生物(如蜜蜂)觸角作為自然界最高效的感測系統,研究其感知機制是仿制高性能傳感技術的關鍵。針對觸角感知機制研究過程中存在的實驗過程非標準化、手動操作干擾與效率低等問題,本文開發了一種適用于采集生物觸角電信號(含觸角反應時間信息)的自動化實驗裝置。首先,針對實驗中昆蟲頭部的自動識別定位問題,建立了昆蟲頭部輪廓特征的圖像模板,對昆蟲頭部實現了基于豪斯多夫(Hausdorff)法的模板匹配。然后,針對昆蟲頭部相對于標準檢測位置的角度偏差問題,提出了基于長軸最小外接矩形的昆蟲頭部中軸線角度計算方法。最終,通過生物觸角電信號采集裝置采集得到昆蟲觸角接觸試劑時產生的電信號。本文以蜜蜂為研究對象,實驗結果表明:利用模板匹配可實現對蜜蜂頭部準確率95.3%的快速匹配定位,蜜蜂頭部的位姿角度糾正誤差小于1°;觸角與實驗試劑的接觸距離能夠滿足觸角感知機制實驗的要求;采集得到蜜蜂觸角對蔗糖溶液的接觸反應時間等參數與人工實驗得到的結果一致。該系統在無人干擾的狀態下實現了生物觸角接觸信號的有效采集,提高了生物觸角感知機制實驗的標準化水平,為研究與分析生物觸角感知機制中所涉及的生物觸角反應時間提供一種實驗方法與裝置。
引用本文: 王佳佳, 邢強, 姬科舉, 王文波, 朱龍彪. 基于模板匹配的生物觸角電信號采集系統. 生物醫學工程學雜志, 2022, 39(4): 767-775, 783. doi: 10.7507/1001-5515.202112049 復制
版權信息: ?四川大學華西醫院華西期刊社《生物醫學工程學雜志》版權所有,未經授權不得轉載、改編
引言
觸角具有高精度和高靈敏度的感知特性,常被生物用于覓食、捕食和配偶識別等活動。研究生物觸角的感知機制有助于了解生物的生存繁衍,通過分析觸角的反應時間、接觸行為等特性,可為提高人工傳感器的精度和靈敏度提供解決方案[1-2]。
在生物觸角的感知行為及味覺特性研究中,Haupt[3-4]分析了蔗糖刺激下蜜蜂的喙伸反應(proboscis extension reflex,PER)和觸角的行為,發現蜜蜂觸角對不同濃度蔗糖溶液的接觸行為存在差異。Guiraud等[5]研究了蜜蜂觸角的味覺特性,發現蜜蜂觸角的味覺功能有限并且無法區分苦味物質和水。Zhao等[6]設計了四通道迷宮裝置,從生理學的角度分析出蜜蜂觸角對不同揮發物的敏感程度。上述研究表明,生物的觸角不僅能辨別各種氣味[7],而且能夠感受到溫度、光和振動的變化[8],研究生物觸角的感知機制能夠推動仿生高端傳感器的發展。例如:唐軍等[9]根據飛蛾觸角導航的原理,設計出一種基于飛蛾觸角模型的仿生導航傳感器;Zhu等[10]通過分析觸須的傳感機制,設計了檢測水流量的觸摸傳感器;謝清華等[11]和李明義等[12]利用類似昆蟲觸角的傳感器,使機器人具有觸覺感知避障功能。但是目前在觸角感知行為的研究中通常采用人工實驗方式,導致實驗工作量大,檢測結果易受到人為因素的影響,因此開發抗干擾的自動化實驗平臺對提高觸角感知機制實驗的標準化水平和效率有重要意義。
基于非接觸式數字圖像采集處理技術的生物監測儀器被廣泛用于測量和分析生物的行為[13-15]。例如:Shokaku等[16]開發了自動轉盤型迷宮裝置,利用圖像記錄的方式研究球潮蟲(pill bug)的轉彎行為;Liao等[17]開發了高速攝像機采集系統,記錄蜜蜂在攝食干糖時舌頭的行為,從而研究其攝食機制;Chole等[18]開發了一個基于高頻運動捕捉原理的蜜蜂觸角運動跟蹤系統,記錄觸角對不同氣體的反應。上述研究表明,利用圖像處理技術的生物行為研究裝置,能夠有效解決人工實驗存在的主觀定性的問題,從而達到精確、靈活地檢測和分析生物行為的目的。
利用機器視覺反饋信息調整觸角與試劑的相對位置,是保證觸角感知機制實驗過程一致性的可靠方式。本文將設計一種基于模板匹配的生物觸角接觸電信號的采集系統,實現對實驗昆蟲頭部區域的快速定位。同時展開關于生物觸角對不同濃度蔗糖溶液的感知機制的研究,驗證該系統在采集生物觸角接觸參數(如接觸的持續時間、時間間隔及接觸頻次)等信息時的有效性,為研究與分析生物觸角感知機制中所涉及的生物觸角接觸參數提供一種實驗方法和裝置。
1 系統總體設計
1.1 系統的硬件組成
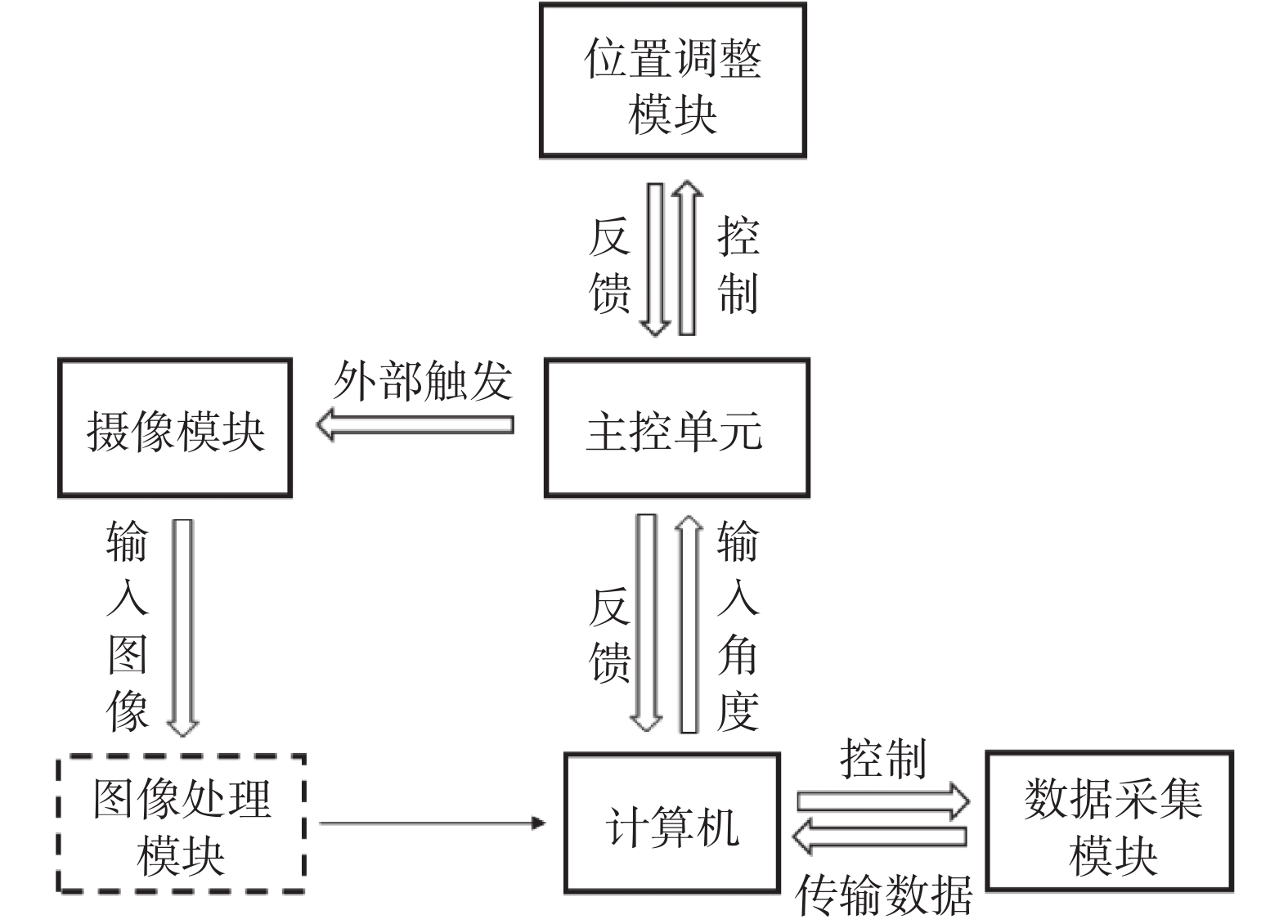
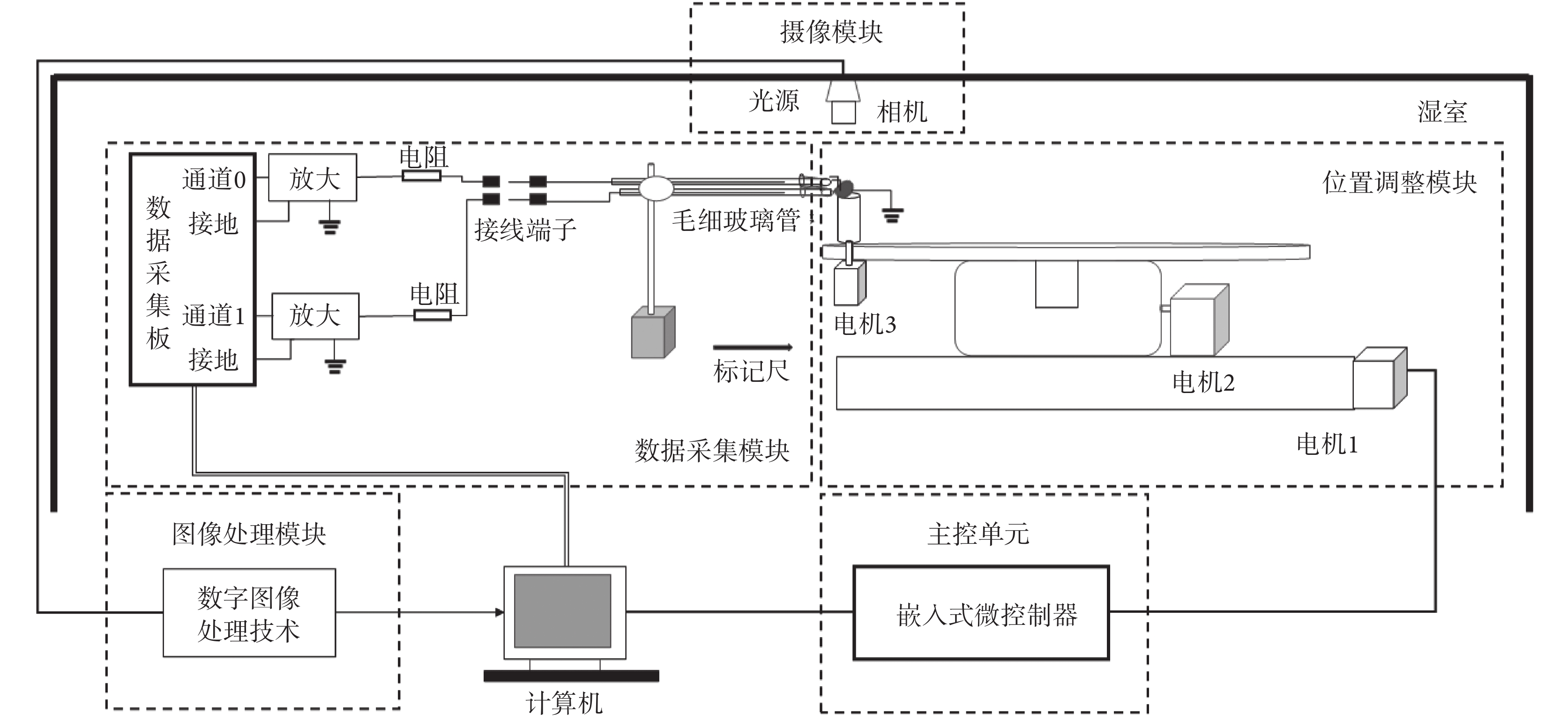
生物觸角電信號采集系統主要由五個部分組成:攝像模塊、圖像處理模塊、位置調整模塊、主控單元和數據采集模塊,如圖1所示。攝像模塊由相機和同軸紅外光源組成,用于圖像信息的采集;圖像處理模塊主要利用基于計算機的數字圖像處理技術,實現昆蟲頭部特征信息的預處理、匹配及昆蟲頭部的位置檢測;位置調整模塊主要由自動平移臺、旋轉臺和電機組成,根據圖像處理模塊反饋的位置參數實現昆蟲觸角的位置調整;主控單元為嵌入式微控制器,實現各模塊信號接收、決策及電機控制;數據采集模塊由電流前置放大器、數模轉換器及上位機數據采集軟件等組成,負責采集、分析昆蟲觸角與溶液接觸時的信號。系統的組成示意如圖2所示。
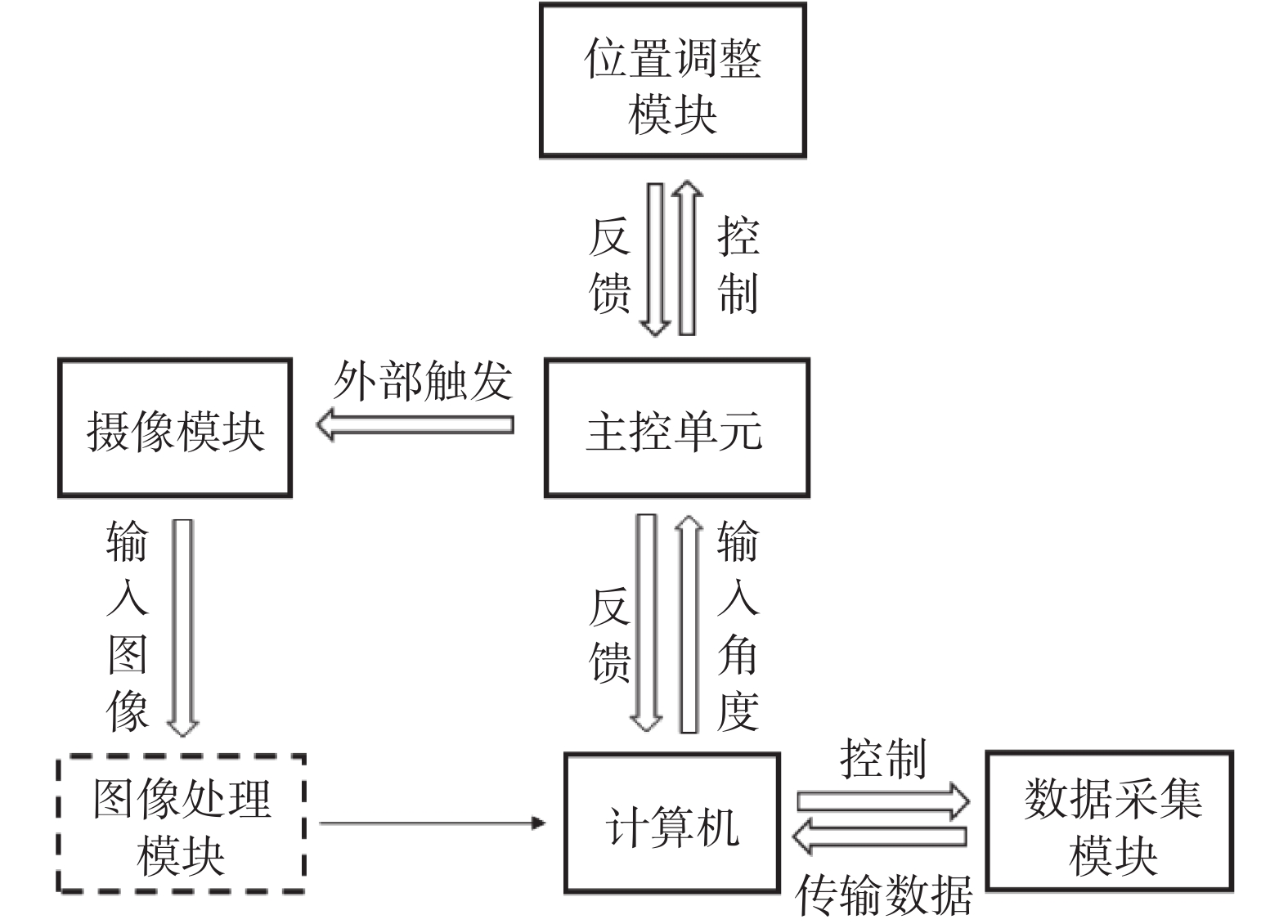 圖1
系統結構
Figure1.
System structure
圖1
系統結構
Figure1.
System structure
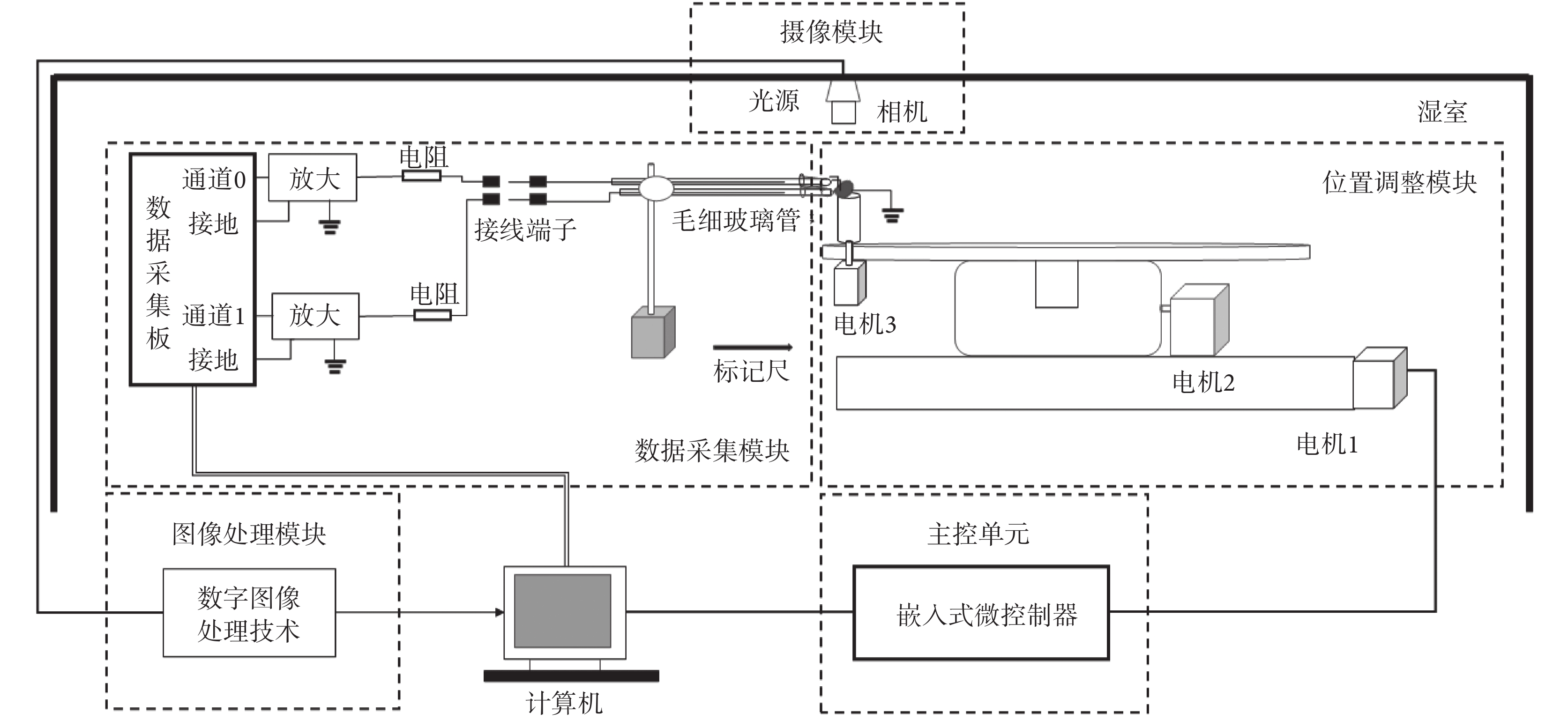 圖2
系統的組成
Figure2.
System composition
圖2
系統的組成
Figure2.
System composition
1.2 圖像處理模塊
圖像處理模塊利用數字圖像處理算法確定生物特征區域,從而為執行機構提供相關位置參數,包括:目標圖像的預處理、特征圖像模板的建立與匹配以及基于最小外接矩形的特征位置檢測等功能。
1.2.1 目標圖像的預處理
在具有紅外光源的封閉暗室中采集含有蜜蜂頭部的目標圖像。首先利用自適應閾值法處理圖像I源圖的前后景信息并進行二值化。然后采用魯棒性較強的中值濾波法對二值圖像進行去噪處理,去除由光照不均、蜜蜂頭部毛發等產生的噪聲干擾。最后對經上述圖像處理后的同一位置的兩張二值圖像進行像素間的邏輯與運算、開運算等操作,從而得到蜜蜂頭部感興趣區域的特征圖像。
在建立昆蟲頭部特征模板和昆蟲活體檢測的過程中,均需對無觸角的昆蟲頭部圖像I'源圖 和活體昆蟲的待測圖像I源圖 進行圖像預處理,并分別獲得建立模板的特征圖像I模板 或者用于檢測的待匹配特征圖像I待測。
1.2.2 特征圖像模板的建立與匹配
(1)特征圖像模板的建立。目標檢測的準確性與所建立的模板質量直接相關,而在實驗過程中即使是選用同種昆蟲,其頭部也會存在大小、形狀等差異,但是由于蜜蜂頭部的總體特征相似,因此仍然可以建立相應的特征圖像模板。
搭建具有明顯的前景(蜜蜂頭部灰黑色)和后景(實驗平臺白色)間的顏色關系的實驗平臺,并利用商業圖像處理軟件VisionMaster 4.0.0(杭州海康機器人技術有限公司 Inc.,中國)的模板匹配功能模塊建立蜜蜂頭部特征的模板庫,具體步驟如下:① 對目標圖像進行預處理,提取蜜蜂頭部的感興趣區域;② 人工配置特征圖像I模板 的模板參數——如設置初搜模板目標的速度尺度、尺度模式以及對比度閾值等參數,確定特征尺度并修正初搜結果的位置;③ 提取特征圖像I模板 的邊緣特征,建立特征圖像模板;④ 為了提高模板匹配的準確性,隨機選擇同一蜂巢內的數只蜜蜂(經篩選后的蜜蜂存在大小差異),剪掉其觸角,重復上述步驟,建立生物頭部的二值圖像集{I模板}。
(2)特征圖像模板的匹配。選擇豪斯多夫(Hausdorff)算法進行基于邊緣特征的目標匹配[19],實現對采集圖像中特征區域位置的快速確定。算法過程如下:假設兩個有限點集分別為A = {a1, a2,  , ap},B = {b1, b2,
, ap},B = {b1, b2,  , bq},則定義A和B之間的Hausdorff距離如式(1)所示:
, bq},則定義A和B之間的Hausdorff距離如式(1)所示:
 |
式中,H(A, B)為點集A和B的Hausdorff距離;h(A, B)為A到B的有向Hausdorff距離,如式(2)所示;h(B, A)為B到A的有向Hausdorff距離,如式(3)所示:
 |
 |
式中,ai和bj分別為有限點集A、B中的點,其中i = 1, 2,  , p且j = 1, 2,
, p且j = 1, 2,  , q;
, q; 表示點集A和B間的距離范數。
表示點集A和B間的距離范數。
通過計算模板圖像I模板 的輪廓與待匹配圖像I待測 的輪廓之間的Hausdorff距離,判斷兩者的相似性,實現昆蟲頭部特征的自動匹配以及感興趣區域的定位、分割。
1.2.3 基于最小外接矩形的特征位置檢測
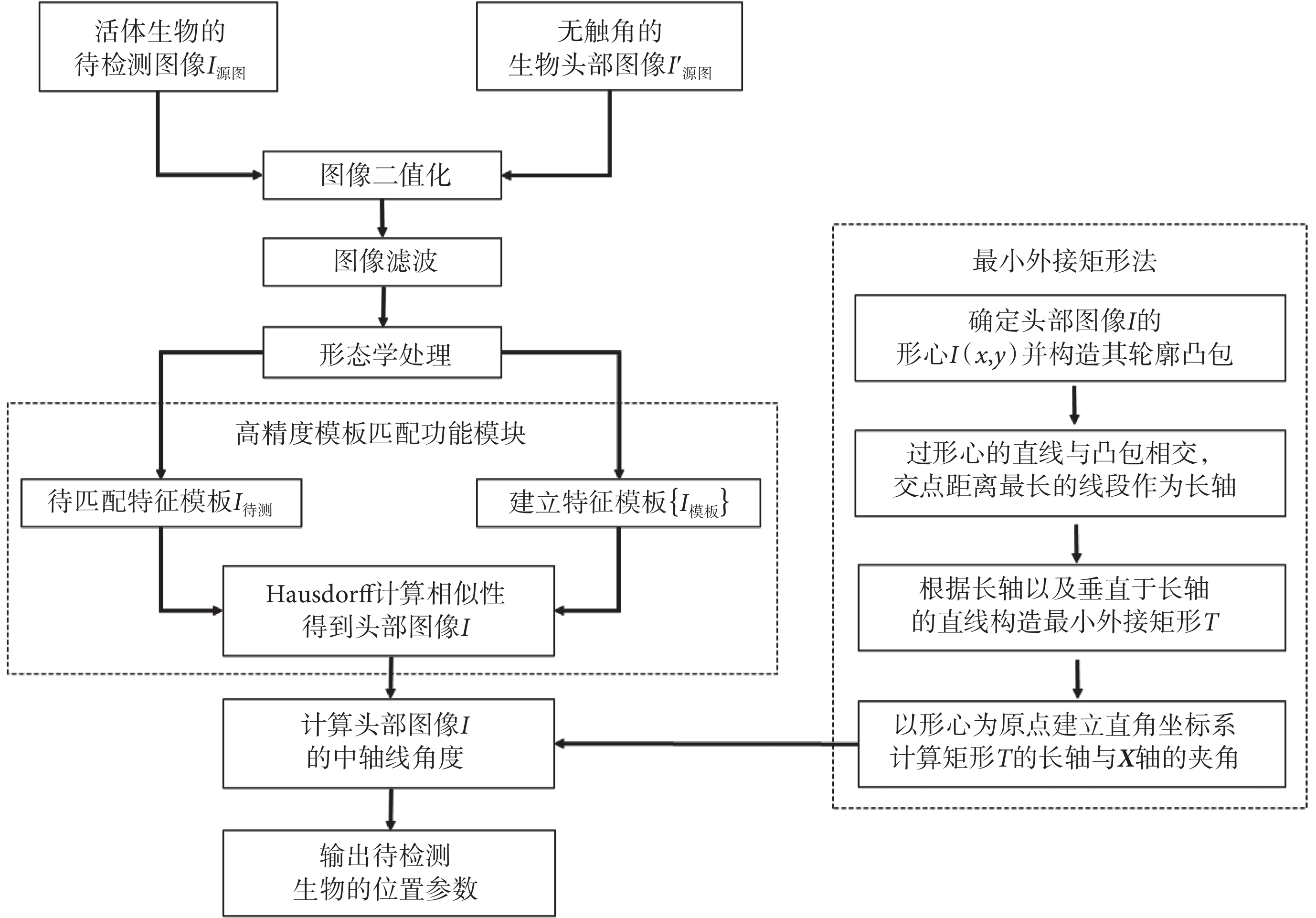
根據蜜蜂頭部的左右對稱性、口器部分處于長軸方向等形態特征,可采用蜜蜂頭部長軸方向表示蜜蜂頭部中軸線方向。但是由于蜜蜂頭部輪廓存在凹陷,所以在檢測頭部朝向時,采用格雷厄姆(Graham)掃描算法構造昆蟲頭部凸包,并結合遍歷輪廓凸包邊的方式構造最小外接矩形[20-21],從而根據蜜蜂頭部輪廓最小外接矩形的矩形長軸方向,快速、準確地得到蜜蜂頭部輪廓中軸線方向,以及計算其與圖2中標記尺的位置偏差。圖像處理具體步驟如下:① 基于上述模板匹配法,從圖像I待測中提取目標頭部的特征二值圖像I,確定其形心I(x, y),并構造二值圖像I的輪廓凸包;② 過形心的直線與輪廓凸包相交得到兩個交點,當兩點的距離最長時,確定該直線為蜜蜂頭部的中軸線;③ 將該線段作為最小外接矩形的長軸,將垂直于該長軸且與輪廓交點距離最長的線段作為短軸,構造最小外接矩形T;④ 以形心為坐標原點建立直角坐標系,計算矩形T的長軸與所建立的坐標軸系X軸的夾角。具體流程如圖3所示。
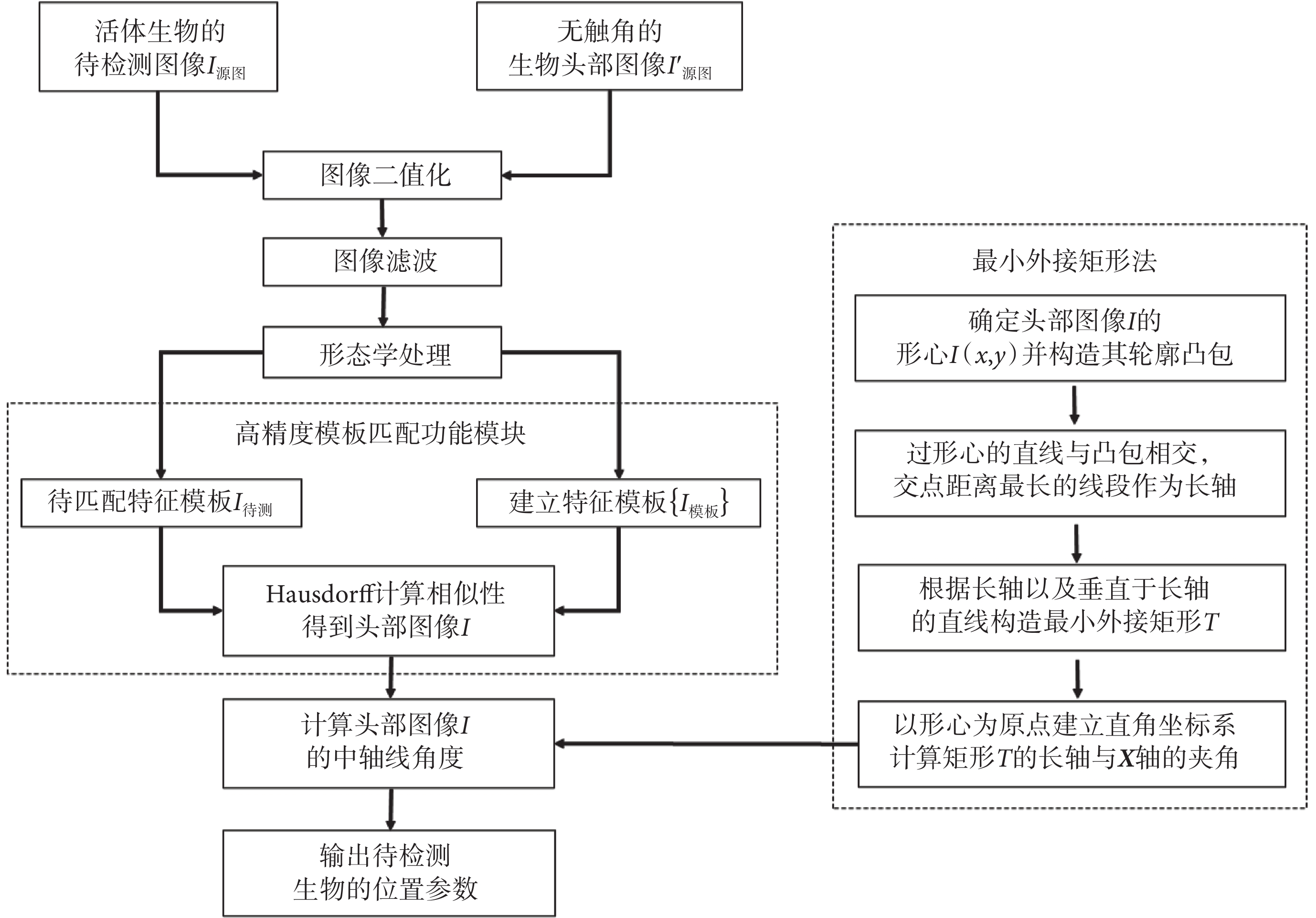 圖3
圖像處理流程圖
Figure3.
Image processing flow
圖3
圖像處理流程圖
Figure3.
Image processing flow
1.3 位置調整模塊
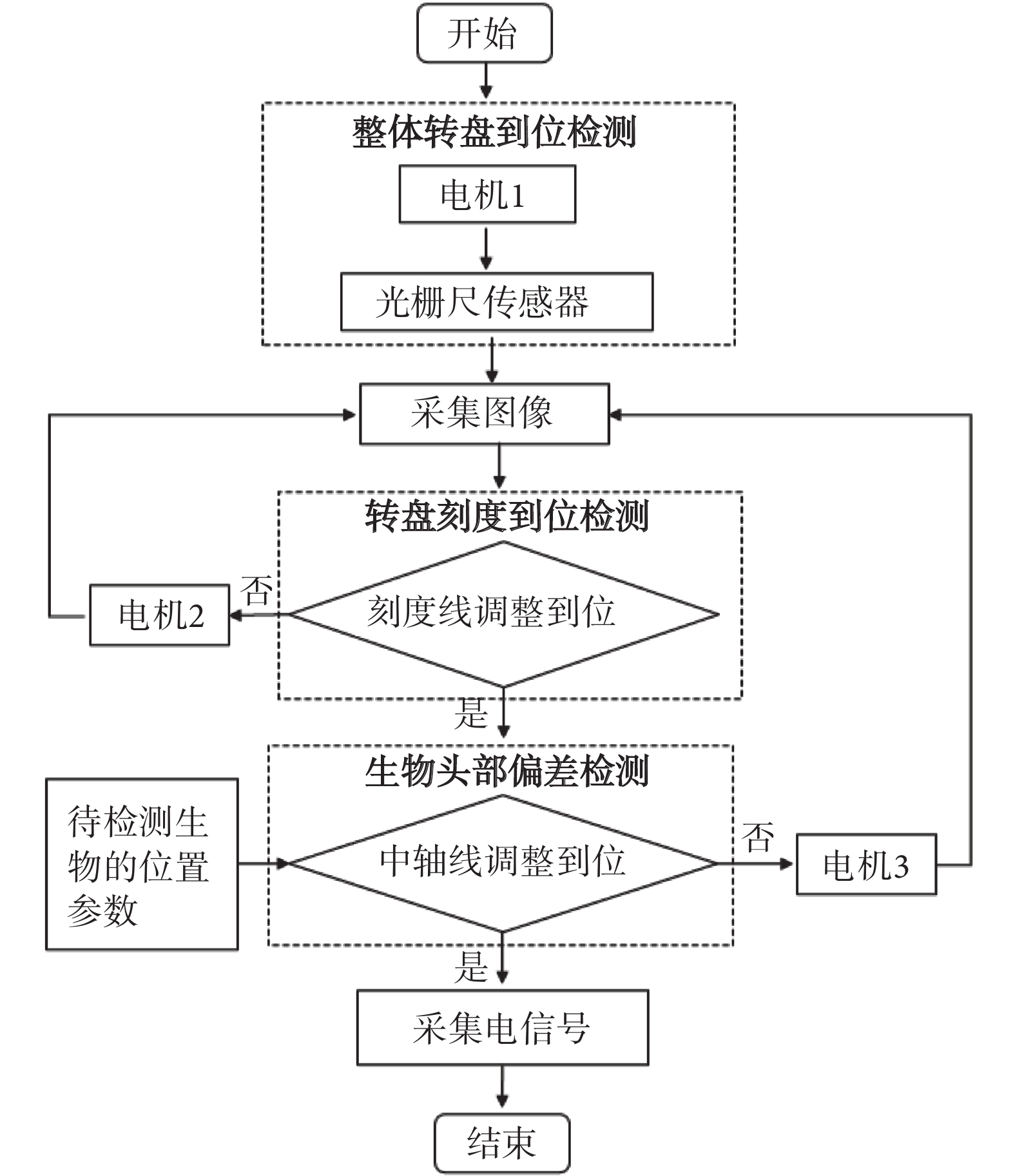
位置調整模塊主要是根據圖像處理模塊反饋的昆蟲頭部位置參數,實現對昆蟲觸角位置的調整,從而保證不同批次的實驗對象(蜜蜂)在觸角感知特性實驗過程中所處位置具有一致性,即保持昆蟲頭部與測試試劑之間的幾何位置關系一致。具體過程包括:① 利用自動平移臺ZST4001G(中天光正科技有限公司 Inc.,中國)帶動自動旋轉臺ZRC36010WD(中天光正科技有限公司 Inc.,中國)對待測對象在水平方向以及角度方面進行調整,其位置調整結果由光柵傳感器JCXE-DK(貴陽新天光電科技有限公司 Inc.,中國)進行反饋,從而使得裝載有實驗昆蟲(蜜蜂)的工位移動到檢測區域內;② 根據圖像處理模塊反饋的位置參數,利用單片機STM32(意法半導體有限公司 Inc.,瑞士)控制步進電機實現實驗昆蟲(蜜蜂)頭部中軸線與預設參考刻度線的對齊,從而滿足觸角感知機制實驗對蜜蜂位置與測試試劑間的幾何位置的要求;③ 利用數據采集模塊采集觸角接觸溶液時的接觸信號。整體流程如圖4所示。
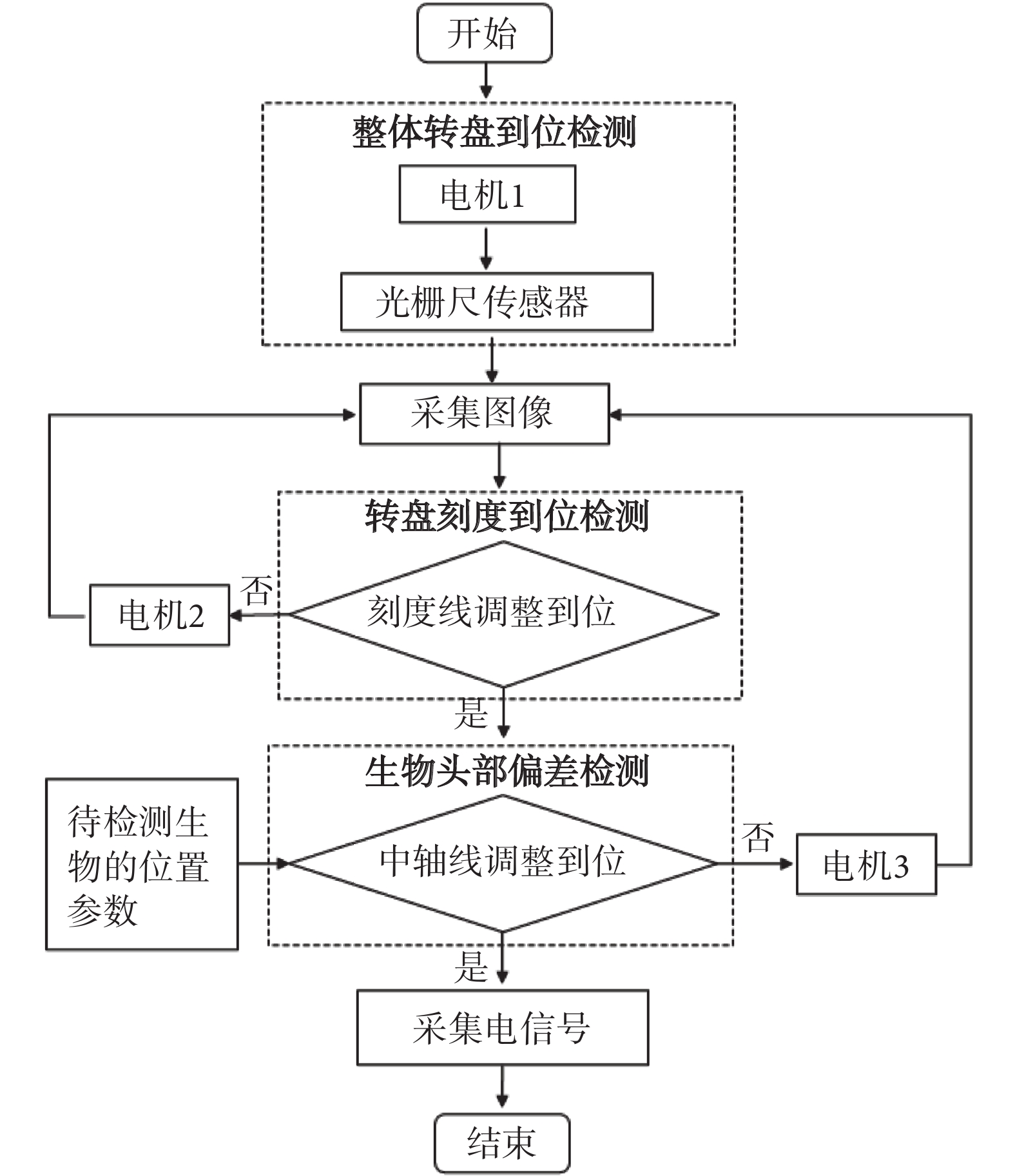 圖4
系統檢測流程圖
Figure4.
Flowchart of the detection system
圖4
系統檢測流程圖
Figure4.
Flowchart of the detection system
1.4 信號采集與分析模塊
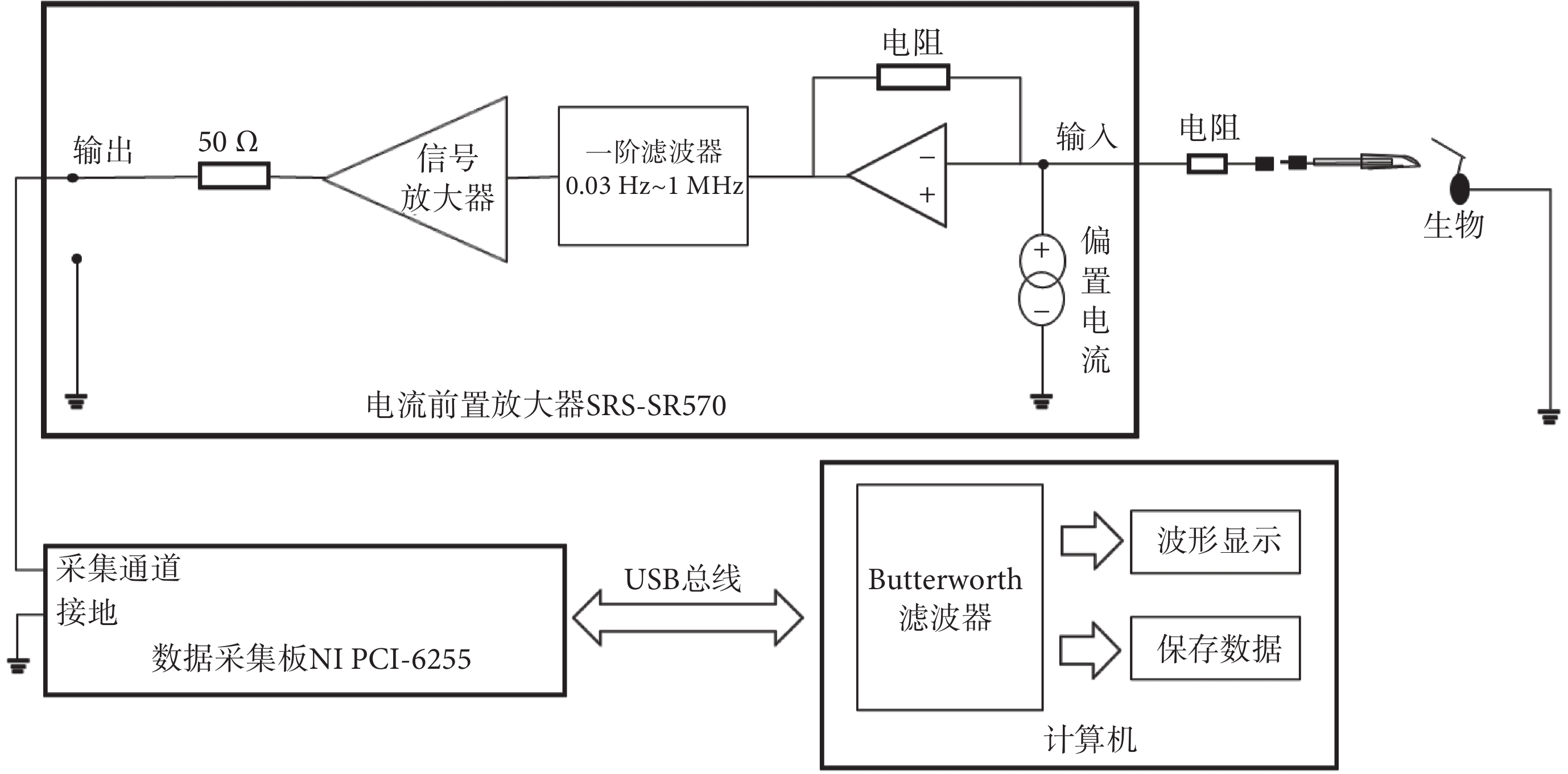
高精度的數據采集系統可以獲得昆蟲觸角接觸溶液時的接觸參數(如接觸的持續時間、時間間隔及接觸頻次),能夠實現對蜜蜂觸角接觸蔗糖溶液時產生的接觸電信號的采集[3]。主要包括:① 搭建昆蟲觸角接觸溶液的檢測電路。由于本文實驗對象(蜜蜂)的電阻值要小于人體電阻值(一般為1~3 kΩ)[22],為降低觸角接觸時的放電現象對昆蟲觸角接觸溶液行為的影響,利用電流前置放大器SRS-SR570(Standford Research Systems Inc.,美國)提供皮安(pΑ)級別偏置電流,并在電路中串聯千歐姆(kΩ)級的電阻,以減少電流對昆蟲的影響[23-26];② 信號濾波與放大。昆蟲復眼被涂抹遮擋,其觸角通過自由擺動隨機接觸溶液,由于當昆蟲觸角與溶液接觸時會形成接觸信號回路且時間短促,因此選用電流前置放大器SRS-SR570進行觸角接觸試劑時接觸電信號的濾波和放大,并實現信號的傳輸;③ 信號的采集與處理。針對所放大的信號,利用軟件開發平臺NI LabVIEW 2016(National Instruments Inc.,美國)以及具備16位高分辨率的數據采集板NI PCI-6255(National Instruments Inc.,美國)進行電信號的采集與處理。信號采集的工作原理如圖5所示。
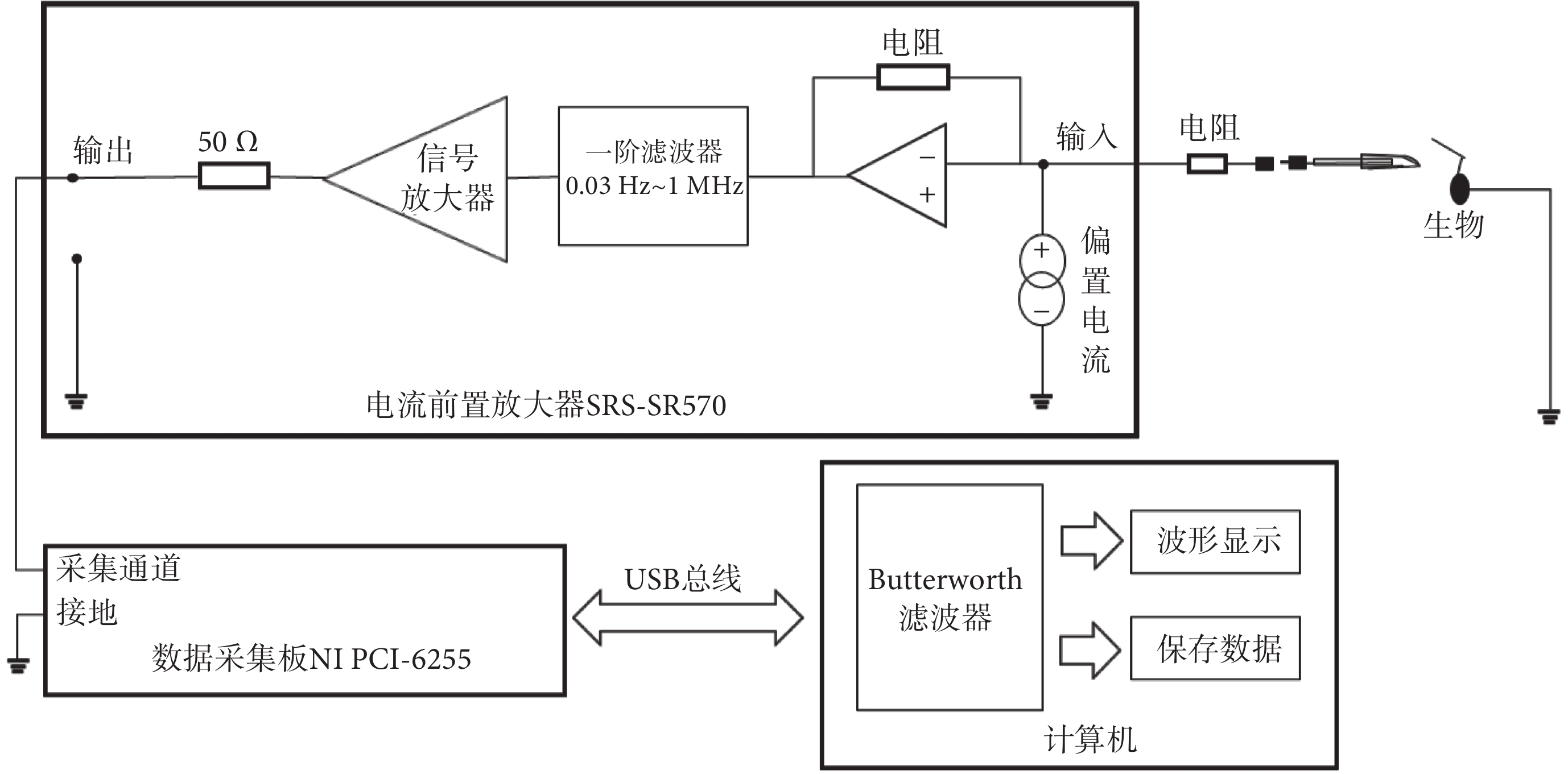 圖5
電信號采集示意圖
Figure5.
Electrical signal acquisition
圖5
電信號采集示意圖
Figure5.
Electrical signal acquisition
為過濾電信號采集過程中存在的電極噪聲、電路噪聲以及觸角所引起的噪聲等[27],選擇軟件開發平臺NI LabVIEW 2016中的巴特沃斯(Butterworth)低通濾波器對電信號進行二次濾波,Butterworth低通濾波器原理如式(4)所示:
 |
式中,H(u, v)為Butterworth低通濾波器的傳遞函數,D(u, v)為截止頻率,D0為通帶半徑,n為階數(本實驗中選擇截止頻率為20 Hz,n = 3)。
2 系統測試與實驗分析
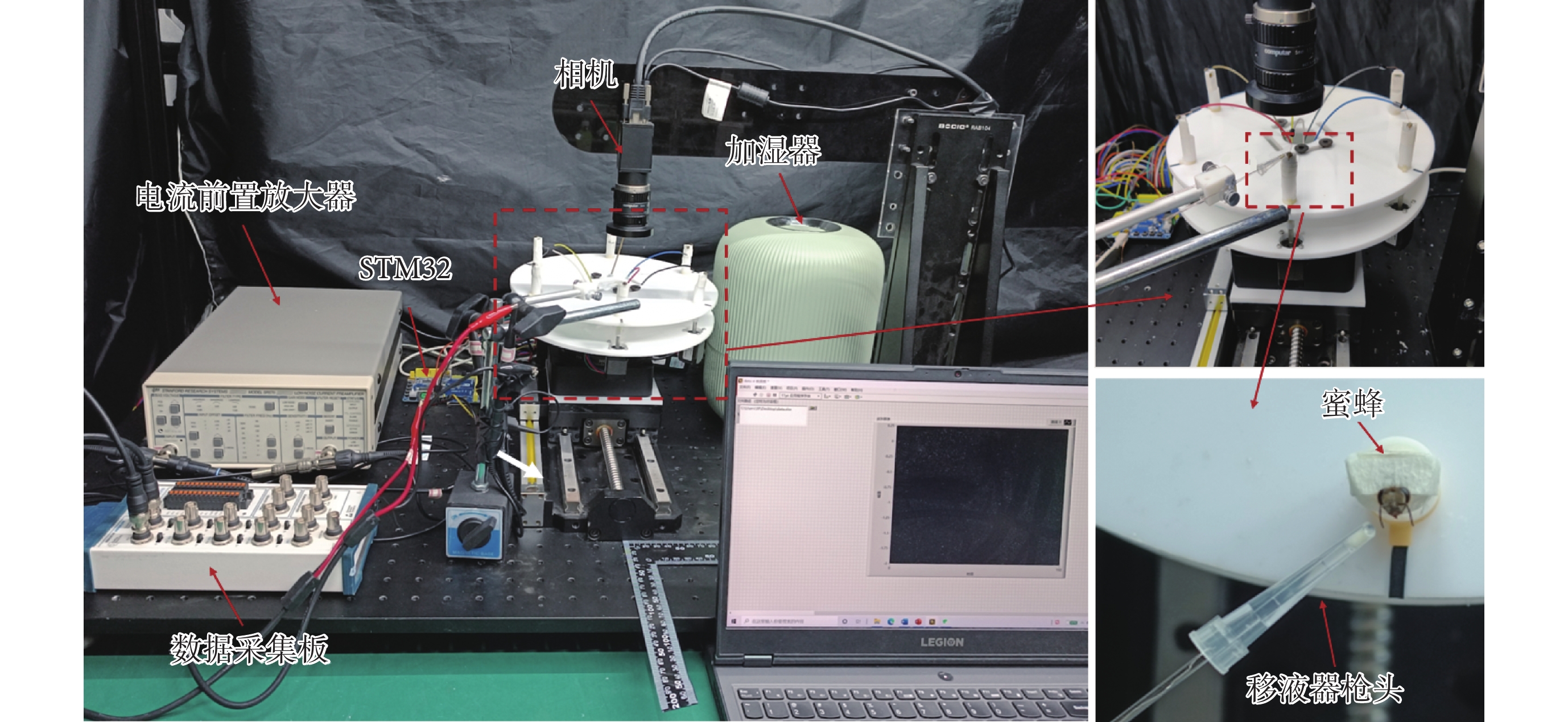
為驗證上述裝置的可靠性與檢測精度,設計了蜜蜂觸角的蔗糖感知機制實驗,實驗裝置如圖6所示。實驗中選用工業相機(MV-CA060-10GM,杭州海康機器人技術有限公司 Inc.,中國)以及商業圖像處理軟件VisionMaster 4.0.0進行圖像采集與處理,而昆蟲頭部的位置通過微型電機進行調整,整個裝置安裝暗室環境中。實驗蜜蜂為南通大學農業部南方平原玉米科學觀測站長期保種的東方蜜蜂中華亞種中的工蜂,體長約10~13 mm,飼養于室外標準的活框蜂箱中。
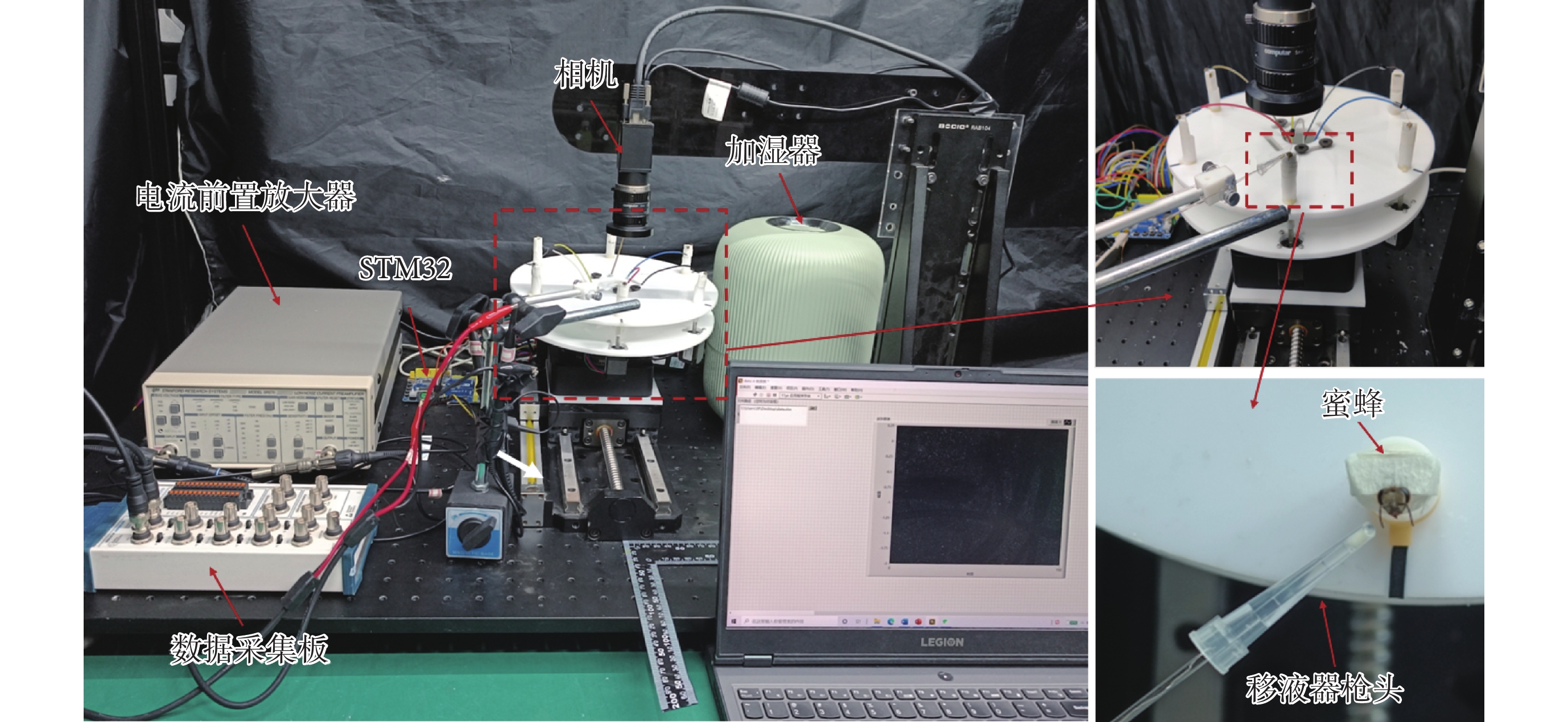 圖6
生物觸角電信號采集系統
Figure6.
Antennal electric signal acquisition system
圖6
生物觸角電信號采集系統
Figure6.
Antennal electric signal acquisition system
2.1 實驗系統的圖像定位效果和精度評價
2.1.1 模板匹配的精度分析
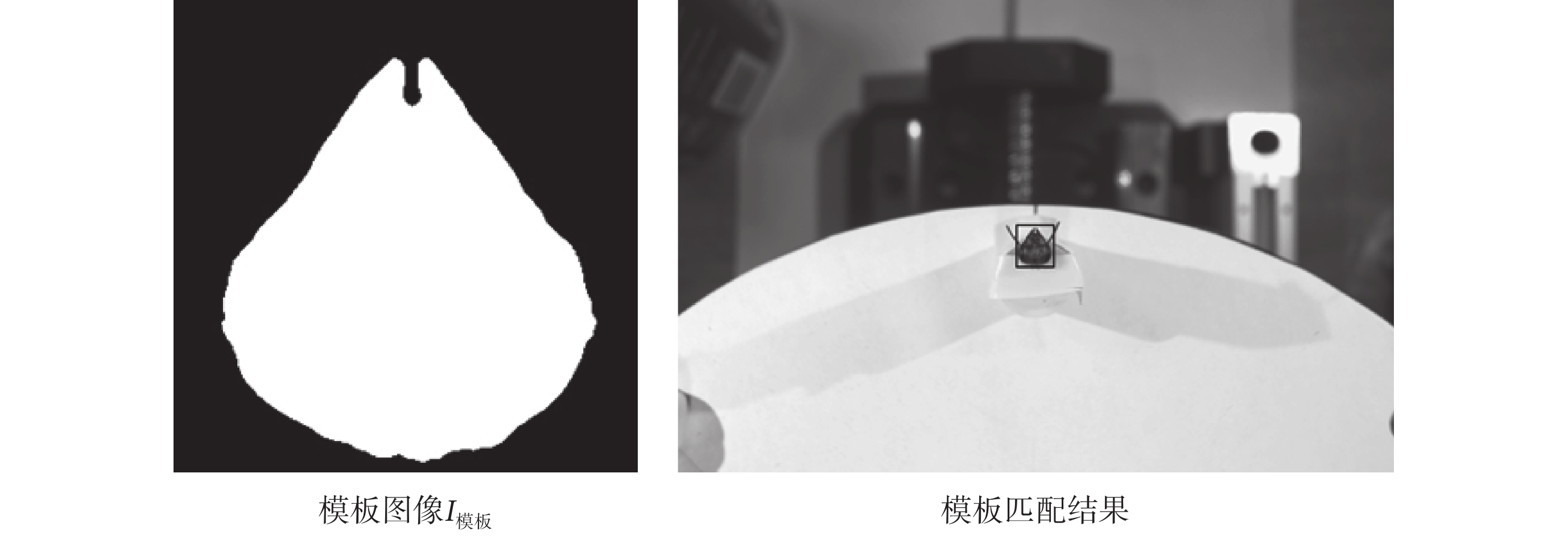
如圖7所示建立蜜蜂頭部的特征模板I模板,利用采集的150張活體蜜蜂的待檢測圖像{I源圖}進行模板匹配實驗,從而比較分析模板匹配算法的有效性。由于基于邊緣特征的模板匹配算法不易受光照等因素的影響,并且在提取蜜蜂的頭部特征前對圖像進行了預處理等操作,以提高圖像算法處理的魯棒性,從而減少誤匹配的概率。針對相同的采集圖像{I源圖},該方法與基于灰度的匹配算法相比較,在匹配準確率上有所提高,其結果如表1所示。其中,匹配準確率如式(5)所示:
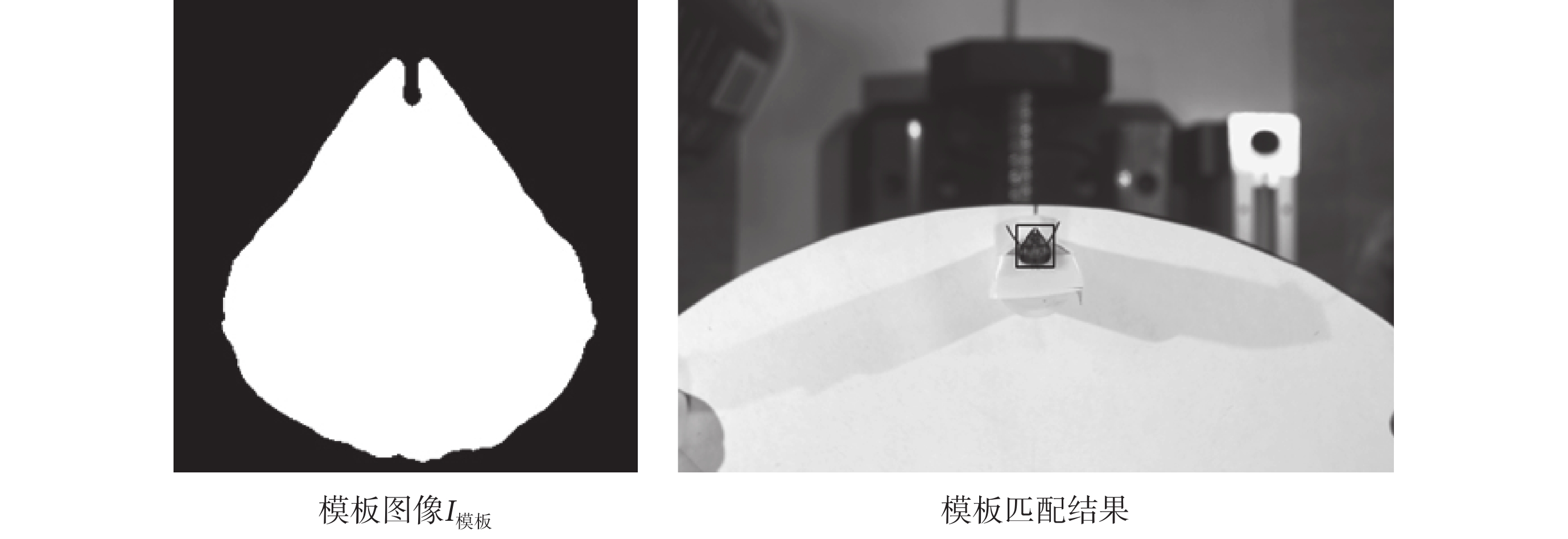 圖7
檢測結果
Figure7.
Detection results
圖7
檢測結果
Figure7.
Detection results
 |
式中,MA為蜜蜂頭部三角區識別的準確率,MS為蜜蜂頭部三角區準確識別的圖片個數,M為蜜蜂頭部圖片總數。
2.1.2 圖像定位效果分析
蜜蜂頭部中軸線的提取過程如圖8所示。首先針對活體蜜蜂的待檢測圖像I源圖,采用模板匹配方法定位蜜蜂頭部區域,得到用于蜜蜂頭部中軸線定位的二值圖像I1、I2。然后對圖像I1、I2進行圖像預處理操作,提取蜜蜂頭部輪廓。其次基于最小外接矩形法得到該輪廓的最小外接矩形T。最后根據最小外接矩形的長軸位置得到待檢測圖像I源圖 中活體蜜蜂頭部的中軸線Lc,從而為位置調整模塊提供蜜蜂觸角的位置調整參數。
 圖8
圖像處理效果圖
Figure8.
Effect of image processing
圖8
圖像處理效果圖
Figure8.
Effect of image processing
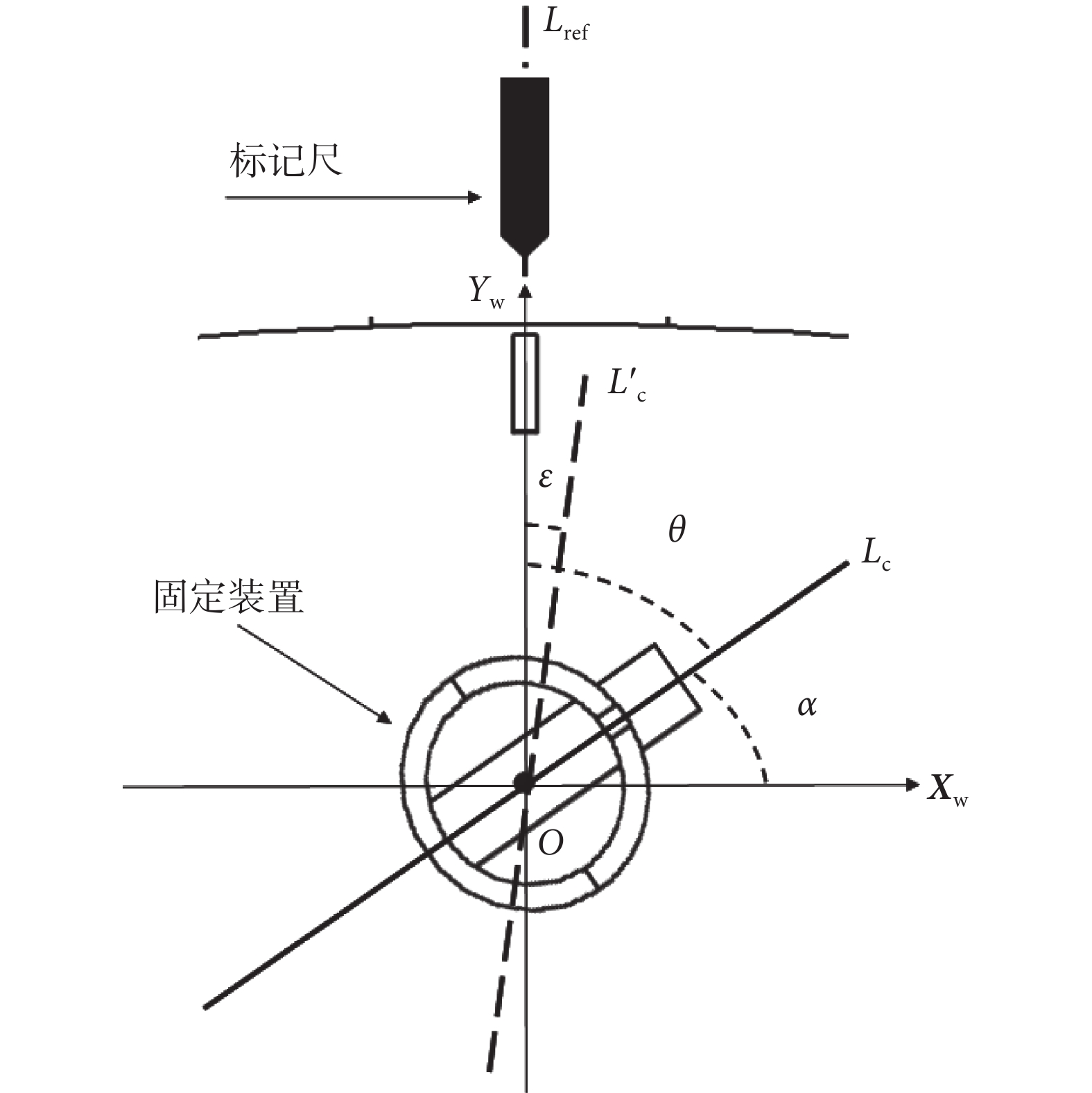
為檢測基于模板匹配的電信號采集系統的調整精度,設置如下實驗:① 建立如圖9所示的坐標系XwOYw,設置標記尺(Lref)位置,使得標記尺(Lref)的方向通過旋轉臺轉盤的中心,且與Yw軸在同一直線上,并規定以Xw軸正方向為起始,逆時針轉過的角度為正角,反之為負角;② 將裝有蜜蜂的固定裝置放置于旋轉臺轉盤上,利用最小外接矩形法提取蜜蜂頭部的中軸線(Lc),獲得其在坐標系中的角度α(0° ≤ α < 360°);③ 計算中軸線(Lc)與標記尺(Lref)間的夾角θ(θ = 90° ? α),將θ作為位置調整模塊的反饋調整參數;④ 根據角度反饋參數,位置調整模塊調整蜜蜂頭部中軸線朝向,并計算調整后的蜜蜂頭部中軸線(L'c)與標記尺(Lref)間的夾角ε(即位置調整偏差角);⑤ 重復上述 ①~④ 的實驗步驟,分別調整當蜜蜂中軸線(Lc)處于四個不同位置時的角度α,并計算調整后的角度偏差ε,示意如圖9所示。實驗結果表明:蜜蜂經過基于視覺檢測反饋的位置調整模塊調整后,其頭部中軸線與標記尺的最大位置調整偏差角為0.4°,在該角度偏差范圍內蜜蜂觸角能夠在自由擺動的情況下接觸實驗溶液,檢測結果如表2所示。
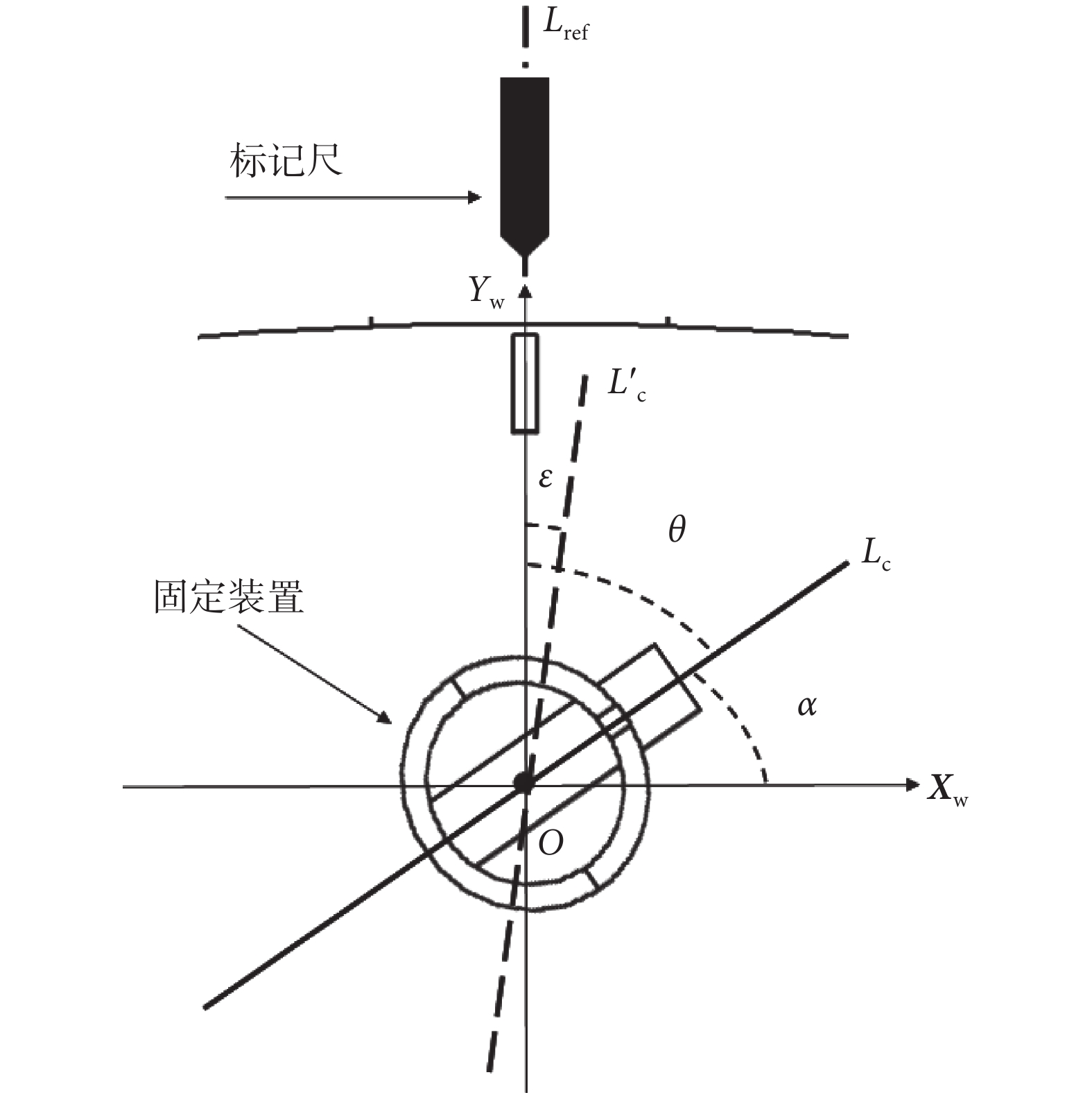 圖9
檢測位置示意圖
Figure9.
Detected locations
圖9
檢測位置示意圖
Figure9.
Detected locations
2.2 昆蟲觸角電信號采集的可靠性分析
2.2.1 蜜蜂的篩選
實驗當天上午,從蜂箱出口處捕捉N(N = 20)只歸巢的蜜蜂,將其放置在溫度4~7 ℃的冰箱內,直至蜜蜂進入休眠狀態后取出,并用黑色涂料對蜜蜂的復眼進行覆蓋涂抹。
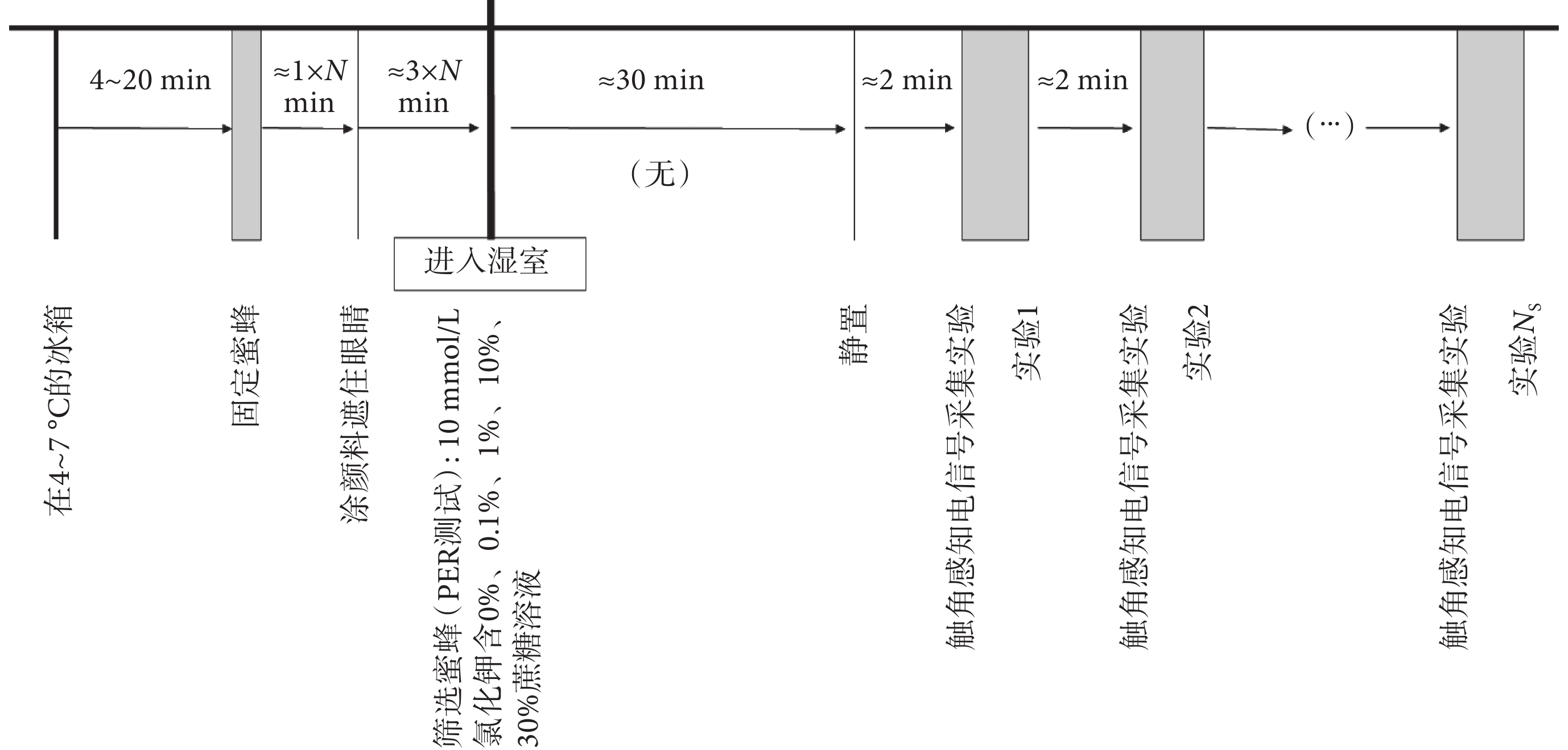
將蜜蜂固定于具有編號的固定裝置中,分別采用不同濃度的蔗糖(分別為0%、0.1%、1%、10%、30%)和氯化鉀(濃度為:10 mmol/L)的混合溶液對蜜蜂進行PER測試。PER測試主要包括:① 剔除對含30%蔗糖的氯化鉀混合溶液無PER反應的蜜蜂;② 剔除對不含蔗糖的氯化鉀溶液有PER反應的蜜蜂。選用30%濃度的蔗糖溶液喂食通過PER測試的其余蜜蜂[28],然后將蜜蜂置于濕度為70%的箱子內,靜止30 min后進行實驗。鑒于蜜蜂觸角的偏側性[29],在此選擇蜜蜂的右側觸角進行實驗,經過實驗測試及篩選,獲得NS(NS < N)只符合條件的蜜蜂。實驗流程及時序圖如圖10所示。
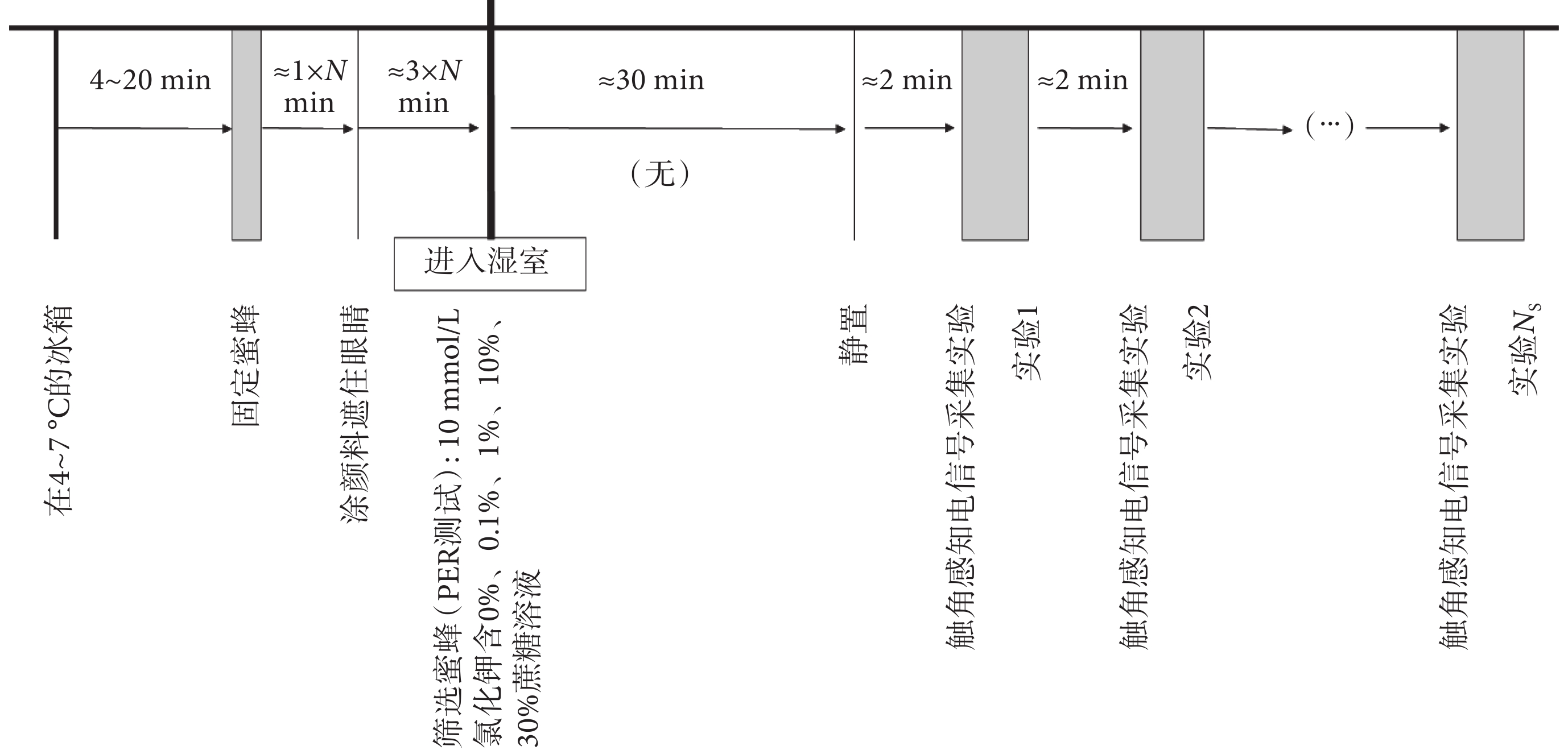 圖10
觸角感知機制實驗流程時序圖
Figure10.
Sequence diagram of the antennal perception experiment
圖10
觸角感知機制實驗流程時序圖
Figure10.
Sequence diagram of the antennal perception experiment
2.2.2 電極刺入的位置
實驗中要使昆蟲觸角與溶液接觸時形成接觸信號回路,需要建立生物昆蟲與物理信號采集電路的通路。在此采用直徑為0.1 mm的銀(Ag)質電極搭建接觸電信號的回路[30],將電極一端刺入蜜蜂的一側復眼中,另一端與電流前置放大器SRS-SR570共地。由于存活蜜蜂的復眼可以滿足電流傳導,所以蜜蜂觸角在隨機自由擺動過程中,一旦接觸溶液,就會形成電路回路,可實現觸角接觸溶液時的電流信號采集。
2.2.3 低噪聲電流放大
根據蜜蜂觸角接觸溶液的信號特征,選用電流前置放大器SRS-SR570對電流信號進行低噪聲放大與調理。設置電流前置放大器SRS-SR570的主要參數,包括:設置?12 dB/倍頻程、10 Hz截止頻率的低通濾波器,以及設置靈敏度為50 nA/V的低噪聲增益模式。
2.2.4 觸角電信號采集
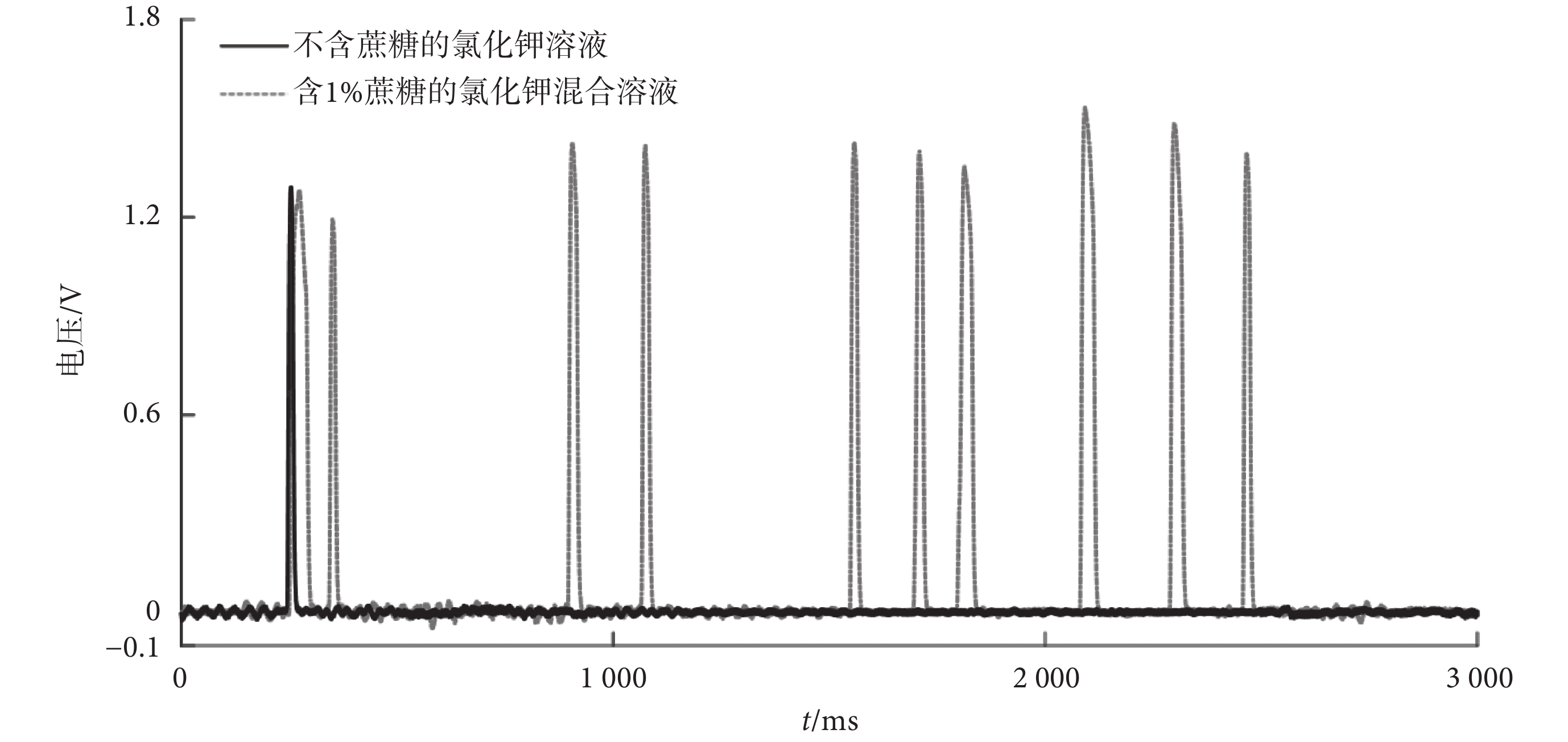
在如圖6所示的移液器槍頭中注入不含蔗糖的氯化鉀(濃度為:10 mmol/L)溶液或含1%蔗糖的氯化鉀(濃度為:10 mmol/L)混合溶液。當蜜蜂右側觸角接觸上述溶液時會形成電流回路,從而產生接觸電信號,利用軟件開發平臺NI LabVIEW 2016采集相應的觸角接觸生物電信號。典型的接觸電信號如圖11所示。
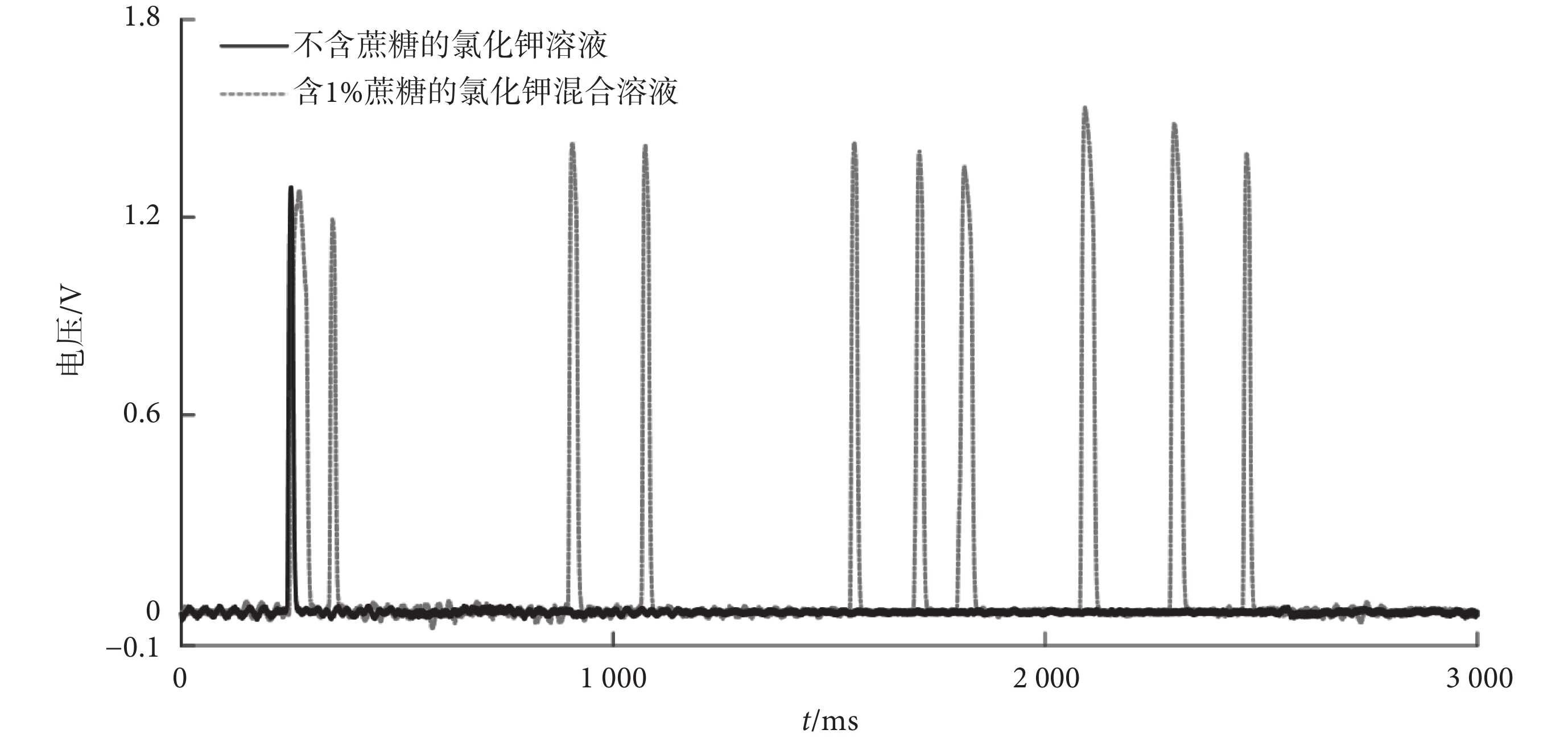 圖11
典型的接觸電信號
Figure11.
Typical contact electrical signals
圖11
典型的接觸電信號
Figure11.
Typical contact electrical signals
在移液器槍頭中注入含1%蔗糖的氯化鉀(濃度為:10 mmol/L)混合溶液,利用上述生物觸角電信號采集系統采集實驗數據。將采集得到的實驗結果與文獻[3]中蜜蜂觸角感知不同濃度(0%、0.1%、1%、10%、30%)蔗糖溶液的實驗結果相比較,可知:① 在蜜蜂觸角接觸蔗糖溶液的次數與蔗糖溶度相關性方面:與不含蔗糖的稀電解質溶液相比,蜜蜂觸角接觸含低濃度蔗糖的氯化鉀混合溶液的次數明顯增加;② 在蜜蜂觸角接觸蔗糖溶液的參數方面:蜜蜂觸角與含1%蔗糖的氯化鉀混合溶液接觸持續時間的中位數為20 ms左右,接觸時間間隔為200 ms左右,與文獻[3]的人工實驗結果表述的“平均時間為10~20 ms、接觸含蔗糖溶液的間隔時間小于200 ms”的結論具有一致性。因此,該自動化檢測與信號采集系統可以用于蜜蜂觸角感知機制實驗。
2.3 蜜蜂觸角的蔗糖感知機制
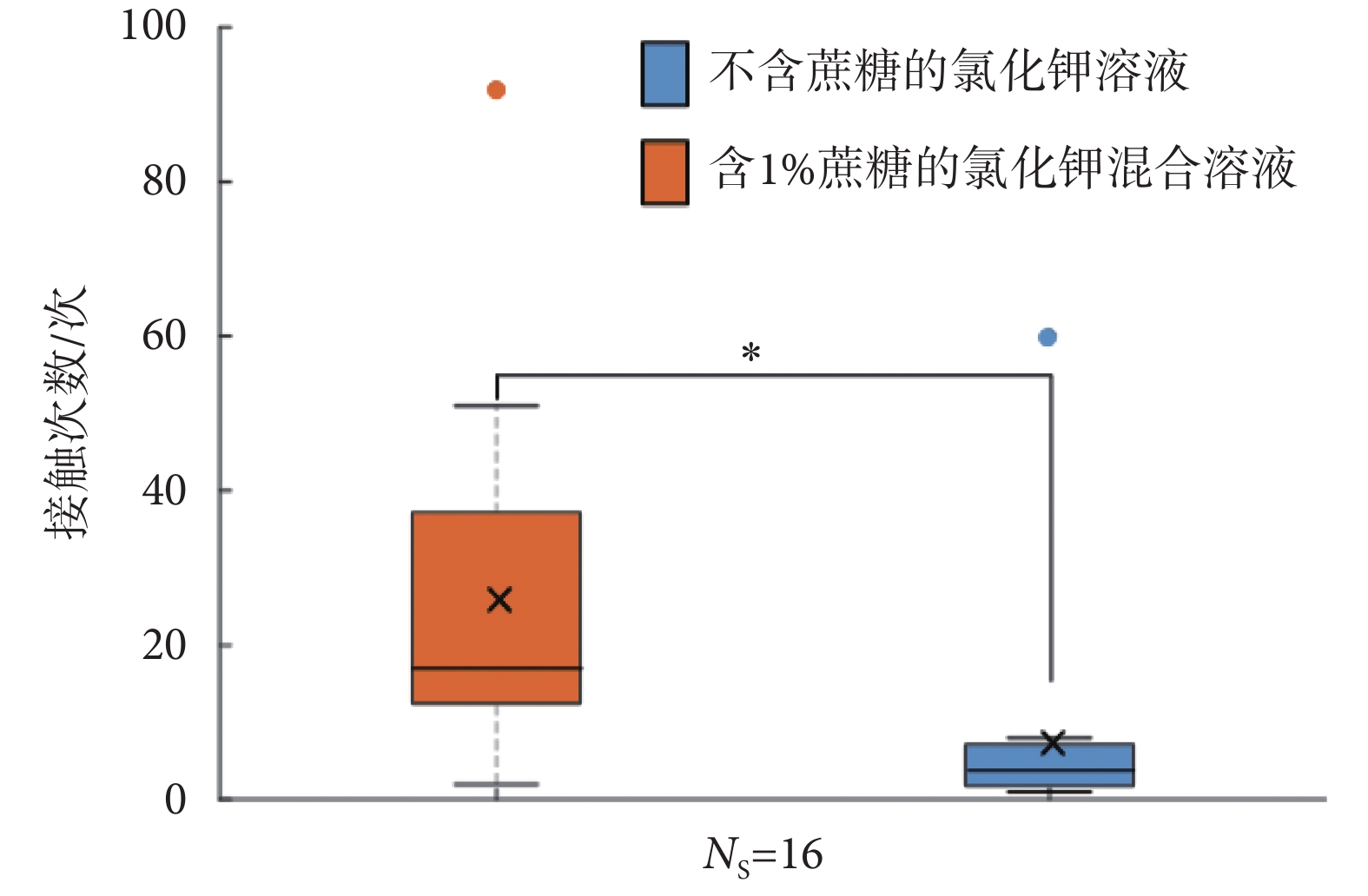
根據如圖10所示的觸角感知采集時序圖,設計蜜蜂觸角的蔗糖感知機制實驗。實驗中設置兩移液槍槍頭及相應的信號采集模塊,并使兩移液槍頭間距約為1 mm,實驗試劑仍采用不含蔗糖的氯化鉀(濃度為:10 mmol/L)溶液和含1%蔗糖的氯化鉀(濃度為:10 mmol/L)混合溶液。設定蜜蜂觸角感知信號分析篩選標準:① 剔除在2 min內無接觸電信號的實驗數據;② 剔除觸角只接觸單側溶液產生電信號的實驗數據。經過篩選后得到NS(NS = 16)只蜜蜂的觸角感知實驗數據,采用威爾科克森(Wilconxon)檢驗法對蜜蜂觸角接觸兩種溶液的次數進行統計,分析蜜蜂觸角在接觸不同溶液時差異的統計學意義,結果如圖12所示。實驗結果表明,蜜蜂觸角接觸含1%蔗糖的氯化鉀混合溶液的次數高于接觸不含蔗糖的低濃度氯化鉀溶液的次數(P < 0.01),經檢驗,差異具有統計學意義。
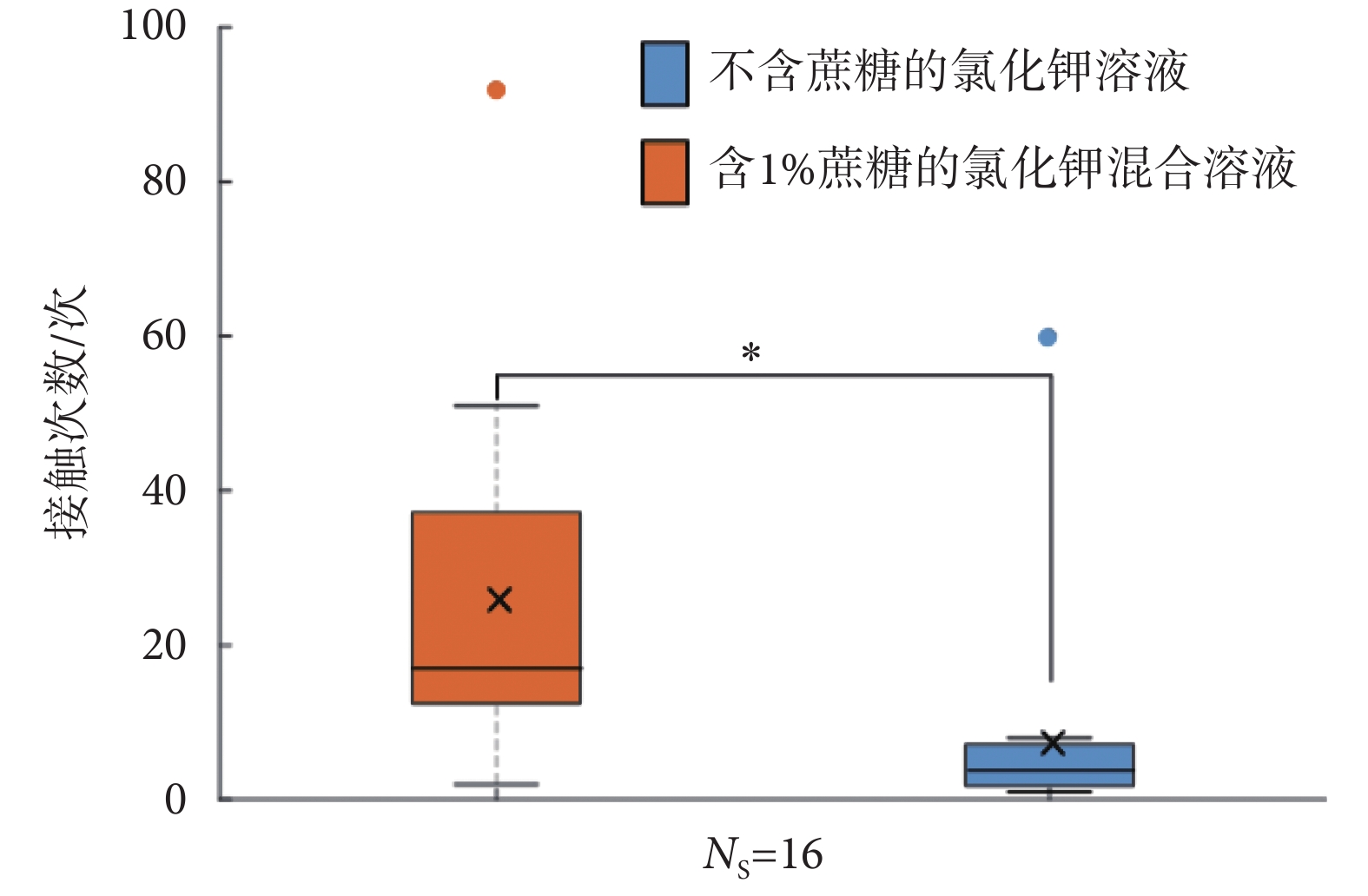 圖12
蜜蜂觸角接觸含不同蔗糖濃度的氯化鉀溶液的次數 *P < 0.01
Figure12.
The number of times that honeybee antennae contact potassium chloride solution with different sucrose concentrations
圖12
蜜蜂觸角接觸含不同蔗糖濃度的氯化鉀溶液的次數 *P < 0.01
Figure12.
The number of times that honeybee antennae contact potassium chloride solution with different sucrose concentrations
*
3 討論與結論
本文提出了一種基于模板匹配的生物觸角電信號采集系統,以解決在生物觸角感知機制實驗中實驗過程非標準化、手動操作干擾與效率低等問題。該系統以蜜蜂為實驗對象,通過建立基于蜜蜂頭部特征的匹配模板,可實現實驗過程中蜜蜂頭部的快速定位與頭部角度的位置調整,能夠有效避免在采集生物觸角接觸信號過程中的人為干擾,從而滿足實驗一致性需求。本文所設計電信號采集系統對于實驗蜜蜂的模板匹配精度可達95.3%,實驗蜜蜂的中軸線位置調整偏差小于1°,利用該系統能夠有效開展蜜蜂觸角的蔗糖感知機制實驗。實驗結果表明,經該系統得到的實驗結果與參考的人工實驗結果一致,驗證了該系統的可行性,為研究與分析生物觸角感知機制中所涉及的生物觸角接觸持續時間、接觸頻次等接觸參數提供了一種標準化的實驗方法與裝置。
重要聲明
利益沖突聲明:本文全體作者均聲明不存在利益沖突。
作者貢獻聲明:王佳佳主要負責實驗平臺搭建、生物實驗及論文撰寫;邢強提出系統的原創主旨,并指導設備搭建、實驗指導及論文審閱修訂;姬科舉負責提供實驗與數據分析指導;王文波負責論文審閱修訂;朱龍彪負責論文審閱修訂。
引言
觸角具有高精度和高靈敏度的感知特性,常被生物用于覓食、捕食和配偶識別等活動。研究生物觸角的感知機制有助于了解生物的生存繁衍,通過分析觸角的反應時間、接觸行為等特性,可為提高人工傳感器的精度和靈敏度提供解決方案[1-2]。
在生物觸角的感知行為及味覺特性研究中,Haupt[3-4]分析了蔗糖刺激下蜜蜂的喙伸反應(proboscis extension reflex,PER)和觸角的行為,發現蜜蜂觸角對不同濃度蔗糖溶液的接觸行為存在差異。Guiraud等[5]研究了蜜蜂觸角的味覺特性,發現蜜蜂觸角的味覺功能有限并且無法區分苦味物質和水。Zhao等[6]設計了四通道迷宮裝置,從生理學的角度分析出蜜蜂觸角對不同揮發物的敏感程度。上述研究表明,生物的觸角不僅能辨別各種氣味[7],而且能夠感受到溫度、光和振動的變化[8],研究生物觸角的感知機制能夠推動仿生高端傳感器的發展。例如:唐軍等[9]根據飛蛾觸角導航的原理,設計出一種基于飛蛾觸角模型的仿生導航傳感器;Zhu等[10]通過分析觸須的傳感機制,設計了檢測水流量的觸摸傳感器;謝清華等[11]和李明義等[12]利用類似昆蟲觸角的傳感器,使機器人具有觸覺感知避障功能。但是目前在觸角感知行為的研究中通常采用人工實驗方式,導致實驗工作量大,檢測結果易受到人為因素的影響,因此開發抗干擾的自動化實驗平臺對提高觸角感知機制實驗的標準化水平和效率有重要意義。
基于非接觸式數字圖像采集處理技術的生物監測儀器被廣泛用于測量和分析生物的行為[13-15]。例如:Shokaku等[16]開發了自動轉盤型迷宮裝置,利用圖像記錄的方式研究球潮蟲(pill bug)的轉彎行為;Liao等[17]開發了高速攝像機采集系統,記錄蜜蜂在攝食干糖時舌頭的行為,從而研究其攝食機制;Chole等[18]開發了一個基于高頻運動捕捉原理的蜜蜂觸角運動跟蹤系統,記錄觸角對不同氣體的反應。上述研究表明,利用圖像處理技術的生物行為研究裝置,能夠有效解決人工實驗存在的主觀定性的問題,從而達到精確、靈活地檢測和分析生物行為的目的。
利用機器視覺反饋信息調整觸角與試劑的相對位置,是保證觸角感知機制實驗過程一致性的可靠方式。本文將設計一種基于模板匹配的生物觸角接觸電信號的采集系統,實現對實驗昆蟲頭部區域的快速定位。同時展開關于生物觸角對不同濃度蔗糖溶液的感知機制的研究,驗證該系統在采集生物觸角接觸參數(如接觸的持續時間、時間間隔及接觸頻次)等信息時的有效性,為研究與分析生物觸角感知機制中所涉及的生物觸角接觸參數提供一種實驗方法和裝置。
1 系統總體設計
1.1 系統的硬件組成
生物觸角電信號采集系統主要由五個部分組成:攝像模塊、圖像處理模塊、位置調整模塊、主控單元和數據采集模塊,如圖1所示。攝像模塊由相機和同軸紅外光源組成,用于圖像信息的采集;圖像處理模塊主要利用基于計算機的數字圖像處理技術,實現昆蟲頭部特征信息的預處理、匹配及昆蟲頭部的位置檢測;位置調整模塊主要由自動平移臺、旋轉臺和電機組成,根據圖像處理模塊反饋的位置參數實現昆蟲觸角的位置調整;主控單元為嵌入式微控制器,實現各模塊信號接收、決策及電機控制;數據采集模塊由電流前置放大器、數模轉換器及上位機數據采集軟件等組成,負責采集、分析昆蟲觸角與溶液接觸時的信號。系統的組成示意如圖2所示。
圖1
系統結構
Figure1.
System structure
圖2
系統的組成
Figure2.
System composition
1.2 圖像處理模塊
圖像處理模塊利用數字圖像處理算法確定生物特征區域,從而為執行機構提供相關位置參數,包括:目標圖像的預處理、特征圖像模板的建立與匹配以及基于最小外接矩形的特征位置檢測等功能。
1.2.1 目標圖像的預處理
在具有紅外光源的封閉暗室中采集含有蜜蜂頭部的目標圖像。首先利用自適應閾值法處理圖像I源圖的前后景信息并進行二值化。然后采用魯棒性較強的中值濾波法對二值圖像進行去噪處理,去除由光照不均、蜜蜂頭部毛發等產生的噪聲干擾。最后對經上述圖像處理后的同一位置的兩張二值圖像進行像素間的邏輯與運算、開運算等操作,從而得到蜜蜂頭部感興趣區域的特征圖像。
在建立昆蟲頭部特征模板和昆蟲活體檢測的過程中,均需對無觸角的昆蟲頭部圖像I'源圖 和活體昆蟲的待測圖像I源圖 進行圖像預處理,并分別獲得建立模板的特征圖像I模板 或者用于檢測的待匹配特征圖像I待測。
1.2.2 特征圖像模板的建立與匹配
(1)特征圖像模板的建立。目標檢測的準確性與所建立的模板質量直接相關,而在實驗過程中即使是選用同種昆蟲,其頭部也會存在大小、形狀等差異,但是由于蜜蜂頭部的總體特征相似,因此仍然可以建立相應的特征圖像模板。
搭建具有明顯的前景(蜜蜂頭部灰黑色)和后景(實驗平臺白色)間的顏色關系的實驗平臺,并利用商業圖像處理軟件VisionMaster 4.0.0(杭州海康機器人技術有限公司 Inc.,中國)的模板匹配功能模塊建立蜜蜂頭部特征的模板庫,具體步驟如下:① 對目標圖像進行預處理,提取蜜蜂頭部的感興趣區域;② 人工配置特征圖像I模板 的模板參數——如設置初搜模板目標的速度尺度、尺度模式以及對比度閾值等參數,確定特征尺度并修正初搜結果的位置;③ 提取特征圖像I模板 的邊緣特征,建立特征圖像模板;④ 為了提高模板匹配的準確性,隨機選擇同一蜂巢內的數只蜜蜂(經篩選后的蜜蜂存在大小差異),剪掉其觸角,重復上述步驟,建立生物頭部的二值圖像集{I模板}。
(2)特征圖像模板的匹配。選擇豪斯多夫(Hausdorff)算法進行基于邊緣特征的目標匹配[19],實現對采集圖像中特征區域位置的快速確定。算法過程如下:假設兩個有限點集分別為A = {a1, a2, , ap},B = {b1, b2, , bq},則定義A和B之間的Hausdorff距離如式(1)所示:
|
式中,H(A, B)為點集A和B的Hausdorff距離;h(A, B)為A到B的有向Hausdorff距離,如式(2)所示;h(B, A)為B到A的有向Hausdorff距離,如式(3)所示:
|
|
式中,ai和bj分別為有限點集A、B中的點,其中i = 1, 2, , p且j = 1, 2, , q;表示點集A和B間的距離范數。
通過計算模板圖像I模板 的輪廓與待匹配圖像I待測 的輪廓之間的Hausdorff距離,判斷兩者的相似性,實現昆蟲頭部特征的自動匹配以及感興趣區域的定位、分割。
1.2.3 基于最小外接矩形的特征位置檢測
根據蜜蜂頭部的左右對稱性、口器部分處于長軸方向等形態特征,可采用蜜蜂頭部長軸方向表示蜜蜂頭部中軸線方向。但是由于蜜蜂頭部輪廓存在凹陷,所以在檢測頭部朝向時,采用格雷厄姆(Graham)掃描算法構造昆蟲頭部凸包,并結合遍歷輪廓凸包邊的方式構造最小外接矩形[20-21],從而根據蜜蜂頭部輪廓最小外接矩形的矩形長軸方向,快速、準確地得到蜜蜂頭部輪廓中軸線方向,以及計算其與圖2中標記尺的位置偏差。圖像處理具體步驟如下:① 基于上述模板匹配法,從圖像I待測中提取目標頭部的特征二值圖像I,確定其形心I(x, y),并構造二值圖像I的輪廓凸包;② 過形心的直線與輪廓凸包相交得到兩個交點,當兩點的距離最長時,確定該直線為蜜蜂頭部的中軸線;③ 將該線段作為最小外接矩形的長軸,將垂直于該長軸且與輪廓交點距離最長的線段作為短軸,構造最小外接矩形T;④ 以形心為坐標原點建立直角坐標系,計算矩形T的長軸與所建立的坐標軸系X軸的夾角。具體流程如圖3所示。
圖3
圖像處理流程圖
Figure3.
Image processing flow
1.3 位置調整模塊
位置調整模塊主要是根據圖像處理模塊反饋的昆蟲頭部位置參數,實現對昆蟲觸角位置的調整,從而保證不同批次的實驗對象(蜜蜂)在觸角感知特性實驗過程中所處位置具有一致性,即保持昆蟲頭部與測試試劑之間的幾何位置關系一致。具體過程包括:① 利用自動平移臺ZST4001G(中天光正科技有限公司 Inc.,中國)帶動自動旋轉臺ZRC36010WD(中天光正科技有限公司 Inc.,中國)對待測對象在水平方向以及角度方面進行調整,其位置調整結果由光柵傳感器JCXE-DK(貴陽新天光電科技有限公司 Inc.,中國)進行反饋,從而使得裝載有實驗昆蟲(蜜蜂)的工位移動到檢測區域內;② 根據圖像處理模塊反饋的位置參數,利用單片機STM32(意法半導體有限公司 Inc.,瑞士)控制步進電機實現實驗昆蟲(蜜蜂)頭部中軸線與預設參考刻度線的對齊,從而滿足觸角感知機制實驗對蜜蜂位置與測試試劑間的幾何位置的要求;③ 利用數據采集模塊采集觸角接觸溶液時的接觸信號。整體流程如圖4所示。
圖4
系統檢測流程圖
Figure4.
Flowchart of the detection system
1.4 信號采集與分析模塊
高精度的數據采集系統可以獲得昆蟲觸角接觸溶液時的接觸參數(如接觸的持續時間、時間間隔及接觸頻次),能夠實現對蜜蜂觸角接觸蔗糖溶液時產生的接觸電信號的采集[3]。主要包括:① 搭建昆蟲觸角接觸溶液的檢測電路。由于本文實驗對象(蜜蜂)的電阻值要小于人體電阻值(一般為1~3 kΩ)[22],為降低觸角接觸時的放電現象對昆蟲觸角接觸溶液行為的影響,利用電流前置放大器SRS-SR570(Standford Research Systems Inc.,美國)提供皮安(pΑ)級別偏置電流,并在電路中串聯千歐姆(kΩ)級的電阻,以減少電流對昆蟲的影響[23-26];② 信號濾波與放大。昆蟲復眼被涂抹遮擋,其觸角通過自由擺動隨機接觸溶液,由于當昆蟲觸角與溶液接觸時會形成接觸信號回路且時間短促,因此選用電流前置放大器SRS-SR570進行觸角接觸試劑時接觸電信號的濾波和放大,并實現信號的傳輸;③ 信號的采集與處理。針對所放大的信號,利用軟件開發平臺NI LabVIEW 2016(National Instruments Inc.,美國)以及具備16位高分辨率的數據采集板NI PCI-6255(National Instruments Inc.,美國)進行電信號的采集與處理。信號采集的工作原理如圖5所示。
圖5
電信號采集示意圖
Figure5.
Electrical signal acquisition
為過濾電信號采集過程中存在的電極噪聲、電路噪聲以及觸角所引起的噪聲等[27],選擇軟件開發平臺NI LabVIEW 2016中的巴特沃斯(Butterworth)低通濾波器對電信號進行二次濾波,Butterworth低通濾波器原理如式(4)所示:
|
式中,H(u, v)為Butterworth低通濾波器的傳遞函數,D(u, v)為截止頻率,D0為通帶半徑,n為階數(本實驗中選擇截止頻率為20 Hz,n = 3)。
2 系統測試與實驗分析
為驗證上述裝置的可靠性與檢測精度,設計了蜜蜂觸角的蔗糖感知機制實驗,實驗裝置如圖6所示。實驗中選用工業相機(MV-CA060-10GM,杭州海康機器人技術有限公司 Inc.,中國)以及商業圖像處理軟件VisionMaster 4.0.0進行圖像采集與處理,而昆蟲頭部的位置通過微型電機進行調整,整個裝置安裝暗室環境中。實驗蜜蜂為南通大學農業部南方平原玉米科學觀測站長期保種的東方蜜蜂中華亞種中的工蜂,體長約10~13 mm,飼養于室外標準的活框蜂箱中。
圖6
生物觸角電信號采集系統
Figure6.
Antennal electric signal acquisition system
2.1 實驗系統的圖像定位效果和精度評價
2.1.1 模板匹配的精度分析
如圖7所示建立蜜蜂頭部的特征模板I模板,利用采集的150張活體蜜蜂的待檢測圖像{I源圖}進行模板匹配實驗,從而比較分析模板匹配算法的有效性。由于基于邊緣特征的模板匹配算法不易受光照等因素的影響,并且在提取蜜蜂的頭部特征前對圖像進行了預處理等操作,以提高圖像算法處理的魯棒性,從而減少誤匹配的概率。針對相同的采集圖像{I源圖},該方法與基于灰度的匹配算法相比較,在匹配準確率上有所提高,其結果如表1所示。其中,匹配準確率如式(5)所示:
圖7
檢測結果
Figure7.
Detection results
|
式中,MA為蜜蜂頭部三角區識別的準確率,MS為蜜蜂頭部三角區準確識別的圖片個數,M為蜜蜂頭部圖片總數。
2.1.2 圖像定位效果分析
蜜蜂頭部中軸線的提取過程如圖8所示。首先針對活體蜜蜂的待檢測圖像I源圖,采用模板匹配方法定位蜜蜂頭部區域,得到用于蜜蜂頭部中軸線定位的二值圖像I1、I2。然后對圖像I1、I2進行圖像預處理操作,提取蜜蜂頭部輪廓。其次基于最小外接矩形法得到該輪廓的最小外接矩形T。最后根據最小外接矩形的長軸位置得到待檢測圖像I源圖 中活體蜜蜂頭部的中軸線Lc,從而為位置調整模塊提供蜜蜂觸角的位置調整參數。
圖8
圖像處理效果圖
Figure8.
Effect of image processing
為檢測基于模板匹配的電信號采集系統的調整精度,設置如下實驗:① 建立如圖9所示的坐標系XwOYw,設置標記尺(Lref)位置,使得標記尺(Lref)的方向通過旋轉臺轉盤的中心,且與Yw軸在同一直線上,并規定以Xw軸正方向為起始,逆時針轉過的角度為正角,反之為負角;② 將裝有蜜蜂的固定裝置放置于旋轉臺轉盤上,利用最小外接矩形法提取蜜蜂頭部的中軸線(Lc),獲得其在坐標系中的角度α(0° ≤ α < 360°);③ 計算中軸線(Lc)與標記尺(Lref)間的夾角θ(θ = 90° ? α),將θ作為位置調整模塊的反饋調整參數;④ 根據角度反饋參數,位置調整模塊調整蜜蜂頭部中軸線朝向,并計算調整后的蜜蜂頭部中軸線(L'c)與標記尺(Lref)間的夾角ε(即位置調整偏差角);⑤ 重復上述 ①~④ 的實驗步驟,分別調整當蜜蜂中軸線(Lc)處于四個不同位置時的角度α,并計算調整后的角度偏差ε,示意如圖9所示。實驗結果表明:蜜蜂經過基于視覺檢測反饋的位置調整模塊調整后,其頭部中軸線與標記尺的最大位置調整偏差角為0.4°,在該角度偏差范圍內蜜蜂觸角能夠在自由擺動的情況下接觸實驗溶液,檢測結果如表2所示。
圖9
檢測位置示意圖
Figure9.
Detected locations
2.2 昆蟲觸角電信號采集的可靠性分析
2.2.1 蜜蜂的篩選
實驗當天上午,從蜂箱出口處捕捉N(N = 20)只歸巢的蜜蜂,將其放置在溫度4~7 ℃的冰箱內,直至蜜蜂進入休眠狀態后取出,并用黑色涂料對蜜蜂的復眼進行覆蓋涂抹。
將蜜蜂固定于具有編號的固定裝置中,分別采用不同濃度的蔗糖(分別為0%、0.1%、1%、10%、30%)和氯化鉀(濃度為:10 mmol/L)的混合溶液對蜜蜂進行PER測試。PER測試主要包括:① 剔除對含30%蔗糖的氯化鉀混合溶液無PER反應的蜜蜂;② 剔除對不含蔗糖的氯化鉀溶液有PER反應的蜜蜂。選用30%濃度的蔗糖溶液喂食通過PER測試的其余蜜蜂[28],然后將蜜蜂置于濕度為70%的箱子內,靜止30 min后進行實驗。鑒于蜜蜂觸角的偏側性[29],在此選擇蜜蜂的右側觸角進行實驗,經過實驗測試及篩選,獲得NS(NS < N)只符合條件的蜜蜂。實驗流程及時序圖如圖10所示。
圖10
觸角感知機制實驗流程時序圖
Figure10.
Sequence diagram of the antennal perception experiment
2.2.2 電極刺入的位置
實驗中要使昆蟲觸角與溶液接觸時形成接觸信號回路,需要建立生物昆蟲與物理信號采集電路的通路。在此采用直徑為0.1 mm的銀(Ag)質電極搭建接觸電信號的回路[30],將電極一端刺入蜜蜂的一側復眼中,另一端與電流前置放大器SRS-SR570共地。由于存活蜜蜂的復眼可以滿足電流傳導,所以蜜蜂觸角在隨機自由擺動過程中,一旦接觸溶液,就會形成電路回路,可實現觸角接觸溶液時的電流信號采集。
2.2.3 低噪聲電流放大
根據蜜蜂觸角接觸溶液的信號特征,選用電流前置放大器SRS-SR570對電流信號進行低噪聲放大與調理。設置電流前置放大器SRS-SR570的主要參數,包括:設置?12 dB/倍頻程、10 Hz截止頻率的低通濾波器,以及設置靈敏度為50 nA/V的低噪聲增益模式。
2.2.4 觸角電信號采集
在如圖6所示的移液器槍頭中注入不含蔗糖的氯化鉀(濃度為:10 mmol/L)溶液或含1%蔗糖的氯化鉀(濃度為:10 mmol/L)混合溶液。當蜜蜂右側觸角接觸上述溶液時會形成電流回路,從而產生接觸電信號,利用軟件開發平臺NI LabVIEW 2016采集相應的觸角接觸生物電信號。典型的接觸電信號如圖11所示。
圖11
典型的接觸電信號
Figure11.
Typical contact electrical signals
在移液器槍頭中注入含1%蔗糖的氯化鉀(濃度為:10 mmol/L)混合溶液,利用上述生物觸角電信號采集系統采集實驗數據。將采集得到的實驗結果與文獻[3]中蜜蜂觸角感知不同濃度(0%、0.1%、1%、10%、30%)蔗糖溶液的實驗結果相比較,可知:① 在蜜蜂觸角接觸蔗糖溶液的次數與蔗糖溶度相關性方面:與不含蔗糖的稀電解質溶液相比,蜜蜂觸角接觸含低濃度蔗糖的氯化鉀混合溶液的次數明顯增加;② 在蜜蜂觸角接觸蔗糖溶液的參數方面:蜜蜂觸角與含1%蔗糖的氯化鉀混合溶液接觸持續時間的中位數為20 ms左右,接觸時間間隔為200 ms左右,與文獻[3]的人工實驗結果表述的“平均時間為10~20 ms、接觸含蔗糖溶液的間隔時間小于200 ms”的結論具有一致性。因此,該自動化檢測與信號采集系統可以用于蜜蜂觸角感知機制實驗。
2.3 蜜蜂觸角的蔗糖感知機制
根據如圖10所示的觸角感知采集時序圖,設計蜜蜂觸角的蔗糖感知機制實驗。實驗中設置兩移液槍槍頭及相應的信號采集模塊,并使兩移液槍頭間距約為1 mm,實驗試劑仍采用不含蔗糖的氯化鉀(濃度為:10 mmol/L)溶液和含1%蔗糖的氯化鉀(濃度為:10 mmol/L)混合溶液。設定蜜蜂觸角感知信號分析篩選標準:① 剔除在2 min內無接觸電信號的實驗數據;② 剔除觸角只接觸單側溶液產生電信號的實驗數據。經過篩選后得到NS(NS = 16)只蜜蜂的觸角感知實驗數據,采用威爾科克森(Wilconxon)檢驗法對蜜蜂觸角接觸兩種溶液的次數進行統計,分析蜜蜂觸角在接觸不同溶液時差異的統計學意義,結果如圖12所示。實驗結果表明,蜜蜂觸角接觸含1%蔗糖的氯化鉀混合溶液的次數高于接觸不含蔗糖的低濃度氯化鉀溶液的次數(P < 0.01),經檢驗,差異具有統計學意義。
圖12
蜜蜂觸角接觸含不同蔗糖濃度的氯化鉀溶液的次數 *P < 0.01
Figure12.
The number of times that honeybee antennae contact potassium chloride solution with different sucrose concentrations
*
3 討論與結論
本文提出了一種基于模板匹配的生物觸角電信號采集系統,以解決在生物觸角感知機制實驗中實驗過程非標準化、手動操作干擾與效率低等問題。該系統以蜜蜂為實驗對象,通過建立基于蜜蜂頭部特征的匹配模板,可實現實驗過程中蜜蜂頭部的快速定位與頭部角度的位置調整,能夠有效避免在采集生物觸角接觸信號過程中的人為干擾,從而滿足實驗一致性需求。本文所設計電信號采集系統對于實驗蜜蜂的模板匹配精度可達95.3%,實驗蜜蜂的中軸線位置調整偏差小于1°,利用該系統能夠有效開展蜜蜂觸角的蔗糖感知機制實驗。實驗結果表明,經該系統得到的實驗結果與參考的人工實驗結果一致,驗證了該系統的可行性,為研究與分析生物觸角感知機制中所涉及的生物觸角接觸持續時間、接觸頻次等接觸參數提供了一種標準化的實驗方法與裝置。
重要聲明
利益沖突聲明:本文全體作者均聲明不存在利益沖突。
作者貢獻聲明:王佳佳主要負責實驗平臺搭建、生物實驗及論文撰寫;邢強提出系統的原創主旨,并指導設備搭建、實驗指導及論文審閱修訂;姬科舉負責提供實驗與數據分析指導;王文波負責論文審閱修訂;朱龍彪負責論文審閱修訂。