提出并設計一種用于下肢智能假肢的步態仿真模擬與評測系統的軟硬件平臺,從而可通過機器測試代替人體穿戴測試,定量分析智能膝關節假肢的穿戴對稱性效果。通過全身三維步態與運動分析系統儀器采集成年人的關節角度和步幅等步態數據,提取模擬步態特征曲線,通過相應關節擬合步態曲線實驗,驗證測試平臺的可行性,然后將所研發智能膝關節假肢穿戴在假肢測評系統上,定量分析步態對稱效果。結果表明所研發智能膝關節不同速度下的步態對稱性無明顯差異,均可超過 88%,假肢步態仿真模擬與評測對下肢智能假肢的功能模擬和評測具有良好的效果。
引用本文: 喻貝貝, 喻洪流, 孟青云, 孟巧玲, 曹武警. 基于假肢步態仿真模擬與評測系統的步態對稱性研究. 生物醫學工程學雜志, 2019, 36(6): 924-929. doi: 10.7507/1001-5515.201811038 復制
版權信息: ?四川大學華西醫院華西期刊社《生物醫學工程學雜志》版權所有,未經授權不得轉載、改編
引言
智能假肢研發過程中,為了測試假肢性能的好壞,需要殘疾志愿者配合做大量的測試實驗。國外學者對此報道過很多相關的研究。例如,Ko 等[1]通過測試三名成年男性截肢患者足踝關節的能量存儲和恢復情況,判定他們穿戴不同假肢踝關節的生物力學特征。類似地,Raschke 等[2]通過記錄 11 例創傷性截肢患者七天時間內穿戴假肢的磨損程度,分析不同假肢的生物力學特性,評估相應假肢的性能,以達到截肢患者選擇更好假肢的目的。另外,Arifin 等[3]通過測試 10 名膝下截肢患者的假肢穿戴情況,依據能有效反映患者姿勢穩定性的平衡量表來評判他們穿戴不同假肢時的康復效果。
上述測試需要使用攝像機、測力平臺和其他方法收集動力學和運動學數據,因此獲取數據十分困難。而且人體步態的動態變化使得受試者之間缺乏可重復性,因而測試結果往往是有限的[4-5]。另外,考慮到跌倒或者絆倒存在責任和安全問題,因此在測試過程中通常需要添加安全預措施。毋庸置疑,上述人體測試耗時長、重復性差、操作繁瑣且存在責任風險,給患者帶來極大的不適的同時,也影響了假肢的研發進度[6-7],因此這些問題亟待解決。
以假肢測試平臺(機器測試)代替人體測試實驗或可有效避免上述測試耗時、重復性差等難題,對此國內外學者已經進行了大量研究。例如,Yunardi 等[8]通過相機捕捉一個腿部擺動的步態周期中腿部各關節的角度,已達到準確獲取腿部數據的效果。顯然,這種測試方式復雜且硬件成本較高,很難得到推廣和應用。另外,焦偉[9]在控制系統中制定模糊控制規則,實現了機器測試代替人體進行連續步行的效果。但是,他們的機器測試平臺只具有患側腿部的結構設計,故無法對健側腿和殘側腿的步態對稱性進行研究。同樣地,Richter 等[10]通過動態建模使得假肢測試機器人在矢狀面可以完成兩個自由度的髖關節運動,但是其只能模擬單側髖關節運動,無法進行對稱性分析。綜上所述,目前尚未建成一套成熟的下肢假體性能評價體系。因此,本工作擬提出一種可以模擬健側與患側雙下肢功能的行走測試平臺。
1 步態仿真模擬與評測系統設計
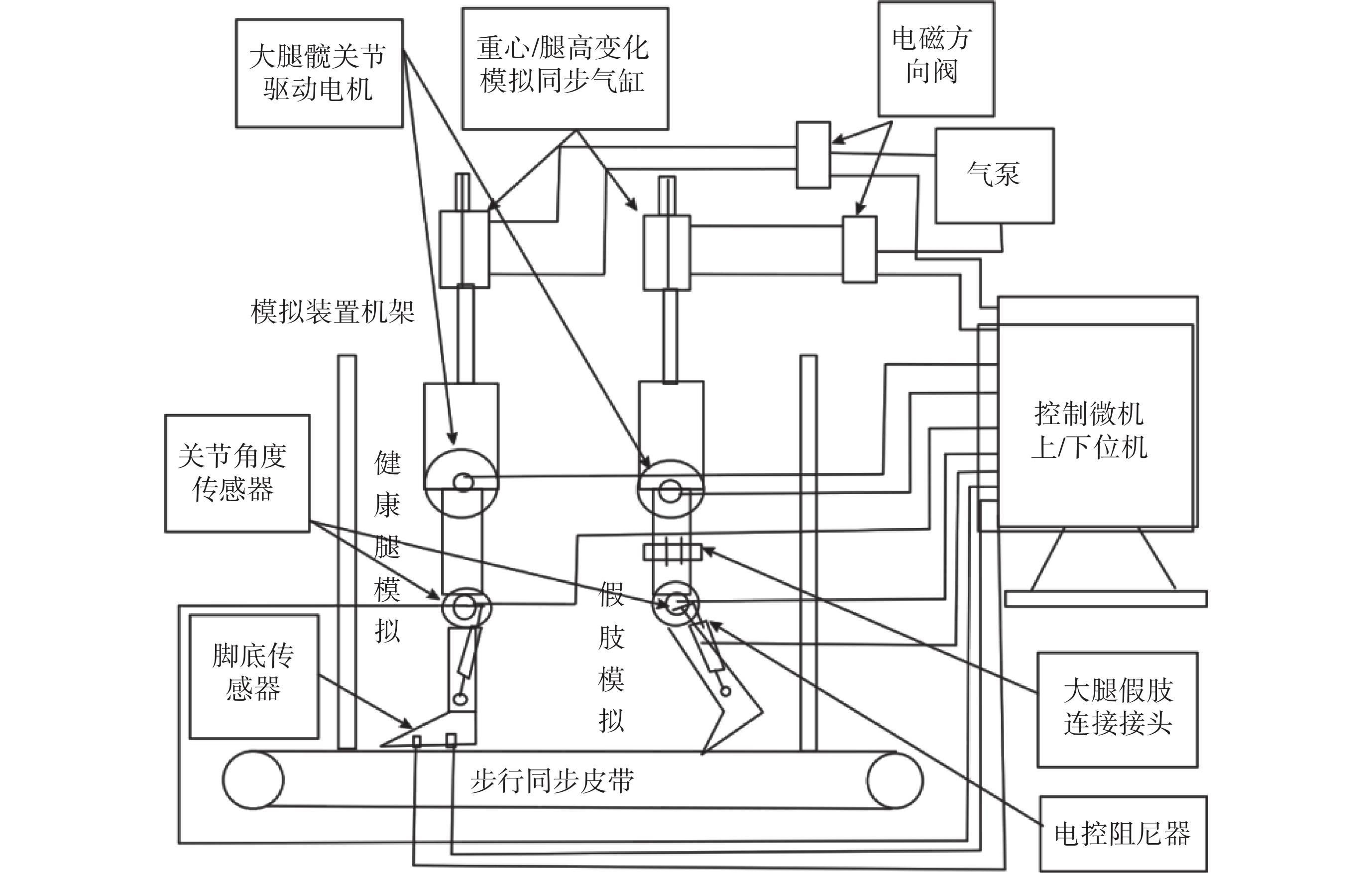
下肢假肢模擬與評測系統是為測評智能膝關節性能而設計,用以評測系統兩側下肢的結構不同。其中,一側為人工下肢,由人工髖關節和人工膝關節組成,用來模擬殘疾患者的健康側腿;另一側為仿生下肢,由人工髖關節、智能膝關節組成,用來模擬殘疾患者的患側肢體。行走不僅僅是下肢在運動,而且身體的重心會周期性地左右震蕩,所以需要對行走過程中的平衡問題進行控制[11-12],本工作采用氣缸驅動髖關節升降來模擬人體的重心變化,通過設定跑步機的速度模擬人體不同速度下的行走過程。智能下肢假體通過一個特殊的關節連接到測試系統仿生下肢側模擬器上,實現功能模擬。整個系統的設計基于仿生學原理,將人體行走過程簡化為髖關節和膝關節在二維平面內實現一個自由度的運動。其樣機設計原理圖如圖1 所示。
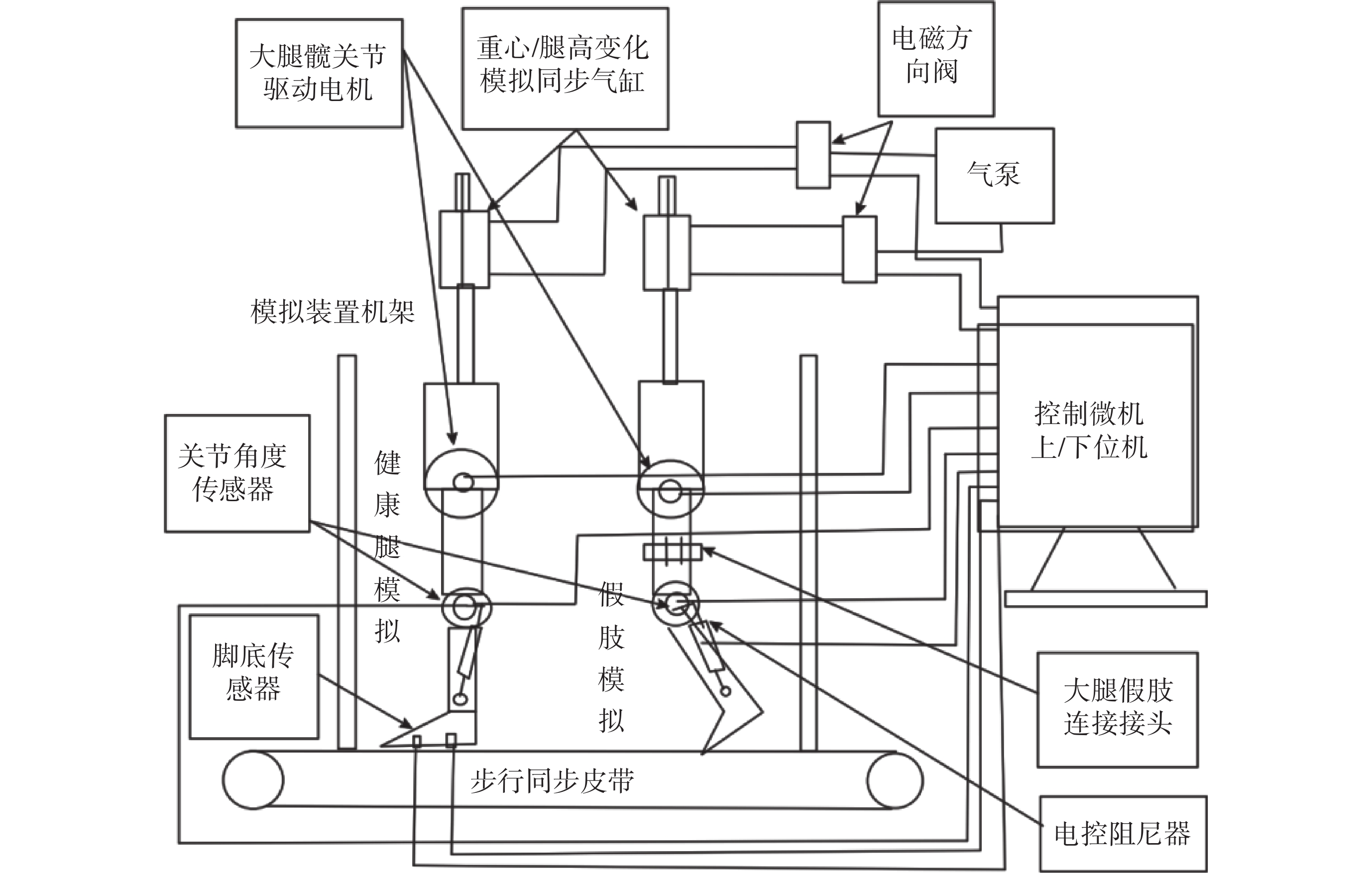 圖1
步態仿真模擬與評測系統結構原理圖
Figure1.
Schematic diagram of gait simulation and evaluation system
圖1
步態仿真模擬與評測系統結構原理圖
Figure1.
Schematic diagram of gait simulation and evaluation system
下肢假肢步態仿真模擬與評測系統包括三個步進電機,分別驅動人工下肢側髖關節和膝關節以及仿生下肢側髖關節,并通過氣缸升降模擬正常人行走過程中重心的變化,使整個系統可以在二維平面上完成步態仿真。本工作使用 86BYGH250C 的兩相混合式步進電機配合上海研藍自動化科技有限公司生產的 C5-E 驅動器來驅動相應關節的擺動。步進電機的基本步距角 1.8°,由于人體步態周期中支撐前期膝關節會有較小角度的屈伸動作,此時關節運動角度較小[13],故需減小每脈沖運轉的角度來提高電機的運轉精度。本設計通過驅動器將電機設置為 16 細分,使得電機可以低速平穩運行,通過安裝在電機上的編碼器實時檢測髖關節和膝關節在行走過程中角速度和加速度的變化。控制系統的主控芯片采用 STM32F407VGT6,實時測量模擬行走步態過程的角度時間數據,下位機通過串口將數據傳至上位機,在上位機中以文本的形式記錄步態數據,方便后期數據處理。整體控制框圖如圖2 所示。
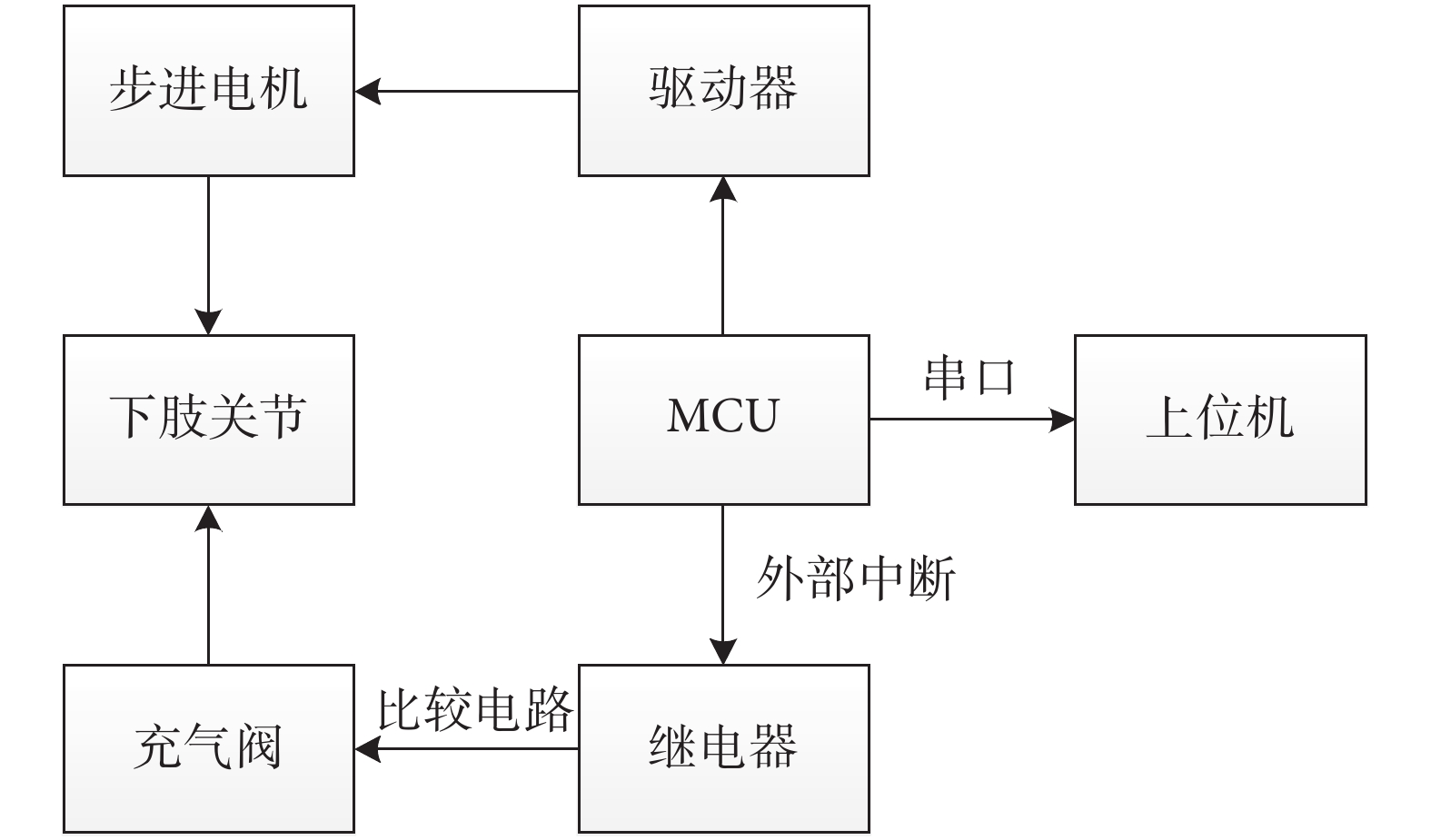 圖2
步態仿真模擬與測評系統整體控制框圖
Figure2.
Control block diagram of gait simulation and evaluation system
圖2
步態仿真模擬與測評系統整體控制框圖
Figure2.
Control block diagram of gait simulation and evaluation system
2 步態仿真模擬與步態對稱性實驗
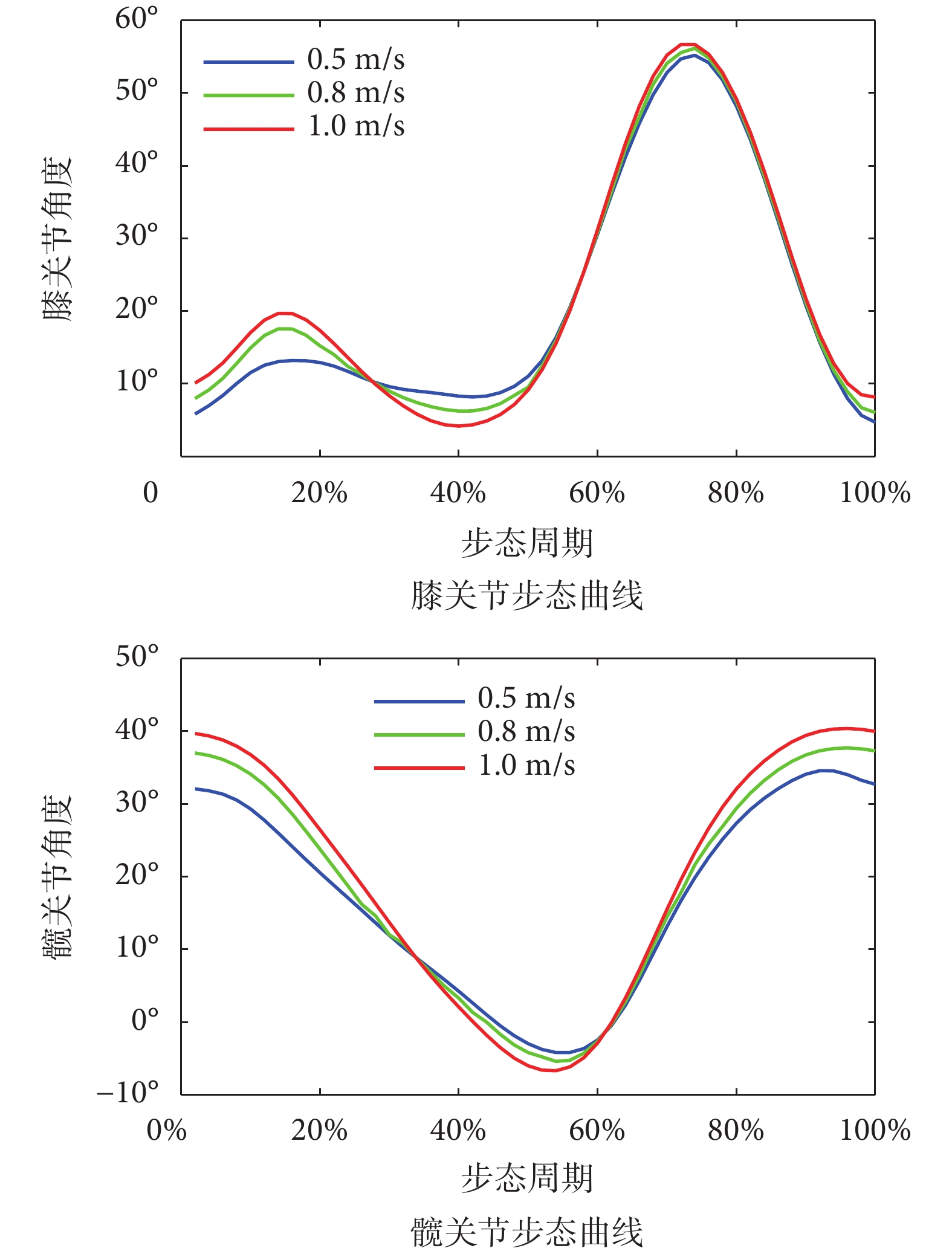
步態仿真模擬與評測系統需采集正常成年人行走步態周期的關節角度與時間數據作為控制源信號,配合驅動器形成閉環控制,分別去控制 3 個電機。本次步態數據采集實驗受試者納入標準為:①身體健康,沒有影響運動的神經性疾病;② 下肢以及足部各個關節能夠正常活動,在沒有輔助措施的情況下可以正常行走;③自愿參加實驗。本次測試由專業醫師用江蘇德長醫療科技有限公司的全身三維步態與運動分析系統,采集一位 27 歲成年男性在跑步機上分別以 0.5、0.8、1.0 m/s 的速度行走的多個步態周期的關節角度與時間數據,其中一個步態周期指的是從一側足跟著地到同側腿足跟再次著地所經歷的時間[14]。數據采集過程中存在抖動等不確定性因素,因此對每種步速下采集的數據進行多個周期取平均值處理,選取其中一個較平滑的步態數據。最終在 Matlab 中擬合人體膝關節和髖關節步態曲線,如圖3 所示。
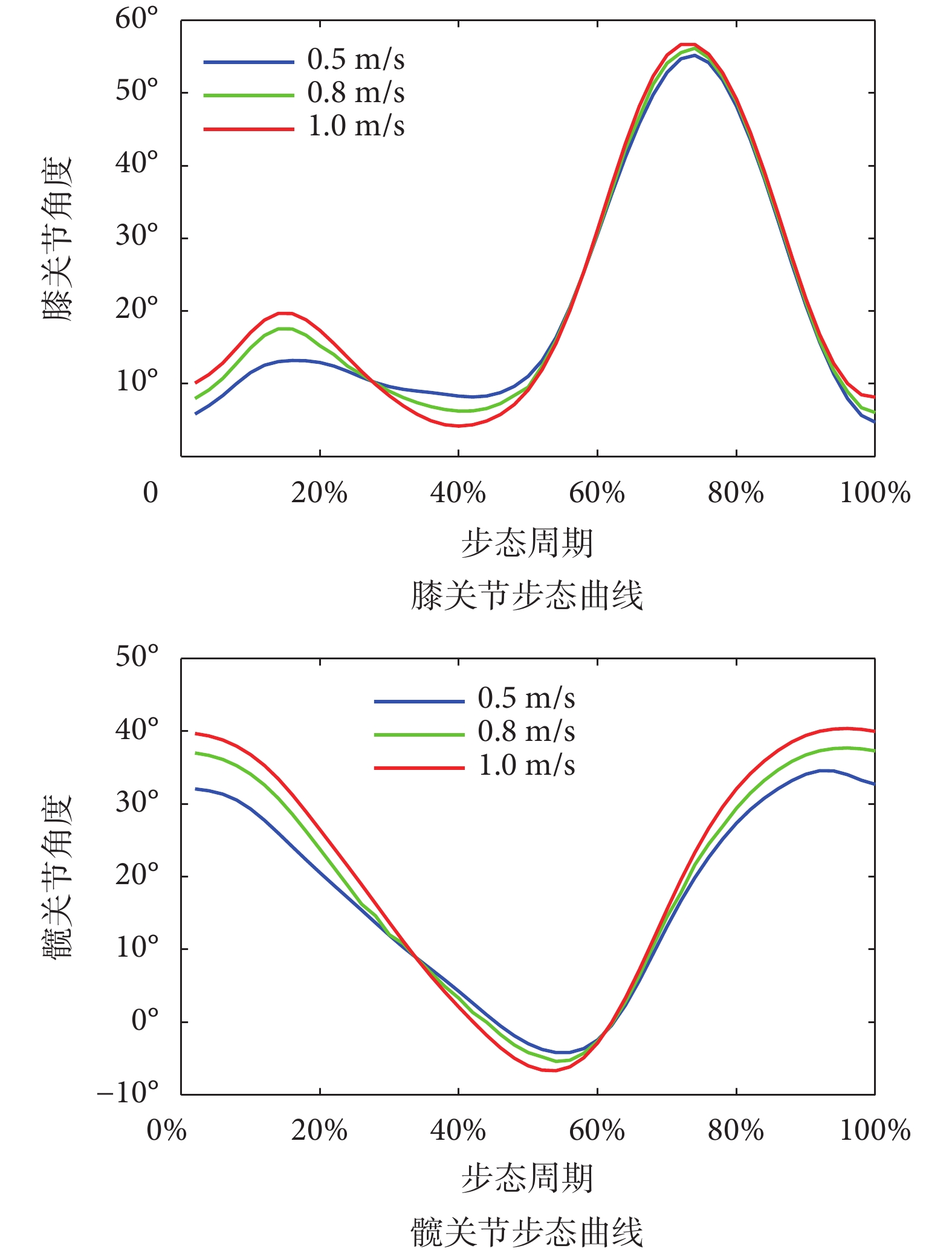 圖3
三種不同步速下的步態曲線
Figure3.
Gait curves of three different speeds
圖3
三種不同步速下的步態曲線
Figure3.
Gait curves of three different speeds
在圖3 中可以看到一個步態周期中每個時間點對應一個確定的角度,在程序中設置定時器的溢出時間,并將電機設置為同步模式,通過 CAN 總線依次發送各個關節的角度數據給相應的電機,通過電機驅動對應的關節,即可達到模擬人體行走步態的目的。
2.1 下肢假肢測試平臺步態模擬驗證測試
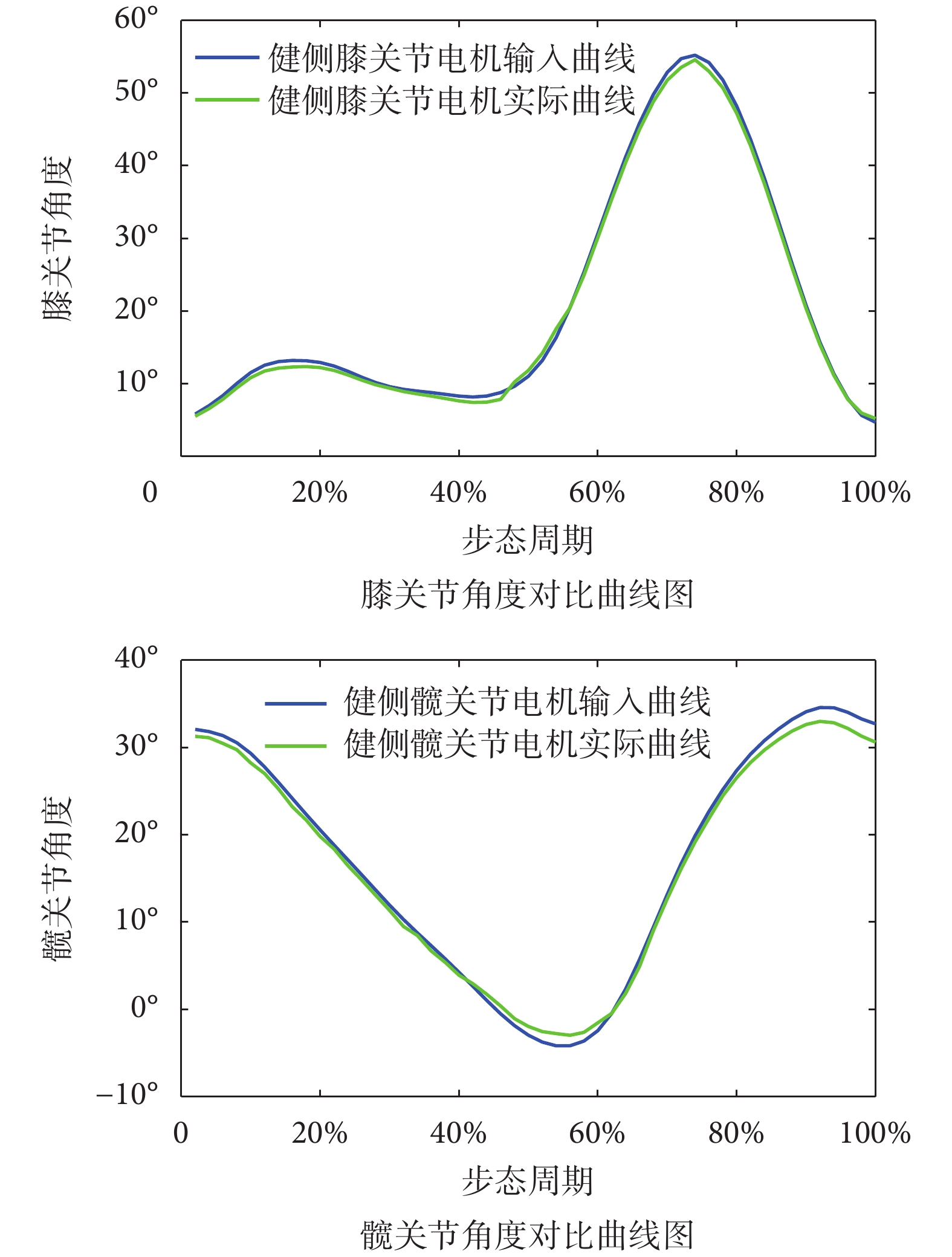
本實驗的主要目的是研究假肢測評系統模擬人體步態的近似程度。通過測評系統試驗樣機的左右髖關節與膝關節處的旋轉編碼器,采集模擬步態的輸出關節角度數據,進而與通過儀器采集得到的關節角度數據進行比較。3 種步速下關節模擬程度相似,以人工下肢側髖關節和膝關節為例,給出 0.5 m/s 步速下健側髖關節與膝關節的目標曲線與實際采集所得的關節曲線,如圖4 所示。
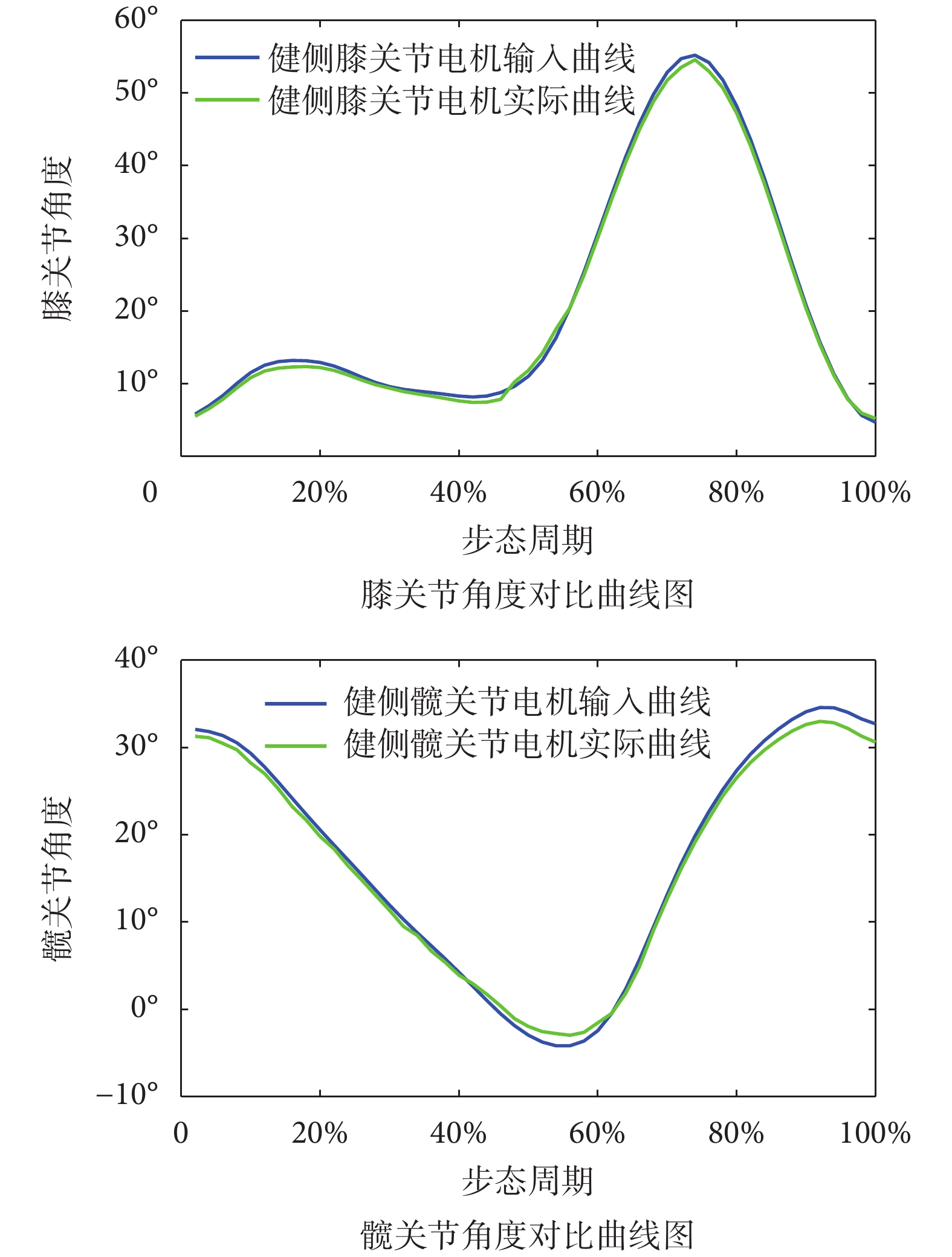 圖4
0.5 m/s 步速下輸入與輸出關節角度對比曲線圖
Figure4.
Contrasting curves of input and output joint angles at 0.5 m/s pace
圖4
0.5 m/s 步速下輸入與輸出關節角度對比曲線圖
Figure4.
Contrasting curves of input and output joint angles at 0.5 m/s pace
從圖4 可以看出實際測試曲線與目標曲線基本重合,在一個周期的步態過程中,在幅值附近達不到輸入的數據值,這是由于編碼器的反饋延遲造成的,這種誤差在工程允許范圍之內。實驗結果表明,關節輸入曲線與測試曲線的擬合度較高,說明下肢假肢測試平臺可以較好地模擬人體步態。
2.2 智能膝關節假肢機器測試
文獻[15]中根據左右側對稱性步態參數提出三個對稱性指標,表達式如下:
 |
 |
 |
式中XL和XR分別代表左右側肢體的步態特征參數,本工作中,XR代表仿生下肢的步態實驗數據,XL代表人工下肢步態實驗數據。在式(1)中,SI = 0 時表示完全對稱;式(2)中,RI = 1 表示完全對稱;式(3)中,RII = 0 表示完全對稱,其中正負號表示肢體的主導地位。基于測試平臺的硬件設備,本文中步態特征參數為步幅和最小膝關節角度。
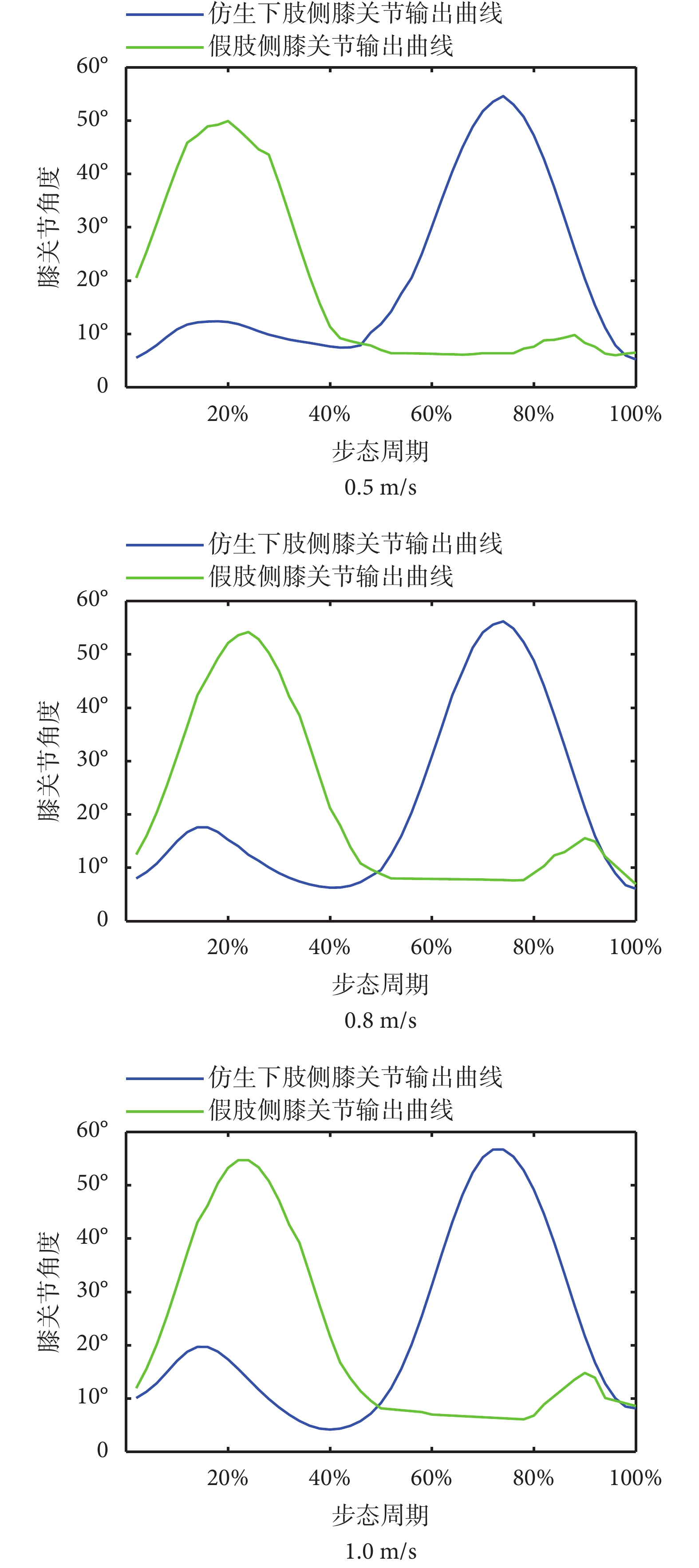
在 2.1 節評測系統步態模擬實驗中已經驗證了本系統模擬步態的可行性與準確性。本實驗用已經研發的智能膝關節假肢,通過特殊的接口穿戴在假肢測評系統的仿生下肢側[16]。將膝關節裝載在測試平臺仿生腿側,啟動測試平臺,控制跑步機分別以 0.5、0.8、1.0 m/s 三種不同步速進行測試。通過智能膝關節控制系統搭載的角度傳感器實時測量膝關節角度,并將相應的步態數據上傳至上位機。通過觀察不同步速下膝關節自動調整開度從而適應相應的步態的效果,評測膝關節的好壞。三種步速下,兩側膝關節的步態數據曲線如圖5 所示。結合上述步態對稱準則,可計算步態周期以及步態特征參數如步幅、最小膝關節角度,步態對稱量化結果如表1 所示。
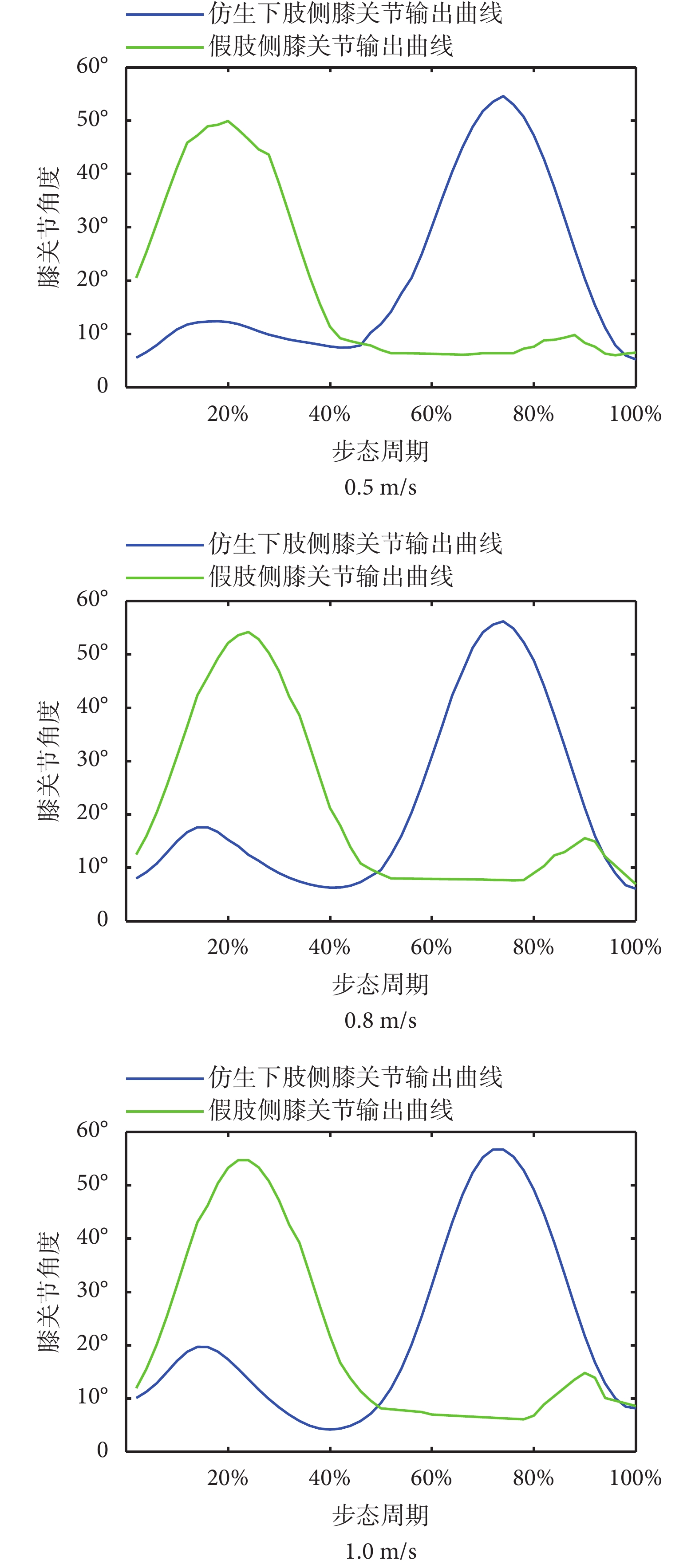 圖5
三種不同步速下人工下肢側膝關節與仿生下肢側膝關 節輸出曲線圖
Figure5.
Output curves of knee joint of artificial lower limb and bionic lower limb with three different speeds
圖5
三種不同步速下人工下肢側膝關節與仿生下肢側膝關 節輸出曲線圖
Figure5.
Output curves of knee joint of artificial lower limb and bionic lower limb with three different speeds
由圖5 可知,在不同步速下,裝載所研發膝關節的步態曲線具有預屈曲過程,且對應曲線段較為平緩;表明裝載所研發膝關節預屈曲角度小于正常步態。這是因為患者實際佩戴假肢膝關節時,義肢和截肢者的不同動作方式、認知能力和動態特性,以及兩者之間的運動協調差異等,都會導致站立相預屈曲角度過小。另外,針對每一種步速下的步態曲線,人工下肢側與仿生下肢側的膝關節曲線整體變化趨勢相同,兩者相位上相差半個步態周期;并且仿生下肢側的擺動相與人工下肢側擺動相之間吻合得較好,而兩者之間的站立相則吻合較差(站立相包含預屈曲過程)。針對三種不同步速下的步態曲線,人工下肢側與仿生下肢側的曲線并無太多變化。
根據表1 可以得到以下結果。針對步幅的對稱性指標,與 0 相比仿生下肢側的 SI 和 RII 偏差略大于人工下肢(1.07%~2.03%)。另外,不同步速下兩側步幅的 SI 和 RII 偏差小于 2.03%;而 RI 逼近 1(1.02~1.07)。這些結果表明兩側步幅差異較小且均在正常范圍內。針對最小膝關節角度,當步速為 0.5 m/s 時,對稱性指標 SI、RII 均大于 0,表明與仿生下肢側相比,人工下肢側的最小膝關節角度偏差較大。而當步速大于 0.8 m/s 時,SI、RII 均小于 0,表明與人工下肢側相比,仿生下肢側的最小膝關節角度偏差較大。基于本文研究,隨著步速的增大,人工下肢側和仿生下肢側的 SI、RII 的絕對值在增大,RI 越來越遠離 1,表明步速變大時,對稱性變弱,這與現實情況是相符的。
綜上所述,本工作所研發的步態測評系統可以較好地模擬殘疾患者佩戴假肢膝關節時的狀態,定量評價假肢的步態對稱性。
3 討論和結論
相對于東南大學焦偉[9]提出的的只具有模擬腿結構的測試平臺,本文所提出的機器測試平臺通過增設人工下肢,與仿生下肢的步態數據進行對比,可以更好地評價和測試膝關節的性能。相對于 Yunardi 等[8]通過相機捕捉數據的方法,本設計采用角度編碼器獲取各個關節角度,大大節省了成本。相對于 Richter 等[10]只能模擬單側髖關節運動的測試平臺,本設計具有雙側髖關節的結構設計,可以對健側腿和殘側腿的步態進行對稱性分析。
本文根據步態采集儀器采集正常成年人的步態特征數據,然后提取人體步態軌跡曲線,通過電機帶動假肢測評系統的關節運動。將通過采集測試系統得到的相應的關節角度曲線與通過儀器采集的步態曲線進行對比,驗證了測試平臺的可行性。然后在假肢測評系統仿生腿側戴上研制的智能膝關節,通過上位機將采集的步態數據記錄下來,結合步態對稱評估標準,進行了定量的步態對稱性分析。假肢測試平臺可以很好地帶動已經研發的膝關節進行步態測試,通過分析測試采集所得的步態數據,可以促進膝關節的研發。
本實驗只是基于水平面的步態評測,后續可以將不同的路況環境加入假肢步態測評系統,從而可以更加完善地去測評假肢膝關節的性能,更好地促進膝關節的研發。
利益沖突聲明:本文全體作者均聲明不存在利益沖突。
引言
智能假肢研發過程中,為了測試假肢性能的好壞,需要殘疾志愿者配合做大量的測試實驗。國外學者對此報道過很多相關的研究。例如,Ko 等[1]通過測試三名成年男性截肢患者足踝關節的能量存儲和恢復情況,判定他們穿戴不同假肢踝關節的生物力學特征。類似地,Raschke 等[2]通過記錄 11 例創傷性截肢患者七天時間內穿戴假肢的磨損程度,分析不同假肢的生物力學特性,評估相應假肢的性能,以達到截肢患者選擇更好假肢的目的。另外,Arifin 等[3]通過測試 10 名膝下截肢患者的假肢穿戴情況,依據能有效反映患者姿勢穩定性的平衡量表來評判他們穿戴不同假肢時的康復效果。
上述測試需要使用攝像機、測力平臺和其他方法收集動力學和運動學數據,因此獲取數據十分困難。而且人體步態的動態變化使得受試者之間缺乏可重復性,因而測試結果往往是有限的[4-5]。另外,考慮到跌倒或者絆倒存在責任和安全問題,因此在測試過程中通常需要添加安全預措施。毋庸置疑,上述人體測試耗時長、重復性差、操作繁瑣且存在責任風險,給患者帶來極大的不適的同時,也影響了假肢的研發進度[6-7],因此這些問題亟待解決。
以假肢測試平臺(機器測試)代替人體測試實驗或可有效避免上述測試耗時、重復性差等難題,對此國內外學者已經進行了大量研究。例如,Yunardi 等[8]通過相機捕捉一個腿部擺動的步態周期中腿部各關節的角度,已達到準確獲取腿部數據的效果。顯然,這種測試方式復雜且硬件成本較高,很難得到推廣和應用。另外,焦偉[9]在控制系統中制定模糊控制規則,實現了機器測試代替人體進行連續步行的效果。但是,他們的機器測試平臺只具有患側腿部的結構設計,故無法對健側腿和殘側腿的步態對稱性進行研究。同樣地,Richter 等[10]通過動態建模使得假肢測試機器人在矢狀面可以完成兩個自由度的髖關節運動,但是其只能模擬單側髖關節運動,無法進行對稱性分析。綜上所述,目前尚未建成一套成熟的下肢假體性能評價體系。因此,本工作擬提出一種可以模擬健側與患側雙下肢功能的行走測試平臺。
1 步態仿真模擬與評測系統設計
下肢假肢模擬與評測系統是為測評智能膝關節性能而設計,用以評測系統兩側下肢的結構不同。其中,一側為人工下肢,由人工髖關節和人工膝關節組成,用來模擬殘疾患者的健康側腿;另一側為仿生下肢,由人工髖關節、智能膝關節組成,用來模擬殘疾患者的患側肢體。行走不僅僅是下肢在運動,而且身體的重心會周期性地左右震蕩,所以需要對行走過程中的平衡問題進行控制[11-12],本工作采用氣缸驅動髖關節升降來模擬人體的重心變化,通過設定跑步機的速度模擬人體不同速度下的行走過程。智能下肢假體通過一個特殊的關節連接到測試系統仿生下肢側模擬器上,實現功能模擬。整個系統的設計基于仿生學原理,將人體行走過程簡化為髖關節和膝關節在二維平面內實現一個自由度的運動。其樣機設計原理圖如圖1 所示。
圖1
步態仿真模擬與評測系統結構原理圖
Figure1.
Schematic diagram of gait simulation and evaluation system
下肢假肢步態仿真模擬與評測系統包括三個步進電機,分別驅動人工下肢側髖關節和膝關節以及仿生下肢側髖關節,并通過氣缸升降模擬正常人行走過程中重心的變化,使整個系統可以在二維平面上完成步態仿真。本工作使用 86BYGH250C 的兩相混合式步進電機配合上海研藍自動化科技有限公司生產的 C5-E 驅動器來驅動相應關節的擺動。步進電機的基本步距角 1.8°,由于人體步態周期中支撐前期膝關節會有較小角度的屈伸動作,此時關節運動角度較小[13],故需減小每脈沖運轉的角度來提高電機的運轉精度。本設計通過驅動器將電機設置為 16 細分,使得電機可以低速平穩運行,通過安裝在電機上的編碼器實時檢測髖關節和膝關節在行走過程中角速度和加速度的變化。控制系統的主控芯片采用 STM32F407VGT6,實時測量模擬行走步態過程的角度時間數據,下位機通過串口將數據傳至上位機,在上位機中以文本的形式記錄步態數據,方便后期數據處理。整體控制框圖如圖2 所示。
圖2
步態仿真模擬與測評系統整體控制框圖
Figure2.
Control block diagram of gait simulation and evaluation system
2 步態仿真模擬與步態對稱性實驗
步態仿真模擬與評測系統需采集正常成年人行走步態周期的關節角度與時間數據作為控制源信號,配合驅動器形成閉環控制,分別去控制 3 個電機。本次步態數據采集實驗受試者納入標準為:①身體健康,沒有影響運動的神經性疾病;② 下肢以及足部各個關節能夠正常活動,在沒有輔助措施的情況下可以正常行走;③自愿參加實驗。本次測試由專業醫師用江蘇德長醫療科技有限公司的全身三維步態與運動分析系統,采集一位 27 歲成年男性在跑步機上分別以 0.5、0.8、1.0 m/s 的速度行走的多個步態周期的關節角度與時間數據,其中一個步態周期指的是從一側足跟著地到同側腿足跟再次著地所經歷的時間[14]。數據采集過程中存在抖動等不確定性因素,因此對每種步速下采集的數據進行多個周期取平均值處理,選取其中一個較平滑的步態數據。最終在 Matlab 中擬合人體膝關節和髖關節步態曲線,如圖3 所示。
圖3
三種不同步速下的步態曲線
Figure3.
Gait curves of three different speeds
在圖3 中可以看到一個步態周期中每個時間點對應一個確定的角度,在程序中設置定時器的溢出時間,并將電機設置為同步模式,通過 CAN 總線依次發送各個關節的角度數據給相應的電機,通過電機驅動對應的關節,即可達到模擬人體行走步態的目的。
2.1 下肢假肢測試平臺步態模擬驗證測試
本實驗的主要目的是研究假肢測評系統模擬人體步態的近似程度。通過測評系統試驗樣機的左右髖關節與膝關節處的旋轉編碼器,采集模擬步態的輸出關節角度數據,進而與通過儀器采集得到的關節角度數據進行比較。3 種步速下關節模擬程度相似,以人工下肢側髖關節和膝關節為例,給出 0.5 m/s 步速下健側髖關節與膝關節的目標曲線與實際采集所得的關節曲線,如圖4 所示。
圖4
0.5 m/s 步速下輸入與輸出關節角度對比曲線圖
Figure4.
Contrasting curves of input and output joint angles at 0.5 m/s pace
從圖4 可以看出實際測試曲線與目標曲線基本重合,在一個周期的步態過程中,在幅值附近達不到輸入的數據值,這是由于編碼器的反饋延遲造成的,這種誤差在工程允許范圍之內。實驗結果表明,關節輸入曲線與測試曲線的擬合度較高,說明下肢假肢測試平臺可以較好地模擬人體步態。
2.2 智能膝關節假肢機器測試
文獻[15]中根據左右側對稱性步態參數提出三個對稱性指標,表達式如下:
|
|
|
式中XL和XR分別代表左右側肢體的步態特征參數,本工作中,XR代表仿生下肢的步態實驗數據,XL代表人工下肢步態實驗數據。在式(1)中,SI = 0 時表示完全對稱;式(2)中,RI = 1 表示完全對稱;式(3)中,RII = 0 表示完全對稱,其中正負號表示肢體的主導地位。基于測試平臺的硬件設備,本文中步態特征參數為步幅和最小膝關節角度。
在 2.1 節評測系統步態模擬實驗中已經驗證了本系統模擬步態的可行性與準確性。本實驗用已經研發的智能膝關節假肢,通過特殊的接口穿戴在假肢測評系統的仿生下肢側[16]。將膝關節裝載在測試平臺仿生腿側,啟動測試平臺,控制跑步機分別以 0.5、0.8、1.0 m/s 三種不同步速進行測試。通過智能膝關節控制系統搭載的角度傳感器實時測量膝關節角度,并將相應的步態數據上傳至上位機。通過觀察不同步速下膝關節自動調整開度從而適應相應的步態的效果,評測膝關節的好壞。三種步速下,兩側膝關節的步態數據曲線如圖5 所示。結合上述步態對稱準則,可計算步態周期以及步態特征參數如步幅、最小膝關節角度,步態對稱量化結果如表1 所示。
圖5
三種不同步速下人工下肢側膝關節與仿生下肢側膝關 節輸出曲線圖
Figure5.
Output curves of knee joint of artificial lower limb and bionic lower limb with three different speeds
由圖5 可知,在不同步速下,裝載所研發膝關節的步態曲線具有預屈曲過程,且對應曲線段較為平緩;表明裝載所研發膝關節預屈曲角度小于正常步態。這是因為患者實際佩戴假肢膝關節時,義肢和截肢者的不同動作方式、認知能力和動態特性,以及兩者之間的運動協調差異等,都會導致站立相預屈曲角度過小。另外,針對每一種步速下的步態曲線,人工下肢側與仿生下肢側的膝關節曲線整體變化趨勢相同,兩者相位上相差半個步態周期;并且仿生下肢側的擺動相與人工下肢側擺動相之間吻合得較好,而兩者之間的站立相則吻合較差(站立相包含預屈曲過程)。針對三種不同步速下的步態曲線,人工下肢側與仿生下肢側的曲線并無太多變化。
根據表1 可以得到以下結果。針對步幅的對稱性指標,與 0 相比仿生下肢側的 SI 和 RII 偏差略大于人工下肢(1.07%~2.03%)。另外,不同步速下兩側步幅的 SI 和 RII 偏差小于 2.03%;而 RI 逼近 1(1.02~1.07)。這些結果表明兩側步幅差異較小且均在正常范圍內。針對最小膝關節角度,當步速為 0.5 m/s 時,對稱性指標 SI、RII 均大于 0,表明與仿生下肢側相比,人工下肢側的最小膝關節角度偏差較大。而當步速大于 0.8 m/s 時,SI、RII 均小于 0,表明與人工下肢側相比,仿生下肢側的最小膝關節角度偏差較大。基于本文研究,隨著步速的增大,人工下肢側和仿生下肢側的 SI、RII 的絕對值在增大,RI 越來越遠離 1,表明步速變大時,對稱性變弱,這與現實情況是相符的。
綜上所述,本工作所研發的步態測評系統可以較好地模擬殘疾患者佩戴假肢膝關節時的狀態,定量評價假肢的步態對稱性。
3 討論和結論
相對于東南大學焦偉[9]提出的的只具有模擬腿結構的測試平臺,本文所提出的機器測試平臺通過增設人工下肢,與仿生下肢的步態數據進行對比,可以更好地評價和測試膝關節的性能。相對于 Yunardi 等[8]通過相機捕捉數據的方法,本設計采用角度編碼器獲取各個關節角度,大大節省了成本。相對于 Richter 等[10]只能模擬單側髖關節運動的測試平臺,本設計具有雙側髖關節的結構設計,可以對健側腿和殘側腿的步態進行對稱性分析。
本文根據步態采集儀器采集正常成年人的步態特征數據,然后提取人體步態軌跡曲線,通過電機帶動假肢測評系統的關節運動。將通過采集測試系統得到的相應的關節角度曲線與通過儀器采集的步態曲線進行對比,驗證了測試平臺的可行性。然后在假肢測評系統仿生腿側戴上研制的智能膝關節,通過上位機將采集的步態數據記錄下來,結合步態對稱評估標準,進行了定量的步態對稱性分析。假肢測試平臺可以很好地帶動已經研發的膝關節進行步態測試,通過分析測試采集所得的步態數據,可以促進膝關節的研發。
本實驗只是基于水平面的步態評測,后續可以將不同的路況環境加入假肢步態測評系統,從而可以更加完善地去測評假肢膝關節的性能,更好地促進膝關節的研發。
利益沖突聲明:本文全體作者均聲明不存在利益沖突。