在基于角膜地形圖的淚膜穩定性評估中,針對眼動、睫毛反射和背景干擾,本文提出了一種淚膜視頻的預處理算法。首先,利用索貝爾算子(Sobel operator)進行模糊圖像檢測,然后對灰度圖像進行形態學開運算以獲取環狀圖樣凸顯的目標圖像,再通過霍夫圓檢測以及快速傅里葉變換提取目標圖像的環狀圖樣頻率,依據環狀圖樣頻率對目標圖像進行帶通濾波。最后,二值化及形態學閉運算用于確定環狀圖樣區域。本文從數據庫中隨機選取 10 段淚膜視頻,應用上述算法逐幀進行淚膜圖像處理。實驗結果表明,該算法有效地去除了視頻序列中的無效圖像,并實現了環狀圖樣的定位,為后續淚膜穩定性的評估奠定了基礎。
引用本文: 陳延平, 劉孟珂, 顏黃蘋, 方正. 基于角膜地形圖的淚膜視頻預處理. 生物醫學工程學雜志, 2019, 36(6): 1018-1023. doi: 10.7507/1001-5515.201804033 復制
版權信息: ?四川大學華西醫院華西期刊社《生物醫學工程學雜志》版權所有,未經授權不得轉載、改編
引言
角膜地形圖是一種常見的眼科診斷技術,常用于確定屈光度、淚膜穩定性等眼表疾病參數,其中淚膜穩定性是臨床上診斷干眼的關鍵標志[1-2]。角膜地形圖評估淚膜穩定性的原理是普拉西多盤(Placido disk)結構光成像[2-3],即通過環狀結構光從角膜前表面反射,再經過光學系統,最終成像于電荷耦合元件等光學傳感器。
角膜地形圖圖像采集過程中往往會受到眼睛運動、眼瞼狹窄、睫毛濃長以及眼球震顫等不良條件的干擾和影響[4-5]。比如說,眼睛運動(簡稱:眼動)雖然對靜態采集單張圖像影響很小,但在角膜視頻的動態拍攝中,即便是微弱的眼動,也會引起測量期間眼坐標的移動[6-7],瞬目反射或幅度大的眼球運動往往會導致個別圖像出現模糊,甚至失去大部分環狀信息,如果再加上背景和睫毛的干擾,將會嚴重影響后續淚膜圖像處理中有效信息的提取和匹配[8]。
淚膜視頻預處理目的在于去除無效圖像以及定位環狀圖樣。現有的淚膜穩定性研究中[4-14],針對淚膜視頻的預處理尚存在一些問題。比如,Schack 等[9]和 Morelande 等[10]分別擬合眼瞼位置和角膜邊緣確定坐標參考點,但是擬合和迭代增加了預處理工作的復雜度,且得到的結果中仍然存在睫毛干擾信息。Iskander 等[11]利用澤日尼克多項式擬合高度表面殘差的平方根,雖然降低了對眼動和視軸的依賴性,但只適合瞬目后淚膜的形成過程,無法觀察后續的淚膜穩定性狀況。Alonso-Caneiro 等[12]通過角膜圖像中心下方 200 × 75 的長方形區域八鄰域的平均一致性來檢測圖像模糊,然而這種方法并不穩定,因為眼動引起的模糊是隨機而不均勻的。隋成華等[13]采用索貝爾算子(Sobel operator)與坎尼算子(Canny operator)相結合的方法進行圖像檢測,但是這種方法主要是依據灰度值確定 8 張初選圖像中最清晰的一張,容易受到光照不均的影響。基于 Iskander 等[11]的方法,Downie 等[14]從原始圖像數據計算淚膜質量的局部特征,卻仍然存在模糊檢測和環心定位等問題。
感興趣區域的定位,例如肝臟分割,是醫療圖像分析中最基本的步驟[15-16]。對于自然器官,模型法已經基本實現了精準而穩定的分割,但基于統計模型和基于水平集的方法并不適合角膜地形圖預處理。與肝臟或者肺部圖像存在自然邊緣不同,角膜圖像屬于結構光成像,主要是由規則的明暗相間的圓環組成,再加上淚膜動態變化的隨機性以及睫毛分布的特異性,不存在形狀模型和圖譜分割的概念。
鑒于以上問題,且依據淚膜圖像的固有特點,本文首先通過 Sobel 算子檢測圖像的模糊程度,剔除模糊圖像后,再運用形態學運算和帶通濾波去除睫毛和背景帶來的干擾,最終實現了環狀圖樣區域的定位。綜上所述,本文提出的淚膜視頻預處理算法,利用全局圖像信息,簡單有效,無需迭代,且不受光照均勻度的影響,適用于真實淚膜圖像的預處理。
1 數據來源
本文使用的所有淚膜視頻均由廈門大學眼科研究所提供,利用三維全自動角膜分析儀(SIRIUS-antares,Costruzione Strumenti Oftalmici Inc.,意大利)進行圖像采集。受試者選取年齡在 21~51 歲之間的 10 名志愿者(5 男、5 女)作為研究對象,受試者均無隱形眼鏡佩戴史。相同的條件下,由同一位眼科醫師對每位受試者進行 3 次淚膜視頻的拍攝,每次拍攝之間休息放松 5 min,所有受試者均已簽署知情同意書。本課題組獲得廈門大學眼科研究所授權可使用以上數據,研究符合赫爾辛基宣言的相關倫理要求,且已經通過廈門大學醫學院倫理委員會的審查。
圖像的處理分析在仿真軟件 MATLAB R2013a(8.1)(MathWorks Inc.,美國)中進行。
2 預處理算法
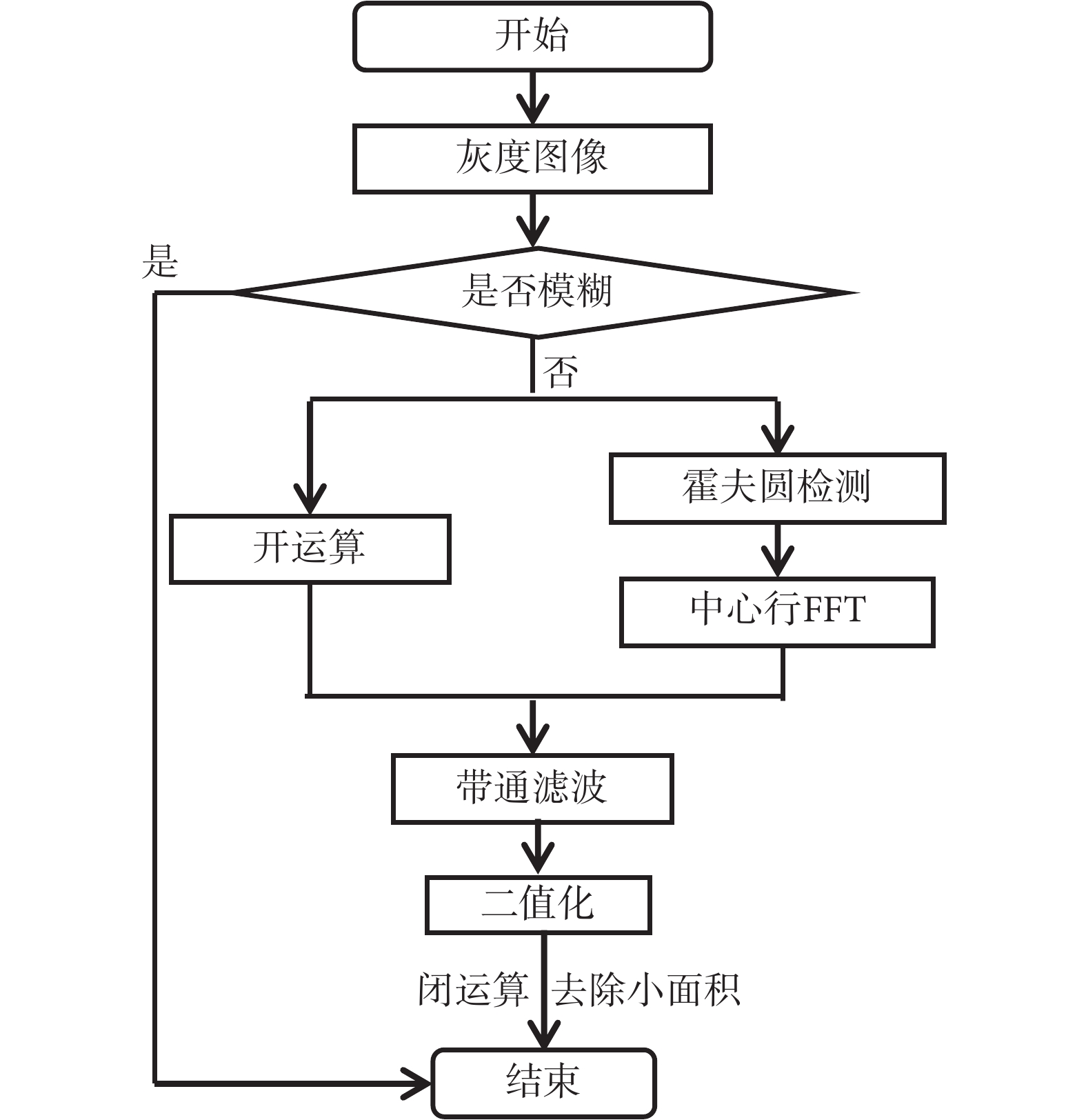
本文的預處理算法主要分為三個步驟:圖像模糊檢測、形態學處理和帶通濾波。預處理算法流程圖如圖 1 所示。其中,中心行灰度分布的快速傅里葉變換(fast fourier transform,FFT)簡稱為“中心行 FFT”。
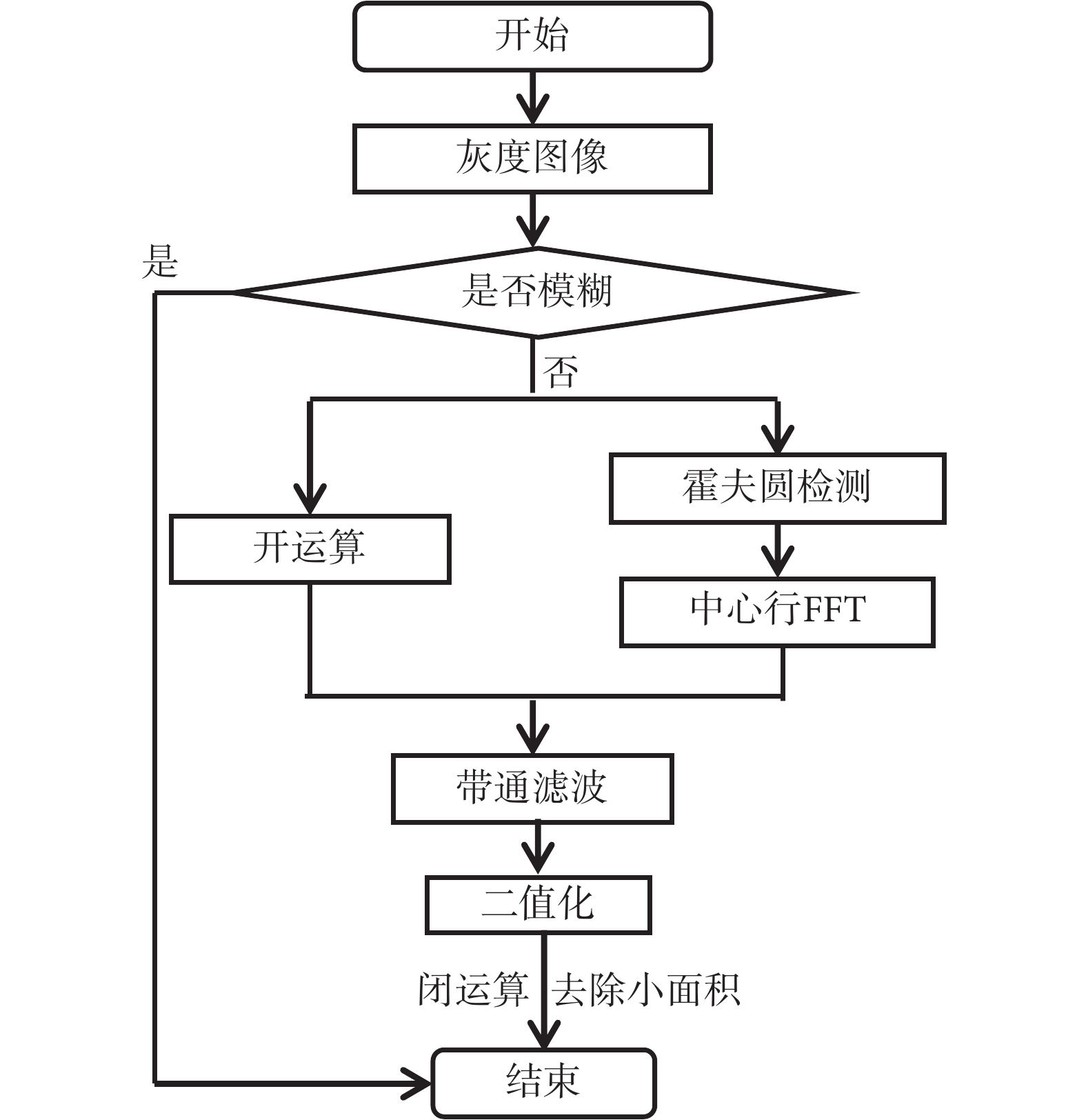 圖1
預處理算法流程圖
Figure1.
Flow diagram of pretreatment algorithm
圖1
預處理算法流程圖
Figure1.
Flow diagram of pretreatment algorithm
2.1 模糊檢測
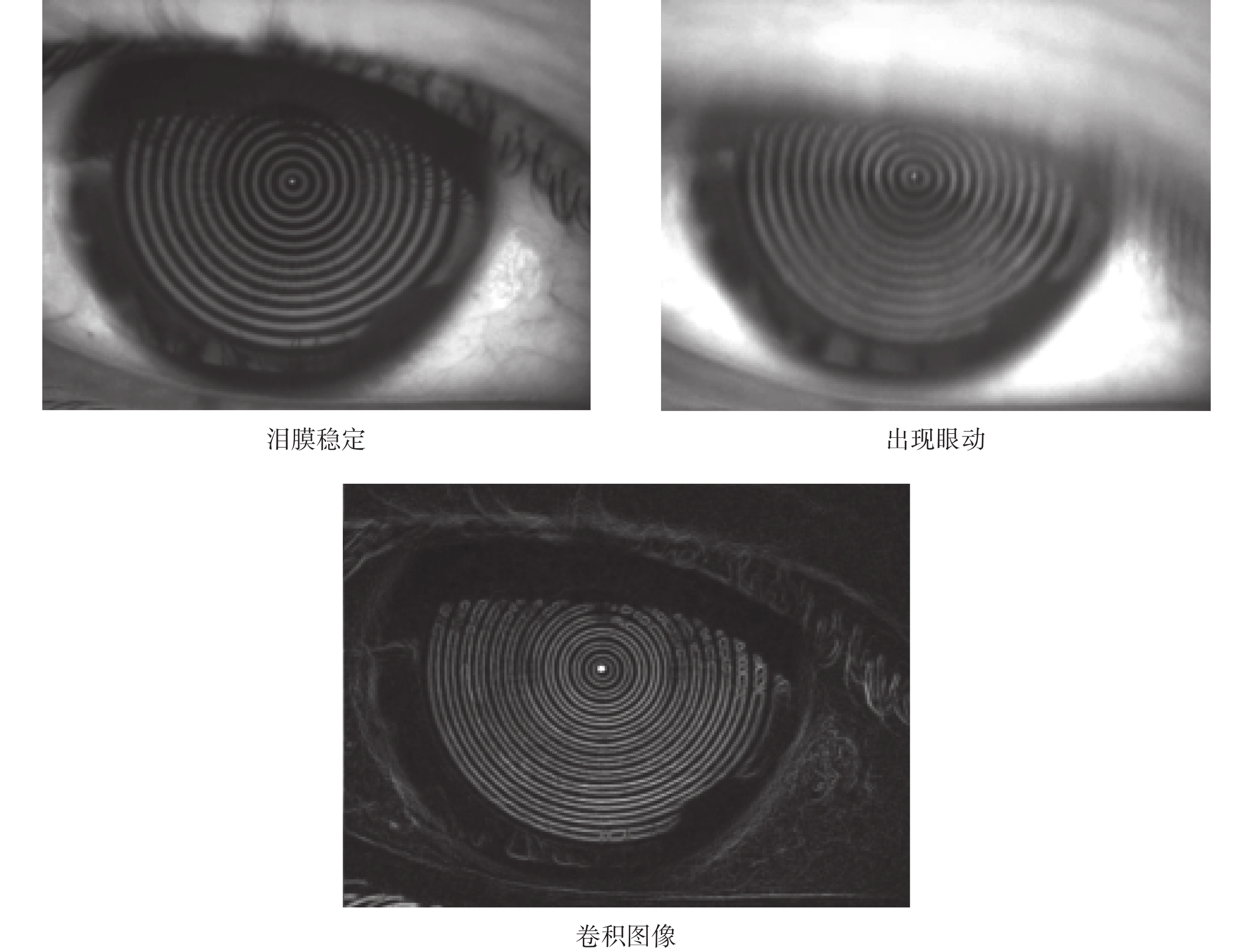
正常情況下,人一般每 5 秒眨眼一次[11]。如果在圖像采集時出現眼動,往往會造成圖像模糊失真,如圖 2 子圖“出現眼動”所示,這一部分圖像對淚膜穩定性的研究沒有價值,需要從視頻序列中剔除。
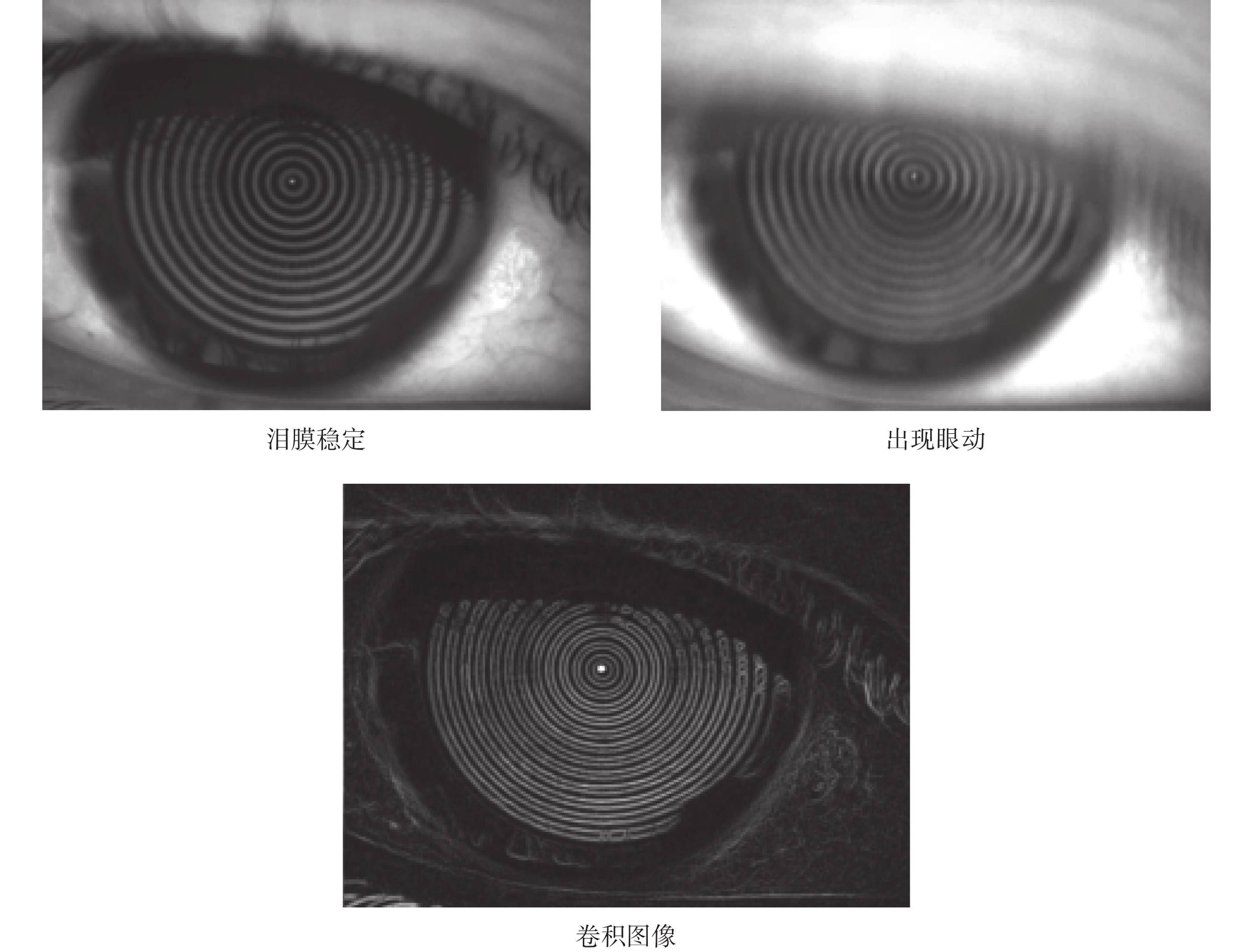 圖2
角膜圖像
Figure2.
Cornea images
圖2
角膜圖像
Figure2.
Cornea images
現有的檢測算法對自然圖像的模糊評價已經比較成熟[17-19],但作為結構光成像的非自然圖像,淚膜圖像本身就存在著灰度分布不均勻等特點。綜合考慮算法復雜度并結合淚膜圖像特征,本部分采用 Sobel 算子進行模糊檢測。
Sobel 算子邊緣檢測算法比較簡單,廣泛應用于醫學圖像處理[20]。淚膜穩定和出現眼動時的角膜圖像分別如圖 2 上方兩幅子圖所示。矩陣 I 代表角膜圖像,大小為 M × N。矩陣 Sh 代表水平方向算子,矩陣 Sv 代表豎直方向算子,大小均為 3 × 3,如式(1)、(2)所示。首先將矩陣 Sh 和 Sv 與矩陣 I 卷積得到矩陣 C,該矩陣代表卷積圖像,如圖 2 下方子圖所示;然后再將 MATLAB R2013a(8.1)(MathWorks Inc.,美國)中的邊緣檢測函數應用于角膜圖像 I(其中算子類型為 Canny 算子)后可以得到邊緣圖像,利用矩陣 E 表示。Canny 算子具有低錯誤率、定位最優以及單像素的特點,增加了邊緣檢測的可靠性,提高了后續環狀圖樣邊緣中心計算的準確率。
 |
 |
圖像的模糊程度與邊緣數目呈現負相關。對于淚膜圖像,中央環狀圖樣相比邊緣區域包含了更多有意義的信息,因此本部分提出一種距離加權的邊緣強度法來評價圖像模糊,主要分為以下兩個步驟:
(1)邊緣像素中心計算;為了減小計算量,此處僅計算了水平方向的邊緣像素中心。邊緣圖像 E 中所有邊緣像素點的列索引的平均值即為邊緣像素中心 xcenter。
(2)距離加權模糊指數計算;首先計算出卷積圖像 C 中邊緣像素與中心 xcenter 的距離。由于有用的環狀圖樣信息多在中央,而睫毛等其他干擾多在外圍,利用距離作為卷積圖像 C 邊緣強度的權重,距離加權邊緣強度總和的倒數即為角膜圖像的模糊指數,其值越大,淚膜圖像的模糊程度越高。
進行眼部成像時,眼球的生理狀況差異可能會給圖像帶來不同程度的干擾。如圖 2 子圖“淚膜穩定”中右邊眼白部分的亮斑和血絲。邊緣檢測后,由于考慮了所有邊緣像素點的統計特性,亮斑和微弱的血絲干擾對環狀圖樣中心計算的影響很小。個別嚴重的局部血絲可能會導致最終的模糊指數出現一定偏差,但不影響整個視頻序列中模糊圖像的剔除。
通過上述算法,圖 2 上方兩幅子圖的模糊指數分別為 0.086、0.396,與主觀感知結果一致。
2.2 形態學處理
經過前述的模糊檢測將模糊圖像排除后,需要進一步去除圖像中睫毛和背景的影響。
對一個圖像先腐蝕再膨脹的操作稱為開運算,它可以起到消除細小的物體、在纖細點處分離物體、平滑較大物體的邊界時不明顯改變其面積的作用。開運算的數學表示如式(3)所示:
 |
其中,矩陣 Io 表示開運算圖像,集合 So 代表結構元素, 和
和 分別表示腐蝕操作運算符和膨脹操作運算符。
分別表示腐蝕操作運算符和膨脹操作運算符。
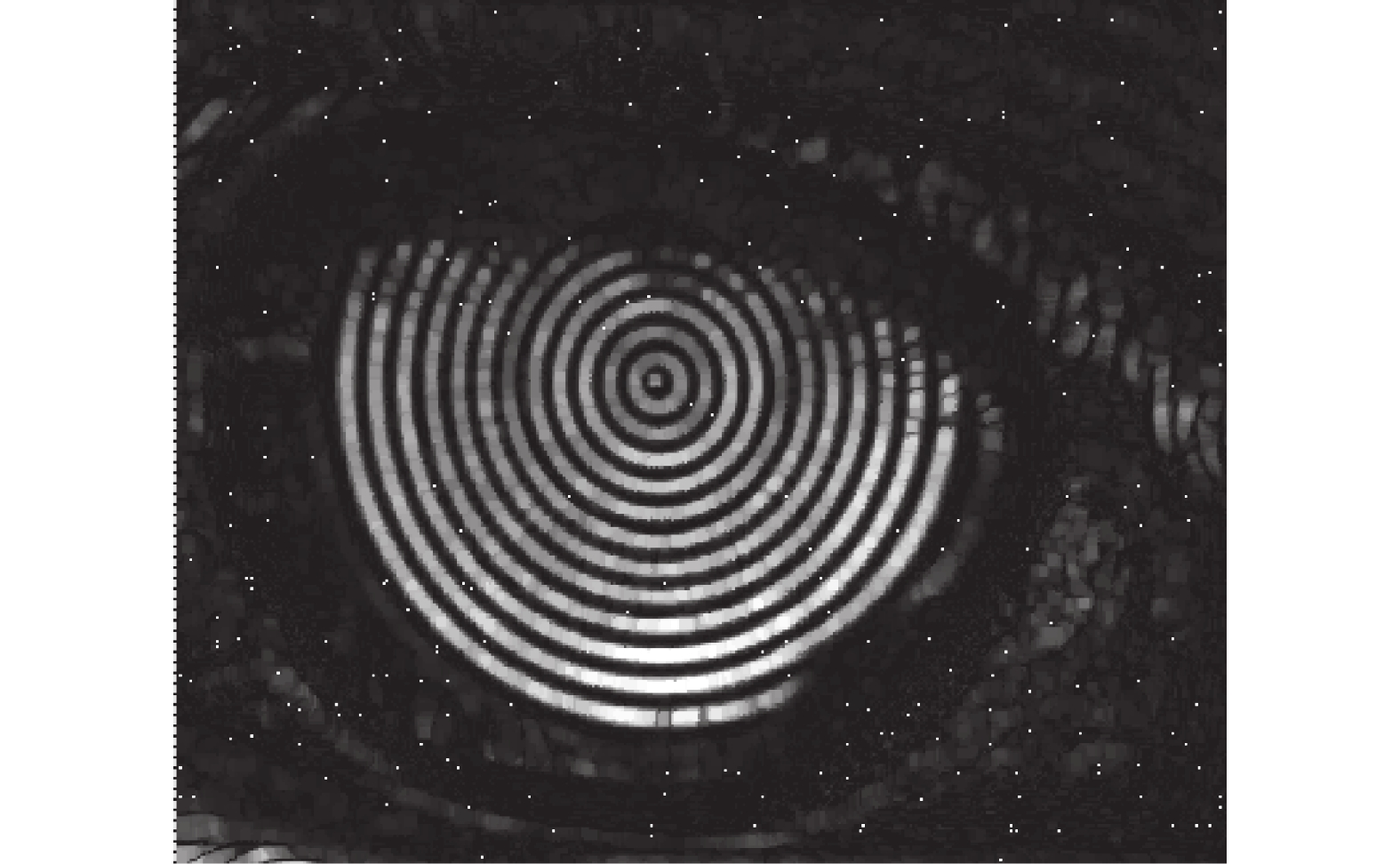
選擇兩個半徑分別為 9 像素和 3 像素的圓盤結構元素,表示為集合 Soa、Soc,利用 Soa、Soc 對矩陣 I 各進行一次開運算得到矩陣 Ioa、Ioc,然后再將 Ioa 和 Ioc 相減后得到矩陣 T,該矩陣代表背景和睫毛干擾減弱且環狀圖樣突出的目標圖像。圖 2 中“淚膜穩定”子圖的形態學處理結果如圖 3 所示。
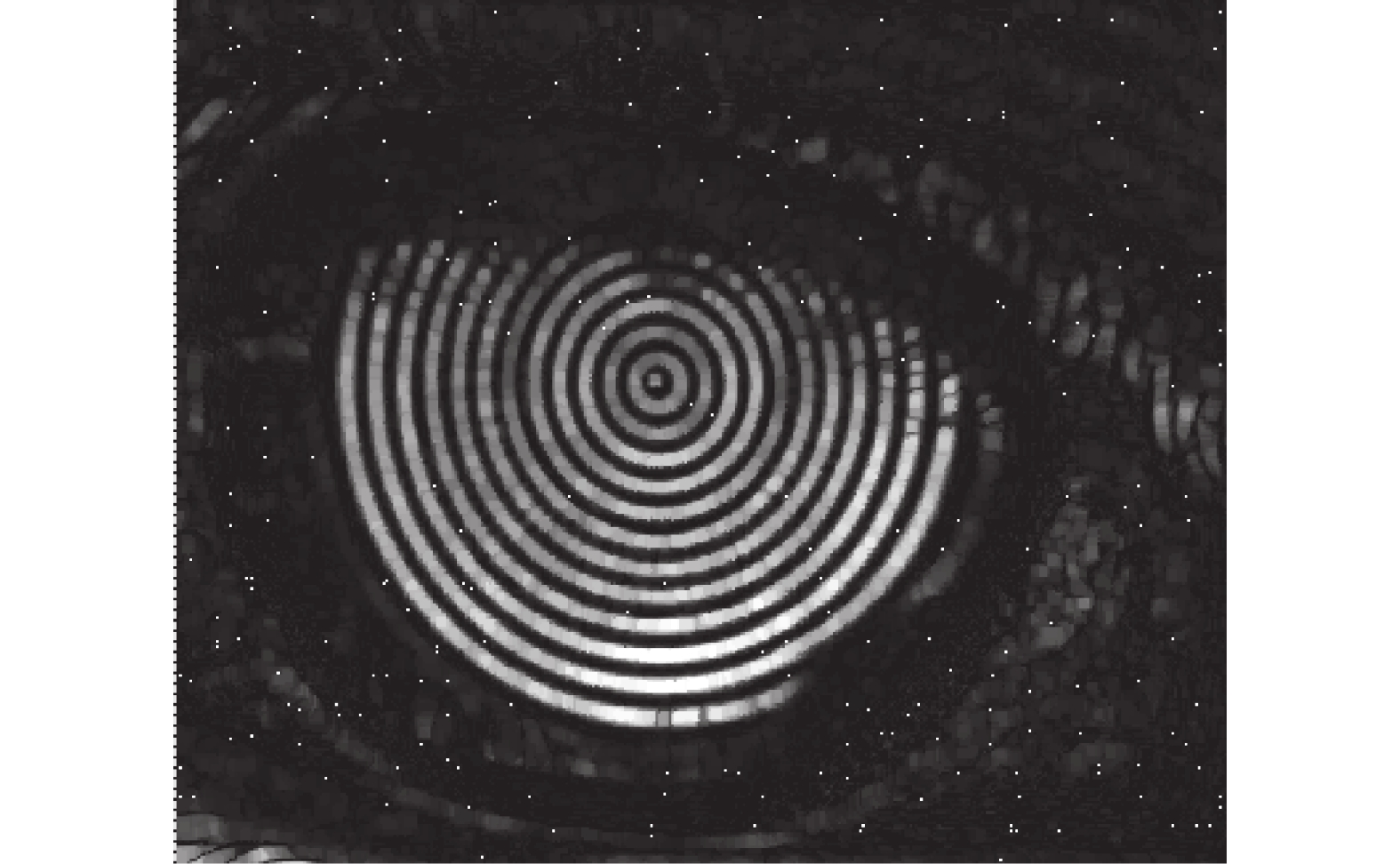 圖3
目標圖像
Figure3.
Target image
圖3
目標圖像
Figure3.
Target image
2.3 帶通濾波
觀察如圖 3 所示的目標圖像 T 可知,相對變化緩慢的背景干擾和變化劇烈的睫毛干擾,環狀信息具非常明顯的周期性,通過帶通濾波可以將其對應的分量提取出來。
為了確定環狀圖樣的頻率分量,選取目標圖像 T 同心環中心所在行進行 FFT,因此首先需要檢測中心。
標準的淚膜圖像基本都滿足良好的居中條件,劃定灰度圖像的中央子圖,通過霍夫圓變換即可確定同心環中心。再對目標圖像 T 的中心行進行 FFT,其中環狀圖樣頻率 f 對應于頻譜圖峰值所在位置。設置頻率下限 f 1 以去除背景的干擾,設置頻率上限 f 2 以防止噪聲的影響,根據實際處理效果,f 1 和 f 2 被確定為如式(4)、(5)所示:
 |
 |
最后,將巴特沃斯帶通濾波應用于目標圖像 T,進一步減弱圖像中睫毛和背景的干擾。
3 模糊檢測與環狀圖樣定位實驗
3.1 模糊檢測
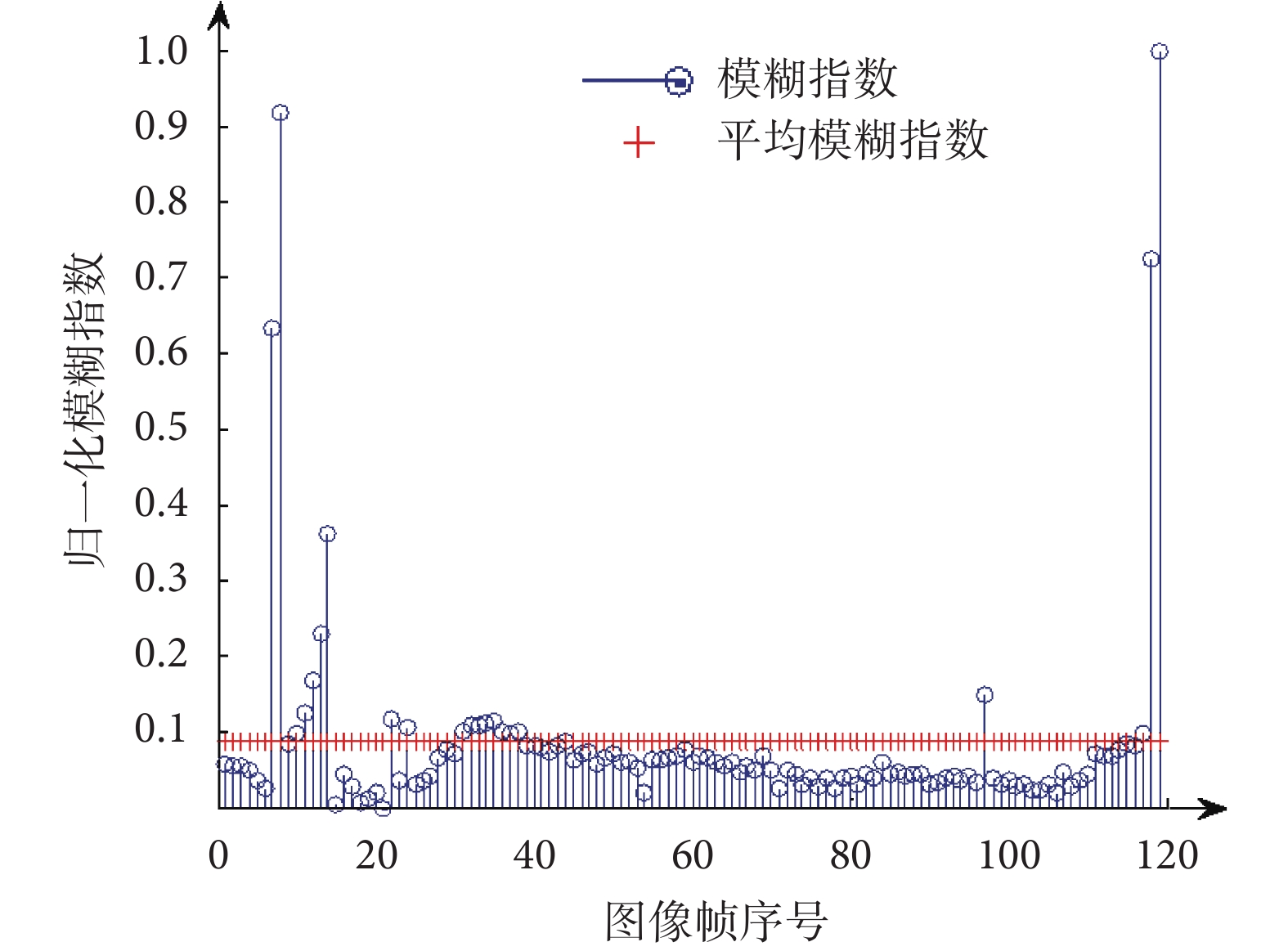
從前述角膜分析儀數據庫中隨機取出 10 段視頻,視頻編號為 1~10,首先選取視頻 1 進行模糊檢測,并將模糊指數歸一化到 0~1,檢測結果如圖 4 所示。
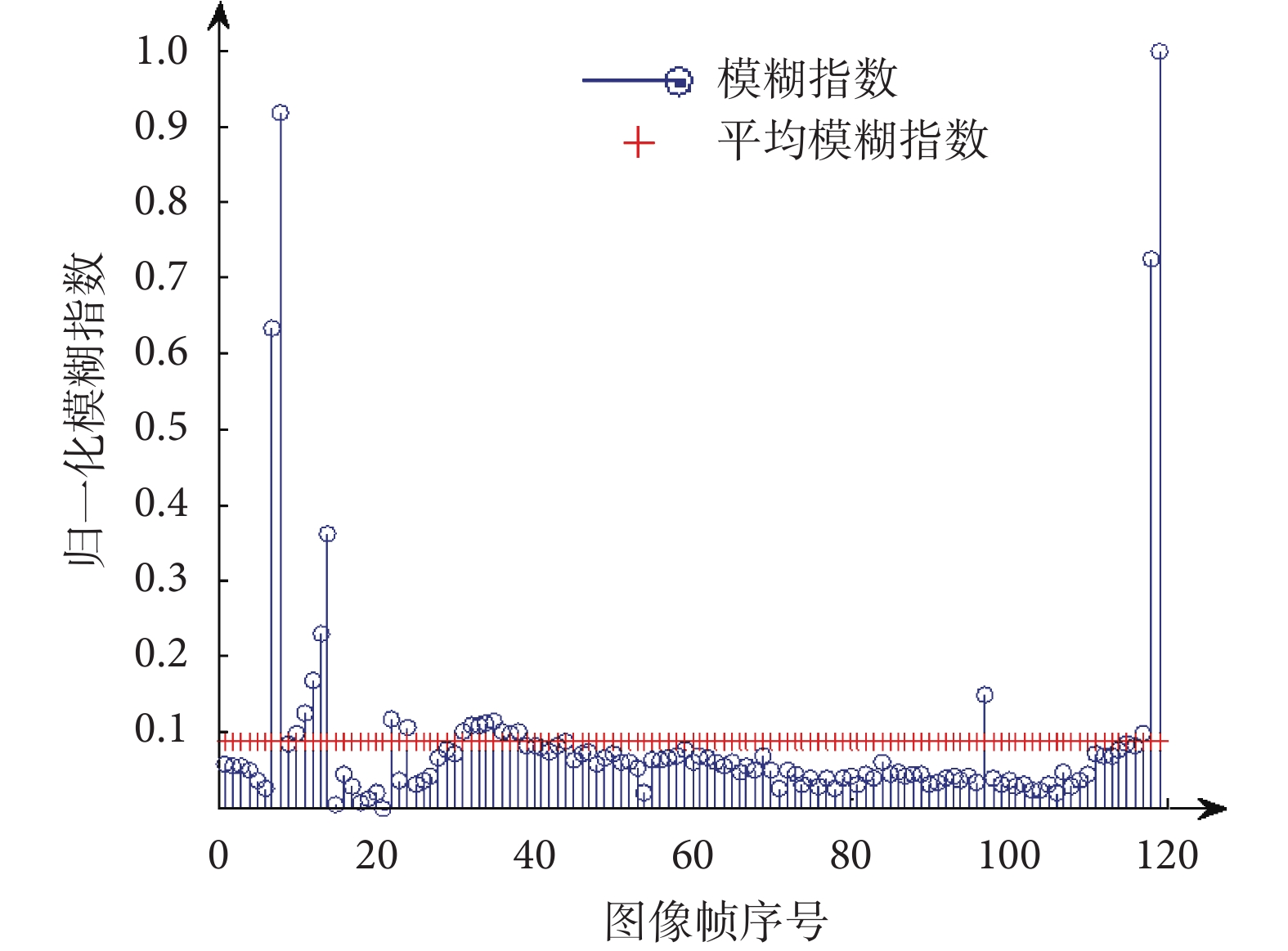 圖4
歸一化模糊指數
Figure4.
Normalized blur index
圖4
歸一化模糊指數
Figure4.
Normalized blur index
由圖 4 中的數據可知,模糊指數在平均水平以上的位置代表眼動引起了模糊失真,峰值突出的位置對應于眨眼時刻。
如果視頻序列中的某一幀是模糊圖像,那么該幀前后很大程度上也會出現模糊[12],常見的處理方法為去除包含模糊幀在內的連續 3 幀圖像。接著對視頻 2~10 進行處理,結果如表 1 第 4 列數據所示。觀察表 1 可以看出,本文選取的 10 段視頻共有 861 幀圖像,距離加權的 Sobel 算子邊緣強度法一共判定出 157 幀模糊圖像,去除了環狀圖樣信息不足的模糊干擾。
3.2 環狀圖樣區域定位
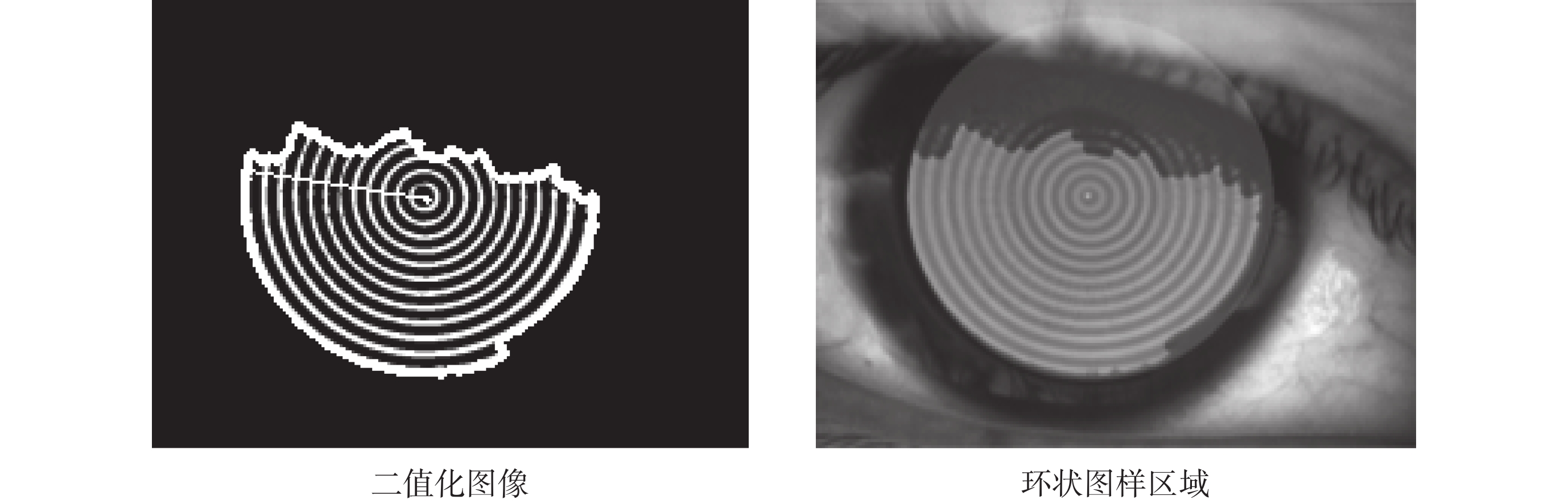
通過全局大津法對帶通濾波圖像進行二值化操作,再去除面積小于 100 的連通域后得到如圖 5 所示的二值化圖像,表示為矩陣 B。
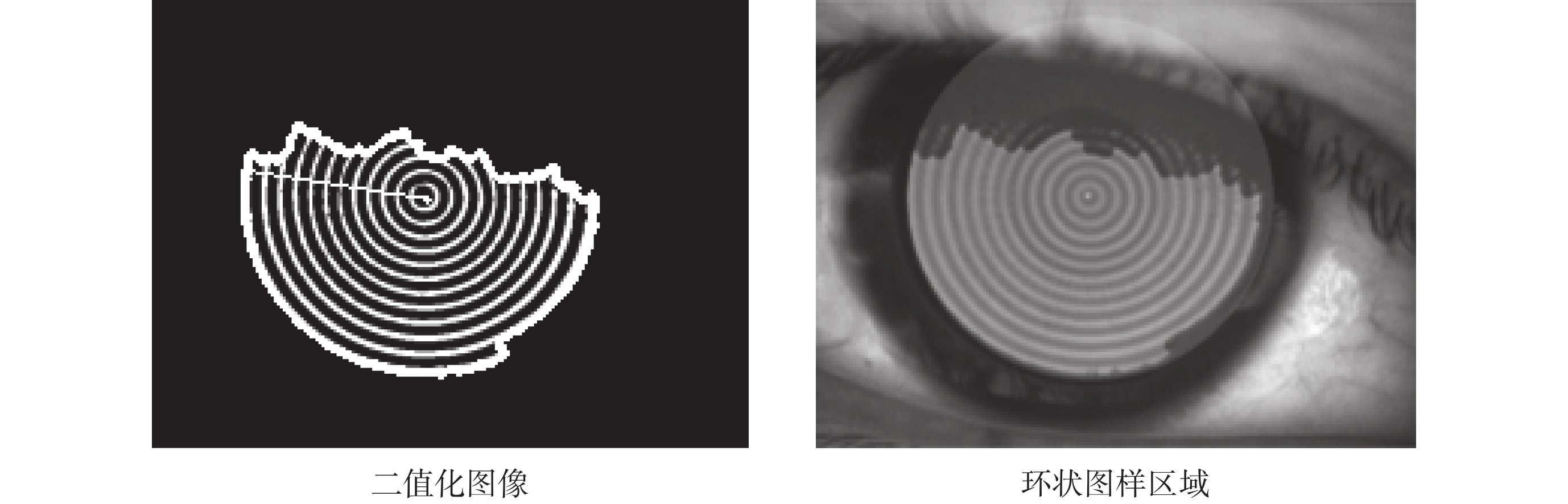 圖5
環狀圖樣定位結果
Figure5.
Ring patter localization result
圖5
環狀圖樣定位結果
Figure5.
Ring patter localization result
閉運算是先膨脹再腐蝕的形態學處理操作,用于去掉目標內的孔,平滑對象的輪廓[21]。與開運算不同的是閉運算一般會將狹窄的缺口連接起來形成細長的彎口,并填充比結構元素小的洞。
選擇半徑為 9 的圓盤結構元素對二值化圖像 B 進行閉運算操作,再對所得閉運算圖像尋找最大外輪廓,處理結果如圖 5 所示,子圖“二值化圖像”中的中央星型標記為環狀圖樣同心環中心,使用點集 Co 表示,白色直線段則代表該輪廓的最大半徑 r。
以 Co 為圓心,r 為半徑做圓,可以確定角膜圖像的環狀圖樣區域,表示為集合 A,如圖 5 右側子圖所示的淺透明圓形區域,環狀圖樣區域 A 的定位結果參考表 1 第 5 列數據。再將閉運算圖像中的白色區域映射到角膜圖像后得到如圖 5 右側子圖所示的深透明不規則區域。
3.3 實驗結果分析
如表 1 所示,本文的預處理算法對淚膜視頻 1~10 中 98% 以上的圖像均適用。個別圖像的環狀圖樣區域 A 定位失敗。經分析,原因主要有以下兩點:
(1)模糊檢測失效,即模糊圖像沒有被識別出來。對于環狀信息嚴重缺失的圖像,霍夫圓變換無法找到同心環中心。
(2)角膜表面粘液反射。角膜表面分布的粘液反射出白色亮斑,與環狀圖樣邊緣黏接在一起,形態學開閉運算皆無法消除,導致檢測出的區域 A 過大。
4 結論
圍繞淚膜視頻中的眼動、睫毛和背景干擾,本文提出了一種相應的預處理算法,并將其運用于真實的淚膜視頻。由于邊緣加權模糊檢測方法簡單易行,能夠將模糊圖像從淚膜視頻中識別出來,形態學結合帶通濾波操作減弱了背景和睫毛的干擾,增強了有用的環狀圖樣信息,最終實現了模糊圖像的檢測和環狀圖樣區域的定位,繼而也為后續的環狀圖樣變形分析提供了條件。
本文提出的算法基本完成了淚膜視頻的預處理,但需要在以下幾個方面進行改進:
(1)預處理算法中,模糊圖像檢測將個別環狀圖樣信息豐富但對比度較低的圖像判斷為模糊,使得有用信息減少,需要設計準確度更高的模糊檢測算法。
(2)淚膜視頻中,隨著時間的推移,淚膜質量下降,中心行灰度分布周期性會下降。曲線擬合中心以及多個方向分析環狀圖樣的頻率可以增加環狀圖樣區域定位的穩定性。
模糊檢測中,增加特征參數后可以提高檢測準確率,但復雜度也必然隨之增加,因此需要做進一步研究。本文實驗部分通過 10 段視頻進行驗證,未來可以通過大樣本訓練集提取淚膜圖像的特征向量來進行環狀圖樣的變形分析,進而為干眼的臨床診斷提供一定依據。
利益沖突聲明:本文全體作者均聲明不存在利益沖突。
引言
角膜地形圖是一種常見的眼科診斷技術,常用于確定屈光度、淚膜穩定性等眼表疾病參數,其中淚膜穩定性是臨床上診斷干眼的關鍵標志[1-2]。角膜地形圖評估淚膜穩定性的原理是普拉西多盤(Placido disk)結構光成像[2-3],即通過環狀結構光從角膜前表面反射,再經過光學系統,最終成像于電荷耦合元件等光學傳感器。
角膜地形圖圖像采集過程中往往會受到眼睛運動、眼瞼狹窄、睫毛濃長以及眼球震顫等不良條件的干擾和影響[4-5]。比如說,眼睛運動(簡稱:眼動)雖然對靜態采集單張圖像影響很小,但在角膜視頻的動態拍攝中,即便是微弱的眼動,也會引起測量期間眼坐標的移動[6-7],瞬目反射或幅度大的眼球運動往往會導致個別圖像出現模糊,甚至失去大部分環狀信息,如果再加上背景和睫毛的干擾,將會嚴重影響后續淚膜圖像處理中有效信息的提取和匹配[8]。
淚膜視頻預處理目的在于去除無效圖像以及定位環狀圖樣。現有的淚膜穩定性研究中[4-14],針對淚膜視頻的預處理尚存在一些問題。比如,Schack 等[9]和 Morelande 等[10]分別擬合眼瞼位置和角膜邊緣確定坐標參考點,但是擬合和迭代增加了預處理工作的復雜度,且得到的結果中仍然存在睫毛干擾信息。Iskander 等[11]利用澤日尼克多項式擬合高度表面殘差的平方根,雖然降低了對眼動和視軸的依賴性,但只適合瞬目后淚膜的形成過程,無法觀察后續的淚膜穩定性狀況。Alonso-Caneiro 等[12]通過角膜圖像中心下方 200 × 75 的長方形區域八鄰域的平均一致性來檢測圖像模糊,然而這種方法并不穩定,因為眼動引起的模糊是隨機而不均勻的。隋成華等[13]采用索貝爾算子(Sobel operator)與坎尼算子(Canny operator)相結合的方法進行圖像檢測,但是這種方法主要是依據灰度值確定 8 張初選圖像中最清晰的一張,容易受到光照不均的影響。基于 Iskander 等[11]的方法,Downie 等[14]從原始圖像數據計算淚膜質量的局部特征,卻仍然存在模糊檢測和環心定位等問題。
感興趣區域的定位,例如肝臟分割,是醫療圖像分析中最基本的步驟[15-16]。對于自然器官,模型法已經基本實現了精準而穩定的分割,但基于統計模型和基于水平集的方法并不適合角膜地形圖預處理。與肝臟或者肺部圖像存在自然邊緣不同,角膜圖像屬于結構光成像,主要是由規則的明暗相間的圓環組成,再加上淚膜動態變化的隨機性以及睫毛分布的特異性,不存在形狀模型和圖譜分割的概念。
鑒于以上問題,且依據淚膜圖像的固有特點,本文首先通過 Sobel 算子檢測圖像的模糊程度,剔除模糊圖像后,再運用形態學運算和帶通濾波去除睫毛和背景帶來的干擾,最終實現了環狀圖樣區域的定位。綜上所述,本文提出的淚膜視頻預處理算法,利用全局圖像信息,簡單有效,無需迭代,且不受光照均勻度的影響,適用于真實淚膜圖像的預處理。
1 數據來源
本文使用的所有淚膜視頻均由廈門大學眼科研究所提供,利用三維全自動角膜分析儀(SIRIUS-antares,Costruzione Strumenti Oftalmici Inc.,意大利)進行圖像采集。受試者選取年齡在 21~51 歲之間的 10 名志愿者(5 男、5 女)作為研究對象,受試者均無隱形眼鏡佩戴史。相同的條件下,由同一位眼科醫師對每位受試者進行 3 次淚膜視頻的拍攝,每次拍攝之間休息放松 5 min,所有受試者均已簽署知情同意書。本課題組獲得廈門大學眼科研究所授權可使用以上數據,研究符合赫爾辛基宣言的相關倫理要求,且已經通過廈門大學醫學院倫理委員會的審查。
圖像的處理分析在仿真軟件 MATLAB R2013a(8.1)(MathWorks Inc.,美國)中進行。
2 預處理算法
本文的預處理算法主要分為三個步驟:圖像模糊檢測、形態學處理和帶通濾波。預處理算法流程圖如圖 1 所示。其中,中心行灰度分布的快速傅里葉變換(fast fourier transform,FFT)簡稱為“中心行 FFT”。
圖1
預處理算法流程圖
Figure1.
Flow diagram of pretreatment algorithm
2.1 模糊檢測
正常情況下,人一般每 5 秒眨眼一次[11]。如果在圖像采集時出現眼動,往往會造成圖像模糊失真,如圖 2 子圖“出現眼動”所示,這一部分圖像對淚膜穩定性的研究沒有價值,需要從視頻序列中剔除。
圖2
角膜圖像
Figure2.
Cornea images
現有的檢測算法對自然圖像的模糊評價已經比較成熟[17-19],但作為結構光成像的非自然圖像,淚膜圖像本身就存在著灰度分布不均勻等特點。綜合考慮算法復雜度并結合淚膜圖像特征,本部分采用 Sobel 算子進行模糊檢測。
Sobel 算子邊緣檢測算法比較簡單,廣泛應用于醫學圖像處理[20]。淚膜穩定和出現眼動時的角膜圖像分別如圖 2 上方兩幅子圖所示。矩陣 I 代表角膜圖像,大小為 M × N。矩陣 Sh 代表水平方向算子,矩陣 Sv 代表豎直方向算子,大小均為 3 × 3,如式(1)、(2)所示。首先將矩陣 Sh 和 Sv 與矩陣 I 卷積得到矩陣 C,該矩陣代表卷積圖像,如圖 2 下方子圖所示;然后再將 MATLAB R2013a(8.1)(MathWorks Inc.,美國)中的邊緣檢測函數應用于角膜圖像 I(其中算子類型為 Canny 算子)后可以得到邊緣圖像,利用矩陣 E 表示。Canny 算子具有低錯誤率、定位最優以及單像素的特點,增加了邊緣檢測的可靠性,提高了后續環狀圖樣邊緣中心計算的準確率。
|
|
圖像的模糊程度與邊緣數目呈現負相關。對于淚膜圖像,中央環狀圖樣相比邊緣區域包含了更多有意義的信息,因此本部分提出一種距離加權的邊緣強度法來評價圖像模糊,主要分為以下兩個步驟:
(1)邊緣像素中心計算;為了減小計算量,此處僅計算了水平方向的邊緣像素中心。邊緣圖像 E 中所有邊緣像素點的列索引的平均值即為邊緣像素中心 xcenter。
(2)距離加權模糊指數計算;首先計算出卷積圖像 C 中邊緣像素與中心 xcenter 的距離。由于有用的環狀圖樣信息多在中央,而睫毛等其他干擾多在外圍,利用距離作為卷積圖像 C 邊緣強度的權重,距離加權邊緣強度總和的倒數即為角膜圖像的模糊指數,其值越大,淚膜圖像的模糊程度越高。
進行眼部成像時,眼球的生理狀況差異可能會給圖像帶來不同程度的干擾。如圖 2 子圖“淚膜穩定”中右邊眼白部分的亮斑和血絲。邊緣檢測后,由于考慮了所有邊緣像素點的統計特性,亮斑和微弱的血絲干擾對環狀圖樣中心計算的影響很小。個別嚴重的局部血絲可能會導致最終的模糊指數出現一定偏差,但不影響整個視頻序列中模糊圖像的剔除。
通過上述算法,圖 2 上方兩幅子圖的模糊指數分別為 0.086、0.396,與主觀感知結果一致。
2.2 形態學處理
經過前述的模糊檢測將模糊圖像排除后,需要進一步去除圖像中睫毛和背景的影響。
對一個圖像先腐蝕再膨脹的操作稱為開運算,它可以起到消除細小的物體、在纖細點處分離物體、平滑較大物體的邊界時不明顯改變其面積的作用。開運算的數學表示如式(3)所示:
|
其中,矩陣 Io 表示開運算圖像,集合 So 代表結構元素,和分別表示腐蝕操作運算符和膨脹操作運算符。
選擇兩個半徑分別為 9 像素和 3 像素的圓盤結構元素,表示為集合 Soa、Soc,利用 Soa、Soc 對矩陣 I 各進行一次開運算得到矩陣 Ioa、Ioc,然后再將 Ioa 和 Ioc 相減后得到矩陣 T,該矩陣代表背景和睫毛干擾減弱且環狀圖樣突出的目標圖像。圖 2 中“淚膜穩定”子圖的形態學處理結果如圖 3 所示。
圖3
目標圖像
Figure3.
Target image
2.3 帶通濾波
觀察如圖 3 所示的目標圖像 T 可知,相對變化緩慢的背景干擾和變化劇烈的睫毛干擾,環狀信息具非常明顯的周期性,通過帶通濾波可以將其對應的分量提取出來。
為了確定環狀圖樣的頻率分量,選取目標圖像 T 同心環中心所在行進行 FFT,因此首先需要檢測中心。
標準的淚膜圖像基本都滿足良好的居中條件,劃定灰度圖像的中央子圖,通過霍夫圓變換即可確定同心環中心。再對目標圖像 T 的中心行進行 FFT,其中環狀圖樣頻率 f 對應于頻譜圖峰值所在位置。設置頻率下限 f 1 以去除背景的干擾,設置頻率上限 f 2 以防止噪聲的影響,根據實際處理效果,f 1 和 f 2 被確定為如式(4)、(5)所示:
|
|
最后,將巴特沃斯帶通濾波應用于目標圖像 T,進一步減弱圖像中睫毛和背景的干擾。
3 模糊檢測與環狀圖樣定位實驗
3.1 模糊檢測
從前述角膜分析儀數據庫中隨機取出 10 段視頻,視頻編號為 1~10,首先選取視頻 1 進行模糊檢測,并將模糊指數歸一化到 0~1,檢測結果如圖 4 所示。
圖4
歸一化模糊指數
Figure4.
Normalized blur index
由圖 4 中的數據可知,模糊指數在平均水平以上的位置代表眼動引起了模糊失真,峰值突出的位置對應于眨眼時刻。
如果視頻序列中的某一幀是模糊圖像,那么該幀前后很大程度上也會出現模糊[12],常見的處理方法為去除包含模糊幀在內的連續 3 幀圖像。接著對視頻 2~10 進行處理,結果如表 1 第 4 列數據所示。觀察表 1 可以看出,本文選取的 10 段視頻共有 861 幀圖像,距離加權的 Sobel 算子邊緣強度法一共判定出 157 幀模糊圖像,去除了環狀圖樣信息不足的模糊干擾。
3.2 環狀圖樣區域定位
通過全局大津法對帶通濾波圖像進行二值化操作,再去除面積小于 100 的連通域后得到如圖 5 所示的二值化圖像,表示為矩陣 B。
圖5
環狀圖樣定位結果
Figure5.
Ring patter localization result
閉運算是先膨脹再腐蝕的形態學處理操作,用于去掉目標內的孔,平滑對象的輪廓[21]。與開運算不同的是閉運算一般會將狹窄的缺口連接起來形成細長的彎口,并填充比結構元素小的洞。
選擇半徑為 9 的圓盤結構元素對二值化圖像 B 進行閉運算操作,再對所得閉運算圖像尋找最大外輪廓,處理結果如圖 5 所示,子圖“二值化圖像”中的中央星型標記為環狀圖樣同心環中心,使用點集 Co 表示,白色直線段則代表該輪廓的最大半徑 r。
以 Co 為圓心,r 為半徑做圓,可以確定角膜圖像的環狀圖樣區域,表示為集合 A,如圖 5 右側子圖所示的淺透明圓形區域,環狀圖樣區域 A 的定位結果參考表 1 第 5 列數據。再將閉運算圖像中的白色區域映射到角膜圖像后得到如圖 5 右側子圖所示的深透明不規則區域。
3.3 實驗結果分析
如表 1 所示,本文的預處理算法對淚膜視頻 1~10 中 98% 以上的圖像均適用。個別圖像的環狀圖樣區域 A 定位失敗。經分析,原因主要有以下兩點:
(1)模糊檢測失效,即模糊圖像沒有被識別出來。對于環狀信息嚴重缺失的圖像,霍夫圓變換無法找到同心環中心。
(2)角膜表面粘液反射。角膜表面分布的粘液反射出白色亮斑,與環狀圖樣邊緣黏接在一起,形態學開閉運算皆無法消除,導致檢測出的區域 A 過大。
4 結論
圍繞淚膜視頻中的眼動、睫毛和背景干擾,本文提出了一種相應的預處理算法,并將其運用于真實的淚膜視頻。由于邊緣加權模糊檢測方法簡單易行,能夠將模糊圖像從淚膜視頻中識別出來,形態學結合帶通濾波操作減弱了背景和睫毛的干擾,增強了有用的環狀圖樣信息,最終實現了模糊圖像的檢測和環狀圖樣區域的定位,繼而也為后續的環狀圖樣變形分析提供了條件。
本文提出的算法基本完成了淚膜視頻的預處理,但需要在以下幾個方面進行改進:
(1)預處理算法中,模糊圖像檢測將個別環狀圖樣信息豐富但對比度較低的圖像判斷為模糊,使得有用信息減少,需要設計準確度更高的模糊檢測算法。
(2)淚膜視頻中,隨著時間的推移,淚膜質量下降,中心行灰度分布周期性會下降。曲線擬合中心以及多個方向分析環狀圖樣的頻率可以增加環狀圖樣區域定位的穩定性。
模糊檢測中,增加特征參數后可以提高檢測準確率,但復雜度也必然隨之增加,因此需要做進一步研究。本文實驗部分通過 10 段視頻進行驗證,未來可以通過大樣本訓練集提取淚膜圖像的特征向量來進行環狀圖樣的變形分析,進而為干眼的臨床診斷提供一定依據。
利益沖突聲明:本文全體作者均聲明不存在利益沖突。