引用本文: 馮均偉, 梁偉民, 王躍, 唐智, 阿木夫沙, 許寶修, 何聶正浩, 郝鵬. 骨科機器人輔助微創手術與開放手術治療肢體骨樣骨瘤的比較研究. 中國修復重建外科雜志, 2024, 38(1): 40-45. doi: 10.7507/1002-1892.202310067 復制
版權信息: ?四川大學華西醫院華西期刊社《中國修復重建外科雜志》版權所有,未經授權不得轉載、改編
骨樣骨瘤是臨床常見的成骨源性腫瘤,占良性骨腫瘤的11%~14%[1],常見于股骨、脛骨、肱骨等四肢長骨[2-4],可位于骨皮質內、髓內或骨膜下甚至關節內[5-6]。骨樣骨瘤瘤巢小,直徑常在1 cm以內[7]。影像診斷主要依據X線片和CT圖像,特征為較小的低密度瘤巢被高密度硬化骨包圍[8-9]。該類疾病經典手術方式是開放性瘤巢整塊切除,但創傷較大,術后骨折發生率可達4.5%[8]。如何精準、微創、安全地切除骨樣骨瘤,一直是骨科領域研究熱點。CT引導下的射頻消融由于創傷小,逐漸成為治療骨樣骨瘤的微創手術代表[10-11],但該手術輻射值遠高于傳統開放手術中C臂X線機透視[12],而輻射安全問題不容忽視。近年來,機器人手術技術不斷進步,具有精準、微創等優點,骨科機器人已廣泛應用于脊柱、創傷、關節外科等手術中,并獲得較好療效[13-17]。2017年9月,我院開始使用天璣骨科機器人(北京天智航醫療科技股份有限公司)輔助肢體骨樣骨瘤切除。為進一步探討骨科機器人輔助此類手術的準確性與療效,現回顧分析2016年6月—2023年6月采用開放或骨科機器人輔助下微創切除瘤巢的患者臨床資料。報告如下。
1 臨床資料
1.1 一般資料
患者納入標準:① 2016年6月—2023年6月我科治療的四肢長骨骨樣骨瘤患者,臨床表現、影像學檢查及病理診斷符合骨樣骨瘤;② 接受開放或骨科機器人輔助下微創手術治療; ③ 術后患者在本院隨訪且臨床資料完整。
2016年6月—2023年6月,共36例患者符合選擇標準納入研究。術前向患者或監護人介紹具體手術方式及相關費用后,其中16例患者自愿選擇骨科機器人輔助下微創切除瘤巢手術(機器人手術組),20例采用常規C臂X線機透視定位后切除腫瘤(開放手術組)。兩組患者性別、年齡、病灶部位、瘤巢直徑以及術前疼痛視覺模擬評分(VAS)等基線資料比較,差異均無統計學意義(P>0.05),具有可比性。見表1。患者病灶部位均有中至重度疼痛(VAS評分≥5分)。X線片及 CT檢查均可見病灶區呈較小類圓形瘤巢,周圍見均勻梭形硬化骨。
1.2 手術方法
手術均由同一位高年資副主任骨科醫師主刀完成。兩組均采用全身麻醉,術前30 min預防性使用抗生素,術中取出病灶組織均行病理檢查。
1.2.1 機器人手術組
患者仰臥于骨科牽引床上,患肢伸直牽引固定。常規消毒鋪巾后,在腫瘤病灶鄰近部位安放示蹤器,然后用C臂X線機進行正、側位透視,將圖像數據導入骨科機器人系統后,避開血管、神經等重要組織結構,根據病灶位置進行手術路徑規劃;完成規劃后啟動機器人自動導航功能,進行機械臂定位;完成定位后沿機械臂導向器先鉆入1枚1.5 mm克氏針達病灶,透視證實克氏針尖部位于瘤巢中心后,作長約2 cm皮膚切口,血管鉗分離周圍軟組織至骨面,軟組織較厚部位沿導針放入通道管以保護周圍軟組織。用與術前測量的瘤巢直徑相匹配的空心鉆經通道管鉆取病灶組織;如瘤巢組織未能一次性取出,可以在機械臂引導下再次進行操作,無需再次透視定位。手術操作過程機器人會對導針、環鉆方向進行實時監測。取出瘤巢組織后,再行正側位透視,以進一步驗證手術切除效果與術前規劃一致。
1.2.2 開放手術組
患者仰臥于手術床,常規消毒鋪巾后,根據術前影像學檢查結果確定瘤巢部位,C臂X線機行正側位透視定位后,在透視下鉆入1.5 mm克氏針,分別行正側位透視確定導針位置達到瘤巢,必要時重新調整導針位置。切開皮膚及軟組織,向兩側分離保護,用空心環鉆沿克氏針導向鉆至瘤巢,鉆孔過程中透視確定鉆頭方向及深度是否正確,至瘤巢徹底切除。
1.3 術后處理及療效評價指標
兩組患者術后處理方法一致。術后當天即開始肢體功能康復鍛煉,并允許部分負重,4周后完全負重。期間如有疼痛,VAS評分≥5分時予以布洛芬止痛對癥治療。
記錄并比較兩組手術時間、病灶切除時間、術中出血量、術中透視次數、病灶切除準確度、術后止痛藥使用次數。其中,手術時間定義為從消毒鋪巾開始至切口縫合結束為止;病灶切除時間定義為從切皮開始至切口縫合結束。使用醫學影像信息管理軟件分別在術前及術后1 d X線片測量瘤巢直徑及骨骼切除范圍直徑,兩者比值即為病灶切除準確度。術前及術后3 d、3個月采用VAS評分評估疼痛程度。
1.4 統計學方法
采用SPSS22.0統計軟件進行分析。計量資料采用Shapiro-Wilk檢驗進行正態性檢驗,如符合正態分布,以均數±標準差表示,組間比較采用獨立樣本t檢驗;兩組多時間點比較采用重復測量方差分析,若不滿足球形檢驗,采用Huynh-Feldt法進行校正,同一組別不同時間點間比較采用 Bonferroni 法,同一時間點不同組別間比較采用多因素方差分析;不符合正態分布時以M(Q1,Q3)表示,組間比較采用Mann-Whitney U檢驗;計數資料以例數表示,組間比較采用χ2檢驗;檢驗水準α=0.05。
2 結果
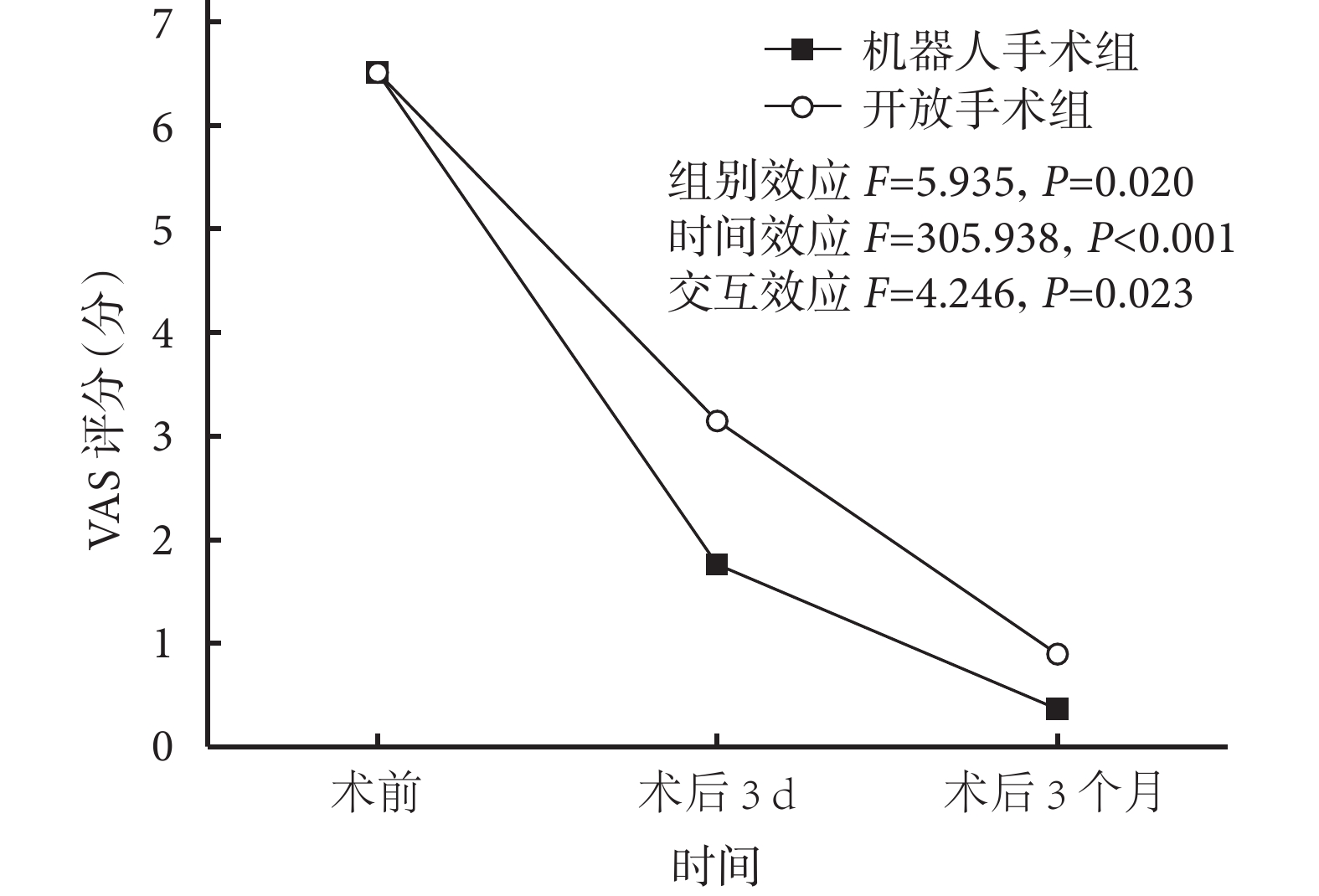
兩組術中均未植骨及使用內固定物。與開放手術組相比,機器人手術組手術時間延長,但術中出血量、透視次數及術后止痛藥使用次數均減少,病灶切除準確度提高,差異均有統計學意義(P<0.05);兩組病灶切除時間差異無統計學意義(P>0.05)。兩組患者術后均獲隨訪,隨訪時間均為3~24個月,中位時間均為12個月。術后兩組均無切口感染、骨折等并發癥發生。隨訪期間均無腫瘤復發。兩組患者術后3 d、3個月時VAS 評分均較術前改善,差異有統計學意義(P<0.05)。術后3 d機器人手術組VAS評分更低,差異有統計學意義(P<0.05),但術后3個月兩組間差異無統計學意義(P > 0.05)。見表2及圖1、2。
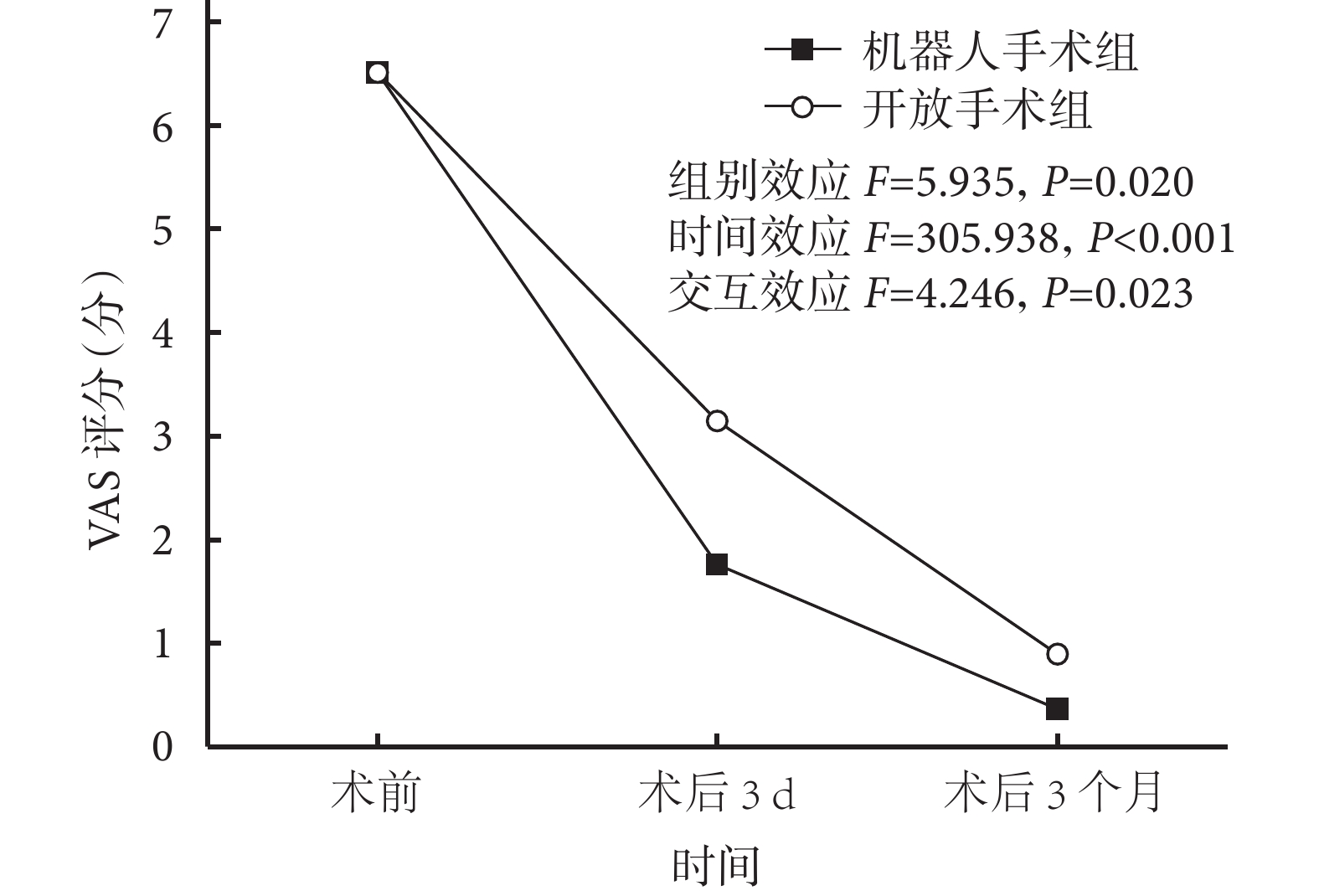 圖1
兩組VAS評分變化趨勢
Figure1.
Change trends of VAS scores in the two groups
圖1
兩組VAS評分變化趨勢
Figure1.
Change trends of VAS scores in the two groups
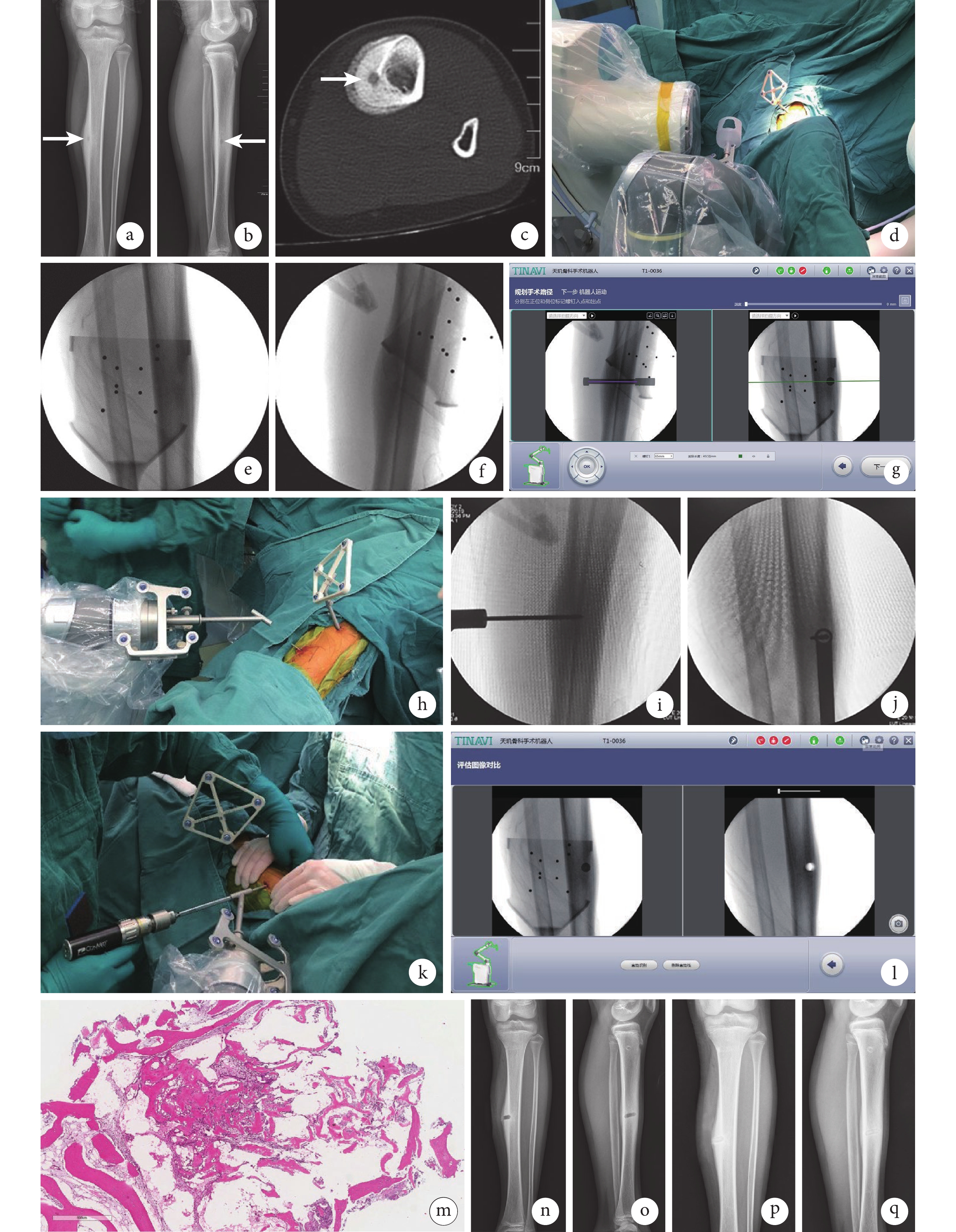
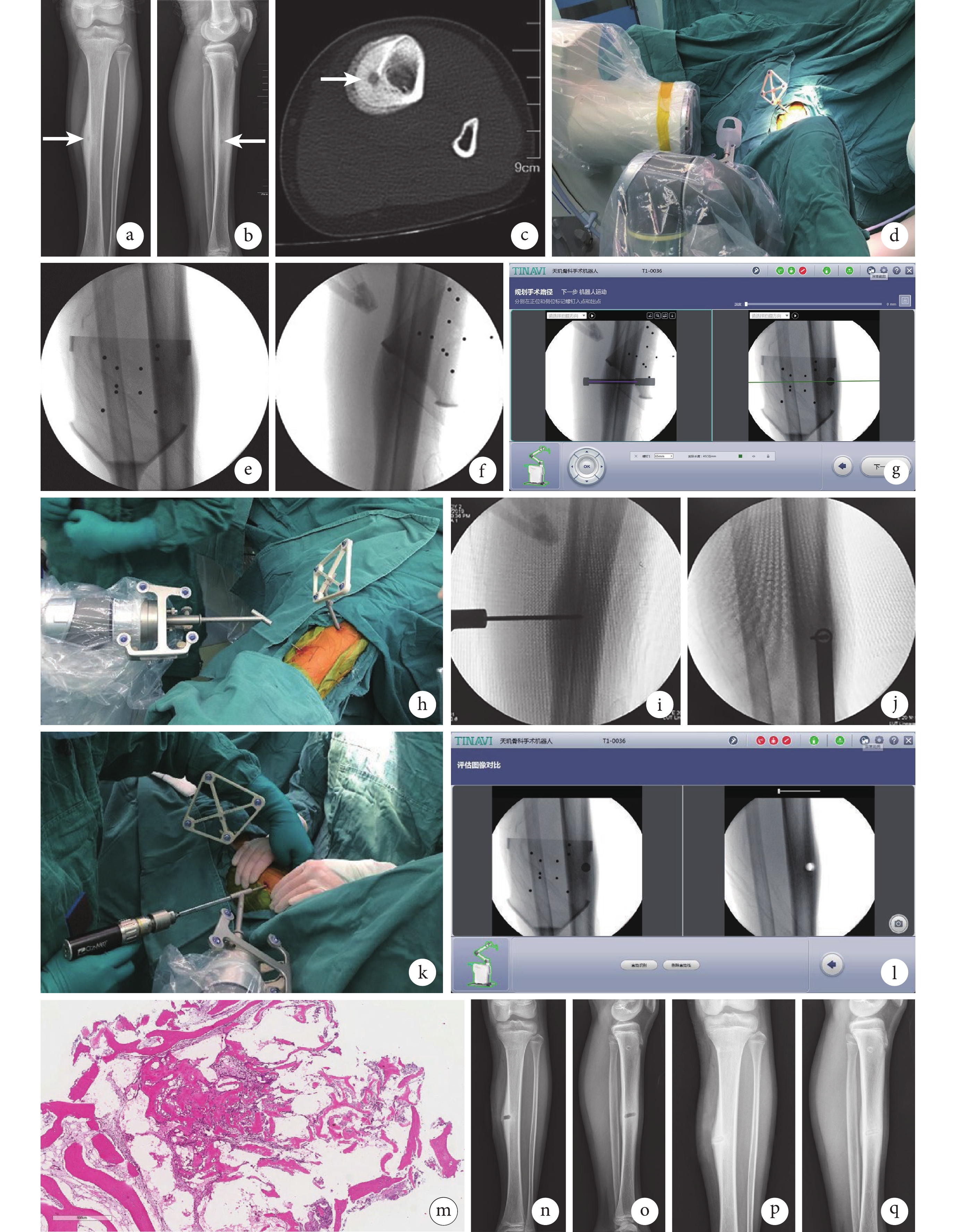 圖2
機器人手術組患兒,女,11歲,左脛骨中段骨樣骨瘤
圖2
機器人手術組患兒,女,11歲,左脛骨中段骨樣骨瘤
a、b. 術前正側位X線片示病灶位于左脛骨中段(箭頭);c. 術前CT示中心瘤巢(箭頭)及周圍硬化骨帶;d. 術中C臂X線機透視;e、f. 術中透視下在機器人操作系統檢查各定位點顯示;g. 術中在操作系統規劃手術路徑;h. 機器人按規劃路徑自動轉動機械臂將導向器指向病灶后,沿導向器置入導針;i、j. 術中正側位透視證實導針尖位于瘤巢中心;k. 術中空心環鉆沿導針切除瘤巢;l. 術中透視證實空心環鉆準確切除瘤巢;m. 術后病理切片可見中心瘤巢組織(HE×40);n、o. 術后1 d正側位X線片示準確切除瘤巢;p、q. 術后6個月正側位X線片
Figure2. A 11-year-old girl with osteoid osteoma of the left mid-tibia in the robot-assisted surgery groupa, b. Preoperative anteroposterior and lateral X-ray films of the left tibia showed that the lesion was located in the middle part of the left tibia (arrow); c. Preoperative CT showed the central tumor nidus (arrow) and surrounding sclerotic bone bands; d. Intraoperative C-arm fluoroscopy; e, f. The positioning points were displayed in the robot’s operating system after fluoroscopy; g. The surgical pathways were planned in the operating system; h. The robot automatically rotated the robot-assisted arm along the planned path to point the guide towards the lesion, and then placed a guide needle along the guide; i, j. Intraoperative anteroposterior and lateral X-ray films showed that the needle tip was located at the center of the tumor nidus; k. The hollow trephine was used to excise the tumor nidus along the guide needle; l. Intraoperative fluoroscopy confirmed that the hollow trephine accurately excised the tumor nidus; m. Pathological section showed the presence of central tumor nidus tissue (HE×40); n, o. Anteroposterior and lateral X-ray films at 1 day after operation showed the accurate resection of the tumor nidus; p, q. Anteroposterior and lateral X-ray films at 6 months after operation
3 討論
骨樣骨瘤發病常見于 5~25 歲人群[8],因瘤巢可產生高出正常水平100~1 000 倍的前列腺素,所以會出現劇烈疼痛[18],夜間痛醒是常見表現[19]。雖然通過非甾體類抗炎藥可改善癥狀[20],但長期疼痛及藥物副作用使患者難以耐受而選擇手術治療。骨樣骨瘤手術方式從常規開放整塊切除逐漸向微創手術發展[21]。既往常規開放手術常面臨的難題是因瘤巢體積較小,往往直徑僅幾毫米,切除第一步需準確定位病灶,在C臂X線機正側位透視后用導針鉆入瘤巢位置,在操作定位針時難以一次性準確定位至瘤巢中心,常需反復多次嘗試。骨科機器人具有精確導航及機械臂操作穩定性強的優勢,精準度達毫米級。操作時經C臂X線機透視、規劃路徑后,機械臂自動定位,沿其導筒置入導針,可以準確到達瘤巢中心;再在通道管保護下用環鉆鉆取瘤巢組織。本研究中,機器人手術組術中透視次數明顯少于開放手術組,病灶切除準確度高于開放手術組,由此避免了術中反復操作并減少了對鄰近正常組織的損傷。同時,機器人手術組術中出血更少,體現出機器人輔助手術更微創的優勢,術后早期疼痛程度更輕、使用止痛藥物用藥次數更少,有助于患者術后康復。
既往骨樣骨瘤切除手術中如瘤巢位于骨皮質內層、髓內,為徹底切除瘤巢,常需擴大切開硬化皮質骨“開窗”,擴大切除范圍可達1.5~2.0 cm[22],對骨質損傷大,增加病理性骨折風險。為減小對皮質骨損傷,采用環形鉆根據瘤巢大小選擇相應型號鉆頭鉆取病灶,是較微創方式[23]。本研究中機器人手術組及開放手術組均采用環形鉆來切除病灶組織,以減小對骨質的損傷,兩組患者在隨訪期間均無腫瘤復發,提示環形鉆切除方式有效。同時,骨科機器人輔助下環形鉆切除骨樣骨瘤的術式具有定位準確、切除創傷小的優勢。
本研究中機器人手術組的不足之處在于手術時間更長,主要為機器人手術需要定位、規劃等準備時間,但病灶切除操作時間與開放手術組無明顯差異。
綜上述,骨科機器人輔助下骨樣骨瘤環形鉆微創切除術雖然手術時間較開放手術更長,但病灶切除更精準,術中出血量更少、術后早期疼痛程度更輕,可以減少止痛藥物使用,具有精準、微創的優勢。但本研究為單中心回顧性分析,納入樣本量較少,隨訪時間較短,需更大樣本的前瞻性、多中心研究來進一步驗證結論。
志謝 四川省醫學科學院·四川省人民醫院病理科楊旭丹副主任醫師在病理診斷方面給予幫助
利益沖突 在課題研究和文章撰寫過程中不存在利益沖突
倫理聲明 研究方案經四川省醫學科學院·四川省人民醫院醫學倫理委員會批準 [倫審(研)2019 年第 290號]
作者貢獻聲明 馮均偉:數據收集、整理、統計分析和文章撰寫;郝鵬、馮均偉、梁偉民:科研設計及實施;唐智:骨科機器人實施及數據收集整理;阿木夫沙、許寶修、何聶正浩:參與病例隨訪與數據收集;郝鵬、王躍:文章整體設計與內容修改及審閱
骨樣骨瘤是臨床常見的成骨源性腫瘤,占良性骨腫瘤的11%~14%[1],常見于股骨、脛骨、肱骨等四肢長骨[2-4],可位于骨皮質內、髓內或骨膜下甚至關節內[5-6]。骨樣骨瘤瘤巢小,直徑常在1 cm以內[7]。影像診斷主要依據X線片和CT圖像,特征為較小的低密度瘤巢被高密度硬化骨包圍[8-9]。該類疾病經典手術方式是開放性瘤巢整塊切除,但創傷較大,術后骨折發生率可達4.5%[8]。如何精準、微創、安全地切除骨樣骨瘤,一直是骨科領域研究熱點。CT引導下的射頻消融由于創傷小,逐漸成為治療骨樣骨瘤的微創手術代表[10-11],但該手術輻射值遠高于傳統開放手術中C臂X線機透視[12],而輻射安全問題不容忽視。近年來,機器人手術技術不斷進步,具有精準、微創等優點,骨科機器人已廣泛應用于脊柱、創傷、關節外科等手術中,并獲得較好療效[13-17]。2017年9月,我院開始使用天璣骨科機器人(北京天智航醫療科技股份有限公司)輔助肢體骨樣骨瘤切除。為進一步探討骨科機器人輔助此類手術的準確性與療效,現回顧分析2016年6月—2023年6月采用開放或骨科機器人輔助下微創切除瘤巢的患者臨床資料。報告如下。
1 臨床資料
1.1 一般資料
患者納入標準:① 2016年6月—2023年6月我科治療的四肢長骨骨樣骨瘤患者,臨床表現、影像學檢查及病理診斷符合骨樣骨瘤;② 接受開放或骨科機器人輔助下微創手術治療; ③ 術后患者在本院隨訪且臨床資料完整。
2016年6月—2023年6月,共36例患者符合選擇標準納入研究。術前向患者或監護人介紹具體手術方式及相關費用后,其中16例患者自愿選擇骨科機器人輔助下微創切除瘤巢手術(機器人手術組),20例采用常規C臂X線機透視定位后切除腫瘤(開放手術組)。兩組患者性別、年齡、病灶部位、瘤巢直徑以及術前疼痛視覺模擬評分(VAS)等基線資料比較,差異均無統計學意義(P>0.05),具有可比性。見表1。患者病灶部位均有中至重度疼痛(VAS評分≥5分)。X線片及 CT檢查均可見病灶區呈較小類圓形瘤巢,周圍見均勻梭形硬化骨。
1.2 手術方法
手術均由同一位高年資副主任骨科醫師主刀完成。兩組均采用全身麻醉,術前30 min預防性使用抗生素,術中取出病灶組織均行病理檢查。
1.2.1 機器人手術組
患者仰臥于骨科牽引床上,患肢伸直牽引固定。常規消毒鋪巾后,在腫瘤病灶鄰近部位安放示蹤器,然后用C臂X線機進行正、側位透視,將圖像數據導入骨科機器人系統后,避開血管、神經等重要組織結構,根據病灶位置進行手術路徑規劃;完成規劃后啟動機器人自動導航功能,進行機械臂定位;完成定位后沿機械臂導向器先鉆入1枚1.5 mm克氏針達病灶,透視證實克氏針尖部位于瘤巢中心后,作長約2 cm皮膚切口,血管鉗分離周圍軟組織至骨面,軟組織較厚部位沿導針放入通道管以保護周圍軟組織。用與術前測量的瘤巢直徑相匹配的空心鉆經通道管鉆取病灶組織;如瘤巢組織未能一次性取出,可以在機械臂引導下再次進行操作,無需再次透視定位。手術操作過程機器人會對導針、環鉆方向進行實時監測。取出瘤巢組織后,再行正側位透視,以進一步驗證手術切除效果與術前規劃一致。
1.2.2 開放手術組
患者仰臥于手術床,常規消毒鋪巾后,根據術前影像學檢查結果確定瘤巢部位,C臂X線機行正側位透視定位后,在透視下鉆入1.5 mm克氏針,分別行正側位透視確定導針位置達到瘤巢,必要時重新調整導針位置。切開皮膚及軟組織,向兩側分離保護,用空心環鉆沿克氏針導向鉆至瘤巢,鉆孔過程中透視確定鉆頭方向及深度是否正確,至瘤巢徹底切除。
1.3 術后處理及療效評價指標
兩組患者術后處理方法一致。術后當天即開始肢體功能康復鍛煉,并允許部分負重,4周后完全負重。期間如有疼痛,VAS評分≥5分時予以布洛芬止痛對癥治療。
記錄并比較兩組手術時間、病灶切除時間、術中出血量、術中透視次數、病灶切除準確度、術后止痛藥使用次數。其中,手術時間定義為從消毒鋪巾開始至切口縫合結束為止;病灶切除時間定義為從切皮開始至切口縫合結束。使用醫學影像信息管理軟件分別在術前及術后1 d X線片測量瘤巢直徑及骨骼切除范圍直徑,兩者比值即為病灶切除準確度。術前及術后3 d、3個月采用VAS評分評估疼痛程度。
1.4 統計學方法
采用SPSS22.0統計軟件進行分析。計量資料采用Shapiro-Wilk檢驗進行正態性檢驗,如符合正態分布,以均數±標準差表示,組間比較采用獨立樣本t檢驗;兩組多時間點比較采用重復測量方差分析,若不滿足球形檢驗,采用Huynh-Feldt法進行校正,同一組別不同時間點間比較采用 Bonferroni 法,同一時間點不同組別間比較采用多因素方差分析;不符合正態分布時以M(Q1,Q3)表示,組間比較采用Mann-Whitney U檢驗;計數資料以例數表示,組間比較采用χ2檢驗;檢驗水準α=0.05。
2 結果
兩組術中均未植骨及使用內固定物。與開放手術組相比,機器人手術組手術時間延長,但術中出血量、透視次數及術后止痛藥使用次數均減少,病灶切除準確度提高,差異均有統計學意義(P<0.05);兩組病灶切除時間差異無統計學意義(P>0.05)。兩組患者術后均獲隨訪,隨訪時間均為3~24個月,中位時間均為12個月。術后兩組均無切口感染、骨折等并發癥發生。隨訪期間均無腫瘤復發。兩組患者術后3 d、3個月時VAS 評分均較術前改善,差異有統計學意義(P<0.05)。術后3 d機器人手術組VAS評分更低,差異有統計學意義(P<0.05),但術后3個月兩組間差異無統計學意義(P > 0.05)。見表2及圖1、2。
圖1
兩組VAS評分變化趨勢
Figure1.
Change trends of VAS scores in the two groups
圖2
機器人手術組患兒,女,11歲,左脛骨中段骨樣骨瘤
a、b. 術前正側位X線片示病灶位于左脛骨中段(箭頭);c. 術前CT示中心瘤巢(箭頭)及周圍硬化骨帶;d. 術中C臂X線機透視;e、f. 術中透視下在機器人操作系統檢查各定位點顯示;g. 術中在操作系統規劃手術路徑;h. 機器人按規劃路徑自動轉動機械臂將導向器指向病灶后,沿導向器置入導針;i、j. 術中正側位透視證實導針尖位于瘤巢中心;k. 術中空心環鉆沿導針切除瘤巢;l. 術中透視證實空心環鉆準確切除瘤巢;m. 術后病理切片可見中心瘤巢組織(HE×40);n、o. 術后1 d正側位X線片示準確切除瘤巢;p、q. 術后6個月正側位X線片
Figure2. A 11-year-old girl with osteoid osteoma of the left mid-tibia in the robot-assisted surgery groupa, b. Preoperative anteroposterior and lateral X-ray films of the left tibia showed that the lesion was located in the middle part of the left tibia (arrow); c. Preoperative CT showed the central tumor nidus (arrow) and surrounding sclerotic bone bands; d. Intraoperative C-arm fluoroscopy; e, f. The positioning points were displayed in the robot’s operating system after fluoroscopy; g. The surgical pathways were planned in the operating system; h. The robot automatically rotated the robot-assisted arm along the planned path to point the guide towards the lesion, and then placed a guide needle along the guide; i, j. Intraoperative anteroposterior and lateral X-ray films showed that the needle tip was located at the center of the tumor nidus; k. The hollow trephine was used to excise the tumor nidus along the guide needle; l. Intraoperative fluoroscopy confirmed that the hollow trephine accurately excised the tumor nidus; m. Pathological section showed the presence of central tumor nidus tissue (HE×40); n, o. Anteroposterior and lateral X-ray films at 1 day after operation showed the accurate resection of the tumor nidus; p, q. Anteroposterior and lateral X-ray films at 6 months after operation
3 討論
骨樣骨瘤發病常見于 5~25 歲人群[8],因瘤巢可產生高出正常水平100~1 000 倍的前列腺素,所以會出現劇烈疼痛[18],夜間痛醒是常見表現[19]。雖然通過非甾體類抗炎藥可改善癥狀[20],但長期疼痛及藥物副作用使患者難以耐受而選擇手術治療。骨樣骨瘤手術方式從常規開放整塊切除逐漸向微創手術發展[21]。既往常規開放手術常面臨的難題是因瘤巢體積較小,往往直徑僅幾毫米,切除第一步需準確定位病灶,在C臂X線機正側位透視后用導針鉆入瘤巢位置,在操作定位針時難以一次性準確定位至瘤巢中心,常需反復多次嘗試。骨科機器人具有精確導航及機械臂操作穩定性強的優勢,精準度達毫米級。操作時經C臂X線機透視、規劃路徑后,機械臂自動定位,沿其導筒置入導針,可以準確到達瘤巢中心;再在通道管保護下用環鉆鉆取瘤巢組織。本研究中,機器人手術組術中透視次數明顯少于開放手術組,病灶切除準確度高于開放手術組,由此避免了術中反復操作并減少了對鄰近正常組織的損傷。同時,機器人手術組術中出血更少,體現出機器人輔助手術更微創的優勢,術后早期疼痛程度更輕、使用止痛藥物用藥次數更少,有助于患者術后康復。
既往骨樣骨瘤切除手術中如瘤巢位于骨皮質內層、髓內,為徹底切除瘤巢,常需擴大切開硬化皮質骨“開窗”,擴大切除范圍可達1.5~2.0 cm[22],對骨質損傷大,增加病理性骨折風險。為減小對皮質骨損傷,采用環形鉆根據瘤巢大小選擇相應型號鉆頭鉆取病灶,是較微創方式[23]。本研究中機器人手術組及開放手術組均采用環形鉆來切除病灶組織,以減小對骨質的損傷,兩組患者在隨訪期間均無腫瘤復發,提示環形鉆切除方式有效。同時,骨科機器人輔助下環形鉆切除骨樣骨瘤的術式具有定位準確、切除創傷小的優勢。
本研究中機器人手術組的不足之處在于手術時間更長,主要為機器人手術需要定位、規劃等準備時間,但病灶切除操作時間與開放手術組無明顯差異。
綜上述,骨科機器人輔助下骨樣骨瘤環形鉆微創切除術雖然手術時間較開放手術更長,但病灶切除更精準,術中出血量更少、術后早期疼痛程度更輕,可以減少止痛藥物使用,具有精準、微創的優勢。但本研究為單中心回顧性分析,納入樣本量較少,隨訪時間較短,需更大樣本的前瞻性、多中心研究來進一步驗證結論。
志謝 四川省醫學科學院·四川省人民醫院病理科楊旭丹副主任醫師在病理診斷方面給予幫助
利益沖突 在課題研究和文章撰寫過程中不存在利益沖突
倫理聲明 研究方案經四川省醫學科學院·四川省人民醫院醫學倫理委員會批準 [倫審(研)2019 年第 290號]
作者貢獻聲明 馮均偉:數據收集、整理、統計分析和文章撰寫;郝鵬、馮均偉、梁偉民:科研設計及實施;唐智:骨科機器人實施及數據收集整理;阿木夫沙、許寶修、何聶正浩:參與病例隨訪與數據收集;郝鵬、王躍:文章整體設計與內容修改及審閱