版權信息: ?四川大學華西醫院華西期刊社《中國修復重建外科雜志》版權所有,未經授權不得轉載、改編
股骨干骨折是股骨小轉子下2~5 cm至股骨髁上2~5 cm的股骨骨干骨折,常由高暴力損傷導致,好發生于青年人群,約占成人全身骨折的6%[1-2]。閉合交鎖髓內釘是目前臨床上治療股骨干骨折最常用方式[3-6]。其優勢在于手術創傷小、彈性固定以及患者能夠早期進行功能鍛煉等[6-9]。但其劣勢也不容忽視,例如術中透視對患者及術者造成顯著輻射損傷[10-12];髓內釘遠端鎖定比較困難,需要手術醫生在大量透視下才能完成[13-14];反復鉆孔導致股骨皮質破壞,降低了鎖釘把持力而引起鎖釘失效等。如何提高股骨髓內釘的手術效率,減少醫患輻射損傷已成為研究熱點。近年來,隨著手術機器人在臨床中的應用越來越廣泛,有研究者提出可以用機器人輔助來提高股骨髓內釘遠端鎖定效率[15]。鑒于此,中國人民解放軍總醫院骨科團隊自主研發了一款智能骨科機器人,本研究擬通過標本模擬實驗,探討此智能骨科機器人能否提高股骨髓內釘遠端鎖定效率,減少手術醫生和患者所受輻射損傷。報告如下。
1 資料與方法
1.1 研究對象及分組
成人尸體股骨標本32個,由陸軍軍醫大學解剖教研室提供。標本均無肉眼可見的骨折、畸形、腫瘤等,經去除軟組織和干燥處理。按照隨機數字表法將股骨標本分為實驗組和對照組,每組16個。實驗組采用智能骨科機器人輔助股骨髓內釘遠端鎖孔鎖定,對照組采用傳統X線透視下手工鎖定。本研究所用髓內釘為TWG股骨順行髓內釘(山東威高骨科材料股份有限公司),X線透視設備為Arcadic Varic術中移動C臂X線機(Siemens公司,德國)。智能骨科機器人為中國人民解放軍總醫院骨科團隊自主研發產品,主要硬件結構由六自由度定位機械臂、末端導向套筒、紅外線導航系統組成,機械臂的最大空間運動范圍為1 300 mm,可實現的定位精度為1 mm和1°。
1.2 研究方法
兩組實驗由同一名住院醫師完成。預先將髓內釘植入股骨標本內,入釘點為股骨大轉子尖端,經過開口、擴髓后植入股骨髓內釘,髓內釘的遠端不超過股骨髕骨切跡上緣;然后將股骨標本用夾鉗固定于實驗臺后進行下一步遠端鎖孔的鎖定。
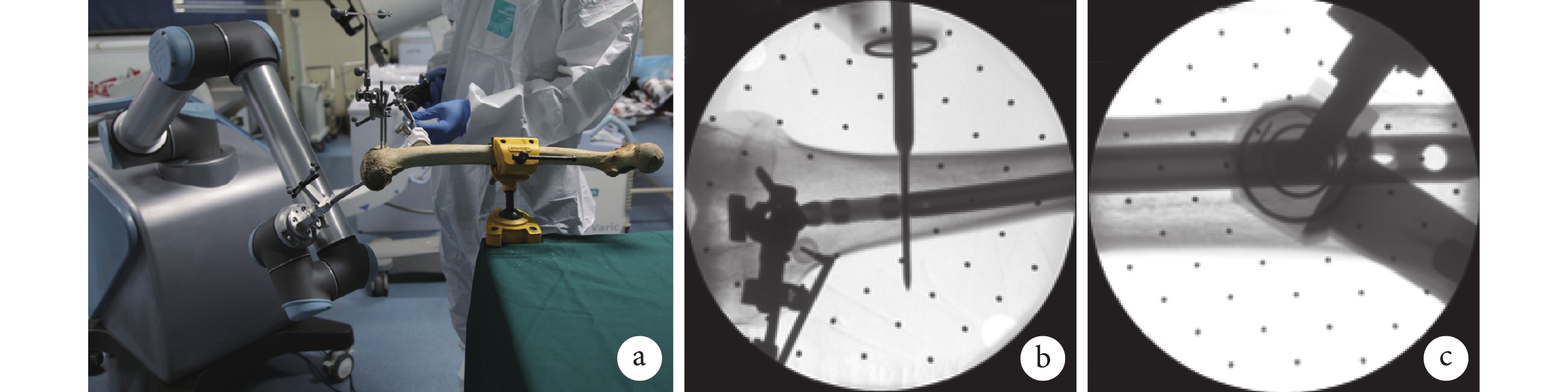
實驗組手術流程:① 定位機械臂擺放至術區,安裝末端導向套筒,導航系統開機;② 在股骨遠端安裝參考架;③ 利用C臂X線機攝髓內釘遠端鎖定孔的正、側位X線片,并自動導入導航軟件中;④ 在軟件中識別髓內釘鎖定孔位置,自動進行定位運動的路徑規劃;⑤ 下達指令后,機械臂沿著路徑規劃自動運動,直至末端導向套筒軸線與髓內釘鎖定孔軸線完全重合;⑥ 醫生沿著末端導向套筒手動進行鉆孔,置入直徑4 mm鎖釘導針;⑦ 再次攝正側位X線片,驗證導針是否在鎖定孔內。見圖1。
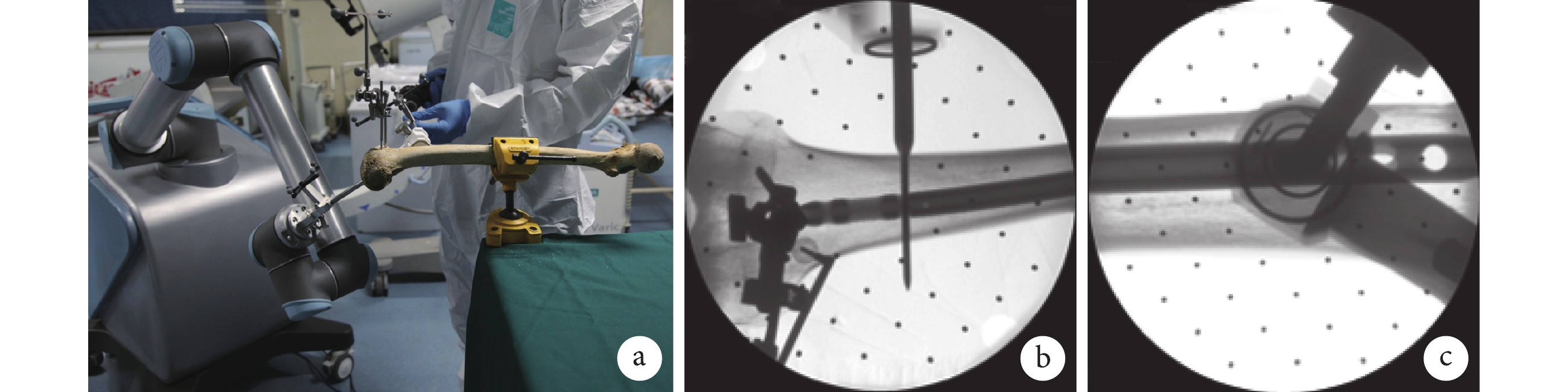 圖1
實驗組手術操作
圖1
實驗組手術操作
a. 智能骨科機器人輔助下髓內釘遠端鎖孔鎖定場景圖;b、c. 導針穿透遠端鎖定孔后正、側位X線片
Figure1. Surgical operation of the experimental groupa. Scene of distal locking of intramedullary nail assisted by intelligent orthopedic robot; b, c. Anteroposterior and lateral X-ray films after the guide pin penetrated the distal locking hole
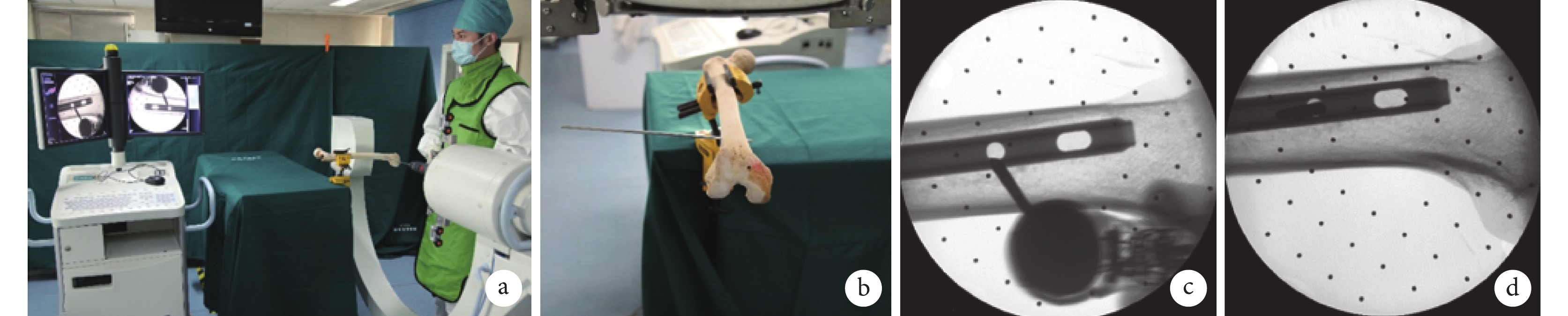
對照組手術流程:① 醫生穿上鉛衣防護;② 助手將C臂X線機擺放至拍攝股骨遠端側位片位置,調整方向至鎖定孔呈像為正圓形;③ 將4 mm鎖釘導針安裝于電鉆上,根據經驗將導針尖端置于鎖孔在外側皮質骨投影的大概位置;④ C臂X線機透視下將導針尖端調整至鎖定孔于骨皮質的投影中心;⑤ 鉆開骨皮質,進入鎖孔;⑥ C臂X線機透視確認方向無誤后,繼續鉆孔直至通過股骨內側皮質;⑤ 攝正側位X線片驗證導針是否在鎖定孔內。見圖2。
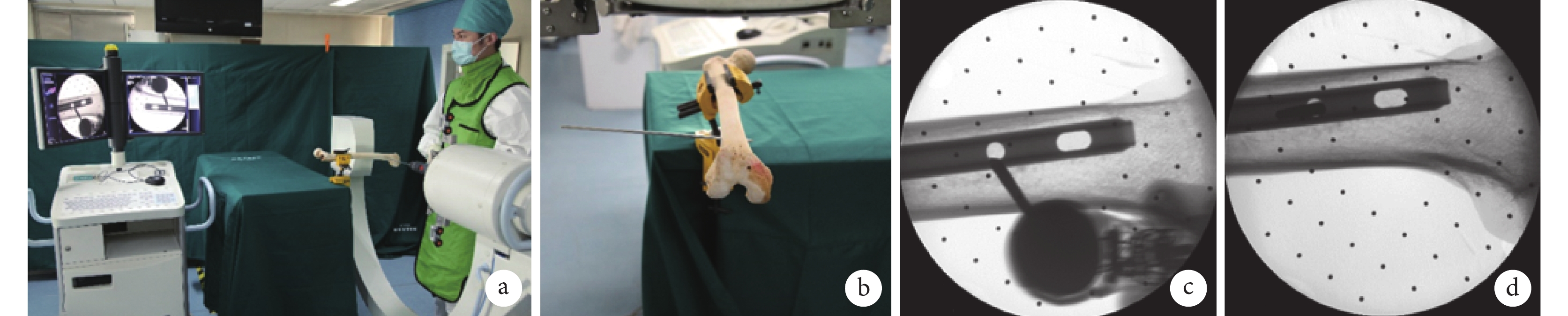 圖2
對照組手術操作
圖2
對照組手術操作
a. 傳統X線透視下手工鎖定場景圖;b. 手動將導針穿透遠端鎖定孔后;c. 手工鎖定時導針穿入前的定位X線片;d. 導針穿透遠端鎖定孔后側位X線片
Figure2. Surgical operation of the control groupa. Scene of manual locking under traditional X-ray fluoroscopy; b. After manually penetrating the guide pin through the distal locking hole; c. Localization X-ray film before inserting the guide pin during manual locking; d. Lateral X-ray film after the guide pin penetrated the distal locking hole
1.3 觀察指標
記錄并比較兩組以下指標:① 鎖定時間:兩組均從遠端鎖定孔的第1次透視開始計時,至導針穿過遠端鎖定孔,并經過透視確認鎖釘導針穿過遠端鎖定孔且穿透內側皮質結束;實驗組再加上參考架安裝時間。② 透視次數:鎖定時間內C臂X線機拍攝X線片的次數。③ 首次鎖定成功率:第1次鉆孔時導針成功穿過鎖定孔的概率。
1.4 統計學方法
采用SPSS22.0統計軟件進行分析。計量資料經Shapiro-Wilk正態性檢驗,均符合正態分布,數據以均數±標準差表示,組間比較采用獨立樣本t檢驗;計數資料以率表示,組間比較采用Fisher確切概率法。檢驗水準取雙側α=0.05。
2 結果
實驗組鎖定時間為(273.94±38.67)s,明顯短于對照組的(378.38±152.72)s;透視次數為(4.56±0.81)次,明顯少于對照組的(8.00±3.98)次;差異均有統計學意義 [MD=?104.44(273.94,378.38),P=0.049;MD=?3.44(4.56,8.00),P=0.002]。實驗組首次鎖定成功率為100%(16/16),明顯高于對照組68.75%(11/16),差異有統計學意義(P=0.043)。
3 討論
骨科手術中常規使用C臂X線機有助于骨折復位和植入物準確定位,但其產生的電離輻射會導致細胞突變或死亡[16-18],對人體造成損害[19-21]。在股骨交鎖髓內釘手術過程中,尤其是遠端鎖定操作中,傳統方法需要頻繁使用C臂X線機進行透視[13,22]。為了縮短股骨髓內釘遠端鎖定時間,減少遠端鎖定透視次數,從而保護患者和手術醫生減少輻射損傷,研究者們進行了很多努力。
王軍強等[23]于2006年就對機器人輔助股骨髓內釘遠端孔鎖定進行了探索,提出使用小型化并聯機器人結構進行股骨髓內釘遠端鎖釘進行鎖定,為國內骨科機器人研究奠定了基礎。Boraiah等[24]于2009年研發出遠端聯鎖方式來減少股骨髓內釘遠端鎖定時間及透視次數,但是方法較繁瑣,并且不適用于所有髓內釘,臨床上幾乎未被采用。Krettek等[25]在尸體股骨標本上測試了一種無需輻射的遠端瞄準裝置,不需要透視就可插入遠端鎖定螺釘,但是股骨髓內釘較長,立足于這種硬件的鎖定裝置經常會發生形變,導致鎖定失敗。2013年Stathopoulos等[26]研究了一種用于遠端鎖定的電磁瞄準系統,提出使用這種裝置可以減少輻射暴露和手術時間,同時還能提高準確性,此系統在臨床上有一定推廣,但由于在鎖定時間上并未明顯優于手工鎖定,所以也未得到廣泛應用。Kuang等[27]于2012年描述了一種用于髓內釘遠端鎖定的機器人,該機器人運用雙平面原理,并使用計算機導航進行引導鎖定,但后續未跟進研究。另有國產“天璣”骨科機器人,在脊柱、骨盆股骨頸等手術中均有應用,但在股骨髓內釘手術中的相關研究仍較少見[28-31]。
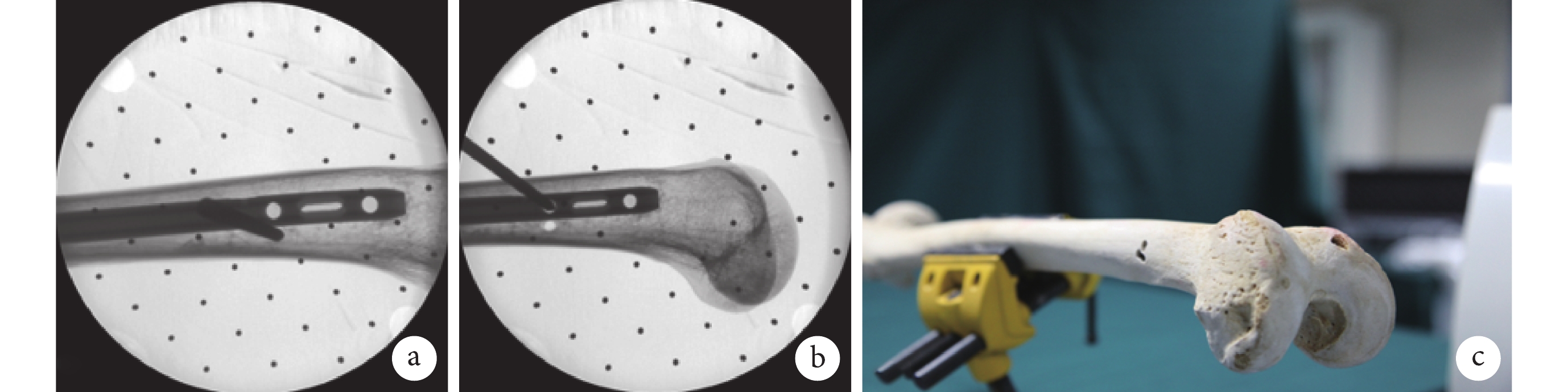
本研究使用的智能骨科機器人系統是由中國人民解放軍總醫院骨科自主研發的串聯機器人,機械手臂的靈活性和工作范圍相對于并聯機器人有一定優勢,在理念和算法上都進行了創新。進行遠端鎖定時只需拍攝1張正位和1張側位X線片即可,理論上可以大幅縮短鎖定時間,減少透視次數。另外,其可實現的定位精度為1 mm和1°,遠超傳統手工定位,故可以提高定位成功率。在實踐操作中,機器人輔助遠端鎖定效率是否優于傳統手工鎖定仍無明確結論,因此本研究對此進行了探討。結果表明,使用傳統術中透視下股骨髓內釘遠端手工鎖定失敗率高,反復鉆孔易引起骨皮質破壞,造成二次創傷(圖3)。智能骨科機器人輔助股骨髓內釘遠端鎖定效率明顯優于傳統手工鎖定,可明確縮短遠端鎖定時間、減少術中輻射、提高鎖定成功率。
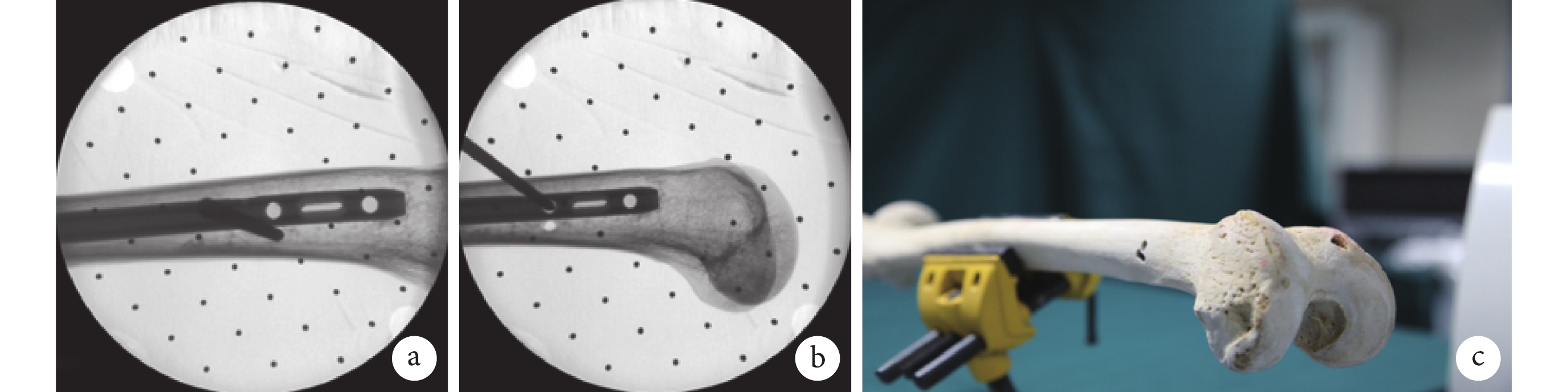 圖3
對照組首次鎖定失敗情況
圖3
對照組首次鎖定失敗情況
a. 首次鎖定失敗側位X線片;b. 經過調整后鎖定正確的側位X線片;c. 反復鉆孔導致骨皮質破壞
Figure3. First locking failure in the control groupa. Lateral X-ray film of first locking failure; b. Correct lateral X-ray film locked after adjustment; c. Bone cortex destruction due to repeated drilling
但本研究也存在一些不足,首先,本研究是以裸骨為研究對象,并未考慮實際術中肌肉軟組織的影響,結果可能存在偏倚;其次,本研究由同一名住院醫師完成,術者臨床經驗的局限也可能對結果造成一定偏移;另外,術前準備時間較長,機器人設備擺放過程較為復雜,為充分利用時間,在消毒作業和護士進行器械擺臺時,應同步開展相關準備工作,盡可能減少術中調試時間。下一步研究計劃以尸體標本或實驗動物為研究對象,由多名住院醫師和主治醫師操作,更系統地分析在有軟組織存在情況下智能骨科機器人輔助是否仍可提高股骨髓內釘遠端鎖定效率。
利益沖突 在課題研究和文章撰寫過程中不存在利益沖突;經費支持沒有影響文章觀點和對研究數據客觀結果的統計分析及其報道
倫理聲明 研究方案經中國人民解放軍總醫院倫理委員會批準(S2022-629-02)
作者貢獻聲明 王錕:研究實施及數據收集,文章撰寫及修改;郝明、張巍:研究設計及指導實施;徐萃、王中鶴:檢驗數據可靠性及統計分析;王軍松、聶少波、趙燕鵬:數據采集;郝明:對文章的知識性內容作批評性審閱
股骨干骨折是股骨小轉子下2~5 cm至股骨髁上2~5 cm的股骨骨干骨折,常由高暴力損傷導致,好發生于青年人群,約占成人全身骨折的6%[1-2]。閉合交鎖髓內釘是目前臨床上治療股骨干骨折最常用方式[3-6]。其優勢在于手術創傷小、彈性固定以及患者能夠早期進行功能鍛煉等[6-9]。但其劣勢也不容忽視,例如術中透視對患者及術者造成顯著輻射損傷[10-12];髓內釘遠端鎖定比較困難,需要手術醫生在大量透視下才能完成[13-14];反復鉆孔導致股骨皮質破壞,降低了鎖釘把持力而引起鎖釘失效等。如何提高股骨髓內釘的手術效率,減少醫患輻射損傷已成為研究熱點。近年來,隨著手術機器人在臨床中的應用越來越廣泛,有研究者提出可以用機器人輔助來提高股骨髓內釘遠端鎖定效率[15]。鑒于此,中國人民解放軍總醫院骨科團隊自主研發了一款智能骨科機器人,本研究擬通過標本模擬實驗,探討此智能骨科機器人能否提高股骨髓內釘遠端鎖定效率,減少手術醫生和患者所受輻射損傷。報告如下。
1 資料與方法
1.1 研究對象及分組
成人尸體股骨標本32個,由陸軍軍醫大學解剖教研室提供。標本均無肉眼可見的骨折、畸形、腫瘤等,經去除軟組織和干燥處理。按照隨機數字表法將股骨標本分為實驗組和對照組,每組16個。實驗組采用智能骨科機器人輔助股骨髓內釘遠端鎖孔鎖定,對照組采用傳統X線透視下手工鎖定。本研究所用髓內釘為TWG股骨順行髓內釘(山東威高骨科材料股份有限公司),X線透視設備為Arcadic Varic術中移動C臂X線機(Siemens公司,德國)。智能骨科機器人為中國人民解放軍總醫院骨科團隊自主研發產品,主要硬件結構由六自由度定位機械臂、末端導向套筒、紅外線導航系統組成,機械臂的最大空間運動范圍為1 300 mm,可實現的定位精度為1 mm和1°。
1.2 研究方法
兩組實驗由同一名住院醫師完成。預先將髓內釘植入股骨標本內,入釘點為股骨大轉子尖端,經過開口、擴髓后植入股骨髓內釘,髓內釘的遠端不超過股骨髕骨切跡上緣;然后將股骨標本用夾鉗固定于實驗臺后進行下一步遠端鎖孔的鎖定。
實驗組手術流程:① 定位機械臂擺放至術區,安裝末端導向套筒,導航系統開機;② 在股骨遠端安裝參考架;③ 利用C臂X線機攝髓內釘遠端鎖定孔的正、側位X線片,并自動導入導航軟件中;④ 在軟件中識別髓內釘鎖定孔位置,自動進行定位運動的路徑規劃;⑤ 下達指令后,機械臂沿著路徑規劃自動運動,直至末端導向套筒軸線與髓內釘鎖定孔軸線完全重合;⑥ 醫生沿著末端導向套筒手動進行鉆孔,置入直徑4 mm鎖釘導針;⑦ 再次攝正側位X線片,驗證導針是否在鎖定孔內。見圖1。
圖1
實驗組手術操作
a. 智能骨科機器人輔助下髓內釘遠端鎖孔鎖定場景圖;b、c. 導針穿透遠端鎖定孔后正、側位X線片
Figure1. Surgical operation of the experimental groupa. Scene of distal locking of intramedullary nail assisted by intelligent orthopedic robot; b, c. Anteroposterior and lateral X-ray films after the guide pin penetrated the distal locking hole
對照組手術流程:① 醫生穿上鉛衣防護;② 助手將C臂X線機擺放至拍攝股骨遠端側位片位置,調整方向至鎖定孔呈像為正圓形;③ 將4 mm鎖釘導針安裝于電鉆上,根據經驗將導針尖端置于鎖孔在外側皮質骨投影的大概位置;④ C臂X線機透視下將導針尖端調整至鎖定孔于骨皮質的投影中心;⑤ 鉆開骨皮質,進入鎖孔;⑥ C臂X線機透視確認方向無誤后,繼續鉆孔直至通過股骨內側皮質;⑤ 攝正側位X線片驗證導針是否在鎖定孔內。見圖2。
圖2
對照組手術操作
a. 傳統X線透視下手工鎖定場景圖;b. 手動將導針穿透遠端鎖定孔后;c. 手工鎖定時導針穿入前的定位X線片;d. 導針穿透遠端鎖定孔后側位X線片
Figure2. Surgical operation of the control groupa. Scene of manual locking under traditional X-ray fluoroscopy; b. After manually penetrating the guide pin through the distal locking hole; c. Localization X-ray film before inserting the guide pin during manual locking; d. Lateral X-ray film after the guide pin penetrated the distal locking hole
1.3 觀察指標
記錄并比較兩組以下指標:① 鎖定時間:兩組均從遠端鎖定孔的第1次透視開始計時,至導針穿過遠端鎖定孔,并經過透視確認鎖釘導針穿過遠端鎖定孔且穿透內側皮質結束;實驗組再加上參考架安裝時間。② 透視次數:鎖定時間內C臂X線機拍攝X線片的次數。③ 首次鎖定成功率:第1次鉆孔時導針成功穿過鎖定孔的概率。
1.4 統計學方法
采用SPSS22.0統計軟件進行分析。計量資料經Shapiro-Wilk正態性檢驗,均符合正態分布,數據以均數±標準差表示,組間比較采用獨立樣本t檢驗;計數資料以率表示,組間比較采用Fisher確切概率法。檢驗水準取雙側α=0.05。
2 結果
實驗組鎖定時間為(273.94±38.67)s,明顯短于對照組的(378.38±152.72)s;透視次數為(4.56±0.81)次,明顯少于對照組的(8.00±3.98)次;差異均有統計學意義 [MD=?104.44(273.94,378.38),P=0.049;MD=?3.44(4.56,8.00),P=0.002]。實驗組首次鎖定成功率為100%(16/16),明顯高于對照組68.75%(11/16),差異有統計學意義(P=0.043)。
3 討論
骨科手術中常規使用C臂X線機有助于骨折復位和植入物準確定位,但其產生的電離輻射會導致細胞突變或死亡[16-18],對人體造成損害[19-21]。在股骨交鎖髓內釘手術過程中,尤其是遠端鎖定操作中,傳統方法需要頻繁使用C臂X線機進行透視[13,22]。為了縮短股骨髓內釘遠端鎖定時間,減少遠端鎖定透視次數,從而保護患者和手術醫生減少輻射損傷,研究者們進行了很多努力。
王軍強等[23]于2006年就對機器人輔助股骨髓內釘遠端孔鎖定進行了探索,提出使用小型化并聯機器人結構進行股骨髓內釘遠端鎖釘進行鎖定,為國內骨科機器人研究奠定了基礎。Boraiah等[24]于2009年研發出遠端聯鎖方式來減少股骨髓內釘遠端鎖定時間及透視次數,但是方法較繁瑣,并且不適用于所有髓內釘,臨床上幾乎未被采用。Krettek等[25]在尸體股骨標本上測試了一種無需輻射的遠端瞄準裝置,不需要透視就可插入遠端鎖定螺釘,但是股骨髓內釘較長,立足于這種硬件的鎖定裝置經常會發生形變,導致鎖定失敗。2013年Stathopoulos等[26]研究了一種用于遠端鎖定的電磁瞄準系統,提出使用這種裝置可以減少輻射暴露和手術時間,同時還能提高準確性,此系統在臨床上有一定推廣,但由于在鎖定時間上并未明顯優于手工鎖定,所以也未得到廣泛應用。Kuang等[27]于2012年描述了一種用于髓內釘遠端鎖定的機器人,該機器人運用雙平面原理,并使用計算機導航進行引導鎖定,但后續未跟進研究。另有國產“天璣”骨科機器人,在脊柱、骨盆股骨頸等手術中均有應用,但在股骨髓內釘手術中的相關研究仍較少見[28-31]。
本研究使用的智能骨科機器人系統是由中國人民解放軍總醫院骨科自主研發的串聯機器人,機械手臂的靈活性和工作范圍相對于并聯機器人有一定優勢,在理念和算法上都進行了創新。進行遠端鎖定時只需拍攝1張正位和1張側位X線片即可,理論上可以大幅縮短鎖定時間,減少透視次數。另外,其可實現的定位精度為1 mm和1°,遠超傳統手工定位,故可以提高定位成功率。在實踐操作中,機器人輔助遠端鎖定效率是否優于傳統手工鎖定仍無明確結論,因此本研究對此進行了探討。結果表明,使用傳統術中透視下股骨髓內釘遠端手工鎖定失敗率高,反復鉆孔易引起骨皮質破壞,造成二次創傷(圖3)。智能骨科機器人輔助股骨髓內釘遠端鎖定效率明顯優于傳統手工鎖定,可明確縮短遠端鎖定時間、減少術中輻射、提高鎖定成功率。
圖3
對照組首次鎖定失敗情況
a. 首次鎖定失敗側位X線片;b. 經過調整后鎖定正確的側位X線片;c. 反復鉆孔導致骨皮質破壞
Figure3. First locking failure in the control groupa. Lateral X-ray film of first locking failure; b. Correct lateral X-ray film locked after adjustment; c. Bone cortex destruction due to repeated drilling
但本研究也存在一些不足,首先,本研究是以裸骨為研究對象,并未考慮實際術中肌肉軟組織的影響,結果可能存在偏倚;其次,本研究由同一名住院醫師完成,術者臨床經驗的局限也可能對結果造成一定偏移;另外,術前準備時間較長,機器人設備擺放過程較為復雜,為充分利用時間,在消毒作業和護士進行器械擺臺時,應同步開展相關準備工作,盡可能減少術中調試時間。下一步研究計劃以尸體標本或實驗動物為研究對象,由多名住院醫師和主治醫師操作,更系統地分析在有軟組織存在情況下智能骨科機器人輔助是否仍可提高股骨髓內釘遠端鎖定效率。
利益沖突 在課題研究和文章撰寫過程中不存在利益沖突;經費支持沒有影響文章觀點和對研究數據客觀結果的統計分析及其報道
倫理聲明 研究方案經中國人民解放軍總醫院倫理委員會批準(S2022-629-02)
作者貢獻聲明 王錕:研究實施及數據收集,文章撰寫及修改;郝明、張巍:研究設計及指導實施;徐萃、王中鶴:檢驗數據可靠性及統計分析;王軍松、聶少波、趙燕鵬:數據采集;郝明:對文章的知識性內容作批評性審閱