康復機器人研究正在發生著快速變化,越來越多的國家(地區)參與到國際科研合作而貢獻出研究成果。本文采用文獻計量方法研究我國康復機器人國際科研合作現狀和趨勢。以 2000 年—2019 年間 Web of Science 康復機器人主題文獻為數據源,分析研究全球國際科研合作情況,采用合作度、合作率以及被引頻次等指標,研究我國康復機器人文獻國際合作特點、國際合作的重要研究機構及其合作模式。結果表明近 20 年來我國在該領域的科研合作從起步到提升,呈現良好的發展態勢,我國在康復機器人領域科技論文的國際影響力和國際協作程度顯示出正相關性,參與國際協作對于國際影響力提升有積極作用。美國、英國和日本成為與我國合作最為活躍的國家。本文研究為科研人員更好地了解我國在康復機器人方面的國際科研合作提供了信息和參考。
引用本文: 張瑩, 劉笑宇, 樊瑜波. 2000年—2019年中國康復機器人國際科研合作文獻計量分析. 生物醫學工程學雜志, 2020, 37(4): 602-607. doi: 10.7507/1001-5515.202005006 復制
版權信息: ?四川大學華西醫院華西期刊社《生物醫學工程學雜志》版權所有,未經授權不得轉載、改編
引言
隨著全球老齡化程度不斷加深,各國對社會養老、康復訓練和健康輔助治療[1-3]需求明顯增加,康復機器人研究得到越來越多的關注[4-6]。作為生物醫學工程的重要分支,康復機器人融合了康復醫學、工程學、神經科學、計算機科學、心理學等多個學科,將工程與醫學緊密結合,加強了工程技術在臨床上的應用。由于機器人康復和輔助治療具有能夠提供持續、高強度、可重復治療的潛力[7],在脊髓損傷、中風、創傷性腦損傷、截肢、慢性疼痛、運動損傷等疾病的康復治療中表現出顯著優勢,臨床康復的有效性已得到充分驗證,具有重要的實用價值。近年來,康復機器人基礎研究和臨床應用水平的提升得益于社會需求增加、產業政策的支持以及新一代信息技術應用,越來越多的研究機構參與到康復機器人的研究中并產生了較好的研究成果。
隨著科學技術的快速變化,知識動態的增長,研究的高度專業化,單個科研工作者或研究團隊較難掌握所有專業知識和資源以解決復雜研究問題。為了共享資源和發揮各自技術優勢,全球范圍開展著積極的科研交流和合作,科研合作已成為促進科研工作創新和進步的有效方式。研究表明大量科研合作存在于科研機構、政府、非政府組織、企業之間,并圍繞專業領域開展跨區域的國際合作。雖然科研合作能夠加深研究人員信息流通、資源共享,而且合作方技術、方法的結合能實現優勢互補,發揮出技術優勢[8],但是僅憑文化或語言相似性、地理鄰近性等建立聯系[9]還不能滿足國際化的需求。為了提高國際科研合作交流的效果,國內外研究者圍繞國際科研合作模式、科研合作網絡關系以及國際合作與國際地位和影響力關系研究等領域開展了卓有成效的工作,通過研究國際合作網絡的指標數值和變化來分析國際科研合作的特點和趨勢。在合作網絡模型建立方面,Yamashita 等[10]基于蒙特卡洛方法提出用于衡量科學聯系的概率伙伴關系指數(Probabilistic Partnership Index,PPI),模擬出日本和法國之間的合作網絡模型。Aman[11]研究了德國國際合作出版特點以及合著出版物的引用行為特征,研究表明德國與國際合作出版物數量增加明顯提升了出版物的被引頻次。研究表明,文獻計量學具有指標定量分析的優勢,通過論文產出率和論文影響力指標,評估國家科研競爭力水平,以及高被引作者促進國際間合作和提升國家科研影響力的作用[12]。針對科研競爭力的提高是否伴隨著中國國際合作加強的問題,Zhou 等[13]研究了中國開展國際合作的動力和特征,發現國際合作提升了影響因子但是對國際影響力提升還不足。研究人員分析了科研貢獻和科研合作出版物的引文指標,發現國際科學合作對發展中國家的快速提升較為有利,而發達國家也可以從中受益[14]。科研機構和產業界之間的密切合作,如知識產權和技術的轉讓,提升和加強了企業經濟活力和競爭力[15]。隨著科研投入持續增加和產業需求增長,我國科研水平從起步到逐漸提升,在一些國際前沿熱點領域已取得重要進展。為了研究我國在康復機器人領域國際科研合作和科研影響力的關系,本文從文獻計量學視角,研究分析文獻計量指標,揭示我國國際科研合作特點和趨勢。首先介紹全球康復機器人領域國際科研合作現狀;其次,分析我國參與國際科研合作的特點、主要科研機構及其合作模式;最后討論我國在該領域國際合作和國際影響力提升的影響因素并提出建議。
1 基本原理
1.1 概念和定義
科學研究的目的是解決復雜科研問題,科學專業化的趨勢推動了多學科合作,科研合作匯集了促進科學發展所需的知識、技能和能力[16]。通常科學研究工作會形成多個分布在各地的學術研究中心,多學科研究中心間建立協作是必需的。國際科研合作定義為在一定的科研領域,科研方向基本一致或部分一致,研究行為主體之間進行的跨國(境)科研協作行為[17]。跨國(境)科研合作可表現為國家(地區)研究人員間合作撰寫科技論文的行為。在文獻計量領域常見的表征科學合作程度的指標有合作率與合作度。合作度是指每篇發表論文平均作者數,合作度越高表明每篇論文平均合著者也就越多,是揭示論文合作深度的重要量值。合作率是指合作論文數占全部已產出論文的比率,是反映論文合作廣度的量值。國際合作率表明國際合著論文產出占自身全部產出的比重大小。
1.2 文獻計量
文獻計量學是利用數學和統計學方法分析研究文獻的分布結構、數量關系和變化規律的學科領域,可以用來研究出版物模式[18]、跟蹤學術進展和研究科學發展軌跡[19]。論文引用率是指科學論文對已發表文獻的引用次數,是衡量一個國家(地區)科研文獻在其他國家(地區)或機構的認可度和科研生產力水平的指標。研究表明不同科學領域及其子領域存在文獻引用行為差異,因此需要在文獻引證與其被引證現象的研究過程中,考慮使用圖論、模糊集合、數理統計等數學方法和基本邏輯,選用合適的方法和指標來探測文獻所蘊含的科學信息和科學演變軌跡,揭示一個知識領域研究的前沿現狀和發展進程[20-21]。
2 數據和方法
本文選擇科學引文索引數據庫(Web of Science,WoS)作為信息源構建數據集。在 Web of Science TM core collection(核心合集)中,以“rehabilitation robot*”為主題詞進行檢索,文獻類型選擇為“article”,檢索時間設定為“2000-2019”,最終檢索出 3 166 條文獻及其所引用的 16 023 條引文文獻數據。導出文獻記錄為全記錄及參考文獻,記錄包括出版時間、作者、機構、國家(地區)等基本屬性。本文采用文獻計量學的方法對檢索出的 3 166 篇康復機器人文獻進行文獻計量和評估分析,以國家(地區)和機構為分析對象,通過分析發文量、被引頻次、平均被引頻次[22]等指標,進行科研合作分析[23]。由于研究模式的差異,本文所涉及的中國論文數據未考慮中國臺灣數據。
3 結果分析
3.1 國際科研合作情況分析
從科技論文出版趨勢看,康復機器人領域論文發表數目和論文國際合著數量呈現出隨年份增加的正相關性。研究 Web of Science 中發文量前 10 國家(地區)的國際科研開展情況,綜合比較分析各國發文量、施引文獻、被引頻次、合作度以及國際合作率指標,如表 1 所示。結果顯示,與數據集中排名前 10 的國家平均發文量 307 篇相比,我國發文量 429 篇高于該平均水平,在康復機器人領域發文量占據優勢。從全球范圍看,3 166 篇中有 1 677 篇論文參與了國家(地區)間合作,國際平均合作率為 50.10%。在國際合著論文中,國際合作率排列前 5 位的國家(地區)均來自歐盟國家,其中英國 70.50%、瑞士 58.50%、德國 52.60%、西班牙 46.40%、意大利 40.20%。英國是參與國際合作最活躍的國家(地區)之一,有超過 70%的論文是國際合著論文。德國和瑞士也有 50%以上是國際合著論文。可以看出歐盟成員國論文國際合著程度較高,國際合作較為普遍。分析其現象產生原因,可能與歐洲的地理鄰近因素、文化和語言相近,以及鼓勵促進內部研究人員流動刺激政策措施有關,例如一些跨國(境)研究項目在歐洲計劃框架下得以實施。因此,在地理和語言背景相似的國家(地區)間國際合作更有優勢,合作程度也更高。與歐盟國家和北美國家相比,包括中國、日本、韓國在內的所有主要亞洲國家(地區)的國際合作率均低于 40%,普遍低于歐盟國家。
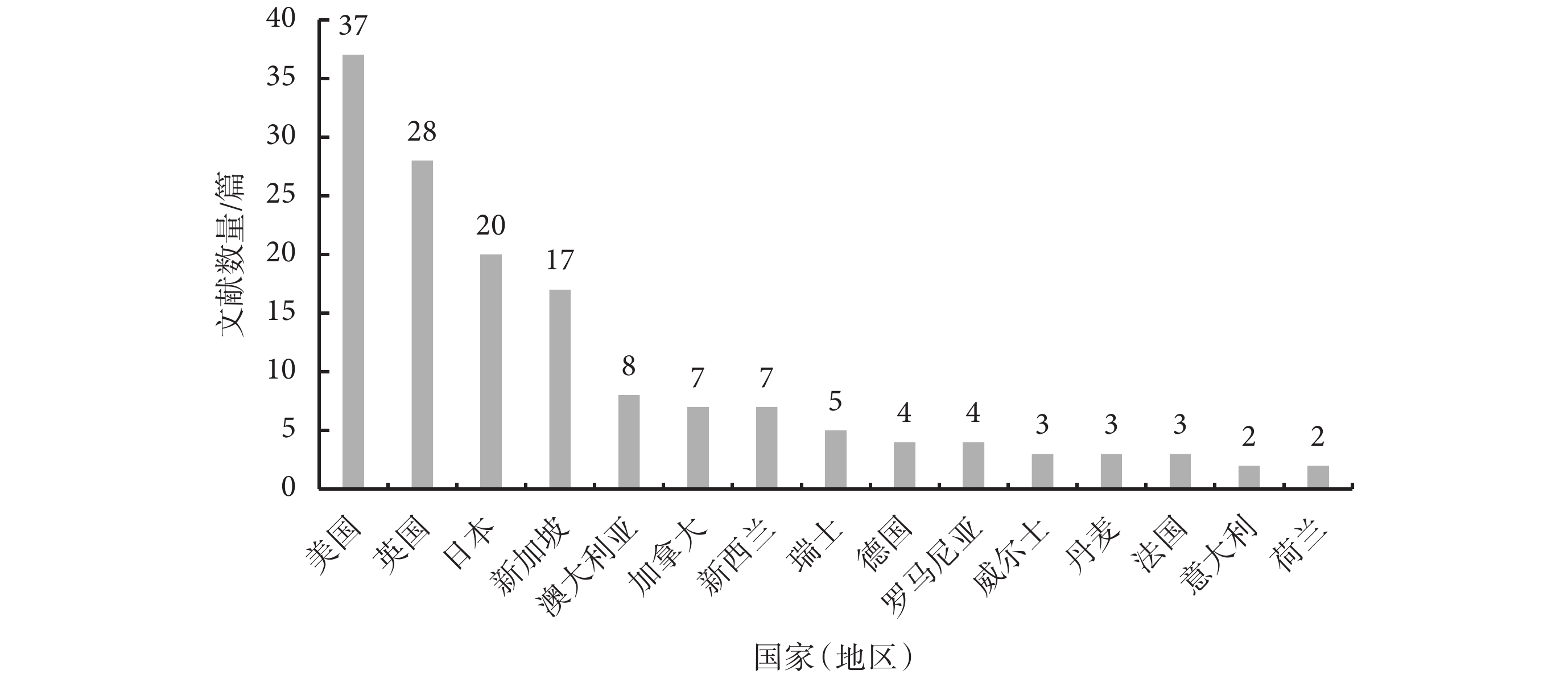
與我國國際合作論文數排前 15 的國家(地區)如圖 1 所示。從圖中可以看出,我國與大多數發達國家(地區)有合著論文發表。合著者主要來自美國、英國、日本、新加坡、澳大利亞、加拿大、新西蘭,其中與美國的合作最多,為 37 篇。我國國際合著論文中超過 68%與來自美國、英國、日本、新加坡、澳大利亞五個國家(地區)的作者共同撰寫發表論文。
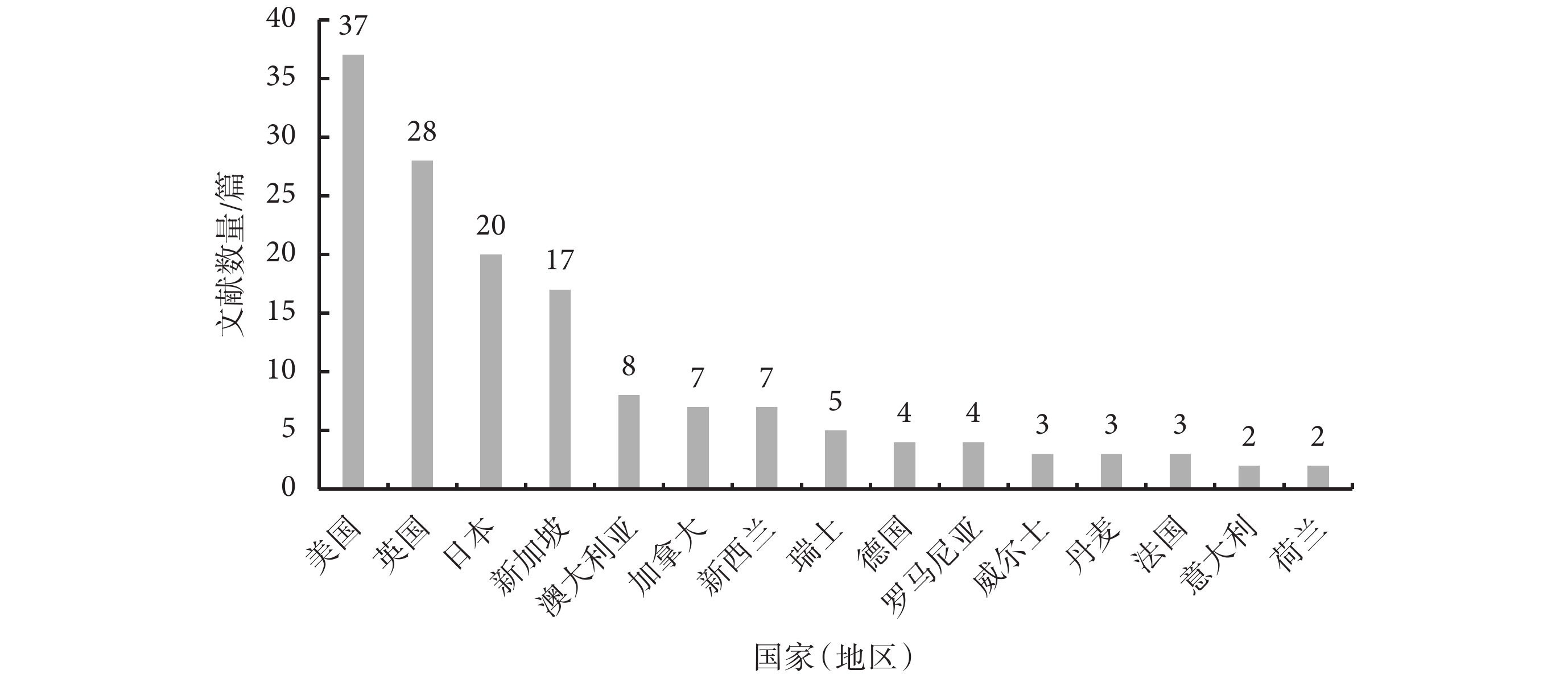 圖1
2000 年—2019 年我國康復機器人論文國際合著數量前 15 位的國家(地區)
Figure1.
The top 15 countries(regions)in co-authored paper with China in rehabilitation robot from 2000 to 2019
圖1
2000 年—2019 年我國康復機器人論文國際合著數量前 15 位的國家(地區)
Figure1.
The top 15 countries(regions)in co-authored paper with China in rehabilitation robot from 2000 to 2019
3.2 我國國際科研合作特點分析
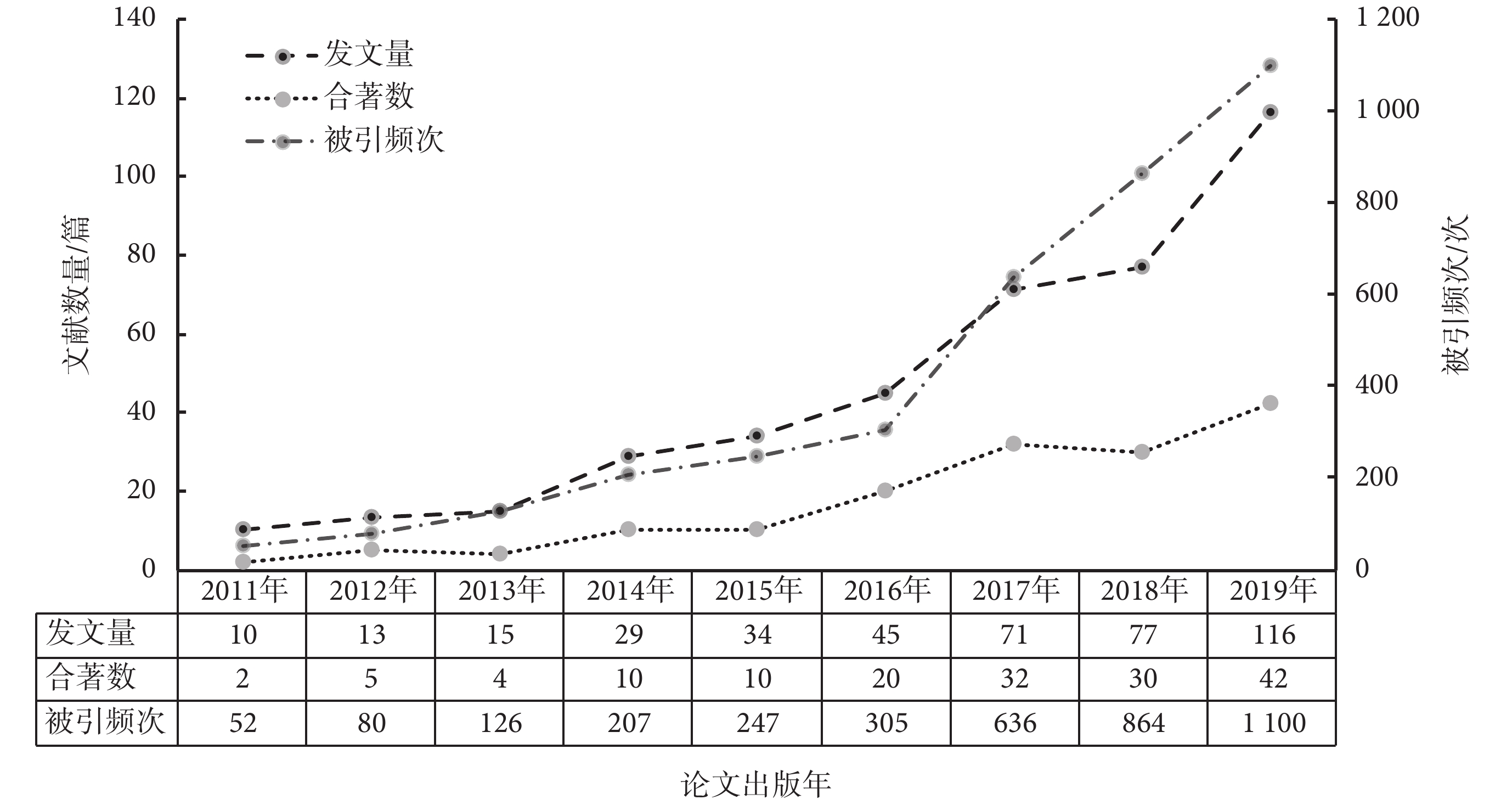
我國論文發表數量和國際合作開展情況如圖 2 所示,顯示出我國康復機器人領域呈現線性遞增的趨勢,但是我國國際合著的增長率低于論文發表率,說明我國的國際科研合作活動有待于進一步提升。以國際合著論文的發表作為參考,可以看出我國與其他國家(地區)在康復機器人科研領域的合作起步于 2007 年,與亞洲鄰國(如日本、新加坡)開展了較高質量的國際合作,發表了高被引頻次論文。然而,我國與康復機器人研究強國(如意大利、瑞士、西班牙等)的合作還較少,尚未建立穩定的國際合作網絡。研究發現我國的國際合著論文數量逐漸增加,但是合作對象的穩定性不足,尚未形成長期廣泛的深度合作,國際科研合作的開展經歷了由不固定到逐漸穩定的過程,到 2011 年論文發表量每年穩定在 10 篇以上。在合作率分析方面,我國 429 篇論文中有 161 篇參與國家(地區)合作,合作率為 37.50%,但是仍低于國際合作率平均值 50.10%。從每年被引頻次可以看出,2016 年之后被引頻次數值呈現較大的增幅,從 2011 年的 52 次,上升到 2019 年的 1 100 次,說明在這幾年發布的研究成果影響力較之前有明顯提升。被引頻次和合著數的變化趨勢以及發文量的增速與被引頻次變化均呈現出正相關性,說明研究成果影響力的提升與發文量和國際合著數的相關性比較明顯,其中與發文總量的相關性更大。
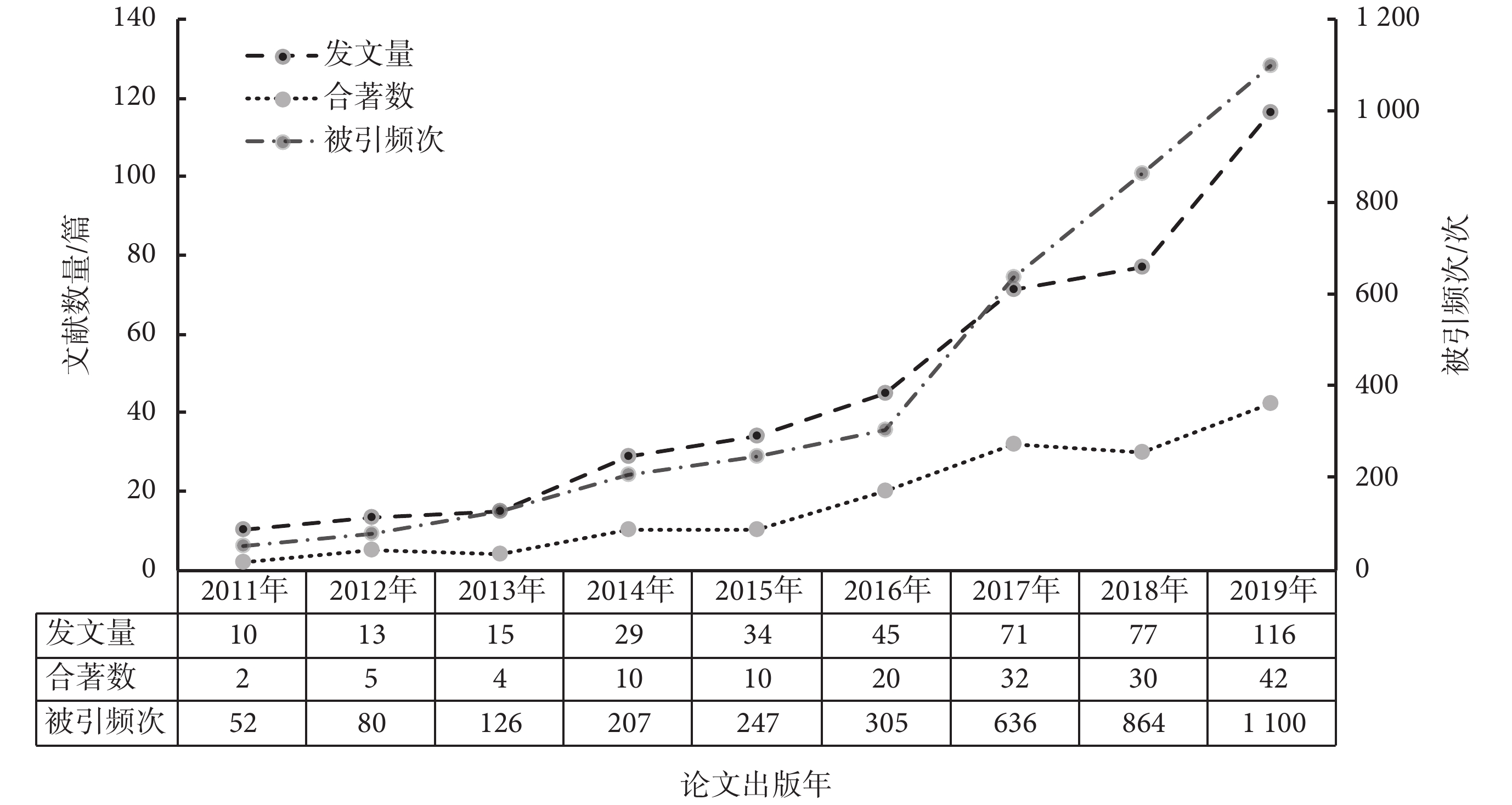 圖2
2011 年—2019 年我國國際合著論文數量和被引頻次趨勢
Figure2.
Trend of international co-authored papers and citations in China from 2011 to 2019
圖2
2011 年—2019 年我國國際合著論文數量和被引頻次趨勢
Figure2.
Trend of international co-authored papers and citations in China from 2011 to 2019
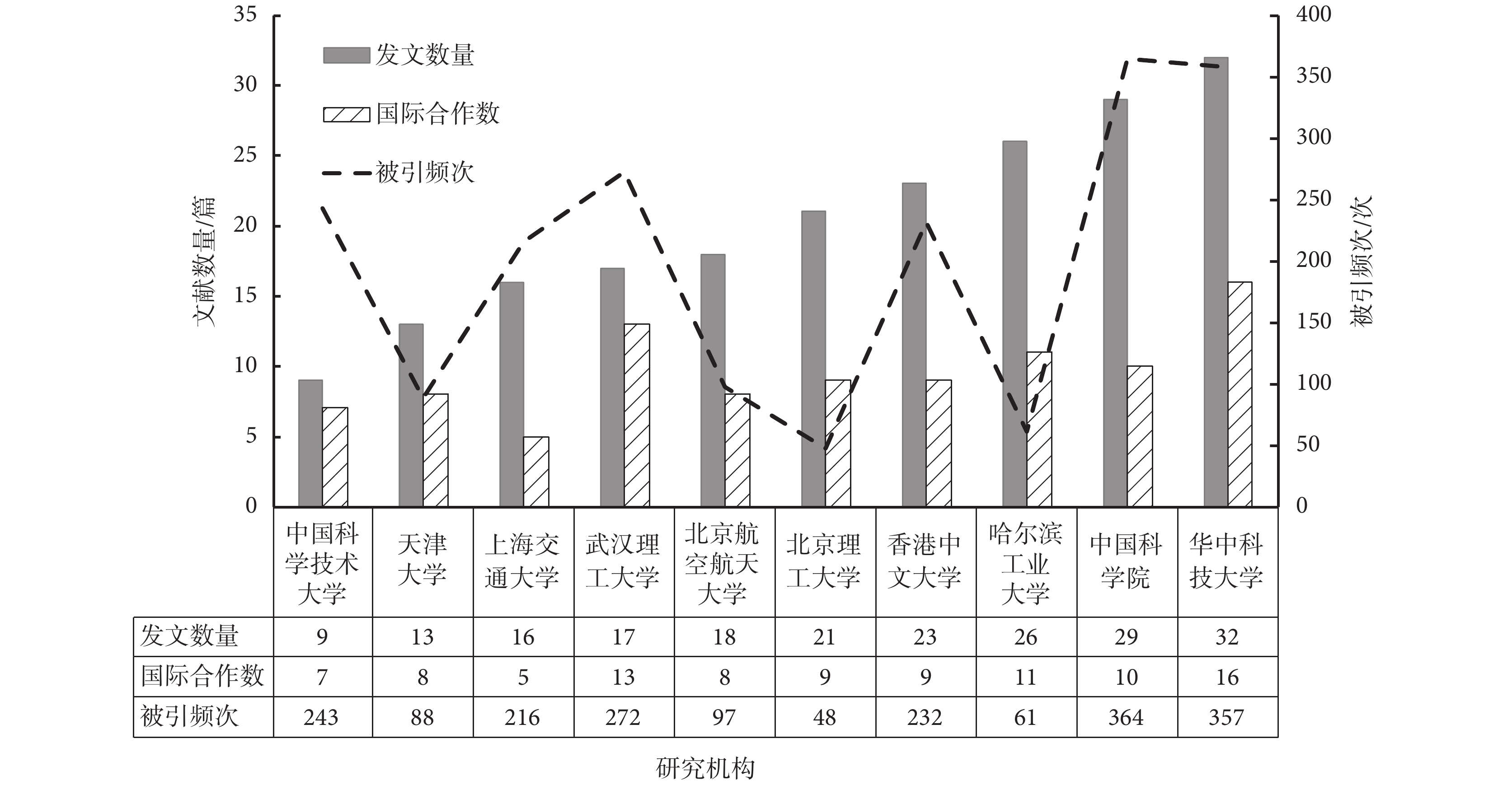
為了研究國內科研機構參與國際合作的情況,本文按照國際合著論文的數量列出前 10 的研究機構如圖 3 所示,在所有國際合著論文中至少有一篇文章第一作者單位為國內研究機構。結果顯示中國科學技術大學、中國科學院、北京航空航天大學、上海交通大學、武漢理工大學等研究機構開展了積極有效的國際科研合作。研究還發現被引頻次較高的文獻體現出了國際科研合作的效果。如:武漢理工大學和新西蘭奧克蘭大學(University of Auckland)在機器人輔助下肢康復的機制和控制策略方面開展科研合作交流,2015 年發表了“Recent development of mechanisms and control strategies for robot-assisted lower limb rehabilitation”[24],在 Web of Science 中被引頻次達到 119。上海交通大學與美國歐道明大學(Old Dominion University)合作,2012 年在IEEE Transactions on Information Technology in Biomedicine期刊上發表了“EMG and EPP-integrated human-machine interface between the paralyzed and rehabilitation exoskeleton”[25],文章研究康復機器人外骨骼,在 Web of Science 中被引頻次達到 111 次。電子科技大學與新加坡國立大學(National University of Singapore)合作發表康復機器人神經網絡控制論文“Neural network control of a rehabilitation robot by state and output feedback”[26],引用頻次達到 110 次。可見,國際聯合培養科研人員以及積極參與國際學術組織和國際科研項目合作等國際合作模式,對國際影響力提升產生了積極的影響。
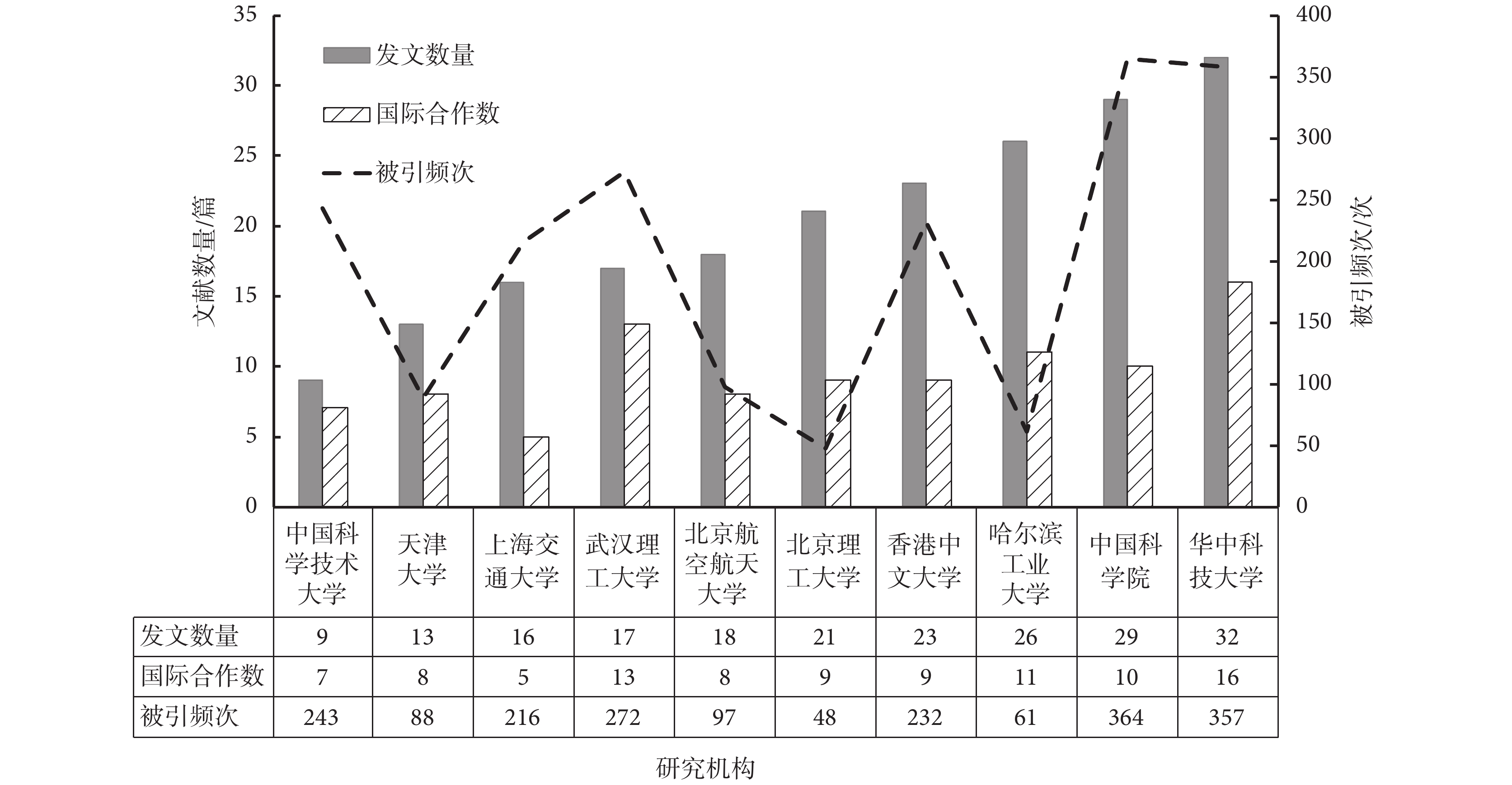 圖3
我國國際合作發文量前 10 機構
Figure3.
Top 10 institutes in international co-authored paper publication
圖3
我國國際合作發文量前 10 機構
Figure3.
Top 10 institutes in international co-authored paper publication
4 結論與討論
本文采用文獻計量分析的方法研究了 Web of Science 中的康復機器人文獻,分析了全球背景下中國參與國際合作的特點,以及中國科研機構參與國際科研合作的現狀及趨勢。我國在康復機器人領域起步較晚,與領先國家美國、意大利、日本等還存在著差距。與發達國家相比,我國科研論文發文數量多是影響力提升的明顯優勢,而里程碑式論文還明顯不足,論文被引頻次和影響力有待于提升。從文獻合著角度看,我國與美國、英國、日本開展的科研合作最多。國內研究機構從 2007 年開始有文獻記錄參與到國際科研合作中,其中中國科學技術大學、中國科學院、北京航空航天大學、上海交通大學、武漢理工大學等較為活躍。從 2007 年起步以后積極開展國際合作至今,我國在康復機器人領域的國際科研合作進入了增長的區間,國際合著論文的引文影響力已逐步顯現出來。研究顯示我國國際影響力和國際化程度成正相關特點,論文國際合作趨勢和論文發表數量趨勢相比還有提升潛力,體現在國際合著者文獻數量的增長速度并沒有趕上整體文獻增長速度,也就是說我國研究產出的增長與國際合作的加強和影響力提升并不同步。國際合作增加了中國的整體引文影響力,但是這種提高還不具備代表性,需要與國際影響力強的機構開展更為深入的合作,緊跟前沿技術進展,主動吸引國際創新力量和資源,加強與發達國家(地區)的合作。例如,需要加強與國際頂尖機構、頂尖技術公司的合作,探索在康復中心、研究機構、企業間建立合作機制和合作渠道的有效模式。從國際影響力看,研究機構目前在康復機器人工程研究方面已經具有初步的國際影響力,已經有里程碑文獻發表,而工程與臨床應用深度融合的研究,如臨床應用隨機對照試驗等方面尚未見到有國際影響力的文獻,是需要提升的方向。目前科研評價導向對科研論文質量和影響力的重視將有助于科研影響力的提升。
本研究工作僅從文獻計量學角度表明在基礎科研和教育方面的國際合作特點,顯示出我國康復機器人參與國際論文合作的機構以高校和科研院所為主。此外,從專利、項目合作、企業投融資等角度研究康復機器人國際合作也將非常有研究價值。本文所探討的國際化合作和科研影響力的關系,以及我國康復機器人參與國際科研合作的現狀和趨勢,為研究我國國際康復機器人科技規劃和國際合作發展路徑提供了參考,為科研人員實現科研合作和科研影響力的提升提供了建議和思考。
利益沖突聲明:本文全體作者均聲明不存在利益沖突。
引言
隨著全球老齡化程度不斷加深,各國對社會養老、康復訓練和健康輔助治療[1-3]需求明顯增加,康復機器人研究得到越來越多的關注[4-6]。作為生物醫學工程的重要分支,康復機器人融合了康復醫學、工程學、神經科學、計算機科學、心理學等多個學科,將工程與醫學緊密結合,加強了工程技術在臨床上的應用。由于機器人康復和輔助治療具有能夠提供持續、高強度、可重復治療的潛力[7],在脊髓損傷、中風、創傷性腦損傷、截肢、慢性疼痛、運動損傷等疾病的康復治療中表現出顯著優勢,臨床康復的有效性已得到充分驗證,具有重要的實用價值。近年來,康復機器人基礎研究和臨床應用水平的提升得益于社會需求增加、產業政策的支持以及新一代信息技術應用,越來越多的研究機構參與到康復機器人的研究中并產生了較好的研究成果。
隨著科學技術的快速變化,知識動態的增長,研究的高度專業化,單個科研工作者或研究團隊較難掌握所有專業知識和資源以解決復雜研究問題。為了共享資源和發揮各自技術優勢,全球范圍開展著積極的科研交流和合作,科研合作已成為促進科研工作創新和進步的有效方式。研究表明大量科研合作存在于科研機構、政府、非政府組織、企業之間,并圍繞專業領域開展跨區域的國際合作。雖然科研合作能夠加深研究人員信息流通、資源共享,而且合作方技術、方法的結合能實現優勢互補,發揮出技術優勢[8],但是僅憑文化或語言相似性、地理鄰近性等建立聯系[9]還不能滿足國際化的需求。為了提高國際科研合作交流的效果,國內外研究者圍繞國際科研合作模式、科研合作網絡關系以及國際合作與國際地位和影響力關系研究等領域開展了卓有成效的工作,通過研究國際合作網絡的指標數值和變化來分析國際科研合作的特點和趨勢。在合作網絡模型建立方面,Yamashita 等[10]基于蒙特卡洛方法提出用于衡量科學聯系的概率伙伴關系指數(Probabilistic Partnership Index,PPI),模擬出日本和法國之間的合作網絡模型。Aman[11]研究了德國國際合作出版特點以及合著出版物的引用行為特征,研究表明德國與國際合作出版物數量增加明顯提升了出版物的被引頻次。研究表明,文獻計量學具有指標定量分析的優勢,通過論文產出率和論文影響力指標,評估國家科研競爭力水平,以及高被引作者促進國際間合作和提升國家科研影響力的作用[12]。針對科研競爭力的提高是否伴隨著中國國際合作加強的問題,Zhou 等[13]研究了中國開展國際合作的動力和特征,發現國際合作提升了影響因子但是對國際影響力提升還不足。研究人員分析了科研貢獻和科研合作出版物的引文指標,發現國際科學合作對發展中國家的快速提升較為有利,而發達國家也可以從中受益[14]。科研機構和產業界之間的密切合作,如知識產權和技術的轉讓,提升和加強了企業經濟活力和競爭力[15]。隨著科研投入持續增加和產業需求增長,我國科研水平從起步到逐漸提升,在一些國際前沿熱點領域已取得重要進展。為了研究我國在康復機器人領域國際科研合作和科研影響力的關系,本文從文獻計量學視角,研究分析文獻計量指標,揭示我國國際科研合作特點和趨勢。首先介紹全球康復機器人領域國際科研合作現狀;其次,分析我國參與國際科研合作的特點、主要科研機構及其合作模式;最后討論我國在該領域國際合作和國際影響力提升的影響因素并提出建議。
1 基本原理
1.1 概念和定義
科學研究的目的是解決復雜科研問題,科學專業化的趨勢推動了多學科合作,科研合作匯集了促進科學發展所需的知識、技能和能力[16]。通常科學研究工作會形成多個分布在各地的學術研究中心,多學科研究中心間建立協作是必需的。國際科研合作定義為在一定的科研領域,科研方向基本一致或部分一致,研究行為主體之間進行的跨國(境)科研協作行為[17]。跨國(境)科研合作可表現為國家(地區)研究人員間合作撰寫科技論文的行為。在文獻計量領域常見的表征科學合作程度的指標有合作率與合作度。合作度是指每篇發表論文平均作者數,合作度越高表明每篇論文平均合著者也就越多,是揭示論文合作深度的重要量值。合作率是指合作論文數占全部已產出論文的比率,是反映論文合作廣度的量值。國際合作率表明國際合著論文產出占自身全部產出的比重大小。
1.2 文獻計量
文獻計量學是利用數學和統計學方法分析研究文獻的分布結構、數量關系和變化規律的學科領域,可以用來研究出版物模式[18]、跟蹤學術進展和研究科學發展軌跡[19]。論文引用率是指科學論文對已發表文獻的引用次數,是衡量一個國家(地區)科研文獻在其他國家(地區)或機構的認可度和科研生產力水平的指標。研究表明不同科學領域及其子領域存在文獻引用行為差異,因此需要在文獻引證與其被引證現象的研究過程中,考慮使用圖論、模糊集合、數理統計等數學方法和基本邏輯,選用合適的方法和指標來探測文獻所蘊含的科學信息和科學演變軌跡,揭示一個知識領域研究的前沿現狀和發展進程[20-21]。
2 數據和方法
本文選擇科學引文索引數據庫(Web of Science,WoS)作為信息源構建數據集。在 Web of Science TM core collection(核心合集)中,以“rehabilitation robot*”為主題詞進行檢索,文獻類型選擇為“article”,檢索時間設定為“2000-2019”,最終檢索出 3 166 條文獻及其所引用的 16 023 條引文文獻數據。導出文獻記錄為全記錄及參考文獻,記錄包括出版時間、作者、機構、國家(地區)等基本屬性。本文采用文獻計量學的方法對檢索出的 3 166 篇康復機器人文獻進行文獻計量和評估分析,以國家(地區)和機構為分析對象,通過分析發文量、被引頻次、平均被引頻次[22]等指標,進行科研合作分析[23]。由于研究模式的差異,本文所涉及的中國論文數據未考慮中國臺灣數據。
3 結果分析
3.1 國際科研合作情況分析
從科技論文出版趨勢看,康復機器人領域論文發表數目和論文國際合著數量呈現出隨年份增加的正相關性。研究 Web of Science 中發文量前 10 國家(地區)的國際科研開展情況,綜合比較分析各國發文量、施引文獻、被引頻次、合作度以及國際合作率指標,如表 1 所示。結果顯示,與數據集中排名前 10 的國家平均發文量 307 篇相比,我國發文量 429 篇高于該平均水平,在康復機器人領域發文量占據優勢。從全球范圍看,3 166 篇中有 1 677 篇論文參與了國家(地區)間合作,國際平均合作率為 50.10%。在國際合著論文中,國際合作率排列前 5 位的國家(地區)均來自歐盟國家,其中英國 70.50%、瑞士 58.50%、德國 52.60%、西班牙 46.40%、意大利 40.20%。英國是參與國際合作最活躍的國家(地區)之一,有超過 70%的論文是國際合著論文。德國和瑞士也有 50%以上是國際合著論文。可以看出歐盟成員國論文國際合著程度較高,國際合作較為普遍。分析其現象產生原因,可能與歐洲的地理鄰近因素、文化和語言相近,以及鼓勵促進內部研究人員流動刺激政策措施有關,例如一些跨國(境)研究項目在歐洲計劃框架下得以實施。因此,在地理和語言背景相似的國家(地區)間國際合作更有優勢,合作程度也更高。與歐盟國家和北美國家相比,包括中國、日本、韓國在內的所有主要亞洲國家(地區)的國際合作率均低于 40%,普遍低于歐盟國家。
與我國國際合作論文數排前 15 的國家(地區)如圖 1 所示。從圖中可以看出,我國與大多數發達國家(地區)有合著論文發表。合著者主要來自美國、英國、日本、新加坡、澳大利亞、加拿大、新西蘭,其中與美國的合作最多,為 37 篇。我國國際合著論文中超過 68%與來自美國、英國、日本、新加坡、澳大利亞五個國家(地區)的作者共同撰寫發表論文。
圖1
2000 年—2019 年我國康復機器人論文國際合著數量前 15 位的國家(地區)
Figure1.
The top 15 countries(regions)in co-authored paper with China in rehabilitation robot from 2000 to 2019
3.2 我國國際科研合作特點分析
我國論文發表數量和國際合作開展情況如圖 2 所示,顯示出我國康復機器人領域呈現線性遞增的趨勢,但是我國國際合著的增長率低于論文發表率,說明我國的國際科研合作活動有待于進一步提升。以國際合著論文的發表作為參考,可以看出我國與其他國家(地區)在康復機器人科研領域的合作起步于 2007 年,與亞洲鄰國(如日本、新加坡)開展了較高質量的國際合作,發表了高被引頻次論文。然而,我國與康復機器人研究強國(如意大利、瑞士、西班牙等)的合作還較少,尚未建立穩定的國際合作網絡。研究發現我國的國際合著論文數量逐漸增加,但是合作對象的穩定性不足,尚未形成長期廣泛的深度合作,國際科研合作的開展經歷了由不固定到逐漸穩定的過程,到 2011 年論文發表量每年穩定在 10 篇以上。在合作率分析方面,我國 429 篇論文中有 161 篇參與國家(地區)合作,合作率為 37.50%,但是仍低于國際合作率平均值 50.10%。從每年被引頻次可以看出,2016 年之后被引頻次數值呈現較大的增幅,從 2011 年的 52 次,上升到 2019 年的 1 100 次,說明在這幾年發布的研究成果影響力較之前有明顯提升。被引頻次和合著數的變化趨勢以及發文量的增速與被引頻次變化均呈現出正相關性,說明研究成果影響力的提升與發文量和國際合著數的相關性比較明顯,其中與發文總量的相關性更大。
圖2
2011 年—2019 年我國國際合著論文數量和被引頻次趨勢
Figure2.
Trend of international co-authored papers and citations in China from 2011 to 2019
為了研究國內科研機構參與國際合作的情況,本文按照國際合著論文的數量列出前 10 的研究機構如圖 3 所示,在所有國際合著論文中至少有一篇文章第一作者單位為國內研究機構。結果顯示中國科學技術大學、中國科學院、北京航空航天大學、上海交通大學、武漢理工大學等研究機構開展了積極有效的國際科研合作。研究還發現被引頻次較高的文獻體現出了國際科研合作的效果。如:武漢理工大學和新西蘭奧克蘭大學(University of Auckland)在機器人輔助下肢康復的機制和控制策略方面開展科研合作交流,2015 年發表了“Recent development of mechanisms and control strategies for robot-assisted lower limb rehabilitation”[24],在 Web of Science 中被引頻次達到 119。上海交通大學與美國歐道明大學(Old Dominion University)合作,2012 年在IEEE Transactions on Information Technology in Biomedicine期刊上發表了“EMG and EPP-integrated human-machine interface between the paralyzed and rehabilitation exoskeleton”[25],文章研究康復機器人外骨骼,在 Web of Science 中被引頻次達到 111 次。電子科技大學與新加坡國立大學(National University of Singapore)合作發表康復機器人神經網絡控制論文“Neural network control of a rehabilitation robot by state and output feedback”[26],引用頻次達到 110 次。可見,國際聯合培養科研人員以及積極參與國際學術組織和國際科研項目合作等國際合作模式,對國際影響力提升產生了積極的影響。
圖3
我國國際合作發文量前 10 機構
Figure3.
Top 10 institutes in international co-authored paper publication
4 結論與討論
本文采用文獻計量分析的方法研究了 Web of Science 中的康復機器人文獻,分析了全球背景下中國參與國際合作的特點,以及中國科研機構參與國際科研合作的現狀及趨勢。我國在康復機器人領域起步較晚,與領先國家美國、意大利、日本等還存在著差距。與發達國家相比,我國科研論文發文數量多是影響力提升的明顯優勢,而里程碑式論文還明顯不足,論文被引頻次和影響力有待于提升。從文獻合著角度看,我國與美國、英國、日本開展的科研合作最多。國內研究機構從 2007 年開始有文獻記錄參與到國際科研合作中,其中中國科學技術大學、中國科學院、北京航空航天大學、上海交通大學、武漢理工大學等較為活躍。從 2007 年起步以后積極開展國際合作至今,我國在康復機器人領域的國際科研合作進入了增長的區間,國際合著論文的引文影響力已逐步顯現出來。研究顯示我國國際影響力和國際化程度成正相關特點,論文國際合作趨勢和論文發表數量趨勢相比還有提升潛力,體現在國際合著者文獻數量的增長速度并沒有趕上整體文獻增長速度,也就是說我國研究產出的增長與國際合作的加強和影響力提升并不同步。國際合作增加了中國的整體引文影響力,但是這種提高還不具備代表性,需要與國際影響力強的機構開展更為深入的合作,緊跟前沿技術進展,主動吸引國際創新力量和資源,加強與發達國家(地區)的合作。例如,需要加強與國際頂尖機構、頂尖技術公司的合作,探索在康復中心、研究機構、企業間建立合作機制和合作渠道的有效模式。從國際影響力看,研究機構目前在康復機器人工程研究方面已經具有初步的國際影響力,已經有里程碑文獻發表,而工程與臨床應用深度融合的研究,如臨床應用隨機對照試驗等方面尚未見到有國際影響力的文獻,是需要提升的方向。目前科研評價導向對科研論文質量和影響力的重視將有助于科研影響力的提升。
本研究工作僅從文獻計量學角度表明在基礎科研和教育方面的國際合作特點,顯示出我國康復機器人參與國際論文合作的機構以高校和科研院所為主。此外,從專利、項目合作、企業投融資等角度研究康復機器人國際合作也將非常有研究價值。本文所探討的國際化合作和科研影響力的關系,以及我國康復機器人參與國際科研合作的現狀和趨勢,為研究我國國際康復機器人科技規劃和國際合作發展路徑提供了參考,為科研人員實現科研合作和科研影響力的提升提供了建議和思考。
利益沖突聲明:本文全體作者均聲明不存在利益沖突。