為研究不同波長的光對鯉魚機器人運動行為的影響,本研究對鯉魚機器人進行趨光性實驗、解剖實驗、光控實驗和測速實驗。分別選用藍、綠、黃、紅四種不同波長的光對鯉魚進行趨光性實驗,觀察其運動行為。通過解剖鯉魚顱骨確定光控裝置的適宜搭載位點,并自主研制一種適用于任何光照強度環境的光控搭載裝置。對鯉魚機器人進行光控實驗,利用計算機雙目立體視覺技術對鯉魚機器人運動行為檢測,應用核相關濾波算法(KCF)跟蹤鯉魚機器人并獲取其運動軌跡,根據其運動軌跡計算不同波長光控制下的鯉魚機器人運動速度。結果顯示,鯉魚對光由強到弱的敏感性依次為藍、紅、黃、綠,不同波長的光控制鯉魚機器人的速度具有一定規律可循。本研究可為鯉魚機器人控制提供一種避免腦損傷的新方法。
引用本文: 彭勇, 趙洋, 張乾, 鮑志勇, 劉曉月, 張慧, 劉佳寧, 問育棟. 不同波長的光對鯉魚機器人運動行為影響的研究. 生物醫學工程學雜志, 2021, 38(4): 647-654. doi: 10.7507/1001-5515.202012078 復制
版權信息: ?四川大學華西醫院華西期刊社《生物醫學工程學雜志》版權所有,未經授權不得轉載、改編
引言
生物機器人是人類通過生物控制技術施加干預信號調控生物行為從而實現人類操控的生物[1]。水生動物機器人在運動靈活性、環境適應性和自身隱蔽性比仿生機器人更具有突出優勢。在環境監測、水上救援、跟蹤偵察和海洋維權等方面具有重要的特殊應用價值,已成為備受國內外關注的新興前沿高科技領域。美國的科研人員在國防部高級研究計劃局(defense advance research project agency,DARPA)資助下發明了一種神經探針,將神經探針植入鯊魚腦內對鯊魚中樞神經系統進行刺激可遠程控制鯊魚的運動行為,將鯊魚變成動物機器人完成間諜任務[2]。俄羅斯生物學家在海龜腦部植入電極,通過電刺激信號遙控海龜機器人爬行[3]。以色列內蓋夫本—古里安大學研究了一種無線信號采集系統記錄金魚的神經元電信號,為研究金魚機器人的控制機制奠定了基礎[4]。新加坡南洋理工大學將微型電子設備連接到甲蟲背部,通過對單個肌肉的電刺激,控制甲蟲飛行并轉彎[5]。日本廣島大學通過刺激金魚的中腦內側縱束核(nucleus of the medial longitudinal fasciculus,Nflm),實現了控制金魚的前進和轉向[6]。浙江大學通過對大鼠顱內皮層微電極刺激,把無線微刺激器搭載在大鼠背部,利用藍牙將電刺激信號通過植入的微電極傳遞到大鼠機器人的腦部,從而控制大鼠前進和轉向[7-9]。重慶大學將超聲波刺激源、表皮電極刺激和光輔助刺激相結合,在無創條件下成功控制了大鼠的基本運動[10]。南京航空航天大學電刺激壁虎中腦的不同腦區誘導壁虎轉向,實現立體空間的無障礙運動[11-12]。山東科技大學通過向家鴿腦部植入微電極,采用微電極刺激禽類特定的膠體間核,控制家鴿起飛、轉彎、前進和后退等動作行為[13-14]。燕山大學通過向鯉魚腦運動區植入腦電極成功控制鯉魚機器人水下運動[15]。
當今國際上對動物機器人的控制方法主要以電刺激方式為主,向動物腦運動區植入微電極,通過電刺激從而控制動物機器人的運動行為。但人工將微電極植入動物腦組織內可引起腦組織出血、水腫和炎癥等腦損傷現象。向動物腦運動區植入微電極時還需精確掌握植入位點,若微電極植入位置出現偏差,也可能導致實驗動物控制無效或喪失運動能力,甚至死亡。對此,尋找新的控制方法來解決這些問題是具有重要的應用價值和研究意義的。到目前為止,有關光對水生動物機器人運動控制影響的研究尚屬空白。
計算機雙目立體視覺是機器視覺的一種重要形式,是基于視差原理并利用成像設備從不同位置獲取被測物體的兩幅圖像,通過計算圖像對應點間的位置偏差,來獲取物體三維幾何信息的方法。由于此種測量系統結構簡單,而且精度和效率都較高,故可應用雙目立體攝像頭獲取鯉魚機器人的三維運動軌跡,將三維運動軌跡坐標應用于鯉魚機器人的測速。
為了開展不同波長的光對水生動物機器人運動行為影響的研究,本文以鯉魚為研究對象,在前期適用于鯉魚機器人光刺激裝置及光控實驗方法的研究基礎上[1],按照波長由小到大的順序將藍、綠、黃、紅不同波長光對鯉魚機器人進行趨光性實驗、光控實驗、測速實驗,采用計算機雙目立體視覺技術對鯉魚機器人運動行為的影響進行檢測與研究,以期發現不同波長的光對鯉魚機器人運動速度控制的規律。
1 材料和方法
1.1 材料與儀器
發光二極管(light-emitting diode,LED)(5 mm,廣東深圳科比微半導體有限公司,中國);生理藥理電子刺激儀(YLS-9A,北京眾實迪創科技發展有限責任公司,中國);自主研制的雙層多通道立體水迷宮[16];華瑞電動磨具(F013020058 FZ-10,上海豪海設備有限公司,中國);丁香酚水門汀(201504,上海榮祥齒科材料有限公司,中國);自主研制的光控裝置;雙目立體視覺攝像模塊(HNY-CV-001,武漢萊娜機器視覺科技有限公司,中國);商業數學軟件 MATLAB R2018a 軟件(MathWorks 公司,美國);統計分析軟件 SPSS22.0(IBM 公司,美國)。
1.2 實驗動物
健康成年鯉魚 40 尾,體重(1.05 ± 0.15)kg,體長(33.50 ± 1.50)cm,購于河北省秦皇島市興龍廣緣商業連鎖有限公司。
1.3 鯉魚的趨光性實驗
按照藍、綠、黃、紅不同波長的光將 40 尾實驗鯉魚隨機分為 4 組,每組 10 尾。選擇藍、綠、黃、紅四種不同波長(455~780 nm)LED 作為趨光性實驗的光源,將 LED 用防水膠固定在自主研制的雙層多通道立體水迷宮[16]下層通道的上沿。先將鯉魚放入水迷宮內,點亮水迷宮左側的 LED,水迷宮右側無光,觀察 LED 對鯉魚運動行為的影響。關閉光源 5 min,避免鯉魚對 LED 光源產生適應性;再點亮水迷宮右側的 LED,水迷宮左側無光,觀察 LED 對鯉魚運動行為的影響。每種波長的 LED 在水迷宮左、右兩側各進行 3 次鯉魚趨光性實驗。
1.4 鯉魚機器人光控裝置搭載位點的確定
鯉魚屬于硬骨魚,其顱骨結構的研究可為光控裝置植入顱骨時的搭載位點及鉆孔深度提供依據。首先對鯉魚進行開顱手術,打開顱腔找到兩根細長的嗅莖,發現嗅莖上方空間存在較多的脂肪組織和腦脊液而沒有腦組織,將脂肪組織和腦脊液清除,用紅色和紫色兩根手術縫合線分別在兩條嗅莖下穿線并將其挑起,如圖 1 所示。對體重 1 kg 鯉魚不同位置的顱骨斷面進行測量,端腦上方的顱骨厚度為 1.05 mm,中腦上方的顱骨厚度為 2.50 mm,小腦上方的顱骨厚度為 3.12 mm。由于兩根細長的嗅莖上方空間沒有腦組織,此處顱骨較薄,既容易將緊固螺釘植入顱骨內,也不會對腦組織造成機械損傷,故選擇嗅莖上方,在顱骨表面上的額骨后沿 10 mm 處作為光控裝置緊固螺釘的植入位點。在鯉魚顱骨表面上的 1、2 處植入緊固螺釘固定光控裝置,如圖 2 所示。
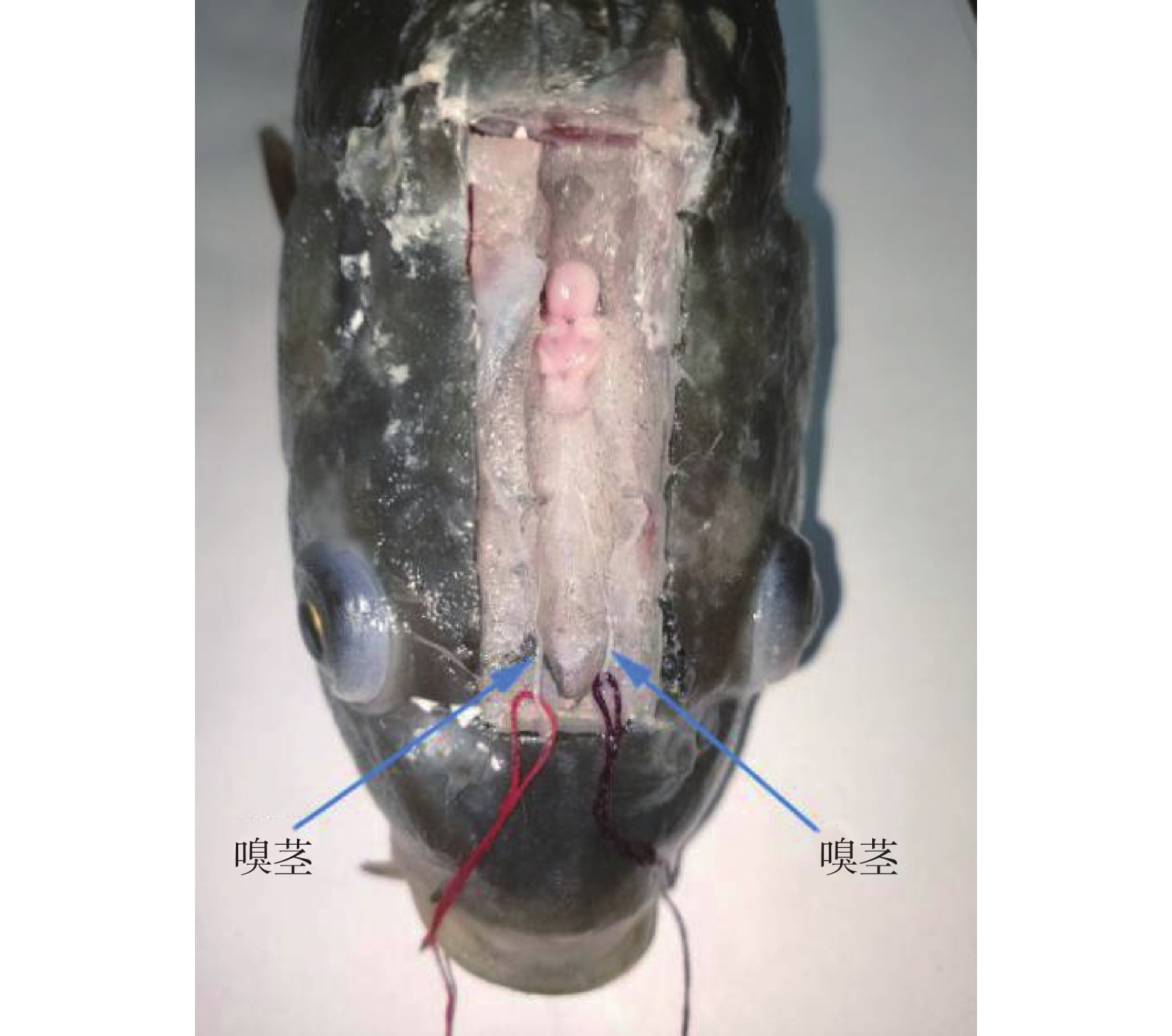 圖1
鯉魚嗅莖
Figure1.
Carp sniffing stem
圖1
鯉魚嗅莖
Figure1.
Carp sniffing stem
 圖2
緊固螺釘在顱骨表面的植入位點
Figure2.
The implantation site of the fastening screw on the surface of the skull
圖2
緊固螺釘在顱骨表面的植入位點
Figure2.
The implantation site of the fastening screw on the surface of the skull
1.5 鯉魚機器人光控裝置的研制
為使光控鯉魚機器人實驗在有光和無光條件下皆可進行操作,自主研制了一種適用于在任何光照強度環境中都能控制鯉魚機器人水下運動的光控裝置及實施方法。本裝置由搭載板、遮光帶、魚鰭固定帶、跳線板、不同波長的 LED 和導線組成,如圖 3 和圖 4 所示。其中“王”字型的搭載板為裝置主體;遮光帶縫合在搭載板上呈拱橋狀以便更貼合眼部,為其遮擋外界光源以避免外界光源干擾;兩條魚鰭固定帶與搭載板的兩側相連形成交叉點縫合在搭載板上;在遮光帶內外兩側的搭載板上每條支路處焊接成對的跳線板,同一支路的內排光源與外排光源為串聯結構,各個支路光源為并聯結構,每種波長的 LED 可單獨對鯉魚機器人進行光控實驗。光控裝置呈“王”字型結構,內外有兩排 LED 光源,內排光源位于遮光帶內部用來刺激眼睛,外排光源位于遮光帶外部起到提示作用。本發明可為將來水生動物機器人的光控研究與應用提供一種全新的裝置及方法,已獲國家發明專利(ZL201911048995.8)[17]。
 圖3
“王”字型搭載板與魚鰭固定帶連接示意圖
Figure3.
Schematic diagram of connection between “Wang” shaped carrying plate and fin fixing belt
圖3
“王”字型搭載板與魚鰭固定帶連接示意圖
Figure3.
Schematic diagram of connection between “Wang” shaped carrying plate and fin fixing belt
 圖4
光控裝置搭載在鯉魚機器人的示意圖
Figure4.
Schematic diagram of light stimulation device mounted on a carp robot
圖4
光控裝置搭載在鯉魚機器人的示意圖
Figure4.
Schematic diagram of light stimulation device mounted on a carp robot
1.6 鯉魚機器人的光控實驗
按照藍、綠、黃、紅四種不同波長的光將實驗鯉魚 40 尾隨機分為 4 組,每組 10 尾。將實驗鯉魚置于丁香酚溶液中進行藥浴麻醉。選擇藍、綠、黃、紅四種不同波長(455~780 nm)LED 作為光控的光源,將光控裝置固定搭載在鯉魚嗅莖上方的顱骨上。將搭載光控裝置的鯉魚機器人放入實驗水池中的立體水迷宮內,用 LED 刺激鯉魚左眼,右眼無 LED 刺激,觀察 LED 對鯉魚機器人運動行為的影響;關閉光源 5 min,避免鯉魚對 LED 光源產生適應性,再用 LED 刺激鯉魚右眼,左眼無 LED 刺激,觀察 LED 對鯉魚運動行為的影響。每種波長的 LED 進行實驗 40 次,同種光源刺激左眼、右眼分別各 20 次。光控實驗的參數:電壓 3 V,電流 20 mA,波寬 0.05~60.00 ms,刺激持續時間 30 s,光照亮度 16 000~18 000 mcd,方波輸出類型為連續波。采用定基線雙目立體攝像頭,左、右兩個相機分別對重疊視場中的光源目標進行采集圖像,再利用左、右圖像視差計算鯉魚機器人的目標位置,判斷鯉魚機器人的光控效果。由于跟蹤目標為 LED 光源,暗光條件下為深色背景及目標顏色相對單一,使用核相關濾波算法(kernel correlation filter,KCF)對鯉魚機器人進行跟蹤,獲取鯉魚機器人光控實驗的視頻,并進行運動軌跡的識別與提取。
1.7 光控鯉魚機器人的測速實驗
鯉魚機器人是非剛性運動目標。本課題對 LED 光源目標進行識別,進行左右圖像匹配,提取鯉魚機器人的像素坐標,根據匹配像對和已標定的系統參數獲得鯉魚機器人的三維空間坐標,計算鯉魚機器人的運動行為參數:距離(S)、平均速度(v),如式(1)、(2)所示:
 |
 |
其中,(X1,Y1,Z1)和(X2,Y2,Z2)分別為單位時間內運動起點和終點坐標。
此時速度是一個向量,如果忽略方向,將其作為一個標量僅表示鯉魚機器人受到光控時運動速度的大小,并以此標量作為衡量鯉魚機器人在不同波長光控時影響運動行為的一個重要指標。
應用統計學軟件 SPSS22.0 對不同波長光源下鯉魚機器人運動速度數據進行處理,將不同波長的光分為藍光組、綠光組、黃光組、紅光組 4 組,用平均數 ± 標準差形式表示光控鯉魚機器人的運動速度,利用單因素方差分析(one way anova,OWA)方法,兩組間比較采用獨立樣本 t 檢驗,P < 0.05 為差異具有統計學意義。
2 結果
2.1 鯉魚的趨光性實驗
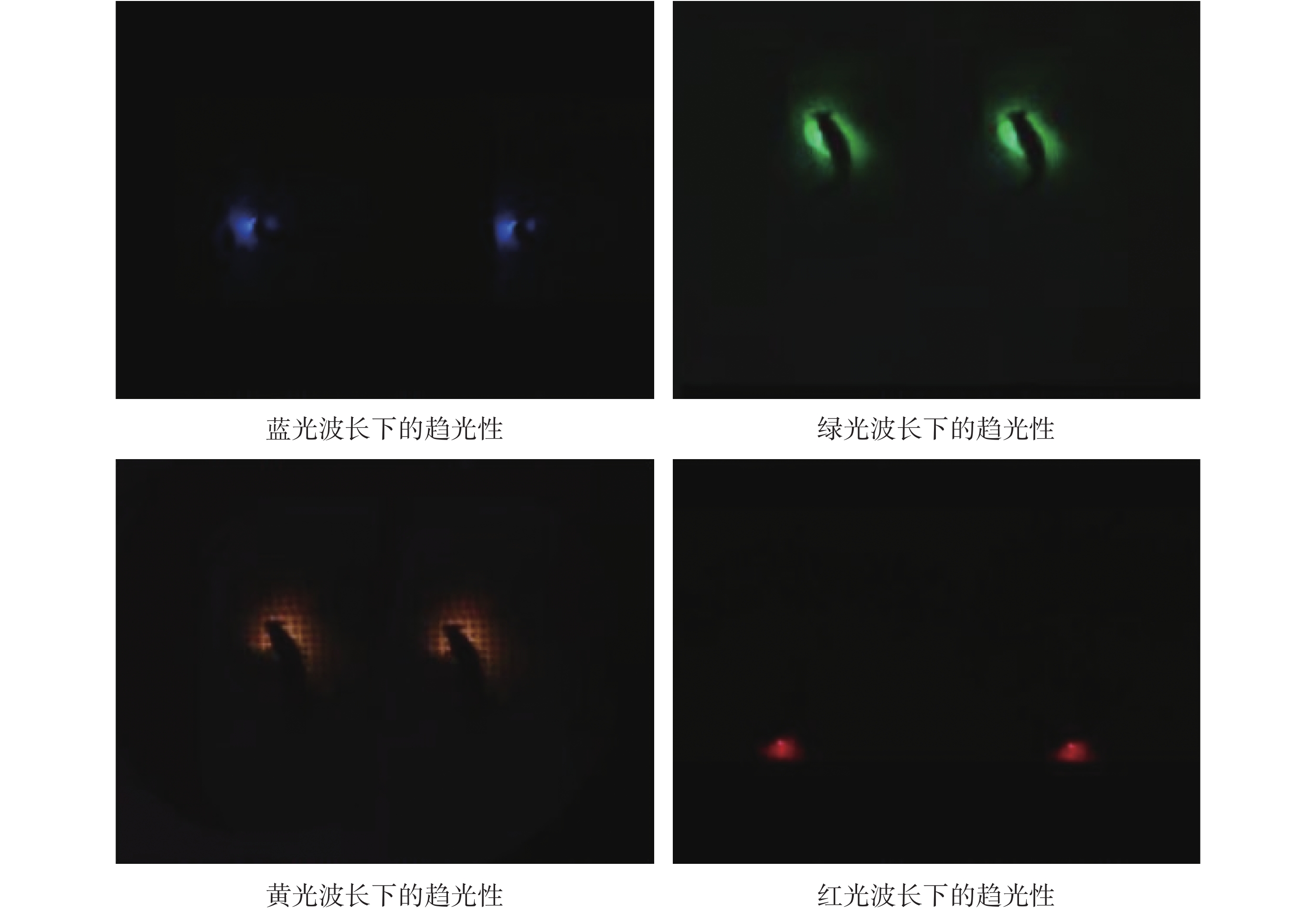
鯉魚的趨光性實驗顯示,鯉魚(n = 40)在藍、綠、黃、紅四種不同波長光的光照條件下均躲避 LED 光源向暗處游動,皆表現出避光性即負性趨光性。但不同波長的光源下表現出的程度不同,其中鯉魚對藍光波長(455~470 nm)的表現最強烈,其次是紅光波長(622~780 nm)、黃光波長(577~597 nm)、綠光波長(492~577 nm)。如圖 5 所示,利用雙目立體攝像頭記錄鯉魚的負性趨光性現象;對鯉魚在不同波長光源下的負性趨光性進行了數據統計,如表 1 所示。
 圖5
不同波長光下的鯉魚趨光性
Figure5.
Phototaxis of carp robots under light with different wavelengths
圖5
不同波長光下的鯉魚趨光性
Figure5.
Phototaxis of carp robots under light with different wavelengths
2.2 鯉魚機器人的光控實驗
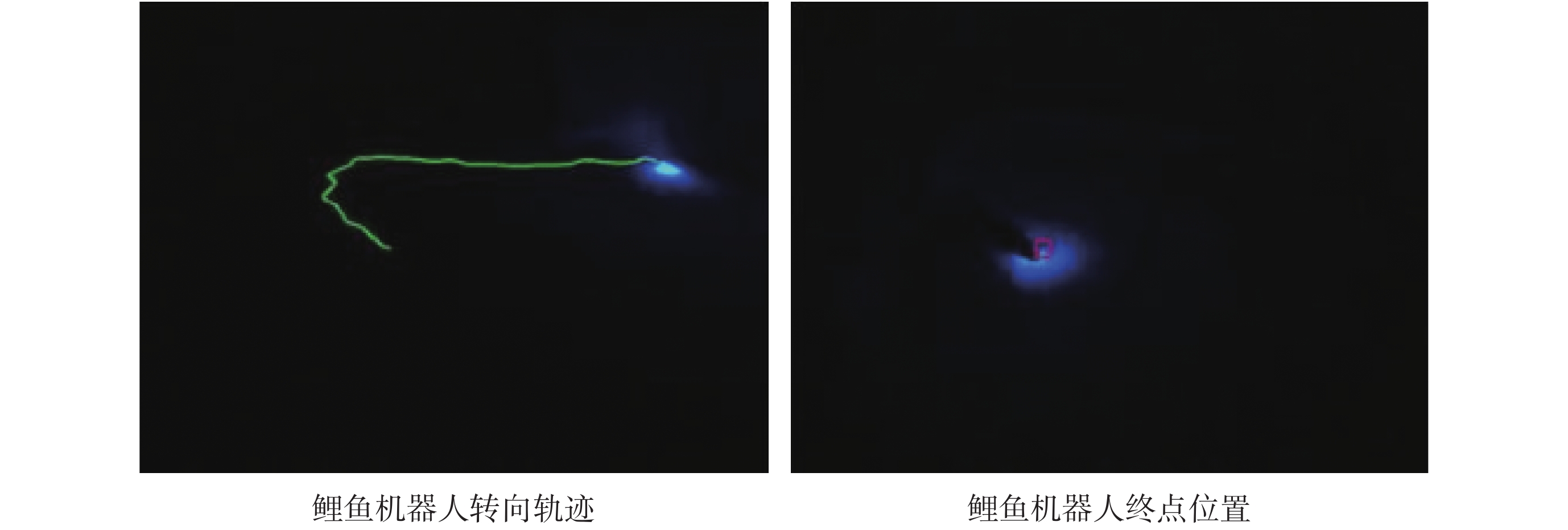
鯉魚機器人運動行為的光控作用,本文以藍色波長(455~470 nm)的光控實驗為例。如圖 6 所示,綠色曲線為鯉魚機器人轉向的運動軌跡,成功光控鯉魚機器人左、右轉向運動,左轉成功率為 57.5%,右轉成功率 52.5%,藍色波長光控效果成功率最高。
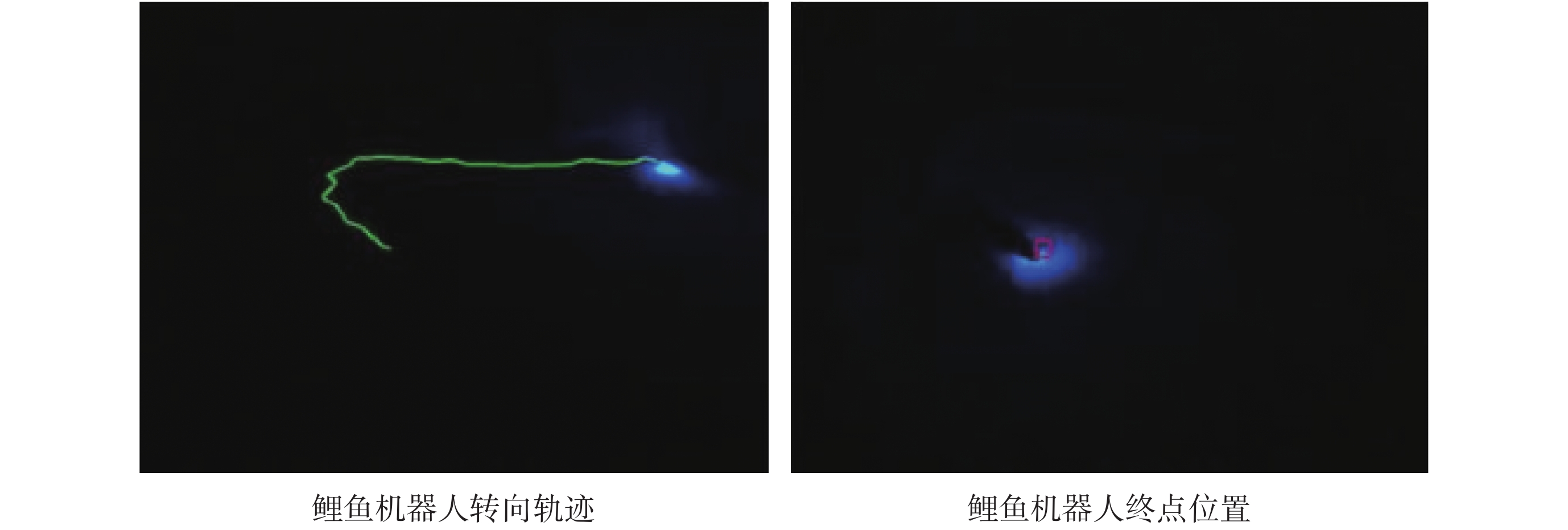 圖6
藍色波長的光控制鯉魚機器人的轉向軌跡
Figure6.
Steering trajectory of a carp robot controlled by blue light
圖6
藍色波長的光控制鯉魚機器人的轉向軌跡
Figure6.
Steering trajectory of a carp robot controlled by blue light
2.3 鯉魚機器人的測速實驗
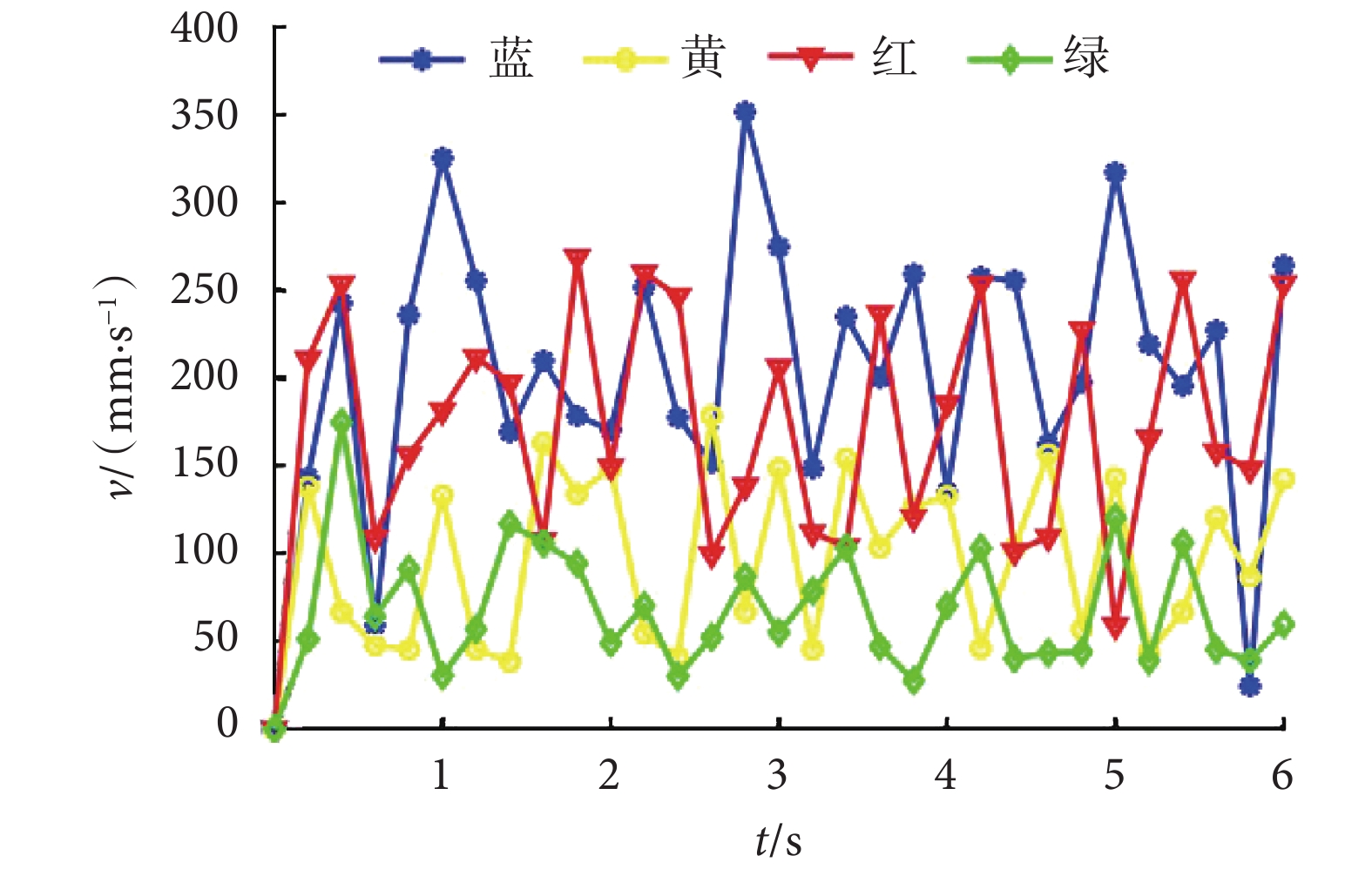
在相同時間內,光控的鯉魚機器人運動距離按照波長從大到小的順序依次為藍光、紅光、黃光、綠光。光控鯉魚機器人 30 s 內其運動速度會發生明顯變化,選取 6 s 內鯉魚機器人的運動速度,光控 1.2 s 后達到第一個峰值,連續波持續刺激第 3 s 后速度達到 350 mm/s。光控的鯉魚機器人會產生明顯反應,運動速度突增的最大值在 30 s 內。不同波長的光控制鯉魚機器人的運動速度,如圖 7 所示,藍、綠、黃、紅不同的顏色的折線分別代表相應波長的光控制速度。
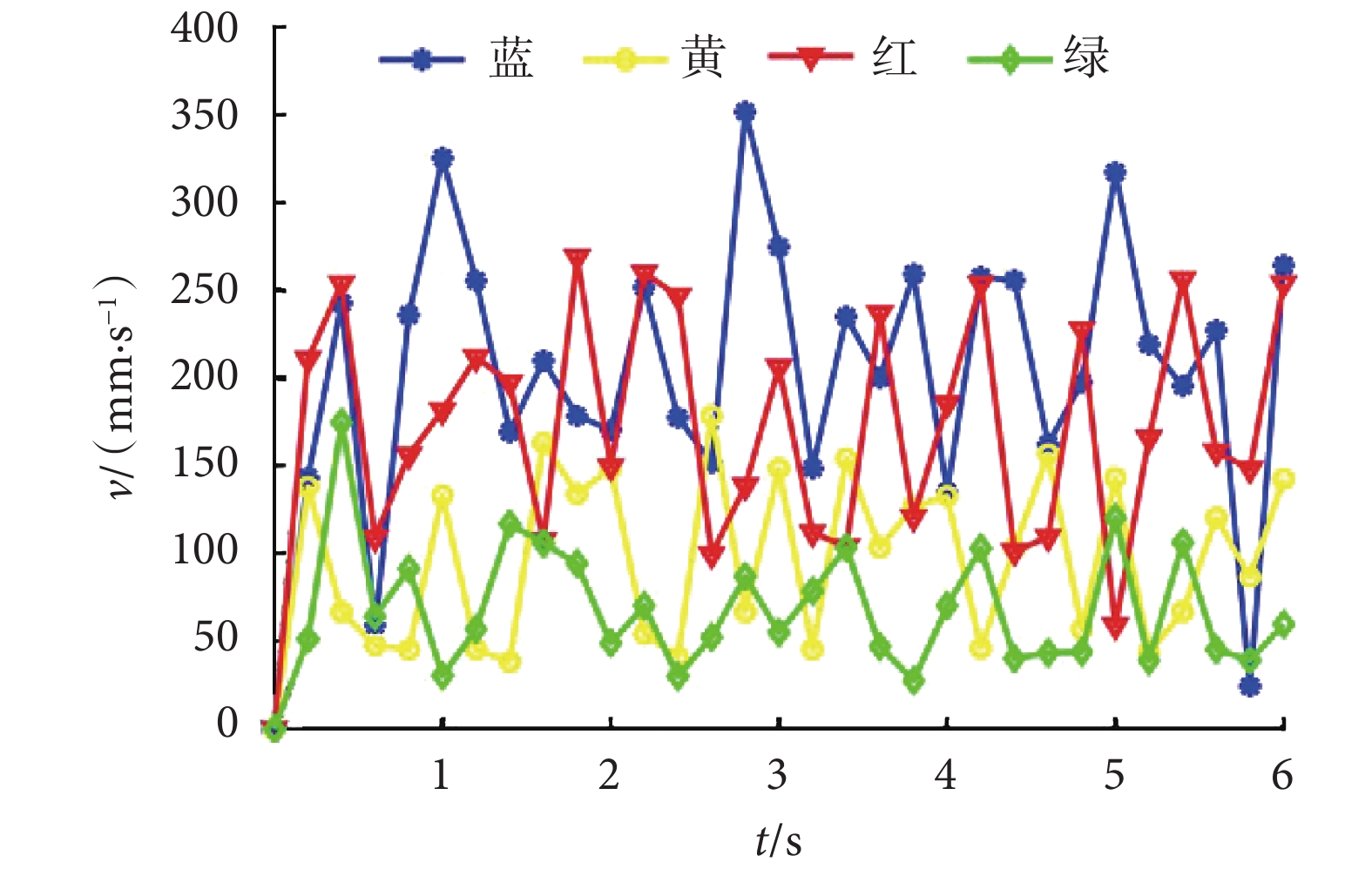 圖7
不同波長的光控制鯉魚機器人的運動速度
Figure7.
Motion velocity of carp robots controlled by different wavelengths light
圖7
不同波長的光控制鯉魚機器人的運動速度
Figure7.
Motion velocity of carp robots controlled by different wavelengths light
為避免光控實驗的偶然性,本研究選取并采集 40 尾鯉魚機器人的光控運動參數,利用統計分析軟件 SPSS22.0 對實驗數據統計分析,如表 2 所示。結果顯示,鯉魚機器人在受到藍光光控時運動速度最快。
 ,n = 40)
Table2.
Motion velocity of carp robots under light with different wavelengths (
,n = 40)
Table2.
Motion velocity of carp robots under light with different wavelengths ( ,n = 40)
,n = 40)
3 討論
生物機器人現已成為 21 世紀一個嶄新的前沿高科技領域,其中就包括了可利用生物自身體內的生物神經電信號支配其運動行為的研究[18]。目前國內外利用無線信號采集系統記錄并解碼生物的神經電信號[4],模擬生物體內的生物電信號,再通過腦—機接口技術對生物進行電刺激,從而實現對生物運動行為的控制,如大鼠機器人[19]、壁虎機器人[20]、家鴿機器人[21]等都是通過在腦運動區施加電刺激信號來控制生物運動行為的。然而向腦運動區施加電刺激信號往往是通過腦電極的植入來實現的,腦電極的植入可導致一定程度的腦組織損傷。為了減輕甚至避免對動物造成腦損傷效應,還需研究新的控制方法,尋找一種既能避免腦損傷又能控制動物運動的方法。
在光控生物機器人研究方面,重慶大學課題組設計了一種控制大鼠機器人的系統,分別以超聲波刺激大鼠聽覺神經、表皮電刺激大鼠痛覺神經和 LED 光刺激大鼠視覺神經三種刺激方式來控制大鼠機器人前進和左右轉彎等運動行為,其中應用 LED 光刺激模擬“虛擬”危險光源,大鼠會朝 LED 相反的方向運動[10]。韓國高等科學技術研究院聯合新加坡信息通信研究所研究了一種全新的生物機器人,研究團隊發現爬行動物海龜能感知一定波長范圍的可見光,將光控模塊、控制模塊、獎勵模塊三個模塊安裝在海龜外殼上,光源控制海龜游向航路點到達指定區域后可獲取獎勵模塊提供的食物[22]。本文是在前期工作基礎上開展的進一步研究[1],即采用光控方法可以控制生物機器人的運動,上述研究方法均表明光控方法不僅可行,也具有一定使用價值,是一種新穎的生物控制方法。本課題在前期光控鯉魚機器人研究工作基礎上繼續探索,研究鯉魚對藍、紅、黃、綠色四種不同波長光的趨光性,并進一步從光對鯉魚機器人運動速度影響的角度來揭示藍、紅、黃、綠光四種不同波長光控制鯉魚機器人運動能力的規律。
本研究進行了鯉魚的趨光性實驗,通過實驗發現鯉魚(n = 40)在藍、綠、黃、紅四種不同波長光的光照條件下均躲避光源向暗處游動,皆表現出避光性即負性趨光性。但不同波長的光源下表現負性趨光性的程度不同,其中鯉魚對藍光波長(455~470 nm)的負性趨光性表現最強烈,躲避光源時轉向角度最大,其次是紅光波長(622~780 nm)、黃光波長(577~597 nm)、綠光波長(492~577 nm)。利用雙目立體攝像頭記錄鯉魚的負性趨光性現象,如圖 5 所示;對鯉魚在不同波長光源下的趨光性進行了數據統計,鯉魚負性趨光性的程度從大到小的順序依次為藍光、紅光、黃光、綠光,如表 1 所示。鯉魚趨光性的發現和負性趨光性規律的揭示,為鯉魚機器人光控的研究與應用提供了依據,也為鯉魚機器人光控的研究與應用奠定了基礎,具有重要的科學意義和實用價值。由于本實驗的樣本量還有限,加之趨光性實驗也受到多種因素的影響,所以鯉魚對藍光、紅光、黃光、綠光的負性趨光性規律還有待于進一步的實驗驗證。但鯉魚對不同波長光的反應是不一樣的,這種實驗現象是客觀存在的,對光控生物機器人是具有啟發和指導意義的。
由于外界光照強度是不斷變化的,對光控動物機器人也會產生一定影響。所以為了能夠在任何光照強度環境中都能有效對鯉魚機器人水下運動進行控制,本研究發明了一種光控搭載裝置及方法,如圖 3 和圖 4 所示,解決了以往光控實驗只能在暗光或無光條件下才能進行控制的問題。而如何將光控裝置搭載在鯉魚頭部,需要尋找光控裝置緊固螺釘的適宜植入位點,為此本研究進行了鯉魚顱骨解剖實驗。對鯉魚進行開顱手術,打開顱腔發現與腦相連的兩根細長的嗅莖上方空間存在較多的脂肪組織和腦脊液,而無腦組織,如圖 1 所示。由于兩根細長的嗅莖上方空間沒有腦組織,故選擇嗅莖上方的顱骨作為光控裝置緊固螺釘的適宜植入位點,如圖 2 所示。本研究還進一步對體重 1 kg 鯉魚不同位置的顱骨斷面進行測量,結果也顯示嗅莖上方的顱骨厚度較薄,故既比較容易將緊固螺釘植入顱骨內,又不會對腦組織造成機械損傷。通過解剖實驗,本研究獲得的鯉魚顱骨結構與特征與秉志[23]的學術專著闡述內容基本一致,表明在鯉魚嗅莖上方的顱骨處固定搭載光控裝置是可行的。
本研究依據鯉魚具有負性趨光性的原理,再結合本課題的趨光性實驗,對鯉魚機器人進行了光控實驗。本文以效果相對明顯的藍色光控實驗為例,如圖 6 所示,綠色曲線為鯉魚機器人轉向的運動軌跡,成功光控鯉魚機器人左、右轉向的運動,左轉成功率為 57.5%,右轉成功率為 52.5%,藍光波長(455~470 nm)的光控效果成功率最高。本研究采用光控方法,初步實現了對鯉魚機器人轉向運動的控制。由于可能受到 LED 的電學特性、光學特性以及環境噪聲等因素的影響,實驗成功率仍有待于進一步提升,本課題組將在今后研究工作中繼續探索更加適宜的實驗條件。
本研究選用藍、綠、黃、紅四種 LED 作為刺激光源,由于藍、綠、黃、紅 LED 的波長各不相同,鯉魚機器人光控實驗時其運動行為也不盡相同。對此,本研究進行了光控鯉魚機器人的測速實驗,鯉魚機器人在受不同波長的光控制時其運動速度不同,如圖 7 所示。結果表明,鯉魚機器人受到不同波長的光控制時其運動速度是不同的,從大到小的順序依次為藍、紅、黃、綠,如表 2 所示,此結果與鯉魚的趨光性實驗結果相同,由此進一步驗證了鯉魚的趨光性實驗結果。本研究表明,鯉魚機器人的光控方法具有可行性。但至今鯉魚機器人的光控機制尚不十分清楚,有待于進一步從視覺器官及視覺中樞等方面進行更深入的研究。
應用光控技術控制生物機器人是一個新穎的控制方法,具有重要的科學研究意義與潛在的實際應用價值。開展光控水生動物機器人運動行為的科學研究是一項探索性工作,在生物控制領域,尋找一種既能夠控制生物機器人又可減輕或避免腦組織損傷的有效控制方法是當前研究的一個重要課題。
4 結論
為研究不同波長的光對鯉魚機器人運動行為的影響,本研究對鯉魚機器人進行了鯉魚趨光性實驗、鯉魚顱骨解剖實驗、鯉魚機器人光控實驗和測速實驗。發現了鯉魚具有負性趨光性,由強到弱的程度依次為藍光、紅光、黃光、綠光。通過鯉魚顱骨解剖實驗,確定光控裝置的搭載適宜位點為鯉魚嗅莖上方的顱骨。發明了一種適用于任何光照強度環境中的光控裝置及方法,突破了以往光控只能在暗光或無光條件下才能應用的限制,使光控生物機器人能夠在任何光照度環境中實際應用成為可能。對鯉魚機器人進行光控實驗,左轉成功率為 57.5%,右轉成功率為 52.5%;利用計算機雙目立體視覺技術對鯉魚機器人運動行為檢測,應用 KCF 算法跟蹤鯉魚機器人并獲取其運動軌跡;根據其運動軌跡計算不同波長光控制下的鯉魚機器人運動速度。結果表明,鯉魚機器人受到不同波長的光控制時其運動速度是不同的,從大到小的順序依次為藍光、紅光、黃光、綠光,初步揭示了不同波長的光控制鯉魚機器人運動速度的規律。本研究初步實現了應用不同波長的光控制鯉魚機器人的運動行為,提供了一種可避免腦損傷的鯉魚機器人控制新方法,為光控生物機器人的研究與應用奠定了一定基礎。
利益沖突聲明:本文全體作者均聲明不存在利益沖突。
引言
生物機器人是人類通過生物控制技術施加干預信號調控生物行為從而實現人類操控的生物[1]。水生動物機器人在運動靈活性、環境適應性和自身隱蔽性比仿生機器人更具有突出優勢。在環境監測、水上救援、跟蹤偵察和海洋維權等方面具有重要的特殊應用價值,已成為備受國內外關注的新興前沿高科技領域。美國的科研人員在國防部高級研究計劃局(defense advance research project agency,DARPA)資助下發明了一種神經探針,將神經探針植入鯊魚腦內對鯊魚中樞神經系統進行刺激可遠程控制鯊魚的運動行為,將鯊魚變成動物機器人完成間諜任務[2]。俄羅斯生物學家在海龜腦部植入電極,通過電刺激信號遙控海龜機器人爬行[3]。以色列內蓋夫本—古里安大學研究了一種無線信號采集系統記錄金魚的神經元電信號,為研究金魚機器人的控制機制奠定了基礎[4]。新加坡南洋理工大學將微型電子設備連接到甲蟲背部,通過對單個肌肉的電刺激,控制甲蟲飛行并轉彎[5]。日本廣島大學通過刺激金魚的中腦內側縱束核(nucleus of the medial longitudinal fasciculus,Nflm),實現了控制金魚的前進和轉向[6]。浙江大學通過對大鼠顱內皮層微電極刺激,把無線微刺激器搭載在大鼠背部,利用藍牙將電刺激信號通過植入的微電極傳遞到大鼠機器人的腦部,從而控制大鼠前進和轉向[7-9]。重慶大學將超聲波刺激源、表皮電極刺激和光輔助刺激相結合,在無創條件下成功控制了大鼠的基本運動[10]。南京航空航天大學電刺激壁虎中腦的不同腦區誘導壁虎轉向,實現立體空間的無障礙運動[11-12]。山東科技大學通過向家鴿腦部植入微電極,采用微電極刺激禽類特定的膠體間核,控制家鴿起飛、轉彎、前進和后退等動作行為[13-14]。燕山大學通過向鯉魚腦運動區植入腦電極成功控制鯉魚機器人水下運動[15]。
當今國際上對動物機器人的控制方法主要以電刺激方式為主,向動物腦運動區植入微電極,通過電刺激從而控制動物機器人的運動行為。但人工將微電極植入動物腦組織內可引起腦組織出血、水腫和炎癥等腦損傷現象。向動物腦運動區植入微電極時還需精確掌握植入位點,若微電極植入位置出現偏差,也可能導致實驗動物控制無效或喪失運動能力,甚至死亡。對此,尋找新的控制方法來解決這些問題是具有重要的應用價值和研究意義的。到目前為止,有關光對水生動物機器人運動控制影響的研究尚屬空白。
計算機雙目立體視覺是機器視覺的一種重要形式,是基于視差原理并利用成像設備從不同位置獲取被測物體的兩幅圖像,通過計算圖像對應點間的位置偏差,來獲取物體三維幾何信息的方法。由于此種測量系統結構簡單,而且精度和效率都較高,故可應用雙目立體攝像頭獲取鯉魚機器人的三維運動軌跡,將三維運動軌跡坐標應用于鯉魚機器人的測速。
為了開展不同波長的光對水生動物機器人運動行為影響的研究,本文以鯉魚為研究對象,在前期適用于鯉魚機器人光刺激裝置及光控實驗方法的研究基礎上[1],按照波長由小到大的順序將藍、綠、黃、紅不同波長光對鯉魚機器人進行趨光性實驗、光控實驗、測速實驗,采用計算機雙目立體視覺技術對鯉魚機器人運動行為的影響進行檢測與研究,以期發現不同波長的光對鯉魚機器人運動速度控制的規律。
1 材料和方法
1.1 材料與儀器
發光二極管(light-emitting diode,LED)(5 mm,廣東深圳科比微半導體有限公司,中國);生理藥理電子刺激儀(YLS-9A,北京眾實迪創科技發展有限責任公司,中國);自主研制的雙層多通道立體水迷宮[16];華瑞電動磨具(F013020058 FZ-10,上海豪海設備有限公司,中國);丁香酚水門汀(201504,上海榮祥齒科材料有限公司,中國);自主研制的光控裝置;雙目立體視覺攝像模塊(HNY-CV-001,武漢萊娜機器視覺科技有限公司,中國);商業數學軟件 MATLAB R2018a 軟件(MathWorks 公司,美國);統計分析軟件 SPSS22.0(IBM 公司,美國)。
1.2 實驗動物
健康成年鯉魚 40 尾,體重(1.05 ± 0.15)kg,體長(33.50 ± 1.50)cm,購于河北省秦皇島市興龍廣緣商業連鎖有限公司。
1.3 鯉魚的趨光性實驗
按照藍、綠、黃、紅不同波長的光將 40 尾實驗鯉魚隨機分為 4 組,每組 10 尾。選擇藍、綠、黃、紅四種不同波長(455~780 nm)LED 作為趨光性實驗的光源,將 LED 用防水膠固定在自主研制的雙層多通道立體水迷宮[16]下層通道的上沿。先將鯉魚放入水迷宮內,點亮水迷宮左側的 LED,水迷宮右側無光,觀察 LED 對鯉魚運動行為的影響。關閉光源 5 min,避免鯉魚對 LED 光源產生適應性;再點亮水迷宮右側的 LED,水迷宮左側無光,觀察 LED 對鯉魚運動行為的影響。每種波長的 LED 在水迷宮左、右兩側各進行 3 次鯉魚趨光性實驗。
1.4 鯉魚機器人光控裝置搭載位點的確定
鯉魚屬于硬骨魚,其顱骨結構的研究可為光控裝置植入顱骨時的搭載位點及鉆孔深度提供依據。首先對鯉魚進行開顱手術,打開顱腔找到兩根細長的嗅莖,發現嗅莖上方空間存在較多的脂肪組織和腦脊液而沒有腦組織,將脂肪組織和腦脊液清除,用紅色和紫色兩根手術縫合線分別在兩條嗅莖下穿線并將其挑起,如圖 1 所示。對體重 1 kg 鯉魚不同位置的顱骨斷面進行測量,端腦上方的顱骨厚度為 1.05 mm,中腦上方的顱骨厚度為 2.50 mm,小腦上方的顱骨厚度為 3.12 mm。由于兩根細長的嗅莖上方空間沒有腦組織,此處顱骨較薄,既容易將緊固螺釘植入顱骨內,也不會對腦組織造成機械損傷,故選擇嗅莖上方,在顱骨表面上的額骨后沿 10 mm 處作為光控裝置緊固螺釘的植入位點。在鯉魚顱骨表面上的 1、2 處植入緊固螺釘固定光控裝置,如圖 2 所示。
圖1
鯉魚嗅莖
Figure1.
Carp sniffing stem
圖2
緊固螺釘在顱骨表面的植入位點
Figure2.
The implantation site of the fastening screw on the surface of the skull
1.5 鯉魚機器人光控裝置的研制
為使光控鯉魚機器人實驗在有光和無光條件下皆可進行操作,自主研制了一種適用于在任何光照強度環境中都能控制鯉魚機器人水下運動的光控裝置及實施方法。本裝置由搭載板、遮光帶、魚鰭固定帶、跳線板、不同波長的 LED 和導線組成,如圖 3 和圖 4 所示。其中“王”字型的搭載板為裝置主體;遮光帶縫合在搭載板上呈拱橋狀以便更貼合眼部,為其遮擋外界光源以避免外界光源干擾;兩條魚鰭固定帶與搭載板的兩側相連形成交叉點縫合在搭載板上;在遮光帶內外兩側的搭載板上每條支路處焊接成對的跳線板,同一支路的內排光源與外排光源為串聯結構,各個支路光源為并聯結構,每種波長的 LED 可單獨對鯉魚機器人進行光控實驗。光控裝置呈“王”字型結構,內外有兩排 LED 光源,內排光源位于遮光帶內部用來刺激眼睛,外排光源位于遮光帶外部起到提示作用。本發明可為將來水生動物機器人的光控研究與應用提供一種全新的裝置及方法,已獲國家發明專利(ZL201911048995.8)[17]。
圖3
“王”字型搭載板與魚鰭固定帶連接示意圖
Figure3.
Schematic diagram of connection between “Wang” shaped carrying plate and fin fixing belt
圖4
光控裝置搭載在鯉魚機器人的示意圖
Figure4.
Schematic diagram of light stimulation device mounted on a carp robot
1.6 鯉魚機器人的光控實驗
按照藍、綠、黃、紅四種不同波長的光將實驗鯉魚 40 尾隨機分為 4 組,每組 10 尾。將實驗鯉魚置于丁香酚溶液中進行藥浴麻醉。選擇藍、綠、黃、紅四種不同波長(455~780 nm)LED 作為光控的光源,將光控裝置固定搭載在鯉魚嗅莖上方的顱骨上。將搭載光控裝置的鯉魚機器人放入實驗水池中的立體水迷宮內,用 LED 刺激鯉魚左眼,右眼無 LED 刺激,觀察 LED 對鯉魚機器人運動行為的影響;關閉光源 5 min,避免鯉魚對 LED 光源產生適應性,再用 LED 刺激鯉魚右眼,左眼無 LED 刺激,觀察 LED 對鯉魚運動行為的影響。每種波長的 LED 進行實驗 40 次,同種光源刺激左眼、右眼分別各 20 次。光控實驗的參數:電壓 3 V,電流 20 mA,波寬 0.05~60.00 ms,刺激持續時間 30 s,光照亮度 16 000~18 000 mcd,方波輸出類型為連續波。采用定基線雙目立體攝像頭,左、右兩個相機分別對重疊視場中的光源目標進行采集圖像,再利用左、右圖像視差計算鯉魚機器人的目標位置,判斷鯉魚機器人的光控效果。由于跟蹤目標為 LED 光源,暗光條件下為深色背景及目標顏色相對單一,使用核相關濾波算法(kernel correlation filter,KCF)對鯉魚機器人進行跟蹤,獲取鯉魚機器人光控實驗的視頻,并進行運動軌跡的識別與提取。
1.7 光控鯉魚機器人的測速實驗
鯉魚機器人是非剛性運動目標。本課題對 LED 光源目標進行識別,進行左右圖像匹配,提取鯉魚機器人的像素坐標,根據匹配像對和已標定的系統參數獲得鯉魚機器人的三維空間坐標,計算鯉魚機器人的運動行為參數:距離(S)、平均速度(v),如式(1)、(2)所示:
|
|
其中,(X1,Y1,Z1)和(X2,Y2,Z2)分別為單位時間內運動起點和終點坐標。
此時速度是一個向量,如果忽略方向,將其作為一個標量僅表示鯉魚機器人受到光控時運動速度的大小,并以此標量作為衡量鯉魚機器人在不同波長光控時影響運動行為的一個重要指標。
應用統計學軟件 SPSS22.0 對不同波長光源下鯉魚機器人運動速度數據進行處理,將不同波長的光分為藍光組、綠光組、黃光組、紅光組 4 組,用平均數 ± 標準差形式表示光控鯉魚機器人的運動速度,利用單因素方差分析(one way anova,OWA)方法,兩組間比較采用獨立樣本 t 檢驗,P < 0.05 為差異具有統計學意義。
2 結果
2.1 鯉魚的趨光性實驗
鯉魚的趨光性實驗顯示,鯉魚(n = 40)在藍、綠、黃、紅四種不同波長光的光照條件下均躲避 LED 光源向暗處游動,皆表現出避光性即負性趨光性。但不同波長的光源下表現出的程度不同,其中鯉魚對藍光波長(455~470 nm)的表現最強烈,其次是紅光波長(622~780 nm)、黃光波長(577~597 nm)、綠光波長(492~577 nm)。如圖 5 所示,利用雙目立體攝像頭記錄鯉魚的負性趨光性現象;對鯉魚在不同波長光源下的負性趨光性進行了數據統計,如表 1 所示。
圖5
不同波長光下的鯉魚趨光性
Figure5.
Phototaxis of carp robots under light with different wavelengths
2.2 鯉魚機器人的光控實驗
鯉魚機器人運動行為的光控作用,本文以藍色波長(455~470 nm)的光控實驗為例。如圖 6 所示,綠色曲線為鯉魚機器人轉向的運動軌跡,成功光控鯉魚機器人左、右轉向運動,左轉成功率為 57.5%,右轉成功率 52.5%,藍色波長光控效果成功率最高。
圖6
藍色波長的光控制鯉魚機器人的轉向軌跡
Figure6.
Steering trajectory of a carp robot controlled by blue light
2.3 鯉魚機器人的測速實驗
在相同時間內,光控的鯉魚機器人運動距離按照波長從大到小的順序依次為藍光、紅光、黃光、綠光。光控鯉魚機器人 30 s 內其運動速度會發生明顯變化,選取 6 s 內鯉魚機器人的運動速度,光控 1.2 s 后達到第一個峰值,連續波持續刺激第 3 s 后速度達到 350 mm/s。光控的鯉魚機器人會產生明顯反應,運動速度突增的最大值在 30 s 內。不同波長的光控制鯉魚機器人的運動速度,如圖 7 所示,藍、綠、黃、紅不同的顏色的折線分別代表相應波長的光控制速度。
圖7
不同波長的光控制鯉魚機器人的運動速度
Figure7.
Motion velocity of carp robots controlled by different wavelengths light
為避免光控實驗的偶然性,本研究選取并采集 40 尾鯉魚機器人的光控運動參數,利用統計分析軟件 SPSS22.0 對實驗數據統計分析,如表 2 所示。結果顯示,鯉魚機器人在受到藍光光控時運動速度最快。
,n = 40)
Table2.
Motion velocity of carp robots under light with different wavelengths (,n = 40)
3 討論
生物機器人現已成為 21 世紀一個嶄新的前沿高科技領域,其中就包括了可利用生物自身體內的生物神經電信號支配其運動行為的研究[18]。目前國內外利用無線信號采集系統記錄并解碼生物的神經電信號[4],模擬生物體內的生物電信號,再通過腦—機接口技術對生物進行電刺激,從而實現對生物運動行為的控制,如大鼠機器人[19]、壁虎機器人[20]、家鴿機器人[21]等都是通過在腦運動區施加電刺激信號來控制生物運動行為的。然而向腦運動區施加電刺激信號往往是通過腦電極的植入來實現的,腦電極的植入可導致一定程度的腦組織損傷。為了減輕甚至避免對動物造成腦損傷效應,還需研究新的控制方法,尋找一種既能避免腦損傷又能控制動物運動的方法。
在光控生物機器人研究方面,重慶大學課題組設計了一種控制大鼠機器人的系統,分別以超聲波刺激大鼠聽覺神經、表皮電刺激大鼠痛覺神經和 LED 光刺激大鼠視覺神經三種刺激方式來控制大鼠機器人前進和左右轉彎等運動行為,其中應用 LED 光刺激模擬“虛擬”危險光源,大鼠會朝 LED 相反的方向運動[10]。韓國高等科學技術研究院聯合新加坡信息通信研究所研究了一種全新的生物機器人,研究團隊發現爬行動物海龜能感知一定波長范圍的可見光,將光控模塊、控制模塊、獎勵模塊三個模塊安裝在海龜外殼上,光源控制海龜游向航路點到達指定區域后可獲取獎勵模塊提供的食物[22]。本文是在前期工作基礎上開展的進一步研究[1],即采用光控方法可以控制生物機器人的運動,上述研究方法均表明光控方法不僅可行,也具有一定使用價值,是一種新穎的生物控制方法。本課題在前期光控鯉魚機器人研究工作基礎上繼續探索,研究鯉魚對藍、紅、黃、綠色四種不同波長光的趨光性,并進一步從光對鯉魚機器人運動速度影響的角度來揭示藍、紅、黃、綠光四種不同波長光控制鯉魚機器人運動能力的規律。
本研究進行了鯉魚的趨光性實驗,通過實驗發現鯉魚(n = 40)在藍、綠、黃、紅四種不同波長光的光照條件下均躲避光源向暗處游動,皆表現出避光性即負性趨光性。但不同波長的光源下表現負性趨光性的程度不同,其中鯉魚對藍光波長(455~470 nm)的負性趨光性表現最強烈,躲避光源時轉向角度最大,其次是紅光波長(622~780 nm)、黃光波長(577~597 nm)、綠光波長(492~577 nm)。利用雙目立體攝像頭記錄鯉魚的負性趨光性現象,如圖 5 所示;對鯉魚在不同波長光源下的趨光性進行了數據統計,鯉魚負性趨光性的程度從大到小的順序依次為藍光、紅光、黃光、綠光,如表 1 所示。鯉魚趨光性的發現和負性趨光性規律的揭示,為鯉魚機器人光控的研究與應用提供了依據,也為鯉魚機器人光控的研究與應用奠定了基礎,具有重要的科學意義和實用價值。由于本實驗的樣本量還有限,加之趨光性實驗也受到多種因素的影響,所以鯉魚對藍光、紅光、黃光、綠光的負性趨光性規律還有待于進一步的實驗驗證。但鯉魚對不同波長光的反應是不一樣的,這種實驗現象是客觀存在的,對光控生物機器人是具有啟發和指導意義的。
由于外界光照強度是不斷變化的,對光控動物機器人也會產生一定影響。所以為了能夠在任何光照強度環境中都能有效對鯉魚機器人水下運動進行控制,本研究發明了一種光控搭載裝置及方法,如圖 3 和圖 4 所示,解決了以往光控實驗只能在暗光或無光條件下才能進行控制的問題。而如何將光控裝置搭載在鯉魚頭部,需要尋找光控裝置緊固螺釘的適宜植入位點,為此本研究進行了鯉魚顱骨解剖實驗。對鯉魚進行開顱手術,打開顱腔發現與腦相連的兩根細長的嗅莖上方空間存在較多的脂肪組織和腦脊液,而無腦組織,如圖 1 所示。由于兩根細長的嗅莖上方空間沒有腦組織,故選擇嗅莖上方的顱骨作為光控裝置緊固螺釘的適宜植入位點,如圖 2 所示。本研究還進一步對體重 1 kg 鯉魚不同位置的顱骨斷面進行測量,結果也顯示嗅莖上方的顱骨厚度較薄,故既比較容易將緊固螺釘植入顱骨內,又不會對腦組織造成機械損傷。通過解剖實驗,本研究獲得的鯉魚顱骨結構與特征與秉志[23]的學術專著闡述內容基本一致,表明在鯉魚嗅莖上方的顱骨處固定搭載光控裝置是可行的。
本研究依據鯉魚具有負性趨光性的原理,再結合本課題的趨光性實驗,對鯉魚機器人進行了光控實驗。本文以效果相對明顯的藍色光控實驗為例,如圖 6 所示,綠色曲線為鯉魚機器人轉向的運動軌跡,成功光控鯉魚機器人左、右轉向的運動,左轉成功率為 57.5%,右轉成功率為 52.5%,藍光波長(455~470 nm)的光控效果成功率最高。本研究采用光控方法,初步實現了對鯉魚機器人轉向運動的控制。由于可能受到 LED 的電學特性、光學特性以及環境噪聲等因素的影響,實驗成功率仍有待于進一步提升,本課題組將在今后研究工作中繼續探索更加適宜的實驗條件。
本研究選用藍、綠、黃、紅四種 LED 作為刺激光源,由于藍、綠、黃、紅 LED 的波長各不相同,鯉魚機器人光控實驗時其運動行為也不盡相同。對此,本研究進行了光控鯉魚機器人的測速實驗,鯉魚機器人在受不同波長的光控制時其運動速度不同,如圖 7 所示。結果表明,鯉魚機器人受到不同波長的光控制時其運動速度是不同的,從大到小的順序依次為藍、紅、黃、綠,如表 2 所示,此結果與鯉魚的趨光性實驗結果相同,由此進一步驗證了鯉魚的趨光性實驗結果。本研究表明,鯉魚機器人的光控方法具有可行性。但至今鯉魚機器人的光控機制尚不十分清楚,有待于進一步從視覺器官及視覺中樞等方面進行更深入的研究。
應用光控技術控制生物機器人是一個新穎的控制方法,具有重要的科學研究意義與潛在的實際應用價值。開展光控水生動物機器人運動行為的科學研究是一項探索性工作,在生物控制領域,尋找一種既能夠控制生物機器人又可減輕或避免腦組織損傷的有效控制方法是當前研究的一個重要課題。
4 結論
為研究不同波長的光對鯉魚機器人運動行為的影響,本研究對鯉魚機器人進行了鯉魚趨光性實驗、鯉魚顱骨解剖實驗、鯉魚機器人光控實驗和測速實驗。發現了鯉魚具有負性趨光性,由強到弱的程度依次為藍光、紅光、黃光、綠光。通過鯉魚顱骨解剖實驗,確定光控裝置的搭載適宜位點為鯉魚嗅莖上方的顱骨。發明了一種適用于任何光照強度環境中的光控裝置及方法,突破了以往光控只能在暗光或無光條件下才能應用的限制,使光控生物機器人能夠在任何光照度環境中實際應用成為可能。對鯉魚機器人進行光控實驗,左轉成功率為 57.5%,右轉成功率為 52.5%;利用計算機雙目立體視覺技術對鯉魚機器人運動行為檢測,應用 KCF 算法跟蹤鯉魚機器人并獲取其運動軌跡;根據其運動軌跡計算不同波長光控制下的鯉魚機器人運動速度。結果表明,鯉魚機器人受到不同波長的光控制時其運動速度是不同的,從大到小的順序依次為藍光、紅光、黃光、綠光,初步揭示了不同波長的光控制鯉魚機器人運動速度的規律。本研究初步實現了應用不同波長的光控制鯉魚機器人的運動行為,提供了一種可避免腦損傷的鯉魚機器人控制新方法,為光控生物機器人的研究與應用奠定了一定基礎。
利益沖突聲明:本文全體作者均聲明不存在利益沖突。