引用本文: 王碧菠, 陳博, 李星辰, 徐陽, 彭志杰, 徐向陽. 3D 打印距骨部件修復重建距骨病損的生物力學研究. 中國修復重建外科雜志, 2018, 32(3): 306-310. doi: 10.7507/1002-1892.201705068 復制
版權信息: ?四川大學華西醫院華西期刊社《中國修復重建外科雜志》版權所有,未經授權不得轉載、改編
距骨病損臨床常見,可導致踝關節疼痛腫脹和功能障礙,如未及時治療遠期可能發生踝關節和距下關節炎,嚴重影響患者行走功能和生活質量[1-4]。大范圍距骨病損清理后的修復重建是臨床難點,無論選擇自體或同種異體骨軟骨移植,均存在形態不匹配、來源有限等問題,臨床療效不佳[5-10]。近年興起的 3D 打印技術為解決距骨修復重建問題提供了一個理想方式。3D 打印的距骨部件,其大小形態及關節面弧度能與切除的距骨部分達到完全一致,植入后與受體距骨形態高度匹配。本研究擬通過生物力學試驗,探討 3D 打印距骨部件修復重建距骨病損后距骨關節面應力變化,為臨床應用奠定基礎。
1 材料與方法
1.1 實驗標本及主要儀器
6 具新鮮冰凍踝關節尸體標本,由上海交通大學醫學院解剖學系提供。其中,男 3 具,女 3 具;供體年齡(57.4±21.5)歲。膝下 1/3 截肢,儲存于 –20℃ 冰箱,使用前 24 h 取出室溫下解凍。標本無踝足部疾病、外傷或手術史,外形檢查及 CT 掃描證實踝關節形態、活動度和穩定性良好。
自制夾具足踝萬向加載裝置(專利號:ZL 201320664766.0)。壓敏紙(FUJIFILM 公司,日本);Instron5569 電子萬能材料試驗機(Instron 公司,美國);V39 高分辨率彩色掃描儀(EPSON 公司,日本);Matlab R2015a 軟件(MathWorks 公司,美國);醫學圖像處理軟件 3Drecon(上海交通大學);3-matic 軟件、magics 軟件(Materialise 公司,比利時);3D 打印機(上海光韻達三維科技有限公司)。
1.2 3D 打印距骨部件及截骨導板
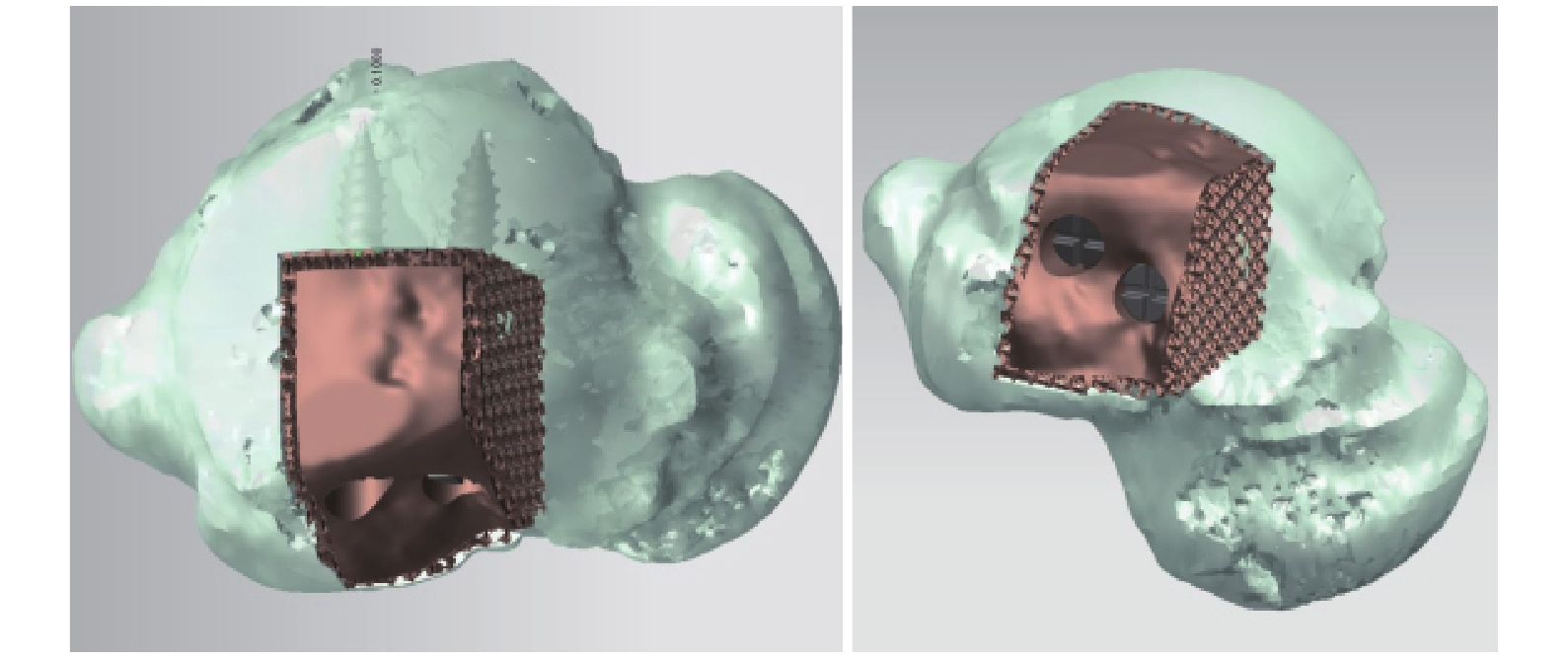
取 6 具踝關節標本行 CT 掃描,掃描范圍為脛腓骨中下 1/3 至足趾,層厚 0.625 mm。將獲得的原始數據以.dcm 格式導入醫學圖像處理軟件 3Drecon,進行距骨單個骨分割及三維重建,制備距骨三維重建模型。將該模型數據以.stl 格式導入 3-matic 軟件,建立大小為 1.8 cm×1.8 cm×1.5 cm 的長方體包裹病灶,然后用建立的長方體布爾剪掉距骨,根據此位置及形態設計距骨部件及截骨導板模型。在距骨部件上設計 2 個螺釘孔,該螺釘孔可植入直徑 3.2 mm 埋頭螺釘,且螺釘植入后分別與距骨關節面平行及成 30°角 (圖 1)。將距骨部件模型數據以.stl 格式導入 magics 軟件,進行 3D 打印前數據處理切層。將切層數據導入 3D 打印機,使用鈦合金材料進行 3D 打印,對打印假體進行去支撐、熱處理、拋光等后處理。同法采用尼龍和光敏樹脂打印截骨導板以及距骨模型(圖 2)。
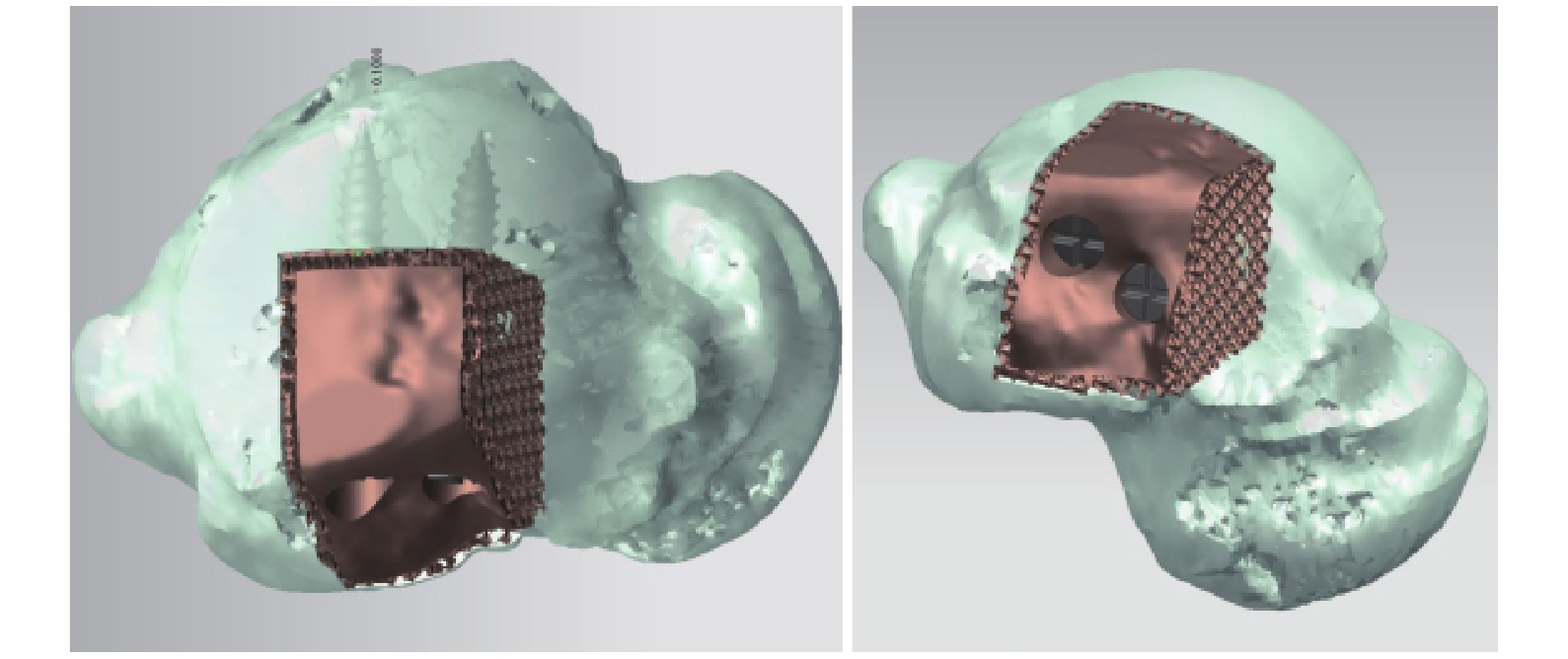 圖1
軟件設計距骨部件嵌入受體距骨并以螺釘固定
Figure1.
3D printed talar component was designed by software and fixed with screws
圖1
軟件設計距骨部件嵌入受體距骨并以螺釘固定
Figure1.
3D printed talar component was designed by software and fixed with screws
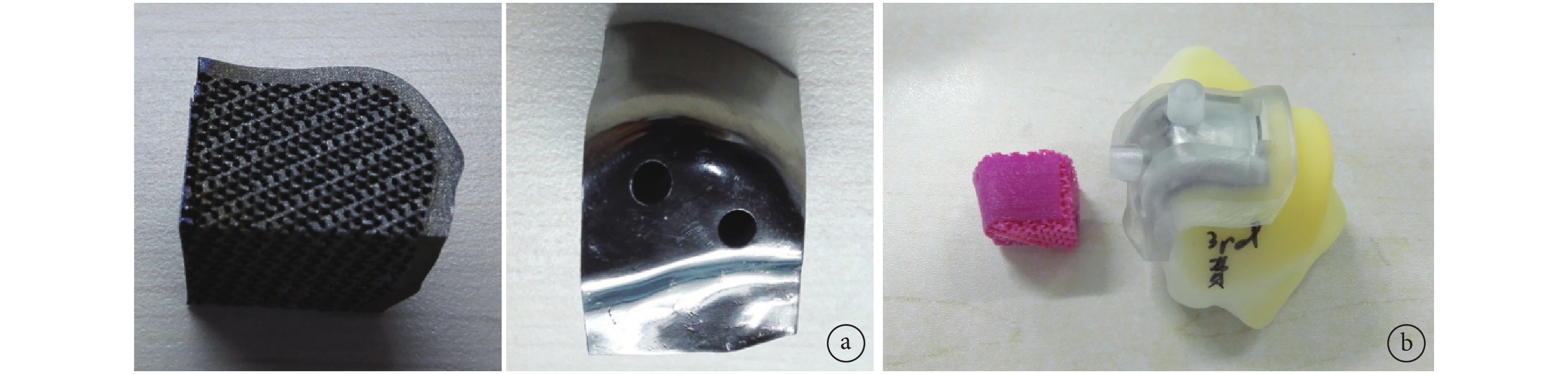
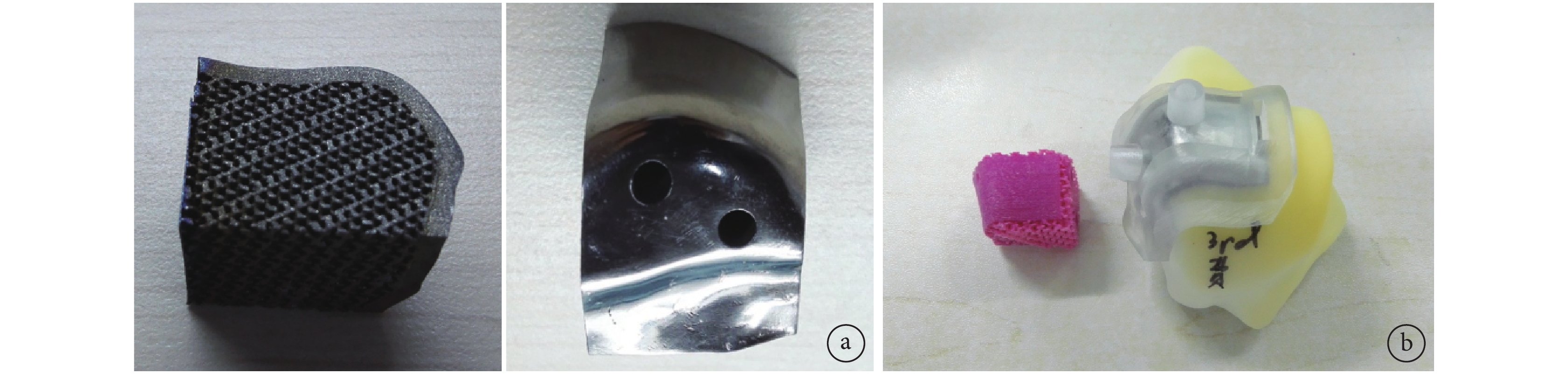 圖2
3D 打印實體
圖2
3D 打印實體
a. 3D 打印距骨部件;b. 距骨部件及截骨導板嵌入受體距骨
Figure2. 3D printed talar component entitya. 3D printed talar component entity; b. Assembled 3D printed talar component entity and osteotomy guide plate
1.3 3D 打印距骨部件植入方法
取踝關節標本按照臨床常用方法進行內踝截骨顯露距骨病灶。在內踝前方 1 cm 處縱行切開,顯露脛骨遠端,從內踝斜行植入 2 枚空心釘導針、平行關節面植入 1 枚空心釘導針定位,透視下明確導針位置滿意,空心鉆鉆孔定位以便截骨后精確復位固定。退出導針后分離周圍軟組織,充分顯露脛骨遠端內側骨質,使用擺鋸及骨鑿行脛骨遠端內側斜行截骨,將骨塊連同周圍的韌帶關節囊向內側分開,顯露距骨內側穹窿。將制備的 3D 打印截骨導板固定于距骨設定截骨部位,使用擺鋸及骨鑿在截骨導板引導下截除距骨內側(包含病灶)部分;植入 3D 打印距骨部件,從設計的螺釘孔植入 2 枚 Wright 3.2 mm 埋頭螺釘固定,釘頭擰入假體使之低于假體表面。將內踝截骨塊復位,點狀復位鉗臨時固定,確認無上移或旋轉后,在空心鉆鉆孔定位預留的 3 個釘孔內各植入 1 枚空心釘導針,透視下確認位置正確后,測量并選擇合適長度空心螺釘植入,以固定內踝截骨塊。見圖 3。
 圖3
3D 打印距骨部件植入步驟
圖3
3D 打印距骨部件植入步驟
a. 于標本脛骨遠端內側斜行截骨;b、c. 3D 打印截骨導板引導下截除距骨內側包含病灶部分;d、e. 植入 3D 打印距骨部件;f. 將內踝截骨塊復位并螺釘固定
Figure3. Procedure of 3D printed talar component implantationa. Oblique osteotomy at distal medial tibia; b, c. Removal of the talar lesion at the guidance of 3D printed osteotomy guide plate; d, e. 3D printed talar component was implanted and fixed with screws; f. The medial malleolus was reduced and fixed with screws
1.4 生物力學測試
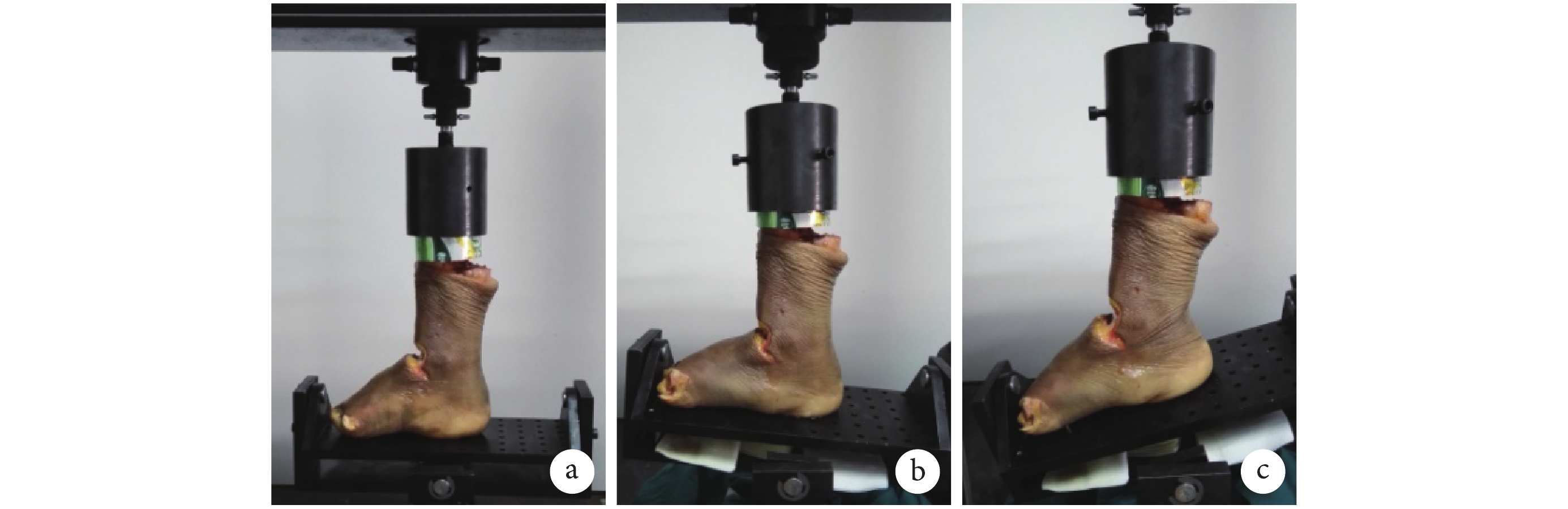
3D 打印距骨部件植入前后測試踝關節內應力。去除 6 具踝關節標本近端脛骨周圍皮膚肌肉等軟組織顯露骨干,以牙托粉固定后,用螺釘固定標本于自制夾具足踝萬向加載裝置,連接于 Instron5569 電子萬能材料試驗機。在踝關節正前方橫行切開,將裁剪為 3 cm×3 cm 大小的壓敏紙插入踝關節腔中,完全覆蓋距骨穹窿。模擬步態站立期踝關節受力大小,分別于踝關節中立位、背伸 10°位及跖屈 14°位時施加 1 500 N 軸向壓力,代表正常人群 1.5~3.0 倍身體質量[11-13]。經 2 min 均勻持續加壓達壓力峰值,并維持 2 min(圖 4)。然后取出壓敏紙,采用掃描儀以 1 200 dpi 精度進行彩色反射掃描,掃描范圍大于壓敏紙面積,圖片大小統一為 2 000×2 000 像素,以 50×50 像素為 1 個單元格進行處理,處理后的結果為 40×40 個單元格,每個單元格的面積約為 0.011 cm2。 根據顯色區域深淺程度及形態確定距骨受力范圍及距骨假體部件位置,參考比色卡,運用 Matlab 軟件測算距骨受力面積及各區域壓強。
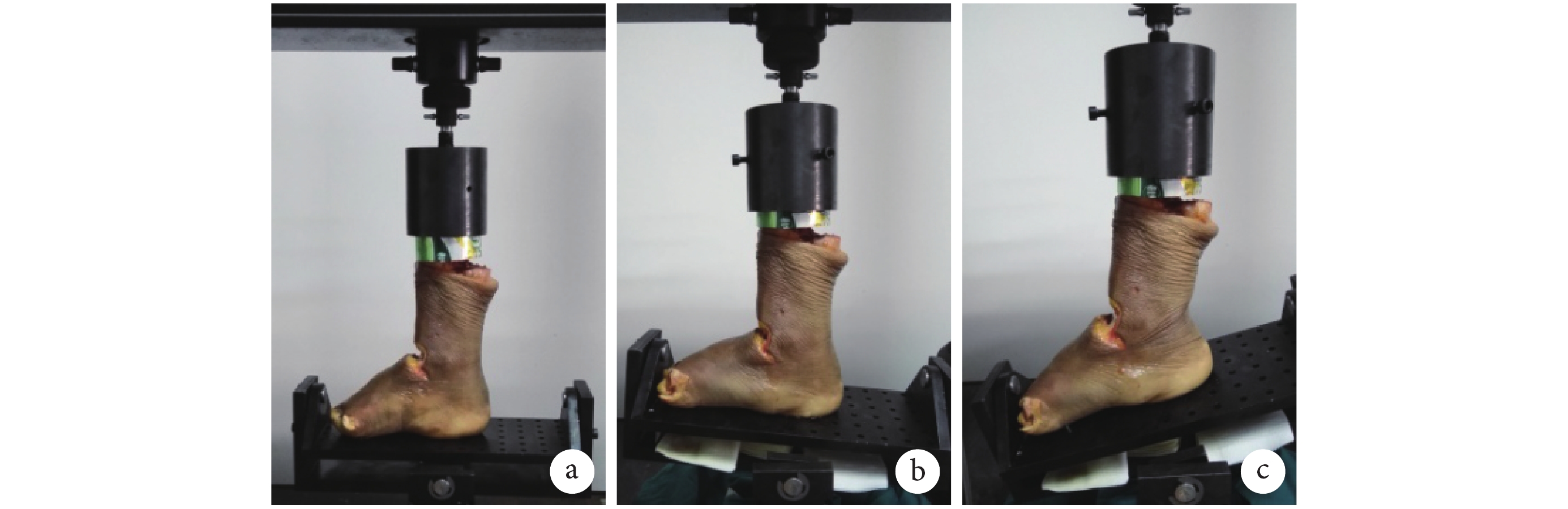 圖4
生物力學測試
圖4
生物力學測試
a. 中立位;b. 背伸 10°位;c. 跖屈 14°位
Figure4. Biomechanical test on ankle specimena. Neutral position; b. The 10° of dorsiflexion; c. The 14° of plantar flexion
1.5 統計學方法
采用 SPSS 22.0 統計軟件進行分析。數據以均數±標準差表示,手術前后不同屈伸角度間比較采用方差分析,兩兩比較采用 SNK 檢驗;同一屈伸角度手術前后比較采用配對 t 檢驗;檢驗水準 α=0.05。
2 結果
踝關節位于中立位、背伸 10°位、跖屈 14 °位時,距骨部件植入前距骨受力面積分別為(3.07±0.35)、(3.53±0.43)、(2.53±0.39)cm2,植入后分別為(3.11±0.36)、(3.62±0.44)、(2.55±0.44)cm2。距骨部件植入前,踝關節背伸 10°位時距骨受力面積最大,其次為中立位時,跖屈 14°位時最小,組間比較差異有統計學意義(P<0.05);同一體位植入前后距骨受力面積比較,差異無統計學意義(t=0.804,P=0.458;t=1.384,P=0.225;t=0.147,P=0.889)。距骨部件受力面積分別為 (0.68±0.05)、(0.78±0.07)、(0.56±0.09)cm2。
踝關節位于中立位、背伸 10°位、跖屈 14 °位時,距骨部件植入前距骨所受壓強分別為(4.64±0.50)、(3.88±0.58)、(5.77±0.78)MPa,植入后分別為(4.59±0.46)、(3.87±0.47)、(5.71±0.96)MPa。距骨部件植入前,踝關節跖屈 14°位時距骨所受壓強最大,其次為中立位時,背伸 10°位時最小,組間比較差異有統計學意義(P<0.05);同一體位植入前后距骨所受壓強比較,差異無統計學意義(t=0.736,P=0.495;t=0.070,P=0.947;t=0.180,P=0.864)。距骨部件所受壓強分別為(4.23±0.42)、(3.55±0.45)、(5.31±0.91)MPa,與距骨所受壓強比較,差異無統計學意義(t=1.528,P=0.187;t=1.276,P=0.258;t=0.772,P=0.475)。
3 討論
理想的大范圍距骨病損修復重建材料不僅需要修復病灶清理后遺留的缺損,重建缺損關節面使之與距骨剩余關節面齊平,以免產生關節內應力異常,同時要具備良好生物安全性和有利于骨長入的生物相容性。目前,臨床常采用松質骨填充囊腔結合自體骨軟骨移植或同種異體距骨移植修復重建大范圍距骨病損[5-6, 14]。自體骨軟骨移植多取自體膝關節股骨髁或髂骨翼,存在供區損傷、關節面不匹配、軟骨形態厚度不匹配等問題。而同種異體骨需要術者根據受體距骨病灶形狀進行截骨,由于距骨形態不規則,故存在截骨不準確、不能與受體距骨精確匹配重建的問題,可能導致術后關節內應力異常、骨關節炎等,影響手術療效或發生手術失敗[15-16]。而且同種異體骨的來源也有限,植入后還存在排斥反應[5-6, 10]。為解決以上問題,有學者設計制作了組配式金屬植入物,該植入物具有 15 種型號以匹配不同關節面曲度,但是這些預先成型的距骨部件假體與受體距骨形態仍不能完全匹配[13, 17]。
3D 打印技術現已廣泛用于臨床骨科治療,通過該技術可個性化打印截骨導板、骨骼模型以及定制假體。目前,鈦合金材料已用于 3D 打印髖、膝及骨盆定制假體,其生物相容性和安全性良好,多孔結構還有利于骨長入及骨融合[18-22]。因此,本研究選擇鈦合金材料打印距骨部件。結果顯示,3D 打印的距骨部件大小、形態及關節面弧度與切除部分完全一致,植入后與受體距骨形態匹配,采用螺釘可穩定固定植入部件。我們進一步在踝關節標本進行截骨和距骨部件植入操作,生物力學測試植入前后關節內應力變化,分析距骨部件設計以及植入操作對于關節內應力的影響,以期為臨床應用奠定基礎。結果顯示,距骨部件植入前,正常踝關節背伸 10°位時距骨受力面積最大,其次為中立位時,跖屈 14°位時最小;同一體位手術前后距骨受力面積比較差異無統計學意義。而不同體位下正常踝關節內距骨所受壓強與面積相反,跖屈 14°位時距骨所受壓強最大,其次為中立位時,背伸 10°位時最小;同一體位手術前后距骨所受壓強比較差異無統計學意義;而且距骨部件所受壓強與距骨整體所受壓強亦無明顯差異。表明大范圍距骨病損清除后可使用 3D 打印距骨部件進行精確修復重建,修復局部所受壓強無明顯變化,不會產生異常應力,提示其臨床應用可行性。
但本研究也存在一些不足:首先,僅探討了踝關節標本靜止狀態下關節面受力特征,未模擬生理狀態關節周圍肌腱等動力結構的影響,而在體踝關節的穩定依賴于動力和靜力系統共同作用,本研究未能體現關節周圍的肌張力和神經肌肉反饋協調作用。其次,生物力學測試時是將踝關節固定在一定角度,未考慮踝關節在整個步態時期的力學特性。因此本研究結論有待進一步明確。
距骨病損臨床常見,可導致踝關節疼痛腫脹和功能障礙,如未及時治療遠期可能發生踝關節和距下關節炎,嚴重影響患者行走功能和生活質量[1-4]。大范圍距骨病損清理后的修復重建是臨床難點,無論選擇自體或同種異體骨軟骨移植,均存在形態不匹配、來源有限等問題,臨床療效不佳[5-10]。近年興起的 3D 打印技術為解決距骨修復重建問題提供了一個理想方式。3D 打印的距骨部件,其大小形態及關節面弧度能與切除的距骨部分達到完全一致,植入后與受體距骨形態高度匹配。本研究擬通過生物力學試驗,探討 3D 打印距骨部件修復重建距骨病損后距骨關節面應力變化,為臨床應用奠定基礎。
1 材料與方法
1.1 實驗標本及主要儀器
6 具新鮮冰凍踝關節尸體標本,由上海交通大學醫學院解剖學系提供。其中,男 3 具,女 3 具;供體年齡(57.4±21.5)歲。膝下 1/3 截肢,儲存于 –20℃ 冰箱,使用前 24 h 取出室溫下解凍。標本無踝足部疾病、外傷或手術史,外形檢查及 CT 掃描證實踝關節形態、活動度和穩定性良好。
自制夾具足踝萬向加載裝置(專利號:ZL 201320664766.0)。壓敏紙(FUJIFILM 公司,日本);Instron5569 電子萬能材料試驗機(Instron 公司,美國);V39 高分辨率彩色掃描儀(EPSON 公司,日本);Matlab R2015a 軟件(MathWorks 公司,美國);醫學圖像處理軟件 3Drecon(上海交通大學);3-matic 軟件、magics 軟件(Materialise 公司,比利時);3D 打印機(上海光韻達三維科技有限公司)。
1.2 3D 打印距骨部件及截骨導板
取 6 具踝關節標本行 CT 掃描,掃描范圍為脛腓骨中下 1/3 至足趾,層厚 0.625 mm。將獲得的原始數據以.dcm 格式導入醫學圖像處理軟件 3Drecon,進行距骨單個骨分割及三維重建,制備距骨三維重建模型。將該模型數據以.stl 格式導入 3-matic 軟件,建立大小為 1.8 cm×1.8 cm×1.5 cm 的長方體包裹病灶,然后用建立的長方體布爾剪掉距骨,根據此位置及形態設計距骨部件及截骨導板模型。在距骨部件上設計 2 個螺釘孔,該螺釘孔可植入直徑 3.2 mm 埋頭螺釘,且螺釘植入后分別與距骨關節面平行及成 30°角 (圖 1)。將距骨部件模型數據以.stl 格式導入 magics 軟件,進行 3D 打印前數據處理切層。將切層數據導入 3D 打印機,使用鈦合金材料進行 3D 打印,對打印假體進行去支撐、熱處理、拋光等后處理。同法采用尼龍和光敏樹脂打印截骨導板以及距骨模型(圖 2)。
圖1
軟件設計距骨部件嵌入受體距骨并以螺釘固定
Figure1.
3D printed talar component was designed by software and fixed with screws
圖2
3D 打印實體
a. 3D 打印距骨部件;b. 距骨部件及截骨導板嵌入受體距骨
Figure2. 3D printed talar component entitya. 3D printed talar component entity; b. Assembled 3D printed talar component entity and osteotomy guide plate
1.3 3D 打印距骨部件植入方法
取踝關節標本按照臨床常用方法進行內踝截骨顯露距骨病灶。在內踝前方 1 cm 處縱行切開,顯露脛骨遠端,從內踝斜行植入 2 枚空心釘導針、平行關節面植入 1 枚空心釘導針定位,透視下明確導針位置滿意,空心鉆鉆孔定位以便截骨后精確復位固定。退出導針后分離周圍軟組織,充分顯露脛骨遠端內側骨質,使用擺鋸及骨鑿行脛骨遠端內側斜行截骨,將骨塊連同周圍的韌帶關節囊向內側分開,顯露距骨內側穹窿。將制備的 3D 打印截骨導板固定于距骨設定截骨部位,使用擺鋸及骨鑿在截骨導板引導下截除距骨內側(包含病灶)部分;植入 3D 打印距骨部件,從設計的螺釘孔植入 2 枚 Wright 3.2 mm 埋頭螺釘固定,釘頭擰入假體使之低于假體表面。將內踝截骨塊復位,點狀復位鉗臨時固定,確認無上移或旋轉后,在空心鉆鉆孔定位預留的 3 個釘孔內各植入 1 枚空心釘導針,透視下確認位置正確后,測量并選擇合適長度空心螺釘植入,以固定內踝截骨塊。見圖 3。
圖3
3D 打印距骨部件植入步驟
a. 于標本脛骨遠端內側斜行截骨;b、c. 3D 打印截骨導板引導下截除距骨內側包含病灶部分;d、e. 植入 3D 打印距骨部件;f. 將內踝截骨塊復位并螺釘固定
Figure3. Procedure of 3D printed talar component implantationa. Oblique osteotomy at distal medial tibia; b, c. Removal of the talar lesion at the guidance of 3D printed osteotomy guide plate; d, e. 3D printed talar component was implanted and fixed with screws; f. The medial malleolus was reduced and fixed with screws
1.4 生物力學測試
3D 打印距骨部件植入前后測試踝關節內應力。去除 6 具踝關節標本近端脛骨周圍皮膚肌肉等軟組織顯露骨干,以牙托粉固定后,用螺釘固定標本于自制夾具足踝萬向加載裝置,連接于 Instron5569 電子萬能材料試驗機。在踝關節正前方橫行切開,將裁剪為 3 cm×3 cm 大小的壓敏紙插入踝關節腔中,完全覆蓋距骨穹窿。模擬步態站立期踝關節受力大小,分別于踝關節中立位、背伸 10°位及跖屈 14°位時施加 1 500 N 軸向壓力,代表正常人群 1.5~3.0 倍身體質量[11-13]。經 2 min 均勻持續加壓達壓力峰值,并維持 2 min(圖 4)。然后取出壓敏紙,采用掃描儀以 1 200 dpi 精度進行彩色反射掃描,掃描范圍大于壓敏紙面積,圖片大小統一為 2 000×2 000 像素,以 50×50 像素為 1 個單元格進行處理,處理后的結果為 40×40 個單元格,每個單元格的面積約為 0.011 cm2。 根據顯色區域深淺程度及形態確定距骨受力范圍及距骨假體部件位置,參考比色卡,運用 Matlab 軟件測算距骨受力面積及各區域壓強。
圖4
生物力學測試
a. 中立位;b. 背伸 10°位;c. 跖屈 14°位
Figure4. Biomechanical test on ankle specimena. Neutral position; b. The 10° of dorsiflexion; c. The 14° of plantar flexion
1.5 統計學方法
采用 SPSS 22.0 統計軟件進行分析。數據以均數±標準差表示,手術前后不同屈伸角度間比較采用方差分析,兩兩比較采用 SNK 檢驗;同一屈伸角度手術前后比較采用配對 t 檢驗;檢驗水準 α=0.05。
2 結果
踝關節位于中立位、背伸 10°位、跖屈 14 °位時,距骨部件植入前距骨受力面積分別為(3.07±0.35)、(3.53±0.43)、(2.53±0.39)cm2,植入后分別為(3.11±0.36)、(3.62±0.44)、(2.55±0.44)cm2。距骨部件植入前,踝關節背伸 10°位時距骨受力面積最大,其次為中立位時,跖屈 14°位時最小,組間比較差異有統計學意義(P<0.05);同一體位植入前后距骨受力面積比較,差異無統計學意義(t=0.804,P=0.458;t=1.384,P=0.225;t=0.147,P=0.889)。距骨部件受力面積分別為 (0.68±0.05)、(0.78±0.07)、(0.56±0.09)cm2。
踝關節位于中立位、背伸 10°位、跖屈 14 °位時,距骨部件植入前距骨所受壓強分別為(4.64±0.50)、(3.88±0.58)、(5.77±0.78)MPa,植入后分別為(4.59±0.46)、(3.87±0.47)、(5.71±0.96)MPa。距骨部件植入前,踝關節跖屈 14°位時距骨所受壓強最大,其次為中立位時,背伸 10°位時最小,組間比較差異有統計學意義(P<0.05);同一體位植入前后距骨所受壓強比較,差異無統計學意義(t=0.736,P=0.495;t=0.070,P=0.947;t=0.180,P=0.864)。距骨部件所受壓強分別為(4.23±0.42)、(3.55±0.45)、(5.31±0.91)MPa,與距骨所受壓強比較,差異無統計學意義(t=1.528,P=0.187;t=1.276,P=0.258;t=0.772,P=0.475)。
3 討論
理想的大范圍距骨病損修復重建材料不僅需要修復病灶清理后遺留的缺損,重建缺損關節面使之與距骨剩余關節面齊平,以免產生關節內應力異常,同時要具備良好生物安全性和有利于骨長入的生物相容性。目前,臨床常采用松質骨填充囊腔結合自體骨軟骨移植或同種異體距骨移植修復重建大范圍距骨病損[5-6, 14]。自體骨軟骨移植多取自體膝關節股骨髁或髂骨翼,存在供區損傷、關節面不匹配、軟骨形態厚度不匹配等問題。而同種異體骨需要術者根據受體距骨病灶形狀進行截骨,由于距骨形態不規則,故存在截骨不準確、不能與受體距骨精確匹配重建的問題,可能導致術后關節內應力異常、骨關節炎等,影響手術療效或發生手術失敗[15-16]。而且同種異體骨的來源也有限,植入后還存在排斥反應[5-6, 10]。為解決以上問題,有學者設計制作了組配式金屬植入物,該植入物具有 15 種型號以匹配不同關節面曲度,但是這些預先成型的距骨部件假體與受體距骨形態仍不能完全匹配[13, 17]。
3D 打印技術現已廣泛用于臨床骨科治療,通過該技術可個性化打印截骨導板、骨骼模型以及定制假體。目前,鈦合金材料已用于 3D 打印髖、膝及骨盆定制假體,其生物相容性和安全性良好,多孔結構還有利于骨長入及骨融合[18-22]。因此,本研究選擇鈦合金材料打印距骨部件。結果顯示,3D 打印的距骨部件大小、形態及關節面弧度與切除部分完全一致,植入后與受體距骨形態匹配,采用螺釘可穩定固定植入部件。我們進一步在踝關節標本進行截骨和距骨部件植入操作,生物力學測試植入前后關節內應力變化,分析距骨部件設計以及植入操作對于關節內應力的影響,以期為臨床應用奠定基礎。結果顯示,距骨部件植入前,正常踝關節背伸 10°位時距骨受力面積最大,其次為中立位時,跖屈 14°位時最小;同一體位手術前后距骨受力面積比較差異無統計學意義。而不同體位下正常踝關節內距骨所受壓強與面積相反,跖屈 14°位時距骨所受壓強最大,其次為中立位時,背伸 10°位時最小;同一體位手術前后距骨所受壓強比較差異無統計學意義;而且距骨部件所受壓強與距骨整體所受壓強亦無明顯差異。表明大范圍距骨病損清除后可使用 3D 打印距骨部件進行精確修復重建,修復局部所受壓強無明顯變化,不會產生異常應力,提示其臨床應用可行性。
但本研究也存在一些不足:首先,僅探討了踝關節標本靜止狀態下關節面受力特征,未模擬生理狀態關節周圍肌腱等動力結構的影響,而在體踝關節的穩定依賴于動力和靜力系統共同作用,本研究未能體現關節周圍的肌張力和神經肌肉反饋協調作用。其次,生物力學測試時是將踝關節固定在一定角度,未考慮踝關節在整個步態時期的力學特性。因此本研究結論有待進一步明確。