為減小在高負重的情況下穿戴下肢外骨骼時足部與地面接觸產生的沖擊,本文設計了一種用于提高足部舒適性的外骨骼足部機構,并對其影響舒適性的關鍵指標進行了優化。首先,本文基于步態周期的足底受力特點建立了足部機構物理模型,進而抽象出振動數學模型,并用有限元分析軟件 ANSYS 仿真驗證了模型的正確性。然后,本文基于振動數學模型分析了振動參數對絕對傳遞率的影響,并用數學計算軟件 MATLAB 遺傳算法工具箱優化振動參數。最后,本文以白噪聲模擬路面高程作為振動輸入,利用 MATLAB 中的可視化仿真工具 Simulink 并結合振動方程構建加速度仿真模型,進而計算足部的振動加權均方根加速度值。研究結果表明,該足部舒適性機構能夠滿足減振性與足底壓力的舒適性指標。本文為外骨骼足部機構的設計提供了一套較為完整的設計方法,對于其他外骨骼的足部設計以及踝關節康復機構的設計具有借鑒意義。
引用本文: 欒益鵬, 張建軍, 戚開誠, 楊高煒. 下肢外骨骼的新型足部機構舒適性優化. 生物醫學工程學雜志, 2020, 37(2): 324-333. doi: 10.7507/1001-5515.201908045 復制
版權信息: ?四川大學華西醫院華西期刊社《生物醫學工程學雜志》版權所有,未經授權不得轉載、改編
引言
穿戴型下肢外骨骼是一種人體助力裝備,有助于降低負重、攀爬及重物搬運等作業的勞動強度,對于提高工作效率具有重要意義[1-3]。在穿戴該裝備工作過程中,人體足部不可避免地承受來自地面的沖擊。而這種沖擊在劇烈運動時可達人體自重的 5 倍,因而會造成足部疲憊,降低使用舒適性,進而影響工作效率;另一方面,過度的沖擊會損害人體脊柱和大腦,影響作業人員健康。因此,有必要研究一種用于外骨骼的足部機構來提高行走過程中的舒適性,以緩解沖擊帶來的影響。
然而,針對足部機構舒適性的深入研究,在國內外文獻中相對少見,且考慮因素較為局限,如伯克利下肢外骨骼 Bleex 的足部傳感系統[4],僅在足部添加橡膠墊,未涉及足部的舒適性研究[5-6]。另一個系列的荷蘭特文特大學 MINDWALKER 外骨骼與佛羅里達人類和機器認知研究所的 Mina 外骨骼,則直接將鞋子連接在踝關節,未考慮舒適性與減振性[7-8]。國內研究中,海軍航空學院研制的能量輔助骨骼服,通過在足部設置壓力傳感器來檢測步態信息[9];哈爾濱工業大學研制成功一款下肢助力外骨骼機器人[10],這兩款外骨骼足部機構的局限性在于其結構均較為簡單,也未涉及到足部的舒適性研究。
為改善上述研究的局限,本文在一種無驅動耦合雙支鏈外骨骼的基礎上,提出了一種足部機構,該機構優勢在于通過減小在穿戴外骨骼時足部所受到的沖擊以提高足部舒適性。由文獻[11]可知,減小足底傳入的振動可以提高足部舒適性。本機構通過 2 階減振系統可以減小足底的沖擊,將傳入足底的加速度減小;且根據 GB/T13441.1-2007/ISO22631-1:1997《機械振動與沖擊-人體暴露于全身振動的評價》[12]與外骨骼的助力性,將振動加權均方根加速度值控制在 0.05~0.315 m/s2以內作為舒適性約束條件,由壓力鞋墊來控制足部的壓力閾值,再由文獻[13]可知,足部舒適性設計需要將步態足底壓力值進一步縮小到 56 kPa,以滿足人體舒適性。通過上述方法,本文為外骨骼足部機構的設計提供了一套較為完整的設計方法,對于其他外骨骼的足部設計以及踝關節康復機構的設計具有借鑒意義。
1 外骨骼足部機構的設計
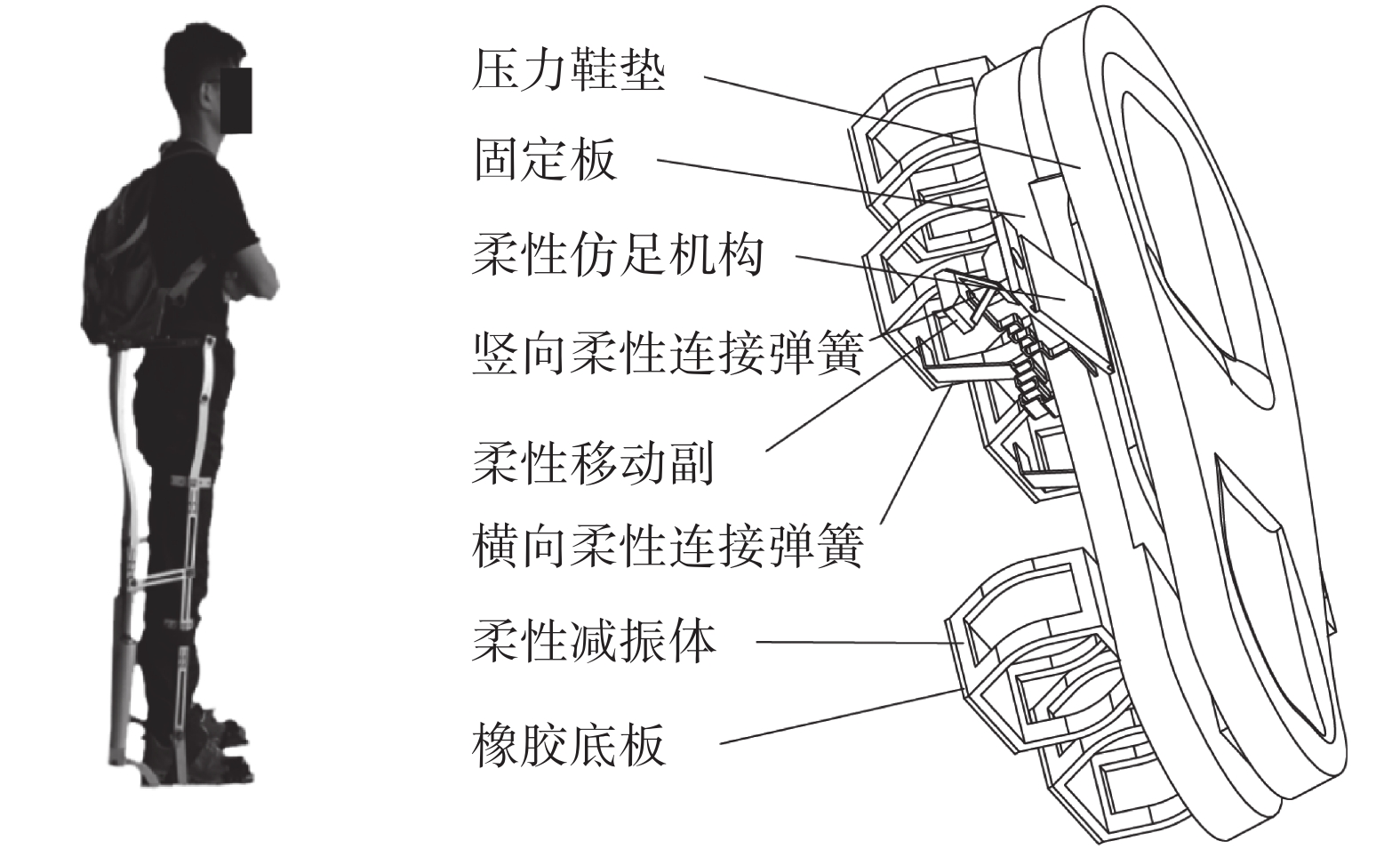
張建軍等[14]提出一種含耦合雙支閉鏈機構的無驅動下肢外骨骼,如圖 1 左側所示。該外骨骼具備承載能力高、無續航時間限制、人機匹配度較高的優點。但是在設計該外骨骼時,足部機構僅實現了支撐與連接功能,未深入考慮足部舒適性問題,因此本文重點關注的是足部機構的舒適性設計,主要考慮減振性與足底壓力兩個因素。基于減振性能分析[15-16],結合行走過程中足部受力情況,本文確定需以 2 自由度的有阻尼振動系統對足部機構進行設計,進而得到足部機構模型,如圖 1 右側所示,其中足底壓力需要用壓力鞋墊來控制,柔性仿足機構簡化成上部彈簧,固定板添加阻尼材料可簡化成阻尼,柔性減振體簡化成下部彈簧,整體足部機構能夠具備減振效果,提高穿戴外骨骼時的使用舒適性。
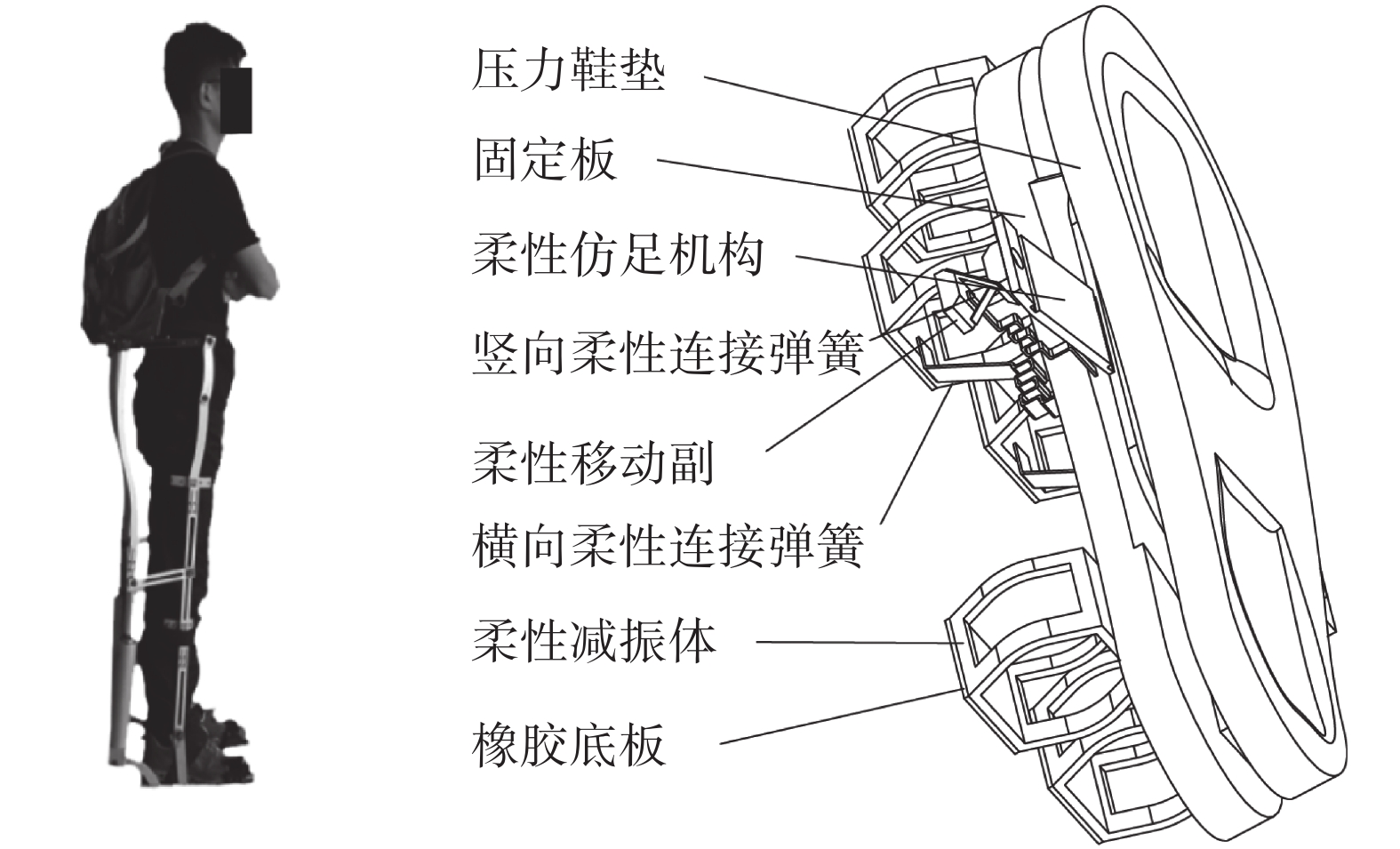 圖1
外骨骼與足部結構
Figure1.
Exoskeleton and foot structure
圖1
外骨骼與足部結構
Figure1.
Exoskeleton and foot structure
本文基于 2 自由度的有阻尼振動系統所設計出的外骨骼足部機構,將進行以下研究:首先根據步態周期足部受力特點,建立不同步態下的振動模型并驗證振動模型的正確性;然后計算振動參數 (外骨骼足部機構的質量 m1,外骨骼足部機構固定板添加的阻尼 c,柔性仿足機構的剛度 k2,柔性減振體的剛度 k1) 對絕對傳遞率的影響并確定約束條件;最后應用數學計算軟件 MATLAB R2014a(MathWorks Inc,美國)的遺傳算法工具箱函數優化振動參數,并驗證振動模型的舒適性。
2 振動模型的建立
2.1 足部受力情況分析
減振性能的分析需要簡化出振動模型,而建立的振動模型需要考慮人體步態周期中的足底受力情況。人體在行走過程中,步態周期是指足跟著地到同側足跟再次著地所經歷的時間[17-18]。一個步態周期又可分為站立時相和擺動時相,擺動時相為足尖離地到足跟著地的時間,站立時相即為足跟著地到足尖離地的時間,在站立時相足底受力如圖 2 所示。
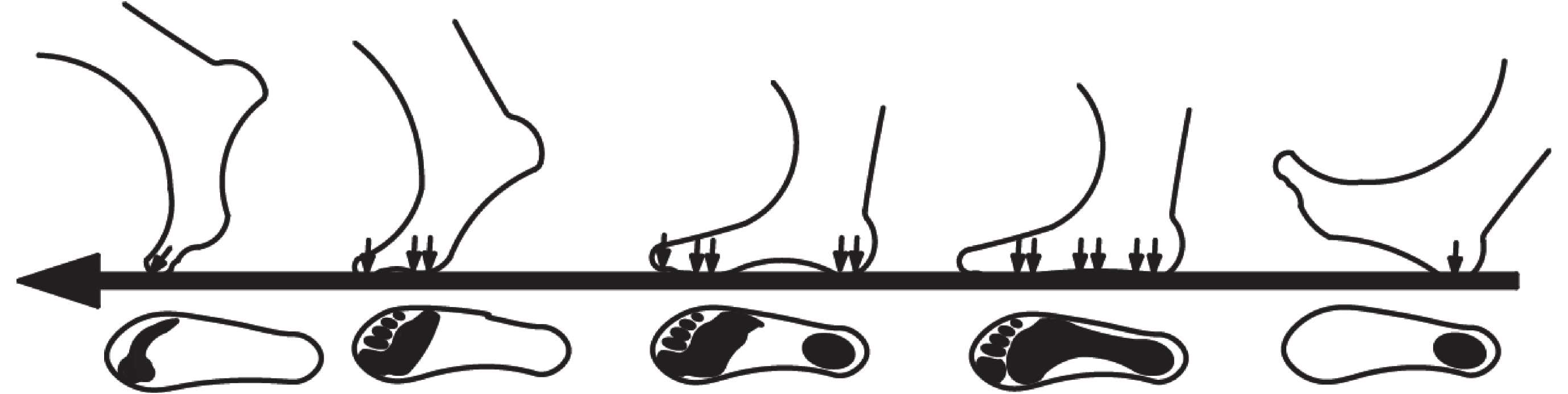 圖2
人在正常行走時的足部受力變化過程
Figure2.
Change process of foot stress during normal walking
圖2
人在正常行走時的足部受力變化過程
Figure2.
Change process of foot stress during normal walking
2.2 振動模型的建立
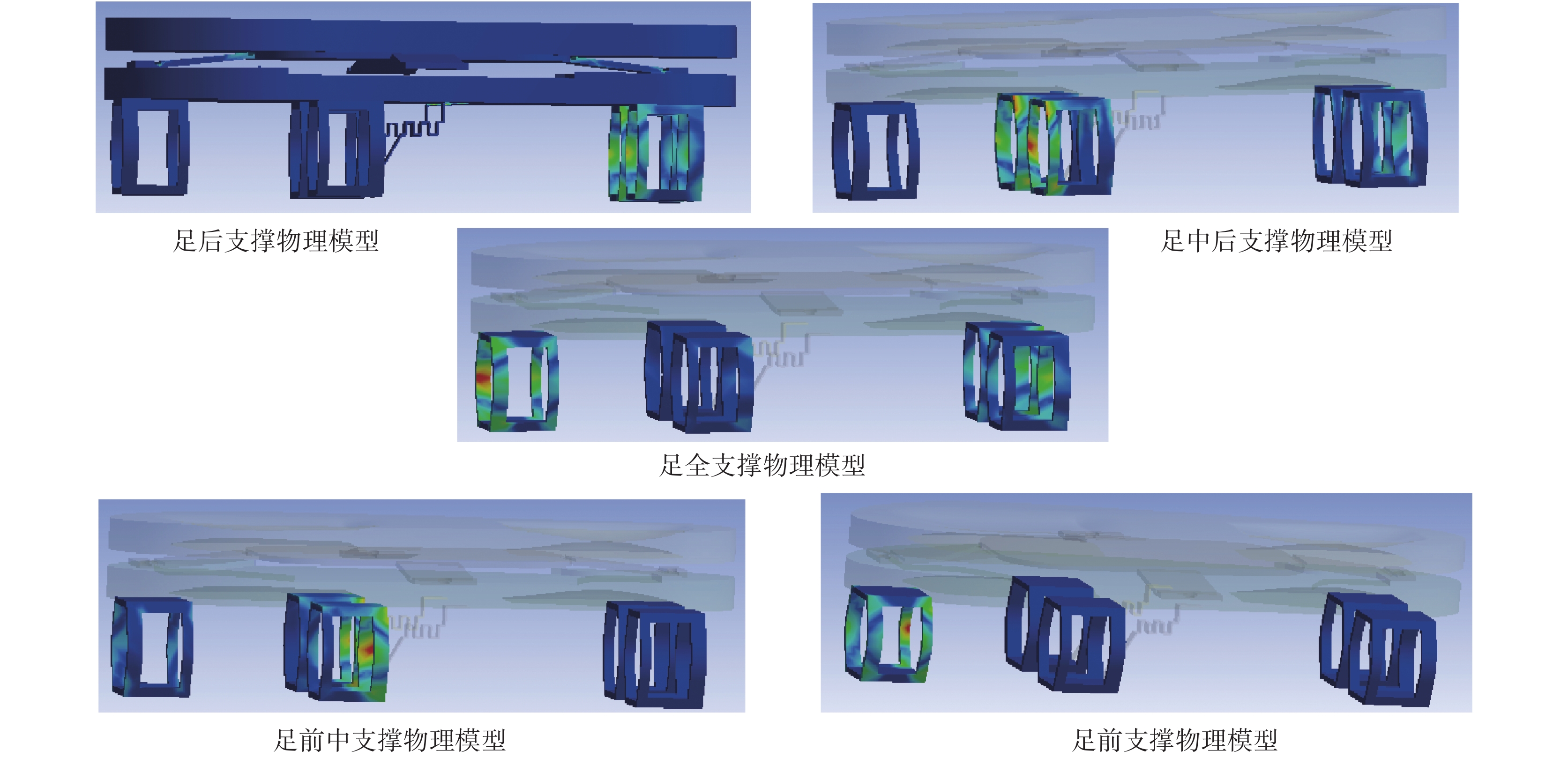
根據站立時相的受力特點,本文將外骨骼足部機構受力劃分為 5 個階段,外骨骼足部機構相對應的物理模型受力如圖 3 所示,根據物理模型得到相應的如圖 4 所示的振動模型。
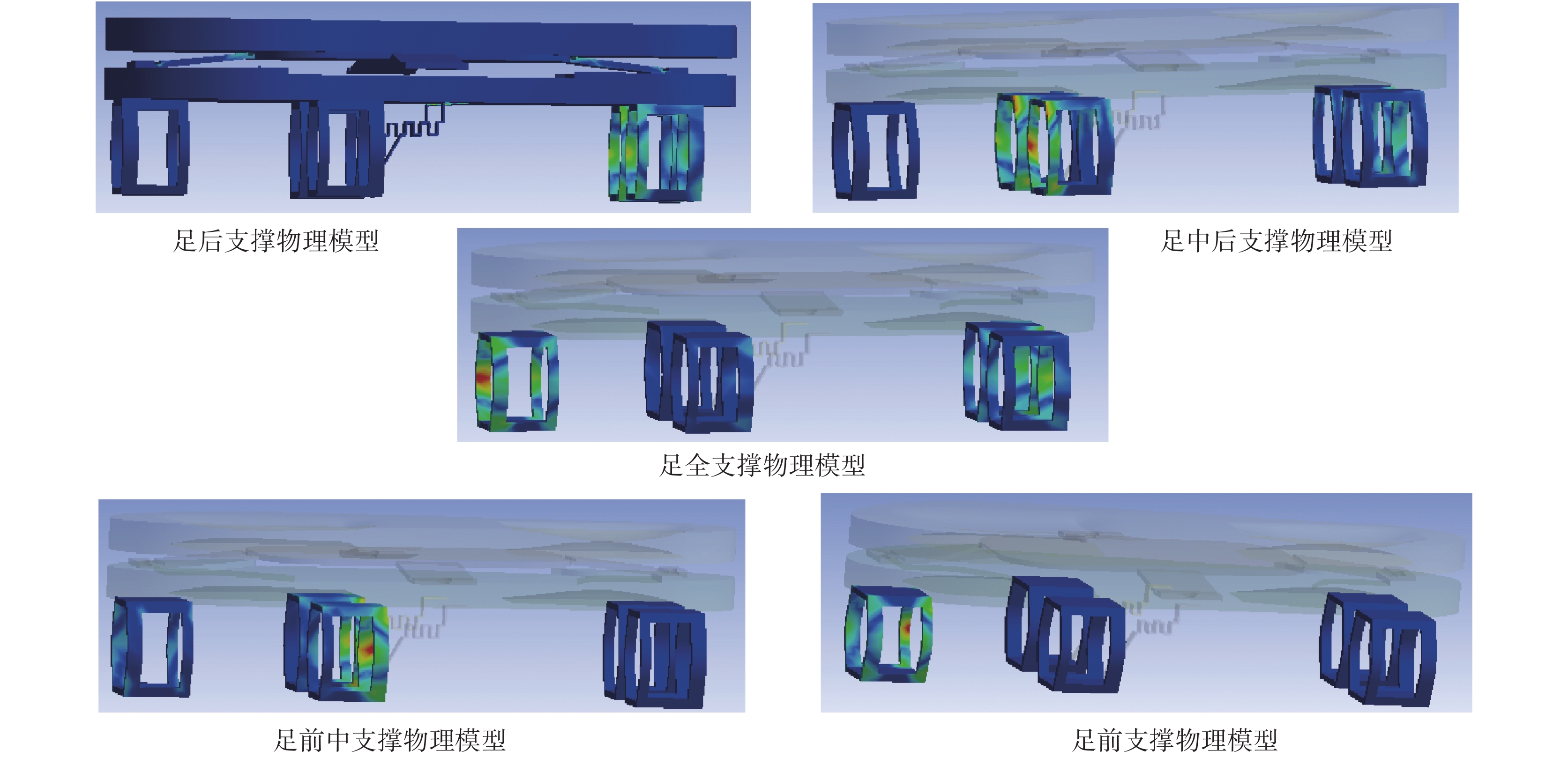 圖3
各支撐相的物理模型
Figure3.
Physical model of each supporting phase
圖3
各支撐相的物理模型
Figure3.
Physical model of each supporting phase
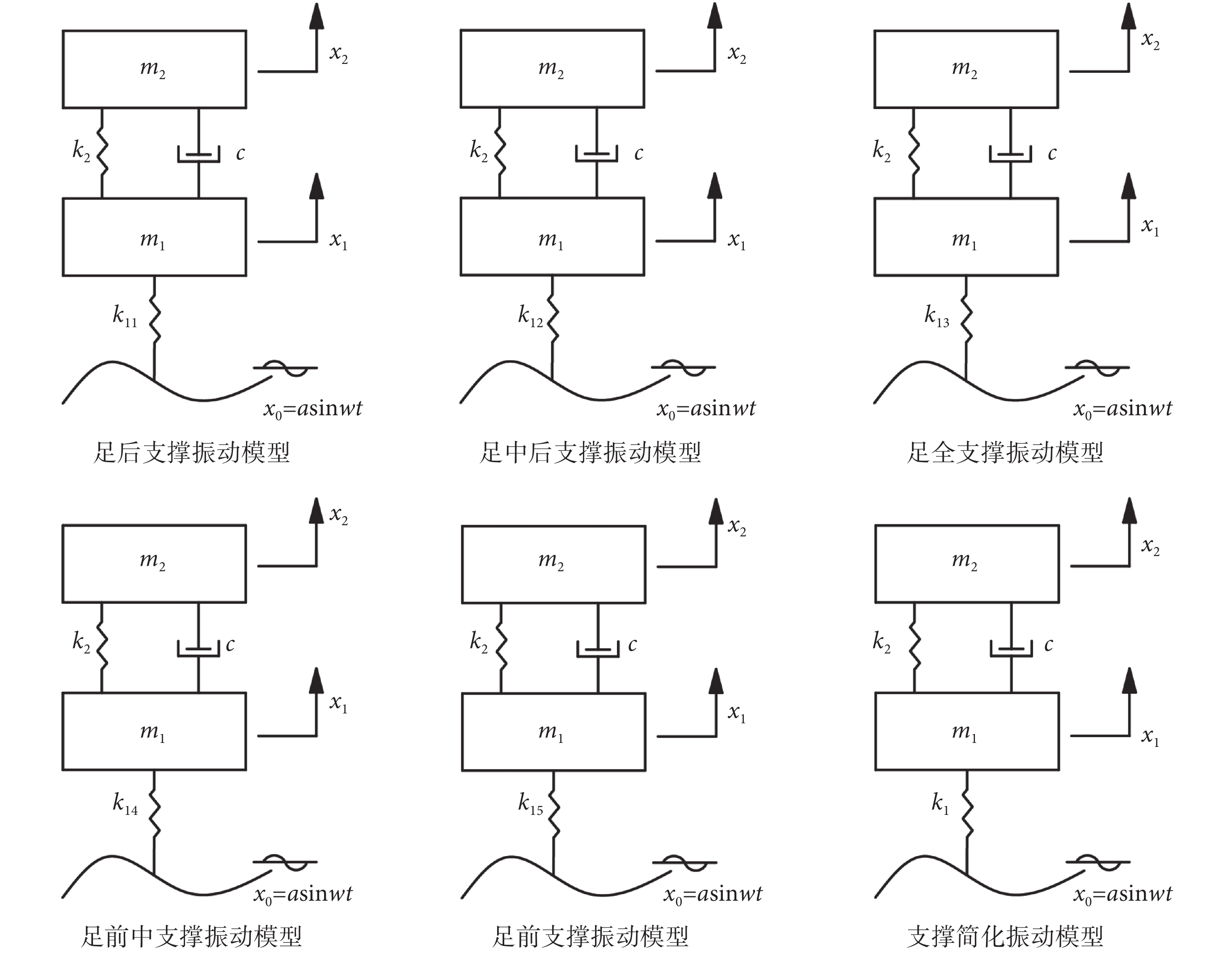 圖4
各支撐相的振動模型
Figure4.
Vibration model of each supporting phase
圖4
各支撐相的振動模型
Figure4.
Vibration model of each supporting phase
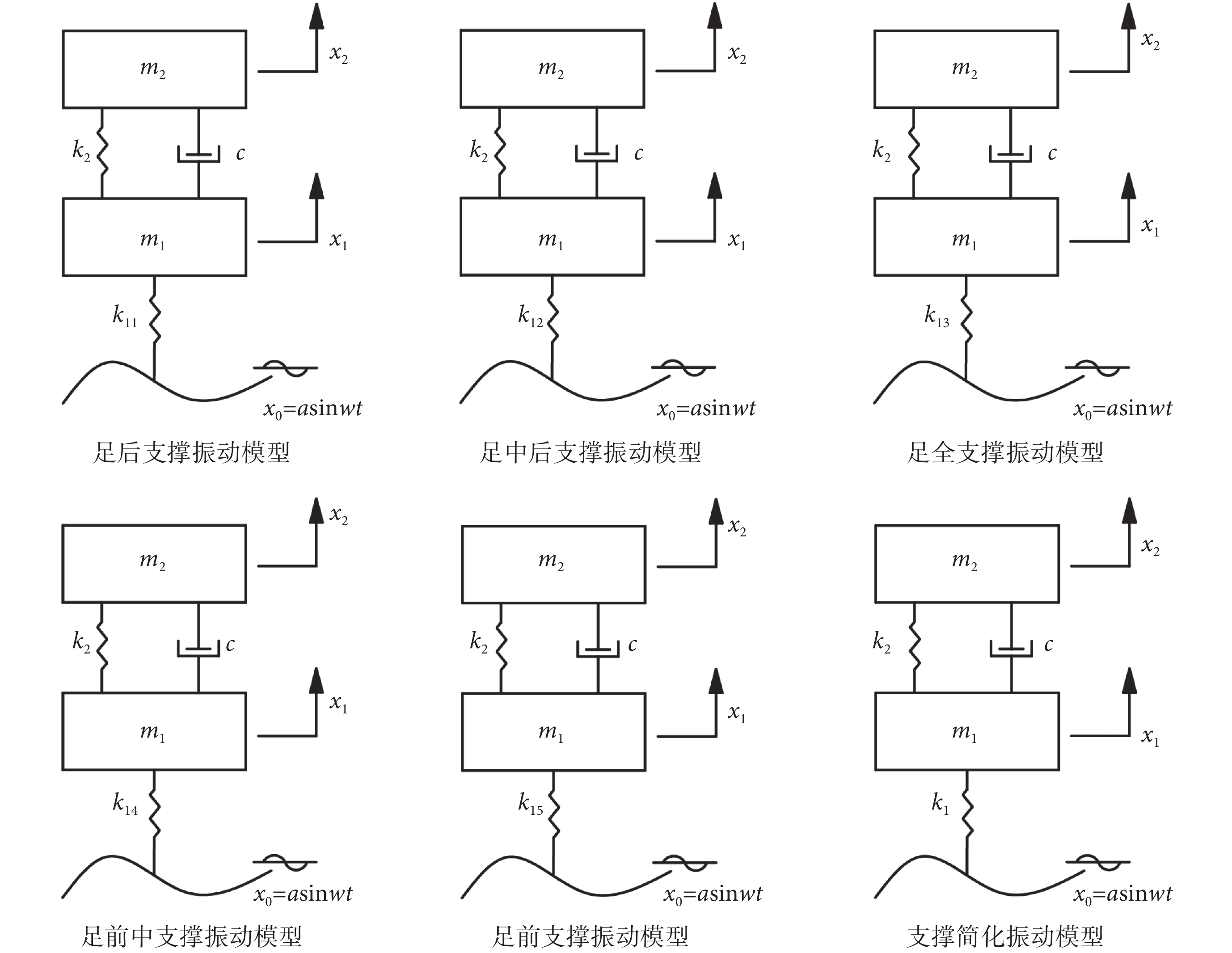
圖 4 中 x0 為傳入足底的振動激勵,a 為傳入振動激勵的振幅,w 為傳入振動激勵的固有頻率,t 為時間,m1 為外骨骼足部機構的質量,x1 為 m1 的位移,m2 為人體、外骨骼(本課題組研發的)及負重總質量,x2 為 m2 的位移,c 為該外骨骼足部機構固定板添加的阻尼,k2 為柔性仿足機構的剛度系數,k11 為后部減振體的剛度系數,k12 為中部與后部減振體的剛度系數,k13 為全部減振體的剛度系數,k14 為前部與中部減振體的剛度系數,k15 為前部減振體的剛度系數,k1 為下彈簧的剛度,是為了便于研究而抽象出來的振動量,無實際物理意義。依據圖 4 前 5 組振動模型可簡化出具有同樣振動規律的 2 自由度振動模型,該足部簡化振動模型如圖 4 右下角所示,基于該 2 自由度振動系統模型,本文進一步深入研究振動參數對絕對傳遞率的影響。
2.3 振動模型的驗證
由 2 自由度振動系統模型列出振動方程,如式(1)所示,當各振動參數確定時,2 自由度振動模型會因為自重而導致兩個彈簧被壓縮,并且兩個彈簧的壓縮量為一定值,兩個彈簧的總壓縮量可用式(1)計算。本文中,因為 m2 為人體、外骨骼及負重總質量,m2 取值大概率的落在 70~90 kg 之間,而且為了避免出現偶然誤差,對于 m2 的取值定為 70、80、90 kg 三個值,可分別計算得到 3 個彈簧理論總壓縮量。
 |
式中,x1 為 m1 的位移,x2 為 m2 的位移,c 為該外骨骼足部機構固定板添加的阻尼,k2 為柔性仿足機構的剛度,k1 為下彈簧的剛度。
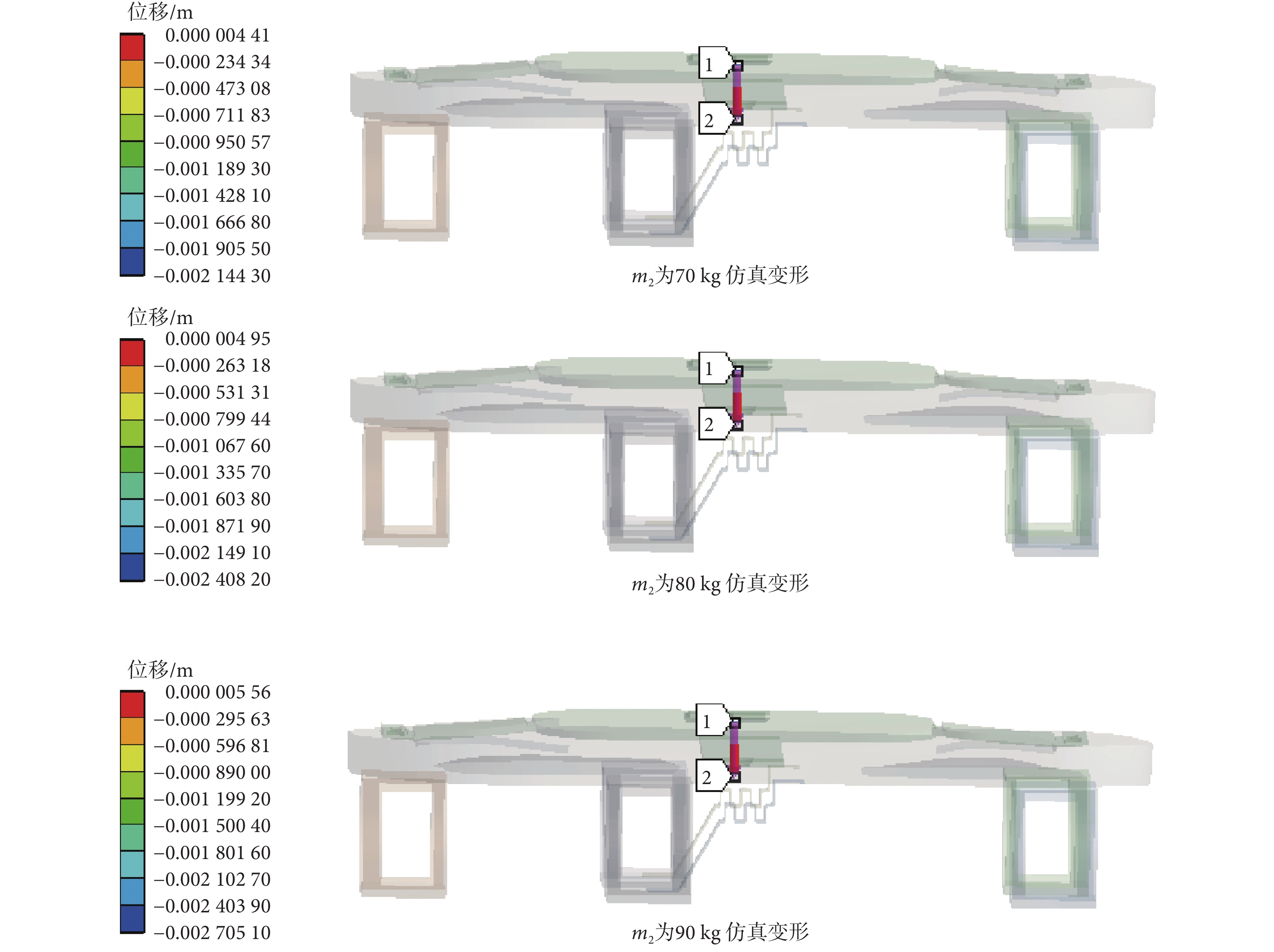
為了驗證足部簡化模型的正確性,本文利用通用有限元分析軟件協同仿真環境 Workbench 14.5(ANSYS Inc, 美國)進行仿真,仿真過程如下:選用相同的振動參數建立外骨骼足部機構的物理模型,為了計算簡便,重力加速度 g 取值為 10 m/s2,因此對該模型分別施加 700、800、900 N 的力,可獲得 3 個仿真壓縮量,壓縮變形情況如圖 5 所示,圖中標示為點 1 的數值代表 x2 的值(即總壓縮量值),為了直接讀取變量 x2 的值,建立了標示為 2 的點作為輔助,本文中僅需要點 1 的數值。
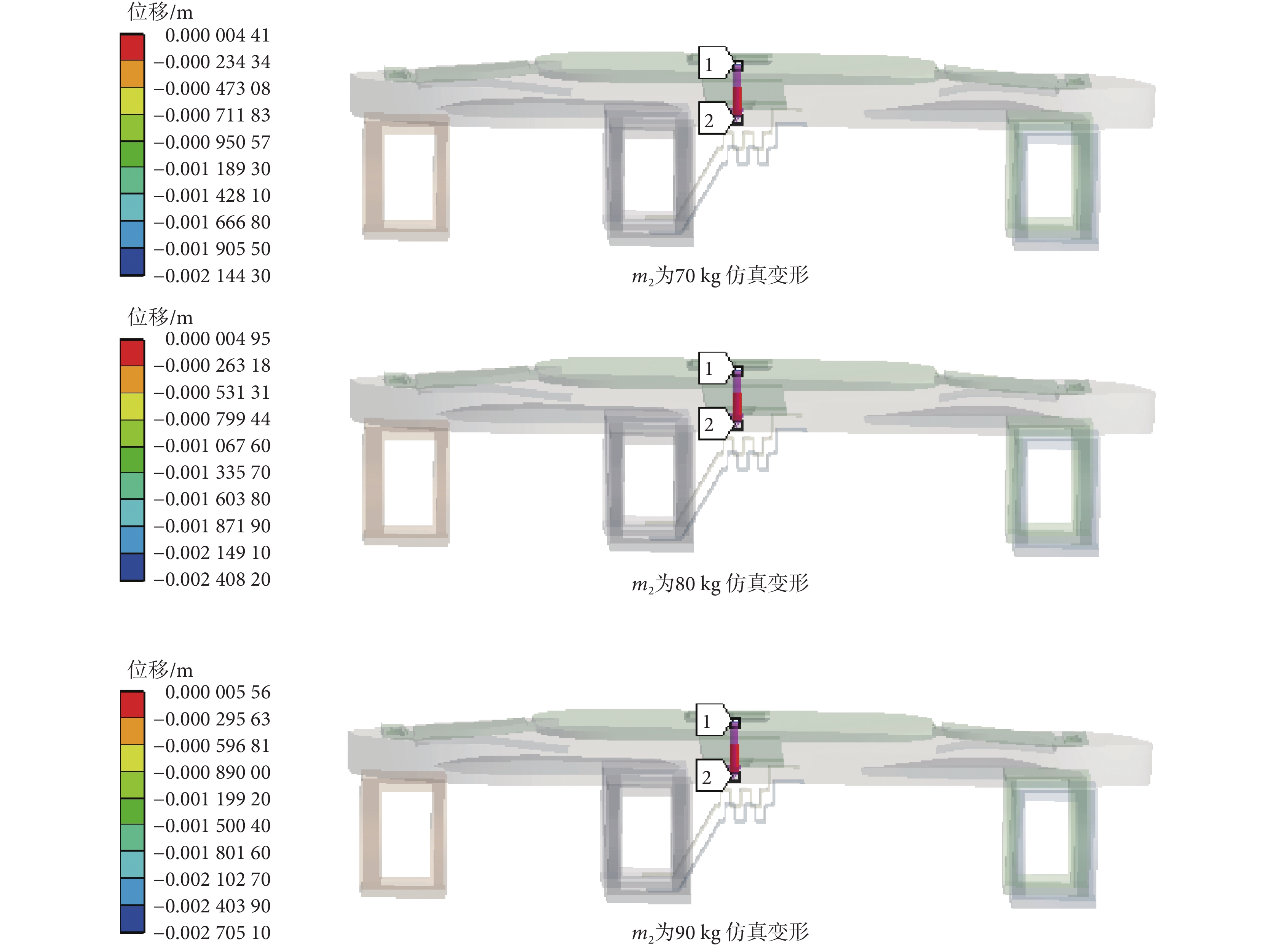 圖5
不同 m2 時的受力變形圖
Figure5.
The stress deformation diagram under different m2
圖5
不同 m2 時的受力變形圖
Figure5.
The stress deformation diagram under different m2
理論壓縮量與仿真壓縮量對比如表 1 所示,該表中還統計了誤差值,結果表明足全支撐振動模型的理論計算值與 ANSYS 仿真結果存在 7% 左右的誤差,根據文獻[19],柔性建模的合理范圍是小于 10%,誤差的主要原因是物理結構柔性特質的影響,因此證明該振動模型的簡化是正確的。
3 振動參數對絕對傳遞率的影響
絕對傳遞率是足底所受沖擊加速度與振動源輸入加速度比值的絕對值[20],該絕對值與足底所受沖擊力成正比。本文為了減小足底沖擊力,需要減小絕對傳遞率,因而要分析振動參數對該絕對傳遞率的影響。絕對傳遞率以符號 T2 表示,其計算分析過程如下。
為了將方程簡化,表示出絕對傳遞率 T2,初始條件定義為位移與速度等于零,即 ,
, 代入式(1),利用拉普拉斯變換求解方程,變換結果如式(2)所示:
代入式(1),利用拉普拉斯變換求解方程,變換結果如式(2)所示:
 |
式中,X0 代表傳入足底的振動激勵,X1 代表 m1 的位移,X2 代表 m2 的位移,在此用大寫英文字母是為了與拉氏變換之前的符號進行區分,通過式(2)可得兩個位移值 X1、X2,這兩個位移值的表達分別如式(3)~(4)所示:
 |
 |
將 s = iw 代入式(3)~(4)中,s 為復頻率,i 為復數單位,w 為頻率,整理可得 X1,X2 如式(5)~(6)所示:
 |
 |
將  ,
, ,
, ,
,
 ,
, ,
, ,
, 代入式(5)~(6)中,X1,X2 的表達式如(7)~(8)所示:
代入式(5)~(6)中,X1,X2 的表達式如(7)~(8)所示:
 |
 |
式中,
 ,通過式(7)~(8)可以得到底板對足部的絕對傳遞率 T2 如式(9)所示:
,通過式(7)~(8)可以得到底板對足部的絕對傳遞率 T2 如式(9)所示:
 |
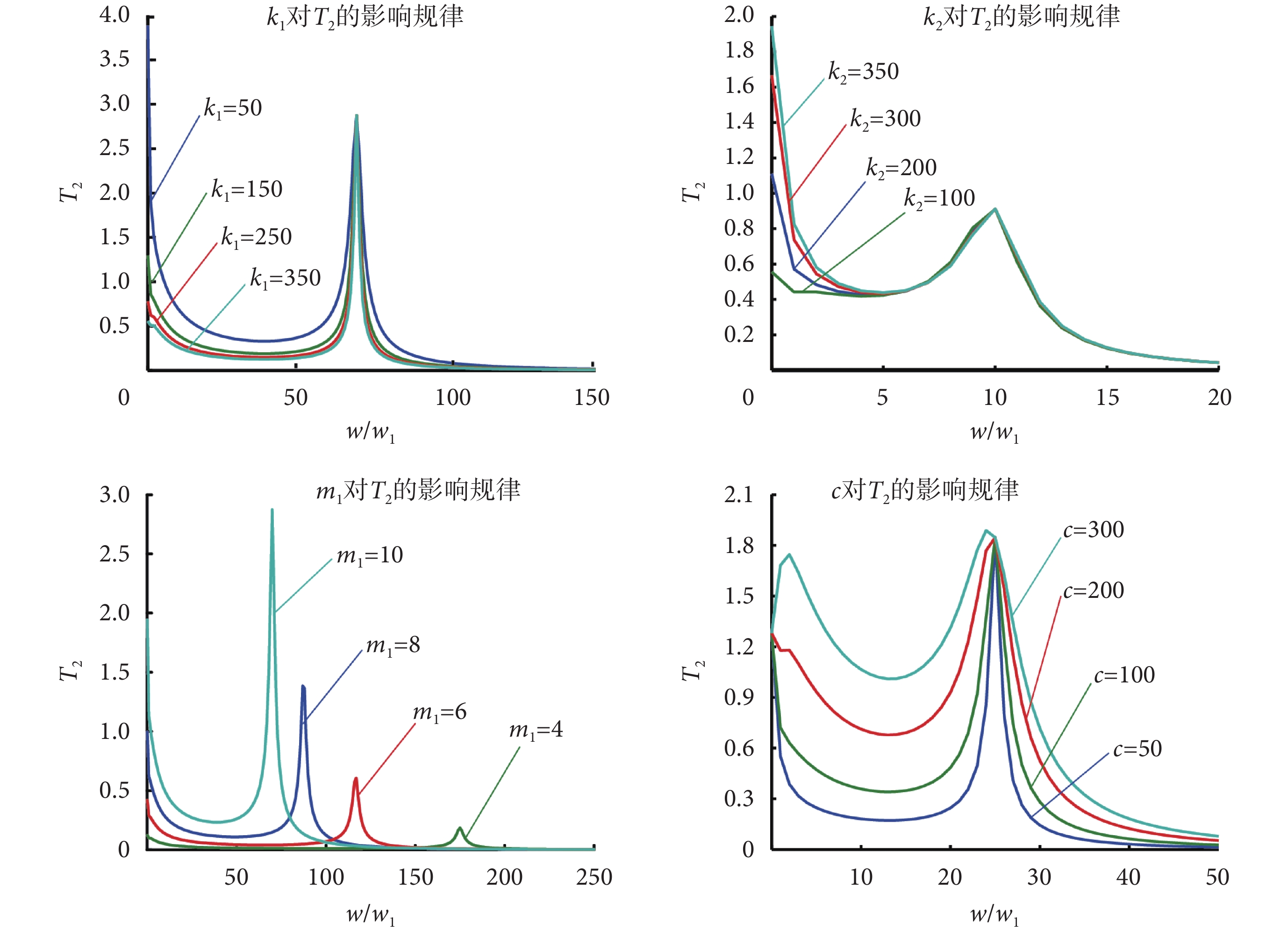
由式(9)可以分別得到振動參數 c,k1,m1,k2 對絕對傳遞率 T2 的影響,具體的影響曲線如圖 6 所示,k1 主要影響左側的峰值,k1 越小左側峰值越大,并且 T2 整體曲線隨著 k1 的減小而升高,因此 k1 取較大值有利于減小絕對傳遞率;k2 則恰恰相反,k2 取較大值有利于減小絕對傳遞率。m1 取值越小,右側的峰值區更接近坐標原點,且右側峰值更大,該現象表明當 w1 一定時,較小的外部激振頻率就會引起共振,因而 m1 取較大值有利于減小絕對傳遞率。但是 m1 作為足部機構的質量,在人行走過程中,足部的重量每增加 1 克,對足部造成的負擔相當于在人的脊背上增加幾十克的重量[21-22],因此,m1 取值存在邊界。c 越大,T2 的整體曲線也隨之上升,因此 c 取較小值有利于減小絕對傳遞率。以上分析結果可為后續的振動參數的選取提供約束條件。
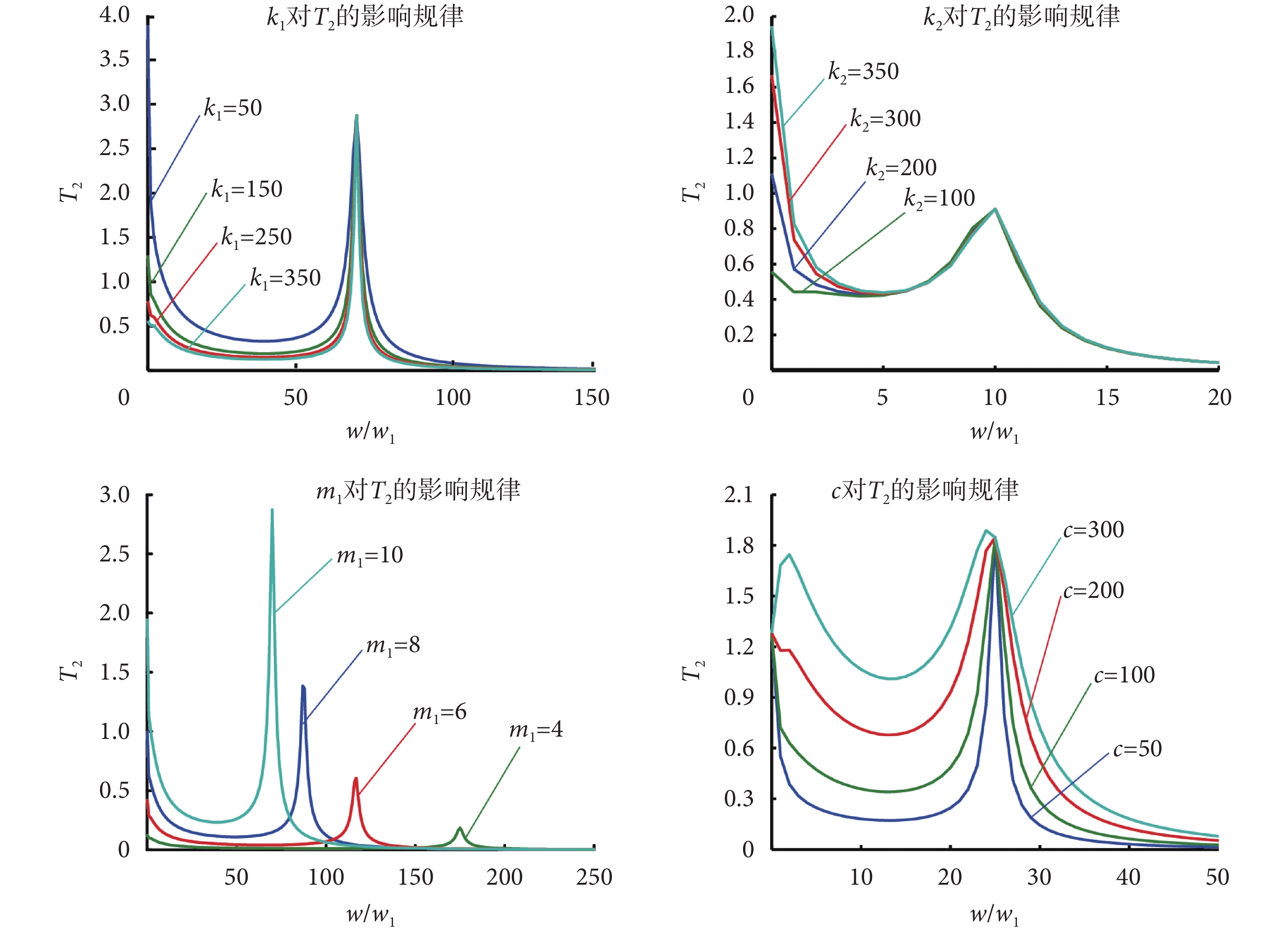 圖6
振動參數對絕對傳遞率的影響
Figure6.
Influence of vibration parameters on absolute transmissibility
圖6
振動參數對絕對傳遞率的影響
Figure6.
Influence of vibration parameters on absolute transmissibility
4 振動參數的確定
為了對振動參數進行優化,本文首先研究了振動加權均方根加速度值對舒適性指標的影響,并以該值控制在 0.05~0.315 m/s2以內作為一個目標函數;然后通過分析振動參數對絕對傳動率的影響規律,為振動參數的優化提供了約束條件與另一個目標函數;最后應用數學計算軟件 MATLAB R2014a(MathWorks Inc,美國)的遺傳算法工具箱函數優化振動參數。
4.1 振動加權均方根加速度值的定義及舒適度指標
根據 GB/T13441.1-2007/ISO22631-1:1997《機械振動與沖擊-人體暴露于全身振動的評價》[12],對某些環境可以用一個具有代表性周期的頻率計算振動加權均方根加速度來評價振動對人體舒適的影響。振動加權均方根加速度值的計算公式如式(10)所示:
 |
式中,aw(t) 為時間函數(時間歷程)的加速度值(平移或旋轉的),單位為 m/s2 和 rad/s2;T 為時間長度,單位為 s。
4.2 優化的約束條件
約束條件的選取與舒適性有關,因此本文基于 GB/T13441.1-2007/ISO22631-1:1997《機械振動與沖擊-人體暴露于全身振動的評價》[12],查到振動加權均方根加速度值與人體感受的關系如表 2 所示。
由表 2 可知,將振動加權均方根加速度值小于 0.315 m/s2作為一個約束條件,但是考慮到外骨骼的助力性,外骨骼足部機構的彈簧在壓縮時可儲存彈性勢能,用于下一步態釋放,因此振動加權均方根加速度值也不應太小,在此將振動加權均方根加速度值大于 0.05 m/s2作為另一個約束條件。具體的優化條件如表 3 所示,其中 T21 為足后支撐的絕對傳遞率,T22 為足中后支撐的絕對傳遞率,T23 為足全支撐的絕對傳遞率,T24 為足前中支撐的絕對傳遞率,T25 為足前支撐的絕對傳遞率,min 代表取最小值,aw1 為足后支撐的振動加權均方根加速度值,aw2 為足中后支撐的振動加權均方根加速度值,aw3 為足全支撐的振動加權均方根加速度值,aw4 為足前中支撐的振動加權均方根加速度值,aw5 為足前支撐的振動加權均方根加速度值,根據約束條件進行振動參數的優化。
4.3 遺傳算法工具箱對振動參數優化
本文以絕對傳遞率最小與振動加權均方根加速度值存在取值邊界作為優化目標函數,具體優化目標函數如式(11)所示:
 |
結合振動參數對絕對傳遞率與振動加權均方根加速度值的影響,本文選取各參數的約束條件,各參數的約束條件如式(12)所示:
 |
設定優化參數 m1、k1、k2,采用 MATLAB 遺傳算法優化工具箱對該模型求解。目標函數與約束條件分別如式(11)~(12)所示。工具箱的參數設置為:種群數量 M = 200,最大進化代數 W = 300,交叉概率 Pc = 0.7,變異概率 Pm = 0.01。優化后的結果為:m1 = 0.5 kg,k1 = 50 N/mm,k2 = 700 N/mm,k11 = 20 N/mm,k12 = 40 N/mm,k13 = 50 N/mm,k14 = 30 N/mm,k15 = 10 N/mm,下文將優化后的振動參數進行驗證,判斷是否符合實際運動時的舒適性指標。
5 振動加權均方根加速度值的分析與建模
5.1 隨機高程的建模
為了計算人體的加速度值,本文首先需要利用式(1)在數學計算軟件可視化仿真工具 Simulink(MathWorks Inc,美國)搭建振動仿真模型,沖擊振動的輸入量用路面不平度的時域輸入來實現[23-25],將優化后的振動參數代入振動仿真模型中,可以求解出人體的加速度值。
5.1.1 路面隨機不平度時域模型的建立
人在隨機路面上行走時,可將路面的速度輸入譜視為白噪聲[26],假設人體以速度 u 勻速前行時,可以得到時域路面不平度功率譜密度  ,如式(13)所示:
,如式(13)所示:
 |
式中,n0 為空間參考頻率,計算數值為 n0 = 0.1(1/m), 為路面不平度系數,當 ω→0 時,G(ω)→∞。因此,考慮下截止角頻率 ω0 后,實用功率譜密度如式(14)所示:
為路面不平度系數,當 ω→0 時,G(ω)→∞。因此,考慮下截止角頻率 ω0 后,實用功率譜密度如式(14)所示:
 |
式(14)可視為白噪聲激勵的一階線性系統的響應。根據隨機振動理論,可知時域路面不平度功率譜密度  如式(15)所示:
如式(15)所示:
 |
式中,H(ω) 為頻響函數,Sω 為白噪聲 W(t) 功率譜密度,取 Sω = 1,代入式(15)中化簡可得頻域響應函數 H(ω),如式(16)所示,j 為虛數單位,時域路面不平度的狀態方程如(17)所示:
 |
 |
式中,W(t) 為均值為零的高斯(Gauss)白噪聲,q(t) 為路面隨機高程,單位為 m,n0 為參考空間頻率,n00 為下截至空間頻率。根據式(17)在數學計算軟件可視化仿真工具 Simulink(MathWorks Inc,美國)中搭建仿真模型,將 Gauss 白噪聲 W(t) 作為輸入,其余相關參數代入仿真模型中,即可獲得隨機高程。
5.1.2 振動加權均方根加速度值模型的建立
隨機高程作為振動加權均方根加速度值分析的基礎,下文需要建立隨機高程的仿真模型來求解隨機高程。隨機高程是基于速度與路面情況的時域響應輸出,作為整體外骨骼足部機構的振動輸入激勵。依照文獻[27]中的功率譜密度,把路面分成 8 級,A~H 級信號為路況復雜程度,等級越靠后,路況越復雜,各級路面的不平度系數的取值范圍如表 4 所示。
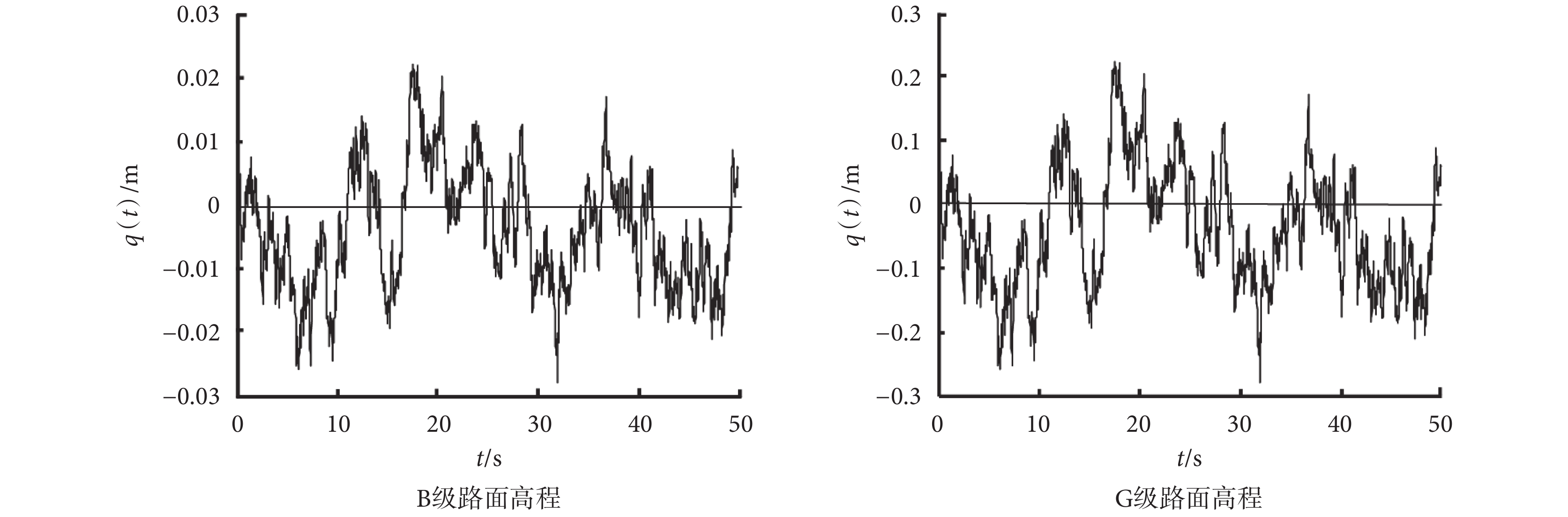
考慮到外骨骼工作環境的復雜性,將路面等級選取為 G 級。通過式(17),借助于數學計算軟件可視化仿真工具 Simulink 模塊(MathWorks Inc,美國),仿真得到隨機路面高程。為驗證該路面高程信號的正確性,需生成 B 級路面高程,驗證 B 級路面高程的不平度功率譜密度,該 B 級路面高程的曲線如圖 7 左圖所示,振動輸入激勵 G 級路面高程的曲線如圖 7 右圖所示。
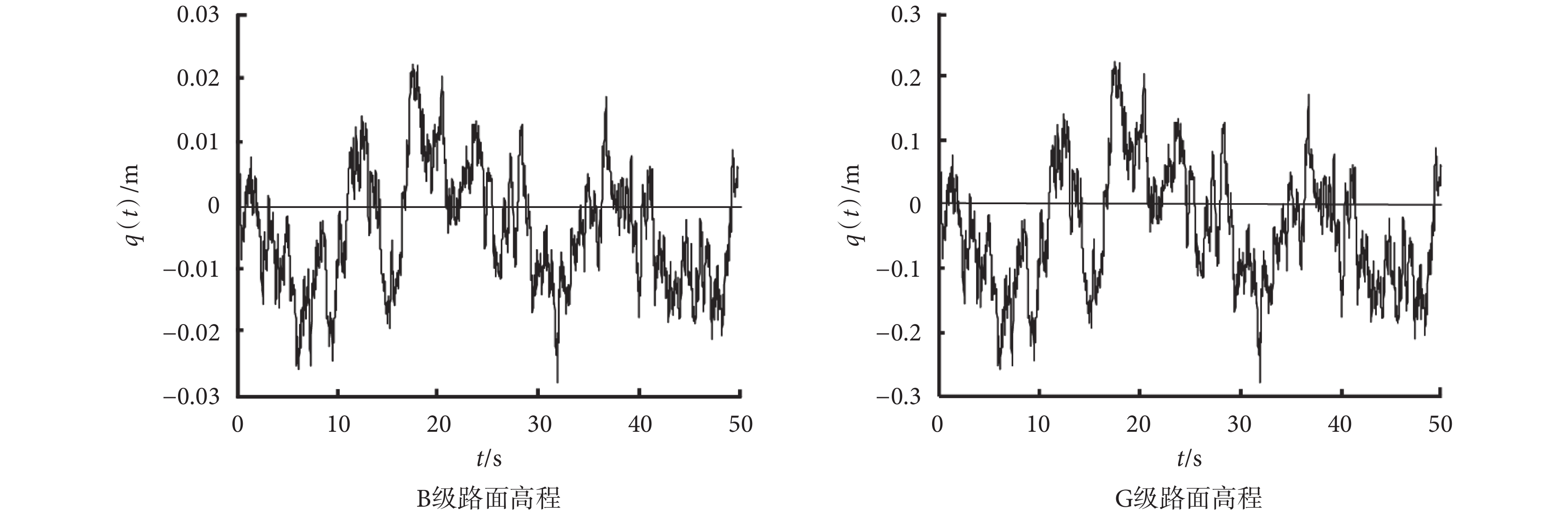 圖7
B 級與 G 級的路面高程
Figure7.
Class B and class G road elevations
圖7
B 級與 G 級的路面高程
Figure7.
Class B and class G road elevations
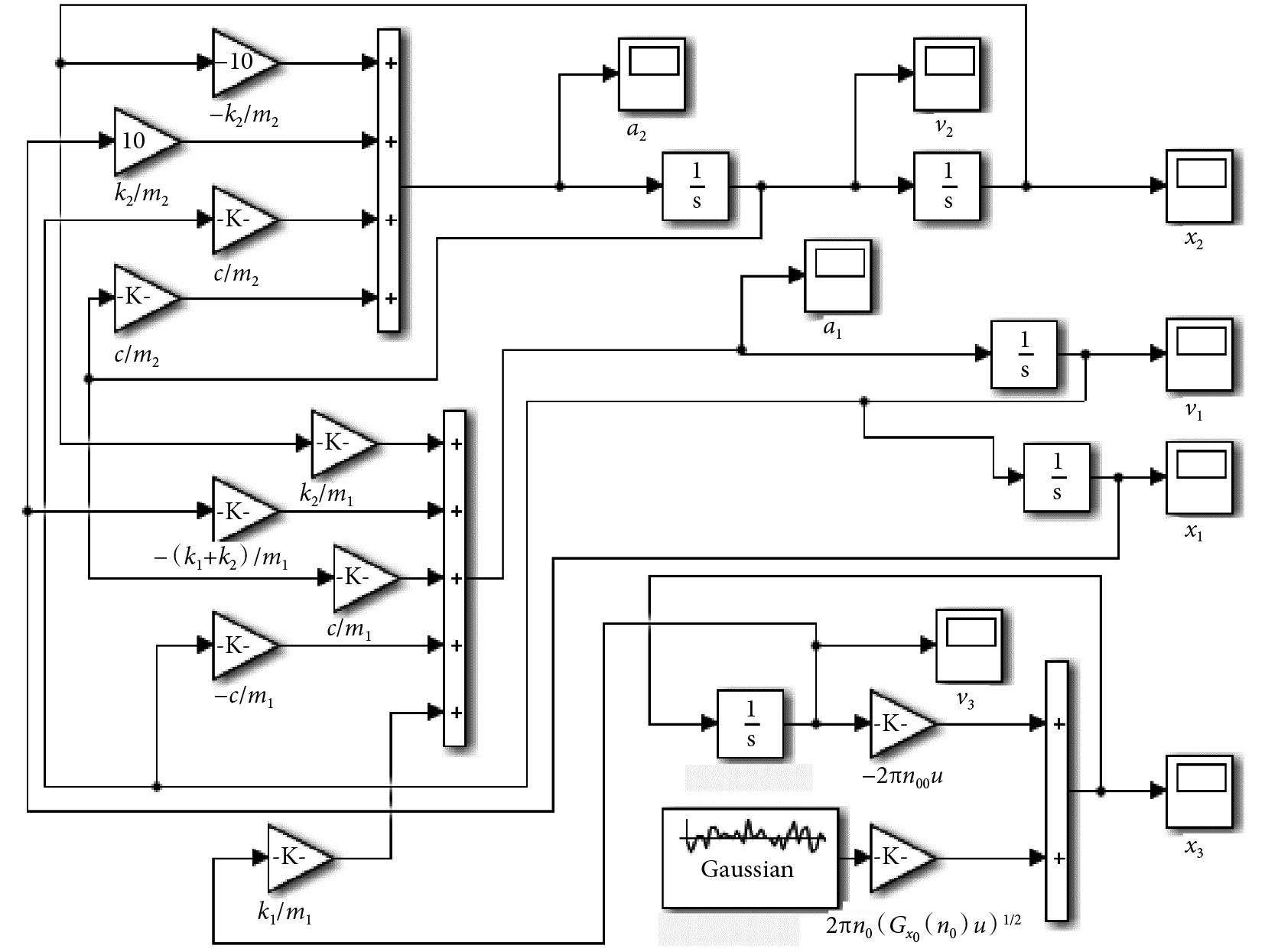
根據式(1)與式(17)的振動約束關系,可借助數學計算軟件可視化仿真工具 Simulink(MathWorks Inc,美國)建立足部機構的振動仿真模型框圖,該框圖如圖 8 所示。
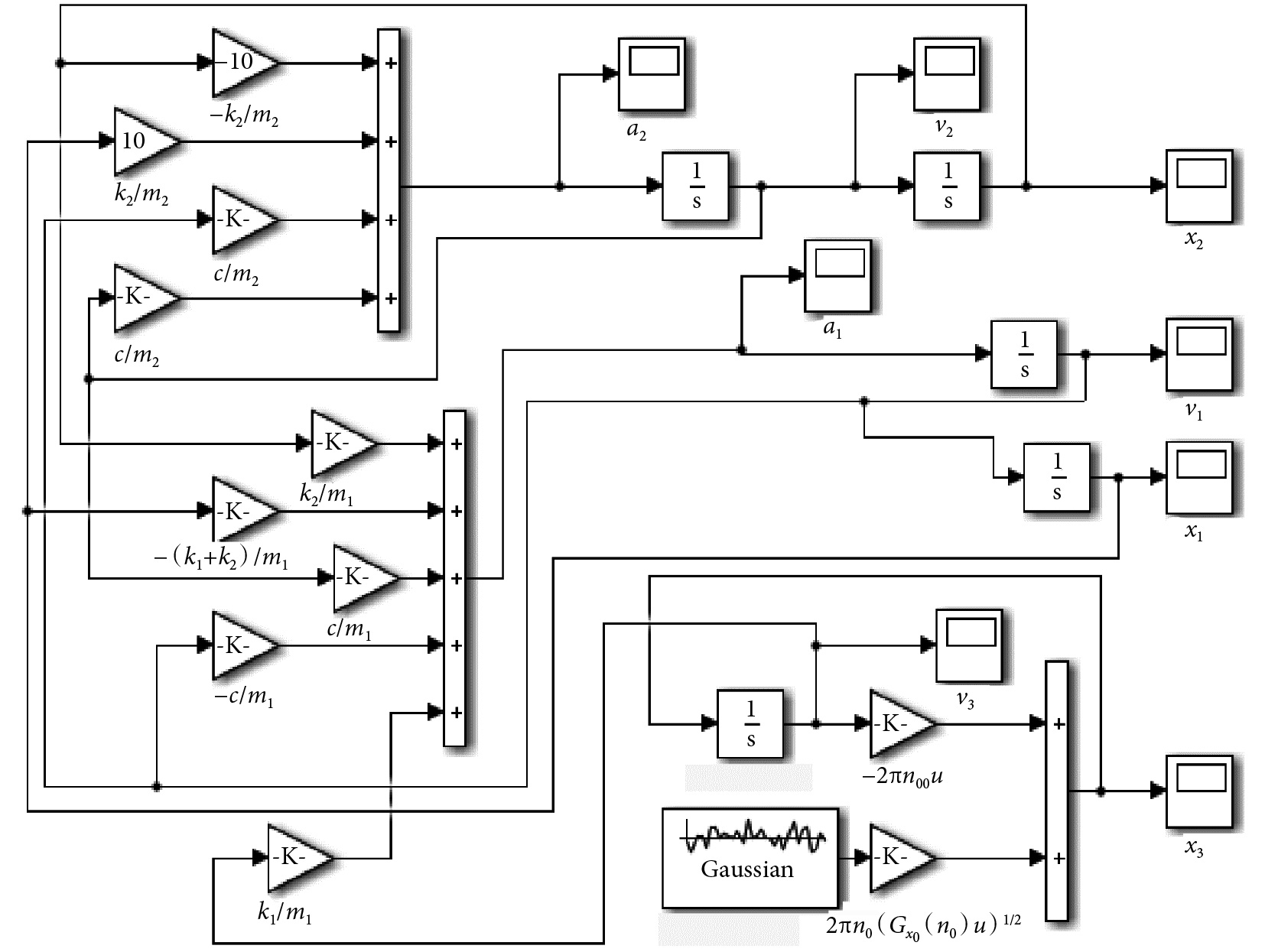 圖8
Simulink 仿真模型
Figure8.
Simulink simulation model
圖8
Simulink 仿真模型
Figure8.
Simulink simulation model
圖 8 中出現字符與公式中字符意義相同,v1 為 m1 的速度,a1 為 m1 的加速度,v2 為 m2 的速度,a2 為 m2 的加速度,v3 為路面隨機高程的一階導數,x3 為隨機路面高程。將 x3 與振動參數輸入如圖 8 所示的仿真模型中,即可獲得傳入足部的加速度值 a2。將該加速度值 a2 代入式(10)中,可計算足部的振動加權均方根加速度值。
5.2 仿真誤差分析
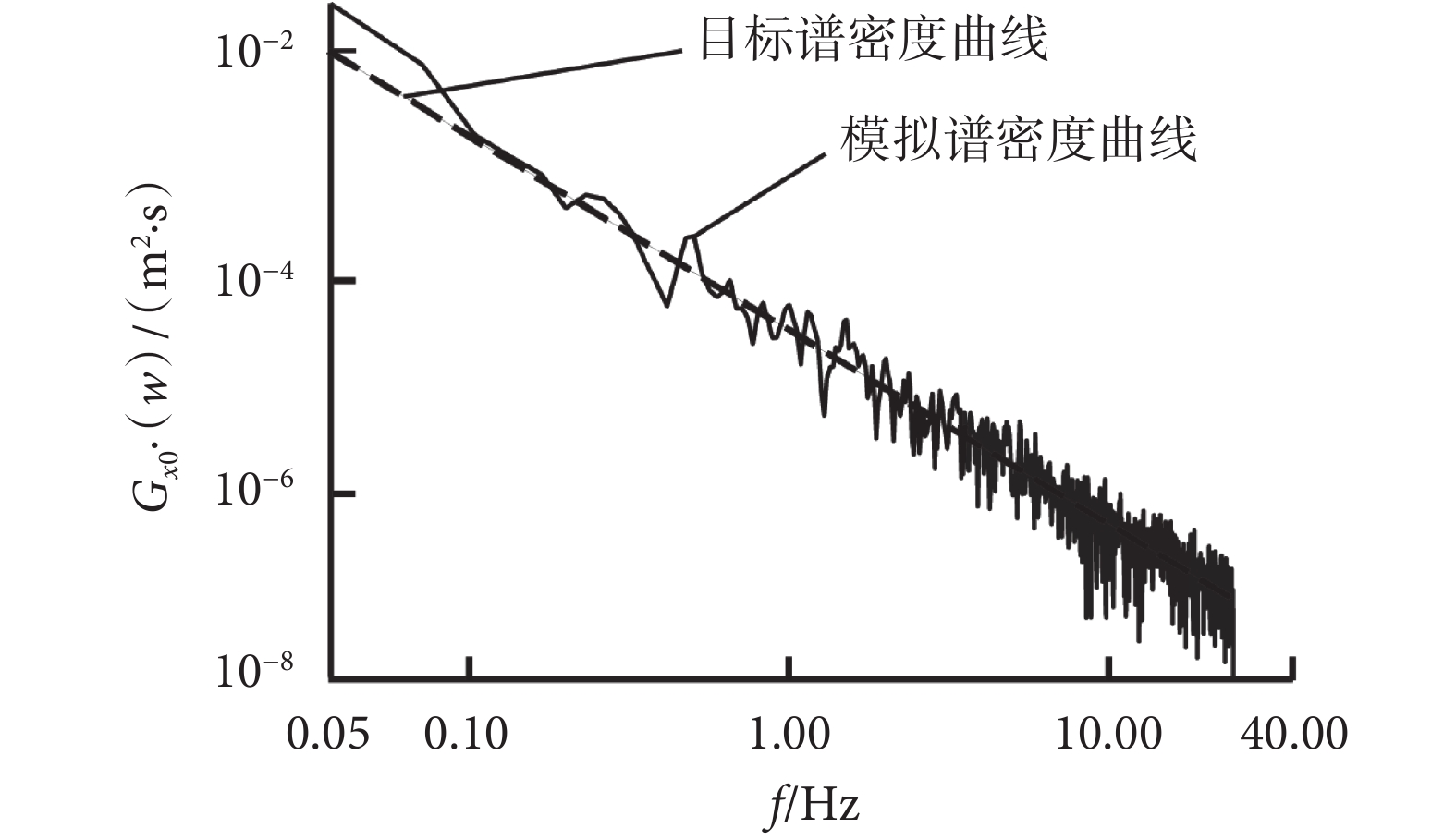
功率譜密度的定義是單位頻帶內的“功率”(均方值),功率譜密度是結構在隨機動態載荷激勵下響應的統計結果,在此用于評價隨機路面高程結果的正確性。參考路面不平度功率譜的國際標準[23],對數學計算軟件 MATLAB R2014a(MathWorks Inc,美國)生成的 B 級路面不平度功率譜進行仿真誤差分析,分析結果如圖 9 所示。
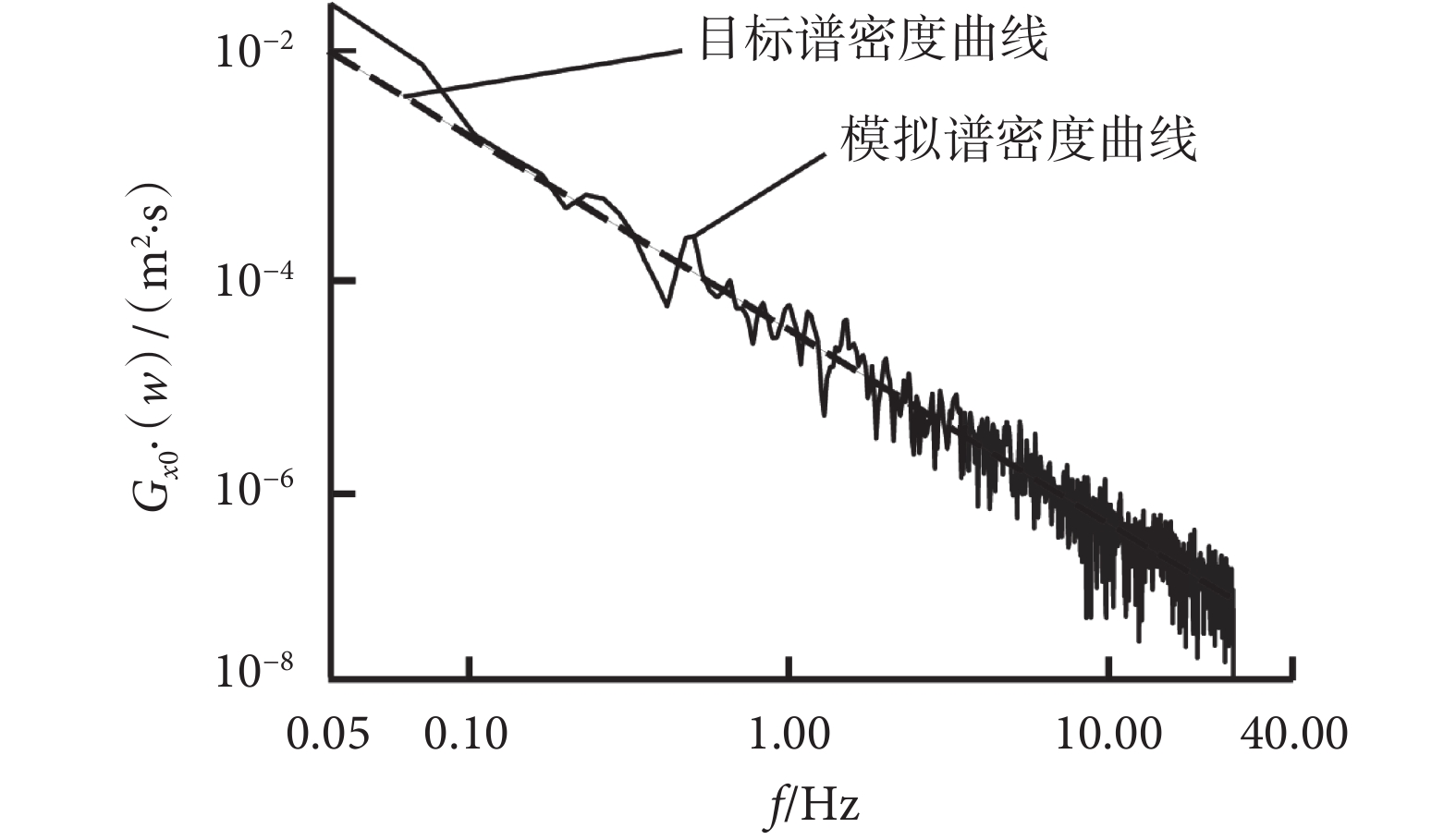 圖9
路面不平度功率譜曲線
Figure9.
Curve of power spectrum of road roughness
圖9
路面不平度功率譜曲線
Figure9.
Curve of power spectrum of road roughness
從圖 9 可以看出,在數學計算軟件 MATLAB R2014a(MathWorks Inc, 美國)中生成時域路面不平度,能夠較好地逼近目標譜密度曲線,滿足譜一致準則(模擬譜密度曲線下方的面積與目標譜曲線下方的面積近似相等[28]),因此證明生成的隨機高程是正確的。
6 結果的驗證
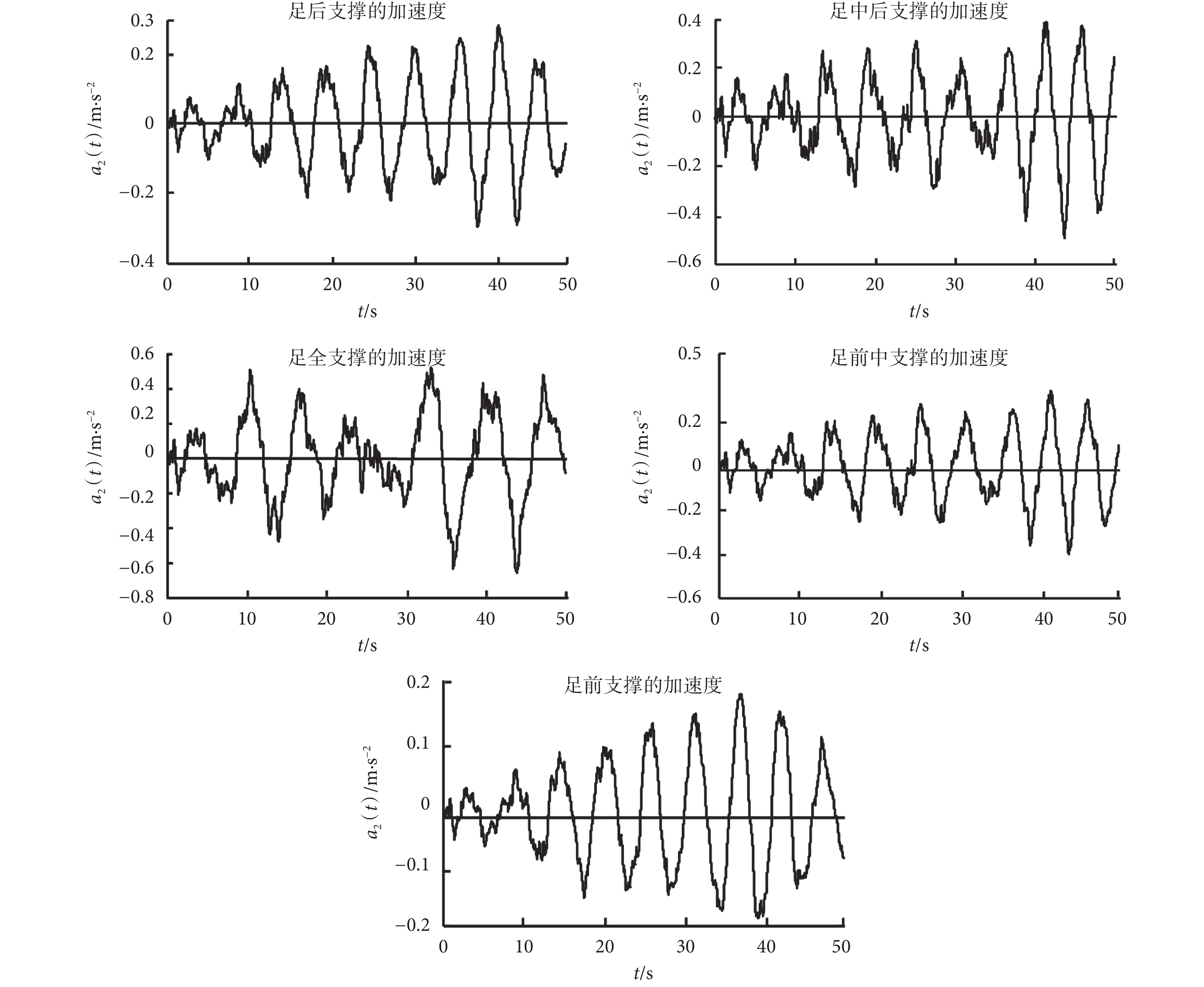
將優化后的振動參數代入圖 8 所示的仿真模型中,計算外骨骼足部機構的振動加權均方根加速度值,對于 5 個支撐狀態下的加速度仿真結果如圖 10 所示。
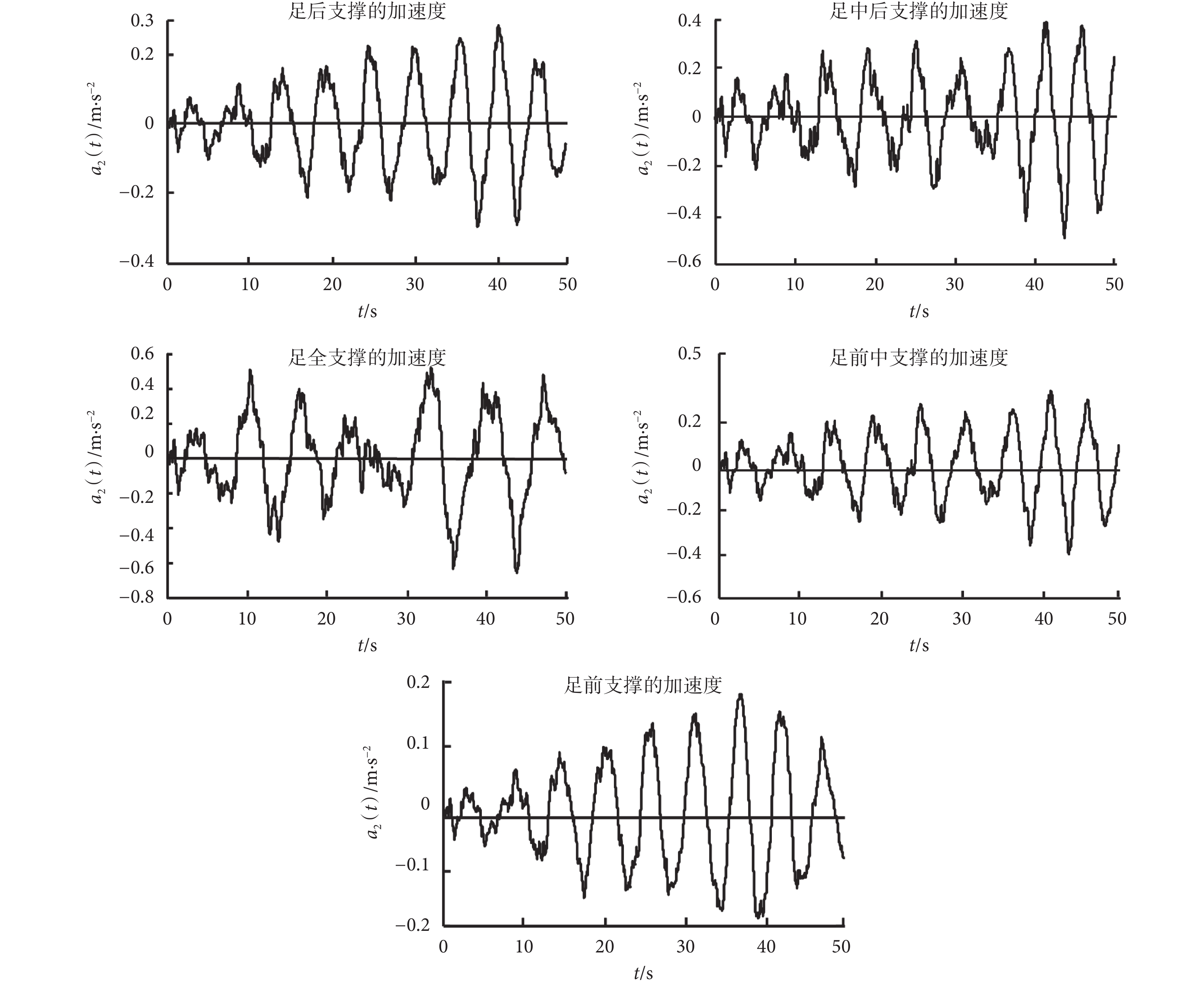 圖10
各支撐方式的加速度
Figure10.
Acceleration at each support mode
圖10
各支撐方式的加速度
Figure10.
Acceleration at each support mode
將圖 10 中的加速度值代入式(10)中,即可獲得各支撐狀態下振動加權均方根加速度值,具體數值如表 5 所示,結果表明,各支撐狀態下振動加權均方根加速度值均小于 0.315 m/s2且大于 0.05 m/s2,滿足舒適性約束條件,振動參數的優化結果是合理的,而且該足部機構能夠滿足減振性舒適性指標。
7 結論
本文提出了一種用于提高外骨骼足部舒適性的足部機構,研究了該外骨骼足部機構的減振性能,并得出以下結論:
(1)本文基于步態周期的足底受力特點,建立了外骨骼足部機構物理模型,進而簡化出振動模型,提煉出振動參數,為減振分析提供了理論基礎。
(2)本文通過分析振動參數對絕對傳遞率的影響規律,為振動參數的優化提供了約束條件與目標函數。
(3)本文針對足部舒適性設計,將絕對傳遞率取最小值與振動加權均方根加速度值控制在 0.05~0.315 m/s2范圍內作為舒適性約束條件,這些設計約束條件對于同類足部舒適性的設計具有參考意義。
(4)本文對于足部機構的舒適性設計提出了一整套設計方法,首先構建數學模型(本文以 2 自由度有阻尼的振動系統作為減振數學模型),再用物理模型實現數學模型(本文提出外骨骼足部機構的構型);然后用物理模型修正數學模型(本文基于步態周期的受力特點,劃分了 5 個振動模型),通過數學模型提取數學規律(本文列出了振動方程),基于約束條件優化數值參數(本文以絕對傳遞率和振動加權均方根加速度值來優化振動參數),利用評價指標驗證數值參數(本文驗證舒適性條件);最后將數值參數用于確定物理模型,將物理模型制造出機構,完成實驗的驗證。該設計方法對于絕大部分的機構設計具有普遍的借鑒意義。
利益沖突聲明:本文全體作者均聲明不存在利益沖突。
引言
穿戴型下肢外骨骼是一種人體助力裝備,有助于降低負重、攀爬及重物搬運等作業的勞動強度,對于提高工作效率具有重要意義[1-3]。在穿戴該裝備工作過程中,人體足部不可避免地承受來自地面的沖擊。而這種沖擊在劇烈運動時可達人體自重的 5 倍,因而會造成足部疲憊,降低使用舒適性,進而影響工作效率;另一方面,過度的沖擊會損害人體脊柱和大腦,影響作業人員健康。因此,有必要研究一種用于外骨骼的足部機構來提高行走過程中的舒適性,以緩解沖擊帶來的影響。
然而,針對足部機構舒適性的深入研究,在國內外文獻中相對少見,且考慮因素較為局限,如伯克利下肢外骨骼 Bleex 的足部傳感系統[4],僅在足部添加橡膠墊,未涉及足部的舒適性研究[5-6]。另一個系列的荷蘭特文特大學 MINDWALKER 外骨骼與佛羅里達人類和機器認知研究所的 Mina 外骨骼,則直接將鞋子連接在踝關節,未考慮舒適性與減振性[7-8]。國內研究中,海軍航空學院研制的能量輔助骨骼服,通過在足部設置壓力傳感器來檢測步態信息[9];哈爾濱工業大學研制成功一款下肢助力外骨骼機器人[10],這兩款外骨骼足部機構的局限性在于其結構均較為簡單,也未涉及到足部的舒適性研究。
為改善上述研究的局限,本文在一種無驅動耦合雙支鏈外骨骼的基礎上,提出了一種足部機構,該機構優勢在于通過減小在穿戴外骨骼時足部所受到的沖擊以提高足部舒適性。由文獻[11]可知,減小足底傳入的振動可以提高足部舒適性。本機構通過 2 階減振系統可以減小足底的沖擊,將傳入足底的加速度減小;且根據 GB/T13441.1-2007/ISO22631-1:1997《機械振動與沖擊-人體暴露于全身振動的評價》[12]與外骨骼的助力性,將振動加權均方根加速度值控制在 0.05~0.315 m/s2以內作為舒適性約束條件,由壓力鞋墊來控制足部的壓力閾值,再由文獻[13]可知,足部舒適性設計需要將步態足底壓力值進一步縮小到 56 kPa,以滿足人體舒適性。通過上述方法,本文為外骨骼足部機構的設計提供了一套較為完整的設計方法,對于其他外骨骼的足部設計以及踝關節康復機構的設計具有借鑒意義。
1 外骨骼足部機構的設計
張建軍等[14]提出一種含耦合雙支閉鏈機構的無驅動下肢外骨骼,如圖 1 左側所示。該外骨骼具備承載能力高、無續航時間限制、人機匹配度較高的優點。但是在設計該外骨骼時,足部機構僅實現了支撐與連接功能,未深入考慮足部舒適性問題,因此本文重點關注的是足部機構的舒適性設計,主要考慮減振性與足底壓力兩個因素。基于減振性能分析[15-16],結合行走過程中足部受力情況,本文確定需以 2 自由度的有阻尼振動系統對足部機構進行設計,進而得到足部機構模型,如圖 1 右側所示,其中足底壓力需要用壓力鞋墊來控制,柔性仿足機構簡化成上部彈簧,固定板添加阻尼材料可簡化成阻尼,柔性減振體簡化成下部彈簧,整體足部機構能夠具備減振效果,提高穿戴外骨骼時的使用舒適性。
圖1
外骨骼與足部結構
Figure1.
Exoskeleton and foot structure
本文基于 2 自由度的有阻尼振動系統所設計出的外骨骼足部機構,將進行以下研究:首先根據步態周期足部受力特點,建立不同步態下的振動模型并驗證振動模型的正確性;然后計算振動參數 (外骨骼足部機構的質量 m1,外骨骼足部機構固定板添加的阻尼 c,柔性仿足機構的剛度 k2,柔性減振體的剛度 k1) 對絕對傳遞率的影響并確定約束條件;最后應用數學計算軟件 MATLAB R2014a(MathWorks Inc,美國)的遺傳算法工具箱函數優化振動參數,并驗證振動模型的舒適性。
2 振動模型的建立
2.1 足部受力情況分析
減振性能的分析需要簡化出振動模型,而建立的振動模型需要考慮人體步態周期中的足底受力情況。人體在行走過程中,步態周期是指足跟著地到同側足跟再次著地所經歷的時間[17-18]。一個步態周期又可分為站立時相和擺動時相,擺動時相為足尖離地到足跟著地的時間,站立時相即為足跟著地到足尖離地的時間,在站立時相足底受力如圖 2 所示。
圖2
人在正常行走時的足部受力變化過程
Figure2.
Change process of foot stress during normal walking
2.2 振動模型的建立
根據站立時相的受力特點,本文將外骨骼足部機構受力劃分為 5 個階段,外骨骼足部機構相對應的物理模型受力如圖 3 所示,根據物理模型得到相應的如圖 4 所示的振動模型。
圖3
各支撐相的物理模型
Figure3.
Physical model of each supporting phase
圖4
各支撐相的振動模型
Figure4.
Vibration model of each supporting phase
圖 4 中 x0 為傳入足底的振動激勵,a 為傳入振動激勵的振幅,w 為傳入振動激勵的固有頻率,t 為時間,m1 為外骨骼足部機構的質量,x1 為 m1 的位移,m2 為人體、外骨骼(本課題組研發的)及負重總質量,x2 為 m2 的位移,c 為該外骨骼足部機構固定板添加的阻尼,k2 為柔性仿足機構的剛度系數,k11 為后部減振體的剛度系數,k12 為中部與后部減振體的剛度系數,k13 為全部減振體的剛度系數,k14 為前部與中部減振體的剛度系數,k15 為前部減振體的剛度系數,k1 為下彈簧的剛度,是為了便于研究而抽象出來的振動量,無實際物理意義。依據圖 4 前 5 組振動模型可簡化出具有同樣振動規律的 2 自由度振動模型,該足部簡化振動模型如圖 4 右下角所示,基于該 2 自由度振動系統模型,本文進一步深入研究振動參數對絕對傳遞率的影響。
2.3 振動模型的驗證
由 2 自由度振動系統模型列出振動方程,如式(1)所示,當各振動參數確定時,2 自由度振動模型會因為自重而導致兩個彈簧被壓縮,并且兩個彈簧的壓縮量為一定值,兩個彈簧的總壓縮量可用式(1)計算。本文中,因為 m2 為人體、外骨骼及負重總質量,m2 取值大概率的落在 70~90 kg 之間,而且為了避免出現偶然誤差,對于 m2 的取值定為 70、80、90 kg 三個值,可分別計算得到 3 個彈簧理論總壓縮量。
|
式中,x1 為 m1 的位移,x2 為 m2 的位移,c 為該外骨骼足部機構固定板添加的阻尼,k2 為柔性仿足機構的剛度,k1 為下彈簧的剛度。
為了驗證足部簡化模型的正確性,本文利用通用有限元分析軟件協同仿真環境 Workbench 14.5(ANSYS Inc, 美國)進行仿真,仿真過程如下:選用相同的振動參數建立外骨骼足部機構的物理模型,為了計算簡便,重力加速度 g 取值為 10 m/s2,因此對該模型分別施加 700、800、900 N 的力,可獲得 3 個仿真壓縮量,壓縮變形情況如圖 5 所示,圖中標示為點 1 的數值代表 x2 的值(即總壓縮量值),為了直接讀取變量 x2 的值,建立了標示為 2 的點作為輔助,本文中僅需要點 1 的數值。
圖5
不同 m2 時的受力變形圖
Figure5.
The stress deformation diagram under different m2
理論壓縮量與仿真壓縮量對比如表 1 所示,該表中還統計了誤差值,結果表明足全支撐振動模型的理論計算值與 ANSYS 仿真結果存在 7% 左右的誤差,根據文獻[19],柔性建模的合理范圍是小于 10%,誤差的主要原因是物理結構柔性特質的影響,因此證明該振動模型的簡化是正確的。
3 振動參數對絕對傳遞率的影響
絕對傳遞率是足底所受沖擊加速度與振動源輸入加速度比值的絕對值[20],該絕對值與足底所受沖擊力成正比。本文為了減小足底沖擊力,需要減小絕對傳遞率,因而要分析振動參數對該絕對傳遞率的影響。絕對傳遞率以符號 T2 表示,其計算分析過程如下。
為了將方程簡化,表示出絕對傳遞率 T2,初始條件定義為位移與速度等于零,即, 代入式(1),利用拉普拉斯變換求解方程,變換結果如式(2)所示:
|
式中,X0 代表傳入足底的振動激勵,X1 代表 m1 的位移,X2 代表 m2 的位移,在此用大寫英文字母是為了與拉氏變換之前的符號進行區分,通過式(2)可得兩個位移值 X1、X2,這兩個位移值的表達分別如式(3)~(4)所示:
|
|
將 s = iw 代入式(3)~(4)中,s 為復頻率,i 為復數單位,w 為頻率,整理可得 X1,X2 如式(5)~(6)所示:
|
|
將 ,,,,,, 代入式(5)~(6)中,X1,X2 的表達式如(7)~(8)所示:
|
|
式中,,通過式(7)~(8)可以得到底板對足部的絕對傳遞率 T2 如式(9)所示:
|
由式(9)可以分別得到振動參數 c,k1,m1,k2 對絕對傳遞率 T2 的影響,具體的影響曲線如圖 6 所示,k1 主要影響左側的峰值,k1 越小左側峰值越大,并且 T2 整體曲線隨著 k1 的減小而升高,因此 k1 取較大值有利于減小絕對傳遞率;k2 則恰恰相反,k2 取較大值有利于減小絕對傳遞率。m1 取值越小,右側的峰值區更接近坐標原點,且右側峰值更大,該現象表明當 w1 一定時,較小的外部激振頻率就會引起共振,因而 m1 取較大值有利于減小絕對傳遞率。但是 m1 作為足部機構的質量,在人行走過程中,足部的重量每增加 1 克,對足部造成的負擔相當于在人的脊背上增加幾十克的重量[21-22],因此,m1 取值存在邊界。c 越大,T2 的整體曲線也隨之上升,因此 c 取較小值有利于減小絕對傳遞率。以上分析結果可為后續的振動參數的選取提供約束條件。
圖6
振動參數對絕對傳遞率的影響
Figure6.
Influence of vibration parameters on absolute transmissibility
4 振動參數的確定
為了對振動參數進行優化,本文首先研究了振動加權均方根加速度值對舒適性指標的影響,并以該值控制在 0.05~0.315 m/s2以內作為一個目標函數;然后通過分析振動參數對絕對傳動率的影響規律,為振動參數的優化提供了約束條件與另一個目標函數;最后應用數學計算軟件 MATLAB R2014a(MathWorks Inc,美國)的遺傳算法工具箱函數優化振動參數。
4.1 振動加權均方根加速度值的定義及舒適度指標
根據 GB/T13441.1-2007/ISO22631-1:1997《機械振動與沖擊-人體暴露于全身振動的評價》[12],對某些環境可以用一個具有代表性周期的頻率計算振動加權均方根加速度來評價振動對人體舒適的影響。振動加權均方根加速度值的計算公式如式(10)所示:
|
式中,aw(t) 為時間函數(時間歷程)的加速度值(平移或旋轉的),單位為 m/s2 和 rad/s2;T 為時間長度,單位為 s。
4.2 優化的約束條件
約束條件的選取與舒適性有關,因此本文基于 GB/T13441.1-2007/ISO22631-1:1997《機械振動與沖擊-人體暴露于全身振動的評價》[12],查到振動加權均方根加速度值與人體感受的關系如表 2 所示。
由表 2 可知,將振動加權均方根加速度值小于 0.315 m/s2作為一個約束條件,但是考慮到外骨骼的助力性,外骨骼足部機構的彈簧在壓縮時可儲存彈性勢能,用于下一步態釋放,因此振動加權均方根加速度值也不應太小,在此將振動加權均方根加速度值大于 0.05 m/s2作為另一個約束條件。具體的優化條件如表 3 所示,其中 T21 為足后支撐的絕對傳遞率,T22 為足中后支撐的絕對傳遞率,T23 為足全支撐的絕對傳遞率,T24 為足前中支撐的絕對傳遞率,T25 為足前支撐的絕對傳遞率,min 代表取最小值,aw1 為足后支撐的振動加權均方根加速度值,aw2 為足中后支撐的振動加權均方根加速度值,aw3 為足全支撐的振動加權均方根加速度值,aw4 為足前中支撐的振動加權均方根加速度值,aw5 為足前支撐的振動加權均方根加速度值,根據約束條件進行振動參數的優化。
4.3 遺傳算法工具箱對振動參數優化
本文以絕對傳遞率最小與振動加權均方根加速度值存在取值邊界作為優化目標函數,具體優化目標函數如式(11)所示:
|
結合振動參數對絕對傳遞率與振動加權均方根加速度值的影響,本文選取各參數的約束條件,各參數的約束條件如式(12)所示:
|
設定優化參數 m1、k1、k2,采用 MATLAB 遺傳算法優化工具箱對該模型求解。目標函數與約束條件分別如式(11)~(12)所示。工具箱的參數設置為:種群數量 M = 200,最大進化代數 W = 300,交叉概率 Pc = 0.7,變異概率 Pm = 0.01。優化后的結果為:m1 = 0.5 kg,k1 = 50 N/mm,k2 = 700 N/mm,k11 = 20 N/mm,k12 = 40 N/mm,k13 = 50 N/mm,k14 = 30 N/mm,k15 = 10 N/mm,下文將優化后的振動參數進行驗證,判斷是否符合實際運動時的舒適性指標。
5 振動加權均方根加速度值的分析與建模
5.1 隨機高程的建模
為了計算人體的加速度值,本文首先需要利用式(1)在數學計算軟件可視化仿真工具 Simulink(MathWorks Inc,美國)搭建振動仿真模型,沖擊振動的輸入量用路面不平度的時域輸入來實現[23-25],將優化后的振動參數代入振動仿真模型中,可以求解出人體的加速度值。
5.1.1 路面隨機不平度時域模型的建立
人在隨機路面上行走時,可將路面的速度輸入譜視為白噪聲[26],假設人體以速度 u 勻速前行時,可以得到時域路面不平度功率譜密度 ,如式(13)所示:
|
式中,n0 為空間參考頻率,計算數值為 n0 = 0.1(1/m), 為路面不平度系數,當 ω→0 時,G(ω)→∞。因此,考慮下截止角頻率 ω0 后,實用功率譜密度如式(14)所示:
|
式(14)可視為白噪聲激勵的一階線性系統的響應。根據隨機振動理論,可知時域路面不平度功率譜密度 如式(15)所示:
|
式中,H(ω) 為頻響函數,Sω 為白噪聲 W(t) 功率譜密度,取 Sω = 1,代入式(15)中化簡可得頻域響應函數 H(ω),如式(16)所示,j 為虛數單位,時域路面不平度的狀態方程如(17)所示:
|
|
式中,W(t) 為均值為零的高斯(Gauss)白噪聲,q(t) 為路面隨機高程,單位為 m,n0 為參考空間頻率,n00 為下截至空間頻率。根據式(17)在數學計算軟件可視化仿真工具 Simulink(MathWorks Inc,美國)中搭建仿真模型,將 Gauss 白噪聲 W(t) 作為輸入,其余相關參數代入仿真模型中,即可獲得隨機高程。
5.1.2 振動加權均方根加速度值模型的建立
隨機高程作為振動加權均方根加速度值分析的基礎,下文需要建立隨機高程的仿真模型來求解隨機高程。隨機高程是基于速度與路面情況的時域響應輸出,作為整體外骨骼足部機構的振動輸入激勵。依照文獻[27]中的功率譜密度,把路面分成 8 級,A~H 級信號為路況復雜程度,等級越靠后,路況越復雜,各級路面的不平度系數的取值范圍如表 4 所示。
考慮到外骨骼工作環境的復雜性,將路面等級選取為 G 級。通過式(17),借助于數學計算軟件可視化仿真工具 Simulink 模塊(MathWorks Inc,美國),仿真得到隨機路面高程。為驗證該路面高程信號的正確性,需生成 B 級路面高程,驗證 B 級路面高程的不平度功率譜密度,該 B 級路面高程的曲線如圖 7 左圖所示,振動輸入激勵 G 級路面高程的曲線如圖 7 右圖所示。
圖7
B 級與 G 級的路面高程
Figure7.
Class B and class G road elevations
根據式(1)與式(17)的振動約束關系,可借助數學計算軟件可視化仿真工具 Simulink(MathWorks Inc,美國)建立足部機構的振動仿真模型框圖,該框圖如圖 8 所示。
圖8
Simulink 仿真模型
Figure8.
Simulink simulation model
圖 8 中出現字符與公式中字符意義相同,v1 為 m1 的速度,a1 為 m1 的加速度,v2 為 m2 的速度,a2 為 m2 的加速度,v3 為路面隨機高程的一階導數,x3 為隨機路面高程。將 x3 與振動參數輸入如圖 8 所示的仿真模型中,即可獲得傳入足部的加速度值 a2。將該加速度值 a2 代入式(10)中,可計算足部的振動加權均方根加速度值。
5.2 仿真誤差分析
功率譜密度的定義是單位頻帶內的“功率”(均方值),功率譜密度是結構在隨機動態載荷激勵下響應的統計結果,在此用于評價隨機路面高程結果的正確性。參考路面不平度功率譜的國際標準[23],對數學計算軟件 MATLAB R2014a(MathWorks Inc,美國)生成的 B 級路面不平度功率譜進行仿真誤差分析,分析結果如圖 9 所示。
圖9
路面不平度功率譜曲線
Figure9.
Curve of power spectrum of road roughness
從圖 9 可以看出,在數學計算軟件 MATLAB R2014a(MathWorks Inc, 美國)中生成時域路面不平度,能夠較好地逼近目標譜密度曲線,滿足譜一致準則(模擬譜密度曲線下方的面積與目標譜曲線下方的面積近似相等[28]),因此證明生成的隨機高程是正確的。
6 結果的驗證
將優化后的振動參數代入圖 8 所示的仿真模型中,計算外骨骼足部機構的振動加權均方根加速度值,對于 5 個支撐狀態下的加速度仿真結果如圖 10 所示。
圖10
各支撐方式的加速度
Figure10.
Acceleration at each support mode
將圖 10 中的加速度值代入式(10)中,即可獲得各支撐狀態下振動加權均方根加速度值,具體數值如表 5 所示,結果表明,各支撐狀態下振動加權均方根加速度值均小于 0.315 m/s2且大于 0.05 m/s2,滿足舒適性約束條件,振動參數的優化結果是合理的,而且該足部機構能夠滿足減振性舒適性指標。
7 結論
本文提出了一種用于提高外骨骼足部舒適性的足部機構,研究了該外骨骼足部機構的減振性能,并得出以下結論:
(1)本文基于步態周期的足底受力特點,建立了外骨骼足部機構物理模型,進而簡化出振動模型,提煉出振動參數,為減振分析提供了理論基礎。
(2)本文通過分析振動參數對絕對傳遞率的影響規律,為振動參數的優化提供了約束條件與目標函數。
(3)本文針對足部舒適性設計,將絕對傳遞率取最小值與振動加權均方根加速度值控制在 0.05~0.315 m/s2范圍內作為舒適性約束條件,這些設計約束條件對于同類足部舒適性的設計具有參考意義。
(4)本文對于足部機構的舒適性設計提出了一整套設計方法,首先構建數學模型(本文以 2 自由度有阻尼的振動系統作為減振數學模型),再用物理模型實現數學模型(本文提出外骨骼足部機構的構型);然后用物理模型修正數學模型(本文基于步態周期的受力特點,劃分了 5 個振動模型),通過數學模型提取數學規律(本文列出了振動方程),基于約束條件優化數值參數(本文以絕對傳遞率和振動加權均方根加速度值來優化振動參數),利用評價指標驗證數值參數(本文驗證舒適性條件);最后將數值參數用于確定物理模型,將物理模型制造出機構,完成實驗的驗證。該設計方法對于絕大部分的機構設計具有普遍的借鑒意義。
利益沖突聲明:本文全體作者均聲明不存在利益沖突。