仰臥位側翻是預防長期臥床患者發生壓瘡的有效措施之一,對其進行動力學研究具有重要意義。基于解剖學理論,建立人體的動力學模型并進行平躺姿態、屈單膝姿態和側抬單側上下肢姿態三種常見仰臥位側翻姿態的動力學仿真,得到三種姿態下側翻時以胸部力、腰部力和大腿力為代表的驅動力的變化情況。為驗證仿真的有效性,進行人體仰臥位側翻的肌電力測量實驗,得到與仿真胸部、腰部和大腿位置接近的胸大肌、腹外斜肌和大腿肌的肌電測量值。實驗結果顯示實驗數據和仿真數據在范圍和變化趨勢方面一致。面向仰臥位側翻的動力學仿真及實驗研究結果,綜合評價了三種姿態下的仰臥位側翻運動中各個肌肉力的變化,對于人體側翻運動機制的研究具有重要的意義。
引用本文: 盧達, 蘇鵬, 季潤, 李宏亮, 郝育新, 樊瑜波. 人體仰臥位側翻的動力學仿真及實驗驗證. 生物醫學工程學雜志, 2019, 36(5): 777-784. doi: 10.7507/1001-5515.201809030 復制
版權信息: ?四川大學華西醫院華西期刊社《生物醫學工程學雜志》版權所有,未經授權不得轉載、改編
引言
近年來,我國的人口老齡化現象日益嚴重,在 2015 年,65 歲及以上人口近 1.5 億人,且在近十年呈上升趨勢。老年人的疾病大多數是慢性疾病,其特點是治療周期長,治療效果不明顯,社區服務中心收治的對象 90% 是久臥患者[1]。對于長期臥床者或癱瘓老人來說,臥床導致長時間的靜態載荷,阻塞血液供應,容易引發壓瘡(又名褥瘡),給患者帶來很大的痛苦,是目前臨床中造成最大經濟損失的病癥之一。預防壓瘡要做到定時側翻,一般情況下每兩小時側翻一次,必要時每一小時側翻一次。很多久臥患者沒有自己的行為意識,側翻動作主要依靠護理人員協助完成。當前輔助側翻設備多為翻身床、翻身床單和翻身枕等,這些設備需要人工輔助實現功能,且在使用時沒有考慮到人體工學,易給患者身體帶來不適感,因此研發使用方便、舒適、機構靈巧、可靠的輔助側翻機器人,具有巨大的社會需求。
為使輔助側翻機器人與人體自然的側翻動作相吻合,首先要明確人體側翻的運動機制。在現有人體運動的研究中,很多研究探討了人行走、蹲起的運動學、動力學,Hingtgent 等[2]建立了一個上肢的運動學模型,用來分析偏癱患者在上肢觸物運動過程中的最大角加速度及其出現時間,并與正常上肢運動相比較,通過準確量化運動過程,輔助康復治療。Tang 等[3]建立了人體骨肌系統生物力學模型及相關的實驗和計算方法,并對人體下肢運動學、動力學和肌肉激活度進行了計算與分析。Hemmerich 等[4]對 30 名健康的印度志愿者進行了日常大活動范圍髖、膝、踝關節的運動學測量,為設計適合非西方患者的假體提供基礎。Riener 等[5]進行了實驗,對測試者在不同坡度的樓梯上下行走時下肢的運動學與動力學進行了分析。
國內也有很多研究者在探討人體運動特征。張燕等[6]利用 ADAMS 軟件仿真人體下肢在不同路況下行走的穩定性來驗證模型的正確性。徐中華等[7]建立二連桿機構進行動力學仿真,測量出仿真模型在行走時的關節角度和力矩,與正常人體下肢受力對比,證明了仿真模型的有效性。董玉紅等[8]為幫助單側肢體運動障礙的患者進行下肢康復訓練,對人體下肢屈伸運動進行了動力學建模與仿真,仿真結果為下肢康復訓練器械的設計提供了參考。但是,目前關于人體仰臥位側翻的人體動力學的研究還很少。
本文擬面向仰臥位側翻動作研究,利用 ADAMS 軟件進行人體仰臥位側翻的動力學仿真,分析側翻過程中的胸部、腰部和腿部關節力和人體模型質心位置變化。然后,通過肌電圖(electromyogram,EMG)測量實驗者仰臥位側翻過程的肌電值,并與仿真模型同部位的力的變化圖進行對比,通過對人體仰臥位側翻動作機制的研究,可以為側翻機器人的設計提供思路,有助于降低壓瘡的發生率,同時所建模型可為后期機器人輔助側翻效果的仿真驗證奠定基礎。
1 面向仰臥位側翻的人體動力學建模
從解剖學角度分析,人體骨肌系統是由骨、骨連接和骨骼肌組成,成人骨肌約占體重的 60%,全身骨節關節連成骨骼,構成堅硬的人體支架。在運動中,骨起杠桿作用,關節是運動的樞紐,骨骼肌是運動的動力器官。綜合分析各個肌肉的功能[9-13]以及仰臥位側翻的運動特征,各肌肉中與側翻運動較為相關的肌肉為背淺肌、胸上肢肌、肩肌和髖肌。
通過對人體仰臥位側翻運動的研究,認為左側翻與右側翻運動具有相似性,故論文只分析右側翻運動。假設常見的三種側翻動作分別為:平躺姿態下的右側翻運動,即人四肢平放于床上,身體向右側翻;屈單膝姿態下的右側翻運動,即人左膝關節彎曲約 60°,右腿和雙上臂保持平放姿態,身體向右側翻;側抬單側上下肢姿態下的右側翻運動,即左大腿與左小腿、左上臂與左前臂向上抬起約 30°,右臂和右腿保持平放姿態,身體向右側翻。
做仰臥位側翻動作時,可以將人體簡化為 15 個部分:頭部、頸部、主軀、左上臂、左前臂、左手、右上臂、右前臂、右手、左大腿、左小腿、左腳、右大腿、右小腿和右腳,其中各部分構成獨立剛體,并通過關節鉸連接。為了簡化人體復雜結構,作以下假定[14]:① 在每一個剛體中,骨骼和軟組織都被認為是剛體。② 軟組織變形對每一個剛體的機械特性影響不大。③ 忽略人體臥姿側翻過程中單個剛體系統內各關節微小變化。④ 忽略韌帶對各關節運動的影響。
三種姿態下右側翻運動中,人體的左肩關節向右內斂,帶動腰部向右側翻,同時人的臀部向上抬起并向右側翻,因初始姿態不同,部分約束的設置會有所不同,三種姿態人體模型的約束設置如表 1 所示[6]。
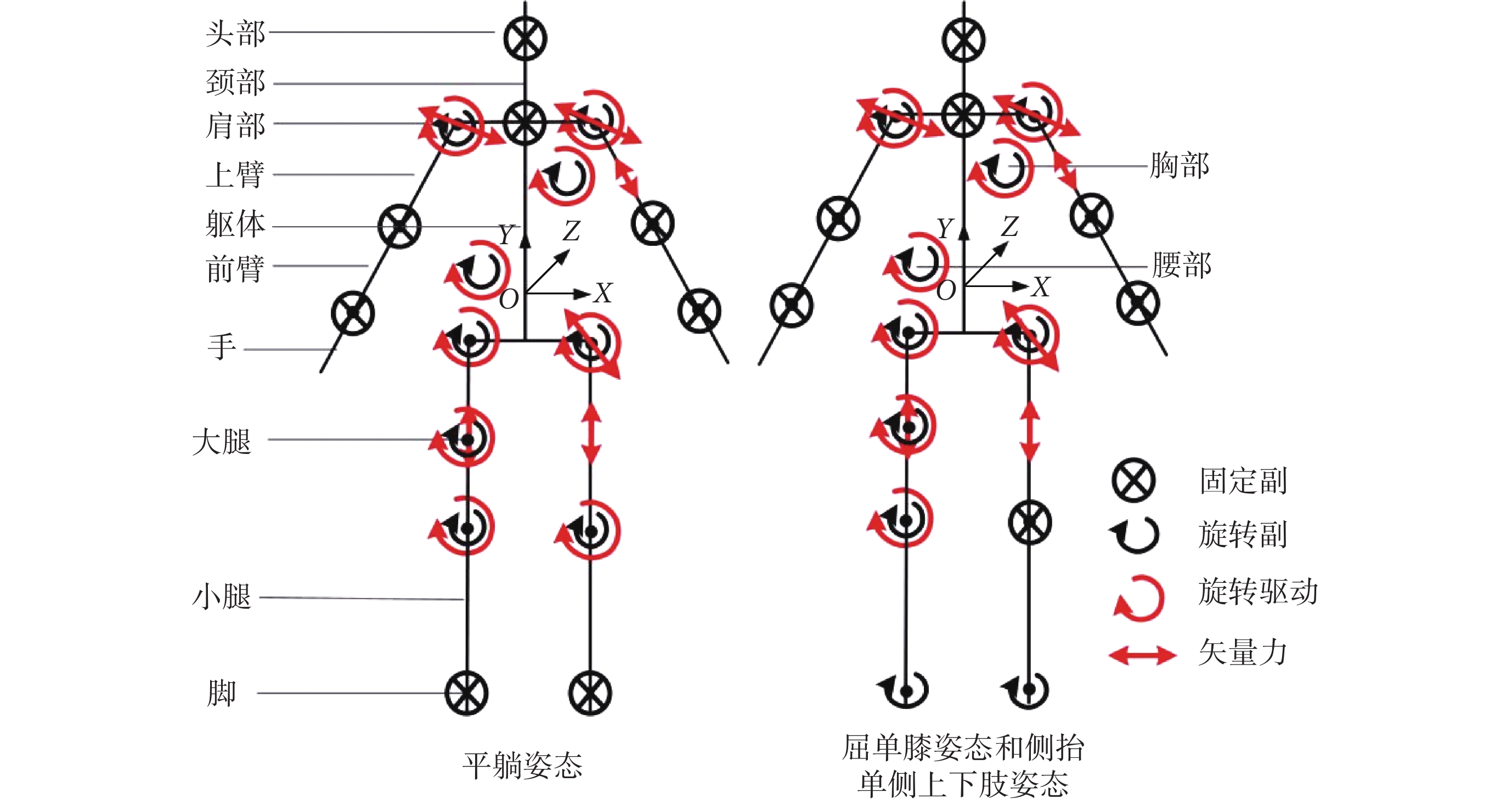
為了更直觀地表述各約束的設置,圖 1 給出了三種仰臥位側翻姿態的約束設置圖,并加入了矢量力來代表肌肉力[15]。選取笛卡爾坐標系,全局坐標系的原點 O 在人體模型的質心處,固定在軀干上不動,Z 軸垂直于地面向下。
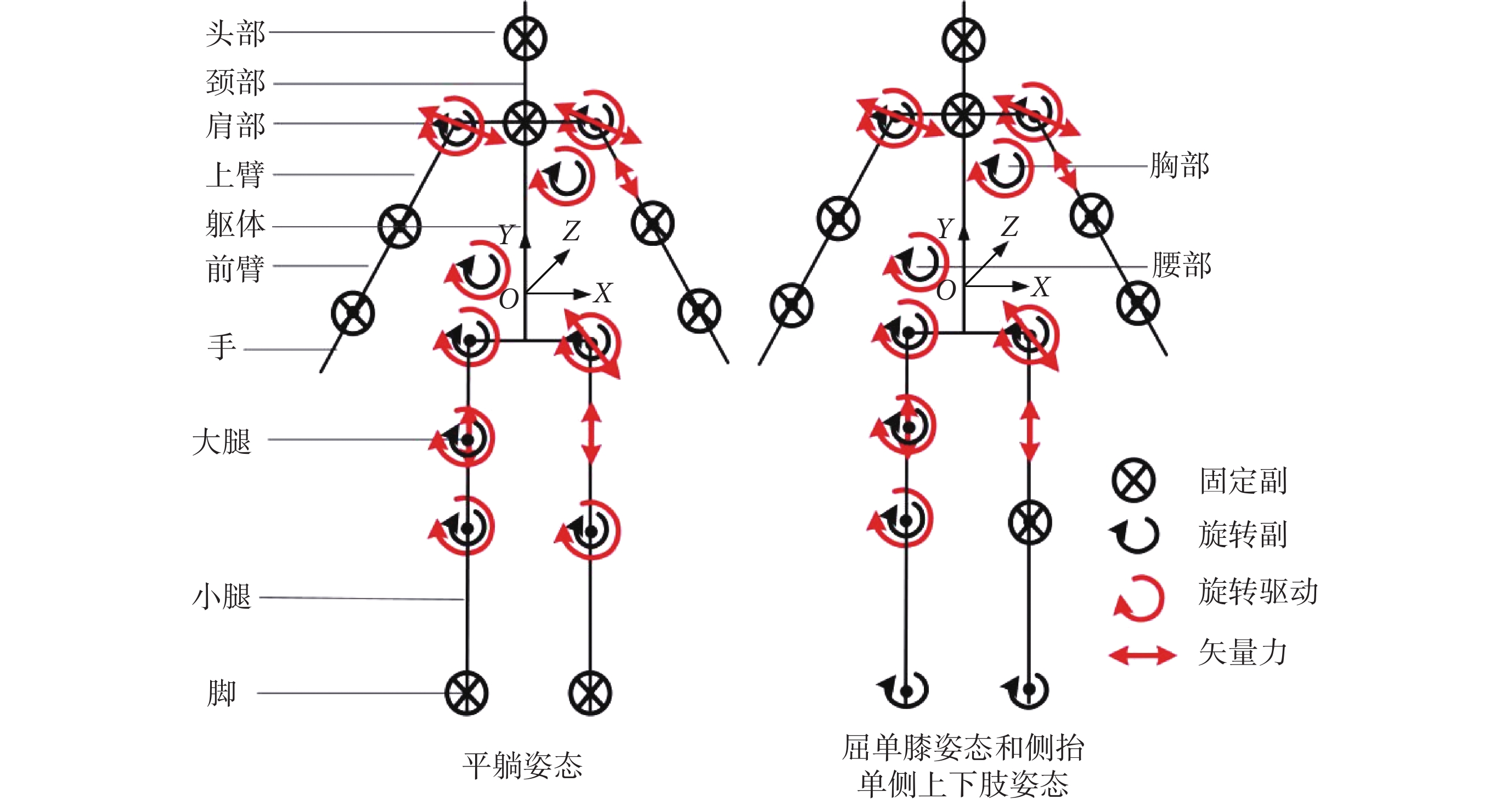 圖1
人體模型約束設置
Figure1.
Human model constraint setting
圖1
人體模型約束設置
Figure1.
Human model constraint setting
人體肢體運動是通過肌肉的收縮和外展來實現的。在仿真時,這些肌肉力也需要加入到模型中,將肌肉力的作用轉化為圍繞著關節作用的矢量力。肌肉作用的起點和終點的連線,即肌拉力線為矢量力的方向,肌肉力的大小為隨時間變化的函數[16-17]。
人體是由多個肢體組成的復雜系統,而多體系統正是由多個物體(剛體、柔體)通過運動鉸連接組成的系統,故利用多體系統動力學理論來推算復雜的人體動力學理論。拉格朗日法是多剛體數學模型建立的典型手段。
對于  個質點所形成的質點系,如果有
個質點所形成的質點系,如果有  個幾何約束,即完整約束,它只限制質點在空間的位置,因而表現為質點坐標的函數,那么獨立坐標就減少為
個幾何約束,即完整約束,它只限制質點在空間的位置,因而表現為質點坐標的函數,那么獨立坐標就減少為  個,我們可以用
個,我們可以用  個獨立參數
個獨立參數  及
及  來表示
來表示  個不獨立的坐標,即
個不獨立的坐標,即
 |
式中, 為拉格朗日廣義坐標,它不一定是長度,可以是角度或其他物理量。在幾何約束的情況下,廣義坐標的數目就是自由度的數目。利用廣義坐標可以推導出拉格朗日方程,即
為拉格朗日廣義坐標,它不一定是長度,可以是角度或其他物理量。在幾何約束的情況下,廣義坐標的數目就是自由度的數目。利用廣義坐標可以推導出拉格朗日方程,即
 |
式(2)中, 是廣義坐標;
是廣義坐標; 是廣義速度;
是廣義速度; 是質點系的動能;
是質點系的動能; 為廣義動量;
為廣義動量; 為廣義力,是
為廣義力,是  的函數,且
的函數,且  的量綱為功的量綱,故
的量綱為功的量綱,故  的量綱將隨
的量綱將隨  的選擇而定,
的選擇而定, 可以是力,也可以為力矩或其他的物理量。
可以是力,也可以為力矩或其他的物理量。
2 基于 ADAMS 的仰臥位側翻動力學仿真
在仰臥位側翻時,身體的各個肢體都在運動,將人體的頭、頸、主軀、左右手、左右腳、左右腿和左右臂簡化為剛體模型,并將肌肉力轉化為施加在剛體上的矢量力。首先,基于 SolidWorks 軟件建立人體三維模型,將模型設置約束調整為三種側翻方式的最初姿態,并導入 ADAMS 軟件進行仿真計算。人體模型的各部分的質量和轉動慣量見表 2[15]。
仿真設置中,將仿真時間統一設置為 2 s,驅動 MOTION 中設置具體的 STEP 函數,STEP 函數的形式為  ,其中
,其中  、
、 表示開始時間和結束時間,
表示開始時間和結束時間, 、
、 表示開始時間的角度和結束時間的角度,
表示開始時間的角度和結束時間的角度, 與
與  的差值為在
的差值為在  和
和  時間段內轉過的角度,即角速度可以表示為
時間段內轉過的角度,即角速度可以表示為  。根據實際人體側翻身角速度設置 STEP 函數,STEP 函數設置得越精確則仿真曲線越圓滑,越接近于實際。實際人體側翻過程中,起到最重要作用的肌肉為胸大肌、腹外斜肌和大腿肌,故著重對這三個肌肉進行力的仿真。仿真結束后,導出仿真曲線。因人體側翻過程中的角速度是非勻速的,故完全模擬實際情況下的時間與角度關系難度很大,選取人體側翻過程中的特征數據來作為模型翻轉的 STEP 函數依據,期間因角速度突變導致力的變化速率大而出現尖銳點,真實的力應該是緩和圓滑的,通過函數擬合的方法將仿真圖像擬合成圓滑的曲線,雖存在誤差,但相對于直接得到的仿真圖像,擬合曲線從趨勢和數值上更與實際情況一致。
。根據實際人體側翻身角速度設置 STEP 函數,STEP 函數設置得越精確則仿真曲線越圓滑,越接近于實際。實際人體側翻過程中,起到最重要作用的肌肉為胸大肌、腹外斜肌和大腿肌,故著重對這三個肌肉進行力的仿真。仿真結束后,導出仿真曲線。因人體側翻過程中的角速度是非勻速的,故完全模擬實際情況下的時間與角度關系難度很大,選取人體側翻過程中的特征數據來作為模型翻轉的 STEP 函數依據,期間因角速度突變導致力的變化速率大而出現尖銳點,真實的力應該是緩和圓滑的,通過函數擬合的方法將仿真圖像擬合成圓滑的曲線,雖存在誤差,但相對于直接得到的仿真圖像,擬合曲線從趨勢和數值上更與實際情況一致。
三種仰臥位側翻方式的胸大肌力、腹外斜肌力和大腿肌力的變化各有特點。
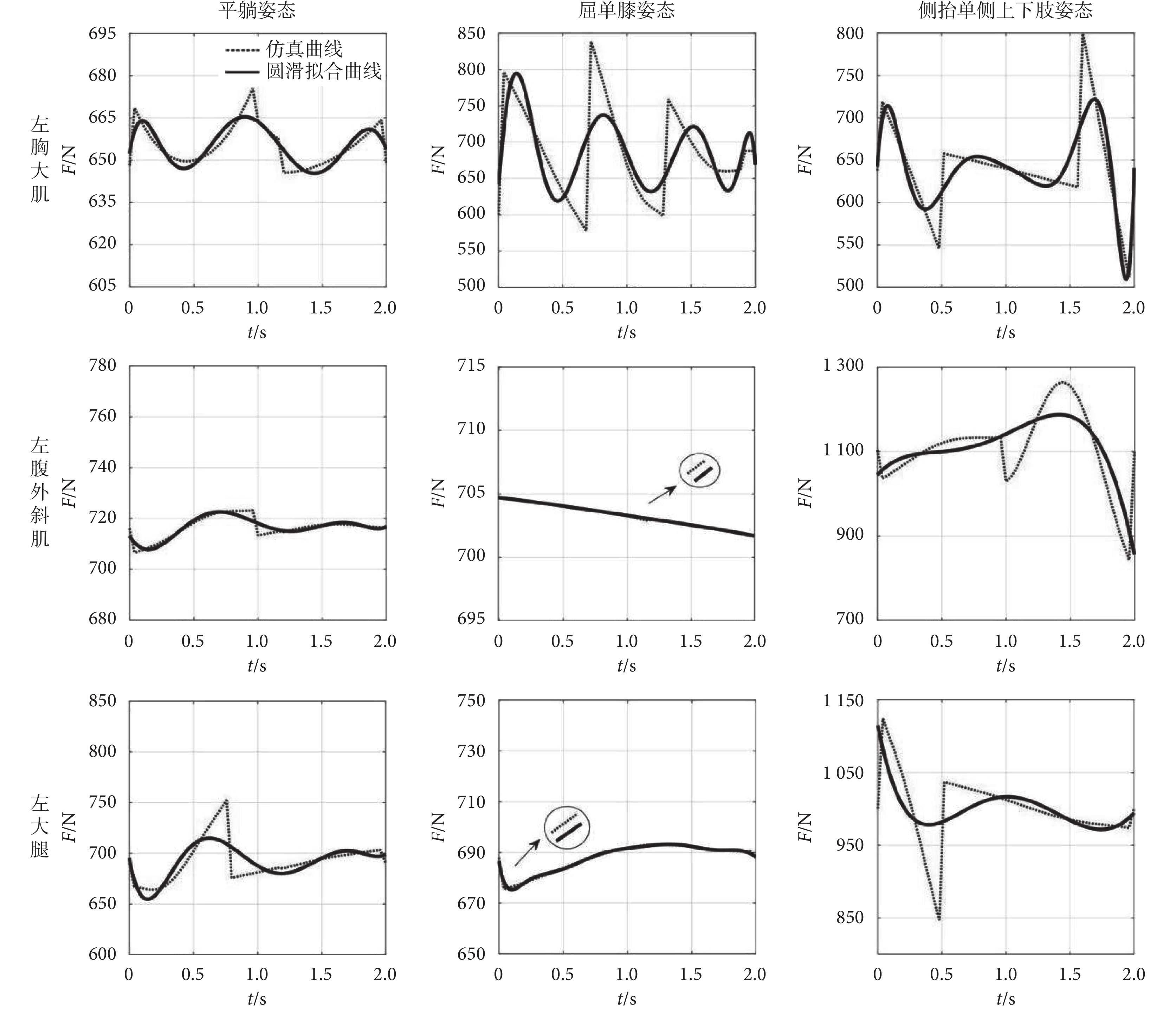
如圖 2 所示,平躺姿態下側翻身過程中,胸大肌處的作用力波動不大,平穩于 656.5 N;腹外斜肌處的作用力先呈現一個小幅度增加,后逐漸穩定于 718 N;大腿處的作用力相對于前兩者而言波動較大,極差約為 75 N,后逐漸穩定于 700 N。屈單膝姿態下側翻身過程中,胸大肌處的作用力波動幅度最大,極差約為 180 N,波動幅度隨時間變小;腹外斜肌處的作用力從 705 N 逐漸下降至 702 N,波動不大,基本不動;大腿處的作用力呈一個上升趨勢,上升幅度為 12.5 N,1 s 后逐漸趨于穩定。側抬單側上下肢姿態下側翻身過程中,胸大肌處的作用力波動幅度最大,極差約為 200 N,0.5~1.5 s 間呈平緩趨勢;腹外斜肌處的作用力先增加后減小,上升幅度約為 150 N,1.5~2 s 內逐漸下降;大腿處的作用力在 0~0.4 s 內呈現下降趨勢,下降幅度約為 100 N,1 s 后逐漸趨于穩定。
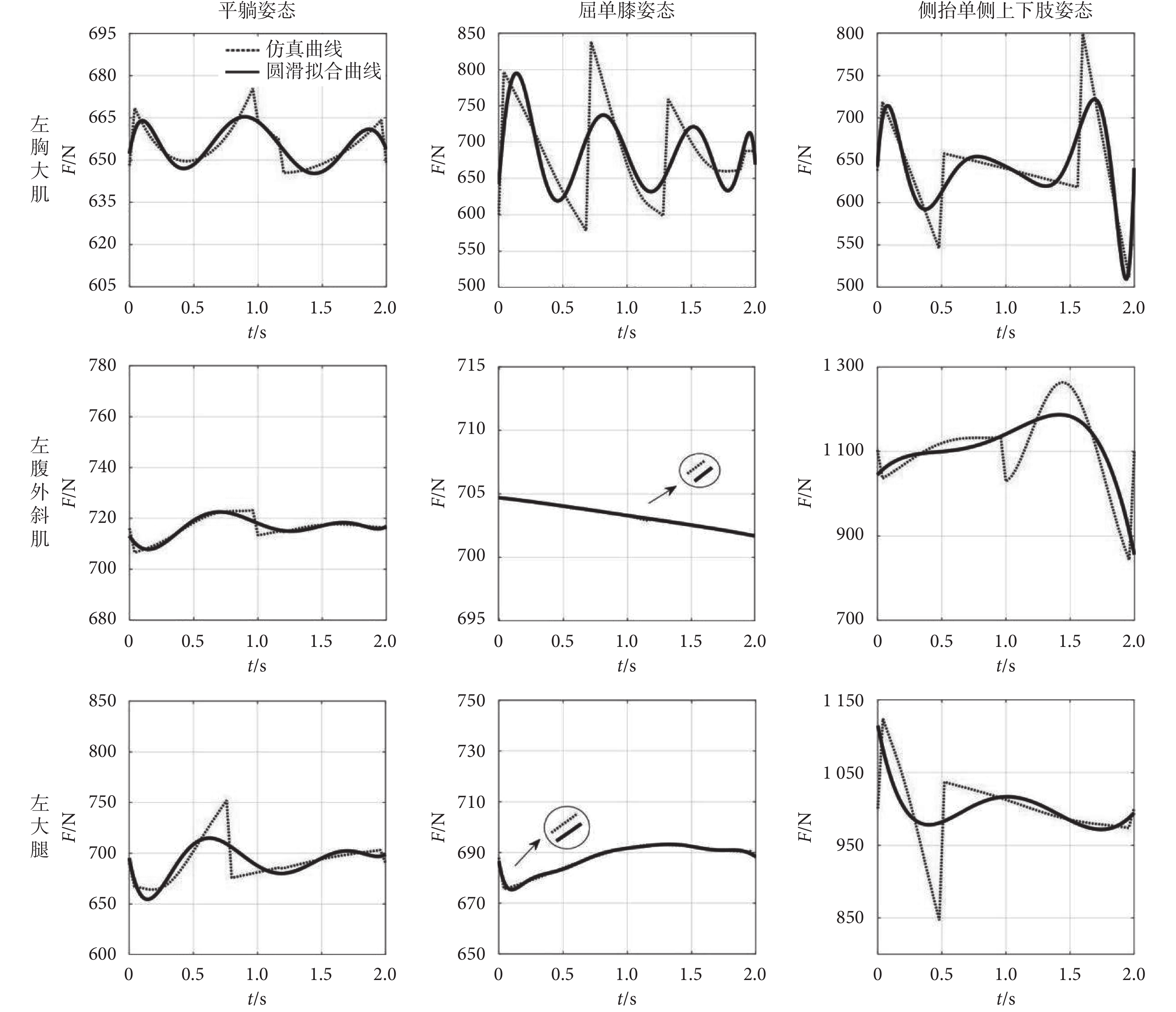 圖2
三種側翻方式左胸大肌、左腹外斜肌和左大腿關節力仿真
Figure2.
Joint force simulation of left pectoralis major, left lateral oblique abdomen and left thigh in three rollover modes
圖2
三種側翻方式左胸大肌、左腹外斜肌和左大腿關節力仿真
Figure2.
Joint force simulation of left pectoralis major, left lateral oblique abdomen and left thigh in three rollover modes
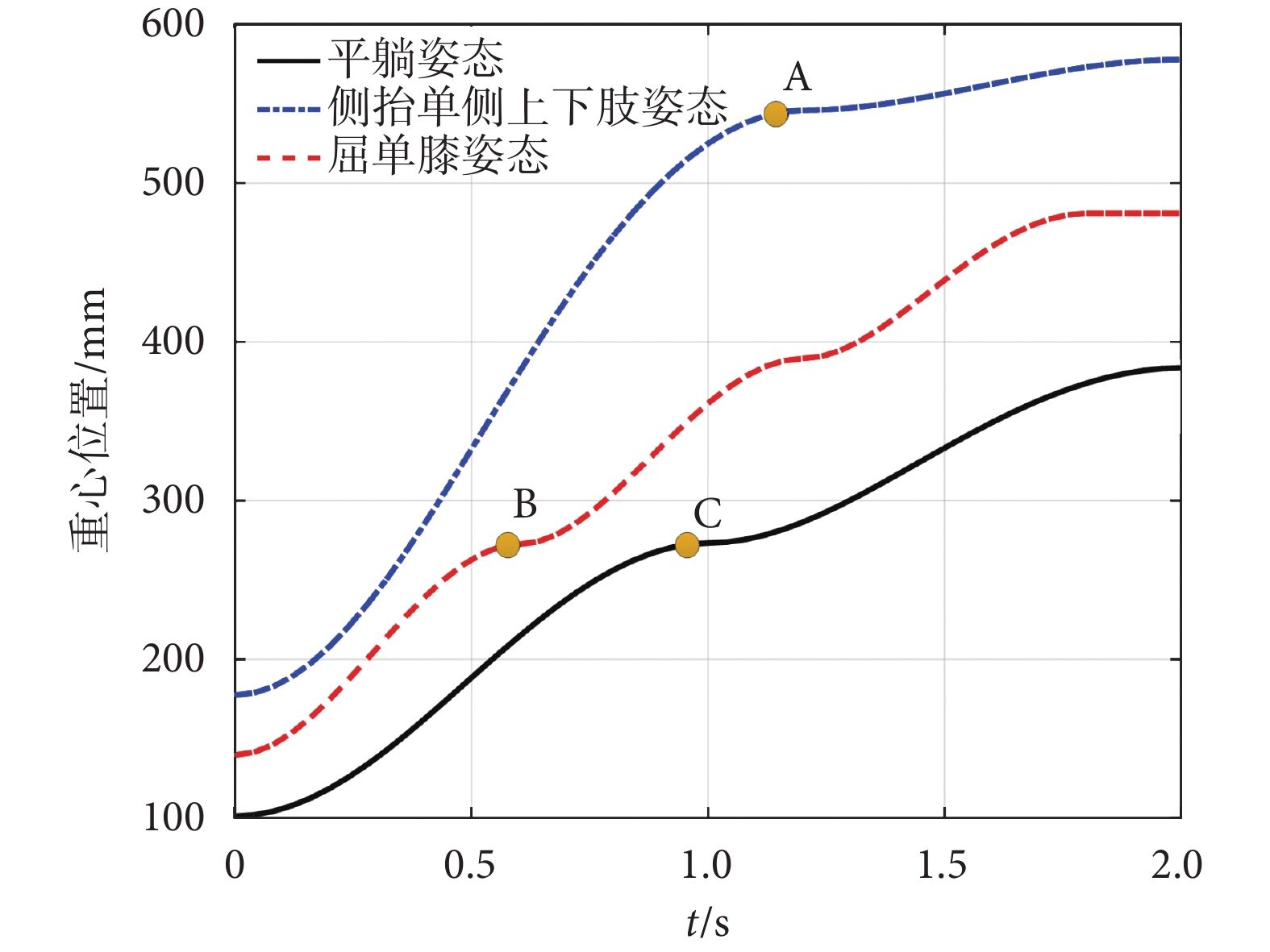
為了了解更詳細的仰臥位側翻運動特性,輸出三種姿態側翻過程的重心變化圖,如圖 3 所示。
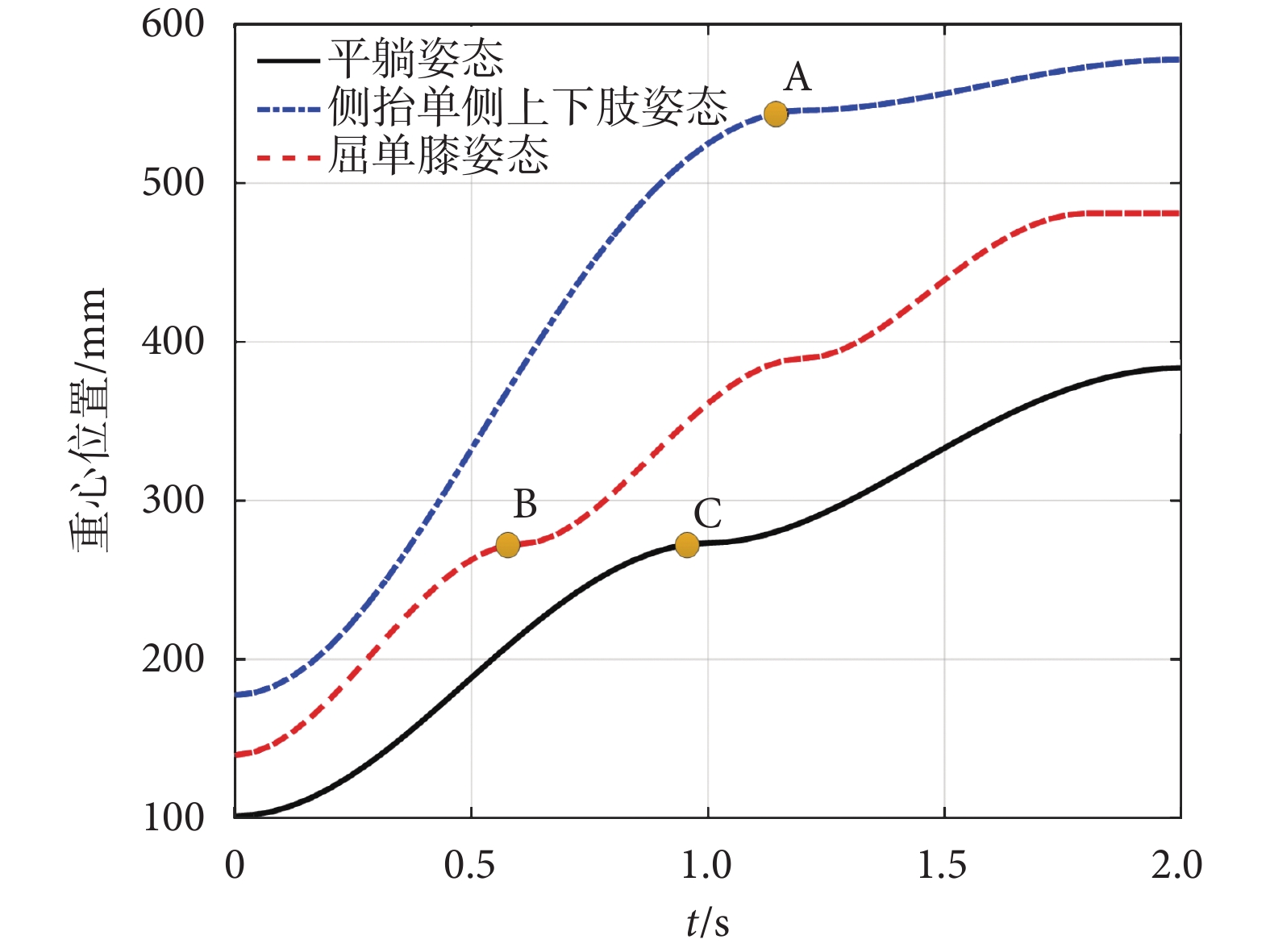 圖3
三種仰臥位側翻方式人體重心變化趨勢
Figure3.
Trends of body gravity center change in three supine rollover modes
圖3
三種仰臥位側翻方式人體重心變化趨勢
Figure3.
Trends of body gravity center change in three supine rollover modes
從重心位移圖看出,平躺姿態向右側翻時,重心從 100 mm 變化到 370 mm;屈單膝姿態向右側翻時,重心從 140 mm 變化到 470 mm;側抬單側上下肢姿態向右側翻時,重心從 180 mm 變化到 575 mm。從該圖的趨勢可知,三種側翻方式的重心均升高,符合實際側翻情況。圖中的 A、B 和 C 點分別代表重心斜率第一次變化點,A 點的斜率最大,側抬左腿姿態側翻時,腿部向上抬起,導致身體的初始重心位置升高,且在側翻 90° 的過程中,側翻效率高,斜率大于 B 點和 C 點;屈單膝姿態側翻時,左腿屈起,初始重心位置升高,且高于平躺姿態,低于側抬左腿姿態,B 點斜率大于 C 點;平躺姿態側翻時,初始重心位置為最低,重心變化較平緩。
3 仰臥位側翻肌電力測量實驗驗證
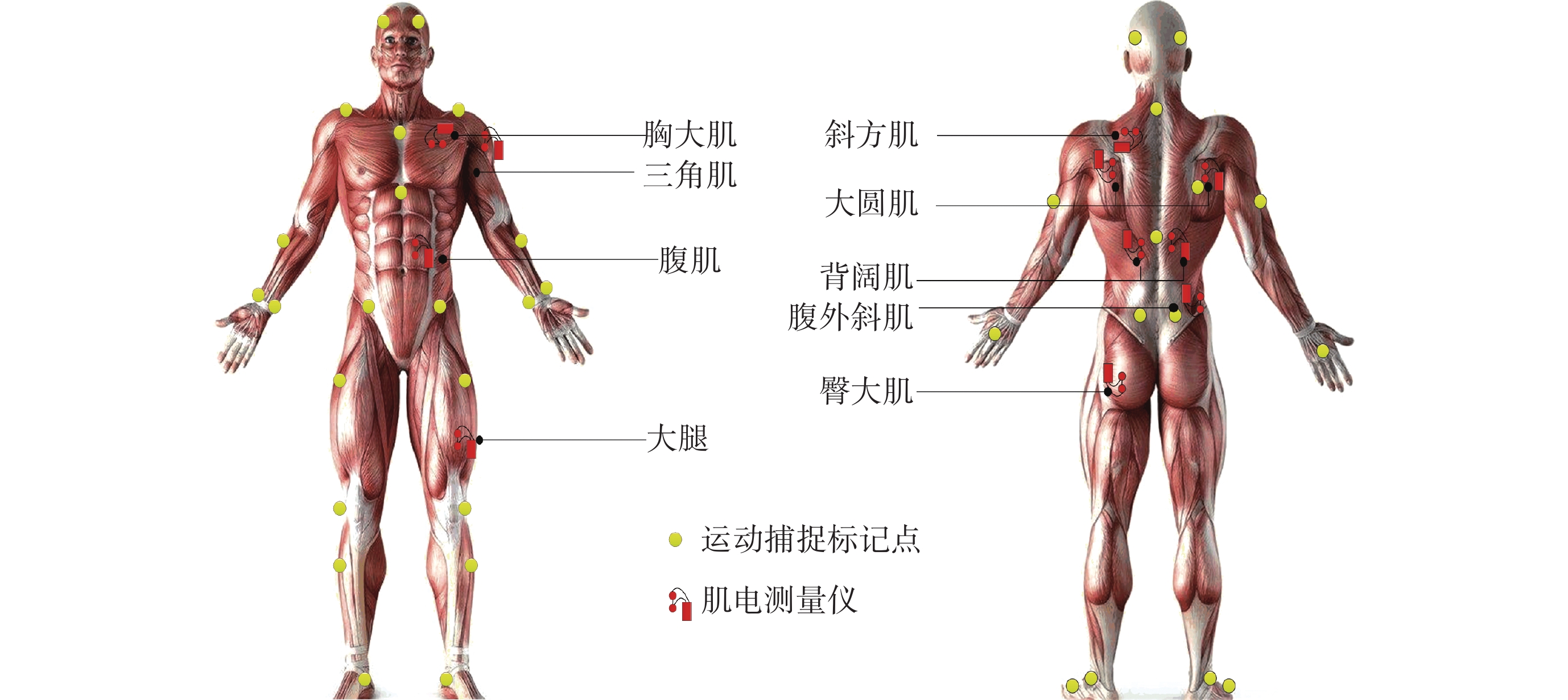
使用英國 VICON 公司的 MX-F20 光學運動捕捉系統對 10 名實驗者進行側翻動作捕捉,使用美國 Noraxon 公司的 DTS 無線表面肌電采集系統對實驗者進行肌電力采集,實驗地點為國家康復輔具研究中心。實驗者均為健康男性志愿者,年齡 20~24 歲,身高 170~175 cm,體重 55~80 kg,身體健康,無不良隱患,符合實驗要求。實驗前實驗者已填寫知情同意書,并完成倫理審查。
在實驗者的頭部、胸部、肩部、腹部、腕部、腰部、大腿、小腿和腳部粘貼運動捕捉標記點,用來捕捉人體的 23 個剛體部位的運動情況。同時將肌電塊粘貼于實驗者的胸大肌、斜方肌、三角肌、大圓肌(左)、大圓肌(右)、腹肌、背闊肌(左)、背闊肌(右)、腹外斜肌、臀大肌和大腿共 11 處主要肌肉發力位置,如圖 4 所示。
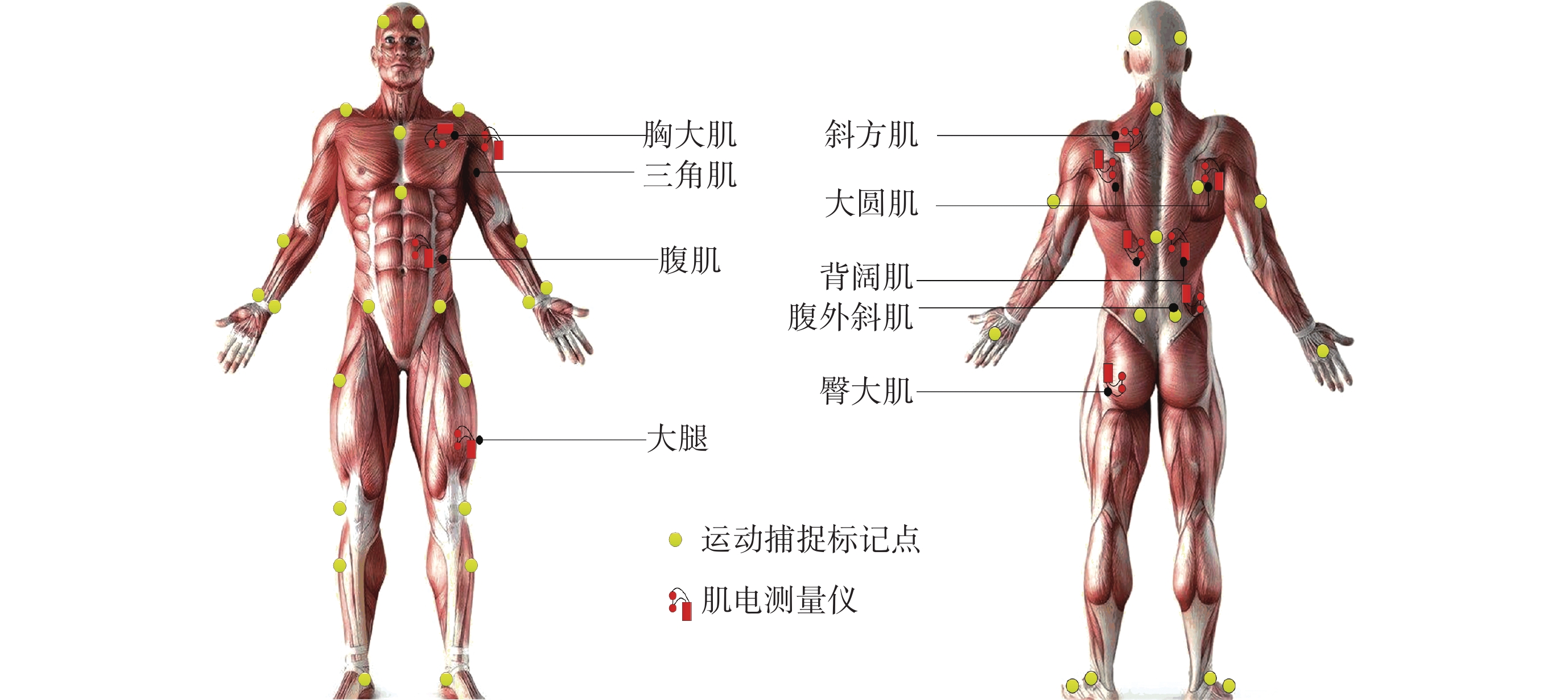 圖4
肌電測量點與運動捕捉點
Figure4.
Electromyogram measurement points and motion capture points
圖4
肌電測量點與運動捕捉點
Figure4.
Electromyogram measurement points and motion capture points
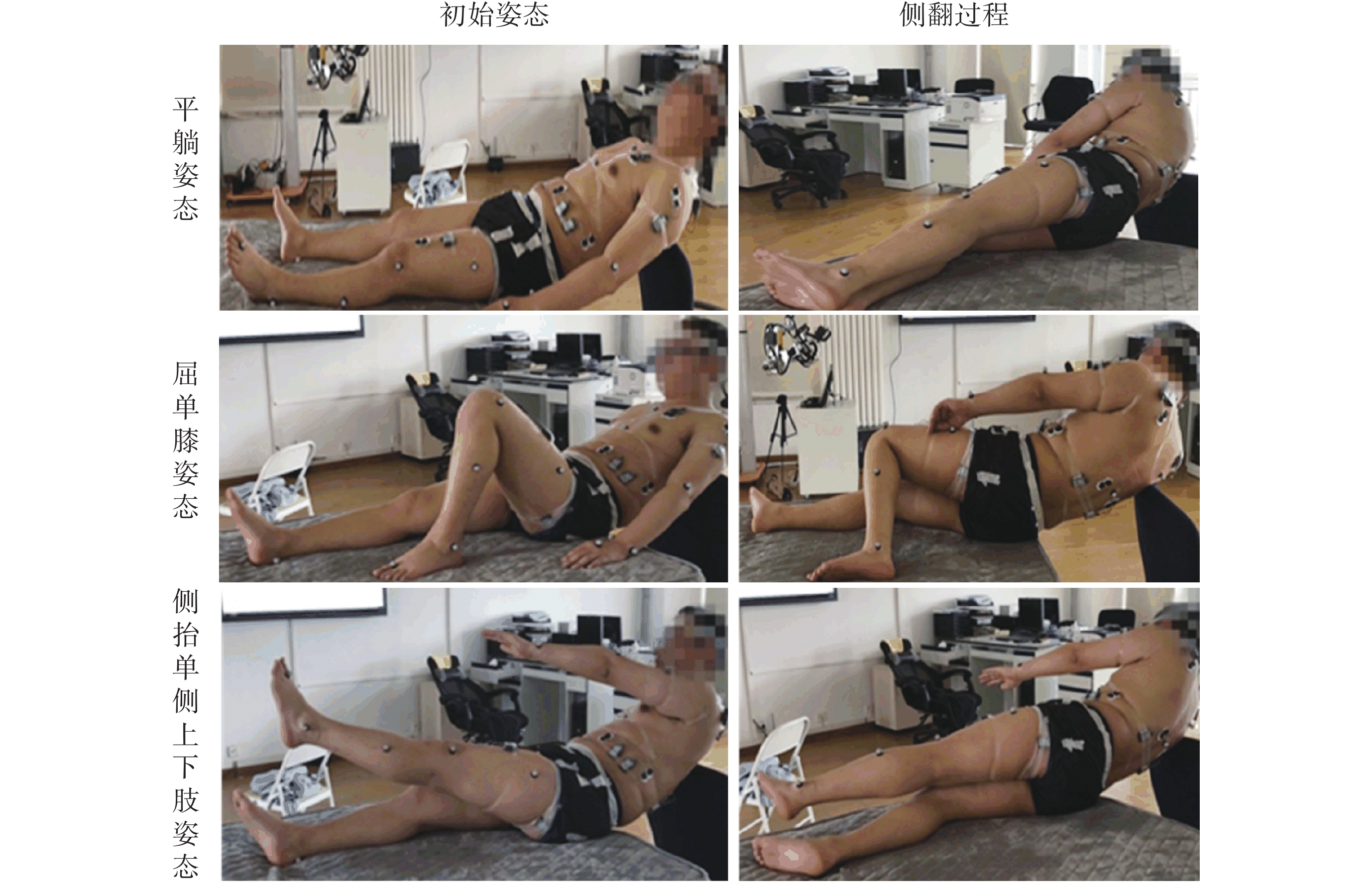
因人體具有對稱性,且只做了右側翻實驗,故主要標記了人體左側的肌電測量點。實驗分為三組,分別為平躺姿態下的側翻實驗、屈單膝姿態下的側翻實驗和側抬單側上下肢姿態下的側翻實驗。每一組動作的時間為 2 s,與仿真時間一樣,每組實驗做三遍,如圖 5 所示。
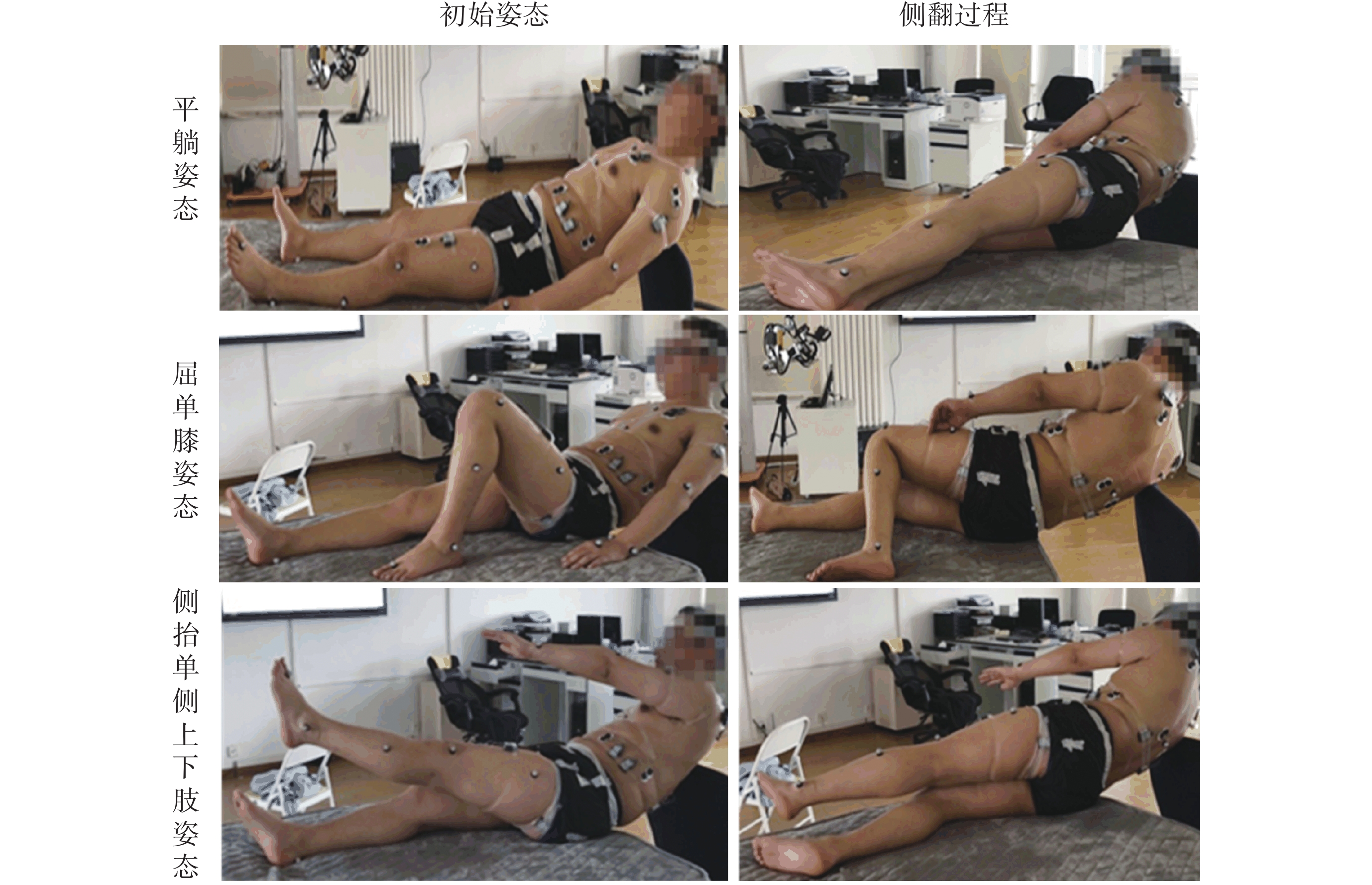 圖5
三組仰臥位側翻實驗
Figure5.
Three supine rollover experiments
圖5
三組仰臥位側翻實驗
Figure5.
Three supine rollover experiments
實驗得到三種仰臥位側翻姿態的肌電信號,對信號進行平均處理、絕對值處理、除噪和平滑處理,并進行數據擬合處理,最小二乘法多項式擬合原理為:給定數據點  ,其中 i = 1,
,其中 i = 1,  ,求得近似曲線
,求得近似曲線  ,使得近似曲線與
,使得近似曲線與  的偏差最小。近似曲線在
的偏差最小。近似曲線在  處的偏差
處的偏差 
 。
。
按偏差平方和最小原則選取擬合曲線,即
 |
設擬合多項式為:
 |
各點到該曲線的距離之和,即偏差平方和如下:
 |
對式(5)右邊 ai 求偏導數,并進行化簡,得到:
 |
 |
 |
 |
將式(6)、(7)和(8)表示成 Vandermonde 矩陣形式,得到:
 |
式(9)化簡后得到:
 |
根據式(10)的系數矩陣便可以得到擬合曲線。
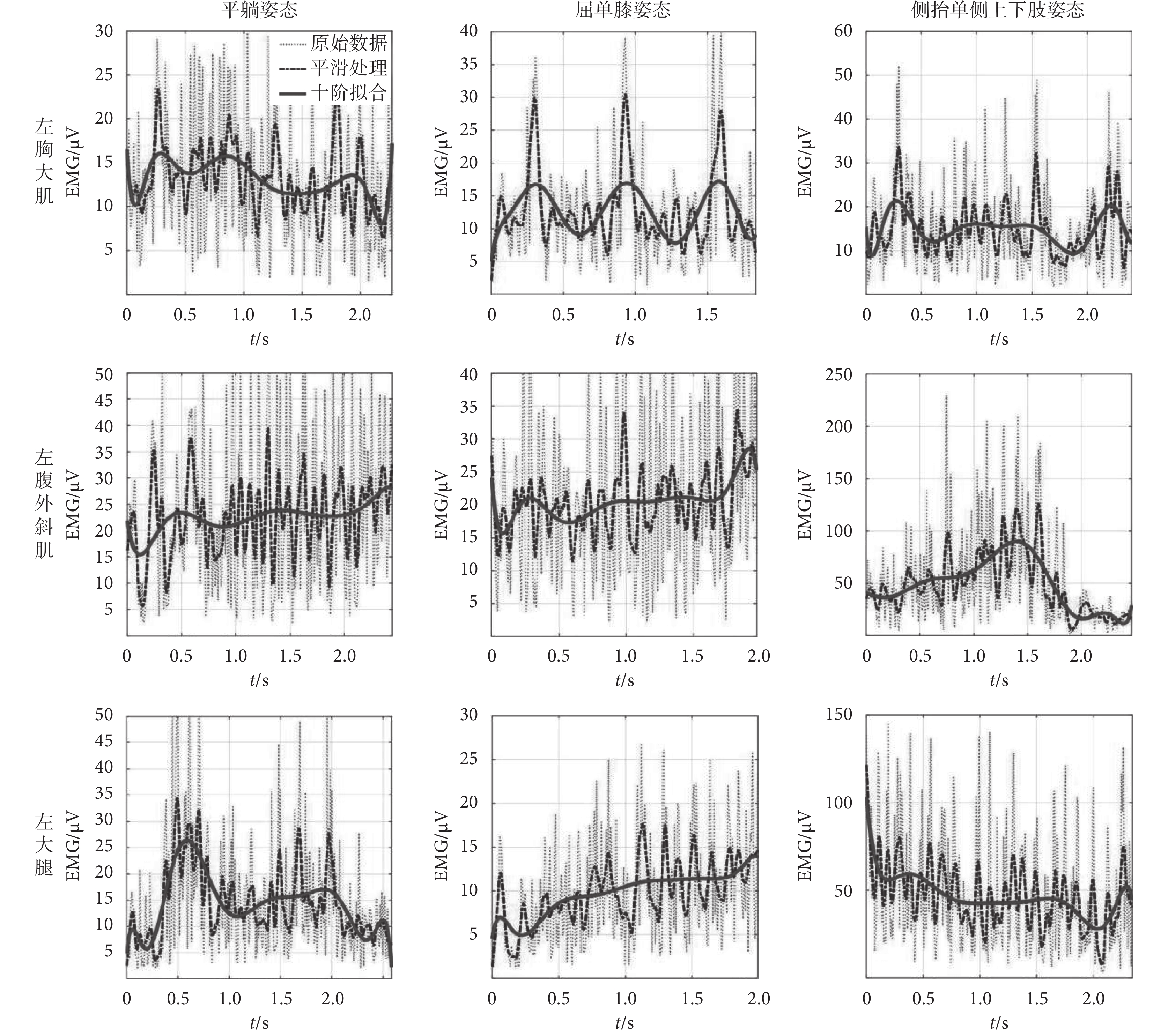
10 名試驗者體型相近,側翻動作無明顯差異,所得結果的數值范圍與變化趨勢基本相同。因每次實驗都能夠反映肌電力的變化規律,而多次實驗結果的平均值則會破壞這種規律,所以選取其中一組結果進行具體分析。取擬合階數 k = 10,得到了肌電信號圖,如圖 6 所示。
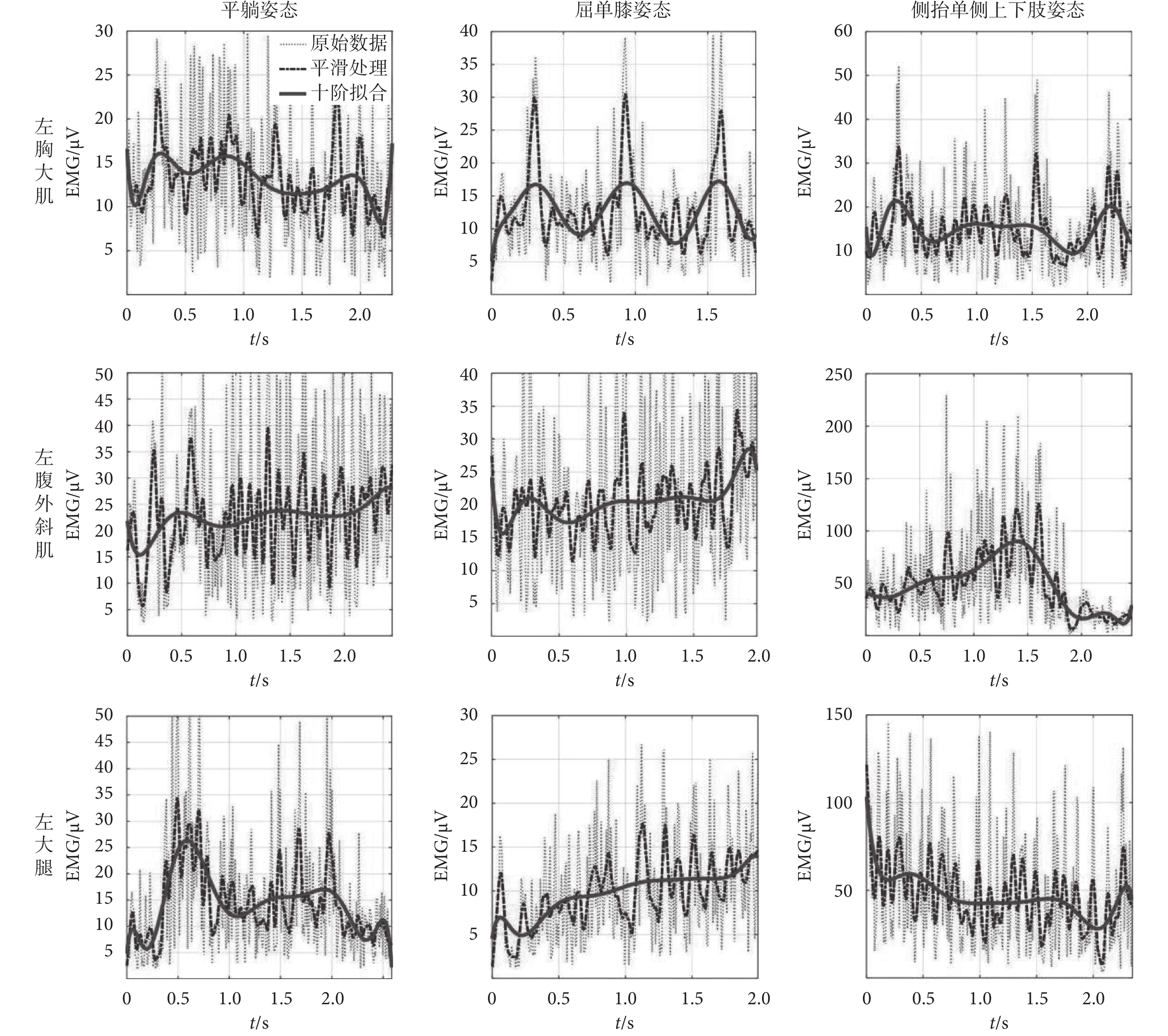 圖6
三種側翻方式左胸大肌、左腹外斜肌和左大腿肌電信號圖
Figure6.
Electromyogram of left pectoralis major, left lateral oblique abdomen and left thigh in three rollover modes
圖6
三種側翻方式左胸大肌、左腹外斜肌和左大腿肌電信號圖
Figure6.
Electromyogram of left pectoralis major, left lateral oblique abdomen and left thigh in three rollover modes
仿真為理想條件下的結果,實驗結果則受很多因素的影響,但從圖 6 與圖 2 的對比中可以看出,實驗圖像與仿真圖像在數據范圍和變化趨勢上相對一致,可以證明仿真的正確性。最優人體側翻姿態是一個需要從全身肌肉的用力變化和大小來綜合考量的問題,基于三種姿態下的側翻身實驗與仿真分析,發現各個肌肉在不同姿態下側翻過程中承擔的角色和重要程度不同,故無法通過三個肌肉的肌肉力變化來得出一個最優側翻姿態,只能對這三種側翻姿態方式進行綜合評價,在之后的工作中希望通過更多部位的肌肉力變化來對側翻過程進行綜合考量。
4 結論
基于仰臥位側翻的人體動力學模型,進行了平躺姿態、屈單膝姿態和側抬單側上下肢姿態三種常見仰臥位側翻姿態的動力學仿真,得到三種人體仰臥位姿態下側翻時以胸大肌力、腹外斜肌力和大腿肌力為代表的驅動力的變化情況。根據動力學仿真過程進行了人體仰臥位側翻的肌電力測量實驗,得到了與仿真胸部、腰部和大腿處位置相同的胸大肌、腹外斜肌和大腿肌的肌電測量值,通過對比仿真數據和實驗數據的數據范圍和變化趨勢,證明了仿真的有效性和準確性。面向仰臥位側翻的動力學仿真及實驗驗證,綜合評價了三種姿態下的仰臥位側翻運動中各個肌肉力的變化,揭示了人體仰臥位側翻的運動特性,為后期輔助側翻機器人機構的設計提供了設計標準和理論參考依據,并為機器人機構輔助翻身效果的仿真驗證奠定了基礎。
利益沖突聲明:本文全體作者均聲明不存在利益沖突。
引言
近年來,我國的人口老齡化現象日益嚴重,在 2015 年,65 歲及以上人口近 1.5 億人,且在近十年呈上升趨勢。老年人的疾病大多數是慢性疾病,其特點是治療周期長,治療效果不明顯,社區服務中心收治的對象 90% 是久臥患者[1]。對于長期臥床者或癱瘓老人來說,臥床導致長時間的靜態載荷,阻塞血液供應,容易引發壓瘡(又名褥瘡),給患者帶來很大的痛苦,是目前臨床中造成最大經濟損失的病癥之一。預防壓瘡要做到定時側翻,一般情況下每兩小時側翻一次,必要時每一小時側翻一次。很多久臥患者沒有自己的行為意識,側翻動作主要依靠護理人員協助完成。當前輔助側翻設備多為翻身床、翻身床單和翻身枕等,這些設備需要人工輔助實現功能,且在使用時沒有考慮到人體工學,易給患者身體帶來不適感,因此研發使用方便、舒適、機構靈巧、可靠的輔助側翻機器人,具有巨大的社會需求。
為使輔助側翻機器人與人體自然的側翻動作相吻合,首先要明確人體側翻的運動機制。在現有人體運動的研究中,很多研究探討了人行走、蹲起的運動學、動力學,Hingtgent 等[2]建立了一個上肢的運動學模型,用來分析偏癱患者在上肢觸物運動過程中的最大角加速度及其出現時間,并與正常上肢運動相比較,通過準確量化運動過程,輔助康復治療。Tang 等[3]建立了人體骨肌系統生物力學模型及相關的實驗和計算方法,并對人體下肢運動學、動力學和肌肉激活度進行了計算與分析。Hemmerich 等[4]對 30 名健康的印度志愿者進行了日常大活動范圍髖、膝、踝關節的運動學測量,為設計適合非西方患者的假體提供基礎。Riener 等[5]進行了實驗,對測試者在不同坡度的樓梯上下行走時下肢的運動學與動力學進行了分析。
國內也有很多研究者在探討人體運動特征。張燕等[6]利用 ADAMS 軟件仿真人體下肢在不同路況下行走的穩定性來驗證模型的正確性。徐中華等[7]建立二連桿機構進行動力學仿真,測量出仿真模型在行走時的關節角度和力矩,與正常人體下肢受力對比,證明了仿真模型的有效性。董玉紅等[8]為幫助單側肢體運動障礙的患者進行下肢康復訓練,對人體下肢屈伸運動進行了動力學建模與仿真,仿真結果為下肢康復訓練器械的設計提供了參考。但是,目前關于人體仰臥位側翻的人體動力學的研究還很少。
本文擬面向仰臥位側翻動作研究,利用 ADAMS 軟件進行人體仰臥位側翻的動力學仿真,分析側翻過程中的胸部、腰部和腿部關節力和人體模型質心位置變化。然后,通過肌電圖(electromyogram,EMG)測量實驗者仰臥位側翻過程的肌電值,并與仿真模型同部位的力的變化圖進行對比,通過對人體仰臥位側翻動作機制的研究,可以為側翻機器人的設計提供思路,有助于降低壓瘡的發生率,同時所建模型可為后期機器人輔助側翻效果的仿真驗證奠定基礎。
1 面向仰臥位側翻的人體動力學建模
從解剖學角度分析,人體骨肌系統是由骨、骨連接和骨骼肌組成,成人骨肌約占體重的 60%,全身骨節關節連成骨骼,構成堅硬的人體支架。在運動中,骨起杠桿作用,關節是運動的樞紐,骨骼肌是運動的動力器官。綜合分析各個肌肉的功能[9-13]以及仰臥位側翻的運動特征,各肌肉中與側翻運動較為相關的肌肉為背淺肌、胸上肢肌、肩肌和髖肌。
通過對人體仰臥位側翻運動的研究,認為左側翻與右側翻運動具有相似性,故論文只分析右側翻運動。假設常見的三種側翻動作分別為:平躺姿態下的右側翻運動,即人四肢平放于床上,身體向右側翻;屈單膝姿態下的右側翻運動,即人左膝關節彎曲約 60°,右腿和雙上臂保持平放姿態,身體向右側翻;側抬單側上下肢姿態下的右側翻運動,即左大腿與左小腿、左上臂與左前臂向上抬起約 30°,右臂和右腿保持平放姿態,身體向右側翻。
做仰臥位側翻動作時,可以將人體簡化為 15 個部分:頭部、頸部、主軀、左上臂、左前臂、左手、右上臂、右前臂、右手、左大腿、左小腿、左腳、右大腿、右小腿和右腳,其中各部分構成獨立剛體,并通過關節鉸連接。為了簡化人體復雜結構,作以下假定[14]:① 在每一個剛體中,骨骼和軟組織都被認為是剛體。② 軟組織變形對每一個剛體的機械特性影響不大。③ 忽略人體臥姿側翻過程中單個剛體系統內各關節微小變化。④ 忽略韌帶對各關節運動的影響。
三種姿態下右側翻運動中,人體的左肩關節向右內斂,帶動腰部向右側翻,同時人的臀部向上抬起并向右側翻,因初始姿態不同,部分約束的設置會有所不同,三種姿態人體模型的約束設置如表 1 所示[6]。
為了更直觀地表述各約束的設置,圖 1 給出了三種仰臥位側翻姿態的約束設置圖,并加入了矢量力來代表肌肉力[15]。選取笛卡爾坐標系,全局坐標系的原點 O 在人體模型的質心處,固定在軀干上不動,Z 軸垂直于地面向下。
圖1
人體模型約束設置
Figure1.
Human model constraint setting
人體肢體運動是通過肌肉的收縮和外展來實現的。在仿真時,這些肌肉力也需要加入到模型中,將肌肉力的作用轉化為圍繞著關節作用的矢量力。肌肉作用的起點和終點的連線,即肌拉力線為矢量力的方向,肌肉力的大小為隨時間變化的函數[16-17]。
人體是由多個肢體組成的復雜系統,而多體系統正是由多個物體(剛體、柔體)通過運動鉸連接組成的系統,故利用多體系統動力學理論來推算復雜的人體動力學理論。拉格朗日法是多剛體數學模型建立的典型手段。
對于 個質點所形成的質點系,如果有 個幾何約束,即完整約束,它只限制質點在空間的位置,因而表現為質點坐標的函數,那么獨立坐標就減少為 個,我們可以用 個獨立參數 及 來表示 個不獨立的坐標,即
|
式中, 為拉格朗日廣義坐標,它不一定是長度,可以是角度或其他物理量。在幾何約束的情況下,廣義坐標的數目就是自由度的數目。利用廣義坐標可以推導出拉格朗日方程,即
|
式(2)中, 是廣義坐標; 是廣義速度; 是質點系的動能; 為廣義動量; 為廣義力,是 的函數,且 的量綱為功的量綱,故 的量綱將隨 的選擇而定, 可以是力,也可以為力矩或其他的物理量。
2 基于 ADAMS 的仰臥位側翻動力學仿真
在仰臥位側翻時,身體的各個肢體都在運動,將人體的頭、頸、主軀、左右手、左右腳、左右腿和左右臂簡化為剛體模型,并將肌肉力轉化為施加在剛體上的矢量力。首先,基于 SolidWorks 軟件建立人體三維模型,將模型設置約束調整為三種側翻方式的最初姿態,并導入 ADAMS 軟件進行仿真計算。人體模型的各部分的質量和轉動慣量見表 2[15]。
仿真設置中,將仿真時間統一設置為 2 s,驅動 MOTION 中設置具體的 STEP 函數,STEP 函數的形式為 ,其中 、 表示開始時間和結束時間,、 表示開始時間的角度和結束時間的角度, 與 的差值為在 和 時間段內轉過的角度,即角速度可以表示為 。根據實際人體側翻身角速度設置 STEP 函數,STEP 函數設置得越精確則仿真曲線越圓滑,越接近于實際。實際人體側翻過程中,起到最重要作用的肌肉為胸大肌、腹外斜肌和大腿肌,故著重對這三個肌肉進行力的仿真。仿真結束后,導出仿真曲線。因人體側翻過程中的角速度是非勻速的,故完全模擬實際情況下的時間與角度關系難度很大,選取人體側翻過程中的特征數據來作為模型翻轉的 STEP 函數依據,期間因角速度突變導致力的變化速率大而出現尖銳點,真實的力應該是緩和圓滑的,通過函數擬合的方法將仿真圖像擬合成圓滑的曲線,雖存在誤差,但相對于直接得到的仿真圖像,擬合曲線從趨勢和數值上更與實際情況一致。
三種仰臥位側翻方式的胸大肌力、腹外斜肌力和大腿肌力的變化各有特點。
如圖 2 所示,平躺姿態下側翻身過程中,胸大肌處的作用力波動不大,平穩于 656.5 N;腹外斜肌處的作用力先呈現一個小幅度增加,后逐漸穩定于 718 N;大腿處的作用力相對于前兩者而言波動較大,極差約為 75 N,后逐漸穩定于 700 N。屈單膝姿態下側翻身過程中,胸大肌處的作用力波動幅度最大,極差約為 180 N,波動幅度隨時間變小;腹外斜肌處的作用力從 705 N 逐漸下降至 702 N,波動不大,基本不動;大腿處的作用力呈一個上升趨勢,上升幅度為 12.5 N,1 s 后逐漸趨于穩定。側抬單側上下肢姿態下側翻身過程中,胸大肌處的作用力波動幅度最大,極差約為 200 N,0.5~1.5 s 間呈平緩趨勢;腹外斜肌處的作用力先增加后減小,上升幅度約為 150 N,1.5~2 s 內逐漸下降;大腿處的作用力在 0~0.4 s 內呈現下降趨勢,下降幅度約為 100 N,1 s 后逐漸趨于穩定。
圖2
三種側翻方式左胸大肌、左腹外斜肌和左大腿關節力仿真
Figure2.
Joint force simulation of left pectoralis major, left lateral oblique abdomen and left thigh in three rollover modes
為了了解更詳細的仰臥位側翻運動特性,輸出三種姿態側翻過程的重心變化圖,如圖 3 所示。
圖3
三種仰臥位側翻方式人體重心變化趨勢
Figure3.
Trends of body gravity center change in three supine rollover modes
從重心位移圖看出,平躺姿態向右側翻時,重心從 100 mm 變化到 370 mm;屈單膝姿態向右側翻時,重心從 140 mm 變化到 470 mm;側抬單側上下肢姿態向右側翻時,重心從 180 mm 變化到 575 mm。從該圖的趨勢可知,三種側翻方式的重心均升高,符合實際側翻情況。圖中的 A、B 和 C 點分別代表重心斜率第一次變化點,A 點的斜率最大,側抬左腿姿態側翻時,腿部向上抬起,導致身體的初始重心位置升高,且在側翻 90° 的過程中,側翻效率高,斜率大于 B 點和 C 點;屈單膝姿態側翻時,左腿屈起,初始重心位置升高,且高于平躺姿態,低于側抬左腿姿態,B 點斜率大于 C 點;平躺姿態側翻時,初始重心位置為最低,重心變化較平緩。
3 仰臥位側翻肌電力測量實驗驗證
使用英國 VICON 公司的 MX-F20 光學運動捕捉系統對 10 名實驗者進行側翻動作捕捉,使用美國 Noraxon 公司的 DTS 無線表面肌電采集系統對實驗者進行肌電力采集,實驗地點為國家康復輔具研究中心。實驗者均為健康男性志愿者,年齡 20~24 歲,身高 170~175 cm,體重 55~80 kg,身體健康,無不良隱患,符合實驗要求。實驗前實驗者已填寫知情同意書,并完成倫理審查。
在實驗者的頭部、胸部、肩部、腹部、腕部、腰部、大腿、小腿和腳部粘貼運動捕捉標記點,用來捕捉人體的 23 個剛體部位的運動情況。同時將肌電塊粘貼于實驗者的胸大肌、斜方肌、三角肌、大圓肌(左)、大圓肌(右)、腹肌、背闊肌(左)、背闊肌(右)、腹外斜肌、臀大肌和大腿共 11 處主要肌肉發力位置,如圖 4 所示。
圖4
肌電測量點與運動捕捉點
Figure4.
Electromyogram measurement points and motion capture points
因人體具有對稱性,且只做了右側翻實驗,故主要標記了人體左側的肌電測量點。實驗分為三組,分別為平躺姿態下的側翻實驗、屈單膝姿態下的側翻實驗和側抬單側上下肢姿態下的側翻實驗。每一組動作的時間為 2 s,與仿真時間一樣,每組實驗做三遍,如圖 5 所示。
圖5
三組仰臥位側翻實驗
Figure5.
Three supine rollover experiments
實驗得到三種仰臥位側翻姿態的肌電信號,對信號進行平均處理、絕對值處理、除噪和平滑處理,并進行數據擬合處理,最小二乘法多項式擬合原理為:給定數據點 ,其中 i = 1, ,求得近似曲線 ,使得近似曲線與 的偏差最小。近似曲線在 處的偏差 。
按偏差平方和最小原則選取擬合曲線,即
|
設擬合多項式為:
|
各點到該曲線的距離之和,即偏差平方和如下:
|
對式(5)右邊 ai 求偏導數,并進行化簡,得到:
|
|
|
|
將式(6)、(7)和(8)表示成 Vandermonde 矩陣形式,得到:
|
式(9)化簡后得到:
|
根據式(10)的系數矩陣便可以得到擬合曲線。
10 名試驗者體型相近,側翻動作無明顯差異,所得結果的數值范圍與變化趨勢基本相同。因每次實驗都能夠反映肌電力的變化規律,而多次實驗結果的平均值則會破壞這種規律,所以選取其中一組結果進行具體分析。取擬合階數 k = 10,得到了肌電信號圖,如圖 6 所示。
圖6
三種側翻方式左胸大肌、左腹外斜肌和左大腿肌電信號圖
Figure6.
Electromyogram of left pectoralis major, left lateral oblique abdomen and left thigh in three rollover modes
仿真為理想條件下的結果,實驗結果則受很多因素的影響,但從圖 6 與圖 2 的對比中可以看出,實驗圖像與仿真圖像在數據范圍和變化趨勢上相對一致,可以證明仿真的正確性。最優人體側翻姿態是一個需要從全身肌肉的用力變化和大小來綜合考量的問題,基于三種姿態下的側翻身實驗與仿真分析,發現各個肌肉在不同姿態下側翻過程中承擔的角色和重要程度不同,故無法通過三個肌肉的肌肉力變化來得出一個最優側翻姿態,只能對這三種側翻姿態方式進行綜合評價,在之后的工作中希望通過更多部位的肌肉力變化來對側翻過程進行綜合考量。
4 結論
基于仰臥位側翻的人體動力學模型,進行了平躺姿態、屈單膝姿態和側抬單側上下肢姿態三種常見仰臥位側翻姿態的動力學仿真,得到三種人體仰臥位姿態下側翻時以胸大肌力、腹外斜肌力和大腿肌力為代表的驅動力的變化情況。根據動力學仿真過程進行了人體仰臥位側翻的肌電力測量實驗,得到了與仿真胸部、腰部和大腿處位置相同的胸大肌、腹外斜肌和大腿肌的肌電測量值,通過對比仿真數據和實驗數據的數據范圍和變化趨勢,證明了仿真的有效性和準確性。面向仰臥位側翻的動力學仿真及實驗驗證,綜合評價了三種姿態下的仰臥位側翻運動中各個肌肉力的變化,揭示了人體仰臥位側翻的運動特性,為后期輔助側翻機器人機構的設計提供了設計標準和理論參考依據,并為機器人機構輔助翻身效果的仿真驗證奠定了基礎。
利益沖突聲明:本文全體作者均聲明不存在利益沖突。