作分為正確或錯誤的類別,這些方法的輸出是0或1的離散值(即正確或不正確),只定性而不能定量檢測不同水平的運動質量或識別患者表象的增量的變化,且構建模型較為復雜,對模型的訓練集有特殊的要求。應用過程中,當出現新的數據集時,需要對模型重新訓練,過程周期較長,難以適應臨床康復評估的實際應用場景[28]。對此,基于距離函數的模板匹配算法已成功應用于腦卒中后康復訓練里訓練動作的分類和評估[29],這種方法具有不需要訓練模型、無需大量數據、計算速度快等優點。為了建立一個客觀的評估系統,量化完成規定練習動作的正確程度對于開發支持家庭或遠程康復的工具和設備十分必要。現有研究中,運動評估通常是通過比較患者的運動表現與健康參與者的期望表現來完成的[30]。該過程中,采用距離函數調整偏差,如歐幾里得距離、馬哈拉諾比斯距離和序列之間的動態時間規整等[29],其優點是不針對特定的運動,因此可以用于評估新的運動類別。但是目前大部分研究僅僅使用單一傳感器[31],難以全面評估患者的康復情況,并且這些研究大多針對上肢康復訓練與評估,缺乏針對下肢康復訓練的研究數據。下肢行走是保證人類進行正常獨立生活的必要條件,盡早地幫助患者恢復運動功能和行走能力,對其身心恢復也具有重要作用[32]。因此,開發一種針對下肢外骨骼康復機器人的康復評估技術成為本研究需要關注的重點。
本文針對上述問題,提出一種面向下肢外骨骼的多模態傳感信息融合的偏癱患者下肢運動功能康復評估方法。如圖1所示,通過采集下肢sEMG和運動學信號,從運動學和電生理學角度全面分析患者的康復狀態,可以為患者個性化康復訓練提供可靠的依據,也可以作為直觀的反饋,以促進患者在有監督和無監督環境下的康復訓練。評估過程采用一種基于主成分分析(principal component analysis,PCA)運動數據相似度計算的方法來生成客觀一致的定量結果,以反映患者相對于預定義的模板的運動質量,從而體現肢體的康復程度。本研究還通過對不同程度偏癱患者的試驗來驗證所提出評估指標的效度和信度;并探討不同評分結果的差異是否具有統計學意義,以及所提出的評估指標與評分量表的相關性,再將與臨床量表相關的指標結果輸入建立的融合模型中得到機器評估結果。最終,期望本文研究方法結合臨床康復醫生的決策,可用于腦卒中患者的下肢外骨骼機器人輔助康復。
圖1
下肢康復評估系統流程
Figure1.
Process of lower limb rehabilitation assessment system
論文主要貢獻如下:① 根據下肢運動特性,構建協同量化指標作為下肢分類和評估的特征,驗證與臨床康復量表具有較高的相關性。② 構建運動學、電生理信息的多模態協同特征融合評估模型,驗證對于不同新患者而言本文模型的評估效果,期望能具有較好的泛化性,可應用于康復評估的臨床實際場景。③ 評估所需的sEMG傳感器和慣性測量單元(inertial measurement unit,IMU)傳感器是否使用簡單、穿戴便捷,以便在下肢外骨骼不附加多余傳感器的基礎上,實現“人在環中”的評估—訓練同步模式。
1 基于外骨骼的數據采集試驗范式
1.1 受試者信息
如表1所示,本研究從遼寧省人民醫院康復科招募了10名患有慢性腦卒中的偏癱患者(編號為S1~S10),遵循以下準則入組:① 年齡為18~78 歲之間,為首次發生缺血性或出血性中風。② 能夠主動或被動進行獨立行走,時長約1 min。③ 經BRS分期或FMA評分和精神狀態檢查,無嚴重的認知功能障。④ 患者下肢等目標肌群可檢測到自發性的sEMG信號。另招募10名正常發育的成年男性志愿者作為對照組,年齡(26.6 ± 2.6) 歲,身高(1.74 ± 0.08) m,體重(69 ± 10.9) kg,步態行走正常,無神經系統性疾病。在試驗之前,每位腦卒中患者都由一位經驗豐富的康復治療師進行量表評估分類,分類結果如表1所示。所有受試者均已簽署書面知情同意書。本文試驗過程遵循赫爾辛基宣言,并通過了遼寧省人民醫院倫理委員會的倫理審核批準(批件號:2022HS007)。
1.2 監測肌群的選擇
偏癱患者的脛骨前肌(tibialis anterior,TA)肌力小于正常人且作用時間短,導致踝關節背屈不足,作用時間僅限于足跟落地的短時間內,且支撐中期偏癱患者的腓腸肌和比目魚肌力均小于正常人[33-34]。如圖2所示,本文選取以下8塊肌肉將8個電極放置在肌肉表面:TA、腓骨長肌(peronaeus longus,PL)、外側腓腸肌(lateral gastrocnemius,LG)、股內側肌(vastus medialis,VM)、股直肌(rectus femoris,RF)、股外側肌(vastus lateralis,VL)、半腱肌(semitendinosus,ST)、股二頭肌(biceps femoris,BF)。
圖2
受試者信號采集
Figure2.
Subject signal acquisition
1.3 信號采集與處理
下肢外骨骼使用本課題組開發的康復機器人,如圖2所示,其基于仿生的剛柔耦合結構,可實現下肢矢狀面雙側六關節的全自由度主動驅動,對具有運動功能障礙的受試者可實現人機復雜交互場景下的準確力/位跟蹤與主動輔助力矩生成;利用多傳感信息與平衡控制器對人機交互意圖、平衡異常狀態進行估計,能夠預規劃多模場景下人體下肢運動狀態,確保人機系統間協同交互的柔順性。而且,為了增強不同康復時期患者下肢肌肉的運動能力,還可采取主動訓練和被動訓練相結合的康復策略。其中,外骨骼機器人采用如圖3所示的下肢髖、膝、踝關節助力曲線,不同助力模式對應四種步態曲線,可覆蓋下肢BRS 3期~ BRS 6期運動功能障礙者的康復訓練[35]。所有受試者可在外骨骼訓練過程中實現信號采集與評估。本研究利用訓練過程中的10個步態數據進行評估分析,其中基準模板為所有對照組受試者的平均數據。
圖3
外骨骼助力曲線
Figure3.
The power curve of the exoskeleton
sEMG數據采集設備為Noraxon Ultium系統(NORAXON Inc., 美國)。采用氯化銀(AgCl)材質的電極片,每個通道的兩個電極間隔20 mm 粘貼在受試者雙腿的目標肌肉沿肌肉纖維方向的肌腹[36]。運動學信號采用myoMOTION (NORAXON Inc.,美國)的IMU,采集下肢髖、膝、踝關節矢狀面的角度變化,如圖2所示,分別為IMU 1~IMU 4,測量髖關節角度為θ1、和膝關節角度為θ2、和踝關節角度為θ3。受試者按前述方法佩戴傳感器,穿著外骨骼,同步采集訓練的sEMG信號和運動角度信號。
由于原始的sEMG信號中存在大量的噪聲信號[37],而其頻率范圍在0~500 Hz[38],所以本文需對原始sEMG信號進行濾波去噪處理。記錄采樣頻率為2 000 Hz的原始sEMG信號,經高通濾波(巴特沃斯,25 Hz,5階)、整流和低通濾波(巴特沃斯,5 Hz,5階)進行歸一化處理[39-40]。運動角度信號的采樣頻率為200 Hz,不需進行預處理。
1.4 連續步態周期劃分
本試驗采用患者穿戴外骨骼訓練后最常見的每個步行動作為樣本,以測試受試者的下肢活動能力。由于步態分析需要以周期為單位進行研究,因此首先要確定步態的起始點,進而劃分步態周期,截取每個步態周期所對應的多通道數據用于下一步分析。如圖4所示,一個完整的步態是由足跟落地、足掌落地、足跟離地、腳趾離地四個典型的步態事件組成的一個完整的步態周期[41]。其中,支撐期為足跟落地至腳趾離地,約占步態周期的60%,擺動期為腳趾離地至二次足跟落地,約占步態周期的40%。該過程與患者穿戴外骨骼進行的訓練動作相吻合,可直接使用在下肢外骨骼系統上。步態起始時間S(t)的定義如式(1)所示:
圖4
下肢步態周期劃分
Figure4.
Cycle division of lower limb gait
|
其中, 為足部的俯仰角大小,其峰值為步態周期的開始[41];max(·)代表最大值函數;t代表步行時間;采樣樣本為連續10個步態周期的數據。
2 基于肌肉協同理論的下肢運動量化方法
2.1 肌肉協同提取
肌肉協同(muscle synergy)被認為是中樞神經系統產生協調運動的一種優化的控制策略[42],現已有足夠的經驗證據支持肌肉協同分析在評估腦卒中康復效果時的潛在效用[43]。研究人員發現,在發育正常的健康人的下肢運動步態分析中,肌肉協同模式具有高度的一致性[44]。即使在一些需要學習的專業運動員訓練動作中,研究人員也證實肌肉協同作用在受試者之間是一致的[45]。這些研究揭示了肌肉協同是神經肌肉協調控制的普遍機制,同時也為康復運動功能障礙分析提供了新的思路。肌肉協同可以用肌肉運動所產生的sEMG信號隨時間變化的模式來定量分析。已有一些分解算法,如因子分析、非負矩陣分解、PCA等,被用于將多通道sEMG數據分解為更小的高代表性變量集[46]。協同分解的基本數學模型如式(2)所示:
|
其中,給定矩陣Mn· t可分解為反映空間特征的協同元矩陣Wn· k和反映時序特征的激活系數矩陣Hk· t,E為誤差矩陣,可忽略不計。n為信號的通道個數,t為樣本的數量,k為協同元個數,T為轉置符號,i為矩陣個數。
典型的協同提取方法是矩陣分解,將原始數據投影到較低維空間中,同時保留代表性信息。本文采用的PCA是一種特征提取的經典統計技術,適用于包含冗余信息的數據集,廣泛用于模式識別和計算機視覺等領域[47-48]。它尋求一個線性正交變換W矩陣,將獲取的數據X矩陣轉化為隱藏的低維變量矩陣Z,如式(3)所示:
|
其中,矩陣Z的每個元素獲得方式,如式(4)所示:
|
其中,zij為低維矩陣Z的元素,wi為其正交向量,xj為特征向量,T為轉置符號。為了得到正交向量wi,將損失函數J設為變換后方差的最大值,如式(5)所示:
|
其中, 表示xj的平均值,A為X的協方差矩陣。損失函數J在wi上等于S的r個最大特征值的特征向量。本文使用奇異值分解(singular value decomposition,SVD)用于獲取特征值σi和對應的特征向量ui,之后得到正交矩陣W。由此,可以計算出式(3)中的Z。本文中X為預處理后的t·n維sEMG數據(t為一個步態周期的采樣點個數,n為8 個通道),W為n·k維的正交變換矩陣(k為肌肉協同元個數),Z為k·m維的變換數據。經SVD后得到的特征值和特征向量用于計算相似度。在Ivanenko等[44]的研究中,人步行時的下肢肌肉可以分為5個協同模式,因此在本文中的協同元k設為5。
2.2 協同量化
對于運動數據 ,其中n是提取的分割步態的數量, 是其中一個步態的數據。經PCA分解后,即有協同向量ui、vi,對應特征值σi 、δi,如式6所示。在高維的空間中,如果兩個運動是相似的,那么其運動軌跡應是相似的。因此,如果對應的運動相似,運動數據矩陣應該具有相似的幾何結構[49]。本研究利用PCA算法進行協同分解,生成運動矩陣的特征向量,并利用這些特征向量對相應的運動數據進行索引或分類。
|
如果兩個運動相似,其對應的協同向量u1和v1應該在幾何上基本平行[49],即有 。θ為兩個協同向量u1和v1之間的夾角。為了評價患者的康復程度,如式(7)所示,本文使用加權相似度度量方法[50]來計算每段sEMG數據和運動數據與基準模板的相似程度,以定量評估患者的康復狀態。
|
其中,n為特征值數量,B為依據對照組建立的基準數據,P為受試患者數據。σi、λi為基準數據和受試數據的第i個特征值,對應于第i個協同向量ui、vi。因此,相似性度量僅為兩個運動矩陣的協同向量和對應的特征值,而不包含來自其他運動數據矩陣的任何貢獻。其可捕獲分解的k個協同向量的相似程度,并由對應的特征值加權計算。φ 的范圍在0~1之間。越接近于1,證明患者與對照組的模板越相似,即康復狀態越好。
2.3 模態融合評估模型
根據BRS分期的定義[14],分期的主要區別是協同模式和獨立關節的運動模式不同,強調整個恢復過程逐漸向正常、復雜的運動模式發展,從而達到中樞神經系統重新組合的效果。這在使用單一傳感器測量時可能不明顯,需要額外的特征來進一步區分每個具體運動的模式分期[31]。因此,為了證明所提出協同特征的適用性,本文構建電生理和運動學的融合協同向量Fi如式(8)所示:
|
其中,Ei為電生理協同特征,Ki為運動學協同特征,n為協同特征個數。采用有監督的機器學習模型,可以得到受試者下肢康復的預測分數Si,如式(9)所示:
|
其中,M選取K近鄰(k- nearest neighbor,KNN)、隨機森林(random forest,RF)、多層感知機(multilayer perceptron,MLP)、支持向量回歸(support vector regression,SVR)四種機器學習模型[18]。在KNN模型中取最近鄰數為5,設特征空間X是n維實數向量空間,(xi,xj)∈X,xi =(xi(1),xi(2),···,xi(n)), xj=(xj(1),xj(2),···,xj(n))。(xi, xj)的距離函數L,采用如式(10)所示的歐幾里得距離:
|
其中,l為特征空間X的維數。
MLP定義為多層前饋神經網絡,隱藏層設置為130 個神經元,輸出層選取線性整流函數(rectified linear unit,ReLU)作為激活函數。為了優化權重和偏置,在神經網絡中采用擬牛頓法(quasi-Newton)的優化器來加快收斂速度和效果;設置RF最大的樹深為5,基評估器的數量為10;SVR采用徑向基函數為核函數。Si為模型的輸出,評估分數對應模型輸出,為連續的分數,因此比傳統的分類評估更精細化。為了評估模型綜合不同等級患者數據的能力,適應新患者的在線康復評估,體現融合評估模型的泛化性能,由100個試驗樣本組成的完整數據集被分為訓練集和測試集。訓練數據集從6個個體中收集60 個試驗樣本,其余4 個個體樣本被劃分為測試數據集。
3 試驗結果及分析
3.1 健患側比較分析
BRS 3期受試者健、患側協同元權重對比如圖5所示。其中1~5為分解出的五個協同元肌肉激活權重。其范圍為0~1,表示肌肉激活權重由小到大。圖5可以看出,由于偏癱后部分肌肉萎縮導致sEMG信號活躍度較低,患側權重普遍比健側權重低。但是BRS 3期患者的PL患側激活權重比健側高,這可能是由于PL痙攣導致下肢肌張力偏高。
圖5
健患側協同元權重對比
Figure5.
Comparison of synergies weights in the affected and contralateral side of patients
從患者身上采集的運動樣本量表BRS 6期和BRS 3期主體如圖6所示。BRS 6期的患者有能力完成獨立行走,并且相關參數和正常人保持一致。然而,由于腦卒中引起的下肢疼痛和肌肉控制受損,BRS 3期的樣本往往是不穩定的。具體而言表現為,由于髖屈肌無力,患者髖關節的活動范圍明顯降低。由于膝關節屈肌無力,受影響的膝關節在站立或擺動階段都不能正常彎曲,抬腿的幅度較小導致膝關節的屈曲角度偏小。通常,踝關節的最大足底屈曲是在步態周期的起始階段產生的,但由于膝關節屈曲角度降低,患側足難以踏出地面,因此足底沒有明顯屈曲。此外,由于患者在擺動期未能充分抬起患側的腳前掌,最初的接觸表現為平足接觸地面,而不是足跟落地。
圖6
受試者下肢角度對比
Figure6.
Comparison of lower limb angle data of subjects
綜上所述,患側肢體主要表現為在擺動階段屈伸運動減弱,患者下肢肌肉力量的缺失,導致行走的靈活性和穩定性的不足,在支撐階段不能很好地單獨支撐身體重量。通過對sEMG信號和關節角度的分析,可以揭示偏癱患者的行走能力在關節運動范圍上是如何受限的。BRS 3期患者由于關節靈活性的限制和出現的肌肉痙攣現象,導致運動總是提前終止或者偏離正常角度。這些都可以很直觀地反映出患者組下肢行走活動能力的局限性。
3.2 協同指標特性分析
本文將10名患者分為4個BRS分期。如圖7所示,不同BRS分期的患者的協同指標特征差異均具有統計學意義(獨立樣本t檢驗:P < 0.01)。協同特征在不同BRS分期中的對比分布情況如圖7所示,sEMG協同特征在BRS 6期和3期分布較為集中。在BRS 5期中由于患者S7肌肉痙攣比較明顯,導致sEMG協同特征相較于對照組模板對比差異較大,出現了兩個異常的值。但是,在同期的運動學指標中數據分布較為穩定。相反在運動學指標中,BRS 3期患者組數據分布差異較大,且與對照組差異波動范圍較大,達到0.102~0.648,這可能是因為患者S6主訴為右側肢體活動不能伴有言語不能,且該患者發病時間剛滿一個月導致下肢的肌肉控制情況不理想,因此有少量行走不佳的運動樣本。BRS 3期患者由于患有嚴重運動功能障礙和過高的痙攣性肌張力,他們的運動學和肌電的協同指標特征也相對較低。然而,本試驗中的BRS 6期患者的標準差都遠小于BRS 3~5期偏癱患者,因此不管sEMG還是運動學協同指標特征都表現得比較穩定和集中,說明BRS 6期患者在下肢步行運動時肌肉控制能力和角度曲線都相對穩定,比較接近正常健康人水平。
圖7
協同指標的數據分布關系
*
*
總體來說,不管是sEMG還是運動學協同指標,在特征分布上都符合BRS分期的特點。如圖7所示,BRS 3~6期的患者組sEMG指標的25%~75%位數分別在0.37~0.48、0.56~0.77、0.71~0.80、0.92~0.97范圍內;運動學指標3~6期受試者25%~75%位數分別在0.17~0.56、0.55~0.75、0.78~0.87、0.93~0.96范圍內。僅sEMG指標,在BRS 4期和5期有部分重疊,其原因可能是4期和5期受試者接受訓練時間較長,恢復狀況較好,導致電生理層面差異較小。其余各分期受試者的指標范圍較少有重疊的部分,說明該指標可以較好地根據建立的健康基準模板進行無監督的康復量表分期。如表2所示,為每位患者的sEMG指標和運動學指標的中位數、平均值、25%~75%差值。
3.3 融合結果分析
為了更好地評估兩種指標與臨床BRS分期量表的相關性,如式(11)所示,計算sEMG指標和運動學指標與臨床量表的相關系數,檢驗水準為0.05。
|
其中,Xi、Yi分別是所提協同指標和臨床量表對應i的值,、 分別為Xi、Yi的平均值,n為樣本數量,r為計算出的相關系數。
如圖8所示,運動學指標與BRS分期之間的相關性為r = 0.825(P < 0.01),sEMG指標與BRS分期之間的相關性為r = 0.799(P < 0.01)。結果顯示,電生理層面和運動學層面的兩項協同指標都與臨床評估量表有較強的相關性。為了驗證所提出協同指標的效度和信度,將融合特征輸入幾種機器學習模型中,得到評估分數。使用95%置信區間進行皮爾遜(Pearson)相關檢驗來分析單模態與多模態融合模型和BRS分期之間的相關性,結果如表3所示。
圖8
協同指標與臨床量表的相關性檢驗
Figure8.
Correlation test between synergy index and clinical scale
結果顯示,單模態運動學的相關系數比單模態sEMG更接近于1;sEMG信號由于受試者個體差異,因而具有非平穩性和個體差異性,其結果都較低于單模態運動學。但是無論何種模型,其多模態特征融合都展示出了更高的相關系數。相比于其他三種算法,KNN表現出了良好的評估性能,其原理為計算測試與訓練樣本集中每個樣本的歐幾里得距離,即在特征空間中的K個最相鄰樣本屬于某一個類別,則該樣本也屬于這個類別,這與模板匹配產生的協同特征指標思想基本一致,都為計算相似度,所以輸入的協同融合向量在KNN模型中得到了最好的結果。如圖8所示,所提出的融合特征指標與BRS分期結果之間呈正相關關系(r = 0.921,P < 0.01)。相比于單一指標與臨床康復分期量表取得了更好的相關性,而且對于康復結果的描述更為細化。因此,通過融合運動學和電生理信息,利用其互補性,既可以降低sEMG等生理信號的非平穩性,又可以融合運動學信號的穩定性,開發出具有良好的臨床相關性的定量評估系統。根據康復評估模型,該方法可以在線評估康復效果,進而根據評估結果調整康復處方,基于人體反饋對設備參數進行優化,更新下肢外骨骼訓練軌跡,實現“人在環中”的評估—訓練同步模式。
4 結論與展望
本文建立了一種基于協同特征的腦卒中后下肢康復步行活動能力評價指標體系,并對其與臨床下肢康復BRS量表分期的有效性進行了測試。結果顯示,該評分與標準臨床試驗BRS量表相關性較高。通過融合不同模態信息之間的互補性,該方法的生成結果既提高了臨床評估的準確性,也可輔助實現根據評估結果更新下肢外骨骼訓練軌跡。從臨床角度來看,該評估體系可以更好地適應臨床評估的應用,即通過對已知患者進行建模,并將其用于新入科的患者,進行BRS下肢分期評估,大大節省了康復醫師的評估時間,可提高康復醫師的工作效率,輔助其根據評估結果修改康復治療方案。
然而,本研究也存在一定的局限性。一方面對于協同指標特征的融合方法較為單一,后續將更深入研究模態融合算法以及應用深度學習等方法提高臨床康復評估的效果。另一方面,由于腦卒中后偏癱的患者在1期和2期幾乎無法進行下肢步行運動,而本試驗設計導致系統只能對3期及以上患者進行評估,故后續將調整試驗任務,以滿足更嚴重的腦卒中患者評估的要求。
未來,本研究將深入研究多傳感器融合和人機交互在康復領域的應用,將所提出的評估系統調整以適應于開發的下肢外骨骼機器人的訓練控制中,在臨床康復過程中根據康復功能評估數據指標可以判斷當前患者的運動障礙程度和下肢運動功能的恢復水平,進而分階段、有目的、周期性地修改康復機器人的助力策略,達到科學康復的目的;亦可考慮將其應用于家庭或社區環境中,為遠程康復訓練和評估提供潛在的方法。
重要聲明
利益沖突聲明:本文全體作者均聲明不存在利益沖突。
作者貢獻聲明:趙新剛、張弼負責項目主持、指導試驗設計;鐘旭負責數據分析、算法設計與論文寫作;李紀桅負責試驗數據采集;張亮、元香南、張鵬負責提供臨床試驗指導,患者試驗分析。
倫理聲明:本研究通過了遼寧省人民醫院機構倫理委員會的審批(批文編號:2022HS007)。