傳統髖離斷假肢轉動中心常置于接受腔前下方而與健康側髖關節轉動中心位置不對稱,導致假肢運動與健康下肢運動對稱性差;且多數為被動關節,需要依靠截肢者代償提髖動作實現假肢運動,同樣的行走運動相比正常人需要多消耗 2~3 倍的能量。本文提出一種基于遠程運動中心(RCM)機構的動力髖離斷假肢(HDPs)。采用雙平行四邊形設計方法,以機構的最小尺寸為目標,利用遺傳算法進行尺寸優化,實現了假肢旋轉中心與健康側下肢旋轉中心相對稱;通過分析人體行走過程中髖關節力矩和角度關系曲線,控制系統鏡像健康側下肢運動參數,利用并聯驅動器系統為假肢提供助力。在建立的 SolidWorks、ADAMS 虛擬樣機聯合仿真平臺上進行髖離斷假肢的運動仿真并得到變化曲線,通過與健康下肢、傳統假肢量化對比,分析設計方案的科學性。結果顯示,本設計能夠實現預期的效果,設計方案具有可行性。
引用本文: 段崇群, 李新偉, 何秉澤, 鄧志鵬, 喻洪流. 基于遠程運動中心機構的動力髖離斷假肢的設計與仿真. 生物醫學工程學雜志, 2021, 38(3): 549-555, 562. doi: 10.7507/1001-5515.202007042 復制
版權信息: ?四川大學華西醫院華西期刊社《生物醫學工程學雜志》版權所有,未經授權不得轉載、改編
引言
全世界每年有數以千萬的人因為戰爭、意外事故和疾病而截肢,穿戴假肢是幫助他們恢復運動能力的重要方式之一[1]。假肢按穿戴者截肢部位的不同分成上肢假肢和下肢假肢。髖離斷假肢(hip disarticulation prostheses,HDPs)屬于下肢假肢,主要適用于髖關節離斷、半骨盆切除以及大腿殘肢過短的截肢者,受到醫學發展水平的限制,肢體再生技術目前不能應用于人體,穿戴髖離斷假肢是髖離斷截肢者恢復運動能力的唯一手段。此類截肢者人數約占全世界下肢截肢者總人數的 1.2%[2-3],相關的科學研究也因此發展緩慢。
研究表明,髖離斷截肢者對現有髖離斷假肢接受度較低,主要原因是髖離斷假肢穩定性差、行走時步態僵硬、能量消耗較多——約為正常人的三倍[4-5]。已知最早關于髖離斷假肢的研究記錄是 1954 年加拿大多倫多退伍軍人事務部康復服務中心的 McLaurin 發明的加拿大式髖離斷假肢,他的研究揭開了制造現代髖離斷假肢的生物力學原理[6]。加拿大式髖離斷假肢是一種外骨骼式的髖離斷假肢,采用樹脂真空工藝制作假肢的接受腔,接受腔的前下方有固定髖關節的單軸鉸鏈;接受腔底部和膝關節之間安裝了彈性帶,可以為髖關節伸展提供助力和限制屈曲角度。該設計的主要特點有:① 假肢髖關節位于人體重心的下前方,合理的對線能夠保證整體穩定性,同時避免突然的屈膝動作,保證行走的安全;② 接受腔與人體組織是全接觸,保證良好的承重性;③ 行走時,接受腔和大腿之間有大約 15° 的相對運動,有利于髖關節屈曲和假肢擺動。實驗結果顯示,設計初步達到了幫助使用者安全站立行走的預期目標,為髖離斷假肢的改進設計奠定了基礎。之后,美國加利福尼亞大學生物力學實驗室的 Radcliffe[7]在 1957 年以加拿大式髖離斷假肢為例討論了髖離斷假肢在穿戴過程中的生物力學描述、殘肢的功能解剖等問題,闡述了假肢穿戴過程中的力學關系,進一步發展了現代髖離斷假肢的理論體系。
為了減少假肢穿戴者在行走過程中的能量消耗,部分假肢關節會設計驅動助力裝置。目前發展較為完善的假肢關節,如假肢膝關節,常用電機或者液壓裝置作為驅動單元,為穿戴者的行走運動提供助力。但是由于髖離斷假肢對穩定性要求較高,同時滿足高穩定性和高靈活性具有較大的困難,所以當前的研究和應用主要集中在被動式假肢方面,且多采用單軸鏈接的固定方式。2014 年墨西哥工程與先進技術跨學科研究院的 Valentino 提出了一種多連桿型髖離斷假肢,設計使用氣彈簧在擺動期對假肢提供助力,對減少穿戴者的能量消耗有積極作用,但是假肢在伸展和屈曲階段的運動依靠截肢者提胯實現,對于減少能量損耗作用有限,而且氣彈簧設計對假肢的運動范圍、體積造成了限制[8]。正常髖關節為三自由度活動關節,為最大程度恢復其功能,Ludwigs 等[4]在 2010 年提出了 Helix3D 髖離斷假肢,借助球狀關節和四連桿機構可以實現空間內三自由度運動,并且可以預設關節阻尼,針對運動能力不強的穿戴者,為了穩定安全,可以設定高阻尼模式,而對于運動能力較強的穿戴者,可通過設定低阻尼模式提高靈活性。該研究不僅一定程度上還原了髖關節的三自由度運動能力,而且利用阻尼設計減少了假肢穿戴者的能量消耗。另外值得注意的是,髖離斷假肢是包括髖關節、膝關節、踝關節以及足部假體在內的綜合性假肢,改善假肢的性能,提高接受度,需要靈活適配各個假肢關節和系統性康復訓練[9-10]。
關于行走時步態僵硬等問題,同濟大學的張振龍在 1996 年開展了關于單軸髖離斷假肢步態畸形及穩定性差問題的研究。在分析人體髖關節的解剖結構和運動特點基礎上,首次提出了用單自由度空間機構設計假肢髖關節的設想,并結合髖關節的生理結構和使用條件設計了空間髖關節機構[11]。文中分析了空間機構的假肢髖關節在矢狀面內的軌跡,并對額狀面和水平面運動軌跡誤差較大的問題做了初步分析,提出球面機構作為設計的思路。這項工作改變了使用單軸鉸鏈和平面機構作為假肢髖關節部分的傳統方式,探索了用空間機構模擬髖關節生理機構作為假肢髖關節的可行性。通過對傳統髖離斷假肢和髖關節生理結構的分析可以發現,傳統假肢與接受腔鏈接固定方式多采用單軸鉸鏈設計,假肢回轉中心被置于接受腔前下方,而健康人體的髖關節回轉中心是在盆骨內側的髖臼位置,即現有假肢無法實現轉動中心與健康髖臼旋轉中心的重合[9],這種異常安裝位置會使得正常股骨和假肢之間產生長度差異[12],不但影響肢體的對稱性、穩定性,導致步態畸形,而且大幅度增加了穿戴者的能量消耗。因此,如果能將假肢的回轉中心重新恢復到髖臼位置,實現假肢和健康肢體轉動中心的對稱,還原生理結構,則可解決假肢與健康下肢長度差等問題,提高假肢性能。經過統計和分析,解決髖離斷假肢旋轉中心不對稱問題主要有三種方法:① 將髖離斷假肢固定在骨盆接受腔的側邊;② 利用五桿機構設計六自由度假肢結構,使得假肢在髖臼周圍運動;③ 使用遠程運動中心(remote center of mechanism,RCM)機構使髖離斷假肢繞髖臼運動。在 2017 年,日本大阪大學研究人員 Naito 提出了一個側面設計的髖離斷假肢設計方案,使用類似外骨骼設計還原假肢轉動中心到截肢側髖臼。通過與傳統加拿大式髖離斷假肢對比實驗發現,還原假肢髖關節轉動中心后,假肢與健康下肢運動曲線更加接近,行走步態對稱性顯著提高[13]。該實驗結果進一步驗證了還原假肢關節旋轉中心、復原其生理結構對改善髖離斷假肢穿戴者的行走步態具有積極作用。
針對上述問題,本文提出了一種基于 RCM 機構的髖離斷假肢設計方案,利用 RCM 機構解決假肢和健康側下肢旋轉中心不對稱和長度不同的問題,通過遺傳算法優化假肢關節結構尺寸,借助并聯驅動器為假肢擺動提供助力,解決髖離斷假肢動力缺失的問題。最后在建立的 SolidWorks、ADAMS 虛擬樣機聯合仿真平臺上進行運動仿真,通過其與傳統假肢和健康人體運動參數的對比分析,分析了設計的可行性。
1 材料與方法
1.1 基于髖關節生物力學分析的并聯驅動器設計
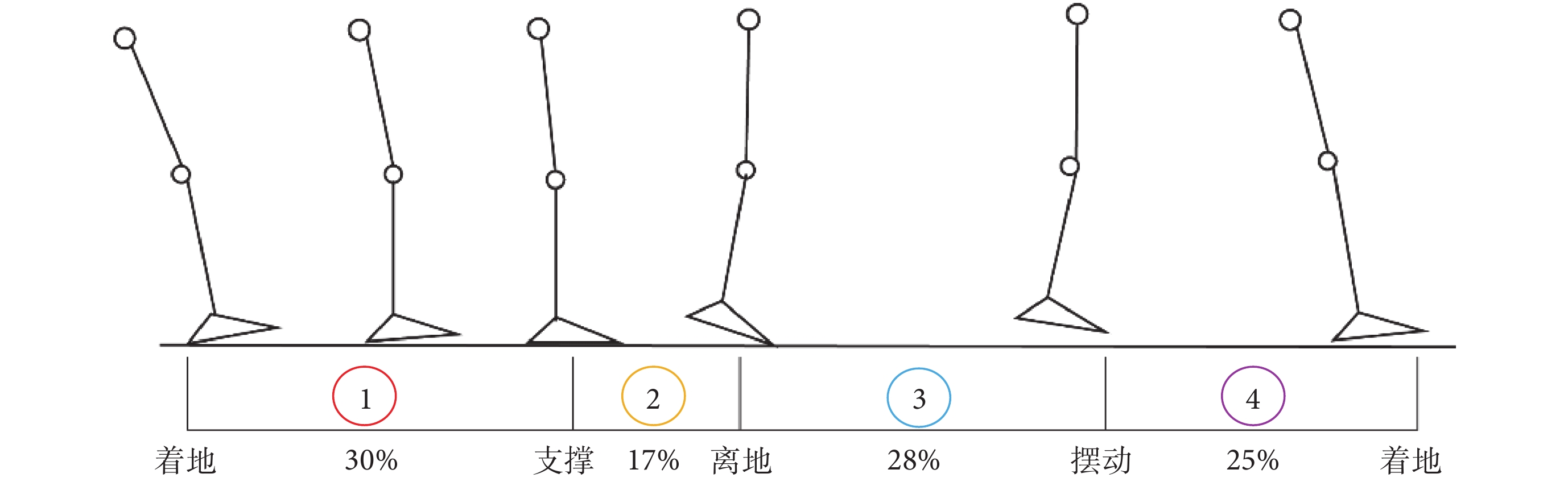
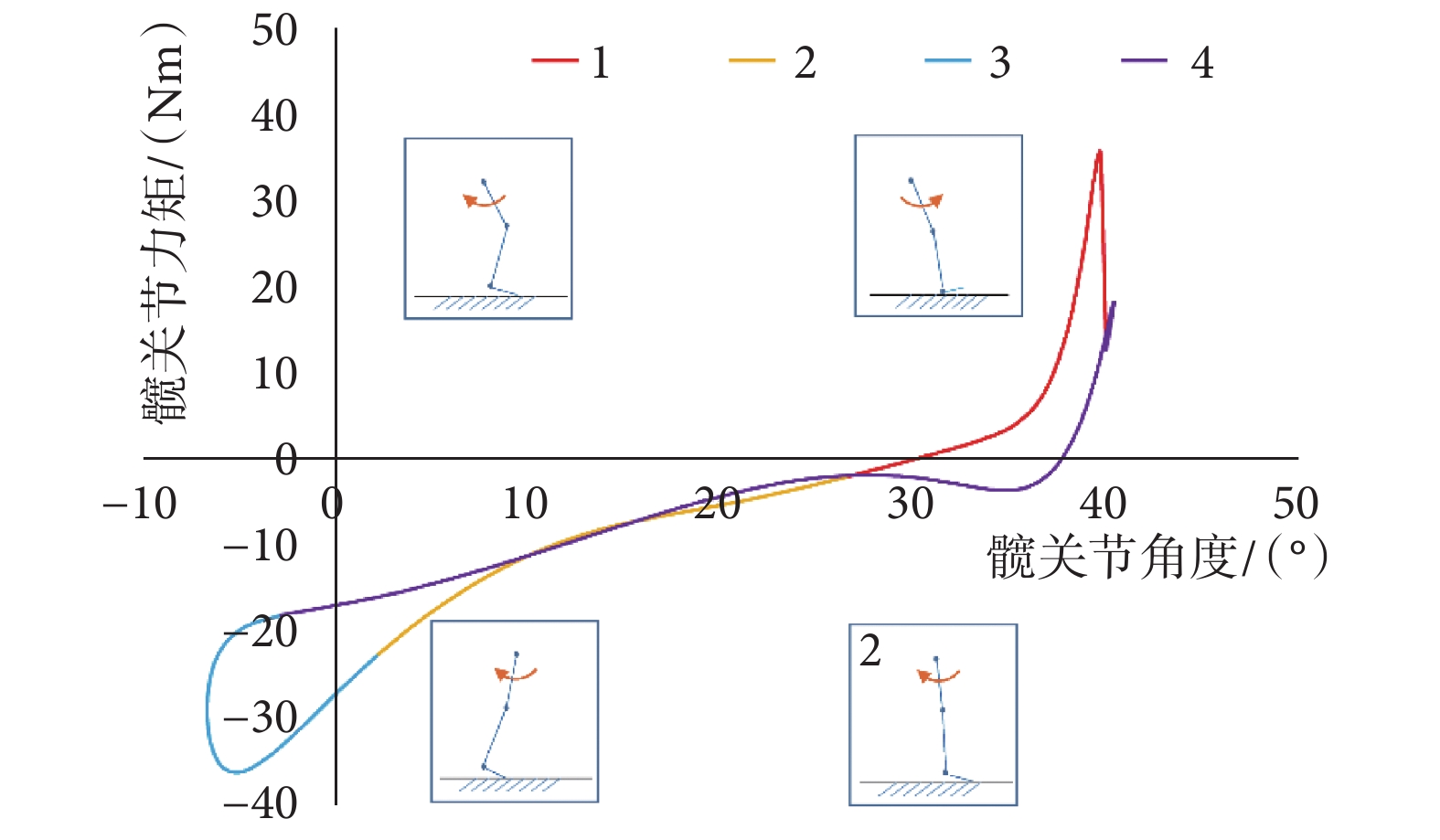
通過對健康人體髖關節的運動范圍、行走過程中的關節力矩變化情況進行分析,可以為髖離斷假肢的結構尺寸、驅動器等設計提供依據。圖 1 為人在平地行走時一個步態周期內髖關節的運動相位圖,圖 2 是通過人體運動光學采集系統 VICON 和地面反作用力板采集相關數據處理得到的關節角度-力矩關系圖。根據肌肉作用特點將髖關節的運動進一步分為四個階段,并使用四種不同顏色曲線表示四個運動階段,這四個運動階段劃分與圖 1 所示的人體運動相位圖對應。
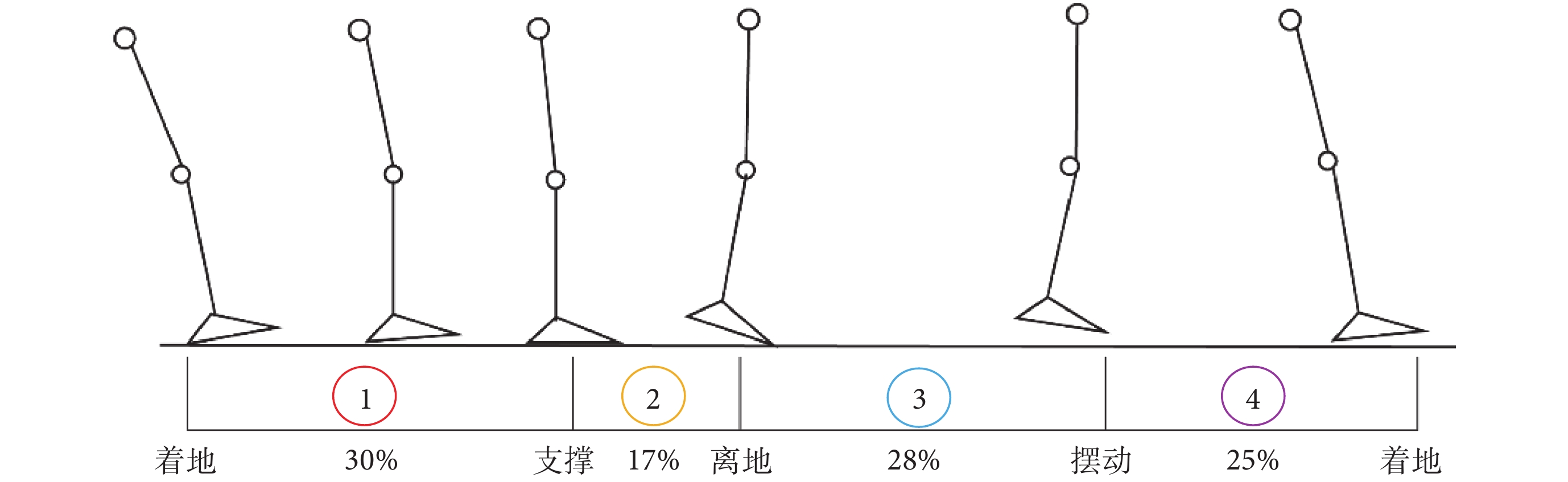 圖1
一個步態周期內體髖關節的運動相位圖
Figure1.
A phase diagram of the motion of the hip joint during a gait cycle
圖1
一個步態周期內體髖關節的運動相位圖
Figure1.
A phase diagram of the motion of the hip joint during a gait cycle
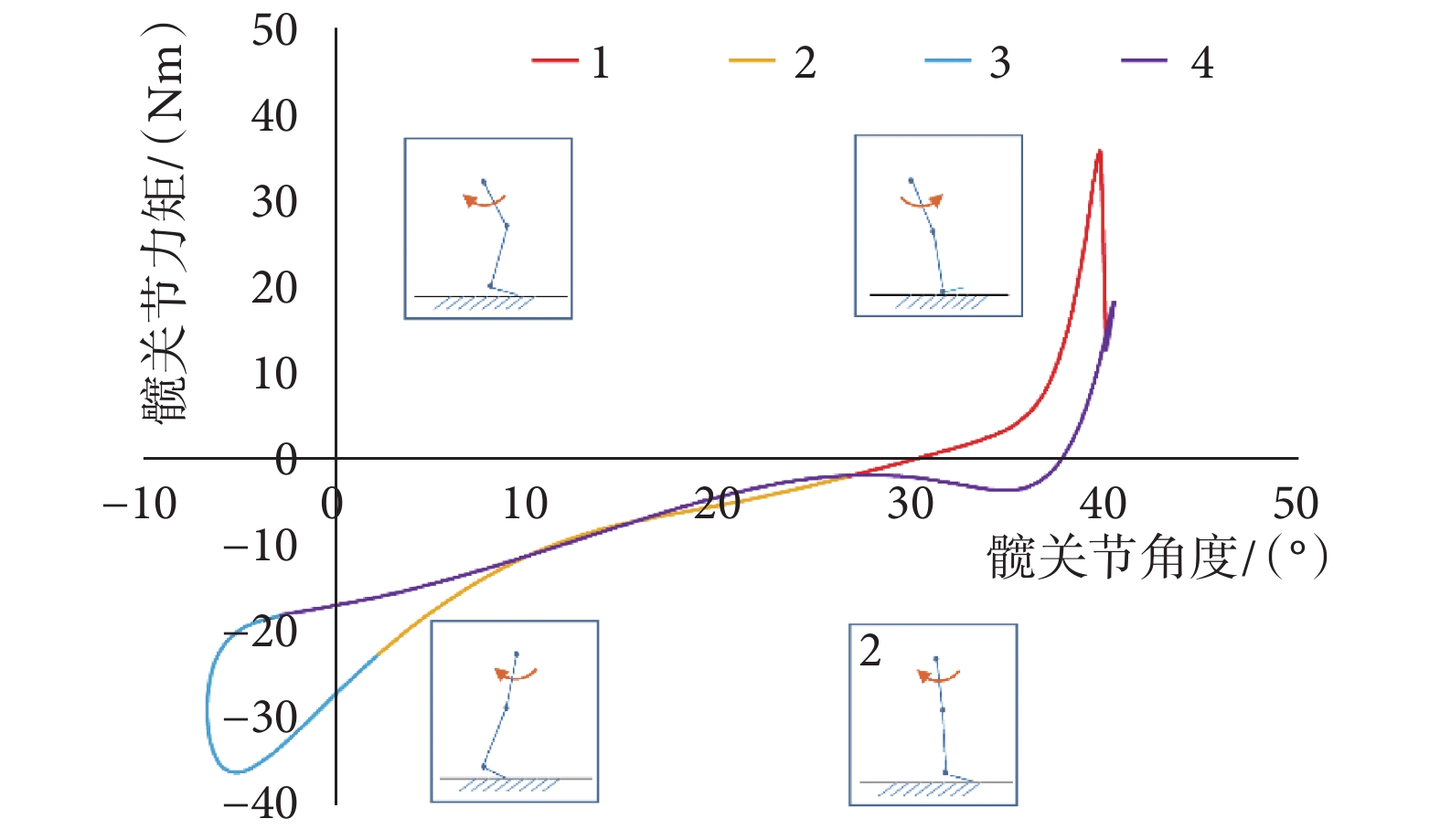 圖2
一個步態周期內體髖關節關節力矩-角度關系圖
Figure2.
An angular-moment diagram of the hip joint during a gait cycle
圖2
一個步態周期內體髖關節關節力矩-角度關系圖
Figure2.
An angular-moment diagram of the hip joint during a gait cycle
階段 1,人體腳跟著地,髖關節做伸展運動從最大屈曲角運動至 0° 左右,關節力矩會達到一次峰值,髖關節伸展肌群起緩沖人體接觸地面和伸展邁步的作用;階段 2,髖關節做伸展運動至最大伸展角,關節力矩逐漸增大,髖關節伸展肌群起主要作用,支撐身體繞支撐腿腳做倒立擺動至豎直位置并提高身體質心,推動軀干向前移動;階段 3,髖關節做屈曲運動,關節角度從 ?15° 左右變化到最大角度,之后回到 ?10° 左右,此時,關節力矩較小,主要是屈曲肌群起緩沖髖關節伸展運動的作用,同時為后續的擺腿動作儲能助力;階段 4,髖關節伸展肌群和屈曲肌群共同作用,形成拮抗效應使關節保持一定的剛度,直至擺動完成。關節屈伸主要由周邊肌群作用實現,肌肉通過軸線方向的伸縮來實現關節的運動,其動作方式和直線驅動器相似。所以,本設計采用對稱分布的直線位移驅動器來模擬人體的肌肉,為假肢運動提供助力。
1.2 仿生髖關節設計
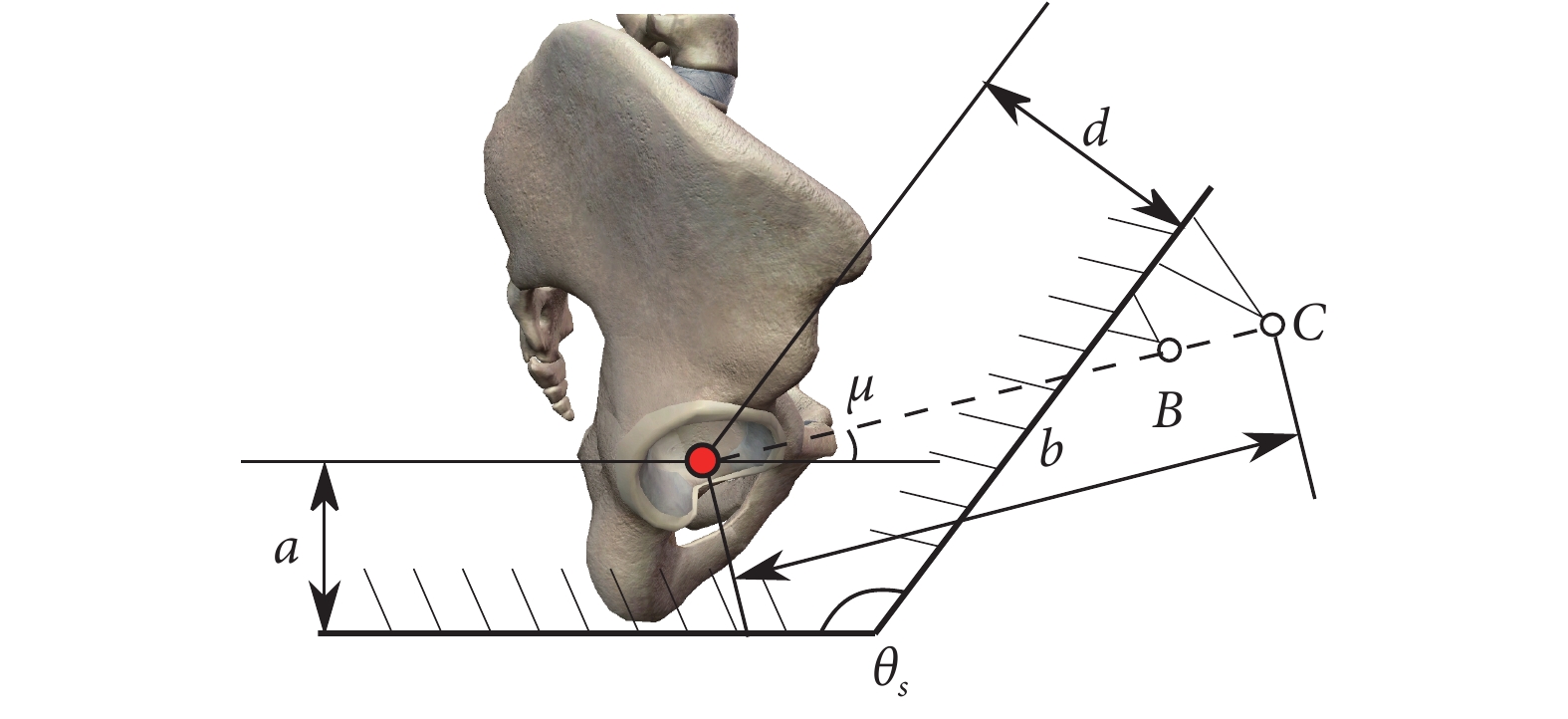
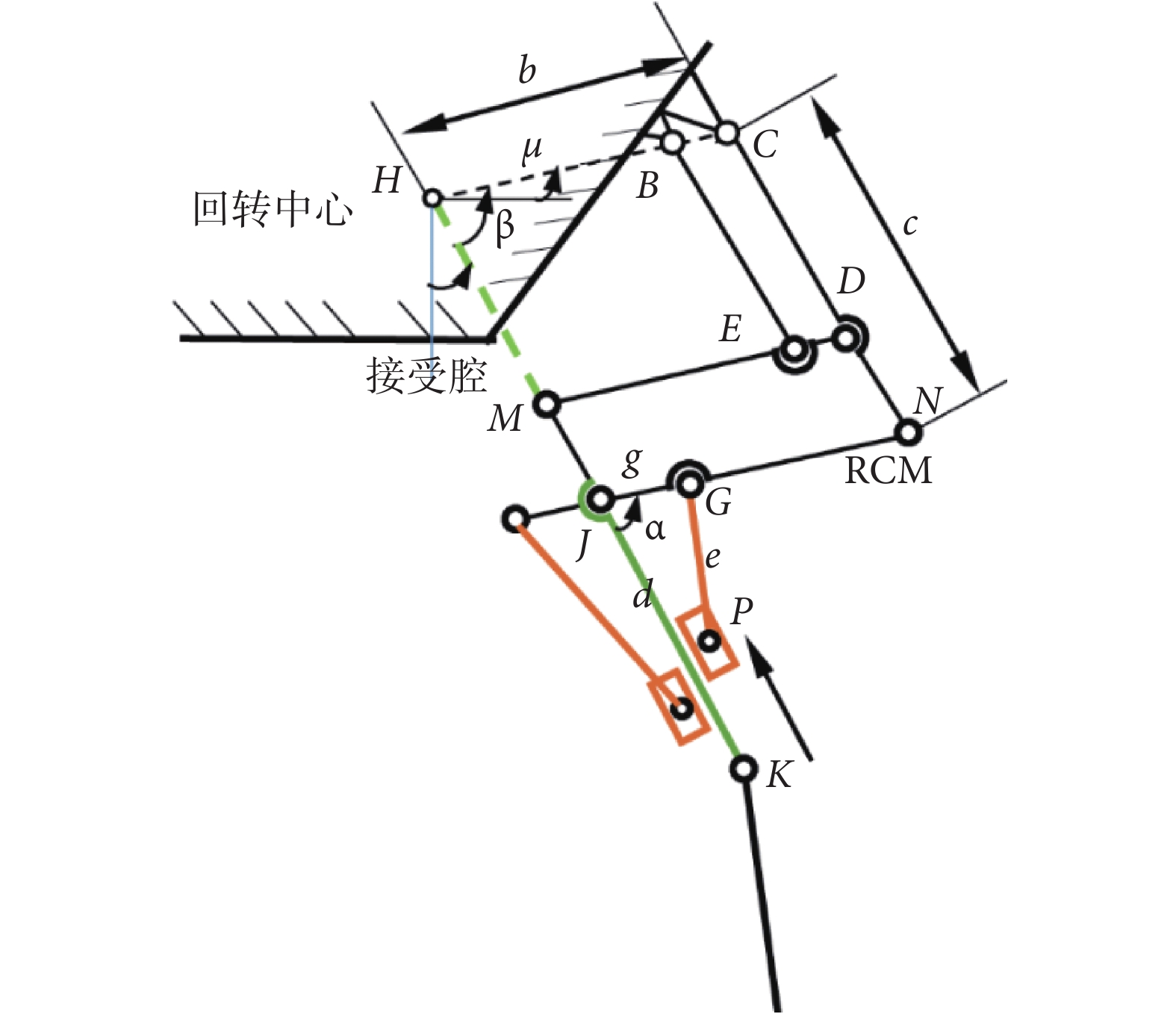
假肢關節的設計尺寸與人體髖臼位置、盆骨和截肢剩余組織尺寸有關。本設計原型對象是一名 25 歲的中國男性,身高 170 cm,體重 66 kg,相關參數如表 1 所示,包括坐姿肘關節的高度、坐姿髖關節的寬度和髖關節周長;髖臼相關測量尺寸,如圖 3 所示。由髖臼位置得到 RCM 機構尺寸,其結構簡圖如圖 4 所示,然后使用遺傳算進行優化[14-15],實現 RCM 機構體積的最小化,同時實現對假肢的包裹,消除截肢者穿戴假肢時的心理障礙,提高其接受度[16]。該對象了解實驗內容后簽署知情同意書。本研究方案通過上海健康醫學院醫學倫理委員會的批準。
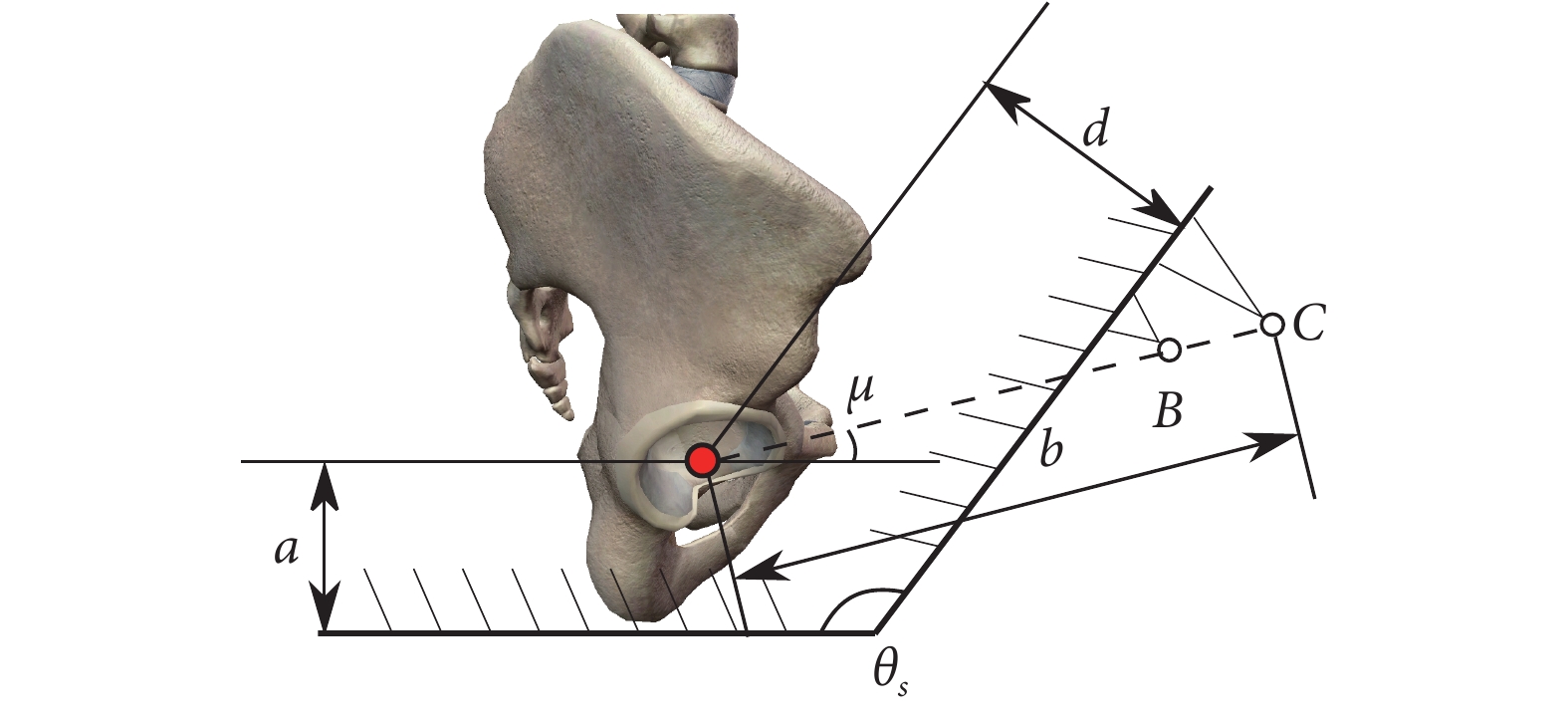 圖3
髖臼位置測量法
Figure3.
Acetabulum position measuring method
圖3
髖臼位置測量法
Figure3.
Acetabulum position measuring method
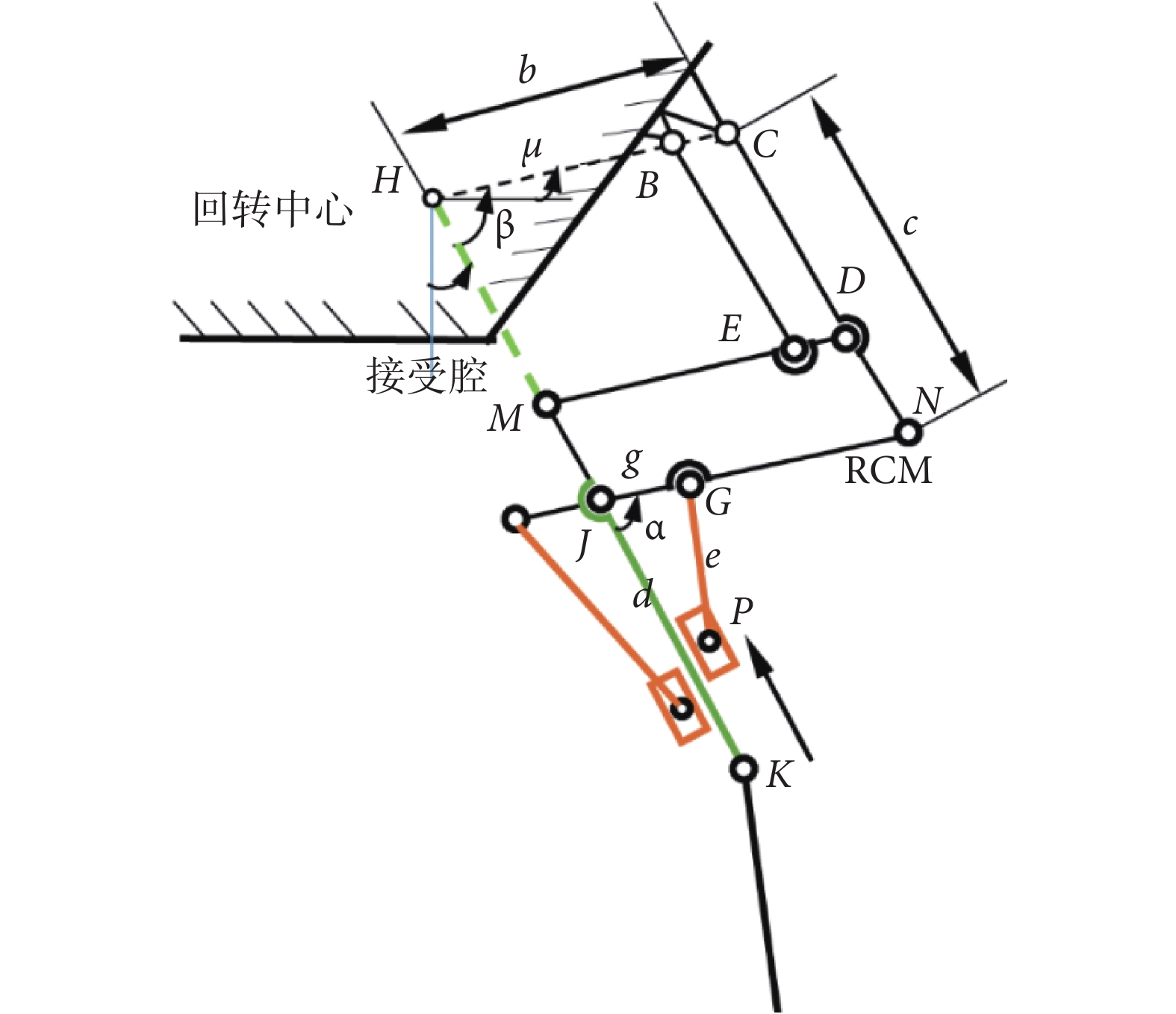 圖4
RCM-HDP 結構簡圖
Figure4.
Structure of RCM-HDP
圖4
RCM-HDP 結構簡圖
Figure4.
Structure of RCM-HDP
在實現轉動中心與髖臼重合的基礎上,尺寸參數 b 和 c 限制著 RCM 機構整體尺寸,機構 S 區域的目標函數可以表示為:
 |
式中 BC = σ1NJ,CD = σ2CN。該部分的優化目標是使最大積分尺寸 S 小于或等于接受腔  (矢狀面寬度)的一半。根據 RCM 機構尺寸要求和不動點位置,優化函數受以下約束條件約束:
(矢狀面寬度)的一半。根據 RCM 機構尺寸要求和不動點位置,優化函數受以下約束條件約束:
 |
其中  表示從髖臼到接受腔底部的高度,定義為:
表示從髖臼到接受腔底部的高度,定義為:
 |
本文利用 MATLAB GA 工具箱進行優化,表 2 列出了優化中使用的參數。
2 模型和仿真
2.1 整體方案
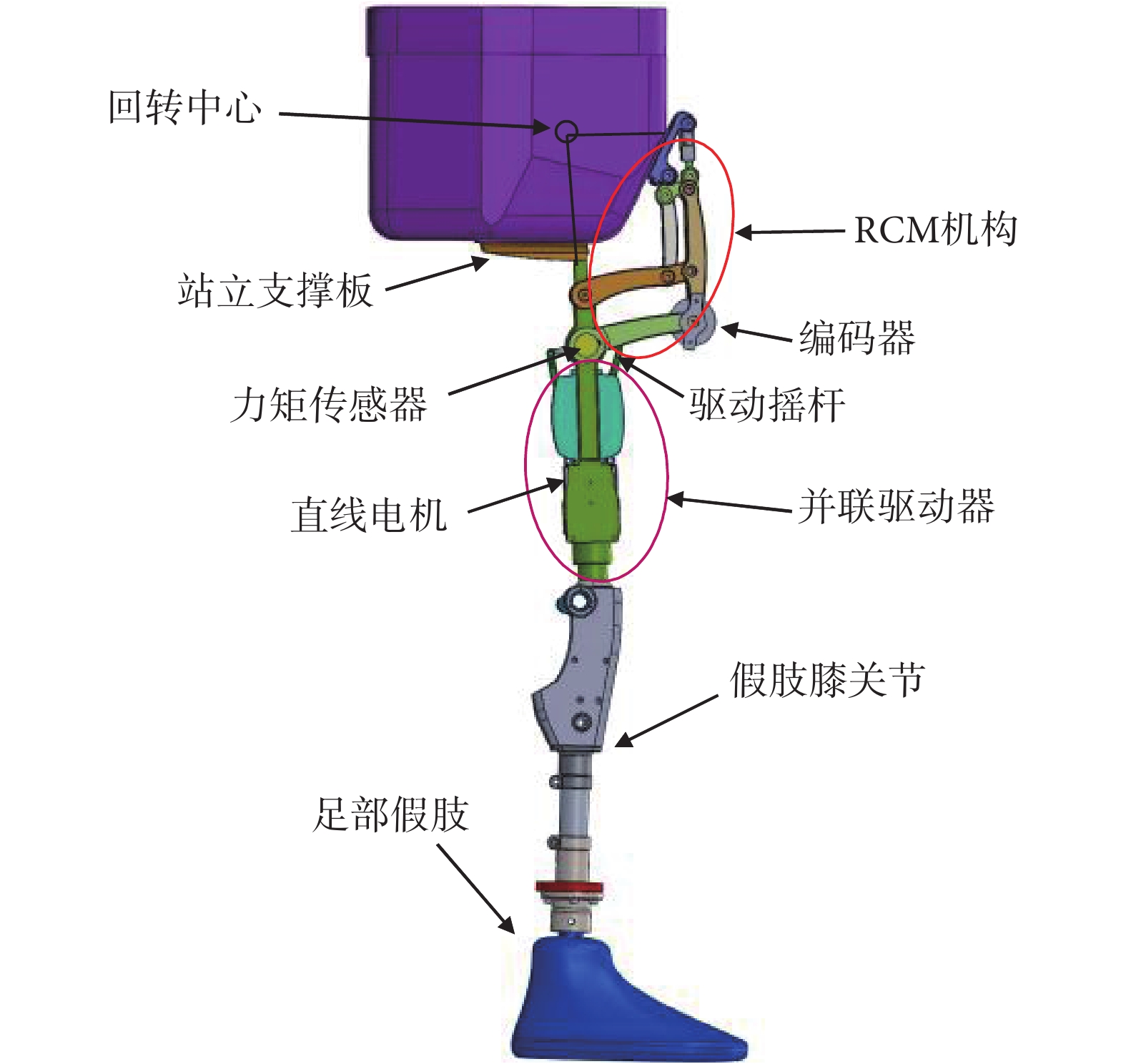
下肢假肢由髖離斷假肢、膝關節假肢和足部假肢組成。本文中髖離斷假肢的設計是在理想化膝關節假肢和足部假肢基礎上開展的,主要由 RCM 機構、并聯驅動器、站立支撐板、扭矩傳感器等組成,其轉動范圍是 ?17° 旋轉到 95°,包括從 ?15° 到 75° 的擺動相位和 90° 的坐姿狀態,表 3 是以式(1)收斂到最小值為目標,經過 200 次迭代優化得到的詳細設計參數。控制方面:首先通過 VICON 設備采集健康人體下肢步態運動學信息并通過多層前饋網絡(back propagation neural network,BP 神經網絡)建立穿戴髖關節假肢患者健康側和假肢側的運動學映射關系;使用九軸姿態傳感器采集人體健康側下肢關節運動學參數(角速度、角加速度等)并進行數據預處理提取步態特征,之后由 BP 神經網絡建立健康側-假肢側的運動學映射關系生成假肢側運動的參考步態相位,結合建立的下肢假肢動力學模型通過比例積分微分控制(proportional integral derivative control,PID 控制)調節兩個直線驅動器運動。據研究表明,髖關節運動中的最大力矩值產生在單腿支撐期,此時下肢各關節的高剛度特性實現對人體的支撐,在髖關節屈曲伸展階段,關節力矩在 25 Nm 之間。針對此分析,再結合截肢者偏弱的運動能力等情況,在利用支撐板等結構保證支撐性要求的基礎上,選用 M3508 無刷電機,配合滾珠絲杠和 2 mm 線徑彈簧為關節提供力矩,重量大約在 1 200 g,總功率在 100 W 左右。圖 5 為設計方案的三維模型圖。
25 Nm 之間。針對此分析,再結合截肢者偏弱的運動能力等情況,在利用支撐板等結構保證支撐性要求的基礎上,選用 M3508 無刷電機,配合滾珠絲杠和 2 mm 線徑彈簧為關節提供力矩,重量大約在 1 200 g,總功率在 100 W 左右。圖 5 為設計方案的三維模型圖。
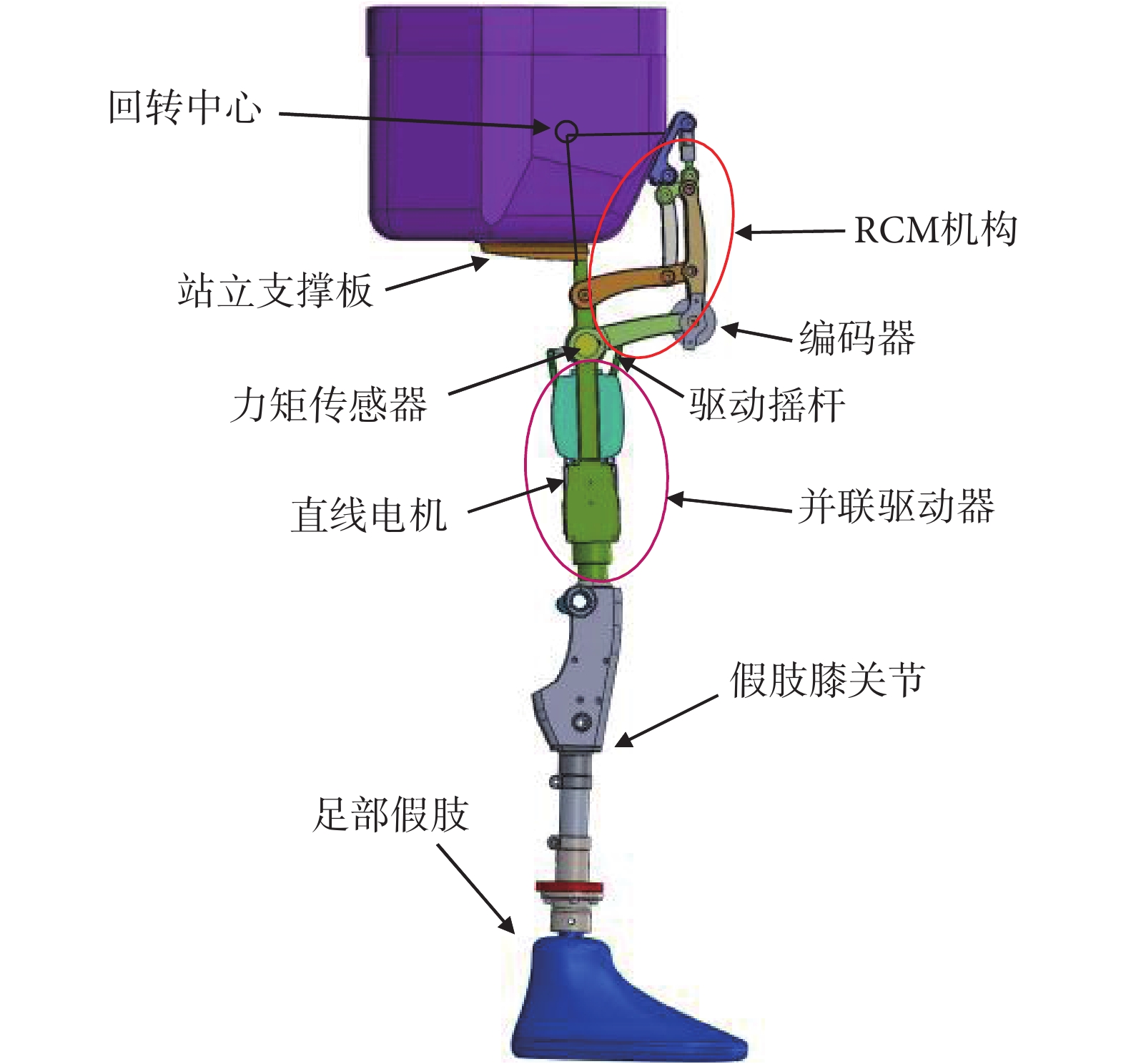 圖5
RCM-HDP 三維模型圖
Figure5.
3D model diagram of RCM-HDP
圖5
RCM-HDP 三維模型圖
Figure5.
3D model diagram of RCM-HDP
2.2 髖離斷假肢運動仿真分析
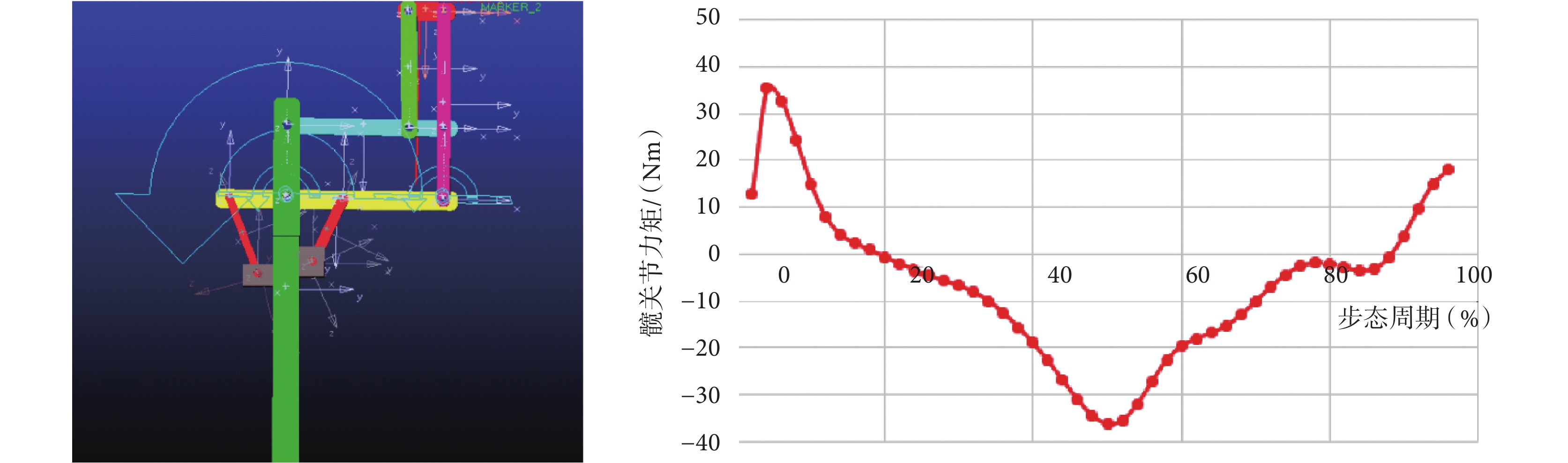
使用 SolidWorks 軟件建立簡化的髖離斷假肢樣機模型,將模型保存為 Parasolid 格式的文件并導入 ADAMS 軟件中,對模型的各個零件自定義材料屬性;添加固定副、轉動副等約束,把原本與接受腔固定的零件與大地固定,在驅動連桿作用的轉動副位置添加驅動使得虛擬樣機滿足所需的運動方式。簡化髖離斷假肢模型如圖 6 所示。仿真首先進行驅動設置,使其按照預設的軌跡方式運動[17]。由于假肢控制原理是鏡像健康側下肢的運動參數,控制目標是實現假肢關節運動與截肢者健康側關節運動變化的最大程度對稱,故依據前述實驗所得的人體行走運動中的髖關節力矩變化曲線作為虛擬樣機輸入 STEP 函數驅動的依據,如圖 6 所示,然后把虛擬樣機關節運動副上的 Motion 函數改成 STEP 函數,表 4 為函數參數,最后完成虛擬樣機運動仿真。
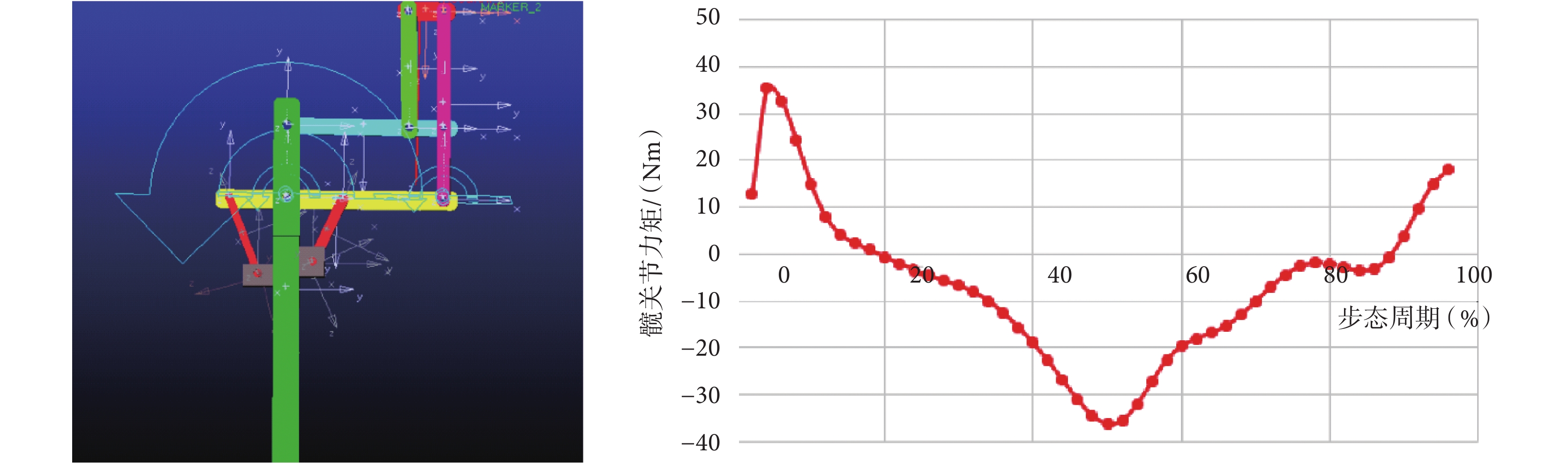 圖6
ADAMS 中簡化的髖離斷假肢模型和驅動力矩曲線
Figure6.
The simplified hip prosthesis model in ADAMS and driving moment curve
圖6
ADAMS 中簡化的髖離斷假肢模型和驅動力矩曲線
Figure6.
The simplified hip prosthesis model in ADAMS and driving moment curve
3 結果和討論
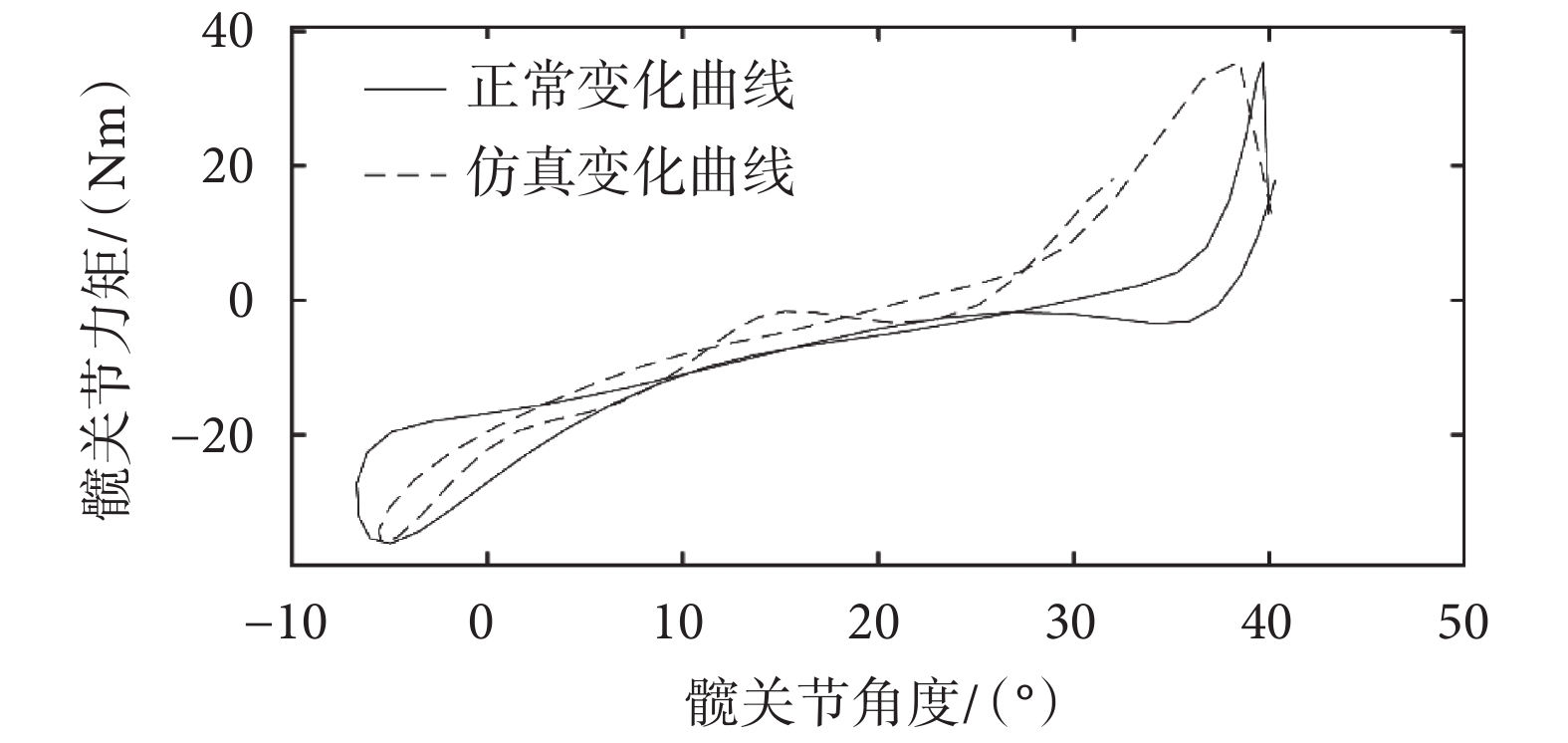
在 ADAMS 中設置仿真時間及仿真步長進行仿真,進入 ADAMS/Postprocessor 模塊,仿真完成后得到一個步態周期內髖關節角度變化數據,經 MATLAB 處理得到仿真輸出和健康下肢的髖關節角度-力矩變化曲線和不同速度下的髖關節角度變化曲線,見圖 7。
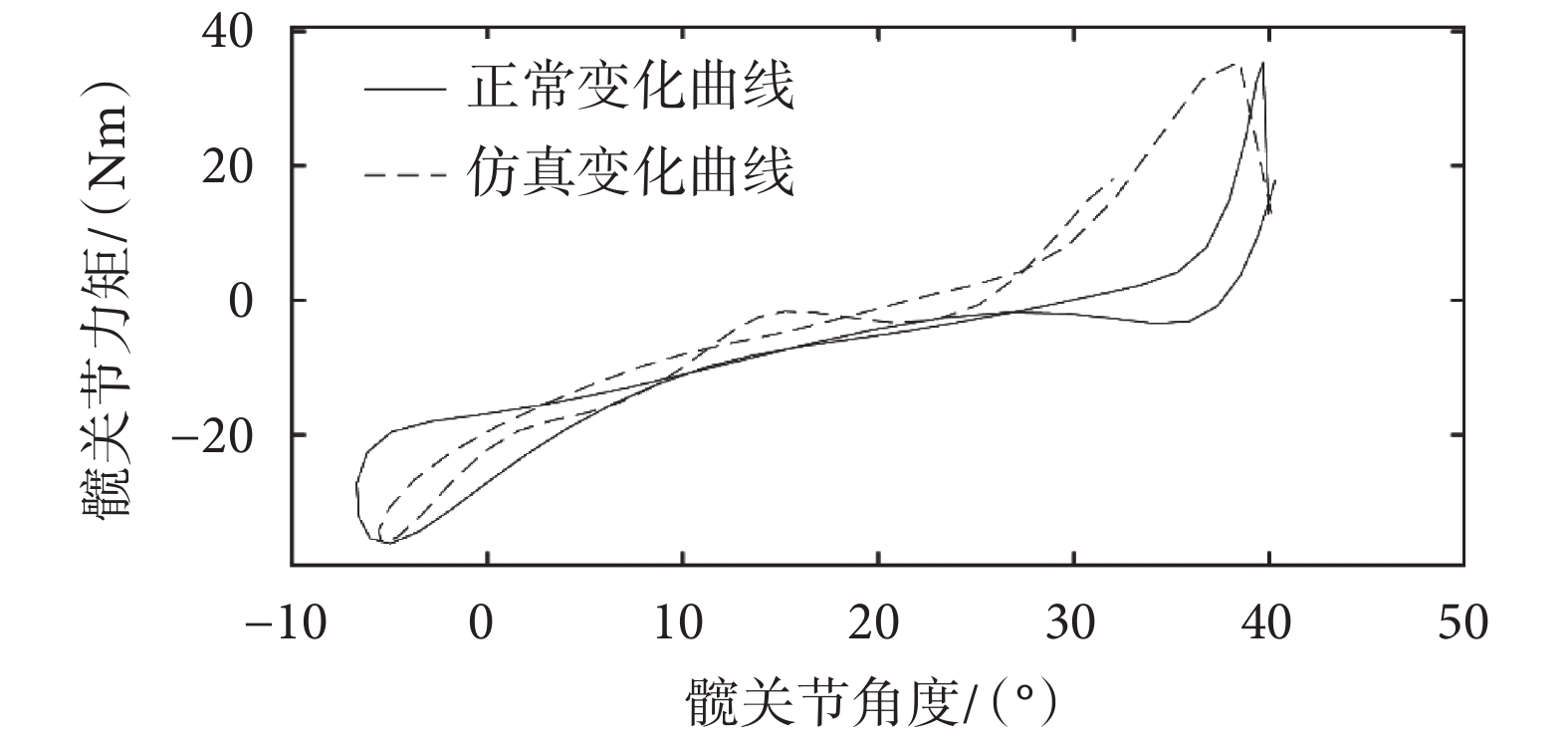 圖7
髖離斷假肢運動仿真輸出曲線
Figure7.
Simulation output curve of joint motion of hip prosthesis
圖7
髖離斷假肢運動仿真輸出曲線
Figure7.
Simulation output curve of joint motion of hip prosthesis
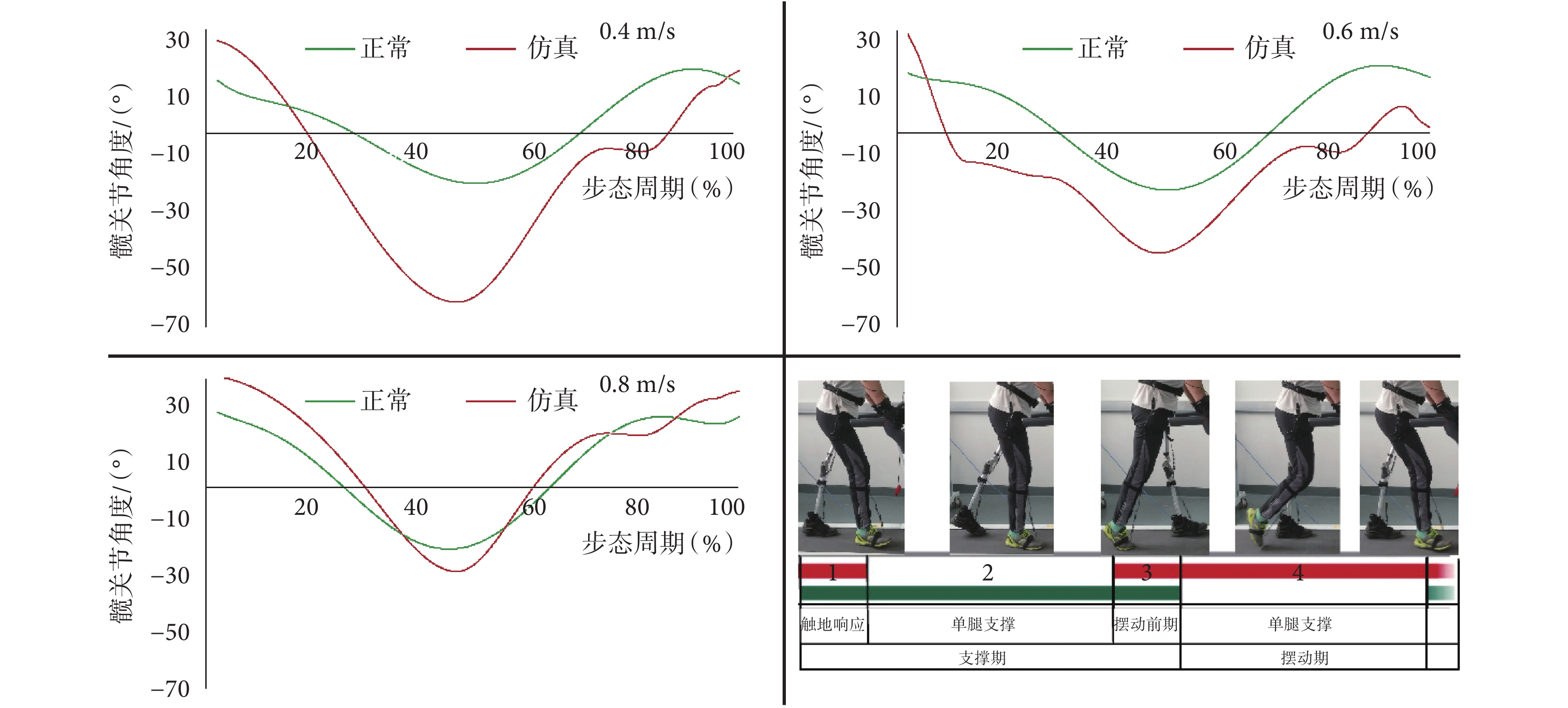
經過上述相同操作步驟,對模型施加 0.4、0.6、0.8 m/s 三種步速下的關節驅動力矩,得到一個步態周期內髖關節角度-時間變化數據,處理得到仿真輸出和健康下肢的髖關節角度-時間變化曲線,如圖 8 中所示三種步速下的變化曲線,以及實驗過程中采集截肢者健康側下肢運動步態參數示意圖。
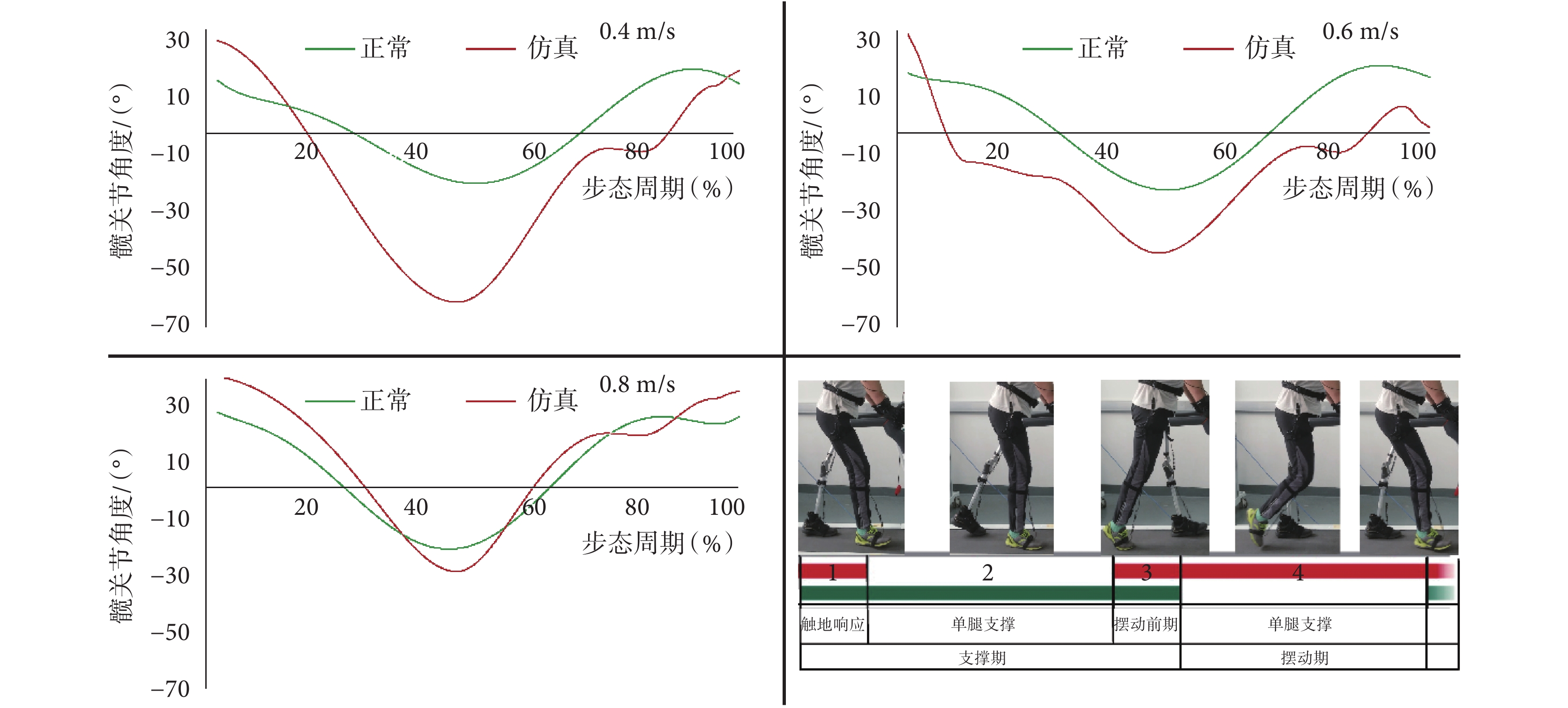 圖8
不同步速下髖關節角度變化曲線
Figure8.
Angular change curves of hip joint under asynchronous velocity
圖8
不同步速下髖關節角度變化曲線
Figure8.
Angular change curves of hip joint under asynchronous velocity
為量化分析步態參數對稱性,根據下肢兩側運動參數使用對稱性分析指標[18],公式如下:
 |
公式中  和
和  分別代表左右側肢體的步態參數,本文中,
分別代表左右側肢體的步態參數,本文中, 代表模型或 7E7(Ottobock)假肢步態參數,
代表模型或 7E7(Ottobock)假肢步態參數, 代表健康下肢的步態參數。在公式(4)中,
代表健康下肢的步態參數。在公式(4)中, =1 表示兩側運動數據完全對稱,結果中正負號表示位置側的主導地位。為驗證設計方案的假肢與健康側下肢運動的對稱性,采用步態運動特征參數如步幅、最小髖關節角度[19],對稱性量化結果如表 5 所示。
=1 表示兩側運動數據完全對稱,結果中正負號表示位置側的主導地位。為驗證設計方案的假肢與健康側下肢運動的對稱性,采用步態運動特征參數如步幅、最小髖關節角度[19],對稱性量化結果如表 5 所示。
根據表 5 分析,針對步幅的對稱性指標, 由原來的 50% 提高到 97%,最小髖關節角度由 5% 提高到 83%。設計模型與傳統假肢 7E7 相比在對稱性方面有了一定提高。觀察圖 7 可以發現,兩條曲線的變化趨勢基本相似,關節力矩變化在正常范圍以內;但是,與健康下肢運動情況相比,曲線階段 1 出現了間斷,階段 3、階段 4 出現了跳躍,階段 1 中關節力矩變化快于正常變化情況。觀察圖 8 可以發現,隨著速度的增加,髖關節模型的伸展角度逐漸變小,符合正常行走步態特征;而髖關節模型在不同速度下的伸展角度比正常屈曲角度大,伸展角度也會因為速度的不同而出現一定的偏差;總體分析可知,與傳統髖離斷假肢(7E7)相對比,基于 RCM 機構的髖離斷假肢通過還原假肢關節的轉動中心、復原人體生理結構后,步態對稱性有了明顯提高。而出現偏差的主要原因是利用處理過的運動數據建立驅動函數與真實情況存在的誤差,而且樣機模型只是髖關節模型,沒有構建完整的下肢模型,其剛度、裝配等也存在誤差,因此造成了仿真輸出曲線與理想曲線之間的差異。
由原來的 50% 提高到 97%,最小髖關節角度由 5% 提高到 83%。設計模型與傳統假肢 7E7 相比在對稱性方面有了一定提高。觀察圖 7 可以發現,兩條曲線的變化趨勢基本相似,關節力矩變化在正常范圍以內;但是,與健康下肢運動情況相比,曲線階段 1 出現了間斷,階段 3、階段 4 出現了跳躍,階段 1 中關節力矩變化快于正常變化情況。觀察圖 8 可以發現,隨著速度的增加,髖關節模型的伸展角度逐漸變小,符合正常行走步態特征;而髖關節模型在不同速度下的伸展角度比正常屈曲角度大,伸展角度也會因為速度的不同而出現一定的偏差;總體分析可知,與傳統髖離斷假肢(7E7)相對比,基于 RCM 機構的髖離斷假肢通過還原假肢關節的轉動中心、復原人體生理結構后,步態對稱性有了明顯提高。而出現偏差的主要原因是利用處理過的運動數據建立驅動函數與真實情況存在的誤差,而且樣機模型只是髖關節模型,沒有構建完整的下肢模型,其剛度、裝配等也存在誤差,因此造成了仿真輸出曲線與理想曲線之間的差異。
在之前的應用研究中,Radcliffe 指出,加拿大型髖離斷假肢置于盆骨下前位置的單軸鉸鏈安裝方式,影響了假肢運動能力,而且現有同類型假肢大部分保留了這種設計方式。真正探究這種安裝方式異常帶來問題的,只有同濟大學的張振龍和日本的 Naito 教授,前者提出單自由度空間機構設計假肢髖關節的方案,并對其矢狀面內軌跡做了研究,但只停留在公式計算的理論層面;后者提出外骨骼式假肢髖關節,通過將假肢安裝在盆骨側面實現圍繞髖臼旋轉。從實驗結果來看,假肢的性能有了一定程度提升,但側邊安裝的設計會造成支撐不足的問題,給使用安全帶來巨大隱患;同時,使用時異常的外部形狀也會影響接受度,這都制約了其應用和發展。本設計則是在綜合前人研究的基礎上,以還原人體生理結構為目標,以 RCM 機構為設計原型,利用優化算法和計算機仿真軟件驗證思路的科學性、可行性。其中,多目標優化是機構設計的重要環節,尤其是平行四桿機構,Li 等[20]利用全局條件指數在一定范圍內對滿足體積約束的微創手術機器人進行了優化,通過與全局條件指數結果的對比,驗證了有效性。本設計利用遺傳算法進行尺寸優化,更加簡單地控制了假肢的整體尺寸,實現衣物對假肢的包裹。
從仿真結果分析可知,本設計方案具有一定的可行性和科學性,對髖離斷假肢的發展具有積極作用,但未來開展實際應用還需要作深入探索,特別是在如下方面:① 整體體積和重量的控制,假肢體積與外觀之間有緊密關系,實際應用中需要著重考慮減小假肢體積,便于穿戴和包裹美化,有利于提高使用者對假肢的接受度;② 電機選型,小體積、高性能的電機可以更好地控制假肢體積和能量的消耗,在實際工作中還需要針對性設計驅動方案和電機型號,以便更好地提升假肢性能;③ 驅動機構協調控制,基于關節剛度為目標的控制策略,對于協調驅動電機的變化速度、距離等方面有著較為嚴格的要求,還需要進一步探索。
4 結論
針對傳統髖離斷假肢兩大問題:轉動中心與健康側髖關節大轉子位置不對稱,從而導致穿戴者行走步態畸形,以及純機械被動式設計消耗能量較大,本文設計了一種基于 RCM 機構的動力髖離斷假肢。利用遺傳算法優化整體結構尺寸,配合設計了仿生并聯彈性驅動器為假肢提供助力,在建立的 SolidWorks、ADAMS 虛擬樣機聯合仿真,初步驗證了該設計的可行性。結果顯示,與傳統假肢相比,所設計的基于 RCM 的假肢能夠提高行走步態的對稱性,對于改善穿戴者行走步態具有積極作用。
致謝:我們誠摯地感激河南孫有志、上海云耀蛟和上海假肢廠有限公司呂永兵,在研究中孫有志先生和云耀蛟先生讓我們了解到髖離斷截肢者的行走習慣和假肢穿戴反饋等,呂永兵總經理在假肢的結構設計和對線等調整方面提供了寶貴的建議。
利益沖突聲明:本文全體作者均聲明不存在利益沖突。
引言
全世界每年有數以千萬的人因為戰爭、意外事故和疾病而截肢,穿戴假肢是幫助他們恢復運動能力的重要方式之一[1]。假肢按穿戴者截肢部位的不同分成上肢假肢和下肢假肢。髖離斷假肢(hip disarticulation prostheses,HDPs)屬于下肢假肢,主要適用于髖關節離斷、半骨盆切除以及大腿殘肢過短的截肢者,受到醫學發展水平的限制,肢體再生技術目前不能應用于人體,穿戴髖離斷假肢是髖離斷截肢者恢復運動能力的唯一手段。此類截肢者人數約占全世界下肢截肢者總人數的 1.2%[2-3],相關的科學研究也因此發展緩慢。
研究表明,髖離斷截肢者對現有髖離斷假肢接受度較低,主要原因是髖離斷假肢穩定性差、行走時步態僵硬、能量消耗較多——約為正常人的三倍[4-5]。已知最早關于髖離斷假肢的研究記錄是 1954 年加拿大多倫多退伍軍人事務部康復服務中心的 McLaurin 發明的加拿大式髖離斷假肢,他的研究揭開了制造現代髖離斷假肢的生物力學原理[6]。加拿大式髖離斷假肢是一種外骨骼式的髖離斷假肢,采用樹脂真空工藝制作假肢的接受腔,接受腔的前下方有固定髖關節的單軸鉸鏈;接受腔底部和膝關節之間安裝了彈性帶,可以為髖關節伸展提供助力和限制屈曲角度。該設計的主要特點有:① 假肢髖關節位于人體重心的下前方,合理的對線能夠保證整體穩定性,同時避免突然的屈膝動作,保證行走的安全;② 接受腔與人體組織是全接觸,保證良好的承重性;③ 行走時,接受腔和大腿之間有大約 15° 的相對運動,有利于髖關節屈曲和假肢擺動。實驗結果顯示,設計初步達到了幫助使用者安全站立行走的預期目標,為髖離斷假肢的改進設計奠定了基礎。之后,美國加利福尼亞大學生物力學實驗室的 Radcliffe[7]在 1957 年以加拿大式髖離斷假肢為例討論了髖離斷假肢在穿戴過程中的生物力學描述、殘肢的功能解剖等問題,闡述了假肢穿戴過程中的力學關系,進一步發展了現代髖離斷假肢的理論體系。
為了減少假肢穿戴者在行走過程中的能量消耗,部分假肢關節會設計驅動助力裝置。目前發展較為完善的假肢關節,如假肢膝關節,常用電機或者液壓裝置作為驅動單元,為穿戴者的行走運動提供助力。但是由于髖離斷假肢對穩定性要求較高,同時滿足高穩定性和高靈活性具有較大的困難,所以當前的研究和應用主要集中在被動式假肢方面,且多采用單軸鏈接的固定方式。2014 年墨西哥工程與先進技術跨學科研究院的 Valentino 提出了一種多連桿型髖離斷假肢,設計使用氣彈簧在擺動期對假肢提供助力,對減少穿戴者的能量消耗有積極作用,但是假肢在伸展和屈曲階段的運動依靠截肢者提胯實現,對于減少能量損耗作用有限,而且氣彈簧設計對假肢的運動范圍、體積造成了限制[8]。正常髖關節為三自由度活動關節,為最大程度恢復其功能,Ludwigs 等[4]在 2010 年提出了 Helix3D 髖離斷假肢,借助球狀關節和四連桿機構可以實現空間內三自由度運動,并且可以預設關節阻尼,針對運動能力不強的穿戴者,為了穩定安全,可以設定高阻尼模式,而對于運動能力較強的穿戴者,可通過設定低阻尼模式提高靈活性。該研究不僅一定程度上還原了髖關節的三自由度運動能力,而且利用阻尼設計減少了假肢穿戴者的能量消耗。另外值得注意的是,髖離斷假肢是包括髖關節、膝關節、踝關節以及足部假體在內的綜合性假肢,改善假肢的性能,提高接受度,需要靈活適配各個假肢關節和系統性康復訓練[9-10]。
關于行走時步態僵硬等問題,同濟大學的張振龍在 1996 年開展了關于單軸髖離斷假肢步態畸形及穩定性差問題的研究。在分析人體髖關節的解剖結構和運動特點基礎上,首次提出了用單自由度空間機構設計假肢髖關節的設想,并結合髖關節的生理結構和使用條件設計了空間髖關節機構[11]。文中分析了空間機構的假肢髖關節在矢狀面內的軌跡,并對額狀面和水平面運動軌跡誤差較大的問題做了初步分析,提出球面機構作為設計的思路。這項工作改變了使用單軸鉸鏈和平面機構作為假肢髖關節部分的傳統方式,探索了用空間機構模擬髖關節生理機構作為假肢髖關節的可行性。通過對傳統髖離斷假肢和髖關節生理結構的分析可以發現,傳統假肢與接受腔鏈接固定方式多采用單軸鉸鏈設計,假肢回轉中心被置于接受腔前下方,而健康人體的髖關節回轉中心是在盆骨內側的髖臼位置,即現有假肢無法實現轉動中心與健康髖臼旋轉中心的重合[9],這種異常安裝位置會使得正常股骨和假肢之間產生長度差異[12],不但影響肢體的對稱性、穩定性,導致步態畸形,而且大幅度增加了穿戴者的能量消耗。因此,如果能將假肢的回轉中心重新恢復到髖臼位置,實現假肢和健康肢體轉動中心的對稱,還原生理結構,則可解決假肢與健康下肢長度差等問題,提高假肢性能。經過統計和分析,解決髖離斷假肢旋轉中心不對稱問題主要有三種方法:① 將髖離斷假肢固定在骨盆接受腔的側邊;② 利用五桿機構設計六自由度假肢結構,使得假肢在髖臼周圍運動;③ 使用遠程運動中心(remote center of mechanism,RCM)機構使髖離斷假肢繞髖臼運動。在 2017 年,日本大阪大學研究人員 Naito 提出了一個側面設計的髖離斷假肢設計方案,使用類似外骨骼設計還原假肢轉動中心到截肢側髖臼。通過與傳統加拿大式髖離斷假肢對比實驗發現,還原假肢髖關節轉動中心后,假肢與健康下肢運動曲線更加接近,行走步態對稱性顯著提高[13]。該實驗結果進一步驗證了還原假肢關節旋轉中心、復原其生理結構對改善髖離斷假肢穿戴者的行走步態具有積極作用。
針對上述問題,本文提出了一種基于 RCM 機構的髖離斷假肢設計方案,利用 RCM 機構解決假肢和健康側下肢旋轉中心不對稱和長度不同的問題,通過遺傳算法優化假肢關節結構尺寸,借助并聯驅動器為假肢擺動提供助力,解決髖離斷假肢動力缺失的問題。最后在建立的 SolidWorks、ADAMS 虛擬樣機聯合仿真平臺上進行運動仿真,通過其與傳統假肢和健康人體運動參數的對比分析,分析了設計的可行性。
1 材料與方法
1.1 基于髖關節生物力學分析的并聯驅動器設計
通過對健康人體髖關節的運動范圍、行走過程中的關節力矩變化情況進行分析,可以為髖離斷假肢的結構尺寸、驅動器等設計提供依據。圖 1 為人在平地行走時一個步態周期內髖關節的運動相位圖,圖 2 是通過人體運動光學采集系統 VICON 和地面反作用力板采集相關數據處理得到的關節角度-力矩關系圖。根據肌肉作用特點將髖關節的運動進一步分為四個階段,并使用四種不同顏色曲線表示四個運動階段,這四個運動階段劃分與圖 1 所示的人體運動相位圖對應。
圖1
一個步態周期內體髖關節的運動相位圖
Figure1.
A phase diagram of the motion of the hip joint during a gait cycle
圖2
一個步態周期內體髖關節關節力矩-角度關系圖
Figure2.
An angular-moment diagram of the hip joint during a gait cycle
階段 1,人體腳跟著地,髖關節做伸展運動從最大屈曲角運動至 0° 左右,關節力矩會達到一次峰值,髖關節伸展肌群起緩沖人體接觸地面和伸展邁步的作用;階段 2,髖關節做伸展運動至最大伸展角,關節力矩逐漸增大,髖關節伸展肌群起主要作用,支撐身體繞支撐腿腳做倒立擺動至豎直位置并提高身體質心,推動軀干向前移動;階段 3,髖關節做屈曲運動,關節角度從 ?15° 左右變化到最大角度,之后回到 ?10° 左右,此時,關節力矩較小,主要是屈曲肌群起緩沖髖關節伸展運動的作用,同時為后續的擺腿動作儲能助力;階段 4,髖關節伸展肌群和屈曲肌群共同作用,形成拮抗效應使關節保持一定的剛度,直至擺動完成。關節屈伸主要由周邊肌群作用實現,肌肉通過軸線方向的伸縮來實現關節的運動,其動作方式和直線驅動器相似。所以,本設計采用對稱分布的直線位移驅動器來模擬人體的肌肉,為假肢運動提供助力。
1.2 仿生髖關節設計
假肢關節的設計尺寸與人體髖臼位置、盆骨和截肢剩余組織尺寸有關。本設計原型對象是一名 25 歲的中國男性,身高 170 cm,體重 66 kg,相關參數如表 1 所示,包括坐姿肘關節的高度、坐姿髖關節的寬度和髖關節周長;髖臼相關測量尺寸,如圖 3 所示。由髖臼位置得到 RCM 機構尺寸,其結構簡圖如圖 4 所示,然后使用遺傳算進行優化[14-15],實現 RCM 機構體積的最小化,同時實現對假肢的包裹,消除截肢者穿戴假肢時的心理障礙,提高其接受度[16]。該對象了解實驗內容后簽署知情同意書。本研究方案通過上海健康醫學院醫學倫理委員會的批準。
圖3
髖臼位置測量法
Figure3.
Acetabulum position measuring method
圖4
RCM-HDP 結構簡圖
Figure4.
Structure of RCM-HDP
在實現轉動中心與髖臼重合的基礎上,尺寸參數 b 和 c 限制著 RCM 機構整體尺寸,機構 S 區域的目標函數可以表示為:
|
式中 BC = σ1NJ,CD = σ2CN。該部分的優化目標是使最大積分尺寸 S 小于或等于接受腔 (矢狀面寬度)的一半。根據 RCM 機構尺寸要求和不動點位置,優化函數受以下約束條件約束:
|
其中 表示從髖臼到接受腔底部的高度,定義為:
|
本文利用 MATLAB GA 工具箱進行優化,表 2 列出了優化中使用的參數。
2 模型和仿真
2.1 整體方案
下肢假肢由髖離斷假肢、膝關節假肢和足部假肢組成。本文中髖離斷假肢的設計是在理想化膝關節假肢和足部假肢基礎上開展的,主要由 RCM 機構、并聯驅動器、站立支撐板、扭矩傳感器等組成,其轉動范圍是 ?17° 旋轉到 95°,包括從 ?15° 到 75° 的擺動相位和 90° 的坐姿狀態,表 3 是以式(1)收斂到最小值為目標,經過 200 次迭代優化得到的詳細設計參數。控制方面:首先通過 VICON 設備采集健康人體下肢步態運動學信息并通過多層前饋網絡(back propagation neural network,BP 神經網絡)建立穿戴髖關節假肢患者健康側和假肢側的運動學映射關系;使用九軸姿態傳感器采集人體健康側下肢關節運動學參數(角速度、角加速度等)并進行數據預處理提取步態特征,之后由 BP 神經網絡建立健康側-假肢側的運動學映射關系生成假肢側運動的參考步態相位,結合建立的下肢假肢動力學模型通過比例積分微分控制(proportional integral derivative control,PID 控制)調節兩個直線驅動器運動。據研究表明,髖關節運動中的最大力矩值產生在單腿支撐期,此時下肢各關節的高剛度特性實現對人體的支撐,在髖關節屈曲伸展階段,關節力矩在25 Nm 之間。針對此分析,再結合截肢者偏弱的運動能力等情況,在利用支撐板等結構保證支撐性要求的基礎上,選用 M3508 無刷電機,配合滾珠絲杠和 2 mm 線徑彈簧為關節提供力矩,重量大約在 1 200 g,總功率在 100 W 左右。圖 5 為設計方案的三維模型圖。
圖5
RCM-HDP 三維模型圖
Figure5.
3D model diagram of RCM-HDP
2.2 髖離斷假肢運動仿真分析
使用 SolidWorks 軟件建立簡化的髖離斷假肢樣機模型,將模型保存為 Parasolid 格式的文件并導入 ADAMS 軟件中,對模型的各個零件自定義材料屬性;添加固定副、轉動副等約束,把原本與接受腔固定的零件與大地固定,在驅動連桿作用的轉動副位置添加驅動使得虛擬樣機滿足所需的運動方式。簡化髖離斷假肢模型如圖 6 所示。仿真首先進行驅動設置,使其按照預設的軌跡方式運動[17]。由于假肢控制原理是鏡像健康側下肢的運動參數,控制目標是實現假肢關節運動與截肢者健康側關節運動變化的最大程度對稱,故依據前述實驗所得的人體行走運動中的髖關節力矩變化曲線作為虛擬樣機輸入 STEP 函數驅動的依據,如圖 6 所示,然后把虛擬樣機關節運動副上的 Motion 函數改成 STEP 函數,表 4 為函數參數,最后完成虛擬樣機運動仿真。
圖6
ADAMS 中簡化的髖離斷假肢模型和驅動力矩曲線
Figure6.
The simplified hip prosthesis model in ADAMS and driving moment curve
3 結果和討論
在 ADAMS 中設置仿真時間及仿真步長進行仿真,進入 ADAMS/Postprocessor 模塊,仿真完成后得到一個步態周期內髖關節角度變化數據,經 MATLAB 處理得到仿真輸出和健康下肢的髖關節角度-力矩變化曲線和不同速度下的髖關節角度變化曲線,見圖 7。
圖7
髖離斷假肢運動仿真輸出曲線
Figure7.
Simulation output curve of joint motion of hip prosthesis
經過上述相同操作步驟,對模型施加 0.4、0.6、0.8 m/s 三種步速下的關節驅動力矩,得到一個步態周期內髖關節角度-時間變化數據,處理得到仿真輸出和健康下肢的髖關節角度-時間變化曲線,如圖 8 中所示三種步速下的變化曲線,以及實驗過程中采集截肢者健康側下肢運動步態參數示意圖。
圖8
不同步速下髖關節角度變化曲線
Figure8.
Angular change curves of hip joint under asynchronous velocity
為量化分析步態參數對稱性,根據下肢兩側運動參數使用對稱性分析指標[18],公式如下:
|
公式中 和 分別代表左右側肢體的步態參數,本文中, 代表模型或 7E7(Ottobock)假肢步態參數, 代表健康下肢的步態參數。在公式(4)中,=1 表示兩側運動數據完全對稱,結果中正負號表示位置側的主導地位。為驗證設計方案的假肢與健康側下肢運動的對稱性,采用步態運動特征參數如步幅、最小髖關節角度[19],對稱性量化結果如表 5 所示。
根據表 5 分析,針對步幅的對稱性指標, 由原來的 50% 提高到 97%,最小髖關節角度由 5% 提高到 83%。設計模型與傳統假肢 7E7 相比在對稱性方面有了一定提高。觀察圖 7 可以發現,兩條曲線的變化趨勢基本相似,關節力矩變化在正常范圍以內;但是,與健康下肢運動情況相比,曲線階段 1 出現了間斷,階段 3、階段 4 出現了跳躍,階段 1 中關節力矩變化快于正常變化情況。觀察圖 8 可以發現,隨著速度的增加,髖關節模型的伸展角度逐漸變小,符合正常行走步態特征;而髖關節模型在不同速度下的伸展角度比正常屈曲角度大,伸展角度也會因為速度的不同而出現一定的偏差;總體分析可知,與傳統髖離斷假肢(7E7)相對比,基于 RCM 機構的髖離斷假肢通過還原假肢關節的轉動中心、復原人體生理結構后,步態對稱性有了明顯提高。而出現偏差的主要原因是利用處理過的運動數據建立驅動函數與真實情況存在的誤差,而且樣機模型只是髖關節模型,沒有構建完整的下肢模型,其剛度、裝配等也存在誤差,因此造成了仿真輸出曲線與理想曲線之間的差異。
在之前的應用研究中,Radcliffe 指出,加拿大型髖離斷假肢置于盆骨下前位置的單軸鉸鏈安裝方式,影響了假肢運動能力,而且現有同類型假肢大部分保留了這種設計方式。真正探究這種安裝方式異常帶來問題的,只有同濟大學的張振龍和日本的 Naito 教授,前者提出單自由度空間機構設計假肢髖關節的方案,并對其矢狀面內軌跡做了研究,但只停留在公式計算的理論層面;后者提出外骨骼式假肢髖關節,通過將假肢安裝在盆骨側面實現圍繞髖臼旋轉。從實驗結果來看,假肢的性能有了一定程度提升,但側邊安裝的設計會造成支撐不足的問題,給使用安全帶來巨大隱患;同時,使用時異常的外部形狀也會影響接受度,這都制約了其應用和發展。本設計則是在綜合前人研究的基礎上,以還原人體生理結構為目標,以 RCM 機構為設計原型,利用優化算法和計算機仿真軟件驗證思路的科學性、可行性。其中,多目標優化是機構設計的重要環節,尤其是平行四桿機構,Li 等[20]利用全局條件指數在一定范圍內對滿足體積約束的微創手術機器人進行了優化,通過與全局條件指數結果的對比,驗證了有效性。本設計利用遺傳算法進行尺寸優化,更加簡單地控制了假肢的整體尺寸,實現衣物對假肢的包裹。
從仿真結果分析可知,本設計方案具有一定的可行性和科學性,對髖離斷假肢的發展具有積極作用,但未來開展實際應用還需要作深入探索,特別是在如下方面:① 整體體積和重量的控制,假肢體積與外觀之間有緊密關系,實際應用中需要著重考慮減小假肢體積,便于穿戴和包裹美化,有利于提高使用者對假肢的接受度;② 電機選型,小體積、高性能的電機可以更好地控制假肢體積和能量的消耗,在實際工作中還需要針對性設計驅動方案和電機型號,以便更好地提升假肢性能;③ 驅動機構協調控制,基于關節剛度為目標的控制策略,對于協調驅動電機的變化速度、距離等方面有著較為嚴格的要求,還需要進一步探索。
4 結論
針對傳統髖離斷假肢兩大問題:轉動中心與健康側髖關節大轉子位置不對稱,從而導致穿戴者行走步態畸形,以及純機械被動式設計消耗能量較大,本文設計了一種基于 RCM 機構的動力髖離斷假肢。利用遺傳算法優化整體結構尺寸,配合設計了仿生并聯彈性驅動器為假肢提供助力,在建立的 SolidWorks、ADAMS 虛擬樣機聯合仿真,初步驗證了該設計的可行性。結果顯示,與傳統假肢相比,所設計的基于 RCM 的假肢能夠提高行走步態的對稱性,對于改善穿戴者行走步態具有積極作用。
致謝:我們誠摯地感激河南孫有志、上海云耀蛟和上海假肢廠有限公司呂永兵,在研究中孫有志先生和云耀蛟先生讓我們了解到髖離斷截肢者的行走習慣和假肢穿戴反饋等,呂永兵總經理在假肢的結構設計和對線等調整方面提供了寶貴的建議。
利益沖突聲明:本文全體作者均聲明不存在利益沖突。