本研究設計開發了基于空氣壓差技術的減重康復步行訓練系統。該系統采用比例-積分-微分控制器(PID)控制算法精確控制人體減重量,以美國德州儀器公司的混合信號處理器 MSP430F149 作為氣壓控制的核心,并使用微軟公司的 Microsoft Visual C++ 6.0 開發程序設計上位機訓練軟件。該系統能夠為下肢運動功能障礙患者提供舒適的減重步行訓練環境,并能夠實現對患者肌電信號的采集,以便于進一步對患者的信息進行科學、規范的管理。本文通過該訓練系統對 10 名正常人進行下肢初始承重量、最大減重后下肢承重量、最大減重百分比等參數進行采集,分析結果顯示,其組內相關系數(ICC)值均大于 0.6。本文研究結果證實,該步行訓練系統可靠性高,能夠為臨床下肢減重康復步行訓練提供科學的數據。
引用本文: 朱文超, 徐秀林, 姚曉明, 馬關坡, 張東衡. 壓差式氣動減重康復步行訓練系統的設計. 生物醫學工程學雜志, 2017, 34(4): 565-571. doi: 10.7507/1001-5515.201512043 復制
版權信息: ?四川大學華西醫院華西期刊社《生物醫學工程學雜志》版權所有,未經授權不得轉載、改編
引言
腦卒中是我國的常見病和多發病,全國每年新發腦卒中患者約 200 萬人,其中約 85% 留有肢體運動功能障礙,70% 以上患者通過早期步行訓練可恢復行走能力,但是對于偏癱等運動功能受損患者,要進行獨立行走訓練是非常困難的[1],要獲得良好的步態和步行速度則更難。在常規的手術、藥物治療之后,能幫助患者快速恢復健康的手段是康復訓練[2-3]。對于下肢康復,醫學上通常是通過重復的特定任務訓練讓患者進行足夠的重復性活動,基于這種方法的訓練已取得良好的臨床效果[4-5]。然而大多數下肢運動功能障礙患者的下肢承重能力較差,需要在減重方式下進行訓練[6]。
不同程度地減少下肢負荷的減重訓練(body weight support training,BWST)是一種有效的康復治療方法[7-8]。患者在減重訓練時減輕了下肢承受重量,能夠使患者保持正確的上身姿勢和步行姿態,并且能夠加強患者下肢肌群的肌力,增強踝關節、膝關節和髖關節的穩定性,促進患者步行運動時各關節、肌群及神經支配的協調性,故對患者步態整體的平衡能力調節非常有效。應用 BWST 對下肢運動功能障礙患者進行以負重、邁步及平衡三要素相結合為主要特點的強化步行訓練,可以使患者步行及平衡能力得以最大恢復[9]。目前用于康復步行訓練的減重方式主要有懸掛減重方式、斜床背部減重方式、水浮力減重方式等[10-12]。其中,懸掛減重方式因采用繃帶在患者身體局部施加向上的作用力容易使患者感到不舒適;而斜床背部減重方式并未實現真正意義上的下肢步行訓練;另外,水浮力減重方式需要穿戴特別制作的衣服在水中訓練,舉升力的高度和重心隨著水位而變化,而且需要水池,故不方便日常訓練使用;因此上述各種減重方式各具有其使用的局限性,限制了它們在臨床中的推廣應用。
此外,表面肌電信號(surface electromyogra-phy,SEMG)是評估神經肌肉功能的定量方法,可用于了解治療前患者受損神經肌肉功能的狀況及觀察治療前后患側神經肌肉功能的改善,以評估治療效果,并根據結果來調整和制定出具有針對性的個體化康復處方[13-14]。合理的下肢減重康復步行訓練系統應由舒適的下肢減重支撐模塊、神經肌肉功能狀況評估模塊、科學的下肢康復訓練軟件等部分組成。
為給下肢運動功能障礙患者提供更有效、舒適的減重步行康復訓練環境,本研究設計研發了壓差式氣動減重康復步行訓練系統。本系統采用空氣壓差(differential air pressure)技術進行減重,以輔助患者站立和行走。訓練時將人體下半身置于密閉氣囊內,由加壓裝置給氣囊增壓,通過調節氣囊內的壓力獲得不同的舉升力,在步行器帶動下,患者可多自由度進行減重步行訓練,同時配備了康復訓練軟件,能夠實現患者表面肌電信號的采集和顯示、患者信息的管理、訓練過程的監測、訓練條件及訓練報告的保存,以更加科學的方式實現康復訓練。本系統采用壓差式氣動減重的設計方案,支撐力作用點接近人體實際重心,具有易于實現站立平衡,與患者生理狀況適配性好、安全性高等特點,同時可實現大范圍、精確迅速地調節減重程度,對步行訓練智能系統的設計提供了新的實現形式,有助于人體康復訓練系統的進一步研究。
1 系統總體設計
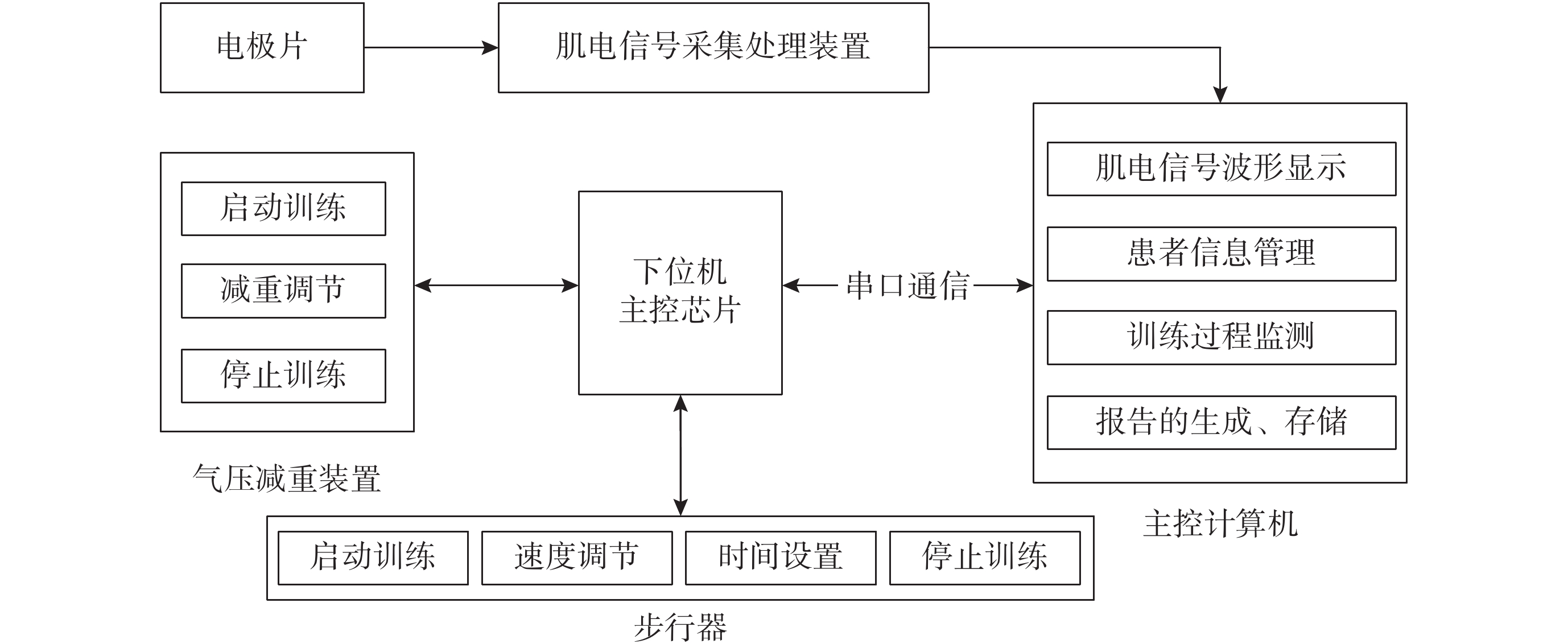
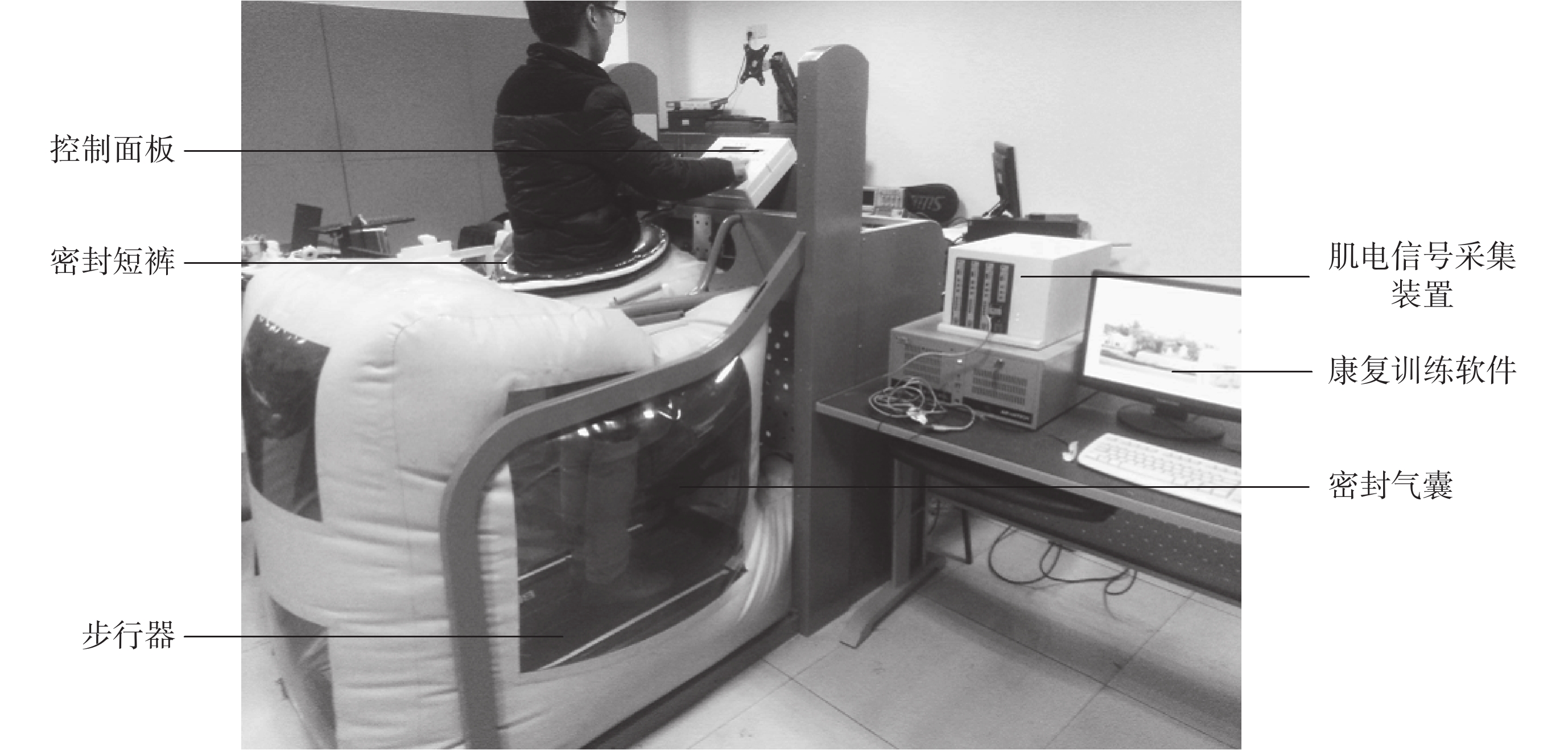
該訓練系統主要由步行器、氣壓減重裝置、表面肌電信號采集裝置、康復訓練軟件等組成。步行器能夠精確設定跑步速度、跑步時間等參數;氣壓減重裝置能夠精確地控制患者的減重量;表面肌電信號采集裝置能夠采集患者下肢步行訓練時的表面肌電信號并傳送到上位機;康復訓練軟件能夠實現表面肌電信號的實時顯示、患者信息的管理、訓練過程的監測、訓練條件及訓練報告的保存等功能。系統的總體結構框架如圖 1 所示,已成型的系統整體實物如圖 2 所示。
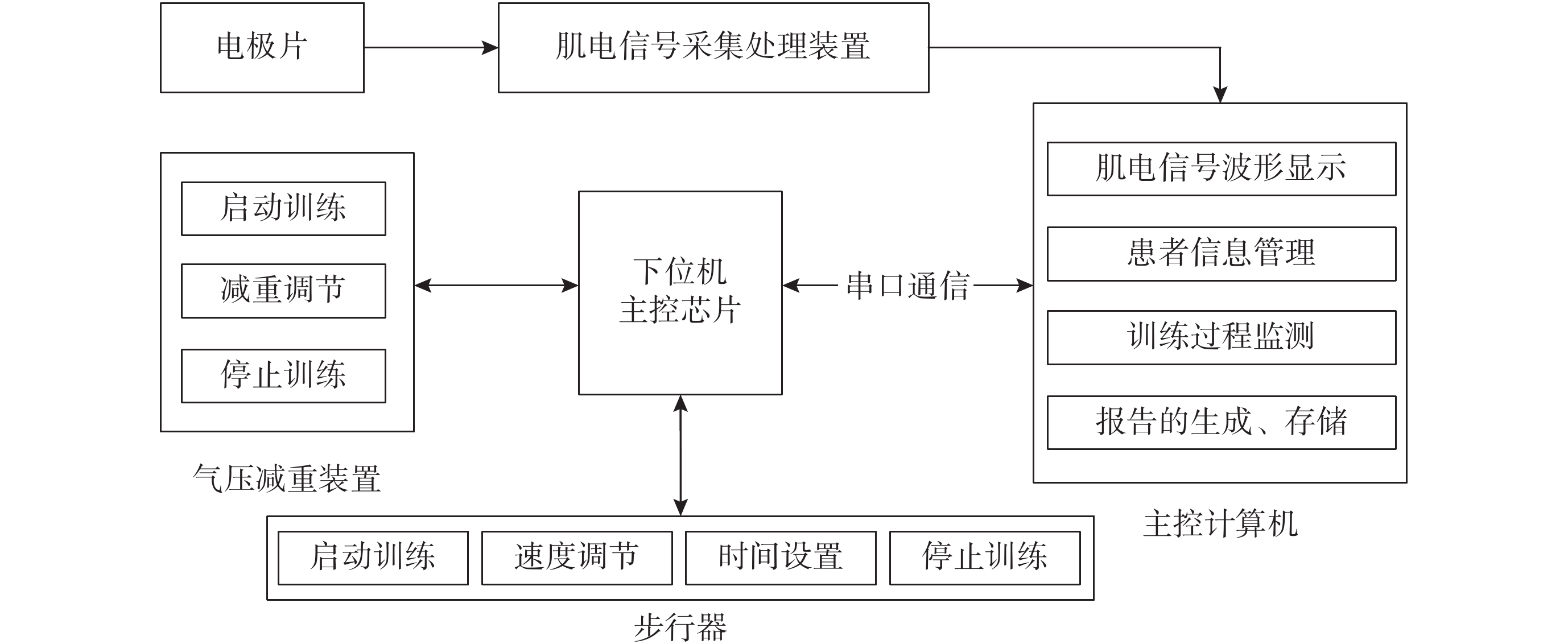 圖1
系統總體結構框圖
Figure1.
The block diagram of the system
圖1
系統總體結構框圖
Figure1.
The block diagram of the system
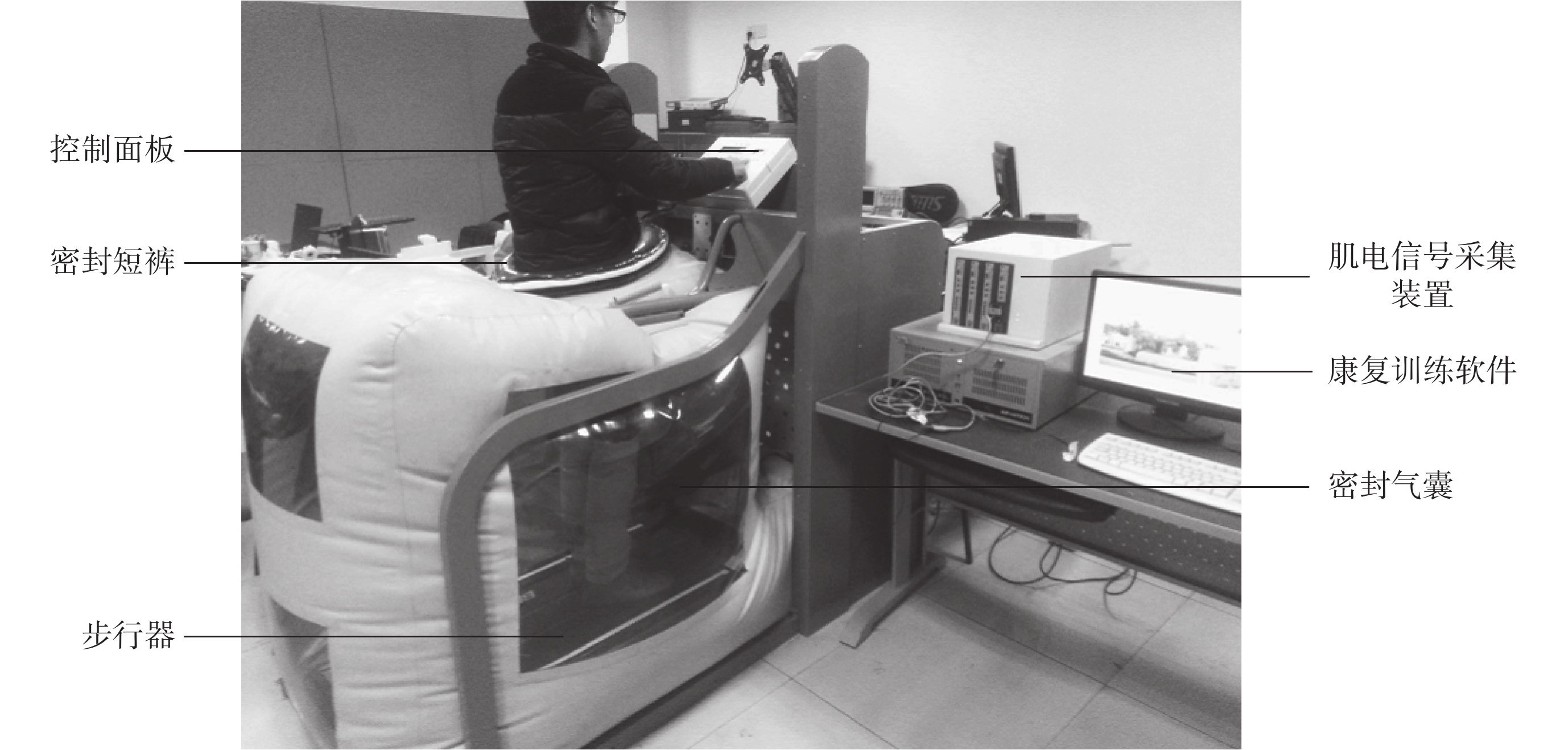 圖2
空氣壓差式減重康復步行訓練系統
Figure2.
The Weight Loss Walking Rehabilitation Training System based on air pressure difference
圖2
空氣壓差式減重康復步行訓練系統
Figure2.
The Weight Loss Walking Rehabilitation Training System based on air pressure difference
2 系統硬件設計
2.1 步行器及控制面板設計
如圖 2 所示,本系統將步行器置于氣囊內,由電動機的動力為患者的步行提供助力。設計步行器的步行訓練面積為 101×32 cm2;根據 2010 年國民體質監測報告顯示,成年人平均體重為 70 kg,因此設計步行器的最大承重量為 120 kg[15],以滿足大多數患者的減重步行訓練需求;步行器速度設計為 1~8 km/h,以提供合適的速度范圍,滿足不同患者對不同速度的需要。
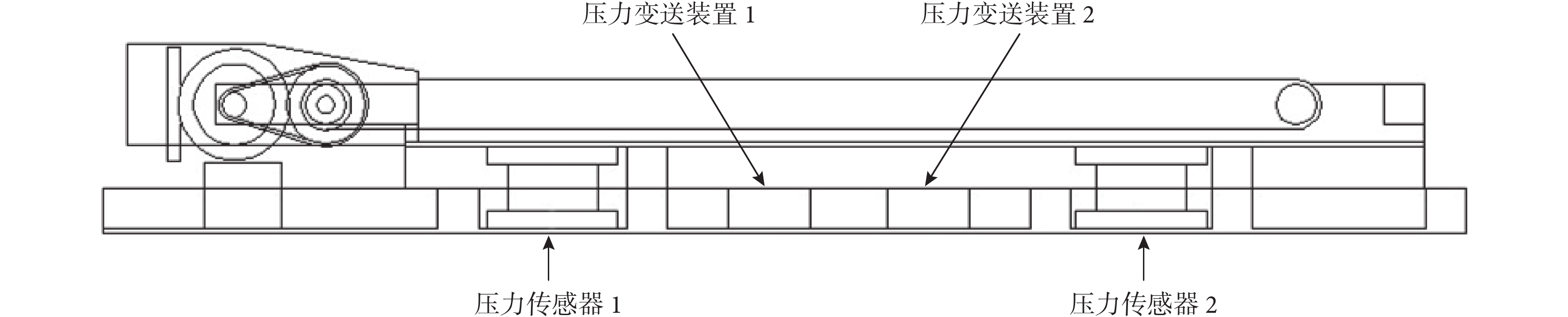
為了實現精確控制減重量,在步行器的下方裝有壓力傳感器(TH4801,博通電子技術/合肥)和壓力變送裝置(TH4805,博通電子技術/合肥),如圖 3 所示。兩者結合共同完成對足底壓力信號的濾波、去噪、放大,以得到穩定可信的足底壓力信號,該壓力傳感器誤差精度為±0.05% F.S,由 24 V 直流電源供電,輸出 0~5 V 的模擬電壓對應 0~200 kg 的重量;考慮到步行時對跑帶沖擊的影響,將采集頻率定為 50 Hz,以確保運動時動態測量的精度;為增加壓力測量精度,用 50 kg、100 kg、150 kg、200 kg 的標定砝碼測取對應傳感器信號的電壓值,以此求出線性標定曲線,其線性方程為 y=0.025 3x+0.075 8,其中 y 為電壓值,x 為所測物體質量。
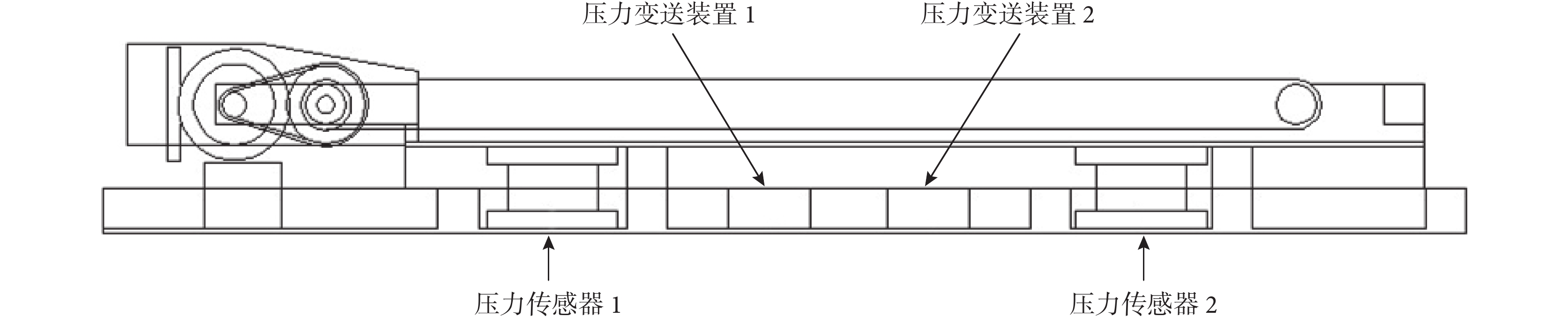 圖3
步行器設計圖
Figure3.
The design of walking device
圖3
步行器設計圖
Figure3.
The design of walking device
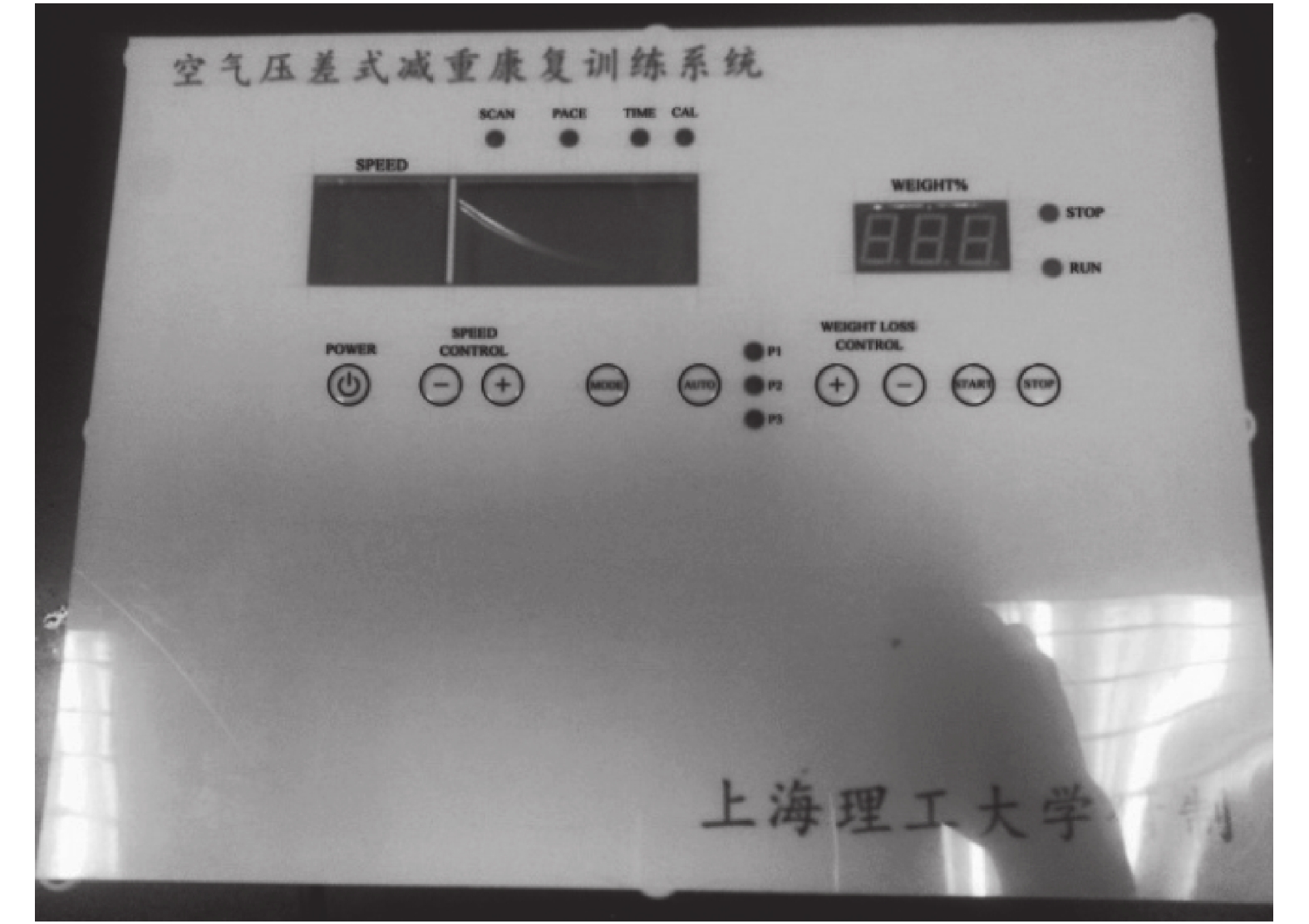
為調節氣壓減重裝置和步行器的各項參數,該康復訓練系統配有控制面板,如圖 4 所示。該控制裝置可通過控制面板上的按鍵,開始、停止步行器和氣壓減重裝置,設置訓練的速度和減重大小,同時記錄步行器的運行時間以控制下肢康復訓練強度。
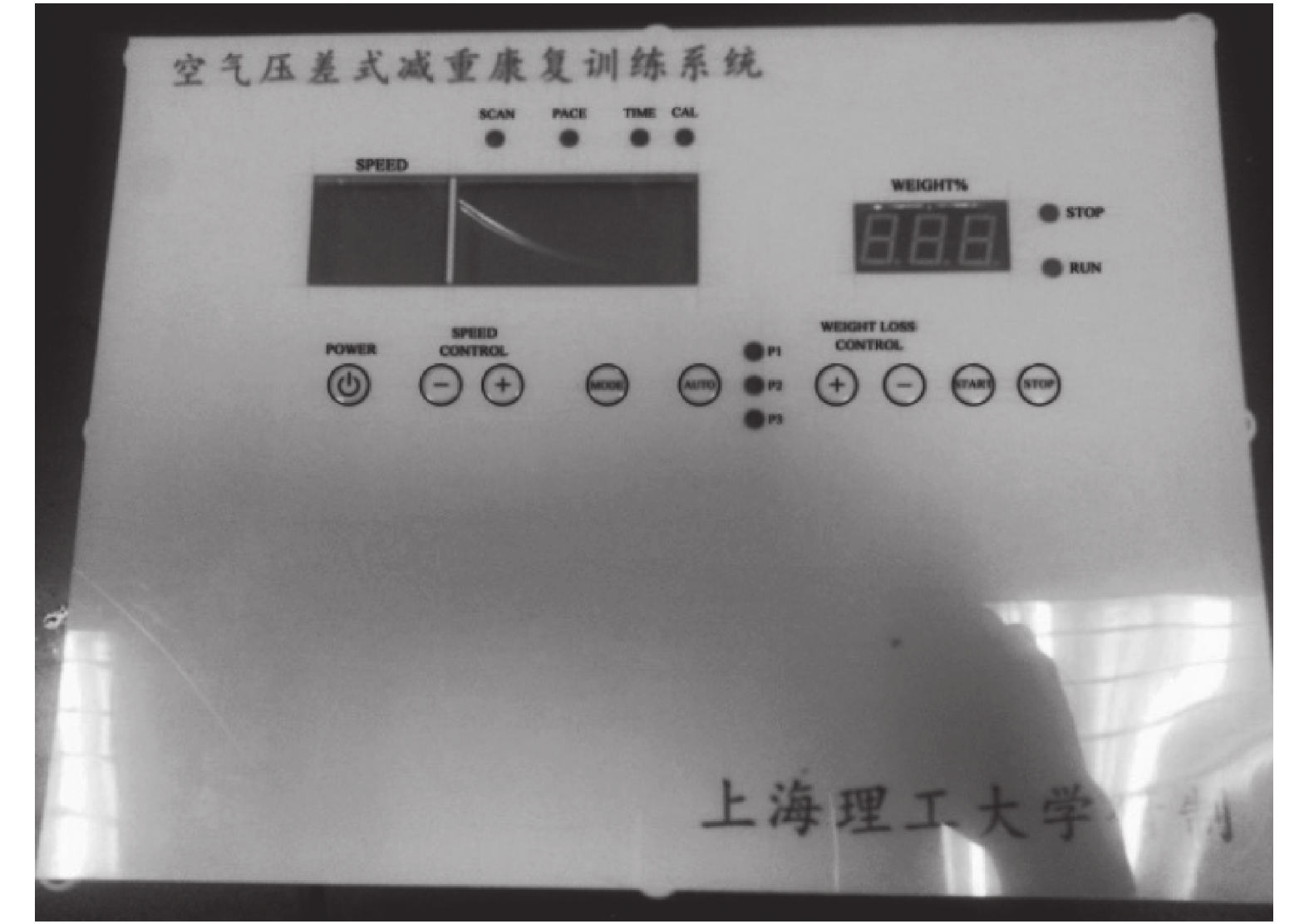 圖4
控制面板
Figure4.
The interface of control system
圖4
控制面板
Figure4.
The interface of control system
控制面板左側區域主要控制步行器的各項參數,實時狀態顯示在左側的液晶屏幕上;控制面板右側區域主要控制氣壓減重裝置各項參數,減重運行指示燈(RUN)亮表明氣壓減重裝置處于運行狀態,減重停止指示燈(STOP)亮表明氣壓減重裝置處于停止狀態,減重量的大小在右側數碼管顯示。
2.2 氣體壓差減重設計
2.2.1 氣體壓力減重原理 該系統采用了空氣壓差技術來減輕患者下肢所承受的重量。空氣壓力差 ΔP=P2–P1,其中 P2 為氣囊內的空氣壓強,P1 為大氣壓強,他們之間產生一個壓強差 ΔP,該壓強差作用在氣囊和密封短褲所圍成的截面積 S 上,產生一個向上的提升力 F=ΔP·S。這個向上的力與患者所受重力方向相反,可與重力進行部分抵消,以實現減重目的。
2.2.2 氣體壓力控制 減重量大小由氣體壓力的大小控制。該系統的氣體壓力控制采用排氣閥自動調節。該系統的增壓采用鼓風機(RB-400AS,貝雷克機械/中國)持續充氣的方式,其最大靜壓輸出為 11 kPa,流量為 1.5 m3/min,能夠滿足系統對充氣時間和充氣壓力的需求。
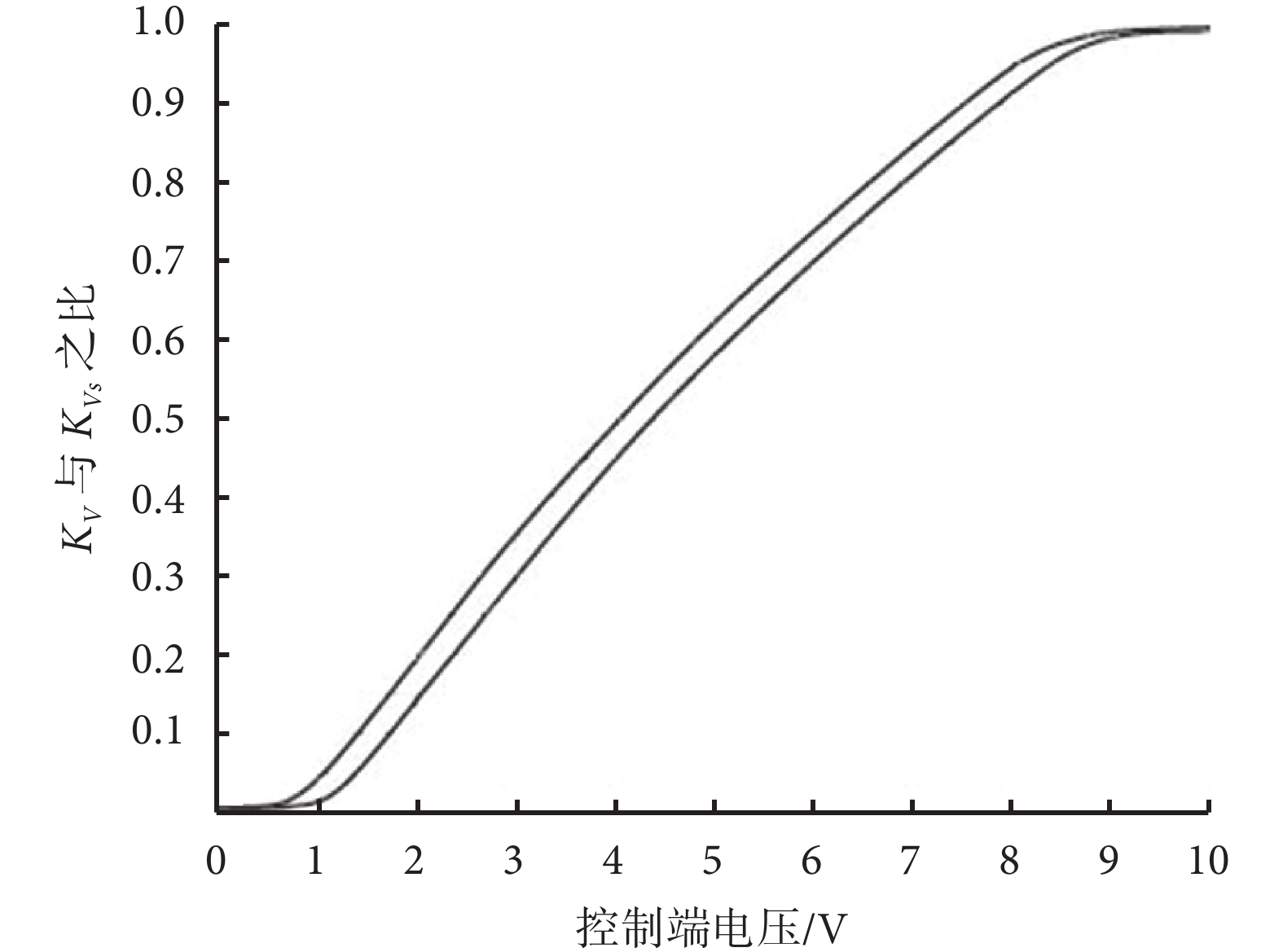
為了能夠精確控制氣囊內氣體的壓力,排氣閥采用兩位兩通低壓差比例電磁閥(DS6024,寶得/德國)配以比例-積分-微分控制器(proportion-Integral-Derivative,PID)(MA8611,寶得/德國),比例電磁閥工作曲線如圖 5 所示。通過控制加在其控制端的電壓(0~10 V)以控制比例電磁閥的開度從而控制氣體排放的流量,KVs 是比例閥的最大流量,KV 是對應控制端電壓的實時流量。
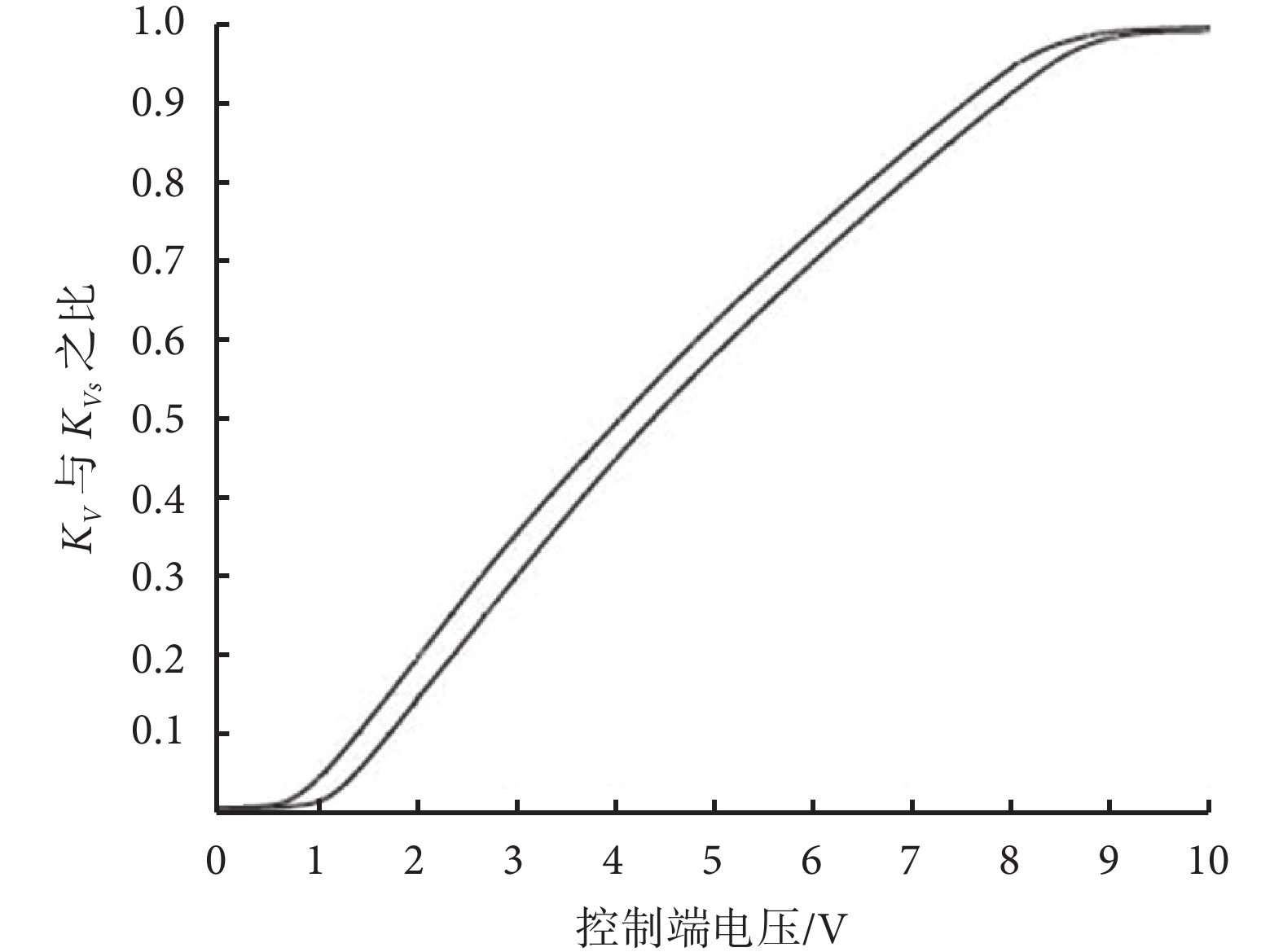 圖5
比例電磁閥工作曲線
Figure5.
The working curve of proportional solenoid valve
圖5
比例電磁閥工作曲線
Figure5.
The working curve of proportional solenoid valve
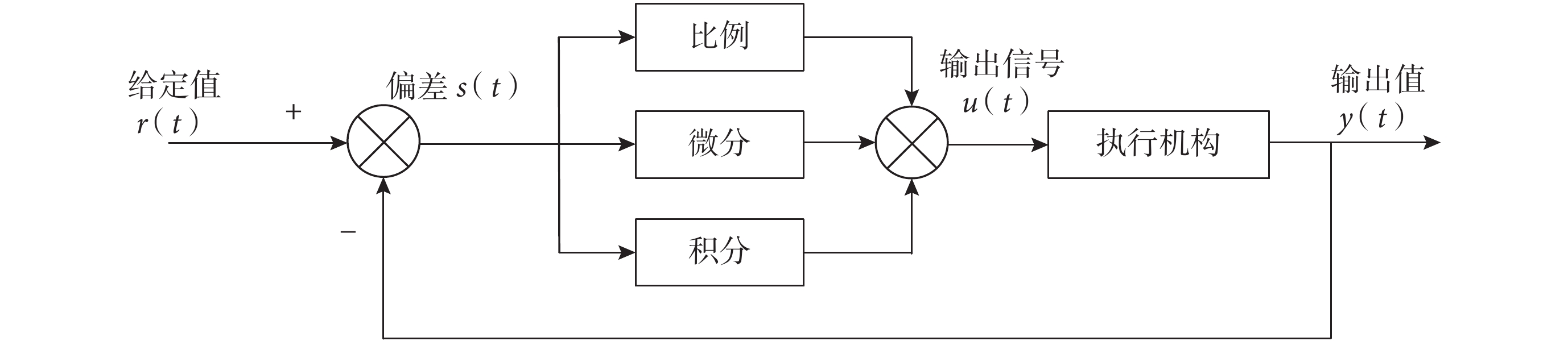
PID 控制又稱 PID 調節,PID 控制是根據系統的誤差,利用比例、積分、微分計算出輸入值然后進行控制,把系統的輸出值作為反饋,與系統的給定值進行運算后,將所得誤差加到系統的輸入端從而調節系統的輸出值。控制原理如圖 6 所示,系統的輸入值是根據輸出值實時變化,最終構成閉環系統,從而精確地調節系統的輸出值。PID 控制器中的誤差是由給定值 r(t)和實際的輸出值 y(t)所組成。給定值與輸出值之間偏差 s(t)為:
 |
PID 的控制規律為:
 |
式中 kp 為比例系數,TI 為積分時間常數,TD 為微分時間常數。其中比例環節能夠成比例的反映偏差信號 s(t),通過控制 kp 可以提高系統的穩態精度;積分環節可以用來消除靜態誤差以提高整個系統的精度;微分環節用來反映 s(t)的變化趨勢,以有效加快系統調節速度從而縮短調節時間[16]。
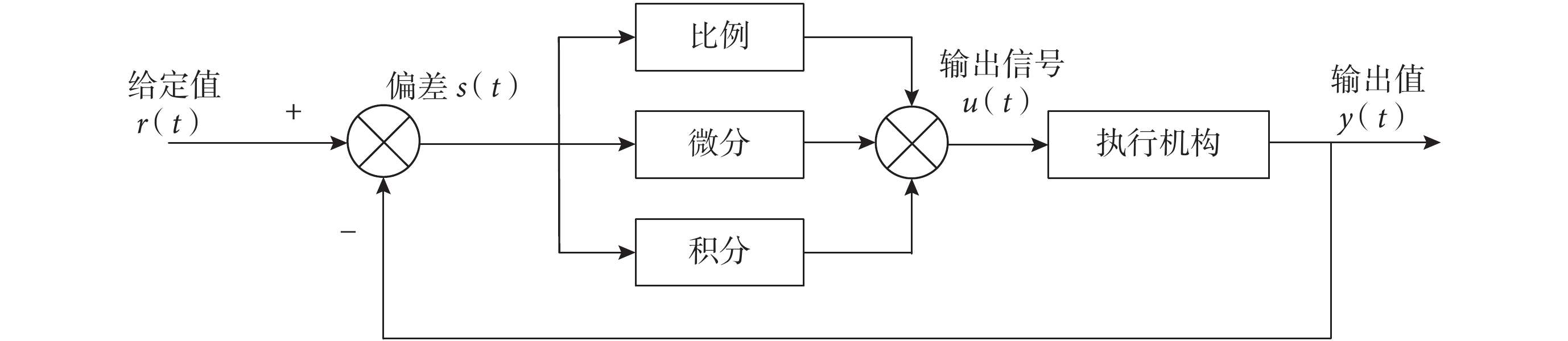 圖6
PID 控制器原理框圖
Figure6.
The block diagram of PID controller
圖6
PID 控制器原理框圖
Figure6.
The block diagram of PID controller
PID 控制器自帶有反饋端,反饋端信號為氣囊內的氣壓值,從而構成閉環調節系統。當設定的氣壓值與實際反饋端的氣壓值不相同時,PID 控制器調節比例閥達到調節排氣流量的目的,直到所設定的氣壓值和實際的氣壓值相等,從而提高了氣囊內氣體壓力的控制精度。
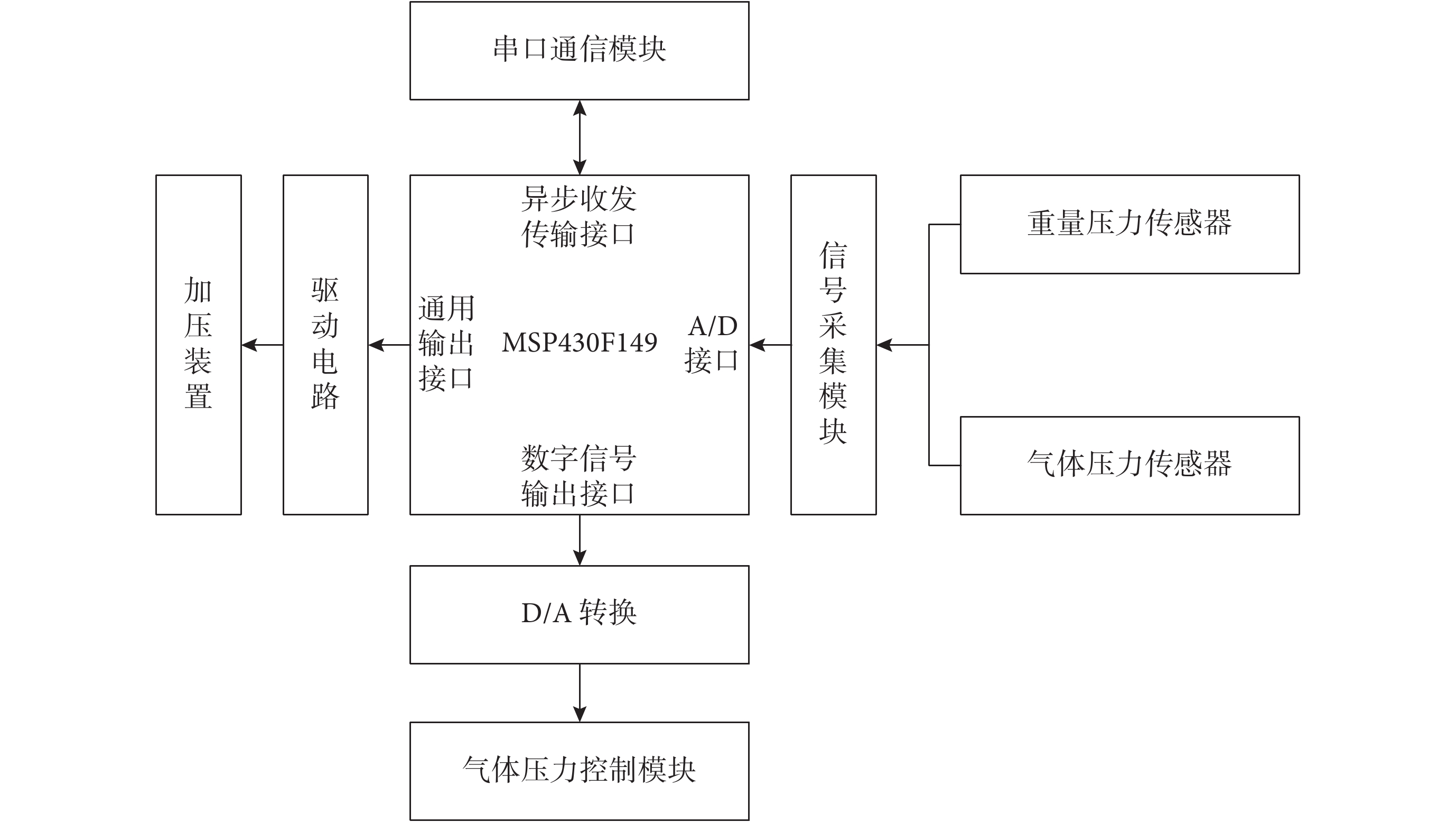
2.2.3 氣體壓力控制硬件電路設計 本文系統的硬件電路主要包括微控制器(microcontroller unit,MCU)模塊、足底壓力及氣體壓力信號采集模塊、氣體壓力控制模塊、加壓裝置模塊、串口通信模塊和電源系統模塊等,整體硬件電路框圖如圖 7 所示。氣壓減重裝置硬件模塊以微控制器(MSP430F149,德州儀器/美國)為核心,重量壓力傳感器以及氣體壓力傳感器把人體重量及氣體壓力信號傳送到信號采集模塊,信號采集模塊經過處理把體重及壓力信號傳送到控制器的模數轉換(analog-to-digital,A/D)模塊轉換為數字信號以供微控制器處理;氣體壓力控制模塊主要由 PID 控制器和比例閥組成,微控制器把設定氣壓值的數字量通過數模轉換(digital-to-analog,D/A)模塊轉換為對應的模擬量傳送到氣體壓力控制模塊完成對氣體壓力的精確控制;加壓裝置模塊主要由鼓風機及其驅動電路組成,微控制器根據串口通信模塊所傳輸的命令通過驅動電路模塊控制加壓裝置的啟動與停止;串口通信模塊主要完成和上位機的串口通信,以使整個系統協調運行。
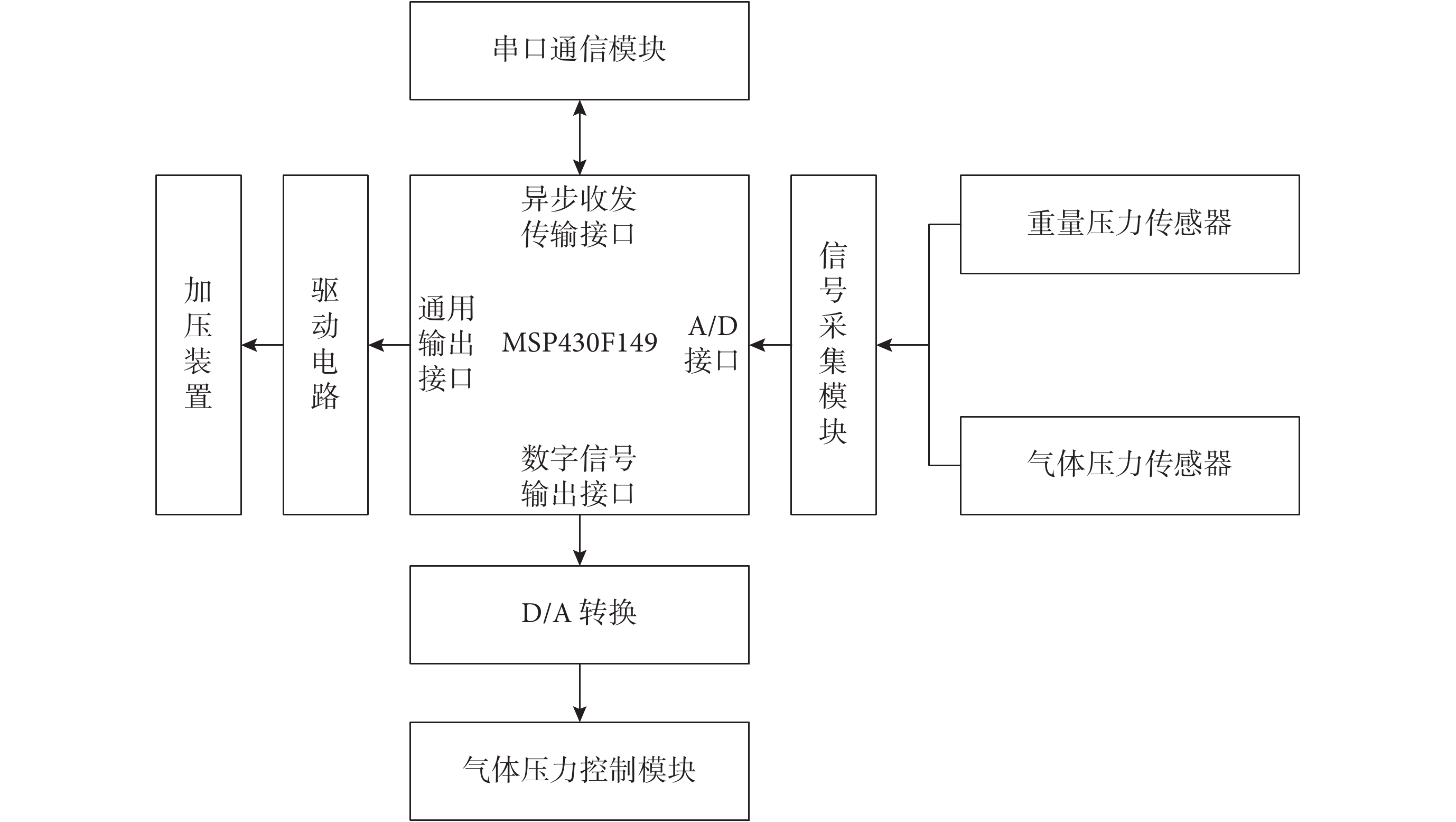 圖7
氣體壓力控制硬件電路框圖
Figure7.
The hardware circuit diagram of air pressure control
圖7
氣體壓力控制硬件電路框圖
Figure7.
The hardware circuit diagram of air pressure control
2.3 肌電采集裝置設計
表面肌電信號是經表面電極引導所獲得的神經肌肉系統的生物電時間序列信號。因表面肌電信號的幅值范圍是 2 μV~5 mV,且易受到外界及人體自身其它電生理信號的干擾,故采用三點式電極拾取表面肌電信號[17]。本肌電信號采集裝置由肌電信號放大器(EMG100C,Biopac/美國)和數據采集卡(PCI1716L,研華科技/中國臺灣)組成,其工作原理框圖如圖 8 所示。
 圖8
表面肌電采集裝置工作原理框圖
Figure8.
The working principle diagram of surface electromyogram acquisition device
圖8
表面肌電采集裝置工作原理框圖
Figure8.
The working principle diagram of surface electromyogram acquisition device
表面肌電信號首先通過前置放大電路完成初級放大,并采用共模反饋消除法進一步提高共模抑制比;工頻干擾存在于空間中,因此設計有 50 Hz 陷波電路以濾除工頻干擾;有效表面肌電信號的頻率范圍是 10~500 Hz,高通濾波電路的截止頻率為 10 Hz,低通濾波電路的截止頻率為 500 Hz;將濾波后的有效表面肌電信號,經 PCI1716L 數據采集卡轉變成數字信號后,再傳送到主控計算機供康復訓練軟件繪制表面肌電信號波形。通過繪制表面肌電信號波形,對患者下肢訓練過程中相關肌肉群肌電信號的幅值變化進行檢測,用以評估下肢康復訓練的效果。
3 康復訓練軟件設計
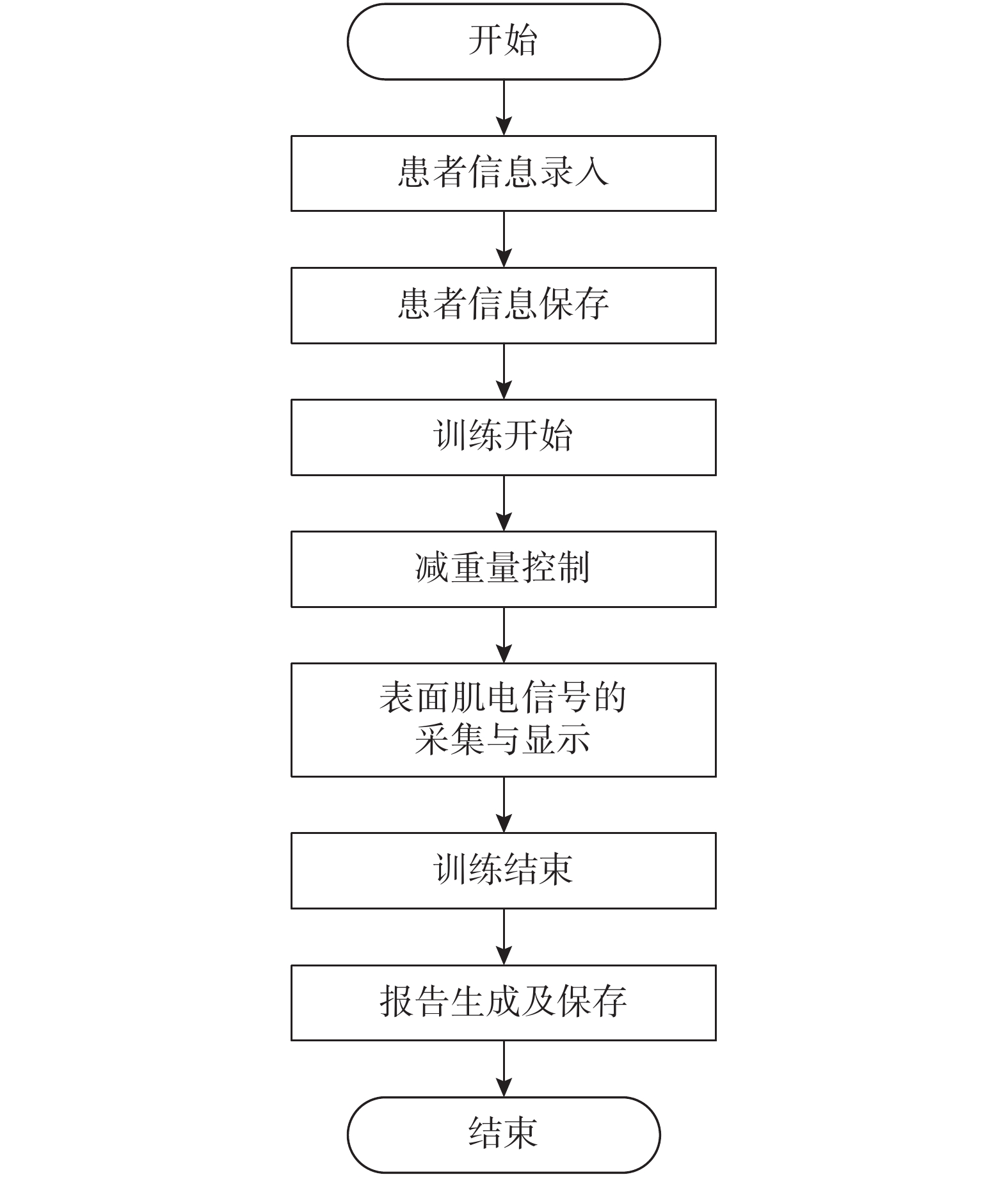
康復訓練軟件主要的功能包括訓練過程監測、表面肌電信號的采集及顯示、患者信息管理、訓練條件及訓練報告的保存等,其整體工作流程如圖 9 所示。
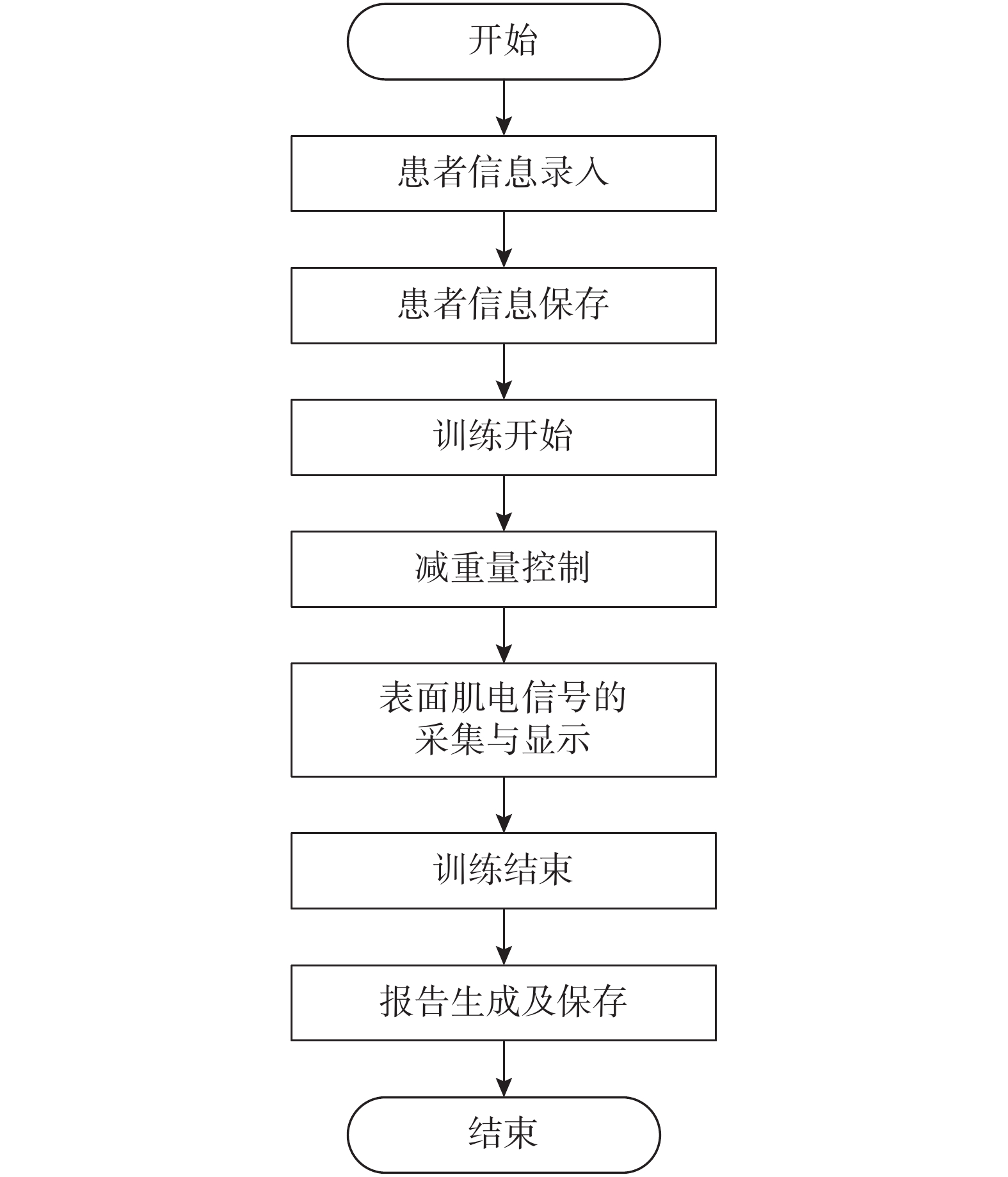 圖9
康復訓練軟件總體流程圖
Figure9.
The flow chart of rehabilitation training software
圖9
康復訓練軟件總體流程圖
Figure9.
The flow chart of rehabilitation training software
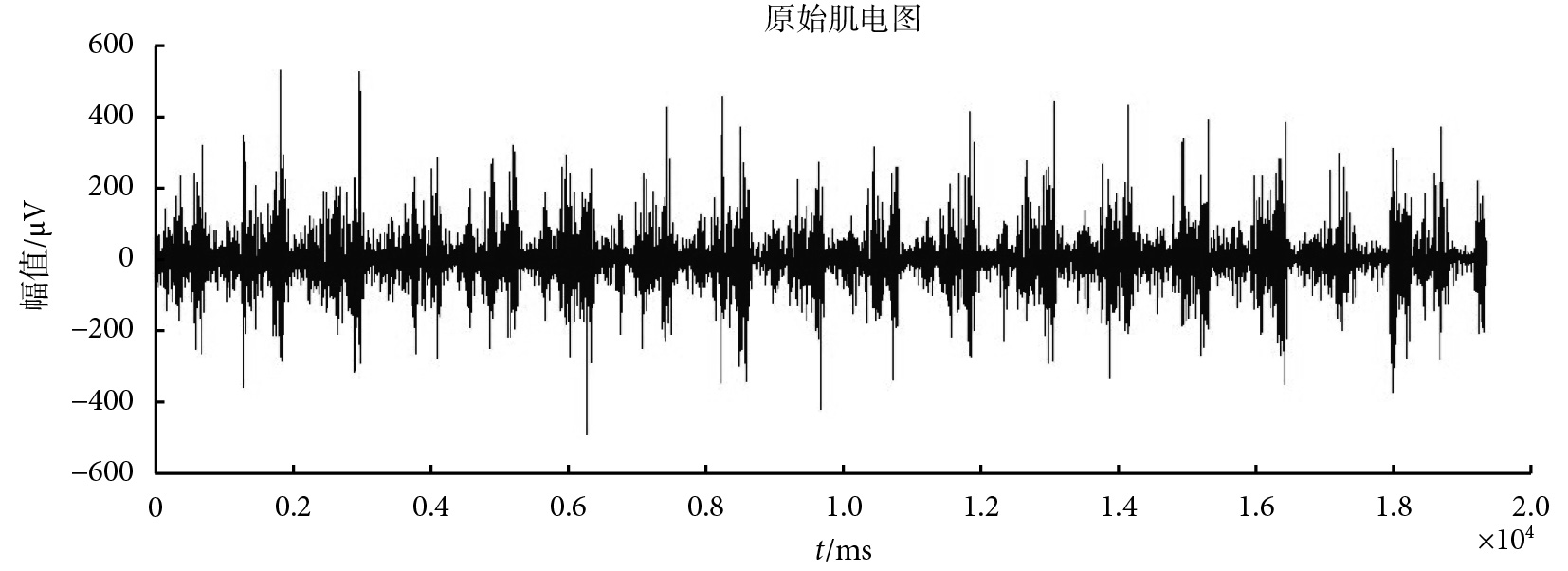
患者在訓練之前首先錄入患者信息并保存,以便于患者信息的管理。訓練開始之后訓練界面可以顯示表面肌電信號的波形以監測在下肢康復訓練運動過程中表面肌電信號的變化。訓練結束后該軟件系統可以把訓練數據生成報告保存,以方便實時查看訓練效果。利用軟件系統,可采集 4 路肌電信號,方便對多個部位的肌電信號進行提取,該軟件系統采集的表面肌電信號波形如圖 10 所示。采集表面肌電信號的頻率為 2 kHz,所得信號與肌電測試系統(ME6000,Mega/芬蘭)驗證后波形符合。
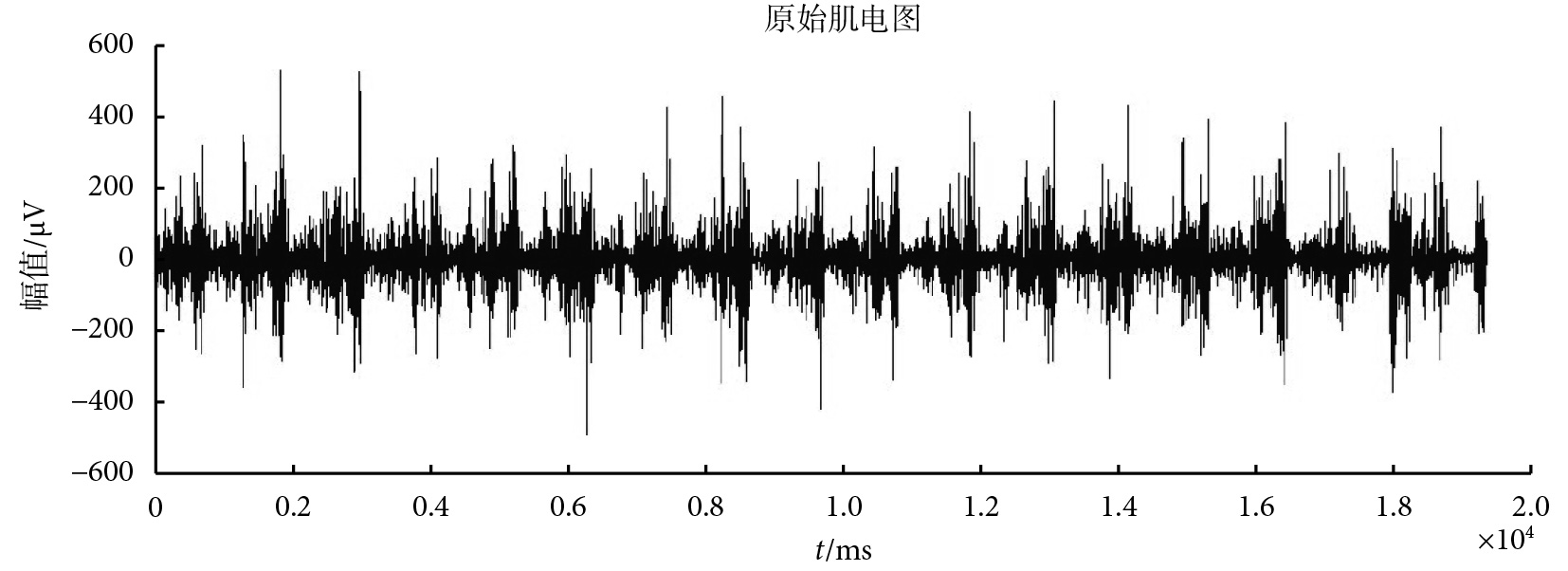 圖10
表面肌電信號波形
Figure10.
The waveform of surface electromyogram signal
圖10
表面肌電信號波形
Figure10.
The waveform of surface electromyogram signal
4 系統減重可靠性測試
本研究招募了 10 名正常受試者利用該系統進行下肢初始承重量、最大減重后下肢承重量、人體最大減重百分比等參數的測試。所有受試者均穿上密封短褲和氣囊密封連接,站立在步行器上,通過讀取步行器壓力傳感器數據獲得人體的重量。本試驗分別對所有受試者進行兩次測試,測試時間間隔 2 天,兩次測試時測試環境明亮、透風,基本視為無環境影響因素,所測得人體初始承重量、最大減重后承重量和人體最大減重百分比如表 1 所示。
把兩次試驗的測試數據使用數據統計分析軟件 SPSS13.0 計算組內相關系數(intraclass corre-lation coefficient,ICC)。測試結果顯示,下肢初始承重量的 ICC 為 0.996,最大減重后下肢稱重量 ICC 為 0.917,人體最大減重百分比 ICC 為 0.803,測試結果的組內相關系數均大于 0.6,說明該訓練系統具有良好的可靠性。
5 討論
下肢減重康復步行訓練作為下肢康復治療的一種有效手段,能有效減輕下肢負荷,幫助患者快速康復,目前已經越來越多地被應用到因運動損傷、車禍、疾病等引起的下肢運動功能障礙患者的物理康復訓練中。
現有的步行訓練系統多采用懸掛直立式減重,重心隨繃帶的擺動易讓人產生不安全感且長時間的訓練易使患者疲憊和被支撐部位不適,本研究開發的壓差式氣動減重康復步行訓練系統采用空氣壓差技術進行減重,支撐力的作用點非常接近人體重心位置,有助于實現平衡,并且患者腰部四周被氣囊環繞,極大地提高了患者使用的安全系數,使下肢的運動更自然,更符合實際生理狀況;向上的提升力可以很容易地迅速調節,其與空氣壓強成正比,可以實現大范圍、精確迅速地調節減重量。
該系統使用時只需患者穿著氣囊短褲,進入訓練器后將四周氣囊框架豎起,操作簡便,同時設有漏氣檢測反饋,氣囊漏氣時會自動補充氣體,同時發出警報保證患者訓練安全。系統還能夠對肌電信號進行檢測,為臨床提供相關數據以評估下肢康復訓練的效果,可使制定的康復訓練方案更加合理;該訓練系統也可以對下肢康復患者的信息進行科學、規范的管理;對訓練的結果生成報告以便于查看。
然而,本研究的步行康復訓練系統尚不能對患者的步行運動過程中的動態平衡功能進行監測和評估,此項功能擬待本課題組未來進一步開發研究。
引言
腦卒中是我國的常見病和多發病,全國每年新發腦卒中患者約 200 萬人,其中約 85% 留有肢體運動功能障礙,70% 以上患者通過早期步行訓練可恢復行走能力,但是對于偏癱等運動功能受損患者,要進行獨立行走訓練是非常困難的[1],要獲得良好的步態和步行速度則更難。在常規的手術、藥物治療之后,能幫助患者快速恢復健康的手段是康復訓練[2-3]。對于下肢康復,醫學上通常是通過重復的特定任務訓練讓患者進行足夠的重復性活動,基于這種方法的訓練已取得良好的臨床效果[4-5]。然而大多數下肢運動功能障礙患者的下肢承重能力較差,需要在減重方式下進行訓練[6]。
不同程度地減少下肢負荷的減重訓練(body weight support training,BWST)是一種有效的康復治療方法[7-8]。患者在減重訓練時減輕了下肢承受重量,能夠使患者保持正確的上身姿勢和步行姿態,并且能夠加強患者下肢肌群的肌力,增強踝關節、膝關節和髖關節的穩定性,促進患者步行運動時各關節、肌群及神經支配的協調性,故對患者步態整體的平衡能力調節非常有效。應用 BWST 對下肢運動功能障礙患者進行以負重、邁步及平衡三要素相結合為主要特點的強化步行訓練,可以使患者步行及平衡能力得以最大恢復[9]。目前用于康復步行訓練的減重方式主要有懸掛減重方式、斜床背部減重方式、水浮力減重方式等[10-12]。其中,懸掛減重方式因采用繃帶在患者身體局部施加向上的作用力容易使患者感到不舒適;而斜床背部減重方式并未實現真正意義上的下肢步行訓練;另外,水浮力減重方式需要穿戴特別制作的衣服在水中訓練,舉升力的高度和重心隨著水位而變化,而且需要水池,故不方便日常訓練使用;因此上述各種減重方式各具有其使用的局限性,限制了它們在臨床中的推廣應用。
此外,表面肌電信號(surface electromyogra-phy,SEMG)是評估神經肌肉功能的定量方法,可用于了解治療前患者受損神經肌肉功能的狀況及觀察治療前后患側神經肌肉功能的改善,以評估治療效果,并根據結果來調整和制定出具有針對性的個體化康復處方[13-14]。合理的下肢減重康復步行訓練系統應由舒適的下肢減重支撐模塊、神經肌肉功能狀況評估模塊、科學的下肢康復訓練軟件等部分組成。
為給下肢運動功能障礙患者提供更有效、舒適的減重步行康復訓練環境,本研究設計研發了壓差式氣動減重康復步行訓練系統。本系統采用空氣壓差(differential air pressure)技術進行減重,以輔助患者站立和行走。訓練時將人體下半身置于密閉氣囊內,由加壓裝置給氣囊增壓,通過調節氣囊內的壓力獲得不同的舉升力,在步行器帶動下,患者可多自由度進行減重步行訓練,同時配備了康復訓練軟件,能夠實現患者表面肌電信號的采集和顯示、患者信息的管理、訓練過程的監測、訓練條件及訓練報告的保存,以更加科學的方式實現康復訓練。本系統采用壓差式氣動減重的設計方案,支撐力作用點接近人體實際重心,具有易于實現站立平衡,與患者生理狀況適配性好、安全性高等特點,同時可實現大范圍、精確迅速地調節減重程度,對步行訓練智能系統的設計提供了新的實現形式,有助于人體康復訓練系統的進一步研究。
1 系統總體設計
該訓練系統主要由步行器、氣壓減重裝置、表面肌電信號采集裝置、康復訓練軟件等組成。步行器能夠精確設定跑步速度、跑步時間等參數;氣壓減重裝置能夠精確地控制患者的減重量;表面肌電信號采集裝置能夠采集患者下肢步行訓練時的表面肌電信號并傳送到上位機;康復訓練軟件能夠實現表面肌電信號的實時顯示、患者信息的管理、訓練過程的監測、訓練條件及訓練報告的保存等功能。系統的總體結構框架如圖 1 所示,已成型的系統整體實物如圖 2 所示。
圖1
系統總體結構框圖
Figure1.
The block diagram of the system
圖2
空氣壓差式減重康復步行訓練系統
Figure2.
The Weight Loss Walking Rehabilitation Training System based on air pressure difference
2 系統硬件設計
2.1 步行器及控制面板設計
如圖 2 所示,本系統將步行器置于氣囊內,由電動機的動力為患者的步行提供助力。設計步行器的步行訓練面積為 101×32 cm2;根據 2010 年國民體質監測報告顯示,成年人平均體重為 70 kg,因此設計步行器的最大承重量為 120 kg[15],以滿足大多數患者的減重步行訓練需求;步行器速度設計為 1~8 km/h,以提供合適的速度范圍,滿足不同患者對不同速度的需要。
為了實現精確控制減重量,在步行器的下方裝有壓力傳感器(TH4801,博通電子技術/合肥)和壓力變送裝置(TH4805,博通電子技術/合肥),如圖 3 所示。兩者結合共同完成對足底壓力信號的濾波、去噪、放大,以得到穩定可信的足底壓力信號,該壓力傳感器誤差精度為±0.05% F.S,由 24 V 直流電源供電,輸出 0~5 V 的模擬電壓對應 0~200 kg 的重量;考慮到步行時對跑帶沖擊的影響,將采集頻率定為 50 Hz,以確保運動時動態測量的精度;為增加壓力測量精度,用 50 kg、100 kg、150 kg、200 kg 的標定砝碼測取對應傳感器信號的電壓值,以此求出線性標定曲線,其線性方程為 y=0.025 3x+0.075 8,其中 y 為電壓值,x 為所測物體質量。
圖3
步行器設計圖
Figure3.
The design of walking device
為調節氣壓減重裝置和步行器的各項參數,該康復訓練系統配有控制面板,如圖 4 所示。該控制裝置可通過控制面板上的按鍵,開始、停止步行器和氣壓減重裝置,設置訓練的速度和減重大小,同時記錄步行器的運行時間以控制下肢康復訓練強度。
圖4
控制面板
Figure4.
The interface of control system
控制面板左側區域主要控制步行器的各項參數,實時狀態顯示在左側的液晶屏幕上;控制面板右側區域主要控制氣壓減重裝置各項參數,減重運行指示燈(RUN)亮表明氣壓減重裝置處于運行狀態,減重停止指示燈(STOP)亮表明氣壓減重裝置處于停止狀態,減重量的大小在右側數碼管顯示。
2.2 氣體壓差減重設計
2.2.1 氣體壓力減重原理 該系統采用了空氣壓差技術來減輕患者下肢所承受的重量。空氣壓力差 ΔP=P2–P1,其中 P2 為氣囊內的空氣壓強,P1 為大氣壓強,他們之間產生一個壓強差 ΔP,該壓強差作用在氣囊和密封短褲所圍成的截面積 S 上,產生一個向上的提升力 F=ΔP·S。這個向上的力與患者所受重力方向相反,可與重力進行部分抵消,以實現減重目的。
2.2.2 氣體壓力控制 減重量大小由氣體壓力的大小控制。該系統的氣體壓力控制采用排氣閥自動調節。該系統的增壓采用鼓風機(RB-400AS,貝雷克機械/中國)持續充氣的方式,其最大靜壓輸出為 11 kPa,流量為 1.5 m3/min,能夠滿足系統對充氣時間和充氣壓力的需求。
為了能夠精確控制氣囊內氣體的壓力,排氣閥采用兩位兩通低壓差比例電磁閥(DS6024,寶得/德國)配以比例-積分-微分控制器(proportion-Integral-Derivative,PID)(MA8611,寶得/德國),比例電磁閥工作曲線如圖 5 所示。通過控制加在其控制端的電壓(0~10 V)以控制比例電磁閥的開度從而控制氣體排放的流量,KVs 是比例閥的最大流量,KV 是對應控制端電壓的實時流量。
圖5
比例電磁閥工作曲線
Figure5.
The working curve of proportional solenoid valve
PID 控制又稱 PID 調節,PID 控制是根據系統的誤差,利用比例、積分、微分計算出輸入值然后進行控制,把系統的輸出值作為反饋,與系統的給定值進行運算后,將所得誤差加到系統的輸入端從而調節系統的輸出值。控制原理如圖 6 所示,系統的輸入值是根據輸出值實時變化,最終構成閉環系統,從而精確地調節系統的輸出值。PID 控制器中的誤差是由給定值 r(t)和實際的輸出值 y(t)所組成。給定值與輸出值之間偏差 s(t)為:
|
PID 的控制規律為:
|
式中 kp 為比例系數,TI 為積分時間常數,TD 為微分時間常數。其中比例環節能夠成比例的反映偏差信號 s(t),通過控制 kp 可以提高系統的穩態精度;積分環節可以用來消除靜態誤差以提高整個系統的精度;微分環節用來反映 s(t)的變化趨勢,以有效加快系統調節速度從而縮短調節時間[16]。
圖6
PID 控制器原理框圖
Figure6.
The block diagram of PID controller
PID 控制器自帶有反饋端,反饋端信號為氣囊內的氣壓值,從而構成閉環調節系統。當設定的氣壓值與實際反饋端的氣壓值不相同時,PID 控制器調節比例閥達到調節排氣流量的目的,直到所設定的氣壓值和實際的氣壓值相等,從而提高了氣囊內氣體壓力的控制精度。
2.2.3 氣體壓力控制硬件電路設計 本文系統的硬件電路主要包括微控制器(microcontroller unit,MCU)模塊、足底壓力及氣體壓力信號采集模塊、氣體壓力控制模塊、加壓裝置模塊、串口通信模塊和電源系統模塊等,整體硬件電路框圖如圖 7 所示。氣壓減重裝置硬件模塊以微控制器(MSP430F149,德州儀器/美國)為核心,重量壓力傳感器以及氣體壓力傳感器把人體重量及氣體壓力信號傳送到信號采集模塊,信號采集模塊經過處理把體重及壓力信號傳送到控制器的模數轉換(analog-to-digital,A/D)模塊轉換為數字信號以供微控制器處理;氣體壓力控制模塊主要由 PID 控制器和比例閥組成,微控制器把設定氣壓值的數字量通過數模轉換(digital-to-analog,D/A)模塊轉換為對應的模擬量傳送到氣體壓力控制模塊完成對氣體壓力的精確控制;加壓裝置模塊主要由鼓風機及其驅動電路組成,微控制器根據串口通信模塊所傳輸的命令通過驅動電路模塊控制加壓裝置的啟動與停止;串口通信模塊主要完成和上位機的串口通信,以使整個系統協調運行。
圖7
氣體壓力控制硬件電路框圖
Figure7.
The hardware circuit diagram of air pressure control
2.3 肌電采集裝置設計
表面肌電信號是經表面電極引導所獲得的神經肌肉系統的生物電時間序列信號。因表面肌電信號的幅值范圍是 2 μV~5 mV,且易受到外界及人體自身其它電生理信號的干擾,故采用三點式電極拾取表面肌電信號[17]。本肌電信號采集裝置由肌電信號放大器(EMG100C,Biopac/美國)和數據采集卡(PCI1716L,研華科技/中國臺灣)組成,其工作原理框圖如圖 8 所示。
圖8
表面肌電采集裝置工作原理框圖
Figure8.
The working principle diagram of surface electromyogram acquisition device
表面肌電信號首先通過前置放大電路完成初級放大,并采用共模反饋消除法進一步提高共模抑制比;工頻干擾存在于空間中,因此設計有 50 Hz 陷波電路以濾除工頻干擾;有效表面肌電信號的頻率范圍是 10~500 Hz,高通濾波電路的截止頻率為 10 Hz,低通濾波電路的截止頻率為 500 Hz;將濾波后的有效表面肌電信號,經 PCI1716L 數據采集卡轉變成數字信號后,再傳送到主控計算機供康復訓練軟件繪制表面肌電信號波形。通過繪制表面肌電信號波形,對患者下肢訓練過程中相關肌肉群肌電信號的幅值變化進行檢測,用以評估下肢康復訓練的效果。
3 康復訓練軟件設計
康復訓練軟件主要的功能包括訓練過程監測、表面肌電信號的采集及顯示、患者信息管理、訓練條件及訓練報告的保存等,其整體工作流程如圖 9 所示。
圖9
康復訓練軟件總體流程圖
Figure9.
The flow chart of rehabilitation training software
患者在訓練之前首先錄入患者信息并保存,以便于患者信息的管理。訓練開始之后訓練界面可以顯示表面肌電信號的波形以監測在下肢康復訓練運動過程中表面肌電信號的變化。訓練結束后該軟件系統可以把訓練數據生成報告保存,以方便實時查看訓練效果。利用軟件系統,可采集 4 路肌電信號,方便對多個部位的肌電信號進行提取,該軟件系統采集的表面肌電信號波形如圖 10 所示。采集表面肌電信號的頻率為 2 kHz,所得信號與肌電測試系統(ME6000,Mega/芬蘭)驗證后波形符合。
圖10
表面肌電信號波形
Figure10.
The waveform of surface electromyogram signal
4 系統減重可靠性測試
本研究招募了 10 名正常受試者利用該系統進行下肢初始承重量、最大減重后下肢承重量、人體最大減重百分比等參數的測試。所有受試者均穿上密封短褲和氣囊密封連接,站立在步行器上,通過讀取步行器壓力傳感器數據獲得人體的重量。本試驗分別對所有受試者進行兩次測試,測試時間間隔 2 天,兩次測試時測試環境明亮、透風,基本視為無環境影響因素,所測得人體初始承重量、最大減重后承重量和人體最大減重百分比如表 1 所示。
把兩次試驗的測試數據使用數據統計分析軟件 SPSS13.0 計算組內相關系數(intraclass corre-lation coefficient,ICC)。測試結果顯示,下肢初始承重量的 ICC 為 0.996,最大減重后下肢稱重量 ICC 為 0.917,人體最大減重百分比 ICC 為 0.803,測試結果的組內相關系數均大于 0.6,說明該訓練系統具有良好的可靠性。
5 討論
下肢減重康復步行訓練作為下肢康復治療的一種有效手段,能有效減輕下肢負荷,幫助患者快速康復,目前已經越來越多地被應用到因運動損傷、車禍、疾病等引起的下肢運動功能障礙患者的物理康復訓練中。
現有的步行訓練系統多采用懸掛直立式減重,重心隨繃帶的擺動易讓人產生不安全感且長時間的訓練易使患者疲憊和被支撐部位不適,本研究開發的壓差式氣動減重康復步行訓練系統采用空氣壓差技術進行減重,支撐力的作用點非常接近人體重心位置,有助于實現平衡,并且患者腰部四周被氣囊環繞,極大地提高了患者使用的安全系數,使下肢的運動更自然,更符合實際生理狀況;向上的提升力可以很容易地迅速調節,其與空氣壓強成正比,可以實現大范圍、精確迅速地調節減重量。
該系統使用時只需患者穿著氣囊短褲,進入訓練器后將四周氣囊框架豎起,操作簡便,同時設有漏氣檢測反饋,氣囊漏氣時會自動補充氣體,同時發出警報保證患者訓練安全。系統還能夠對肌電信號進行檢測,為臨床提供相關數據以評估下肢康復訓練的效果,可使制定的康復訓練方案更加合理;該訓練系統也可以對下肢康復患者的信息進行科學、規范的管理;對訓練的結果生成報告以便于查看。
然而,本研究的步行康復訓練系統尚不能對患者的步行運動過程中的動態平衡功能進行監測和評估,此項功能擬待本課題組未來進一步開發研究。