引用本文: 孟晨, 徐永清, 施榮茂, 浦路橋, 季建安, 姚興友, 周喜宗, 李川. 無影像機器人輔助人工全膝關節置換術在膝骨關節炎合并關節外畸形治療中的早期臨床療效. 中國修復重建外科雜志, 2025, 39(1): 5-12. doi: 10.7507/1002-1892.202408061 復制
版權信息: ?四川大學華西醫院華西期刊社《中國修復重建外科雜志》版權所有,未經授權不得轉載、改編
關節外畸形是指由于既往骨折畸形愈合或骨骼發育異常,導致股骨或脛骨畸形,進而引起下肢力線偏移和膝關節應力分布失衡,最終導致膝骨關節炎的發生、發展[1]。超過5° 的內翻或外翻力線偏移會導致骨關節炎進展風險提高5倍,力線偏移嚴重程度與骨關節炎關節間隙丟失顯著相關[2]。據報道,58%膝骨關節炎會合并關節外畸形[3]。
當膝骨關節炎合并關節外畸形時,恢復下肢力線是手術重點。但手術方法存在爭議,一種方法是先行截骨術矯正關節外畸形,然后同期或二期行人工全膝關節置換術(total knee arthroplasty,TKA);另一種方法是通過TKA中關節內代償性截骨和軟組織平衡來恢復下肢力線[4]。有些學者主張行截骨術聯合TKA治療關節外畸形,可以實現良好的機械對線并減少TKA中的軟組織松解[5]。然而,截骨術會導致更大手術創傷,尤其是截骨術后二期行TKA,對血液動力學儲存較低的高齡患者極為不利[6],術后可能會出現骨不連、截骨感染等并發癥;此外,康復時間和功能恢復時間延長可能導致膝關節功能評分不理想[7]。關節內截骨矯正在一次手術既恢復了下肢力線,又完成了TKA,無需考慮關節外截骨的固定問題。然而,該術式可能導致側副韌帶損傷及屈伸間隙不等風險,畸形的髓腔還會使傳統器械定位困難,從而增加手術難度[8]。
近年來,人工智能輔助導航在膝關節外科的應用逐漸增多,機器人輔助手術通過智能規劃和精準截骨,顯著降低了關節內代償性截骨TKA治療膝骨關節炎伴關節外畸形的難度[9]。目前,國內大多數機器人系統依賴術前CT影像進行導航,對無影像機器人導航系統的研究相對較少,特別是在治療關節外畸形中的應用更鮮有報道。鑒于此,本研究對CORI無影像機器人(Smith&Nephew公司,英國)導航輔助TKA與傳統TKA治療膝骨關節炎伴關節外畸形的臨床療效進行比較。報告如下。
1 臨床資料
1.1 一般資料
患者納入標準:① 合并關節外畸形[8,10-11]的膝骨關節炎,關節外畸形評估標準見圖1;② 影像學表現符合重度膝骨關節炎指征,Kellgren-Lawrence 骨關節炎分級為Ⅲ、Ⅳ級;③ 患者主訴膝關節劇烈疼痛伴嚴重活動受限,且保守治療無效;④ 首次行TKA;⑤ 術后隨訪依從性好。
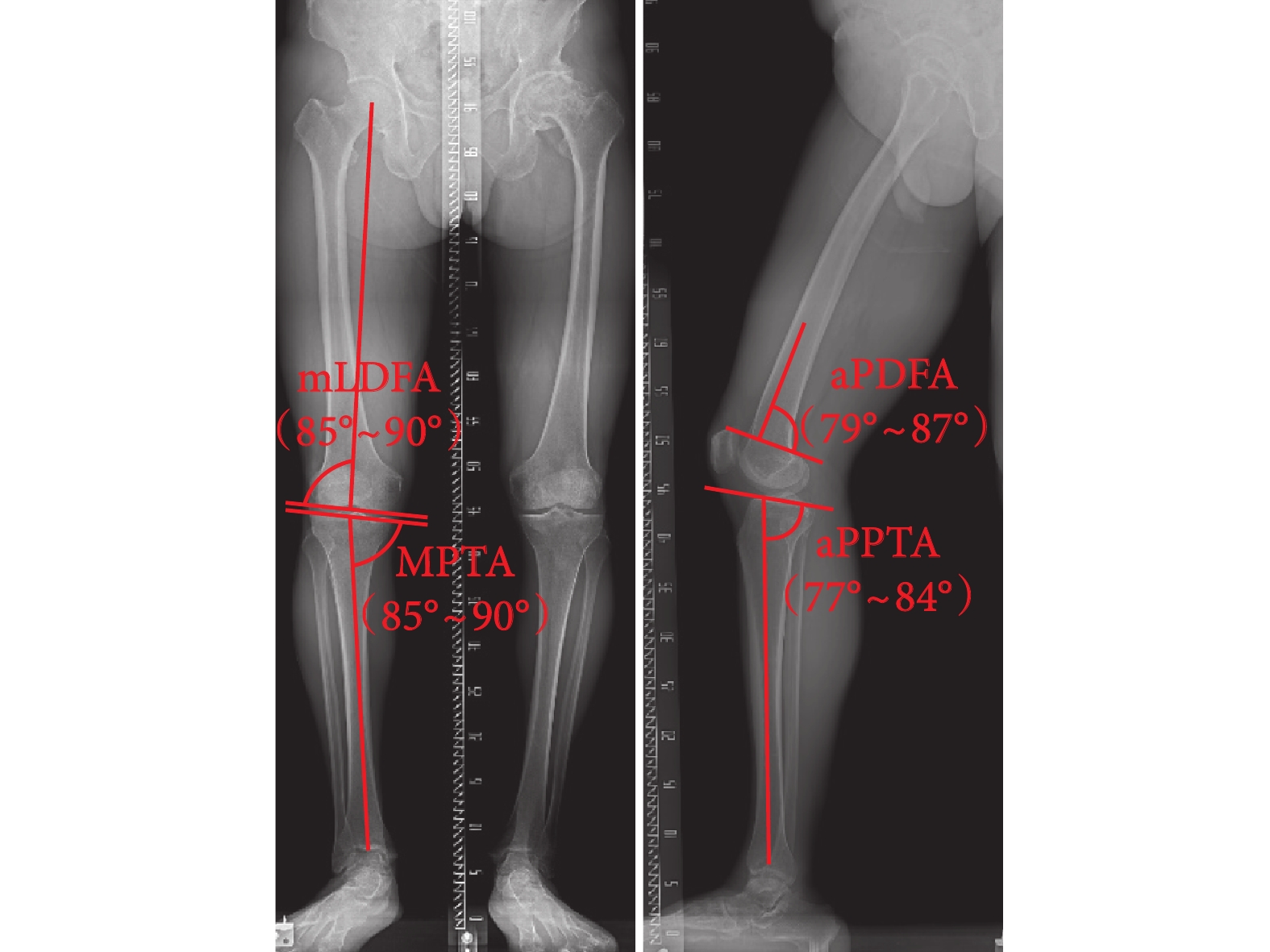 圖1
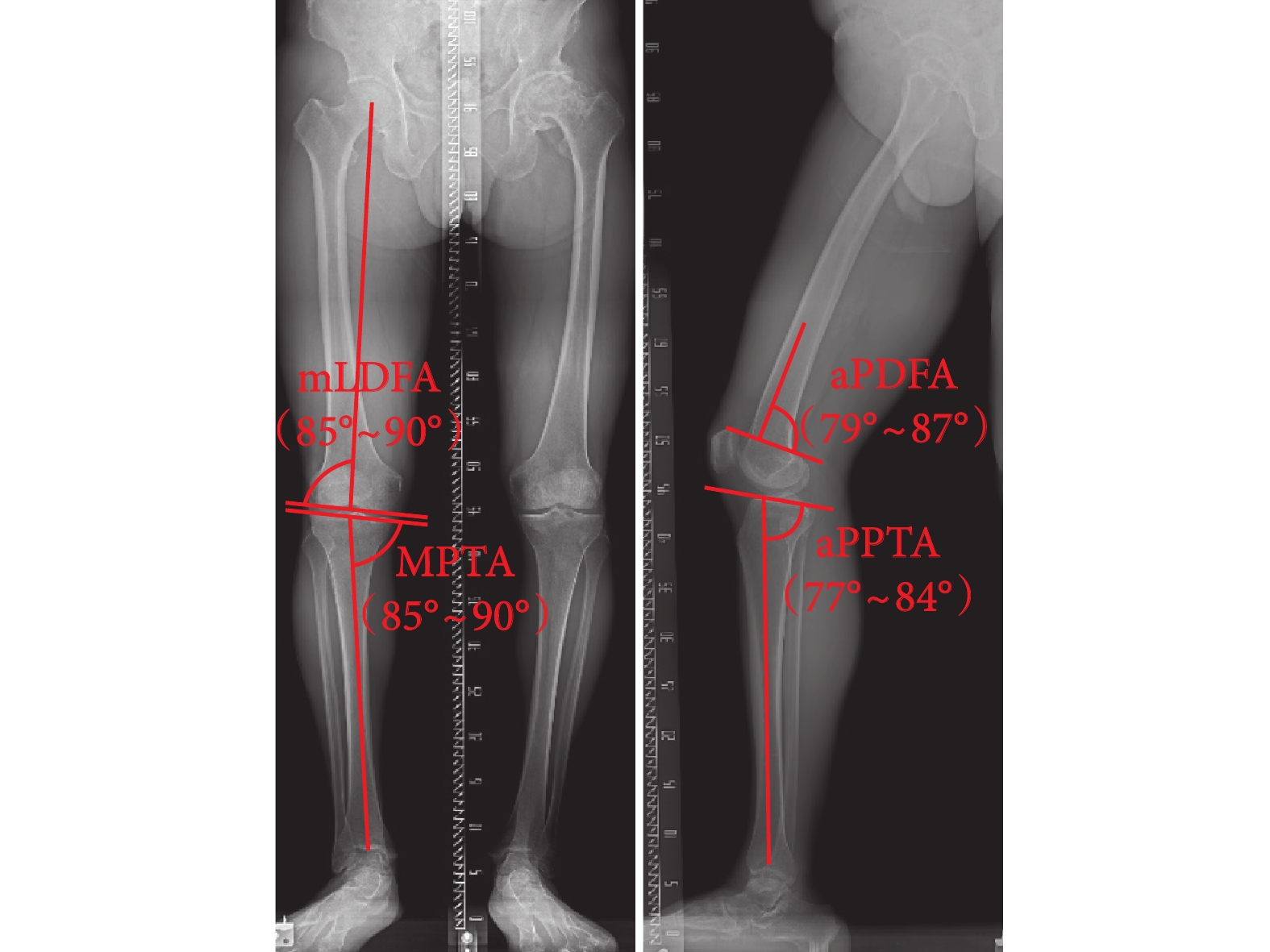
雙下肢全長 X 線片冠狀面和矢狀面評估關節外畸形
圖1
雙下肢全長 X 線片冠狀面和矢狀面評估關節外畸形
mLDFA:股骨遠端外側角 MPTA:脛骨近端內側角 aPDFA:股骨遠端后角 aPPTA:脛骨近端后角
Figure1. Evaluation of extra-articular deformities on coronal and sagittal X-ray films of bilateral lower extremitiesmLDFA: Mechanical lateral distal femoral angle MPTA: Medial proximal tibial angle aPDFA: Anatomic posterior distal femoral angle aPPTA: Anatomic posterior proximal tibial angle
排除標準:① 關節內畸形導致的骨關節炎;② 既往有膝關節手術史、感染史;③ 既往有精神疾病史;④ 類風濕性關節炎、痛風性關節炎等;⑤ 患有其他內科嚴重疾病或全身感染者。
2019年6月—2024年1月中國人民解放軍聯勤保障部隊第九二〇醫院共30例(33膝)患者符合選擇標準納入研究。其中15例(17膝)行CORI無影像機器人導航輔助關節內截骨TKA(機器人組),15例(16膝)行傳統關節內截骨TKA(傳統組)。在2024年1月正式購置CORI機器人設備之前,我院開展的相關研究均為研究者發起的臨床試驗,本研究中11例使用的是試用設備。兩組患者年齡、性別、身體質量指數、患膝側別、關節外畸形角度[8]、畸形位置、畸形類型及術前膝關節活動度、美國膝關節協會評分(KSS)的膝關節評分及功能評分、下肢力線偏移等基線資料比較差異均無統計學意義(P>0.05)。見表1。
1.2 手術方法
所有手術均由同一名高年資醫師主刀完成。患者于全身麻醉下取仰臥位,大腿根部上止血帶,常規消毒、鋪單。取膝前正中皮膚切口,依次切開皮膚、皮下組織,沿股四頭肌肌腱、髕骨內側緣至脛骨結節內側弧形切開髕上囊及關節囊;將髕骨向外側翻轉,屈膝90°,切除增生滑膜組織,殘余半月板和前、后交叉韌帶;清除股骨及脛骨增生骨贅,松解內、外側軟組織。
機器人組:完成術中暴露后,安裝股骨及脛骨的固定針和追蹤器,調整攝像頭方向,使追蹤器在膝關節活動中始終處于攝像頭視野范圍內。在股骨及脛骨不會受到干擾的位置安裝檢查釘,整個手術過程中應用檢查釘確認追蹤器是否移動。依次完成踝關節中心、膝關節中心、髖關節中心、術前機械對準、屈曲范圍、脛骨表面點及股骨表面點的收集配準。配準后進行股骨及脛骨假體植入規劃,以經典力學對線為基準,股骨及脛骨截骨垂直于機械軸;適當調整股骨及脛骨假體內外翻,下肢力線偏移較大者最終下肢力線殘留少許內外翻,在可允許范圍內避免患者因過多下肢力線矯正而產生不適感。隨后拉伸側副韌帶以評估關節間隙和韌帶張力,當關節間隙不平衡時,可進行側副韌帶松解并重新收集松弛度信息,必要時旋轉及平移假體,實現適當的間隙空間。依據手術規劃使用手持式全方位磨鉆分別對脛骨平臺、股骨遠端、股骨髁前方、股骨后髁和股骨斜面截骨,安放假體試模,檢查屈伸間隙是否平衡,下肢力線、患肢伸直狀態及髕骨軌跡是否滿意。取出試模,局部注射“雞尾酒”,使用骨水泥(Heraeus公司,德國)填充。安裝假體后使用術后應力間隙評估功能收集基線和應力間隙,并比較術后間隙與規劃間隙的差異。滿意后沖洗術區,拆除固定針及檢查釘,逐層關閉切口,患肢加壓包扎。見圖2。
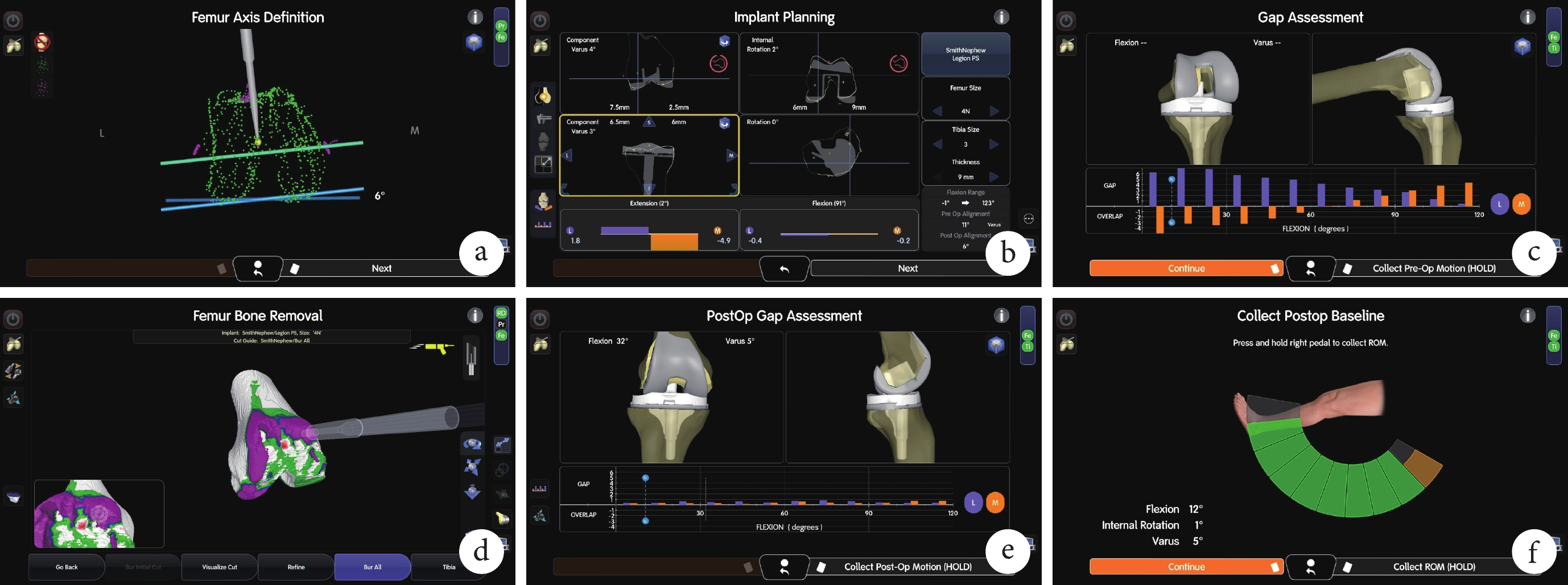 圖2
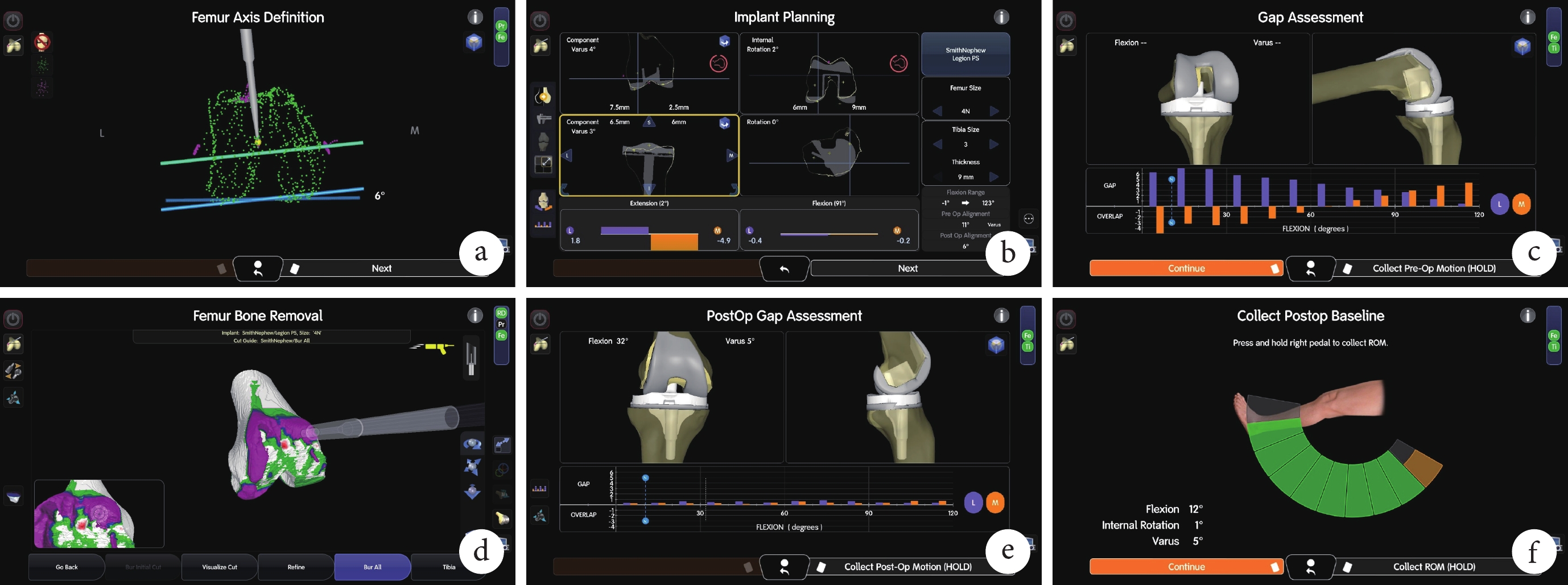
CORI機器人輔助TKA手術操作過程
圖2
CORI機器人輔助TKA手術操作過程
a. 收集股骨自由點并定義股骨軸線;b. 假體植入規劃;c. 拉伸側副韌帶,執行間隙評估;d. 使用磨鉆進行股骨截骨;e. 術后間隙評估;f. 術后下肢對線和活動度收集
Figure2. Surgical procedure for CORI robot-assisted TKAa. Collected femoral landmark points and defining the femoral axis; b. Implant planning for the prosthesis; c. Stretched the collateral ligaments and performed gap assessment; d. Using a reamer for femoral osteotomy; e. Postoperative gap assessment; f. Postoperative lower limb alignment and range of motion assessment
傳統組:術前根據雙下肢全長正位X線片規劃股骨和脛骨截骨位置,股骨進行髓內定位截骨,脛骨進行髓外定位,根據屈伸間隙平衡及關節活動松緊度進行調整,充分松解軟組織,選擇合適的假體及襯墊安裝。其余處理同機器人組。
1.3 術后處理及療效評價指標
兩組術后均予以頭孢呋辛靜脈輸液抗感染;術后8 h口服利伐沙班抗凝;術后3、6 h分別靜脈注射氨甲環酸1 g,采用多模式鎮痛方案。術后第1天開始指導患者扶助行器下地功能鍛煉;術后2周拆線,逐步增加功能鍛煉強度。
記錄并比較兩組患者手術時間及并發癥發生情況,記錄手術前后血紅蛋白水平差異以評估術中失血量[12]。術后1、3、6、12個月門診隨訪。術前及術后6個月,記錄患者膝關節活動度;通過X線片測量機械脛股角(髖關節中點至膝關節中點的連線與膝關節中點至踝關節中點連線的夾角),以180° 為參考標準,機械脛股角與其差值的絕對值則作為下肢力線偏移程度;采用KSS膝關節評分和功能評分評價患者術后膝關節功能。
1.4 統計學方法
采用SPSS24.0統計軟件進行分析。計量資料經Shapiro-Wilk檢驗均符合正態分布,數據以均數±標準差表示,組間比較采用獨立樣本t檢驗,組內手術前后比較采用配對t檢驗;計數資料組間比較采用Fisher確切概率法。檢驗水準取雙側α=0.05。
2 結果
兩組手術時間比較差異無統計學意義(P>0.05);機器人組術中失血量少于傳統組,差異有統計學意義(P<0.05)。兩組患者均獲隨訪,隨訪時間6~12個月,平均8.7個月。患者切口均愈合良好,未發生血栓形成、感染等術后并發癥。術后6個月X線片檢查示,兩組患者假體位置良好,均未出現假體松動或脫位等表現。兩組膝關節活動度、下肢力線偏移及KSS膝關節評分和功能評分均較術前顯著改善,差異有統計學意義(P<0.05);機器人組下肢力線偏移和KSS功能評分手術前后變化值均優于傳統組,差異有統計學意義(P<0.05),其余指標手術前后變化值兩組間比較差異均無統計學意義(P>0.05)。見表2,圖3。
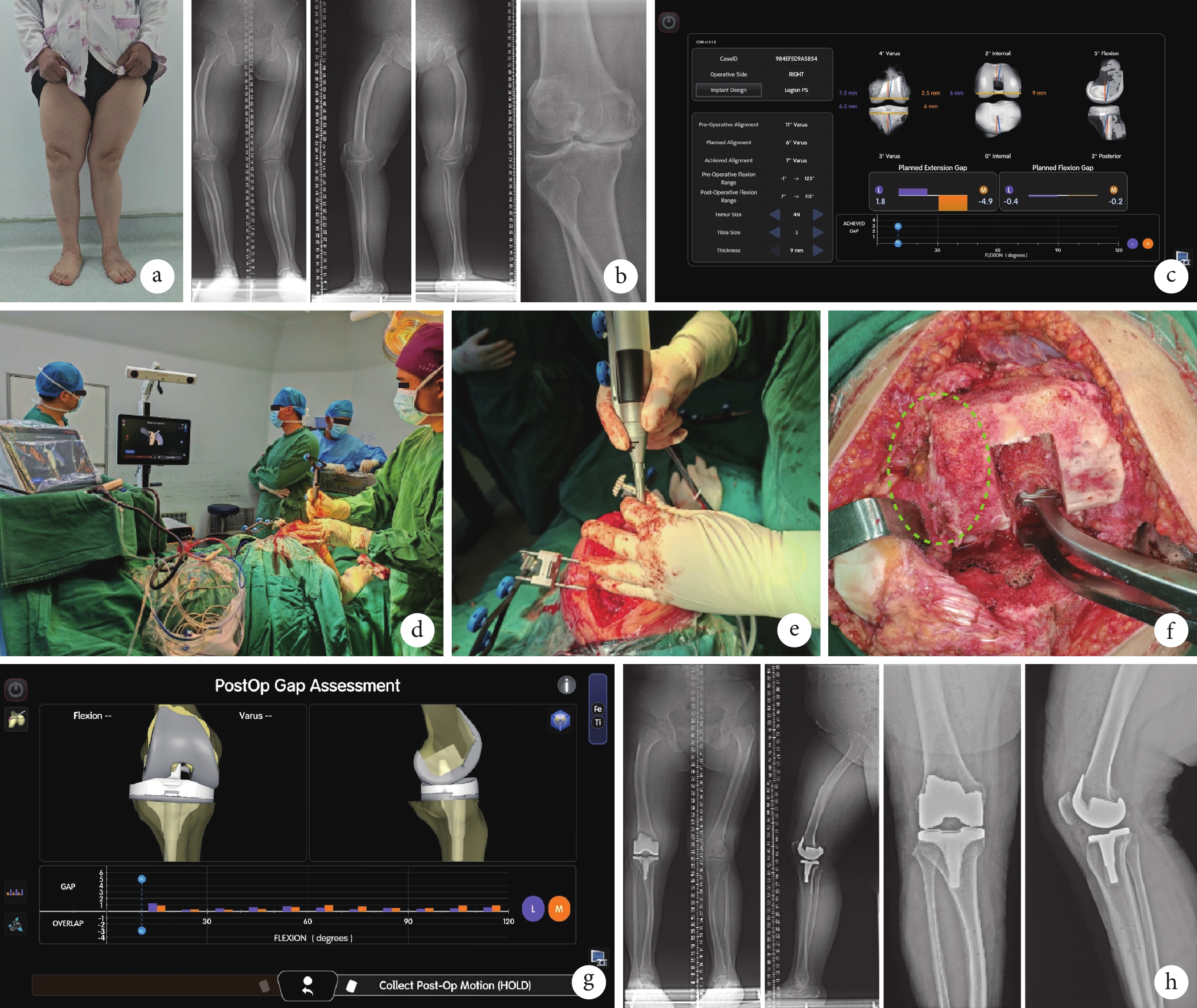 圖3
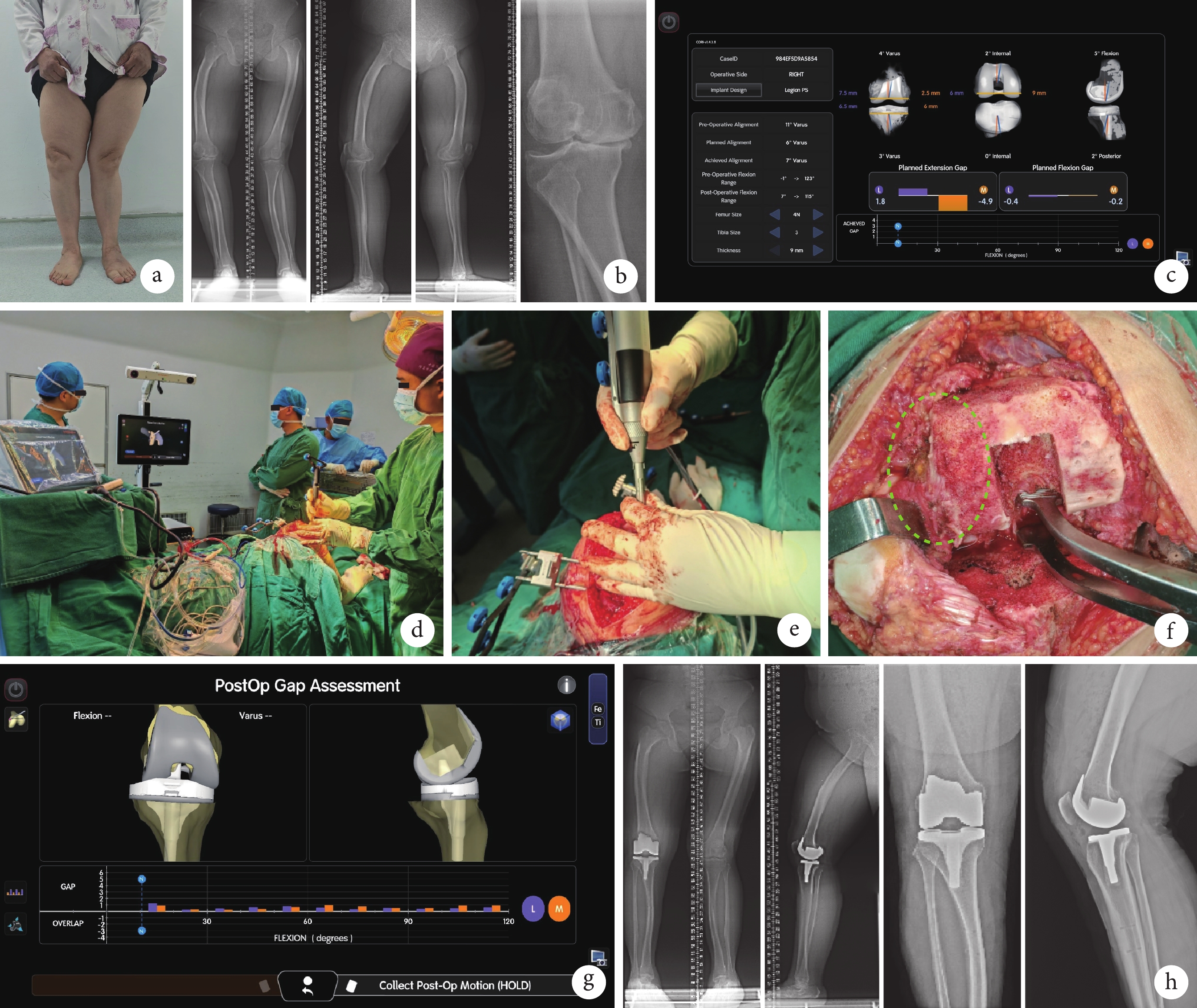
機器人組患者,女,48歲,左膝骨關節炎(Kellgren-Lawrence Ⅳ級)合并關節外畸形
圖3
機器人組患者,女,48歲,左膝骨關節炎(Kellgren-Lawrence Ⅳ級)合并關節外畸形
a. 術前下肢外觀;b. 術前X線片示股骨側關節外畸形角度為35.9°;c. 機器人輔助術中規劃,股骨內翻4°、脛骨假體內翻3°;d. 術中股骨表面點的收集配準;e. 使用磨鉆進行截骨;f. 術中截骨未損傷外側副韌帶(圈內);g. 安裝試模評估屈伸間隙,膝關節0°~120° 屈伸過程中,內外側間隙控制在1 mm左右;h. 術后6個月X線片示下肢力線殘留7° 內翻,假體位置滿意
Figure3. A 48-year-old female patient with left knee osteoarthritis (Kellgren-Lawrence grade Ⅳ) and extra-articular deformity in robot groupa. Preoperative lower limb appearance; b. Preoperative X-ray films showed a femoral lateral joint deformity angle of 35.9°; c. Intraoperative planning with robot assistance, femoral varus 4° and tibial component varus 3°; d. Intraoperative collection and registration of femoral surface points; e. Osteotomy performed using a reamer; f. Intraoperative osteotomy without damaging the lateral collateral ligament (circled); g. Trial component installation to evaluate flexion-extension gaps, with the medial and lateral gaps maintained at approximately 1 mm during knee flexion from 0° to 120°; h. X-ray films at 6 months after operation showed a residual 7° varus alignment of the lower limb, with satisfactory component positioning
3 討論
膝骨關節炎是臨床常見的退行性疾病,當伴隨關節外畸形時,治療難度顯著增加。其中,伴嚴重關節外畸形(如股骨側畸形≥20°,脛骨側畸形≥30°)的膝骨關節炎患者較為少見,通常需通過截骨術矯正[13]。截骨術聯合TKA可改善機械軸,但增加了手術時間、創傷、并發癥風險及延長了康復周期;Lonner等[14]報道術后并發癥發生率為45%,包括截骨不愈合、關節僵硬和急性肺栓塞等。關節內代償性截骨能夠在一次手術中解決畸形并完成TKA,適用于高危老年患者,但可能導致更多韌帶損傷風險,尤其是在畸形角度較大時[15-16];且由于髓腔變形或殘留內固定物,傳統器械定位變得更加困難[17]。另外,傳統TKA術前需要基于X線片上的解剖軸規劃來確定假體位置,當關節外畸形時會由于骨贅形成和肢體軸線角度異常,而出現誤導性的關節運動學表現,這些問題會改變解剖軸,進一步導致傳統TKA治療關節外畸形的技術不夠充分[18-19]。
與傳統TKA中垂直于機械軸的截骨相比,機器人在處理關節外畸形時可以通過精準重建機械軸并進行個性化假體安裝,減少側副韌帶損傷風險,使得其可應用于較嚴重且復雜的關節外畸形[20]。當關節外畸形較嚴重時,機器人在規劃時可通過股骨及脛骨的配合安裝來減少關節內代償性截骨,同時可以在安全范圍內殘留少量下肢力線偏移,進一步減少關節內截骨造成的側副韌帶損傷風險[21]。除了個性化假體安裝,機器人還可以通過機械臂或智能磨鉆實現精準截骨,并且在術中實時評估關節間隙和韌帶張力。本研究以1例機器人組患者為例(圖3),股骨側關節外畸形角度為內翻35.9°,下肢力線內翻23.1°,既往觀點認為股骨畸形在冠狀面上≥20° 時,通過關節內矯正會損傷側副韌帶,建議截骨術矯正畸形。而在CORI機器人輔助下,我們規劃了股骨及脛骨假體個性化安裝,股骨側假體內翻4° 安裝,脛骨假體側內翻3° 安裝,殘留7° 下肢力線內翻,從而使術中截骨及軟組織松解后并未損傷側副韌帶,并獲得良好屈伸間隙和韌帶平衡,最終通過關節內截骨TKA獲得了滿意臨床療效。
基于術前是否行CT檢查,機器人可分為基于影像機器人和無影像機器人[22-23]。一項關于基于影像機器人系統的Meta分析顯示,與傳統TKA相比,機器人具有更精確的機械對準和假體位置,但在活動度改善和并發癥發生率方面無顯著差異,并且因過度輻射暴露而導致不良事件風險增加[24]。與基于影像機器人系統相比,無影像機器人系統減少了患者的輻射暴露及影像學費用,具有良好的應用前景。CORI機器人系統是無影像的手持式半自主機器人系統,無需術前CT掃描,同時允許實時規劃和間隙評估、優化對齊和平衡[25]。該系統在外科醫生控制下,通過手持式磨鉆進行個性化精確截骨,其中徑向截骨精度誤差≤0.1 mm,軸向截骨精度誤差≤0.5 mm。CORI機器人系統采用的手持式尖端磨鉆比傳統鋸片產生的噪聲暴露更低[26]。H?necke等[27]比較了MAKO 機器人、NAVIO 機器人和 CORI 機器人輔助TKA 期間的平均噪聲和峰值聲壓,發現使用磨鉆的NAVIO 機器人和 CORI 機器人在平均噪聲水平方面顯著低于使用鋸片的MAKO機器人,第二代CORI機器人在峰值聲壓水平方面顯著低于第一代NAVIO機器人。整體噪聲的降低可以減少手術室工作人員的聽力損失,減少術后并發癥并降低外科醫生的精神壓力[28]。
本研究使用CORI無影像機器人系統輔助TKA治療合并關節外畸形的膝骨關節炎患者,同時與傳統TKA治療進行對照研究。結果顯示,兩組手術時間相當,但機器人組術中失血量明顯低于傳統組。雖然機器人輔助TKA在術中需要放置和移除檢查釘、術中規劃以及使用機器人系統記錄關節數據,這些步驟增加了手術時間,并且與主刀醫生的學習曲線相關[29],但由于機器人系統能夠精準定位機械軸線,避免了術中髓內定位,并減少了由于畸形導致力線定位困難引起的反復測量下肢力線需求,在一定程度上縮短了手術時間。CORI機器人優化了手術流程,提高了效率和易用性,顯著縮短了學習曲線。具體表現為自動標志點捕捉減少了72%的數據點收集,減少了40%的工作步驟,加快了表面模型生成速度,并使骨性切除速度提高了29%[30]。Weaver等[31]對CORI機器人輔助TKA的手術時間進行分析,發現CORI機器人的學習曲線約為6例手術,在學習階段向熟練階段過渡過程中,術者需要克服骨骼過度切除、軟組織損傷以及機器人硬件或軟件故障等問題。這些因素綜合作用導致兩組患者的手術時間相當。術中失血量較低的原因是傳統TKA術中使用股骨髓內定位法導致髓腔出血,這與避免使用髓內定位器械的既往研究結果一致[32]。另一項研究則將其歸因于通過最大限度減少軟組織創傷和進行更精確的骨切割來保存血管結構[33]。
從膝關節活動度和KSS膝關節評分角度看,機器人輔助TKA和傳統TKA在手術后達到的結果相似,表明機器人輔助技術并未在恢復膝關節活動度及膝關節穩定性方面具有顯著優勢。機器人組的下肢力線偏移及KSS功能評分手術前后變化值優于傳統組,表明當股骨或脛骨畸形時,使用機器人輔助TKA可達到恢復下肢力線、改善膝關節功能的目的。通過在規劃階段精準收集下肢機械對準,同時在膝關節范圍內施加內翻和外翻應力來測量軟組織張力,術者可以根據患者情況個性化選擇假體和定位以及所需截骨量,并且可實時調整規劃提供間隙平衡反饋[34]。除了在規劃期間進行外,還可在試驗階段和軟組織釋放后重復測量軟組織張力,最終實現高度個性化的最佳方案,解決了傳統TKA中定位困難及誤差問題,使患者獲得滿意臨床療效。我們認為,一個TKA手術如果能夠減輕患者疼痛、通過充分的術后對準實現完全穩定的活動能力并改善遠期效果,則是成功的。Rossi等[35]使用無影像機器人輔助 TKA 對30 例嚴重膝關節畸形和相關韌帶松弛進行治療,這些膝關節表現出至少15° 內翻或10° 外翻,在至少 6 個月隨訪中顯示出可靠的影像學結果和臨床結果。本研究結果與之類似,突顯了無影像機器人輔助TKA處理膝關節畸形的優勢。首先,該技術能夠減少患者術前輻射暴露,提高手術便捷性,縮短手術準備時間。其次,無影像機器人能夠實現個性化術中規劃,特別是對于嚴重畸形患者,可在安全范圍內殘留少許畸形,避免過度截骨矯正可能帶來的韌帶不穩定及軟組織損傷。最后,實時調整規劃與間隙平衡反饋的功能,對關節外畸形患者的關節內代償性截骨提供了更加精確的術中軟組織平衡調整。
綜上述,與傳統TKA相比,無影像機器人輔助TKA治療伴關節外畸形的膝骨關節炎患者,術中失血量更少,術后下肢力線重建更精準,早期臨床療效更佳,具有良好應用前景。但本研究病例數較少、隨訪時間較短,仍需要更大規模研究和更長時間隨訪來驗證本研究結論。
利益沖突 在課題研究和文章撰寫過程中不存在利益沖突;經費支持沒有影響文章觀點和對研究數據客觀結果的統計分析及其報道
倫理聲明 研究方案經中國人民解放軍聯勤保障部隊第九二〇醫院倫理委員會批準[倫審 2021-069(科)-02]
作者貢獻聲明 孟晨:文章構思、研究整體設計及論文撰寫;徐永清、施榮茂、浦路橋:參與研究設計并整理研究數據;季建安、姚興友、周喜宗:數據收集及統計分析;李川:研究設計指導
關節外畸形是指由于既往骨折畸形愈合或骨骼發育異常,導致股骨或脛骨畸形,進而引起下肢力線偏移和膝關節應力分布失衡,最終導致膝骨關節炎的發生、發展[1]。超過5° 的內翻或外翻力線偏移會導致骨關節炎進展風險提高5倍,力線偏移嚴重程度與骨關節炎關節間隙丟失顯著相關[2]。據報道,58%膝骨關節炎會合并關節外畸形[3]。
當膝骨關節炎合并關節外畸形時,恢復下肢力線是手術重點。但手術方法存在爭議,一種方法是先行截骨術矯正關節外畸形,然后同期或二期行人工全膝關節置換術(total knee arthroplasty,TKA);另一種方法是通過TKA中關節內代償性截骨和軟組織平衡來恢復下肢力線[4]。有些學者主張行截骨術聯合TKA治療關節外畸形,可以實現良好的機械對線并減少TKA中的軟組織松解[5]。然而,截骨術會導致更大手術創傷,尤其是截骨術后二期行TKA,對血液動力學儲存較低的高齡患者極為不利[6],術后可能會出現骨不連、截骨感染等并發癥;此外,康復時間和功能恢復時間延長可能導致膝關節功能評分不理想[7]。關節內截骨矯正在一次手術既恢復了下肢力線,又完成了TKA,無需考慮關節外截骨的固定問題。然而,該術式可能導致側副韌帶損傷及屈伸間隙不等風險,畸形的髓腔還會使傳統器械定位困難,從而增加手術難度[8]。
近年來,人工智能輔助導航在膝關節外科的應用逐漸增多,機器人輔助手術通過智能規劃和精準截骨,顯著降低了關節內代償性截骨TKA治療膝骨關節炎伴關節外畸形的難度[9]。目前,國內大多數機器人系統依賴術前CT影像進行導航,對無影像機器人導航系統的研究相對較少,特別是在治療關節外畸形中的應用更鮮有報道。鑒于此,本研究對CORI無影像機器人(Smith&Nephew公司,英國)導航輔助TKA與傳統TKA治療膝骨關節炎伴關節外畸形的臨床療效進行比較。報告如下。
1 臨床資料
1.1 一般資料
患者納入標準:① 合并關節外畸形[8,10-11]的膝骨關節炎,關節外畸形評估標準見圖1;② 影像學表現符合重度膝骨關節炎指征,Kellgren-Lawrence 骨關節炎分級為Ⅲ、Ⅳ級;③ 患者主訴膝關節劇烈疼痛伴嚴重活動受限,且保守治療無效;④ 首次行TKA;⑤ 術后隨訪依從性好。
圖1
雙下肢全長 X 線片冠狀面和矢狀面評估關節外畸形
mLDFA:股骨遠端外側角 MPTA:脛骨近端內側角 aPDFA:股骨遠端后角 aPPTA:脛骨近端后角
Figure1. Evaluation of extra-articular deformities on coronal and sagittal X-ray films of bilateral lower extremitiesmLDFA: Mechanical lateral distal femoral angle MPTA: Medial proximal tibial angle aPDFA: Anatomic posterior distal femoral angle aPPTA: Anatomic posterior proximal tibial angle
排除標準:① 關節內畸形導致的骨關節炎;② 既往有膝關節手術史、感染史;③ 既往有精神疾病史;④ 類風濕性關節炎、痛風性關節炎等;⑤ 患有其他內科嚴重疾病或全身感染者。
2019年6月—2024年1月中國人民解放軍聯勤保障部隊第九二〇醫院共30例(33膝)患者符合選擇標準納入研究。其中15例(17膝)行CORI無影像機器人導航輔助關節內截骨TKA(機器人組),15例(16膝)行傳統關節內截骨TKA(傳統組)。在2024年1月正式購置CORI機器人設備之前,我院開展的相關研究均為研究者發起的臨床試驗,本研究中11例使用的是試用設備。兩組患者年齡、性別、身體質量指數、患膝側別、關節外畸形角度[8]、畸形位置、畸形類型及術前膝關節活動度、美國膝關節協會評分(KSS)的膝關節評分及功能評分、下肢力線偏移等基線資料比較差異均無統計學意義(P>0.05)。見表1。
1.2 手術方法
所有手術均由同一名高年資醫師主刀完成。患者于全身麻醉下取仰臥位,大腿根部上止血帶,常規消毒、鋪單。取膝前正中皮膚切口,依次切開皮膚、皮下組織,沿股四頭肌肌腱、髕骨內側緣至脛骨結節內側弧形切開髕上囊及關節囊;將髕骨向外側翻轉,屈膝90°,切除增生滑膜組織,殘余半月板和前、后交叉韌帶;清除股骨及脛骨增生骨贅,松解內、外側軟組織。
機器人組:完成術中暴露后,安裝股骨及脛骨的固定針和追蹤器,調整攝像頭方向,使追蹤器在膝關節活動中始終處于攝像頭視野范圍內。在股骨及脛骨不會受到干擾的位置安裝檢查釘,整個手術過程中應用檢查釘確認追蹤器是否移動。依次完成踝關節中心、膝關節中心、髖關節中心、術前機械對準、屈曲范圍、脛骨表面點及股骨表面點的收集配準。配準后進行股骨及脛骨假體植入規劃,以經典力學對線為基準,股骨及脛骨截骨垂直于機械軸;適當調整股骨及脛骨假體內外翻,下肢力線偏移較大者最終下肢力線殘留少許內外翻,在可允許范圍內避免患者因過多下肢力線矯正而產生不適感。隨后拉伸側副韌帶以評估關節間隙和韌帶張力,當關節間隙不平衡時,可進行側副韌帶松解并重新收集松弛度信息,必要時旋轉及平移假體,實現適當的間隙空間。依據手術規劃使用手持式全方位磨鉆分別對脛骨平臺、股骨遠端、股骨髁前方、股骨后髁和股骨斜面截骨,安放假體試模,檢查屈伸間隙是否平衡,下肢力線、患肢伸直狀態及髕骨軌跡是否滿意。取出試模,局部注射“雞尾酒”,使用骨水泥(Heraeus公司,德國)填充。安裝假體后使用術后應力間隙評估功能收集基線和應力間隙,并比較術后間隙與規劃間隙的差異。滿意后沖洗術區,拆除固定針及檢查釘,逐層關閉切口,患肢加壓包扎。見圖2。
圖2
CORI機器人輔助TKA手術操作過程
a. 收集股骨自由點并定義股骨軸線;b. 假體植入規劃;c. 拉伸側副韌帶,執行間隙評估;d. 使用磨鉆進行股骨截骨;e. 術后間隙評估;f. 術后下肢對線和活動度收集
Figure2. Surgical procedure for CORI robot-assisted TKAa. Collected femoral landmark points and defining the femoral axis; b. Implant planning for the prosthesis; c. Stretched the collateral ligaments and performed gap assessment; d. Using a reamer for femoral osteotomy; e. Postoperative gap assessment; f. Postoperative lower limb alignment and range of motion assessment
傳統組:術前根據雙下肢全長正位X線片規劃股骨和脛骨截骨位置,股骨進行髓內定位截骨,脛骨進行髓外定位,根據屈伸間隙平衡及關節活動松緊度進行調整,充分松解軟組織,選擇合適的假體及襯墊安裝。其余處理同機器人組。
1.3 術后處理及療效評價指標
兩組術后均予以頭孢呋辛靜脈輸液抗感染;術后8 h口服利伐沙班抗凝;術后3、6 h分別靜脈注射氨甲環酸1 g,采用多模式鎮痛方案。術后第1天開始指導患者扶助行器下地功能鍛煉;術后2周拆線,逐步增加功能鍛煉強度。
記錄并比較兩組患者手術時間及并發癥發生情況,記錄手術前后血紅蛋白水平差異以評估術中失血量[12]。術后1、3、6、12個月門診隨訪。術前及術后6個月,記錄患者膝關節活動度;通過X線片測量機械脛股角(髖關節中點至膝關節中點的連線與膝關節中點至踝關節中點連線的夾角),以180° 為參考標準,機械脛股角與其差值的絕對值則作為下肢力線偏移程度;采用KSS膝關節評分和功能評分評價患者術后膝關節功能。
1.4 統計學方法
采用SPSS24.0統計軟件進行分析。計量資料經Shapiro-Wilk檢驗均符合正態分布,數據以均數±標準差表示,組間比較采用獨立樣本t檢驗,組內手術前后比較采用配對t檢驗;計數資料組間比較采用Fisher確切概率法。檢驗水準取雙側α=0.05。
2 結果
兩組手術時間比較差異無統計學意義(P>0.05);機器人組術中失血量少于傳統組,差異有統計學意義(P<0.05)。兩組患者均獲隨訪,隨訪時間6~12個月,平均8.7個月。患者切口均愈合良好,未發生血栓形成、感染等術后并發癥。術后6個月X線片檢查示,兩組患者假體位置良好,均未出現假體松動或脫位等表現。兩組膝關節活動度、下肢力線偏移及KSS膝關節評分和功能評分均較術前顯著改善,差異有統計學意義(P<0.05);機器人組下肢力線偏移和KSS功能評分手術前后變化值均優于傳統組,差異有統計學意義(P<0.05),其余指標手術前后變化值兩組間比較差異均無統計學意義(P>0.05)。見表2,圖3。
圖3
機器人組患者,女,48歲,左膝骨關節炎(Kellgren-Lawrence Ⅳ級)合并關節外畸形
a. 術前下肢外觀;b. 術前X線片示股骨側關節外畸形角度為35.9°;c. 機器人輔助術中規劃,股骨內翻4°、脛骨假體內翻3°;d. 術中股骨表面點的收集配準;e. 使用磨鉆進行截骨;f. 術中截骨未損傷外側副韌帶(圈內);g. 安裝試模評估屈伸間隙,膝關節0°~120° 屈伸過程中,內外側間隙控制在1 mm左右;h. 術后6個月X線片示下肢力線殘留7° 內翻,假體位置滿意
Figure3. A 48-year-old female patient with left knee osteoarthritis (Kellgren-Lawrence grade Ⅳ) and extra-articular deformity in robot groupa. Preoperative lower limb appearance; b. Preoperative X-ray films showed a femoral lateral joint deformity angle of 35.9°; c. Intraoperative planning with robot assistance, femoral varus 4° and tibial component varus 3°; d. Intraoperative collection and registration of femoral surface points; e. Osteotomy performed using a reamer; f. Intraoperative osteotomy without damaging the lateral collateral ligament (circled); g. Trial component installation to evaluate flexion-extension gaps, with the medial and lateral gaps maintained at approximately 1 mm during knee flexion from 0° to 120°; h. X-ray films at 6 months after operation showed a residual 7° varus alignment of the lower limb, with satisfactory component positioning
3 討論
膝骨關節炎是臨床常見的退行性疾病,當伴隨關節外畸形時,治療難度顯著增加。其中,伴嚴重關節外畸形(如股骨側畸形≥20°,脛骨側畸形≥30°)的膝骨關節炎患者較為少見,通常需通過截骨術矯正[13]。截骨術聯合TKA可改善機械軸,但增加了手術時間、創傷、并發癥風險及延長了康復周期;Lonner等[14]報道術后并發癥發生率為45%,包括截骨不愈合、關節僵硬和急性肺栓塞等。關節內代償性截骨能夠在一次手術中解決畸形并完成TKA,適用于高危老年患者,但可能導致更多韌帶損傷風險,尤其是在畸形角度較大時[15-16];且由于髓腔變形或殘留內固定物,傳統器械定位變得更加困難[17]。另外,傳統TKA術前需要基于X線片上的解剖軸規劃來確定假體位置,當關節外畸形時會由于骨贅形成和肢體軸線角度異常,而出現誤導性的關節運動學表現,這些問題會改變解剖軸,進一步導致傳統TKA治療關節外畸形的技術不夠充分[18-19]。
與傳統TKA中垂直于機械軸的截骨相比,機器人在處理關節外畸形時可以通過精準重建機械軸并進行個性化假體安裝,減少側副韌帶損傷風險,使得其可應用于較嚴重且復雜的關節外畸形[20]。當關節外畸形較嚴重時,機器人在規劃時可通過股骨及脛骨的配合安裝來減少關節內代償性截骨,同時可以在安全范圍內殘留少量下肢力線偏移,進一步減少關節內截骨造成的側副韌帶損傷風險[21]。除了個性化假體安裝,機器人還可以通過機械臂或智能磨鉆實現精準截骨,并且在術中實時評估關節間隙和韌帶張力。本研究以1例機器人組患者為例(圖3),股骨側關節外畸形角度為內翻35.9°,下肢力線內翻23.1°,既往觀點認為股骨畸形在冠狀面上≥20° 時,通過關節內矯正會損傷側副韌帶,建議截骨術矯正畸形。而在CORI機器人輔助下,我們規劃了股骨及脛骨假體個性化安裝,股骨側假體內翻4° 安裝,脛骨假體側內翻3° 安裝,殘留7° 下肢力線內翻,從而使術中截骨及軟組織松解后并未損傷側副韌帶,并獲得良好屈伸間隙和韌帶平衡,最終通過關節內截骨TKA獲得了滿意臨床療效。
基于術前是否行CT檢查,機器人可分為基于影像機器人和無影像機器人[22-23]。一項關于基于影像機器人系統的Meta分析顯示,與傳統TKA相比,機器人具有更精確的機械對準和假體位置,但在活動度改善和并發癥發生率方面無顯著差異,并且因過度輻射暴露而導致不良事件風險增加[24]。與基于影像機器人系統相比,無影像機器人系統減少了患者的輻射暴露及影像學費用,具有良好的應用前景。CORI機器人系統是無影像的手持式半自主機器人系統,無需術前CT掃描,同時允許實時規劃和間隙評估、優化對齊和平衡[25]。該系統在外科醫生控制下,通過手持式磨鉆進行個性化精確截骨,其中徑向截骨精度誤差≤0.1 mm,軸向截骨精度誤差≤0.5 mm。CORI機器人系統采用的手持式尖端磨鉆比傳統鋸片產生的噪聲暴露更低[26]。H?necke等[27]比較了MAKO 機器人、NAVIO 機器人和 CORI 機器人輔助TKA 期間的平均噪聲和峰值聲壓,發現使用磨鉆的NAVIO 機器人和 CORI 機器人在平均噪聲水平方面顯著低于使用鋸片的MAKO機器人,第二代CORI機器人在峰值聲壓水平方面顯著低于第一代NAVIO機器人。整體噪聲的降低可以減少手術室工作人員的聽力損失,減少術后并發癥并降低外科醫生的精神壓力[28]。
本研究使用CORI無影像機器人系統輔助TKA治療合并關節外畸形的膝骨關節炎患者,同時與傳統TKA治療進行對照研究。結果顯示,兩組手術時間相當,但機器人組術中失血量明顯低于傳統組。雖然機器人輔助TKA在術中需要放置和移除檢查釘、術中規劃以及使用機器人系統記錄關節數據,這些步驟增加了手術時間,并且與主刀醫生的學習曲線相關[29],但由于機器人系統能夠精準定位機械軸線,避免了術中髓內定位,并減少了由于畸形導致力線定位困難引起的反復測量下肢力線需求,在一定程度上縮短了手術時間。CORI機器人優化了手術流程,提高了效率和易用性,顯著縮短了學習曲線。具體表現為自動標志點捕捉減少了72%的數據點收集,減少了40%的工作步驟,加快了表面模型生成速度,并使骨性切除速度提高了29%[30]。Weaver等[31]對CORI機器人輔助TKA的手術時間進行分析,發現CORI機器人的學習曲線約為6例手術,在學習階段向熟練階段過渡過程中,術者需要克服骨骼過度切除、軟組織損傷以及機器人硬件或軟件故障等問題。這些因素綜合作用導致兩組患者的手術時間相當。術中失血量較低的原因是傳統TKA術中使用股骨髓內定位法導致髓腔出血,這與避免使用髓內定位器械的既往研究結果一致[32]。另一項研究則將其歸因于通過最大限度減少軟組織創傷和進行更精確的骨切割來保存血管結構[33]。
從膝關節活動度和KSS膝關節評分角度看,機器人輔助TKA和傳統TKA在手術后達到的結果相似,表明機器人輔助技術并未在恢復膝關節活動度及膝關節穩定性方面具有顯著優勢。機器人組的下肢力線偏移及KSS功能評分手術前后變化值優于傳統組,表明當股骨或脛骨畸形時,使用機器人輔助TKA可達到恢復下肢力線、改善膝關節功能的目的。通過在規劃階段精準收集下肢機械對準,同時在膝關節范圍內施加內翻和外翻應力來測量軟組織張力,術者可以根據患者情況個性化選擇假體和定位以及所需截骨量,并且可實時調整規劃提供間隙平衡反饋[34]。除了在規劃期間進行外,還可在試驗階段和軟組織釋放后重復測量軟組織張力,最終實現高度個性化的最佳方案,解決了傳統TKA中定位困難及誤差問題,使患者獲得滿意臨床療效。我們認為,一個TKA手術如果能夠減輕患者疼痛、通過充分的術后對準實現完全穩定的活動能力并改善遠期效果,則是成功的。Rossi等[35]使用無影像機器人輔助 TKA 對30 例嚴重膝關節畸形和相關韌帶松弛進行治療,這些膝關節表現出至少15° 內翻或10° 外翻,在至少 6 個月隨訪中顯示出可靠的影像學結果和臨床結果。本研究結果與之類似,突顯了無影像機器人輔助TKA處理膝關節畸形的優勢。首先,該技術能夠減少患者術前輻射暴露,提高手術便捷性,縮短手術準備時間。其次,無影像機器人能夠實現個性化術中規劃,特別是對于嚴重畸形患者,可在安全范圍內殘留少許畸形,避免過度截骨矯正可能帶來的韌帶不穩定及軟組織損傷。最后,實時調整規劃與間隙平衡反饋的功能,對關節外畸形患者的關節內代償性截骨提供了更加精確的術中軟組織平衡調整。
綜上述,與傳統TKA相比,無影像機器人輔助TKA治療伴關節外畸形的膝骨關節炎患者,術中失血量更少,術后下肢力線重建更精準,早期臨床療效更佳,具有良好應用前景。但本研究病例數較少、隨訪時間較短,仍需要更大規模研究和更長時間隨訪來驗證本研究結論。
利益沖突 在課題研究和文章撰寫過程中不存在利益沖突;經費支持沒有影響文章觀點和對研究數據客觀結果的統計分析及其報道
倫理聲明 研究方案經中國人民解放軍聯勤保障部隊第九二〇醫院倫理委員會批準[倫審 2021-069(科)-02]
作者貢獻聲明 孟晨:文章構思、研究整體設計及論文撰寫;徐永清、施榮茂、浦路橋:參與研究設計并整理研究數據;季建安、姚興友、周喜宗:數據收集及統計分析;李川:研究設計指導