引用本文: 涂源源, 萬大地, 汪群力. 機器人輔助與傳統人工全髖關節置換術后下肢長度差異的Meta分析. 中國修復重建外科雜志, 2022, 36(5): 561-566. doi: 10.7507/1002-1892.202112111 復制
版權信息: ?四川大學華西醫院華西期刊社《中國修復重建外科雜志》版權所有,未經授權不得轉載、改編
人工全髖關節置換術(total hip arthroplasty,THA)是臨床治療終末期髖關節疾患的主要方法[1]。下肢長度差異(leg length discrepancy,LLD)是置換術后常見并發癥之一,會導致術后嚴重坐骨神經損傷、腰痛、步態異常,嚴重影響患者對療效的滿意程度[2-5]。研究表明,即使LLD很小,在行走和站立時也會導致肢體負荷不對稱,隨時間推移,可能造成嚴重的骨骼與肌肉問題[6]。近年,機器人輔助手術技術在THA中的應用逐漸增加,以期提高手術準確性、縮小術后LLD,但臨床應用發現其與傳統THA相比無顯著差異。考慮到使用機器人手術帶來的額外經濟負擔,臨床對于是否在THA中使用機器人輔助存在爭議。本研究根據PRISMA聲明[7]采用Meta分析方法,分析機器人輔助與傳統THA術后LLD,以期為臨床實踐提供參考。
1 資料與方法
1.1 納入與排除標準
1.1.1 研究類型
隊列研究。
1.1.2 研究對象
接受THA的終末期髖關節疾病患者。
1.1.3 暴露因素
暴露組:機器人輔助下THA;非暴露組:傳統THA。
1.1.4 結局指標
主要結局指標:術后LLD;次要結局指標:手術時間、術后Harris評分、術后關節遺忘度評分(FJS)、術后西安大略和麥克馬斯特大學骨關節炎指數評分(WOMAC)、術后髖臼外展角、術后髖臼前傾角、術后并發癥發生率。
1.1.5 排除標準
無對照組、數據缺失、個案、綜述、會議論文。
1.2 文獻檢索策略
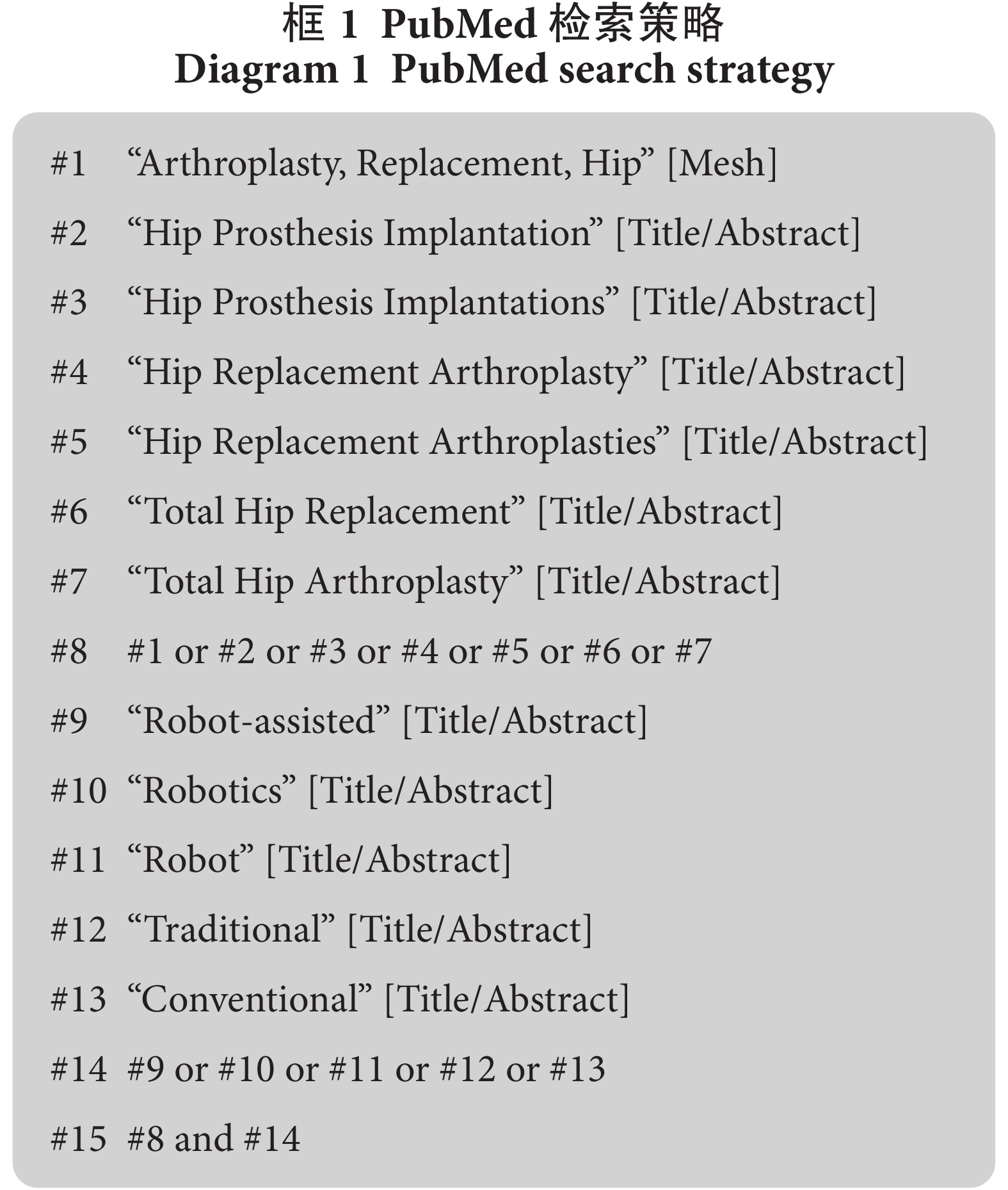
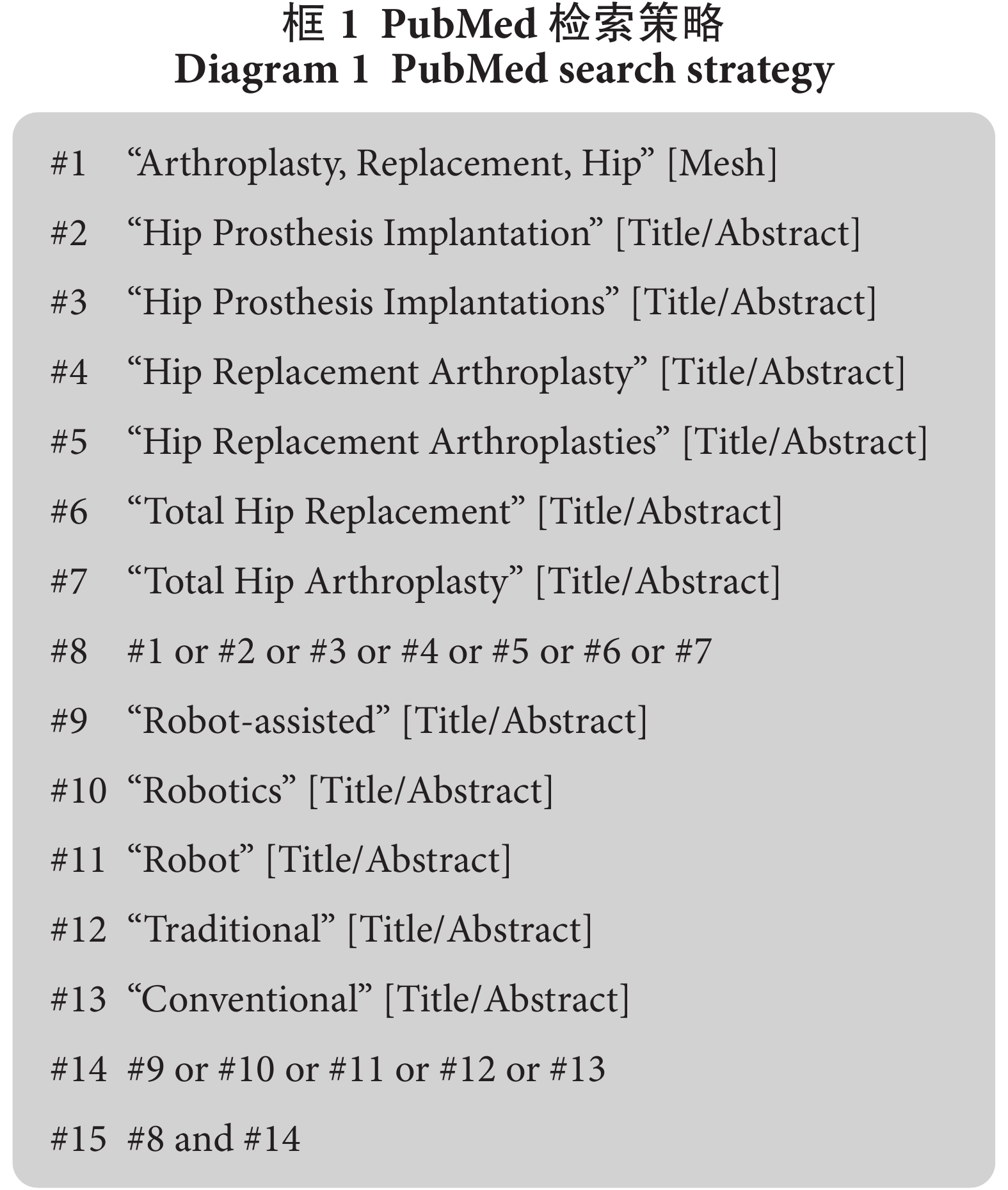
計算機檢索The Cochrane Library、PubMed、Web of Science、EMbase、CNKI、萬方、維普和CBM數據庫,搜索國內外有關機器人輔助或傳統THA研究文獻,檢索時限均從建庫至2021年8月11日。中文檢索詞包括:關節成形術、置換、髖、全髖關節置換術、人工全髖置換術、全髖關節成形術、全髖置換術、人工全髖關節置換、機器人輔助、傳統方法、機器人、輔助;英文檢索詞包括:Arthroplasty、Replacement、Hip、Hip prosthesis implantation、Hip prosthesis implantations、Hip replacement arthroplasty、Hip replacement arthroplasties、Total hip replacement、Total hip arthroplasty、Robot-assisted、Robotics、Robot、Traditional、Conventional。以PubMed檢索為例,其具體檢索策略見框1。同時通過文獻閱讀等其他方式獲取相關文獻。
 圖k1
圖k1
1.3 文獻篩選和資料提取
由第一作者和通信作者在Endnote X9軟件中獨立篩選文獻、提取數據并交叉核對。如有分歧,則進行數據復查,直至提取數據結果一致。資料提取內容:① 納入研究基本信息:研究題目、第一作者、發表年、研究類型、國家;② 研究對象基線特征;③ 評價偏倚風險的關鍵要素;④ 所關注的結局指標和結果測量數據。
1.4 納入研究的偏倚風險評估
本文納入的文獻均為隊列研究,使用紐卡斯爾-渥太華量表(NOS)[8]進行文章質量評價。評價指標包括研究人群選擇、組間可比性和結局測量,滿分為 9 分,≥7分為高質量,5~6分為中等質量,<5分為低質量。
1.5 統計分析
使用 RevMan 5.3 軟件進行 Meta 分析。納入研究結果間的異質性采用Q檢驗進行分析(檢驗水準α=0.1),同時結合I2定量判定異質性大小。如各研究結果間無統計學異質性,使用固定效應模型進行Meta分析;如各研究結果間存在統計學異質性,進一步分析異質性來源,排除明顯臨床異質性影響后,采用隨機效應模型進行Meta分析。Meta分析水準設為α=0.05。若存在明顯臨床異質性可以進行亞組分析或敏感性分析,或只進行描述性分析。使用漏斗圖評估發表偏倚。
2 結果
2.1 文獻篩選流程及結果
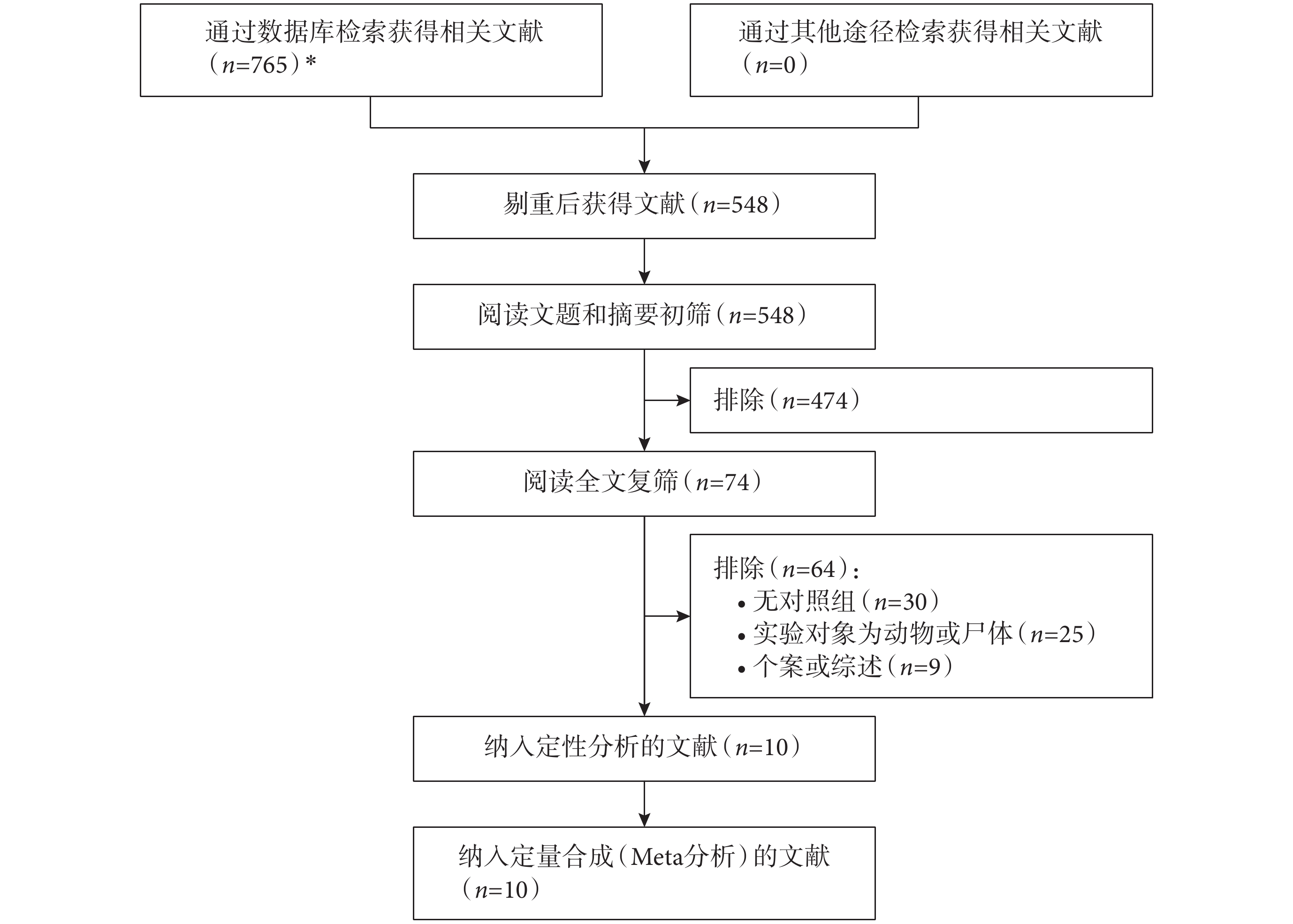
從納入的8個數據庫中初檢提取765篇文獻,經逐層篩選后,最終納入10個研究進行分析。文獻篩選流程及結果見圖1。
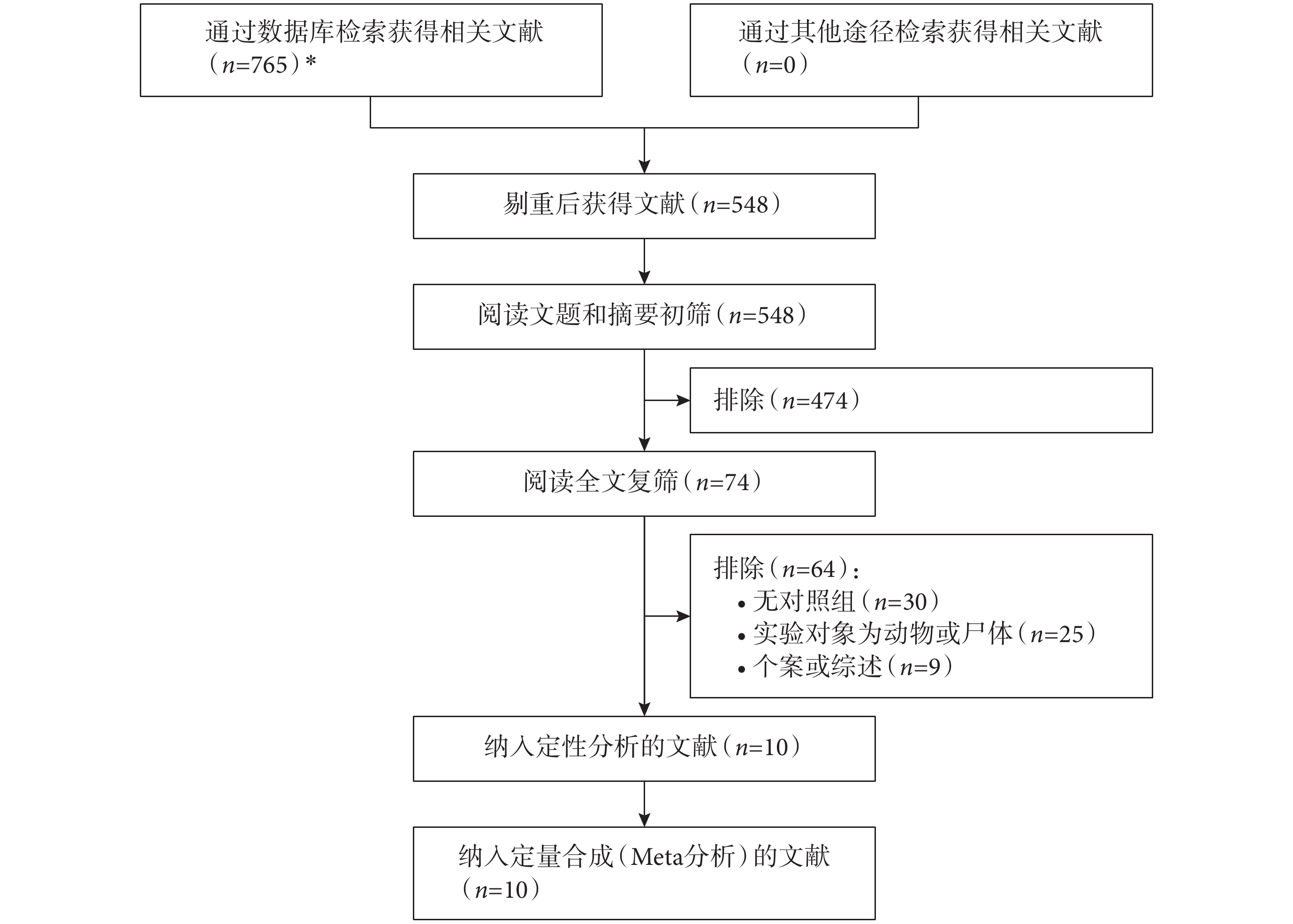 圖1
文獻篩選流程及結果
圖1
文獻篩選流程及結果
*所檢索的數據庫及檢出文獻數具體如下:PubMed(n=55)、The Cochrane Library (n=41)、EMbase(n=103)、Web of Science (n=305)、CBM(n=16)、萬方(n=55)、CNKI(n=167)、維普(n=23)
Figure1. Literature screening process and results2.2 納入研究的基本特征與偏倚風險評價結果
2.3 Meta分析結果
2.3.1 術后LLD
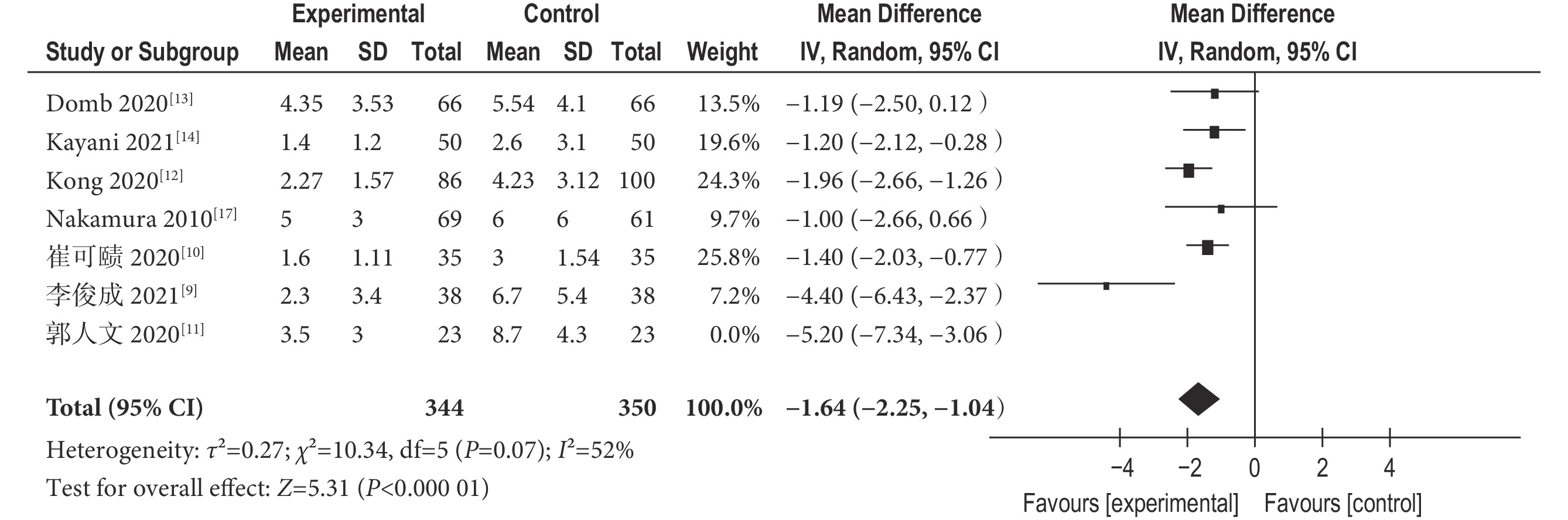
共納入7個研究[9-14, 17]。Meta分析結果顯示,機器人輔助與傳統THA術后LLD差異有統計學意義 [MD=?1.64,95%CI(?2.25,?1.04),P<0.001]。見圖2及表3。
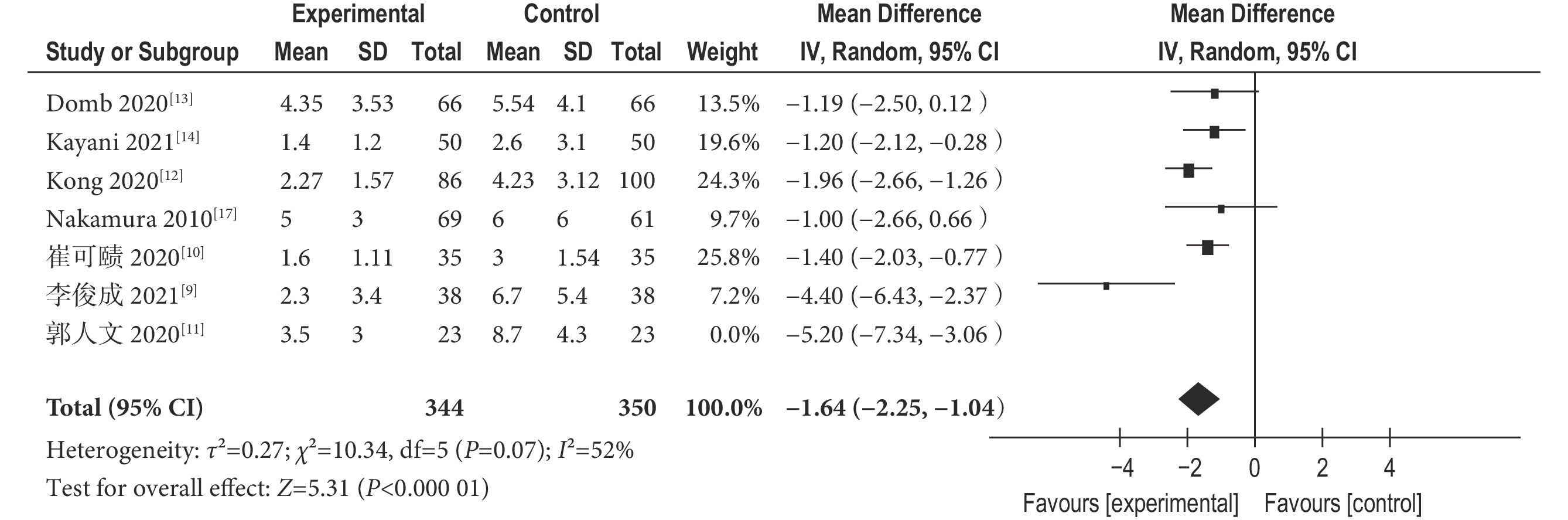 圖2
兩組術后LLD森林圖
Figure2.
Forest plot of the LLD of both groups after operation
圖2
兩組術后LLD森林圖
Figure2.
Forest plot of the LLD of both groups after operation
2.3.2 手術時間
共納入7個研究[9-12, 14, 16-17]。Meta分析結果顯示,機器人輔助與傳統THA手術操作時間差異有統計學意義 [MD=8.36,95%CI(4.56,12.17),P<0.000 1]。見表3。
2.3.3 術后3個月Harris評分
共納入3個研究[10, 12, 18]。Meta分析結果顯示,機器人輔助與傳統THA術后3個月Harris評分差異有統計學意義[MD=1.50,95%CI(0.44,2.57),P=0.006]。見表3。
2.3.4 術后6個月Harris評分
共納入4個研究[9-11, 18]。Meta分析結果顯示,機器人輔助與傳統THA術后6個月Harris評分差異無統計學意義[MD=0.83,95%CI(?0.01,1.66),P=0.05]。見表3。
2.3.5 術后12個月Harris評分
共納入4個研究[11, 13, 15, 18]。Meta分析結果顯示,機器人輔助與傳統THA術后12個月Harris評分差異有統計學意義[MD=7.60,95%CI(2.51,12.68),P=0.003]。見表3。
2.3.6 術后6個月FJS評分
共納入3個研究[9-11]。Meta分析結果顯示,機器人輔助與傳統THA術后6個月FJS評分差異無統計學意義[MD=0.91,95%CI(–0.68,2.51),P=0.26]。見表3。
2.3.7 術后髖臼外展角
共納入5個研究[10-13, 16]。Meta分析結果顯示,機器人輔助與傳統THA術后髖臼外展角差異無統計學意義[MD=?1.13,95%CI(?2.93,0.67),P=0.22]。見表3。
2.3.8 術后髖臼前傾角
共納入5個研究[10-13, 16]。Meta分析結果顯示,機器人輔助與傳統THA術后髖臼前傾角差異有統計學意義[MD=1.91,95%CI(1.43,2.40),P<0.000 1]。見表3。
2.3.9 術后并發癥發生率
共納入7個研究[9-14, 17]。Meta分析結果顯示,THA使用機器人輔助與傳統THA術后并發癥發生率差異無統計學意義[RR=0.92, 95%CI(0.54,1.55),P=0.75]。見表3。
2.3.10 術后WOMAC評分
僅1個研究對術后14年WOMAC評分進行分析[15]。機器人輔助THA組WOMAC評分為(8.44±11.48)分,傳統THA組為(11.32±11.92)分,兩組比較差異有統計學意義(P=0.034)。
2.4 敏感性分析
異質性分析顯示,術后LLD存在統計學異質性(I2=71%,P=0.002),查找異質性的來源剔除1篇文獻時異質性下降最明顯(I2=52%)[11]。術后3個月Harris評分存在統計學異質性(I2=77%,P=0.01),查找異質性來源剔除1篇文獻時異質性下降最明顯(I2=0%)[12]。術后12個月Harris評分存在統計學異質性(I2=89%,P<0.001),查找異質性來源剔除1篇文獻時異質性下降最明顯(I2=66%)[18]。術后髖臼外展角存在統計學異質性(I2=83%,P<0.001),查找異質性來源剔除1篇文獻時異質性下降最明顯(I2=76%)[10]。
2.5 發表偏倚評價
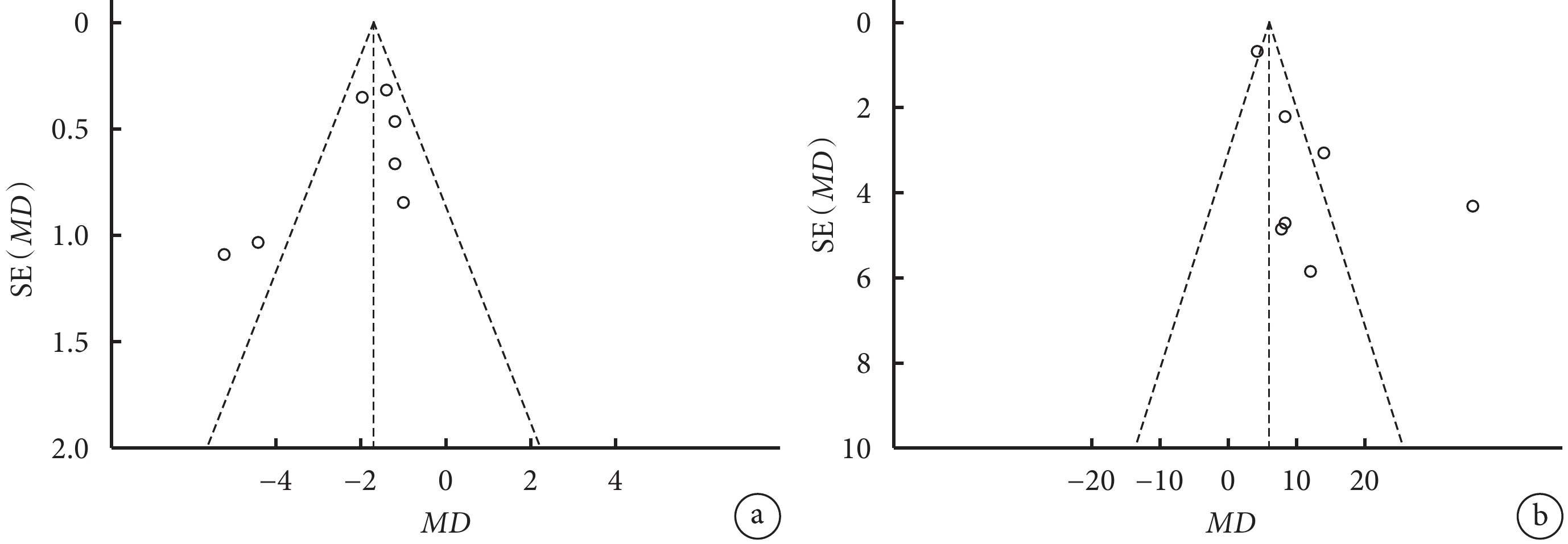
以主要結局指標術后LLD以及納入研究較多的手術時間作漏斗圖,提示可能存在發表偏倚。見圖3。
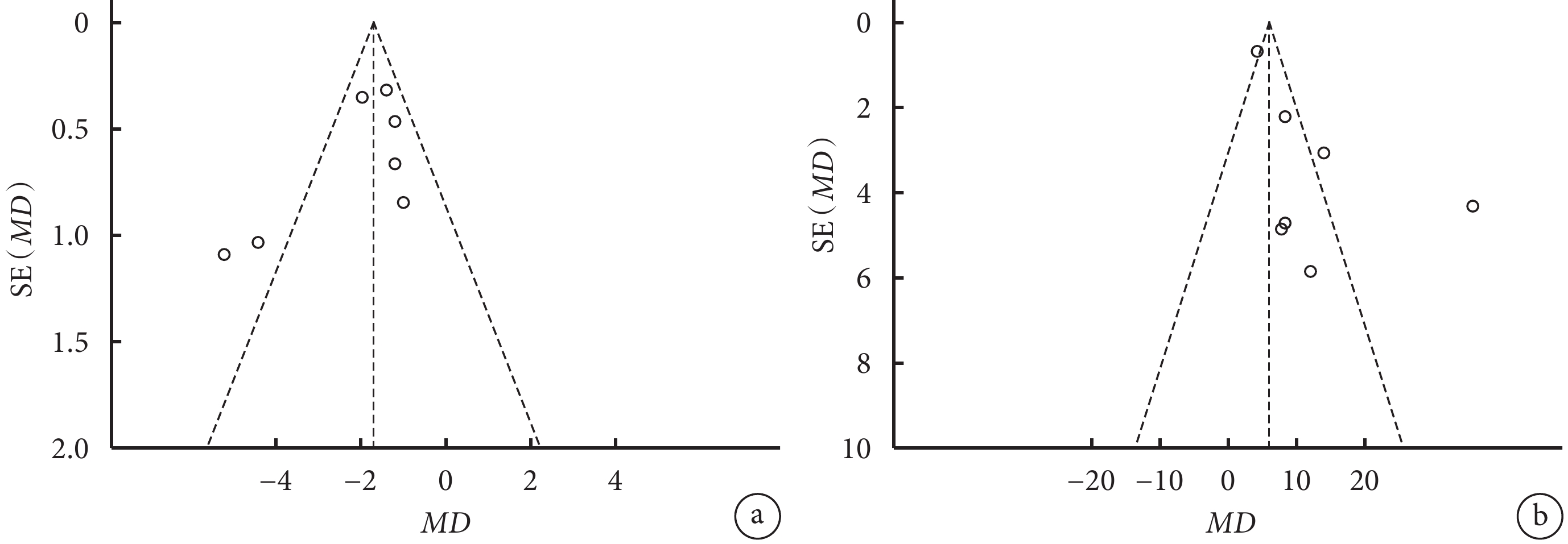 圖3
發表偏倚分析漏斗圖
圖3
發表偏倚分析漏斗圖
a. 術后LLD;b. 手術時間
Figure3. Funnel plots of publication biasa. LLD after operation; b. Operative time
3 討論
機器人輔助THA是當今關節外科的研究熱點,通過計算機導航實現術前設計、術中監控,可顯著提高髖關節假體植入位置的準確性[17],與傳統THA相比有效減小了術后LLD,達到雙下肢等長目的[19]。單中心研究表明,機器人輔助THA能將術后LLD有效控制在5 mm以內[18-19],這些結果與本次Meta分析結果支持了上述結論。對于手術時間而言,Meta分析結果表明機器人輔助THA手術時間更長,考慮與機器人技術學習曲線長有關。也有研究表明,隨著手術量的增多,當手術技術成熟后,機器人輔助THA的手術時間能較使用初期明顯下降[20]。對于髖臼前傾角,Meta分析結果表明,機器人輔助THA的術后髖臼前傾角更大,考慮與機器人輔助術前設計髖臼前傾角往往設定值為20° 有關,而傳統THA髖臼前傾角大小往往是由術者根據經驗決定。同時受髖臼側磨銼深度和角度的影響,部分患者存在骨質疏松或者局部骨硬化,部分患者髖臼馬蹄窩發育不良而較淺,從而使術者不能很好地實現髖臼窩磨銼,影響了前傾角大小。對于髖關節Harris評分,Meta分析結果表明機器人輔助術后3、12個月Harris評分優于傳統THA,考慮與機器人輔助THA術中股骨側截骨、髖臼側磨銼、假體打入準確性更高,從而減少了反復截骨調整、松解軟組織等操作造成髖關節軟組織損傷有關。
本研究局限性:① 僅檢索了8個常用的中英文數據庫,存在遺漏其他語言數據庫收錄文獻可能;② 存在一定報告偏倚,僅對臨床關注較多的結局指標進行分析;③ 納入研究數量較少,且均為隊列研究,樣本量較小;④ 納入研究地域不同,包括中國、美國、英國、日本,不同地域的研究對象會造成較大的異質性來源;⑤ 術者THA技術熟練度、假體類型、圍術期對患者處理方式不同;⑥ Harris評分、FJS評分等療效評分記錄員不同,也會造成異質性;⑦ 納入研究的隨訪時間均較短。
綜上述,機器人輔助THA在術后LLD、術后3個月及12個月Harris評分更優于傳統THA。但是傳統THA手術時間更短,且術后髖臼前傾角更小。由于研究數量和質量有限,上述結論還需更多樣本、多中心、長期隨訪的隨機對照試驗驗證。
利益沖突 在課題研究和文章撰寫過程中不存在利益沖突;經費支持沒有影響文章觀點和對研究數據客觀結果的統計分析及其報道
作者貢獻聲明 涂源源、萬大地:研究設計、資料收集及論文撰寫;萬大地:數據分析;汪群力:資料收集、文章審校
人工全髖關節置換術(total hip arthroplasty,THA)是臨床治療終末期髖關節疾患的主要方法[1]。下肢長度差異(leg length discrepancy,LLD)是置換術后常見并發癥之一,會導致術后嚴重坐骨神經損傷、腰痛、步態異常,嚴重影響患者對療效的滿意程度[2-5]。研究表明,即使LLD很小,在行走和站立時也會導致肢體負荷不對稱,隨時間推移,可能造成嚴重的骨骼與肌肉問題[6]。近年,機器人輔助手術技術在THA中的應用逐漸增加,以期提高手術準確性、縮小術后LLD,但臨床應用發現其與傳統THA相比無顯著差異。考慮到使用機器人手術帶來的額外經濟負擔,臨床對于是否在THA中使用機器人輔助存在爭議。本研究根據PRISMA聲明[7]采用Meta分析方法,分析機器人輔助與傳統THA術后LLD,以期為臨床實踐提供參考。
1 資料與方法
1.1 納入與排除標準
1.1.1 研究類型
隊列研究。
1.1.2 研究對象
接受THA的終末期髖關節疾病患者。
1.1.3 暴露因素
暴露組:機器人輔助下THA;非暴露組:傳統THA。
1.1.4 結局指標
主要結局指標:術后LLD;次要結局指標:手術時間、術后Harris評分、術后關節遺忘度評分(FJS)、術后西安大略和麥克馬斯特大學骨關節炎指數評分(WOMAC)、術后髖臼外展角、術后髖臼前傾角、術后并發癥發生率。
1.1.5 排除標準
無對照組、數據缺失、個案、綜述、會議論文。
1.2 文獻檢索策略
計算機檢索The Cochrane Library、PubMed、Web of Science、EMbase、CNKI、萬方、維普和CBM數據庫,搜索國內外有關機器人輔助或傳統THA研究文獻,檢索時限均從建庫至2021年8月11日。中文檢索詞包括:關節成形術、置換、髖、全髖關節置換術、人工全髖置換術、全髖關節成形術、全髖置換術、人工全髖關節置換、機器人輔助、傳統方法、機器人、輔助;英文檢索詞包括:Arthroplasty、Replacement、Hip、Hip prosthesis implantation、Hip prosthesis implantations、Hip replacement arthroplasty、Hip replacement arthroplasties、Total hip replacement、Total hip arthroplasty、Robot-assisted、Robotics、Robot、Traditional、Conventional。以PubMed檢索為例,其具體檢索策略見框1。同時通過文獻閱讀等其他方式獲取相關文獻。
圖k1
1.3 文獻篩選和資料提取
由第一作者和通信作者在Endnote X9軟件中獨立篩選文獻、提取數據并交叉核對。如有分歧,則進行數據復查,直至提取數據結果一致。資料提取內容:① 納入研究基本信息:研究題目、第一作者、發表年、研究類型、國家;② 研究對象基線特征;③ 評價偏倚風險的關鍵要素;④ 所關注的結局指標和結果測量數據。
1.4 納入研究的偏倚風險評估
本文納入的文獻均為隊列研究,使用紐卡斯爾-渥太華量表(NOS)[8]進行文章質量評價。評價指標包括研究人群選擇、組間可比性和結局測量,滿分為 9 分,≥7分為高質量,5~6分為中等質量,<5分為低質量。
1.5 統計分析
使用 RevMan 5.3 軟件進行 Meta 分析。納入研究結果間的異質性采用Q檢驗進行分析(檢驗水準α=0.1),同時結合I2定量判定異質性大小。如各研究結果間無統計學異質性,使用固定效應模型進行Meta分析;如各研究結果間存在統計學異質性,進一步分析異質性來源,排除明顯臨床異質性影響后,采用隨機效應模型進行Meta分析。Meta分析水準設為α=0.05。若存在明顯臨床異質性可以進行亞組分析或敏感性分析,或只進行描述性分析。使用漏斗圖評估發表偏倚。
2 結果
2.1 文獻篩選流程及結果
從納入的8個數據庫中初檢提取765篇文獻,經逐層篩選后,最終納入10個研究進行分析。文獻篩選流程及結果見圖1。
圖1
文獻篩選流程及結果
*所檢索的數據庫及檢出文獻數具體如下:PubMed(n=55)、The Cochrane Library (n=41)、EMbase(n=103)、Web of Science (n=305)、CBM(n=16)、萬方(n=55)、CNKI(n=167)、維普(n=23)
Figure1. Literature screening process and results2.2 納入研究的基本特征與偏倚風險評價結果
2.3 Meta分析結果
2.3.1 術后LLD
共納入7個研究[9-14, 17]。Meta分析結果顯示,機器人輔助與傳統THA術后LLD差異有統計學意義 [MD=?1.64,95%CI(?2.25,?1.04),P<0.001]。見圖2及表3。
圖2
兩組術后LLD森林圖
Figure2.
Forest plot of the LLD of both groups after operation
2.3.2 手術時間
共納入7個研究[9-12, 14, 16-17]。Meta分析結果顯示,機器人輔助與傳統THA手術操作時間差異有統計學意義 [MD=8.36,95%CI(4.56,12.17),P<0.000 1]。見表3。
2.3.3 術后3個月Harris評分
共納入3個研究[10, 12, 18]。Meta分析結果顯示,機器人輔助與傳統THA術后3個月Harris評分差異有統計學意義[MD=1.50,95%CI(0.44,2.57),P=0.006]。見表3。
2.3.4 術后6個月Harris評分
共納入4個研究[9-11, 18]。Meta分析結果顯示,機器人輔助與傳統THA術后6個月Harris評分差異無統計學意義[MD=0.83,95%CI(?0.01,1.66),P=0.05]。見表3。
2.3.5 術后12個月Harris評分
共納入4個研究[11, 13, 15, 18]。Meta分析結果顯示,機器人輔助與傳統THA術后12個月Harris評分差異有統計學意義[MD=7.60,95%CI(2.51,12.68),P=0.003]。見表3。
2.3.6 術后6個月FJS評分
共納入3個研究[9-11]。Meta分析結果顯示,機器人輔助與傳統THA術后6個月FJS評分差異無統計學意義[MD=0.91,95%CI(–0.68,2.51),P=0.26]。見表3。
2.3.7 術后髖臼外展角
共納入5個研究[10-13, 16]。Meta分析結果顯示,機器人輔助與傳統THA術后髖臼外展角差異無統計學意義[MD=?1.13,95%CI(?2.93,0.67),P=0.22]。見表3。
2.3.8 術后髖臼前傾角
共納入5個研究[10-13, 16]。Meta分析結果顯示,機器人輔助與傳統THA術后髖臼前傾角差異有統計學意義[MD=1.91,95%CI(1.43,2.40),P<0.000 1]。見表3。
2.3.9 術后并發癥發生率
共納入7個研究[9-14, 17]。Meta分析結果顯示,THA使用機器人輔助與傳統THA術后并發癥發生率差異無統計學意義[RR=0.92, 95%CI(0.54,1.55),P=0.75]。見表3。
2.3.10 術后WOMAC評分
僅1個研究對術后14年WOMAC評分進行分析[15]。機器人輔助THA組WOMAC評分為(8.44±11.48)分,傳統THA組為(11.32±11.92)分,兩組比較差異有統計學意義(P=0.034)。
2.4 敏感性分析
異質性分析顯示,術后LLD存在統計學異質性(I2=71%,P=0.002),查找異質性的來源剔除1篇文獻時異質性下降最明顯(I2=52%)[11]。術后3個月Harris評分存在統計學異質性(I2=77%,P=0.01),查找異質性來源剔除1篇文獻時異質性下降最明顯(I2=0%)[12]。術后12個月Harris評分存在統計學異質性(I2=89%,P<0.001),查找異質性來源剔除1篇文獻時異質性下降最明顯(I2=66%)[18]。術后髖臼外展角存在統計學異質性(I2=83%,P<0.001),查找異質性來源剔除1篇文獻時異質性下降最明顯(I2=76%)[10]。
2.5 發表偏倚評價
以主要結局指標術后LLD以及納入研究較多的手術時間作漏斗圖,提示可能存在發表偏倚。見圖3。
圖3
發表偏倚分析漏斗圖
a. 術后LLD;b. 手術時間
Figure3. Funnel plots of publication biasa. LLD after operation; b. Operative time
3 討論
機器人輔助THA是當今關節外科的研究熱點,通過計算機導航實現術前設計、術中監控,可顯著提高髖關節假體植入位置的準確性[17],與傳統THA相比有效減小了術后LLD,達到雙下肢等長目的[19]。單中心研究表明,機器人輔助THA能將術后LLD有效控制在5 mm以內[18-19],這些結果與本次Meta分析結果支持了上述結論。對于手術時間而言,Meta分析結果表明機器人輔助THA手術時間更長,考慮與機器人技術學習曲線長有關。也有研究表明,隨著手術量的增多,當手術技術成熟后,機器人輔助THA的手術時間能較使用初期明顯下降[20]。對于髖臼前傾角,Meta分析結果表明,機器人輔助THA的術后髖臼前傾角更大,考慮與機器人輔助術前設計髖臼前傾角往往設定值為20° 有關,而傳統THA髖臼前傾角大小往往是由術者根據經驗決定。同時受髖臼側磨銼深度和角度的影響,部分患者存在骨質疏松或者局部骨硬化,部分患者髖臼馬蹄窩發育不良而較淺,從而使術者不能很好地實現髖臼窩磨銼,影響了前傾角大小。對于髖關節Harris評分,Meta分析結果表明機器人輔助術后3、12個月Harris評分優于傳統THA,考慮與機器人輔助THA術中股骨側截骨、髖臼側磨銼、假體打入準確性更高,從而減少了反復截骨調整、松解軟組織等操作造成髖關節軟組織損傷有關。
本研究局限性:① 僅檢索了8個常用的中英文數據庫,存在遺漏其他語言數據庫收錄文獻可能;② 存在一定報告偏倚,僅對臨床關注較多的結局指標進行分析;③ 納入研究數量較少,且均為隊列研究,樣本量較小;④ 納入研究地域不同,包括中國、美國、英國、日本,不同地域的研究對象會造成較大的異質性來源;⑤ 術者THA技術熟練度、假體類型、圍術期對患者處理方式不同;⑥ Harris評分、FJS評分等療效評分記錄員不同,也會造成異質性;⑦ 納入研究的隨訪時間均較短。
綜上述,機器人輔助THA在術后LLD、術后3個月及12個月Harris評分更優于傳統THA。但是傳統THA手術時間更短,且術后髖臼前傾角更小。由于研究數量和質量有限,上述結論還需更多樣本、多中心、長期隨訪的隨機對照試驗驗證。
利益沖突 在課題研究和文章撰寫過程中不存在利益沖突;經費支持沒有影響文章觀點和對研究數據客觀結果的統計分析及其報道
作者貢獻聲明 涂源源、萬大地:研究設計、資料收集及論文撰寫;萬大地:數據分析;汪群力:資料收集、文章審校