本文針對服務護理領域對專用輔助護理設備的需求,結合TRIZ理論思想設計一種可實現仿人喂食功能的輔助進餐機器人。該機器人本體采用串聯關節型機械手臂模擬人體手臂運動,實現進餐時移位功能;末端采用電機驅動勺柄構件進行往復運動,模擬人體手部送喂動作實現進餐功能;整體采用眼在手上安裝方式模擬人類視覺,實現基于視覺信息的機械手自動送喂功能。綜合考慮輔助進餐機器人的喂食功能及其與人交互時的相對位置關系,滿足最低自由度配置下具備空間上的運動靈活性,在此條件下確定輔助進餐機器人的結構,分析其受力情況,對具體應用場景適宜位置進行討論說明。仿真結果表明所設計的輔助進餐機器人能夠在低自由度配置下,滿足工作空間運動靈活性的需求。
引用本文: 李抒桐, 肖金壯, 孟恭, 史小爍, 管練武, 王焱. 一種輔助進餐機器人的結構設計與性能分析. 生物醫學工程學雜志, 2022, 39(1): 149-157. doi: 10.7507/1001-5515.202105088 復制
版權信息: ?四川大學華西醫院華西期刊社《生物醫學工程學雜志》版權所有,未經授權不得轉載、改編
引言
來自《世界人口展望:2019年修訂版》的數據顯示,到2050年全世界每6人中就有1人年齡在65歲以上,占比16%,而2019年該占比為9%。此現狀表明了全球人口正步入老齡化階段,世界上幾乎每個國家的老齡人口數量和比例均在增加[1]。老年人口快速增加,特別是80歲以上的高齡老人和部分失能老人的數量,這部分群體對醫療及養老服務的需求日益增長。此外,腦卒中及肌肉萎縮病變患者會出現肢體運動功能不健全的特征,因病導致身體羸弱,以上群體也將增加對醫療護理服務的深度依賴[2-3]。隨著患者數量逐漸增多,既要護理人員配備合理,又需保證護理服務的質量,使得護理人員的工作任務和負荷隨之加重。護理服務中的喂食任務屬于必需且重復的工作內容,輔助進餐機器人作為護理服務裝置中的一類,可以輔助患者自主完成進食,一定程度上可將護理人員從繁重而重復的體力勞動中解放出來。
輔助進餐機器人涉及機構學、力學、控制及仿生學等多學科技術的綜合。20世紀80年代初期荷蘭和法國學者首先對具備助餐功能的機器人進行了研究,研發了RSI服務機械手和MANUS服務機器人,它們具備助餐功能但并不專用于實現助餐[4-5]。英國Mike Topping公司研發的Handy1和其二型服務機器人通過開關控制重復送喂過程實現助餐功能[6]。日本Secom公司研發的My Spoon機器人通過使用者控制操縱桿實現機器人勺子自動在四個小餐盤中舀取食物并送到人嘴邊進行喂食[7]。美國Desin機器人公司2018年推出一款名為Obi的智能喂飯機器人,它配有一個安裝湯匙的機械臂,機械臂具有360°旋轉和上下伸展功能,通過兩個按鈕執行喂飯操作,其中一個按鈕控制手臂在四個碗槽中來回切換。Obi通過教學模式準確找到患者的嘴部,即按下教學(Teach)按鈕,調整到適當的高度后,Obi在喂飯過程中會記住該位置,如此往復實現喂食[8]。同年澳大利亞推出了一款喂飯服務機器人,人們將它系在腰上,機械手可以上下移動,用餐時人們稍微挪動頭部實現進食[9]。國內對助餐機器人的研究始于2006年以“康復與愛心”為主題的設計大賽。廣東工業大學研發的助餐機器人無電機驅動,通過患者腳部運動實現進餐和翻書功能;海軍工程大學研發的助餐機器人的餐臺可旋轉,通過腳踏按鈕能夠輪流取到所有餐盤內的食物,由于具有一個自由度僅能完成特定環境的簡單進餐;哈爾濱工程大學研發的MY TABLE系列助餐機器人通過腳踏實現對餐盤中的食物進行選餐和進食[10-12]。
綜合分析國內外已有的助餐機器人類型,基本構型多為仿人式機械手臂且末端搭載勺體,通過各關節旋轉運動實現勺體從餐盤到患者嘴部的仿人軌跡式移動過程,以形成近似仿人喂食操作。該類助餐機器人通常由機械結構、傳感系統、驅動系統和控制系統組成來實現助餐,仿人式分別體現在其結構形態和功能用途上。結構仿人化實現喂食,即機械臂運動帶動末端勺體轉動形成仿人式喂食操作。因機器人自身的結構特性所限,通常機器人自由度數目越多,仿人運動程度越高,靈活性越好,但相應結構更復雜,控制和調試難度也將增加,故輔助進餐機器人結構應在滿足最低自由度配置下兼具空間上的運動靈活性。鑒于此,本文采用發明問題解決理論(theory of inventive problem solving,TRIZ)設計了一款由執行機構、驅動部分、檢測部分組成的輔助進餐機器人。
1 輔助進餐機器人的功能分析與結構設計
輔助進餐機器人執行輔助進食任務時,包含與被護理者間的交互過程,因此,從與被護理者間的相對位置關系出發來確立輔助進餐機器人的基本輪廓尺寸,從其具體功能用途出發進一步確立各部分結構尺寸。通過TRIZ理論的因果鏈分析法對輔助進餐機器人的需求必要性進行分析說明,結合發明原理中的分割、局部質量、合并、普遍性及周期性動作原理進行輔助設計,最終形成該款輔助進餐機器人整機構型。
1.1 TRIZ分析法
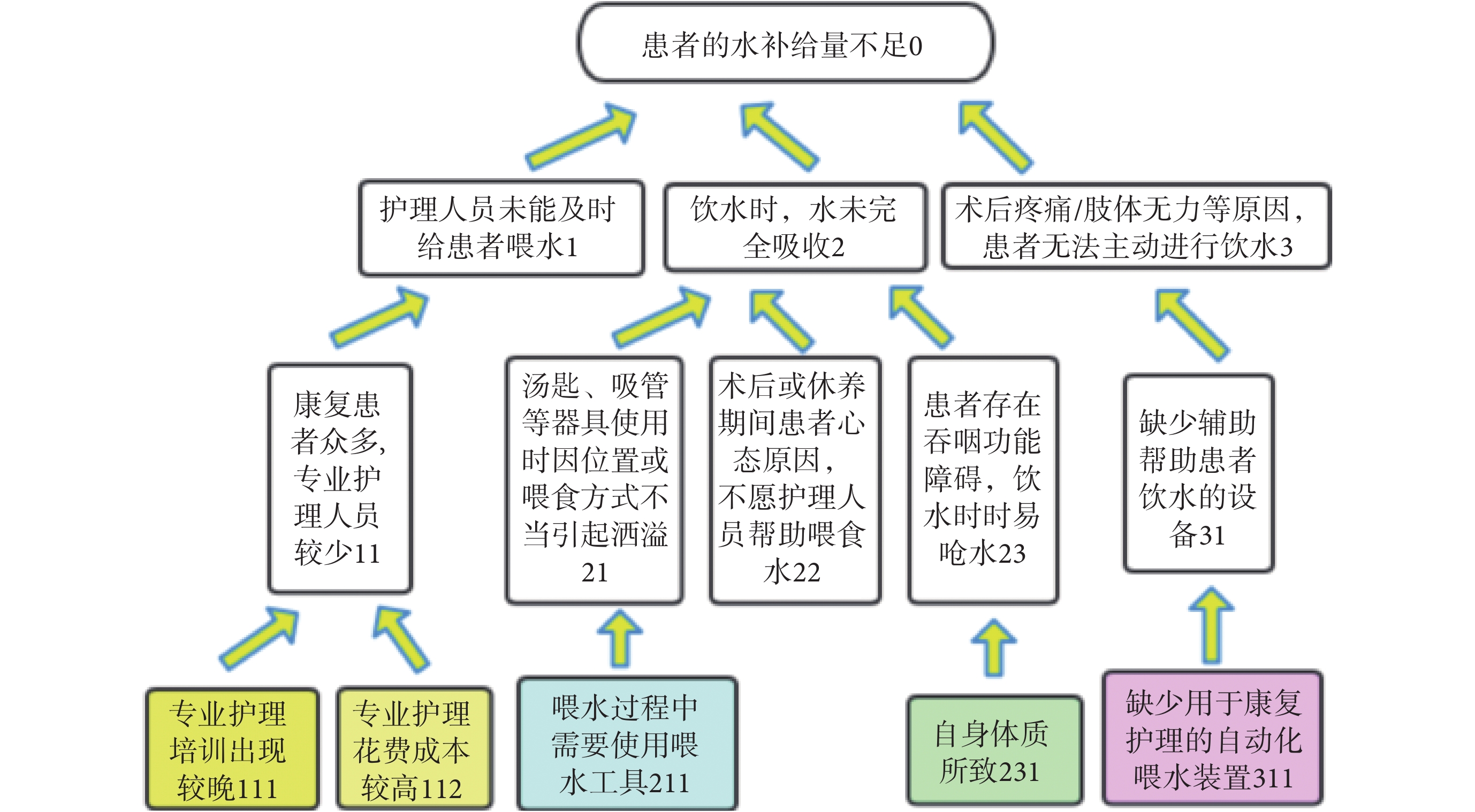
采用TRIZ理論八大技術系統進化法則中的減少人工介入進化法則實現機器動作代替人工操作,提出輔助進餐機器人基本架構[13]。在喂食和喂水功能需求分析的基礎上,通過TRIZ理論的因果鏈分析得出喂水功能方案設計,如圖1所示。
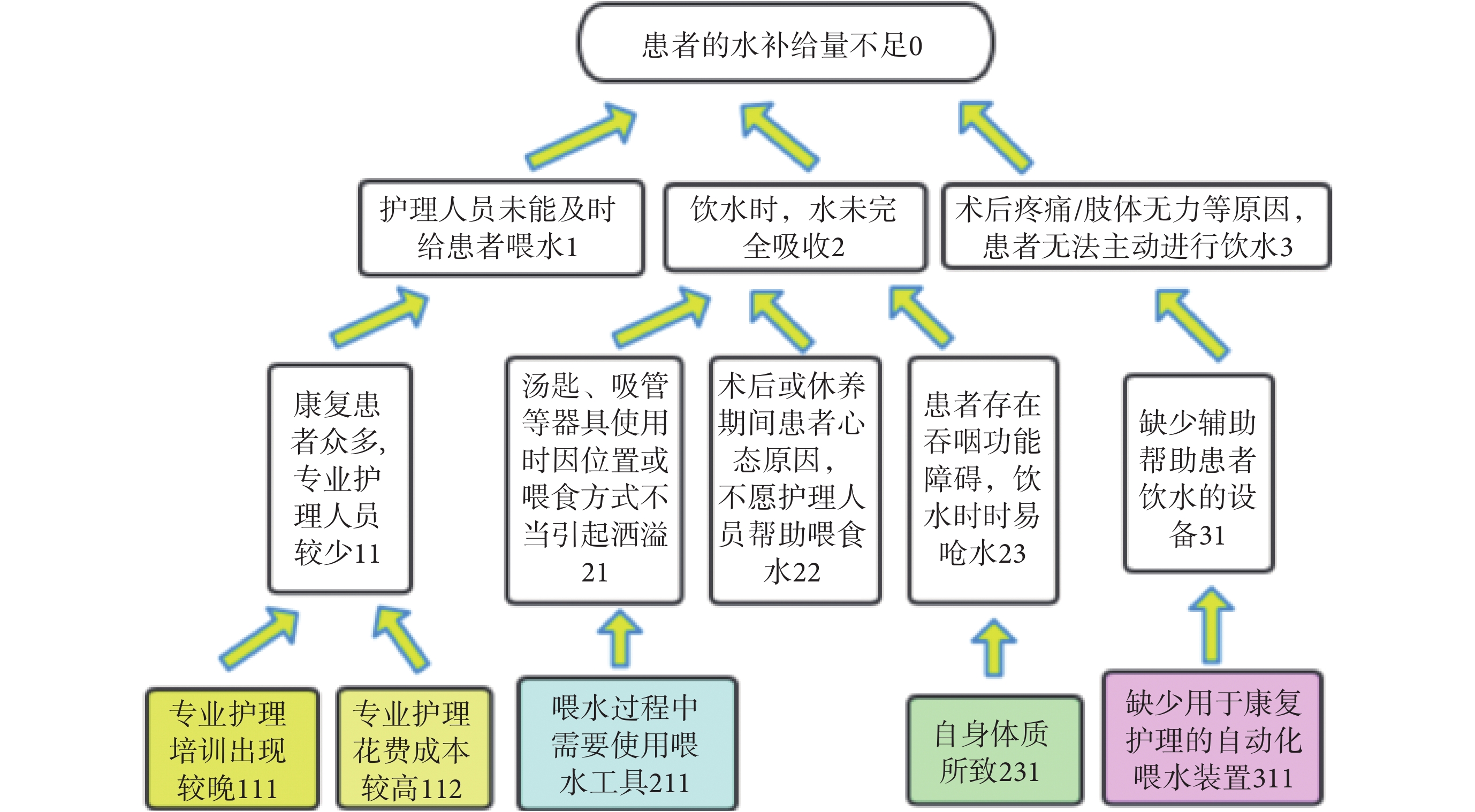 圖1
喂水功能因果鏈分析
Figure1.
Causal chain analysis of water feeding function
圖1
喂水功能因果鏈分析
Figure1.
Causal chain analysis of water feeding function
通過因果鏈分析得到所存在的問題:111、112、211、231、311。初步分析可知問題111和231是客觀存在的,因此通過解決其他存在的問題作為技術方案。
方案一為112,即專業護理人員全天候陪護,但此方式需花費大量時間與人力,實現成本較高,尤其在全球人口老齡化程度加劇情況下,不屬于可持續采用優選方案;方案二為211,即研發一種新的喂水工具,喂水過程中不會產生灑溢等現象,然而湯匙和吸管作為喂水常用工具已使用多年,短期內實現具有難度;方案三為22,即患者術后或臥床療養期間會伴有悲傷、焦躁等消極情緒,此時一方面需要患者親友的開導與陪伴,另一方面則需患者的自身疏導,需要時間來緩慢調理;方案四為311,即設計一種能夠自動實現喂水功能的裝置,達到輔助患者完成飲水的目標,并保證裝置靈活精巧,讓患者使用時無壓力。經初期分析,方案四所包含的設計一種能夠自動實現喂水功能的裝置是目前解決患者水分補給量不足這一問題的較可行方案。
1.2 輔助進餐機器人的結構設計
本文設計的輔助進餐機器人考慮模擬仿人喂食方式實現自主喂飯喂水功能。該設計滿足TRIZ理論中減少人工介入的進化法則,其末端采用往復運動構件等效常規助餐機器人末端所使用的旋轉勺體來實現喂食功能。常規助餐機器人需要勺體在餐盤與患者嘴部進行往復旋轉運動,所喂餐食需為固體類,喂食湯水類容易灑溢,本文設計的輔助進餐機器人可同時實現喂食和喂水功能。
結合TRIZ理論發明原理中的分割原理,將物體分割為獨立的部分并使物體成為可組合的,將喂食和喂水功能分開分析,將執行機構前端和末端分別處理。局部質量原理和合并原理體現于執行機構末端喂食模塊的設計,使物體的每一部分處于最有利于其運行的條件下,不同部分實現不同功能,并且合并空間上的同類或相鄰物體。普遍性原理體現于輔助進餐機器人能夠同時實現喂食和喂水功能,用以代替護理人員繁重而重復的工作。
整個機械結構裝置包括底座、大臂、小臂及末端操作器,由肩關節、肘關節、腕關節串聯而成。要求機器人可以輔助使用者實現喂飯喂水的雙重操作,并滿足結構合理緊湊、質量輕、靈活度高、穩定性強、驅動及傳動部分噪聲低、環保無害材質等條件,滿足最低限度下的自由度配置的要求。
1.2.1 人機相對位置關系分析
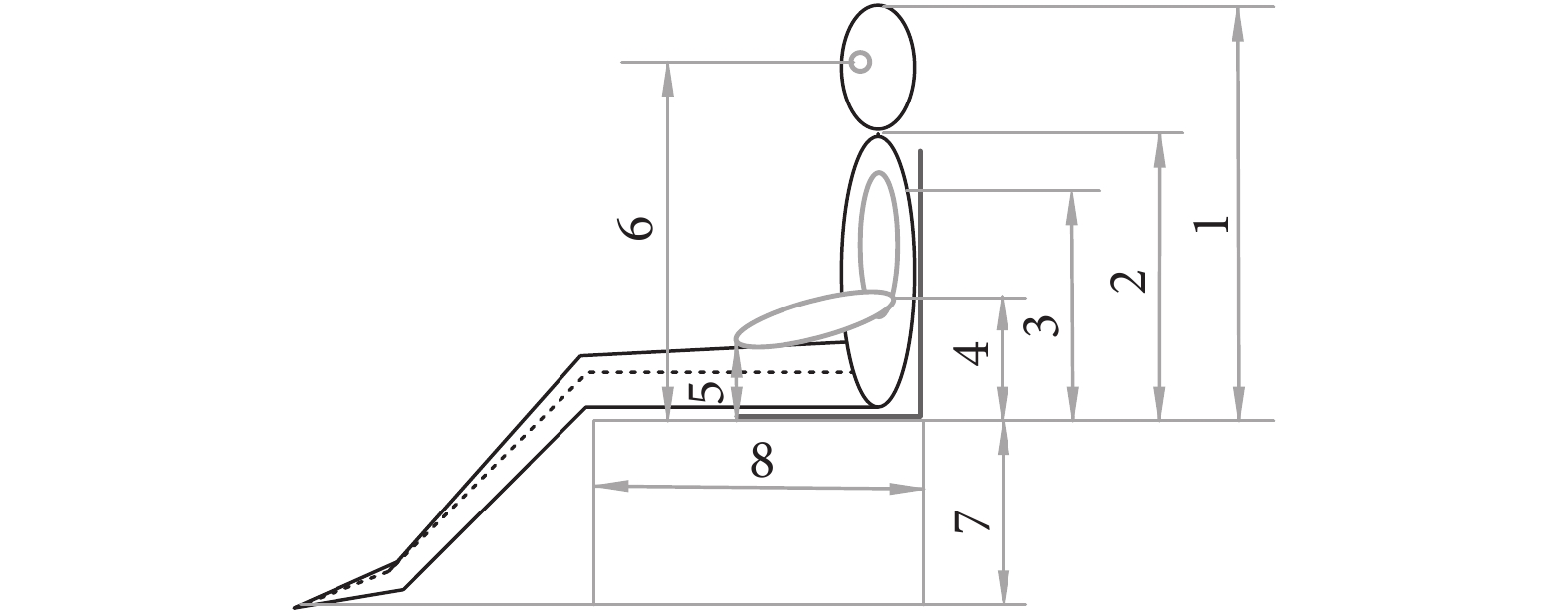
工作模式下的輔助進餐機器人與被護理者間的位置基本處于被護理者呈坐立姿勢或坐臥姿勢,輔助護理機器人位于被護理者正前方位置或側方位置[14]。根據現代人體尺寸數據,得出現代人體呈坐姿時各部位尺寸與人體身高關系,其中人體坐姿測量簡圖如圖2所示,人體坐姿基本尺寸與身高比例對照關系如表1所示。
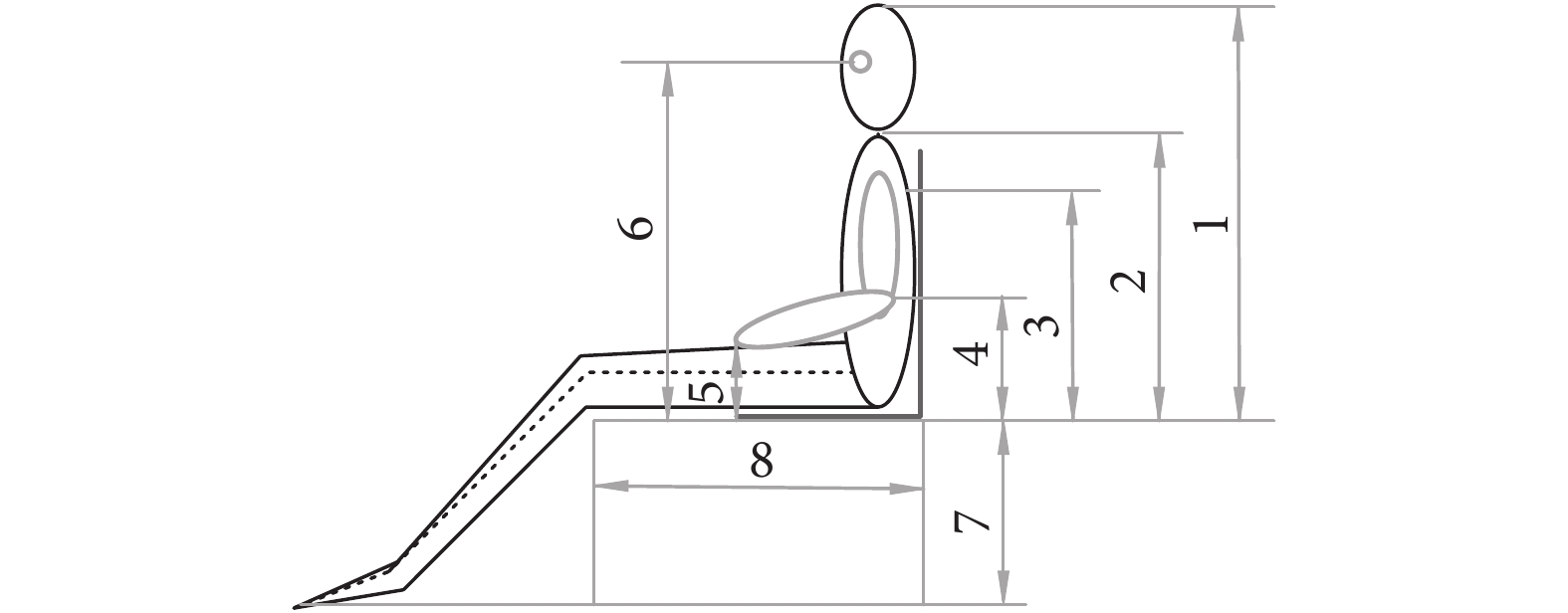 圖2
人體坐姿測量示意圖
Figure2.
Measurement of human sitting size
圖2
人體坐姿測量示意圖
Figure2.
Measurement of human sitting size
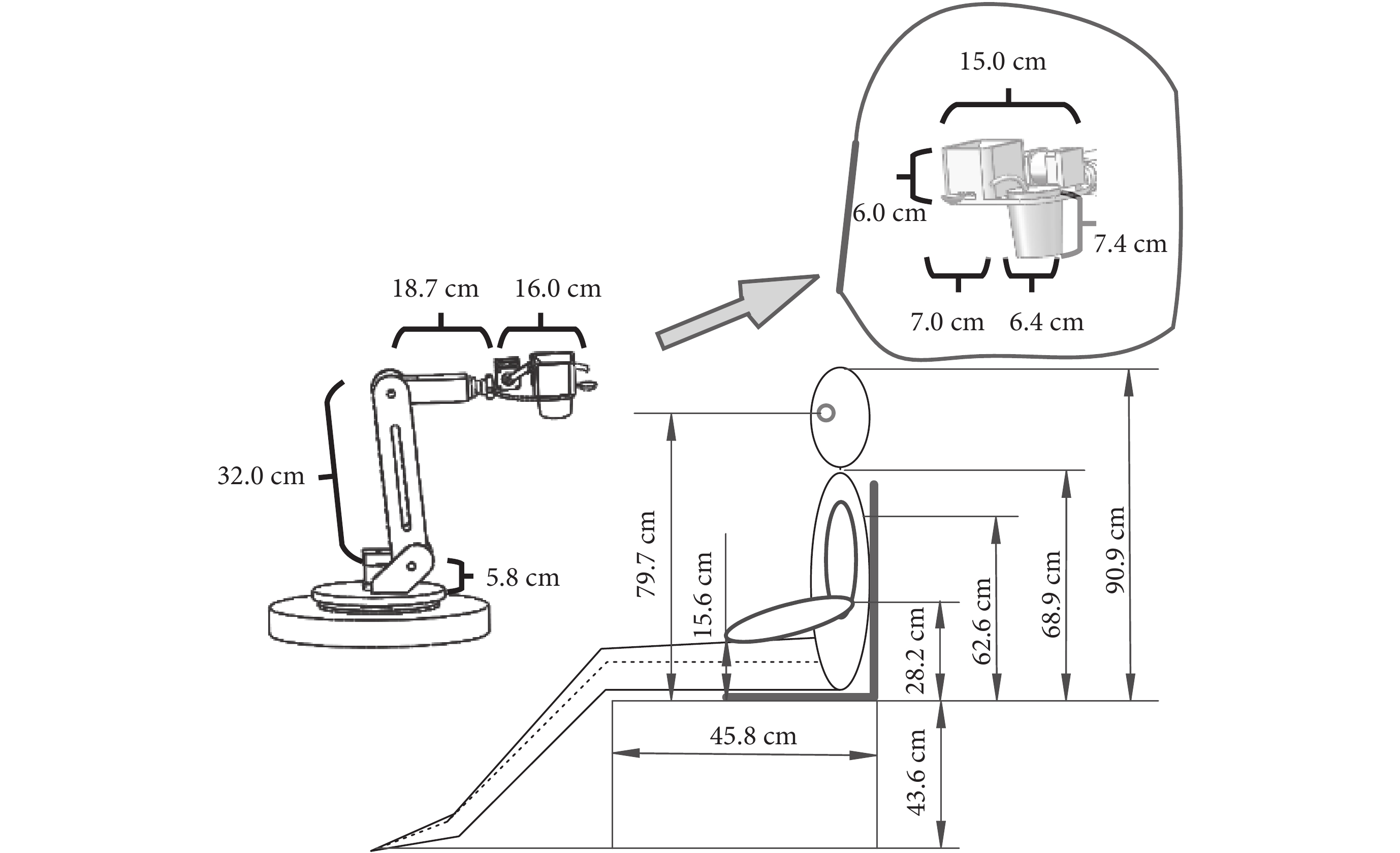
人體坐姿測量簡圖中以人體大腿部與座椅接觸處為分界線,量測自其向上至肘部、肩部、脊椎部、眼部和頭頂部的距離,以及坐姿狀態時腿高、坐深及至下方位的距離。根據《中國居民營養與慢性病狀況報告(2020年)》顯示,我國居民體格發育與營養不足問題持續改善,城鄉差異逐步縮小,一方面體現在居民的平均身高持續增長,我國18~44歲的男性和女性平均身高分別為169.7 cm和158.0 cm,與2015年相比分別增加1.2 cm和0.8 cm[15]。據此將人體身高基本尺寸選取為169.7 cm,以男性身高作為基準,當輔助護理機器人與男性被護理者相對位置為可達時,對應各部位尺寸略小的女性被護理者則必然可達。由人體坐姿基本尺寸與身高比例關系計算得到人體各部位基本尺寸,同時分析人機相對位置關系,依據人體測量學和人機工程學統計數據,結合輔助進餐機器人的功能特點初步確立輔助進餐機器人輪廓尺寸,如圖3所示。
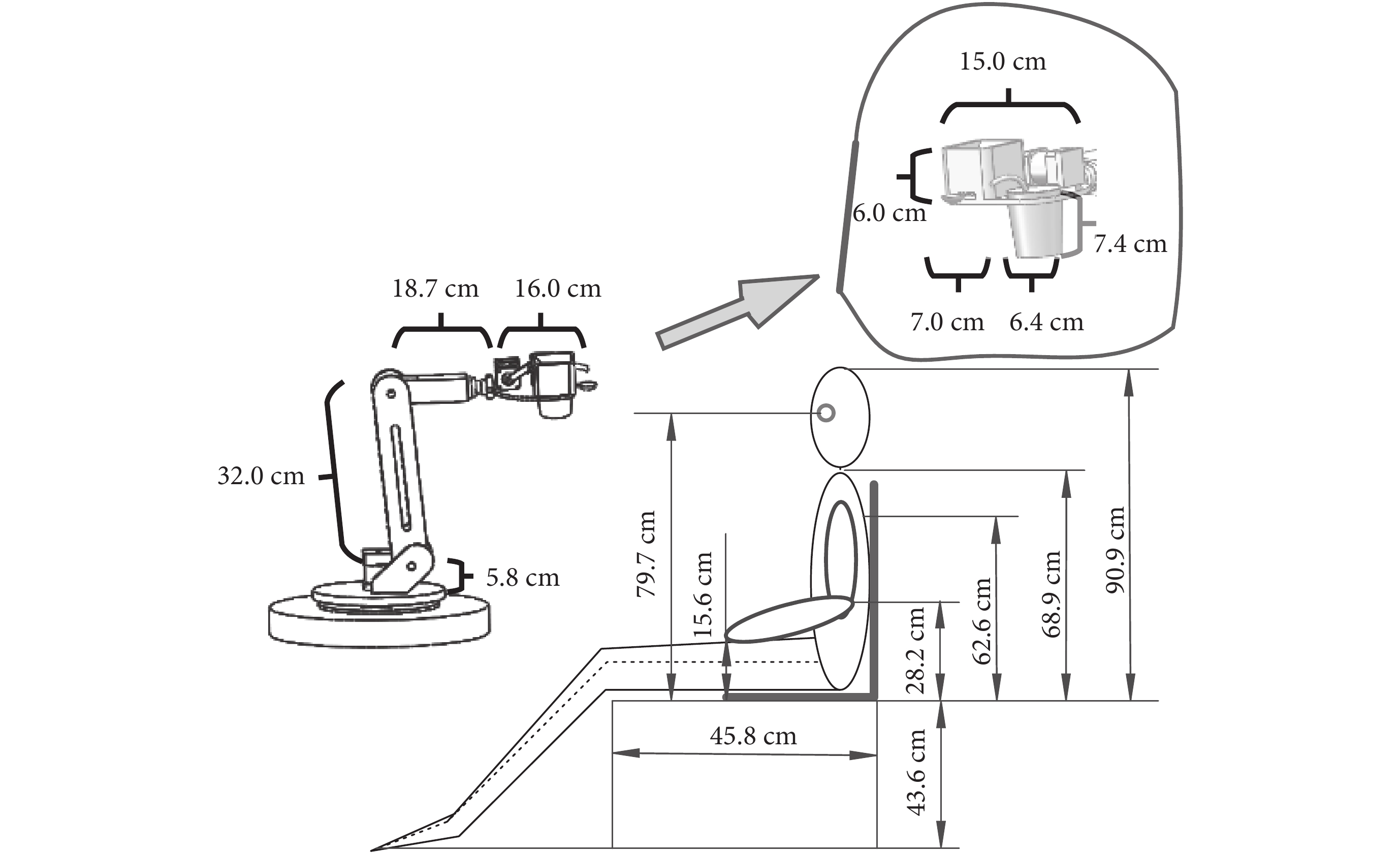 圖3
人機相對位置
Figure3.
Relative position between human and dinning robot
圖3
人機相對位置
Figure3.
Relative position between human and dinning robot
坐姿狀態時人體坐姿眼高為79.7 cm,坐姿脊椎點高為68.9 cm,坐高為90.9 cm。輔助進餐機器人處于伸展狀態時,其三連桿加末端模塊總長為72.5 cm,處于人體坐姿眼高與坐姿脊椎點高之間。輔助進餐機器人一般工作到達位置是被護理者嘴部,因此無論輔助進餐機器人底座置于座椅分界處平齊位置,還是置于一般餐桌所處位置,即被護理者前胸處正前方或側方位置,其執行機構末端均可到達被護理者嘴部位置。末端喂食模塊長度為16.0 cm,正面面對被護理者時的寬度為15.0 cm,餐食盒寬度為7.0 cm,飲品杯直徑為6.4 cm。餐食盒與飲品杯中心距約為7.0 cm,且餐勺與吸管處于平齊位置,被護理者頭部微微傾轉即可獲取到餐食與飲品。因此該尺寸配置下的輔助進餐機器人可實現助餐功能。
1.2.2 喂食模塊設計
喂食模塊置于輔助進餐機器人末端,與使用者嘴部相互交互,模擬仿人喂食動作中的固定旋轉飯勺和俯仰喂水過程。機器人完全模仿人手喂食動作過程需配置多自由度,此時末端操作器控制將變得復雜,因此本文中采用等效功能替換方式設計喂食模塊。
末端操作器設計為并聯在一起的吸取式喂水部分和伸縮式喂飯部分,通過間歇循環的方式進行喂食。如術后或身體虛弱者需進食流食或半流食,可直接在喂水區域放置相應載食杯,通過吸管吸食。若能夠進食時蔬飯類,配好比例放入餐食盒處,通過電機驅動連桿帶動勺體進行伸縮往復運動實現喂食,此部分采用TRIZ理論中周期性動作原理,用周期性動作代替連續動作。喂食模塊和喂飯機構原理如圖4所示,其中包含喂飯模塊初始階段,即復位階段,勺體運動過程中期階段,以及勺體伸出階段,即送喂狀態。
 圖4
喂食模塊
Figure4.
Feeding module
圖4
喂食模塊
Figure4.
Feeding module
1.2.3 整機結構設計
輔助進餐機器人設計可視為機械臂和末端操作器的設計,即喂食模塊和整機機構的設計。綜合考慮輔助進餐機器人的動作位姿及對軌跡的要求,選用關節型機器人,因為關節型機器人具有工作范圍大、靈活性好、避障能力強等特點。本文設計的喂水喂飯機器人共包括七個部分:底座、肩關節、大臂、肘關節、小臂、腕關節、喂食模塊。總體機械臂傳動機構包括4個自由度,分別為:肩部回轉、大臂俯仰、小臂俯仰、腕部回轉。
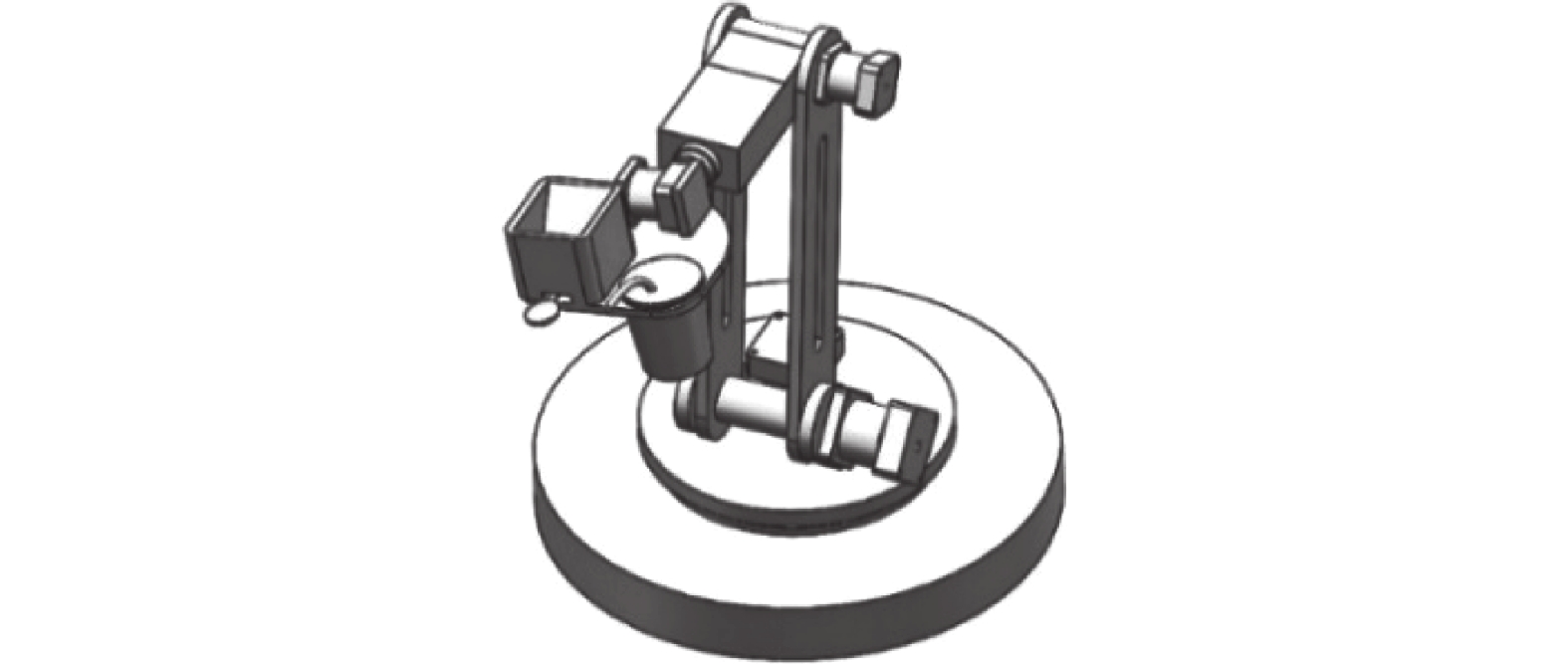
整個機械結構裝置由底座、大臂、小臂以及末端操作器構成,通過回轉關節、肘關節、腕關節串聯而成。有足夠的活動范圍,滿足最低自由度設計,同時實現所需功能,如圖5所示。底座連接肩部,承擔著整個系統的重量,底座中央則是肩部回轉的動力源,此形式結構緊湊,節約空間。
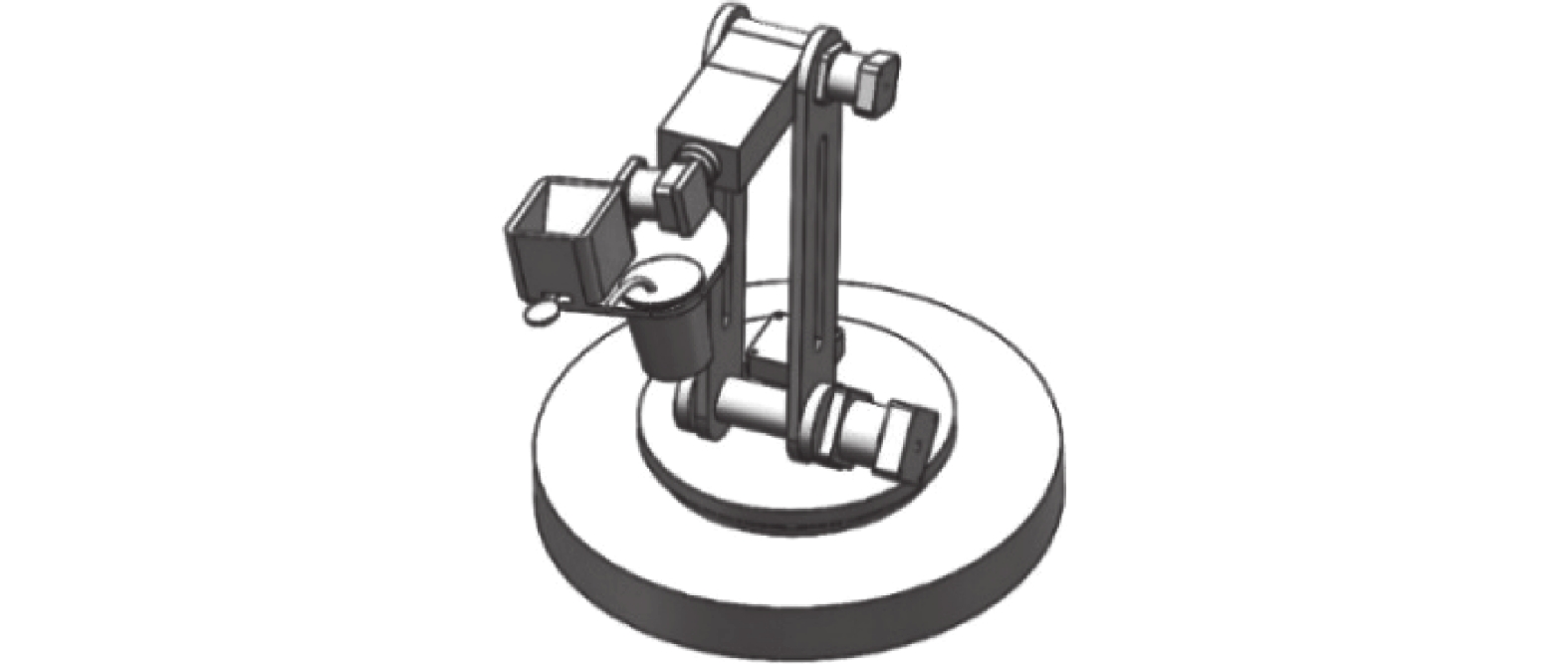 圖5
整機機構
Figure5.
Mechanical structure
圖5
整機機構
Figure5.
Mechanical structure
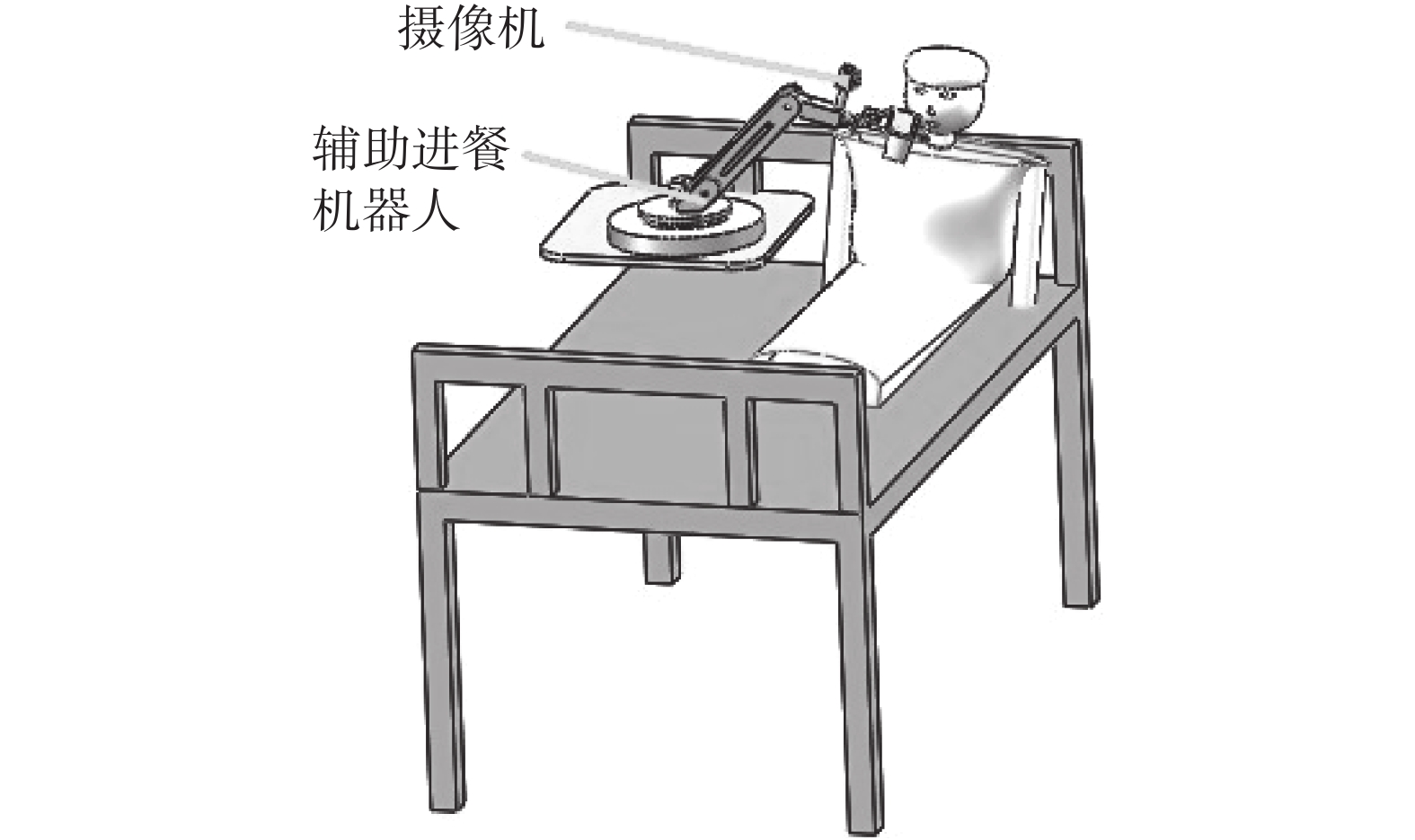
按照攝像機安裝位置的不同,一般可以分為眼在手上(eye in hand)和眼在手外(eye to hand)。眼在手上安裝方式可以實現精確控制,但對系統的標定誤差和機器人的運動誤差敏感。眼在手外的安裝方式對機器人的運動誤差不敏感,可同時觀測到目標與執行機構末端位置,但該方式易引起目標遮擋或丟失[16-17]。綜合分析輔助護理機器人的應用場合,考慮到減少攝像頭安裝、定位和傳輸數據的布線帶來的繁瑣問題,采用了眼在手上的攝像頭安裝方式。同時考慮到機器人末端需配置喂飯喂水系統,將攝像機安裝于執行機構末端偏上位置,以固定的相對位置安裝,如圖6所示。
 圖6
安裝配置圖
Figure6.
Installation configuration diagram
圖6
安裝配置圖
Figure6.
Installation configuration diagram
2 輔助進餐機器人的靜力學與運動學分析
為進一步分析輔助進餐機器人的結構特征,對其加載外部載荷進行靜力學分析,采用改進D-H法建立機械臂關節坐標系。
2.1 輔助進餐機器人的靜力學分析
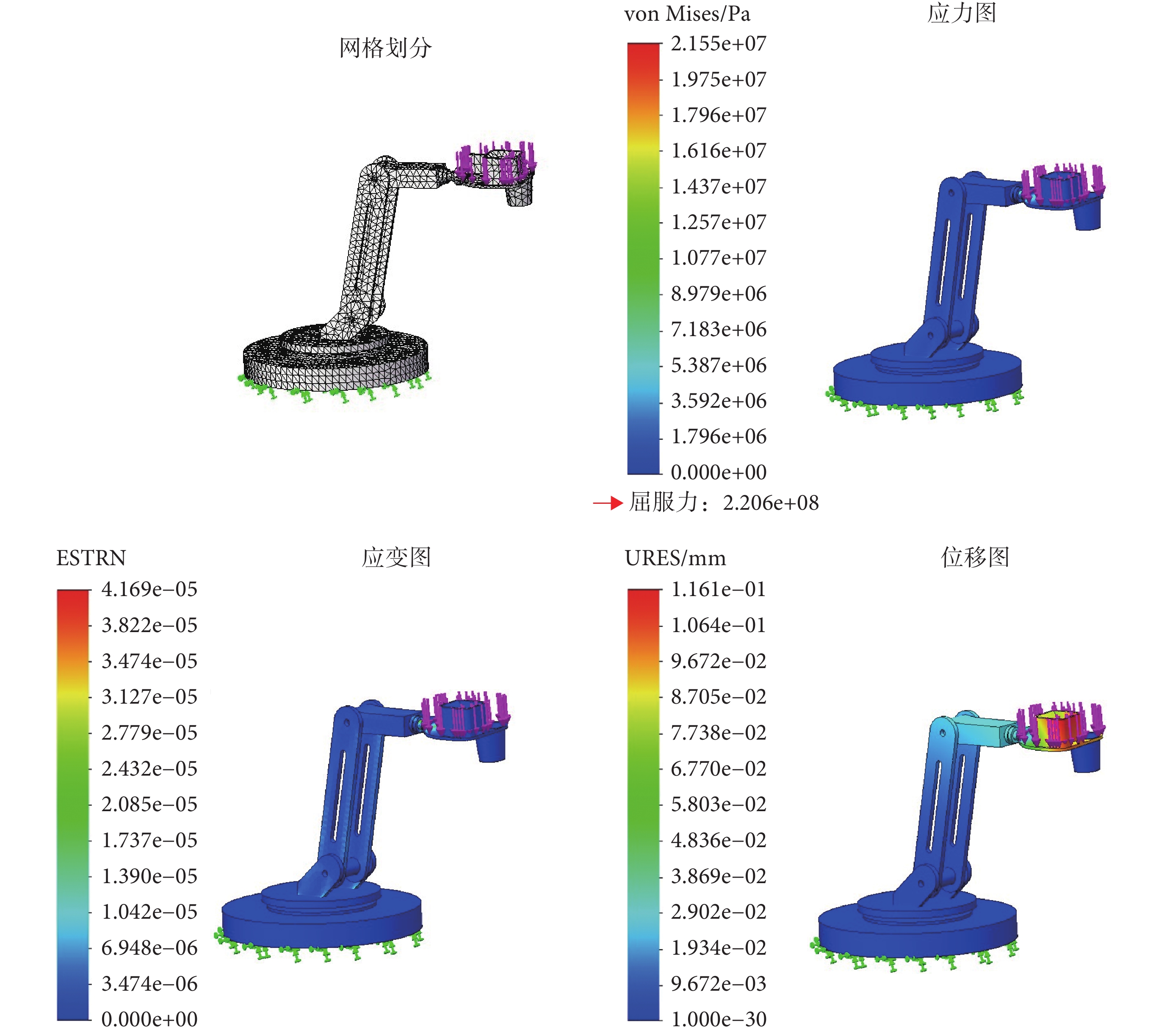
為確保輔助進餐機器人具有足夠的強度和剛度,對其進行靜力學校核[18-20]。應用Solidworks中的simulation模塊,機器人所承負載主要來自喂食模塊。輔助進餐機器人各零部件采用6061鋁合金,通過施加約束和載荷、選定接觸類型和劃分網格進行分析,考慮到喂食模塊主要由支撐板承重,因此分析時將載荷直接加載于支撐板上,如圖7所示。
 圖7
加載外部載荷
Figure7.
Applying external load
圖7
加載外部載荷
Figure7.
Applying external load
靜力學分析中各零部件間忽略間隙接觸,應力、應變和位移變化情況如圖7所示。結果中的最大位移來自負載和自重,滿足輔助進餐機器人工作要求的末端誤差設為0.5 mm。結果中的最大形變位移為0.116 mm,機器人的結構剛度滿足要求。結果中工作時承載的最大應力為21.55 MPa,安全系數約為2.6,滿足靜力學強度要求。
2.2 輔助進餐機器人運動學分析
輔助進餐機器人實施送喂任務時,通過各關節運動實現末端喂食模塊的位姿變化,末端喂食模塊的活動范圍是衡量其工作能力的重要指標,本部分主要從幾何角度分析輔助進餐機器人的運動特性,即運動學分析[21]。
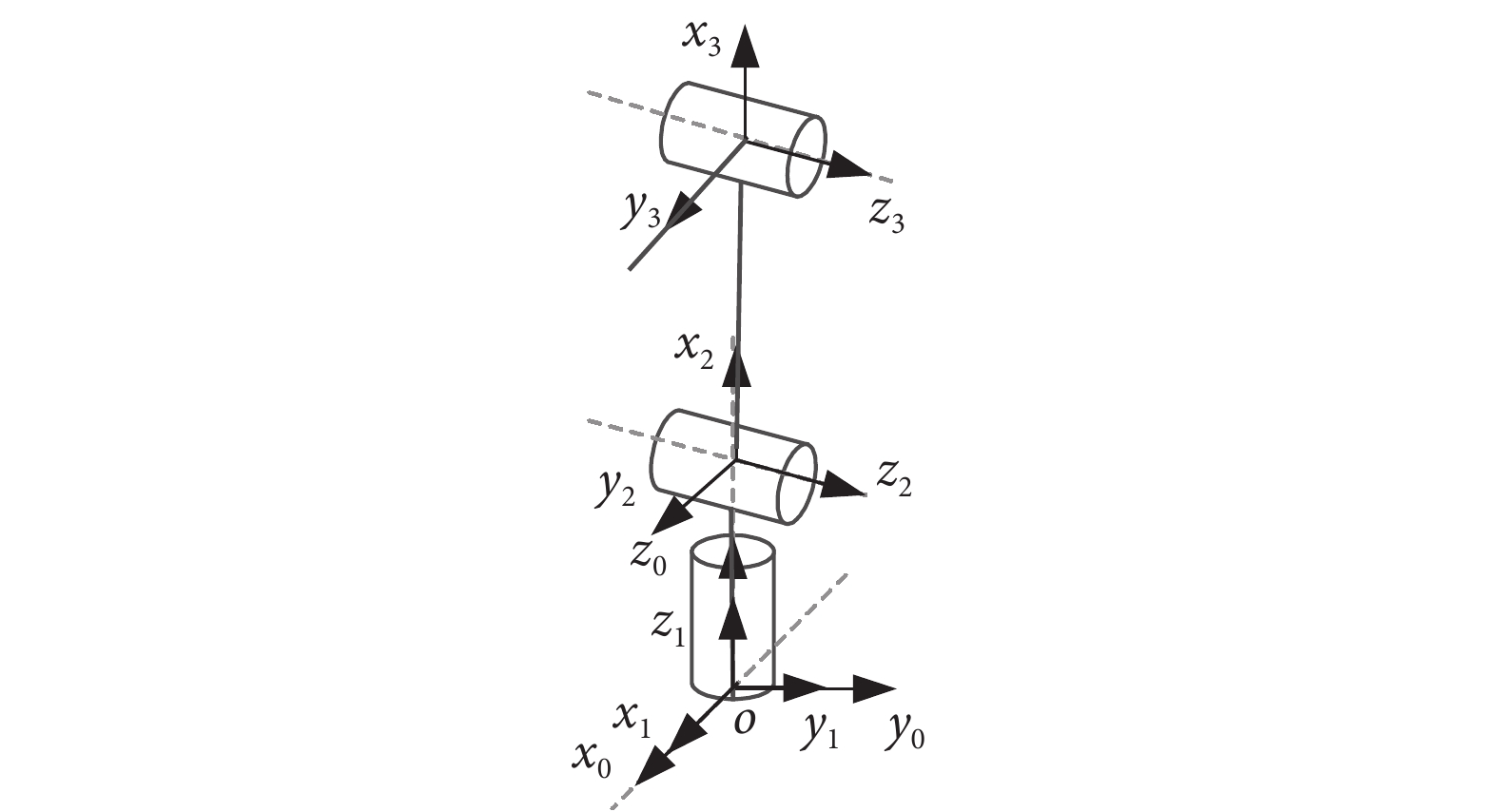
該款輔助進餐機器人屬于4自由度旋轉關節仿人機械手,研究其運動學問題時,將末端喂食模塊視作和小臂固連的桿件。因末端旋轉關節的轉動對末端可達范圍無影響,因此工作空間分析時忽略末端旋轉關節,原結構可等效為三自由度機械臂。根據改進D-H法建立機械臂關節坐標系如圖8所示,確定連桿的D-H參數如表2所示。相鄰兩個坐標系間的齊次變換矩陣表示如下:
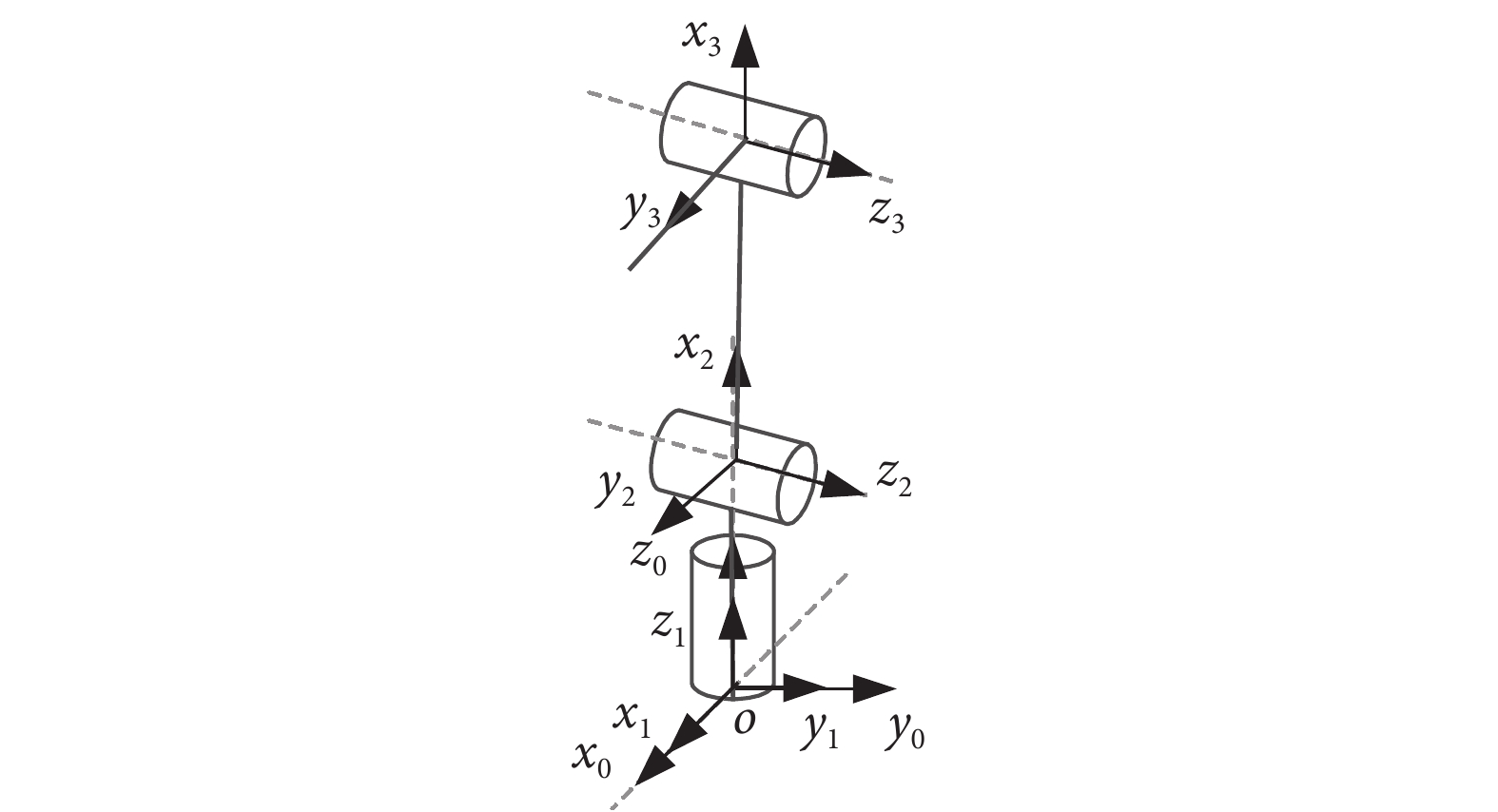 圖8
連桿坐標系
Figure8.
Link coordinate system
圖8
連桿坐標系
Figure8.
Link coordinate system
 |
將確定的D-H參數代入,求得從機械臂基座到末端的齊次變換矩陣  :
:
 |
 |
 |
 |
 |
式中 ,
, 。以上通過輔助進餐機器人本體的幾何參數和關節變量求得末端喂食模塊相對于參考坐標系的位姿,以此建立其運動方程。
。以上通過輔助進餐機器人本體的幾何參數和關節變量求得末端喂食模塊相對于參考坐標系的位姿,以此建立其運動方程。
2.3 輔助進餐機器人運動分析與仿真
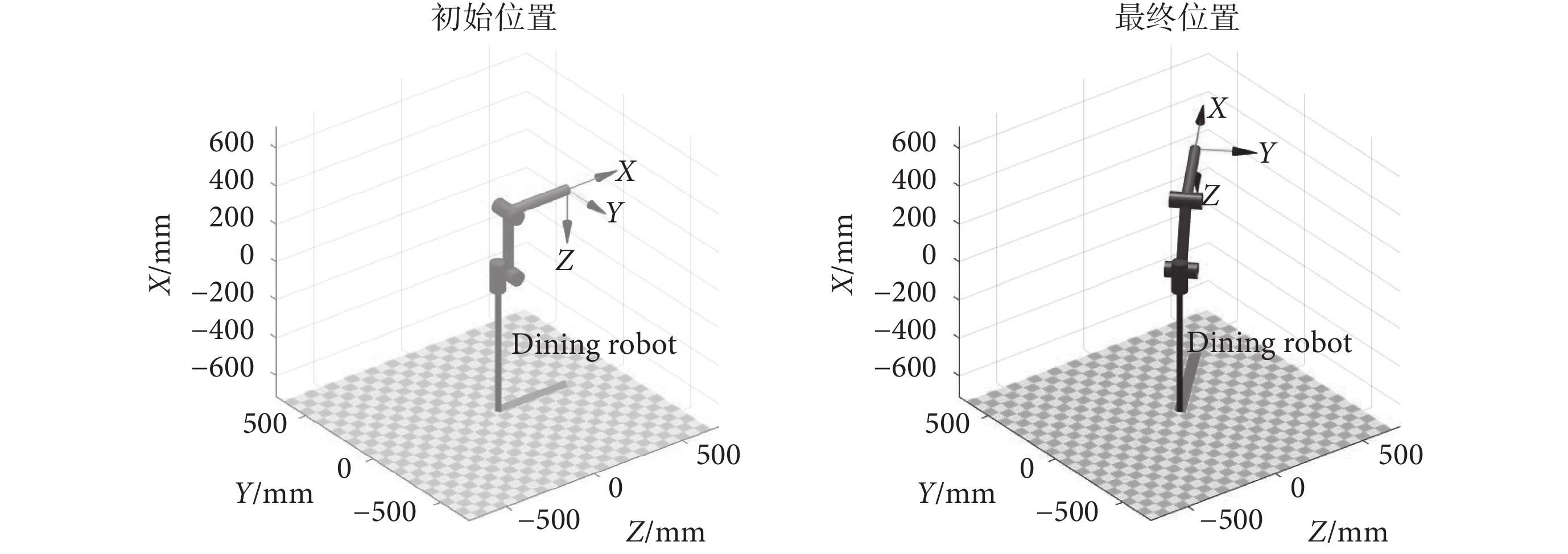
本部分采用關節空間軌跡規劃對所設計的輔助進餐機器人進行運動分析,關節空間軌跡規劃即指將輔助進餐機器人的關節變量變換成與時間的關系,對其角速度和角加速度進行約束。應用五次多項式插值方法,根據給定的初始和最終位置、速度、加速度和運動軌跡時間進行求解。將初始關節角度和終止關節角度分別設為(0, pi/2, ? pi/2)和(pi/4, pi/3, ? pi/4),如圖9所示。
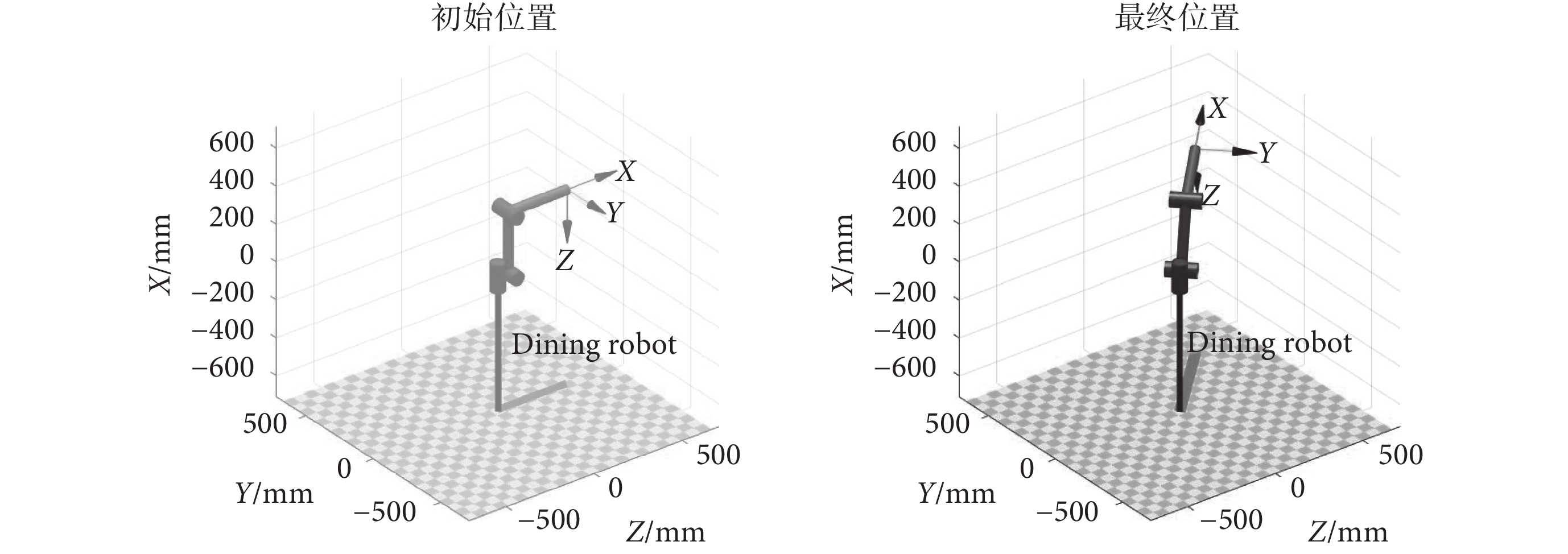 圖9
初始和最終空間位置
Figure9.
Initial and final spatial positions
圖9
初始和最終空間位置
Figure9.
Initial and final spatial positions
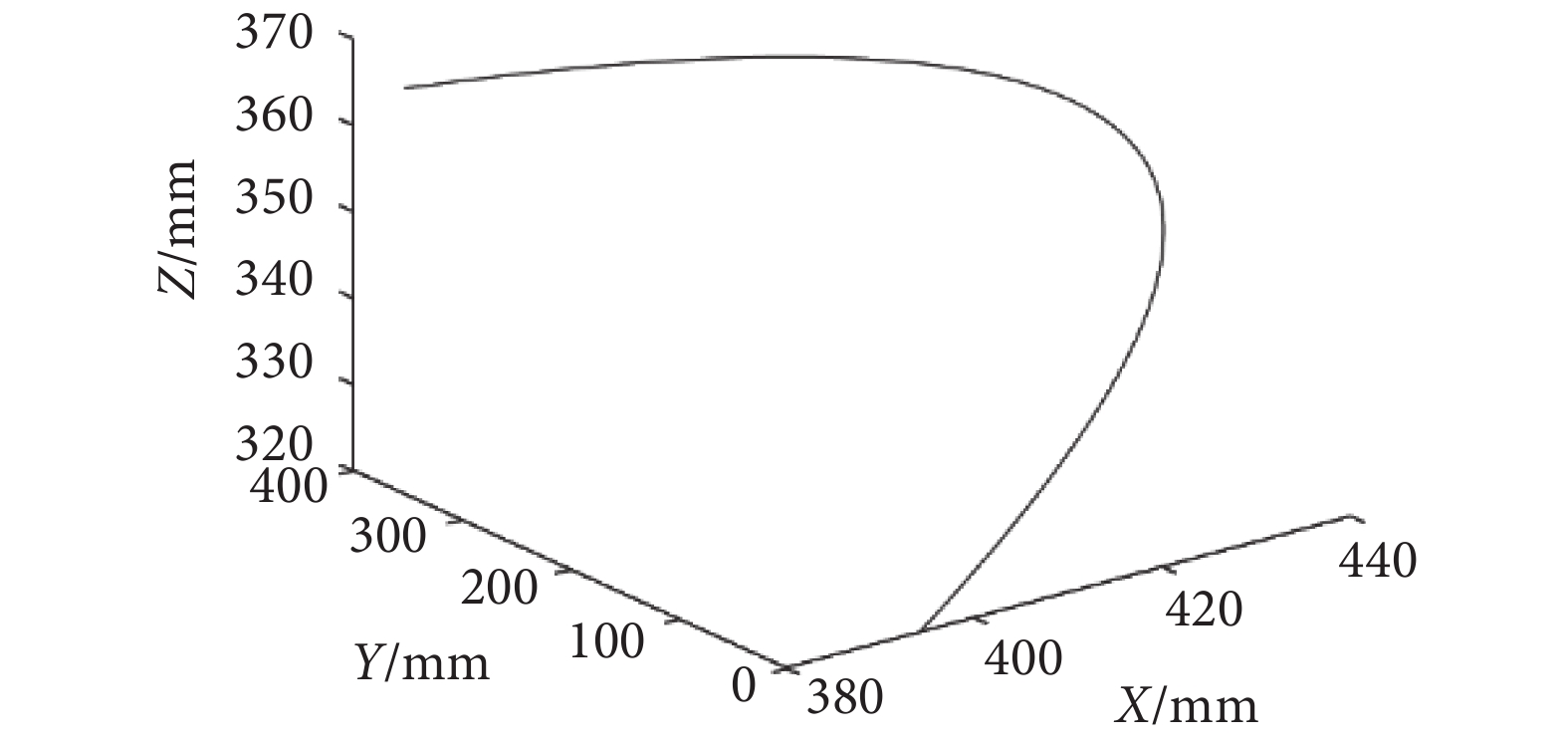
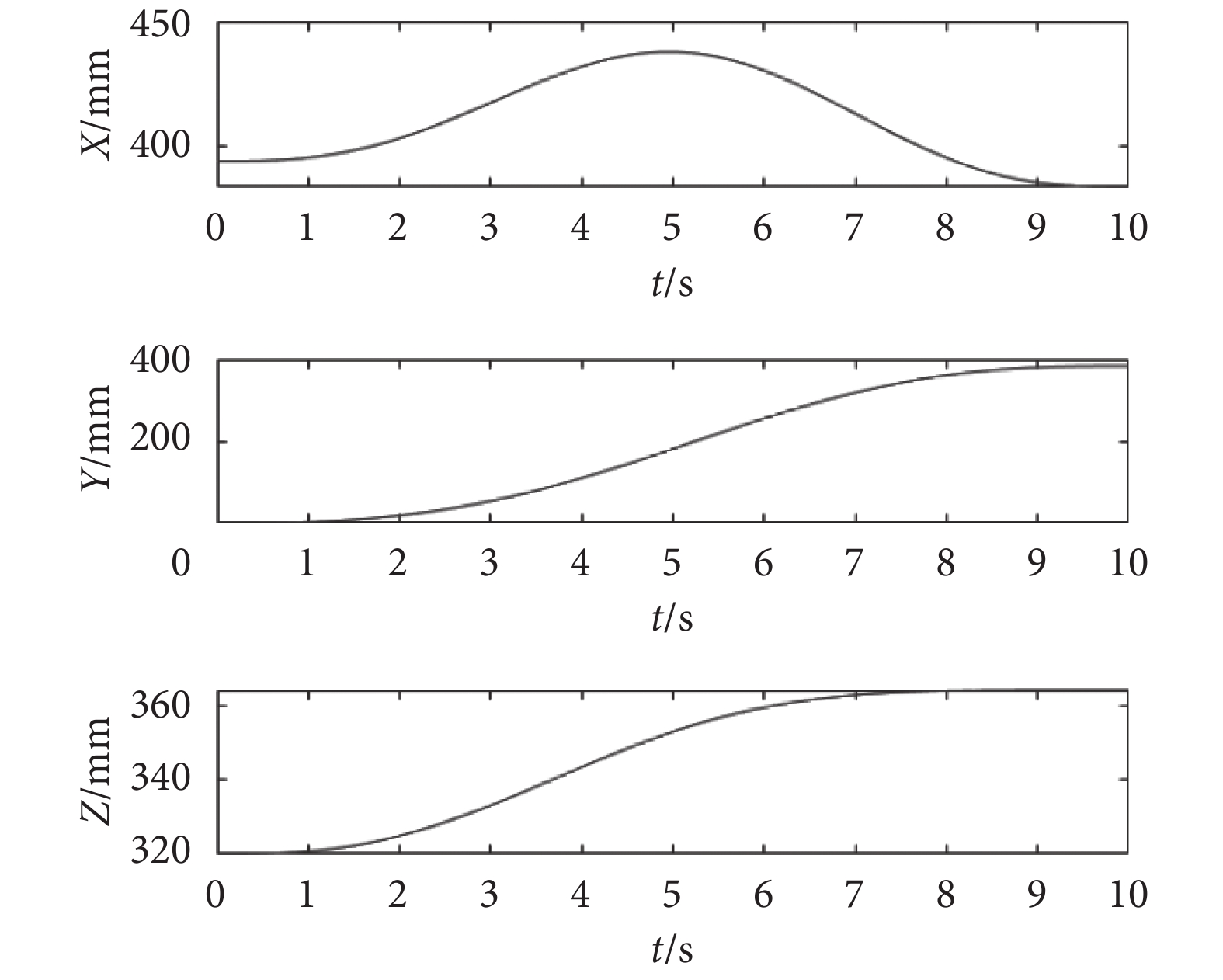
輔助進餐機器人從初始關節角度運動至終止關節角度時,其末端在三維空間中的運動軌跡如圖10所示,運動軌跡在X/Y/Z各平面內的運動變化情況如圖11所示,各關節的位置、速度和加速度變化情況如圖12所示。從圖10和圖11觀察可得,輔助進餐機器人在該指定行程范圍內,運動曲線平滑。從圖12可觀察到輔助進餐機器人的關節1、關節2和關節3隨時間的角位置變化、角速度變化和角加速度變化情況,同時說明在此運行過程中關節2和關節3的運行過程是基本一致的。
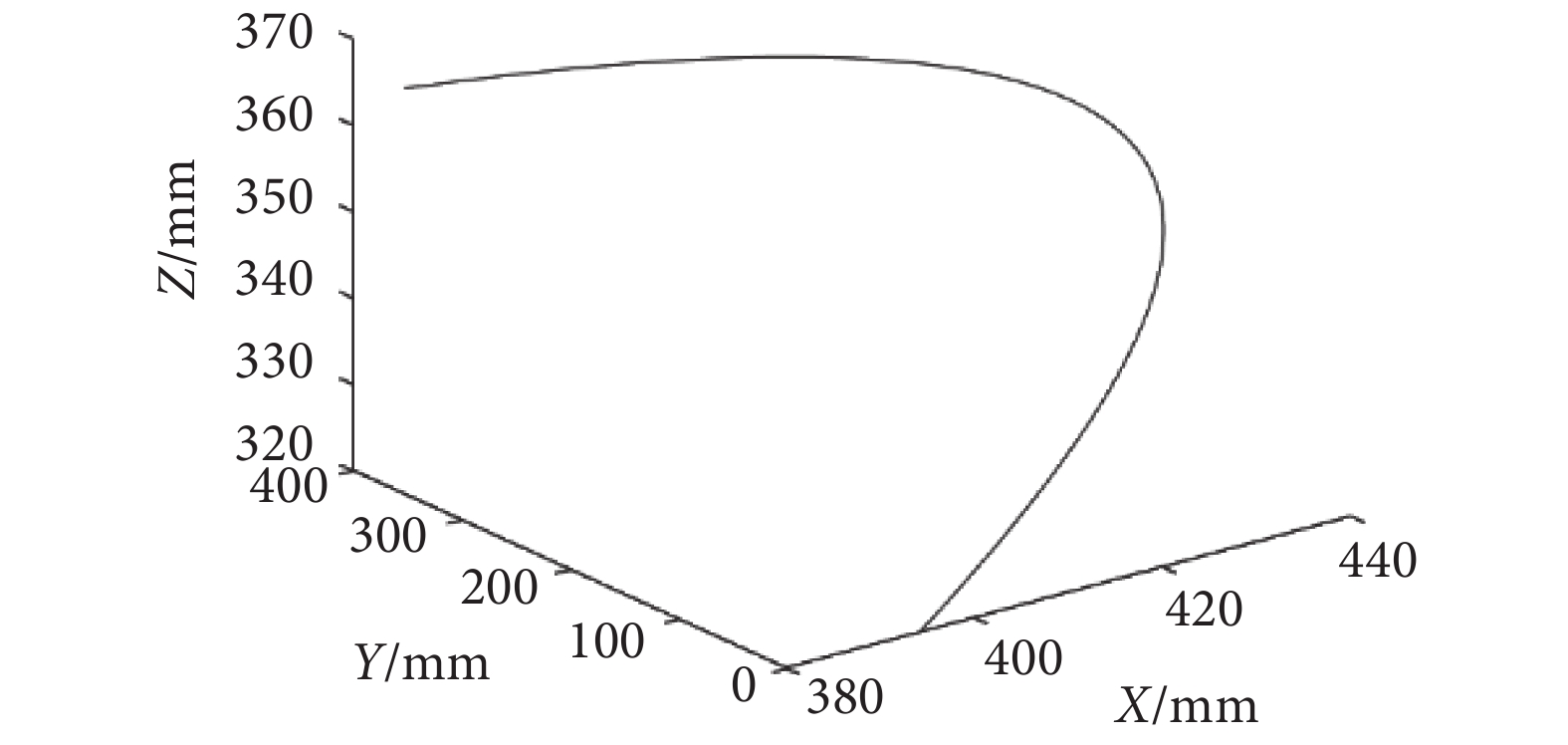 圖10
輔助進餐機器人末端空間運動軌跡
Figure10.
Space trajectory of the dining robot end-effector
圖10
輔助進餐機器人末端空間運動軌跡
Figure10.
Space trajectory of the dining robot end-effector
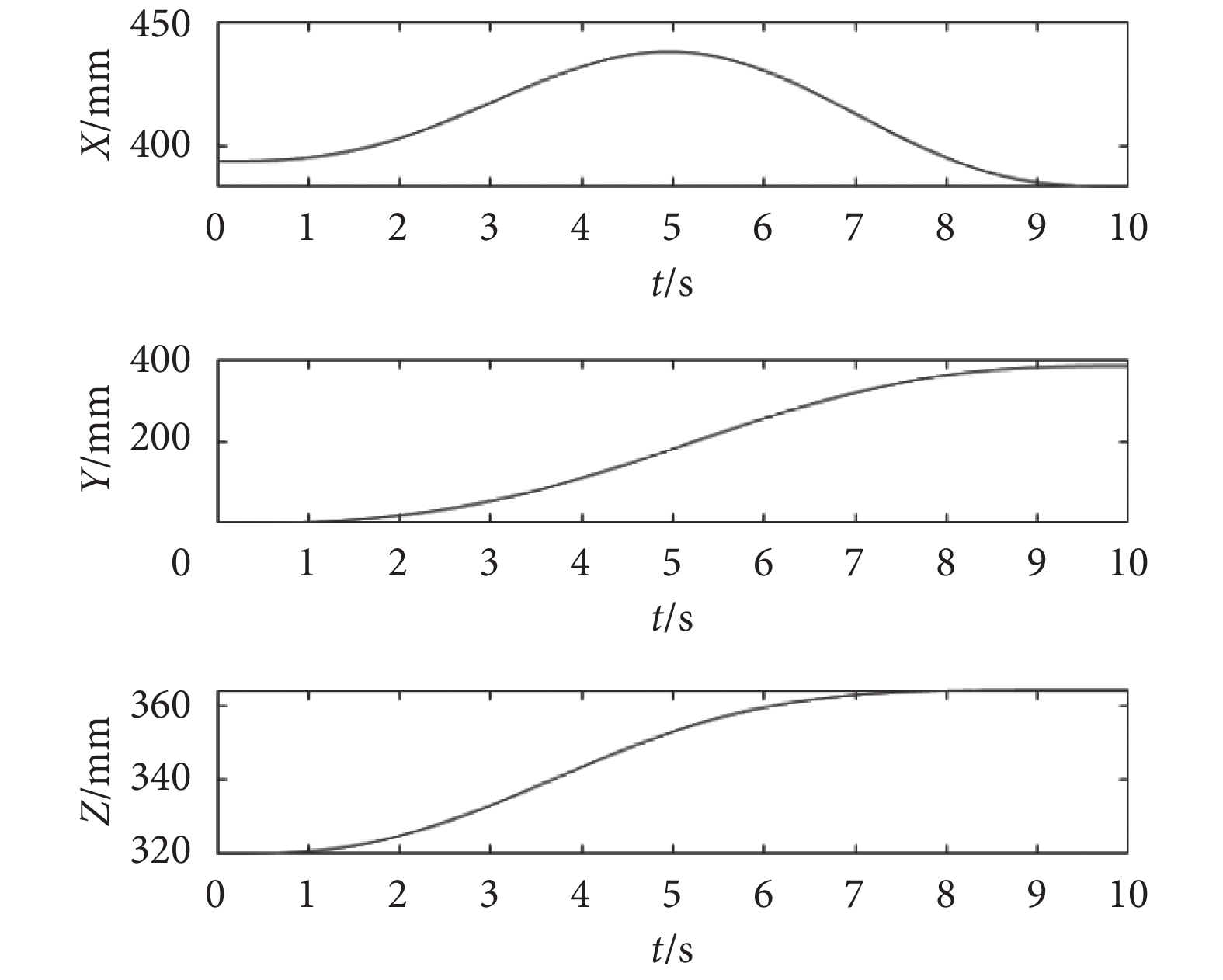 圖11
X/Y/Z各平面內的運動變化
Figure11.
Motion in X/Y/Z plane
圖11
X/Y/Z各平面內的運動變化
Figure11.
Motion in X/Y/Z plane
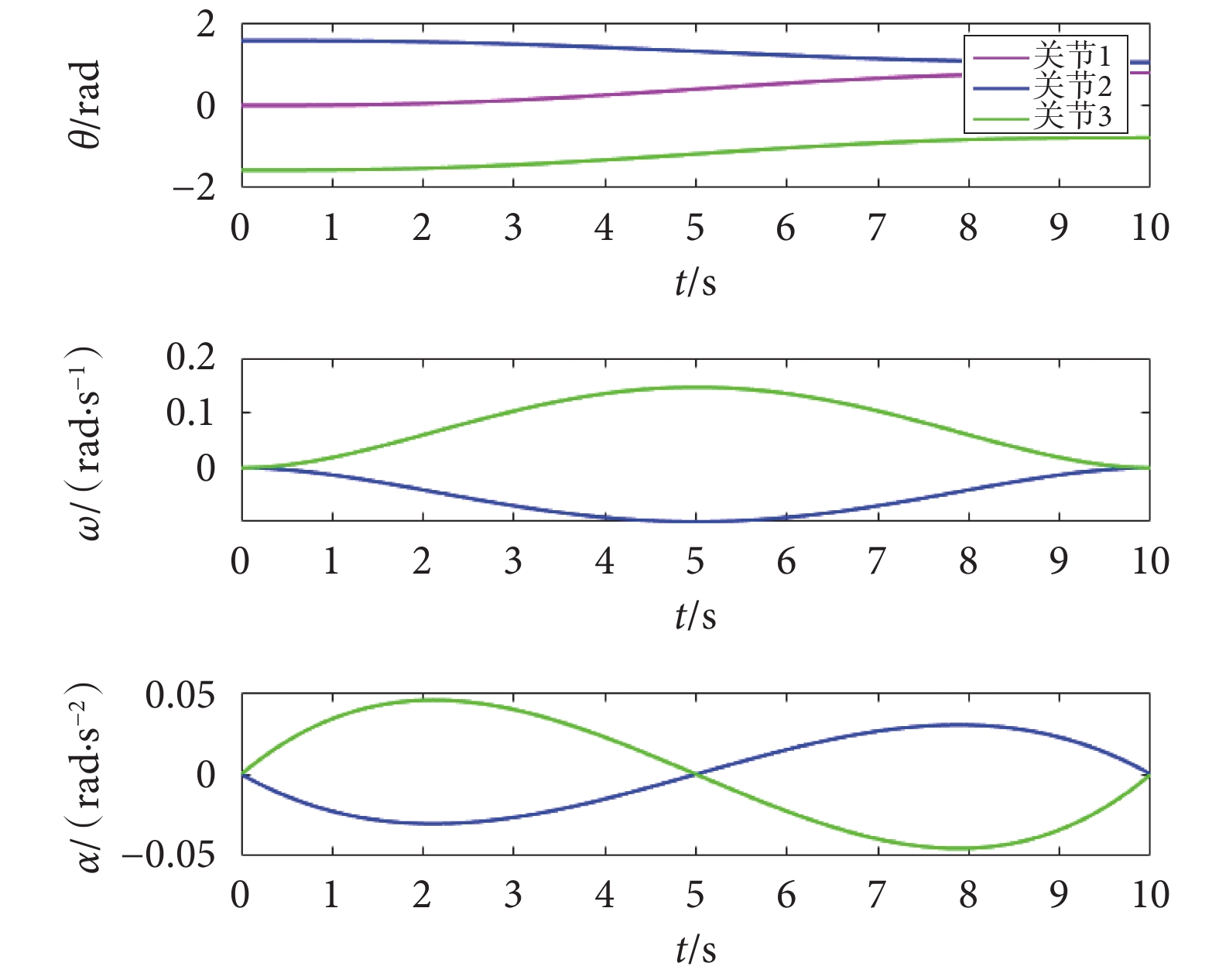 圖12
各關節的位置/速度/加速度變化
Figure12.
Variation of position/velocity/acceleration of each joint
圖12
各關節的位置/速度/加速度變化
Figure12.
Variation of position/velocity/acceleration of each joint
3 輔助進餐機器人工作空間分析與場景應用討論
考慮到輔助進餐機器人需完成特定輔助進餐任務,對其具體工作空間進行求解,針對實際應用場景進行總體說明。
3.1 輔助進餐機器人工作空間分析
采用Matlab中的機器人工具箱對機械臂實際工作空間求解,分析比較機械臂末端可達范圍[22-23]。本部分分析常規工作空間和特定區域工作空間,連桿回轉角角度范圍見表3。
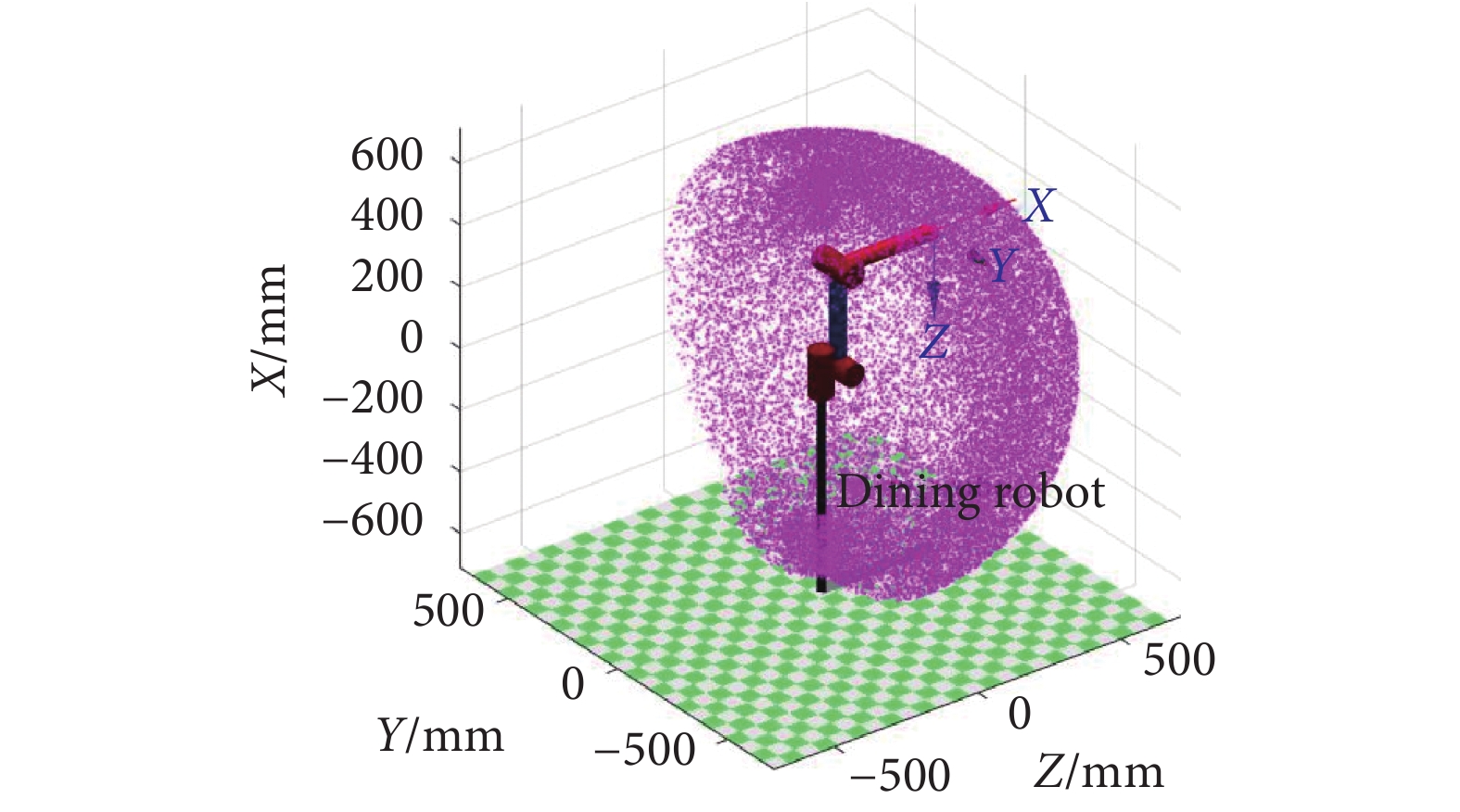
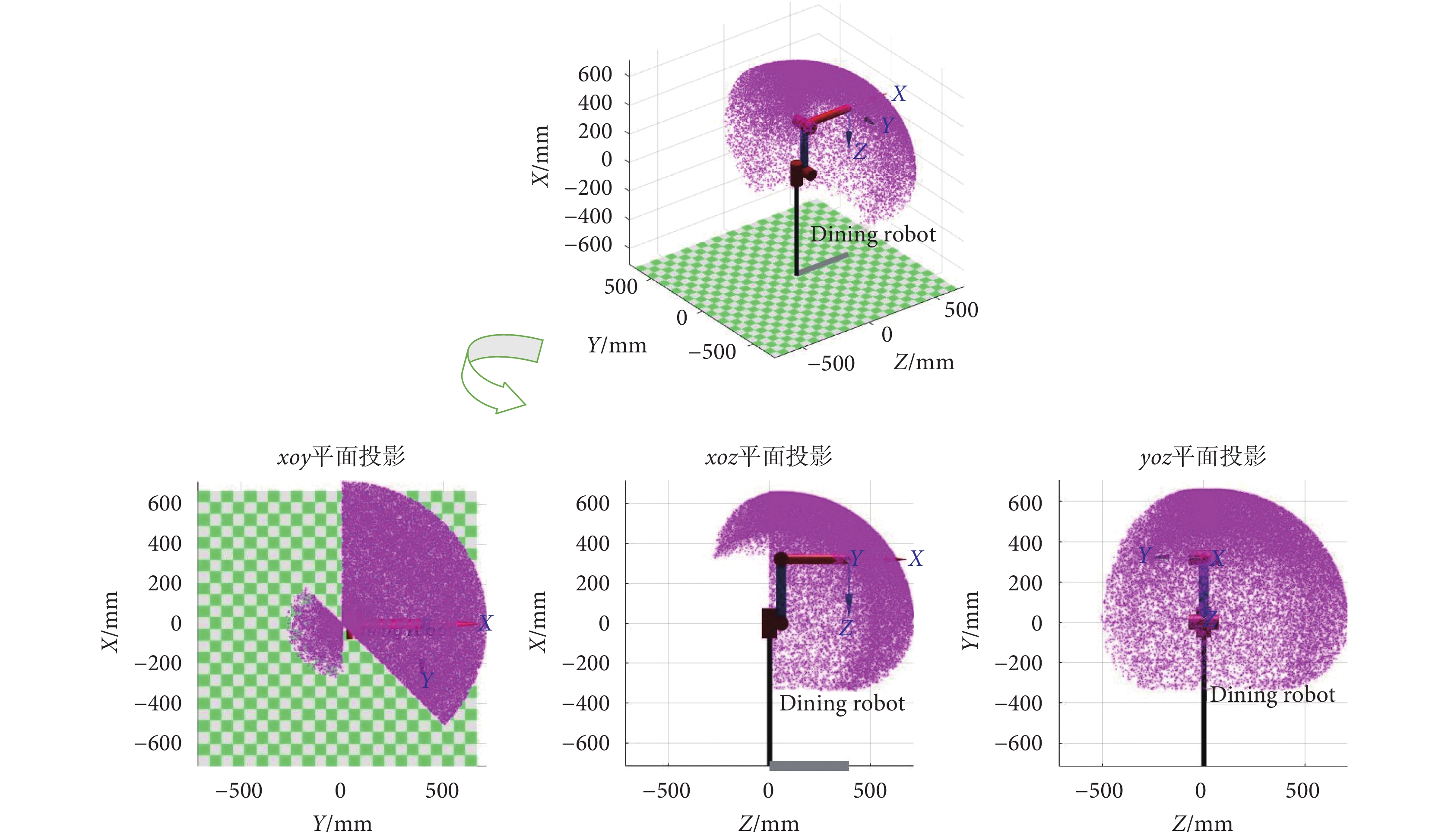
機械臂運動常規可達范圍如圖13所示。考慮該機械臂特定工作任務,結合圖6所示,其運動軌跡和工作空間集中于患者身體上方位附近,此特定范圍內的工作空間和各平面內投影如圖14所示。比較分析得到此特定范圍內工作空間符合機械臂運動可達位置,各投影面圖形分布無明顯空洞,能夠清晰地體現其工作區域。
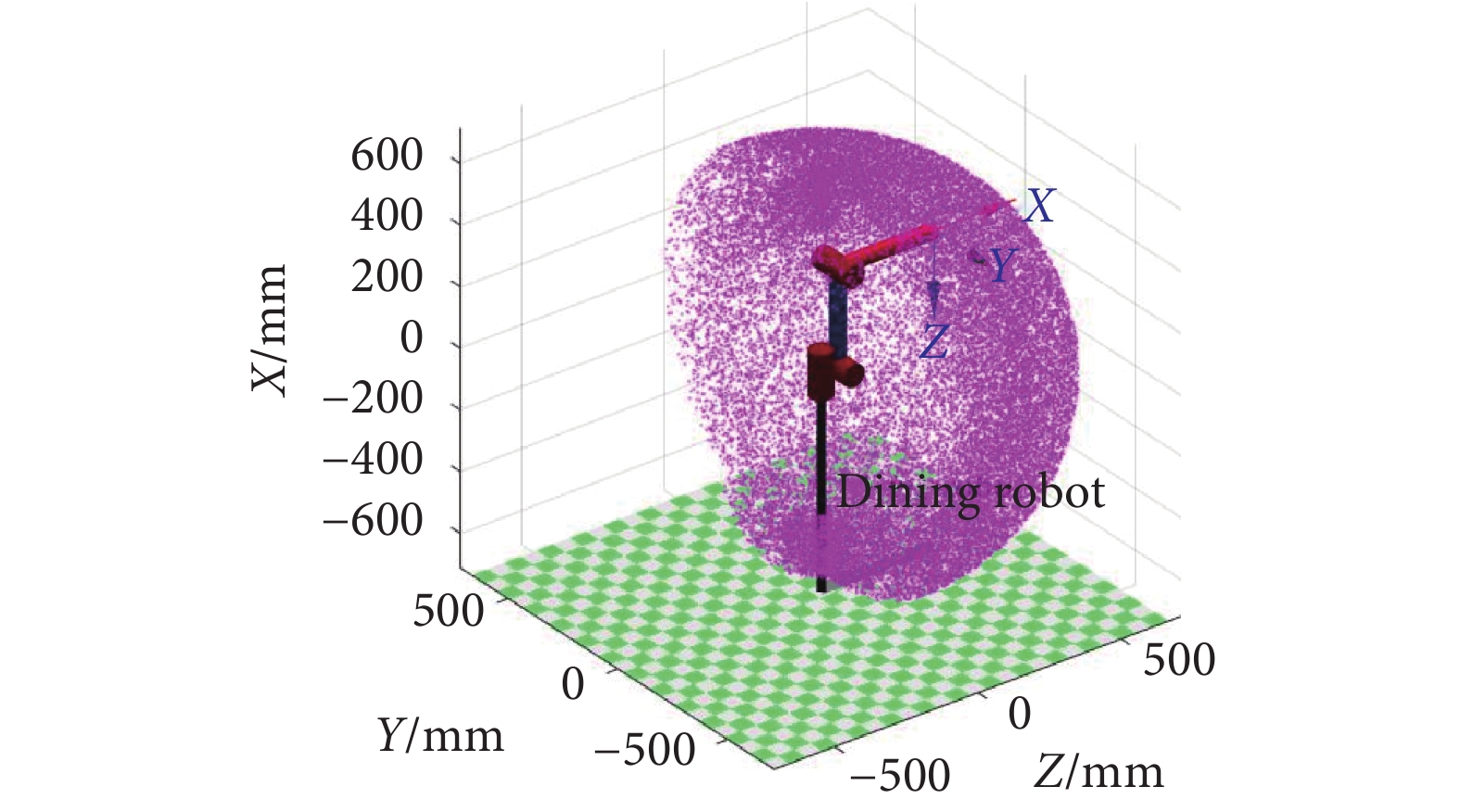 圖13
常規三維工作空間
Figure13.
Regular 3D workspace
圖13
常規三維工作空間
Figure13.
Regular 3D workspace
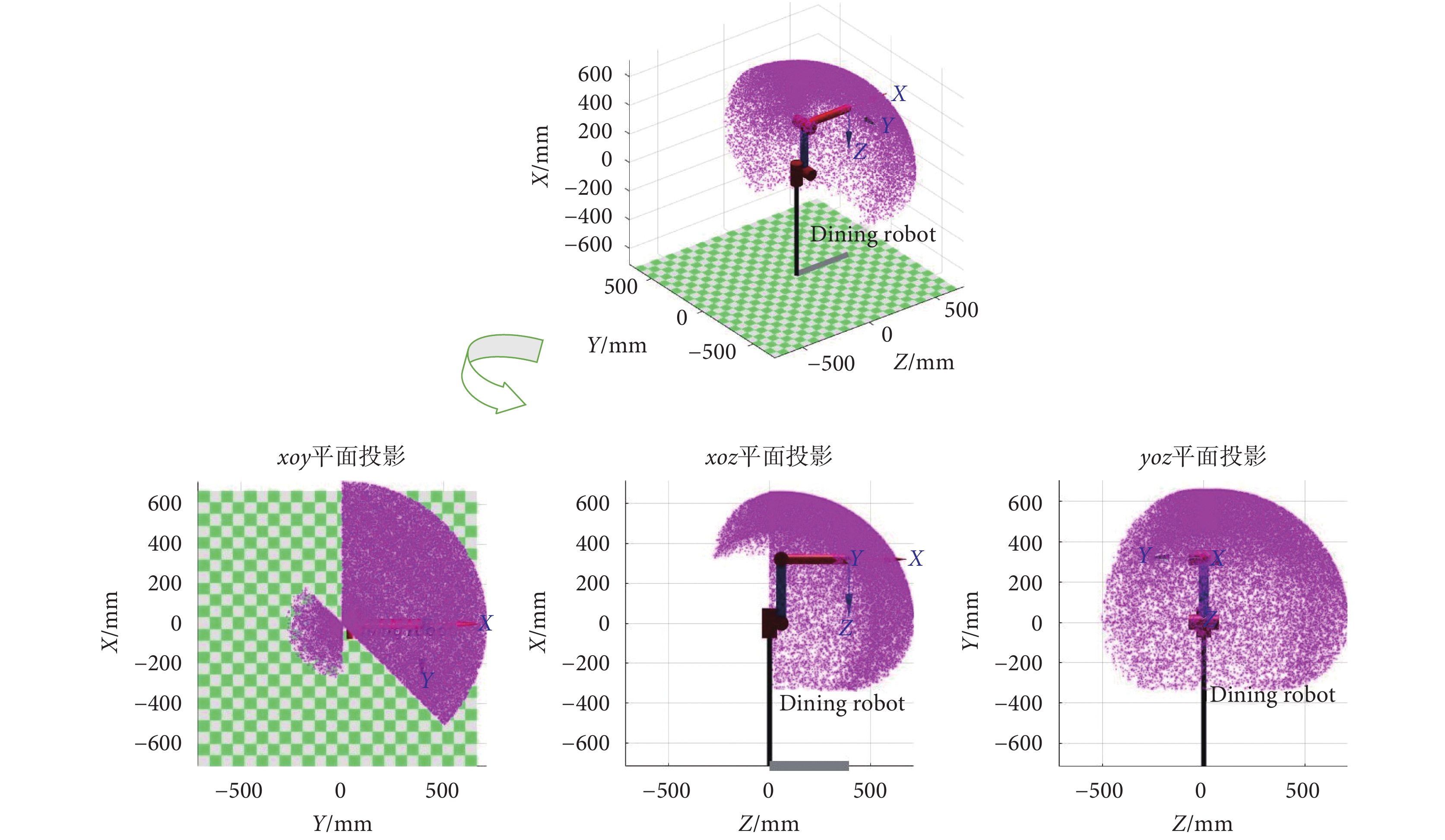 圖14
特定三維工作空間
Figure14.
Specific 3D workspace
圖14
特定三維工作空間
Figure14.
Specific 3D workspace
3.2 場景應用討論
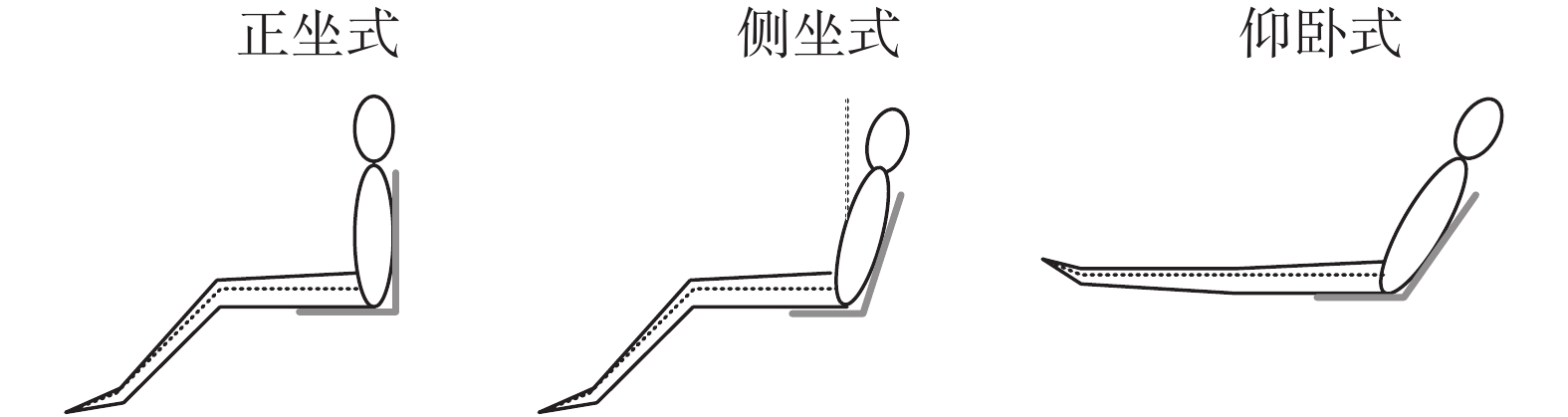
綜合輔助進餐機器人的靜力學、運動學以及工作空間分析結果,本部分將模擬護理場景對輔助進餐機器人與被護理者的相對適宜位置進行說明。一般情況下,被護理者的常規位姿分為坐式與臥式,根據身體位置變換幅度不同,將其分為正坐式、側坐式及仰臥式三種類型,如圖15所示。
 圖15
被護理者基本位姿
Figure15.
Basic posture of care-needer
圖15
被護理者基本位姿
Figure15.
Basic posture of care-needer
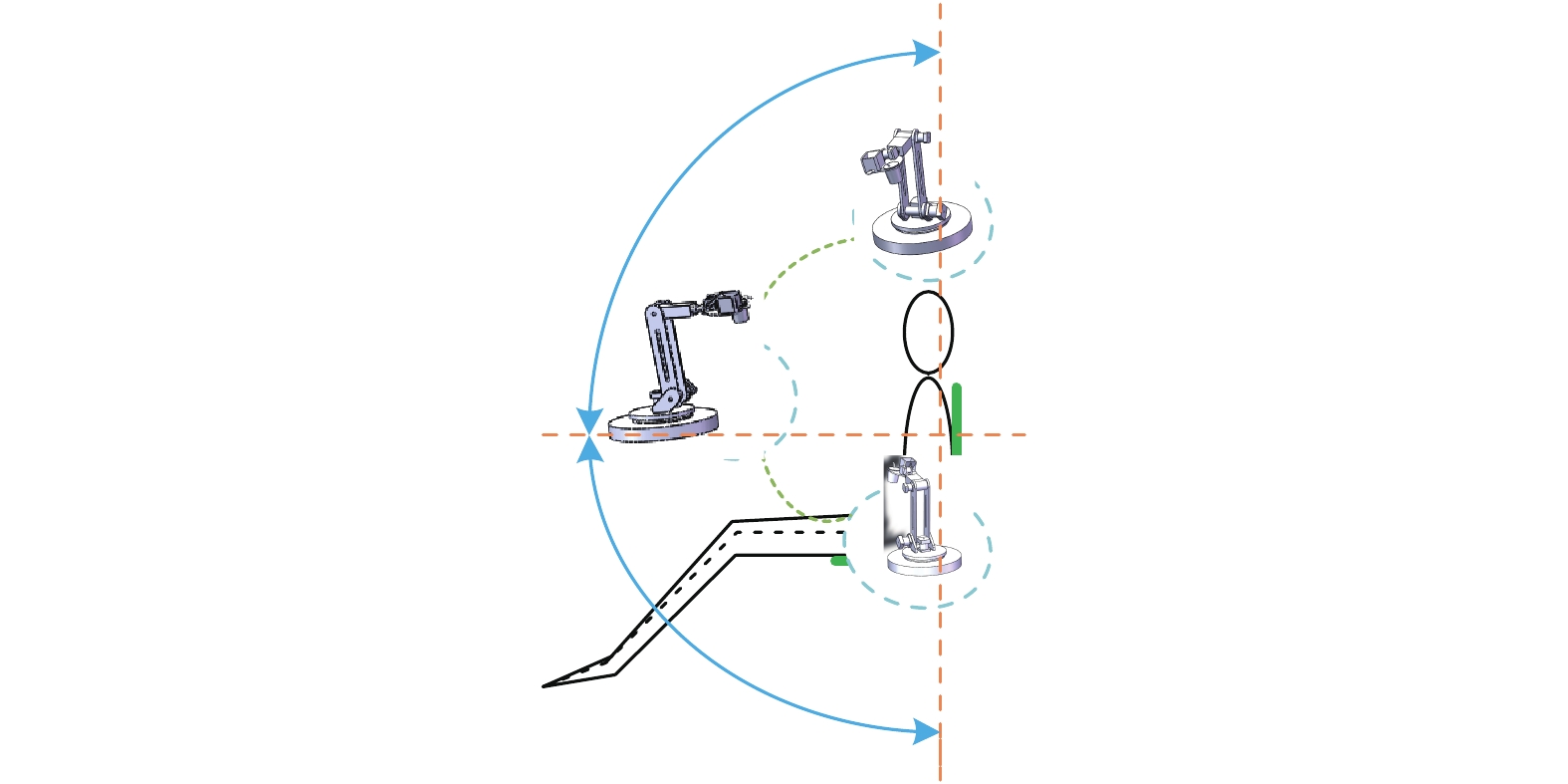
輔助進餐機器人靜力學分析結果表明其配置滿足工作時的靜力強度要求。運動分析結果體現出輔助進餐機器人末端的空間運動軌跡平滑,各關節速度變化均勻穩定,完成喂食任務所需的特定工作空間可以到達。進一步地,輔助護理機器人與被護理者的相對位置如圖16所示。
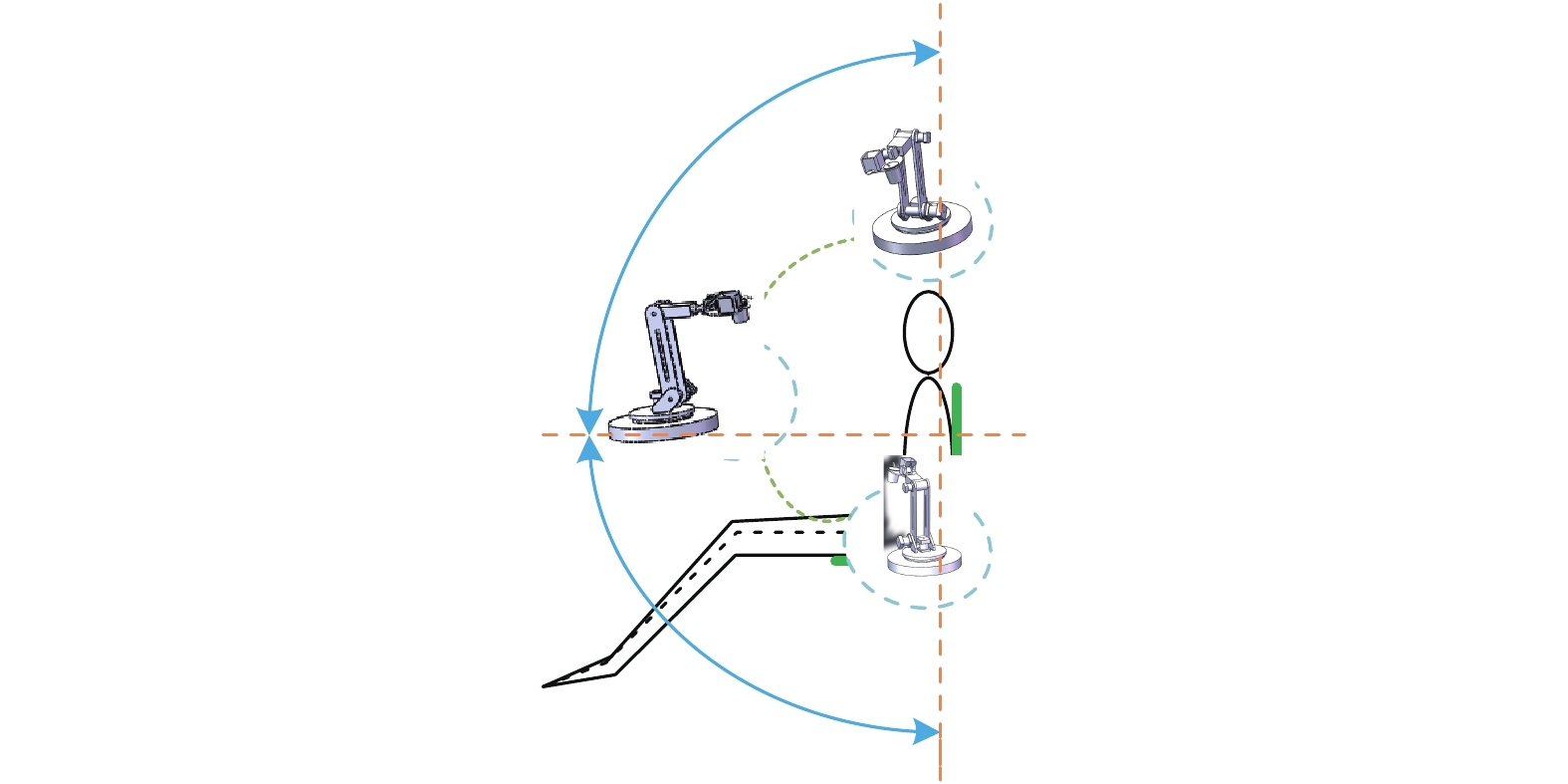 圖16
輔助進餐機器人與被護理者的相對位置
Figure16.
Relative position of the dining robot to the care-needer
圖16
輔助進餐機器人與被護理者的相對位置
Figure16.
Relative position of the dining robot to the care-needer
被護理者基本位姿以正坐式為例,根據本文所提出的輔助護理機器人構型及運動特征,輔助護理機器人與被護理者的相對位置可分為正對位置和側方位置。依照人們日常進食習慣,被護理者為正坐式位姿時較適用于正對位置,即圖16中正對于被護理者的前方位置。被護理者位姿為側坐式和仰臥式時,可選用正對于被護理者的前方位置向左向或右向偏移的位置,但偏移角度以不超過90°為宜,即圖16中最大偏移位置以不超出被護理者左向或右向平齊位置為佳,具體所選位置可根據喂食習慣和護理裝置所在空間位置自由確定。
4 結論
本文結合TRIZ理論設計了一款輔助進餐機器人,采用往復運動構件等效常規助餐機器人末端所使用的旋轉勺體實現仿人喂食功能,同時具備喂食和喂水功能,具備低自由度配置下滿足工作空間上的運動靈活性。在此條件下確定輔助進餐機器人的結構,分析其機構受力情況,進一步分析說明其特定三維工作空間,完成運動仿真驗證。本文為服務類輔助進餐機器人的新型設計和部分工作性能指標提供基本參考,并為后期輔助進餐機器人的結構優化和整機研制提供理論參考。
重要聲明
利益沖突聲明:本文全體作者均聲明不存在利益沖突。
作者貢獻聲明:李抒桐提出該文設計構想,完成分析仿真和論文撰寫,并統籌修改內容;肖金壯對設計內容進行補充,指導文章寫作;孟恭完成文中輔助進餐機器人運動學分析和相應圖表的繪制;史小爍提供人體上方位機體信息,為人機交互部分提供參照;管練武撰寫摘要并完成場景應用部分討論;王焱檢索整理引言部分文獻及文稿檢查工作。
引言
來自《世界人口展望:2019年修訂版》的數據顯示,到2050年全世界每6人中就有1人年齡在65歲以上,占比16%,而2019年該占比為9%。此現狀表明了全球人口正步入老齡化階段,世界上幾乎每個國家的老齡人口數量和比例均在增加[1]。老年人口快速增加,特別是80歲以上的高齡老人和部分失能老人的數量,這部分群體對醫療及養老服務的需求日益增長。此外,腦卒中及肌肉萎縮病變患者會出現肢體運動功能不健全的特征,因病導致身體羸弱,以上群體也將增加對醫療護理服務的深度依賴[2-3]。隨著患者數量逐漸增多,既要護理人員配備合理,又需保證護理服務的質量,使得護理人員的工作任務和負荷隨之加重。護理服務中的喂食任務屬于必需且重復的工作內容,輔助進餐機器人作為護理服務裝置中的一類,可以輔助患者自主完成進食,一定程度上可將護理人員從繁重而重復的體力勞動中解放出來。
輔助進餐機器人涉及機構學、力學、控制及仿生學等多學科技術的綜合。20世紀80年代初期荷蘭和法國學者首先對具備助餐功能的機器人進行了研究,研發了RSI服務機械手和MANUS服務機器人,它們具備助餐功能但并不專用于實現助餐[4-5]。英國Mike Topping公司研發的Handy1和其二型服務機器人通過開關控制重復送喂過程實現助餐功能[6]。日本Secom公司研發的My Spoon機器人通過使用者控制操縱桿實現機器人勺子自動在四個小餐盤中舀取食物并送到人嘴邊進行喂食[7]。美國Desin機器人公司2018年推出一款名為Obi的智能喂飯機器人,它配有一個安裝湯匙的機械臂,機械臂具有360°旋轉和上下伸展功能,通過兩個按鈕執行喂飯操作,其中一個按鈕控制手臂在四個碗槽中來回切換。Obi通過教學模式準確找到患者的嘴部,即按下教學(Teach)按鈕,調整到適當的高度后,Obi在喂飯過程中會記住該位置,如此往復實現喂食[8]。同年澳大利亞推出了一款喂飯服務機器人,人們將它系在腰上,機械手可以上下移動,用餐時人們稍微挪動頭部實現進食[9]。國內對助餐機器人的研究始于2006年以“康復與愛心”為主題的設計大賽。廣東工業大學研發的助餐機器人無電機驅動,通過患者腳部運動實現進餐和翻書功能;海軍工程大學研發的助餐機器人的餐臺可旋轉,通過腳踏按鈕能夠輪流取到所有餐盤內的食物,由于具有一個自由度僅能完成特定環境的簡單進餐;哈爾濱工程大學研發的MY TABLE系列助餐機器人通過腳踏實現對餐盤中的食物進行選餐和進食[10-12]。
綜合分析國內外已有的助餐機器人類型,基本構型多為仿人式機械手臂且末端搭載勺體,通過各關節旋轉運動實現勺體從餐盤到患者嘴部的仿人軌跡式移動過程,以形成近似仿人喂食操作。該類助餐機器人通常由機械結構、傳感系統、驅動系統和控制系統組成來實現助餐,仿人式分別體現在其結構形態和功能用途上。結構仿人化實現喂食,即機械臂運動帶動末端勺體轉動形成仿人式喂食操作。因機器人自身的結構特性所限,通常機器人自由度數目越多,仿人運動程度越高,靈活性越好,但相應結構更復雜,控制和調試難度也將增加,故輔助進餐機器人結構應在滿足最低自由度配置下兼具空間上的運動靈活性。鑒于此,本文采用發明問題解決理論(theory of inventive problem solving,TRIZ)設計了一款由執行機構、驅動部分、檢測部分組成的輔助進餐機器人。
1 輔助進餐機器人的功能分析與結構設計
輔助進餐機器人執行輔助進食任務時,包含與被護理者間的交互過程,因此,從與被護理者間的相對位置關系出發來確立輔助進餐機器人的基本輪廓尺寸,從其具體功能用途出發進一步確立各部分結構尺寸。通過TRIZ理論的因果鏈分析法對輔助進餐機器人的需求必要性進行分析說明,結合發明原理中的分割、局部質量、合并、普遍性及周期性動作原理進行輔助設計,最終形成該款輔助進餐機器人整機構型。
1.1 TRIZ分析法
采用TRIZ理論八大技術系統進化法則中的減少人工介入進化法則實現機器動作代替人工操作,提出輔助進餐機器人基本架構[13]。在喂食和喂水功能需求分析的基礎上,通過TRIZ理論的因果鏈分析得出喂水功能方案設計,如圖1所示。
圖1
喂水功能因果鏈分析
Figure1.
Causal chain analysis of water feeding function
通過因果鏈分析得到所存在的問題:111、112、211、231、311。初步分析可知問題111和231是客觀存在的,因此通過解決其他存在的問題作為技術方案。
方案一為112,即專業護理人員全天候陪護,但此方式需花費大量時間與人力,實現成本較高,尤其在全球人口老齡化程度加劇情況下,不屬于可持續采用優選方案;方案二為211,即研發一種新的喂水工具,喂水過程中不會產生灑溢等現象,然而湯匙和吸管作為喂水常用工具已使用多年,短期內實現具有難度;方案三為22,即患者術后或臥床療養期間會伴有悲傷、焦躁等消極情緒,此時一方面需要患者親友的開導與陪伴,另一方面則需患者的自身疏導,需要時間來緩慢調理;方案四為311,即設計一種能夠自動實現喂水功能的裝置,達到輔助患者完成飲水的目標,并保證裝置靈活精巧,讓患者使用時無壓力。經初期分析,方案四所包含的設計一種能夠自動實現喂水功能的裝置是目前解決患者水分補給量不足這一問題的較可行方案。
1.2 輔助進餐機器人的結構設計
本文設計的輔助進餐機器人考慮模擬仿人喂食方式實現自主喂飯喂水功能。該設計滿足TRIZ理論中減少人工介入的進化法則,其末端采用往復運動構件等效常規助餐機器人末端所使用的旋轉勺體來實現喂食功能。常規助餐機器人需要勺體在餐盤與患者嘴部進行往復旋轉運動,所喂餐食需為固體類,喂食湯水類容易灑溢,本文設計的輔助進餐機器人可同時實現喂食和喂水功能。
結合TRIZ理論發明原理中的分割原理,將物體分割為獨立的部分并使物體成為可組合的,將喂食和喂水功能分開分析,將執行機構前端和末端分別處理。局部質量原理和合并原理體現于執行機構末端喂食模塊的設計,使物體的每一部分處于最有利于其運行的條件下,不同部分實現不同功能,并且合并空間上的同類或相鄰物體。普遍性原理體現于輔助進餐機器人能夠同時實現喂食和喂水功能,用以代替護理人員繁重而重復的工作。
整個機械結構裝置包括底座、大臂、小臂及末端操作器,由肩關節、肘關節、腕關節串聯而成。要求機器人可以輔助使用者實現喂飯喂水的雙重操作,并滿足結構合理緊湊、質量輕、靈活度高、穩定性強、驅動及傳動部分噪聲低、環保無害材質等條件,滿足最低限度下的自由度配置的要求。
1.2.1 人機相對位置關系分析
工作模式下的輔助進餐機器人與被護理者間的位置基本處于被護理者呈坐立姿勢或坐臥姿勢,輔助護理機器人位于被護理者正前方位置或側方位置[14]。根據現代人體尺寸數據,得出現代人體呈坐姿時各部位尺寸與人體身高關系,其中人體坐姿測量簡圖如圖2所示,人體坐姿基本尺寸與身高比例對照關系如表1所示。
圖2
人體坐姿測量示意圖
Figure2.
Measurement of human sitting size
人體坐姿測量簡圖中以人體大腿部與座椅接觸處為分界線,量測自其向上至肘部、肩部、脊椎部、眼部和頭頂部的距離,以及坐姿狀態時腿高、坐深及至下方位的距離。根據《中國居民營養與慢性病狀況報告(2020年)》顯示,我國居民體格發育與營養不足問題持續改善,城鄉差異逐步縮小,一方面體現在居民的平均身高持續增長,我國18~44歲的男性和女性平均身高分別為169.7 cm和158.0 cm,與2015年相比分別增加1.2 cm和0.8 cm[15]。據此將人體身高基本尺寸選取為169.7 cm,以男性身高作為基準,當輔助護理機器人與男性被護理者相對位置為可達時,對應各部位尺寸略小的女性被護理者則必然可達。由人體坐姿基本尺寸與身高比例關系計算得到人體各部位基本尺寸,同時分析人機相對位置關系,依據人體測量學和人機工程學統計數據,結合輔助進餐機器人的功能特點初步確立輔助進餐機器人輪廓尺寸,如圖3所示。
圖3
人機相對位置
Figure3.
Relative position between human and dinning robot
坐姿狀態時人體坐姿眼高為79.7 cm,坐姿脊椎點高為68.9 cm,坐高為90.9 cm。輔助進餐機器人處于伸展狀態時,其三連桿加末端模塊總長為72.5 cm,處于人體坐姿眼高與坐姿脊椎點高之間。輔助進餐機器人一般工作到達位置是被護理者嘴部,因此無論輔助進餐機器人底座置于座椅分界處平齊位置,還是置于一般餐桌所處位置,即被護理者前胸處正前方或側方位置,其執行機構末端均可到達被護理者嘴部位置。末端喂食模塊長度為16.0 cm,正面面對被護理者時的寬度為15.0 cm,餐食盒寬度為7.0 cm,飲品杯直徑為6.4 cm。餐食盒與飲品杯中心距約為7.0 cm,且餐勺與吸管處于平齊位置,被護理者頭部微微傾轉即可獲取到餐食與飲品。因此該尺寸配置下的輔助進餐機器人可實現助餐功能。
1.2.2 喂食模塊設計
喂食模塊置于輔助進餐機器人末端,與使用者嘴部相互交互,模擬仿人喂食動作中的固定旋轉飯勺和俯仰喂水過程。機器人完全模仿人手喂食動作過程需配置多自由度,此時末端操作器控制將變得復雜,因此本文中采用等效功能替換方式設計喂食模塊。
末端操作器設計為并聯在一起的吸取式喂水部分和伸縮式喂飯部分,通過間歇循環的方式進行喂食。如術后或身體虛弱者需進食流食或半流食,可直接在喂水區域放置相應載食杯,通過吸管吸食。若能夠進食時蔬飯類,配好比例放入餐食盒處,通過電機驅動連桿帶動勺體進行伸縮往復運動實現喂食,此部分采用TRIZ理論中周期性動作原理,用周期性動作代替連續動作。喂食模塊和喂飯機構原理如圖4所示,其中包含喂飯模塊初始階段,即復位階段,勺體運動過程中期階段,以及勺體伸出階段,即送喂狀態。
圖4
喂食模塊
Figure4.
Feeding module
1.2.3 整機結構設計
輔助進餐機器人設計可視為機械臂和末端操作器的設計,即喂食模塊和整機機構的設計。綜合考慮輔助進餐機器人的動作位姿及對軌跡的要求,選用關節型機器人,因為關節型機器人具有工作范圍大、靈活性好、避障能力強等特點。本文設計的喂水喂飯機器人共包括七個部分:底座、肩關節、大臂、肘關節、小臂、腕關節、喂食模塊。總體機械臂傳動機構包括4個自由度,分別為:肩部回轉、大臂俯仰、小臂俯仰、腕部回轉。
整個機械結構裝置由底座、大臂、小臂以及末端操作器構成,通過回轉關節、肘關節、腕關節串聯而成。有足夠的活動范圍,滿足最低自由度設計,同時實現所需功能,如圖5所示。底座連接肩部,承擔著整個系統的重量,底座中央則是肩部回轉的動力源,此形式結構緊湊,節約空間。
圖5
整機機構
Figure5.
Mechanical structure
按照攝像機安裝位置的不同,一般可以分為眼在手上(eye in hand)和眼在手外(eye to hand)。眼在手上安裝方式可以實現精確控制,但對系統的標定誤差和機器人的運動誤差敏感。眼在手外的安裝方式對機器人的運動誤差不敏感,可同時觀測到目標與執行機構末端位置,但該方式易引起目標遮擋或丟失[16-17]。綜合分析輔助護理機器人的應用場合,考慮到減少攝像頭安裝、定位和傳輸數據的布線帶來的繁瑣問題,采用了眼在手上的攝像頭安裝方式。同時考慮到機器人末端需配置喂飯喂水系統,將攝像機安裝于執行機構末端偏上位置,以固定的相對位置安裝,如圖6所示。
圖6
安裝配置圖
Figure6.
Installation configuration diagram
2 輔助進餐機器人的靜力學與運動學分析
為進一步分析輔助進餐機器人的結構特征,對其加載外部載荷進行靜力學分析,采用改進D-H法建立機械臂關節坐標系。
2.1 輔助進餐機器人的靜力學分析
為確保輔助進餐機器人具有足夠的強度和剛度,對其進行靜力學校核[18-20]。應用Solidworks中的simulation模塊,機器人所承負載主要來自喂食模塊。輔助進餐機器人各零部件采用6061鋁合金,通過施加約束和載荷、選定接觸類型和劃分網格進行分析,考慮到喂食模塊主要由支撐板承重,因此分析時將載荷直接加載于支撐板上,如圖7所示。
圖7
加載外部載荷
Figure7.
Applying external load
靜力學分析中各零部件間忽略間隙接觸,應力、應變和位移變化情況如圖7所示。結果中的最大位移來自負載和自重,滿足輔助進餐機器人工作要求的末端誤差設為0.5 mm。結果中的最大形變位移為0.116 mm,機器人的結構剛度滿足要求。結果中工作時承載的最大應力為21.55 MPa,安全系數約為2.6,滿足靜力學強度要求。
2.2 輔助進餐機器人運動學分析
輔助進餐機器人實施送喂任務時,通過各關節運動實現末端喂食模塊的位姿變化,末端喂食模塊的活動范圍是衡量其工作能力的重要指標,本部分主要從幾何角度分析輔助進餐機器人的運動特性,即運動學分析[21]。
該款輔助進餐機器人屬于4自由度旋轉關節仿人機械手,研究其運動學問題時,將末端喂食模塊視作和小臂固連的桿件。因末端旋轉關節的轉動對末端可達范圍無影響,因此工作空間分析時忽略末端旋轉關節,原結構可等效為三自由度機械臂。根據改進D-H法建立機械臂關節坐標系如圖8所示,確定連桿的D-H參數如表2所示。相鄰兩個坐標系間的齊次變換矩陣表示如下:
圖8
連桿坐標系
Figure8.
Link coordinate system
|
將確定的D-H參數代入,求得從機械臂基座到末端的齊次變換矩陣 :
|
|
|
|
|
式中,。以上通過輔助進餐機器人本體的幾何參數和關節變量求得末端喂食模塊相對于參考坐標系的位姿,以此建立其運動方程。
2.3 輔助進餐機器人運動分析與仿真
本部分采用關節空間軌跡規劃對所設計的輔助進餐機器人進行運動分析,關節空間軌跡規劃即指將輔助進餐機器人的關節變量變換成與時間的關系,對其角速度和角加速度進行約束。應用五次多項式插值方法,根據給定的初始和最終位置、速度、加速度和運動軌跡時間進行求解。將初始關節角度和終止關節角度分別設為(0, pi/2, ? pi/2)和(pi/4, pi/3, ? pi/4),如圖9所示。
圖9
初始和最終空間位置
Figure9.
Initial and final spatial positions
輔助進餐機器人從初始關節角度運動至終止關節角度時,其末端在三維空間中的運動軌跡如圖10所示,運動軌跡在X/Y/Z各平面內的運動變化情況如圖11所示,各關節的位置、速度和加速度變化情況如圖12所示。從圖10和圖11觀察可得,輔助進餐機器人在該指定行程范圍內,運動曲線平滑。從圖12可觀察到輔助進餐機器人的關節1、關節2和關節3隨時間的角位置變化、角速度變化和角加速度變化情況,同時說明在此運行過程中關節2和關節3的運行過程是基本一致的。
圖10
輔助進餐機器人末端空間運動軌跡
Figure10.
Space trajectory of the dining robot end-effector
圖11
X/Y/Z各平面內的運動變化
Figure11.
Motion in X/Y/Z plane
圖12
各關節的位置/速度/加速度變化
Figure12.
Variation of position/velocity/acceleration of each joint
3 輔助進餐機器人工作空間分析與場景應用討論
考慮到輔助進餐機器人需完成特定輔助進餐任務,對其具體工作空間進行求解,針對實際應用場景進行總體說明。
3.1 輔助進餐機器人工作空間分析
采用Matlab中的機器人工具箱對機械臂實際工作空間求解,分析比較機械臂末端可達范圍[22-23]。本部分分析常規工作空間和特定區域工作空間,連桿回轉角角度范圍見表3。
機械臂運動常規可達范圍如圖13所示。考慮該機械臂特定工作任務,結合圖6所示,其運動軌跡和工作空間集中于患者身體上方位附近,此特定范圍內的工作空間和各平面內投影如圖14所示。比較分析得到此特定范圍內工作空間符合機械臂運動可達位置,各投影面圖形分布無明顯空洞,能夠清晰地體現其工作區域。
圖13
常規三維工作空間
Figure13.
Regular 3D workspace
圖14
特定三維工作空間
Figure14.
Specific 3D workspace
3.2 場景應用討論
綜合輔助進餐機器人的靜力學、運動學以及工作空間分析結果,本部分將模擬護理場景對輔助進餐機器人與被護理者的相對適宜位置進行說明。一般情況下,被護理者的常規位姿分為坐式與臥式,根據身體位置變換幅度不同,將其分為正坐式、側坐式及仰臥式三種類型,如圖15所示。
圖15
被護理者基本位姿
Figure15.
Basic posture of care-needer
輔助進餐機器人靜力學分析結果表明其配置滿足工作時的靜力強度要求。運動分析結果體現出輔助進餐機器人末端的空間運動軌跡平滑,各關節速度變化均勻穩定,完成喂食任務所需的特定工作空間可以到達。進一步地,輔助護理機器人與被護理者的相對位置如圖16所示。
圖16
輔助進餐機器人與被護理者的相對位置
Figure16.
Relative position of the dining robot to the care-needer
被護理者基本位姿以正坐式為例,根據本文所提出的輔助護理機器人構型及運動特征,輔助護理機器人與被護理者的相對位置可分為正對位置和側方位置。依照人們日常進食習慣,被護理者為正坐式位姿時較適用于正對位置,即圖16中正對于被護理者的前方位置。被護理者位姿為側坐式和仰臥式時,可選用正對于被護理者的前方位置向左向或右向偏移的位置,但偏移角度以不超過90°為宜,即圖16中最大偏移位置以不超出被護理者左向或右向平齊位置為佳,具體所選位置可根據喂食習慣和護理裝置所在空間位置自由確定。
4 結論
本文結合TRIZ理論設計了一款輔助進餐機器人,采用往復運動構件等效常規助餐機器人末端所使用的旋轉勺體實現仿人喂食功能,同時具備喂食和喂水功能,具備低自由度配置下滿足工作空間上的運動靈活性。在此條件下確定輔助進餐機器人的結構,分析其機構受力情況,進一步分析說明其特定三維工作空間,完成運動仿真驗證。本文為服務類輔助進餐機器人的新型設計和部分工作性能指標提供基本參考,并為后期輔助進餐機器人的結構優化和整機研制提供理論參考。
重要聲明
利益沖突聲明:本文全體作者均聲明不存在利益沖突。
作者貢獻聲明:李抒桐提出該文設計構想,完成分析仿真和論文撰寫,并統籌修改內容;肖金壯對設計內容進行補充,指導文章寫作;孟恭完成文中輔助進餐機器人運動學分析和相應圖表的繪制;史小爍提供人體上方位機體信息,為人機交互部分提供參照;管練武撰寫摘要并完成場景應用部分討論;王焱檢索整理引言部分文獻及文稿檢查工作。