引用本文: 許固軍, 馬明陽, 張帥, 劉宇博, 孔祥朋, 柴偉. Mako機器人輔助人工全髖關節置換術在發育性髖關節發育不良中的應用. 中國修復重建外科雜志, 2021, 35(10): 1233-1239. doi: 10.7507/1002-1892.202105013 復制
版權信息: ?四川大學華西醫院華西期刊社《中國修復重建外科雜志》版權所有,未經授權不得轉載、改編
人工全髖關節置換術(total hip arthroplasty,THA)被認為是 20 世紀最成功的骨科手術之一,據統計約 80% 患者假體生存期達 25 年以上[1]。THA 術后患者滿意度與髖臼位置(外展、前傾)以及旋轉中心恢復情況密切相關,如髖臼外展及前傾未恢復至理想位置,可能影響術后髖臼假體覆蓋、外展肌功能、關節穩定性、假體撞擊的發生、假體表面磨損程度和假體長期生存等方面[2]。
發育性髖關節發育不良(developmental dysplasia of the hip,DDH)患者大多在成年后出現繼發性骨關節炎,需要接受 THA 治療。由于 DDH 患者髖關節解剖結構發生了改變,相對于因其他病因行 THA 者,對術者手術技術要求更高,髖臼假體安放容錯性更低[3]。相關三維模型研究顯示,與傳統 THA 相比,機器人輔助 THA 可顯著提高術中假體定位準確性[4-6],基于此我們將該技術應用于 DDH 患者 THA 中。
美國 Stryker 公司研發的 Mako 機器人是一種半主動封閉型機器人系統,自 2006 年開始應用于臨床以來,已成為臨床應用最多、應用范圍最廣泛的機器人。研究表明,該機器人輔助 THA 術中髖臼定位具有明顯優勢[7],但目前主要應用于原發性骨關節炎、股骨頭壞死等簡單病例[8],用于 DDH、融合髖、陳舊性髖臼骨折等復雜病例中的報道有限[9-10]。2018 年 8 月—2020 年 1 月,解放軍總醫院骨科醫學部采用 Mako 機器人輔助 THA 治療 55 例(75 髖)DDH。現回顧患者臨床資料,總結近期療效及臨床應用經驗。報告如下。
1 臨床資料
1.1 一般資料
本組男 10 例,女 45 例;年齡 30~73 歲,平均 51 歲。身體質量指數為 18.4~37.5 kg/m2,平均 24.2 kg/m2。單髖 35 例,其中左髖 21 例、右髖 14 例;雙髖 20 例。DDH 分型:Crowe Ⅰ型 29 髖,Ⅱ型 20 髖,Ⅲ型 6 髖,Ⅳ型 20 髖。均繼發骨關節炎,病程 14 ~ 33 年,平均 23.9 年;存在關節疼痛癥狀。術前改良 Harris 評分為(54.8±16.0)分,髖關節活動度為 90°(80°,100°),雙下肢長度差為 22.0(10.5,47.0) mm。術側曾行髖臼造蓋術 8 髖、截骨術 12 髖,對側曾行 THA 1 髖,腰椎內固定術 1 例。
1.2 手術方法
本組雙髖患者中 4 例一期雙側置換;16 例因一側需行股骨轉子下短縮截骨選擇分期手術,其中截骨側先手術。
1.2.1 術前規劃
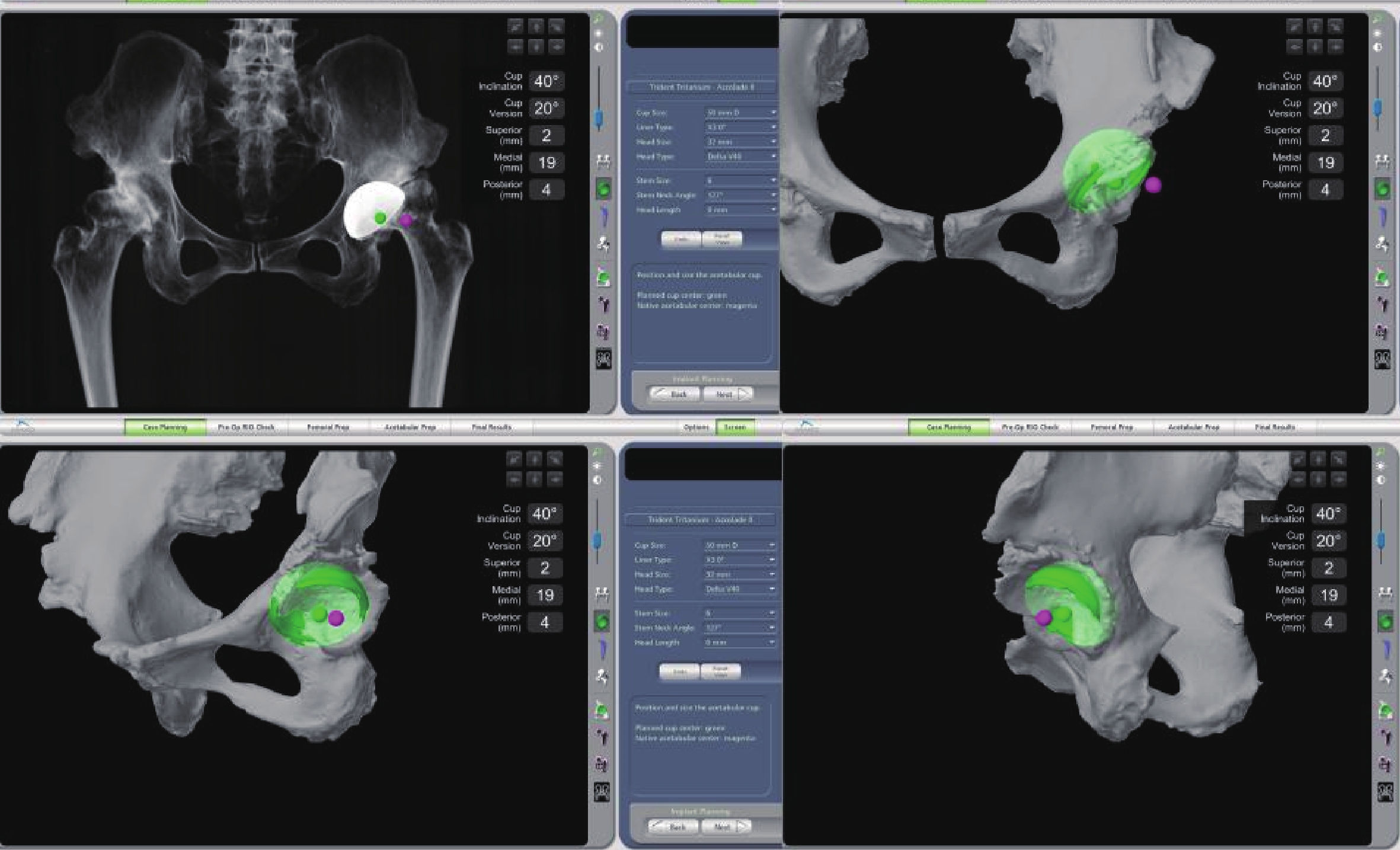
入院后行患側髖、膝關節 CT 掃描,將數據導入 Mako 機器人系統,創建患者骨盆和股骨近端三維模型,用于確定假體位置和大小。其中,CroweⅠ、Ⅳ型髖臼假體原位放置,Ⅳ型注意髖臼前、后壁覆蓋,臼杯直徑一般選擇 44 mm。CroweⅡ、Ⅲ型根據髖臼骨量及假體覆蓋情況,將髖臼假體位置適度上移。因 DDH 患者股骨側解剖變異較大,本組股骨側均手動操作。見圖 1。
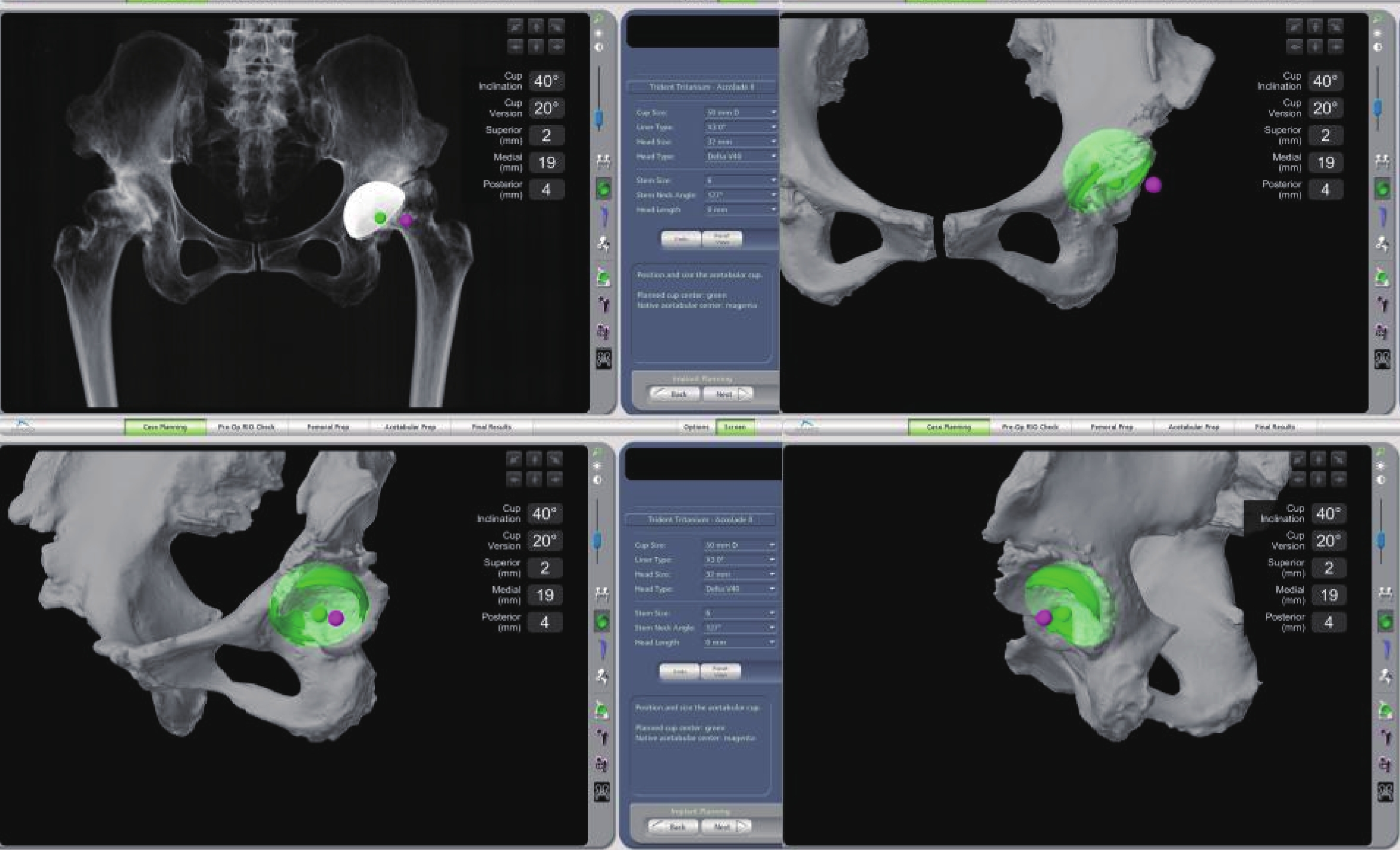 圖1
術前基于 CT 數據于 Mako 機器人系統中規劃髖臼假體位置
Figure1.
Preoperative planning acetabular position in the Mako robot system based on CT
圖1
術前基于 CT 數據于 Mako 機器人系統中規劃髖臼假體位置
Figure1.
Preoperative planning acetabular position in the Mako robot system based on CT
1.2.2 手術操作
插管全麻后,患者取側臥位,術側朝上。于膝關節髕骨下緣貼遠端標記釘,作為術中下肢長度的一個遠端檢查點;常規消毒鋪巾后,于髂前上棘上緣安裝 3 枚螺紋釘及骨盆參考架并牢固固定。
作髖關節后外側切口,逐層切開皮膚、皮下組織、闊筋膜張肌,顯露股骨大轉子,于大轉子外緣安裝近端標記釘。髖關節脫位前,用探針分別采集大轉子外緣及髕骨下緣標記點,識別患肢相對位置,用于評價肢體延長長度及術側髖臼偏心距。髖關節脫位后行股骨頸常規截骨,注意暴露髖臼上緣以及前、后壁(髖臼注冊點分布區域),Crowe Ⅲ及Ⅳ型 DDH 可以根據術前三維模型顯示的髖臼與股骨小轉子對應關系尋找真臼。充分顯露髖臼后,在髖臼上緣大約 12 點位置安裝標記釘,標記釘植入位置應不影響髖臼磨銼;用探針采集髖臼窩及髖周骨質,以確認注冊和骨盆位置。
系統定義 3 個髖臼方向的判定點(初始注冊、近似匹配)、32 個待注冊點(精確注冊、精確匹配)和 8 個確認點(圖 2a)。初始注冊時必須選擇系統顯示的確切解剖位置,否則注冊無法通過。精確注冊時,盡量分散注冊點以確保注冊準確性,注冊點之間距離≥5 mm;同時探針針尖接觸骨質,避免在骨贅或軟組織表面注冊。然后用探針確認系統隨機產生的 8 個確認點,驗證注冊準確性。CroweⅠ型髖臼上方覆蓋不足時盡量在真臼上注冊,Crowe Ⅳ型充分顯露髖臼后在真臼上完成全部注冊點,Crowe Ⅱ、Ⅲ型注冊時參照系統中的計劃注冊點。注冊完成后即可確定髖臼空間位置。
 圖2
Mako 機器人術中操作
圖2
Mako 機器人術中操作
a. 髖臼注冊;b. 髖臼磨銼
Figure2. Mako robot intraoperative operationa. Registering the acetabulum; b. Reaming the acetabulum
上述操作完成后可以進行髖臼準備,系統可提供視覺、觸覺及聽覺反饋,髖臼磨銼深度可由系統中髖臼模型顏色變化反饋,初始顏色為綠色,磨銼完成變為白色,如果超出計劃磨銼范圍 1 mm,模型將變為紅色(圖 2b)。磨銼完成后,在機械臂輔助下按既定外展角和前傾角植入生物型臼杯,植入過程中系統可實時顯示臼杯植入深度和角度,完成后植入螺釘及內襯。手動處理股骨側,當術前測量股骨前傾角>30° 時使用組配式假體,復位困難時行股骨轉子下短縮截骨;復位完成后測試關節穩定性,再次注冊近端及遠端標記釘以顯示患肢延長長度及髖臼偏心距。
1.3 術后處理及療效評價指標
術后常規抗感染及抗凝治療,多模式鎮痛。置換術中行短縮截骨者于術后第 3 天開始扶雙拐部分負重行走,出院后扶雙拐助行 2 個月,之后更換單拐或手杖助行 1 個月。未行短縮截骨者術后第 1 天即可扶雙拐下地行走,2 個月后改為單拐或手杖助行 1 個月。
術后定期隨訪,記錄髖關節 Harris 評分、關節活動度及并發癥發生情況。復查骨盆正位 X 線片,于術后 3 個月測量髖關節旋轉中心在水平方向和垂直方向與淚滴距離(水平距離、垂直距離)、髖臼外展角及前傾角、雙下肢長度差。將術后髖臼外展角和前傾角與 Lewinnek 安全區(外展角 30°~50°、前傾角 5°~25°)[11]進行比較,驗證假體位置準確性。
1.4 統計學方法
采用 SPSS25.0 統計軟件進行分析。計量資料如符合正態分布以均數±標準差表示,手術前后比較采用配對t檢驗;不符合正態分布以中位數(四分位數間距)表示,手術前后比較采用 Wilcoxon 秩和檢驗。檢驗水準α=0.05。
2 結果
2.1 假體位置準確性評價
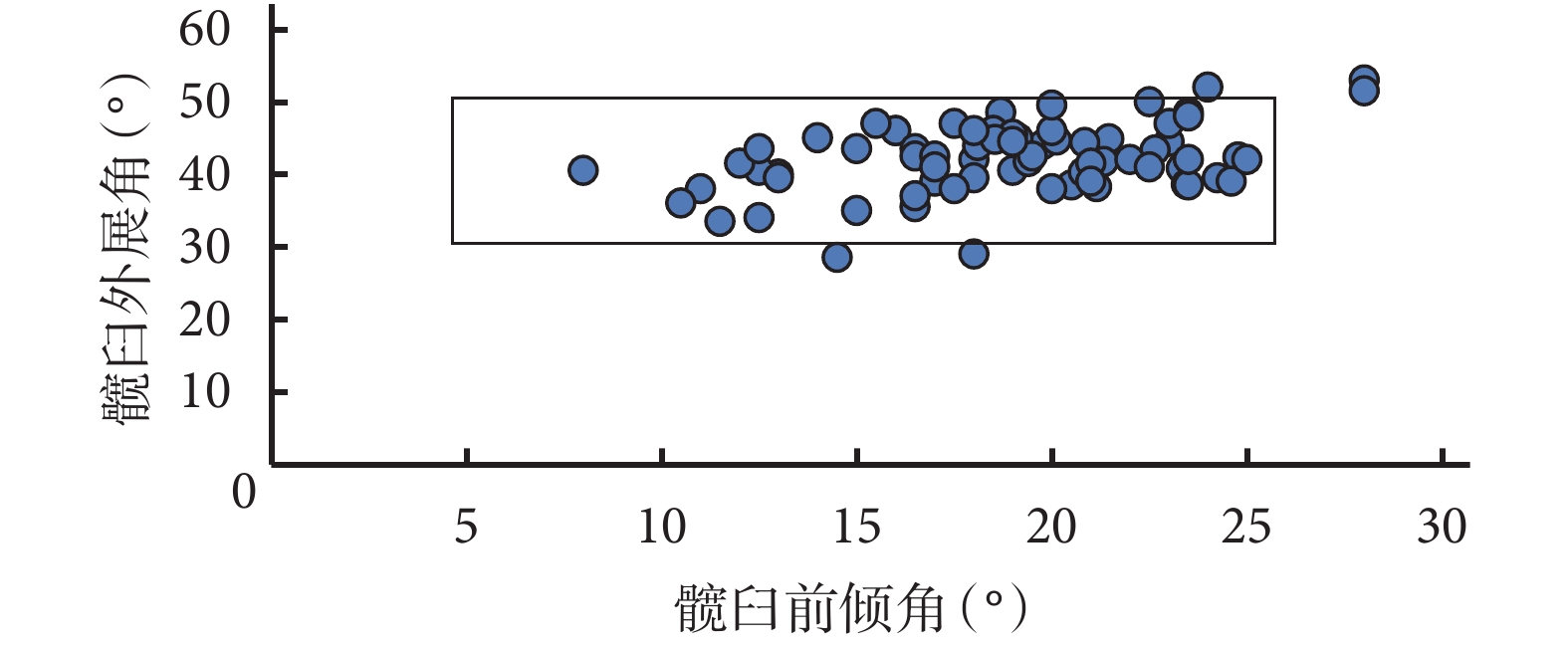
本組手術均在 Mako 機器人輔助下完成。術前規劃髖臼外展角與術后測量值差異無統計學意義(t=1.603,P=0.113),髖臼前傾角差異有統計學意義(t=?2.482,P=0.015);髖關節旋轉中心水平距離及垂直距離與術后測量值比較,差異均無統計學意義(P>0.05)。見表 1。其中 4 髖(5.3%)位于 Lewinnek安全區以外,71 髖(94.7%)位于 Lewinnek 安全區以內(圖 3)。
 )
Table1.
Comparison between preoperative planning and postoperative measuring of acetabular cup (n=75,
)
Table1.
Comparison between preoperative planning and postoperative measuring of acetabular cup (n=75,  )
)
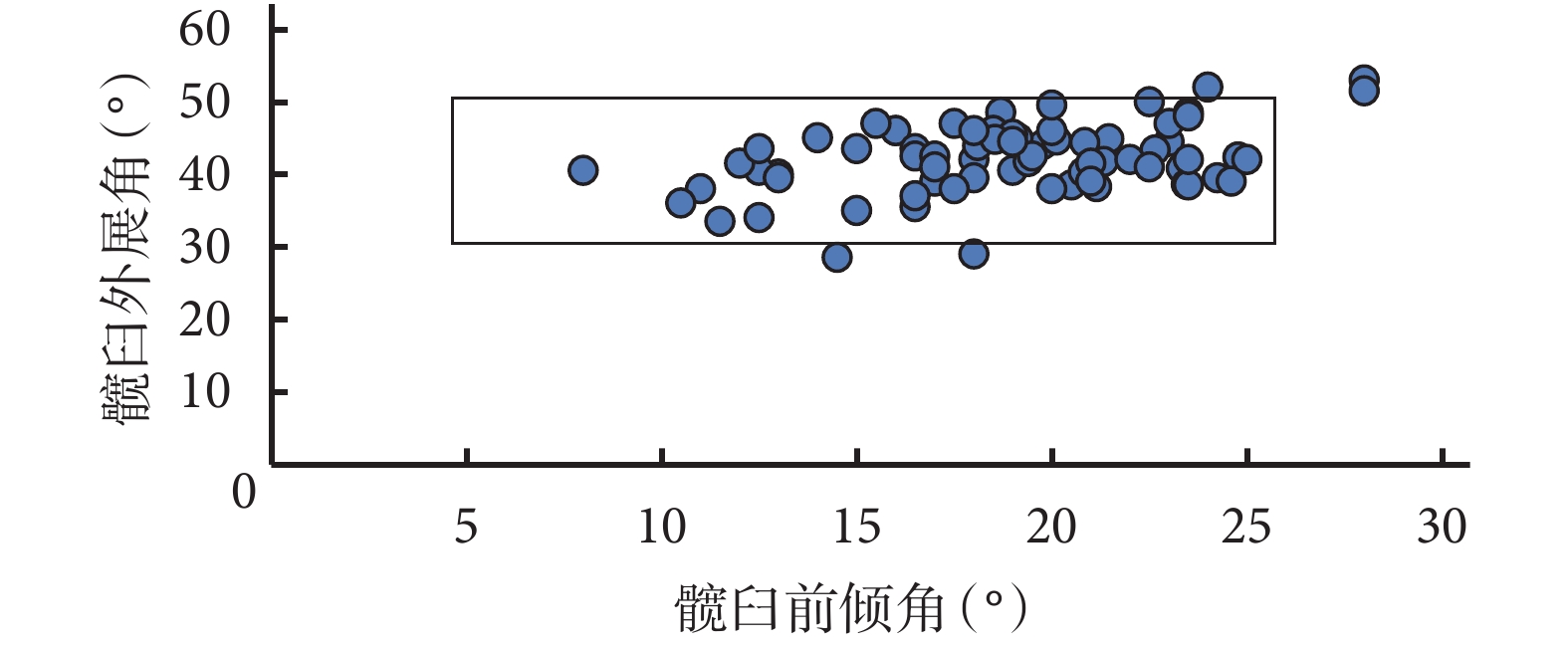 圖3
術后髖臼假體的 Lewinnek 安全區分布圖
Figure3.
Distribution of Lewinnek safety zone of acetabular cup
圖3
術后髖臼假體的 Lewinnek 安全區分布圖
Figure3.
Distribution of Lewinnek safety zone of acetabular cup
2.2 臨床療效評價
患者術后均獲隨訪,隨訪時間 6~24 個月,平均 13 個月。術后切口均Ⅰ期愈合。1 例單髖 Crowe Ⅳ型患者出現下肢感覺障礙、無活動受限,維持屈髖、屈膝體位并給予營養神經藥物治療 1 周后癥狀消失。末次隨訪時,髖關節改良 Harris 評分為(85.5±11.2)分,髖關節活動度為 120°(110°,120°),均較術前改善,差異有統計學意義(t=?14.215,P=0.000;Z=?7.380,P=0.000)。術后 3 個月,X 線片測量示雙下肢長度差為 3.8(2.0,8.1)mm,較術前明顯改善(Z=–6.667,P=0.000)。隨訪期間無其他 THA 相關并發癥發生,假體無松動征象,無翻修發生。見圖 4。
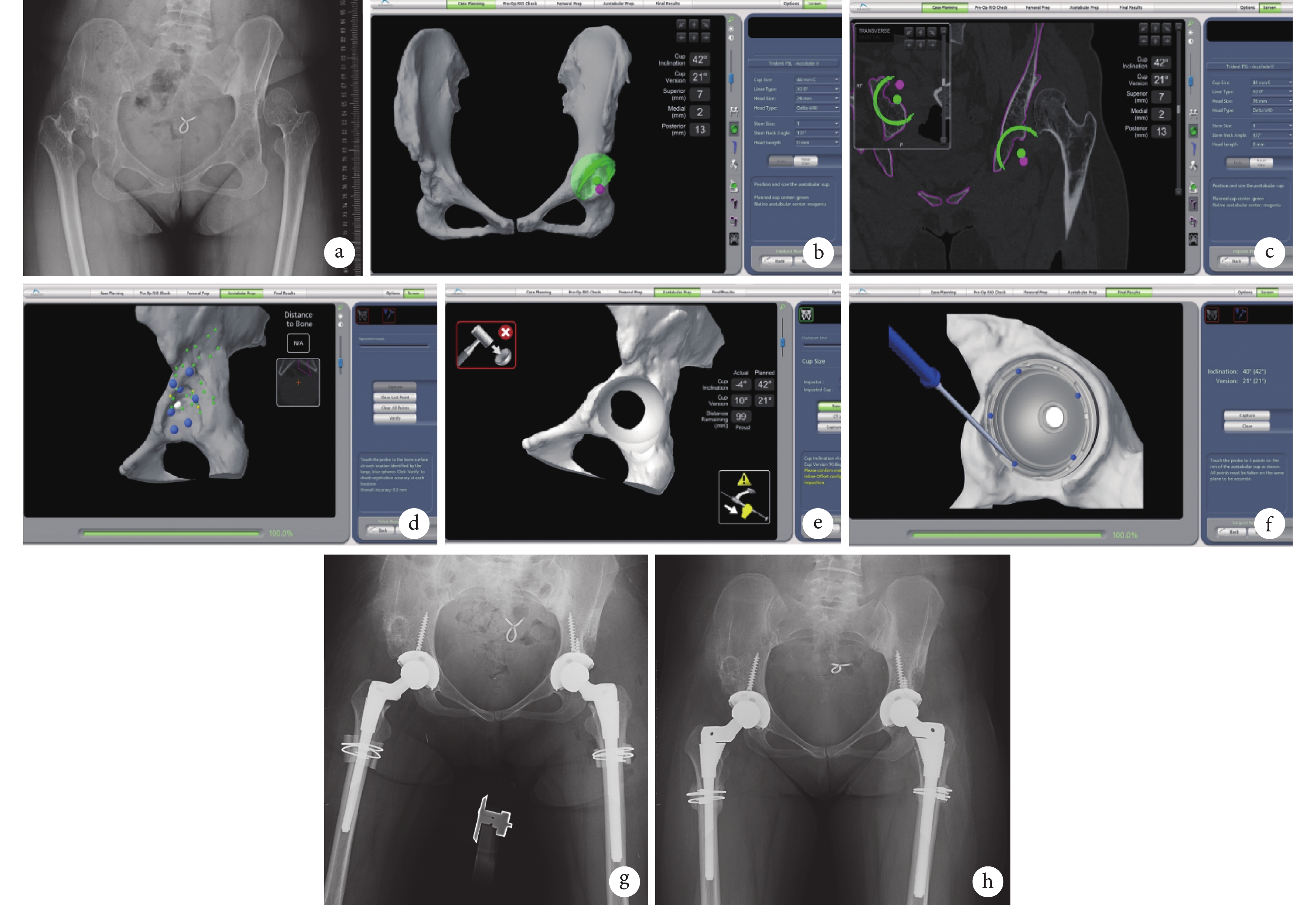 圖4
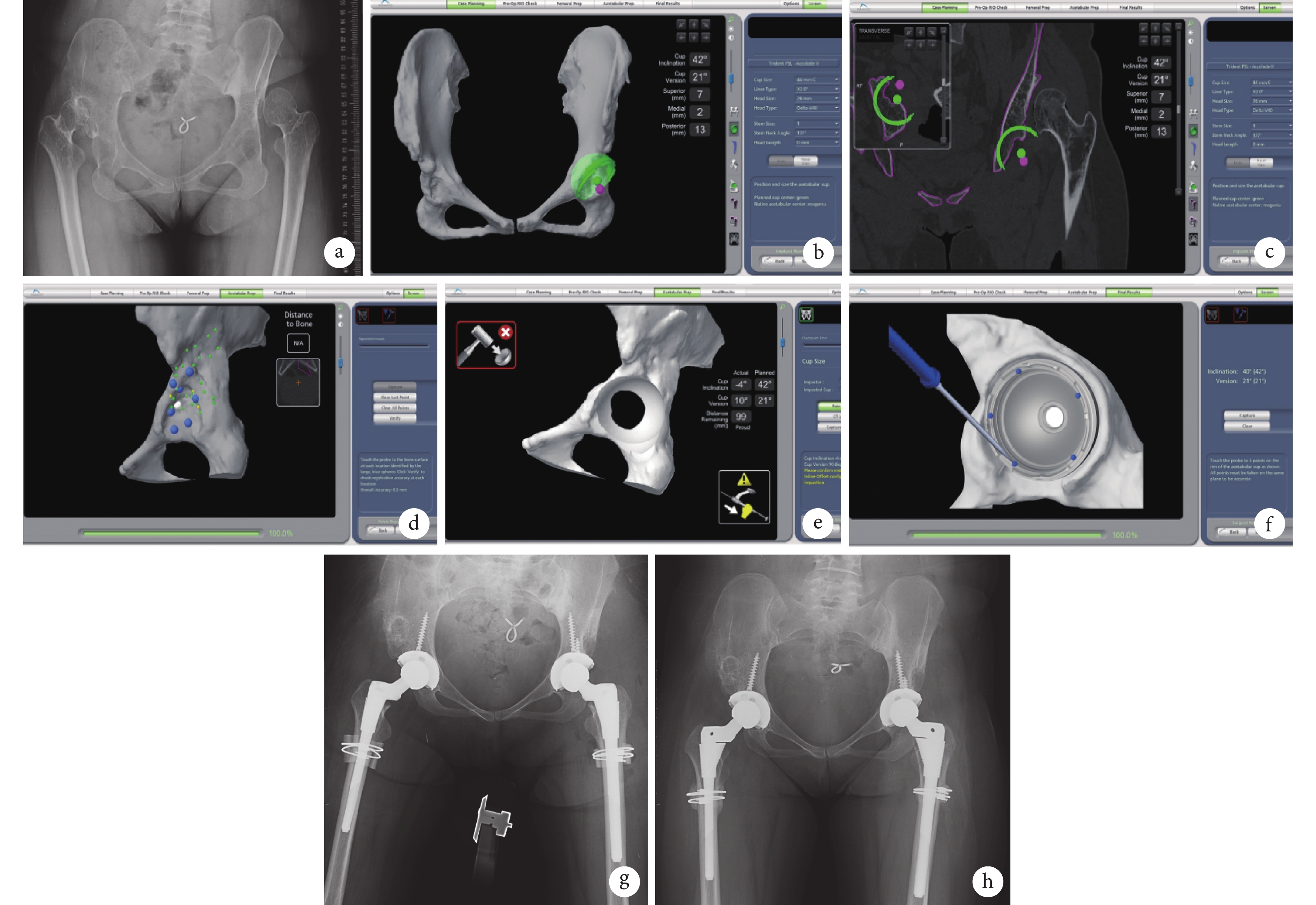
患者,女,30 歲,雙側 Crowe Ⅳ 型 DDH
圖4
患者,女,30 歲,雙側 Crowe Ⅳ 型 DDH
a. 術前 X 線片;b、c. 術前規劃左髖臼杯位置;d. 術中髖臼注冊;e. 術中髖臼磨銼完成;f. 術中臼杯安裝完成后測定外展角和前傾角;g. 術后 3 d X 線片;h. 術后 1 年假體位置良好,無松動
Figure4. A 30-year-old female patient with bilateral DDHs (Crowe type Ⅳ)a. Preoperative X-ray film; b, c. Planning the position of the left acetabular cup before operation; d. Registering acetabulum during operation; e. Reaming the acetabulum during operation; f. Measuring the inclination angle and anteversion angle after the installation of the acetabular cup; g. X-ray film at 3 days after operation; h. X-ray film at 1 year after operation, showing no sign of loosening
3 討論
3.1 機器人輔助 THA 的準確性
THA 髖臼假體位置不良會導致雙下肢不等長、髖關節脫位、假體磨損等[12]。研究發現術者經驗對髖臼假體安放影響較大,而術者易高估外展角、低估前傾角[13]。機器人輔助 THA 是在機械臂輔助下對髖臼假體放置位置進行定位,可以更準確磨銼髖臼,并實時反饋磨銼深度、角度以及臼壁厚度,指引磨銼方向;同時機械臂可以把控臼杯植入方向,使其與磨銼角度保持一致,減少臼杯植入角度誤差。Lewinnek 等[11]和 Callanan 等[14]根據術后假體穩定性提出了臼杯“安全區”的概念,即外展角 30°~50°、前傾角 5°~25° 區域。Lewinnek 等[11]指出如髖臼杯放置在安全區內,術后關節脫位率僅為 1.5%,而放置于安全區外,關節脫位率達 6.1%。Kanawade 等[15]的研究顯示以 ±5° 誤差為極限值,機器人輔助下臼杯放置的外展精確度為 88%、前傾精確度為 84%。Domb 等[16]報道機器人輔助下臼杯放置在安全區比例明顯高于手動和術中透視下手術。
本組術后測量髖臼前傾角與術前規劃值存在統計學差異,但髖臼外展角以及髖關節旋轉中心位置與術前計劃一致,且 71 髖(94.7%)均位于 Lewinnek 安全區內。我們分析髖臼前傾角術前規劃與術中實際放置存在差異,可能與術前規劃基于 CT 數據測量,而術后基于 X 線片測量,測量結果受攝片體位影響較大有關。
另外,CT 圖像上 DDH 髖臼通常表現為前壁或后壁骨量缺失[17],如偏心磨銼會造成醫源性骨缺損加重,無法保證臼杯初始穩定性。傳統手術與機器人輔助手術的對比研究顯示,機器人輔助下可以采用單次磨銼,更好地保留骨量、控制髖臼磨銼深度。機器人系統設定采用小于術前設計臼杯尺寸 3 mm 或以上的髖臼銼時,術者可以手動操作機械臂在較大范圍內磨銼,磨銼角度(外展角和前傾角)所受限制較小;但髖臼銼逐級增大至僅小于計劃臼杯 2 mm 時,磨銼角度會限制在術前計劃 ±10° 范圍內,有效避免出現較大誤差[18]。由于對髖臼長期穩定的要求,既要滿足覆蓋率又要使用大直徑股骨頭降低脫位風險,很難選擇最佳的髖臼大小[19]。機器人輔助 THA 可以植入比患者自身更小的股骨頭假體,而且不會增加術后脫位風險[20]。本組 75 髖均按術前計劃準確磨銼及安裝髖臼假體,未發生垂直和水平方向上錯位,并基于三維 CT 模板實現了最大髖臼覆蓋,術后隨訪未發現假體松動或脫位。
3.2 機器人輔助手術療效分析
目前,有關髖臼假體位置與 DDH 患者術后髖關節功能關系的研究較少,THA 本身能否改善此類患者髖關節活動度尚存在爭議。本組術后患者髖關節活動度明顯改善,但該改善效果是否與機器人輔助手術相關,需要進一步前瞻性對比研究。
雙下肢不等長是 THA 術后并發癥之一,在 DDH 患者中更明顯。雖然股骨柄的選擇是髖關節偏心距、下肢長度恢復的主要影響因素,但髖臼假體任一平面的細微變化都可能對整個髖關節結構產生影響[21]。El Bitar 等[22]報道機器人輔助手術在預測術后雙下肢長度差方面有明顯優勢,本組術后雙下肢長度差與術前比較有明顯改善。也有研究指出機器人輔助 THA 術后雙下肢長度差的改善可能與股骨垂直偏心距的恢復有關[23],因此有待進一步研究細化髖臼側和股骨側對下肢長度恢復的影響。
關于機器人輔助手術在改善臨床療效方面的有效性仍存在爭議。Honl 等[24]報道,與對照組相比,機器人輔助手術組術后可獲得更高的 Harris 評分。然而 Bargar 等[25]研究顯示機器人輔助組在 Harris 評分或簡明健康調查量表(SF-36 量表)方面無明顯優勢。也有研究認為對于經驗豐富的骨科醫生,使用機器人輔助手術系統不僅不能獲得更理想的手術效果,還存在安裝成本、額外輻射暴露、配套假體類型單一等局限性[26]。我們前期研究證實了機器人輔助技術用于治療股骨頭壞死的有效性,具有臼杯放置準確度提高、手術時間和術后住院時間縮短等優點[8, 27]。Perets 等[28]的臨床隨訪顯示機器人輔助 THA 并發癥發生率及翻修率與傳統手術相似。本組術后均未出現 THA 相關的并發癥,可能與手術例數較少、隨訪時間短有關,需要長期隨訪及對照研究。
3.3 機器人輔助手術存在問題
我們在臨床應用過程中發現機器人輔助 THA 存在一些局限性,包括:① 對術前三維 CT 檢查的窗位、層厚、患者體位、掃描范圍均有特殊要求,常出現無效影像。② DDH 術中注冊需要在真臼或較好骨質上完成,避免在骨贅、軟組織上進行注冊。③ 機器人系統測量的雙下肢長度差為髖關節局部長度差,并不能完全反映真實下肢長度。④ 與機器人配套的假體類型單一,沒有多孔臼杯,只能與高交聯聚乙烯內襯相匹配,在 Crowe Ⅳ型 DDH 中臼杯使用受限;且股骨側沒有組配式假體,也在一定程度上限制了其應用。⑤ 植入骨盆陣列需要作額外切口和增加軟組織損傷,可能發生固定釘切口滲血、感染等并發癥,對于有髖臼截骨術手術史患者因髂前上棘缺失存在固定困難問題。
綜上述,機器人輔助 THA 治療 DDH 可提高髖臼磨銼及假體植入準確性,獲得較好早期療效。但本研究為回顧性研究,病例數較少,隨訪時間較短,缺少對照,同時由于早期應用多選擇相對簡單病例,手術由多名術者完成,術者經驗可能會使研究結果產生偏差,因此本研究結論及遠期療效均有待進一步明確。
作者貢獻:許固軍參與實驗設計及實施、起草文章;張帥、劉宇博參與實驗實施、數據收集;許固軍、馬明陽參與數據整理與分析;孔祥朋、柴偉負責實驗設計、文章審閱與修改。
利益沖突:所有作者聲明,在課題研究和文章撰寫過程中不存在利益沖突。項目經費支持沒有影響文章觀點和對研究數據客觀結果的統計分析及其報道。
機構倫理問題:研究方案經解放軍總醫院醫學倫理委員會批準(倫審第 S2018-014-01 號)。
人工全髖關節置換術(total hip arthroplasty,THA)被認為是 20 世紀最成功的骨科手術之一,據統計約 80% 患者假體生存期達 25 年以上[1]。THA 術后患者滿意度與髖臼位置(外展、前傾)以及旋轉中心恢復情況密切相關,如髖臼外展及前傾未恢復至理想位置,可能影響術后髖臼假體覆蓋、外展肌功能、關節穩定性、假體撞擊的發生、假體表面磨損程度和假體長期生存等方面[2]。
發育性髖關節發育不良(developmental dysplasia of the hip,DDH)患者大多在成年后出現繼發性骨關節炎,需要接受 THA 治療。由于 DDH 患者髖關節解剖結構發生了改變,相對于因其他病因行 THA 者,對術者手術技術要求更高,髖臼假體安放容錯性更低[3]。相關三維模型研究顯示,與傳統 THA 相比,機器人輔助 THA 可顯著提高術中假體定位準確性[4-6],基于此我們將該技術應用于 DDH 患者 THA 中。
美國 Stryker 公司研發的 Mako 機器人是一種半主動封閉型機器人系統,自 2006 年開始應用于臨床以來,已成為臨床應用最多、應用范圍最廣泛的機器人。研究表明,該機器人輔助 THA 術中髖臼定位具有明顯優勢[7],但目前主要應用于原發性骨關節炎、股骨頭壞死等簡單病例[8],用于 DDH、融合髖、陳舊性髖臼骨折等復雜病例中的報道有限[9-10]。2018 年 8 月—2020 年 1 月,解放軍總醫院骨科醫學部采用 Mako 機器人輔助 THA 治療 55 例(75 髖)DDH。現回顧患者臨床資料,總結近期療效及臨床應用經驗。報告如下。
1 臨床資料
1.1 一般資料
本組男 10 例,女 45 例;年齡 30~73 歲,平均 51 歲。身體質量指數為 18.4~37.5 kg/m2,平均 24.2 kg/m2。單髖 35 例,其中左髖 21 例、右髖 14 例;雙髖 20 例。DDH 分型:Crowe Ⅰ型 29 髖,Ⅱ型 20 髖,Ⅲ型 6 髖,Ⅳ型 20 髖。均繼發骨關節炎,病程 14 ~ 33 年,平均 23.9 年;存在關節疼痛癥狀。術前改良 Harris 評分為(54.8±16.0)分,髖關節活動度為 90°(80°,100°),雙下肢長度差為 22.0(10.5,47.0) mm。術側曾行髖臼造蓋術 8 髖、截骨術 12 髖,對側曾行 THA 1 髖,腰椎內固定術 1 例。
1.2 手術方法
本組雙髖患者中 4 例一期雙側置換;16 例因一側需行股骨轉子下短縮截骨選擇分期手術,其中截骨側先手術。
1.2.1 術前規劃
入院后行患側髖、膝關節 CT 掃描,將數據導入 Mako 機器人系統,創建患者骨盆和股骨近端三維模型,用于確定假體位置和大小。其中,CroweⅠ、Ⅳ型髖臼假體原位放置,Ⅳ型注意髖臼前、后壁覆蓋,臼杯直徑一般選擇 44 mm。CroweⅡ、Ⅲ型根據髖臼骨量及假體覆蓋情況,將髖臼假體位置適度上移。因 DDH 患者股骨側解剖變異較大,本組股骨側均手動操作。見圖 1。
圖1
術前基于 CT 數據于 Mako 機器人系統中規劃髖臼假體位置
Figure1.
Preoperative planning acetabular position in the Mako robot system based on CT
1.2.2 手術操作
插管全麻后,患者取側臥位,術側朝上。于膝關節髕骨下緣貼遠端標記釘,作為術中下肢長度的一個遠端檢查點;常規消毒鋪巾后,于髂前上棘上緣安裝 3 枚螺紋釘及骨盆參考架并牢固固定。
作髖關節后外側切口,逐層切開皮膚、皮下組織、闊筋膜張肌,顯露股骨大轉子,于大轉子外緣安裝近端標記釘。髖關節脫位前,用探針分別采集大轉子外緣及髕骨下緣標記點,識別患肢相對位置,用于評價肢體延長長度及術側髖臼偏心距。髖關節脫位后行股骨頸常規截骨,注意暴露髖臼上緣以及前、后壁(髖臼注冊點分布區域),Crowe Ⅲ及Ⅳ型 DDH 可以根據術前三維模型顯示的髖臼與股骨小轉子對應關系尋找真臼。充分顯露髖臼后,在髖臼上緣大約 12 點位置安裝標記釘,標記釘植入位置應不影響髖臼磨銼;用探針采集髖臼窩及髖周骨質,以確認注冊和骨盆位置。
系統定義 3 個髖臼方向的判定點(初始注冊、近似匹配)、32 個待注冊點(精確注冊、精確匹配)和 8 個確認點(圖 2a)。初始注冊時必須選擇系統顯示的確切解剖位置,否則注冊無法通過。精確注冊時,盡量分散注冊點以確保注冊準確性,注冊點之間距離≥5 mm;同時探針針尖接觸骨質,避免在骨贅或軟組織表面注冊。然后用探針確認系統隨機產生的 8 個確認點,驗證注冊準確性。CroweⅠ型髖臼上方覆蓋不足時盡量在真臼上注冊,Crowe Ⅳ型充分顯露髖臼后在真臼上完成全部注冊點,Crowe Ⅱ、Ⅲ型注冊時參照系統中的計劃注冊點。注冊完成后即可確定髖臼空間位置。
圖2
Mako 機器人術中操作
a. 髖臼注冊;b. 髖臼磨銼
Figure2. Mako robot intraoperative operationa. Registering the acetabulum; b. Reaming the acetabulum
上述操作完成后可以進行髖臼準備,系統可提供視覺、觸覺及聽覺反饋,髖臼磨銼深度可由系統中髖臼模型顏色變化反饋,初始顏色為綠色,磨銼完成變為白色,如果超出計劃磨銼范圍 1 mm,模型將變為紅色(圖 2b)。磨銼完成后,在機械臂輔助下按既定外展角和前傾角植入生物型臼杯,植入過程中系統可實時顯示臼杯植入深度和角度,完成后植入螺釘及內襯。手動處理股骨側,當術前測量股骨前傾角>30° 時使用組配式假體,復位困難時行股骨轉子下短縮截骨;復位完成后測試關節穩定性,再次注冊近端及遠端標記釘以顯示患肢延長長度及髖臼偏心距。
1.3 術后處理及療效評價指標
術后常規抗感染及抗凝治療,多模式鎮痛。置換術中行短縮截骨者于術后第 3 天開始扶雙拐部分負重行走,出院后扶雙拐助行 2 個月,之后更換單拐或手杖助行 1 個月。未行短縮截骨者術后第 1 天即可扶雙拐下地行走,2 個月后改為單拐或手杖助行 1 個月。
術后定期隨訪,記錄髖關節 Harris 評分、關節活動度及并發癥發生情況。復查骨盆正位 X 線片,于術后 3 個月測量髖關節旋轉中心在水平方向和垂直方向與淚滴距離(水平距離、垂直距離)、髖臼外展角及前傾角、雙下肢長度差。將術后髖臼外展角和前傾角與 Lewinnek 安全區(外展角 30°~50°、前傾角 5°~25°)[11]進行比較,驗證假體位置準確性。
1.4 統計學方法
采用 SPSS25.0 統計軟件進行分析。計量資料如符合正態分布以均數±標準差表示,手術前后比較采用配對t檢驗;不符合正態分布以中位數(四分位數間距)表示,手術前后比較采用 Wilcoxon 秩和檢驗。檢驗水準α=0.05。
2 結果
2.1 假體位置準確性評價
本組手術均在 Mako 機器人輔助下完成。術前規劃髖臼外展角與術后測量值差異無統計學意義(t=1.603,P=0.113),髖臼前傾角差異有統計學意義(t=?2.482,P=0.015);髖關節旋轉中心水平距離及垂直距離與術后測量值比較,差異均無統計學意義(P>0.05)。見表 1。其中 4 髖(5.3%)位于 Lewinnek安全區以外,71 髖(94.7%)位于 Lewinnek 安全區以內(圖 3)。
)
Table1.
Comparison between preoperative planning and postoperative measuring of acetabular cup (n=75, )
圖3
術后髖臼假體的 Lewinnek 安全區分布圖
Figure3.
Distribution of Lewinnek safety zone of acetabular cup
2.2 臨床療效評價
患者術后均獲隨訪,隨訪時間 6~24 個月,平均 13 個月。術后切口均Ⅰ期愈合。1 例單髖 Crowe Ⅳ型患者出現下肢感覺障礙、無活動受限,維持屈髖、屈膝體位并給予營養神經藥物治療 1 周后癥狀消失。末次隨訪時,髖關節改良 Harris 評分為(85.5±11.2)分,髖關節活動度為 120°(110°,120°),均較術前改善,差異有統計學意義(t=?14.215,P=0.000;Z=?7.380,P=0.000)。術后 3 個月,X 線片測量示雙下肢長度差為 3.8(2.0,8.1)mm,較術前明顯改善(Z=–6.667,P=0.000)。隨訪期間無其他 THA 相關并發癥發生,假體無松動征象,無翻修發生。見圖 4。
圖4
患者,女,30 歲,雙側 Crowe Ⅳ 型 DDH
a. 術前 X 線片;b、c. 術前規劃左髖臼杯位置;d. 術中髖臼注冊;e. 術中髖臼磨銼完成;f. 術中臼杯安裝完成后測定外展角和前傾角;g. 術后 3 d X 線片;h. 術后 1 年假體位置良好,無松動
Figure4. A 30-year-old female patient with bilateral DDHs (Crowe type Ⅳ)a. Preoperative X-ray film; b, c. Planning the position of the left acetabular cup before operation; d. Registering acetabulum during operation; e. Reaming the acetabulum during operation; f. Measuring the inclination angle and anteversion angle after the installation of the acetabular cup; g. X-ray film at 3 days after operation; h. X-ray film at 1 year after operation, showing no sign of loosening
3 討論
3.1 機器人輔助 THA 的準確性
THA 髖臼假體位置不良會導致雙下肢不等長、髖關節脫位、假體磨損等[12]。研究發現術者經驗對髖臼假體安放影響較大,而術者易高估外展角、低估前傾角[13]。機器人輔助 THA 是在機械臂輔助下對髖臼假體放置位置進行定位,可以更準確磨銼髖臼,并實時反饋磨銼深度、角度以及臼壁厚度,指引磨銼方向;同時機械臂可以把控臼杯植入方向,使其與磨銼角度保持一致,減少臼杯植入角度誤差。Lewinnek 等[11]和 Callanan 等[14]根據術后假體穩定性提出了臼杯“安全區”的概念,即外展角 30°~50°、前傾角 5°~25° 區域。Lewinnek 等[11]指出如髖臼杯放置在安全區內,術后關節脫位率僅為 1.5%,而放置于安全區外,關節脫位率達 6.1%。Kanawade 等[15]的研究顯示以 ±5° 誤差為極限值,機器人輔助下臼杯放置的外展精確度為 88%、前傾精確度為 84%。Domb 等[16]報道機器人輔助下臼杯放置在安全區比例明顯高于手動和術中透視下手術。
本組術后測量髖臼前傾角與術前規劃值存在統計學差異,但髖臼外展角以及髖關節旋轉中心位置與術前計劃一致,且 71 髖(94.7%)均位于 Lewinnek 安全區內。我們分析髖臼前傾角術前規劃與術中實際放置存在差異,可能與術前規劃基于 CT 數據測量,而術后基于 X 線片測量,測量結果受攝片體位影響較大有關。
另外,CT 圖像上 DDH 髖臼通常表現為前壁或后壁骨量缺失[17],如偏心磨銼會造成醫源性骨缺損加重,無法保證臼杯初始穩定性。傳統手術與機器人輔助手術的對比研究顯示,機器人輔助下可以采用單次磨銼,更好地保留骨量、控制髖臼磨銼深度。機器人系統設定采用小于術前設計臼杯尺寸 3 mm 或以上的髖臼銼時,術者可以手動操作機械臂在較大范圍內磨銼,磨銼角度(外展角和前傾角)所受限制較小;但髖臼銼逐級增大至僅小于計劃臼杯 2 mm 時,磨銼角度會限制在術前計劃 ±10° 范圍內,有效避免出現較大誤差[18]。由于對髖臼長期穩定的要求,既要滿足覆蓋率又要使用大直徑股骨頭降低脫位風險,很難選擇最佳的髖臼大小[19]。機器人輔助 THA 可以植入比患者自身更小的股骨頭假體,而且不會增加術后脫位風險[20]。本組 75 髖均按術前計劃準確磨銼及安裝髖臼假體,未發生垂直和水平方向上錯位,并基于三維 CT 模板實現了最大髖臼覆蓋,術后隨訪未發現假體松動或脫位。
3.2 機器人輔助手術療效分析
目前,有關髖臼假體位置與 DDH 患者術后髖關節功能關系的研究較少,THA 本身能否改善此類患者髖關節活動度尚存在爭議。本組術后患者髖關節活動度明顯改善,但該改善效果是否與機器人輔助手術相關,需要進一步前瞻性對比研究。
雙下肢不等長是 THA 術后并發癥之一,在 DDH 患者中更明顯。雖然股骨柄的選擇是髖關節偏心距、下肢長度恢復的主要影響因素,但髖臼假體任一平面的細微變化都可能對整個髖關節結構產生影響[21]。El Bitar 等[22]報道機器人輔助手術在預測術后雙下肢長度差方面有明顯優勢,本組術后雙下肢長度差與術前比較有明顯改善。也有研究指出機器人輔助 THA 術后雙下肢長度差的改善可能與股骨垂直偏心距的恢復有關[23],因此有待進一步研究細化髖臼側和股骨側對下肢長度恢復的影響。
關于機器人輔助手術在改善臨床療效方面的有效性仍存在爭議。Honl 等[24]報道,與對照組相比,機器人輔助手術組術后可獲得更高的 Harris 評分。然而 Bargar 等[25]研究顯示機器人輔助組在 Harris 評分或簡明健康調查量表(SF-36 量表)方面無明顯優勢。也有研究認為對于經驗豐富的骨科醫生,使用機器人輔助手術系統不僅不能獲得更理想的手術效果,還存在安裝成本、額外輻射暴露、配套假體類型單一等局限性[26]。我們前期研究證實了機器人輔助技術用于治療股骨頭壞死的有效性,具有臼杯放置準確度提高、手術時間和術后住院時間縮短等優點[8, 27]。Perets 等[28]的臨床隨訪顯示機器人輔助 THA 并發癥發生率及翻修率與傳統手術相似。本組術后均未出現 THA 相關的并發癥,可能與手術例數較少、隨訪時間短有關,需要長期隨訪及對照研究。
3.3 機器人輔助手術存在問題
我們在臨床應用過程中發現機器人輔助 THA 存在一些局限性,包括:① 對術前三維 CT 檢查的窗位、層厚、患者體位、掃描范圍均有特殊要求,常出現無效影像。② DDH 術中注冊需要在真臼或較好骨質上完成,避免在骨贅、軟組織上進行注冊。③ 機器人系統測量的雙下肢長度差為髖關節局部長度差,并不能完全反映真實下肢長度。④ 與機器人配套的假體類型單一,沒有多孔臼杯,只能與高交聯聚乙烯內襯相匹配,在 Crowe Ⅳ型 DDH 中臼杯使用受限;且股骨側沒有組配式假體,也在一定程度上限制了其應用。⑤ 植入骨盆陣列需要作額外切口和增加軟組織損傷,可能發生固定釘切口滲血、感染等并發癥,對于有髖臼截骨術手術史患者因髂前上棘缺失存在固定困難問題。
綜上述,機器人輔助 THA 治療 DDH 可提高髖臼磨銼及假體植入準確性,獲得較好早期療效。但本研究為回顧性研究,病例數較少,隨訪時間較短,缺少對照,同時由于早期應用多選擇相對簡單病例,手術由多名術者完成,術者經驗可能會使研究結果產生偏差,因此本研究結論及遠期療效均有待進一步明確。
作者貢獻:許固軍參與實驗設計及實施、起草文章;張帥、劉宇博參與實驗實施、數據收集;許固軍、馬明陽參與數據整理與分析;孔祥朋、柴偉負責實驗設計、文章審閱與修改。
利益沖突:所有作者聲明,在課題研究和文章撰寫過程中不存在利益沖突。項目經費支持沒有影響文章觀點和對研究數據客觀結果的統計分析及其報道。
機構倫理問題:研究方案經解放軍總醫院醫學倫理委員會批準(倫審第 S2018-014-01 號)。