肺動脈下心室曠置術(Fontan)在臨床上能夠有效改善功能性單心室患兒的生存質量,然而術后容易發生 Fontan 循環衰竭,導致臨床施行 Fontan 存在明顯局限,腔-肺輔助裝置(CPAD)是目前解決其局限性的有效手段。因此,本文通過搭建單心室患兒 Fontan 循環衰竭和 CPAD 的計算機仿真和體外實驗耦合模型,評估 CPAD 對于 Fontan 循環衰竭的效果,并設計了一種無傳感器反饋控制算法,用于提供足夠心輸出量和預防 CPAD 恒定血泵轉速導致的腔靜脈抽吸現象。該無傳感器反饋控制算法基于 CPAD 血泵轉速這一固有參數,通過擴展卡爾曼濾波器準確估算腔肺壓力差(CPPH),摒除了壓力傳感器無法長期使用的缺點,并采用增益調度比例積分(PI)控制器,使實際 CPPH 值逼近參考值。結果表明,CPAD 能夠有效提高患兒的生理灌注并減少單心室負荷,并且無傳感器反饋控制算法可以有效地保證心輸出量并預防抽吸現象。本研究可為 CPAD 的設計和優化提供理論依據和技術支持,具有潛在的臨床應用價值。
引用本文: 彭靜, 譚喆歡, 欒永, 覃開蓉, 王宇. 基于肺動脈下心室曠置術腔-肺輔助裝置的建模仿真及無傳感器反饋控制算法研究. 生物醫學工程學雜志, 2021, 38(3): 539-548. doi: 10.7507/1001-5515.202008005 復制
版權信息: ?四川大學華西醫院華西期刊社《生物醫學工程學雜志》版權所有,未經授權不得轉載、改編
引言
功能性單心室是一類復雜的先天性心臟病[1]。根據患兒單心室的分型和病理生理改變,臨床上主要有兩種治療方案:心臟移植[2]和肺動脈下心室曠置術(Fontan)[3-4]。雖然效果不及成人心衰患者[5],心臟移植仍是單心室患兒最佳的治療方案。然而,由于心臟供體數量有限[6],心臟移植無法成為常規治療方法,Fontan 這種姑息性療法成為了此類手術的首選術式。
目前,臨床上通常基于全腔靜脈-肺動脈連接(total cavopulmonary connection,TCPC)生成 Fontan 循環,即建立一個四通路 TCPC,將血流從上下腔靜脈直接引入左右肺動脈[7]。Fontan 循環的最大特點在于:患兒的功能性單心室將與正常人的左心室一樣僅需要維持體循環的功能,而肺循環功能則需要依靠上下腔靜脈與左心房的壓力差將血流被動地導入肺動脈[8],最后流回至左心房。然而,Fontan 循環中過大的單心室前負荷、過高的靜脈壓以及肺循環血流量不足等原因,將會導致各種后續并發癥的發生[8],包括心律失常、心衰、血栓、神經系統功能障礙,甚至影響單心室患兒肺部以及全身的血管發育[9-10],這些均是導致 Fontan 循環衰竭的主要原因。這時僅可能通過人工心臟這種機械循環輔助設備,通常是旋轉式血液泵(rotary blood pump,RBP)來幫助患者維持生命。
RBP 被認為是恢復肺下動力并且預防和治療 Fontan 循環衰竭的潛在方案[11]。臨床上已有將 RBP 作為心臟移植前的過渡的報道,但現有技術的效果并不理想[12-14]。目前已設計出專門用于支持 Fontan 患者的腔-肺輔助裝置(cavopulmonary assist device,CPAD)。與傳統意義上的 RBP 相比,CPAD 具有獨特的血流動力學特性:裝置植入四通路 TCPC 的中心處,能夠提供足夠的生理灌注,同時適度地增加腔肺壓力差(cavopulmonary pressure head,CPPH),即腔靜脈壓和肺動脈壓之間的差值[15-16]。另外,CPAD 還需要根據患者的不同生理條件自適應地提供生理灌注,同時盡量減少腔靜脈抽吸現象。傳統的 RBP 通常用于治療左心室衰竭,但 RBP 植入后,容易造成心室和血管塌陷,即抽吸現象[17]。由于腔靜脈血管壁菲薄,容量極其有限,植入 CPAD 后腔靜脈處更容易產生抽吸現象。因此,針對 Fontan 循環衰竭建立 CPAD 的控制系統,既保證患者足夠的生理灌注,又有效預防抽吸現象便至關重要。目前,已有 CPAD 恒定血泵轉速開環控制算法來改善 Fontan 循環衰竭,并為患者提供足夠的生理灌注[18-21]。但這些方法無法保證在波動的生理狀態下為患者提供持續的灌注,而且 CPAD 恒定血泵轉速開環控制算法在某些條件下仍然會產生抽吸現象。此外,有少量的研究使用閉環控制算法來解決 Fontan 循環衰竭的問題,比如通過保持 CPAD 進出口兩端壓力差來保證足夠的心輸出量及預防抽吸現象[22-24]。然而這些方法需要植入額外的壓力或流量傳感器來實現,但是,目前臨床上可植入式壓力和流量傳感器由于傳感器位置漂移或故障、測量值無法重新校正、血泵內血栓導致傳感器導管堵塞、使用時間過長導致的測量誤差等原因,無法長期使用[25-26]。
因此,本文擬通過搭建基于單心室患兒的 Fontan 循環衰竭和 CPAD 計算機仿真耦合模型,評估 CPAD 對于 Fontan 循環衰竭的效果,并通過體外實驗平臺對模型進行驗證。基于此模型提出了一種新穎的無傳感器反饋控制算法,該方法基于 CPAD 血泵轉速這一固有參數準確估算 CPPH 值,避免了臨床上無法長期使用壓力傳感器的缺點,并針對 CPPH 值設定 CPPH 參考值(CPPH reference,CPPHr),采用增益調度比例-積分(proportional-integral,PI)控制器,使實際 CPPH 值逐漸逼近參考值,從而保證循環系統中足夠的心輸出量,同時預防抽吸現象的發生。本文將設計的無傳感器反饋控制算法與基于傳感器的反饋控制算法以及 CPAD 恒定血泵轉速開環控制算法在各種生理條件下進行比較,以期最終實現改善心輸出量不足的問題,并達到預防 CPAD 恒定血泵轉速導致的腔靜脈抽吸現象的目的,同時為 CPAD 的優化選擇提供科學依據,從而提高 CPAD 對 Fontan 循環衰竭的治療和康復能力。
1 方法
1.1 基于單心室患兒的 Fontan 循環衰竭與 CPAD 計算機仿真耦合模型
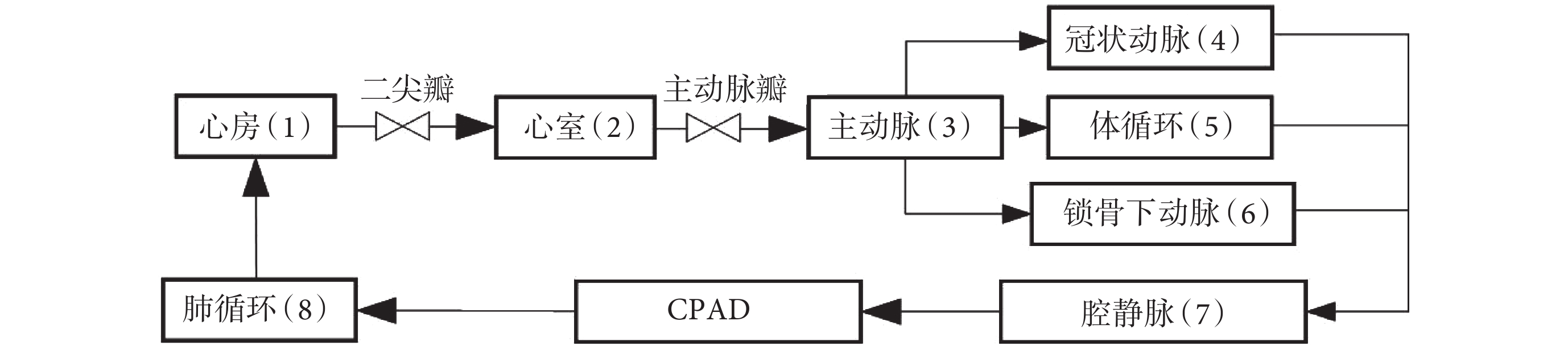
本研究中的 4 歲單心室患兒 Fontan 循環模型,如圖 1 所示。此模型基于先前發表的人體循環系統計算機仿真模型改進。這種模型已經被成功驗證,并且能夠用于不同的 RBP 設計各種抽吸預防、生理控制以及故障檢測算法等[18, 27]。本文的單心室患兒 Fontan 循環模型根據文獻中報告的數值和臨床指導進行開發[28-30],方法上與成人 Fontan 模型相似。本文的仿真模型將 Fontan 循環系統分為單心室、心房、主動脈、冠狀動脈、鎖骨下動脈、體循環、腔靜脈、肺循環和瓣膜等模塊。這些集中參數模塊的特征由其自身的阻抗、順應性、壓力和血液容積決定,并且心房和單心室的順應性(C1 和 C2)是時變的。每個模塊的血液容積可由微分方程描述為容積(V)、順應性(C)和阻抗(R)的函數,如式(1)所示:
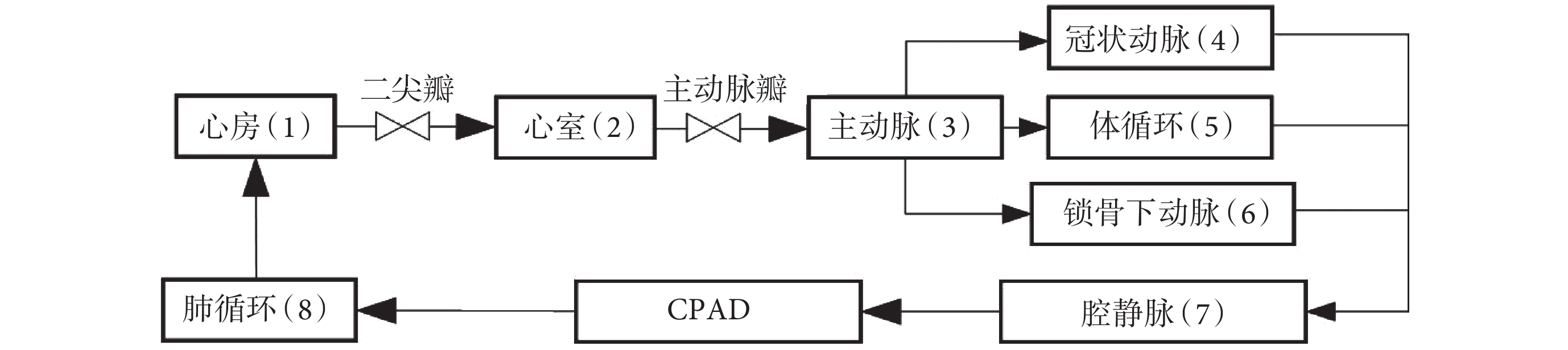 圖1
基于單心室患兒 Fontan 循環和 CPAD 的耦合模型
Figure1.
The coupled model of Fontan circulation for the children patients with a single ventricle and CPAD
圖1
基于單心室患兒 Fontan 循環和 CPAD 的耦合模型
Figure1.
The coupled model of Fontan circulation for the children patients with a single ventricle and CPAD
 |
式(1)中,dVn/dt 是第 n 個模塊容積的變化率,Fnin 是流入第 n 個模塊的血流量,Fnout 是流出第 n 個模塊的血流量。通過調節單心室的相關集中參數便可準確模擬 Fontan 循環衰竭狀態。具體模型參數分別為:R1 = 0.013 mm Hg·s/mL、R2 = 0.029 mm Hg·s/mL(二尖瓣打開)、R3 = 0.013 mm Hg·s/mL(主動脈瓣打開)、C3 = 0.266 mL/mm Hg、R4 = 0.01 mm Hg·s/mL、C4 = 0.211 mL/mm Hg、R5 = 0.5 mm Hg·s/mL、C5 = 57.84 mL/mm Hg、R6 = 0.04 mm Hg·s/mL、C6 = 0.029 mL/mm Hg、R7 = 0.071 mm Hg·s/mL、C7 = 22.13 mL/mm Hg、R8 = 0.22 mm Hg·s/mL、C8 = 26.82 mL/mm Hg。上述計算機仿真模型將與 CPAD 模型耦合。
本文中的 CPAD 即 Fontan 血泵模型基于 Choi 等[31]和 Pillay 等[32]提出的直流無刷電機 RBP 模型推導。CPAD 模型由如式(2)所示的微分方程描述:
 |
式(2)中,J 是轉子慣性,ω 是 CPAD 的血泵轉速,單位是 rad/s,KB 是反電動勢常數,I 是作為控制變量的相電流,B 是阻尼系數,a0 和 a1 是相關常數,Fp 是 CPAD 血泵流量,單位是 mL/s,并可由如式(3)所示的微分方程描述:
 |
式(3)中,CPPH 值以符號 CPPH 表示,b0、b1、b2 為實驗常數,式(2)和(3)中的參數通過實驗確定,分別為:J = 9.16 × 10?7 kg·m2、KB = 0.003 kg·m2/(A·s2)、B = 6.6 × 10-7 kg·m2/s、a0 = 7.38 × 10-13 kg·m2·s/mL3、a1 = 1.98 × 10?11 kg·m2·s/mL、b0 = ? 0.336 mm Hg·s/mL、b1 = ? 0.027 mm Hg·s2/mL、b2 = 9.33 × 10?5 mm Hg·s2。CPAD 模型的表達式只影響腔靜脈和肺循環的微分方程。
1.2 基于單心室患兒的 Fontan 循環衰竭與 CPAD 體外實驗模型
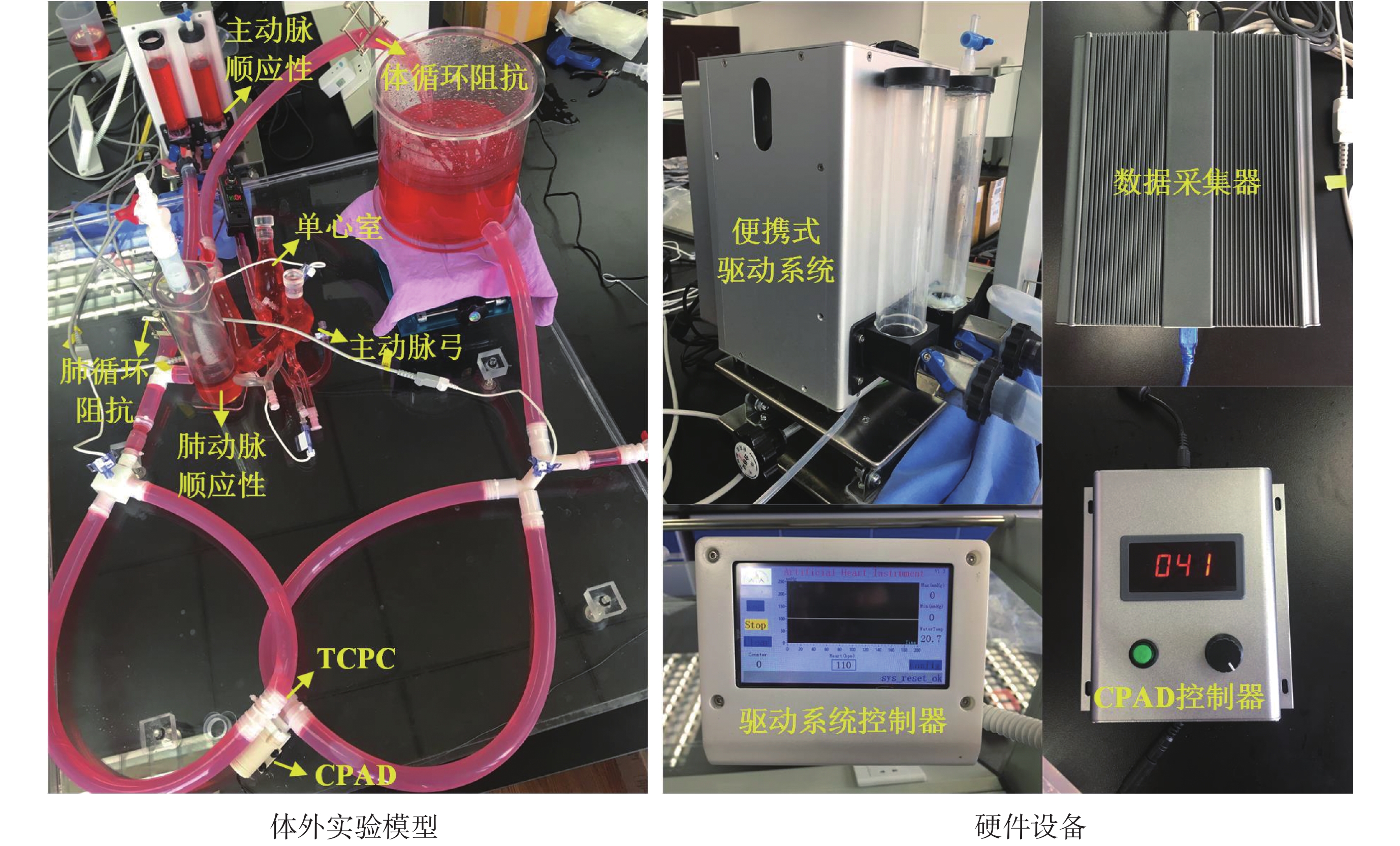
本文搭建的 Fontan 循環衰竭與 CPAD 體外實驗耦合模型如圖 2 所示,該模型中的 Fontan 循環系統分別由單心室、主動脈弓、主動脈順應性、體循環阻抗、TCPC、CPAD、肺動脈順應性、肺循環阻抗構成,其中心室和主動脈弓均由特殊的人工硅膠制成。本文所采用的 CPAD 是無刷直流葉輪離心式血液泵(SSC-500,蘇州瑛譜儀器設備有限公司,中國)。該血液泵使用 4.5~24 V 的直流電壓驅動無刷電機運轉,通過無刷電機的轉動來帶動葉輪的轉動,以達到傳輸液體的目的。CPAD 的液體流入口與上、下腔靜脈相連,液體流出口與左、右肺動脈相連,形成類似四通路的 TCPC。實驗用液體為水與甘油的混合液體(m∶m=3∶2),用于模擬人體正常血液粘度。另外,實驗采用流量計(FD-Q,Keyence Inc.,日本)測量心輸出量,采用壓力傳感器(DPT-100,Utah Medical Products Inc.,美國)測量主動脈壓力、肺動脈壓力以及腔靜脈壓力。
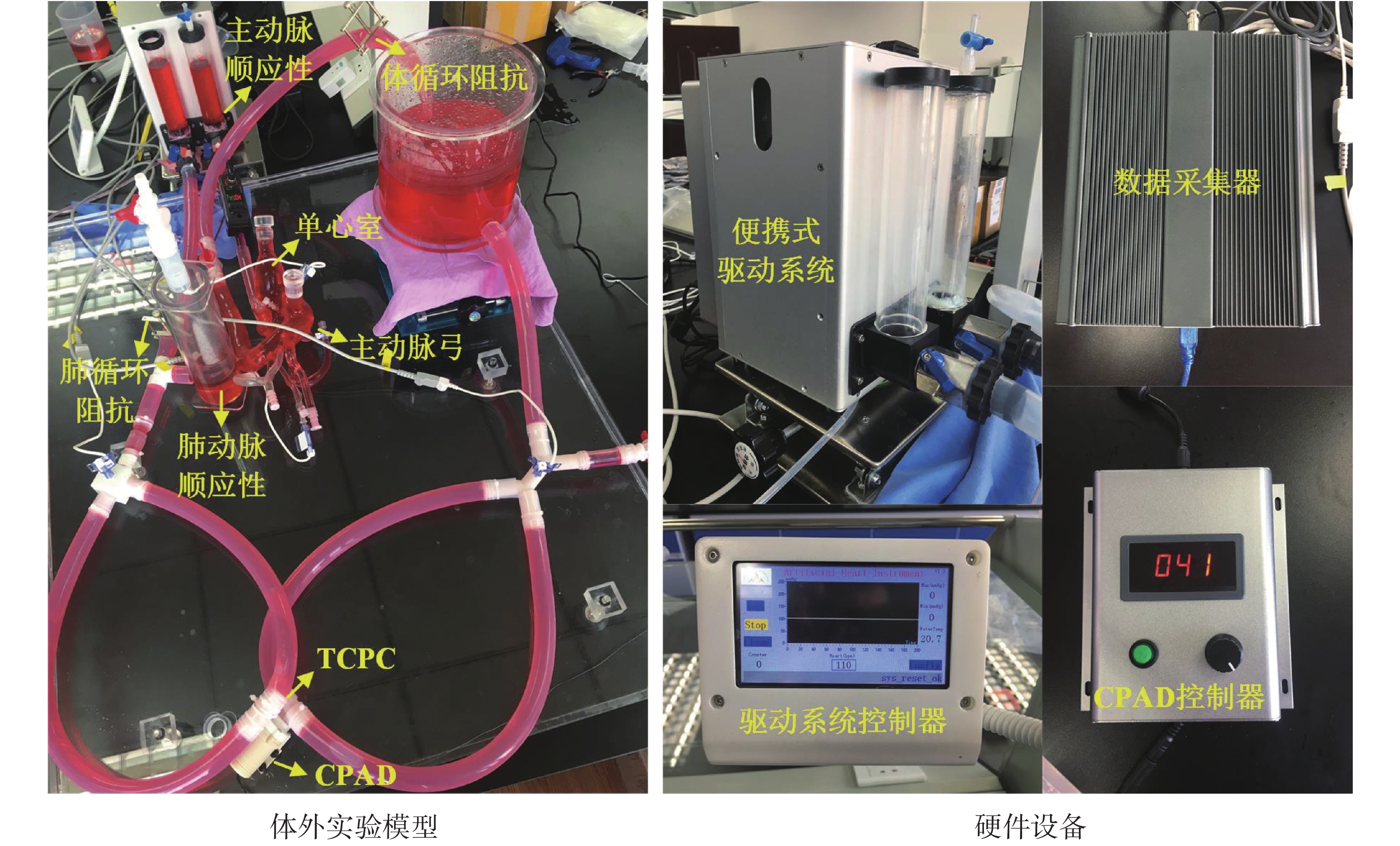 圖2
體外實驗模型以及相關硬件設備
Figure2.
The in-vitro experiment model and corresponding hardware devices
圖2
體外實驗模型以及相關硬件設備
Figure2.
The in-vitro experiment model and corresponding hardware devices
圖 2 還包括體外實驗模型所采用的硬件,分別是便攜式驅動系統及其配套控制器和數據采集器(SHS-100,蘇州瑛譜儀器設備有限公司,中國)以及 CPAD 控制器(DCP-500,蘇州瑛譜儀器設備有限公司,中國)。便攜式驅動系統是一種用于模擬心臟脈動的血液泵,性能包括可以實現液體的脈動循環、液體控溫加熱、壓力監控等,并且可為心臟及其周邊器官的植入物以及血管的模擬提供測試的動力源。動力源來自于便攜式驅動系統內置的定制化音圈電機,可通過驅動系統的控制器實現對電機運動的控制,通過調節心室內部液體循環往復量來模擬心室的生理和病理狀態。驅動系統內也內置了 2 個球瓣,分別用于模擬二尖瓣和主動脈瓣,通過兩個瓣膜的打開和閉合來模擬心室的收縮和舒張功能。CPAD 控制器屏幕上的數字顯示的是 CPAD 血泵最大轉速(9 600 r/min)的百分比,通過調節控制器上右側的旋鈕便可控制當前 CPAD 血泵轉速值。實驗中通過調節音圈電機、心率、主動脈順應性、體循環阻抗、肺動脈順應性以及肺循環阻抗來模擬 4 歲單心室患兒 Fontan 生理和病理特性的各種血流動力學參數。
1.3 控制方法的設計與數據分析
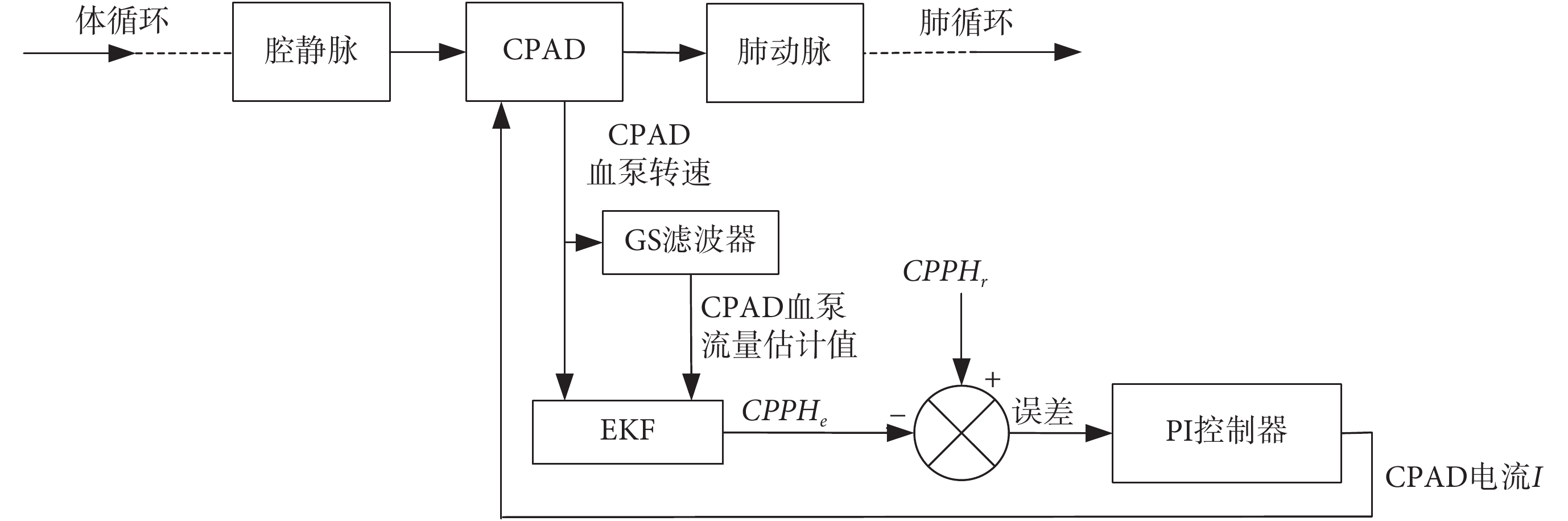
研究發現,肺動脈壓與 CPPH 值和心輸出量之間存在著一定的關系。因此,本文提出的具體控制算法是采用增益調度 PI 控制器調整控制系統的輸入 I,使得控制系統的輸出(即實際 CPPH 值)逼近控制目標 CPPHr,為人體循環系統提供足夠的生理灌注,同時避免由于 CPAD 恒定血泵轉速導致的抽吸現象的發生。采用增益調度 PI 控制器的主要原因在于這種控制器的設置只需要選擇合適的控制器系數和合適的 CPPHr。本研究中實際 CPPH 值使用擴展卡爾曼濾波器(extended Kalman filter,EKF)來準確估算[33],EKF 具體使用了 CPAD 的固有參數(帶噪音的 CPAD 血泵轉速)以及格雷-賽維斯基(Golay-Savitsky,GS)濾波器[34]。使用 EKF 是因為它與對角協方差矩陣相結合來假設模型誤差和處理噪聲,并且這種預測校正算法可以對噪聲數據進行遞歸操作,進而對系統狀態或參數產生統計上最優的實時估計[22]。因此 EKF 的使用不僅限于高斯噪聲,也適用于無法直接測量的系統狀態和參數。另外,本研究中的 GS 濾波器是一個由 17 個點組成的移動窗口,用于擬合二階多項式。該濾波器可以保持信號的峰值和谷值以濾除低頻和高頻噪聲。本研究對實際 CPAD 血泵轉速加入 2% 均勻分布的噪聲[22],進而對實際 CPPH 值進行估算。控制輸入,即 CPAD 電流利用如式(4)所示的控制律進行更新和修正:
 |
式(4)中,CPPHr 是 CPPH 的參考值,以符號 CPPHr 表示;CPPH 的實際估計值(CPPH evaluate,CPPHe),以符號 CPPHe 表示;t 是時間,k1 和 k2 是自定義的控制器系數。如圖 3 所示為設計的無傳感器反饋控制算法流程圖。
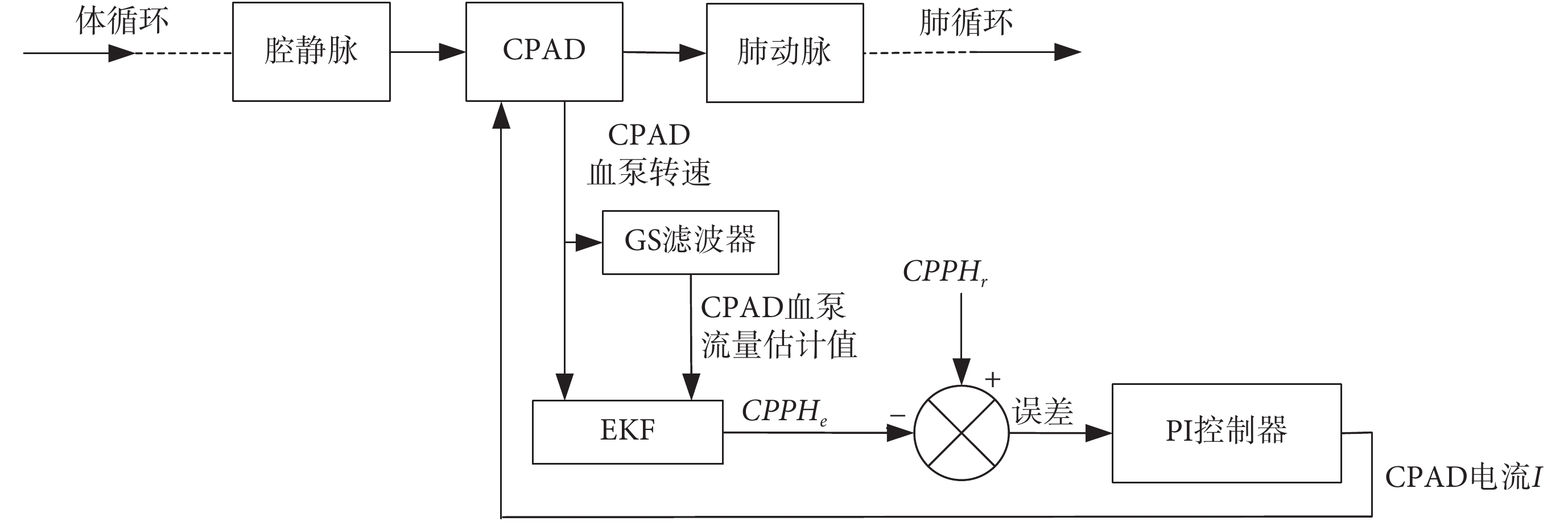 圖3
設計的無傳感器反饋控制算法流程圖
Figure3.
Flowchart of the proposed sensorless feedback control algorithm
圖3
設計的無傳感器反饋控制算法流程圖
Figure3.
Flowchart of the proposed sensorless feedback control algorithm
由于研究的對象為 4 歲單心室患兒 Fontan 循環模型,因此模擬的心率為 120 次/min,并且設定的參考值為 CPPHr = 8 mm Hg。在所有測試條件下,控制器系數 k1 和 k2 的值均保持不變,其中 k1 = 0.004、k2 = 0.000 8。本文將模擬在 Fontan 術后患兒循環衰竭的條件下,對設計的無傳感器反饋控制算法的效果和魯棒性進行評估,包括正常的腔靜脈阻抗以及腔靜脈阻抗快速增加 3 倍后極易發生腔靜脈抽吸現象的極端條件[22],并將本文中所提出的無傳感器反饋控制算法性能與基于傳感器的反饋控制算法以及 CPAD 恒定血泵轉速開環控制算法性能進行比較。其中,基于傳感器的反饋控制算法的實際 CPPH 值可通過兩個壓力傳感器分別測量腔靜脈與肺動脈的壓力得到;而 CPAD 恒定血泵轉速開環控制算法的輸入電流表達式與式(4)類似,區別在于參考值為 CPAD 血泵轉速,實際 CPAD 血泵轉速值逼近 CPAD 血泵轉速參考值,并且兩個控制器系數 k1 和 k2 分別為 0.01 和 5。
本文將在所有仿真和體外實驗條件下計算各種血流動力學參數并分析其相關特征,用轉速、壓力和血流量計算分析以下波形穩定后的具體血流動力學參數,包括:CPAD 血泵轉速、心輸出量、主動脈平均壓、收縮壓/舒張壓、腔靜脈壓、肺動脈壓、CPPH。定義腔靜脈的瞬時壓力不大于 1 mm Hg 時為抽吸現象[6]。
2 結果
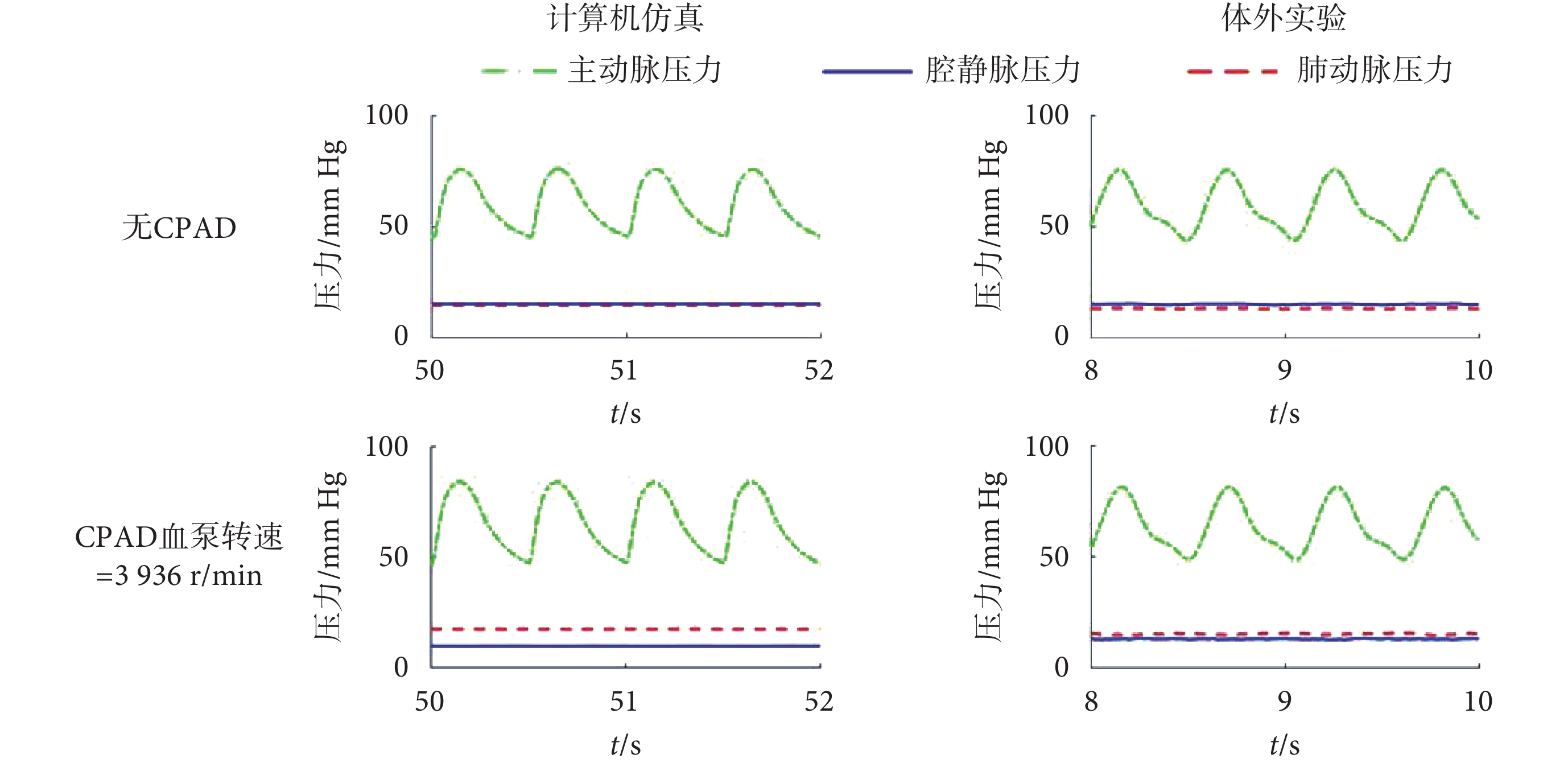
Fontan 循環衰竭表現為心輸出量、主動脈收縮壓和舒張壓均要低于同等條件下正常兒童的血流動力學參數(正常 4 歲兒童的心輸出量不小于 3.0 L/min),同時也低于正常 Fontan 循環條件下患兒的血流動力學參數(正常 Fontan 循環條件下患兒的心輸出量接近于 3.0 L/min)[15]。Fontan 循環衰竭系統在有、無 CPAD 支持下基于計算機仿真和體外實驗的重要血流動力學結果如表 1 和圖 4 所示。圖 4 僅展示了當 CPAD 血泵轉速為 3 936 r/min 的曲線,因為此時實際 CPPH 值與參考值基本相等。本文之所以選擇表 1 中的三種 CPAD 血泵轉速,是為了說明當 CPAD 血泵轉速逐漸增大時,三種 CPAD 血泵轉速下產生的實際 CPPH 值也在逐漸增大,并且在 3 936 r/min 時的實際 CPPH 值最終超過了設定的 CPPH 參考值 8.0 mm Hg,為后面的無傳感器反饋控制算法結果做鋪墊。三種 CPAD 血泵轉速的選擇也考慮到了對于實際心輸出量的要求(2.9~3.0 L/min),若選擇的 CPAD 血泵轉速過小則不滿足患兒的實際心輸出量要求。另外,由于驅動系統為便攜式,過大的 CPAD 血泵轉速會導致整個系統中的液體溢出,使得體外實驗結果不嚴謹。從表 1 和圖 4 中可以看出,無論采用何種建模方式,心輸出量、主動脈收縮壓/舒張壓和平均壓以及肺動脈壓均隨著 CPAD 血泵轉速的增大而增大,而腔靜脈壓力隨著 CPAD 血泵轉速的增大而減小,實際 CPPH 值也隨著 CPAD 血泵轉速的增大而增大。計算機仿真和體外實驗結果的變化趨勢保持一致,并且在 Fontan 循環衰竭以及同等 CPAD 血泵轉速條件下,計算機仿真和體外實驗結果中的心輸出量和主動脈壓力(平均壓、收縮壓、舒張壓)非常接近。
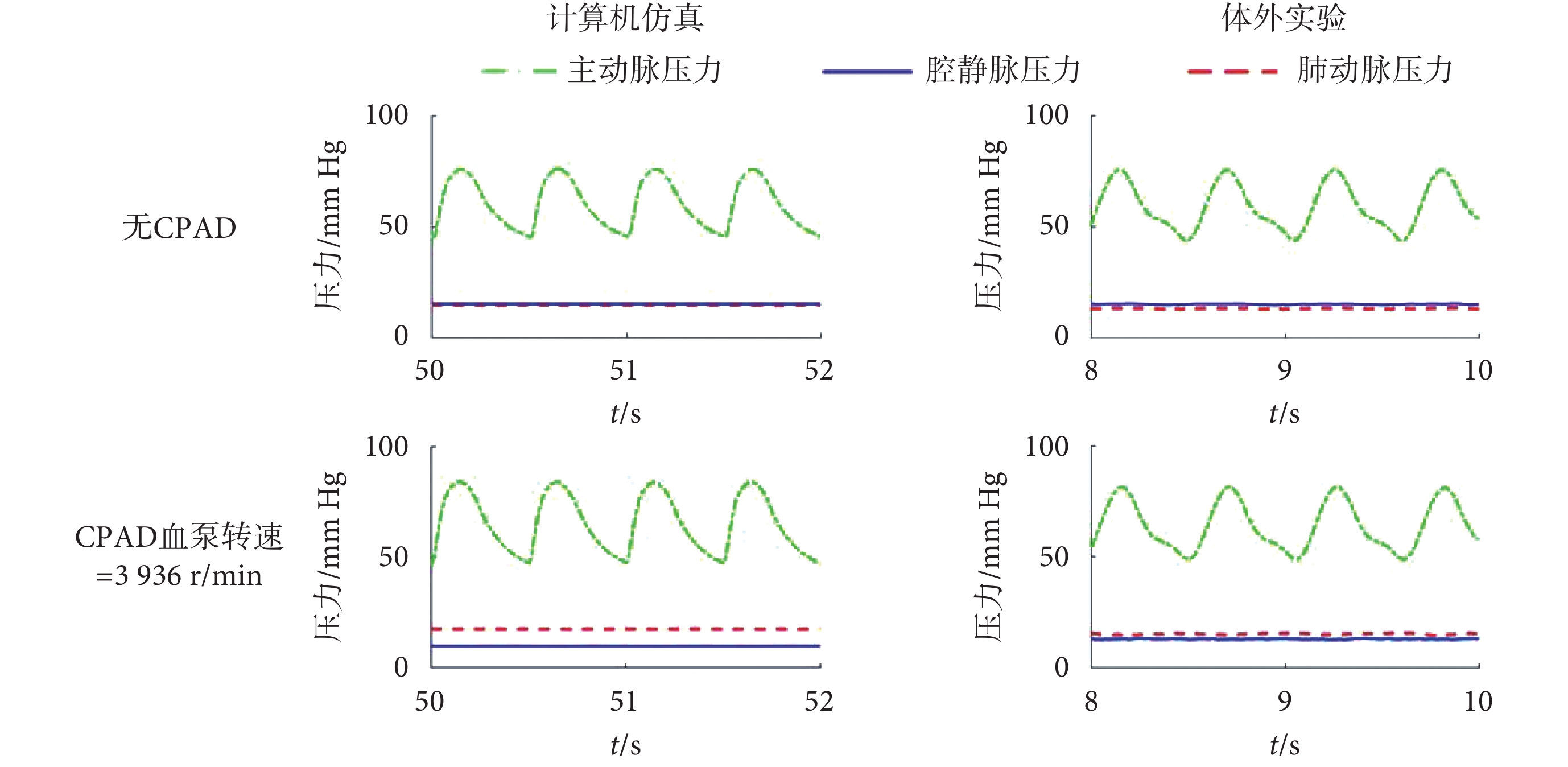 圖4
Fontan 循環衰竭系統的血流動力學結果
Figure4.
Hemodynamic results of the Fontan circulation failure system
圖4
Fontan 循環衰竭系統的血流動力學結果
Figure4.
Hemodynamic results of the Fontan circulation failure system
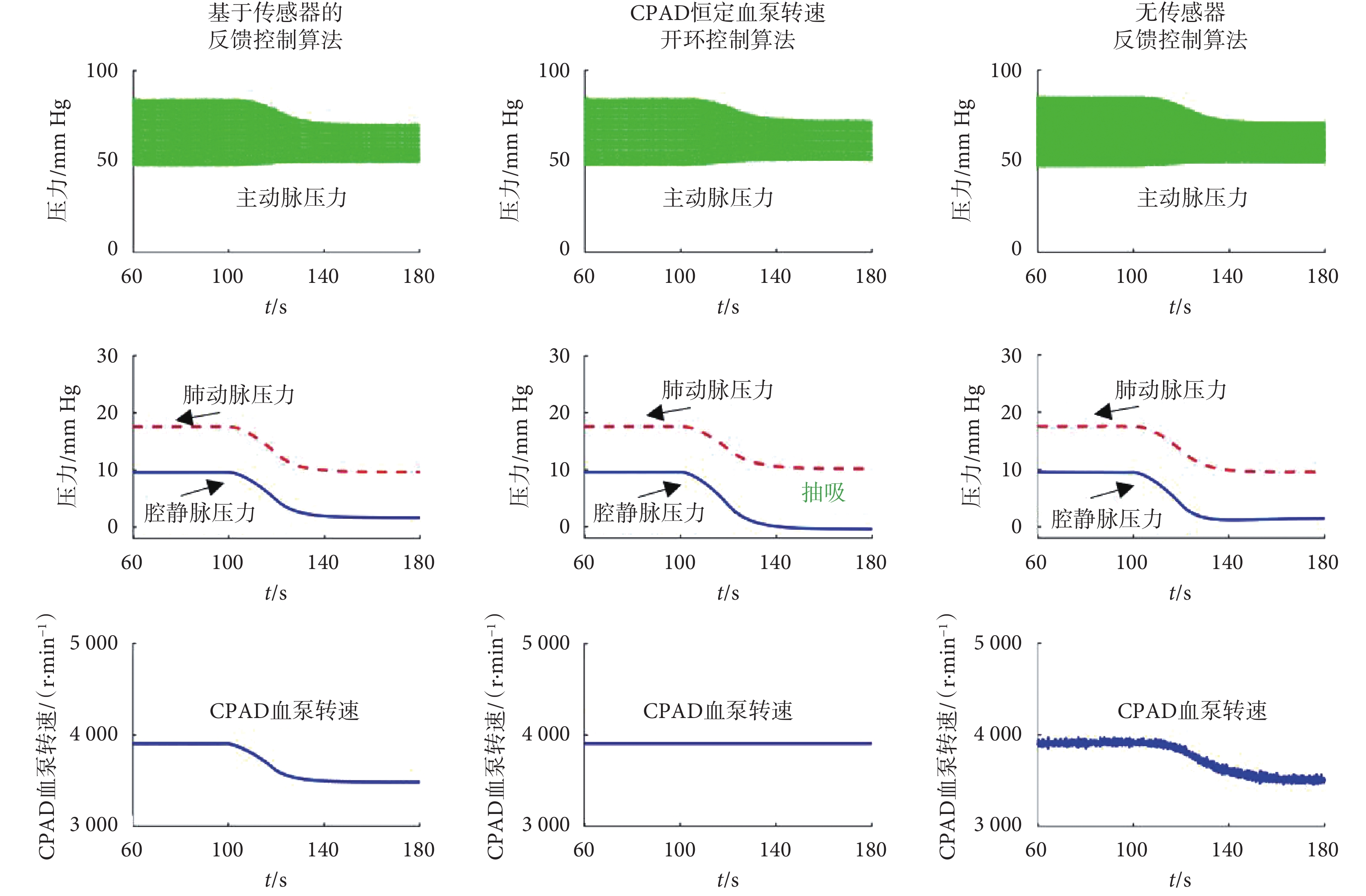
本研究中基于傳感器的反饋控制算法需要測量腔靜脈壓力和肺動脈壓力,將兩者的差值即實際 CPPH 值保持在 8 mm Hg。基于傳感器的反饋控制算法可以將心輸出量從基于 Fontan 循環衰竭狀態的 2.4 L/min 提升至 3.0 L/min,略大于正常 Fontan 循環條件下患兒的心輸出量,同時非常接近于正常 4 歲兒童的心輸出量,此時的主動脈壓力也明顯大于 Fontan 循環衰竭狀態的主動脈壓力,同時實際 CPPH 值準確地保持在 8 mm Hg,如表 2 所示。另外,基于傳感器的反饋控制算法沒有引起腔靜脈的抽吸現象,甚至是在腔靜脈阻抗快速(100~120 s 時,即 20 s 內)升高至 3 倍的情況下。相比較而言,CPAD 恒定血泵轉速開環控制算法的仿真結果如表 2 和圖 5 所示。根據基于傳感器的反饋控制算法的結果,CPAD 恒定血泵轉速開環控制算法選定的 CPAD 血泵轉速參考值是 3 903 r/min。結果表明,當腔靜脈阻抗不發生變化時,三種控制算法的所有血流動力學結果基本保持一致。然而,當腔靜脈阻抗快速增加 3 倍的時候,CPAD 恒定血泵轉速開環控制算法明顯導致了腔靜脈抽吸現象(CPAD 恒定血泵轉速開環控制算法中的腔靜脈壓力小于 1 mm Hg),同時實際 CPPH 值(10.7 mm Hg)也明顯大于設定的參考值。
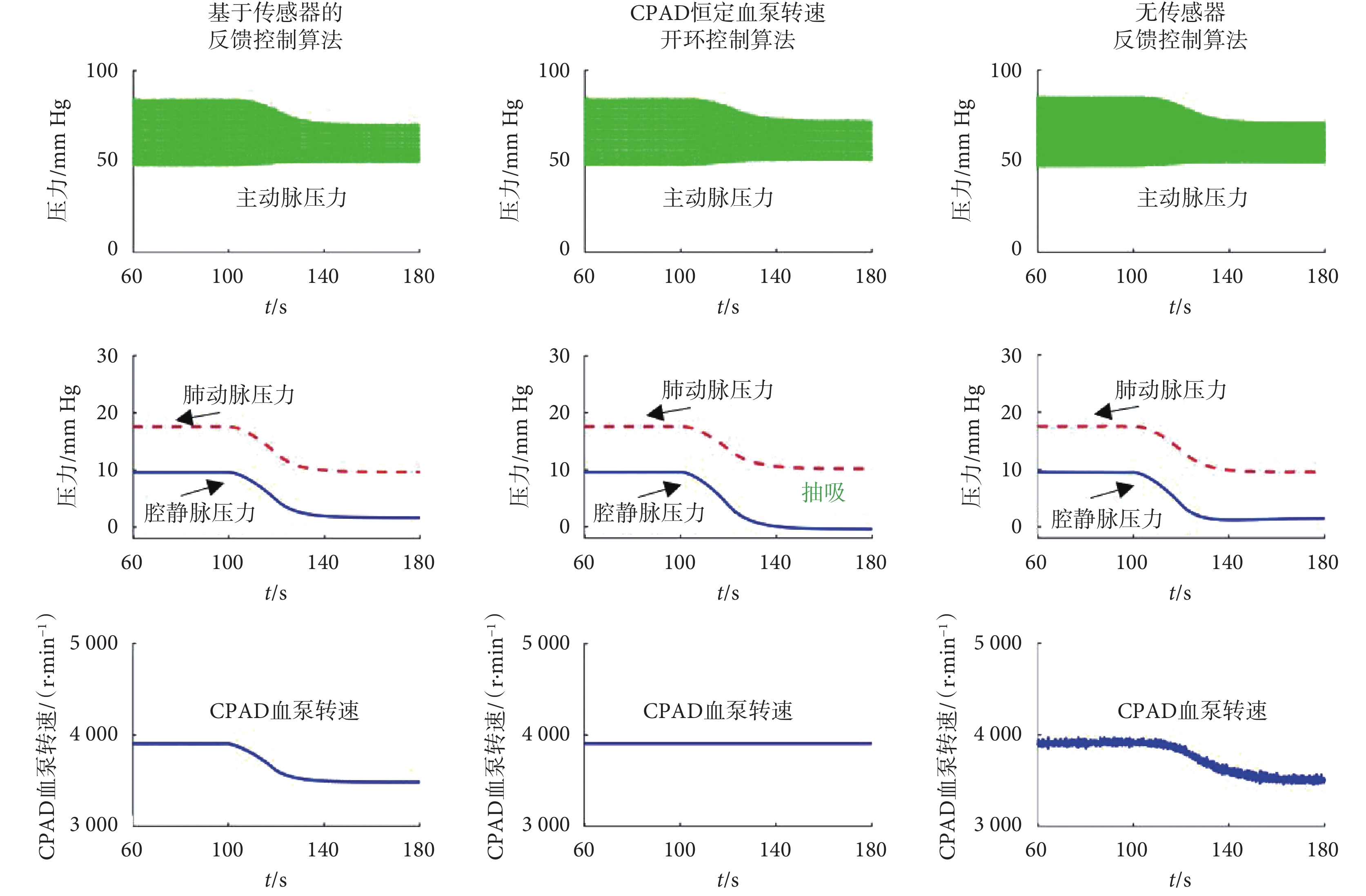 圖5
三種控制算法在腔靜脈阻抗增加 3 倍條件下的結果對比
Figure5.
Comparison of results based on the three control algorithms during a 3-fold increase in vena cava resistance
圖5
三種控制算法在腔靜脈阻抗增加 3 倍條件下的結果對比
Figure5.
Comparison of results based on the three control algorithms during a 3-fold increase in vena cava resistance
相比較而言,無傳感器反饋控制算法僅需要 CPAD 血泵轉速來估算和保持 CPPH。與基于傳感器的反饋控制算法類似,設計的無傳感器反饋控制算法也能夠將心輸出量由 Fontan 循環衰竭狀態的 2.4 L/min 提升至 3.1 L/min,略大于正常 Fontan 循環條件下患兒的心輸出量,并于正常 4 歲兒童的心輸出量相當,主動脈壓力大于 Fontan 循環衰竭狀態的主動脈壓力,同時實際 CPPH 值準確地保持在 8 mm Hg,如表 2 所示。無傳感器反饋控制算法同樣也沒有在腔靜脈阻抗快速升高至 3 倍的情況下引起腔靜脈的抽吸現象。如表 2 和圖 5 所示,無傳感器反饋控制算法與基于傳感器的反饋控制算法的效果幾乎相同,但主要不同點在于由于 CPAD 血泵轉速噪音的存在,相關結果的實際波形會有少許波動,但最終也會趨于平穩。
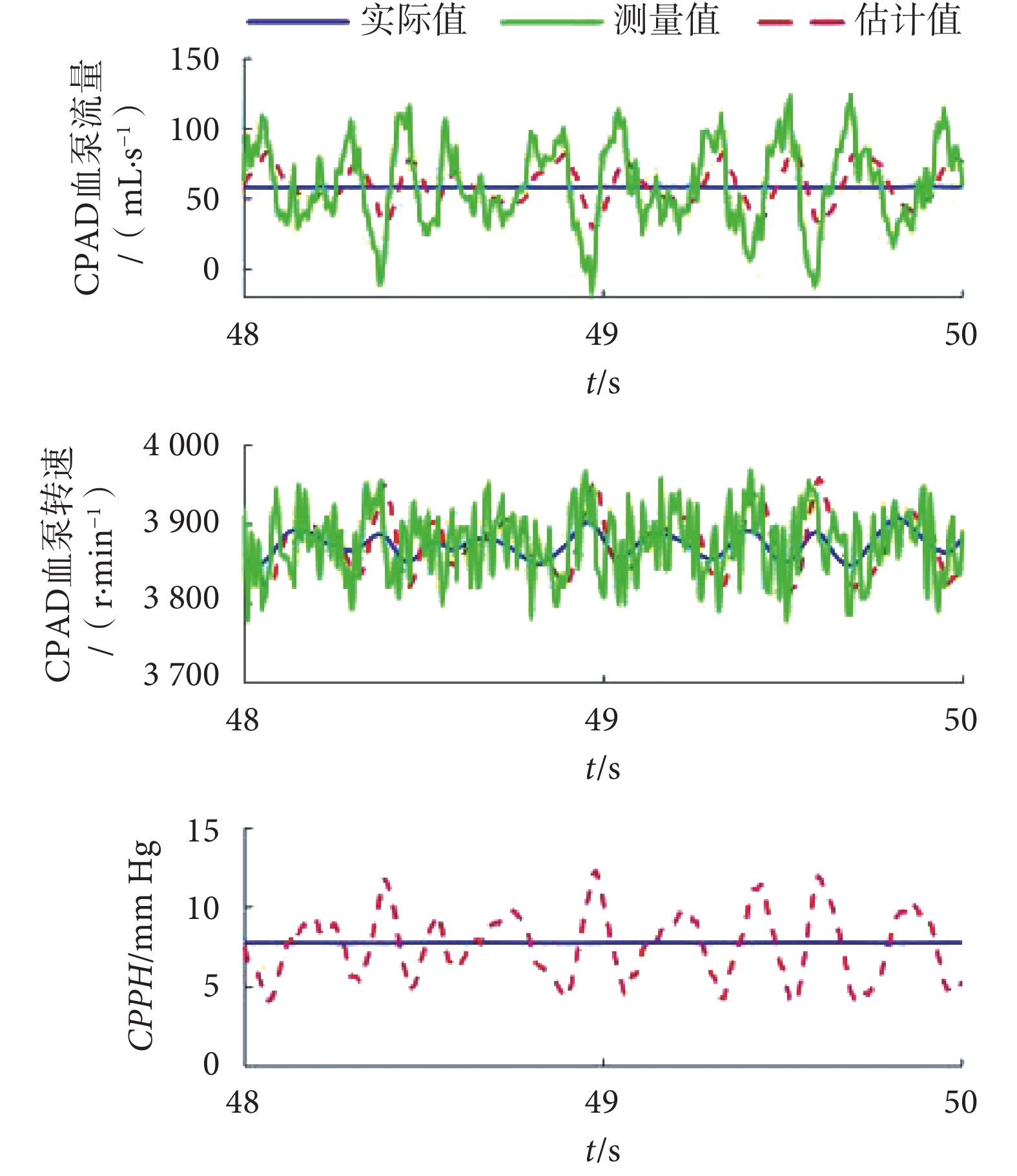
另外,CPAD 血泵流量的實際值(無噪聲)/測量值(加噪聲的實際值)/估計值(有噪聲并通過 EKF 準確估算)、CPAD 血泵轉速的實際值/測量值/估計值以及 CPPH 的實際值和估計值之間的比較如圖 6 所示。測量的 CPAD 血泵流量和血泵轉速、估計的 CPAD 血泵流量和血泵轉速以及估計的實際 CPPH 值的均方根誤差(root mean squared error,RMSE)如表 3 所示。
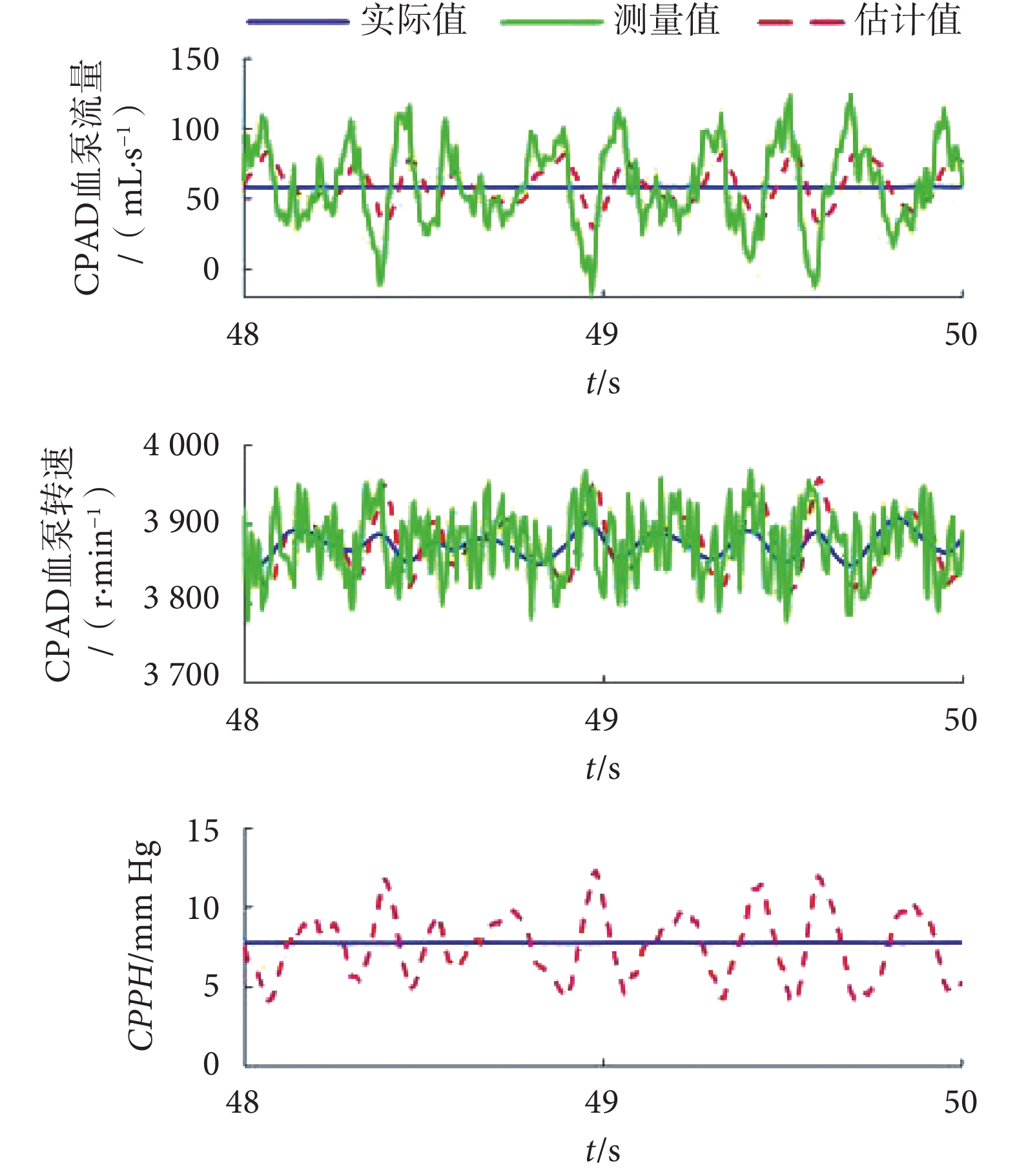 圖6
CPAD 血泵流量、血泵轉速、CPPH 的結果比較
Figure6.
Comparison of results for CPAD pump flow, pump speed, and CPPH
圖6
CPAD 血泵流量、血泵轉速、CPPH 的結果比較
Figure6.
Comparison of results for CPAD pump flow, pump speed, and CPPH
3 討論與分析
過去 30 多年中,許多功能性單心室患兒接受 Fontan 治療后,最終發展為 Fontan 循環衰竭。目前,Fontan 循環衰竭患者的治療辦法包括藥物治療、Fontan 血流的手術優化以及機械循環輔助治療。其中,藥物治療局限性較大、副作用多。比如,利尿劑能夠減少組織中水含量,但要以犧牲循環血液容量為代價,而血液容量對維持心輸出量和循環的動態平衡至關重要。強心治療可以增加心室的收縮性,但對于前負荷不足的心室而言,這種治療效果不佳。前瞻性隨機試驗中,強心藥物磷酸二酯酶抑制劑顯現出一定的遠期效果,但其對心功能的改善程度尚不明確[35]。為了克服藥物治療的局限性,一些研究提出通過手術優化 TCPC 的方法[36]。但是,基于 TCPC 的外科手術仍然沒有大規模地應用于臨床。因此,對于 Fontan 循環衰竭的患者而言,迫切需要一種更為有效、實用的治療方法。
本文針對 CPAD 設計的無傳感器反饋控制算法能夠滿足 Fontan 循環系統的生理灌注需求。CPAD 對于控制系統的要求與 RBP 有著明顯的不同,CPAD 需要通過提高實際 CPPH 值進而提升心輸出量以及主動脈壓力。本文的研究結果表明,將實際 CPPH 值保持在約 8 mm Hg 即可恢復正常的 Fontan 循環系統。事實上,大多數 Fontan 患者單心室的收縮功能保持不變[37],但由于缺乏肺下動力源,即右心室,導致了心輸出量和主動脈壓力的降低。因此,本研究使用 CPAD 恢復肺下動力源并使 CPPH 增加至 8 mm Hg,可使 Fontan 循環與正常的雙心室生理學近似[12]。本文之所以將 CPPH 參考值設定在 8 mm Hg,原因在于之前基于新生以及幼年羔羊的動物實驗顯示,為了提高心輸出量,可將 CPPH 參考值設定在略高于 8 mm Hg[38]。因此,對于 Fontan 患兒而言,可將 CPPH 參考值設定為大約 8 mm Hg。需要指出的是,依賴于固有心室搏動指數等參數的抽吸預防策略不能適用于基于 CPAD 的控制系統,這是因為缺乏自然的右心室,腔靜脈和肺動脈的脈動性幾乎為零,計算機仿真和體外實驗均驗證了這一點。
本文提出的無傳感器反饋控制算法采用基于模型的方法來估計 CPPH,無需使用額外的壓力傳感器。雖然目前正在開發具有低位置偏移率的壓力傳感器[26],然而可供長期使用的這類可植入式傳感器的研發仍然是較大的挑戰,尤其是人工心臟設備血栓的形成以及傳感器故障等原因,無形中降低了傳感器的可靠性和安全性[25],并且內置額外壓力傳感器也會增加 CPAD 解決 Fontan 循環衰竭問題的復雜度和成本。而本研究所設計的無傳感器反饋控制算法的性能可與基于傳感器的反饋控制算法相媲美,并且就抽吸預防而言,其性能優于 CPAD 恒定血泵轉速開環控制算法。無傳感器反饋控制算法和基于傳感器的反饋控制算法均能夠在非生理性測試條件下(即腔靜脈阻抗快速增加 3 倍)有效避免腔靜脈抽吸現象。實際上,成倍增加動脈/靜脈阻抗是一種不常見的極端生理現象,本研究的目的是為了證明在這種極端條件下,設計的無傳感器反饋控制算法的性能依然會優于 CPAD 恒定血泵轉速開環控制算法。已經有文獻基于成人人工心臟的模型,在 3 倍增加肺靜脈和腔靜脈阻抗的極端條件下設計相關控制算法,并得到了理想的結果[22]。另外,雖然 CPAD 血泵流量、血泵轉速以及 CPPH 的估計值波形與實際值存在差異,但從結果來看,這些差異并沒有影響或降低無傳感器反饋控制算法的性能。上述參數的估計值與實際值之間的 RMSE 也較小,并且通過調節濾波器的特征,可以進一步減小由 EKF 和 GS 濾波器引起的 RMSE。
在實際設計當中,需要設計 CPAD 的葉輪和外殼之間有較大縫隙,這一點對于 CPAD 的幾何結構至關重要,其主要目的在于確保血泵發生故障時患者的安全。由于這些縫隙,當血泵工作后在進出口兩端產生 CPPH 時,反流(由于肺動脈壓力大于腔靜脈壓力而產生)與 CPAD 產生的正向血流會同時發生,從而導致心輸出量略小于 CPAD 血泵流量。
到目前為止,基于單心室 Fontan 循環的精準動物模型并不存在,利用計算機仿真和體外實驗平臺可以驗證和檢測 CPAD 對于 Fontan 循環衰竭的效果。但是,計算機仿真和體外實驗均不可避免地存在著一定的局限性,它們無法重現所有預期的臨床效果,也無法體現真正動物實驗的重要性和意義,并且這些模型不能模擬神經體液反應、組織重構以及基因和蛋白的表達。本文所選用的計算機仿真模型假設了 Fontan 循環系統模型中的參數為集中參數,并且血液為牛頓流體[27, 31]。另外,基于 CPAD 的體外實驗中腔靜脈壓力和肺動脈壓力與計算機仿真結果有比較明顯的差別,這主要是由于體外實驗中用于模擬肺循環的部分使用了具有一定長度和順應性的特制硅膠導管以及用于測量各種壓力的傳感器本身固有的測量誤差導致的,但是這些因素并不會影響本文所設計的無傳感器反饋控制算法的性能和效果。盡管還存在著一定的不足和局限性,但是本文的研究驗證了將 CPAD 應用于 Fontan 循環衰竭以及 CPAD 控制系統對于提高心輸出量和防止腔靜脈抽吸現象的可行性,可為 CPAD 的優化設計以及 Fontan 循環衰竭治療方案的制定提供參考依據。
4 結論
本文針對功能性單心室患兒的 Fontan 循環衰竭問題設計了 CPAD 這種特殊的機械輔助裝置,并通過計算機仿真和體外實驗搭建了 Fontan 循環衰竭和 CPAD 的耦合模型。通過仿真和實驗的相互驗證,測試了 CPAD 對于 Fontan 循環衰竭的效果。結果表明,CPAD 能夠有效提高 Fontan 循環衰竭患者的心輸出量,提高主動脈壓力,進而改善 Fontan 循環衰竭的狀況。本文針對此 CPAD 設計了無傳感器反饋控制算法。與 CPAD 恒定血泵轉速開環控制算法相比,該無傳感器反饋控制算法不僅能夠滿足 Fontan 循環衰竭患兒對于心輸出量的需求,同時可以避免腔靜脈抽吸現象的發生。本文所設計的耦合模型和無傳感器反饋控制算法的實際臨床效果仍然需要利用優化的體外實驗以及多次大型動物實驗來進一步驗證。
利益沖突聲明:本文全體作者均聲明不存在利益沖突。
引言
功能性單心室是一類復雜的先天性心臟病[1]。根據患兒單心室的分型和病理生理改變,臨床上主要有兩種治療方案:心臟移植[2]和肺動脈下心室曠置術(Fontan)[3-4]。雖然效果不及成人心衰患者[5],心臟移植仍是單心室患兒最佳的治療方案。然而,由于心臟供體數量有限[6],心臟移植無法成為常規治療方法,Fontan 這種姑息性療法成為了此類手術的首選術式。
目前,臨床上通常基于全腔靜脈-肺動脈連接(total cavopulmonary connection,TCPC)生成 Fontan 循環,即建立一個四通路 TCPC,將血流從上下腔靜脈直接引入左右肺動脈[7]。Fontan 循環的最大特點在于:患兒的功能性單心室將與正常人的左心室一樣僅需要維持體循環的功能,而肺循環功能則需要依靠上下腔靜脈與左心房的壓力差將血流被動地導入肺動脈[8],最后流回至左心房。然而,Fontan 循環中過大的單心室前負荷、過高的靜脈壓以及肺循環血流量不足等原因,將會導致各種后續并發癥的發生[8],包括心律失常、心衰、血栓、神經系統功能障礙,甚至影響單心室患兒肺部以及全身的血管發育[9-10],這些均是導致 Fontan 循環衰竭的主要原因。這時僅可能通過人工心臟這種機械循環輔助設備,通常是旋轉式血液泵(rotary blood pump,RBP)來幫助患者維持生命。
RBP 被認為是恢復肺下動力并且預防和治療 Fontan 循環衰竭的潛在方案[11]。臨床上已有將 RBP 作為心臟移植前的過渡的報道,但現有技術的效果并不理想[12-14]。目前已設計出專門用于支持 Fontan 患者的腔-肺輔助裝置(cavopulmonary assist device,CPAD)。與傳統意義上的 RBP 相比,CPAD 具有獨特的血流動力學特性:裝置植入四通路 TCPC 的中心處,能夠提供足夠的生理灌注,同時適度地增加腔肺壓力差(cavopulmonary pressure head,CPPH),即腔靜脈壓和肺動脈壓之間的差值[15-16]。另外,CPAD 還需要根據患者的不同生理條件自適應地提供生理灌注,同時盡量減少腔靜脈抽吸現象。傳統的 RBP 通常用于治療左心室衰竭,但 RBP 植入后,容易造成心室和血管塌陷,即抽吸現象[17]。由于腔靜脈血管壁菲薄,容量極其有限,植入 CPAD 后腔靜脈處更容易產生抽吸現象。因此,針對 Fontan 循環衰竭建立 CPAD 的控制系統,既保證患者足夠的生理灌注,又有效預防抽吸現象便至關重要。目前,已有 CPAD 恒定血泵轉速開環控制算法來改善 Fontan 循環衰竭,并為患者提供足夠的生理灌注[18-21]。但這些方法無法保證在波動的生理狀態下為患者提供持續的灌注,而且 CPAD 恒定血泵轉速開環控制算法在某些條件下仍然會產生抽吸現象。此外,有少量的研究使用閉環控制算法來解決 Fontan 循環衰竭的問題,比如通過保持 CPAD 進出口兩端壓力差來保證足夠的心輸出量及預防抽吸現象[22-24]。然而這些方法需要植入額外的壓力或流量傳感器來實現,但是,目前臨床上可植入式壓力和流量傳感器由于傳感器位置漂移或故障、測量值無法重新校正、血泵內血栓導致傳感器導管堵塞、使用時間過長導致的測量誤差等原因,無法長期使用[25-26]。
因此,本文擬通過搭建基于單心室患兒的 Fontan 循環衰竭和 CPAD 計算機仿真耦合模型,評估 CPAD 對于 Fontan 循環衰竭的效果,并通過體外實驗平臺對模型進行驗證。基于此模型提出了一種新穎的無傳感器反饋控制算法,該方法基于 CPAD 血泵轉速這一固有參數準確估算 CPPH 值,避免了臨床上無法長期使用壓力傳感器的缺點,并針對 CPPH 值設定 CPPH 參考值(CPPH reference,CPPHr),采用增益調度比例-積分(proportional-integral,PI)控制器,使實際 CPPH 值逐漸逼近參考值,從而保證循環系統中足夠的心輸出量,同時預防抽吸現象的發生。本文將設計的無傳感器反饋控制算法與基于傳感器的反饋控制算法以及 CPAD 恒定血泵轉速開環控制算法在各種生理條件下進行比較,以期最終實現改善心輸出量不足的問題,并達到預防 CPAD 恒定血泵轉速導致的腔靜脈抽吸現象的目的,同時為 CPAD 的優化選擇提供科學依據,從而提高 CPAD 對 Fontan 循環衰竭的治療和康復能力。
1 方法
1.1 基于單心室患兒的 Fontan 循環衰竭與 CPAD 計算機仿真耦合模型
本研究中的 4 歲單心室患兒 Fontan 循環模型,如圖 1 所示。此模型基于先前發表的人體循環系統計算機仿真模型改進。這種模型已經被成功驗證,并且能夠用于不同的 RBP 設計各種抽吸預防、生理控制以及故障檢測算法等[18, 27]。本文的單心室患兒 Fontan 循環模型根據文獻中報告的數值和臨床指導進行開發[28-30],方法上與成人 Fontan 模型相似。本文的仿真模型將 Fontan 循環系統分為單心室、心房、主動脈、冠狀動脈、鎖骨下動脈、體循環、腔靜脈、肺循環和瓣膜等模塊。這些集中參數模塊的特征由其自身的阻抗、順應性、壓力和血液容積決定,并且心房和單心室的順應性(C1 和 C2)是時變的。每個模塊的血液容積可由微分方程描述為容積(V)、順應性(C)和阻抗(R)的函數,如式(1)所示:
圖1
基于單心室患兒 Fontan 循環和 CPAD 的耦合模型
Figure1.
The coupled model of Fontan circulation for the children patients with a single ventricle and CPAD
|
式(1)中,dVn/dt 是第 n 個模塊容積的變化率,Fnin 是流入第 n 個模塊的血流量,Fnout 是流出第 n 個模塊的血流量。通過調節單心室的相關集中參數便可準確模擬 Fontan 循環衰竭狀態。具體模型參數分別為:R1 = 0.013 mm Hg·s/mL、R2 = 0.029 mm Hg·s/mL(二尖瓣打開)、R3 = 0.013 mm Hg·s/mL(主動脈瓣打開)、C3 = 0.266 mL/mm Hg、R4 = 0.01 mm Hg·s/mL、C4 = 0.211 mL/mm Hg、R5 = 0.5 mm Hg·s/mL、C5 = 57.84 mL/mm Hg、R6 = 0.04 mm Hg·s/mL、C6 = 0.029 mL/mm Hg、R7 = 0.071 mm Hg·s/mL、C7 = 22.13 mL/mm Hg、R8 = 0.22 mm Hg·s/mL、C8 = 26.82 mL/mm Hg。上述計算機仿真模型將與 CPAD 模型耦合。
本文中的 CPAD 即 Fontan 血泵模型基于 Choi 等[31]和 Pillay 等[32]提出的直流無刷電機 RBP 模型推導。CPAD 模型由如式(2)所示的微分方程描述:
|
式(2)中,J 是轉子慣性,ω 是 CPAD 的血泵轉速,單位是 rad/s,KB 是反電動勢常數,I 是作為控制變量的相電流,B 是阻尼系數,a0 和 a1 是相關常數,Fp 是 CPAD 血泵流量,單位是 mL/s,并可由如式(3)所示的微分方程描述:
|
式(3)中,CPPH 值以符號 CPPH 表示,b0、b1、b2 為實驗常數,式(2)和(3)中的參數通過實驗確定,分別為:J = 9.16 × 10?7 kg·m2、KB = 0.003 kg·m2/(A·s2)、B = 6.6 × 10-7 kg·m2/s、a0 = 7.38 × 10-13 kg·m2·s/mL3、a1 = 1.98 × 10?11 kg·m2·s/mL、b0 = ? 0.336 mm Hg·s/mL、b1 = ? 0.027 mm Hg·s2/mL、b2 = 9.33 × 10?5 mm Hg·s2。CPAD 模型的表達式只影響腔靜脈和肺循環的微分方程。
1.2 基于單心室患兒的 Fontan 循環衰竭與 CPAD 體外實驗模型
本文搭建的 Fontan 循環衰竭與 CPAD 體外實驗耦合模型如圖 2 所示,該模型中的 Fontan 循環系統分別由單心室、主動脈弓、主動脈順應性、體循環阻抗、TCPC、CPAD、肺動脈順應性、肺循環阻抗構成,其中心室和主動脈弓均由特殊的人工硅膠制成。本文所采用的 CPAD 是無刷直流葉輪離心式血液泵(SSC-500,蘇州瑛譜儀器設備有限公司,中國)。該血液泵使用 4.5~24 V 的直流電壓驅動無刷電機運轉,通過無刷電機的轉動來帶動葉輪的轉動,以達到傳輸液體的目的。CPAD 的液體流入口與上、下腔靜脈相連,液體流出口與左、右肺動脈相連,形成類似四通路的 TCPC。實驗用液體為水與甘油的混合液體(m∶m=3∶2),用于模擬人體正常血液粘度。另外,實驗采用流量計(FD-Q,Keyence Inc.,日本)測量心輸出量,采用壓力傳感器(DPT-100,Utah Medical Products Inc.,美國)測量主動脈壓力、肺動脈壓力以及腔靜脈壓力。
圖2
體外實驗模型以及相關硬件設備
Figure2.
The in-vitro experiment model and corresponding hardware devices
圖 2 還包括體外實驗模型所采用的硬件,分別是便攜式驅動系統及其配套控制器和數據采集器(SHS-100,蘇州瑛譜儀器設備有限公司,中國)以及 CPAD 控制器(DCP-500,蘇州瑛譜儀器設備有限公司,中國)。便攜式驅動系統是一種用于模擬心臟脈動的血液泵,性能包括可以實現液體的脈動循環、液體控溫加熱、壓力監控等,并且可為心臟及其周邊器官的植入物以及血管的模擬提供測試的動力源。動力源來自于便攜式驅動系統內置的定制化音圈電機,可通過驅動系統的控制器實現對電機運動的控制,通過調節心室內部液體循環往復量來模擬心室的生理和病理狀態。驅動系統內也內置了 2 個球瓣,分別用于模擬二尖瓣和主動脈瓣,通過兩個瓣膜的打開和閉合來模擬心室的收縮和舒張功能。CPAD 控制器屏幕上的數字顯示的是 CPAD 血泵最大轉速(9 600 r/min)的百分比,通過調節控制器上右側的旋鈕便可控制當前 CPAD 血泵轉速值。實驗中通過調節音圈電機、心率、主動脈順應性、體循環阻抗、肺動脈順應性以及肺循環阻抗來模擬 4 歲單心室患兒 Fontan 生理和病理特性的各種血流動力學參數。
1.3 控制方法的設計與數據分析
研究發現,肺動脈壓與 CPPH 值和心輸出量之間存在著一定的關系。因此,本文提出的具體控制算法是采用增益調度 PI 控制器調整控制系統的輸入 I,使得控制系統的輸出(即實際 CPPH 值)逼近控制目標 CPPHr,為人體循環系統提供足夠的生理灌注,同時避免由于 CPAD 恒定血泵轉速導致的抽吸現象的發生。采用增益調度 PI 控制器的主要原因在于這種控制器的設置只需要選擇合適的控制器系數和合適的 CPPHr。本研究中實際 CPPH 值使用擴展卡爾曼濾波器(extended Kalman filter,EKF)來準確估算[33],EKF 具體使用了 CPAD 的固有參數(帶噪音的 CPAD 血泵轉速)以及格雷-賽維斯基(Golay-Savitsky,GS)濾波器[34]。使用 EKF 是因為它與對角協方差矩陣相結合來假設模型誤差和處理噪聲,并且這種預測校正算法可以對噪聲數據進行遞歸操作,進而對系統狀態或參數產生統計上最優的實時估計[22]。因此 EKF 的使用不僅限于高斯噪聲,也適用于無法直接測量的系統狀態和參數。另外,本研究中的 GS 濾波器是一個由 17 個點組成的移動窗口,用于擬合二階多項式。該濾波器可以保持信號的峰值和谷值以濾除低頻和高頻噪聲。本研究對實際 CPAD 血泵轉速加入 2% 均勻分布的噪聲[22],進而對實際 CPPH 值進行估算。控制輸入,即 CPAD 電流利用如式(4)所示的控制律進行更新和修正:
|
式(4)中,CPPHr 是 CPPH 的參考值,以符號 CPPHr 表示;CPPH 的實際估計值(CPPH evaluate,CPPHe),以符號 CPPHe 表示;t 是時間,k1 和 k2 是自定義的控制器系數。如圖 3 所示為設計的無傳感器反饋控制算法流程圖。
圖3
設計的無傳感器反饋控制算法流程圖
Figure3.
Flowchart of the proposed sensorless feedback control algorithm
由于研究的對象為 4 歲單心室患兒 Fontan 循環模型,因此模擬的心率為 120 次/min,并且設定的參考值為 CPPHr = 8 mm Hg。在所有測試條件下,控制器系數 k1 和 k2 的值均保持不變,其中 k1 = 0.004、k2 = 0.000 8。本文將模擬在 Fontan 術后患兒循環衰竭的條件下,對設計的無傳感器反饋控制算法的效果和魯棒性進行評估,包括正常的腔靜脈阻抗以及腔靜脈阻抗快速增加 3 倍后極易發生腔靜脈抽吸現象的極端條件[22],并將本文中所提出的無傳感器反饋控制算法性能與基于傳感器的反饋控制算法以及 CPAD 恒定血泵轉速開環控制算法性能進行比較。其中,基于傳感器的反饋控制算法的實際 CPPH 值可通過兩個壓力傳感器分別測量腔靜脈與肺動脈的壓力得到;而 CPAD 恒定血泵轉速開環控制算法的輸入電流表達式與式(4)類似,區別在于參考值為 CPAD 血泵轉速,實際 CPAD 血泵轉速值逼近 CPAD 血泵轉速參考值,并且兩個控制器系數 k1 和 k2 分別為 0.01 和 5。
本文將在所有仿真和體外實驗條件下計算各種血流動力學參數并分析其相關特征,用轉速、壓力和血流量計算分析以下波形穩定后的具體血流動力學參數,包括:CPAD 血泵轉速、心輸出量、主動脈平均壓、收縮壓/舒張壓、腔靜脈壓、肺動脈壓、CPPH。定義腔靜脈的瞬時壓力不大于 1 mm Hg 時為抽吸現象[6]。
2 結果
Fontan 循環衰竭表現為心輸出量、主動脈收縮壓和舒張壓均要低于同等條件下正常兒童的血流動力學參數(正常 4 歲兒童的心輸出量不小于 3.0 L/min),同時也低于正常 Fontan 循環條件下患兒的血流動力學參數(正常 Fontan 循環條件下患兒的心輸出量接近于 3.0 L/min)[15]。Fontan 循環衰竭系統在有、無 CPAD 支持下基于計算機仿真和體外實驗的重要血流動力學結果如表 1 和圖 4 所示。圖 4 僅展示了當 CPAD 血泵轉速為 3 936 r/min 的曲線,因為此時實際 CPPH 值與參考值基本相等。本文之所以選擇表 1 中的三種 CPAD 血泵轉速,是為了說明當 CPAD 血泵轉速逐漸增大時,三種 CPAD 血泵轉速下產生的實際 CPPH 值也在逐漸增大,并且在 3 936 r/min 時的實際 CPPH 值最終超過了設定的 CPPH 參考值 8.0 mm Hg,為后面的無傳感器反饋控制算法結果做鋪墊。三種 CPAD 血泵轉速的選擇也考慮到了對于實際心輸出量的要求(2.9~3.0 L/min),若選擇的 CPAD 血泵轉速過小則不滿足患兒的實際心輸出量要求。另外,由于驅動系統為便攜式,過大的 CPAD 血泵轉速會導致整個系統中的液體溢出,使得體外實驗結果不嚴謹。從表 1 和圖 4 中可以看出,無論采用何種建模方式,心輸出量、主動脈收縮壓/舒張壓和平均壓以及肺動脈壓均隨著 CPAD 血泵轉速的增大而增大,而腔靜脈壓力隨著 CPAD 血泵轉速的增大而減小,實際 CPPH 值也隨著 CPAD 血泵轉速的增大而增大。計算機仿真和體外實驗結果的變化趨勢保持一致,并且在 Fontan 循環衰竭以及同等 CPAD 血泵轉速條件下,計算機仿真和體外實驗結果中的心輸出量和主動脈壓力(平均壓、收縮壓、舒張壓)非常接近。
圖4
Fontan 循環衰竭系統的血流動力學結果
Figure4.
Hemodynamic results of the Fontan circulation failure system
本研究中基于傳感器的反饋控制算法需要測量腔靜脈壓力和肺動脈壓力,將兩者的差值即實際 CPPH 值保持在 8 mm Hg。基于傳感器的反饋控制算法可以將心輸出量從基于 Fontan 循環衰竭狀態的 2.4 L/min 提升至 3.0 L/min,略大于正常 Fontan 循環條件下患兒的心輸出量,同時非常接近于正常 4 歲兒童的心輸出量,此時的主動脈壓力也明顯大于 Fontan 循環衰竭狀態的主動脈壓力,同時實際 CPPH 值準確地保持在 8 mm Hg,如表 2 所示。另外,基于傳感器的反饋控制算法沒有引起腔靜脈的抽吸現象,甚至是在腔靜脈阻抗快速(100~120 s 時,即 20 s 內)升高至 3 倍的情況下。相比較而言,CPAD 恒定血泵轉速開環控制算法的仿真結果如表 2 和圖 5 所示。根據基于傳感器的反饋控制算法的結果,CPAD 恒定血泵轉速開環控制算法選定的 CPAD 血泵轉速參考值是 3 903 r/min。結果表明,當腔靜脈阻抗不發生變化時,三種控制算法的所有血流動力學結果基本保持一致。然而,當腔靜脈阻抗快速增加 3 倍的時候,CPAD 恒定血泵轉速開環控制算法明顯導致了腔靜脈抽吸現象(CPAD 恒定血泵轉速開環控制算法中的腔靜脈壓力小于 1 mm Hg),同時實際 CPPH 值(10.7 mm Hg)也明顯大于設定的參考值。
圖5
三種控制算法在腔靜脈阻抗增加 3 倍條件下的結果對比
Figure5.
Comparison of results based on the three control algorithms during a 3-fold increase in vena cava resistance
相比較而言,無傳感器反饋控制算法僅需要 CPAD 血泵轉速來估算和保持 CPPH。與基于傳感器的反饋控制算法類似,設計的無傳感器反饋控制算法也能夠將心輸出量由 Fontan 循環衰竭狀態的 2.4 L/min 提升至 3.1 L/min,略大于正常 Fontan 循環條件下患兒的心輸出量,并于正常 4 歲兒童的心輸出量相當,主動脈壓力大于 Fontan 循環衰竭狀態的主動脈壓力,同時實際 CPPH 值準確地保持在 8 mm Hg,如表 2 所示。無傳感器反饋控制算法同樣也沒有在腔靜脈阻抗快速升高至 3 倍的情況下引起腔靜脈的抽吸現象。如表 2 和圖 5 所示,無傳感器反饋控制算法與基于傳感器的反饋控制算法的效果幾乎相同,但主要不同點在于由于 CPAD 血泵轉速噪音的存在,相關結果的實際波形會有少許波動,但最終也會趨于平穩。
另外,CPAD 血泵流量的實際值(無噪聲)/測量值(加噪聲的實際值)/估計值(有噪聲并通過 EKF 準確估算)、CPAD 血泵轉速的實際值/測量值/估計值以及 CPPH 的實際值和估計值之間的比較如圖 6 所示。測量的 CPAD 血泵流量和血泵轉速、估計的 CPAD 血泵流量和血泵轉速以及估計的實際 CPPH 值的均方根誤差(root mean squared error,RMSE)如表 3 所示。
圖6
CPAD 血泵流量、血泵轉速、CPPH 的結果比較
Figure6.
Comparison of results for CPAD pump flow, pump speed, and CPPH
3 討論與分析
過去 30 多年中,許多功能性單心室患兒接受 Fontan 治療后,最終發展為 Fontan 循環衰竭。目前,Fontan 循環衰竭患者的治療辦法包括藥物治療、Fontan 血流的手術優化以及機械循環輔助治療。其中,藥物治療局限性較大、副作用多。比如,利尿劑能夠減少組織中水含量,但要以犧牲循環血液容量為代價,而血液容量對維持心輸出量和循環的動態平衡至關重要。強心治療可以增加心室的收縮性,但對于前負荷不足的心室而言,這種治療效果不佳。前瞻性隨機試驗中,強心藥物磷酸二酯酶抑制劑顯現出一定的遠期效果,但其對心功能的改善程度尚不明確[35]。為了克服藥物治療的局限性,一些研究提出通過手術優化 TCPC 的方法[36]。但是,基于 TCPC 的外科手術仍然沒有大規模地應用于臨床。因此,對于 Fontan 循環衰竭的患者而言,迫切需要一種更為有效、實用的治療方法。
本文針對 CPAD 設計的無傳感器反饋控制算法能夠滿足 Fontan 循環系統的生理灌注需求。CPAD 對于控制系統的要求與 RBP 有著明顯的不同,CPAD 需要通過提高實際 CPPH 值進而提升心輸出量以及主動脈壓力。本文的研究結果表明,將實際 CPPH 值保持在約 8 mm Hg 即可恢復正常的 Fontan 循環系統。事實上,大多數 Fontan 患者單心室的收縮功能保持不變[37],但由于缺乏肺下動力源,即右心室,導致了心輸出量和主動脈壓力的降低。因此,本研究使用 CPAD 恢復肺下動力源并使 CPPH 增加至 8 mm Hg,可使 Fontan 循環與正常的雙心室生理學近似[12]。本文之所以將 CPPH 參考值設定在 8 mm Hg,原因在于之前基于新生以及幼年羔羊的動物實驗顯示,為了提高心輸出量,可將 CPPH 參考值設定在略高于 8 mm Hg[38]。因此,對于 Fontan 患兒而言,可將 CPPH 參考值設定為大約 8 mm Hg。需要指出的是,依賴于固有心室搏動指數等參數的抽吸預防策略不能適用于基于 CPAD 的控制系統,這是因為缺乏自然的右心室,腔靜脈和肺動脈的脈動性幾乎為零,計算機仿真和體外實驗均驗證了這一點。
本文提出的無傳感器反饋控制算法采用基于模型的方法來估計 CPPH,無需使用額外的壓力傳感器。雖然目前正在開發具有低位置偏移率的壓力傳感器[26],然而可供長期使用的這類可植入式傳感器的研發仍然是較大的挑戰,尤其是人工心臟設備血栓的形成以及傳感器故障等原因,無形中降低了傳感器的可靠性和安全性[25],并且內置額外壓力傳感器也會增加 CPAD 解決 Fontan 循環衰竭問題的復雜度和成本。而本研究所設計的無傳感器反饋控制算法的性能可與基于傳感器的反饋控制算法相媲美,并且就抽吸預防而言,其性能優于 CPAD 恒定血泵轉速開環控制算法。無傳感器反饋控制算法和基于傳感器的反饋控制算法均能夠在非生理性測試條件下(即腔靜脈阻抗快速增加 3 倍)有效避免腔靜脈抽吸現象。實際上,成倍增加動脈/靜脈阻抗是一種不常見的極端生理現象,本研究的目的是為了證明在這種極端條件下,設計的無傳感器反饋控制算法的性能依然會優于 CPAD 恒定血泵轉速開環控制算法。已經有文獻基于成人人工心臟的模型,在 3 倍增加肺靜脈和腔靜脈阻抗的極端條件下設計相關控制算法,并得到了理想的結果[22]。另外,雖然 CPAD 血泵流量、血泵轉速以及 CPPH 的估計值波形與實際值存在差異,但從結果來看,這些差異并沒有影響或降低無傳感器反饋控制算法的性能。上述參數的估計值與實際值之間的 RMSE 也較小,并且通過調節濾波器的特征,可以進一步減小由 EKF 和 GS 濾波器引起的 RMSE。
在實際設計當中,需要設計 CPAD 的葉輪和外殼之間有較大縫隙,這一點對于 CPAD 的幾何結構至關重要,其主要目的在于確保血泵發生故障時患者的安全。由于這些縫隙,當血泵工作后在進出口兩端產生 CPPH 時,反流(由于肺動脈壓力大于腔靜脈壓力而產生)與 CPAD 產生的正向血流會同時發生,從而導致心輸出量略小于 CPAD 血泵流量。
到目前為止,基于單心室 Fontan 循環的精準動物模型并不存在,利用計算機仿真和體外實驗平臺可以驗證和檢測 CPAD 對于 Fontan 循環衰竭的效果。但是,計算機仿真和體外實驗均不可避免地存在著一定的局限性,它們無法重現所有預期的臨床效果,也無法體現真正動物實驗的重要性和意義,并且這些模型不能模擬神經體液反應、組織重構以及基因和蛋白的表達。本文所選用的計算機仿真模型假設了 Fontan 循環系統模型中的參數為集中參數,并且血液為牛頓流體[27, 31]。另外,基于 CPAD 的體外實驗中腔靜脈壓力和肺動脈壓力與計算機仿真結果有比較明顯的差別,這主要是由于體外實驗中用于模擬肺循環的部分使用了具有一定長度和順應性的特制硅膠導管以及用于測量各種壓力的傳感器本身固有的測量誤差導致的,但是這些因素并不會影響本文所設計的無傳感器反饋控制算法的性能和效果。盡管還存在著一定的不足和局限性,但是本文的研究驗證了將 CPAD 應用于 Fontan 循環衰竭以及 CPAD 控制系統對于提高心輸出量和防止腔靜脈抽吸現象的可行性,可為 CPAD 的優化設計以及 Fontan 循環衰竭治療方案的制定提供參考依據。
4 結論
本文針對功能性單心室患兒的 Fontan 循環衰竭問題設計了 CPAD 這種特殊的機械輔助裝置,并通過計算機仿真和體外實驗搭建了 Fontan 循環衰竭和 CPAD 的耦合模型。通過仿真和實驗的相互驗證,測試了 CPAD 對于 Fontan 循環衰竭的效果。結果表明,CPAD 能夠有效提高 Fontan 循環衰竭患者的心輸出量,提高主動脈壓力,進而改善 Fontan 循環衰竭的狀況。本文針對此 CPAD 設計了無傳感器反饋控制算法。與 CPAD 恒定血泵轉速開環控制算法相比,該無傳感器反饋控制算法不僅能夠滿足 Fontan 循環衰竭患兒對于心輸出量的需求,同時可以避免腔靜脈抽吸現象的發生。本文所設計的耦合模型和無傳感器反饋控制算法的實際臨床效果仍然需要利用優化的體外實驗以及多次大型動物實驗來進一步驗證。
利益沖突聲明:本文全體作者均聲明不存在利益沖突。