針對帕金森病(PD)肌強直癥狀嚴重程度的診斷主要依賴于醫生主觀判斷的現狀,本研究設計了一種基于機電驅動裝置和機械阻抗測量的 PD 肌強直癥狀量化檢測系統,該系統采用機電驅動裝置對 PD 患者重復執行肘關節彎曲伸展動作,并同步采集其運動狀態和生物力學信息,以最小平方參數估計方法獲得多個肌強直量化特征參數,同時與神經內科醫生參照 PD 評分量表(UPDRS)給出的肌強直癥狀評分進行相關性分析,尋找優選的量化參數。臨床試驗結果顯示,患者肘關節被動運動時的機械阻抗值與 UPDRS 肌強直癥狀評分具有高度相關性,皮爾遜(Pearson)相關系數為 r = 0.872,P < 0.001,該結果表明,本系統能夠靈活有效地量化評估 PD 肌強直癥狀。此外,機械阻抗可以作為一種優選的 PD 肌強直量化參數,用以輔助神經科醫生進行癥狀診斷和病情監測。
引用本文: 戴厚德, 熊永生, 蔡國恩, 夏許可, 林志榕. 基于機械阻抗測量的帕金森肌強直癥狀量化檢測系統. 生物醫學工程學雜志, 2018, 35(3): 421-428. doi: 10.7507/1001-5515.201708069 復制
版權信息: ?四川大學華西醫院華西期刊社《生物醫學工程學雜志》版權所有,未經授權不得轉載、改編
引言
帕金森病(Parkinson’s disease,PD)是一種常見于老年人的神經系統退行性疾病,我國 65 歲以上人群的 PD 患病率約為 1.7%[1]。隨著老齡化社會的到來,我國 PD 患者人數急劇增加[2]。PD 的臨床表現主要包括震顫(tremor)、運動遲緩(bradykinesia)、肌強直(rigidity)和姿勢步態障礙(postural instability)等運動癥狀。其中肌強直癥狀表現為檢查者帶動患者的肢體、頸部或軀干關節做被動運動時可覺察到明顯阻力,這種阻力的增加呈現各個方向均勻一致的特點,類似彎曲軟鉛管的感覺,故稱為“鉛管樣強直”(lead-pipe rigidity)[3]。精準的肌強直癥狀評估和有效的治療反饋能顯著提高 PD 患者的生活質量[4]。此外,PD 患者在深部腦刺激手術(deep brain stimulation,DBS)過程中靶點的選擇和術后參數的調整,也主要依賴于對肌強直癥狀的量化評估[5]。
PD 患者肌強直癥狀在臨床上主要根據統一的 PD 評分量表(unified Parkinson’s disease rating scale,UPDRS)進行評估[6],分為 5 個等級(0:無癥狀;1:輕微;2:輕度;3:中度;4:重度)。由于不同的醫生均依賴各自的經驗參照 UPDRS 量表進行評估,因此其評價結果往往具有主觀性和個體差異性,特別是年輕醫生缺乏一定的經驗積累,容易導致評價結果和實際病情偏差較大。雖然臨床醫生也借助表面肌電圖[7]、腦部磁共振成像[8]等檢查手段用于 PD 患者肌強直癥狀的輔助診斷,但是其檢查過程復雜且費用較高,并不具有普適性。目前,醫學界尚無量化檢測 PD 肌強直癥狀的設備投入臨床應用。
隨著微機電系統(micro-electro-mechanical systems,MEMS)運動傳感技術的發展,國內外研究者廣泛地開展了基于 MEMS 運動傳感器和可穿戴式系統的 PD 運動癥狀自動化、客觀化的量化評估研究[9-18],但大多集中在震顫和運動遲緩癥狀的量化檢測。其中美國大湖公司開發的 KinesiaTM檢測系統較為典型,其檢測系統對震顫和運動遲緩癥狀的量化評分與 UPDRS 評分之間表現出高度相關性,皮爾遜(Pearson)相關系數分別為 r = 0.95 和 r = 0.67[10-11]。在震顫和運動遲緩量化評估算法方面,Cole 等[12]采用機器學習方法對 PD 震顫嚴重程度的量化檢測分類(癥狀等級:0~4)準確率已經大于 95%,Martinez-Manzanera 等[13]采用支持向量機對 PD 運動遲緩癥狀的嚴重程度進行分類(癥狀等級:0~4),精度可以達到 90.7%。
震顫和運動遲緩癥狀的量化評估通常僅需要借助運動傳感器,而肌強直癥狀的量化評估需要借助外力帶動患者的運動關節做往返運動并對患者手臂的阻力和運動信息進行準確測量,并提取特定關節變化的生物力學特性參數進行量化分析。所以需要設計較為復雜和精密的測力裝置來開發肌強直癥狀量化評估系統,導致目前針對 PD 肌強直癥狀的量化評估研究較少[14]。有學者運用運動學[15]、生物信號[16-17]、生物力學[18]等方法對 PD 肌強直癥狀進行量化研究,但在臨床試驗中還無法取得較好的效果。Sepehri 等[15]通過對 PD 患者手臂運動阻力的測量發現手臂運動滯回曲線的斜率和面積與 UPDRS 肌強直癥狀評分具有較高的相關性,Pearson 相關系數分別為 0.740 和 0.749。Endo 等[16]和 Xia 等[17]通過對 PD 患者手臂運動時肌電圖信號的分解對病情量化評估,但過程復雜且肌電信號信噪比低,效果不理想,斯皮爾曼(Spearman)和 Pearson 相關系數分別為 0.37~0.72 和 0.251~0.792。
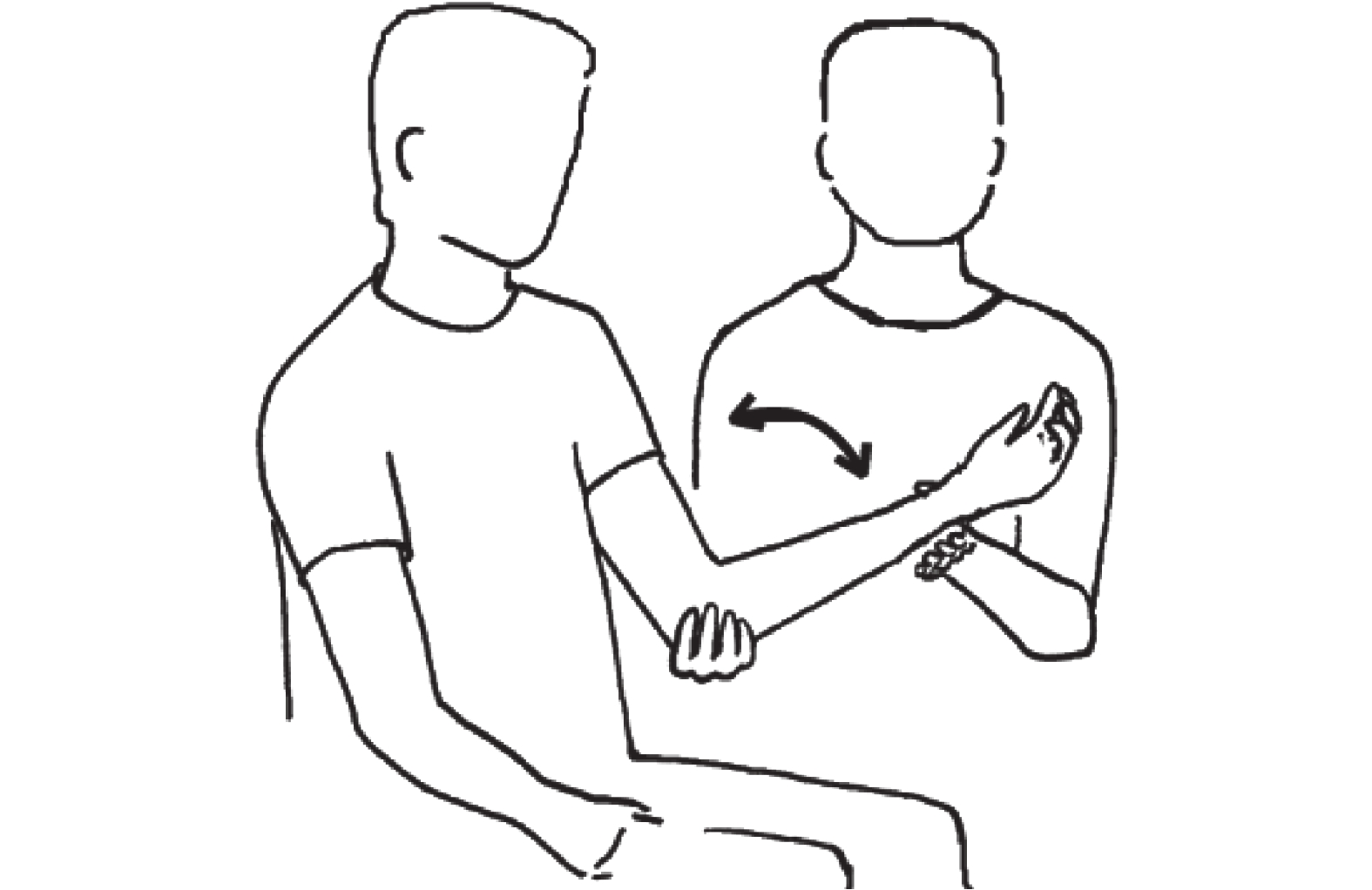
臨床上對 PD 患者肌強直癥狀的評估主要是根據經驗,通過對患者四肢肢體動作僵硬程度進行等級評估,而肘關節是人體結構最穩定和完整的關節之一,其最大屈伸度約 160°,旋前旋后均可接近 80°[19],因此通常選取手肘關節進行肌強直癥狀等級的評估,如圖 1 所示。由于肌強直癥狀外部特征很難被觀察,需要醫生一只手固定在患者的肘關節底部,另外一只手握在患者手腕部帶動患者肘關節重復做被動屈伸運動,屈伸運動結束后,醫生將基于主觀經驗感受到的患者肌強直癥狀評估值記錄下來。以此為基礎,本文通過自主設計的 PD 肌強直癥狀量化檢測系統采集患者肘關節被動彎曲伸展的運動信息,并采用基于機械阻抗的量化數學模型,分析患者肘部運動學和生物力學特性,分析比較測量參數和醫生 UPDRS 肌強直癥狀評分之間的關系。通過比較不同參數與 UPDRS 評分之間的相關性,可得到一個優選的量化參數,該參數可作為 PD 肌強直癥狀的量化指標來幫助醫生客觀準確地評估患者病情。
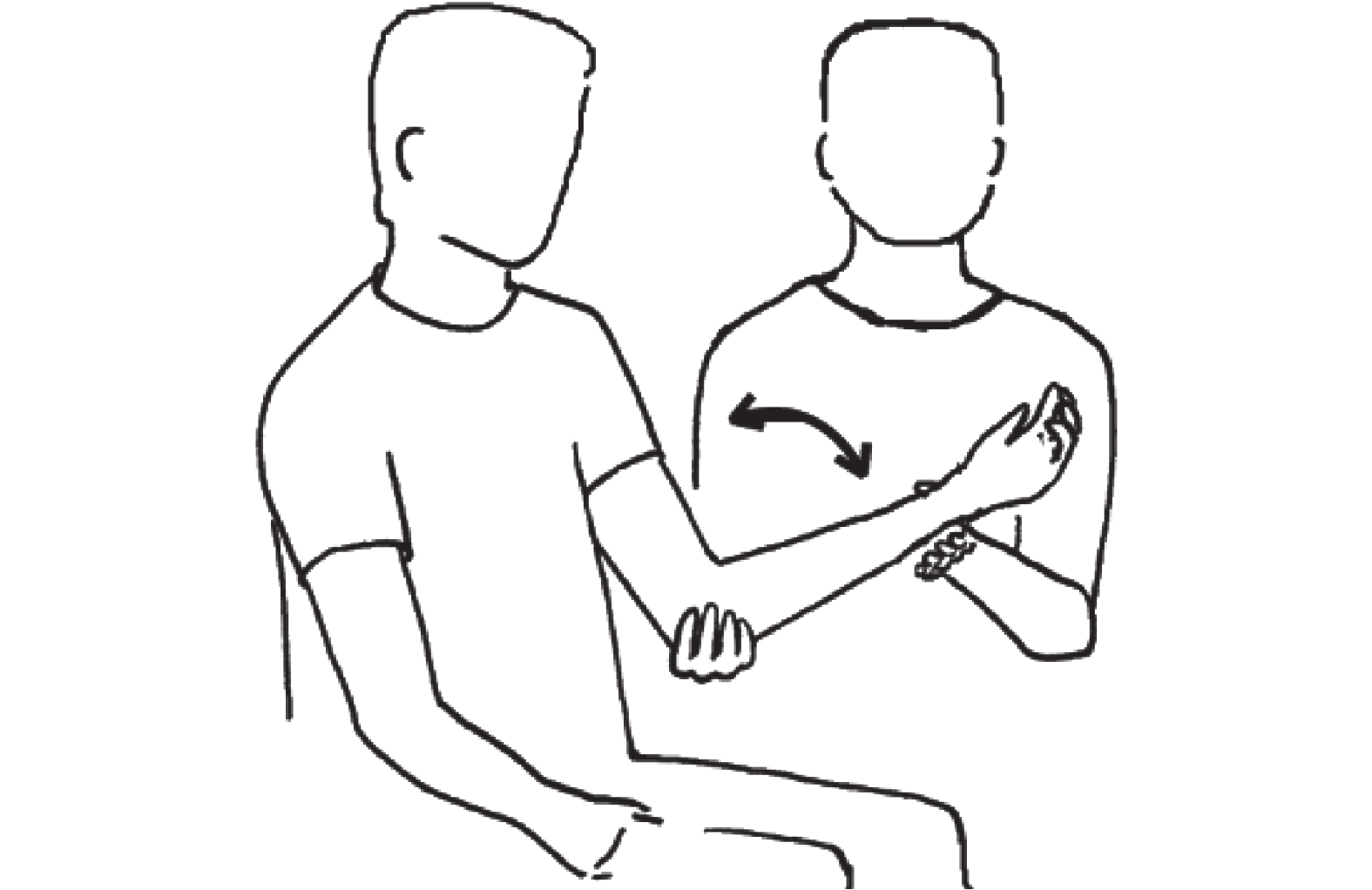 圖1
PD 肌強直癥狀評估(肘關節)
Figure1.
Clinical assessment of Parkinsonian rigidity (elbow joint)
圖1
PD 肌強直癥狀評估(肘關節)
Figure1.
Clinical assessment of Parkinsonian rigidity (elbow joint)
1 方法
1.1 PD 肌強直癥狀量化檢測系統設計
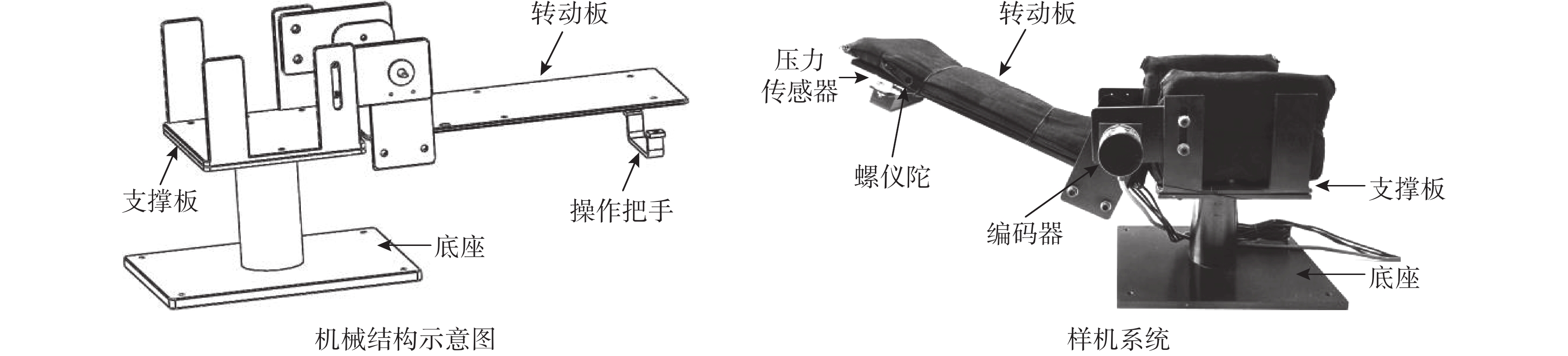
本研究設計的 PD 肌強直癥狀量化檢測系統包括機電驅動裝置、傳感器數據采集模塊和上位機用戶界面。如圖 2 所示,機電驅動裝置由底座、支撐板和轉動板組成,檢測時患者手臂肘部平放在支撐板上面,前臂用彈性綁帶固定在轉動板上以精確測量肘關節的被動運動幅度。評估者通過轉動板牽引受試者手臂做往返運動,測量手臂被動運動時的阻力、角度和角速度等。
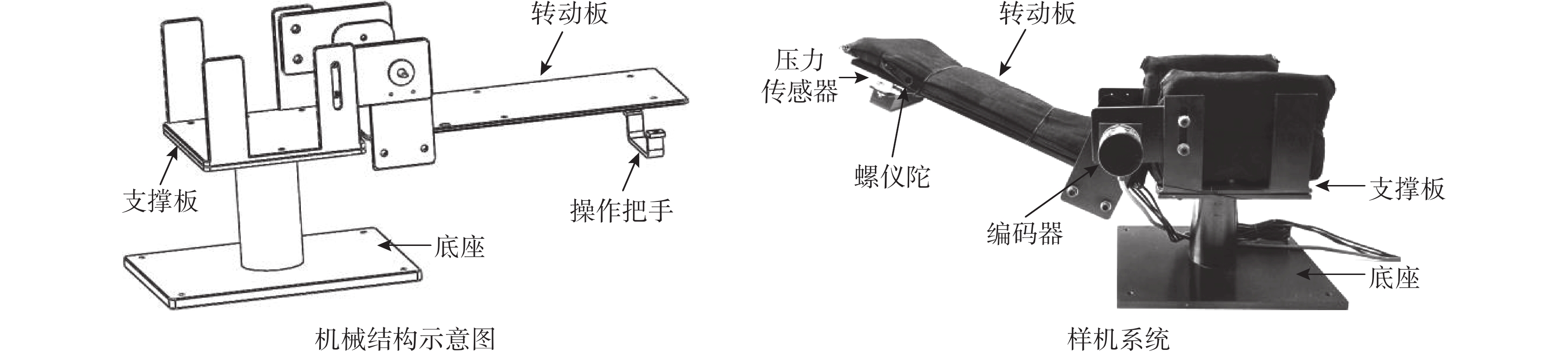 圖2
機電驅動裝置
Figure2.
Electromechanical driving device
圖2
機電驅動裝置
Figure2.
Electromechanical driving device
傳感器數據采集模塊包括兩個線性壓力傳感器(ZNLBM-10KG,中諾傳感器有限公司,中國)、一個 MEMS 慣性傳感器(MPU6050,InvenSense Inc.,美國)和一個編碼器(E6B2-CWZ6C-2000P/R,OMRON Corporation,日本)。兩個壓力傳感器固定在轉動板背面接近末端處,并與按壓的把手相連接,用于測量受試者肘關節被動運動時的阻力。慣性傳感器固定在兩個壓力傳感器中間位置,用于獲取受試者肘關節被動運動時的角速度。安裝在轉動板與支撐板連接的轉動軸處的編碼器分辨率為 2 000 脈沖/圈,用于實時測量手臂轉動的角度。
在傳感器數據采集模塊安裝之前,壓力傳感器和 MEMS 慣性傳感器分別進行了系統性的標定[20]。采用不同質量的標準砝碼放置于兩個線性壓力傳感器上,測量對應輸出結果,再通過線性擬合得到測量值與標準質量的轉換關系,進而通過轉換方程計算得出修正后的壓力值。對陀螺儀則進行 10 h 的水平靜止測試得到靜止偏移值,結合軸向誤差和非線性誤差進行參數修正以實現更準確的參數測量。
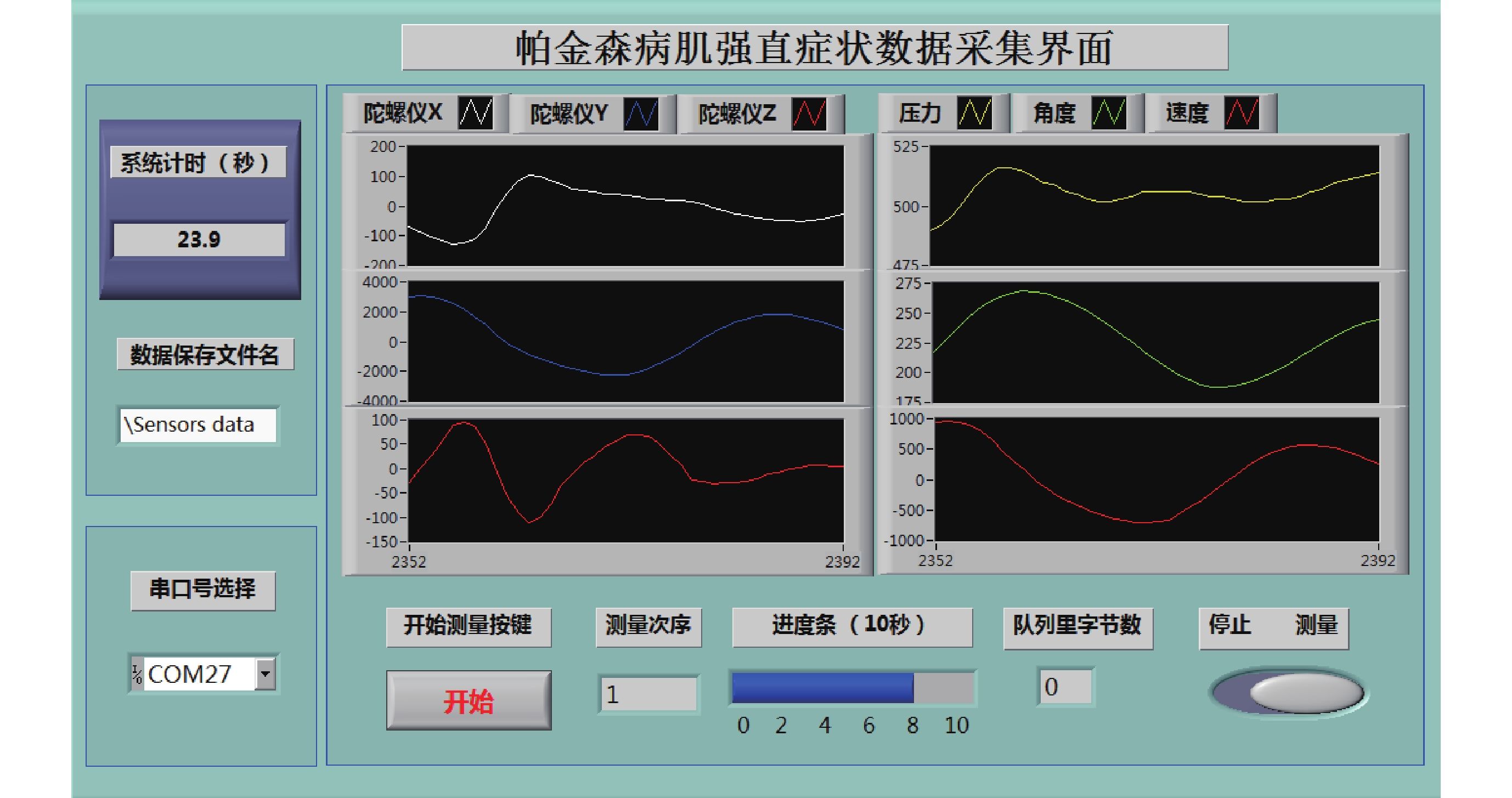
如圖 3 所示為基于虛擬儀器開發軟件 LabVIEW 2014(National Instruments Inc.,美國)的 PD 肌強直癥狀量化檢測系統上位機用戶界面。在此界面上可進行傳感器數據的實時采集、分析與顯示等操作。其中,傳感器數據采樣頻率為 100 Hz,并可通過 USB 接口進行傳感器數據采集模塊和上位機間的數據傳輸。
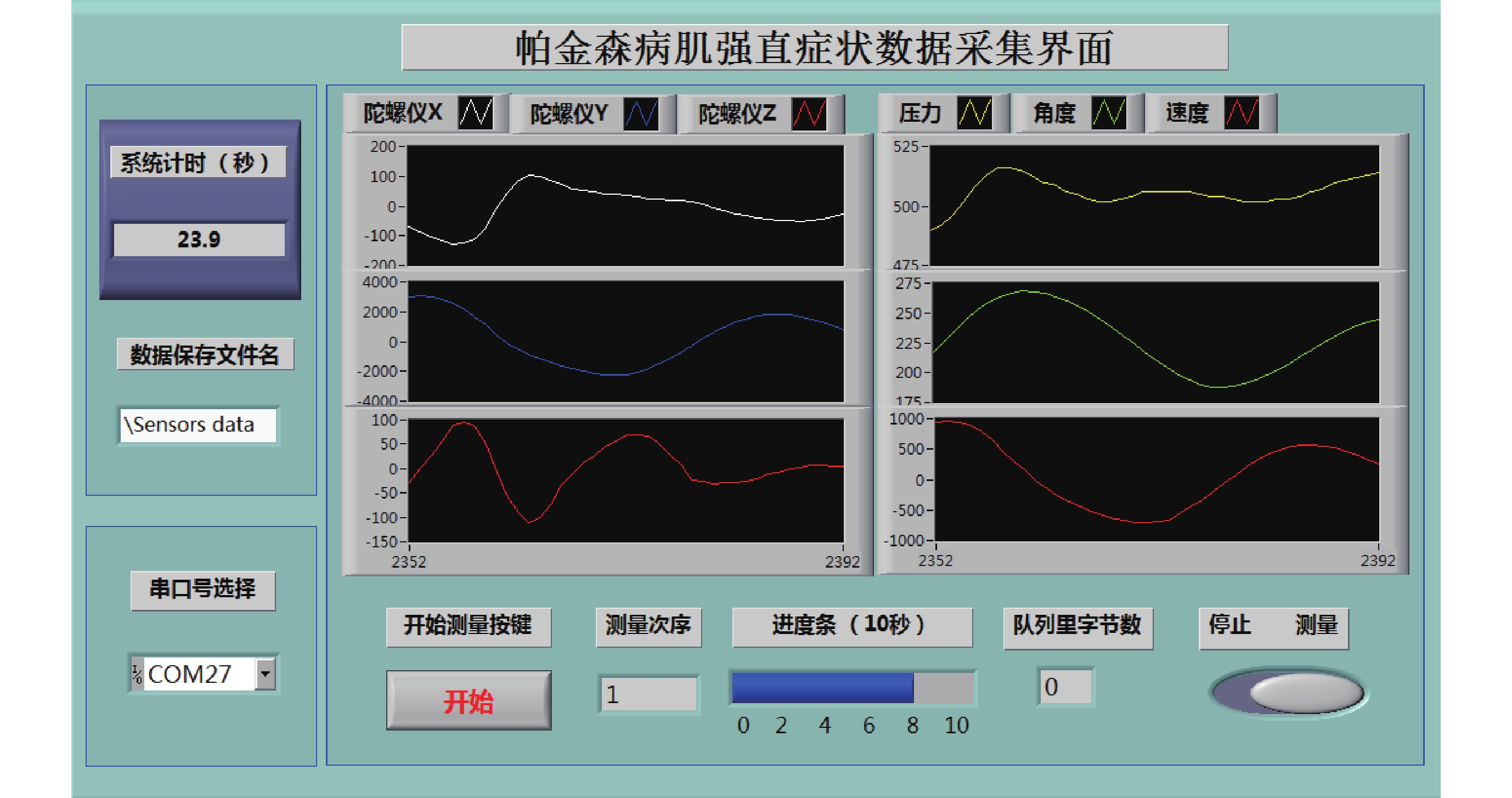 圖3
PD 肌強直癥狀量化檢測系統界面
Figure3.
Graphical user interface of the Parkinsonian rigidity quantification system
圖3
PD 肌強直癥狀量化檢測系統界面
Figure3.
Graphical user interface of the Parkinsonian rigidity quantification system
1.2 臨床試驗設計
共招募 20 名具有顯著性肌強直癥狀的 PD 患者作為臨床試驗病例組,年齡(68.3 ± 6.9)歲,其中女性 7 名,男性 13 名;10 名年齡相仿的健康人作為對照組,年齡(67.6 ± 4.2)歲,其中女性 3 名,男性 7 名;受試者均來自福建醫科大學附屬協和醫院神經內科。如表 1 所示,病例組 PD 患者均已由福建醫科大學附屬協和醫院神經內科醫生確診為不同嚴重程度的肌強直癥狀,并且能夠配合完成手臂被動彎曲和伸展動作。為了檢測到 PD 患者實際的肌強直癥狀嚴重程度,受試者試驗之前都停止用藥 12 h 以上,即處于藥效減退的狀態(關期)。對照組的 10 名健康人均沒有任何的神經障礙疾病、肢體活動障礙或對運動功能影響的服藥情況。
試驗前受試者均被告知試驗過程和注意事項,并簽署知情同意書。試驗時受試者靠近檢測裝置靜坐,保持放松以避免緊張引起的癥狀波動。如圖 4 所示,受試者手臂放置和固定在支撐板上,肘關節和機電驅動裝置轉動軸處對齊,試驗人員通過操作轉動板帶動受試者手臂做彎曲伸展動作,同時上位機進行數據采集、顯示與保存。試驗過程中受試者手臂保持放松狀態,不主動使用任何方向的作用力。根據神經內科醫生的建議,每次試驗記錄 10 s,根據病情等因素保持在 8~10 個關節往返動作,肘關節轉動幅度約為 120°。每名受試者左右手臂分別進行檢測;完成試驗之后,由一名經驗豐富的神經內科臨床醫生依據 UPDRS 量表對受試者肌強直癥狀程度進行評分。試驗采用雙盲模式,臨床醫生評分與試驗分別獨立進行,臨床醫生不參與試驗、不知曉試驗結果,試驗操作人員也不知道臨床醫生的評分情況。對照組試驗過程與病例組完全相同,試驗結束后也進行臨床醫生評分(對照組 UPDRS 肌強直癥狀評分結果均為 0)。
 圖4
試驗過程
Figure4.
Experiment with the Parkinsonian rigidity quantification system
圖4
試驗過程
Figure4.
Experiment with the Parkinsonian rigidity quantification system
1.3 量化方法和統計分析
在振動力學中,機械阻抗定義為系統激勵與響應的復數式之比,通常用來描述線性定常系統的頻域動態特性[21]。在生物力學中,人體肢體的動力學特性可以用機械阻抗的形式來描述,機械阻抗是一種從機械角度出發描述肢體特性的方法,它一般包括 3 個部分:彈性、粘性以及慣性[22]。PD 患者手臂在外力作用下的彎曲伸展運動類似于振動力學理論中的單自由度低頻振動系統[21-23],基于機械阻抗特性的系統運動微分方程如式(1)所示:
 |
其中,T、J、B、K 分別代表為系統的轉矩、轉動慣量系數、粘性參數和彈性參數。
 、
、
 和
和
 分別表示運動時的角加速度、角速度和角度。
分別表示運動時的角加速度、角速度和角度。
由于轉動慣量系數與角加速度乘積通常為常數,故偏移量為
 。轉矩 T 等于施加于患者手腕的壓力值 F 乘以施力處到轉動軸(肘關節)之間的距離 l。因此,如式(1)所示的系統運動方程可簡寫為如式(2)所示:
。轉矩 T 等于施加于患者手腕的壓力值 F 乘以施力處到轉動軸(肘關節)之間的距離 l。因此,如式(1)所示的系統運動方程可簡寫為如式(2)所示:
 |
其中,T 為轉矩(單位:N·m),
 為編碼器測得的角度[單位:(°)],
為編碼器測得的角度[單位:(°)],
 為慣性傳感器測得的角速度[單位:(°)/s],K 為彈性參數[單位:N·m/(°)],B 為粘性參數[單位:N·m·s/(°)],C 為偏移量(單位:N·m)。
為慣性傳感器測得的角速度[單位:(°)/s],K 為彈性參數[單位:N·m/(°)],B 為粘性參數[單位:N·m·s/(°)],C 為偏移量(單位:N·m)。
肢體的機械阻抗特性與肢體的運動息息相關。PD 患者上肢在外力作用下做被動往返運動時存在彈性、粘性特性,彈性部分機械阻抗即彈性系數 K,粘性部分機械阻抗則為粘性系數乘以手臂往返運動的角頻率,即
 。因此,系統機械阻抗 Z 為兩部分阻抗之和[23],如式(3)所示:
。因此,系統機械阻抗 Z 為兩部分阻抗之和[23],如式(3)所示:
 |
為了獲得機械阻抗 Z,本文采用最小平方參數估計方法求最優擬合參數 K、B、C[24]。令
 ,
,
 ,式(2)可改寫為如式(4)所示的矩陣形式:
,式(2)可改寫為如式(4)所示的矩陣形式:
 |
利用最小二乘算法求得最優的擬合參數
 ,如式(5)所示:
,如式(5)所示:
 |
通過式(3)和式(5),可獲得機械阻抗模型中的參數 B、K、C 和 Z。
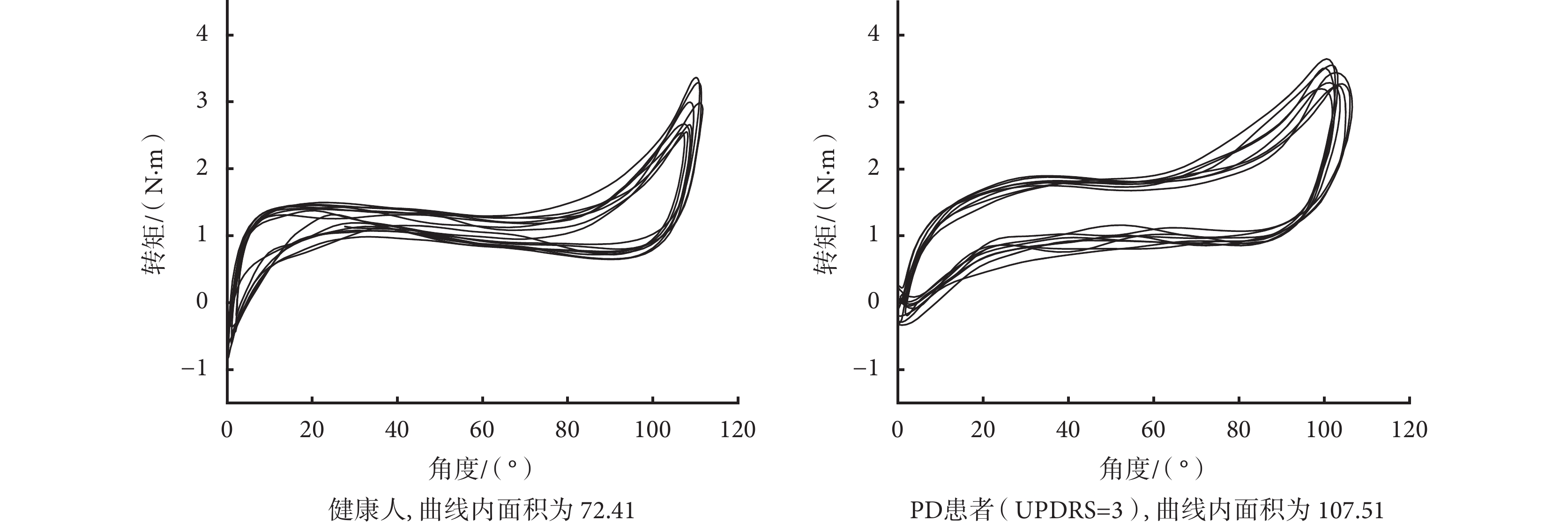
為了與機械阻抗模型所得的特征參數進行比較,本文還進一步提取文獻[25]中提出的機械功 W 和歸一化機械功 Wnorm 進行分析,通過對比分析不同特征參數與 UPDRS 肌強直癥狀評分之間的相關性來獲得優選的 PD 肌強直癥狀量化檢測參數。機械功 W 定義為受試者手臂做被動往返運動時的轉矩—角位移曲線內面積,如圖 5 所示。為了排除不同受試者手臂動作范圍不同的影響,文獻[25]對機械功進行歸一化處理,從而得到歸一化機械功 Wnorm。以上的數據分析計算均通過數值分析軟件 MATLAB R2014b(MathWorks Inc.,美國)完成。
為了驗證本文方法的有效性,對試驗數據進行了統計分析。病例組 PD 患者和對照組健康人的差異性比較采用獨立 t 檢驗分析,并采用單因素方差分析(analysis of variance,ANOVA)比較不同參數在 UPDRS 評分等級之間的差異是否具有統計學意義。最后,采用 Pearson 相關性分析計算上述 6 個特征參數(彈性參數 K、粘性參數 B、偏移量 C、機械阻抗 Z、機械功 W 和歸一化機械功 Wnorm)與 UPDRS 肌強直癥狀評分的相關性,比較每個參數的相關性大小進而得到優選的量化參數。文中所有的 P 值都為雙邊檢驗,P < 0.05 認為差異具有統計學意義。文中所有統計分析均通過統計分析軟件 IBM SPSS ver.22(IBM SPSS Inc.,美國)完成。
2 臨床試驗結果
如圖 5 所示,為了比較健康人與 PD 患者在執行被動彎曲伸展運動時肘關節呈現出的滯回現象,本文展示了具有代表性的 1 位對照組健康人和 1 位病例組 PD 患者肘關節被動彎曲伸展時的轉矩—角度圖,又稱“滯回曲線”。在力學中,滯回曲線定義為:在力循環往復作用下,結構的荷載—變形曲線,它反映的是在反復受力過程中結構的變形特征、剛度退化及能量消耗[26]。從生物力學角度來看,人體肘關節具有粘彈特性,受試者在外力作用下做被動彎曲伸展運動時,應力與應變呈非線性關系,且在應力周期變化時會產生滯后現象,趨向一個穩定的閉合環,如圖 5 所示,環形面積即為能量的損耗。從圖 5 可以看出,病例組 PD 患者肘關節運動的滯回曲線內面積明顯大于對照組的健康人,即能量損耗明顯大于健康人,說明患者手臂在外力作用下做被動運動時產生的阻力明顯大于健康人。
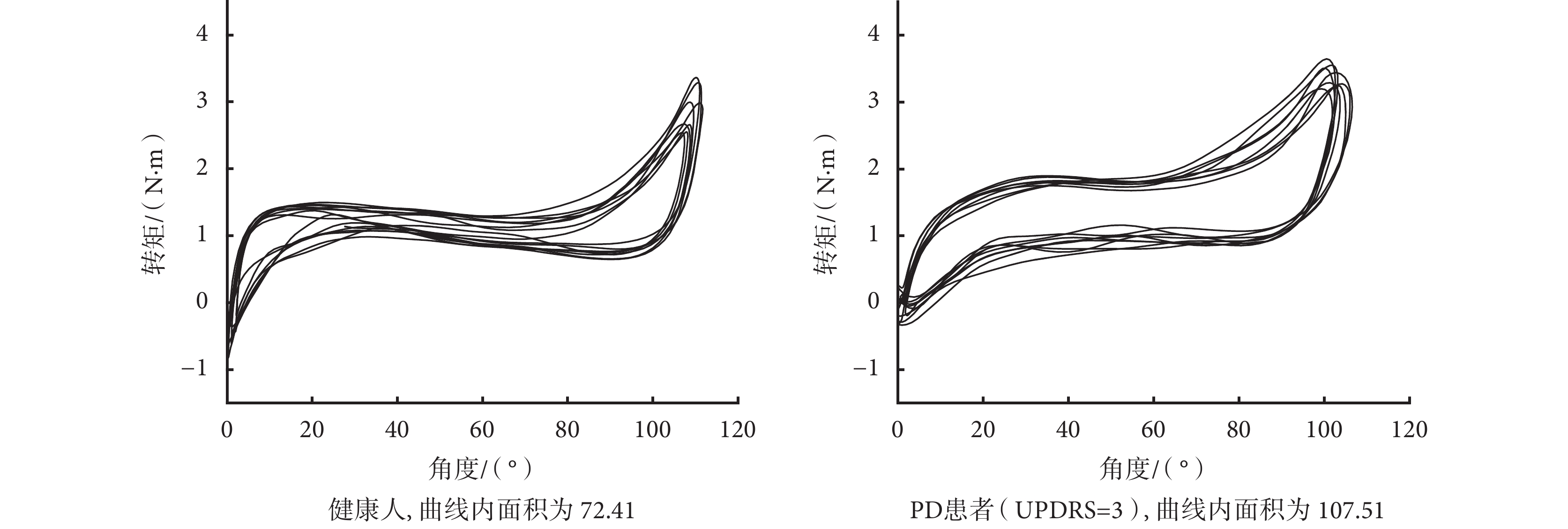 圖5
試驗者手臂被動往返運動的轉矩—角度關系圖
Figure5.
Torque-angle plots for the passive flexion-extension motion of limbs
圖5
試驗者手臂被動往返運動的轉矩—角度關系圖
Figure5.
Torque-angle plots for the passive flexion-extension motion of limbs
本研究中對照組健康人與病例組 PD 患者特征參數的獨立 t 檢驗結果如表 2 所示,彈性參數 K、粘性參數 B、偏移量 C、機械阻抗 Z、機械功 W 和歸一化機械功 Wnorm 參數表現出的差異均具有統計學意義,即 PD 患者組的各參數均值均大于對照組的均值(P < 0.05)。
采用單因素方差分析方法檢驗各個參數在不同 UPDRS 等級(UPDRS 評分等級 0~4)之間的差異,結果如表 3 所示,各參數均值在 5 個評分等級之間的差異均具有統計學意義(P < 0.05),其中機械阻抗 Z 的 F 值最大。
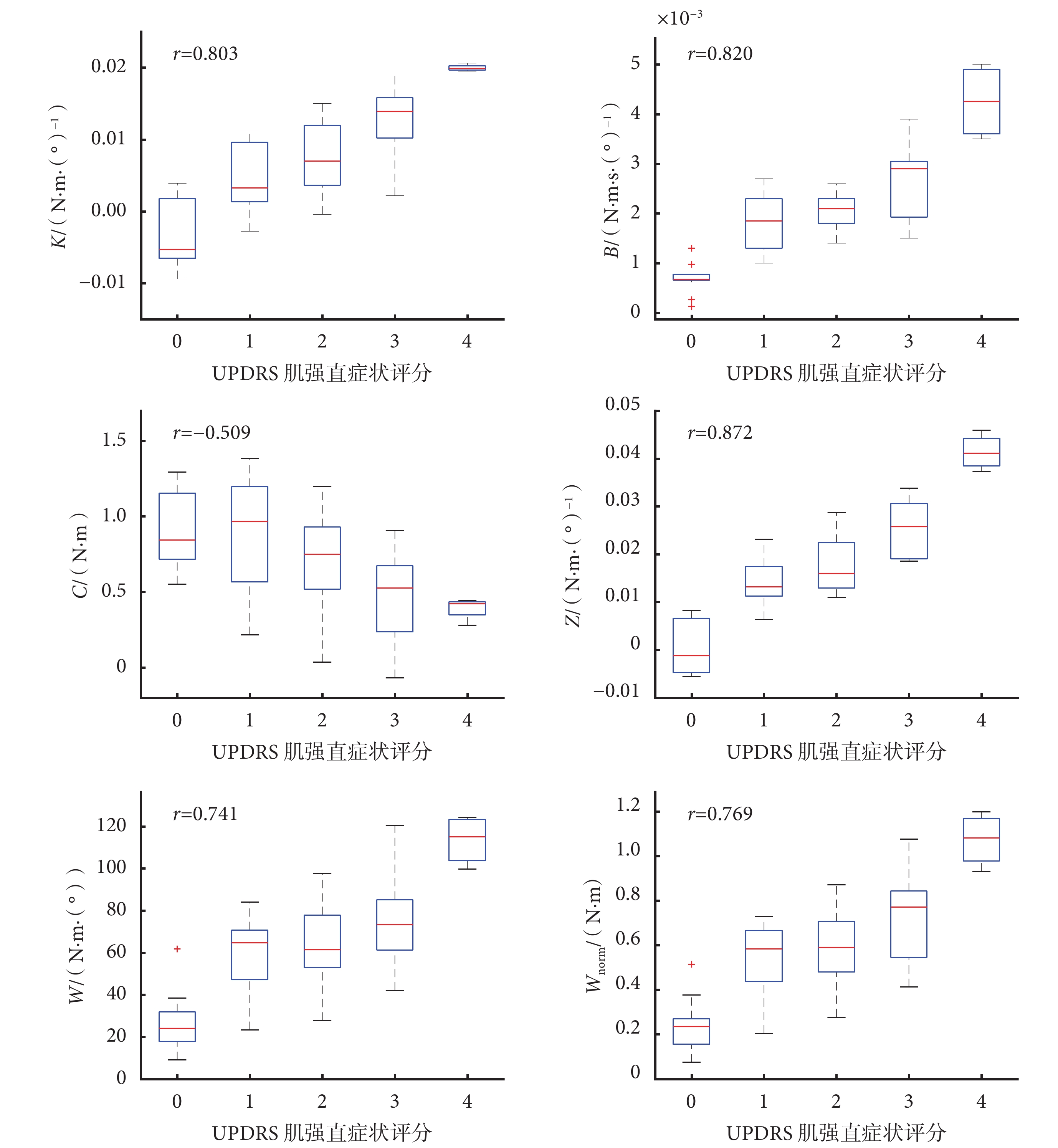
各參數與 UPDRS 肌強直癥狀評分的相關性分析結果如表 4 所示。可以看出,所測參數與受試者 UPDRS 肌強直癥狀評分之間的相關性均具有統計學意義(P < 0.05),其中相關系數最大的是機械阻抗 Z(r = 0.872)。如圖 6 所示為在不同 UPDRS 評分等級下各個特征參數繪制成的箱線圖,從圖 6 可以看出,各參數在不同 UPDRS 評分等級下存在不同程度的差異,而機械阻抗 Z 與 UPDRS 肌強直癥狀評分呈現正相關關系。
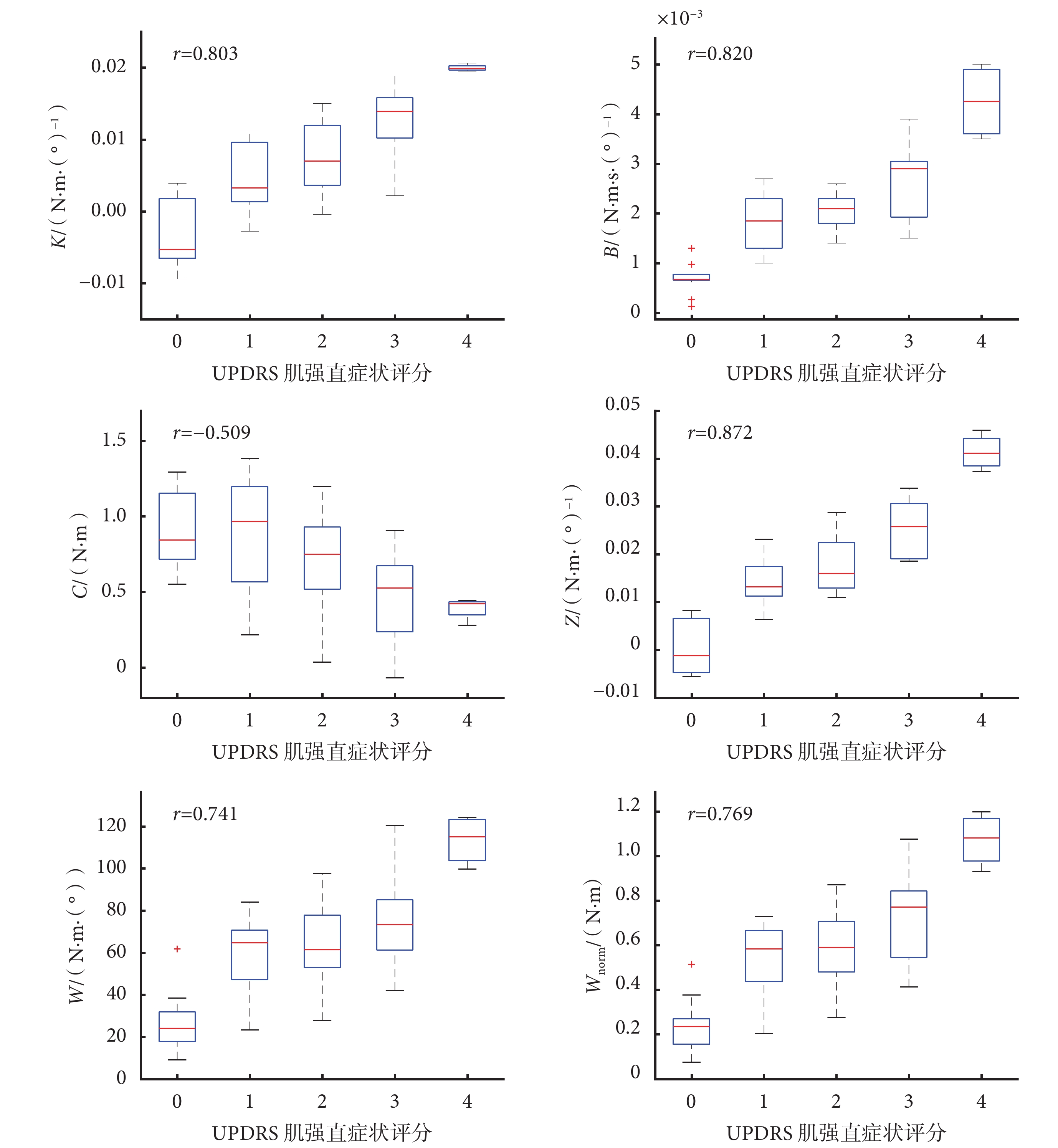 圖6
各參數與 UPDRS 肌強直癥狀評分的相關性分析
Figure6.
Box-plots of relations between each calculated parameter and the UPDRS rigidity scores
圖6
各參數與 UPDRS 肌強直癥狀評分的相關性分析
Figure6.
Box-plots of relations between each calculated parameter and the UPDRS rigidity scores
3 討論
由于 PD 患者肌強直癥狀的表現為特定關節生物力學參數的變化,無法像震顫和運動遲緩一樣可以直接由運動傳感器測量得出,因此臨床醫生對 PD 患者肌強直癥狀的評價結果往往具有主觀性和個體差異性。本文設計的 PD 肌強直癥狀量化檢測系統可方便靈活地采集受試者肘關節被動彎曲伸展的運動信息并進行量化分析。基于該系統進行的臨床試驗可提取受試者手臂肌強直癥狀的量化參數,通過對比分析不同參數與神經內科臨床醫生的 UPDRS 肌強直癥狀評分的相關性大小來尋求優選的量化參數。
本文試驗結果如圖 5 所示,該結果表明,PD 患者相比于健康人手臂被動彎曲伸展時滯回曲線面積(能量損耗)明顯增大,即受到的阻力明顯增大,提示 PD 患者的肘關節肌張力較健康人有所增加。表 2 的結果表明,PD 患者組和對照組健康人相比,肘關節做被動伸展彎曲動作時的彈性參數 K、粘性參數 B、機械阻抗 Z、機械功 W、歸一化機械功 Wnorm 在組間的差異均有統計學意義,PD 患者相比于健康人上述參數值有明顯的增加,可考慮作為客觀指標用于區分 PD 患者與健康人群。
表 3 結果顯示,本文所提取的特征參數在不同 UPDRS 等級間的差異具有統計學意義,驗證了本文 PD 肌強直癥狀量化檢測系統對患者病情程度評估的有效性,相關性分析結果也證實了這一結果。
表 4 和圖 6 的結果表明,該系統測得的機械阻抗 Z 與 UPDRS 肌強直癥狀評分相關系數最大(r = 0.872),隨著 PD 患者肌強直癥狀嚴重程度的增加(UPDRS 肌強直癥狀評分增加),機械阻抗 Z 值明顯增大,機械阻抗 Z 與 UPDRS 肌強直癥狀評分呈正相關關系,可客觀準確地反映患者的病情,因此機械阻抗可作為 PD 肌強直癥狀的優選量化評估參數,幫助醫生進行病情的診斷和監測。
綜上所述,本文設計的 PD 肌強直癥狀量化檢測系統相比 UPDRS 量表評估具有過程簡捷、顯示直觀、評價客觀等優點,可以作為對 PD 病情診斷和療效評估的輔助工具。后續將會對檢測系統的機械結構做進一步優化使其更加輕便、與手臂貼合更加緊密,并且通過更大規模的臨床試驗進行優化改進。
致謝:對本試驗提供幫助的醫務人員和所有參與試驗的試驗者表示感謝!
引言
帕金森病(Parkinson’s disease,PD)是一種常見于老年人的神經系統退行性疾病,我國 65 歲以上人群的 PD 患病率約為 1.7%[1]。隨著老齡化社會的到來,我國 PD 患者人數急劇增加[2]。PD 的臨床表現主要包括震顫(tremor)、運動遲緩(bradykinesia)、肌強直(rigidity)和姿勢步態障礙(postural instability)等運動癥狀。其中肌強直癥狀表現為檢查者帶動患者的肢體、頸部或軀干關節做被動運動時可覺察到明顯阻力,這種阻力的增加呈現各個方向均勻一致的特點,類似彎曲軟鉛管的感覺,故稱為“鉛管樣強直”(lead-pipe rigidity)[3]。精準的肌強直癥狀評估和有效的治療反饋能顯著提高 PD 患者的生活質量[4]。此外,PD 患者在深部腦刺激手術(deep brain stimulation,DBS)過程中靶點的選擇和術后參數的調整,也主要依賴于對肌強直癥狀的量化評估[5]。
PD 患者肌強直癥狀在臨床上主要根據統一的 PD 評分量表(unified Parkinson’s disease rating scale,UPDRS)進行評估[6],分為 5 個等級(0:無癥狀;1:輕微;2:輕度;3:中度;4:重度)。由于不同的醫生均依賴各自的經驗參照 UPDRS 量表進行評估,因此其評價結果往往具有主觀性和個體差異性,特別是年輕醫生缺乏一定的經驗積累,容易導致評價結果和實際病情偏差較大。雖然臨床醫生也借助表面肌電圖[7]、腦部磁共振成像[8]等檢查手段用于 PD 患者肌強直癥狀的輔助診斷,但是其檢查過程復雜且費用較高,并不具有普適性。目前,醫學界尚無量化檢測 PD 肌強直癥狀的設備投入臨床應用。
隨著微機電系統(micro-electro-mechanical systems,MEMS)運動傳感技術的發展,國內外研究者廣泛地開展了基于 MEMS 運動傳感器和可穿戴式系統的 PD 運動癥狀自動化、客觀化的量化評估研究[9-18],但大多集中在震顫和運動遲緩癥狀的量化檢測。其中美國大湖公司開發的 KinesiaTM檢測系統較為典型,其檢測系統對震顫和運動遲緩癥狀的量化評分與 UPDRS 評分之間表現出高度相關性,皮爾遜(Pearson)相關系數分別為 r = 0.95 和 r = 0.67[10-11]。在震顫和運動遲緩量化評估算法方面,Cole 等[12]采用機器學習方法對 PD 震顫嚴重程度的量化檢測分類(癥狀等級:0~4)準確率已經大于 95%,Martinez-Manzanera 等[13]采用支持向量機對 PD 運動遲緩癥狀的嚴重程度進行分類(癥狀等級:0~4),精度可以達到 90.7%。
震顫和運動遲緩癥狀的量化評估通常僅需要借助運動傳感器,而肌強直癥狀的量化評估需要借助外力帶動患者的運動關節做往返運動并對患者手臂的阻力和運動信息進行準確測量,并提取特定關節變化的生物力學特性參數進行量化分析。所以需要設計較為復雜和精密的測力裝置來開發肌強直癥狀量化評估系統,導致目前針對 PD 肌強直癥狀的量化評估研究較少[14]。有學者運用運動學[15]、生物信號[16-17]、生物力學[18]等方法對 PD 肌強直癥狀進行量化研究,但在臨床試驗中還無法取得較好的效果。Sepehri 等[15]通過對 PD 患者手臂運動阻力的測量發現手臂運動滯回曲線的斜率和面積與 UPDRS 肌強直癥狀評分具有較高的相關性,Pearson 相關系數分別為 0.740 和 0.749。Endo 等[16]和 Xia 等[17]通過對 PD 患者手臂運動時肌電圖信號的分解對病情量化評估,但過程復雜且肌電信號信噪比低,效果不理想,斯皮爾曼(Spearman)和 Pearson 相關系數分別為 0.37~0.72 和 0.251~0.792。
臨床上對 PD 患者肌強直癥狀的評估主要是根據經驗,通過對患者四肢肢體動作僵硬程度進行等級評估,而肘關節是人體結構最穩定和完整的關節之一,其最大屈伸度約 160°,旋前旋后均可接近 80°[19],因此通常選取手肘關節進行肌強直癥狀等級的評估,如圖 1 所示。由于肌強直癥狀外部特征很難被觀察,需要醫生一只手固定在患者的肘關節底部,另外一只手握在患者手腕部帶動患者肘關節重復做被動屈伸運動,屈伸運動結束后,醫生將基于主觀經驗感受到的患者肌強直癥狀評估值記錄下來。以此為基礎,本文通過自主設計的 PD 肌強直癥狀量化檢測系統采集患者肘關節被動彎曲伸展的運動信息,并采用基于機械阻抗的量化數學模型,分析患者肘部運動學和生物力學特性,分析比較測量參數和醫生 UPDRS 肌強直癥狀評分之間的關系。通過比較不同參數與 UPDRS 評分之間的相關性,可得到一個優選的量化參數,該參數可作為 PD 肌強直癥狀的量化指標來幫助醫生客觀準確地評估患者病情。
圖1
PD 肌強直癥狀評估(肘關節)
Figure1.
Clinical assessment of Parkinsonian rigidity (elbow joint)
1 方法
1.1 PD 肌強直癥狀量化檢測系統設計
本研究設計的 PD 肌強直癥狀量化檢測系統包括機電驅動裝置、傳感器數據采集模塊和上位機用戶界面。如圖 2 所示,機電驅動裝置由底座、支撐板和轉動板組成,檢測時患者手臂肘部平放在支撐板上面,前臂用彈性綁帶固定在轉動板上以精確測量肘關節的被動運動幅度。評估者通過轉動板牽引受試者手臂做往返運動,測量手臂被動運動時的阻力、角度和角速度等。
圖2
機電驅動裝置
Figure2.
Electromechanical driving device
傳感器數據采集模塊包括兩個線性壓力傳感器(ZNLBM-10KG,中諾傳感器有限公司,中國)、一個 MEMS 慣性傳感器(MPU6050,InvenSense Inc.,美國)和一個編碼器(E6B2-CWZ6C-2000P/R,OMRON Corporation,日本)。兩個壓力傳感器固定在轉動板背面接近末端處,并與按壓的把手相連接,用于測量受試者肘關節被動運動時的阻力。慣性傳感器固定在兩個壓力傳感器中間位置,用于獲取受試者肘關節被動運動時的角速度。安裝在轉動板與支撐板連接的轉動軸處的編碼器分辨率為 2 000 脈沖/圈,用于實時測量手臂轉動的角度。
在傳感器數據采集模塊安裝之前,壓力傳感器和 MEMS 慣性傳感器分別進行了系統性的標定[20]。采用不同質量的標準砝碼放置于兩個線性壓力傳感器上,測量對應輸出結果,再通過線性擬合得到測量值與標準質量的轉換關系,進而通過轉換方程計算得出修正后的壓力值。對陀螺儀則進行 10 h 的水平靜止測試得到靜止偏移值,結合軸向誤差和非線性誤差進行參數修正以實現更準確的參數測量。
如圖 3 所示為基于虛擬儀器開發軟件 LabVIEW 2014(National Instruments Inc.,美國)的 PD 肌強直癥狀量化檢測系統上位機用戶界面。在此界面上可進行傳感器數據的實時采集、分析與顯示等操作。其中,傳感器數據采樣頻率為 100 Hz,并可通過 USB 接口進行傳感器數據采集模塊和上位機間的數據傳輸。
圖3
PD 肌強直癥狀量化檢測系統界面
Figure3.
Graphical user interface of the Parkinsonian rigidity quantification system
1.2 臨床試驗設計
共招募 20 名具有顯著性肌強直癥狀的 PD 患者作為臨床試驗病例組,年齡(68.3 ± 6.9)歲,其中女性 7 名,男性 13 名;10 名年齡相仿的健康人作為對照組,年齡(67.6 ± 4.2)歲,其中女性 3 名,男性 7 名;受試者均來自福建醫科大學附屬協和醫院神經內科。如表 1 所示,病例組 PD 患者均已由福建醫科大學附屬協和醫院神經內科醫生確診為不同嚴重程度的肌強直癥狀,并且能夠配合完成手臂被動彎曲和伸展動作。為了檢測到 PD 患者實際的肌強直癥狀嚴重程度,受試者試驗之前都停止用藥 12 h 以上,即處于藥效減退的狀態(關期)。對照組的 10 名健康人均沒有任何的神經障礙疾病、肢體活動障礙或對運動功能影響的服藥情況。
試驗前受試者均被告知試驗過程和注意事項,并簽署知情同意書。試驗時受試者靠近檢測裝置靜坐,保持放松以避免緊張引起的癥狀波動。如圖 4 所示,受試者手臂放置和固定在支撐板上,肘關節和機電驅動裝置轉動軸處對齊,試驗人員通過操作轉動板帶動受試者手臂做彎曲伸展動作,同時上位機進行數據采集、顯示與保存。試驗過程中受試者手臂保持放松狀態,不主動使用任何方向的作用力。根據神經內科醫生的建議,每次試驗記錄 10 s,根據病情等因素保持在 8~10 個關節往返動作,肘關節轉動幅度約為 120°。每名受試者左右手臂分別進行檢測;完成試驗之后,由一名經驗豐富的神經內科臨床醫生依據 UPDRS 量表對受試者肌強直癥狀程度進行評分。試驗采用雙盲模式,臨床醫生評分與試驗分別獨立進行,臨床醫生不參與試驗、不知曉試驗結果,試驗操作人員也不知道臨床醫生的評分情況。對照組試驗過程與病例組完全相同,試驗結束后也進行臨床醫生評分(對照組 UPDRS 肌強直癥狀評分結果均為 0)。
圖4
試驗過程
Figure4.
Experiment with the Parkinsonian rigidity quantification system
1.3 量化方法和統計分析
在振動力學中,機械阻抗定義為系統激勵與響應的復數式之比,通常用來描述線性定常系統的頻域動態特性[21]。在生物力學中,人體肢體的動力學特性可以用機械阻抗的形式來描述,機械阻抗是一種從機械角度出發描述肢體特性的方法,它一般包括 3 個部分:彈性、粘性以及慣性[22]。PD 患者手臂在外力作用下的彎曲伸展運動類似于振動力學理論中的單自由度低頻振動系統[21-23],基于機械阻抗特性的系統運動微分方程如式(1)所示:
|
其中,T、J、B、K 分別代表為系統的轉矩、轉動慣量系數、粘性參數和彈性參數。
、
和
分別表示運動時的角加速度、角速度和角度。
由于轉動慣量系數與角加速度乘積通常為常數,故偏移量為
。轉矩 T 等于施加于患者手腕的壓力值 F 乘以施力處到轉動軸(肘關節)之間的距離 l。因此,如式(1)所示的系統運動方程可簡寫為如式(2)所示:
|
其中,T 為轉矩(單位:N·m),
為編碼器測得的角度[單位:(°)],
為慣性傳感器測得的角速度[單位:(°)/s],K 為彈性參數[單位:N·m/(°)],B 為粘性參數[單位:N·m·s/(°)],C 為偏移量(單位:N·m)。
肢體的機械阻抗特性與肢體的運動息息相關。PD 患者上肢在外力作用下做被動往返運動時存在彈性、粘性特性,彈性部分機械阻抗即彈性系數 K,粘性部分機械阻抗則為粘性系數乘以手臂往返運動的角頻率,即
。因此,系統機械阻抗 Z 為兩部分阻抗之和[23],如式(3)所示:
|
為了獲得機械阻抗 Z,本文采用最小平方參數估計方法求最優擬合參數 K、B、C[24]。令
,
,式(2)可改寫為如式(4)所示的矩陣形式:
|
利用最小二乘算法求得最優的擬合參數
,如式(5)所示:
|
通過式(3)和式(5),可獲得機械阻抗模型中的參數 B、K、C 和 Z。
為了與機械阻抗模型所得的特征參數進行比較,本文還進一步提取文獻[25]中提出的機械功 W 和歸一化機械功 Wnorm 進行分析,通過對比分析不同特征參數與 UPDRS 肌強直癥狀評分之間的相關性來獲得優選的 PD 肌強直癥狀量化檢測參數。機械功 W 定義為受試者手臂做被動往返運動時的轉矩—角位移曲線內面積,如圖 5 所示。為了排除不同受試者手臂動作范圍不同的影響,文獻[25]對機械功進行歸一化處理,從而得到歸一化機械功 Wnorm。以上的數據分析計算均通過數值分析軟件 MATLAB R2014b(MathWorks Inc.,美國)完成。
為了驗證本文方法的有效性,對試驗數據進行了統計分析。病例組 PD 患者和對照組健康人的差異性比較采用獨立 t 檢驗分析,并采用單因素方差分析(analysis of variance,ANOVA)比較不同參數在 UPDRS 評分等級之間的差異是否具有統計學意義。最后,采用 Pearson 相關性分析計算上述 6 個特征參數(彈性參數 K、粘性參數 B、偏移量 C、機械阻抗 Z、機械功 W 和歸一化機械功 Wnorm)與 UPDRS 肌強直癥狀評分的相關性,比較每個參數的相關性大小進而得到優選的量化參數。文中所有的 P 值都為雙邊檢驗,P < 0.05 認為差異具有統計學意義。文中所有統計分析均通過統計分析軟件 IBM SPSS ver.22(IBM SPSS Inc.,美國)完成。
2 臨床試驗結果
如圖 5 所示,為了比較健康人與 PD 患者在執行被動彎曲伸展運動時肘關節呈現出的滯回現象,本文展示了具有代表性的 1 位對照組健康人和 1 位病例組 PD 患者肘關節被動彎曲伸展時的轉矩—角度圖,又稱“滯回曲線”。在力學中,滯回曲線定義為:在力循環往復作用下,結構的荷載—變形曲線,它反映的是在反復受力過程中結構的變形特征、剛度退化及能量消耗[26]。從生物力學角度來看,人體肘關節具有粘彈特性,受試者在外力作用下做被動彎曲伸展運動時,應力與應變呈非線性關系,且在應力周期變化時會產生滯后現象,趨向一個穩定的閉合環,如圖 5 所示,環形面積即為能量的損耗。從圖 5 可以看出,病例組 PD 患者肘關節運動的滯回曲線內面積明顯大于對照組的健康人,即能量損耗明顯大于健康人,說明患者手臂在外力作用下做被動運動時產生的阻力明顯大于健康人。
圖5
試驗者手臂被動往返運動的轉矩—角度關系圖
Figure5.
Torque-angle plots for the passive flexion-extension motion of limbs
本研究中對照組健康人與病例組 PD 患者特征參數的獨立 t 檢驗結果如表 2 所示,彈性參數 K、粘性參數 B、偏移量 C、機械阻抗 Z、機械功 W 和歸一化機械功 Wnorm 參數表現出的差異均具有統計學意義,即 PD 患者組的各參數均值均大于對照組的均值(P < 0.05)。
采用單因素方差分析方法檢驗各個參數在不同 UPDRS 等級(UPDRS 評分等級 0~4)之間的差異,結果如表 3 所示,各參數均值在 5 個評分等級之間的差異均具有統計學意義(P < 0.05),其中機械阻抗 Z 的 F 值最大。
各參數與 UPDRS 肌強直癥狀評分的相關性分析結果如表 4 所示。可以看出,所測參數與受試者 UPDRS 肌強直癥狀評分之間的相關性均具有統計學意義(P < 0.05),其中相關系數最大的是機械阻抗 Z(r = 0.872)。如圖 6 所示為在不同 UPDRS 評分等級下各個特征參數繪制成的箱線圖,從圖 6 可以看出,各參數在不同 UPDRS 評分等級下存在不同程度的差異,而機械阻抗 Z 與 UPDRS 肌強直癥狀評分呈現正相關關系。
圖6
各參數與 UPDRS 肌強直癥狀評分的相關性分析
Figure6.
Box-plots of relations between each calculated parameter and the UPDRS rigidity scores
3 討論
由于 PD 患者肌強直癥狀的表現為特定關節生物力學參數的變化,無法像震顫和運動遲緩一樣可以直接由運動傳感器測量得出,因此臨床醫生對 PD 患者肌強直癥狀的評價結果往往具有主觀性和個體差異性。本文設計的 PD 肌強直癥狀量化檢測系統可方便靈活地采集受試者肘關節被動彎曲伸展的運動信息并進行量化分析。基于該系統進行的臨床試驗可提取受試者手臂肌強直癥狀的量化參數,通過對比分析不同參數與神經內科臨床醫生的 UPDRS 肌強直癥狀評分的相關性大小來尋求優選的量化參數。
本文試驗結果如圖 5 所示,該結果表明,PD 患者相比于健康人手臂被動彎曲伸展時滯回曲線面積(能量損耗)明顯增大,即受到的阻力明顯增大,提示 PD 患者的肘關節肌張力較健康人有所增加。表 2 的結果表明,PD 患者組和對照組健康人相比,肘關節做被動伸展彎曲動作時的彈性參數 K、粘性參數 B、機械阻抗 Z、機械功 W、歸一化機械功 Wnorm 在組間的差異均有統計學意義,PD 患者相比于健康人上述參數值有明顯的增加,可考慮作為客觀指標用于區分 PD 患者與健康人群。
表 3 結果顯示,本文所提取的特征參數在不同 UPDRS 等級間的差異具有統計學意義,驗證了本文 PD 肌強直癥狀量化檢測系統對患者病情程度評估的有效性,相關性分析結果也證實了這一結果。
表 4 和圖 6 的結果表明,該系統測得的機械阻抗 Z 與 UPDRS 肌強直癥狀評分相關系數最大(r = 0.872),隨著 PD 患者肌強直癥狀嚴重程度的增加(UPDRS 肌強直癥狀評分增加),機械阻抗 Z 值明顯增大,機械阻抗 Z 與 UPDRS 肌強直癥狀評分呈正相關關系,可客觀準確地反映患者的病情,因此機械阻抗可作為 PD 肌強直癥狀的優選量化評估參數,幫助醫生進行病情的診斷和監測。
綜上所述,本文設計的 PD 肌強直癥狀量化檢測系統相比 UPDRS 量表評估具有過程簡捷、顯示直觀、評價客觀等優點,可以作為對 PD 病情診斷和療效評估的輔助工具。后續將會對檢測系統的機械結構做進一步優化使其更加輕便、與手臂貼合更加緊密,并且通過更大規模的臨床試驗進行優化改進。
致謝:對本試驗提供幫助的醫務人員和所有參與試驗的試驗者表示感謝!