如何快速獲取具有復雜輪廓生物組織的光學參數圖像,是現有光學成像技術面臨的共同難題。本文提出并研制了一套融合輪廓信息的光學參數成像系統,首先采用傅里葉變換輪廓術獲取生物組織的輪廓信息,然后依據光照度定律矯正生物組織表面各點入射光強的差異,最后基于空間頻域成像原理獲取生物組織的光學參數圖像。實驗結果表明,成像系統能夠準確、快速獲取生物組織的輪廓信息和光學參數圖像。對于表面高度和角度分別在30 mm和40o以內的平板仿體,光學參數的最大成像誤差分別從輪廓矯正前的46.27%和72.18%降至輪廓矯正后的6.89%和10.26%。人臉仿體實驗和受試者腦前額葉成像試驗證明了本文成像系統具備獲取具有復雜輪廓生物組織圖像的臨床應用價值,同時本文提出的輪廓矯正方法或可與現有光學成像技術結合,減少生物組織表面輪廓對成像質量的影響。
引用本文: 李同心, 董葉青, 劉明, 趙靜, 李明慧, 李研哲. 融合輪廓信息的光學參數成像系統. 生物醫學工程學雜志, 2022, 39(2): 370-379, 389. doi: 10.7507/1001-5515.202106051 復制
版權信息: ?四川大學華西醫院華西期刊社《生物醫學工程學雜志》版權所有,未經授權不得轉載、改編
引言
光在生物組織中的傳播包含散射、折射、反射、吸收等眾多物理過程,對邊界光包含的方向和光強衰減等信息進行分析,便可通過相關的光學參數描述生物組織內部的光學特性。眾多光學參數中,吸收系數和散射系數與臨床診斷和治療存在直接定量關系,吸收系數能反推生物組織的血氧動力學參數(氧合血紅蛋白、還原血紅蛋白、氧飽和度),散射系數可反映生物組織的微觀結構,因此有效、快速獲取生物組織的吸收和散射系數圖像是采用光學方法進行疾病診斷和治療的基礎[1-2]。現有光學成像技術中,空間頻域(spatial frequency domain,SFD)成像技術因其能夠有效分離吸收和散射效應間的相互影響而受到了廣泛關注,該成像技術的原理為:三個不同初始相位(0,2/3π,4/3π)的寬場正弦光依次照射生物組織,使用面陣探測器捕捉生物組織表面的漫反射圖像;采用三步相移法對漫反射圖像空間逐點解調分離出直流(direct current,DC)和交流(alternating current,AC)分量的幅度圖像后,結合特定的光學傳輸模型逐點求逆獲取點對點的吸收和散射系數拓撲圖像[3-5]。由于SFD成像技術采用面源照射、面陣探測器采集的方式,因此其具有非接觸、成像速度快、成像視場大等優勢,這些優勢使得SFD成像技術在腦功能成像、皮膚燒傷檢測等領域得到了廣泛應用[6-9]。
現階段的SFD成像技術主要以平整組織(如皮膚)為研究對象,首先標定已知光學參數的平板仿體或已知漫反射率的漫反射板表面為基準平面,然后將寬場正弦光分別投影到基準平面和生物組織表面,并使用相機分別采集基準平面和生物組織表面的漫反射圖像,兩幅漫反射圖像的差分測量結果被用于定量重構生物組織的光學參數拓撲圖像。對于具有復雜輪廓的生物組織,投影到其表面的寬場正弦光將發生畸變,這不僅會降低生物組織表面漫反射圖像的空間解調精度,也會造成后續光學參數定量提取的誤差[3, 10]。為解決生物組織表面輪廓對光學參數定量重構的影響,近年來許多學者圍繞SFD成像技術提出了一些輪廓矯正方法,如校準矯正法、三維(3-dimension,3D)模型矯正法和適形投影矯正法等。其中,校準矯正法針對不同的SFD成像系統或實驗條件,通過改變基準平面的高度和角度,建立基準平面光強與高度、角度間的矯正數據庫,然后從數據庫擬合出基準平面光強與高度、角度間的映射關系后,逐點矯正生物組織表面漫反射圖像各點光強,該方法導致測量過程極其繁瑣和耗時[10]。3D模型矯正法需借助3D打印技術制作生物組織的3D模型,該方法增加了測量成本與時間,不適用于臨床[11]。適形投影矯正法在校準矯正法的基礎上,需提前獲取生物組織的輪廓信息,并建立寬場正弦光畸變產生的諧波與輪廓的關系,然后調整投影的寬場正弦光,消除畸變產生的諧波干擾,該方法提高了校準矯正法的矯正精度,但仍然存在測量過程耗時的問題[12]。鑒于現有輪廓矯正方法的復雜性和低效性,大多數SFD成像技術的研究者忽略了生物組織的輪廓對成像質量的影響,導致成像結果并不可靠。如何設計出一套高效簡易的輪廓矯正方法,并將其與SFD成像算法融合,準確及快速獲取具有復雜輪廓生物組織的光學參數圖像,是現有SFD成像技術面臨的難題。
針對上述問題,本文研制了一套融合輪廓信息的光學參數成像系統,首先將已知漫反射率的漫反射板表面標定為基準平面,分別采集基準平面和生物組織表面的漫反射圖像,然后使用傅里葉變換輪廓術(Fourier transform profilometry,FTP)獲取生物組織的輪廓信息,并根據光照度定律矯正生物組織表面漫反射圖像各點光強,最后基于SFD成像原理快速獲取生物組織光學參數圖像。與現有輪廓矯正方法相比,本文研制的成像系統僅采集基準平面和生物組織表面的兩幅漫反射圖像,然后根據光照度定律進行輪廓矯正,避免了矯正數據庫的建立以及生物組織3D模型的制作,以期簡化測量過程、減少測量時間和成本。此外,本文采用單次快照多頻解調(single snapshot multiple frequency demodulation,SSMD)方法對兩幅漫反射圖像包含的DC和AC分量進行空間解調,以便進一步提升SFD成像速度和降低三步相移法中的解調震蕩問題[13-14]。本文研制的成像系統有望為臨床準確、快速提供具有復雜輪廓生物組織的光學參數圖像,同時本文提出的輪廓矯正方法或可與現有光學成像技術結合,以期減少生物組織表面輪廓對成像質量的影響。
1 方法
1.1 成像系統
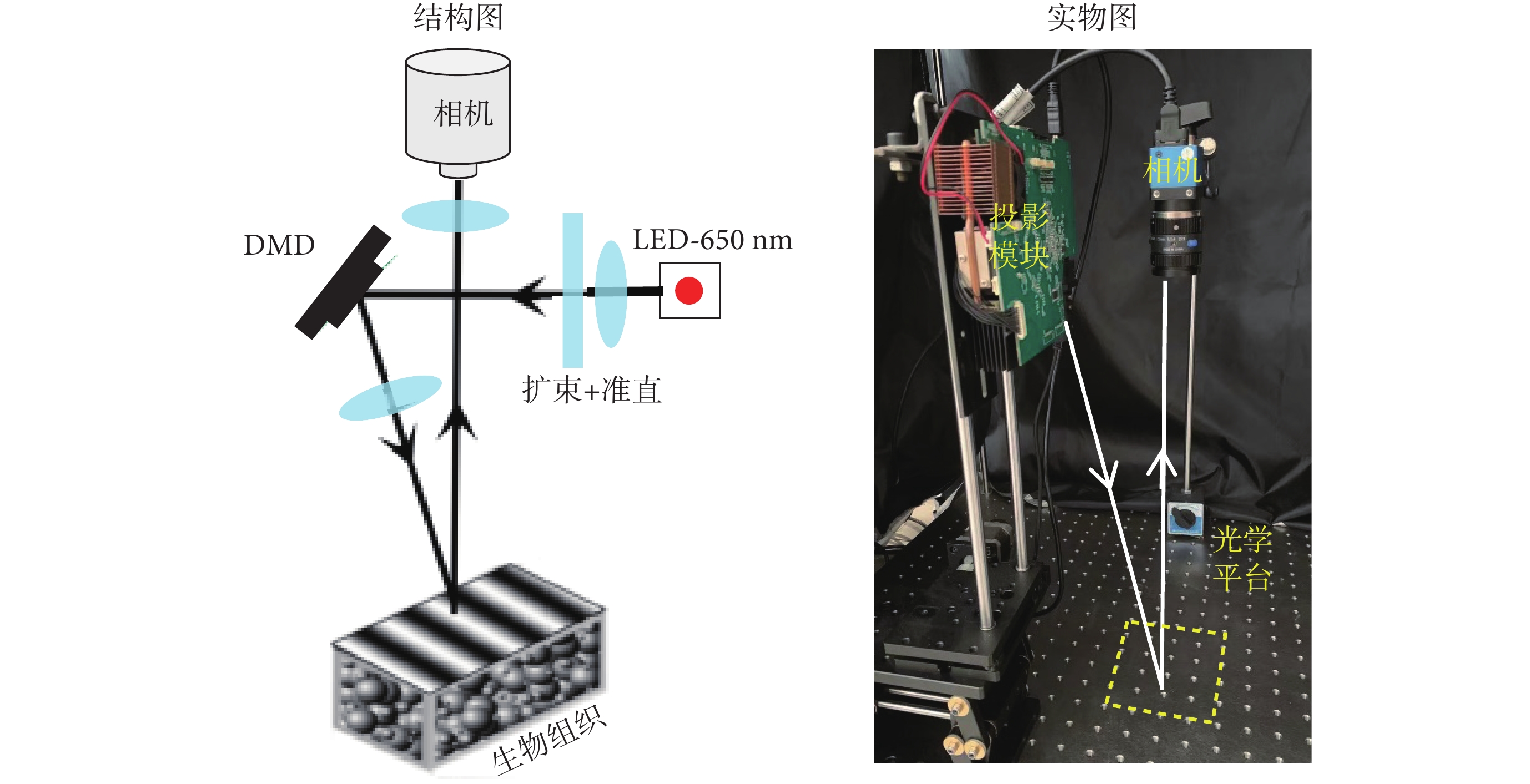
成像系統的結構圖和實物圖如圖1所示,所有模塊均由特定支架固定于光學平臺上。照射端將一個650 nm波長的發光二極管(light emitting diode,LED)光源(PT-39,流明納斯半導體器件有限公司,中國)擴束、準直后聚焦于數字微鏡器(digital micromirror device,DMD)(DLP-4500,Texas Instruments,美國)表面,DMD對光源空間調制,生成特定空間頻率的寬場正弦光分別照射生物組織和99%漫反射率的漫反射板(SRT-99-240,Labsphere Inc.,美國),擴束、準直透鏡、DMD和LED光源共同構成投影模塊。采集端由一個面陣相機(MER-500-7um,大恒圖像視覺有限公司,中國)捕捉生物組織和漫反射板表面的漫反射圖像,相機采集區域為5 cm × 5 cm,像素點個數為256 × 256。為減少鏡面反射光的影響,本文通過實際測量和調整投影模塊,將DMD輸出光軸與光學平臺法線間呈約4°夾角[15]。
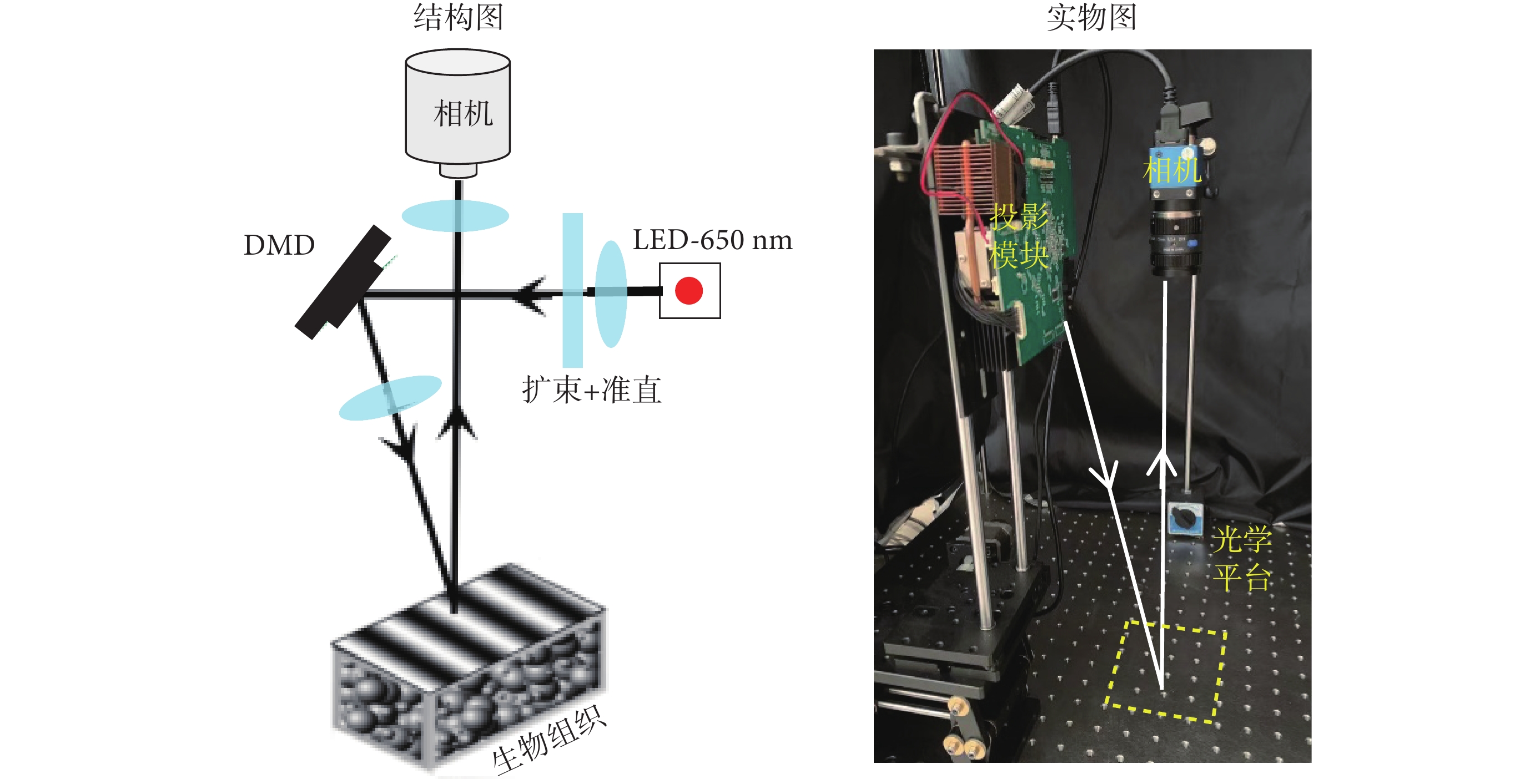 圖1
成像系統示意圖
Figure1.
Schematics of the imaging system
圖1
成像系統示意圖
Figure1.
Schematics of the imaging system
1.2 成像原理
成像系統的采集數據為生物組織和漫反射板表面的漫反射圖像,標定漫反射板表面為基準平面,成像步驟為:① 使用FTP獲取生物組織表面輪廓;② 采用SSMD方法解調出兩幅漫反射圖像的DC和AC幅度圖像;③ 利用生物組織的輪廓信息及光照度定律矯正生物組織表面及基準平面的DC和AC幅度圖像;④ 基于SFD成像原理獲取生物組織的光學參數(吸收和散射系數)拓撲圖像。
1.2.1 輪廓獲取
沿x方向調制的寬場正弦光分別投影到基準平面和生物組織表面時,相機采集的兩幅漫反射圖像  和
和  如式(1)和式(2)所示:
如式(1)和式(2)所示:
 |
 |
式(1)和式(2)中,(x, y)表示空間坐標; 和
和  分別表示
分別表示  的 DC和AC分量;
的 DC和AC分量; 和
和  分別表示
分別表示  的DC和AC分量;f0表示投影寬場正弦光的空間頻率;
的DC和AC分量;f0表示投影寬場正弦光的空間頻率; 和
和  分別表示
分別表示  和
和  的相位。
的相位。
生物組織的輪廓信息包含于  和
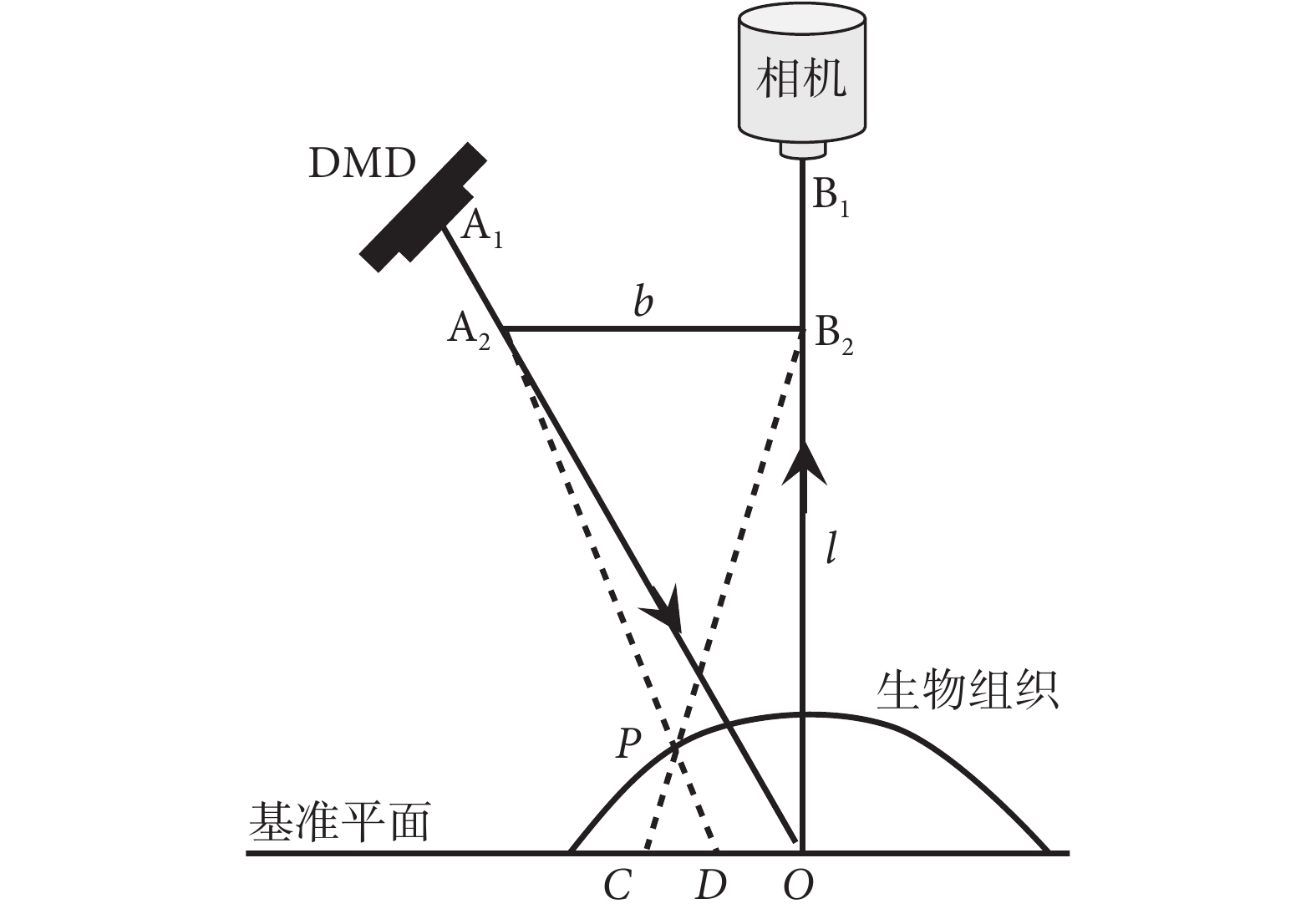
和  中,可通過FTP獲得。FTP的原理如圖2所示[16],A1和A2為DMD投影的入瞳和出瞳,B1和B2為相機的出瞳和入瞳,投影光軸和采集光軸相交于基準平面的O點,b為A2和B2間的距離,l為B2到基準平面的距離,C點是基準平面上某一點。DMD將寬場正弦光投影到基準平面時,C點相位為ΦC,它在相機陣列S點成像,相機陣列S點的相位ΦS滿足ΦS = ΦC。DMD將寬場正弦光投影在生物組織表面時,其表面P點在相機陣列S點成像,相機陣列S點的新相位ΦS’滿足ΦS’ = ΦP。而ΦP = ΦD,ΦD為基準平面D點的相位,可以看出相機陣列S點先后得到兩個相位ΦS與ΦS’的差值?Φ,正是由于P點相對于基準平面的高度h引起的。由于S點代表相機陣列任意點,可計算出相機陣列任意點的前后兩次相位差
中,可通過FTP獲得。FTP的原理如圖2所示[16],A1和A2為DMD投影的入瞳和出瞳,B1和B2為相機的出瞳和入瞳,投影光軸和采集光軸相交于基準平面的O點,b為A2和B2間的距離,l為B2到基準平面的距離,C點是基準平面上某一點。DMD將寬場正弦光投影到基準平面時,C點相位為ΦC,它在相機陣列S點成像,相機陣列S點的相位ΦS滿足ΦS = ΦC。DMD將寬場正弦光投影在生物組織表面時,其表面P點在相機陣列S點成像,相機陣列S點的新相位ΦS’滿足ΦS’ = ΦP。而ΦP = ΦD,ΦD為基準平面D點的相位,可以看出相機陣列S點先后得到兩個相位ΦS與ΦS’的差值?Φ,正是由于P點相對于基準平面的高度h引起的。由于S點代表相機陣列任意點,可計算出相機陣列任意點的前后兩次相位差  ,其中
,其中  表示圖2中C點和D點的距離。然后由圖2中的三角形A2PB2和三角形CPD相似可以得到生物組織的高度分布(輪廓)h(x, y),如式(3)所示:
表示圖2中C點和D點的距離。然后由圖2中的三角形A2PB2和三角形CPD相似可以得到生物組織的高度分布(輪廓)h(x, y),如式(3)所示:
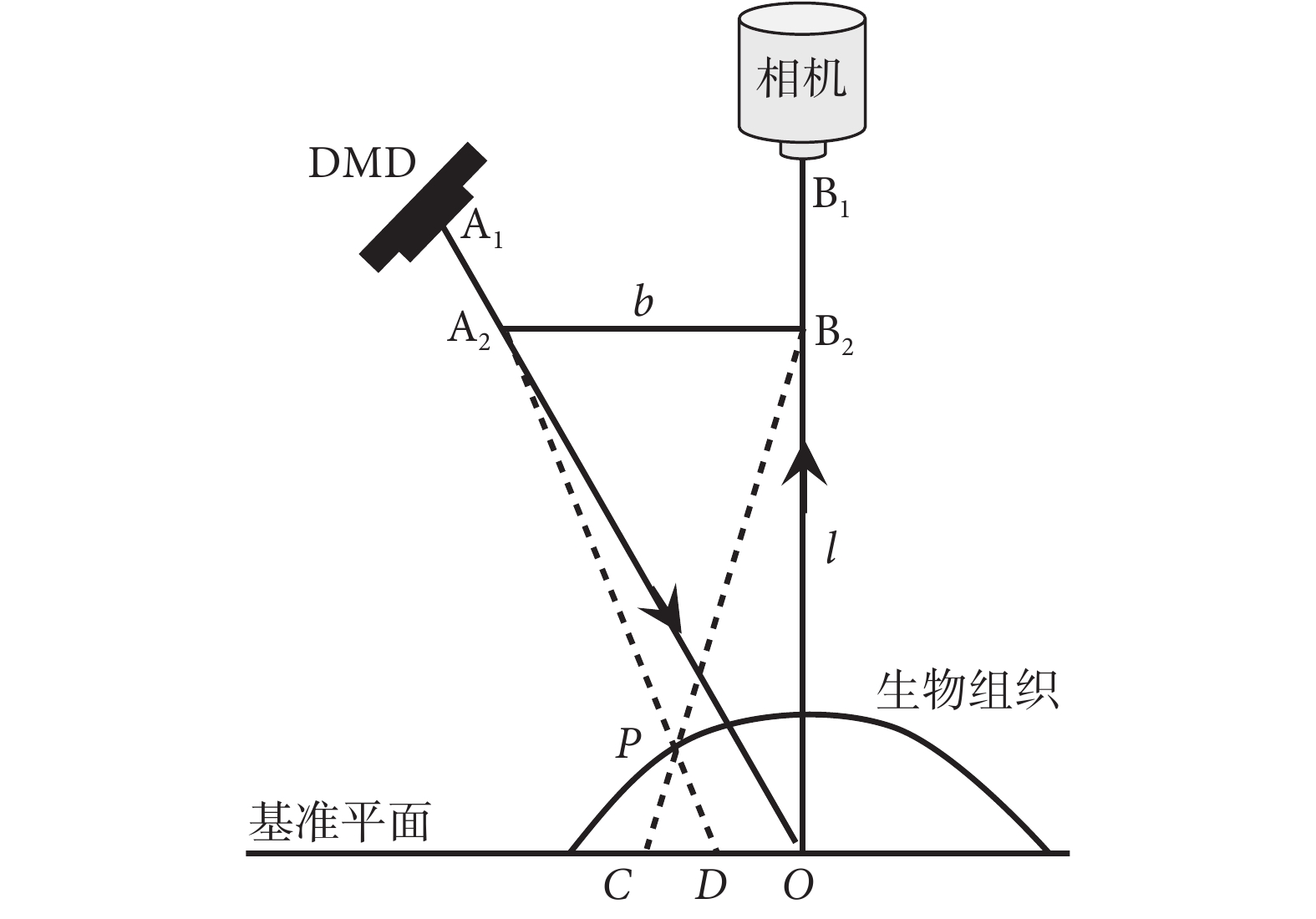 圖2
FTP原理圖
Figure2.
Principle of FTP
圖2
FTP原理圖
Figure2.
Principle of FTP
 |
可以看出,生物組織表面輪廓的測量轉化為  和
和  的測量。對式(1)和式(2)中的
的測量。對式(1)和式(2)中的  和
和  沿x方向逐行傅里葉變換,如式(4)和式(5)所示:
沿x方向逐行傅里葉變換,如式(4)和式(5)所示:
 |
 |
式(4)和式(5)中,fx表示頻譜函數; 、
、 和
和  分別為
分別為  、
、 和
和  的一維傅里葉頻譜,
的一維傅里葉頻譜, 為
為  的共軛函數;
的共軛函數; 、
、 和
和  分別為
分別為  、
、 和
和  的一維傅里葉頻譜,
的一維傅里葉頻譜, 為
為  的共軛函數;符號“*”表示共軛。
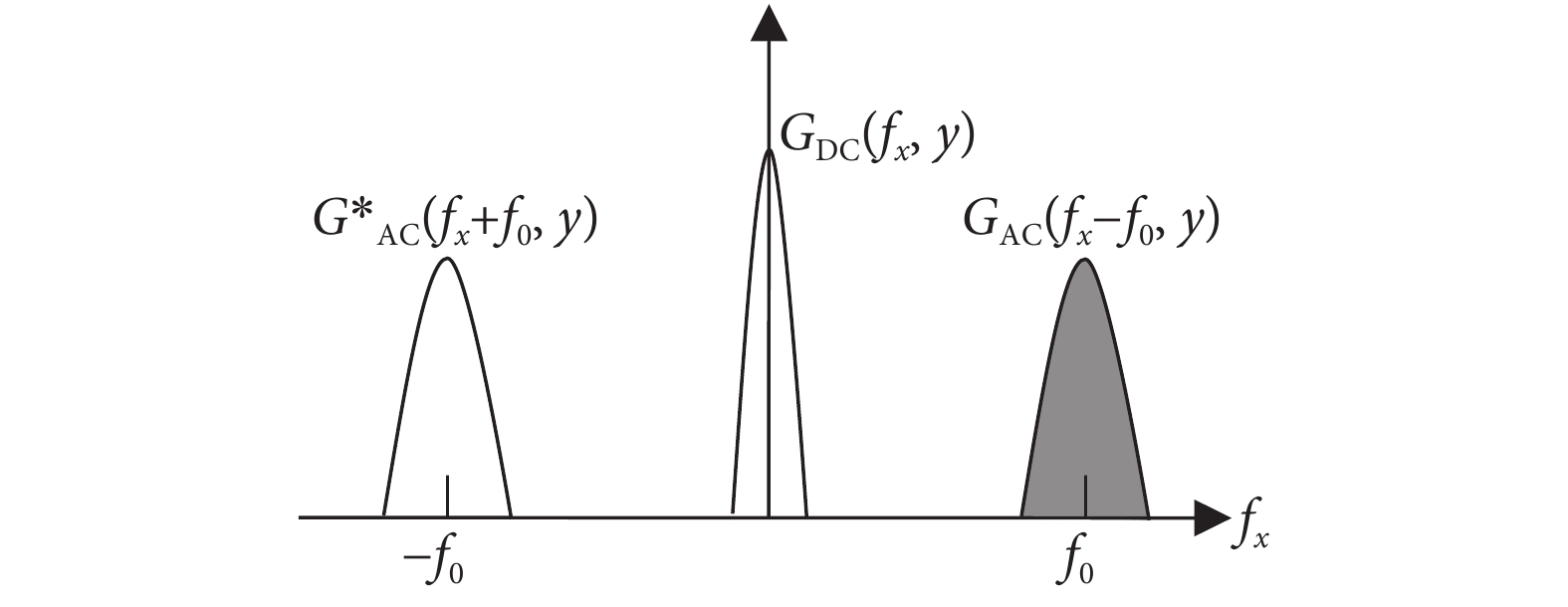
的共軛函數;符號“*”表示共軛。 的一維頻譜分布如圖3所示,陰影部分為基頻分量,包含了生物組織的輪廓信息。選用帶通濾波器提取
的一維頻譜分布如圖3所示,陰影部分為基頻分量,包含了生物組織的輪廓信息。選用帶通濾波器提取  的基頻分量后,頻移到坐標原點進行一維傅里葉逆變換,
的基頻分量后,頻移到坐標原點進行一維傅里葉逆變換, 可通過虛部與實部比值的反正切值得到[17]。對
可通過虛部與實部比值的反正切值得到[17]。對  做相同處理獲得
做相同處理獲得  后,使用質量圖引導法對
后,使用質量圖引導法對  和
和  解包裹獲得連續相位分布[18],將解包裹后的
解包裹獲得連續相位分布[18],將解包裹后的  和
和  代入式(3)即可獲得生物組織的輪廓信息。
代入式(3)即可獲得生物組織的輪廓信息。
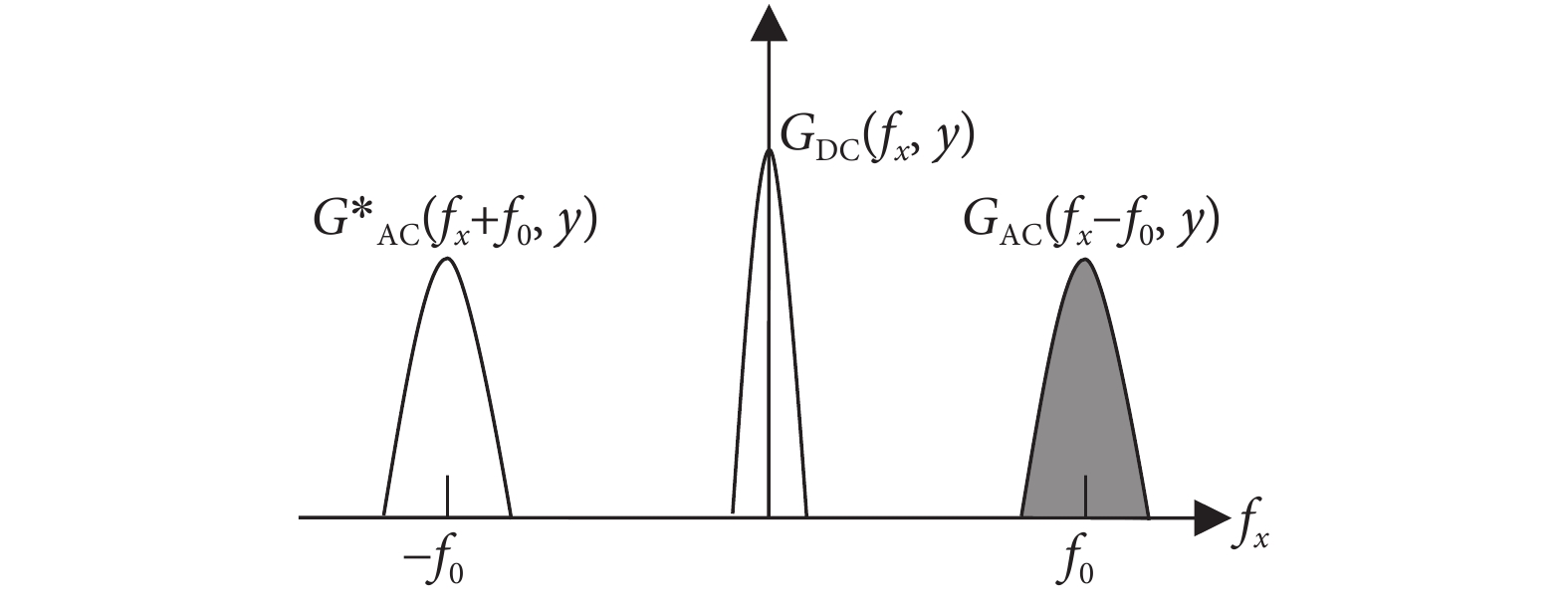 圖3
圖3
 的傅里葉頻譜
Figure3.
Fourier spectral of
的傅里葉頻譜
Figure3.
Fourier spectral of 
1.2.2 漫反射圖像空間解調
本文使用SSMD方法抽取  和
和  中包含的DC和AC分量,該方法源自希爾伯特變換理論,利用調和函數的正交性,能從單幅漫反射圖像中分離DC和AC分量,因而能夠將傳統SFD成像技術的采集速度提升2倍[13-14]。對于沿x方向調制、空間頻率為f0的漫反射圖像
中包含的DC和AC分量,該方法源自希爾伯特變換理論,利用調和函數的正交性,能從單幅漫反射圖像中分離DC和AC分量,因而能夠將傳統SFD成像技術的采集速度提升2倍[13-14]。對于沿x方向調制、空間頻率為f0的漫反射圖像  和
和  ,SSMD方法使用一個長度為σ的一維滑動窗口過濾兩幅漫反射圖像,σ為1/f0長度在兩幅漫反射圖像中所占像素點個數。使用SSMD方法獲得
,SSMD方法使用一個長度為σ的一維滑動窗口過濾兩幅漫反射圖像,σ為1/f0長度在兩幅漫反射圖像中所占像素點個數。使用SSMD方法獲得  的DC和AC分量如式(6)和式(7)所示:
的DC和AC分量如式(6)和式(7)所示:
 |
 |
同樣使用SSMD方法對  進行空間解調,即可獲取
進行空間解調,即可獲取  包含的DC和AC分量
包含的DC和AC分量  和
和  。
。
1.2.3 輪廓矯正
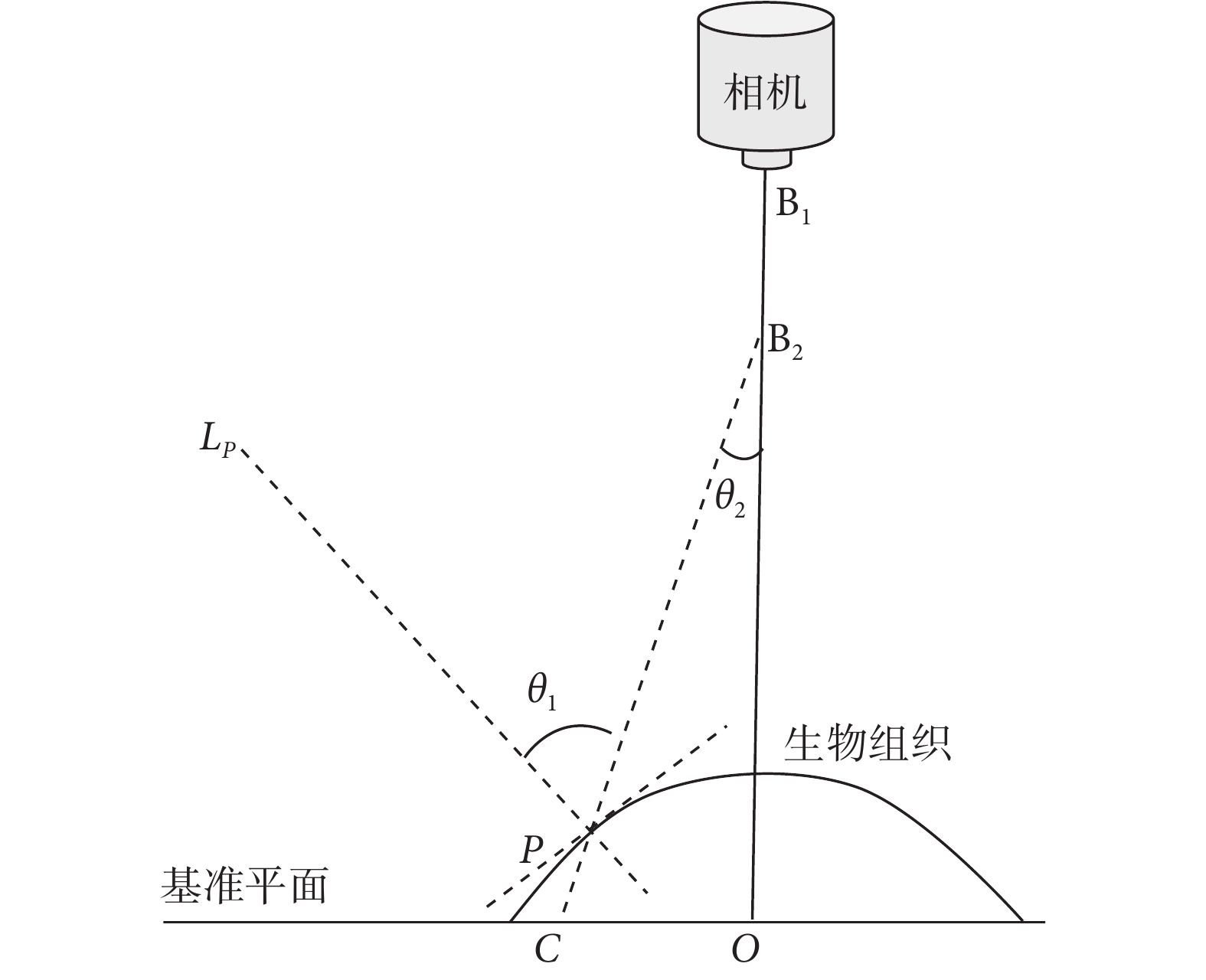
為方便處理,將生物組織的輪廓信息h(x, y)及基準平面剖分為四邊形面元網格,網格個數與相機像素點個數保持一致(256 × 256)。輪廓矯正從成像系統的采集光路出發,矯正原理如圖4所示,標定O為空間坐標原點。根據h(x, y)及相機采集區域,可獲得基準平面任一面元C和生物組織表面任一面元P的空間坐標,以及面元P的法線LP,其中面元C和面元P對應相機先后采集基準平面和生物組織表面的同一陣列點。
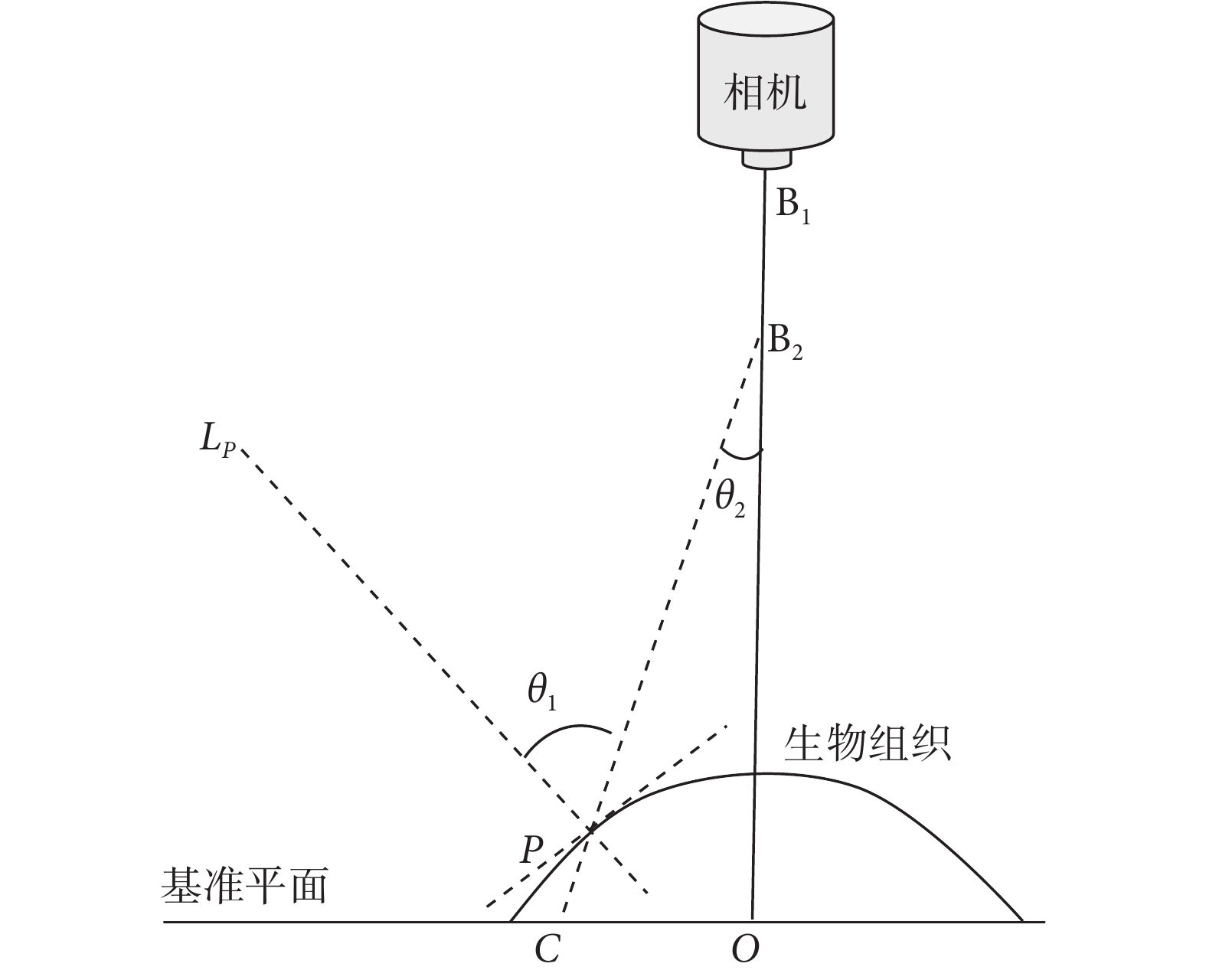 圖4
輪廓矯正原理圖
Figure4.
Principle of profile correction
圖4
輪廓矯正原理圖
Figure4.
Principle of profile correction
根據光路可逆性,可將圖4中的B2點看作發光質點,面元C和面元P看作受光面。從B2點發出的光線與面元C和面元P的法線分別存在夾角θ1和θ2,即入射角,兩個夾角可通過B2點、C點及P點的空間坐標獲得。光照度第一、第二定律指出,受光面的照度與質點到受光面的距離平方成反比、與質點光線入射角的余弦成正比[19-20]。以O點為參考點,圖4面元C在  和
和  中像素值的修正如式(8)所示:
中像素值的修正如式(8)所示:
 |
式(8)中, ;lC表示圖4中B2點和C點的距離。圖4面元P在
;lC表示圖4中B2點和C點的距離。圖4面元P在  和
和  中像素值的修正如式(9)所示:
中像素值的修正如式(9)所示:
 |
式(9)中,lP表示圖4中B2點和P點的距離。由于面元C和面元P代表基準平面和生物組織表面任意面元,因此根據式(8)和式(9)即可獲得輪廓矯正后的  、
、 、
、 、
、 四幅圖像。
四幅圖像。
1.2.4 光學參數成像
對于圖1的成像系統,入射到生物組織表面的寬場正弦光源可表示為DC分量和AC分量的線性疊加,如式(10)所示:
 |
式(10)中, 和
和  表示寬場正弦光源各點DC和AC分量的幅度。根據系統分析理論[21],輪廓矯正前生物組織表面各點DC或AC分量的幅度為該點
表示寬場正弦光源各點DC和AC分量的幅度。根據系統分析理論[21],輪廓矯正前生物組織表面各點DC或AC分量的幅度為該點  或
或  、成像系統調制傳遞函數(modulation transfer function,MTF)
、成像系統調制傳遞函數(modulation transfer function,MTF)  及漫反射率
及漫反射率  的乘積,如式(11)所示:
的乘積,如式(11)所示:
 |
式(11)中,f0為零表示DC分量,f0非零表示AC分量。 和
和  為測量過程的固有物理量,可采用差分測量方法消除
為測量過程的固有物理量,可采用差分測量方法消除  和
和  對測量過程的影響,方法為:在已知漫反射板的漫反射率為99%的前提下,先獲得基準平面漫反射圖像DC和AC分量的幅度,然后根據式(11)和
對測量過程的影響,方法為:在已知漫反射板的漫反射率為99%的前提下,先獲得基準平面漫反射圖像DC和AC分量的幅度,然后根據式(11)和  獲得輪廓矯正前生物組織表面各點漫反射率,如式(12)所示:
獲得輪廓矯正前生物組織表面各點漫反射率,如式(12)所示:
 |
輪廓矯正后,將式(8)和式(9)獲得的  和
和  代替式(12)中的
代替式(12)中的  和
和  ,即可獲得輪廓矯正后生物組織表面各點漫反射率
,即可獲得輪廓矯正后生物組織表面各點漫反射率  。
。
生物組織表面各點的吸收和散射效應包含于  中,吸收和散射效應可通過吸收系數
中,吸收和散射效應可通過吸收系數  和約化散射系數
和約化散射系數  描述。為實現生物組織表面各點
描述。為實現生物組織表面各點  和
和  的有效分離,可將生物組織表面各點看作獨立存在的生物組織[15, 21],然后建立寬場正弦光在均勻生物組織中的傳輸模型,并在模型框架上建立任意生物組織表面漫反射率
的有效分離,可將生物組織表面各點看作獨立存在的生物組織[15, 21],然后建立寬場正弦光在均勻生物組織中的傳輸模型,并在模型框架上建立任意生物組織表面漫反射率  與
與  的映射關系庫
的映射關系庫  ,最后將實際測量得到的
,最后將實際測量得到的  在
在  映射關系庫中逐點查表即可獲得實際生物組織表面各點的
映射關系庫中逐點查表即可獲得實際生物組織表面各點的  。
。
本文將電磁場領域的擴散方程作為光學傳輸模型的基本框架[1-2],描述寬場正弦光在生物組織中的傳播過程。將式(10)中的DC和AC光源項代入擴散方程后,通過化簡可獲得任意生物組織內部光流量率  與深度z相關的一維二階赫姆霍茲微分方程[21],如式(13)所示:
與深度z相關的一維二階赫姆霍茲微分方程[21],如式(13)所示:
 '/> '/> |
式(13)中, ;
; ;
; 為內光源項。根據部分流邊界條件(partial-current boundary condition)[22],邊界處的光流量正比于
為內光源項。根據部分流邊界條件(partial-current boundary condition)[22],邊界處的光流量正比于  。將部分流邊界條件作為特解代入式(13)后,可獲得式(13)的解析解,進而獲得
。將部分流邊界條件作為特解代入式(13)后,可獲得式(13)的解析解,進而獲得  和
和  的映射關系,如式(14)所示:
的映射關系,如式(14)所示:
 '/> '/> |
式(14)中, ,
,
 為擴散傳輸內反射系數,n為生物組織內部的折射率,一般取n = 1.4;
為擴散傳輸內反射系數,n為生物組織內部的折射率,一般取n = 1.4; 。
。
本文建立的  映射關系庫中,
映射關系庫中, 的范圍0.001~0.5 mm?1,步長
的范圍0.001~0.5 mm?1,步長  ,
, 的范圍0.6~2.5 mm?1,步長0.001 mm?1,
的范圍0.6~2.5 mm?1,步長0.001 mm?1, 和
和  的范圍能覆蓋常見生物組織的光學參數[23-25]。對于寬場正弦光空間頻率的選取,即AC分量的空間頻率,相關SFD成像理論指出,AC分量的空間頻率越高,重構的
的范圍能覆蓋常見生物組織的光學參數[23-25]。對于寬場正弦光空間頻率的選取,即AC分量的空間頻率,相關SFD成像理論指出,AC分量的空間頻率越高,重構的  值越準確,但AC分量的空間頻率需小于0.33μtr [21]。根據本文建立的
值越準確,但AC分量的空間頻率需小于0.33μtr [21]。根據本文建立的  映射關系庫中
映射關系庫中  和
和  的范圍,可計算出AC分量的空間頻率不應超過0.2 mm?1。
的范圍,可計算出AC分量的空間頻率不應超過0.2 mm?1。
本文建立的  的部分映射關系庫如圖5所示,AC分量的空間頻率為 0.2 mm? 1;橫軸表示DC軸,即
的部分映射關系庫如圖5所示,AC分量的空間頻率為 0.2 mm? 1;橫軸表示DC軸,即  ,縱軸表示AC軸,即
,縱軸表示AC軸,即  ;紅線表示不同的
;紅線表示不同的  值曲線,黑線表示不同的
值曲線,黑線表示不同的  值曲線,紅線和黑線相交形成
值曲線,紅線和黑線相交形成  交點。查表方法為:將輪廓矯正后生物組織表面各點
交點。查表方法為:將輪廓矯正后生物組織表面各點  和
和  分別向圖5中的DC和AC軸做垂線,離垂線交點最近的
分別向圖5中的DC和AC軸做垂線,離垂線交點最近的  交點即為該點的
交點即為該點的  值[3, 15],這樣便可將輪廓信息與SFD成像算法結合,獲得任意不平整生物組織的光學參數圖像。
值[3, 15],這樣便可將輪廓信息與SFD成像算法結合,獲得任意不平整生物組織的光學參數圖像。
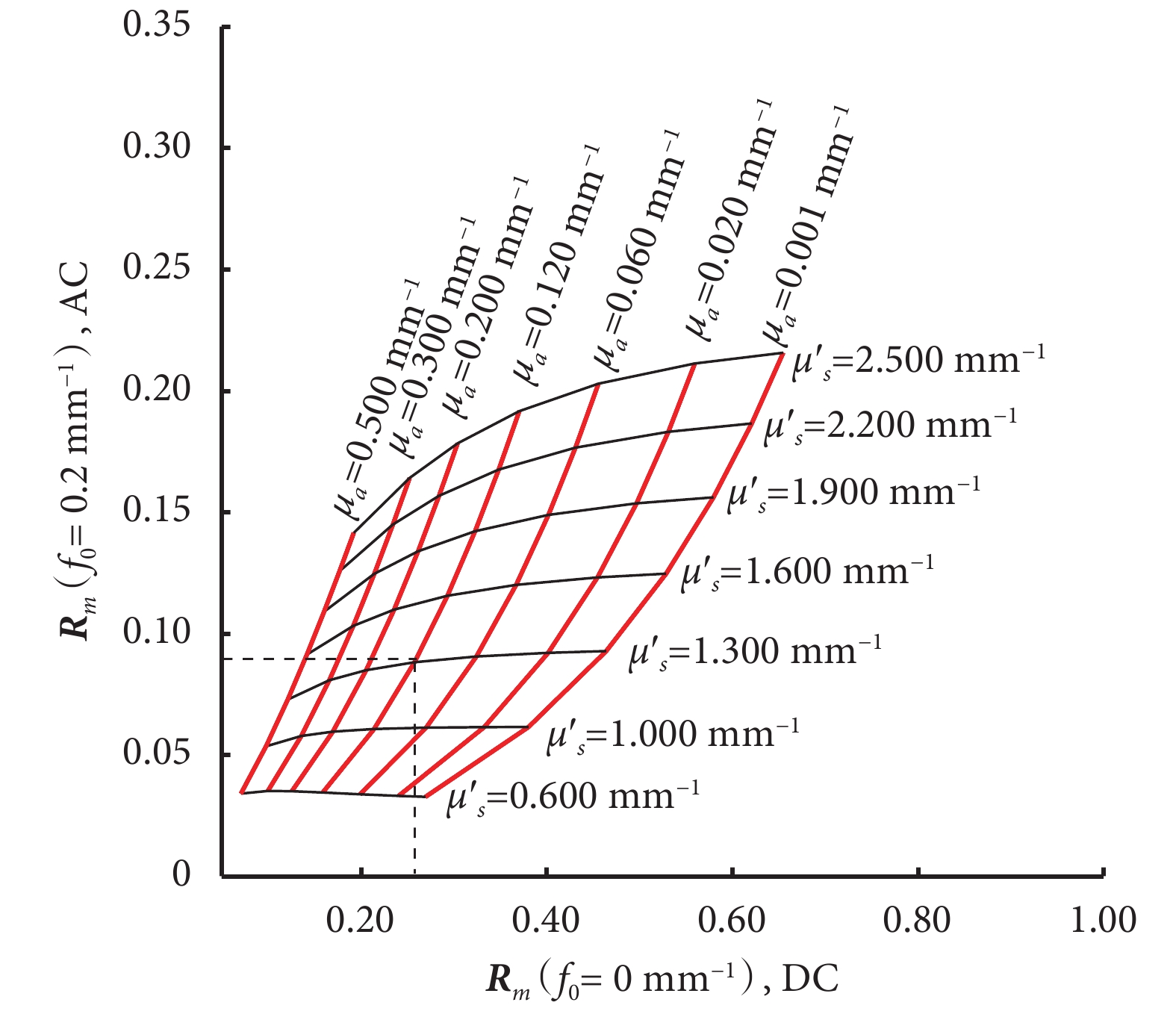 圖5
圖5
 部分映射關系庫
Figure5.
Partial mapping relations of
部分映射關系庫
Figure5.
Partial mapping relations of 
2 實驗結果與分析
輪廓測量和光學參數成像所用寬場正弦光的空間頻率為0.2 mm?1,與  映射關系庫中的空間頻率保持一致。本文以一塊長、寬、高分別為70、70、30 mm的均勻平板仿體為實驗對象,通過改變平板仿體的高度和角度,驗證輪廓測量和輪廓矯正方法的有效性;然后以人臉仿體為實驗對象,驗證成像系統對復雜輪廓生物組織表面光學參數獲取的有效性;最后以一名受試者的腦前額葉為試驗對象,驗證成像系統面向活體組織成像的實用性,所有實驗的相機積分時間均為0.10 s。本文仿體的制作材料均為與人體組織散射參數接近的聚甲醛[26-27], 650 nm波長下聚甲醛的
映射關系庫中的空間頻率保持一致。本文以一塊長、寬、高分別為70、70、30 mm的均勻平板仿體為實驗對象,通過改變平板仿體的高度和角度,驗證輪廓測量和輪廓矯正方法的有效性;然后以人臉仿體為實驗對象,驗證成像系統對復雜輪廓生物組織表面光學參數獲取的有效性;最后以一名受試者的腦前額葉為試驗對象,驗證成像系統面向活體組織成像的實用性,所有實驗的相機積分時間均為0.10 s。本文仿體的制作材料均為與人體組織散射參數接近的聚甲醛[26-27], 650 nm波長下聚甲醛的  和
和  分別為0.004 mm?1和0.8 mm?1。
分別為0.004 mm?1和0.8 mm?1。
2.1 輪廓測量的準確性驗證
本文設計了平板仿體在不同高度和角度下的輪廓測量實驗,實驗結果如圖6所示。對于高度測量,本實驗以平板仿體與基準平面的高度差0 mm為起點,5 mm為步長,利用剪式升降臺線性增加平板仿體的高度,使用FTP獲得了平板仿體在不同高度下的輪廓圖,然后將相同高度下的輪廓均值作為高度測量結果,計算測量結果與真實高度的絕對誤差。對于角度測量,本實驗將平板仿體沿x或y軸旋轉,使其與基準平面呈一定夾角,以平板仿體與基準平面的夾角10°為起點,5°為步長(工業量角器確定夾角),使用FTP獲得了平板仿體在不同角度下的輪廓圖,然后將輪廓圖的法線與光學平臺的夾角作為角度測量結果,計算角度測量結果與真實角度的絕對誤差。
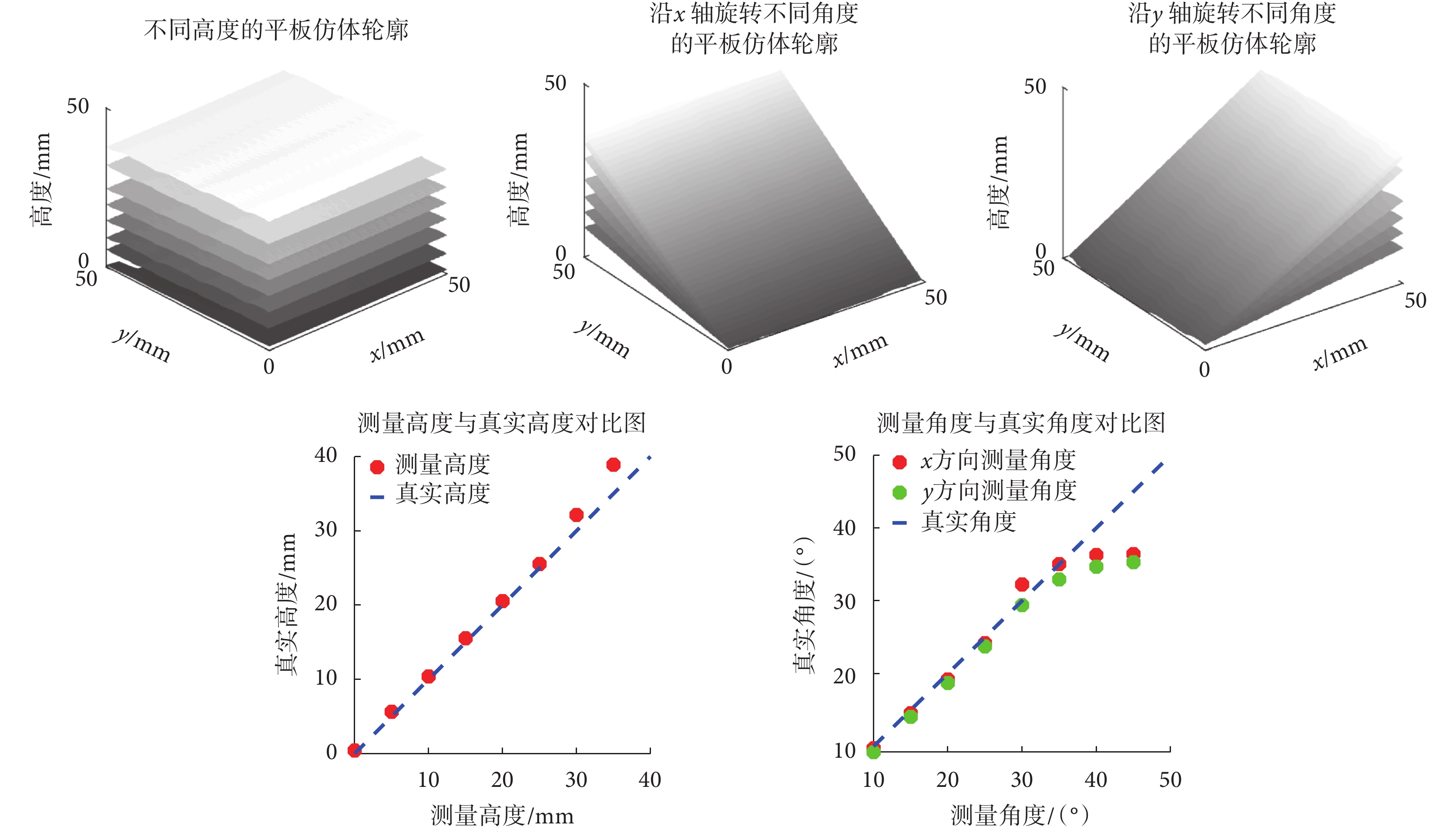 圖6
平板仿體的輪廓測量結果
Figure6.
Profilometry measurements of the slab phantom
圖6
平板仿體的輪廓測量結果
Figure6.
Profilometry measurements of the slab phantom
從圖6可以看出,隨著平板仿體高度和角度的增加,測量精度不斷下降。對于高度測量,平板仿體位于0~25 mm高度時的絕對測量誤差不超過1 mm、位于30 mm高度時的絕對測量誤差為2.1 mm、位于40 mm高度時的絕對測量誤差達到4.1 mm。對于x方向角度測量,平板仿體與基準平面夾角為0°~35° 時的絕對測量誤差不超過2.2°、夾角為40°時的絕對測量誤差為3.8°、夾角為45°時的絕對測量誤差為8.6°。對于y方向角度測量,平板仿體與基準平面夾角為0°~35° 時的絕對測量誤差不超過2.1°、夾角為40°時的絕對測量誤差為5.4°、夾角為45°時的絕對測量誤差為9.6°。從圖6可總結出,平板仿體的高度超過30 mm后,高度測量的絕對誤差增長較快,平板仿體與基準平面的夾角超過40°后,角度測量的絕對誤差增長較快,根據本實驗可評估出成像系統的高度測量閾值約為30 mm,角度測量閾值約為40°。
2.2 光學參數矯正的準確性驗證
本文比較了平板仿體在不同高度和角度時,輪廓矯正前和矯正后的光學參數測量結果,測量結果為重構光學參數圖像的加權平均。對于輪廓矯正中的高度矯正,本實驗以平板仿體與基準平面的高度差5 mm為起點,5 mm為步長。對于輪廓矯正中的角度矯正,本實驗以平板仿體與基準平面的夾角10°為起點,5°為步長,輪廓矯正前和矯正后的光學參數對比如圖7所示。
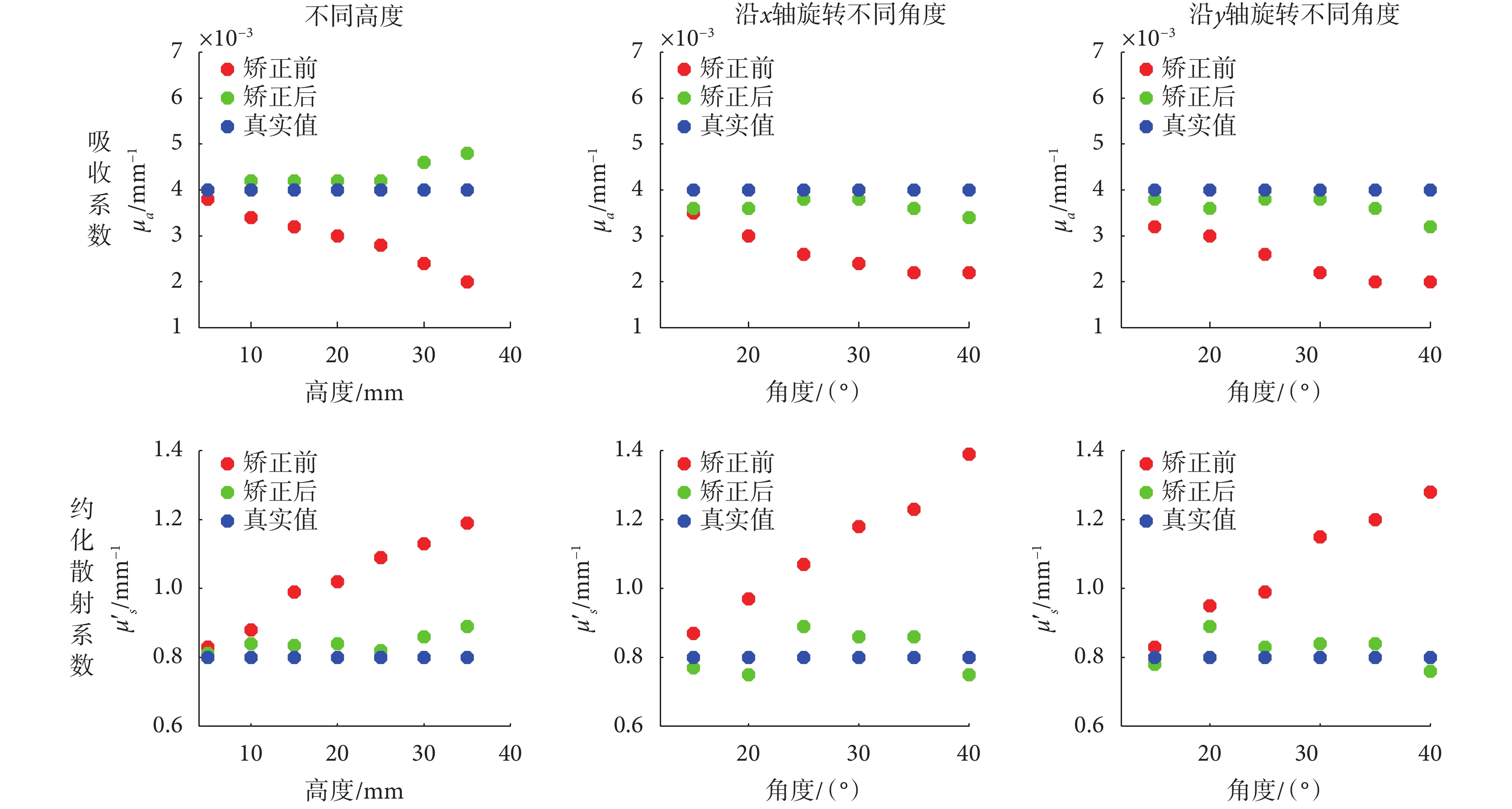 圖7
輪廓矯正前后的平板仿體光學參數
Figure7.
The corrected and uncorrected optical parameters of the slab phantom
圖7
輪廓矯正前后的平板仿體光學參數
Figure7.
The corrected and uncorrected optical parameters of the slab phantom
圖7中,平板仿體與基準平面的高度差為5~30 mm時, 經輪廓矯正后的最大測量誤差從32.50%降至15.00%,
經輪廓矯正后的最大測量誤差從32.50%降至15.00%, 經輪廓矯正后的最大測量誤差從41.25%降至11.25%。平板仿體與基準平面在x方向的夾角為10°~40°時,
經輪廓矯正后的最大測量誤差從41.25%降至11.25%。平板仿體與基準平面在x方向的夾角為10°~40°時, 經輪廓矯正后的最大測量誤差從46.27%降至6.89%,
經輪廓矯正后的最大測量誤差從46.27%降至6.89%, 經輪廓矯正后的最大測量誤差從72.18%降至10.26%。平板仿體與基準平面在y方向的夾角為10°~40°時,
經輪廓矯正后的最大測量誤差從72.18%降至10.26%。平板仿體與基準平面在y方向的夾角為10°~40°時, 經輪廓矯正后的最大測量誤差從45.82%降至6.33%,
經輪廓矯正后的最大測量誤差從45.82%降至6.33%, 經輪廓矯正后的最大測量誤差從57.90%降至10.24%。圖7證明了生物組織表面各點與基準平面的高度或角度不相等時會影響光學參數的定量重構結果,輪廓矯正前
經輪廓矯正后的最大測量誤差從57.90%降至10.24%。圖7證明了生物組織表面各點與基準平面的高度或角度不相等時會影響光學參數的定量重構結果,輪廓矯正前  的重構結果與高度和角度負相關、
的重構結果與高度和角度負相關、 的重構結果與高度和角度正相關,使用本文提出的輪廓矯正方法能有效減少因生物組織表面各點與基準平面高度或角度不相等時引起的光學參數定量重構誤差,使生物組織光學參數的重構結果與真實值更加接近。
的重構結果與高度和角度正相關,使用本文提出的輪廓矯正方法能有效減少因生物組織表面各點與基準平面高度或角度不相等時引起的光學參數定量重構誤差,使生物組織光學參數的重構結果與真實值更加接近。
2.3 人臉仿體成像的準確性驗證
人臉仿體由3D打印技術制作完成,其最大長、寬、高分別約為5、3、1 cm。人臉仿體的三維輪廓及光學參數成像結果如圖8所示,黑色箭頭指向人臉仿體光學參數的真實值。輪廓最大高度測量誤差為3.59%,出現于鼻尖位置。輪廓矯正前人臉仿體  圖像的平均重構誤差為45.42%,輪廓矯正后人臉仿體
圖像的平均重構誤差為45.42%,輪廓矯正后人臉仿體  圖像的平均重構誤差為8.03%,可以看出輪廓矯正后邊緣區域的
圖像的平均重構誤差為8.03%,可以看出輪廓矯正后邊緣區域的  值與真實值更加貼近,輪廓矯正前和矯正后鼻尖處的
值與真實值更加貼近,輪廓矯正前和矯正后鼻尖處的  值變化不大,原因可能為FTP對陡峭(突變)位置的測量誤差較大,或輪廓矯正方法對陡峭位置的光學參數矯正誤差較大,造成光學參數重構精度的降低。輪廓矯正前人臉仿體
值變化不大,原因可能為FTP對陡峭(突變)位置的測量誤差較大,或輪廓矯正方法對陡峭位置的光學參數矯正誤差較大,造成光學參數重構精度的降低。輪廓矯正前人臉仿體  圖像的平均重構誤差為58.27%,輪廓矯正后人臉仿體
圖像的平均重構誤差為58.27%,輪廓矯正后人臉仿體  圖像的平均重構誤差為6.85%,可以看出輪廓矯正后總體
圖像的平均重構誤差為6.85%,可以看出輪廓矯正后總體  值的重構誤差得到明顯降低,部分前額葉區的
值的重構誤差得到明顯降低,部分前額葉區的  值仍與真實值差距較大,原因可能為此區域鏡面反射光的影響。圖8證明了本文提出的輪廓矯正方法面向具有復雜輪廓組織的光學參數重構時,能大幅減少因復雜輪廓的存在引起的光學參數定量提取誤差。
值仍與真實值差距較大,原因可能為此區域鏡面反射光的影響。圖8證明了本文提出的輪廓矯正方法面向具有復雜輪廓組織的光學參數重構時,能大幅減少因復雜輪廓的存在引起的光學參數定量提取誤差。
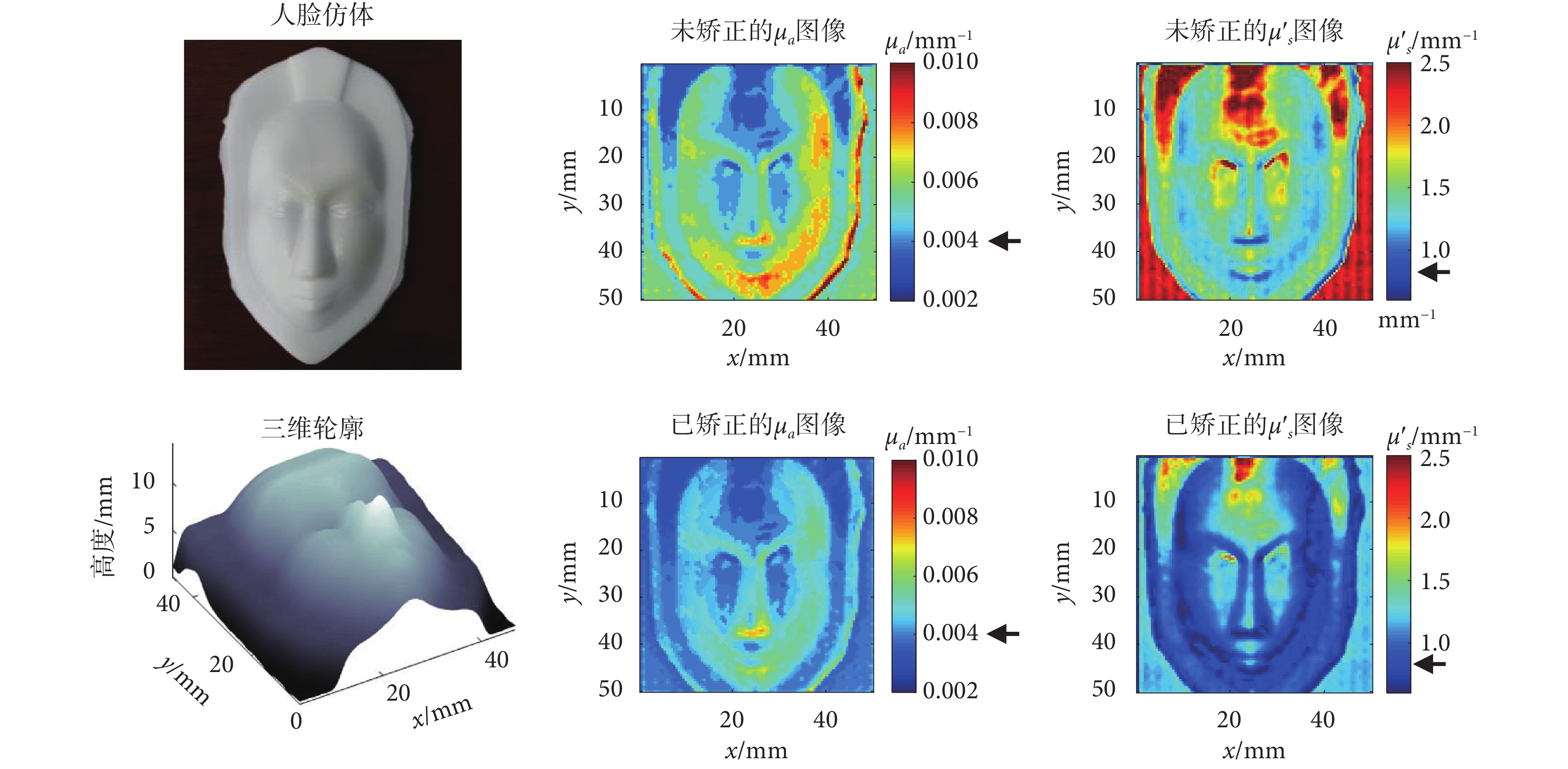 圖8
人臉仿體成像結果
Figure8.
Imaging of a face-like phantom
圖8
人臉仿體成像結果
Figure8.
Imaging of a face-like phantom
2.4 在體成像
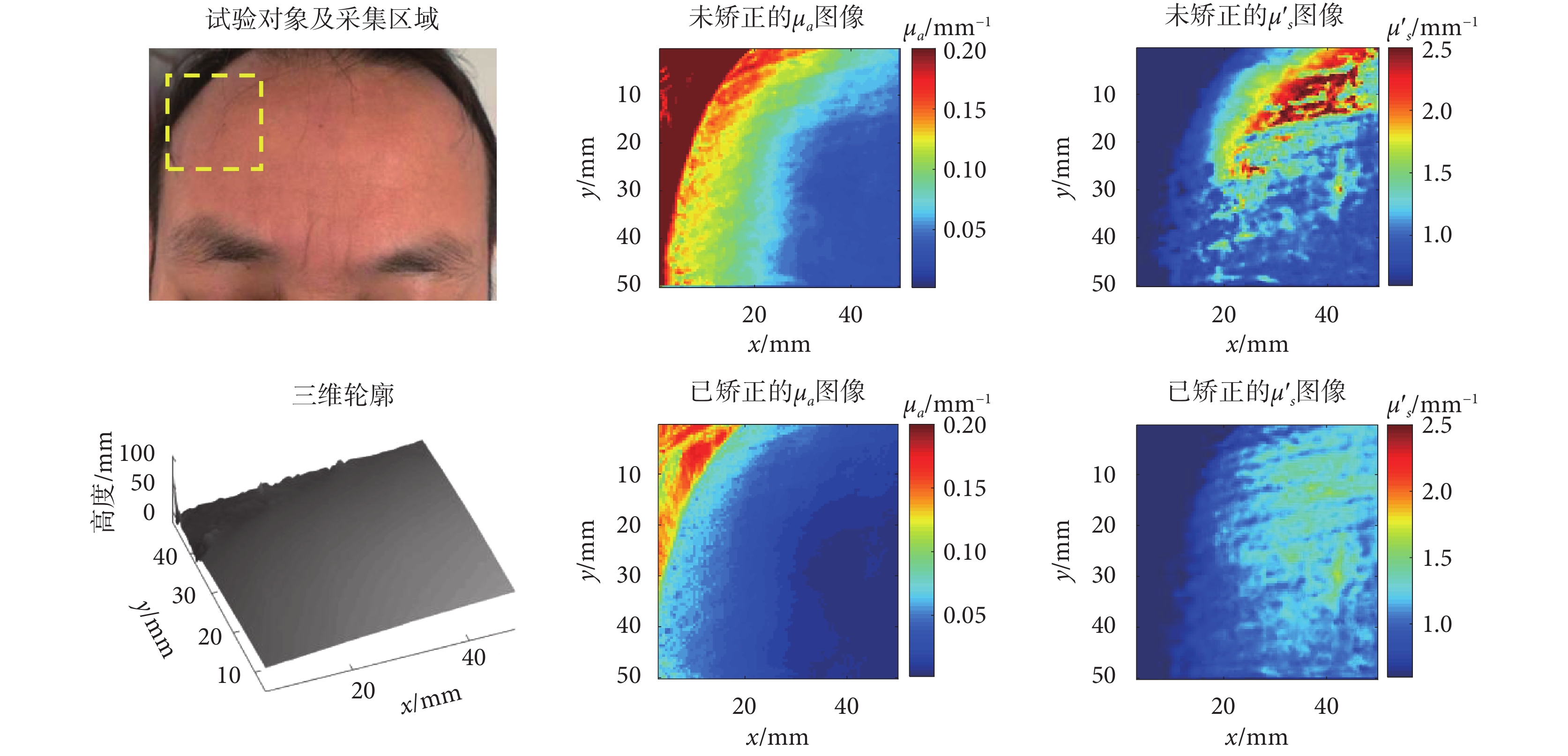
本文以一名受試者的腦前額葉為試驗對象,驗證了成像系統面向臨床活體組織的實用性。試驗數據采集地為中國醫學科學院北京協和醫學院生物醫學工程研究所,受試者為中國醫學科學院北京協和醫學院生物醫學工程研究所的職工,40歲健康男性,無疾病史,試驗已獲得天津中醫藥大學醫學倫理委員會批準,受試者已簽署知情同意書。為獲取一個輪廓變化明顯的試驗對象,本試驗將受試者腦前額葉左側邊緣區域置于成像系統的采集區域。受試者腦前額葉的三維輪廓及光學參數成像結果如圖9所示,黃色虛框為成像系統的采集區域。輪廓矯正前,梯度變化較大區域的  值變化明顯,頭發部位的
值變化明顯,頭發部位的  值最大,
值最大, 值較小,原因在于頭發中的黑色素對光吸收明顯[2]。輪廓矯正后,梯度變化較大區域的
值較小,原因在于頭發中的黑色素對光吸收明顯[2]。輪廓矯正后,梯度變化較大區域的  值變化趨于平緩,
值變化趨于平緩, 圖像更加均勻,與實際情況更加接近。圖9進一步驗證了成像系統能夠將輪廓信息與光學參數重構算法結合,并證明了成像系統在面向活體組織成像時的可靠性和實用性。
圖像更加均勻,與實際情況更加接近。圖9進一步驗證了成像系統能夠將輪廓信息與光學參數重構算法結合,并證明了成像系統在面向活體組織成像時的可靠性和實用性。
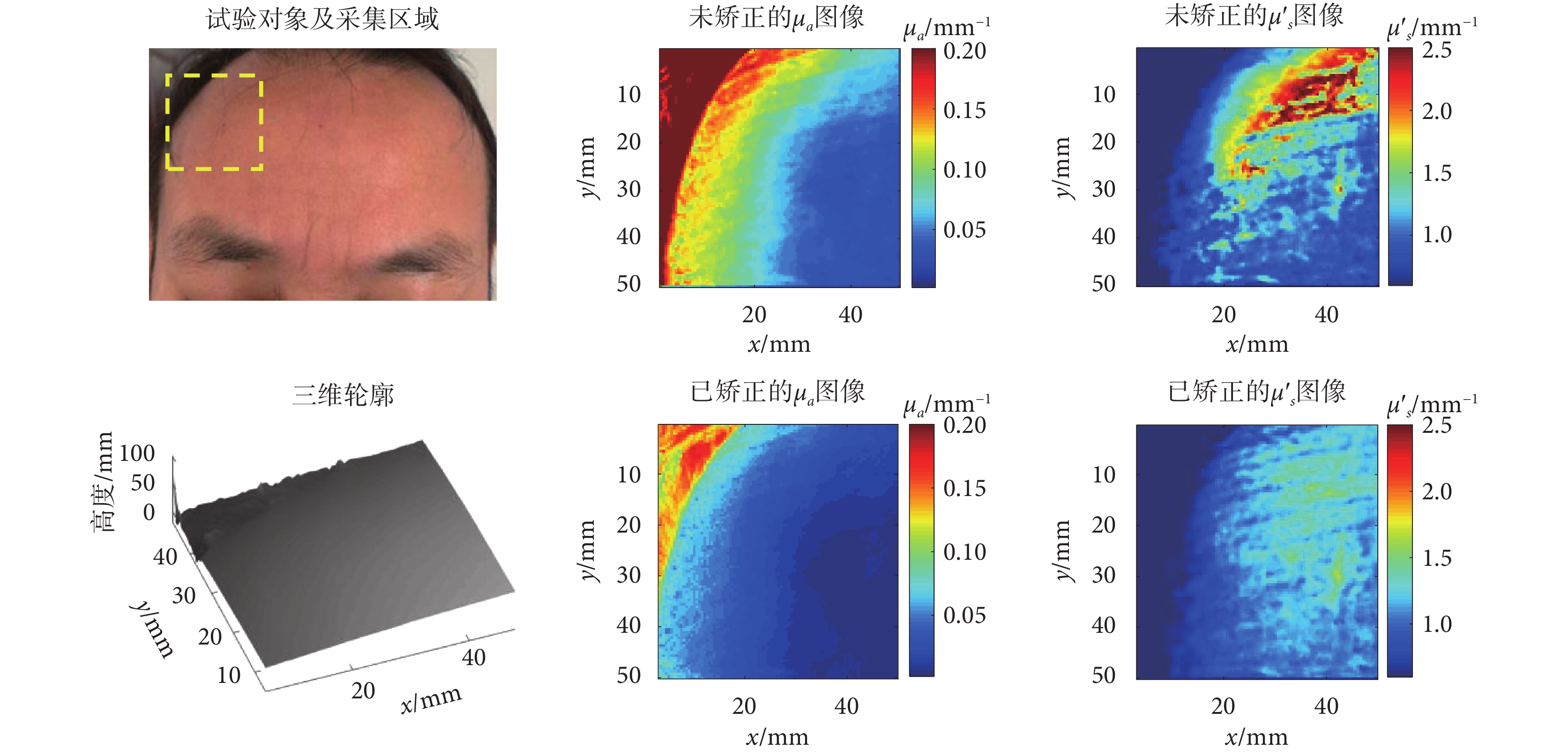 圖9
受試者腦前額葉成像結果
Figure9.
Imaging of a human’s prefrontal lobe
圖9
受試者腦前額葉成像結果
Figure9.
Imaging of a human’s prefrontal lobe
3 討論
圖1成像系統采用斜投影(入射角約4°)的方式消除鏡面反射光對數據采集的影響,與采用偏振片消除鏡面反射光的垂直投影方式相比,斜投影方式能夠提高成像系統的性價比和減少數據采集時間,且Erickson等[15]驗證了采用入射角小于5°斜投影方式成像結果與采用垂直投影方式成像結果的偏差小于1%。但斜投影方式僅適用于表面粗糙生物組織的數據采集,且不能完全消除鏡面反射光的影響,因此下一步將在成像系統的光源和相機前端加裝偏振片,采用垂直投影方式完全消除鏡面反射光對數據采集的影響。
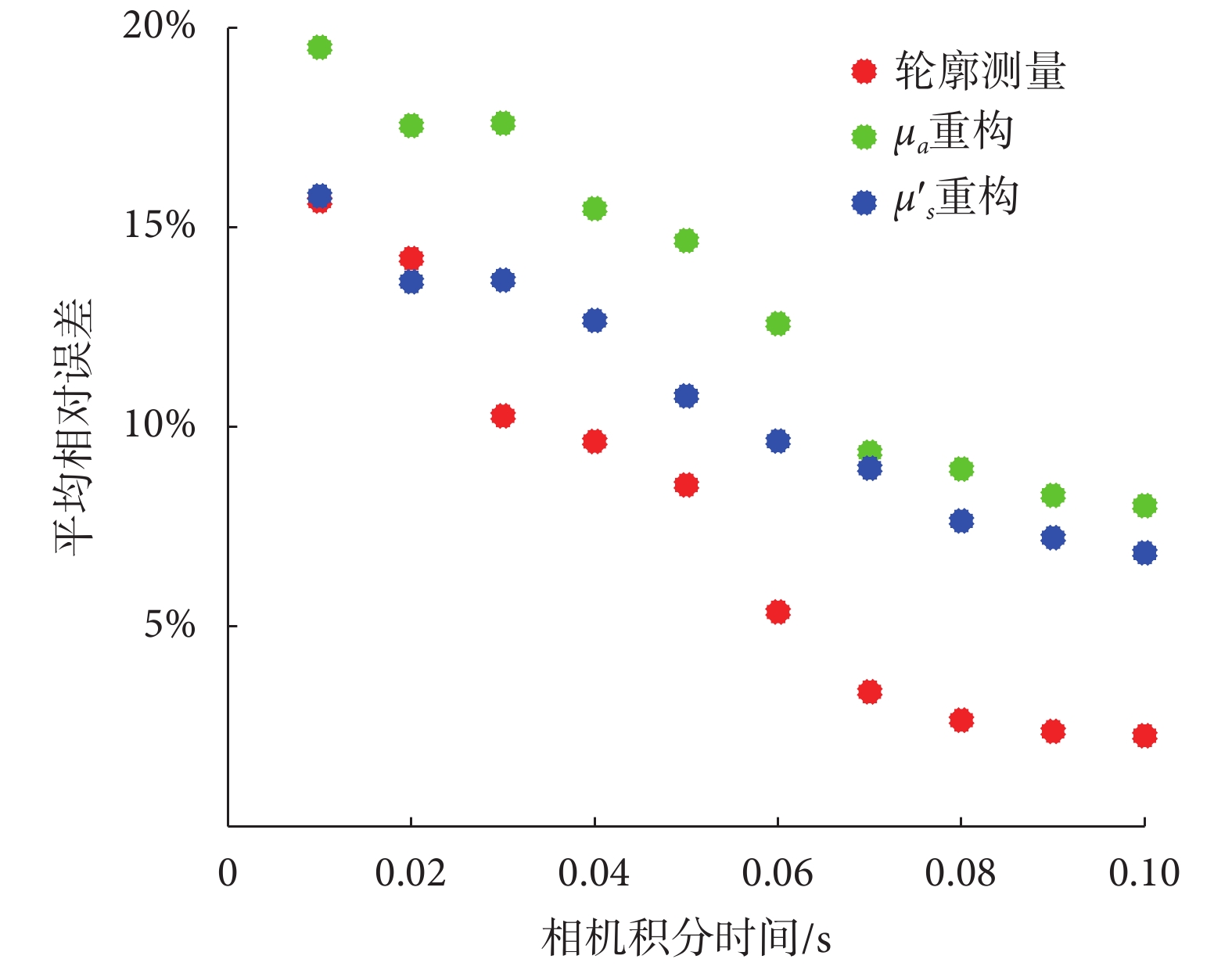
上述成像實驗中,成像系統中的相機積分時間均為0.10 s。為評估成像系統的動態應用性能,本文比較了不同相機積分時間的成像結果。實驗對象為圖8中的人臉仿體,成像結果的評估參數為:輪廓測量平均相對誤差(各點高度與真實高度相對誤差的平均值)、輪廓矯正后光學參數圖像平均重構誤差(各點  和
和  值與真實值相對誤差的平均值)。相機積分時間0.01~0.10 s、步長0.01 s的成像結果評估參數如圖10所示,可以看出隨著相機積分時間的增加,輪廓測量和輪廓矯正后各點光學參數的平均誤差呈下降趨勢,原因在于增加相機積分時間可有效提升測量數據的信噪比。相機積分時間0.01~0.07 s時,輪廓測量、
值與真實值相對誤差的平均值)。相機積分時間0.01~0.10 s、步長0.01 s的成像結果評估參數如圖10所示,可以看出隨著相機積分時間的增加,輪廓測量和輪廓矯正后各點光學參數的平均誤差呈下降趨勢,原因在于增加相機積分時間可有效提升測量數據的信噪比。相機積分時間0.01~0.07 s時,輪廓測量、 和
和  值重構的平均相對誤差下降明顯。相機積分時間0.08~0.10 s時,輪廓測量、
值重構的平均相對誤差下降明顯。相機積分時間0.08~0.10 s時,輪廓測量、 和
和  值重構的平均相對誤差下降緩慢。可以總結出,在相機積分時間0.10 s的基礎上,繼續增加相機積分時間對提升成像質量的貢獻趨于飽和,反而會降低成像系統的動態應用性能。此外,輪廓測量的平均誤差小于
值重構的平均相對誤差下降緩慢。可以總結出,在相機積分時間0.10 s的基礎上,繼續增加相機積分時間對提升成像質量的貢獻趨于飽和,反而會降低成像系統的動態應用性能。此外,輪廓測量的平均誤差小于  和
和  重構的平均相對誤差,可能由于寬場正弦光傳輸模型與實際存在匹配誤差或未考慮投影光路對輪廓矯正的影響所致。
重構的平均相對誤差,可能由于寬場正弦光傳輸模型與實際存在匹配誤差或未考慮投影光路對輪廓矯正的影響所致。 重構的平均相對誤差小于
重構的平均相對誤差小于  重構的平均相對誤差,原因可能為本文建立的
重構的平均相對誤差,原因可能為本文建立的  映射關系庫中
映射關系庫中  的步長小于
的步長小于  的步長,使
的步長,使  重構的精度更高。為進一步提升成像質量,下一步可將“適形投影”嵌入成像系統,消除投影光路對輪廓矯正的影響,并在
重構的精度更高。為進一步提升成像質量,下一步可將“適形投影”嵌入成像系統,消除投影光路對輪廓矯正的影響,并在  映射關系庫中減小
映射關系庫中減小  和
和  的步長,提升
的步長,提升  和
和  重構的精度。
重構的精度。
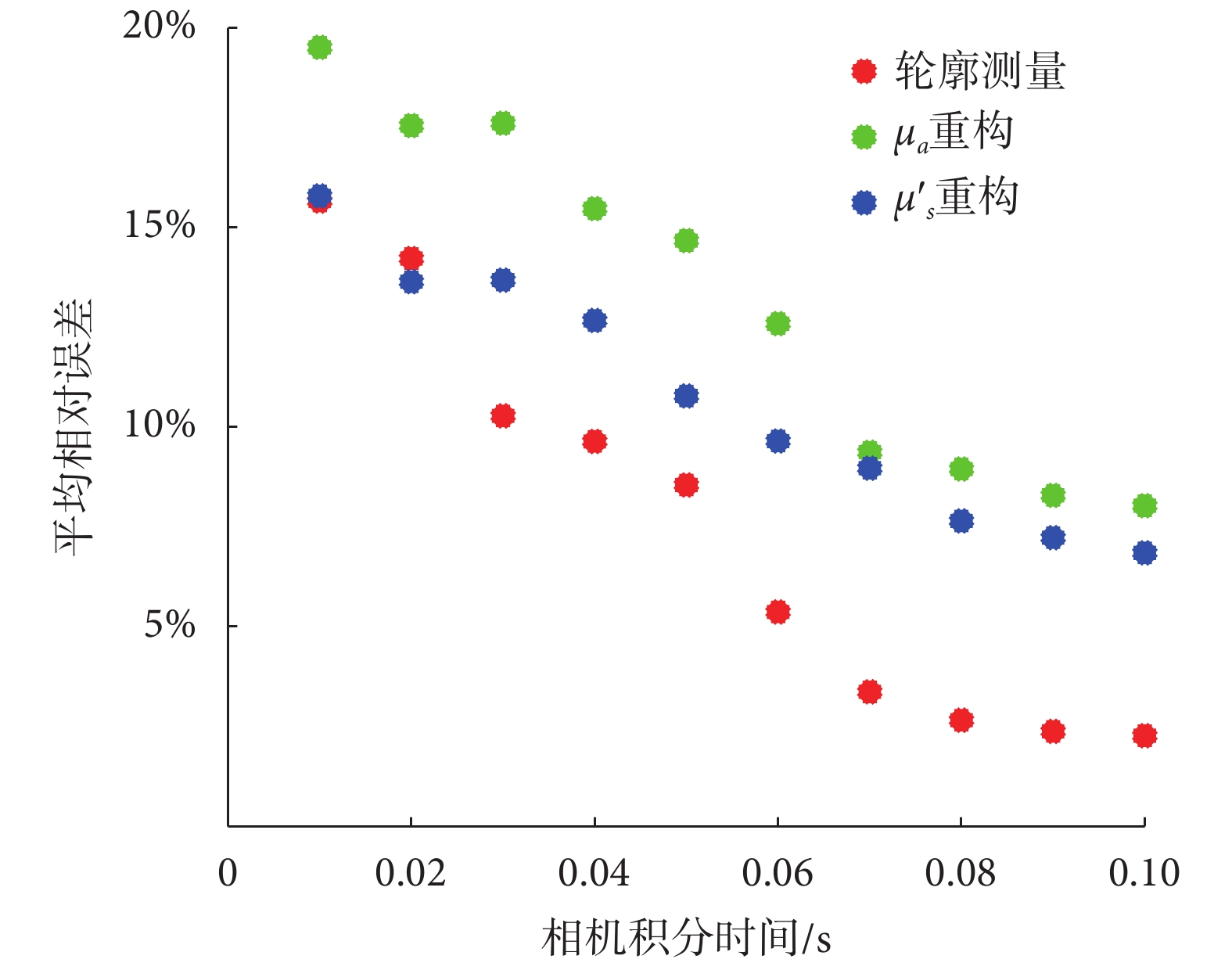 圖10
不同積分時間輪廓測量、光學參數圖像重構的平均相 對誤差
Figure10.
Relative errors of profilometry measurements and the optical parameters with different integration times
圖10
不同積分時間輪廓測量、光學參數圖像重構的平均相 對誤差
Figure10.
Relative errors of profilometry measurements and the optical parameters with different integration times
4 結論
本文針對傳統光學成像技術在輪廓矯正方面的缺陷,提出并研制了一套融合輪廓信息的光學參數成像系統,該系統采用FTP獲取生物組織的輪廓信息,并依據光照度定律矯正生物組織表面各點入射光強差異,最后將生物組織的輪廓信息與SFD成像算法結合,實現了生物組織的光學參數重構。平板仿體實驗評估了輪廓測量和光學參數重構的精度,驗證了輪廓矯正方法的有效性。實驗結果表明,輪廓測量精度較高,輪廓矯正前的光學參數重構誤差較大,將輪廓矯正融入光學參數重構算法能顯著降低光學參數的定量重構誤差。人臉仿體實驗和受試者腦前額葉成像試驗驗證了成像系統面向具有復雜輪廓生物組織時的可靠性和實用性,證明了成像系統的應用潛力。不同測量時間下的成像結果評估了成像系統的動態應用性能,證明了成像系統能在較短時間內獲得生物組織的輪廓信息和光學參數圖像。本文提出的成像系統具備快速獲取具有復雜輪廓生物組織光學參數圖像的臨床應用價值,同時本文提出的輪廓矯正方法可與現有光學成像技術結合,減少生物組織表面輪廓對成像質量的影響。
重要聲明
利益沖突聲明:本文全體作者均聲明不存在利益沖突。
作者貢獻聲明:李同心負責數據采集、程序編寫、論文寫作及修改;董葉青負責文獻檢索和論文初稿撰寫;劉明負責數據分析指導;趙靜負責項目主持及實驗指導;李明慧和李研哲參與文獻檢索、論文校對和定稿。
倫理聲明:本研究通過了天津中醫藥大學醫學倫理委員會的審批(批文編號:TJTCM20190301)。
引言
光在生物組織中的傳播包含散射、折射、反射、吸收等眾多物理過程,對邊界光包含的方向和光強衰減等信息進行分析,便可通過相關的光學參數描述生物組織內部的光學特性。眾多光學參數中,吸收系數和散射系數與臨床診斷和治療存在直接定量關系,吸收系數能反推生物組織的血氧動力學參數(氧合血紅蛋白、還原血紅蛋白、氧飽和度),散射系數可反映生物組織的微觀結構,因此有效、快速獲取生物組織的吸收和散射系數圖像是采用光學方法進行疾病診斷和治療的基礎[1-2]。現有光學成像技術中,空間頻域(spatial frequency domain,SFD)成像技術因其能夠有效分離吸收和散射效應間的相互影響而受到了廣泛關注,該成像技術的原理為:三個不同初始相位(0,2/3π,4/3π)的寬場正弦光依次照射生物組織,使用面陣探測器捕捉生物組織表面的漫反射圖像;采用三步相移法對漫反射圖像空間逐點解調分離出直流(direct current,DC)和交流(alternating current,AC)分量的幅度圖像后,結合特定的光學傳輸模型逐點求逆獲取點對點的吸收和散射系數拓撲圖像[3-5]。由于SFD成像技術采用面源照射、面陣探測器采集的方式,因此其具有非接觸、成像速度快、成像視場大等優勢,這些優勢使得SFD成像技術在腦功能成像、皮膚燒傷檢測等領域得到了廣泛應用[6-9]。
現階段的SFD成像技術主要以平整組織(如皮膚)為研究對象,首先標定已知光學參數的平板仿體或已知漫反射率的漫反射板表面為基準平面,然后將寬場正弦光分別投影到基準平面和生物組織表面,并使用相機分別采集基準平面和生物組織表面的漫反射圖像,兩幅漫反射圖像的差分測量結果被用于定量重構生物組織的光學參數拓撲圖像。對于具有復雜輪廓的生物組織,投影到其表面的寬場正弦光將發生畸變,這不僅會降低生物組織表面漫反射圖像的空間解調精度,也會造成后續光學參數定量提取的誤差[3, 10]。為解決生物組織表面輪廓對光學參數定量重構的影響,近年來許多學者圍繞SFD成像技術提出了一些輪廓矯正方法,如校準矯正法、三維(3-dimension,3D)模型矯正法和適形投影矯正法等。其中,校準矯正法針對不同的SFD成像系統或實驗條件,通過改變基準平面的高度和角度,建立基準平面光強與高度、角度間的矯正數據庫,然后從數據庫擬合出基準平面光強與高度、角度間的映射關系后,逐點矯正生物組織表面漫反射圖像各點光強,該方法導致測量過程極其繁瑣和耗時[10]。3D模型矯正法需借助3D打印技術制作生物組織的3D模型,該方法增加了測量成本與時間,不適用于臨床[11]。適形投影矯正法在校準矯正法的基礎上,需提前獲取生物組織的輪廓信息,并建立寬場正弦光畸變產生的諧波與輪廓的關系,然后調整投影的寬場正弦光,消除畸變產生的諧波干擾,該方法提高了校準矯正法的矯正精度,但仍然存在測量過程耗時的問題[12]。鑒于現有輪廓矯正方法的復雜性和低效性,大多數SFD成像技術的研究者忽略了生物組織的輪廓對成像質量的影響,導致成像結果并不可靠。如何設計出一套高效簡易的輪廓矯正方法,并將其與SFD成像算法融合,準確及快速獲取具有復雜輪廓生物組織的光學參數圖像,是現有SFD成像技術面臨的難題。
針對上述問題,本文研制了一套融合輪廓信息的光學參數成像系統,首先將已知漫反射率的漫反射板表面標定為基準平面,分別采集基準平面和生物組織表面的漫反射圖像,然后使用傅里葉變換輪廓術(Fourier transform profilometry,FTP)獲取生物組織的輪廓信息,并根據光照度定律矯正生物組織表面漫反射圖像各點光強,最后基于SFD成像原理快速獲取生物組織光學參數圖像。與現有輪廓矯正方法相比,本文研制的成像系統僅采集基準平面和生物組織表面的兩幅漫反射圖像,然后根據光照度定律進行輪廓矯正,避免了矯正數據庫的建立以及生物組織3D模型的制作,以期簡化測量過程、減少測量時間和成本。此外,本文采用單次快照多頻解調(single snapshot multiple frequency demodulation,SSMD)方法對兩幅漫反射圖像包含的DC和AC分量進行空間解調,以便進一步提升SFD成像速度和降低三步相移法中的解調震蕩問題[13-14]。本文研制的成像系統有望為臨床準確、快速提供具有復雜輪廓生物組織的光學參數圖像,同時本文提出的輪廓矯正方法或可與現有光學成像技術結合,以期減少生物組織表面輪廓對成像質量的影響。
1 方法
1.1 成像系統
成像系統的結構圖和實物圖如圖1所示,所有模塊均由特定支架固定于光學平臺上。照射端將一個650 nm波長的發光二極管(light emitting diode,LED)光源(PT-39,流明納斯半導體器件有限公司,中國)擴束、準直后聚焦于數字微鏡器(digital micromirror device,DMD)(DLP-4500,Texas Instruments,美國)表面,DMD對光源空間調制,生成特定空間頻率的寬場正弦光分別照射生物組織和99%漫反射率的漫反射板(SRT-99-240,Labsphere Inc.,美國),擴束、準直透鏡、DMD和LED光源共同構成投影模塊。采集端由一個面陣相機(MER-500-7um,大恒圖像視覺有限公司,中國)捕捉生物組織和漫反射板表面的漫反射圖像,相機采集區域為5 cm × 5 cm,像素點個數為256 × 256。為減少鏡面反射光的影響,本文通過實際測量和調整投影模塊,將DMD輸出光軸與光學平臺法線間呈約4°夾角[15]。
圖1
成像系統示意圖
Figure1.
Schematics of the imaging system
1.2 成像原理
成像系統的采集數據為生物組織和漫反射板表面的漫反射圖像,標定漫反射板表面為基準平面,成像步驟為:① 使用FTP獲取生物組織表面輪廓;② 采用SSMD方法解調出兩幅漫反射圖像的DC和AC幅度圖像;③ 利用生物組織的輪廓信息及光照度定律矯正生物組織表面及基準平面的DC和AC幅度圖像;④ 基于SFD成像原理獲取生物組織的光學參數(吸收和散射系數)拓撲圖像。
1.2.1 輪廓獲取
沿x方向調制的寬場正弦光分別投影到基準平面和生物組織表面時,相機采集的兩幅漫反射圖像 和 如式(1)和式(2)所示:
|
|
式(1)和式(2)中,(x, y)表示空間坐標; 和 分別表示 的 DC和AC分量; 和 分別表示 的DC和AC分量;f0表示投影寬場正弦光的空間頻率; 和 分別表示 和 的相位。
生物組織的輪廓信息包含于 和 中,可通過FTP獲得。FTP的原理如圖2所示[16],A1和A2為DMD投影的入瞳和出瞳,B1和B2為相機的出瞳和入瞳,投影光軸和采集光軸相交于基準平面的O點,b為A2和B2間的距離,l為B2到基準平面的距離,C點是基準平面上某一點。DMD將寬場正弦光投影到基準平面時,C點相位為ΦC,它在相機陣列S點成像,相機陣列S點的相位ΦS滿足ΦS = ΦC。DMD將寬場正弦光投影在生物組織表面時,其表面P點在相機陣列S點成像,相機陣列S點的新相位ΦS’滿足ΦS’ = ΦP。而ΦP = ΦD,ΦD為基準平面D點的相位,可以看出相機陣列S點先后得到兩個相位ΦS與ΦS’的差值?Φ,正是由于P點相對于基準平面的高度h引起的。由于S點代表相機陣列任意點,可計算出相機陣列任意點的前后兩次相位差 ,其中 表示圖2中C點和D點的距離。然后由圖2中的三角形A2PB2和三角形CPD相似可以得到生物組織的高度分布(輪廓)h(x, y),如式(3)所示:
圖2
FTP原理圖
Figure2.
Principle of FTP
|
可以看出,生物組織表面輪廓的測量轉化為 和 的測量。對式(1)和式(2)中的 和 沿x方向逐行傅里葉變換,如式(4)和式(5)所示:
|
|
式(4)和式(5)中,fx表示頻譜函數;、 和 分別為 、 和 的一維傅里葉頻譜, 為 的共軛函數;、 和 分別為 、 和 的一維傅里葉頻譜, 為 的共軛函數;符號“*”表示共軛。 的一維頻譜分布如圖3所示,陰影部分為基頻分量,包含了生物組織的輪廓信息。選用帶通濾波器提取 的基頻分量后,頻移到坐標原點進行一維傅里葉逆變換, 可通過虛部與實部比值的反正切值得到[17]。對 做相同處理獲得 后,使用質量圖引導法對 和 解包裹獲得連續相位分布[18],將解包裹后的 和 代入式(3)即可獲得生物組織的輪廓信息。
圖3
的傅里葉頻譜
Figure3.
Fourier spectral of
1.2.2 漫反射圖像空間解調
本文使用SSMD方法抽取 和 中包含的DC和AC分量,該方法源自希爾伯特變換理論,利用調和函數的正交性,能從單幅漫反射圖像中分離DC和AC分量,因而能夠將傳統SFD成像技術的采集速度提升2倍[13-14]。對于沿x方向調制、空間頻率為f0的漫反射圖像 和 ,SSMD方法使用一個長度為σ的一維滑動窗口過濾兩幅漫反射圖像,σ為1/f0長度在兩幅漫反射圖像中所占像素點個數。使用SSMD方法獲得 的DC和AC分量如式(6)和式(7)所示:
|
|
同樣使用SSMD方法對 進行空間解調,即可獲取 包含的DC和AC分量 和 。
1.2.3 輪廓矯正
為方便處理,將生物組織的輪廓信息h(x, y)及基準平面剖分為四邊形面元網格,網格個數與相機像素點個數保持一致(256 × 256)。輪廓矯正從成像系統的采集光路出發,矯正原理如圖4所示,標定O為空間坐標原點。根據h(x, y)及相機采集區域,可獲得基準平面任一面元C和生物組織表面任一面元P的空間坐標,以及面元P的法線LP,其中面元C和面元P對應相機先后采集基準平面和生物組織表面的同一陣列點。
圖4
輪廓矯正原理圖
Figure4.
Principle of profile correction
根據光路可逆性,可將圖4中的B2點看作發光質點,面元C和面元P看作受光面。從B2點發出的光線與面元C和面元P的法線分別存在夾角θ1和θ2,即入射角,兩個夾角可通過B2點、C點及P點的空間坐標獲得。光照度第一、第二定律指出,受光面的照度與質點到受光面的距離平方成反比、與質點光線入射角的余弦成正比[19-20]。以O點為參考點,圖4面元C在 和 中像素值的修正如式(8)所示:
|
式(8)中,;lC表示圖4中B2點和C點的距離。圖4面元P在 和 中像素值的修正如式(9)所示:
|
式(9)中,lP表示圖4中B2點和P點的距離。由于面元C和面元P代表基準平面和生物組織表面任意面元,因此根據式(8)和式(9)即可獲得輪廓矯正后的 、、、 四幅圖像。
1.2.4 光學參數成像
對于圖1的成像系統,入射到生物組織表面的寬場正弦光源可表示為DC分量和AC分量的線性疊加,如式(10)所示:
|
式(10)中, 和 表示寬場正弦光源各點DC和AC分量的幅度。根據系統分析理論[21],輪廓矯正前生物組織表面各點DC或AC分量的幅度為該點 或 、成像系統調制傳遞函數(modulation transfer function,MTF) 及漫反射率 的乘積,如式(11)所示:
|
式(11)中,f0為零表示DC分量,f0非零表示AC分量。 和 為測量過程的固有物理量,可采用差分測量方法消除 和 對測量過程的影響,方法為:在已知漫反射板的漫反射率為99%的前提下,先獲得基準平面漫反射圖像DC和AC分量的幅度,然后根據式(11)和 獲得輪廓矯正前生物組織表面各點漫反射率,如式(12)所示:
|
輪廓矯正后,將式(8)和式(9)獲得的 和 代替式(12)中的 和 ,即可獲得輪廓矯正后生物組織表面各點漫反射率 。
生物組織表面各點的吸收和散射效應包含于 中,吸收和散射效應可通過吸收系數 和約化散射系數 描述。為實現生物組織表面各點 和 的有效分離,可將生物組織表面各點看作獨立存在的生物組織[15, 21],然后建立寬場正弦光在均勻生物組織中的傳輸模型,并在模型框架上建立任意生物組織表面漫反射率 與 的映射關系庫 ,最后將實際測量得到的 在 映射關系庫中逐點查表即可獲得實際生物組織表面各點的 。
本文將電磁場領域的擴散方程作為光學傳輸模型的基本框架[1-2],描述寬場正弦光在生物組織中的傳播過程。將式(10)中的DC和AC光源項代入擴散方程后,通過化簡可獲得任意生物組織內部光流量率 與深度z相關的一維二階赫姆霍茲微分方程[21],如式(13)所示:
| '/> |
式(13)中,;; 為內光源項。根據部分流邊界條件(partial-current boundary condition)[22],邊界處的光流量正比于 。將部分流邊界條件作為特解代入式(13)后,可獲得式(13)的解析解,進而獲得 和 的映射關系,如式(14)所示:
| '/> |
式(14)中,, 為擴散傳輸內反射系數,n為生物組織內部的折射率,一般取n = 1.4;。
本文建立的 映射關系庫中, 的范圍0.001~0.5 mm?1,步長 , 的范圍0.6~2.5 mm?1,步長0.001 mm?1, 和 的范圍能覆蓋常見生物組織的光學參數[23-25]。對于寬場正弦光空間頻率的選取,即AC分量的空間頻率,相關SFD成像理論指出,AC分量的空間頻率越高,重構的 值越準確,但AC分量的空間頻率需小于0.33μtr [21]。根據本文建立的 映射關系庫中 和 的范圍,可計算出AC分量的空間頻率不應超過0.2 mm?1。
本文建立的 的部分映射關系庫如圖5所示,AC分量的空間頻率為 0.2 mm? 1;橫軸表示DC軸,即 ,縱軸表示AC軸,即 ;紅線表示不同的 值曲線,黑線表示不同的 值曲線,紅線和黑線相交形成 交點。查表方法為:將輪廓矯正后生物組織表面各點 和 分別向圖5中的DC和AC軸做垂線,離垂線交點最近的 交點即為該點的 值[3, 15],這樣便可將輪廓信息與SFD成像算法結合,獲得任意不平整生物組織的光學參數圖像。
圖5
部分映射關系庫
Figure5.
Partial mapping relations of
2 實驗結果與分析
輪廓測量和光學參數成像所用寬場正弦光的空間頻率為0.2 mm?1,與 映射關系庫中的空間頻率保持一致。本文以一塊長、寬、高分別為70、70、30 mm的均勻平板仿體為實驗對象,通過改變平板仿體的高度和角度,驗證輪廓測量和輪廓矯正方法的有效性;然后以人臉仿體為實驗對象,驗證成像系統對復雜輪廓生物組織表面光學參數獲取的有效性;最后以一名受試者的腦前額葉為試驗對象,驗證成像系統面向活體組織成像的實用性,所有實驗的相機積分時間均為0.10 s。本文仿體的制作材料均為與人體組織散射參數接近的聚甲醛[26-27], 650 nm波長下聚甲醛的 和 分別為0.004 mm?1和0.8 mm?1。
2.1 輪廓測量的準確性驗證
本文設計了平板仿體在不同高度和角度下的輪廓測量實驗,實驗結果如圖6所示。對于高度測量,本實驗以平板仿體與基準平面的高度差0 mm為起點,5 mm為步長,利用剪式升降臺線性增加平板仿體的高度,使用FTP獲得了平板仿體在不同高度下的輪廓圖,然后將相同高度下的輪廓均值作為高度測量結果,計算測量結果與真實高度的絕對誤差。對于角度測量,本實驗將平板仿體沿x或y軸旋轉,使其與基準平面呈一定夾角,以平板仿體與基準平面的夾角10°為起點,5°為步長(工業量角器確定夾角),使用FTP獲得了平板仿體在不同角度下的輪廓圖,然后將輪廓圖的法線與光學平臺的夾角作為角度測量結果,計算角度測量結果與真實角度的絕對誤差。
圖6
平板仿體的輪廓測量結果
Figure6.
Profilometry measurements of the slab phantom
從圖6可以看出,隨著平板仿體高度和角度的增加,測量精度不斷下降。對于高度測量,平板仿體位于0~25 mm高度時的絕對測量誤差不超過1 mm、位于30 mm高度時的絕對測量誤差為2.1 mm、位于40 mm高度時的絕對測量誤差達到4.1 mm。對于x方向角度測量,平板仿體與基準平面夾角為0°~35° 時的絕對測量誤差不超過2.2°、夾角為40°時的絕對測量誤差為3.8°、夾角為45°時的絕對測量誤差為8.6°。對于y方向角度測量,平板仿體與基準平面夾角為0°~35° 時的絕對測量誤差不超過2.1°、夾角為40°時的絕對測量誤差為5.4°、夾角為45°時的絕對測量誤差為9.6°。從圖6可總結出,平板仿體的高度超過30 mm后,高度測量的絕對誤差增長較快,平板仿體與基準平面的夾角超過40°后,角度測量的絕對誤差增長較快,根據本實驗可評估出成像系統的高度測量閾值約為30 mm,角度測量閾值約為40°。
2.2 光學參數矯正的準確性驗證
本文比較了平板仿體在不同高度和角度時,輪廓矯正前和矯正后的光學參數測量結果,測量結果為重構光學參數圖像的加權平均。對于輪廓矯正中的高度矯正,本實驗以平板仿體與基準平面的高度差5 mm為起點,5 mm為步長。對于輪廓矯正中的角度矯正,本實驗以平板仿體與基準平面的夾角10°為起點,5°為步長,輪廓矯正前和矯正后的光學參數對比如圖7所示。
圖7
輪廓矯正前后的平板仿體光學參數
Figure7.
The corrected and uncorrected optical parameters of the slab phantom
圖7中,平板仿體與基準平面的高度差為5~30 mm時, 經輪廓矯正后的最大測量誤差從32.50%降至15.00%, 經輪廓矯正后的最大測量誤差從41.25%降至11.25%。平板仿體與基準平面在x方向的夾角為10°~40°時, 經輪廓矯正后的最大測量誤差從46.27%降至6.89%, 經輪廓矯正后的最大測量誤差從72.18%降至10.26%。平板仿體與基準平面在y方向的夾角為10°~40°時, 經輪廓矯正后的最大測量誤差從45.82%降至6.33%, 經輪廓矯正后的最大測量誤差從57.90%降至10.24%。圖7證明了生物組織表面各點與基準平面的高度或角度不相等時會影響光學參數的定量重構結果,輪廓矯正前 的重構結果與高度和角度負相關、 的重構結果與高度和角度正相關,使用本文提出的輪廓矯正方法能有效減少因生物組織表面各點與基準平面高度或角度不相等時引起的光學參數定量重構誤差,使生物組織光學參數的重構結果與真實值更加接近。
2.3 人臉仿體成像的準確性驗證
人臉仿體由3D打印技術制作完成,其最大長、寬、高分別約為5、3、1 cm。人臉仿體的三維輪廓及光學參數成像結果如圖8所示,黑色箭頭指向人臉仿體光學參數的真實值。輪廓最大高度測量誤差為3.59%,出現于鼻尖位置。輪廓矯正前人臉仿體 圖像的平均重構誤差為45.42%,輪廓矯正后人臉仿體 圖像的平均重構誤差為8.03%,可以看出輪廓矯正后邊緣區域的 值與真實值更加貼近,輪廓矯正前和矯正后鼻尖處的 值變化不大,原因可能為FTP對陡峭(突變)位置的測量誤差較大,或輪廓矯正方法對陡峭位置的光學參數矯正誤差較大,造成光學參數重構精度的降低。輪廓矯正前人臉仿體 圖像的平均重構誤差為58.27%,輪廓矯正后人臉仿體 圖像的平均重構誤差為6.85%,可以看出輪廓矯正后總體 值的重構誤差得到明顯降低,部分前額葉區的 值仍與真實值差距較大,原因可能為此區域鏡面反射光的影響。圖8證明了本文提出的輪廓矯正方法面向具有復雜輪廓組織的光學參數重構時,能大幅減少因復雜輪廓的存在引起的光學參數定量提取誤差。
圖8
人臉仿體成像結果
Figure8.
Imaging of a face-like phantom
2.4 在體成像
本文以一名受試者的腦前額葉為試驗對象,驗證了成像系統面向臨床活體組織的實用性。試驗數據采集地為中國醫學科學院北京協和醫學院生物醫學工程研究所,受試者為中國醫學科學院北京協和醫學院生物醫學工程研究所的職工,40歲健康男性,無疾病史,試驗已獲得天津中醫藥大學醫學倫理委員會批準,受試者已簽署知情同意書。為獲取一個輪廓變化明顯的試驗對象,本試驗將受試者腦前額葉左側邊緣區域置于成像系統的采集區域。受試者腦前額葉的三維輪廓及光學參數成像結果如圖9所示,黃色虛框為成像系統的采集區域。輪廓矯正前,梯度變化較大區域的 值變化明顯,頭發部位的 值最大, 值較小,原因在于頭發中的黑色素對光吸收明顯[2]。輪廓矯正后,梯度變化較大區域的 值變化趨于平緩, 圖像更加均勻,與實際情況更加接近。圖9進一步驗證了成像系統能夠將輪廓信息與光學參數重構算法結合,并證明了成像系統在面向活體組織成像時的可靠性和實用性。
圖9
受試者腦前額葉成像結果
Figure9.
Imaging of a human’s prefrontal lobe
3 討論
圖1成像系統采用斜投影(入射角約4°)的方式消除鏡面反射光對數據采集的影響,與采用偏振片消除鏡面反射光的垂直投影方式相比,斜投影方式能夠提高成像系統的性價比和減少數據采集時間,且Erickson等[15]驗證了采用入射角小于5°斜投影方式成像結果與采用垂直投影方式成像結果的偏差小于1%。但斜投影方式僅適用于表面粗糙生物組織的數據采集,且不能完全消除鏡面反射光的影響,因此下一步將在成像系統的光源和相機前端加裝偏振片,采用垂直投影方式完全消除鏡面反射光對數據采集的影響。
上述成像實驗中,成像系統中的相機積分時間均為0.10 s。為評估成像系統的動態應用性能,本文比較了不同相機積分時間的成像結果。實驗對象為圖8中的人臉仿體,成像結果的評估參數為:輪廓測量平均相對誤差(各點高度與真實高度相對誤差的平均值)、輪廓矯正后光學參數圖像平均重構誤差(各點 和 值與真實值相對誤差的平均值)。相機積分時間0.01~0.10 s、步長0.01 s的成像結果評估參數如圖10所示,可以看出隨著相機積分時間的增加,輪廓測量和輪廓矯正后各點光學參數的平均誤差呈下降趨勢,原因在于增加相機積分時間可有效提升測量數據的信噪比。相機積分時間0.01~0.07 s時,輪廓測量、 和 值重構的平均相對誤差下降明顯。相機積分時間0.08~0.10 s時,輪廓測量、 和 值重構的平均相對誤差下降緩慢。可以總結出,在相機積分時間0.10 s的基礎上,繼續增加相機積分時間對提升成像質量的貢獻趨于飽和,反而會降低成像系統的動態應用性能。此外,輪廓測量的平均誤差小于 和 重構的平均相對誤差,可能由于寬場正弦光傳輸模型與實際存在匹配誤差或未考慮投影光路對輪廓矯正的影響所致。 重構的平均相對誤差小于 重構的平均相對誤差,原因可能為本文建立的 映射關系庫中 的步長小于 的步長,使 重構的精度更高。為進一步提升成像質量,下一步可將“適形投影”嵌入成像系統,消除投影光路對輪廓矯正的影響,并在 映射關系庫中減小 和 的步長,提升 和 重構的精度。
圖10
不同積分時間輪廓測量、光學參數圖像重構的平均相 對誤差
Figure10.
Relative errors of profilometry measurements and the optical parameters with different integration times
4 結論
本文針對傳統光學成像技術在輪廓矯正方面的缺陷,提出并研制了一套融合輪廓信息的光學參數成像系統,該系統采用FTP獲取生物組織的輪廓信息,并依據光照度定律矯正生物組織表面各點入射光強差異,最后將生物組織的輪廓信息與SFD成像算法結合,實現了生物組織的光學參數重構。平板仿體實驗評估了輪廓測量和光學參數重構的精度,驗證了輪廓矯正方法的有效性。實驗結果表明,輪廓測量精度較高,輪廓矯正前的光學參數重構誤差較大,將輪廓矯正融入光學參數重構算法能顯著降低光學參數的定量重構誤差。人臉仿體實驗和受試者腦前額葉成像試驗驗證了成像系統面向具有復雜輪廓生物組織時的可靠性和實用性,證明了成像系統的應用潛力。不同測量時間下的成像結果評估了成像系統的動態應用性能,證明了成像系統能在較短時間內獲得生物組織的輪廓信息和光學參數圖像。本文提出的成像系統具備快速獲取具有復雜輪廓生物組織光學參數圖像的臨床應用價值,同時本文提出的輪廓矯正方法可與現有光學成像技術結合,減少生物組織表面輪廓對成像質量的影響。
重要聲明
利益沖突聲明:本文全體作者均聲明不存在利益沖突。
作者貢獻聲明:李同心負責數據采集、程序編寫、論文寫作及修改;董葉青負責文獻檢索和論文初稿撰寫;劉明負責數據分析指導;趙靜負責項目主持及實驗指導;李明慧和李研哲參與文獻檢索、論文校對和定稿。
倫理聲明:本研究通過了天津中醫藥大學醫學倫理委員會的審批(批文編號:TJTCM20190301)。