引用本文: 袁銘成, 石小軍, 蘇強, 萬旭峰, 周宗科. 國產機器人輔助人工全膝關節置換術近期療效的前瞻性隨機對照研究. 中國修復重建外科雜志, 2021, 35(10): 1251-1258. doi: 10.7507/1002-1892.202106047 復制
版權信息: ?四川大學華西醫院華西期刊社《中國修復重建外科雜志》版權所有,未經授權不得轉載、改編
骨關節炎是老年人群常見關節疾病之一,人工全膝關節置換術(total knee arthroplasty,TKA)是目前治療終末期膝關節骨關節炎的主要術式。雖然,近年來膝關節假體設計、手術器械和技術均逐步優化,術后康復方案也更完善,但傳統 TKA 術后患者不滿意率仍達 10%~20%,療效欠佳主要與手術計劃誤差、假體位置不良、下肢力線恢復不準確等因素相關[1]。
隨著醫學技術的發展,精準醫療、智能骨科等概念逐漸進入骨科領域,手術機器人的出現使骨科手術操作“標準化”且更精準、微創。近年來,機器人輔助 TKA(robot-assisted TKA,RATKA)的報道逐漸增加,術中截骨及假體放置準確性顯著提高,還可以根據系統顯示的實時三維圖像調整假體對位、對線以及軟組織張力平衡。2019 年,我國自主研發的骨圣元化全膝關節置換手術輔助系統(YUANHUA-TKA;深圳骨圣元化機器人有限公司)問世,該系統為半主動操作型機器人,包括導航儀、機械臂車以及主控臺車三部分。2020 年 10 月,我院應用 YUANHUA-TKA 系統成功完成首例 RATKA。為探討采用該系統行 RATKA 的近期療效,我們進行了一項前瞻性隨機對照試驗。報告如下。
1 臨床資料
1.1 患者選擇標準
納入標準:① 年齡 18~80 歲;② 確診為終末期膝關節骨關節炎,Kellgren-Lawrence 分級為Ⅳ級;③ 經正規保守治療 1 年以上無效;④ 受試者充分了解本試驗受益和風險,能接受 RATKA 治療方案,愿意參與并簽署知情同意書。排除標準:① 膝關節嚴重外翻畸形(Krackow Ⅲ型);② 合并膝關節周圍神經系統病變;③ 合并膝關節活動性感染;④ 有膝關節開放手術史;⑤ 膝關節嚴重不穩定,不能采用韌帶保留型假體置換。
以 2020 年 10 月—12 月擬接受初次單側 TKA 的患者作為研究對象,根據隨機數字表法分為傳統 TKA 組和 RATKA 組。63 例患者符合選擇標準納入研究,其中 3 例主動退出試驗,最終納入 60 例進行分析;其中 RATKA 組 28 例,傳統 TKA 組 32 例。
1.2 一般資料
傳統 TKA 組:男 4 例,女 28 例;年齡 49~77 歲,平均 65.4 歲。身體質量指數(body mass index,BMI)為(28.4±3.6)kg/m2。美國麻醉醫師協會(ASA)分級:Ⅰ級 16 例、Ⅱ級 12 例、Ⅲ級 4 例。骨關節炎病程 5~9 年,平均 6.4 年。左膝 12 例,右膝 20 例。3 例對側既往行 TKA。
RATKA 組:男 9 例,女 19 例;年齡 56~78 歲,平均 65.2 歲。BMI 為(27.4±3.0)kg/m2。ASA 分級:Ⅰ級 15 例、Ⅱ級 13 例。骨關節炎病程 5~9 年,平均 6.7 年。左膝 17 例,右膝 11 例。2 例對側既往行 TKA。
兩組患者性別、年齡、BMI、ASA 分級、骨關節炎病程、手術側別,以及術前膝關節疼痛視覺模擬評分(VAS)靜息及運動評分、關節活動度(range of motion,ROM)、膝關節學會評分系統(KSS)評分、美國西部 Ontario 與 McMaster 大學骨關節炎指數(WOMAC)疼痛、僵硬、功能評分及髖-膝-踝角(hip-knee-ankle angle,HKA)偏移等一般資料比較,差異均無統計學意義(P>0.05),具有可比性。見表 1~4。
 )
Table1.
Comparison of the VAS score between the two groups before and after operation (
)
Table1.
Comparison of the VAS score between the two groups before and after operation ( )
)
 )
Table2.
Comparison of the ROM and KSS score between the two groups before and after operation (
)
Table2.
Comparison of the ROM and KSS score between the two groups before and after operation ( )
)
 )
Table3.
Comparison of the WOMAC score between the two groups before and after operation (
)
Table3.
Comparison of the WOMAC score between the two groups before and after operation ( )
)
 ,°)
Table4.
Comparison of the lower limb alignment and prosthesis position between the two groups (
,°)
Table4.
Comparison of the lower limb alignment and prosthesis position between the two groups ( , °)
, °)
1.3 手術方法
兩組手術均由同一位醫生計劃并主刀完成。全麻下取膝前正中切口、髕旁內側入路,術中均使用止血帶。兩組均采用固定平臺假體(天津正天醫療器械有限公司)置換。傳統 TKA 組參照常規操作步驟完成手術[2]。
RATKA 組首先基于患者術前 CT 圖像選定解剖標志點,將 CT 數據輸入手術規劃軟件 YUANHUA-TKA-Plan V1.0;軟件根據 CT 數據及解剖標志點和預估截骨量,自動規劃截骨方案和假體型號及位置(圖 1)。
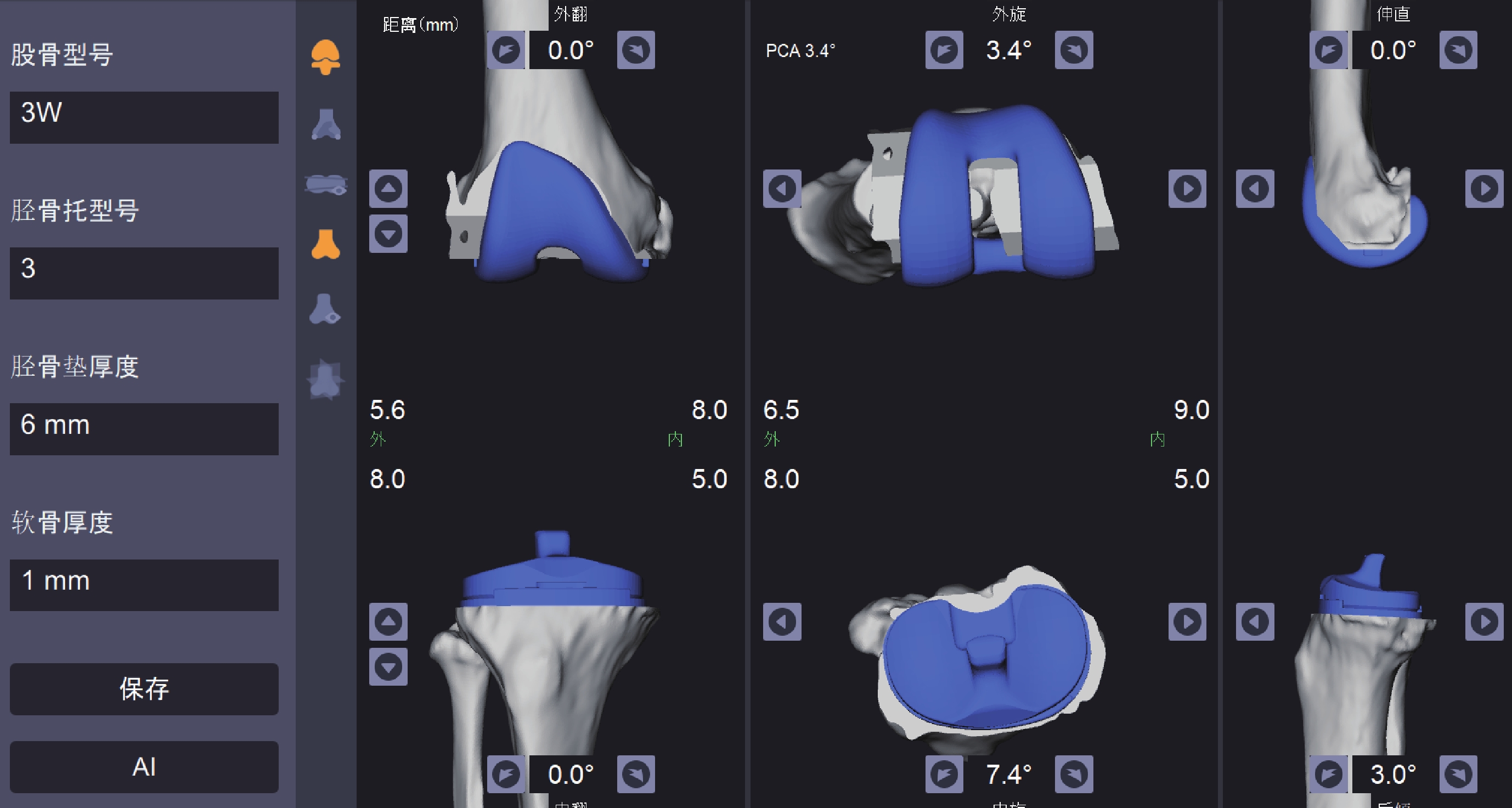 圖1
手術規劃軟件設計截骨方案
Figure1.
Osteotomy plan was designed based on the surgical planning software
圖1
手術規劃軟件設計截骨方案
Figure1.
Osteotomy plan was designed based on the surgical planning software
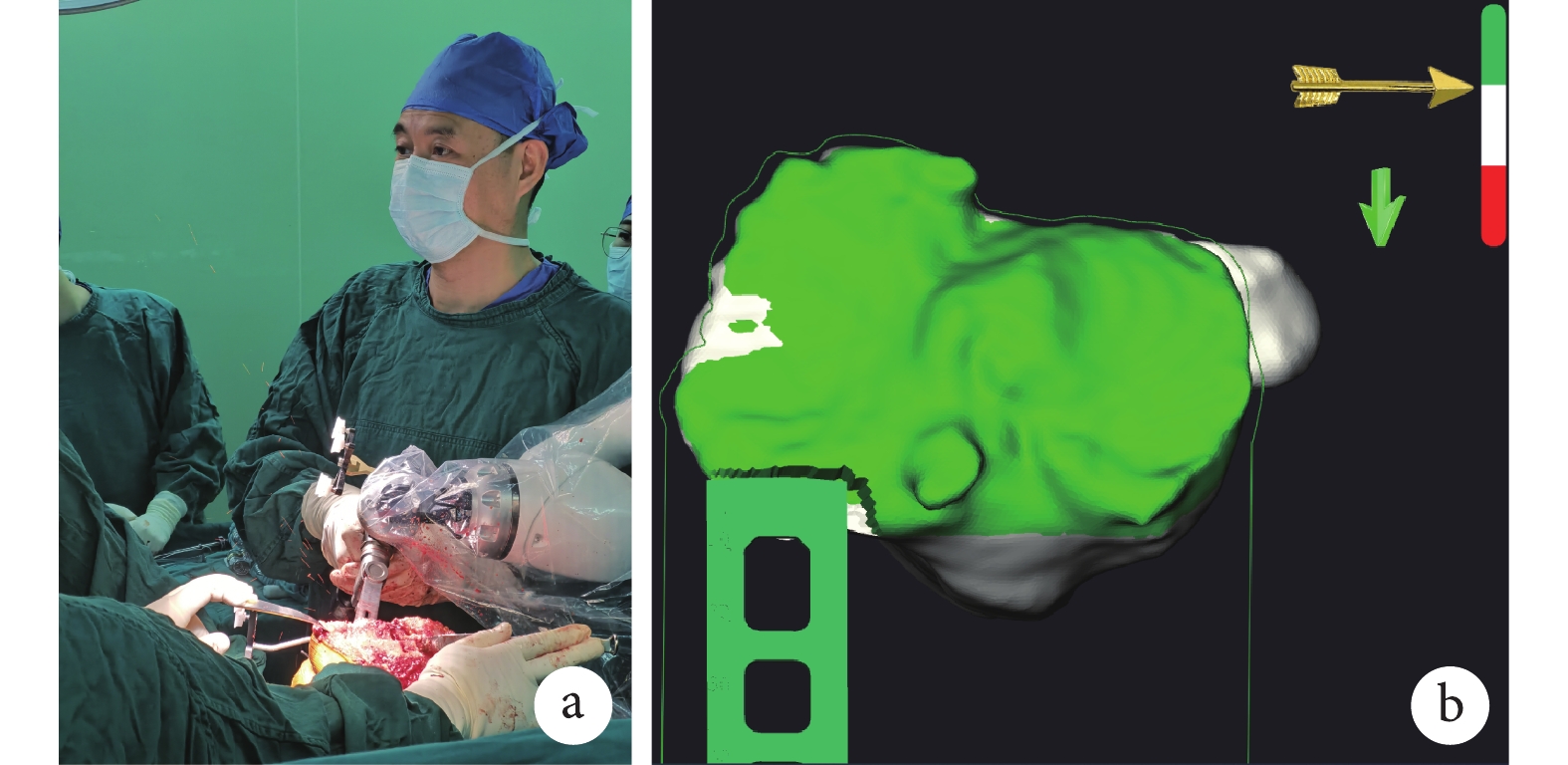
然后,依次切開皮膚和皮下組織,充分顯露股骨遠端、前髁及脛骨平臺。分別在距切口下緣下方和切口上緣上方約 10 cm 處,各植入 1 枚示蹤器固定釘,安裝固定股骨和脛骨示蹤器,用于股骨和脛骨術中跟蹤。為保證截骨過程中示蹤器穩定,固定釘需穿透 2 層皮質骨。完全顯露切口(顯露脛骨結節,前髁暴露區域盡量大),在股骨和脛骨截骨區域外分別植入股骨和脛骨檢查釘。隨后按操作指南依次對股骨和脛骨進行注冊配準,配準完成后系統進入“術中規劃模塊”。該模塊可實時顯示股骨和脛骨相對位置以及截骨屈曲和伸直間隙,術者可根據患者膝關節軟組織張力情況對截骨參數進行確認及調整。截骨過程中,系統會自動調整機械臂末端擺鋸位置和角度,使截骨鋸片與當前截骨平面對齊,并限定術者在當前平面內完成截骨操作。為保證截骨精度以及保護側副韌帶、血管等重要組織,YUANHUA-TKA 系統設定了安全限制,當系統檢測到截骨量超過規劃截骨量 0.5 mm 或鋸片尖端觸碰到當前截骨安全邊界時,擺鋸會自動斷電,無法繼續截骨。此時,術者需微調擺鋸,使之回到安全范圍內后繼續截骨操作(圖 2)。截骨完成后,安裝假體試模,確認無誤后安裝假體并縫合切口,拆除股骨和脛骨示蹤器及固定釘。
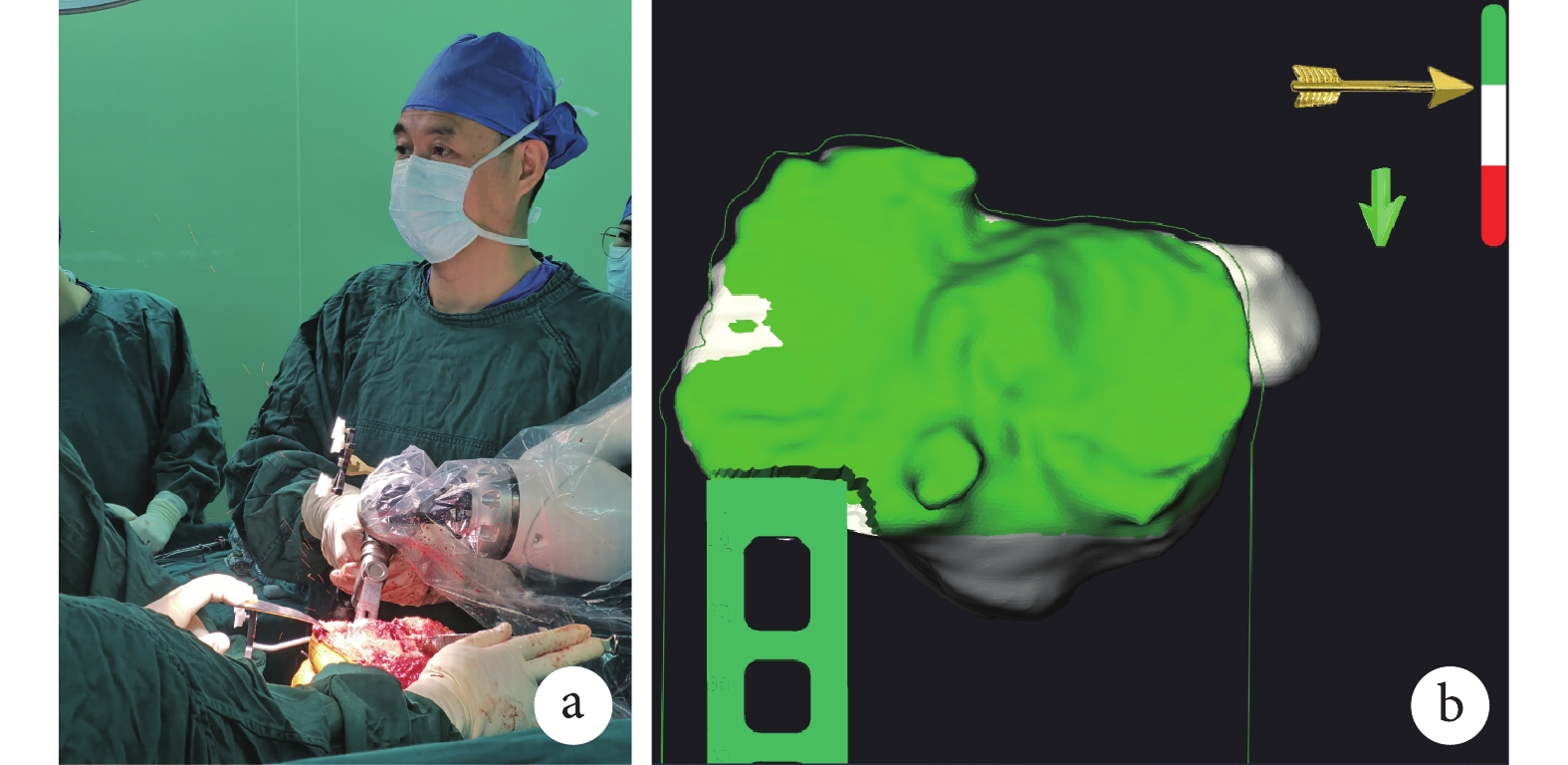 圖2
YUANHUA-TKA 系統輔助下截骨
圖2
YUANHUA-TKA 系統輔助下截骨
a. 導航截骨;b. 主控臺手術軟件界面 綠色部分示安全截骨范圍
Figure2. Osteotomy assisted by the YUANHUA-TKA systema. Osteotomy assisted by the navigation system; b. The screen during osteotomy Green boundary around the model indicated the safety range of resection
1.4 圍術期管理方法
兩組圍術期管理措施一致,參照《中國髖、膝關節置換術加速康復——圍術期管理策略專家共識》[3]予以抗感染、鎮痛、冰敷消腫、抗凝治療。根據切口愈合情況,鼓勵患者盡早扶助行器下地活動。
1.5 療效評價指標
1.5.1 臨床療效評價指標
記錄兩組手術時間、術中出血量;采用膝關節 ROM,KSS 評分,WOMAC 疼痛、僵硬、功能評分,VAS 靜息及運動評分,評價膝關節功能及疼痛情況;術后 3 個月采用膝關節三維運動分析系統行步態分析(屈伸角)。
1.5.2 影像學評價指標
攝膝關節正側位以及站立位雙下肢全長 X 線片,測量以下指標:① 于術前及術后 3 個月雙下肢全長 X 線片測量 HKA,計算其與理想值(180°)的差值,并取絕對值作為 HKA 偏移程度,評價下肢力線恢復情況;② 于術后 3 個月膝關節正側位 X 線片測量脛骨平臺后傾角(lateral tibia component,LTC)、冠狀面股骨組件角(frontal femoral component,FFC)、冠狀面脛骨組件角(frontal tibia component,FTC)、矢狀面股骨組件角(lateral femoral component,LFC),評價假體位置。
1.6 統計學方法
采用 SPSS23.0 統計軟件進行分析。本研究計量資料均符合正態分布,以均數±標準差表示,組內手術前后比較采用配對 t 檢驗,組間比較采用獨立樣本 t 檢驗。檢驗水準 α=0.05。
2 結果
兩組手術均順利完成;術后切口均Ⅰ期愈合,無手術相關并發癥發生。RATKA 組手術時間為(108.7±17.3)min,較傳統 TKA 組(95.4±11.2)min 延長,差異有統計學意義(t=12.253,P=0.001);術中出血量為(272.8±57.1)mL,與傳統 TKA 組的(246.2±52.4)mL 比較,差異無統計學意義(t=3.382,P=0.071)。
兩組患者均獲隨訪 3 個月。術后 3 個月,兩組膝關節 VAS 靜息及運動評分、ROM、KSS 評分以及 WOMAC 疼痛、僵硬、功能評分均較術前改善,差異有統計學意義(P<0.05);上述指標手術前后差值組間比較,差異均無統計學意義(P>0.05)。見表 1~3。術后 3 個月步態分析 RATKA 組患者屈伸角為(46.21±9.66)°,較傳統 TKA 組(38.41±10.94)° 增大,差異有統計學意義(t=9.469,P=0.003)。
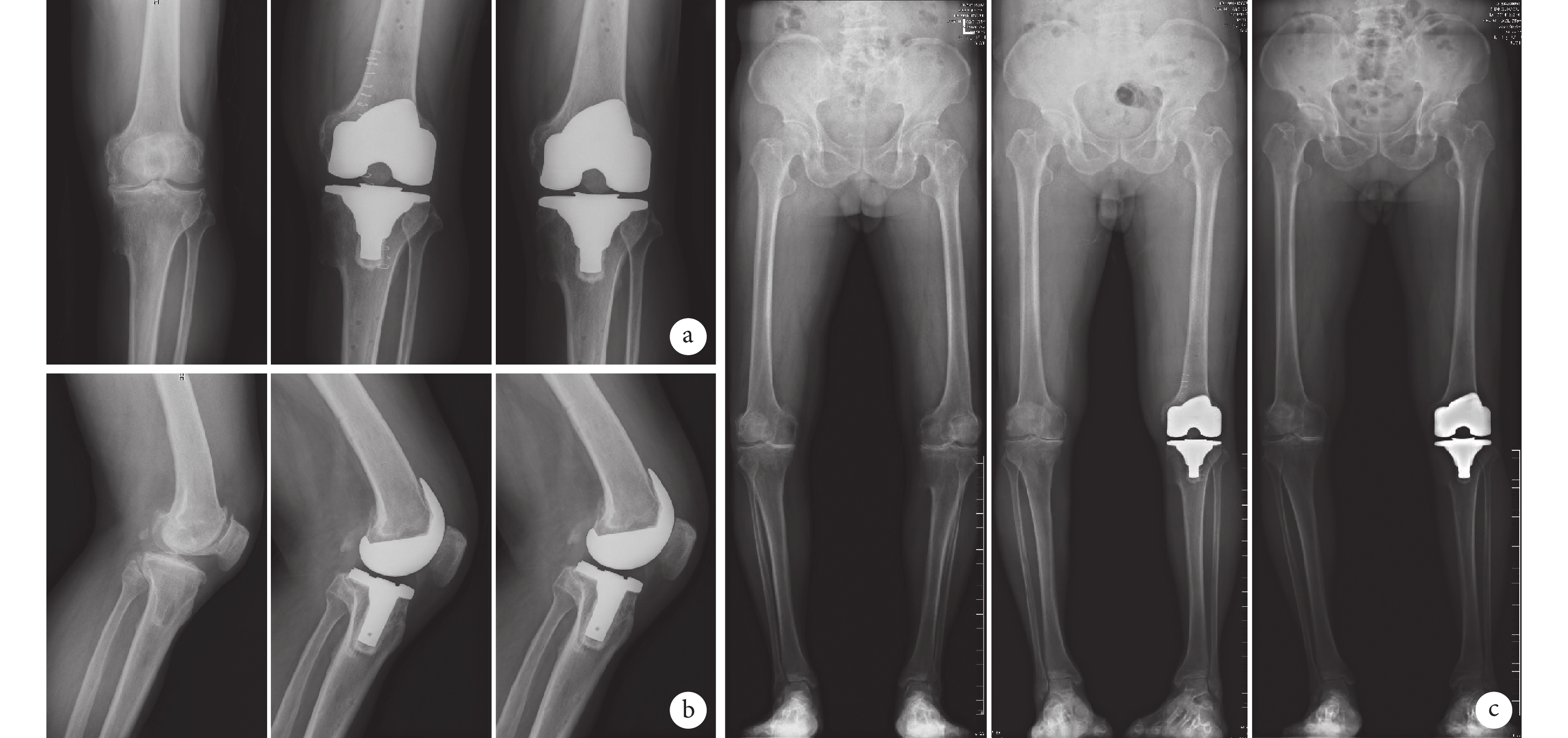
術后 3 個月 X 線片復查示兩組假體位置良好,無假體松動、下沉等不良事件發生(圖 3)。兩組 HKA 偏移手術前后比較差異均有統計學意義(P<0.05),HKA 偏移手術前后差值組間比較差異無統計學意義(t=1.254,P=0.267)。術后 3 個月,兩組 FFC、FTC、LFC 差異均無統計學意義(P>0.05);RATKA 組 LTC 小于傳統 TKA 組,差異有統計學意義(t=17.819,P=0.000),且更接近理想值 3°[2]。見表 4。
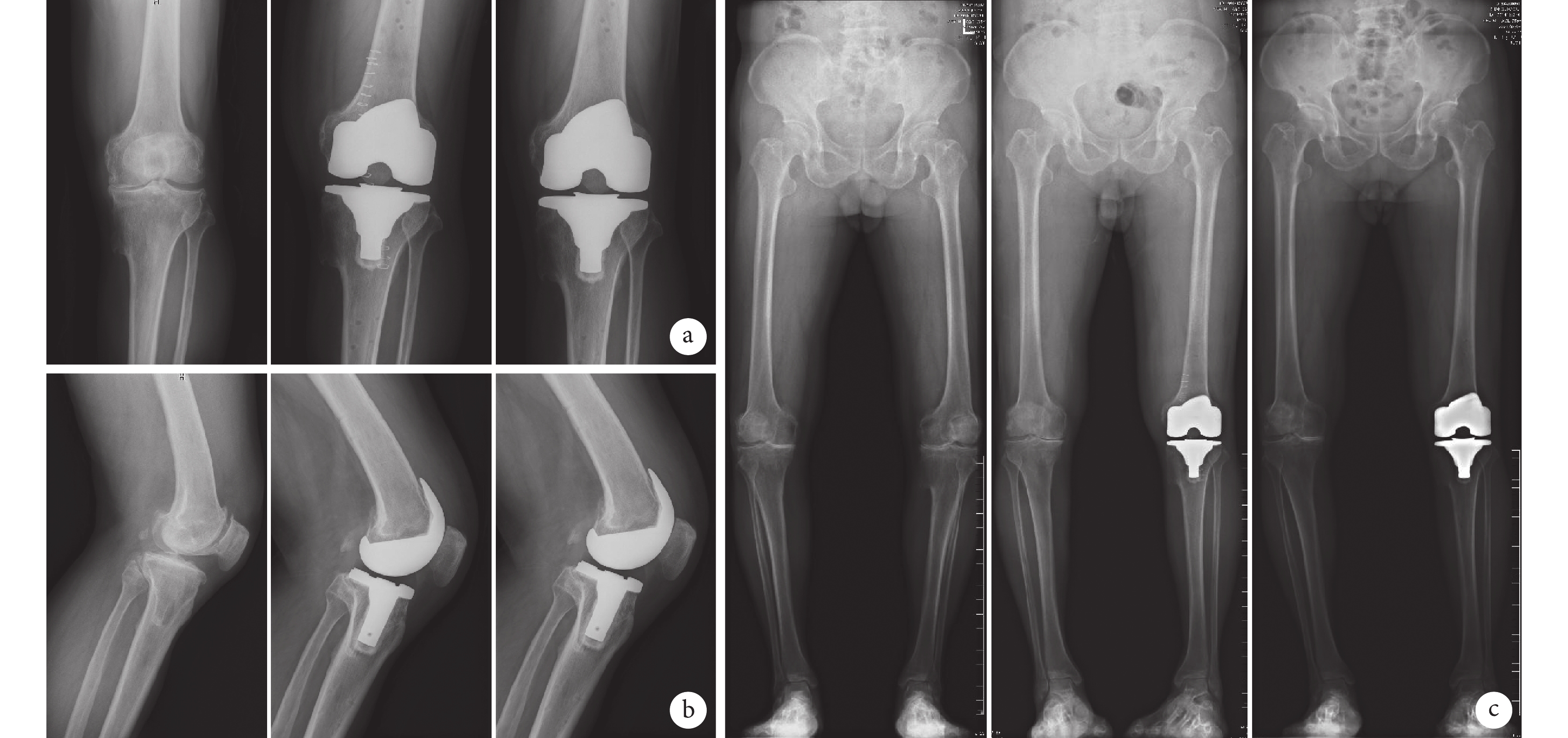 圖3
RATKA 組患者,男,65 歲,左膝關節骨關節炎 X 線片
圖3
RATKA 組患者,男,65 歲,左膝關節骨關節炎 X 線片
從左至右分別為術前及術后 3 d、3 個月 a. 正位片;b. 側位片;c. 雙下肢全長片示下肢力線恢復中立位
Figure3. X-ray films of a 65-year-old male patient with osteoarthritis of left knee in RATKA groupFrom left to right for preoperative and3 days, 3 months after operation a. Anteroposterior images; b. Lateral images; c. Full-length of lower limbs images showed that the lower limb alignment had returned to a neutral position
3 討論
3.1 RATKA 術中常用機器人系統比較
目前,國內外使用較廣泛、技術較成熟的手術機器人是美國 Stryker 公司 Mako 系統。我們應用的國產 YUANHUA-TKA 系統,其基本原理、組成構造及使用流程與 Mako 系統類似。二者均為半主動操作型手術機器人,術前均需要患者 CT 圖像作為注冊參考信息;機器人操作前需將固定基準點位置的夾鉗連接在股骨與脛骨上,從而實現坐標系注冊配準;機器人機械臂末端擺鋸均受術者控制,交互式機械臂通過震動與警示音輔助術者在規劃區域范圍內截骨,安全性好。二者區別在于截骨方法不同,Mako 系統采用間隙平衡法截骨,傳感器顯示了膝關節屈伸過程中內、外側壓力大小與集中點,術中可以根據軟組織的平衡來調整術前下肢力線的規劃,保證軟組織平衡以及獲得理想下肢力線。而 YUANHUA-TKA 系統是采用測量截骨法截骨,術前根據 CT 圖像確定股骨頭中心、膝關節中心、內外踝位點等解剖位點,并生成截骨方案,術中按照該方案進行截骨,不再對術前下肢力線的規劃進行調整。本研究結果顯示與傳統 TKA 組相比,基于 YUANHUA-TKA 系統的 RATKA 組術后假體位置及下肢力線均較理想。但是與 Mako 系統相比假體位置與下肢力線恢復程度是否存在差異,有待進一步比較研究。與 Mako 系統相比,YUANHUA-TKA 系統主要有以下優勢:① 手術費用及維護費用較低;② Mako 系統為美國 Stryker 公司生產,術前規劃及數據需傳至國外處理,不僅繁瑣費時,還存在數據流失風險。
目前,國內研發的膝關節置換手術輔助系統除 YUANHUA-TKA 外,還有“鴻鵠”機器人系統(蘇州微創暢行機器人有限公司)。該系統與 YUANHUA-TKA 系統的區別在于其機械臂末端模塊不是擺鋸,是可以根據設定參數進行平移和任意角度旋轉的截骨導板,雖然這樣也能保證截骨精準性,但由于該系統擺鋸為術者手持,幅度范圍不受機械臂控制,因此無法將擺鋸操作限制在安全區域內。而 YUANHUA-TKA 系統通過震動與警示音輔助術者操作,限定在規劃區域內截骨的交互式機械臂安全性更高。
3.2 RATKA 療效分析
手術機器人通過整合計算機導航、可視化屏幕、機械臂等設備,在術中通過精確計算,根據實際情況確定假體覆蓋部分的截骨厚度、股骨遠端外翻截骨角度、股骨后髁外旋截骨角度、LTC 及站立位下肢力線情況,進而得到較好的下肢力線結果。Marchand 等[4]測量了 330 例接受 RATKA 的骨關節炎患者手術前后冠狀位下肢力線,64% 患者術前下肢力線存在超過 3° 的內翻畸形,11% 患者存在超過 3° 的外翻畸形;但所有患者術后下肢力線均糾正至中立位(±2°)。Kort 等[5]的 Meta 分析也得出 RATKA 能獲得更為準確的 HKA、FFC 以及 FTC。本研究兩組患者術后 FFC、FTC 以及 LFC 差異無統計學意義,但 RATKA 組患者 LTC 優于傳統 TKA 組,提示 RATKA 在調整下肢力線與假體安放位置方面具有一定優勢。
一項納入 80 例患者的前瞻性對照研究顯示,術后 1 個月時與傳統 TKA 相比,RATKA 組患者疼痛更輕,鎮痛藥物使用更少,血紅蛋白回升更快,能夠更早地完成直腿抬高動作[6]。Marchand 等[7] 術后 6 個月隨訪結果顯示,與傳統 TKA 組患者相比,RATKA 組患者術后疼痛更輕、滿意度更高。本研究中,兩組患者術后 3 個月膝關節疼痛 VAS 評分差值差異均無統計學意義,且評分均相對較低,這可能與本中心完善的圍術期疼痛管理有關。Liow 等[8]對 31 例接受 RATKA 和 29 例接受傳統 TKA 的患者進行簡明健康調查量表(SF-36 量表)評分,結果顯示術后 RATKA 組患者在情感評分和活力評分方面表現更佳。之后,該團隊另一項納入 60 例患者的前瞻性隨機對照研究顯示,傳統 TKA 組與 RATKA 組術后 6 個月、2 年的 KSS 評分及 ROM 差異均無統計學意義,但 RATKA 組 SF-36 量表評分更高[9]。此外,研究發現 RATKA 可以顯著改善患者術后 KSS 和 WOMAC 評分[10-11],但手術時間延長了 21.5 min[11]和 24.3 min[12]。與傳統 TKA 相比,RATKA 早中期 KSS 評分明顯更高[13]。
3.3 RATKA 對軟組織的保護
RATKA 具有更好的軟組織保護作用,術中截骨量和截骨范圍已根據術前計劃在系統中預先設定,縮小了操作空間。膝關節周圍軟組織均在設定操作區域之外,因此 RATKA 術中損傷后交叉韌帶及其止點、內外側副韌帶風險大大降低。此外,RATKA 無需進行脛骨前脫位和向外側翻轉髕骨的處理,降低了髕腱、股四頭肌腱和腘窩周圍軟組織的損傷,但這是否會減輕術后膝關節軟組織腫脹還需進一步探究。
一項尸體標本研究比較了 RATKA 和傳統 TKA 術中保護軟組織方面的差異[14],結果顯示 RATKA 可以更好地保護內、外側副韌帶,完整保留后交叉韌帶脛骨側止點,而傳統手術的 6 具標本中 2 具后交叉韌帶脛骨側止點被手術器械損傷,甚至離斷。但該結論是基于尸體標本研究,具有一定局限性。
3.4 手術操作要點
采用 YUANHUA-TKA 系統行 RATKA 手術操作要點:① 股骨和脛骨示蹤器固定釘需距離切口約 10 cm 植入,切口應完全顯露脛骨結節,前髁暴露區域盡量大;② 植入股骨和脛骨檢查釘時需避開截骨區域,其中股骨檢查釘頭部錐孔朝向股骨遠端;③ 因檢查釘為楔形,植入時以及植入后不可人為旋轉,否則容易發生松動;④ 點配準、面配準、獲取檢查點時,探針需扎透軟骨,不可扎入骨內,盡量恰好至骨面;⑤ 引導點僅作為采點區域參考,面配準點盡可能分散;⑥ 檢查伸直和屈曲間隙,再次確認股骨和脛骨截骨量,此步操作前應先去除骨贅,以防骨贅遮擋活動。如果患肢無法伸直,可先在后髁少量截骨。
在實際操作中,我們發現一個潛在的可能導致醫源性軟組織損傷的風險。若患者膝關節周圍骨贅較多,尤其是內、外副韌帶周圍增生骨贅需格外注意。在術前點、面配準時,為了提高配準精確度,暴露關節面時會清除嚴重影響患者膝關節屈伸的較大骨贅,而骨贅清除后其部位可能被其他軟組織充填,如韌帶等結構,但機器人系統基于術前計劃認為此處仍為多余骨贅需切除,因此術中可能出現截骨已達軟組織結構,但系統仍顯示操作在安全區域內的情況。為了規避該風險,除了術中術者小心操作外,對于骨贅較多的患者應在術前計劃階段將擺鋸操作安全范圍(截骨導板設置的安全范圍)設定值適當縮小,若無法完全鋸斷骨質可以手動修整,以保證原有骨贅周圍軟組織的安全。
綜上述,采用 YUANHUA-TKA 系統行 RATKA 能夠提高截骨準確度,使假體安放位置、角度以及下肢力線準確度大大提高,獲得較好近期療效,遠期療效有待進一步隨訪觀察。
作者貢獻:石小軍、蘇強、萬旭峰、周宗科負責試驗設計;袁銘成負責文章撰寫以及數據收集整理、統計分析。
利益沖突:所有作者聲明,在課題研究和文章撰寫過程中不存在利益沖突。
機構倫理問題:研究方案經四川大學華西醫院臨床試驗倫理審查委員會批準(HX-202014)。中國臨床試驗中心注冊號:ChiCTR2000031282。患者均簽署知情同意書。
骨關節炎是老年人群常見關節疾病之一,人工全膝關節置換術(total knee arthroplasty,TKA)是目前治療終末期膝關節骨關節炎的主要術式。雖然,近年來膝關節假體設計、手術器械和技術均逐步優化,術后康復方案也更完善,但傳統 TKA 術后患者不滿意率仍達 10%~20%,療效欠佳主要與手術計劃誤差、假體位置不良、下肢力線恢復不準確等因素相關[1]。
隨著醫學技術的發展,精準醫療、智能骨科等概念逐漸進入骨科領域,手術機器人的出現使骨科手術操作“標準化”且更精準、微創。近年來,機器人輔助 TKA(robot-assisted TKA,RATKA)的報道逐漸增加,術中截骨及假體放置準確性顯著提高,還可以根據系統顯示的實時三維圖像調整假體對位、對線以及軟組織張力平衡。2019 年,我國自主研發的骨圣元化全膝關節置換手術輔助系統(YUANHUA-TKA;深圳骨圣元化機器人有限公司)問世,該系統為半主動操作型機器人,包括導航儀、機械臂車以及主控臺車三部分。2020 年 10 月,我院應用 YUANHUA-TKA 系統成功完成首例 RATKA。為探討采用該系統行 RATKA 的近期療效,我們進行了一項前瞻性隨機對照試驗。報告如下。
1 臨床資料
1.1 患者選擇標準
納入標準:① 年齡 18~80 歲;② 確診為終末期膝關節骨關節炎,Kellgren-Lawrence 分級為Ⅳ級;③ 經正規保守治療 1 年以上無效;④ 受試者充分了解本試驗受益和風險,能接受 RATKA 治療方案,愿意參與并簽署知情同意書。排除標準:① 膝關節嚴重外翻畸形(Krackow Ⅲ型);② 合并膝關節周圍神經系統病變;③ 合并膝關節活動性感染;④ 有膝關節開放手術史;⑤ 膝關節嚴重不穩定,不能采用韌帶保留型假體置換。
以 2020 年 10 月—12 月擬接受初次單側 TKA 的患者作為研究對象,根據隨機數字表法分為傳統 TKA 組和 RATKA 組。63 例患者符合選擇標準納入研究,其中 3 例主動退出試驗,最終納入 60 例進行分析;其中 RATKA 組 28 例,傳統 TKA 組 32 例。
1.2 一般資料
傳統 TKA 組:男 4 例,女 28 例;年齡 49~77 歲,平均 65.4 歲。身體質量指數(body mass index,BMI)為(28.4±3.6)kg/m2。美國麻醉醫師協會(ASA)分級:Ⅰ級 16 例、Ⅱ級 12 例、Ⅲ級 4 例。骨關節炎病程 5~9 年,平均 6.4 年。左膝 12 例,右膝 20 例。3 例對側既往行 TKA。
RATKA 組:男 9 例,女 19 例;年齡 56~78 歲,平均 65.2 歲。BMI 為(27.4±3.0)kg/m2。ASA 分級:Ⅰ級 15 例、Ⅱ級 13 例。骨關節炎病程 5~9 年,平均 6.7 年。左膝 17 例,右膝 11 例。2 例對側既往行 TKA。
兩組患者性別、年齡、BMI、ASA 分級、骨關節炎病程、手術側別,以及術前膝關節疼痛視覺模擬評分(VAS)靜息及運動評分、關節活動度(range of motion,ROM)、膝關節學會評分系統(KSS)評分、美國西部 Ontario 與 McMaster 大學骨關節炎指數(WOMAC)疼痛、僵硬、功能評分及髖-膝-踝角(hip-knee-ankle angle,HKA)偏移等一般資料比較,差異均無統計學意義(P>0.05),具有可比性。見表 1~4。
)
Table1.
Comparison of the VAS score between the two groups before and after operation ()
)
Table2.
Comparison of the ROM and KSS score between the two groups before and after operation ()
)
Table3.
Comparison of the WOMAC score between the two groups before and after operation ()
,°)
Table4.
Comparison of the lower limb alignment and prosthesis position between the two groups (, °)
1.3 手術方法
兩組手術均由同一位醫生計劃并主刀完成。全麻下取膝前正中切口、髕旁內側入路,術中均使用止血帶。兩組均采用固定平臺假體(天津正天醫療器械有限公司)置換。傳統 TKA 組參照常規操作步驟完成手術[2]。
RATKA 組首先基于患者術前 CT 圖像選定解剖標志點,將 CT 數據輸入手術規劃軟件 YUANHUA-TKA-Plan V1.0;軟件根據 CT 數據及解剖標志點和預估截骨量,自動規劃截骨方案和假體型號及位置(圖 1)。
圖1
手術規劃軟件設計截骨方案
Figure1.
Osteotomy plan was designed based on the surgical planning software
然后,依次切開皮膚和皮下組織,充分顯露股骨遠端、前髁及脛骨平臺。分別在距切口下緣下方和切口上緣上方約 10 cm 處,各植入 1 枚示蹤器固定釘,安裝固定股骨和脛骨示蹤器,用于股骨和脛骨術中跟蹤。為保證截骨過程中示蹤器穩定,固定釘需穿透 2 層皮質骨。完全顯露切口(顯露脛骨結節,前髁暴露區域盡量大),在股骨和脛骨截骨區域外分別植入股骨和脛骨檢查釘。隨后按操作指南依次對股骨和脛骨進行注冊配準,配準完成后系統進入“術中規劃模塊”。該模塊可實時顯示股骨和脛骨相對位置以及截骨屈曲和伸直間隙,術者可根據患者膝關節軟組織張力情況對截骨參數進行確認及調整。截骨過程中,系統會自動調整機械臂末端擺鋸位置和角度,使截骨鋸片與當前截骨平面對齊,并限定術者在當前平面內完成截骨操作。為保證截骨精度以及保護側副韌帶、血管等重要組織,YUANHUA-TKA 系統設定了安全限制,當系統檢測到截骨量超過規劃截骨量 0.5 mm 或鋸片尖端觸碰到當前截骨安全邊界時,擺鋸會自動斷電,無法繼續截骨。此時,術者需微調擺鋸,使之回到安全范圍內后繼續截骨操作(圖 2)。截骨完成后,安裝假體試模,確認無誤后安裝假體并縫合切口,拆除股骨和脛骨示蹤器及固定釘。
圖2
YUANHUA-TKA 系統輔助下截骨
a. 導航截骨;b. 主控臺手術軟件界面 綠色部分示安全截骨范圍
Figure2. Osteotomy assisted by the YUANHUA-TKA systema. Osteotomy assisted by the navigation system; b. The screen during osteotomy Green boundary around the model indicated the safety range of resection
1.4 圍術期管理方法
兩組圍術期管理措施一致,參照《中國髖、膝關節置換術加速康復——圍術期管理策略專家共識》[3]予以抗感染、鎮痛、冰敷消腫、抗凝治療。根據切口愈合情況,鼓勵患者盡早扶助行器下地活動。
1.5 療效評價指標
1.5.1 臨床療效評價指標
記錄兩組手術時間、術中出血量;采用膝關節 ROM,KSS 評分,WOMAC 疼痛、僵硬、功能評分,VAS 靜息及運動評分,評價膝關節功能及疼痛情況;術后 3 個月采用膝關節三維運動分析系統行步態分析(屈伸角)。
1.5.2 影像學評價指標
攝膝關節正側位以及站立位雙下肢全長 X 線片,測量以下指標:① 于術前及術后 3 個月雙下肢全長 X 線片測量 HKA,計算其與理想值(180°)的差值,并取絕對值作為 HKA 偏移程度,評價下肢力線恢復情況;② 于術后 3 個月膝關節正側位 X 線片測量脛骨平臺后傾角(lateral tibia component,LTC)、冠狀面股骨組件角(frontal femoral component,FFC)、冠狀面脛骨組件角(frontal tibia component,FTC)、矢狀面股骨組件角(lateral femoral component,LFC),評價假體位置。
1.6 統計學方法
采用 SPSS23.0 統計軟件進行分析。本研究計量資料均符合正態分布,以均數±標準差表示,組內手術前后比較采用配對 t 檢驗,組間比較采用獨立樣本 t 檢驗。檢驗水準 α=0.05。
2 結果
兩組手術均順利完成;術后切口均Ⅰ期愈合,無手術相關并發癥發生。RATKA 組手術時間為(108.7±17.3)min,較傳統 TKA 組(95.4±11.2)min 延長,差異有統計學意義(t=12.253,P=0.001);術中出血量為(272.8±57.1)mL,與傳統 TKA 組的(246.2±52.4)mL 比較,差異無統計學意義(t=3.382,P=0.071)。
兩組患者均獲隨訪 3 個月。術后 3 個月,兩組膝關節 VAS 靜息及運動評分、ROM、KSS 評分以及 WOMAC 疼痛、僵硬、功能評分均較術前改善,差異有統計學意義(P<0.05);上述指標手術前后差值組間比較,差異均無統計學意義(P>0.05)。見表 1~3。術后 3 個月步態分析 RATKA 組患者屈伸角為(46.21±9.66)°,較傳統 TKA 組(38.41±10.94)° 增大,差異有統計學意義(t=9.469,P=0.003)。
術后 3 個月 X 線片復查示兩組假體位置良好,無假體松動、下沉等不良事件發生(圖 3)。兩組 HKA 偏移手術前后比較差異均有統計學意義(P<0.05),HKA 偏移手術前后差值組間比較差異無統計學意義(t=1.254,P=0.267)。術后 3 個月,兩組 FFC、FTC、LFC 差異均無統計學意義(P>0.05);RATKA 組 LTC 小于傳統 TKA 組,差異有統計學意義(t=17.819,P=0.000),且更接近理想值 3°[2]。見表 4。
圖3
RATKA 組患者,男,65 歲,左膝關節骨關節炎 X 線片
從左至右分別為術前及術后 3 d、3 個月 a. 正位片;b. 側位片;c. 雙下肢全長片示下肢力線恢復中立位
Figure3. X-ray films of a 65-year-old male patient with osteoarthritis of left knee in RATKA groupFrom left to right for preoperative and3 days, 3 months after operation a. Anteroposterior images; b. Lateral images; c. Full-length of lower limbs images showed that the lower limb alignment had returned to a neutral position
3 討論
3.1 RATKA 術中常用機器人系統比較
目前,國內外使用較廣泛、技術較成熟的手術機器人是美國 Stryker 公司 Mako 系統。我們應用的國產 YUANHUA-TKA 系統,其基本原理、組成構造及使用流程與 Mako 系統類似。二者均為半主動操作型手術機器人,術前均需要患者 CT 圖像作為注冊參考信息;機器人操作前需將固定基準點位置的夾鉗連接在股骨與脛骨上,從而實現坐標系注冊配準;機器人機械臂末端擺鋸均受術者控制,交互式機械臂通過震動與警示音輔助術者在規劃區域范圍內截骨,安全性好。二者區別在于截骨方法不同,Mako 系統采用間隙平衡法截骨,傳感器顯示了膝關節屈伸過程中內、外側壓力大小與集中點,術中可以根據軟組織的平衡來調整術前下肢力線的規劃,保證軟組織平衡以及獲得理想下肢力線。而 YUANHUA-TKA 系統是采用測量截骨法截骨,術前根據 CT 圖像確定股骨頭中心、膝關節中心、內外踝位點等解剖位點,并生成截骨方案,術中按照該方案進行截骨,不再對術前下肢力線的規劃進行調整。本研究結果顯示與傳統 TKA 組相比,基于 YUANHUA-TKA 系統的 RATKA 組術后假體位置及下肢力線均較理想。但是與 Mako 系統相比假體位置與下肢力線恢復程度是否存在差異,有待進一步比較研究。與 Mako 系統相比,YUANHUA-TKA 系統主要有以下優勢:① 手術費用及維護費用較低;② Mako 系統為美國 Stryker 公司生產,術前規劃及數據需傳至國外處理,不僅繁瑣費時,還存在數據流失風險。
目前,國內研發的膝關節置換手術輔助系統除 YUANHUA-TKA 外,還有“鴻鵠”機器人系統(蘇州微創暢行機器人有限公司)。該系統與 YUANHUA-TKA 系統的區別在于其機械臂末端模塊不是擺鋸,是可以根據設定參數進行平移和任意角度旋轉的截骨導板,雖然這樣也能保證截骨精準性,但由于該系統擺鋸為術者手持,幅度范圍不受機械臂控制,因此無法將擺鋸操作限制在安全區域內。而 YUANHUA-TKA 系統通過震動與警示音輔助術者操作,限定在規劃區域內截骨的交互式機械臂安全性更高。
3.2 RATKA 療效分析
手術機器人通過整合計算機導航、可視化屏幕、機械臂等設備,在術中通過精確計算,根據實際情況確定假體覆蓋部分的截骨厚度、股骨遠端外翻截骨角度、股骨后髁外旋截骨角度、LTC 及站立位下肢力線情況,進而得到較好的下肢力線結果。Marchand 等[4]測量了 330 例接受 RATKA 的骨關節炎患者手術前后冠狀位下肢力線,64% 患者術前下肢力線存在超過 3° 的內翻畸形,11% 患者存在超過 3° 的外翻畸形;但所有患者術后下肢力線均糾正至中立位(±2°)。Kort 等[5]的 Meta 分析也得出 RATKA 能獲得更為準確的 HKA、FFC 以及 FTC。本研究兩組患者術后 FFC、FTC 以及 LFC 差異無統計學意義,但 RATKA 組患者 LTC 優于傳統 TKA 組,提示 RATKA 在調整下肢力線與假體安放位置方面具有一定優勢。
一項納入 80 例患者的前瞻性對照研究顯示,術后 1 個月時與傳統 TKA 相比,RATKA 組患者疼痛更輕,鎮痛藥物使用更少,血紅蛋白回升更快,能夠更早地完成直腿抬高動作[6]。Marchand 等[7] 術后 6 個月隨訪結果顯示,與傳統 TKA 組患者相比,RATKA 組患者術后疼痛更輕、滿意度更高。本研究中,兩組患者術后 3 個月膝關節疼痛 VAS 評分差值差異均無統計學意義,且評分均相對較低,這可能與本中心完善的圍術期疼痛管理有關。Liow 等[8]對 31 例接受 RATKA 和 29 例接受傳統 TKA 的患者進行簡明健康調查量表(SF-36 量表)評分,結果顯示術后 RATKA 組患者在情感評分和活力評分方面表現更佳。之后,該團隊另一項納入 60 例患者的前瞻性隨機對照研究顯示,傳統 TKA 組與 RATKA 組術后 6 個月、2 年的 KSS 評分及 ROM 差異均無統計學意義,但 RATKA 組 SF-36 量表評分更高[9]。此外,研究發現 RATKA 可以顯著改善患者術后 KSS 和 WOMAC 評分[10-11],但手術時間延長了 21.5 min[11]和 24.3 min[12]。與傳統 TKA 相比,RATKA 早中期 KSS 評分明顯更高[13]。
3.3 RATKA 對軟組織的保護
RATKA 具有更好的軟組織保護作用,術中截骨量和截骨范圍已根據術前計劃在系統中預先設定,縮小了操作空間。膝關節周圍軟組織均在設定操作區域之外,因此 RATKA 術中損傷后交叉韌帶及其止點、內外側副韌帶風險大大降低。此外,RATKA 無需進行脛骨前脫位和向外側翻轉髕骨的處理,降低了髕腱、股四頭肌腱和腘窩周圍軟組織的損傷,但這是否會減輕術后膝關節軟組織腫脹還需進一步探究。
一項尸體標本研究比較了 RATKA 和傳統 TKA 術中保護軟組織方面的差異[14],結果顯示 RATKA 可以更好地保護內、外側副韌帶,完整保留后交叉韌帶脛骨側止點,而傳統手術的 6 具標本中 2 具后交叉韌帶脛骨側止點被手術器械損傷,甚至離斷。但該結論是基于尸體標本研究,具有一定局限性。
3.4 手術操作要點
采用 YUANHUA-TKA 系統行 RATKA 手術操作要點:① 股骨和脛骨示蹤器固定釘需距離切口約 10 cm 植入,切口應完全顯露脛骨結節,前髁暴露區域盡量大;② 植入股骨和脛骨檢查釘時需避開截骨區域,其中股骨檢查釘頭部錐孔朝向股骨遠端;③ 因檢查釘為楔形,植入時以及植入后不可人為旋轉,否則容易發生松動;④ 點配準、面配準、獲取檢查點時,探針需扎透軟骨,不可扎入骨內,盡量恰好至骨面;⑤ 引導點僅作為采點區域參考,面配準點盡可能分散;⑥ 檢查伸直和屈曲間隙,再次確認股骨和脛骨截骨量,此步操作前應先去除骨贅,以防骨贅遮擋活動。如果患肢無法伸直,可先在后髁少量截骨。
在實際操作中,我們發現一個潛在的可能導致醫源性軟組織損傷的風險。若患者膝關節周圍骨贅較多,尤其是內、外副韌帶周圍增生骨贅需格外注意。在術前點、面配準時,為了提高配準精確度,暴露關節面時會清除嚴重影響患者膝關節屈伸的較大骨贅,而骨贅清除后其部位可能被其他軟組織充填,如韌帶等結構,但機器人系統基于術前計劃認為此處仍為多余骨贅需切除,因此術中可能出現截骨已達軟組織結構,但系統仍顯示操作在安全區域內的情況。為了規避該風險,除了術中術者小心操作外,對于骨贅較多的患者應在術前計劃階段將擺鋸操作安全范圍(截骨導板設置的安全范圍)設定值適當縮小,若無法完全鋸斷骨質可以手動修整,以保證原有骨贅周圍軟組織的安全。
綜上述,采用 YUANHUA-TKA 系統行 RATKA 能夠提高截骨準確度,使假體安放位置、角度以及下肢力線準確度大大提高,獲得較好近期療效,遠期療效有待進一步隨訪觀察。
作者貢獻:石小軍、蘇強、萬旭峰、周宗科負責試驗設計;袁銘成負責文章撰寫以及數據收集整理、統計分析。
利益沖突:所有作者聲明,在課題研究和文章撰寫過程中不存在利益沖突。
機構倫理問題:研究方案經四川大學華西醫院臨床試驗倫理審查委員會批準(HX-202014)。中國臨床試驗中心注冊號:ChiCTR2000031282。患者均簽署知情同意書。