智能膝關節對膝上截肢患者生理步態的實現具有重要的影響。通過分析正常人生理步態,設計新型液壓阻尼膝關節結構,提出站立相和擺動相的訓練方法。并利用下肢功能模擬與測評裝置,對設計膝關節進行模擬測試,確定假肢膝關節控制目標為擺動相最大彎曲角度介于 60~70°。在 0.8、1.2、1.8 m/s 三種行走速度下,所設計膝關節阻尼器閥門閉合度為 0% 時,擺動相最大彎曲角度分別為(86±2)°、(91±3)°、(97±3)°,閉合度發生變化時,最大擺動彎曲角度均可調整到 60~70° 之間,且所需閥門閉合度百分比分別為 25%、40%、70%,揭示了智能膝關節實現生理步態阻尼調整的規律。
引用本文: 曹武警, 魏小東, 趙偉亮, 孟巧玲, 喻洪流. 基于生理步態的智能膝關節結構設計及訓練方法研究. 生物醫學工程學雜志, 2018, 35(5): 733-739. doi: 10.7507/1001-5515.201703069 復制
版權信息: ?四川大學華西醫院華西期刊社《生物醫學工程學雜志》版權所有,未經授權不得轉載、改編
引言
根據中國第二次全國殘疾人抽樣調查數據推算,我國殘疾人口總數為 8 296 萬人,占全國人口總數的 6.34%,其中肢體殘疾人數 2 412 萬人,截肢者 226 萬人[1-2]。在截肢者人數中,70% 為下肢截肢,下肢截肢分為膝上截肢和小腿截肢,其中膝上截肢人數約占下肢截肢人數的 35%[3]。目前的醫療水平尚不能使殘肢再生,安裝假肢是截肢患者恢復運動功能以及重返社會日常生活最重要的手段。
對于膝上截肢患者,一個完整的下肢假肢包括:適合殘肢的接受腔,膝關節假體,連接踝關節和膝關節的小腿腿管,以及假腳。其中膝關節最為重要和復雜,故關于假肢膝關節的研究一直是重點和難點[4]。傳統的機械阻尼膝關節,只能簡單地滿足行走和站立支撐,阻尼大小不可調且不能隨步速變化,缺少人機環境之間的信息反饋,導致畸形步態,增加截肢患者行走時的能量消耗[5]。智能膝關節是指將微型計算機技術、智能控制技術應用到膝關節力矩的控制上,使膝關節的力矩可以隨著步行速度、關節角度變化而自動調整,從而使步態接近健康人[6]。按照能否提供主動力矩,智能膝關節可分為動力型和被動型[7]。動力型智能膝關節屈伸運動是由電機等外力驅動的;被動型智能膝關節屈伸運動是由大腿殘端帶動的,智能控制系統只是調整膝關節阻尼力矩的大小[8]。
智能膝關節研究的重點在于如何設計機械結構,確定控制策略,制定訓練方法,從而適應不同的行走環境,實現良好的生理步態[9]。國內外學者對智能膝關節均有一定程度的研究。Lambrecht 等[10]設計了一種半驅動式智能膝關節,通過液壓泵和電機實現驅動和非驅動模式,但是液壓閥回路特別復雜,結構笨重;Herr 等[11]研究了磁流變液用于智能膝關節阻尼力矩控制的方法,利用磁流變液運動黏度隨電流大小變化的性質,實現不同速度下膝關節阻尼的調整;Bonnet 等[12]對截肢患者穿戴多軸液壓智能膝關節在不同速度下的步態進行了研究,膝關節最大彎曲角度在不同速度下差異較小;Orhanli 等[13]研究了氣壓智能膝關節的有限狀態機控制,通過生理步態與假肢步態的比較評估假肢的性能;本團隊[14]研究了基于小腦神經網絡模型的智能膝關節控制策略,通過健康腿信號的測量實現步態的跟隨與控制;李偉[15]設計了一種基于單電機控制閥門開度、調節液壓阻尼的智能膝關節,但是其彎曲阻尼與伸展阻尼的調節并不獨立;楊敏等[16]設計并制作了擺動式缸體的四連桿膝關節,通過四桿機構和阻尼可控的擺動汽缸,實現運動軌跡對速度的自適應。
當前智能膝關節研究多是性能對比研究,即截肢者分別穿戴已有智能膝關節與傳統機械膝關節進行特定參數對比,而關于新型膝關節結構設計及訓練方法的研究則相對較少。本研究旨在通過分析正常人生理步態,確定膝關節阻尼調整的控制目標,針對步態周期內相位轉換的特點,提出智能膝關節站立相和擺動相的訓練方法,利用液壓阻尼特點與人體行走時膝關節阻尼力矩的相似性,設計一款新型的單軸液壓膝關節結構,并根據假腿的人機交互要求,提出膝關節功能模擬與測評裝置,替代人體穿戴膝關節的主觀感受,提高膝關節性能評估的客觀性。通過模擬測試實驗,研究膝關節實現生理步態所需阻尼調整的規律。
1 材料與方法
1.1 正常人生理步態研究
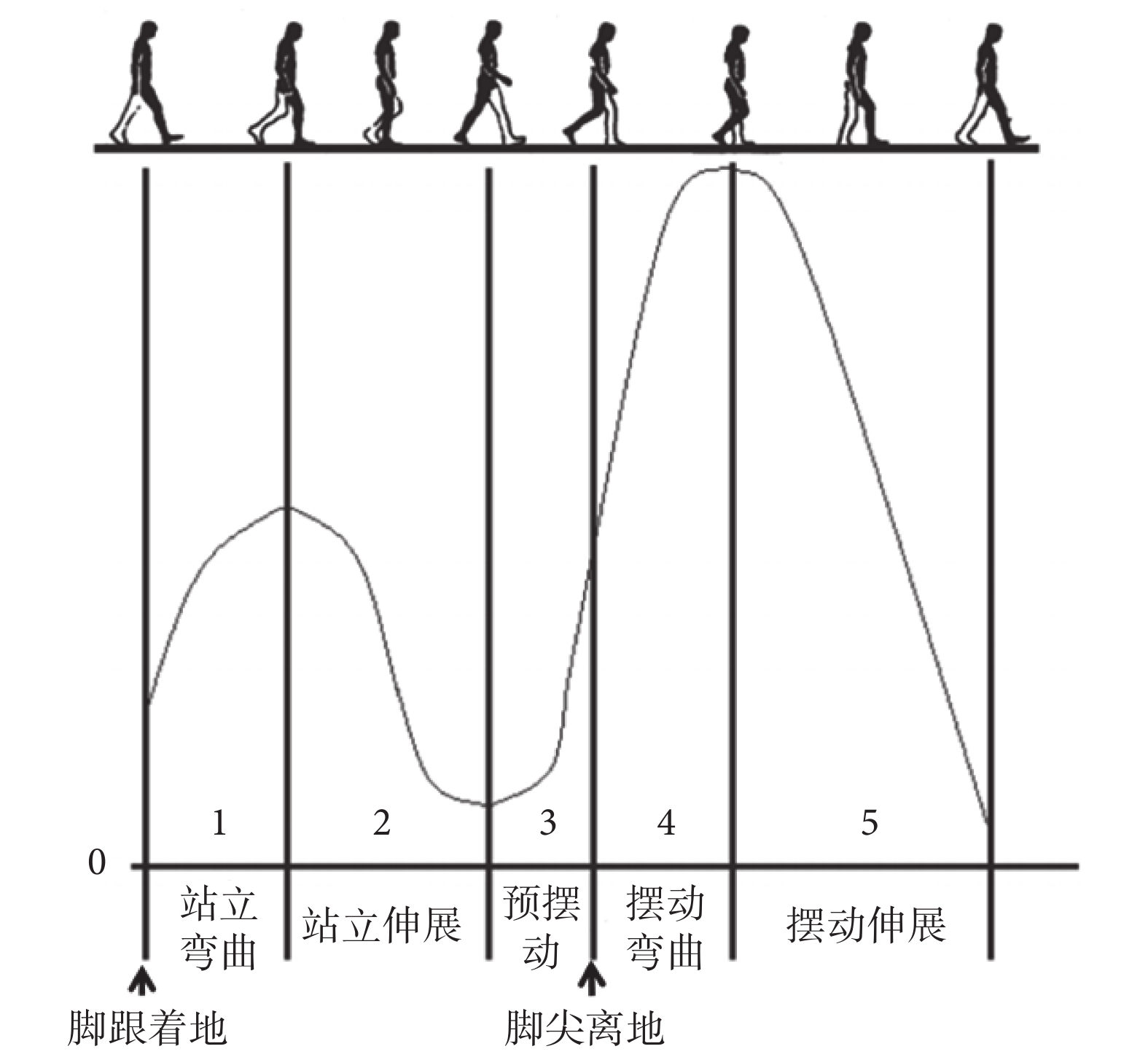
結合相關研究可知,一個步態周期可分為 5 個不同的相位:站立相彎曲、站立相伸展、預擺動、擺動相彎曲、擺動相伸展[17-19]。腳跟著地為一個周期開始,膝關節預屈曲,以減少地面反作用力所造成的沖擊,穩定站立相身體重心的高度。站立相膝關節彎曲到最大角度后,進行站立相伸展,直到伸展完成。站立相末期,支撐腿再次彎曲為擺動相離地做準備,稱為預擺動,此時對側腳著地,處于雙腳支撐狀態。當髖關節處于彎曲狀態,膝關節彎曲到一定角度,腳尖離地,膝關節繼續彎曲,進入擺動相,當膝關節擺動相彎曲到最大角度,膝關節開始伸展,當膝關節完全伸展,腳跟再次著地,進入下一個周期。正常人的步態劃分如圖 1 所示。
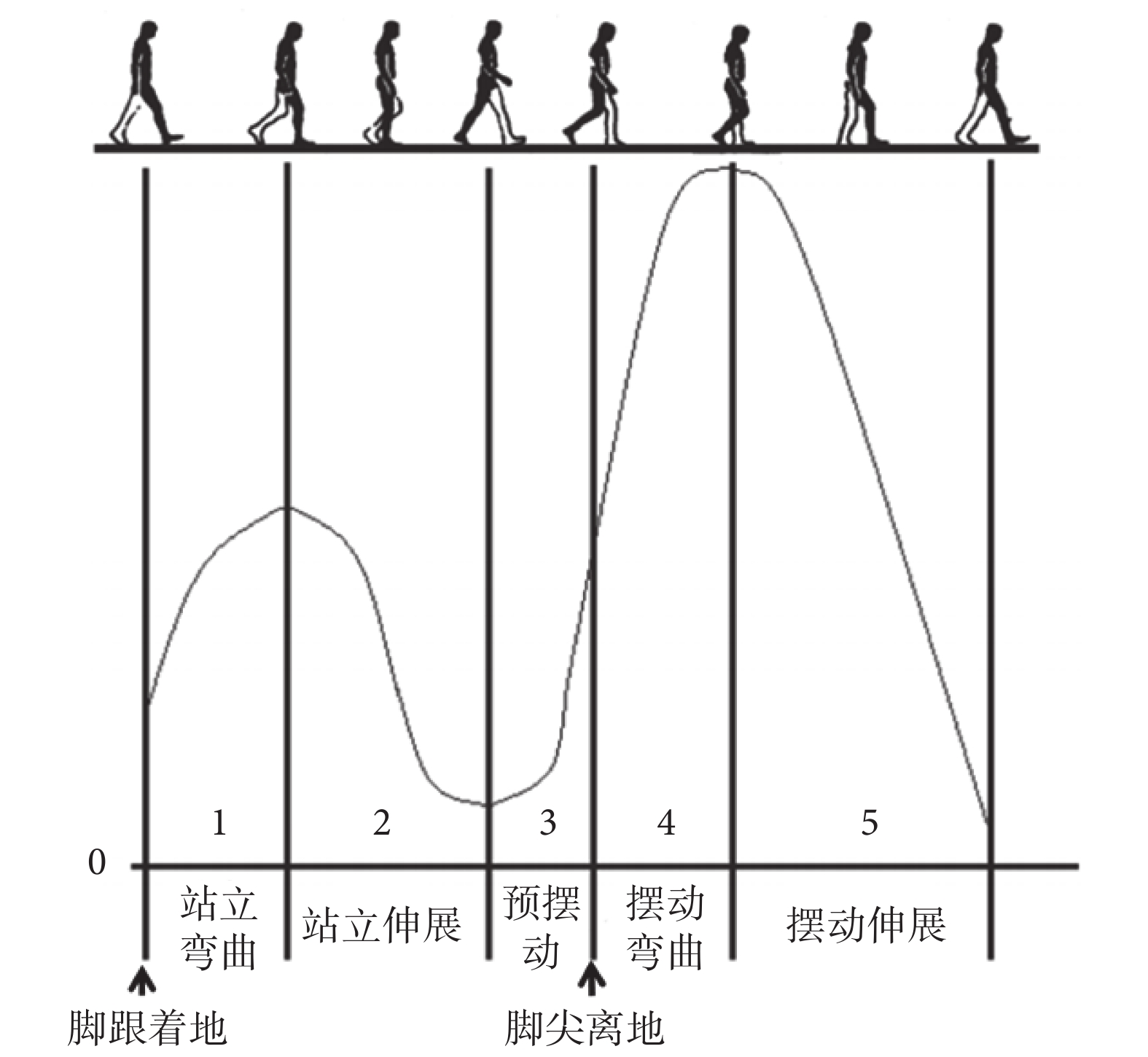 圖1
正常人一個行走周期的步態劃分
Figure1.
Gait classification of a walking cycle of normal people
圖1
正常人一個行走周期的步態劃分
Figure1.
Gait classification of a walking cycle of normal people
擺動相最大彎曲角度對假肢穿戴者的步態影響很大。若該角度過大,則容易造成下一步腳跟著地時小腿還未伸直,在這種條件下,假肢穿戴者被迫通過降速或者擺動伸展時用力甩動來防止跌倒,這會造成穿戴者的不適和能量消耗的增加。因為擺動相最大彎曲角度實際代表著腳尖的最大離地高度,若此角度過小,則膝關節擺動伸展時會增大腳尖觸地絆倒的風險。此外,若假肢側擺動相最大彎曲角度與健康腿側有較大的差異,則會造成動態行走時的不美觀。Inman 等[20]在研究中指出,正常行走過程中,最大擺動彎曲角度通常不超過 70°。但是其研究對象為歐洲人,是否同樣適用于亞洲人尚有待證明。因此,通過健康人生理步態的測試研究,確定合理的智能膝關節擺動相最大彎曲角度范圍是一項重要的內容。受試者個人數據信息如表 1 所示。所有測試參與者均在實驗開始之前被詳細告知了實驗內容,在知情同意的情況下參與該項研究。該實驗方法與準則得到了上海健康醫學院倫理委員會的審批通過。
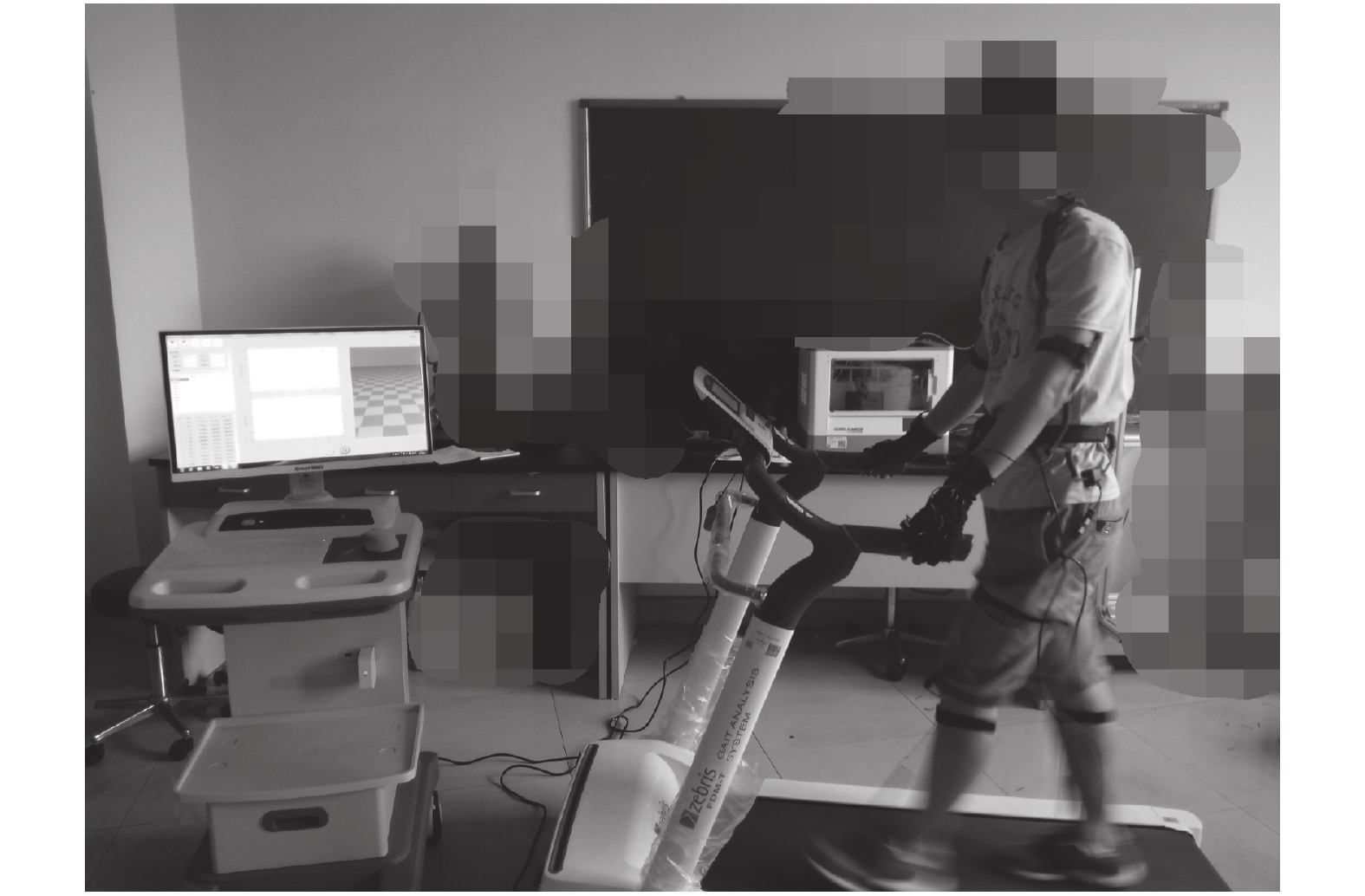 圖2
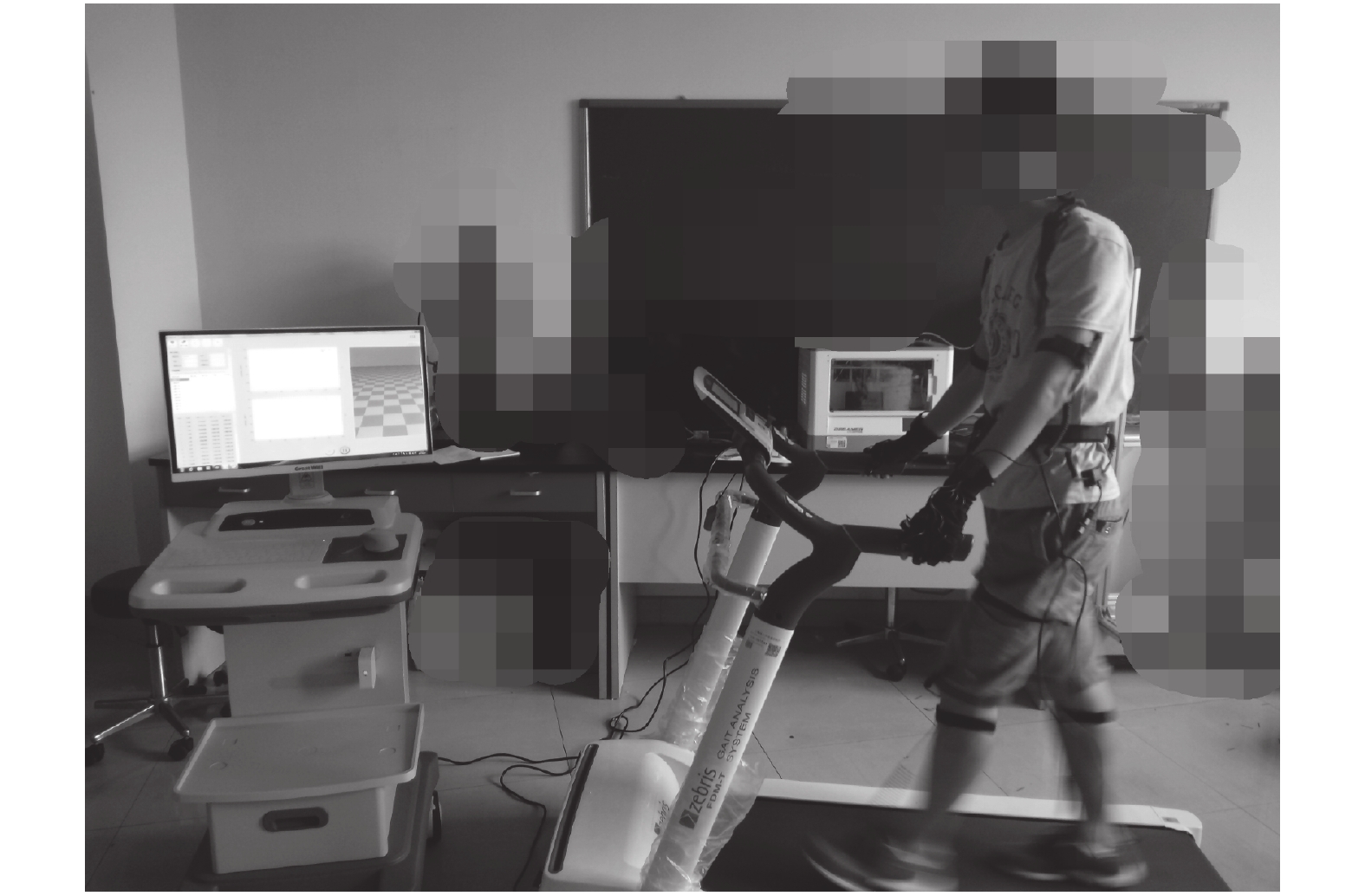
下肢姿態和關節角度信息測量
Figure2.
Measurement of lower limb posture and joint angle
圖2
下肢姿態和關節角度信息測量
Figure2.
Measurement of lower limb posture and joint angle
每名受試者均在跑步機上以慢速(0.8 m/s)、中速(1.2 m/s)、快速(1.8 m/s)三種行走速度持續行走,受試者運動信息參數通過 RealGait(江蘇德長全身三維步態與運動分析系統)獲得,其包含 17 個全身一體化傳感器,可實時捕捉和分析步態及全身所有關節主要運動。傳感器位置及實際測量如圖 2 所示。
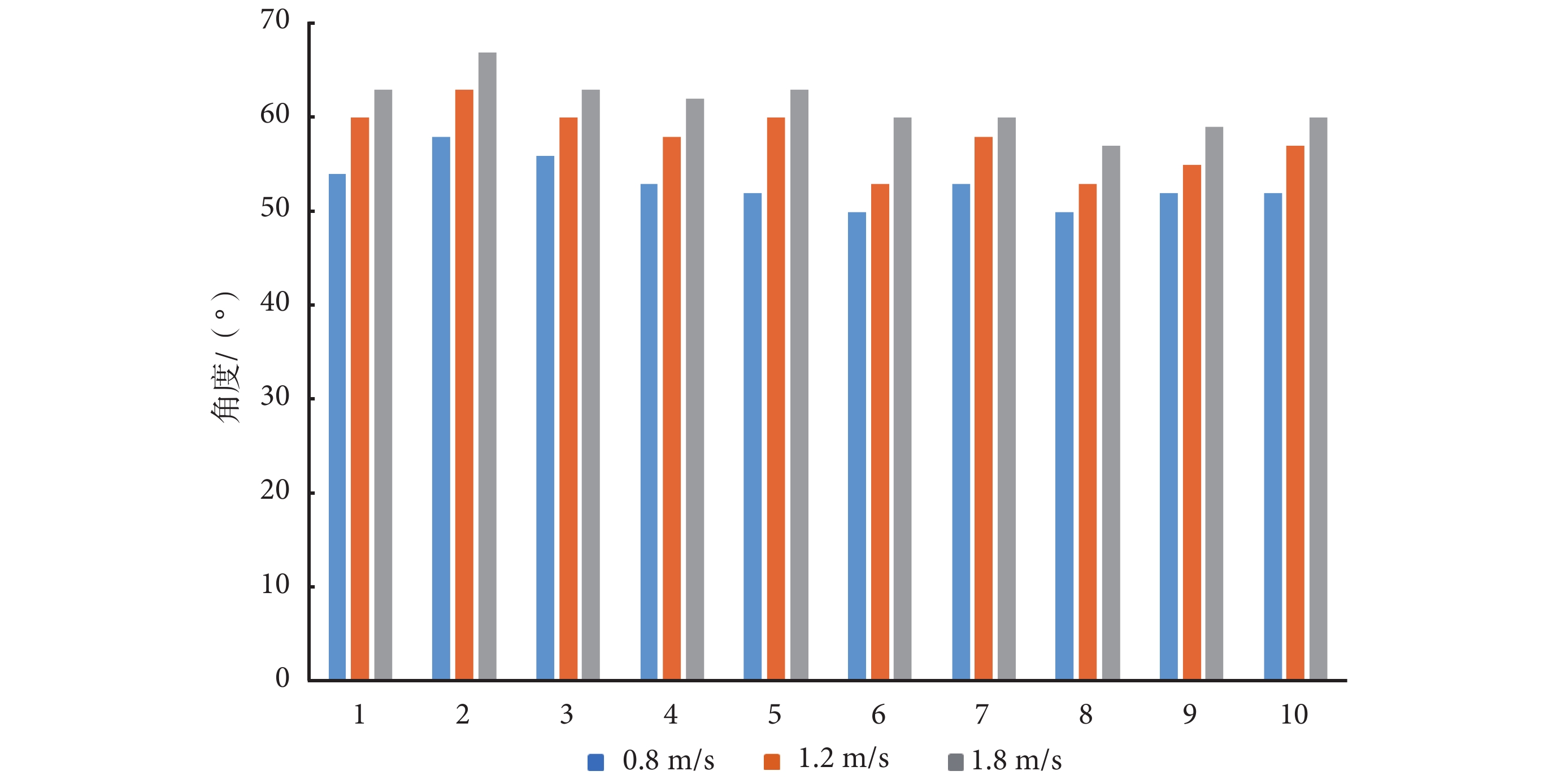
每名測試者在三種不同速度下的擺動相最大彎曲角度如圖 3 所示。十名受試者在三種速度下的擺動相最大彎曲角度均介于 50~70° 之間。可見擺動相最大彎曲角度與個體差異、速度變化的相關性不大。由于假肢的安全性應放在首位,為降低腳尖觸地絆倒的風險,假肢膝關節的擺動相最大彎曲角度應較健康人有所提高,故確定控制目標為不同速度下膝關節擺動相最大彎曲角度介于 60~70°。
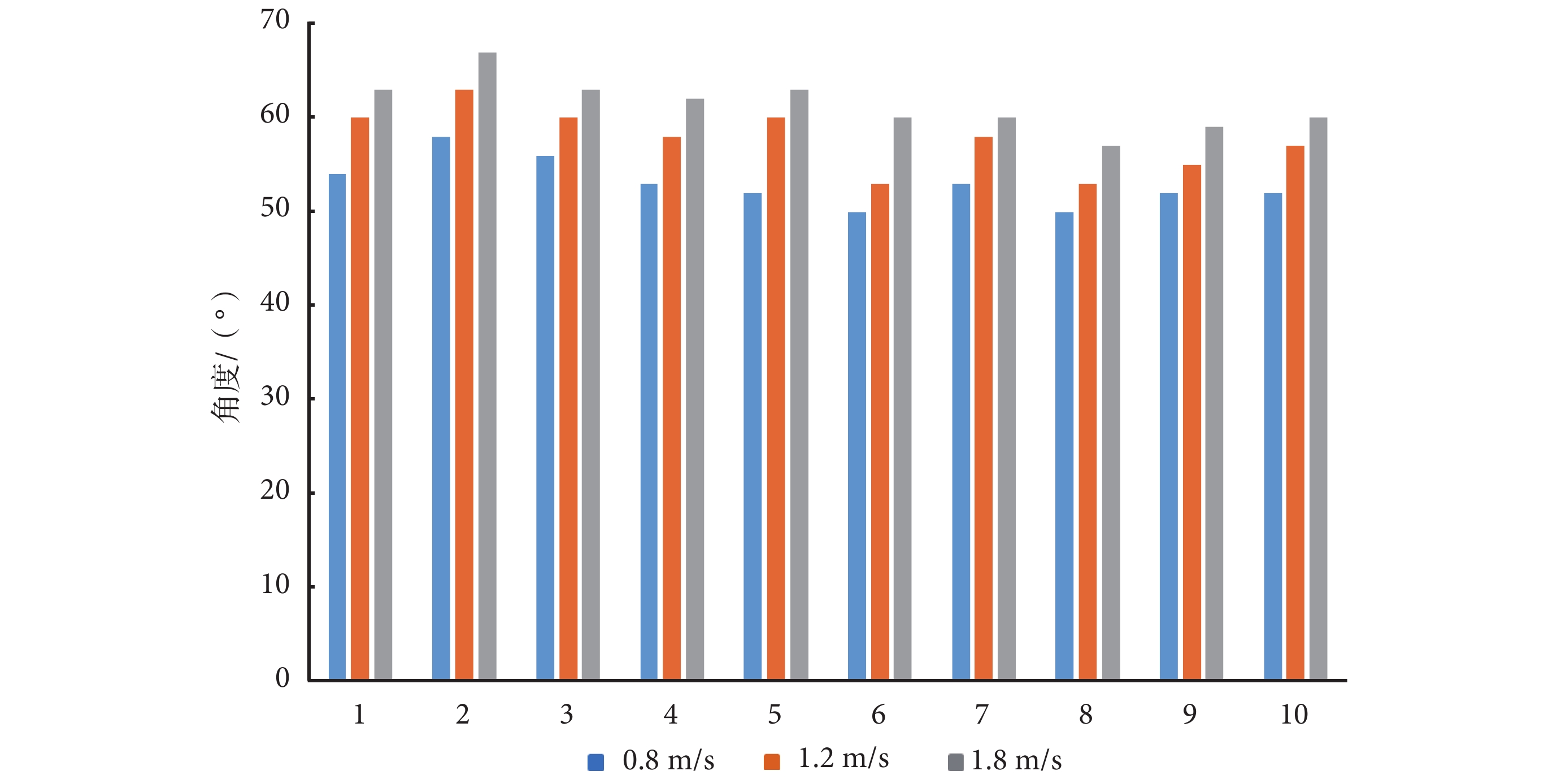 圖3
不同速度下受試者擺動相最大屈曲角度
Figure3.
Maximum swing flexion angle under different speeds
圖3
不同速度下受試者擺動相最大屈曲角度
Figure3.
Maximum swing flexion angle under different speeds
1.2 智能膝關節設計
1.2.1 機械結構
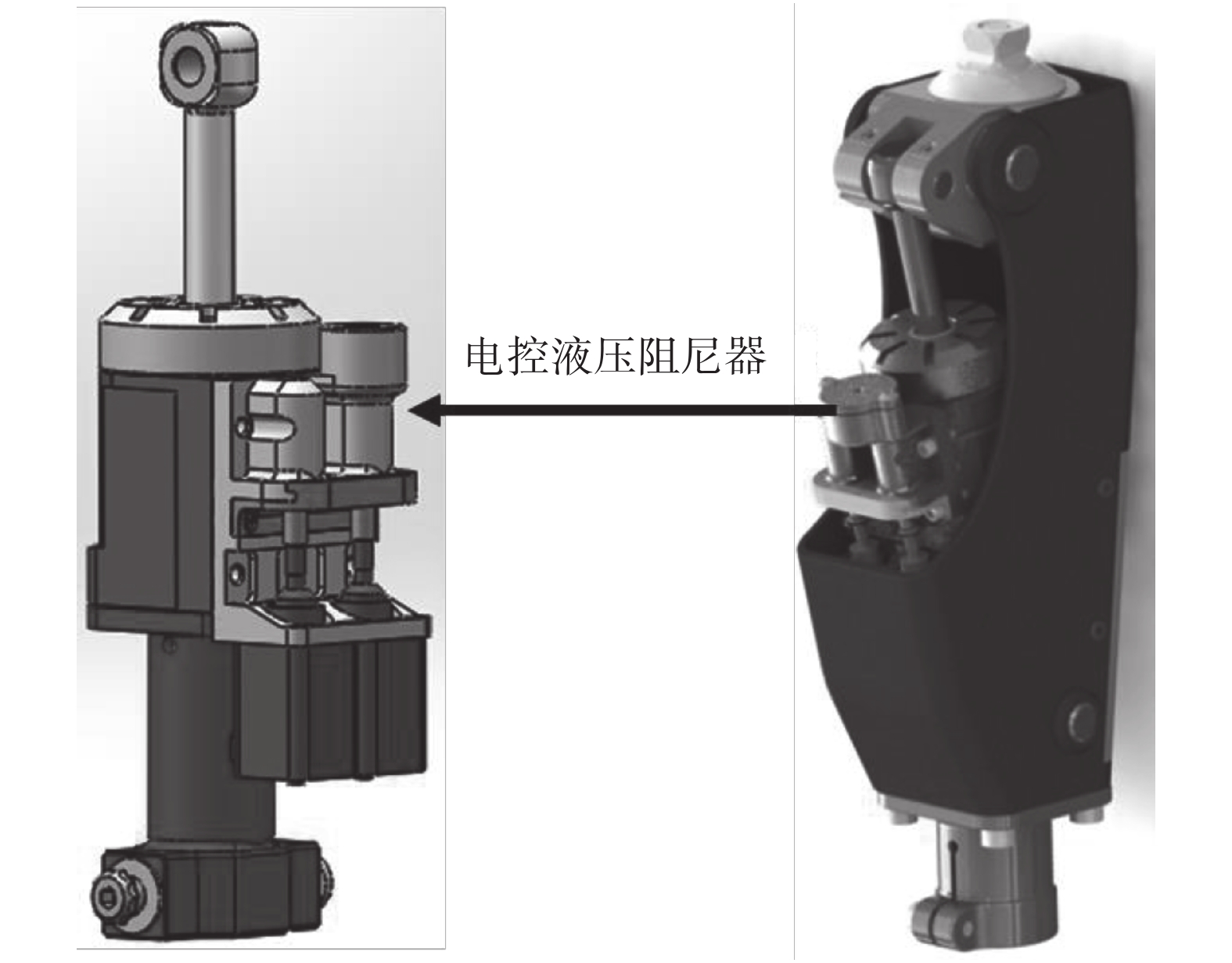
液壓及氣壓智能膝關節均是通過微處理器控制電機,調節阻尼器內部閥門開度大小,以實現阻尼的調整;磁流變智能膝關節則是通過改變電流大小,進而改變磁場強度,使磁流變液黏度發生變化,從而調節阻尼,但是在強電場、磁場附近則不適用,限制了穿戴者的應用范圍。液壓阻尼器在體積較小時,仍可以提供很強的阻尼,可有效保證支撐相的穩定性,多用于單軸膝關節。液壓阻尼隨著流速的變化呈現出不同的性質,層流時阻尼與速度呈線性,湍流時則阻尼的增大呈非線性。因此,不同速度下擺動相膝關節阻尼力的調整,可通過改變液壓油通流面積制造湍流,實現阻尼力矩的快速適應與控制,對膝關節擺動相生理步態的獲得十分有益,因此設計了單軸液壓膝關節結構,如圖 4 所示。
為實現膝關節屈曲與伸展阻尼的獨立調節,采用雙電機帶動流量調節閥門,分別改變屈曲和伸展流道流速。為確保屈曲油道阻尼與伸展油道阻尼互不影響,分別在兩個油道中放置單向截止閥,當膝關節屈曲,活塞向下運動時,伸展油道中的單向閥門截止,屈曲油道中的單向閥門打開,液壓油只能通過屈曲調節油道從下腔進入上腔;當膝關節伸展,活塞向上運動時,屈曲油道中的單向閥門截止,伸展油道中的單向閥門打開,液壓油只能通過伸展調節油道從上腔進入下腔。為實現膝關節伸展時的助力,液壓缸底部彈簧殼中置有助伸彈簧。
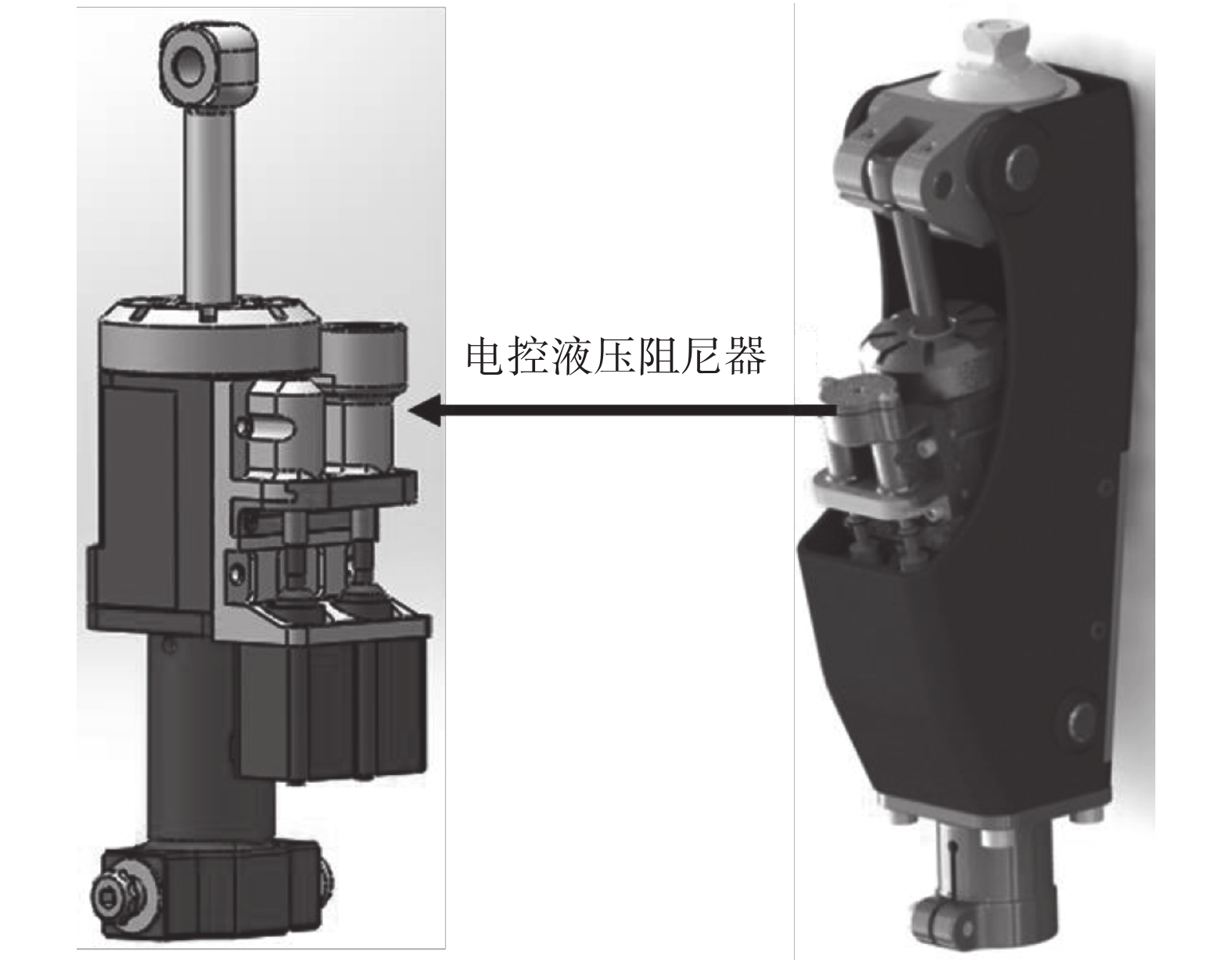 圖4
液壓智能膝關節
Figure4.
Microprocessor-controlled prosthetic knee with hydrau lic damper
圖4
液壓智能膝關節
Figure4.
Microprocessor-controlled prosthetic knee with hydrau lic damper
在每一個相位狀態內,控制液壓阻尼器閥門的開度調節液壓油的流速,從而控制膝關節的阻尼力矩,阻尼力矩的大小正比于膝關節角速度的平方,
 |
其中 M 是膝關節阻尼力矩,V 是膝關節角速度,通過對膝關節角度信號求導獲得,C 是膝關節動態阻尼常數。在一個給定的步行周期內,控制五個閥門開度,即五個不同的阻尼常數值,實現五個相位的適應與調整。只在步態相位轉換或者周期改變時,對阻尼值進行調整,在一個確定的步態相位內,阻尼常數不作調整。智能膝關節自適應控制系統的目的是確定適應于相位狀態的阻尼常數,也即是狀態轉換時控制合適的閥門開度,從而達到生理步態。
1.2.2 傳感器系統
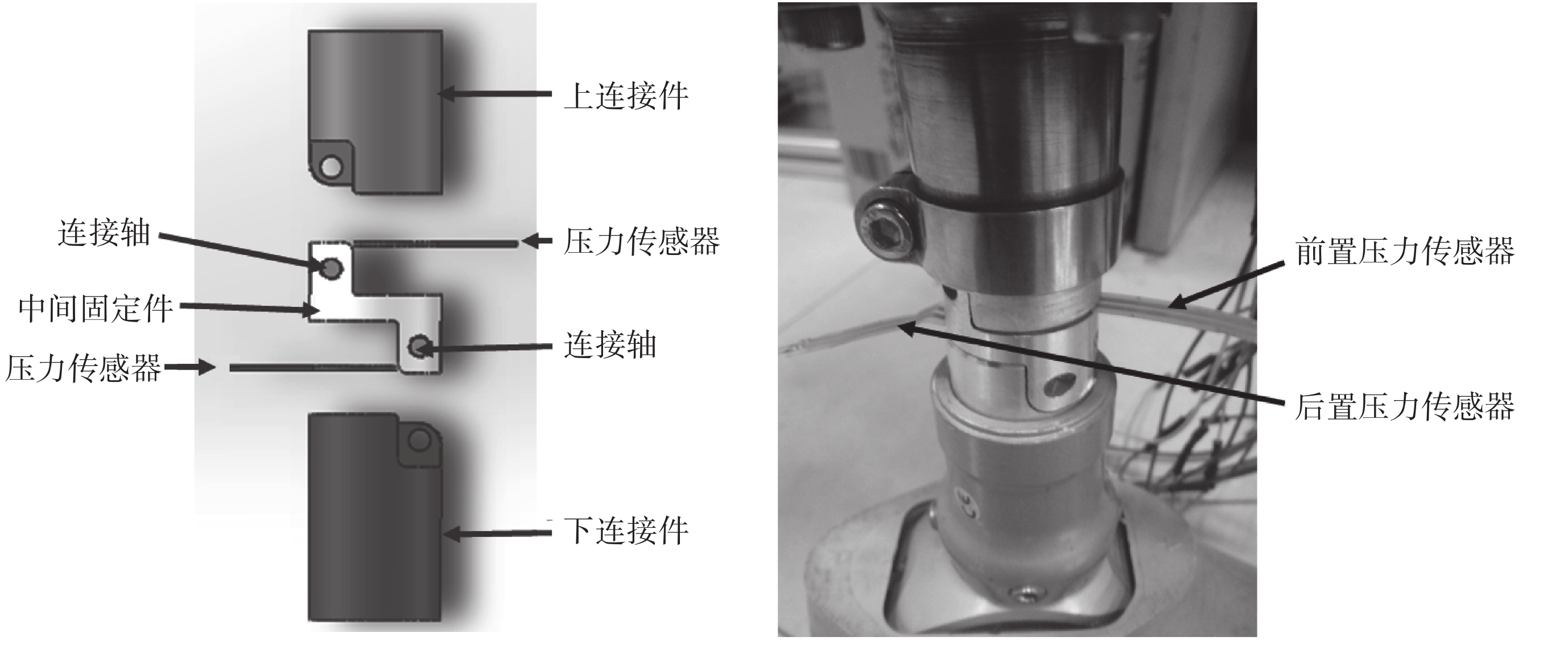
用于下肢智能假肢步態相位識別的傳感器主要包括:膝關節角度傳感器、加速度計、壓力傳感器、踝關節多維力傳感器。多維力傳感器成本較高,在腳底安裝壓力傳感器,通過開關信號識別腳跟著地和腳尖離地是步態相位識別的常見方法,但是該方法不利于鞋子的更換,且不適用于外界復雜的腳底環境,難以應用于產品。為實現低成本且不受鞋子更換影響的步態相位識別,設計了專用的小腿腿管,如圖 5 所示。整個傳感器系統包括膝關節角度傳感器以及腿管前后兩個薄片式壓力傳感器。當腳跟著地相位 1 觸發時,壓力信號為(1,0);當站立屈曲至最大角度,腳掌完全著地相位 2 觸發時,壓力信號為(1,1);當腳跟離地相位 3 觸發時,壓力信號為(0,1);當腳尖離地相位 4 觸發時,膝關節角速度為正且壓力信號為(0,0);當擺動屈曲至最大角度相位 5 觸發時,膝關節角速度為負且壓力信號為(0,0)。
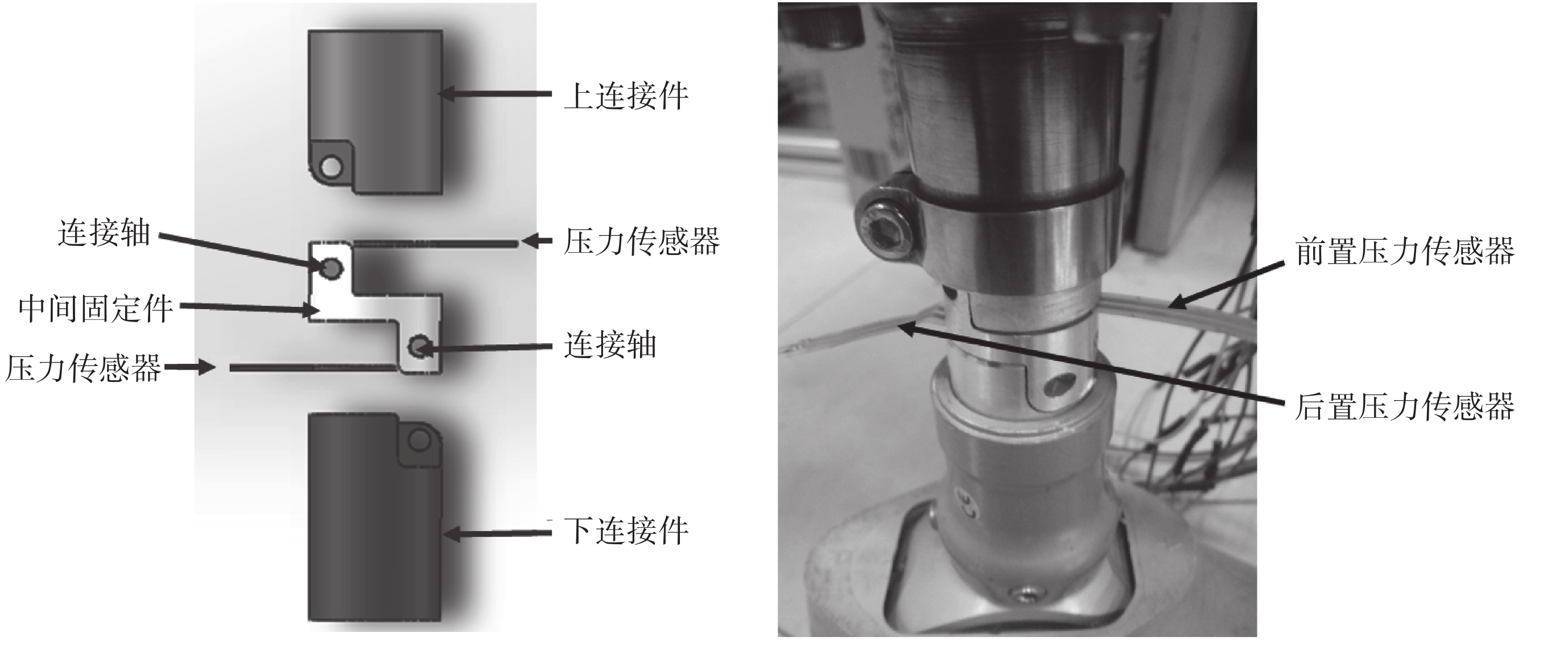 圖5
小腿腿管壓力傳感器結構
Figure5.
Pressure sensors in shank tube
圖5
小腿腿管壓力傳感器結構
Figure5.
Pressure sensors in shank tube
1.3 相位控制訓練方法
1.3.1 站立相控制訓練方法
站立相包括狀態 1、2、3。在狀態 1,即站立彎曲時,假肢膝關節需要提供較高的阻尼力,以防體重導致的彎曲跌倒;在狀態 2,即站立伸展時,假肢膝關節也需要提供較高的阻尼力,進行伸展減速,以防過伸,導致膝關節旋轉塊與接受腔發生碰撞。站立相阻尼力的大小取決于膝關節所受的最大軸向力,最大軸向力越大,膝關節站立相彎曲和伸展阻尼力的值也應越大,即液壓閥門開度越小。
當截肢患者第一次穿戴上膝關節假肢行走時,狀態 1 的阻尼力設為很大,即液壓彎曲閥門開度很小,不會發生因彎曲阻尼過小導致的跌倒,確保行走的安全。狀態 2 的阻尼設為很小,此處使伸展閥門完全打開,即確保截肢患者能夠順利伸展。當穿戴者行走了一段距離后(可設為 20 步),狀態 1 和 2 的阻尼值設為正比于站立相的平均最大軸向力。使用此種控制方法,無需對膝關節輸入穿戴者任何的特定信息,使用膝關節上的傳感器獲得的傳感信息即可實現站立相彎曲和伸展阻尼的自適應控制。對于狀態 3,膝關節彎曲阻尼設為最小,即彎曲閥門完全打開,使穿戴者擺動最為省力。
1.3.2 擺動相控制訓練方法
穿戴者的行走速度,與假肢腳掌接地時間有關。站立相時,膝關節傳感器測量一個隨運動速度變化的參數,此處使用假肢腳掌接地時間。當穿戴者行走速度加快時,腳掌接地時間會下降。膝關節處理器中存儲有生理步態所有運動速度對應的腳掌接地時間,0~2 s 的時間范圍涵蓋了所有速度下對應的腳掌接地時間,將 2 s 以 40 ms 作為間隔分成 50 份,當穿戴者的速度變化時,對應接地時間所處的時間段也發生變化。狀態 4 的控制目標是擺動相的最大彎曲角度,當穿戴者行走第一步時,將擺動相彎曲阻尼設為最小,即彎曲閥門完全打開,此時擺動的角度與所設定的目標最大彎曲角度有差異,在隨后的步行中,根據差值逐漸增大阻尼,即彎曲閥門開度逐漸減小,直到達到目標設定的最大彎曲角度,此時彎曲閥門的開度即為此速度下實現生理步態的開度,存入處理器。不同速度下 4 狀態彎曲閥門開度均由此方法獲得,訓練過程完成后,即可根據行走速度直接調用訓練產生的存儲數據值。當膝關節由狀態 4 到 5,即膝關節從最大彎曲角度到完全伸展過程中,第一步伸展阻尼設置為最小,即伸展閥門完全打開,確保膝關節能夠完全伸展,在隨后的步行中,伸展阻尼逐漸增大,即伸展閥門開度逐漸減小,狀態 5 伸展阻尼的大小與狀態 4 彎曲阻尼的大小相關,彎曲阻尼越大,伸展阻尼也越大,伸展阻尼與彎曲阻尼的函數關系通過實驗獲得。當穿戴者以不同速度進行行走訓練時,記錄不同速度下狀態 5 閥門的訓練開度。
2 智能膝關節模擬測試
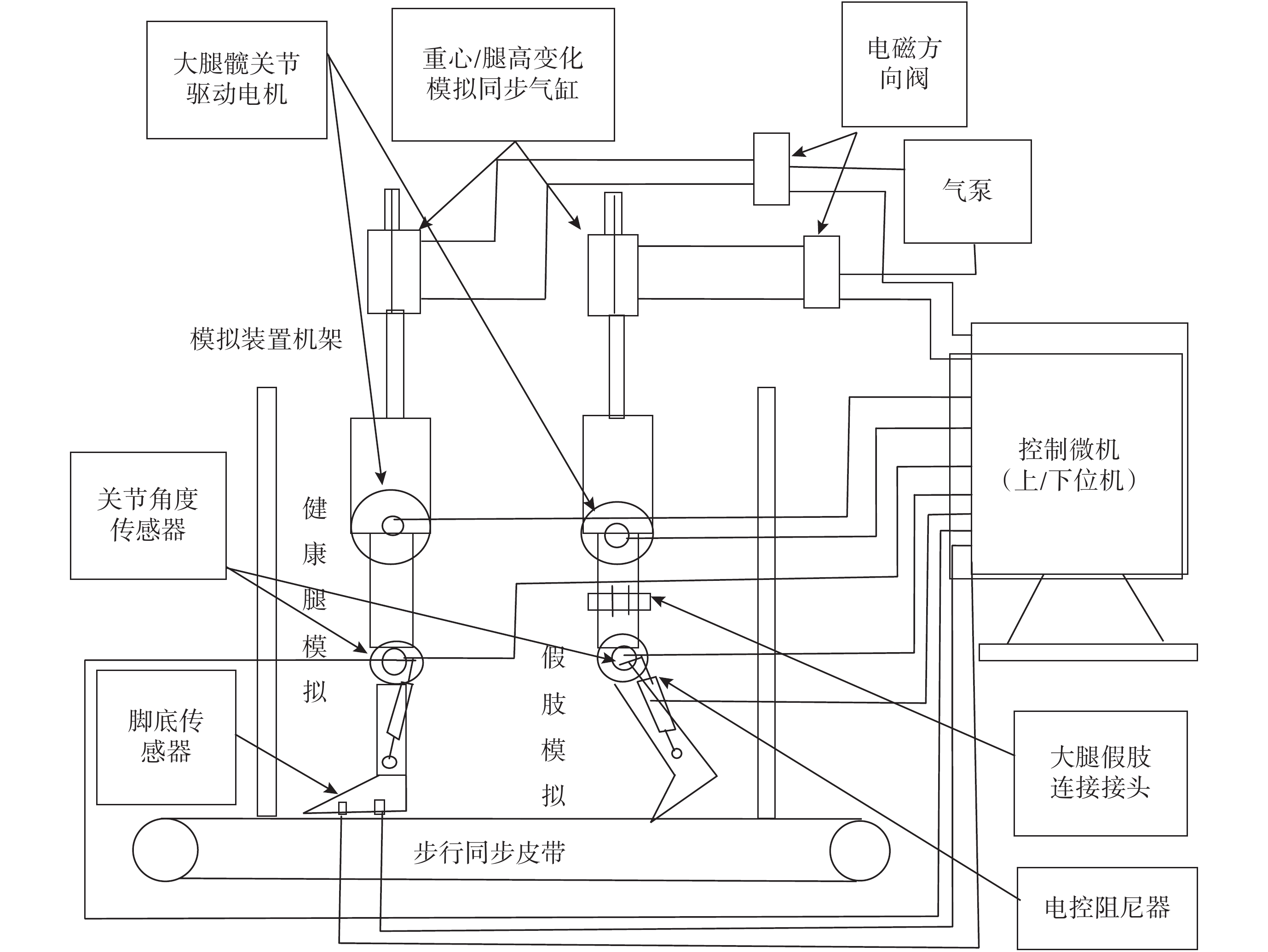
假肢功能模擬與測試過程中,人體試驗安全性及可重復性比較低,通過機器測試系統可以完成一些人體不方便參與或者有一定危險的評估測試。為了對下肢假肢進行功能評價,根據假腿人機系統的主要功能要求,以同步步行帶模擬假肢的平地行走,以升降氣壓缸模擬人體行走的重心上下變化,實現智能假腿行走時功能的模擬,模擬與測評系統構成如圖 6 所示。
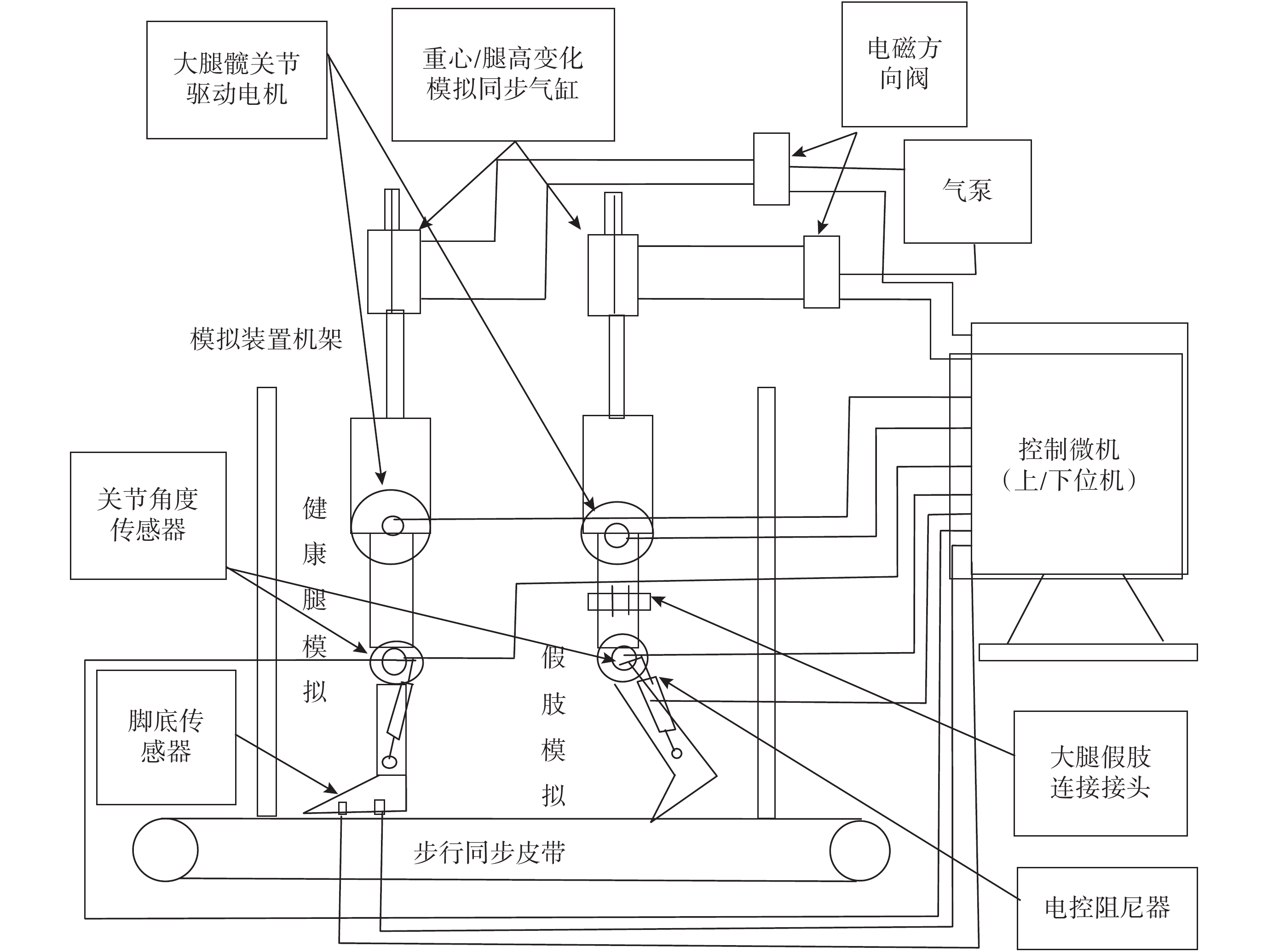 圖6
下肢假肢功能模擬與測評系統
Figure6.
Function simulation and evaluation system of lower limb prosthesis
圖6
下肢假肢功能模擬與測評系統
Figure6.
Function simulation and evaluation system of lower limb prosthesis
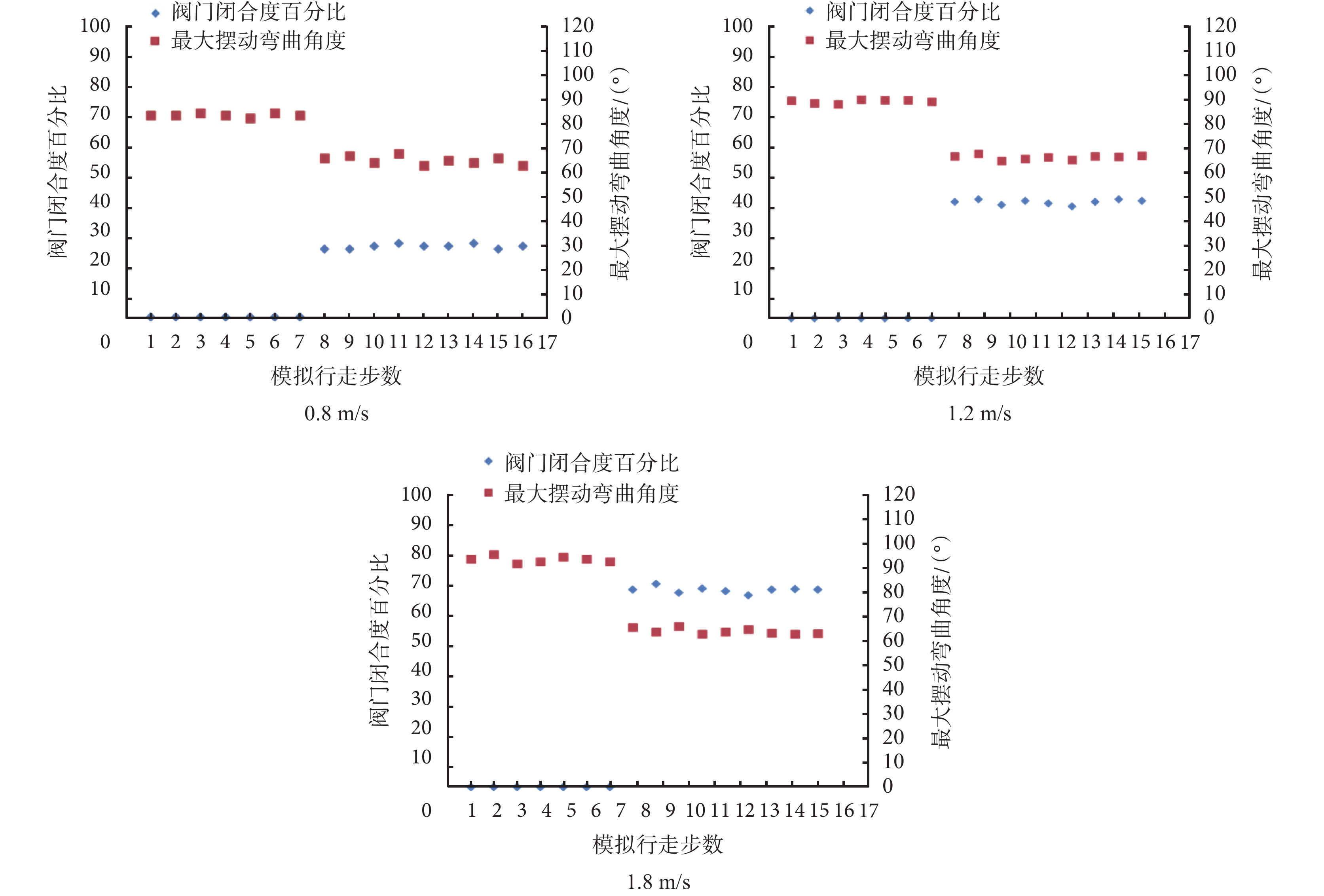
將所設計膝關節通過特定接頭安裝在假肢側髖關節下部,為了對比智能膝關節自動調整阻尼后與未調整時對膝關節擺動相最大屈曲角度的影響,前 7 步為不施加阻尼控制狀態,彎曲閥門完全打開,后 10 步則為阻尼自動調整之后狀態,通過膝關節角度傳感器記錄每一步的擺動相最大屈曲角度,當同步帶速度分別固定為 0.8、1.2、1.8 m/s 時,膝關節彎曲阻尼調整的適應性及最大擺動彎曲角度如圖 7 所示。
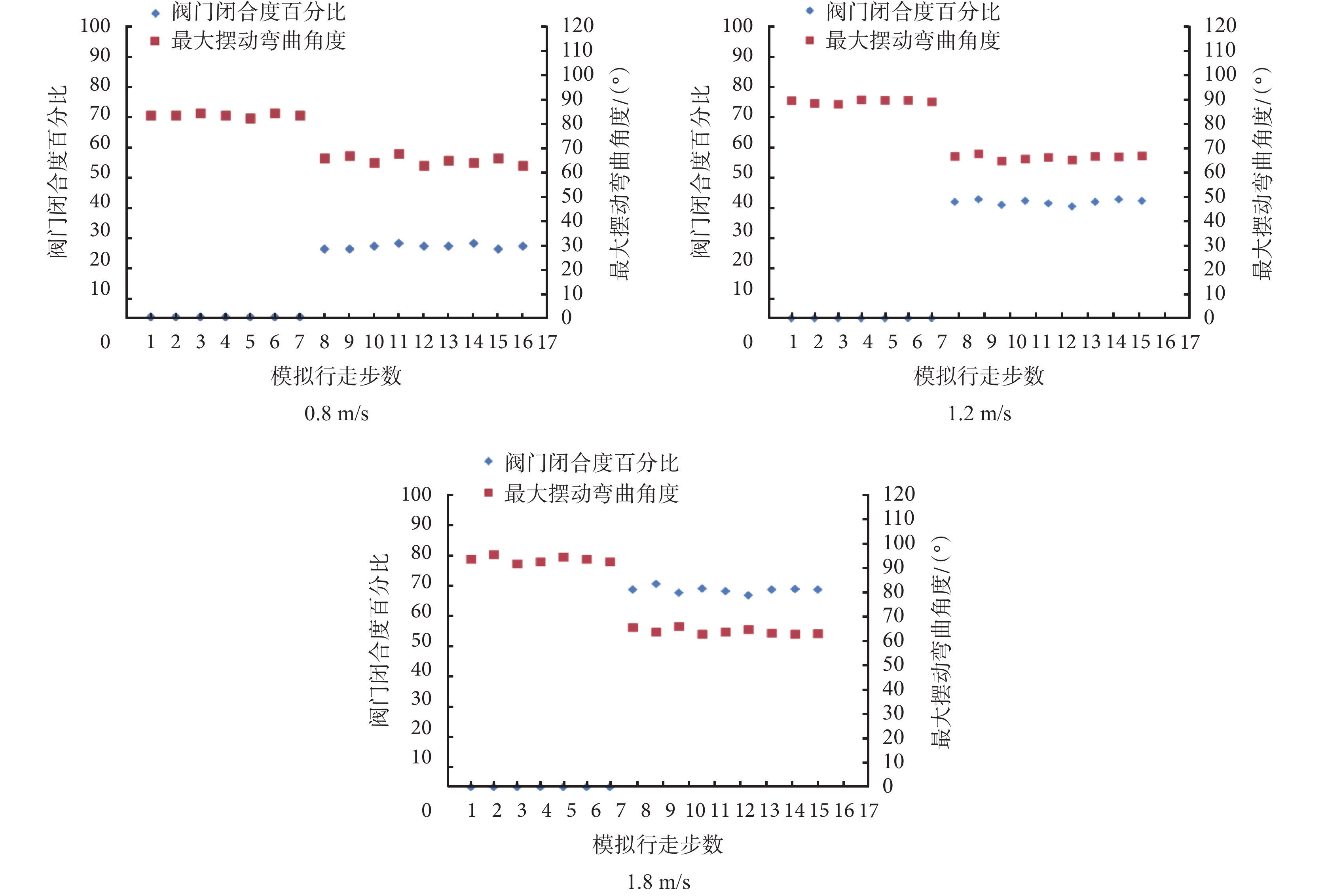 圖7
不同速度下彎曲阻尼調整及最大擺動彎曲角度
Figure7.
Maximum swing-phase knee flexion angle and flexion damping adjustment with different speed
圖7
不同速度下彎曲阻尼調整及最大擺動彎曲角度
Figure7.
Maximum swing-phase knee flexion angle and flexion damping adjustment with different speed
當液壓阻尼器彎曲閥門閉合度為 0%,即前 7 步時,膝關節在 0.8、1.2、1.8 m/s 速度下擺動相最大彎曲角度分別為(86 ± 2)°、(91 ± 3)°、(97 ± 3)°,即彎曲阻尼閥門完全打開時,不同速度下擺動相最大彎曲角度隨著速度的增加而增大。在三種速度下,當阻尼器閥門閉合度發生變化時,最大擺動彎曲角度均可調整到 60~70° 之間,即不同速度下均可實現生理步態。在 0.8、1.2、1.8 m/s 速度下,膝關節最大擺動彎曲角度調整到 60~70° 之間所需的閥門閉合度百分比分別為 25%、40%、70%,即不同速度下調整到生理步態所需的閥門閉合度百分比也發生變化,速度越大,閉合度百分比越大,即閥門開度越小。
3 討論與結論
在正常行走過程中,膝關節大部分時間充當阻尼器,但是在上坡、上樓梯等需要主動力矩的情況下也需要主動發力做功。液壓被動阻尼式假肢在無需主動力矩情況下雖然具有較好的阻尼性能,但是仍然不能提供主動力矩,設計動力源與阻尼器結合的主被動混合結構是重要的研究方向。在后續研究中,計劃將電機驅動或者微型泵與當前阻尼器結構結合,以進一步提高仿生性。
膝關節的相位控制訓練方法雖然適用于不同穿戴者,但是前期患者參數評定的正確性會對膝關節的性能造成影響,膝關節的智能控制無法補償因前期對線調整的偏差,因此正確的對線及患者參數測量十分重要。
下肢假肢功能模擬與測試裝置雖然能夠提高假肢性能評價的客觀性,但是該研究中的路況較為單一,僅是以同步帶模擬了平地行走,其在上下坡、上下樓梯、跨越障礙等復雜路況下的工作性能還有待研究。
生理步態的指標不止一種,步態對稱性、擺動相最大彎曲角度以及行走時的能量消耗均是重要指標。本研究以膝關節擺動相最大彎曲角度作為控制對象,達到了良好效果,但是其應用于步態對稱性等其他指標時的效果尚有待進一步研究,因此所涉及測試平臺包含有健康腿模擬模塊,在后續研究中將會探討其行走時的左右對稱性等指標。
智能膝關節設計的最終目的是減少穿戴者的能量消耗,實現生理步態。本研究通過生理步態一個周期內狀態相位的劃分及轉換條件的確定,提出了站立相和擺動相的相位訓練方法。在測量健康人行走時擺動相最大彎曲角度范圍的基礎上,確定了不同速度下擺動相最大彎曲角度的范圍,并以此作為控制目標,在功能模擬與測評裝置上對所設計膝關節進行了測試。測試結果表明:彎曲阻尼閥門完全打開時,不同速度下擺動相最大彎曲角度隨著速度的增加而增大;不同速度下均可實現生理步態,但是不同速度下調整到生理步態所需閥門閉合度百分比有所差異,速度越大,閉合度百分比越大,即閥門開度越小。
引言
根據中國第二次全國殘疾人抽樣調查數據推算,我國殘疾人口總數為 8 296 萬人,占全國人口總數的 6.34%,其中肢體殘疾人數 2 412 萬人,截肢者 226 萬人[1-2]。在截肢者人數中,70% 為下肢截肢,下肢截肢分為膝上截肢和小腿截肢,其中膝上截肢人數約占下肢截肢人數的 35%[3]。目前的醫療水平尚不能使殘肢再生,安裝假肢是截肢患者恢復運動功能以及重返社會日常生活最重要的手段。
對于膝上截肢患者,一個完整的下肢假肢包括:適合殘肢的接受腔,膝關節假體,連接踝關節和膝關節的小腿腿管,以及假腳。其中膝關節最為重要和復雜,故關于假肢膝關節的研究一直是重點和難點[4]。傳統的機械阻尼膝關節,只能簡單地滿足行走和站立支撐,阻尼大小不可調且不能隨步速變化,缺少人機環境之間的信息反饋,導致畸形步態,增加截肢患者行走時的能量消耗[5]。智能膝關節是指將微型計算機技術、智能控制技術應用到膝關節力矩的控制上,使膝關節的力矩可以隨著步行速度、關節角度變化而自動調整,從而使步態接近健康人[6]。按照能否提供主動力矩,智能膝關節可分為動力型和被動型[7]。動力型智能膝關節屈伸運動是由電機等外力驅動的;被動型智能膝關節屈伸運動是由大腿殘端帶動的,智能控制系統只是調整膝關節阻尼力矩的大小[8]。
智能膝關節研究的重點在于如何設計機械結構,確定控制策略,制定訓練方法,從而適應不同的行走環境,實現良好的生理步態[9]。國內外學者對智能膝關節均有一定程度的研究。Lambrecht 等[10]設計了一種半驅動式智能膝關節,通過液壓泵和電機實現驅動和非驅動模式,但是液壓閥回路特別復雜,結構笨重;Herr 等[11]研究了磁流變液用于智能膝關節阻尼力矩控制的方法,利用磁流變液運動黏度隨電流大小變化的性質,實現不同速度下膝關節阻尼的調整;Bonnet 等[12]對截肢患者穿戴多軸液壓智能膝關節在不同速度下的步態進行了研究,膝關節最大彎曲角度在不同速度下差異較小;Orhanli 等[13]研究了氣壓智能膝關節的有限狀態機控制,通過生理步態與假肢步態的比較評估假肢的性能;本團隊[14]研究了基于小腦神經網絡模型的智能膝關節控制策略,通過健康腿信號的測量實現步態的跟隨與控制;李偉[15]設計了一種基于單電機控制閥門開度、調節液壓阻尼的智能膝關節,但是其彎曲阻尼與伸展阻尼的調節并不獨立;楊敏等[16]設計并制作了擺動式缸體的四連桿膝關節,通過四桿機構和阻尼可控的擺動汽缸,實現運動軌跡對速度的自適應。
當前智能膝關節研究多是性能對比研究,即截肢者分別穿戴已有智能膝關節與傳統機械膝關節進行特定參數對比,而關于新型膝關節結構設計及訓練方法的研究則相對較少。本研究旨在通過分析正常人生理步態,確定膝關節阻尼調整的控制目標,針對步態周期內相位轉換的特點,提出智能膝關節站立相和擺動相的訓練方法,利用液壓阻尼特點與人體行走時膝關節阻尼力矩的相似性,設計一款新型的單軸液壓膝關節結構,并根據假腿的人機交互要求,提出膝關節功能模擬與測評裝置,替代人體穿戴膝關節的主觀感受,提高膝關節性能評估的客觀性。通過模擬測試實驗,研究膝關節實現生理步態所需阻尼調整的規律。
1 材料與方法
1.1 正常人生理步態研究
結合相關研究可知,一個步態周期可分為 5 個不同的相位:站立相彎曲、站立相伸展、預擺動、擺動相彎曲、擺動相伸展[17-19]。腳跟著地為一個周期開始,膝關節預屈曲,以減少地面反作用力所造成的沖擊,穩定站立相身體重心的高度。站立相膝關節彎曲到最大角度后,進行站立相伸展,直到伸展完成。站立相末期,支撐腿再次彎曲為擺動相離地做準備,稱為預擺動,此時對側腳著地,處于雙腳支撐狀態。當髖關節處于彎曲狀態,膝關節彎曲到一定角度,腳尖離地,膝關節繼續彎曲,進入擺動相,當膝關節擺動相彎曲到最大角度,膝關節開始伸展,當膝關節完全伸展,腳跟再次著地,進入下一個周期。正常人的步態劃分如圖 1 所示。
圖1
正常人一個行走周期的步態劃分
Figure1.
Gait classification of a walking cycle of normal people
擺動相最大彎曲角度對假肢穿戴者的步態影響很大。若該角度過大,則容易造成下一步腳跟著地時小腿還未伸直,在這種條件下,假肢穿戴者被迫通過降速或者擺動伸展時用力甩動來防止跌倒,這會造成穿戴者的不適和能量消耗的增加。因為擺動相最大彎曲角度實際代表著腳尖的最大離地高度,若此角度過小,則膝關節擺動伸展時會增大腳尖觸地絆倒的風險。此外,若假肢側擺動相最大彎曲角度與健康腿側有較大的差異,則會造成動態行走時的不美觀。Inman 等[20]在研究中指出,正常行走過程中,最大擺動彎曲角度通常不超過 70°。但是其研究對象為歐洲人,是否同樣適用于亞洲人尚有待證明。因此,通過健康人生理步態的測試研究,確定合理的智能膝關節擺動相最大彎曲角度范圍是一項重要的內容。受試者個人數據信息如表 1 所示。所有測試參與者均在實驗開始之前被詳細告知了實驗內容,在知情同意的情況下參與該項研究。該實驗方法與準則得到了上海健康醫學院倫理委員會的審批通過。
圖2
下肢姿態和關節角度信息測量
Figure2.
Measurement of lower limb posture and joint angle
每名受試者均在跑步機上以慢速(0.8 m/s)、中速(1.2 m/s)、快速(1.8 m/s)三種行走速度持續行走,受試者運動信息參數通過 RealGait(江蘇德長全身三維步態與運動分析系統)獲得,其包含 17 個全身一體化傳感器,可實時捕捉和分析步態及全身所有關節主要運動。傳感器位置及實際測量如圖 2 所示。
每名測試者在三種不同速度下的擺動相最大彎曲角度如圖 3 所示。十名受試者在三種速度下的擺動相最大彎曲角度均介于 50~70° 之間。可見擺動相最大彎曲角度與個體差異、速度變化的相關性不大。由于假肢的安全性應放在首位,為降低腳尖觸地絆倒的風險,假肢膝關節的擺動相最大彎曲角度應較健康人有所提高,故確定控制目標為不同速度下膝關節擺動相最大彎曲角度介于 60~70°。
圖3
不同速度下受試者擺動相最大屈曲角度
Figure3.
Maximum swing flexion angle under different speeds
1.2 智能膝關節設計
1.2.1 機械結構
液壓及氣壓智能膝關節均是通過微處理器控制電機,調節阻尼器內部閥門開度大小,以實現阻尼的調整;磁流變智能膝關節則是通過改變電流大小,進而改變磁場強度,使磁流變液黏度發生變化,從而調節阻尼,但是在強電場、磁場附近則不適用,限制了穿戴者的應用范圍。液壓阻尼器在體積較小時,仍可以提供很強的阻尼,可有效保證支撐相的穩定性,多用于單軸膝關節。液壓阻尼隨著流速的變化呈現出不同的性質,層流時阻尼與速度呈線性,湍流時則阻尼的增大呈非線性。因此,不同速度下擺動相膝關節阻尼力的調整,可通過改變液壓油通流面積制造湍流,實現阻尼力矩的快速適應與控制,對膝關節擺動相生理步態的獲得十分有益,因此設計了單軸液壓膝關節結構,如圖 4 所示。
為實現膝關節屈曲與伸展阻尼的獨立調節,采用雙電機帶動流量調節閥門,分別改變屈曲和伸展流道流速。為確保屈曲油道阻尼與伸展油道阻尼互不影響,分別在兩個油道中放置單向截止閥,當膝關節屈曲,活塞向下運動時,伸展油道中的單向閥門截止,屈曲油道中的單向閥門打開,液壓油只能通過屈曲調節油道從下腔進入上腔;當膝關節伸展,活塞向上運動時,屈曲油道中的單向閥門截止,伸展油道中的單向閥門打開,液壓油只能通過伸展調節油道從上腔進入下腔。為實現膝關節伸展時的助力,液壓缸底部彈簧殼中置有助伸彈簧。
圖4
液壓智能膝關節
Figure4.
Microprocessor-controlled prosthetic knee with hydrau lic damper
在每一個相位狀態內,控制液壓阻尼器閥門的開度調節液壓油的流速,從而控制膝關節的阻尼力矩,阻尼力矩的大小正比于膝關節角速度的平方,
|
其中 M 是膝關節阻尼力矩,V 是膝關節角速度,通過對膝關節角度信號求導獲得,C 是膝關節動態阻尼常數。在一個給定的步行周期內,控制五個閥門開度,即五個不同的阻尼常數值,實現五個相位的適應與調整。只在步態相位轉換或者周期改變時,對阻尼值進行調整,在一個確定的步態相位內,阻尼常數不作調整。智能膝關節自適應控制系統的目的是確定適應于相位狀態的阻尼常數,也即是狀態轉換時控制合適的閥門開度,從而達到生理步態。
1.2.2 傳感器系統
用于下肢智能假肢步態相位識別的傳感器主要包括:膝關節角度傳感器、加速度計、壓力傳感器、踝關節多維力傳感器。多維力傳感器成本較高,在腳底安裝壓力傳感器,通過開關信號識別腳跟著地和腳尖離地是步態相位識別的常見方法,但是該方法不利于鞋子的更換,且不適用于外界復雜的腳底環境,難以應用于產品。為實現低成本且不受鞋子更換影響的步態相位識別,設計了專用的小腿腿管,如圖 5 所示。整個傳感器系統包括膝關節角度傳感器以及腿管前后兩個薄片式壓力傳感器。當腳跟著地相位 1 觸發時,壓力信號為(1,0);當站立屈曲至最大角度,腳掌完全著地相位 2 觸發時,壓力信號為(1,1);當腳跟離地相位 3 觸發時,壓力信號為(0,1);當腳尖離地相位 4 觸發時,膝關節角速度為正且壓力信號為(0,0);當擺動屈曲至最大角度相位 5 觸發時,膝關節角速度為負且壓力信號為(0,0)。
圖5
小腿腿管壓力傳感器結構
Figure5.
Pressure sensors in shank tube
1.3 相位控制訓練方法
1.3.1 站立相控制訓練方法
站立相包括狀態 1、2、3。在狀態 1,即站立彎曲時,假肢膝關節需要提供較高的阻尼力,以防體重導致的彎曲跌倒;在狀態 2,即站立伸展時,假肢膝關節也需要提供較高的阻尼力,進行伸展減速,以防過伸,導致膝關節旋轉塊與接受腔發生碰撞。站立相阻尼力的大小取決于膝關節所受的最大軸向力,最大軸向力越大,膝關節站立相彎曲和伸展阻尼力的值也應越大,即液壓閥門開度越小。
當截肢患者第一次穿戴上膝關節假肢行走時,狀態 1 的阻尼力設為很大,即液壓彎曲閥門開度很小,不會發生因彎曲阻尼過小導致的跌倒,確保行走的安全。狀態 2 的阻尼設為很小,此處使伸展閥門完全打開,即確保截肢患者能夠順利伸展。當穿戴者行走了一段距離后(可設為 20 步),狀態 1 和 2 的阻尼值設為正比于站立相的平均最大軸向力。使用此種控制方法,無需對膝關節輸入穿戴者任何的特定信息,使用膝關節上的傳感器獲得的傳感信息即可實現站立相彎曲和伸展阻尼的自適應控制。對于狀態 3,膝關節彎曲阻尼設為最小,即彎曲閥門完全打開,使穿戴者擺動最為省力。
1.3.2 擺動相控制訓練方法
穿戴者的行走速度,與假肢腳掌接地時間有關。站立相時,膝關節傳感器測量一個隨運動速度變化的參數,此處使用假肢腳掌接地時間。當穿戴者行走速度加快時,腳掌接地時間會下降。膝關節處理器中存儲有生理步態所有運動速度對應的腳掌接地時間,0~2 s 的時間范圍涵蓋了所有速度下對應的腳掌接地時間,將 2 s 以 40 ms 作為間隔分成 50 份,當穿戴者的速度變化時,對應接地時間所處的時間段也發生變化。狀態 4 的控制目標是擺動相的最大彎曲角度,當穿戴者行走第一步時,將擺動相彎曲阻尼設為最小,即彎曲閥門完全打開,此時擺動的角度與所設定的目標最大彎曲角度有差異,在隨后的步行中,根據差值逐漸增大阻尼,即彎曲閥門開度逐漸減小,直到達到目標設定的最大彎曲角度,此時彎曲閥門的開度即為此速度下實現生理步態的開度,存入處理器。不同速度下 4 狀態彎曲閥門開度均由此方法獲得,訓練過程完成后,即可根據行走速度直接調用訓練產生的存儲數據值。當膝關節由狀態 4 到 5,即膝關節從最大彎曲角度到完全伸展過程中,第一步伸展阻尼設置為最小,即伸展閥門完全打開,確保膝關節能夠完全伸展,在隨后的步行中,伸展阻尼逐漸增大,即伸展閥門開度逐漸減小,狀態 5 伸展阻尼的大小與狀態 4 彎曲阻尼的大小相關,彎曲阻尼越大,伸展阻尼也越大,伸展阻尼與彎曲阻尼的函數關系通過實驗獲得。當穿戴者以不同速度進行行走訓練時,記錄不同速度下狀態 5 閥門的訓練開度。
2 智能膝關節模擬測試
假肢功能模擬與測試過程中,人體試驗安全性及可重復性比較低,通過機器測試系統可以完成一些人體不方便參與或者有一定危險的評估測試。為了對下肢假肢進行功能評價,根據假腿人機系統的主要功能要求,以同步步行帶模擬假肢的平地行走,以升降氣壓缸模擬人體行走的重心上下變化,實現智能假腿行走時功能的模擬,模擬與測評系統構成如圖 6 所示。
圖6
下肢假肢功能模擬與測評系統
Figure6.
Function simulation and evaluation system of lower limb prosthesis
將所設計膝關節通過特定接頭安裝在假肢側髖關節下部,為了對比智能膝關節自動調整阻尼后與未調整時對膝關節擺動相最大屈曲角度的影響,前 7 步為不施加阻尼控制狀態,彎曲閥門完全打開,后 10 步則為阻尼自動調整之后狀態,通過膝關節角度傳感器記錄每一步的擺動相最大屈曲角度,當同步帶速度分別固定為 0.8、1.2、1.8 m/s 時,膝關節彎曲阻尼調整的適應性及最大擺動彎曲角度如圖 7 所示。
圖7
不同速度下彎曲阻尼調整及最大擺動彎曲角度
Figure7.
Maximum swing-phase knee flexion angle and flexion damping adjustment with different speed
當液壓阻尼器彎曲閥門閉合度為 0%,即前 7 步時,膝關節在 0.8、1.2、1.8 m/s 速度下擺動相最大彎曲角度分別為(86 ± 2)°、(91 ± 3)°、(97 ± 3)°,即彎曲阻尼閥門完全打開時,不同速度下擺動相最大彎曲角度隨著速度的增加而增大。在三種速度下,當阻尼器閥門閉合度發生變化時,最大擺動彎曲角度均可調整到 60~70° 之間,即不同速度下均可實現生理步態。在 0.8、1.2、1.8 m/s 速度下,膝關節最大擺動彎曲角度調整到 60~70° 之間所需的閥門閉合度百分比分別為 25%、40%、70%,即不同速度下調整到生理步態所需的閥門閉合度百分比也發生變化,速度越大,閉合度百分比越大,即閥門開度越小。
3 討論與結論
在正常行走過程中,膝關節大部分時間充當阻尼器,但是在上坡、上樓梯等需要主動力矩的情況下也需要主動發力做功。液壓被動阻尼式假肢在無需主動力矩情況下雖然具有較好的阻尼性能,但是仍然不能提供主動力矩,設計動力源與阻尼器結合的主被動混合結構是重要的研究方向。在后續研究中,計劃將電機驅動或者微型泵與當前阻尼器結構結合,以進一步提高仿生性。
膝關節的相位控制訓練方法雖然適用于不同穿戴者,但是前期患者參數評定的正確性會對膝關節的性能造成影響,膝關節的智能控制無法補償因前期對線調整的偏差,因此正確的對線及患者參數測量十分重要。
下肢假肢功能模擬與測試裝置雖然能夠提高假肢性能評價的客觀性,但是該研究中的路況較為單一,僅是以同步帶模擬了平地行走,其在上下坡、上下樓梯、跨越障礙等復雜路況下的工作性能還有待研究。
生理步態的指標不止一種,步態對稱性、擺動相最大彎曲角度以及行走時的能量消耗均是重要指標。本研究以膝關節擺動相最大彎曲角度作為控制對象,達到了良好效果,但是其應用于步態對稱性等其他指標時的效果尚有待進一步研究,因此所涉及測試平臺包含有健康腿模擬模塊,在后續研究中將會探討其行走時的左右對稱性等指標。
智能膝關節設計的最終目的是減少穿戴者的能量消耗,實現生理步態。本研究通過生理步態一個周期內狀態相位的劃分及轉換條件的確定,提出了站立相和擺動相的相位訓練方法。在測量健康人行走時擺動相最大彎曲角度范圍的基礎上,確定了不同速度下擺動相最大彎曲角度的范圍,并以此作為控制目標,在功能模擬與測評裝置上對所設計膝關節進行了測試。測試結果表明:彎曲阻尼閥門完全打開時,不同速度下擺動相最大彎曲角度隨著速度的增加而增大;不同速度下均可實現生理步態,但是不同速度下調整到生理步態所需閥門閉合度百分比有所差異,速度越大,閉合度百分比越大,即閥門開度越小。