現有迷宮主要是用于動物學習記憶研究,而在水生動物機器人運動觀察與測試方面還缺乏相應迷宮與方法,為此本文研制了一種帶有分層線和刻度線的雙層多通道的組合式立體水迷宮。該裝置由 1 個正方形底面和 4 個長方形側壁組成的長方體結構,四面側壁通道均由 1 個上層通道和 2 個下層通道組成,4 個上層通道圓心均在側壁垂直中線上,相鄰兩上層通道呈 90° 角,相鄰側壁兩下層通道呈 45° 角,側壁帶有分層線和刻度線,可測試水生動物所處的空間位置與運動軌跡。將鯉魚機器人置入水迷宮進行水下實驗檢測,鯉魚機器人(n = 10)進行 135°、90° 和 45° 的左右轉向及前進運動成功率均超過 60%,表明該裝置可實現鯉魚機器人運動的觀察與測試。
引用本文: 彭勇, 韓曉曉, 王婷婷, 劉洋, 閆艷紅, 劉佳寧, 張凡, 蘇洋洋. 測試水生動物機器人運動的水迷宮. 生物醫學工程學雜志, 2018, 35(3): 429-434. doi: 10.7507/1001-5515.201712082 復制
版權信息: ?四川大學華西醫院華西期刊社《生物醫學工程學雜志》版權所有,未經授權不得轉載、改編
引言
動物機器人生物行為控制是當今世界一個新興的前沿科技領域,人類通過對動物機器人的有效控制可使其執行多種任務,尤其在水生動物機器人領域。2004 年,美國通過植入鯊魚腦電極遙控其運動,并利用鯊魚對水中電流信號的探測能力,跟蹤海面貨船上遺漏的化學品[1]。2005 年,俄羅斯在海龜身上搭載控制裝置,遙控海龜進行偵查活動和生態環境監測[2-3]。2009 年,日本將無線控制刺激器搭載在金魚頭部,刺激中腦控制金魚的前進和轉向[4]。2007 年,我國燕山大學也初步實現了對鯉魚機器人的無線遙控控制[5]。
在動物機器人的基礎性實驗研究方面,迷宮裝置可被用來對動物機器人的控制能力進行觀察與評估。19 世紀末,Lubbock 首先在昆蟲的開創性實驗研究中發明了迷宮方法,從此研究者又發明了多種迷宮用于科研和教學。目前在各類研究中最常用的有 T 迷宮及其變式、Y 迷宮[6]以及 4 臂以上的放射臂迷宮和水迷宮,其中 Morris 水迷宮(Morris water maze,MWM)是由 Morris[7]于 1981 年發明的用于動物空間位置感和方向感(空間定位)以及學習記憶能力研究的測試裝置[8],在國際上已得到廣泛應用。該實驗模型已成為研究學習記憶的常用方法之一[9-10]。該模式是在迷宮內注入水,將大鼠放入迷宮內,通過觀察大鼠尋找站臺所用的時間、距離、朝向角度和策略等行為數據測試大鼠學習記憶能力[11-16]。在應用迷宮過程中,Markowska 等[17]用一個不對稱的多重 T 迷宮,提供了一種平衡方法來評估哺乳動物中發現的導航學習和記憶的兩種形式。而 Guariglia 等[18]通過結合 MWM 和 T 迷宮的要素,設計了一個水 T 迷宮測定法,用于測定小鼠重復行為。
到目前為止,國際上現有的迷宮多用于測試爬行動物、鳥類動物和陸地哺乳動物的空間位置感和方向感(空間定位)以及學習記憶能力,而能用于水生動物機器人運動控制能力測試的迷宮及其方法尚未見文獻報道。對此,作者基于傳統的迷宮在設計與應用方面進行了創新與拓展,設計并制作了一種主要用于水生動物機器人運動觀察與測試的水迷宮。
1 設計思路
本文將水迷宮設計成一長方體結構,在實驗時先將其放在實驗水池中組裝,再灌水使用,水面高度可根據實驗需要來定。
為了觀察與測試水生動物的上浮與下潛運動,在本裝置側壁上設計上、下兩層圓孔通道,并在側壁上設置上、下兩條分層線。為了觀察與測試水生動物的轉向運動,設計相鄰側壁的通道互成一定角度。為能夠對水生動物的空間位置與運動軌跡進行量化測試,在側壁設置垂直刻度線以及在底層設置水平刻度線。為增強本裝置在水中的穩定性,在裝置底部增加固定底座。
在應用時,可以通過通道以及分層線和刻度線設置多種規劃路徑。本裝置既可以用于水生動物機器人的三維立體空間位置、運動軌跡、多角度控制能力的觀察與測試,還可用于水生動物學習記憶能力的觀察與測試。
2 裝置結構
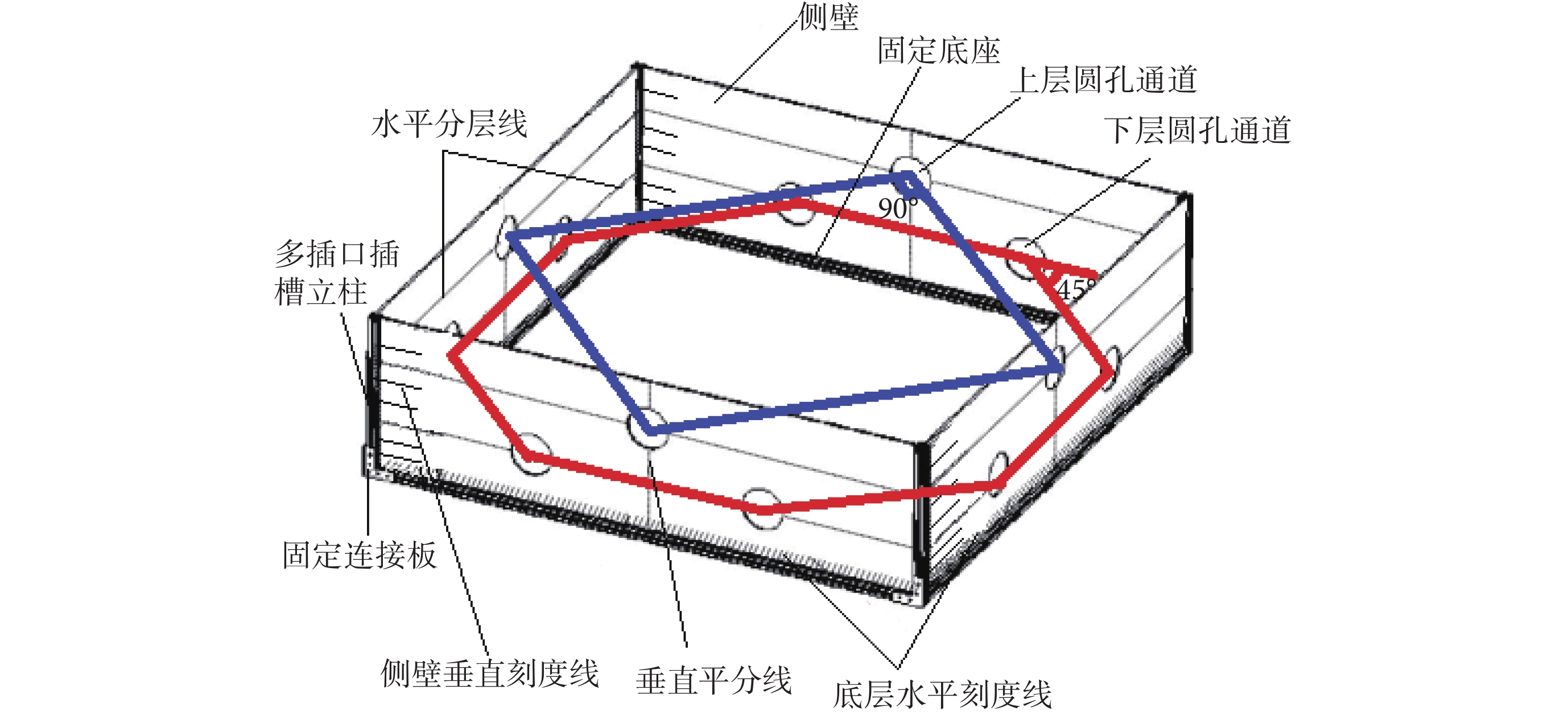
如圖 1 和圖 2 所示,本文設計的一種帶有分層線和刻度線的雙層多通道的組合式立體水迷宮為一長方體結構,由固定底座、長方形側壁、多插口插槽立柱等組成。固定底座是將 4 根多插口插槽立柱擺放成正方形,再通過外角件、T 型螺栓和法蘭螺母在正方形 4 角處將相鄰兩插槽連接固定,從而形成一個固定底座。多插口插槽立柱有 4 個插口。內角件、L 型連接板、T 型螺栓與螺母共同用于固定底座與插槽立柱的連接固定,將固定底座與立柱組合成框架,再將 4 個側壁依次插入相應插槽內從而組裝成本裝置。
本裝置有 4 個側壁,每個側壁均有 3 個圓孔作為通道,通道分為上、下兩層,即一個上層通道和兩個下層通道,上層通道與下層通道呈等腰三角形關系。上層通道共有 4 個,圓心在側壁垂直中線上。如圖 1 所示,用藍色線條將上層的四個圓孔通道連接成正方形,相鄰兩圓孔通道所成角度為 90°;用紅色線條將下層的八個圓孔通道連接成八邊形,每個內角為 135°,但夾角通常是用銳角來表示的,所以用 135° 的補角即 45° 作為相鄰兩個側壁的圓孔通道互成的角度。
本裝置側壁設置有分層線,上、下兩條水平分層線分別經上層和下層通道圓心貫通整個側壁,從而將水迷宮分為上、中、下三層;側壁設置一條垂直平分線,垂直平分線經上層通道圓心在垂直方向上貫通整個側壁,4 個側壁垂直平分線的連線可將迷宮分為四個區;側壁設置有刻度線,刻度線分為底層水平刻度線和側壁垂直刻度線。
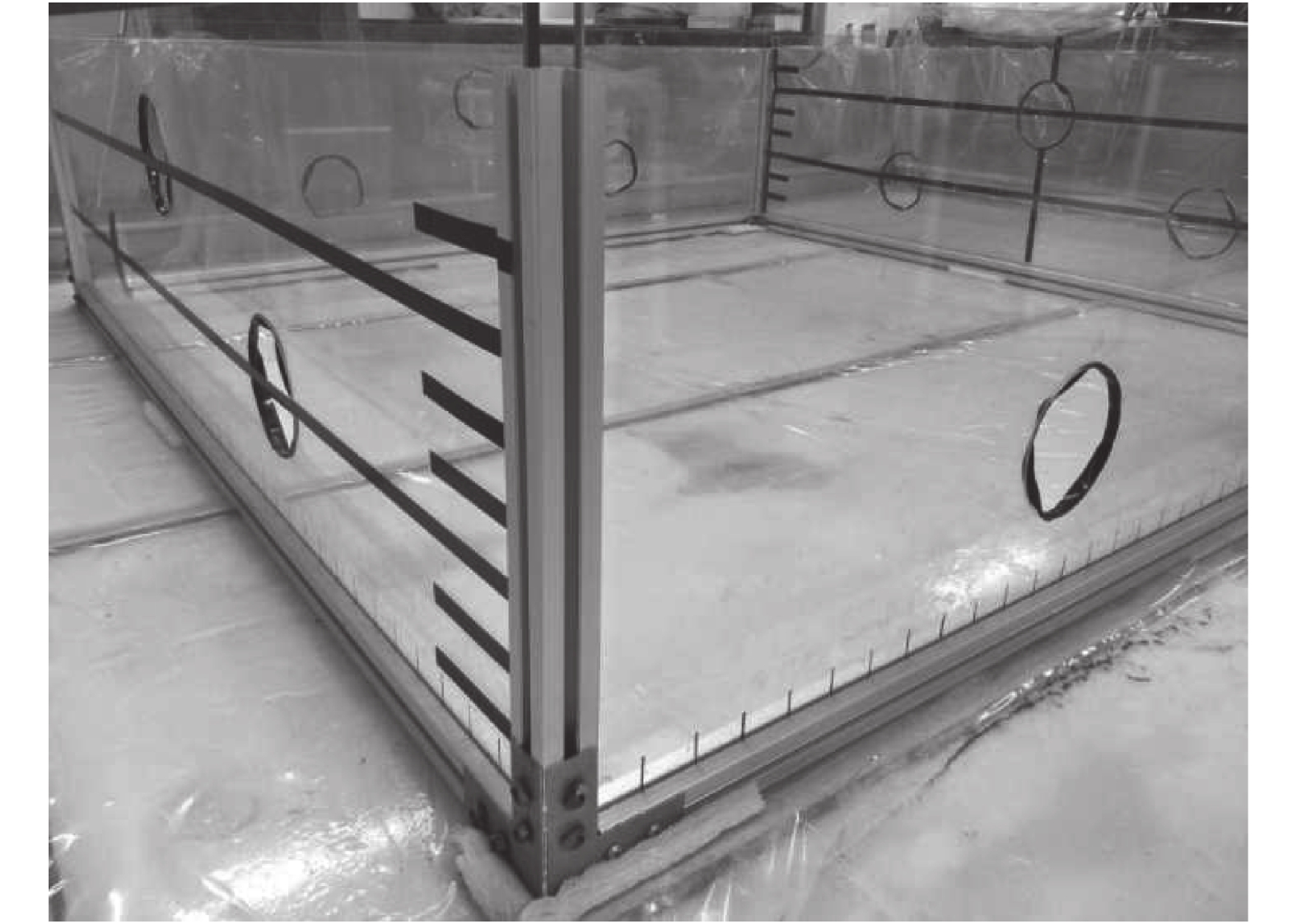
我們制作的由有機玻璃構成的水迷宮長為 200 cm,寬為 200 cm,高為 55 cm;圓孔直徑為 15 cm;上層通道的圓心距側壁上緣為 17.5 cm,距兩側邊緣均為 100 cm;下層通道的圓心距側壁下緣為 17.5 cm,距兩側邊緣分別為 58.5 cm 和 141.5 cm(見圖 2)。本裝置已獲國家專利(ZL 2017 2 0208282.3)[19]。
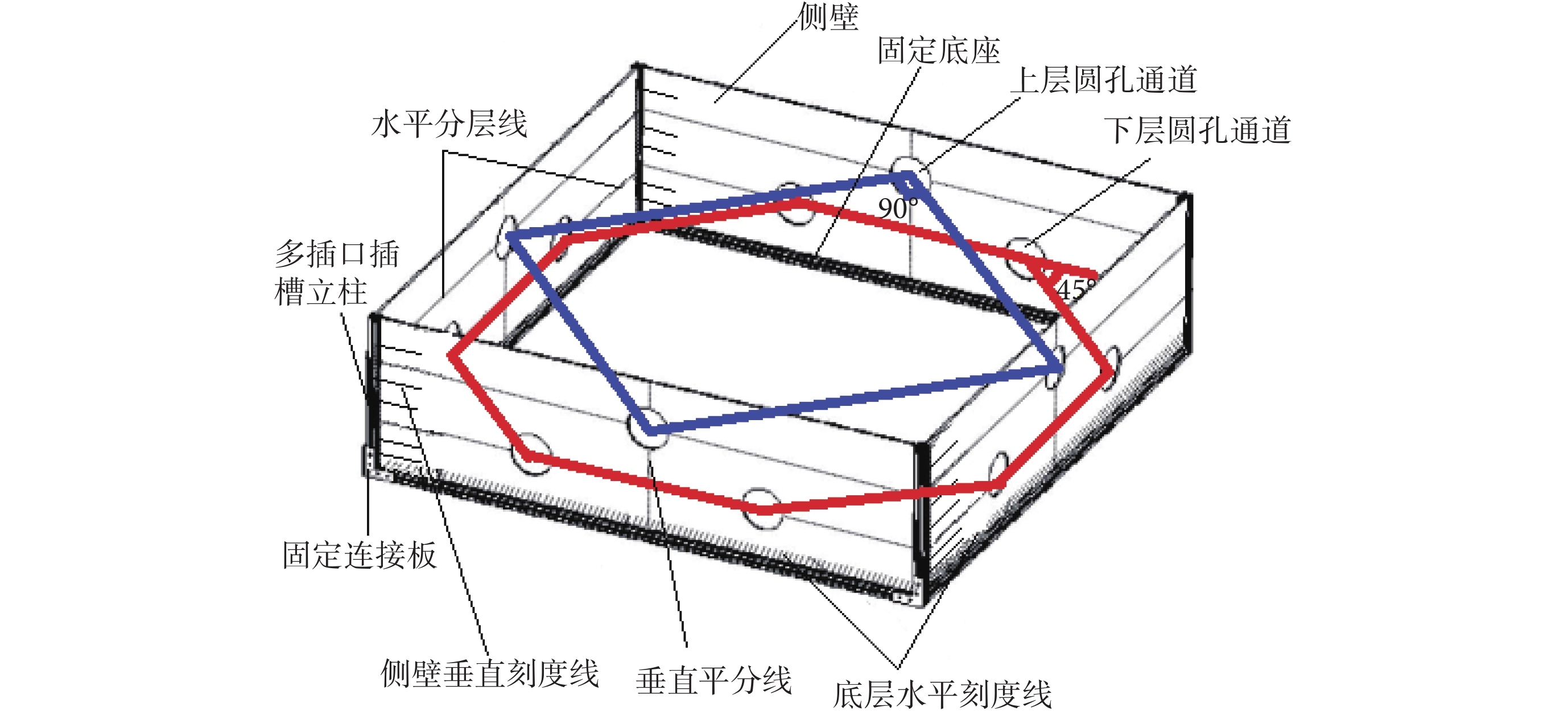 圖1
水迷宮示意圖
Figure1.
Sketch map of water maze
圖1
水迷宮示意圖
Figure1.
Sketch map of water maze
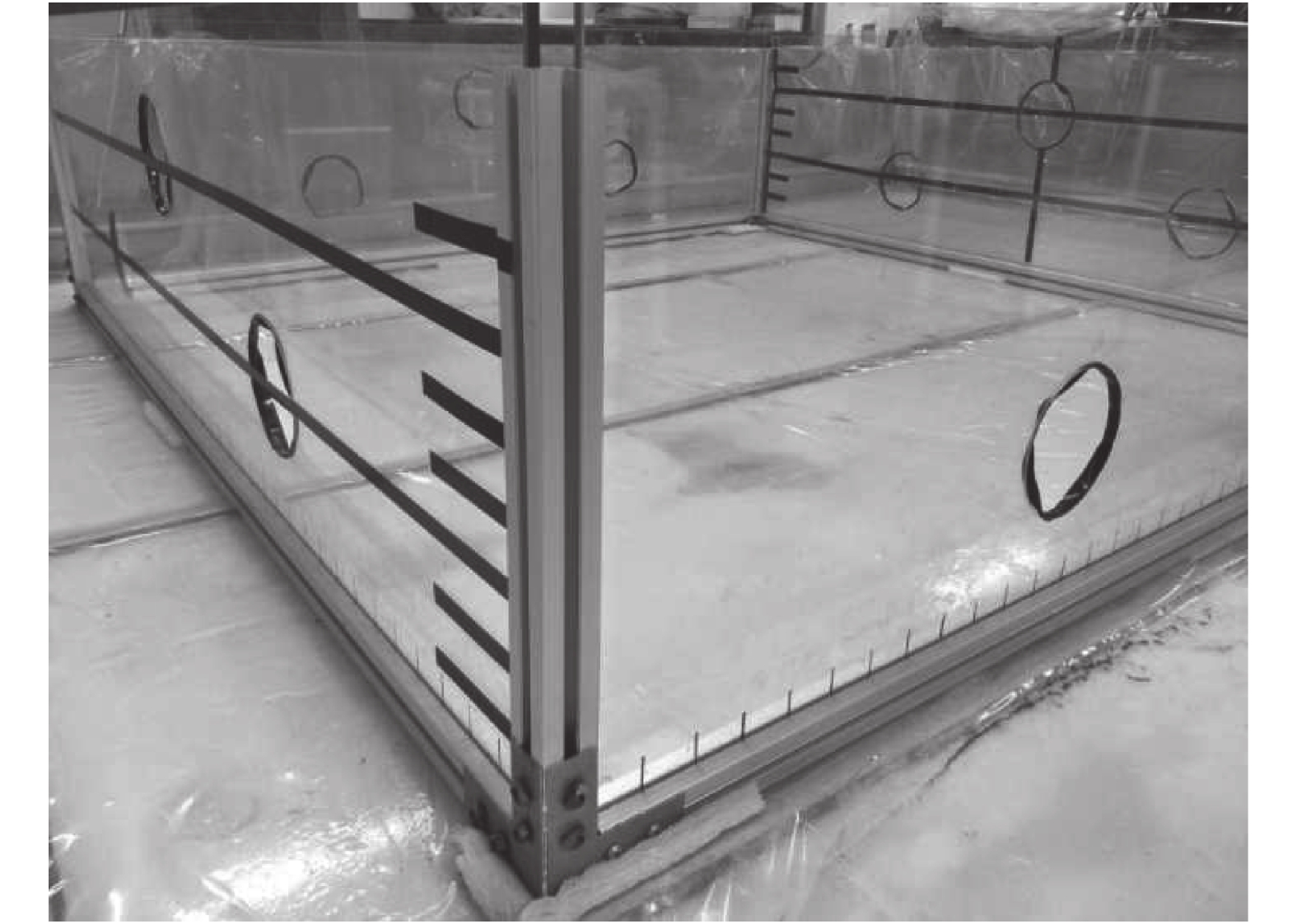 圖2
水迷宮實物圖
Figure2.
Physical map of water maze
圖2
水迷宮實物圖
Figure2.
Physical map of water maze
3 水生動物機器人運動控制實驗
為對本文裝置與應用方法進行檢驗,我們應用本裝置進行了鯉魚機器人運動控制實驗。
3.1 實驗方法
在實驗水池中,先將本裝置的底座與多插口插槽立柱等進行安裝,將 4 個側壁依次插入相應的多插口插槽立柱內,組裝水迷宮,再向實驗水池和水迷宮內注水,水面高度根據實驗需要而定。
將實驗鯉魚 10 尾放在 0.36 mol/L 丁香酚溶液中進行藥浴麻醉。
應用開顱鉆在鯉魚顱骨上鉆孔,借助腦立體定位儀將腦電極植入鯉魚腦運動區,將微刺激器搭載于鯉魚身上,將制作的鯉魚機器人置于水迷宮裝置內。
應用無線通信遙控系統對鯉魚機器人進行無線遙控,在個人電腦(personal computer,PC)的控制面板上調節刺激信號發生器的參數,由無線控制裝置發出模擬電生理信號,通過腦電極電刺激腦運動區來控制鯉魚機器人的運動以完成規劃路徑,到達水迷宮中預定的通道。
在實驗時,本研究選定水迷宮某一通道位置作為出發點,控制鯉魚機器人到達指定的通道圓孔,進行直線前進、左轉 135°、右轉 135°、左轉 90°、右轉 90°、左轉 45°、右轉 45° 運動的測試。本研究將鯉魚機器人能夠通過或到達指定的通道為實驗成功標準。
3.2 實驗結果
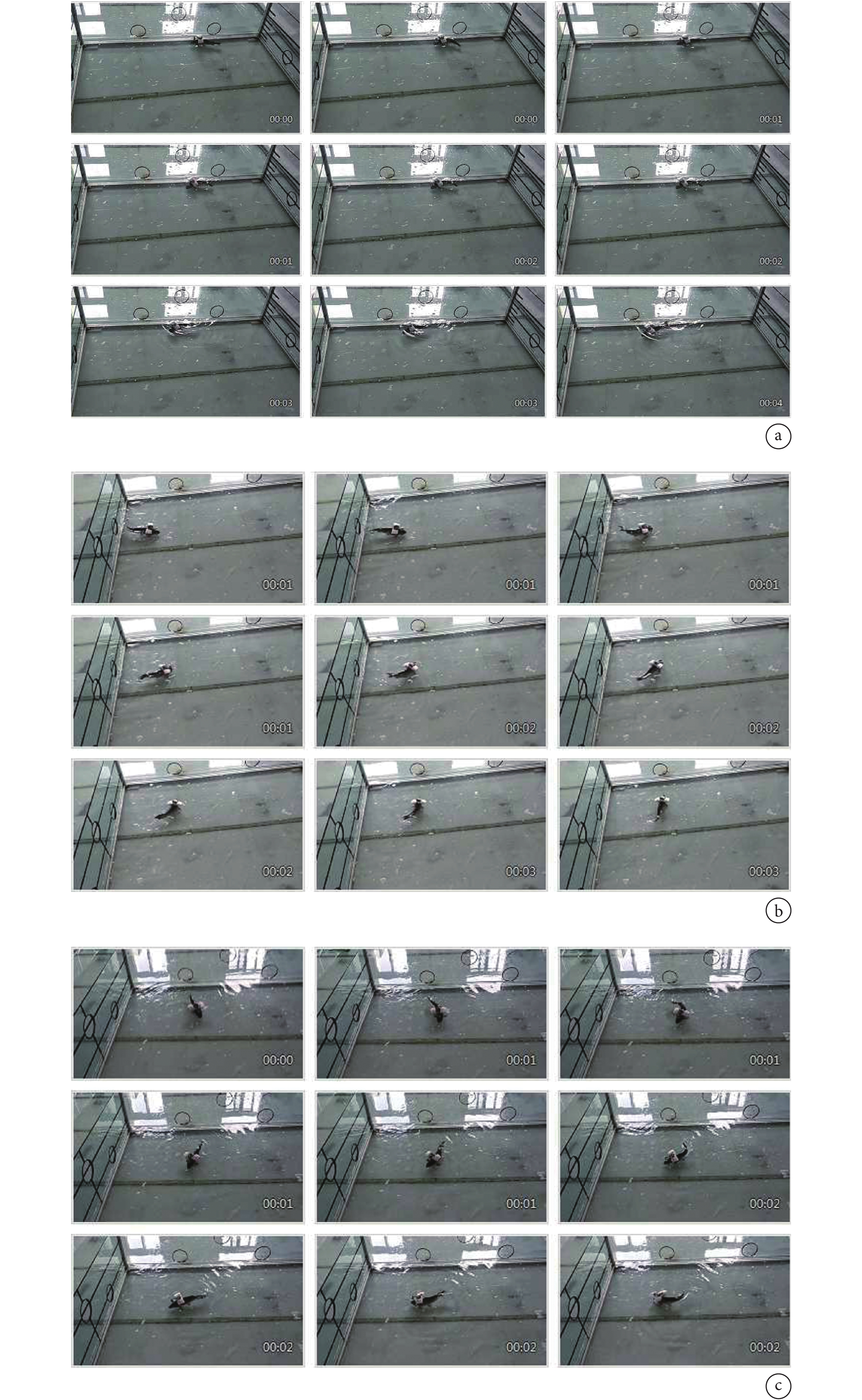
我們對鯉魚機器人運動控制的水下實驗進行了拍攝,觀察到鯉魚機器人在本裝置內的前進和轉向等運動,本文以直線前進、左轉 90° 和右轉 90° 運動為例展示視頻截圖(見圖 3)。
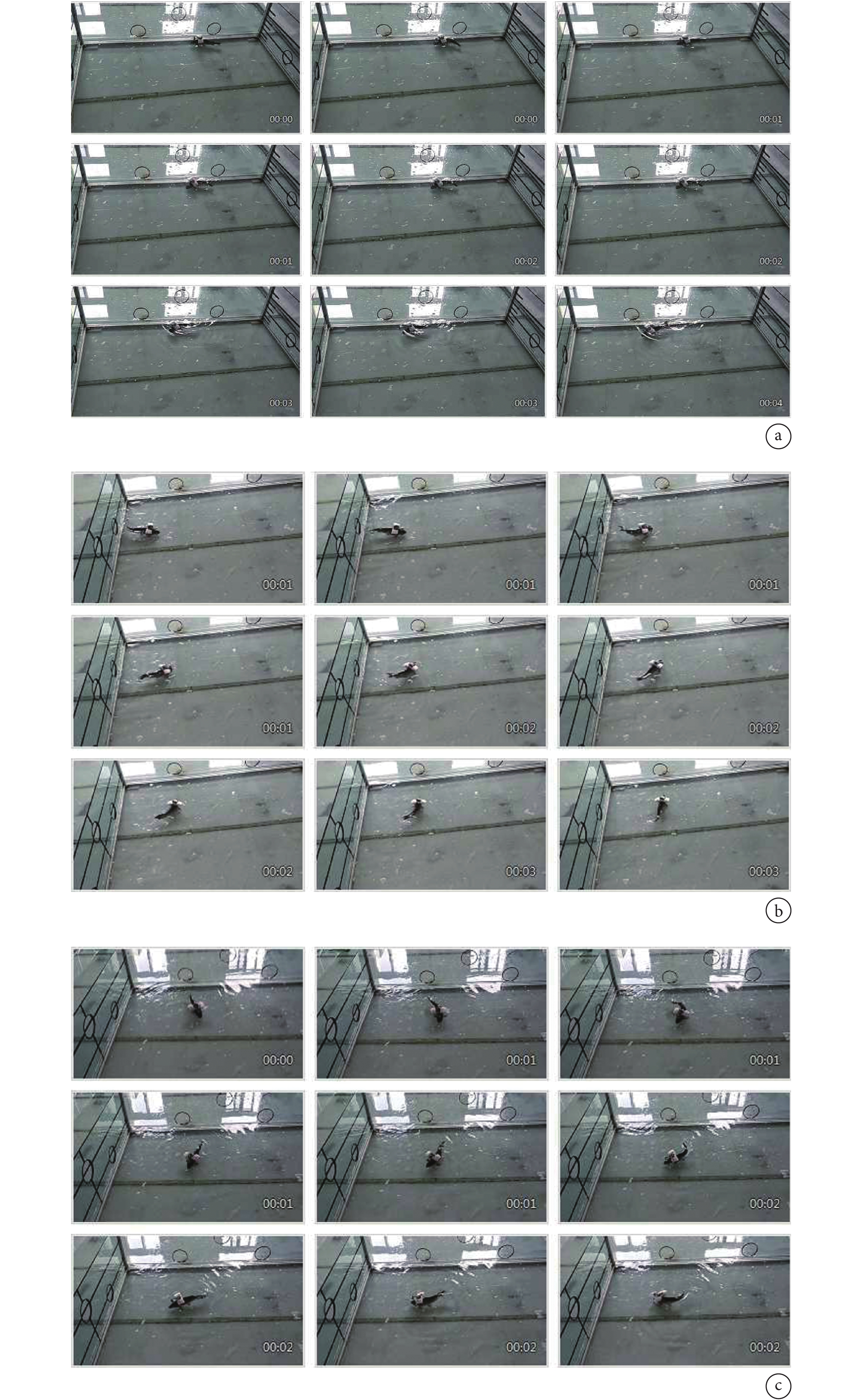 圖3
水迷宮內鯉魚機器人無線遙控實驗
圖3
水迷宮內鯉魚機器人無線遙控實驗
a. 鯉魚機器人前進運動;b. 鯉魚機器人左轉向運動;c. 鯉魚機器人右轉向運動
Figure3. The wireless remote control experiment of carp robot in water mazea. the forward movement of carp robot; b. the left movement of carp robot; c. the right movement of carp robot
如圖 3a 所示,鯉魚機器人從下層某一圓孔通道位置出發直線運動到達同一側壁下層圓孔通道位置,并由側壁水平刻度線可測知鯉魚機器人前進的距離;如圖 3b 和圖 3c 所示,鯉魚機器人從某一側壁下層一個通道出發經左轉向或右轉向運動到達相鄰側壁通道,所走路徑與兩相鄰側壁之間通道連線構成等腰直角三角形,故所轉角度為 90°。
本研究將鯉魚機器人(n = 10)分別放入水迷宮裝置內,應用無線通信遙控系統控制鯉魚機器人在水迷宮中進行了直線前進、左轉 135°、右轉 135°、左轉 90°、右轉 90°、左轉 45° 和右轉 45° 的運動,實驗測試的成功率如表 1 所示。
4 討論
自從 1981 年英國著名心理學家 Morris 設計出 Morris 水迷宮以來,Morris 水迷宮就作為一種重要的實驗工具和研究方法在世界上被廣泛應用于學習記憶等方面的科學研究,之后人們又根據科學研究的需要在經典 Morris 水迷宮的基礎上進行了不斷的改進與發展。基于已有的迷宮,我們在迷宮裝置結構與應用方面也進行了一定創新與拓展,研制了一種帶有分層線和刻度線的雙層多通道的組合式立體水迷宮,不僅適用于水生動物學習記憶的實驗研究,還更適用于水生動物機器人運動控制能力的觀察與測試。
國際上常用的迷宮如 Morris 水迷宮[9]、Y 迷宮[6]、T 迷宮[20]、八臂迷宮[21]等均是單層結構特征的迷宮裝置,能夠很好地用于陸地動物二維平面運動的實驗研究。但水生動物的運動特點為三維立體運動,所以已有的迷宮尚不能實現對水生動物三維立體運動的觀察與測試。而本文裝置側壁設置了上、下兩層通道以及兩條水平分層線,水平分層線將迷宮分為上、中、下三層,使本裝置具有了分層功能,可以解決這個問題。
現有的迷宮主要是為了觀察與測試動物的學習和記憶能力,通常未設置刻度線。而本文裝置是為了對水生動物的三維立體空間位置與運動軌跡進行觀察與測試,故在側壁上設置了一條垂直平分線和刻度線,4 個側壁上垂直平分線的連線可將水迷宮分為 4 個區。因此,本裝置不僅具有多個通道而且還設置了分層線和刻度線,將這三者結合可實現對水生動物所處的空間位置和運動軌跡以及多角度轉向的量化測試,尤其適合于將迷宮與計算機視覺技術結合使用。
本文裝置設計多個通道,各個通道之間具有一定的角度關系,可以用來對動物的轉向運動進行觀察與測試。在本實驗中,控制鯉魚機器人在水迷宮內進行直線前進、左轉 135°、右轉 135°、左轉 90°、右轉 90°、左轉 45° 和右轉 45° 的運動,結果表明,鯉魚機器人(n = 10)的實驗成功率均在 60% 以上(見表 1)。由此我們認為,本文裝置與使用方法可以實現水生動物運動的觀察與測試,是具有可靠性、可行性、科學性和實用性的。
傳統的迷宮一般為整體結構裝置,不可拆分與組合,不便搬運且長期占地。而本文裝置拆卸方便,組裝簡單,易于搬運,不需長時間占用實驗場地,功能多樣,內容豐富,具有較強的靈活性和實用性。
本文裝置除了可以用于水生動物機器人的實驗研究外,還可以考慮用于水生動物學習和記憶的實驗研究。盡管目前我們還沒有進行一定數量的相關實驗,但根據已有迷宮的原理與方法,再結合本研究的鯉魚機器人運動控制檢測實驗,我們推斷本裝置可以用于水生動物學習和記憶的研究。如果將水生動物放入本裝置內,統計動物沿著規劃路徑找到食物的正確率與訓練次數的關系,再對完成預定目標的動物給予食物獎勵,能夠開展水生動物學習和記憶方面的實驗研究。這也是我們下一步將要考慮的研究工作。
動物機器人生物行為控制是一個嶄新的科技領域,所以目前用于動物機器人實驗研究的迷宮極少。現雖有三臂迷宮裝置[22],但該裝置主要是面向大鼠等陸地動物機器人使用的迷宮,還不適合用于具有三維立體運動特點的水生動物機器人實驗研究。基于水生動物機器人運動控制實驗測試與評估的需要,本文裝置與使用方法具有一定的科學性與實用性。另外,本文僅以鯉魚為例,設計并制作了一種水迷宮。而在實際應用中,人們可根據實驗對象和科學研究的需要,對本裝置的參數和結構進行調整與制作,靈活運用,以實現多種實驗功能。
5 結語
本文提出了一種帶有分層線和刻度線的雙層多通道的組合式立體水迷宮。本文裝置具有可拆分可組合、穩定性強、分層分區、可量化測試、可多角度轉向的特點。經鯉魚機器人水下運動控制檢測實驗,提示本裝置可實現水生動物運動的觀察與測試。本裝置主要面向水生動物機器人的三維立體空間位置、運動軌跡、多角度轉向的觀察與測試,也可用于水生動物學習記憶能力的科學研究。
引言
動物機器人生物行為控制是當今世界一個新興的前沿科技領域,人類通過對動物機器人的有效控制可使其執行多種任務,尤其在水生動物機器人領域。2004 年,美國通過植入鯊魚腦電極遙控其運動,并利用鯊魚對水中電流信號的探測能力,跟蹤海面貨船上遺漏的化學品[1]。2005 年,俄羅斯在海龜身上搭載控制裝置,遙控海龜進行偵查活動和生態環境監測[2-3]。2009 年,日本將無線控制刺激器搭載在金魚頭部,刺激中腦控制金魚的前進和轉向[4]。2007 年,我國燕山大學也初步實現了對鯉魚機器人的無線遙控控制[5]。
在動物機器人的基礎性實驗研究方面,迷宮裝置可被用來對動物機器人的控制能力進行觀察與評估。19 世紀末,Lubbock 首先在昆蟲的開創性實驗研究中發明了迷宮方法,從此研究者又發明了多種迷宮用于科研和教學。目前在各類研究中最常用的有 T 迷宮及其變式、Y 迷宮[6]以及 4 臂以上的放射臂迷宮和水迷宮,其中 Morris 水迷宮(Morris water maze,MWM)是由 Morris[7]于 1981 年發明的用于動物空間位置感和方向感(空間定位)以及學習記憶能力研究的測試裝置[8],在國際上已得到廣泛應用。該實驗模型已成為研究學習記憶的常用方法之一[9-10]。該模式是在迷宮內注入水,將大鼠放入迷宮內,通過觀察大鼠尋找站臺所用的時間、距離、朝向角度和策略等行為數據測試大鼠學習記憶能力[11-16]。在應用迷宮過程中,Markowska 等[17]用一個不對稱的多重 T 迷宮,提供了一種平衡方法來評估哺乳動物中發現的導航學習和記憶的兩種形式。而 Guariglia 等[18]通過結合 MWM 和 T 迷宮的要素,設計了一個水 T 迷宮測定法,用于測定小鼠重復行為。
到目前為止,國際上現有的迷宮多用于測試爬行動物、鳥類動物和陸地哺乳動物的空間位置感和方向感(空間定位)以及學習記憶能力,而能用于水生動物機器人運動控制能力測試的迷宮及其方法尚未見文獻報道。對此,作者基于傳統的迷宮在設計與應用方面進行了創新與拓展,設計并制作了一種主要用于水生動物機器人運動觀察與測試的水迷宮。
1 設計思路
本文將水迷宮設計成一長方體結構,在實驗時先將其放在實驗水池中組裝,再灌水使用,水面高度可根據實驗需要來定。
為了觀察與測試水生動物的上浮與下潛運動,在本裝置側壁上設計上、下兩層圓孔通道,并在側壁上設置上、下兩條分層線。為了觀察與測試水生動物的轉向運動,設計相鄰側壁的通道互成一定角度。為能夠對水生動物的空間位置與運動軌跡進行量化測試,在側壁設置垂直刻度線以及在底層設置水平刻度線。為增強本裝置在水中的穩定性,在裝置底部增加固定底座。
在應用時,可以通過通道以及分層線和刻度線設置多種規劃路徑。本裝置既可以用于水生動物機器人的三維立體空間位置、運動軌跡、多角度控制能力的觀察與測試,還可用于水生動物學習記憶能力的觀察與測試。
2 裝置結構
如圖 1 和圖 2 所示,本文設計的一種帶有分層線和刻度線的雙層多通道的組合式立體水迷宮為一長方體結構,由固定底座、長方形側壁、多插口插槽立柱等組成。固定底座是將 4 根多插口插槽立柱擺放成正方形,再通過外角件、T 型螺栓和法蘭螺母在正方形 4 角處將相鄰兩插槽連接固定,從而形成一個固定底座。多插口插槽立柱有 4 個插口。內角件、L 型連接板、T 型螺栓與螺母共同用于固定底座與插槽立柱的連接固定,將固定底座與立柱組合成框架,再將 4 個側壁依次插入相應插槽內從而組裝成本裝置。
本裝置有 4 個側壁,每個側壁均有 3 個圓孔作為通道,通道分為上、下兩層,即一個上層通道和兩個下層通道,上層通道與下層通道呈等腰三角形關系。上層通道共有 4 個,圓心在側壁垂直中線上。如圖 1 所示,用藍色線條將上層的四個圓孔通道連接成正方形,相鄰兩圓孔通道所成角度為 90°;用紅色線條將下層的八個圓孔通道連接成八邊形,每個內角為 135°,但夾角通常是用銳角來表示的,所以用 135° 的補角即 45° 作為相鄰兩個側壁的圓孔通道互成的角度。
本裝置側壁設置有分層線,上、下兩條水平分層線分別經上層和下層通道圓心貫通整個側壁,從而將水迷宮分為上、中、下三層;側壁設置一條垂直平分線,垂直平分線經上層通道圓心在垂直方向上貫通整個側壁,4 個側壁垂直平分線的連線可將迷宮分為四個區;側壁設置有刻度線,刻度線分為底層水平刻度線和側壁垂直刻度線。
我們制作的由有機玻璃構成的水迷宮長為 200 cm,寬為 200 cm,高為 55 cm;圓孔直徑為 15 cm;上層通道的圓心距側壁上緣為 17.5 cm,距兩側邊緣均為 100 cm;下層通道的圓心距側壁下緣為 17.5 cm,距兩側邊緣分別為 58.5 cm 和 141.5 cm(見圖 2)。本裝置已獲國家專利(ZL 2017 2 0208282.3)[19]。
圖1
水迷宮示意圖
Figure1.
Sketch map of water maze
圖2
水迷宮實物圖
Figure2.
Physical map of water maze
3 水生動物機器人運動控制實驗
為對本文裝置與應用方法進行檢驗,我們應用本裝置進行了鯉魚機器人運動控制實驗。
3.1 實驗方法
在實驗水池中,先將本裝置的底座與多插口插槽立柱等進行安裝,將 4 個側壁依次插入相應的多插口插槽立柱內,組裝水迷宮,再向實驗水池和水迷宮內注水,水面高度根據實驗需要而定。
將實驗鯉魚 10 尾放在 0.36 mol/L 丁香酚溶液中進行藥浴麻醉。
應用開顱鉆在鯉魚顱骨上鉆孔,借助腦立體定位儀將腦電極植入鯉魚腦運動區,將微刺激器搭載于鯉魚身上,將制作的鯉魚機器人置于水迷宮裝置內。
應用無線通信遙控系統對鯉魚機器人進行無線遙控,在個人電腦(personal computer,PC)的控制面板上調節刺激信號發生器的參數,由無線控制裝置發出模擬電生理信號,通過腦電極電刺激腦運動區來控制鯉魚機器人的運動以完成規劃路徑,到達水迷宮中預定的通道。
在實驗時,本研究選定水迷宮某一通道位置作為出發點,控制鯉魚機器人到達指定的通道圓孔,進行直線前進、左轉 135°、右轉 135°、左轉 90°、右轉 90°、左轉 45°、右轉 45° 運動的測試。本研究將鯉魚機器人能夠通過或到達指定的通道為實驗成功標準。
3.2 實驗結果
我們對鯉魚機器人運動控制的水下實驗進行了拍攝,觀察到鯉魚機器人在本裝置內的前進和轉向等運動,本文以直線前進、左轉 90° 和右轉 90° 運動為例展示視頻截圖(見圖 3)。
圖3
水迷宮內鯉魚機器人無線遙控實驗
a. 鯉魚機器人前進運動;b. 鯉魚機器人左轉向運動;c. 鯉魚機器人右轉向運動
Figure3. The wireless remote control experiment of carp robot in water mazea. the forward movement of carp robot; b. the left movement of carp robot; c. the right movement of carp robot
如圖 3a 所示,鯉魚機器人從下層某一圓孔通道位置出發直線運動到達同一側壁下層圓孔通道位置,并由側壁水平刻度線可測知鯉魚機器人前進的距離;如圖 3b 和圖 3c 所示,鯉魚機器人從某一側壁下層一個通道出發經左轉向或右轉向運動到達相鄰側壁通道,所走路徑與兩相鄰側壁之間通道連線構成等腰直角三角形,故所轉角度為 90°。
本研究將鯉魚機器人(n = 10)分別放入水迷宮裝置內,應用無線通信遙控系統控制鯉魚機器人在水迷宮中進行了直線前進、左轉 135°、右轉 135°、左轉 90°、右轉 90°、左轉 45° 和右轉 45° 的運動,實驗測試的成功率如表 1 所示。
4 討論
自從 1981 年英國著名心理學家 Morris 設計出 Morris 水迷宮以來,Morris 水迷宮就作為一種重要的實驗工具和研究方法在世界上被廣泛應用于學習記憶等方面的科學研究,之后人們又根據科學研究的需要在經典 Morris 水迷宮的基礎上進行了不斷的改進與發展。基于已有的迷宮,我們在迷宮裝置結構與應用方面也進行了一定創新與拓展,研制了一種帶有分層線和刻度線的雙層多通道的組合式立體水迷宮,不僅適用于水生動物學習記憶的實驗研究,還更適用于水生動物機器人運動控制能力的觀察與測試。
國際上常用的迷宮如 Morris 水迷宮[9]、Y 迷宮[6]、T 迷宮[20]、八臂迷宮[21]等均是單層結構特征的迷宮裝置,能夠很好地用于陸地動物二維平面運動的實驗研究。但水生動物的運動特點為三維立體運動,所以已有的迷宮尚不能實現對水生動物三維立體運動的觀察與測試。而本文裝置側壁設置了上、下兩層通道以及兩條水平分層線,水平分層線將迷宮分為上、中、下三層,使本裝置具有了分層功能,可以解決這個問題。
現有的迷宮主要是為了觀察與測試動物的學習和記憶能力,通常未設置刻度線。而本文裝置是為了對水生動物的三維立體空間位置與運動軌跡進行觀察與測試,故在側壁上設置了一條垂直平分線和刻度線,4 個側壁上垂直平分線的連線可將水迷宮分為 4 個區。因此,本裝置不僅具有多個通道而且還設置了分層線和刻度線,將這三者結合可實現對水生動物所處的空間位置和運動軌跡以及多角度轉向的量化測試,尤其適合于將迷宮與計算機視覺技術結合使用。
本文裝置設計多個通道,各個通道之間具有一定的角度關系,可以用來對動物的轉向運動進行觀察與測試。在本實驗中,控制鯉魚機器人在水迷宮內進行直線前進、左轉 135°、右轉 135°、左轉 90°、右轉 90°、左轉 45° 和右轉 45° 的運動,結果表明,鯉魚機器人(n = 10)的實驗成功率均在 60% 以上(見表 1)。由此我們認為,本文裝置與使用方法可以實現水生動物運動的觀察與測試,是具有可靠性、可行性、科學性和實用性的。
傳統的迷宮一般為整體結構裝置,不可拆分與組合,不便搬運且長期占地。而本文裝置拆卸方便,組裝簡單,易于搬運,不需長時間占用實驗場地,功能多樣,內容豐富,具有較強的靈活性和實用性。
本文裝置除了可以用于水生動物機器人的實驗研究外,還可以考慮用于水生動物學習和記憶的實驗研究。盡管目前我們還沒有進行一定數量的相關實驗,但根據已有迷宮的原理與方法,再結合本研究的鯉魚機器人運動控制檢測實驗,我們推斷本裝置可以用于水生動物學習和記憶的研究。如果將水生動物放入本裝置內,統計動物沿著規劃路徑找到食物的正確率與訓練次數的關系,再對完成預定目標的動物給予食物獎勵,能夠開展水生動物學習和記憶方面的實驗研究。這也是我們下一步將要考慮的研究工作。
動物機器人生物行為控制是一個嶄新的科技領域,所以目前用于動物機器人實驗研究的迷宮極少。現雖有三臂迷宮裝置[22],但該裝置主要是面向大鼠等陸地動物機器人使用的迷宮,還不適合用于具有三維立體運動特點的水生動物機器人實驗研究。基于水生動物機器人運動控制實驗測試與評估的需要,本文裝置與使用方法具有一定的科學性與實用性。另外,本文僅以鯉魚為例,設計并制作了一種水迷宮。而在實際應用中,人們可根據實驗對象和科學研究的需要,對本裝置的參數和結構進行調整與制作,靈活運用,以實現多種實驗功能。
5 結語
本文提出了一種帶有分層線和刻度線的雙層多通道的組合式立體水迷宮。本文裝置具有可拆分可組合、穩定性強、分層分區、可量化測試、可多角度轉向的特點。經鯉魚機器人水下運動控制檢測實驗,提示本裝置可實現水生動物運動的觀察與測試。本裝置主要面向水生動物機器人的三維立體空間位置、運動軌跡、多角度轉向的觀察與測試,也可用于水生動物學習記憶能力的科學研究。