動物定位與軌跡追蹤對于大腦空間認知和導航神經機制研究具有重要價值,但是傳統光學鏡頭視頻定位技術受攝像頭視角范圍等因素的影響,定位與軌跡追蹤的范圍有限。針對具有卓越空間認知和導航能力的鴿子,基于燈塔定位技術,提出了一種適用于室內大空間的三維軌跡定位與追蹤方法,并給出了相應的定位原理與硬件組成。離體和在體實驗研究結果表明,該系統可以在長 × 寬 × 高為 360 cm × 200 cm × 245 cm 空間中對鴿子實現誤差厘米級的定位與軌跡追蹤。與傳統光學鏡頭視頻定位技術相比,該系統具有大空間、高精度、高響應優點,不僅有助于鴿子三維空間認知與導航神經機制的研究,而且對于其他動物的軌跡追蹤也具有較高參考價值。
引用本文: 劉新玉, 劉凱歌, 彭緩緩, 秦月, 齊小敏, 王東云, 溫盛軍. 室內大空間鴿子三維定位與軌跡追蹤. 生物醫學工程學雜志, 2024, 41(4): 715-723. doi: 10.7507/1001-5515.202401064 復制
版權信息: ?四川大學華西醫院華西期刊社《生物醫學工程學雜志》版權所有,未經授權不得轉載、改編
0 引言
大腦空間認知與導航與自然界中動物的生存和日常生活息息相關。作為腦科學研究的熱點問題,空間認知與導航機制的解析一般離不開兩個關鍵數據:一是連續獲取的動物位置數據;二是與位置數據同步采集的大腦相關腦區神經元放電信號[1]。利用這兩個數據就可以進一步解析大腦是如何表征導航空間以及如何在復雜環境中完成路徑規劃和導航的。但是目前的大腦空間認知和導航機制解析主要集中在二維平面[2-3],對于三維空間的研究還較少。三維空間相對于二維平面不僅增加了神經信號采集的難度,更重要的是在軌跡數據上增加了高度信息,極大地提高了軌跡獲取的難度。因此,獲取三維空間,尤其是室內大空間動物運動的三維軌跡數據,對于解析大腦空間認知與導航機制具有較高實用價值。
腦科學研究中對動物的定位精度要求較高,而動物背負能力有限且其合作性差,使得其運動軌跡的獲取相對于無人機或其他人造設備難度更大。傳統的定位方法包括衛星定位、基站定位、慣性導航定位等[4]大多是針對室外環境的,定位精度達不到室內動物位置定位的需求,因此基于光學鏡頭的視頻追蹤定位成為室內動物定位的首選。光學鏡頭視頻定位是通過圖像處理算法將視頻文件或實時錄制視頻中的動物與背景區分開來,以實現動物的位置獲取和軌跡追蹤[5-6]。利用單/雙光學鏡頭可以獲得動物二維/三維運動軌跡,但是由于受到光學鏡頭視場角的限制,標準攝像頭能夠追蹤到的動物活動范圍較小,而且隨著追蹤區域的擴大,追蹤的成本和需要的場地也會呈指數增加,對于鴿子等具有三維大范圍活動空間的動物軌跡追蹤而言,現有軌跡追蹤設備的能力和性價比都難以滿足實際需求。
針對室內大空間中鴿子三維軌跡的定位和追蹤,本文提出了一種基于燈塔(lighthouse)定位技術的動物軌跡獲取方法,彌補了傳統光學鏡頭視頻追蹤定位方法在室內大空間定位中的不足。燈塔定位技術的原理是利用掃描激光面對空間物體進行編碼進而對物體進行定位和追蹤[7],具有高精度、高響應、低成本的優點,由于它在虛擬現實領域中呈現出優異性能而得到了關注,之后被推廣到無人機等設備的室內定位和軌跡追蹤中[8-9]。燈塔定位技術不同于傳統的光學鏡頭視頻定位,不需要借助攝像頭,而是利用激光和光敏傳感器來確定運動物體的位置,定位精度可以達到毫米級且沒有時間延遲[10]。本研究將該技術擴展到了鴿子三維軌跡追蹤中,通過在體和離體實驗驗證了該技術的性能。
1 材料與方法
由于大腦空間認知和導航機制解析需要動物個體的位置數據和大腦的神經信號,因此本文中固定在鴿子頭部的追蹤器集成了神經信號采集和位置定位兩種功能,但是此處主要側重于追蹤器中位置定位功能的描述,其神經信號采集功能將另文介紹。
1.1 鴿子燈塔三維定位硬件結構
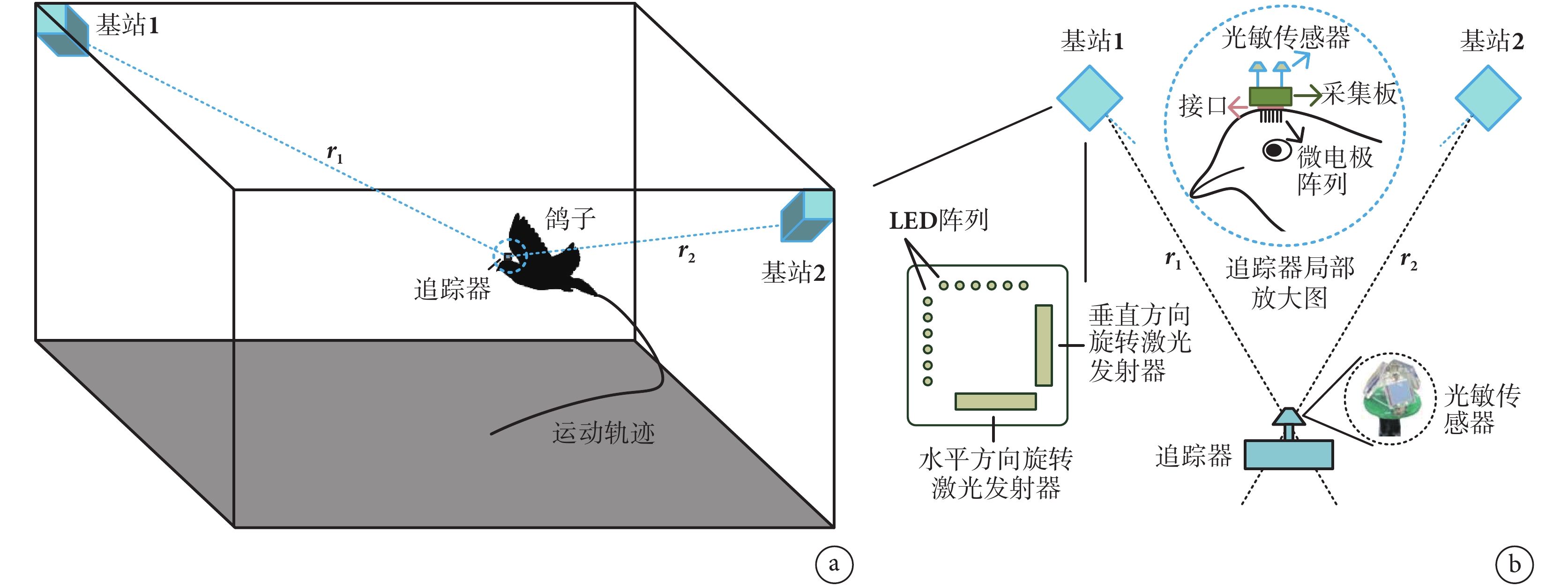
鴿子三維燈塔定位系統由兩個激光基站(HTC Corporation,中國臺灣)和一個追蹤器組成。兩個激光基站需要對角安裝在動物活動區域的頂部,追蹤器固定在鴿子頭部,如圖1a所示。每個激光基站內部有一個紅外發光二極管陣列(light emitting diode,LED)和兩個轉軸互相垂直的旋轉紅外激光發射器,如圖1b所示。紅外LED陣列用于產生與追蹤器同步的信號,兩個紅外激光發射器分別產生水平方向和垂直方向的扇形激發掃描面,以確定追蹤器的位置。追蹤器上有兩個光敏傳感器組,每個光敏傳感器組利用3個光敏傳感器(TEMD5110X01)組成一個菱形結構的燈塔以獲得最佳的紅外信號接收。具體地講,鴿子三維燈塔定位系統就是通過安裝在空間頂部的基站將紅外線投射到房間中,然后由固定在鴿子頭部的追蹤器捕捉這些紅外線以精確確定物體在三維空間中的位置。
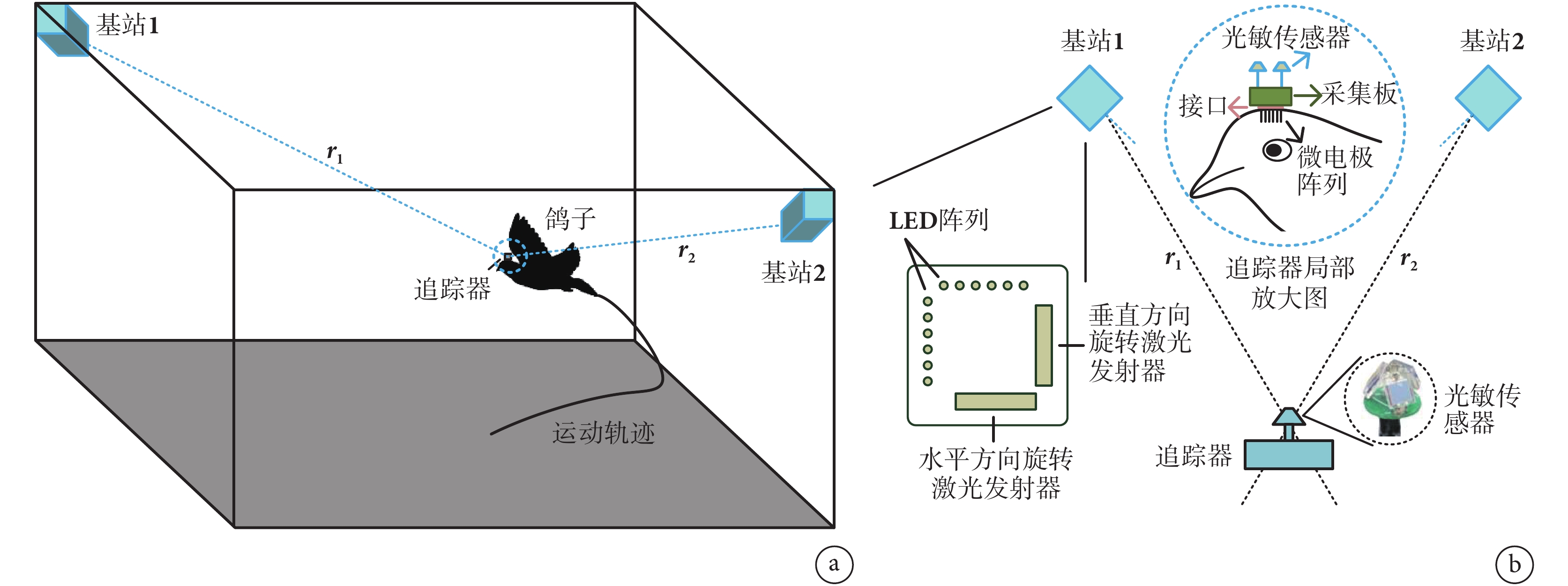 圖1
鴿子燈塔三維定位原理及硬件組成
圖1
鴿子燈塔三維定位原理及硬件組成
a. 燈塔定位原理示意圖;b. 燈塔定位系統硬件組成及工作示意圖
Figure1. The principle and hardware composition of lighthouse three-dimensional positioning of pigeona. schematic diagram of lighthouse positioning principle; b. hardware composition and working diagram of lighthouse positioning system
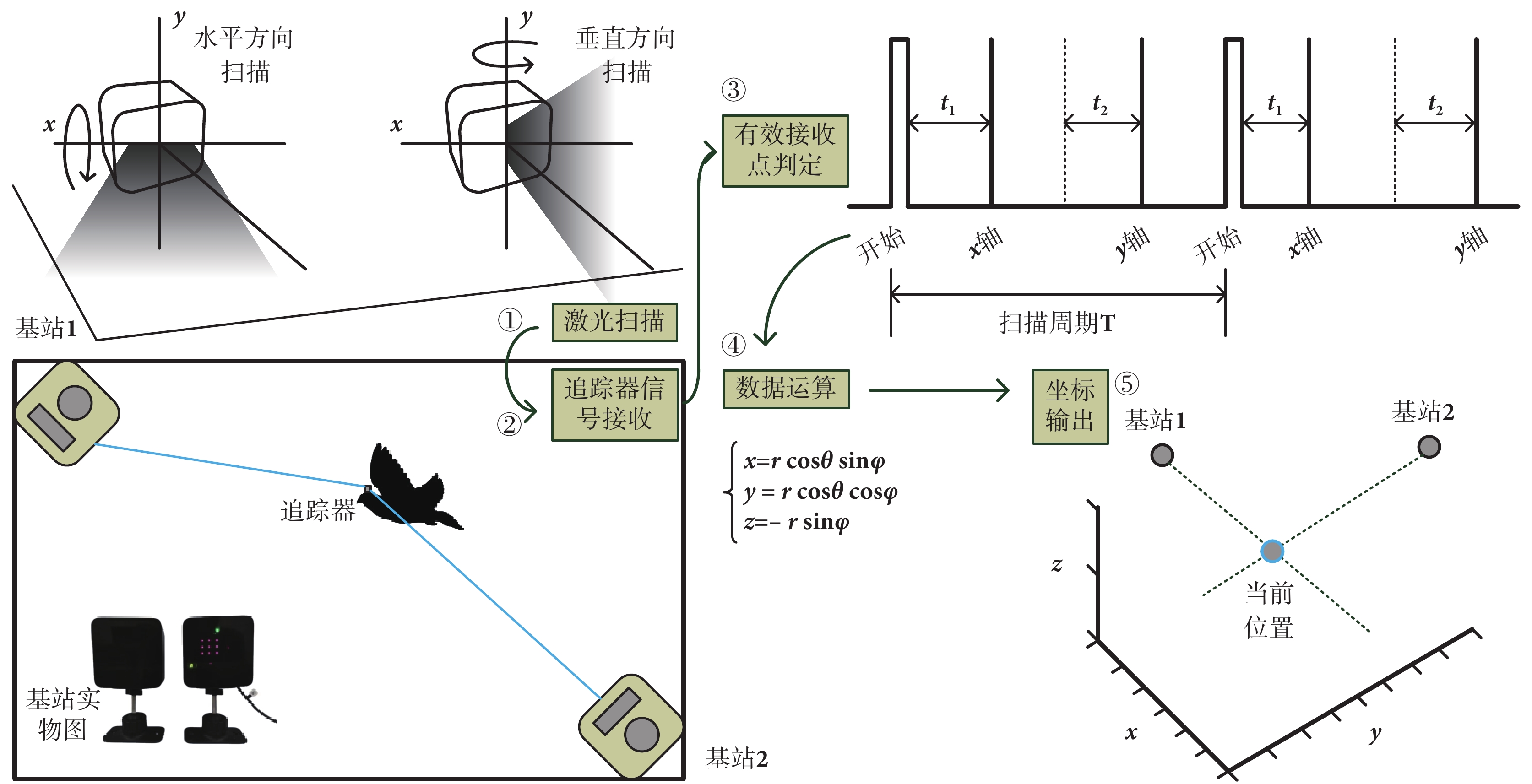
紅外激光發射器的轉速為10 ms一圈,實際運行時兩個紅外激光發射器交替工作,20 ms為一個周期[11]。循環開始時紅外LED陣列閃光作為同步信號,然后水平方向旋轉紅外激光發射器圍繞x軸掃描整個空間(簡稱x軸激光),接著垂直方向旋轉紅外激光發射器圍繞y軸掃描整個空間(簡稱y軸激光)。在激光基站的LED陣列發出同步信號后,追蹤器上的光敏傳感器可以測量出x軸激光和y軸激光分別到達傳感器的時間。追蹤器根據這個時間就可以計算出旋轉紅外激光發射器在x軸和y軸上的旋轉角度,根據旋轉角度就可以獲得基站與追蹤器之間的向量r1和r2,兩個向量的交叉點即追蹤器的位置,如圖1b所示。
1.2 鴿子燈塔三維定位軟件算法
根據鴿子燈塔三維定位系統硬件的工作過程可知,軌跡定位需要經過基站激光掃描、追蹤器信號接收、有效接收點判定、數據運算、坐標輸出等五個步驟,如圖2所示。其中數據運算是位置定位的難點,下面將詳細給出利用旋轉紅外激光發射器的旋轉角度獲得空間位置的核心步驟。
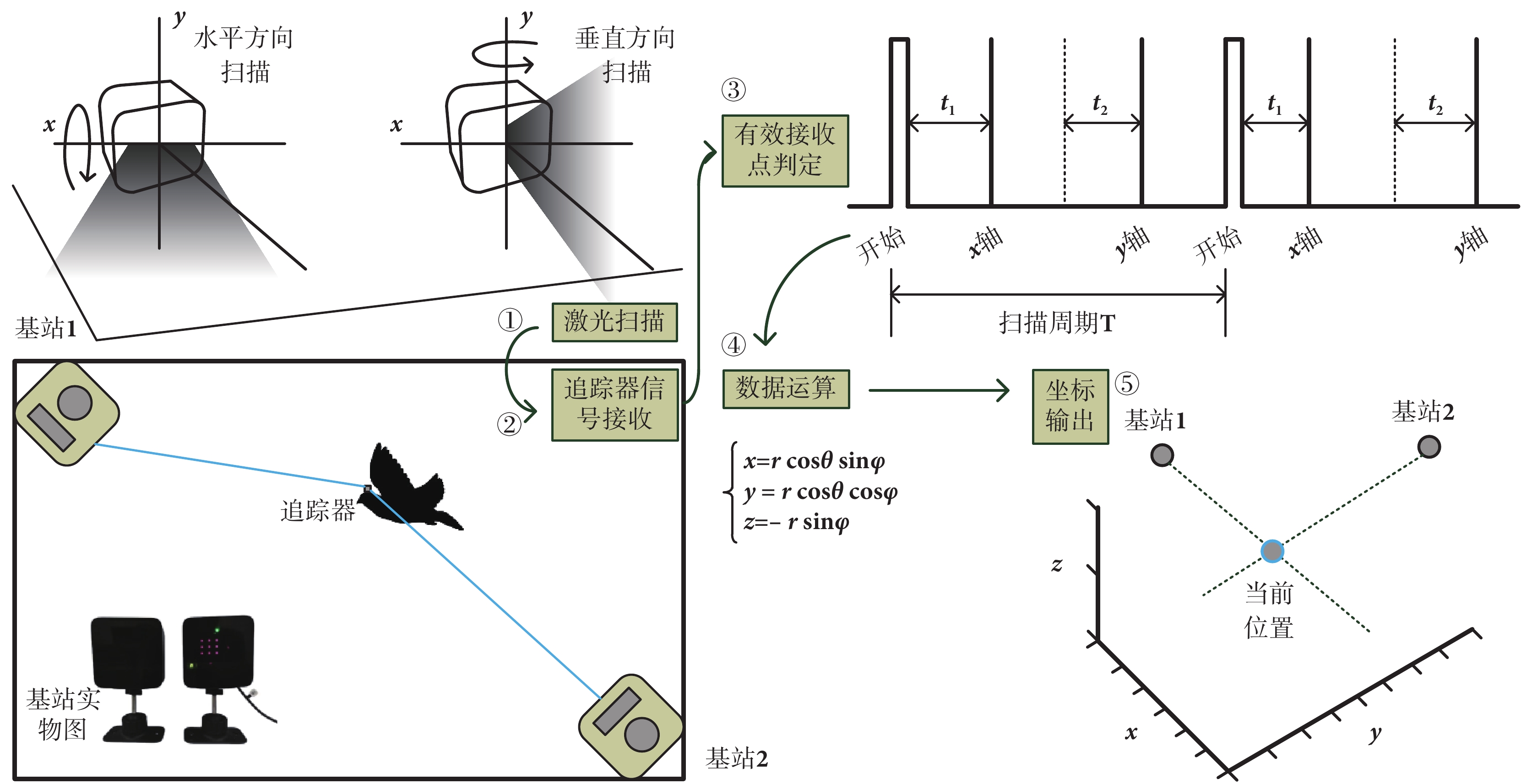 圖2
鴿子燈塔三維定位計算流程示意圖
Figure2.
Calculation process of pigeon lighthouse three-dimensional positioning
圖2
鴿子燈塔三維定位計算流程示意圖
Figure2.
Calculation process of pigeon lighthouse three-dimensional positioning
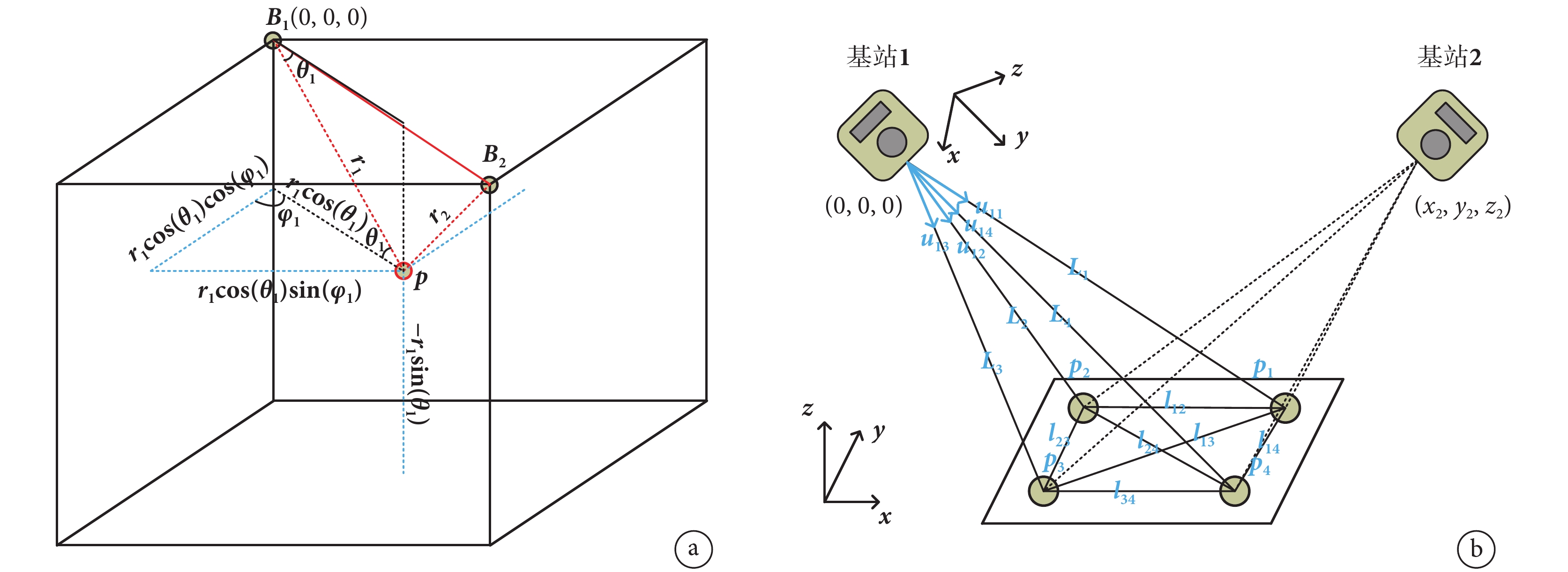
在鴿子燈塔三維定位中,目標是要獲得鴿子當前位置p的三維坐標,假設為 ,已知量為兩個基站在x平面和y平面的旋轉角度(由時間確定),分別假設為
,已知量為兩個基站在x平面和y平面的旋轉角度(由時間確定),分別假設為 和
和 。換句話說,利用
。換句話說,利用 和
和 求出p點坐標
求出p點坐標 是求解目標。假設基站
是求解目標。假設基站 的坐標為
的坐標為 ,如果已知
,如果已知 點與p點之間的距離
點與p點之間的距離 ,即
,即 ,如圖3a所示,則p點坐標為:
,如圖3a所示,則p點坐標為:
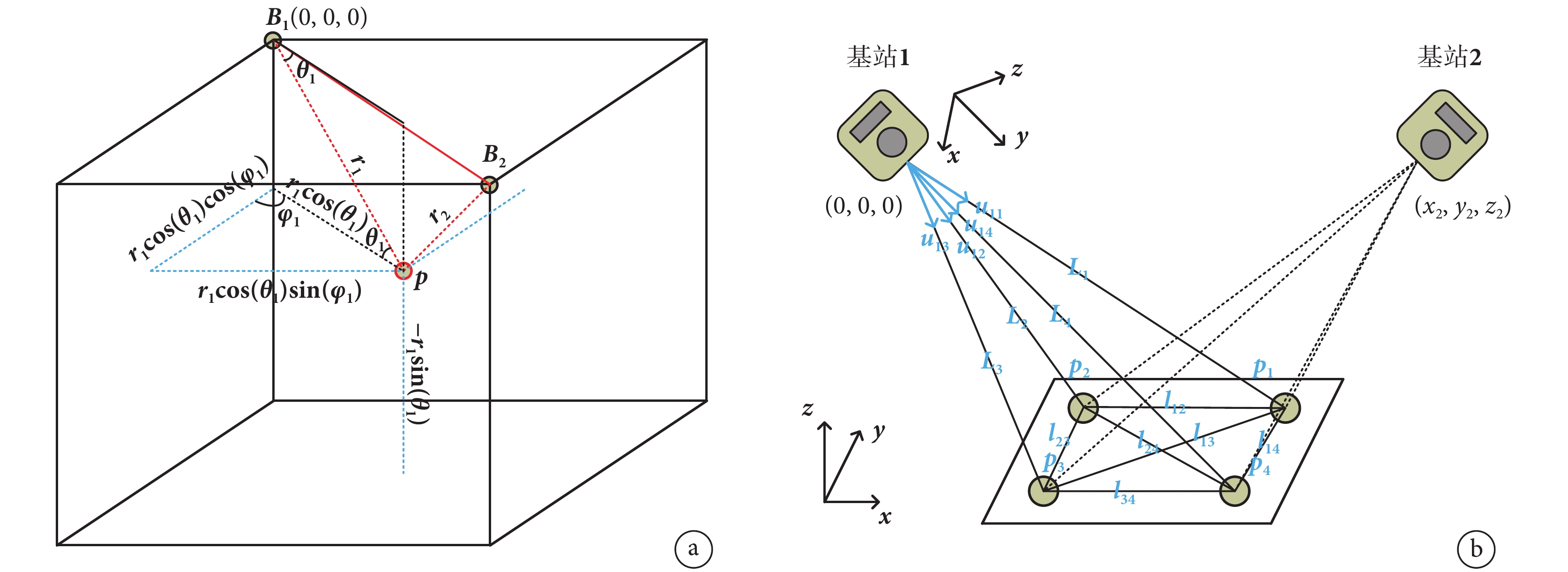 圖3
鴿子燈塔三維定位系統校準示意圖
圖3
鴿子燈塔三維定位系統校準示意圖
a. 鴿子當前位置求解示意圖;b. 系統校準示意圖
Figure3. Calibration diagram of pigeon lighthouse three-dimensional positioninga. schematic diagram for solving the current position of pigeons; b. system calibration diagram
 |
公式中 和
和 為基站
為基站 的旋轉角度,為已知量,因此如何獲得
的旋轉角度,為已知量,因此如何獲得 是求解的關鍵。要獲得
是求解的關鍵。要獲得 ,需要知道基站
,需要知道基站 和
和 之間的長度以及它們之間的夾角
之間的長度以及它們之間的夾角 和
和 。獲得基站
。獲得基站 和
和 之間的長度則需要知道
之間的長度則需要知道 和
和 的坐標,定位
的坐標,定位 和
和 其實就是一個校準的過程,如圖3b所示。
其實就是一個校準的過程,如圖3b所示。
通俗地講,鴿子燈塔三維定位系統的校準也是一個坐標轉換的過程,就是將基站坐標轉換為大地坐標。在校準過程中,需要額外的校準板進行輔助。校準板上有四個光敏傳感器作為四個待定位的空間位置,定義為 、
、 、
、 和
和 ,四個位置之間的距離已知,定義為
,四個位置之間的距離已知,定義為 、
、 、
、 、
、 、
、 和
和 。此外,假設基站
。此外,假設基站 的坐標為
的坐標為 ,基站
,基站 的坐標為
的坐標為 。校準時未知的量為基站與這四個位置之間的距離以及它們與基站之間的夾角,定義為
。校準時未知的量為基站與這四個位置之間的距離以及它們與基站之間的夾角,定義為 、
、 、
、 和
和 ,
, 、
、 、
、 、
、 、
、 、
、 。根據余弦定理,利用上述距離和夾角可以得到以下六個等式[9]:
。根據余弦定理,利用上述距離和夾角可以得到以下六個等式[9]:
 |
如果能獲得 、
、 、
、 、
、 、
、 和
和 ,根據式(2)中六個公式就可以求得四個未知量
,根據式(2)中六個公式就可以求得四個未知量 、
、 、
、 和
和 。
。
假設向量  、
、 、
、 、
、 且為各個向量的單位向量。以
且為各個向量的單位向量。以  計算為例,根據向量的點積定義,向量
計算為例,根據向量的點積定義,向量  和
和  的點積為:
的點積為:
 |
由于式中 和
和 為單位向量,即
為單位向量,即 ,
, 1,可得:
1,可得:
 |
因此獲得

 和
和 的單位向量即可求得cosθ12、cosθ13、cosθ14、cosθ23、cosθ24和cosθ34的值。
的單位向量即可求得cosθ12、cosθ13、cosθ14、cosθ23、cosθ24和cosθ34的值。
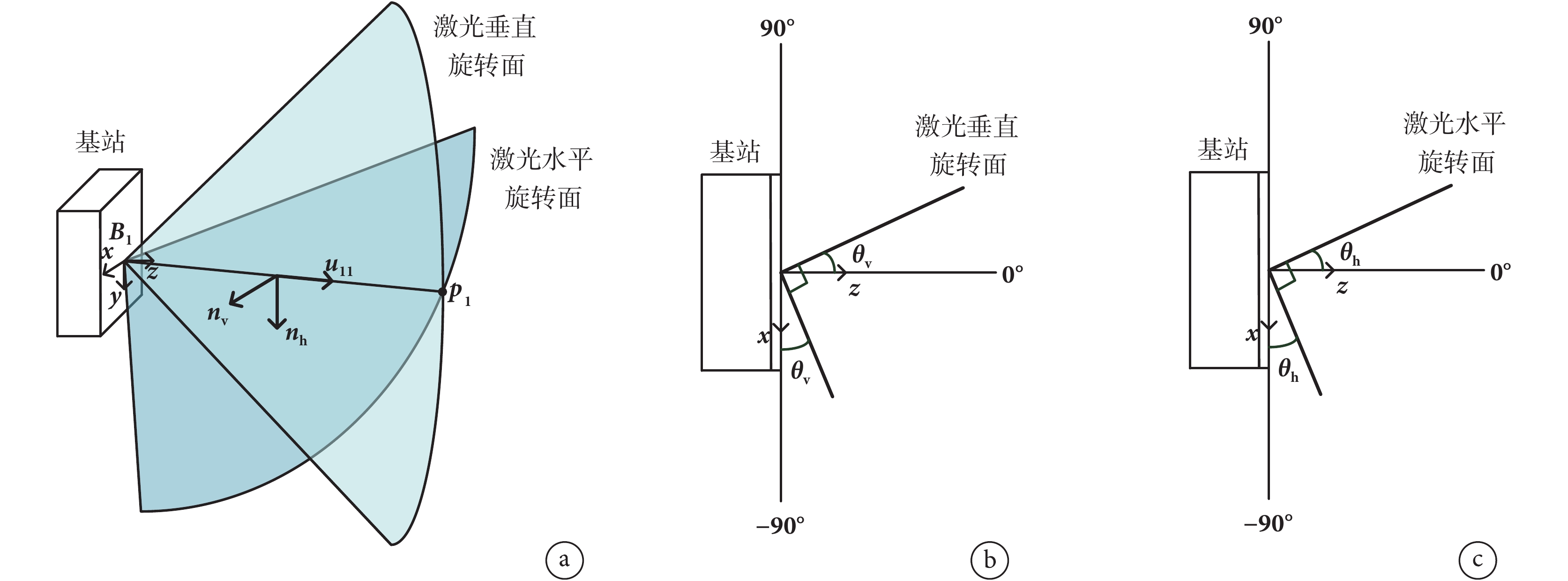
以 為例,單位向量的求解過程如下:由燈塔定位原理可知,通過燈塔基站中x軸激光和y軸激光在特定空間中掃描可得空間中任意位置的在水平方向和垂直方向的旋轉角度,根據這兩個角度可以求得基站指向該位置的單位向量,如圖4a所示。圖中以校準板
為例,單位向量的求解過程如下:由燈塔定位原理可知,通過燈塔基站中x軸激光和y軸激光在特定空間中掃描可得空間中任意位置的在水平方向和垂直方向的旋轉角度,根據這兩個角度可以求得基站指向該位置的單位向量,如圖4a所示。圖中以校準板 點為例,定義水平激光旋轉面的法向量為
點為例,定義水平激光旋轉面的法向量為 、垂直激光旋轉面的法向量為
、垂直激光旋轉面的法向量為 ,已知根據水平激光旋轉面的旋轉角度為
,已知根據水平激光旋轉面的旋轉角度為 、垂直激光旋轉面的法向量為
、垂直激光旋轉面的法向量為 ,則可得:
,則可得:
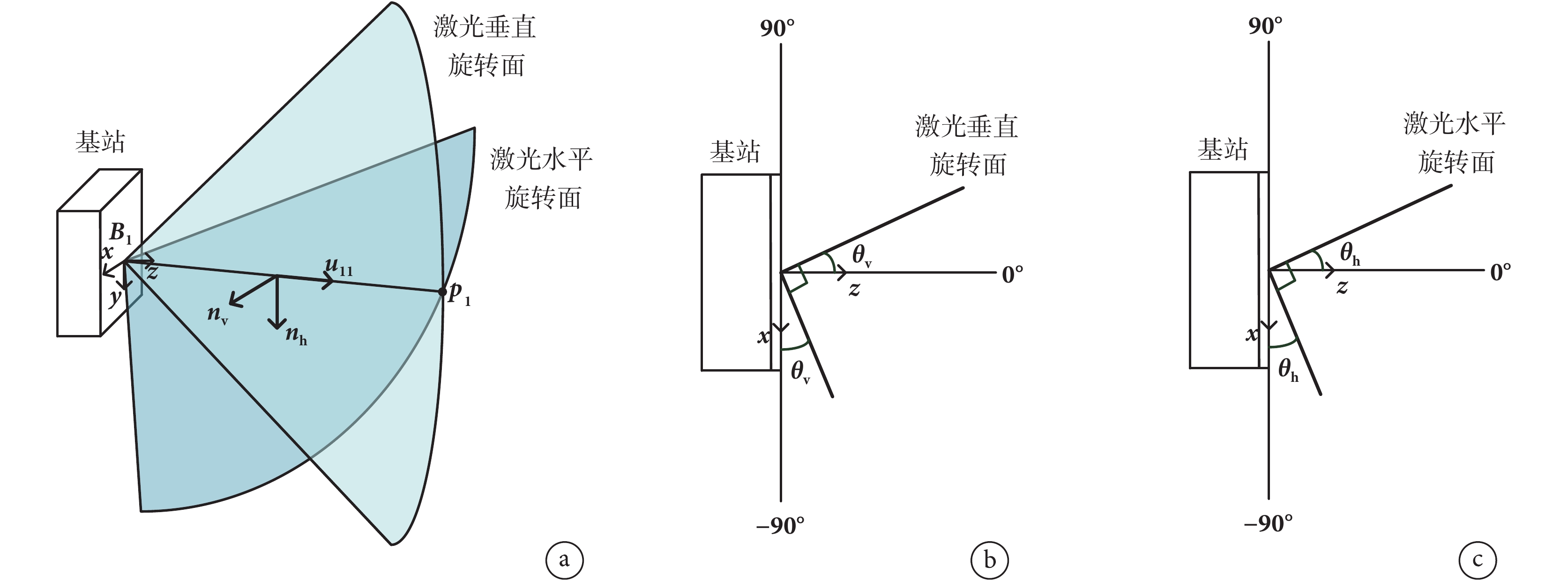 圖4
基站到特定位置單位向量示意圖
圖4
基站到特定位置單位向量示意圖
a. 三維視圖描述從基站到光電二極管的單位向量;b. 二維視圖描述垂直激光旋轉面的單位法向量;c. 二維視圖描述水平激光旋轉面的單位法向量
Figure4. Schematic diagram of unit vector from base station to specific locationa. unit vector from origin of the master lighthouse to photodiode is described in 3-D view; b. normal vector about the vertical plane is described in 2-D view; c. normal vector about the horizontal plane is described in 2-D view
 |
 |
由于向量 正好是向量
正好是向量 和
和 組成平面的單位法向量,則:
組成平面的單位法向量,則:
 |
根據上述步驟則可以依次獲得
 和
和 。又根據式(3)和(4)的步驟依次可得cosθ12、cosθ13、cosθ14、cosθ23、cosθ24和cosθ34,將這些值代入式(2),則可以求得
。又根據式(3)和(4)的步驟依次可得cosθ12、cosθ13、cosθ14、cosθ23、cosθ24和cosθ34,將這些值代入式(2),則可以求得

 和
和 。利用
。利用 和
和 ,則可得
,則可得 點的坐標為:
點的坐標為:
 |
式中
 和
和 分別為
分別為 的x軸、y軸和z軸的坐標。根據式(8)可以依次獲得
的x軸、y軸和z軸的坐標。根據式(8)可以依次獲得
 和
和 的坐標。由
的坐標。由

 和
和 的坐標和基站
的坐標和基站 掃描這四個點的旋轉角度則可以獲得基站
掃描這四個點的旋轉角度則可以獲得基站 相對于
相對于 在同一坐標系下的坐標
在同一坐標系下的坐標 。
。
由于基站 的坐標為
的坐標為 ,且已知相對于
,且已知相對于 基站
基站 的坐標
的坐標 ,如圖3b所示,則可得基站
,如圖3b所示,則可得基站 和
和 之間的距離,假設為w,則
之間的距離,假設為w,則 ,又根據式(7),可以獲得
,又根據式(7),可以獲得 與p之間以及
與p之間以及 與p之間的單位向量,分別假設為
與p之間的單位向量,分別假設為 和
和 ,則
,則 、
、 。已知
。已知 和
和 以及向量
以及向量 ,根據式(4)可以獲得向量
,根據式(4)可以獲得向量 與向量
與向量 和向量
和向量 與向量
與向量 之間的夾角,即
之間的夾角,即 和
和 ,進而就可以根據余弦定理獲得
,進而就可以根據余弦定理獲得 和
和 的值。根據式(1),就可以獲得由基站
的值。根據式(1),就可以獲得由基站 確定的
確定的 點坐標
點坐標 。同理,參照式(1),也可以獲得由基站
。同理,參照式(1),也可以獲得由基站 確定的p點坐標
確定的p點坐標 。利用
。利用 和
和 ,p點的坐標計算如下:
,p點的坐標計算如下:
 |
至此,上述就是由基站激光旋轉的角度 獲得空間中任一位置
獲得空間中任一位置 的計算過程。
的計算過程。
1.3 鴿子燈塔三維定位性能測試
鴿子燈塔三維定位性能測試主要分為離體性能測試和在體性能測試兩部分。離體和在體性能測試都是在同一空間環境中進行的,測試空間的長 × 寬 × 高為360 cm × 200 cm × 245 cm。離體性能測試主要測試定位系統位置獲取的能力和精度,主要是將追蹤器沿著直線運動,記錄追蹤器的運動軌跡,對比追蹤器運動軌跡與期望軌跡之間的誤差。具體地講,離體性能測試由追蹤器離線測試和軸向定位誤差測試組成。追蹤器離線測試通過將追蹤器沿著傾斜導引線運動,分析記錄的軌跡點是否在一條直線上,以測試燈塔定位系統的定位穩定性;軸向定位誤差測試是將追蹤器分別沿著x軸、y軸和z軸做等間距運動,對比記錄的軌跡點與期望的軌跡點之間的誤差,以測試燈塔定位系統的定位精確性。
在體性能測試是將追蹤器固定在鴿子頭部,對比分析了鴿子在地面運動、空中飛行和地面到高臺(桌子)運動三種情況下追蹤器對軌跡的定位和追蹤能力。這三種運動是鴿子最具代表性的運動行為,基本包含了鴿子所有的運動狀態。地面運動時鴿子運動速度相對較慢,反映了慢速運動狀態時燈塔定位系統的定位能力;空中飛行時鴿子運動速度一般較快,反映了快速運動狀態時燈塔定位系統的定位能力;地面到高臺運動時鴿子運動速度變化較大,是從地面運動到空間飛行時的中間過程,反映了在特殊運動狀態時燈塔定位系統的定位能力。其中在地面到高臺運動測試中,高臺的高度為80 cm。由于在體性能測試中無法準確地獲得期望的追蹤器位置數據,因此只能定性測試燈塔定位系統的定位與軌跡追蹤性能。
2 結果
從系統物理參數、離體測試結果、在體測試結果三個方面驗證了鴿子燈塔三維定位系統的工作性能,為后續在鴿子大腦空間認知與導航機制解析中的應用奠定基礎。
2.1 鴿子燈塔三維定位系統物理參數
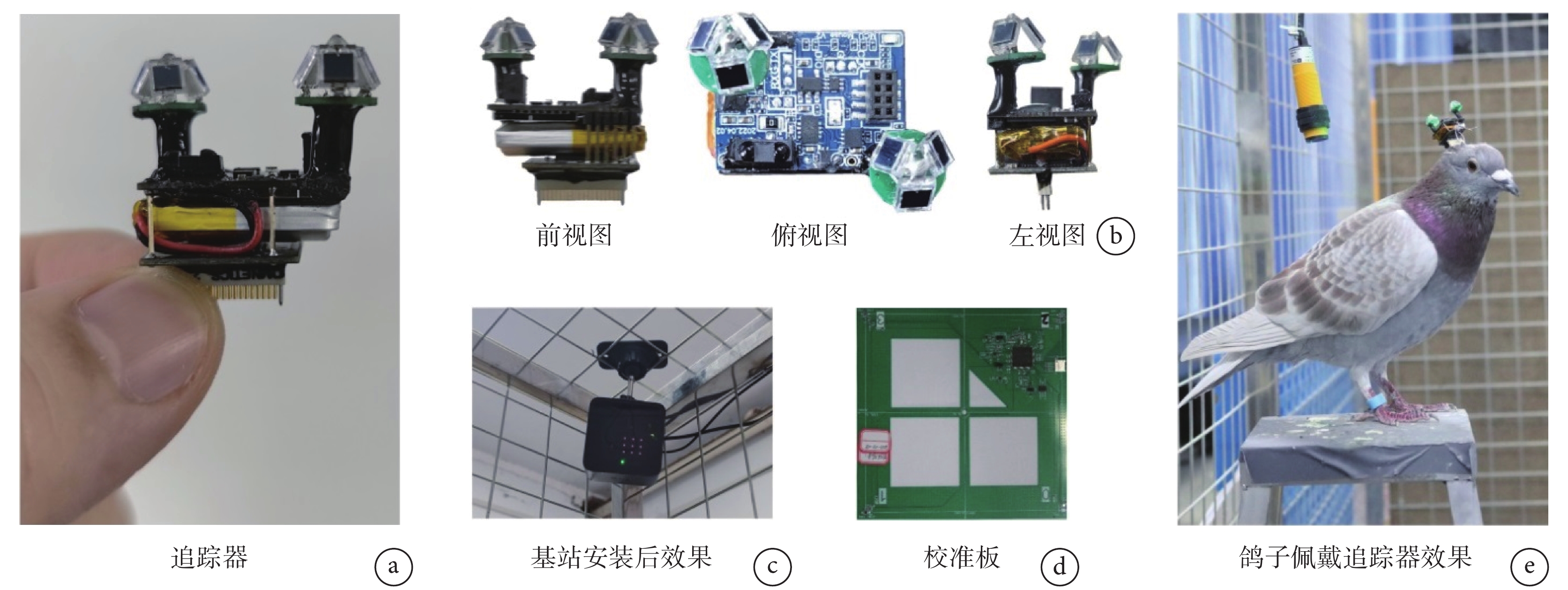
由于鴿子燈塔三維定位系統中只有追蹤器需要固定在鴿子身上,而鴿子的背負能力有限,對于背負物體的尺寸和重量要求較高,追蹤器的尺寸、重量等物理參數會直接影響其使用效果,因此本文僅測試了追蹤器的物理性能,對于激光基站的相關參數不再論述。制作完成的鴿子燈塔三維定位系統追蹤器實物如圖5a和圖5b所示,除去光敏傳感器組件后的追蹤器長 × 寬 × 高為2.1 cm × 1.6 cm × 0.8 cm,光敏傳感器組件的長 × 寬 × 高為0.7 cm × 0.7 cm × 1.4 cm,追蹤器整體重量為5.83 g,追蹤器上的兩個光敏傳感器組件是為了獲取鴿子頭部的朝向;圖5c給出了激光基站安裝后的效果;圖5d為校準板實物圖;圖5e為鴿子配帶追蹤器的效果。相對于鴿子體重和大小,追蹤器固定在鴿子頭部后基本不會影響鴿子的運動行為[12]。
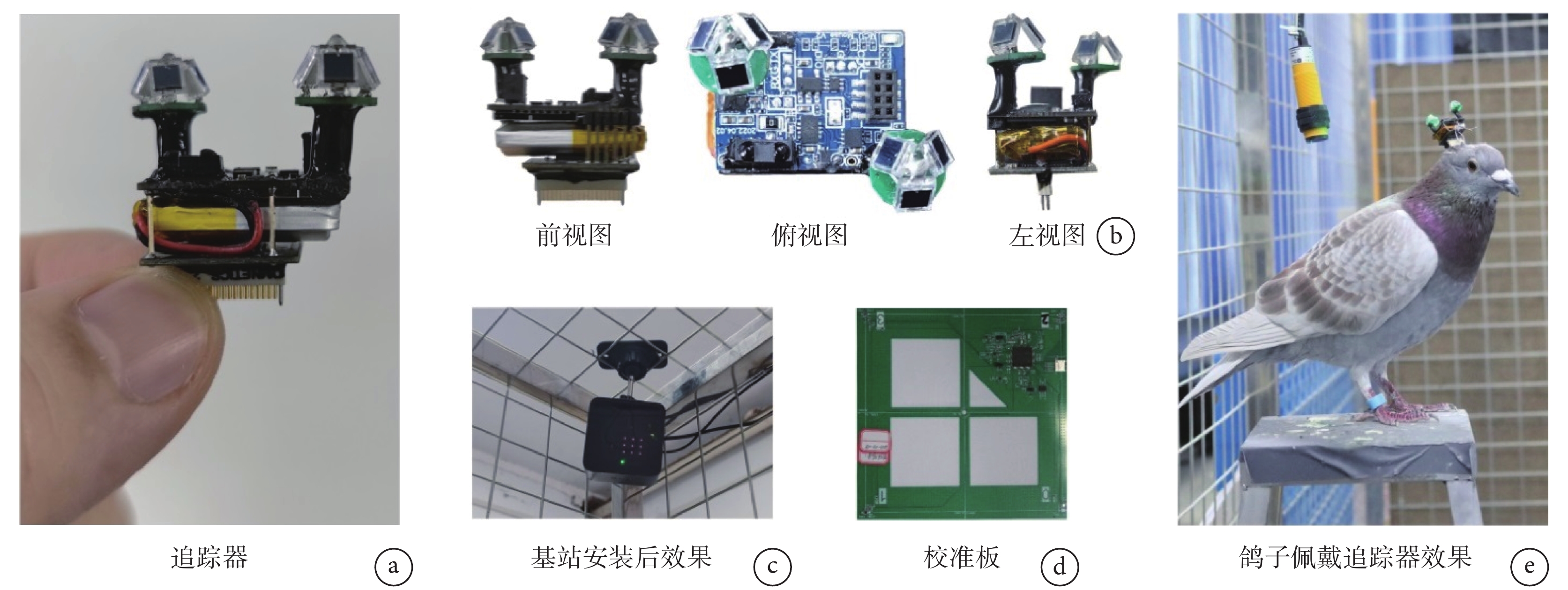 圖5
鴿子燈塔三維定位系統實物圖
圖5
鴿子燈塔三維定位系統實物圖
a. 追蹤器實物圖;b. 追蹤器三視圖;c. 激光基站安裝后的效果;d. 校準板實物圖;e. 鴿子佩戴追蹤器的效果
Figure5. Physical image of pigeon lighthouse three-dimensional positioninga. physical image of the tracker; b. three views of the tracker; c. the installing effect of a laser base station; d. physical image of calibration board; e. the effect of pigeons wearing trackers
2.2 鴿子燈塔三維定位離體測試結果
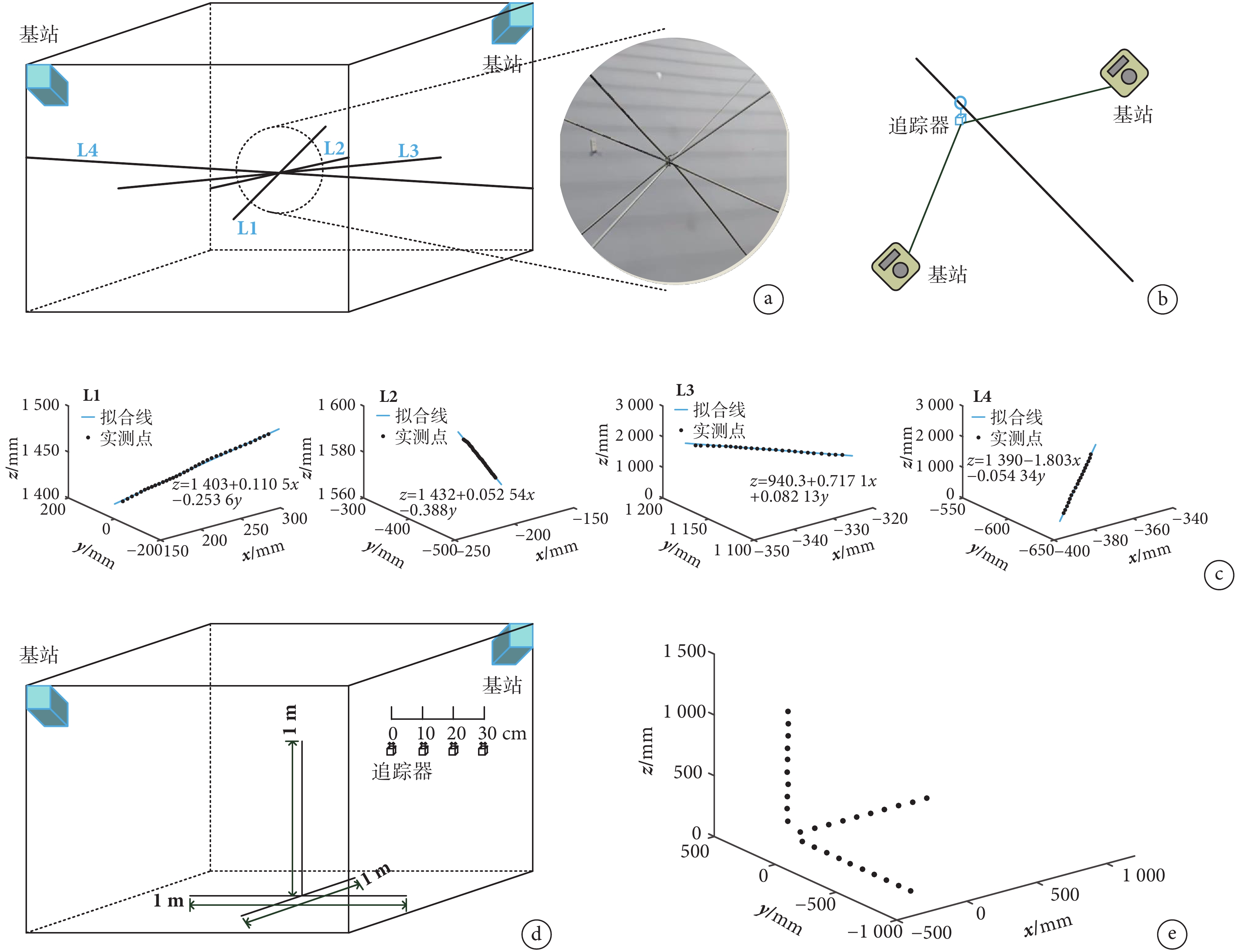
在離體實驗中,利用四個不同方向的直線作為導引線來驗證燈塔定位系統的穩定性,如圖6a所示,其中L1和L3被固定在兩個相對面之間,L2和L4被固定在兩個對角邊之間,傾斜角度約30°。追蹤器被固定在一個圓環上,測試中圓環沿著導引線做自由落體運動,如圖6b所示,并利用燈塔定位系統記錄追蹤器的位置,以生成一系列軌跡數據點,結果如圖6c所示。由于無法準確地獲得期望的軌跡點曲線,因此只能分析獲得的軌跡點是否在一條直線上。理論上,利用燈塔定位系統獲得的軌跡點需要在一條直線上。為測試軌跡點是否在一條直線上,利用MATLAB軟件中曲線擬合工具箱polynomial擬合算法(MATLAB R2016a,MathWorks Inc.,美國)對獲得的軌跡點進行了擬合。由圖可知,盡管燈塔定位系統記錄到的軌跡點與擬合直線相比有所抖動,但是測量軌跡點基本在一條直線上。在L1、L2、L3和L4四個不同方向測量軌跡點與擬合軌跡點的誤差平方和分別為19.027 7、0.398 0、19.467 8和5.488 2,誤差均方根分別為0.759 3、0.121 4、1.139 2和0.499 5。這一結果表明,在不同方向上,燈塔定位系統都具有極高的定位精度。
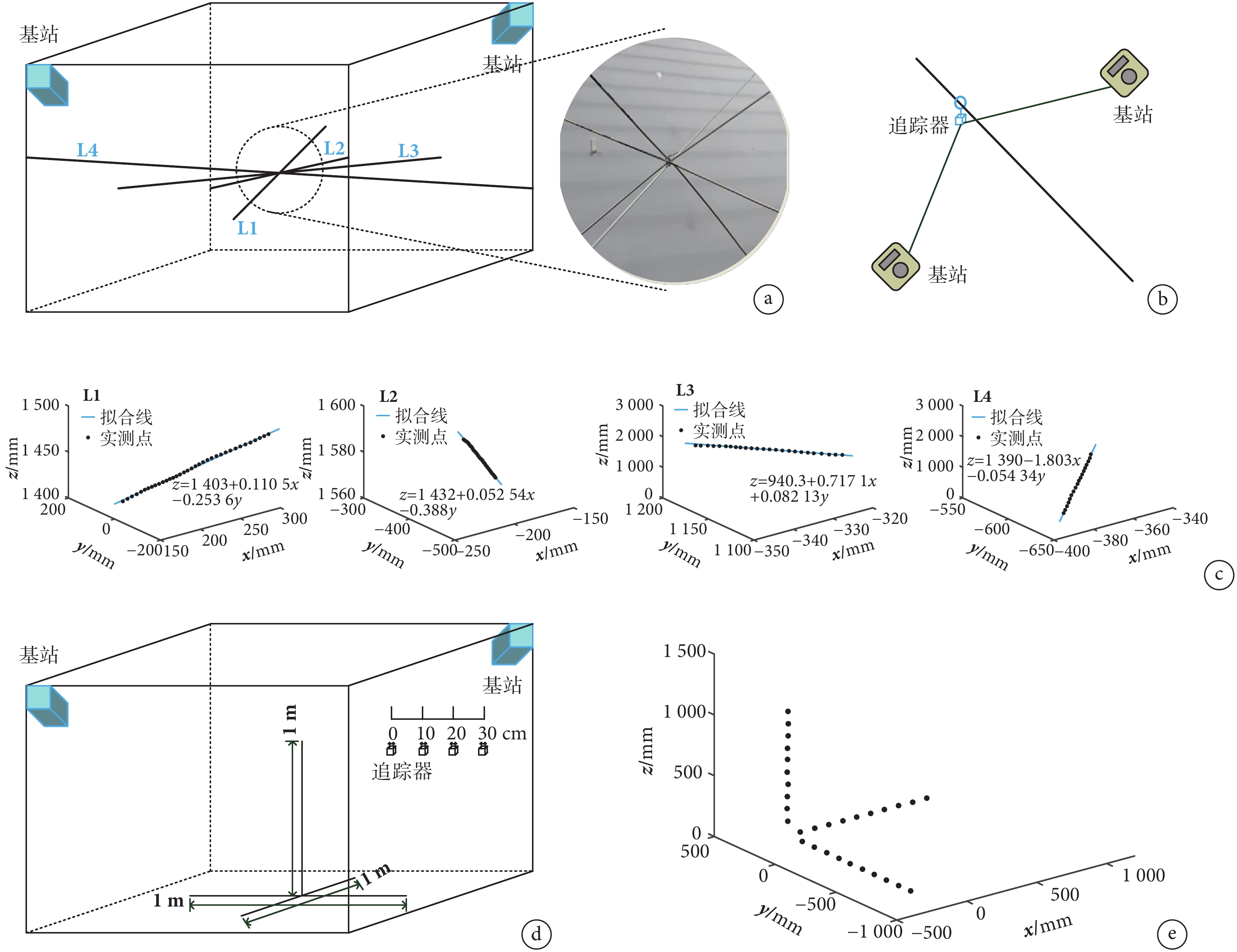 圖6
鴿子燈塔三維定位離體測試結果
圖6
鴿子燈塔三維定位離體測試結果
a. 導引線固定位置;b. 追蹤器離線測試方法示意圖;c. 四個方向追蹤器定位位置與擬合位置的對比;d. 軸向定位誤差測試示意圖;e. 軸向定位測試結果
Figure6. In vitro testing results of pigeon lighthouse three-dimensional positioninga. fixed position of lead wires; b. schematic diagram of offline testing method for tracker; c. comparison of four direction tracker positioning positions and fitting positions; d. schematic diagram of axial positioning error testing; e. axial positioning test results
為了進一步定量分析鴿子燈塔三維定位系統的定位精度,分別測量了在x軸、y軸和z軸上的定位誤差。每個軸向在長度為1 m的距離上,以直尺為參照物,以任意點為起點,追蹤器每隔10 cm定位一次,定位10次,如圖6d所示。在x軸、y軸和z軸上獲得的軌跡點如圖6e所示。由圖可知,燈塔定位系統有著較高的定位精度,在三個坐標軸上的定位誤差分別為(0.03 ± 2.46)cm、(0.99 ± 2.36)cm和(1.06 ± 4.91)cm,完全滿足鴿子大腦空間認知和導航機制解析的需要。
2.3 鴿子燈塔三維定位在體測試結果
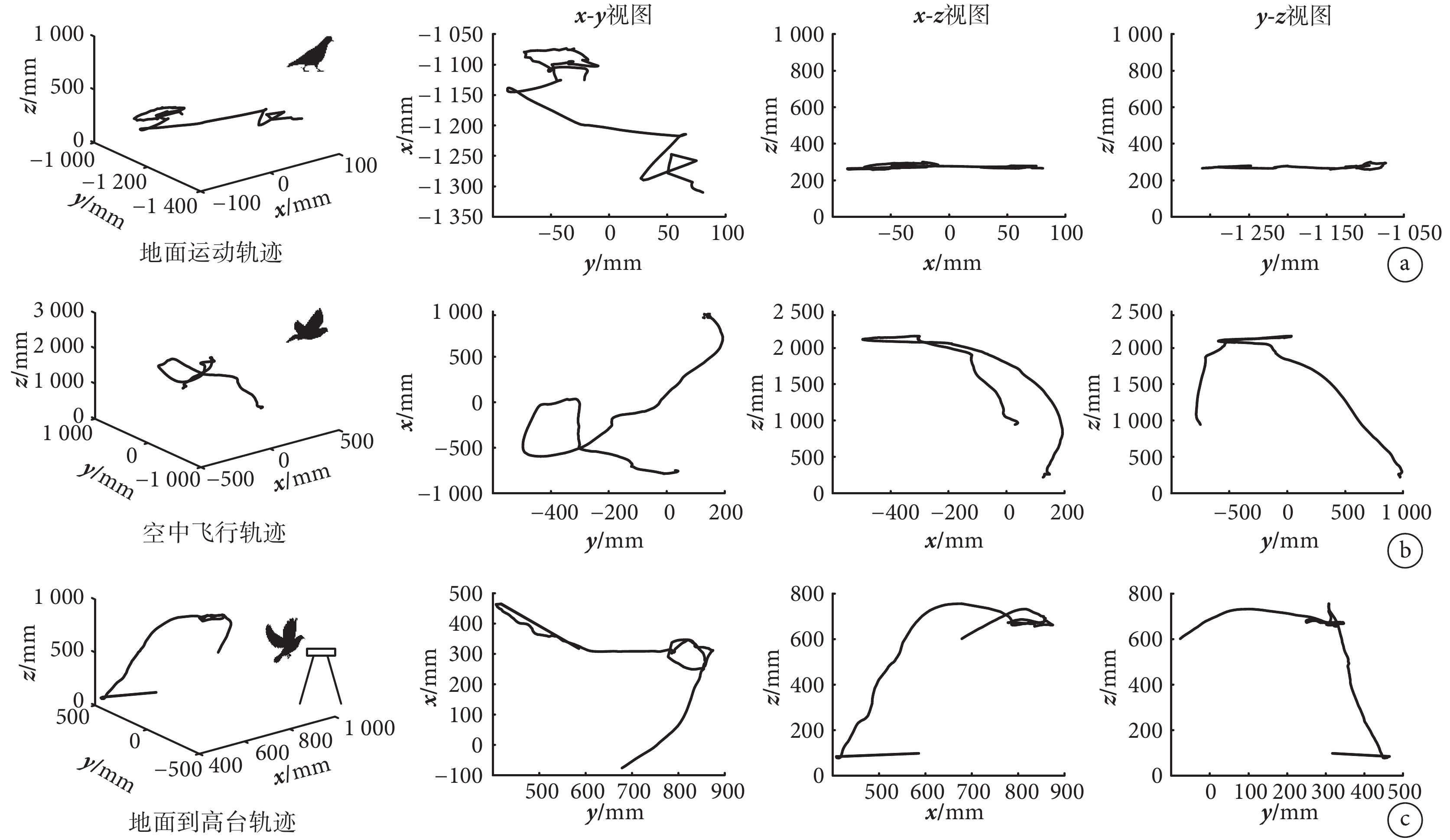
鴿子燈塔三維定位在體測試中,分別記錄了鴿子在地面運動、空中飛行及從地面到高臺的三種運動模式的軌跡,結果分別如圖7a、圖7b和圖7c所示。鴿子地面運動軌跡反映了燈塔定位系統追蹤鴿子慢速運動時的性能,由x-z視圖和y-z視圖可知鴿子軌跡在z軸變化很小,符合鴿子地面運動特性;鴿子空中飛行軌跡反映了燈塔定位系統追蹤鴿子快速運動時的性能,由圖可知x軸、y軸和z軸的軌跡變化都較大;鴿子由地面到高臺運動軌跡反映了燈塔定位系統追蹤鴿子由慢速運動向快速運動過渡時的性能,由x-z視圖和y-z視圖可知鴿子軌跡在z軸上有一個明顯的從地面到空中的變化。在體實驗測試結果表明,鴿子燈塔三維定位系統可以有效地追蹤鴿子的運動軌跡,為后續研究奠定了基礎。
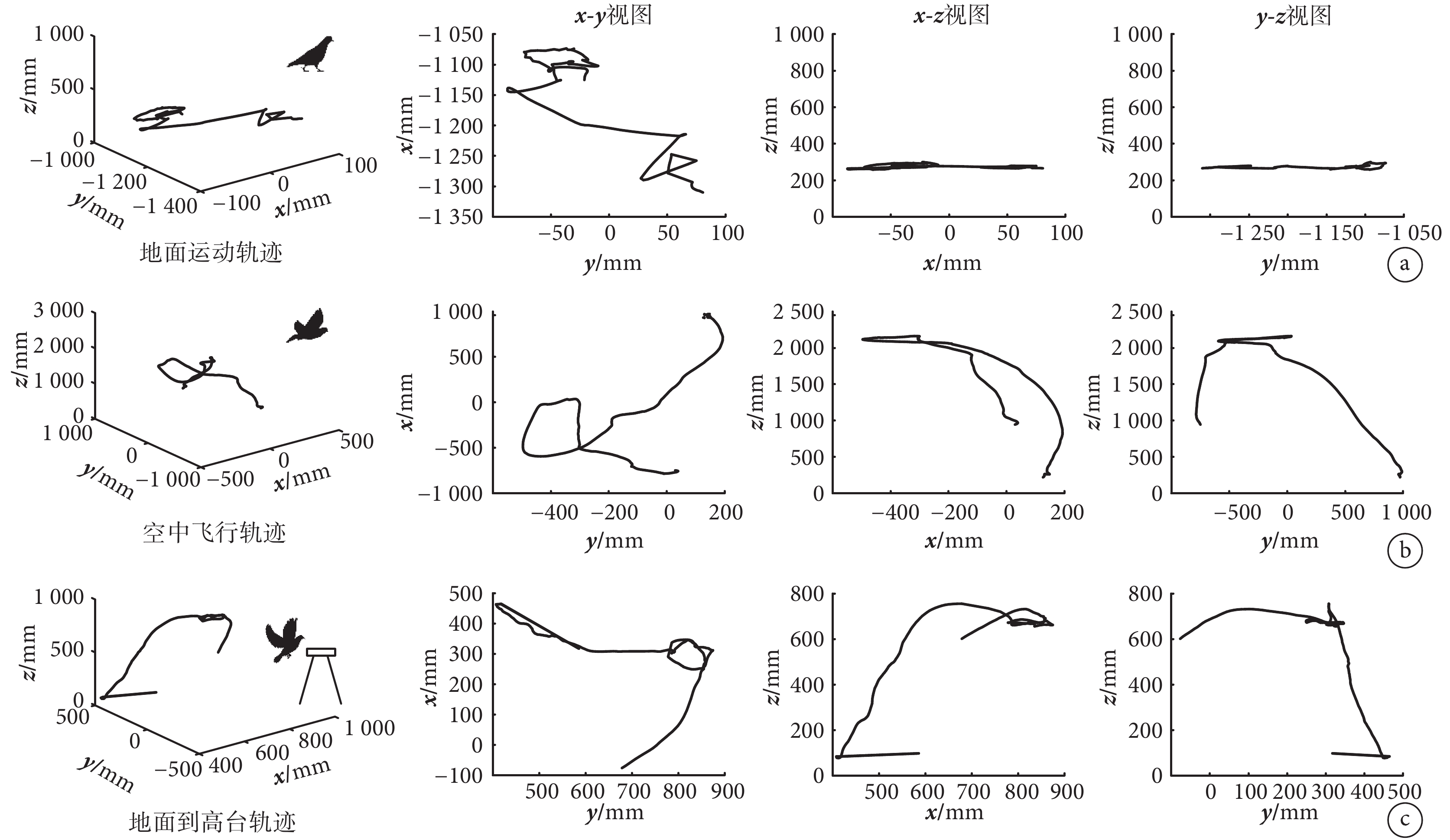 圖7
鴿子燈塔三維定位在體測試結果
圖7
鴿子燈塔三維定位在體測試結果
a. 鴿子地面運動軌跡實測結果;b. 鴿子空中飛行軌跡實測結果;c. 鴿子從地面到高臺運動軌跡實測結果
Figure7. In vivo testing results of pigeon lighthouse three-dimensional positioninga. actual measurement results of pigeon ground motion trajectory; b. actual measurement results of pigeon flight trajectory in the air; c. actual measurement results of pigeon's movement trajectory from ground to high platform
3 討論與結論
動物軌跡的定位和追蹤對于導航神經科學和行為學研究具有重要的價值。針對鴿子的軌跡追蹤,研制了鴿子燈塔三維定位系統,詳細給出了定位的原理和計算步驟,并測試了其離體和在體工作性能,實驗結果表明:① 該定位系統由激光基站和追蹤器兩部分組成,其中需要鴿子背負的追蹤器長 × 寬 × 高為2.1 cm × 1.6 cm × 2.2 cm,總重5.83 g;② 該定位系統可以在長 × 寬 × 高為360 cm × 200 cm × 245 cm空間中有效定位鴿子的運動軌跡,盡管該系統可以在更大空間中完成定位,但是測試的空間已滿足鴿子空間認知和導航機制的研究需要;③ 該定位系統可以實現三維軌跡的獲取,在x軸、y軸和z軸上定位誤差一般在厘米級,分別為(0.03 ± 2.46)cm、(0.99 ± 2.36)cm和(1.06 ± 4.91)cm,具有較高的定位精度。
鴿子是空間導航研究的經典模式動物,具有卓越的空間認知和導航能力。由于鴿子既有動物二維平面運動的特點又能在三維空間自由飛行,因此鴿子大腦空間認知和導航機制逐步引起了人們的關注[13]。但是三維空間中鳥類運動軌跡獲取還缺乏成熟的方法,傳統的光學鏡頭視頻定位方法由于受攝像頭視場角和室內空間大小的限制,更多應用于二維平面動物軌跡追蹤,對于三維空間的應用較少且具有嚴格的活動空間范圍限制,對于鴿子等體型較大的鳥類而言應用難度較大且未見相關應用報道。本文給出的鴿子燈塔三維定位系統對于具有大活動空間的動物而言是一種有效的潛在解決方案,具有高精度、高響應和低成本的特點,對于其他類型動物的二維/三維軌跡追蹤也有較大的參考價值。
燈塔定位技術最早是為了解決虛擬現實中個體位置和姿態的定位與識別問題,后來被推廣到無人機等機器人領域,尤其是在機器人室內遠距離精準追蹤中得到了廣泛應用[14-15]。但是相對機器人而言,動物具有典型的非合作性和背負能力差的缺點,限制了很多空間定位技術的使用。因為動物背負設備的體積和重量都會影響其運動能力,理論研究表明鳥類一般只能背負其體重3%的重量,如果背負超過其體重5%的重量就會影響其飛行能力[12]。而燈塔定位技術最大的優點就是對終端要求十分低,僅僅利用光敏傳感器和相關處理組件就能完成空間定位。因此本文研制的鴿子燈塔三維定位系統中固定在鴿子頭部的追蹤器重量較輕,包含神經信號采集和位置定位全部功能后的總重量小于6 g,遠遠低于鴿子體重3%的重量要求(鴿子體重多在400~500 g,背負重量按3%計算為12~15 g)。
鴿子燈塔三維定位系統具有大空間、高精度、高響應的優點,且對追蹤的空間大小沒有限制,只要基站激光能夠掃描到光敏傳感器就可以記錄到光敏傳感器所在的位置數據,這一特點使得該系統能夠適用于從二維到三維、從小空間到大空間較廣泛的應用場景。但是在實際使用中,該系統也存在視野盲區,在三維空間上下八個角落區域會存在兩個基站激光不能完全掃描到的情景,尤其是下半部分的四個角落,鴿子出現的概率較高,造成定位失敗;此外,如果固定在鴿子頭部的光敏傳感器出現遮擋等情況,基站激光不能掃描到光敏傳感器時也會使得定位失效。對于定位系統視野盲區的問題,可以利用遮擋物阻止鴿子進入存在視野盲區的位置加以解決;對于光敏傳感器出現遮擋的問題,可以使用差值的方法對定位數據進行補充。一般情況下,光敏傳感器因遮擋造成數據丟失的概率較低且時間較短,除非對軌跡數據具有極高的要求,否則不會影響實驗結果。
本文將燈塔定位技術延伸到了鴿子的三維空間定位中,有效解決了鴿子在三維大空間中運動軌跡追蹤的難題。相對于傳統的光學鏡頭視頻定位,燈塔定位中使用的是時間參數,不涉及圖像處理,對于位置的計算在設備本地就可以完成,而且可以直接將位置數據傳輸到電腦上,省略了從攝像頭到電腦的高數據傳輸的步驟,不僅降低了空間定位的成本,而且具有較高的精度和響應特性,為動物軌跡追蹤提供了新的解決方案。動物大腦中存在天然的、自適應的生物導航系統,這種生物導航系統的解析不僅對于構建機器人類腦導航模型具有重要實際價值,同時也是提升現有導航系統靈活性和魯棒性的有效途徑之一。因此后續將鴿子軌跡數據與神經信號結合,用于解析室內大范圍三維空間里鴿子大腦認知和導航機制,可為突破生物仿生導航研究瓶頸提供嶄新的解題思路。
重要聲明
利益沖突聲明:本文全體作者均聲明不存在利益沖突。
作者貢獻聲明:劉新玉負責研究計劃安排以及論文的書寫。劉凱歌、彭緩緩、秦月負責信號的采集和處理。齊小敏負責燈塔定位算法的推導。王東云負責研究計劃指導。溫盛軍負責研究計劃監督和論文修訂。感謝江蘇易格生物科技有限公司在硬件制作中的幫助。
倫理聲明:本研究通過了黃淮學院倫理委員會的審批(批文編號:20231103003)。
0 引言
大腦空間認知與導航與自然界中動物的生存和日常生活息息相關。作為腦科學研究的熱點問題,空間認知與導航機制的解析一般離不開兩個關鍵數據:一是連續獲取的動物位置數據;二是與位置數據同步采集的大腦相關腦區神經元放電信號[1]。利用這兩個數據就可以進一步解析大腦是如何表征導航空間以及如何在復雜環境中完成路徑規劃和導航的。但是目前的大腦空間認知和導航機制解析主要集中在二維平面[2-3],對于三維空間的研究還較少。三維空間相對于二維平面不僅增加了神經信號采集的難度,更重要的是在軌跡數據上增加了高度信息,極大地提高了軌跡獲取的難度。因此,獲取三維空間,尤其是室內大空間動物運動的三維軌跡數據,對于解析大腦空間認知與導航機制具有較高實用價值。
腦科學研究中對動物的定位精度要求較高,而動物背負能力有限且其合作性差,使得其運動軌跡的獲取相對于無人機或其他人造設備難度更大。傳統的定位方法包括衛星定位、基站定位、慣性導航定位等[4]大多是針對室外環境的,定位精度達不到室內動物位置定位的需求,因此基于光學鏡頭的視頻追蹤定位成為室內動物定位的首選。光學鏡頭視頻定位是通過圖像處理算法將視頻文件或實時錄制視頻中的動物與背景區分開來,以實現動物的位置獲取和軌跡追蹤[5-6]。利用單/雙光學鏡頭可以獲得動物二維/三維運動軌跡,但是由于受到光學鏡頭視場角的限制,標準攝像頭能夠追蹤到的動物活動范圍較小,而且隨著追蹤區域的擴大,追蹤的成本和需要的場地也會呈指數增加,對于鴿子等具有三維大范圍活動空間的動物軌跡追蹤而言,現有軌跡追蹤設備的能力和性價比都難以滿足實際需求。
針對室內大空間中鴿子三維軌跡的定位和追蹤,本文提出了一種基于燈塔(lighthouse)定位技術的動物軌跡獲取方法,彌補了傳統光學鏡頭視頻追蹤定位方法在室內大空間定位中的不足。燈塔定位技術的原理是利用掃描激光面對空間物體進行編碼進而對物體進行定位和追蹤[7],具有高精度、高響應、低成本的優點,由于它在虛擬現實領域中呈現出優異性能而得到了關注,之后被推廣到無人機等設備的室內定位和軌跡追蹤中[8-9]。燈塔定位技術不同于傳統的光學鏡頭視頻定位,不需要借助攝像頭,而是利用激光和光敏傳感器來確定運動物體的位置,定位精度可以達到毫米級且沒有時間延遲[10]。本研究將該技術擴展到了鴿子三維軌跡追蹤中,通過在體和離體實驗驗證了該技術的性能。
1 材料與方法
由于大腦空間認知和導航機制解析需要動物個體的位置數據和大腦的神經信號,因此本文中固定在鴿子頭部的追蹤器集成了神經信號采集和位置定位兩種功能,但是此處主要側重于追蹤器中位置定位功能的描述,其神經信號采集功能將另文介紹。
1.1 鴿子燈塔三維定位硬件結構
鴿子三維燈塔定位系統由兩個激光基站(HTC Corporation,中國臺灣)和一個追蹤器組成。兩個激光基站需要對角安裝在動物活動區域的頂部,追蹤器固定在鴿子頭部,如圖1a所示。每個激光基站內部有一個紅外發光二極管陣列(light emitting diode,LED)和兩個轉軸互相垂直的旋轉紅外激光發射器,如圖1b所示。紅外LED陣列用于產生與追蹤器同步的信號,兩個紅外激光發射器分別產生水平方向和垂直方向的扇形激發掃描面,以確定追蹤器的位置。追蹤器上有兩個光敏傳感器組,每個光敏傳感器組利用3個光敏傳感器(TEMD5110X01)組成一個菱形結構的燈塔以獲得最佳的紅外信號接收。具體地講,鴿子三維燈塔定位系統就是通過安裝在空間頂部的基站將紅外線投射到房間中,然后由固定在鴿子頭部的追蹤器捕捉這些紅外線以精確確定物體在三維空間中的位置。
圖1
鴿子燈塔三維定位原理及硬件組成
a. 燈塔定位原理示意圖;b. 燈塔定位系統硬件組成及工作示意圖
Figure1. The principle and hardware composition of lighthouse three-dimensional positioning of pigeona. schematic diagram of lighthouse positioning principle; b. hardware composition and working diagram of lighthouse positioning system
紅外激光發射器的轉速為10 ms一圈,實際運行時兩個紅外激光發射器交替工作,20 ms為一個周期[11]。循環開始時紅外LED陣列閃光作為同步信號,然后水平方向旋轉紅外激光發射器圍繞x軸掃描整個空間(簡稱x軸激光),接著垂直方向旋轉紅外激光發射器圍繞y軸掃描整個空間(簡稱y軸激光)。在激光基站的LED陣列發出同步信號后,追蹤器上的光敏傳感器可以測量出x軸激光和y軸激光分別到達傳感器的時間。追蹤器根據這個時間就可以計算出旋轉紅外激光發射器在x軸和y軸上的旋轉角度,根據旋轉角度就可以獲得基站與追蹤器之間的向量r1和r2,兩個向量的交叉點即追蹤器的位置,如圖1b所示。
1.2 鴿子燈塔三維定位軟件算法
根據鴿子燈塔三維定位系統硬件的工作過程可知,軌跡定位需要經過基站激光掃描、追蹤器信號接收、有效接收點判定、數據運算、坐標輸出等五個步驟,如圖2所示。其中數據運算是位置定位的難點,下面將詳細給出利用旋轉紅外激光發射器的旋轉角度獲得空間位置的核心步驟。
圖2
鴿子燈塔三維定位計算流程示意圖
Figure2.
Calculation process of pigeon lighthouse three-dimensional positioning
在鴿子燈塔三維定位中,目標是要獲得鴿子當前位置p的三維坐標,假設為,已知量為兩個基站在x平面和y平面的旋轉角度(由時間確定),分別假設為和。換句話說,利用和求出p點坐標是求解目標。假設基站的坐標為,如果已知點與p點之間的距離,即,如圖3a所示,則p點坐標為:
圖3
鴿子燈塔三維定位系統校準示意圖
a. 鴿子當前位置求解示意圖;b. 系統校準示意圖
Figure3. Calibration diagram of pigeon lighthouse three-dimensional positioninga. schematic diagram for solving the current position of pigeons; b. system calibration diagram
|
公式中和為基站的旋轉角度,為已知量,因此如何獲得是求解的關鍵。要獲得,需要知道基站和之間的長度以及它們之間的夾角和。獲得基站和之間的長度則需要知道和的坐標,定位和其實就是一個校準的過程,如圖3b所示。
通俗地講,鴿子燈塔三維定位系統的校準也是一個坐標轉換的過程,就是將基站坐標轉換為大地坐標。在校準過程中,需要額外的校準板進行輔助。校準板上有四個光敏傳感器作為四個待定位的空間位置,定義為、、和,四個位置之間的距離已知,定義為、、、、和。此外,假設基站的坐標為,基站的坐標為。校準時未知的量為基站與這四個位置之間的距離以及它們與基站之間的夾角,定義為、、和,、、、、、。根據余弦定理,利用上述距離和夾角可以得到以下六個等式[9]:
|
如果能獲得、、、、和,根據式(2)中六個公式就可以求得四個未知量、、和。
假設向量 、、、 且為各個向量的單位向量。以 計算為例,根據向量的點積定義,向量 和 的點積為:
|
由于式中和為單位向量,即,1,可得:
|
因此獲得和的單位向量即可求得cosθ12、cosθ13、cosθ14、cosθ23、cosθ24和cosθ34的值。
以為例,單位向量的求解過程如下:由燈塔定位原理可知,通過燈塔基站中x軸激光和y軸激光在特定空間中掃描可得空間中任意位置的在水平方向和垂直方向的旋轉角度,根據這兩個角度可以求得基站指向該位置的單位向量,如圖4a所示。圖中以校準板點為例,定義水平激光旋轉面的法向量為、垂直激光旋轉面的法向量為,已知根據水平激光旋轉面的旋轉角度為、垂直激光旋轉面的法向量為,則可得:
圖4
基站到特定位置單位向量示意圖
a. 三維視圖描述從基站到光電二極管的單位向量;b. 二維視圖描述垂直激光旋轉面的單位法向量;c. 二維視圖描述水平激光旋轉面的單位法向量
Figure4. Schematic diagram of unit vector from base station to specific locationa. unit vector from origin of the master lighthouse to photodiode is described in 3-D view; b. normal vector about the vertical plane is described in 2-D view; c. normal vector about the horizontal plane is described in 2-D view
|
|
由于向量正好是向量和組成平面的單位法向量,則:
|
根據上述步驟則可以依次獲得和。又根據式(3)和(4)的步驟依次可得cosθ12、cosθ13、cosθ14、cosθ23、cosθ24和cosθ34,將這些值代入式(2),則可以求得和。利用和,則可得點的坐標為:
|
式中和分別為的x軸、y軸和z軸的坐標。根據式(8)可以依次獲得和的坐標。由和的坐標和基站掃描這四個點的旋轉角度則可以獲得基站相對于在同一坐標系下的坐標。
由于基站的坐標為,且已知相對于基站的坐標,如圖3b所示,則可得基站和之間的距離,假設為w,則,又根據式(7),可以獲得與p之間以及與p之間的單位向量,分別假設為和,則、。已知和以及向量,根據式(4)可以獲得向量與向量和向量與向量之間的夾角,即和,進而就可以根據余弦定理獲得和的值。根據式(1),就可以獲得由基站確定的點坐標。同理,參照式(1),也可以獲得由基站確定的p點坐標。利用和,p點的坐標計算如下:
|
至此,上述就是由基站激光旋轉的角度獲得空間中任一位置的計算過程。
1.3 鴿子燈塔三維定位性能測試
鴿子燈塔三維定位性能測試主要分為離體性能測試和在體性能測試兩部分。離體和在體性能測試都是在同一空間環境中進行的,測試空間的長 × 寬 × 高為360 cm × 200 cm × 245 cm。離體性能測試主要測試定位系統位置獲取的能力和精度,主要是將追蹤器沿著直線運動,記錄追蹤器的運動軌跡,對比追蹤器運動軌跡與期望軌跡之間的誤差。具體地講,離體性能測試由追蹤器離線測試和軸向定位誤差測試組成。追蹤器離線測試通過將追蹤器沿著傾斜導引線運動,分析記錄的軌跡點是否在一條直線上,以測試燈塔定位系統的定位穩定性;軸向定位誤差測試是將追蹤器分別沿著x軸、y軸和z軸做等間距運動,對比記錄的軌跡點與期望的軌跡點之間的誤差,以測試燈塔定位系統的定位精確性。
在體性能測試是將追蹤器固定在鴿子頭部,對比分析了鴿子在地面運動、空中飛行和地面到高臺(桌子)運動三種情況下追蹤器對軌跡的定位和追蹤能力。這三種運動是鴿子最具代表性的運動行為,基本包含了鴿子所有的運動狀態。地面運動時鴿子運動速度相對較慢,反映了慢速運動狀態時燈塔定位系統的定位能力;空中飛行時鴿子運動速度一般較快,反映了快速運動狀態時燈塔定位系統的定位能力;地面到高臺運動時鴿子運動速度變化較大,是從地面運動到空間飛行時的中間過程,反映了在特殊運動狀態時燈塔定位系統的定位能力。其中在地面到高臺運動測試中,高臺的高度為80 cm。由于在體性能測試中無法準確地獲得期望的追蹤器位置數據,因此只能定性測試燈塔定位系統的定位與軌跡追蹤性能。
2 結果
從系統物理參數、離體測試結果、在體測試結果三個方面驗證了鴿子燈塔三維定位系統的工作性能,為后續在鴿子大腦空間認知與導航機制解析中的應用奠定基礎。
2.1 鴿子燈塔三維定位系統物理參數
由于鴿子燈塔三維定位系統中只有追蹤器需要固定在鴿子身上,而鴿子的背負能力有限,對于背負物體的尺寸和重量要求較高,追蹤器的尺寸、重量等物理參數會直接影響其使用效果,因此本文僅測試了追蹤器的物理性能,對于激光基站的相關參數不再論述。制作完成的鴿子燈塔三維定位系統追蹤器實物如圖5a和圖5b所示,除去光敏傳感器組件后的追蹤器長 × 寬 × 高為2.1 cm × 1.6 cm × 0.8 cm,光敏傳感器組件的長 × 寬 × 高為0.7 cm × 0.7 cm × 1.4 cm,追蹤器整體重量為5.83 g,追蹤器上的兩個光敏傳感器組件是為了獲取鴿子頭部的朝向;圖5c給出了激光基站安裝后的效果;圖5d為校準板實物圖;圖5e為鴿子配帶追蹤器的效果。相對于鴿子體重和大小,追蹤器固定在鴿子頭部后基本不會影響鴿子的運動行為[12]。
圖5
鴿子燈塔三維定位系統實物圖
a. 追蹤器實物圖;b. 追蹤器三視圖;c. 激光基站安裝后的效果;d. 校準板實物圖;e. 鴿子佩戴追蹤器的效果
Figure5. Physical image of pigeon lighthouse three-dimensional positioninga. physical image of the tracker; b. three views of the tracker; c. the installing effect of a laser base station; d. physical image of calibration board; e. the effect of pigeons wearing trackers
2.2 鴿子燈塔三維定位離體測試結果
在離體實驗中,利用四個不同方向的直線作為導引線來驗證燈塔定位系統的穩定性,如圖6a所示,其中L1和L3被固定在兩個相對面之間,L2和L4被固定在兩個對角邊之間,傾斜角度約30°。追蹤器被固定在一個圓環上,測試中圓環沿著導引線做自由落體運動,如圖6b所示,并利用燈塔定位系統記錄追蹤器的位置,以生成一系列軌跡數據點,結果如圖6c所示。由于無法準確地獲得期望的軌跡點曲線,因此只能分析獲得的軌跡點是否在一條直線上。理論上,利用燈塔定位系統獲得的軌跡點需要在一條直線上。為測試軌跡點是否在一條直線上,利用MATLAB軟件中曲線擬合工具箱polynomial擬合算法(MATLAB R2016a,MathWorks Inc.,美國)對獲得的軌跡點進行了擬合。由圖可知,盡管燈塔定位系統記錄到的軌跡點與擬合直線相比有所抖動,但是測量軌跡點基本在一條直線上。在L1、L2、L3和L4四個不同方向測量軌跡點與擬合軌跡點的誤差平方和分別為19.027 7、0.398 0、19.467 8和5.488 2,誤差均方根分別為0.759 3、0.121 4、1.139 2和0.499 5。這一結果表明,在不同方向上,燈塔定位系統都具有極高的定位精度。
圖6
鴿子燈塔三維定位離體測試結果
a. 導引線固定位置;b. 追蹤器離線測試方法示意圖;c. 四個方向追蹤器定位位置與擬合位置的對比;d. 軸向定位誤差測試示意圖;e. 軸向定位測試結果
Figure6. In vitro testing results of pigeon lighthouse three-dimensional positioninga. fixed position of lead wires; b. schematic diagram of offline testing method for tracker; c. comparison of four direction tracker positioning positions and fitting positions; d. schematic diagram of axial positioning error testing; e. axial positioning test results
為了進一步定量分析鴿子燈塔三維定位系統的定位精度,分別測量了在x軸、y軸和z軸上的定位誤差。每個軸向在長度為1 m的距離上,以直尺為參照物,以任意點為起點,追蹤器每隔10 cm定位一次,定位10次,如圖6d所示。在x軸、y軸和z軸上獲得的軌跡點如圖6e所示。由圖可知,燈塔定位系統有著較高的定位精度,在三個坐標軸上的定位誤差分別為(0.03 ± 2.46)cm、(0.99 ± 2.36)cm和(1.06 ± 4.91)cm,完全滿足鴿子大腦空間認知和導航機制解析的需要。
2.3 鴿子燈塔三維定位在體測試結果
鴿子燈塔三維定位在體測試中,分別記錄了鴿子在地面運動、空中飛行及從地面到高臺的三種運動模式的軌跡,結果分別如圖7a、圖7b和圖7c所示。鴿子地面運動軌跡反映了燈塔定位系統追蹤鴿子慢速運動時的性能,由x-z視圖和y-z視圖可知鴿子軌跡在z軸變化很小,符合鴿子地面運動特性;鴿子空中飛行軌跡反映了燈塔定位系統追蹤鴿子快速運動時的性能,由圖可知x軸、y軸和z軸的軌跡變化都較大;鴿子由地面到高臺運動軌跡反映了燈塔定位系統追蹤鴿子由慢速運動向快速運動過渡時的性能,由x-z視圖和y-z視圖可知鴿子軌跡在z軸上有一個明顯的從地面到空中的變化。在體實驗測試結果表明,鴿子燈塔三維定位系統可以有效地追蹤鴿子的運動軌跡,為后續研究奠定了基礎。
圖7
鴿子燈塔三維定位在體測試結果
a. 鴿子地面運動軌跡實測結果;b. 鴿子空中飛行軌跡實測結果;c. 鴿子從地面到高臺運動軌跡實測結果
Figure7. In vivo testing results of pigeon lighthouse three-dimensional positioninga. actual measurement results of pigeon ground motion trajectory; b. actual measurement results of pigeon flight trajectory in the air; c. actual measurement results of pigeon's movement trajectory from ground to high platform
3 討論與結論
動物軌跡的定位和追蹤對于導航神經科學和行為學研究具有重要的價值。針對鴿子的軌跡追蹤,研制了鴿子燈塔三維定位系統,詳細給出了定位的原理和計算步驟,并測試了其離體和在體工作性能,實驗結果表明:① 該定位系統由激光基站和追蹤器兩部分組成,其中需要鴿子背負的追蹤器長 × 寬 × 高為2.1 cm × 1.6 cm × 2.2 cm,總重5.83 g;② 該定位系統可以在長 × 寬 × 高為360 cm × 200 cm × 245 cm空間中有效定位鴿子的運動軌跡,盡管該系統可以在更大空間中完成定位,但是測試的空間已滿足鴿子空間認知和導航機制的研究需要;③ 該定位系統可以實現三維軌跡的獲取,在x軸、y軸和z軸上定位誤差一般在厘米級,分別為(0.03 ± 2.46)cm、(0.99 ± 2.36)cm和(1.06 ± 4.91)cm,具有較高的定位精度。
鴿子是空間導航研究的經典模式動物,具有卓越的空間認知和導航能力。由于鴿子既有動物二維平面運動的特點又能在三維空間自由飛行,因此鴿子大腦空間認知和導航機制逐步引起了人們的關注[13]。但是三維空間中鳥類運動軌跡獲取還缺乏成熟的方法,傳統的光學鏡頭視頻定位方法由于受攝像頭視場角和室內空間大小的限制,更多應用于二維平面動物軌跡追蹤,對于三維空間的應用較少且具有嚴格的活動空間范圍限制,對于鴿子等體型較大的鳥類而言應用難度較大且未見相關應用報道。本文給出的鴿子燈塔三維定位系統對于具有大活動空間的動物而言是一種有效的潛在解決方案,具有高精度、高響應和低成本的特點,對于其他類型動物的二維/三維軌跡追蹤也有較大的參考價值。
燈塔定位技術最早是為了解決虛擬現實中個體位置和姿態的定位與識別問題,后來被推廣到無人機等機器人領域,尤其是在機器人室內遠距離精準追蹤中得到了廣泛應用[14-15]。但是相對機器人而言,動物具有典型的非合作性和背負能力差的缺點,限制了很多空間定位技術的使用。因為動物背負設備的體積和重量都會影響其運動能力,理論研究表明鳥類一般只能背負其體重3%的重量,如果背負超過其體重5%的重量就會影響其飛行能力[12]。而燈塔定位技術最大的優點就是對終端要求十分低,僅僅利用光敏傳感器和相關處理組件就能完成空間定位。因此本文研制的鴿子燈塔三維定位系統中固定在鴿子頭部的追蹤器重量較輕,包含神經信號采集和位置定位全部功能后的總重量小于6 g,遠遠低于鴿子體重3%的重量要求(鴿子體重多在400~500 g,背負重量按3%計算為12~15 g)。
鴿子燈塔三維定位系統具有大空間、高精度、高響應的優點,且對追蹤的空間大小沒有限制,只要基站激光能夠掃描到光敏傳感器就可以記錄到光敏傳感器所在的位置數據,這一特點使得該系統能夠適用于從二維到三維、從小空間到大空間較廣泛的應用場景。但是在實際使用中,該系統也存在視野盲區,在三維空間上下八個角落區域會存在兩個基站激光不能完全掃描到的情景,尤其是下半部分的四個角落,鴿子出現的概率較高,造成定位失敗;此外,如果固定在鴿子頭部的光敏傳感器出現遮擋等情況,基站激光不能掃描到光敏傳感器時也會使得定位失效。對于定位系統視野盲區的問題,可以利用遮擋物阻止鴿子進入存在視野盲區的位置加以解決;對于光敏傳感器出現遮擋的問題,可以使用差值的方法對定位數據進行補充。一般情況下,光敏傳感器因遮擋造成數據丟失的概率較低且時間較短,除非對軌跡數據具有極高的要求,否則不會影響實驗結果。
本文將燈塔定位技術延伸到了鴿子的三維空間定位中,有效解決了鴿子在三維大空間中運動軌跡追蹤的難題。相對于傳統的光學鏡頭視頻定位,燈塔定位中使用的是時間參數,不涉及圖像處理,對于位置的計算在設備本地就可以完成,而且可以直接將位置數據傳輸到電腦上,省略了從攝像頭到電腦的高數據傳輸的步驟,不僅降低了空間定位的成本,而且具有較高的精度和響應特性,為動物軌跡追蹤提供了新的解決方案。動物大腦中存在天然的、自適應的生物導航系統,這種生物導航系統的解析不僅對于構建機器人類腦導航模型具有重要實際價值,同時也是提升現有導航系統靈活性和魯棒性的有效途徑之一。因此后續將鴿子軌跡數據與神經信號結合,用于解析室內大范圍三維空間里鴿子大腦認知和導航機制,可為突破生物仿生導航研究瓶頸提供嶄新的解題思路。
重要聲明
利益沖突聲明:本文全體作者均聲明不存在利益沖突。
作者貢獻聲明:劉新玉負責研究計劃安排以及論文的書寫。劉凱歌、彭緩緩、秦月負責信號的采集和處理。齊小敏負責燈塔定位算法的推導。王東云負責研究計劃指導。溫盛軍負責研究計劃監督和論文修訂。感謝江蘇易格生物科技有限公司在硬件制作中的幫助。
倫理聲明:本研究通過了黃淮學院倫理委員會的審批(批文編號:20231103003)。