為解決傳統步態康復訓練設備體積大、動力響應慢、智能可控性差的問題,本文利用磁流變液剪切屈服強度隨施加的磁場強度變化而變化的特性,運用科學計算軟件,基于擴充的賓漢姆(Bingham)模型,對磁流變液阻尼器主要結構參數及其輸出的作用力進行仿真優化研究,并對尺寸確定后的阻尼器進行三維建模,在此基礎上根據阻尼器的設計使用要求,利用有限元分析軟件對主要受力部件進行受力分析、強度校核以及拓撲優化,最終設計了一款適用于可穿戴康復訓練系統的微型磁流變液阻尼器,對輕量化、便攜化、智能化的康復訓練設備的設計具有參考價值。
引用本文: 解世君, 易衛東, 楊墨欣, 陳永銳. 一種用于可穿戴康復訓練系統的微型磁流變液阻尼器的仿真與優化設計研究. 生物醫學工程學雜志, 2022, 39(6): 1133-1139. doi: 10.7507/1001-5515.202112068 復制
版權信息: ?四川大學華西醫院華西期刊社《生物醫學工程學雜志》版權所有,未經授權不得轉載、改編
引言
生物醫學工程領域,針對受損關節、腦卒中以及腦癱康復所用的步態康復訓練設備中傳統動力調整機構往往存在體積龐大、動力響應慢、智能可控性差等問題[1-2],本文引入了磁流變液阻尼器(magnetorheological fluid damper,MRFD)作為系統的作用力輸出裝置,以期實現系統性能的提升。這種阻尼器的主要優勢在于,在受控的磁場環境中,阻尼器產生的阻尼力具有輸出響應速度快且精度高的特點,將其應用于汽車懸掛系統、飛機起落架等機械結構的減震裝置時已展現出良好的應用前景[3-5];除此以外,還可應用于生物醫學工程領域,如手功能康復訓練系統、手術機器人的力反饋器[6-7],以及假肢膝關節的阻尼力輸出裝置[8]等對輸出響應速度有較高要求且需要對阻尼力實時動態調節的場景。
磁流變液阻尼器是一種以磁流變液(magnetorheological fluid,MRF)作為阻尼液的動態阻尼器。其可通過改變外加磁場強度繼而改變磁流變液的剪切屈服強度,且該變化響應迅速可靠,進一步可實現對設備輸出力的實時動態調節。另外,通過簡化磁流變液阻尼器的結構,可縮小阻尼器的幾何尺寸,從而實現設備整體的輕量化和結構的緊湊化,這對于穿戴式康復設備的便攜化與智能化至關重要,同時在一定程度上突破了傳統動力調整機構的局限性。
為了對應用于穿戴式康復設備的微型磁流變液阻尼器進行優化設計,有必要結合磁流變阻尼液的特性和實際需要,研究與之相適配的阻尼器機械結構及其相關參數。本文將基于擴充的賓漢姆(Bingham)模型對磁流變液所輸出的作用力進行仿真,以此對活塞結構參數進行優化,并利用有限元分析軟件對其主要零部件進行應力校核以及拓撲優化,最終給出一種用于穿戴式康復設備的微型磁流變液阻尼器的優化設計方法。
1 基本方法
為了得到設計合理并優化的磁流變液阻尼器,首先要對磁流變液特性進行研究,然后結合其特性,研究相應阻尼器的機械結構與磁流變液的合理優化配置,最終實現磁流變液阻尼器的優化設計。
1.1 結構設計
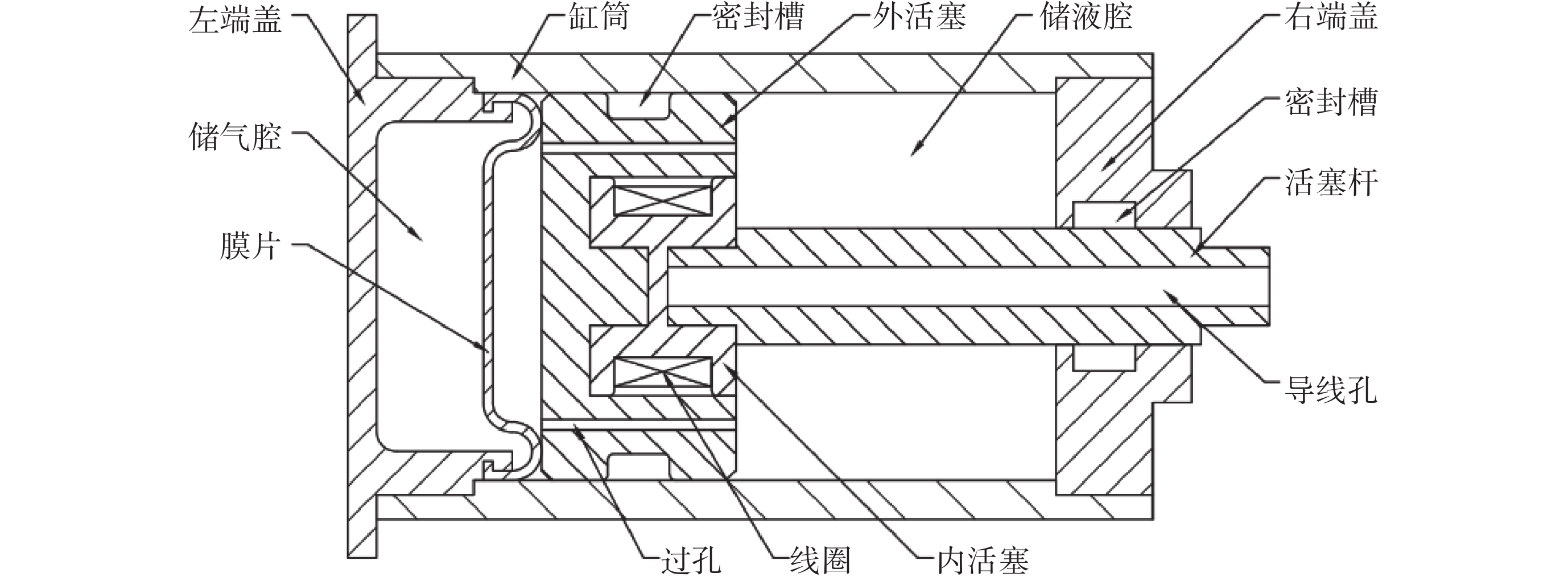
廣泛應用的傳統單桿式磁流變液阻尼器結構如圖1所示,主要由兩側端蓋、缸筒、內活塞、外活塞、活塞桿、線圈以及膜片等零部件組成。由于液體的不可壓縮特性,單桿式阻尼器的活塞做往復運動時,有桿腔與無桿腔之間存在體積差,導致無法運動,故需要有密封條件良好的儲氣腔儲存體積可壓縮的氣體,同時需要膜片或類似結構將儲氣腔與儲液腔隔絕開,才能夠滿足使用要求。線圈,通過接通電流產生外加于磁變流體的電磁場;活塞桿處,為中空設計,方便布置控制電磁線圈的導電線。阻尼器工作時,過孔周圍磁場強度受到纏繞于內活塞上的線圈電流控制,磁流變液的粘度與剪切屈服強度隨之變化,液體受迫流經位于外活塞上的過孔,對外輸出連續可調的阻尼力。外活塞與缸筒之間、活塞桿與端蓋之間都需要相應的密封設計。
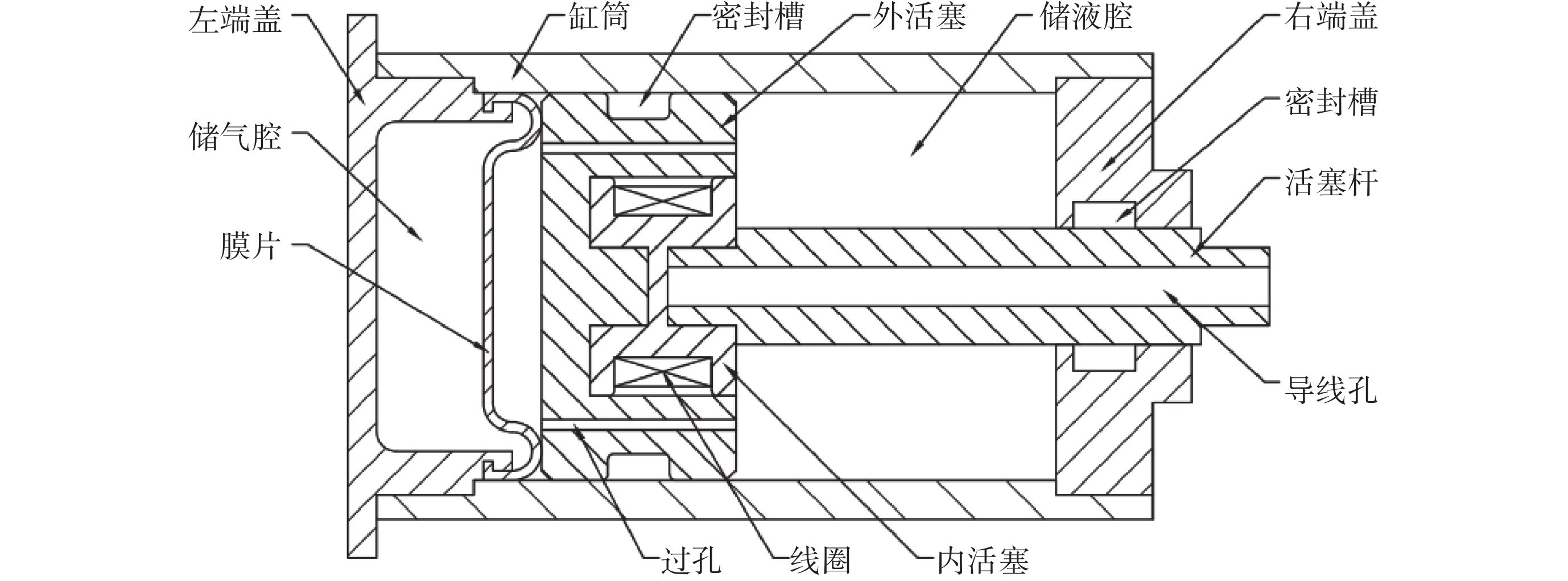 圖1
傳統磁流變液阻尼器結構示意圖
Figure1.
Schematic diagram of the structure of traditional magnetorheological fluid damper
圖1
傳統磁流變液阻尼器結構示意圖
Figure1.
Schematic diagram of the structure of traditional magnetorheological fluid damper
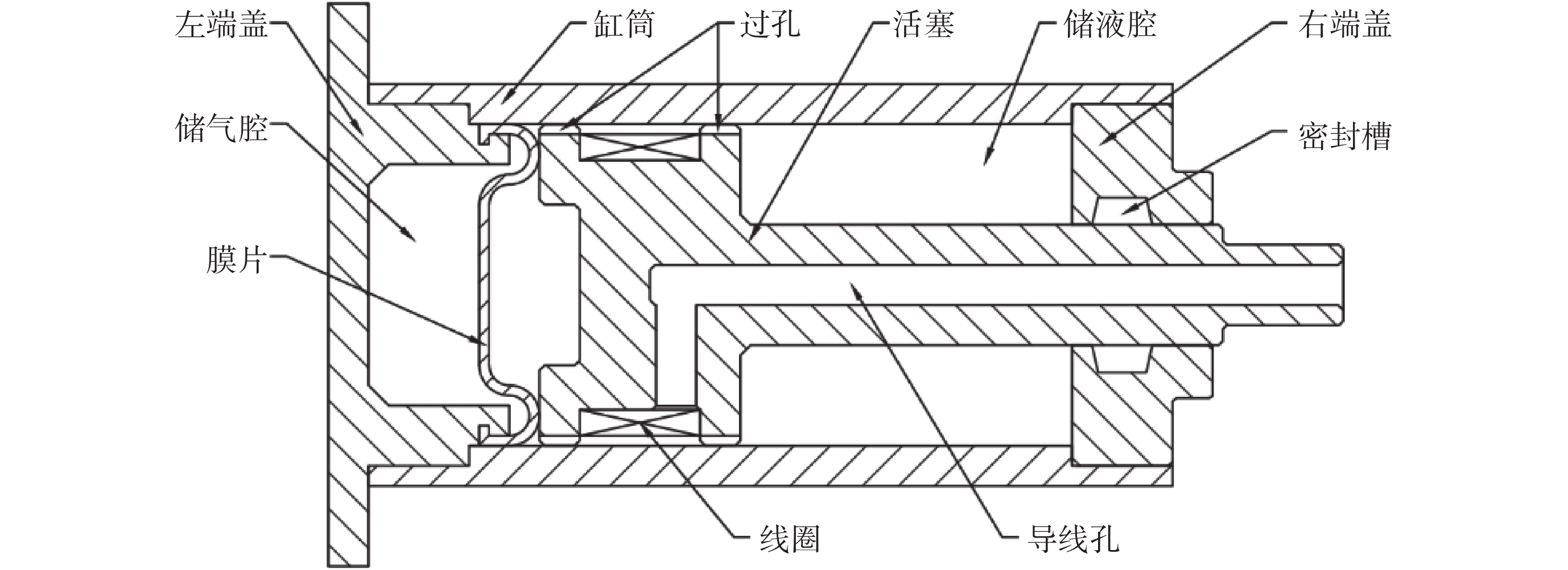
若按照傳統磁流變液阻尼器結構等比例縮小,制成微型磁流變液減震器,其內部的微小復雜結構難以加工,制造成本將大幅提高。考慮到在正常工作時,阻尼器內的磁流變液將在有桿腔與無桿腔間往復流動,故取消外活塞設計,減少原活塞處的密封裝置,并在內活塞外沿開槽,作為液體過孔。將活塞桿與活塞做一體化設計,以簡化零件結構,降低制作成本。活塞與活塞桿仍做中空設計,以布置磁場線圈導線。膜片與活塞桿與端蓋間的密封裝置予以保留。經簡化后的磁流變液阻尼器結構如圖2所示。
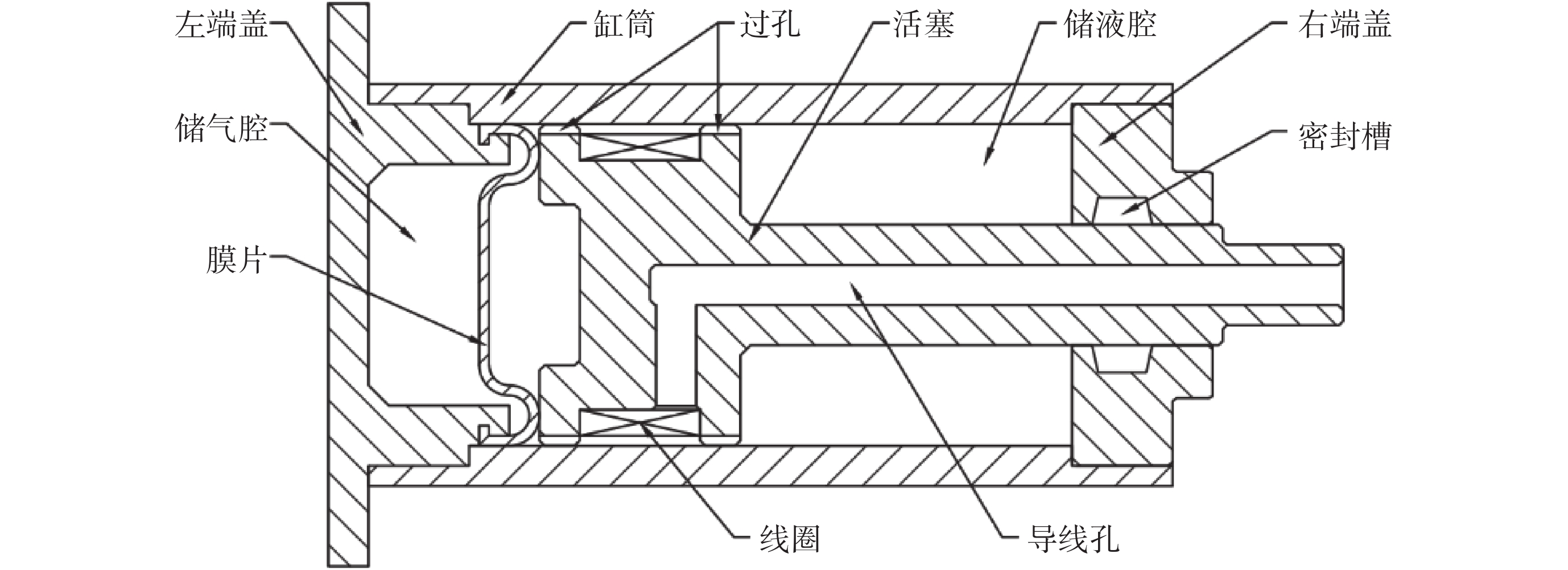 圖2
簡化設計的磁流變液阻尼器結構示意圖
Figure2.
Schematic diagram of simplified design of magnetorheological fluid damper
圖2
簡化設計的磁流變液阻尼器結構示意圖
Figure2.
Schematic diagram of simplified design of magnetorheological fluid damper
經簡化設計的微型磁流變液阻尼器不僅能夠實現傳統磁流變液阻尼器的功能,且結構簡單,便于加工,有利于實現各零部件主要尺寸的微型化。
1.2 仿真與分析
磁流變液阻尼器結構實現了微型化,但其主要性能參數,如阻尼力輸出特性等,是否能夠滿足應用的要求,可通過計算機仿真進行驗證。
1.2.1 磁流變體數學模型
磁流變液是磁流變液阻尼器中的關鍵材料,它的特性關系到阻尼器的動態響應行為,理論上,其特性可用不同類型的數學模型進行描述,如修正的布克-溫(Bouc-wen)模型等參數化模型[9-11],或神經網絡模型等非參數化模型[12]。考慮到本文所述設備的應用場景,以及對控制精度與響應速度的要求,且在設計初期需要得知阻尼器的最大輸出阻尼力,選擇擴充的賓漢姆模型[13]較為合適,其數學模型如式(1)所示:
 |
式中,Fd是阻尼器所產生的阻尼力;L是活塞有效長度;Ap是活塞的有效面積;h是孔道直徑;τy是磁流變液的屈服強度,與阻尼器線圈電流有關;sgn()為符號函數,指出括號內參數的正負號; 是阻尼器活塞與缸體間的相對速度;η是磁流變液的動力粘度系數;D是缸體內徑;f0為蓄能器引起的阻尼器出力偏差(可忽略)。其中,磁流變液的屈服強度τy計算公式如式(2)所示:
是阻尼器活塞與缸體間的相對速度;η是磁流變液的動力粘度系數;D是缸體內徑;f0為蓄能器引起的阻尼器出力偏差(可忽略)。其中,磁流變液的屈服強度τy計算公式如式(2)所示:
 |
式中, 、
、 ,均為與磁流變液性能相關的系數[14];I為電流大小;e為自然常數。
,均為與磁流變液性能相關的系數[14];I為電流大小;e為自然常數。
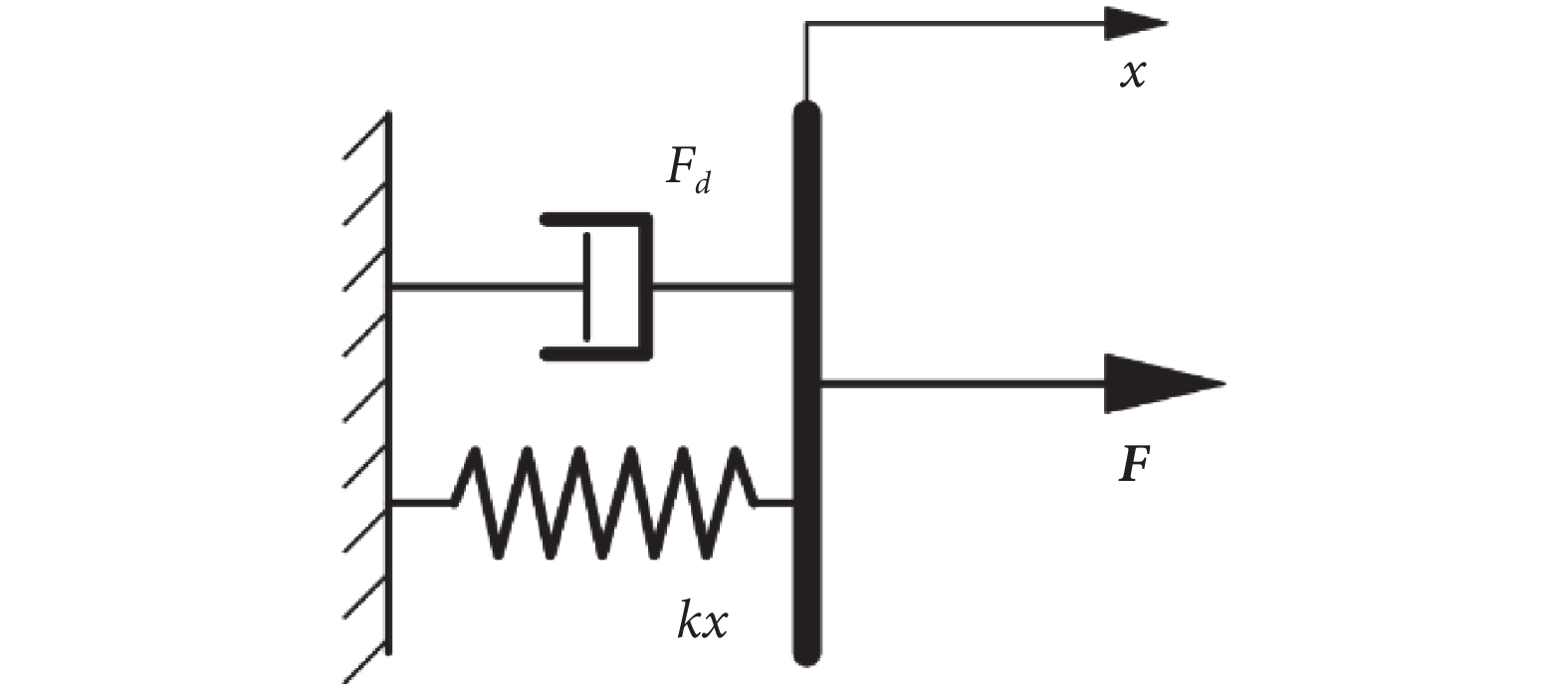
考慮在本磁流變液阻尼器上存在回復力作用,故在擴充的賓漢姆模型中增加一線性項以模擬彈簧所起的作用,彈簧彈力與阻尼器所提供的阻尼力共同作用,形成作用力F,得到改進的模型結構如圖3所示。
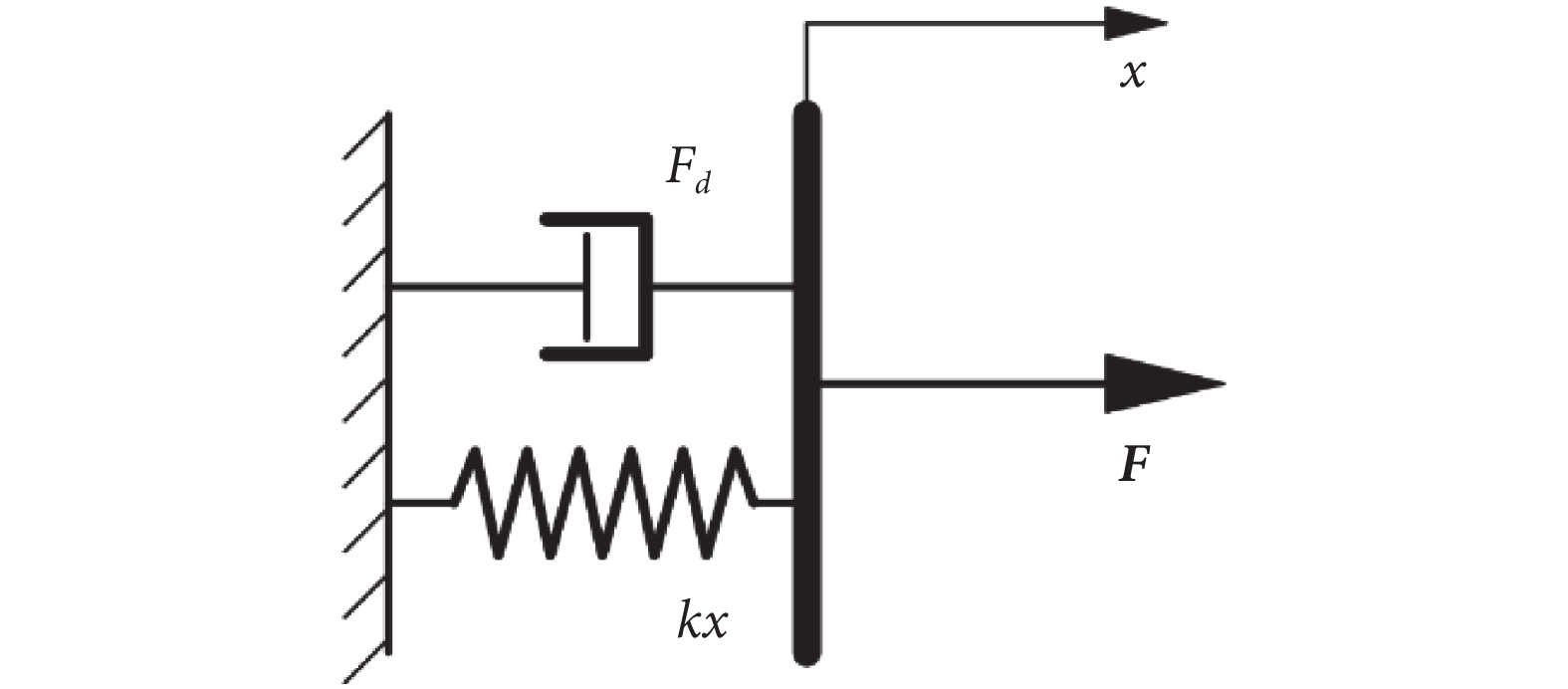 圖3
仿真模型結構圖
Figure3.
Diagram of simulation model structure
圖3
仿真模型結構圖
Figure3.
Diagram of simulation model structure
圖3中,忽略蓄能器所引起的阻尼器出力偏差,在并聯彈簧后,阻尼器所輸出的作用力F如式(3)所示:
 |
式中,k為彈簧的彈性系數,x為活塞與缸筒間的相對位移。
由式(3)可以看出,磁流變液阻尼器所輸出的作用力F可以分解為三項:其中第一項是與磁流變體剪切應力和速度方向有關的流體內摩擦力,可以通過改變阻尼器內充填的磁流變液的剪切屈服強度控制其大小,為可控阻尼力,記作F1,與過孔孔道直徑h成反比;第二項與速度呈線性關系,可以看作為粘滯力,為不可控阻尼力,記作F2,與孔道直徑h的三次方成反比;第三項為彈簧所提供的彈力,與彈簧的彈性系數和彈簧的形變量有關,記作F3。由此可見,在磁流體物理特性確定的條件下,過孔的孔道直徑h是影響輸出阻尼力的關健參數,是仿真時要特別研究的參數。
1.2.2 受力分析與拓撲優化
由于本文所研究的微型磁流變液阻尼器在實際工況中需要承受較大外力,在阻尼器各主要結構尺寸確定后,還需通過軟件對各零部件進行三維建模,借助計算機輔助工程分析軟件Workbench 2019 R2(ANSYS Inc., 美國)對阻尼器的主要受力部件進行受力分析,并對其強度、剛度進行校核。
若受力分析結果顯示其結構應力滿足使用要求,且材料安全裕度較大時,為了實現輕量化設計,應對所設計的零件進行結構拓撲優化,以減輕重量,同時節約材料,降低成本。
2 結果分析
2.1 孔道直徑優化
考慮到微型化的要求,本文所研究的微型磁流變液阻尼器各主要尺寸相對傳統磁流變液阻尼器均有大幅縮小,而缸徑、行程等受結構及使用要求限制保持不變。基于并聯彈簧改進后擴充的賓漢姆模型,如式(3)所示,阻尼器中流體過孔孔道直徑h將是對所輸出的阻尼力有顯著影響的重要參數,通過建立適當的模型和仿真,找出最佳參數值。
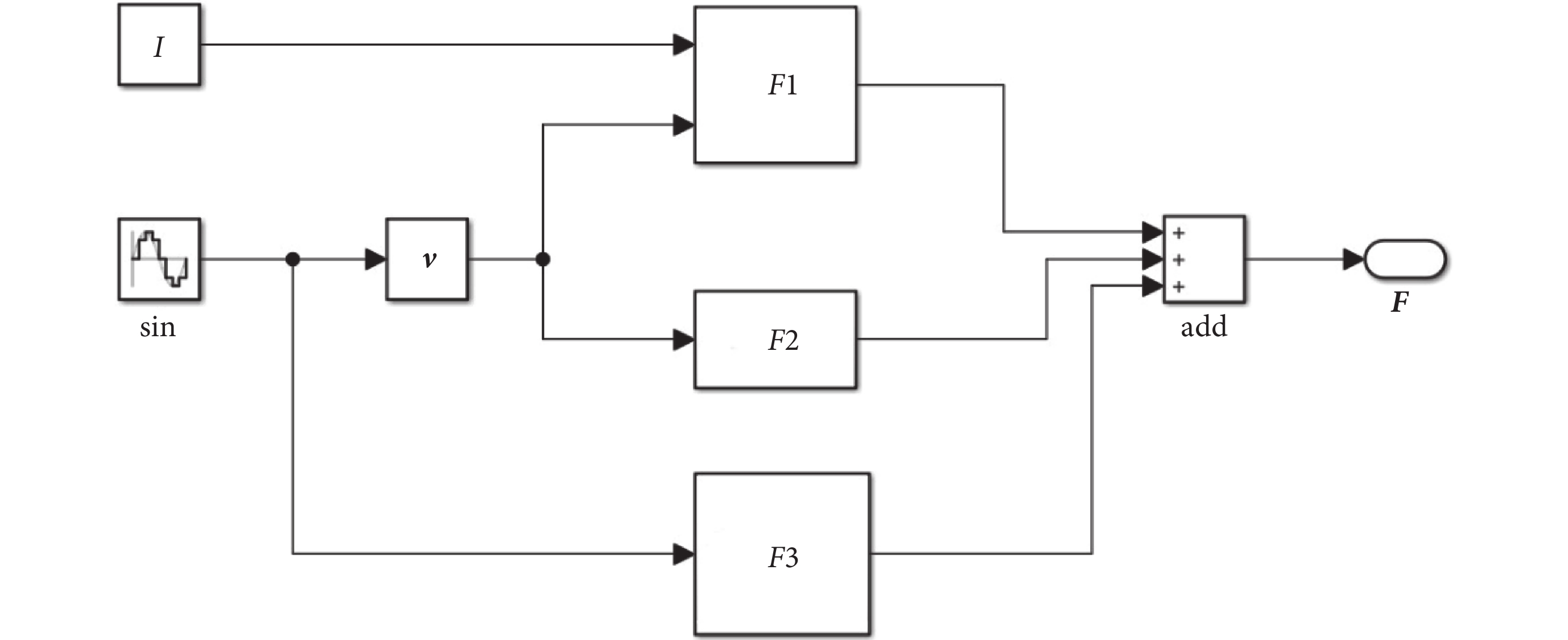
依據前文所述改進后擴充的賓漢姆模型,借助科學計算工程軟件MATLAB R2019b(MathWorks Inc., 美國)的可視化仿真工具Simulink,對模型進行模塊化建模和仿真。阻尼器所輸出阻尼力的模塊框圖如圖4所示。
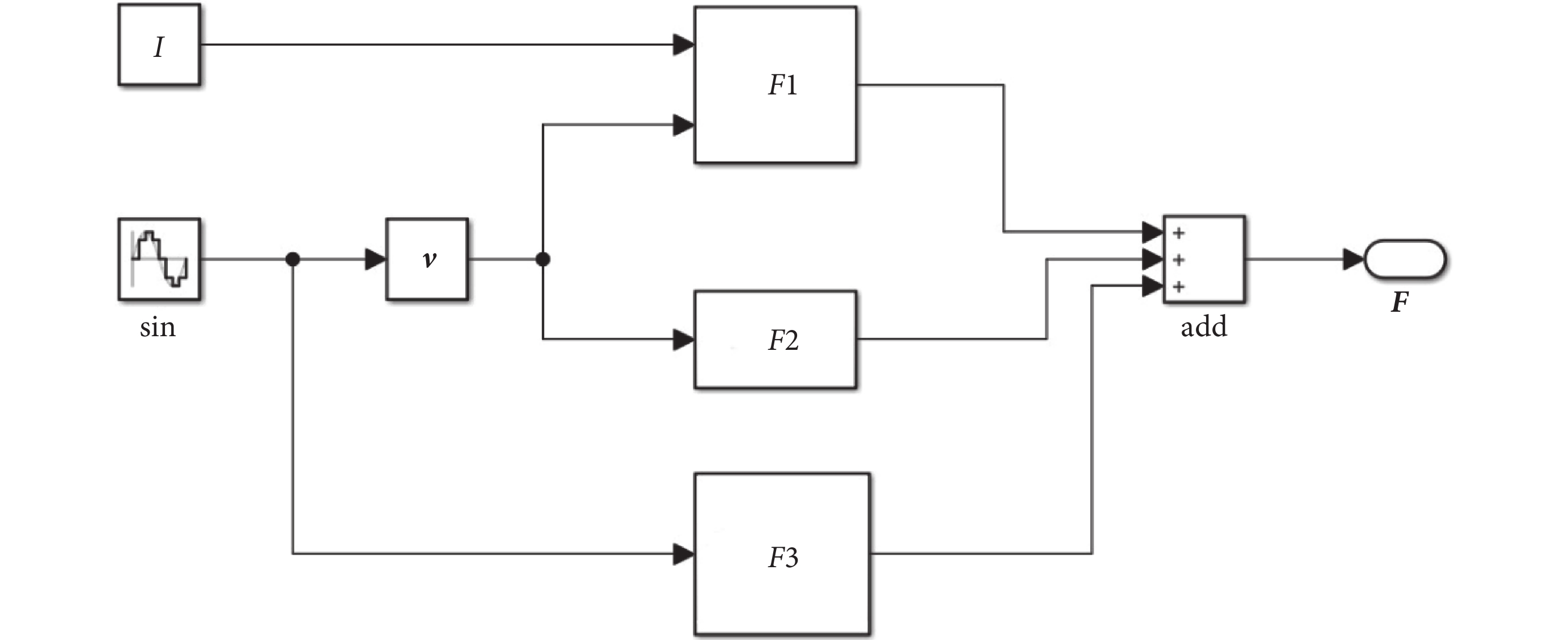 圖4
作用力仿真模塊框圖
Figure4.
Block diagram of the acting force of simulation module
圖4
作用力仿真模塊框圖
Figure4.
Block diagram of the acting force of simulation module
圖4中,I為線圈電流值,單位:A;sin為阻尼器外加正弦位移激勵,單位:mm;v代表對位移求導,得到阻尼器活塞相對缸筒的速度;F1、F2、F3分別代表前文所述摩擦力、粘滯力與彈簧彈力;add表示三項相加;F代表最終得到阻尼器作用力輸出值,單位: N。
基于本文所述微型磁流變液阻尼器,模型中彈簧彈性系數k取7 N/mm,動力粘度系數η取1 Pa?s,活塞的有效長度L為4 mm,缸體內徑D為16 mm,活塞的有效面積Ap為200 mm2。
阻尼器主要結構尺寸設定依據如下:① 為了使設備結構盡可能緊湊的同時,方便采購阻尼器內部其他標準化配件,降低設備整體制作成本,缸體內徑設為16 mm;② 考慮到實際加工難易程度,活塞有效長度設為4 mm;③ 由于本文所述阻尼器實際工況為下壓狀態,即活塞向膜片方向運動,故活塞有效面積為活塞無桿側橫截面積,大小為200 mm2;④ 受緊湊結構限制,所選彈簧彈性系數k為7 N/mm。
傳統磁流變液阻尼器孔道直徑h的最優取值為0.8~2.0 mm[15],相較于此,在本微型磁流變液阻尼器中,孔道直徑的上限設為1.0 mm,下限為0.1 mm。
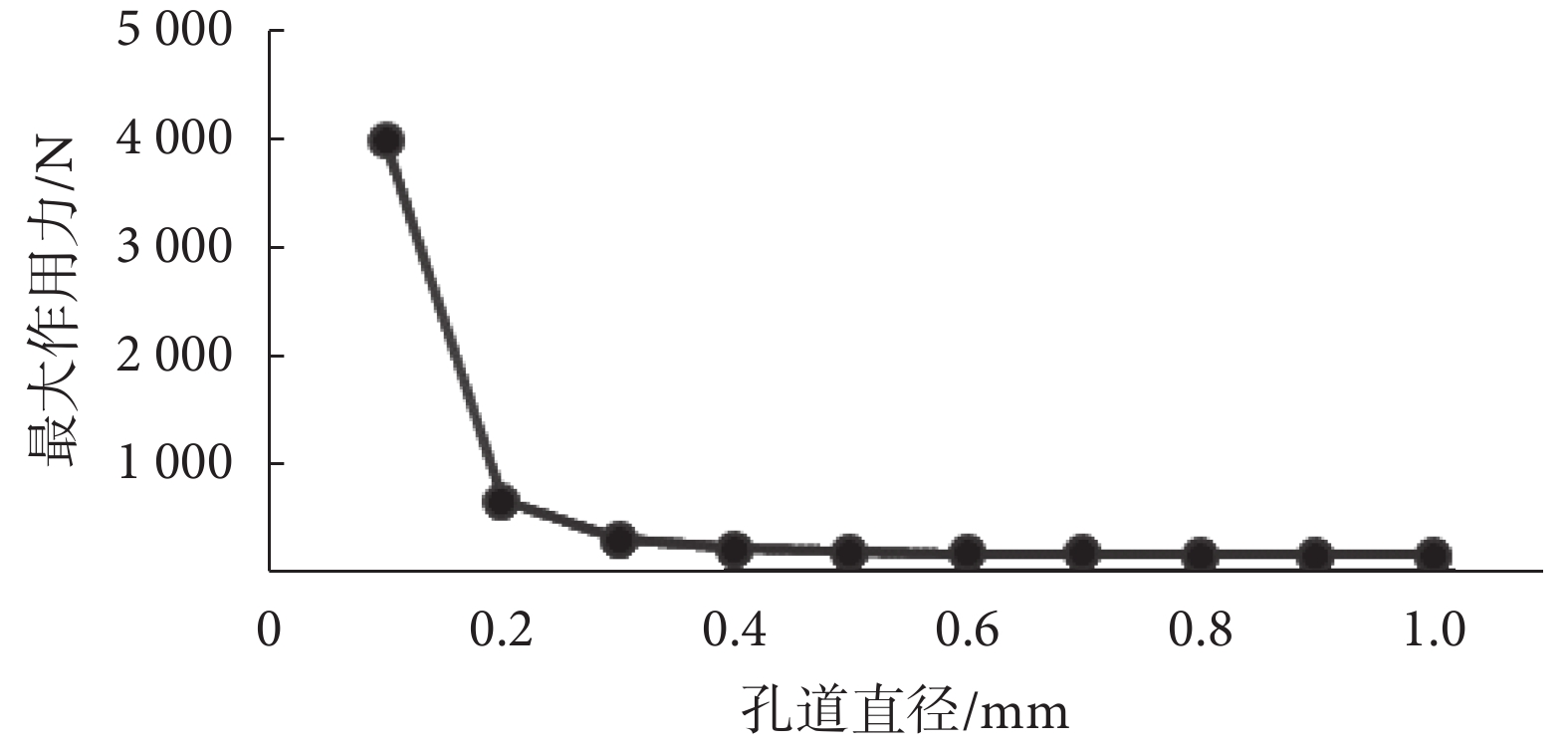
確定孔道直徑h取值范圍為0.1~1.0 mm,間隔為0.1 mm。阻尼器電磁線圈輸入電流為1 A,以便穿戴設備電源供電。參照常人的單足步態頻率[16],設置阻尼器外部施加的正弦位移激勵頻率為1 Hz,以模擬進行康復訓練患者的單足步態頻率;正弦位移激勵幅值為18 mm[6],以模擬阻尼器的最大行程。阻尼器最大作用力與孔道直徑的仿真結果如圖5所示。
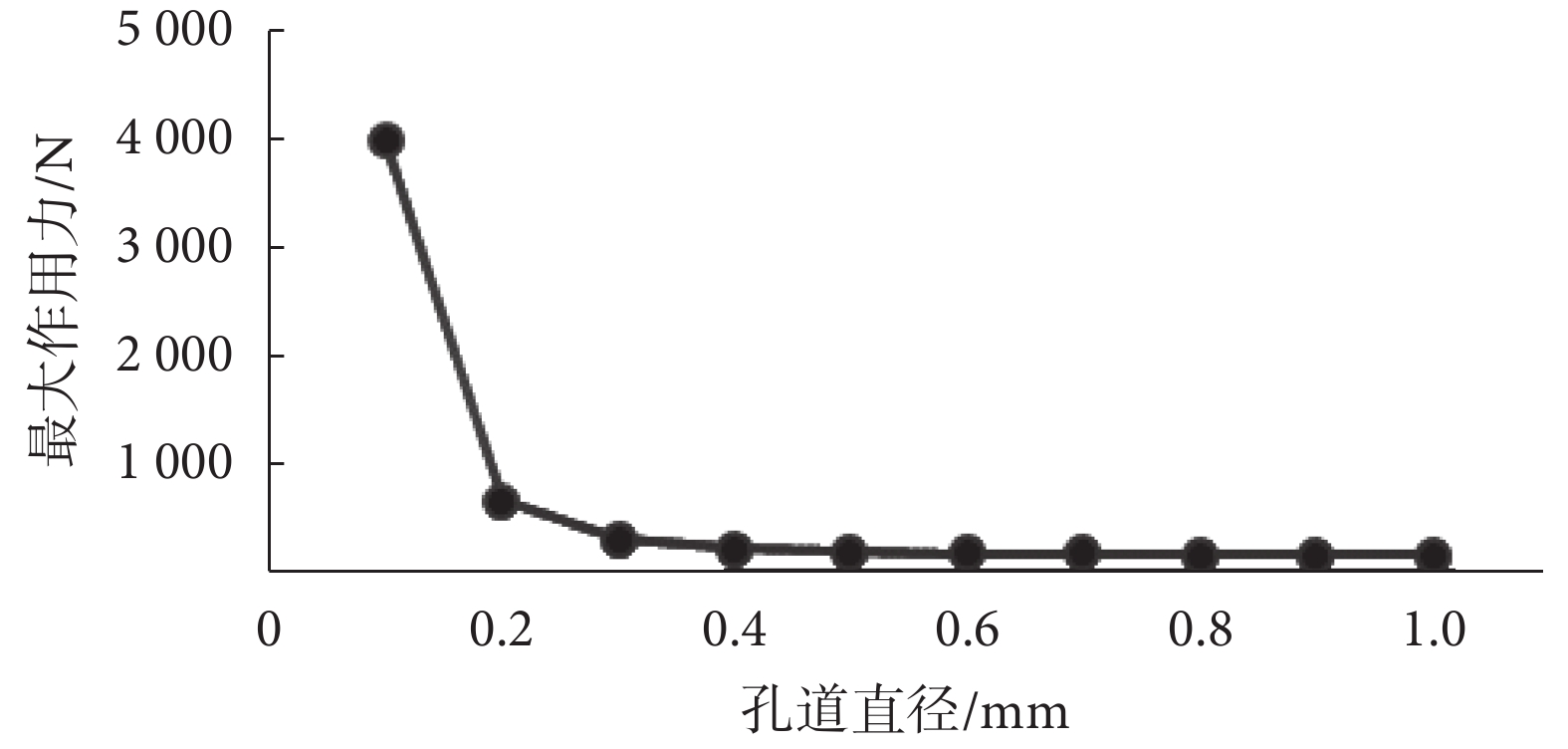 圖5
最大作用力與孔道直徑仿真結果
Figure5.
Simulation results of maximum acting force and hole diameter
圖5
最大作用力與孔道直徑仿真結果
Figure5.
Simulation results of maximum acting force and hole diameter
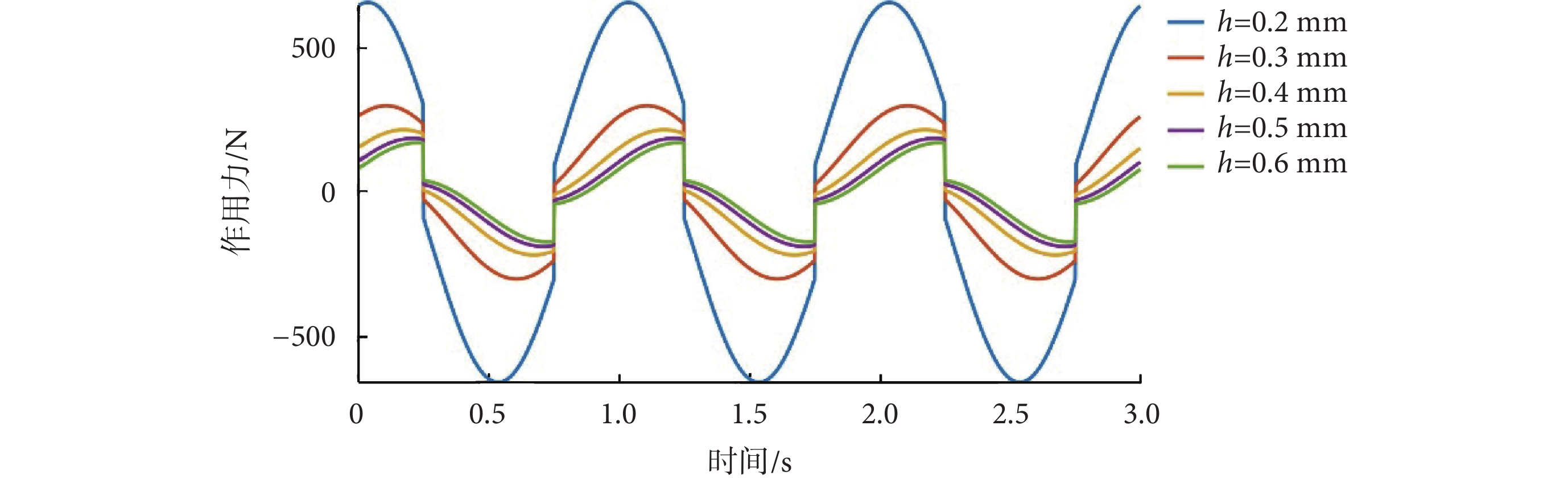
由圖5可知,當孔道直徑h為0.1 mm時作用力過大,而孔道直徑h大于0.6 mm時作用力過小且變化不明顯,均不再考慮。取孔道直徑h為0.2~0.6 mm,間隔0.1 mm,0~3 s內阻尼器作用力隨時間變化曲線如圖6所示。
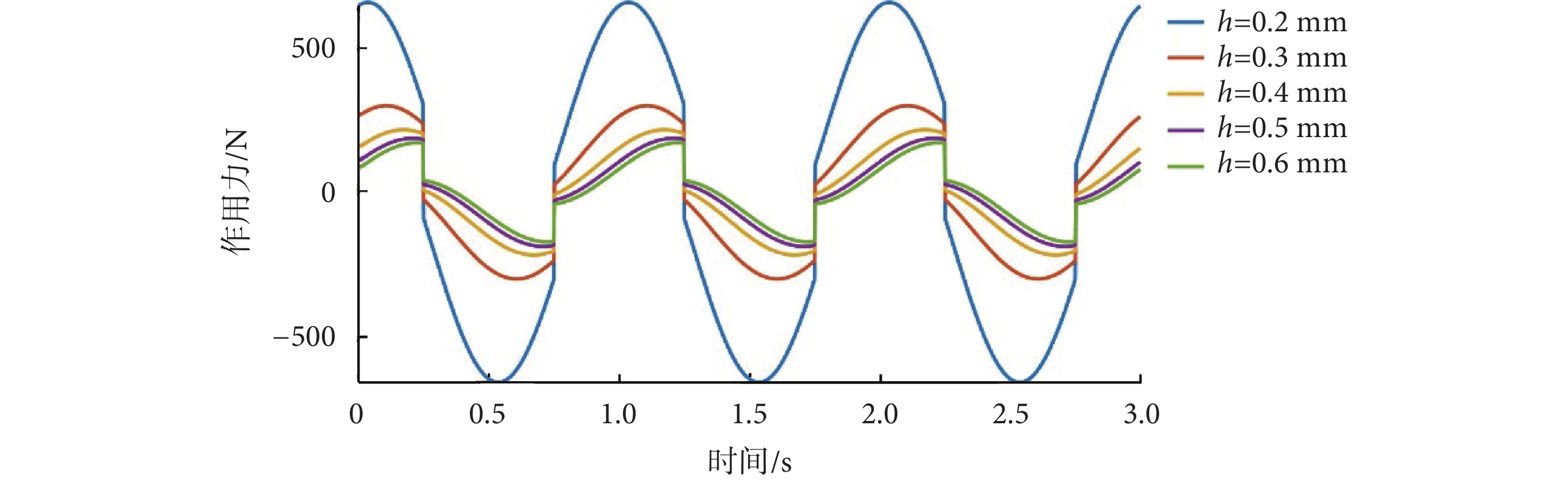 圖6
不同孔道直徑下作用力與隨時間變化曲線
Figure6.
Curves of acting force versus time variation under different hole diameters
圖6
不同孔道直徑下作用力與隨時間變化曲線
Figure6.
Curves of acting force versus time variation under different hole diameters
由圖6可知,阻尼器作用力F在時域上呈余弦函數變化規律,不同孔道直徑下作用力最大值大致出現在同一時刻,圖像在0值附近不連續,但不影響讀取作用力最大值數據。
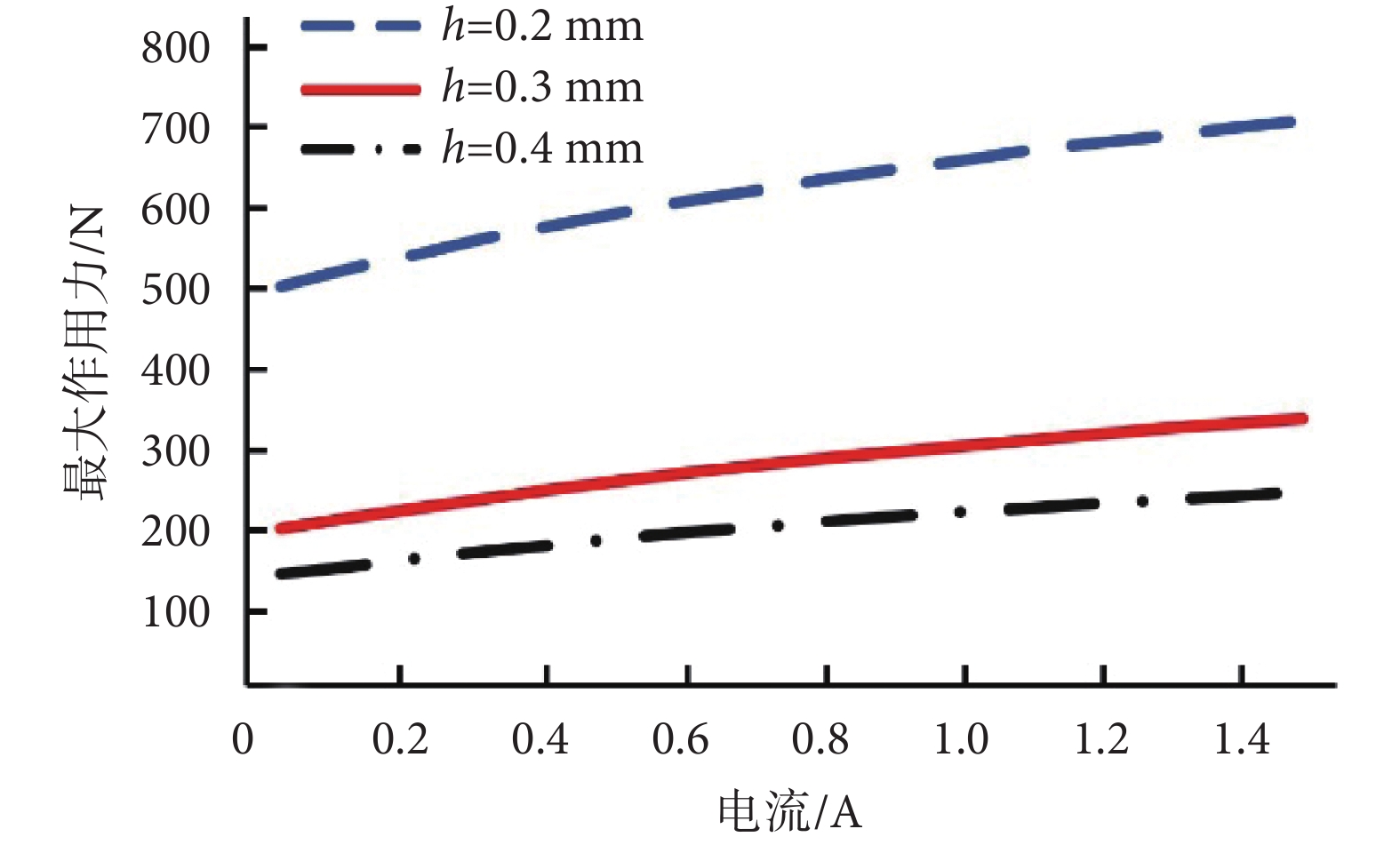
由于磁流變液的剪切屈服強度受周圍環境磁場影響,而磁場直接受線圈電流控制,故進一步對孔道直徑h為0.2、0.3、0.4 mm時阻尼器做輸出的最大阻尼力與電流的對應關系進行仿真研究,以確定孔道直徑尺寸以及最大工作電流大小,其結果如圖7所示。
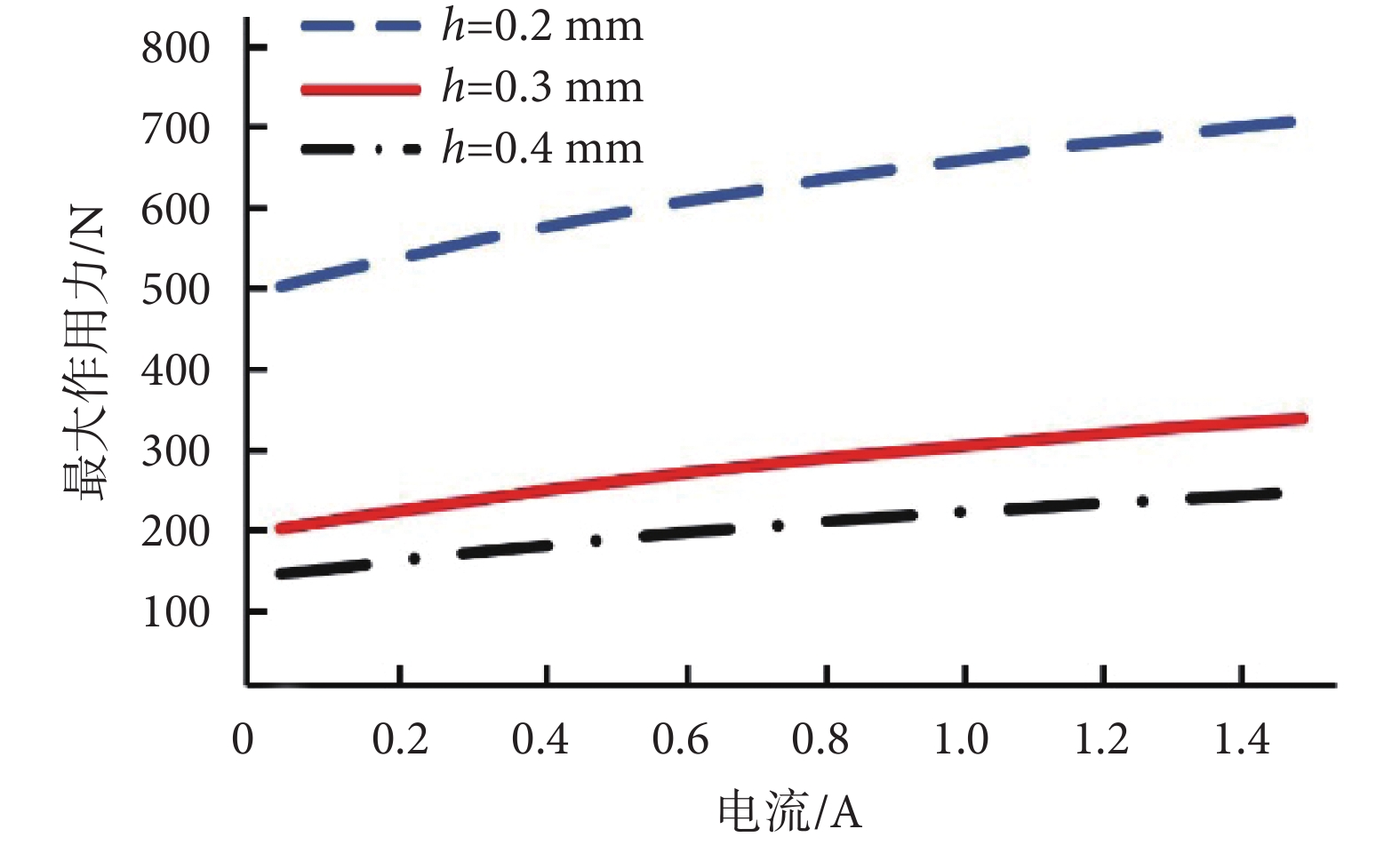 圖7
不同孔道直徑下最大作用力與電流值的對應關系
Figure7.
Corresponding relationship between maximum acting force and current value under different hole diameters
圖7
不同孔道直徑下最大作用力與電流值的對應關系
Figure7.
Corresponding relationship between maximum acting force and current value under different hole diameters
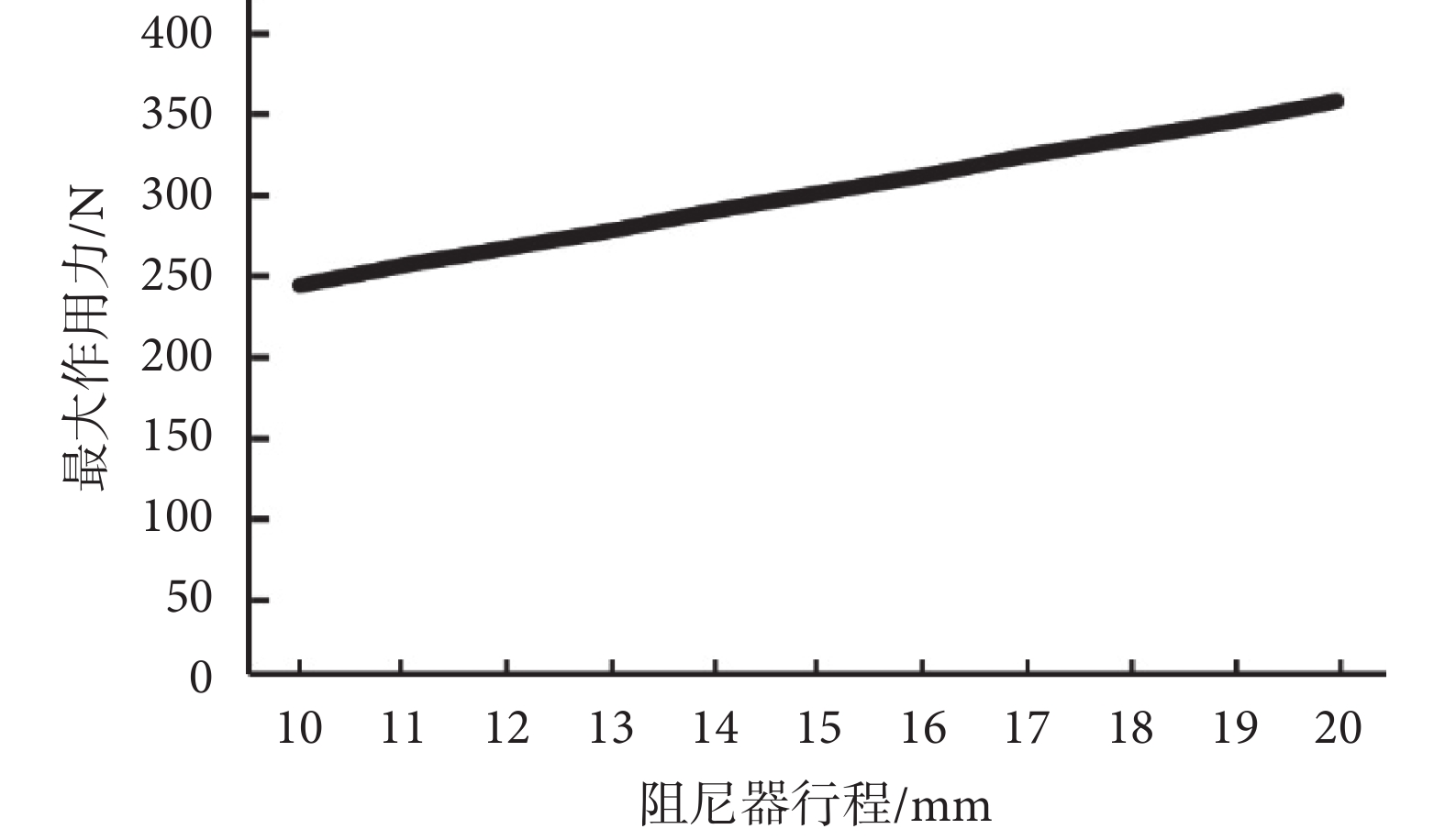
為了確定阻尼器行程,仍需進一步對所施加的外部正弦激勵的幅值進行仿真優化。在該仿真過程中認為患者單足步態頻率不變,即外部正弦激勵頻率恒定為1 Hz。考慮到患者進行康復訓練時的穩定性與安全性,阻尼器行程不宜過長,而行程過短則影響訓練效果,故外部正弦激勵的幅值取值范圍為10~20 mm,間隔為1 mm,線圈電流為1 A,仿真結果如圖8所示。
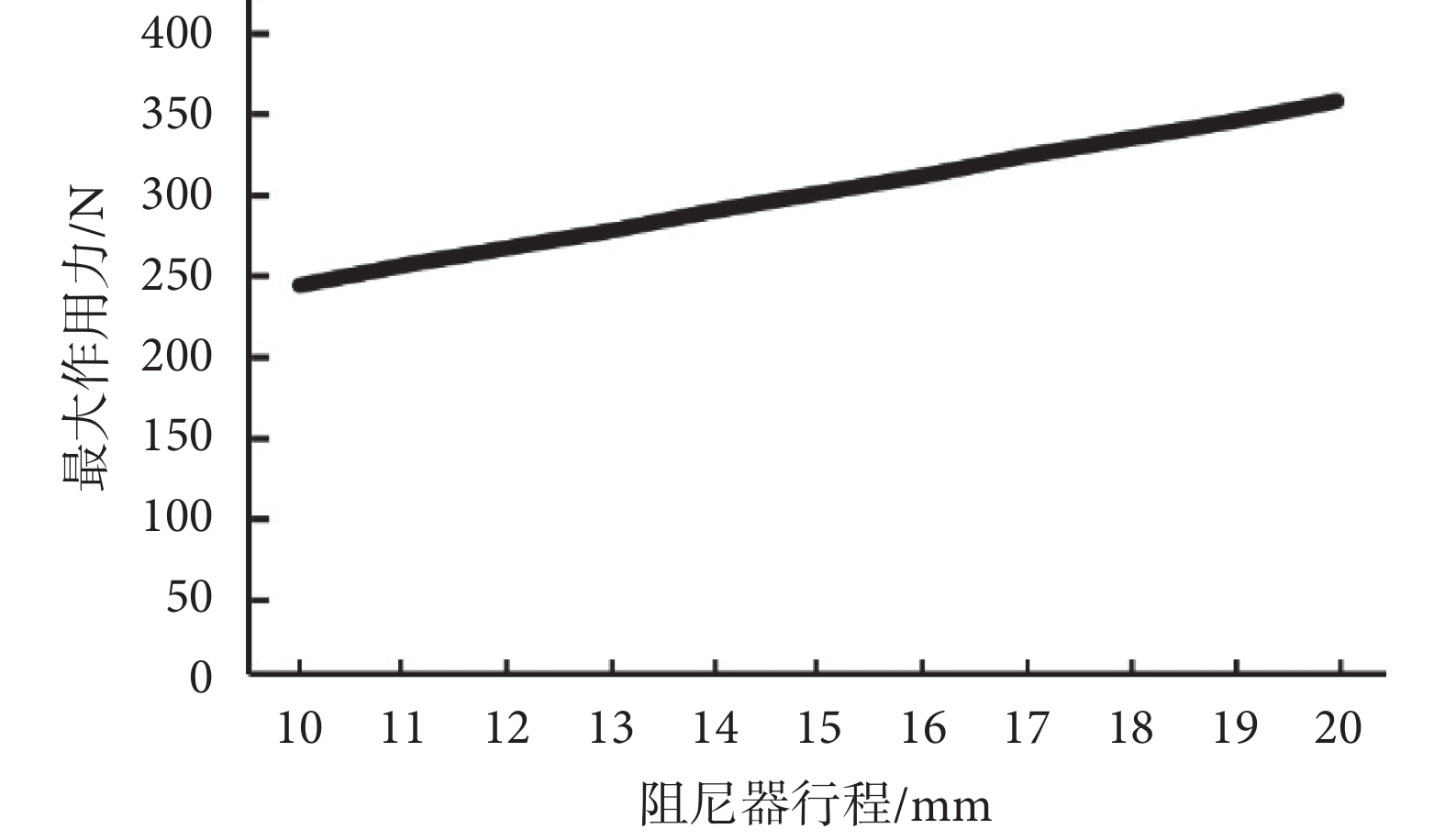 圖8
最大作用力與阻尼器行程的對應關系
Figure8.
Corresponding relationship between maximum acting force and damper stroke
圖8
最大作用力與阻尼器行程的對應關系
Figure8.
Corresponding relationship between maximum acting force and damper stroke
2.2 結構受力分析
為了方便患者穿戴進行康復訓練,需對各主要尺寸進行微型化設計,其最大整體尺寸為50 mm,而內部最小構件的最大幾何尺寸為10 mm。實際工況中,考慮成人的最大重量及其一般行走運動時所產生的動態載荷,單個阻尼器最大的負載外力Fmax設為600 N,在此基礎上考慮阻尼器不同內部結構所能承受的最大應力。因此在阻尼器各主要結構尺寸確定后,要結合主要受力部件的材料強度、剛度等參數,對受力部件進行受力分析。由于鋼材的含碳量越高,材料抗拉強度越高,而導磁能力就越低,為了兼顧材料強度與磁場的要求,缸筒選用20鋼,活塞選用電工純鐵(DT4)[17],其余零件材料選用鋁合金。
選擇設備在正常工況下所受最大外力為阻尼器的主要受力部件的載荷,借助有限元分析軟件對其進行受力分析,進行材料的強度、剛度校核,從而設計最佳尺寸與結構。以下為阻尼器活塞的分析與校核的操作過程:
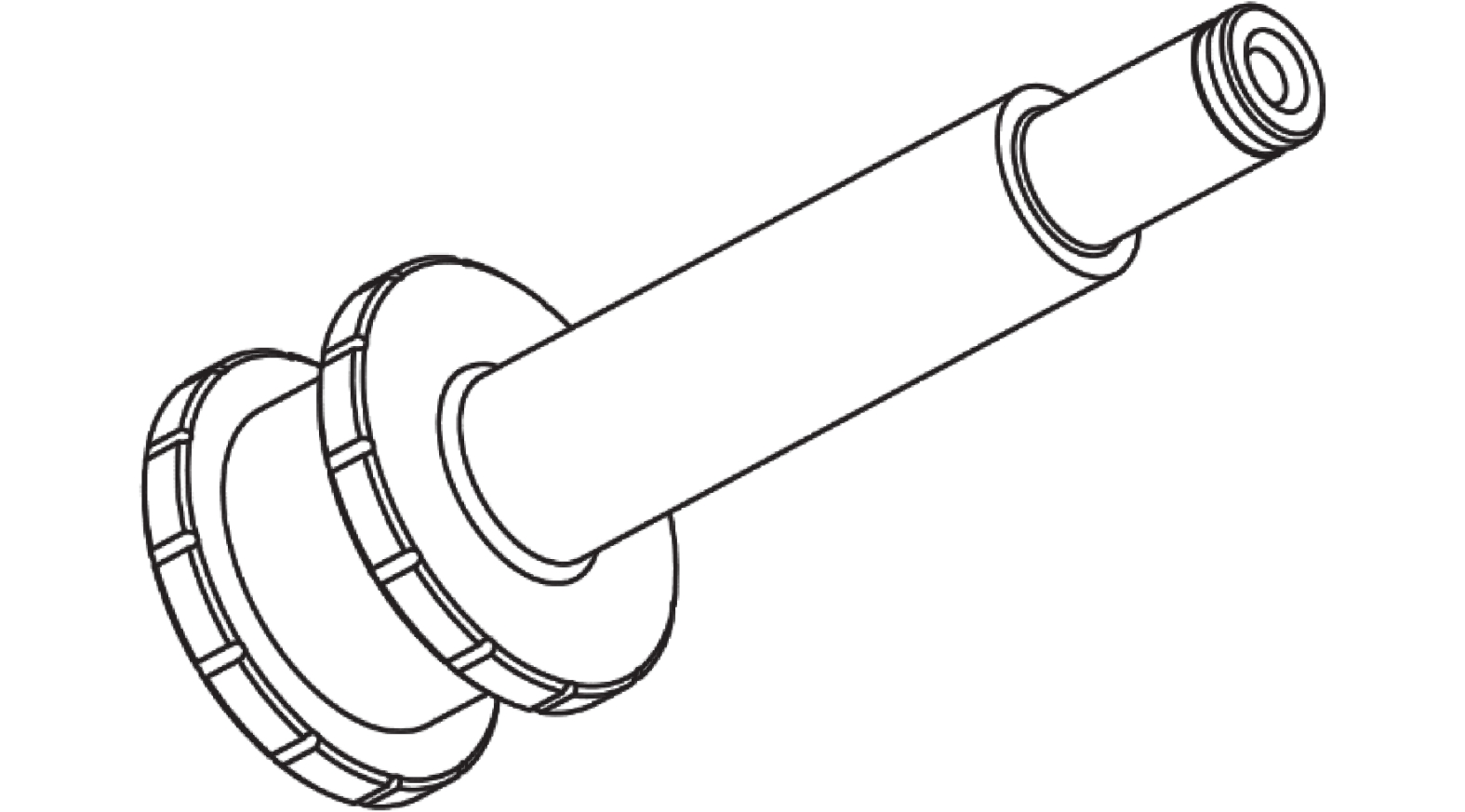
(1)在計算機輔助設計軟件中對阻尼器活塞進行三維建模,如圖9所示。
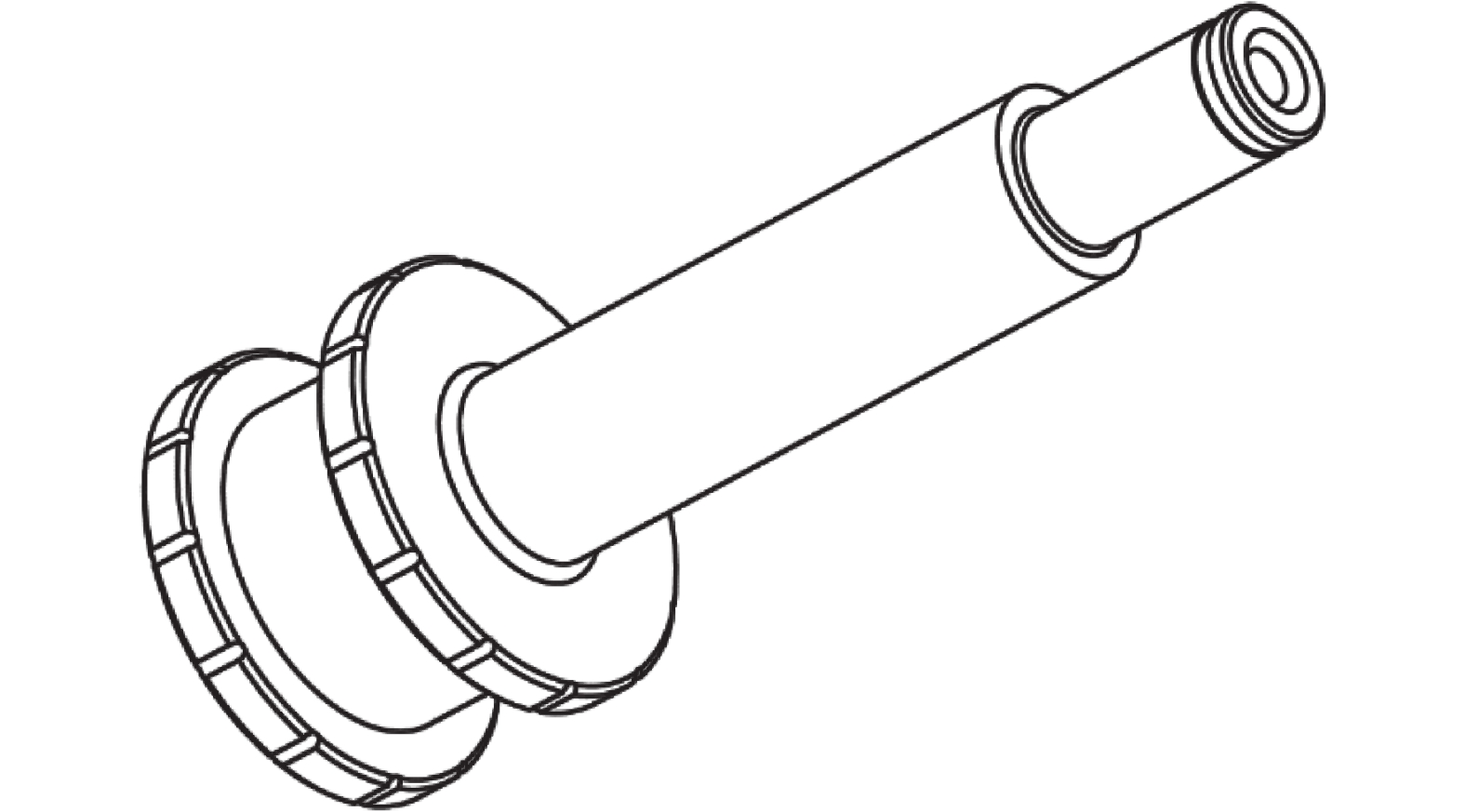 圖9
阻尼器活塞三維建模設計圖
Figure9.
3D modeling design drawing of damper piston
圖9
阻尼器活塞三維建模設計圖
Figure9.
3D modeling design drawing of damper piston
由前文所述,本裝置中磁流變液阻尼器的內活塞、外活塞與活塞桿為一體化(簡稱為活塞)結構,活塞的孔道直徑為0.3 mm,有效長度為4 mm,外徑為16 mm;活塞桿階梯處半徑為3 mm,活塞桿半徑為4 mm。
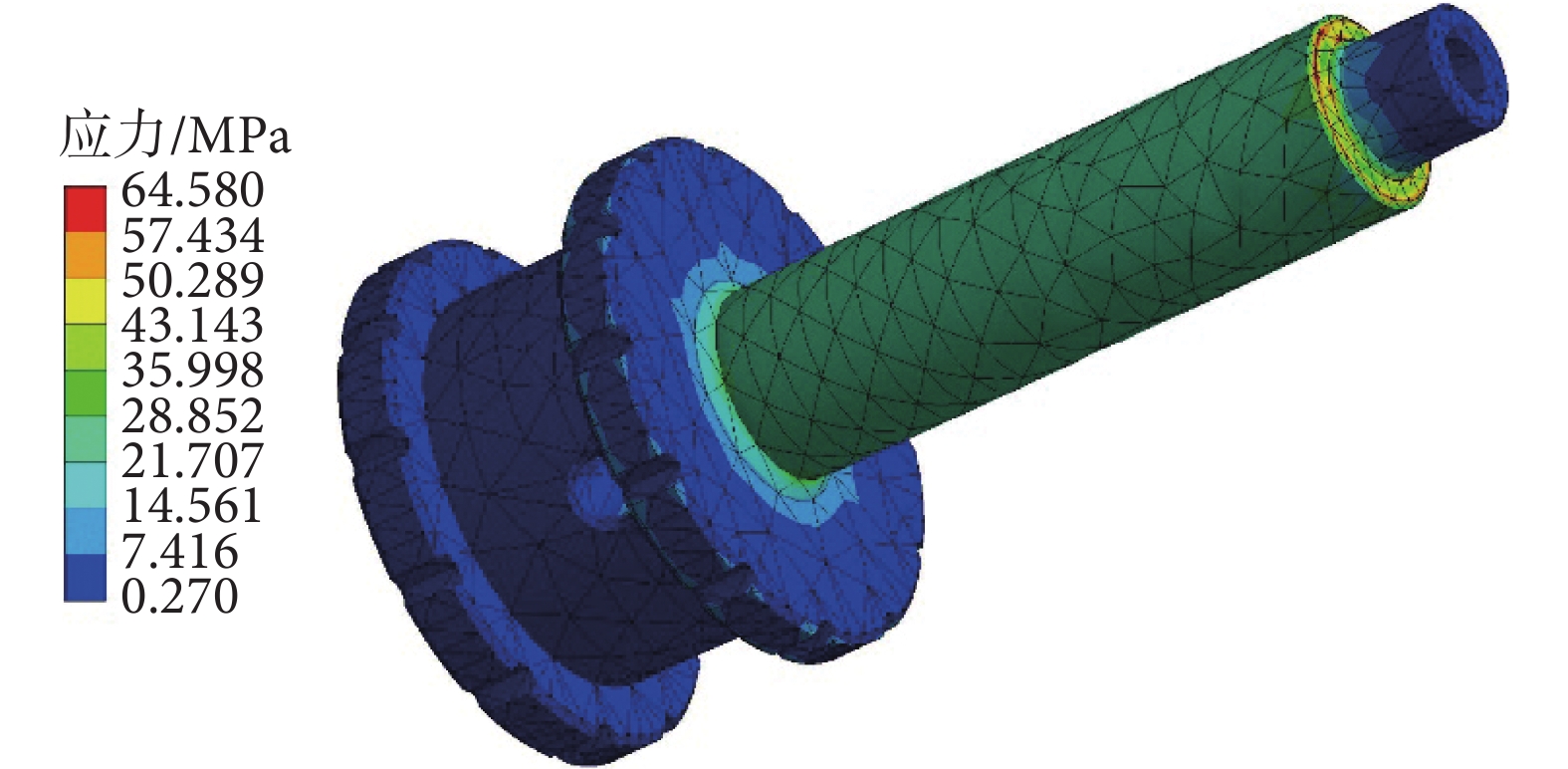
(2)選擇計算該零件的應力分布情況,其具體結果如圖10所示:
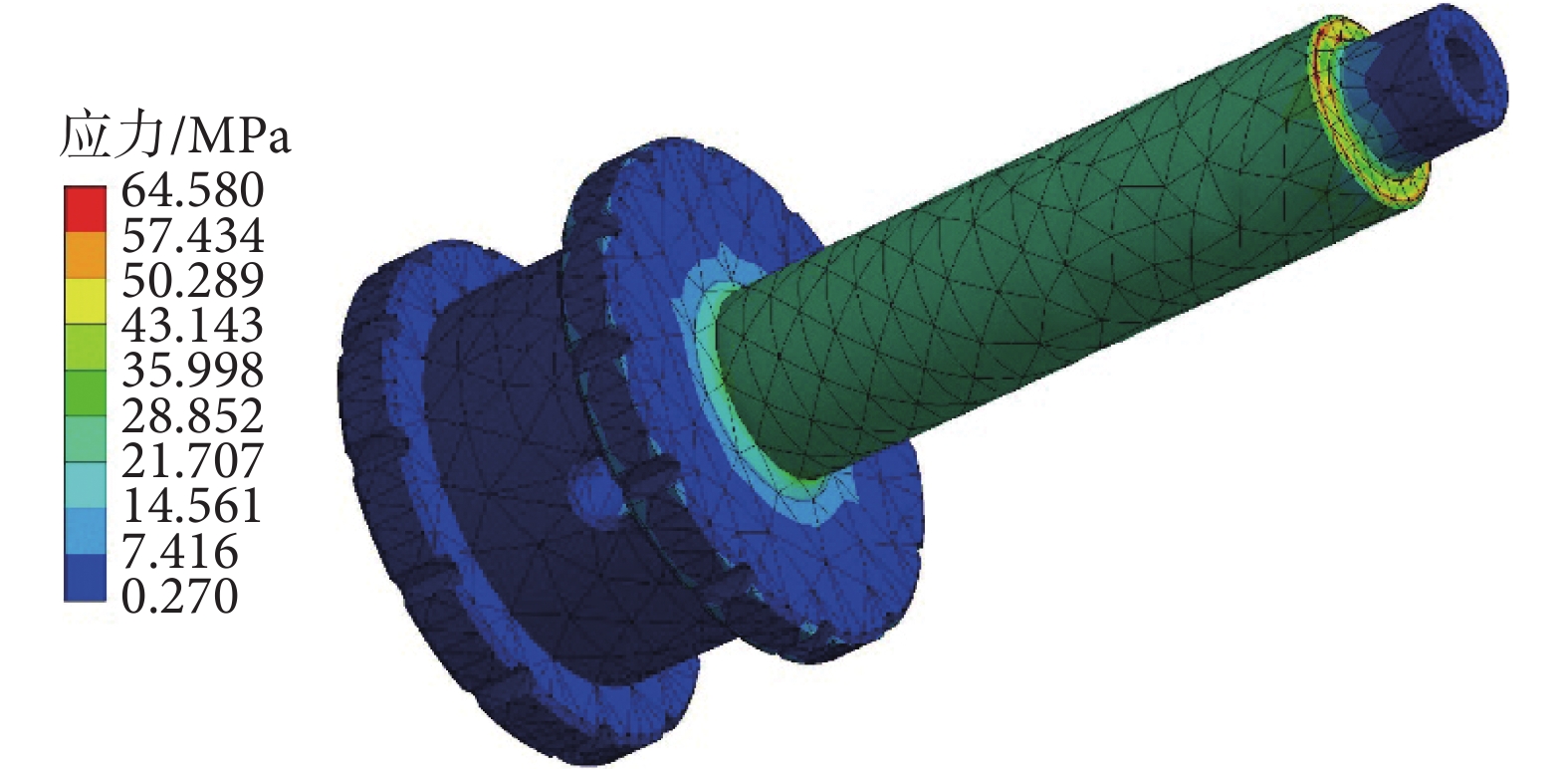 圖10
阻尼器活塞的應力云圖
Figure10.
Stress nephogram of the damper piston
圖10
阻尼器活塞的應力云圖
Figure10.
Stress nephogram of the damper piston
如前文所述,活塞材料選用電工純鐵DT4,其密度為7.87 g/cm3,楊氏模量為80.65 GPa,泊松比為0.291,屈服強度為160 MPa。將活塞無桿側端面以及外圍柱面設為固定約束,在活塞桿階梯處施加朝向活塞的力,值為600 N;設置固定約束面25個,施力面1個,網格對角線長度為43.775 mm,網格最小邊長為0.241 93 mm,網格平均表面積為14.537 mm2。
2.3 拓撲優化
由阻尼器主要受力部件的受力分析可知,其材料安全裕度較大,理論上可以進行進一步結構優化,以達到輕量化的目的,使可穿戴設備更加便攜,減輕患者進行康復訓練時由于所用裝置過重造成的額外負重。
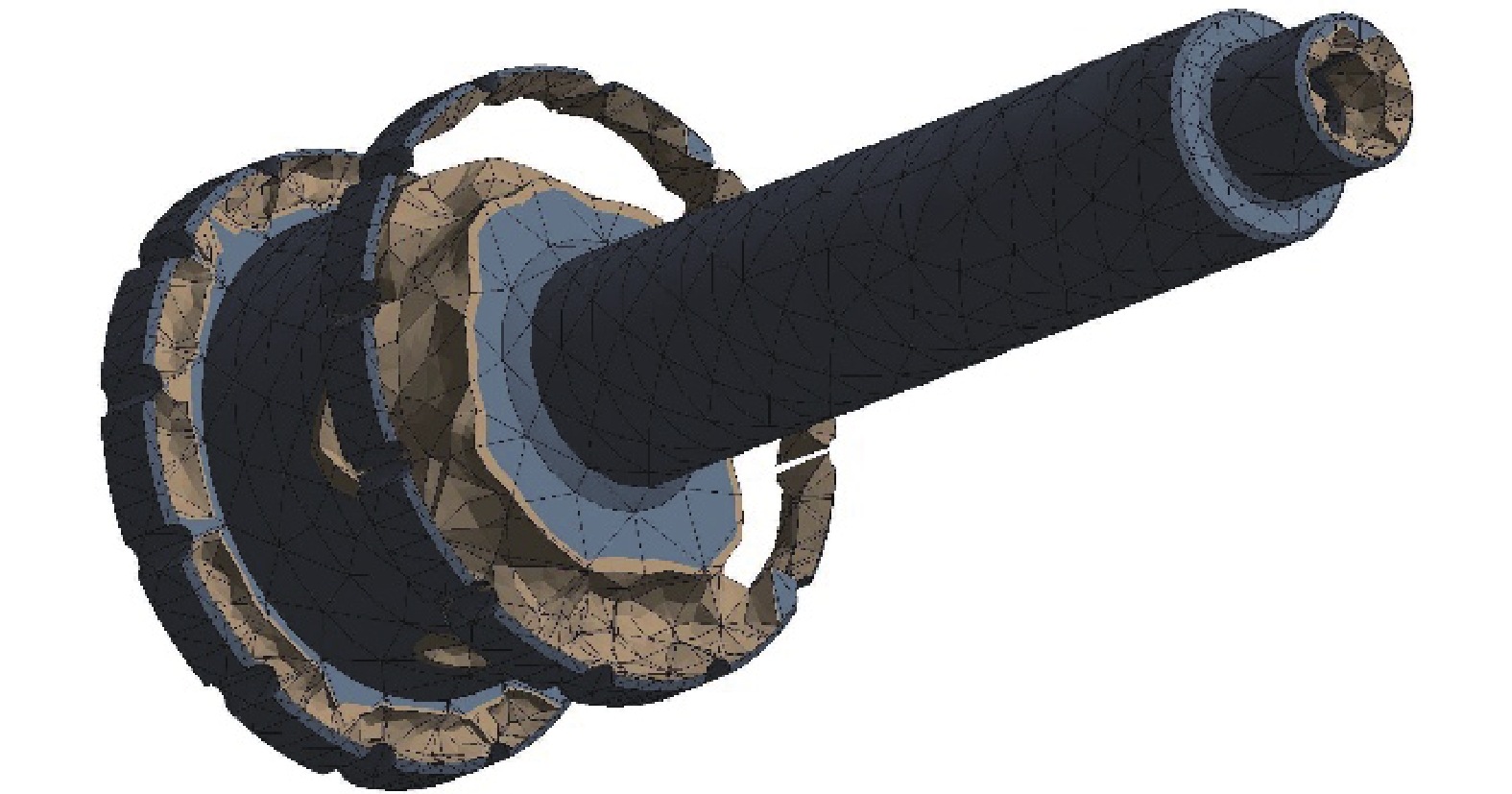
使用有限元分析軟件,在靜力分析的基礎上,對阻尼器的主要受力部件進行了結構拓撲優化,在保證阻尼器工作穩定可靠的前提下實現器件的輕量化。在微型磁流變體阻尼器中活塞為阻尼器的核心機械部件,出于安裝配合考慮,將活塞無桿側端面、活塞外圍柱面以及活塞桿階梯處設為參考面,即受約束表面,不對其進行操作,其余部分設為優化面,可對其進行減重設計。設置不同的質量保留比例,進行拓撲優化。質量保留比例為85%時的拓撲優化結果如圖11所示。
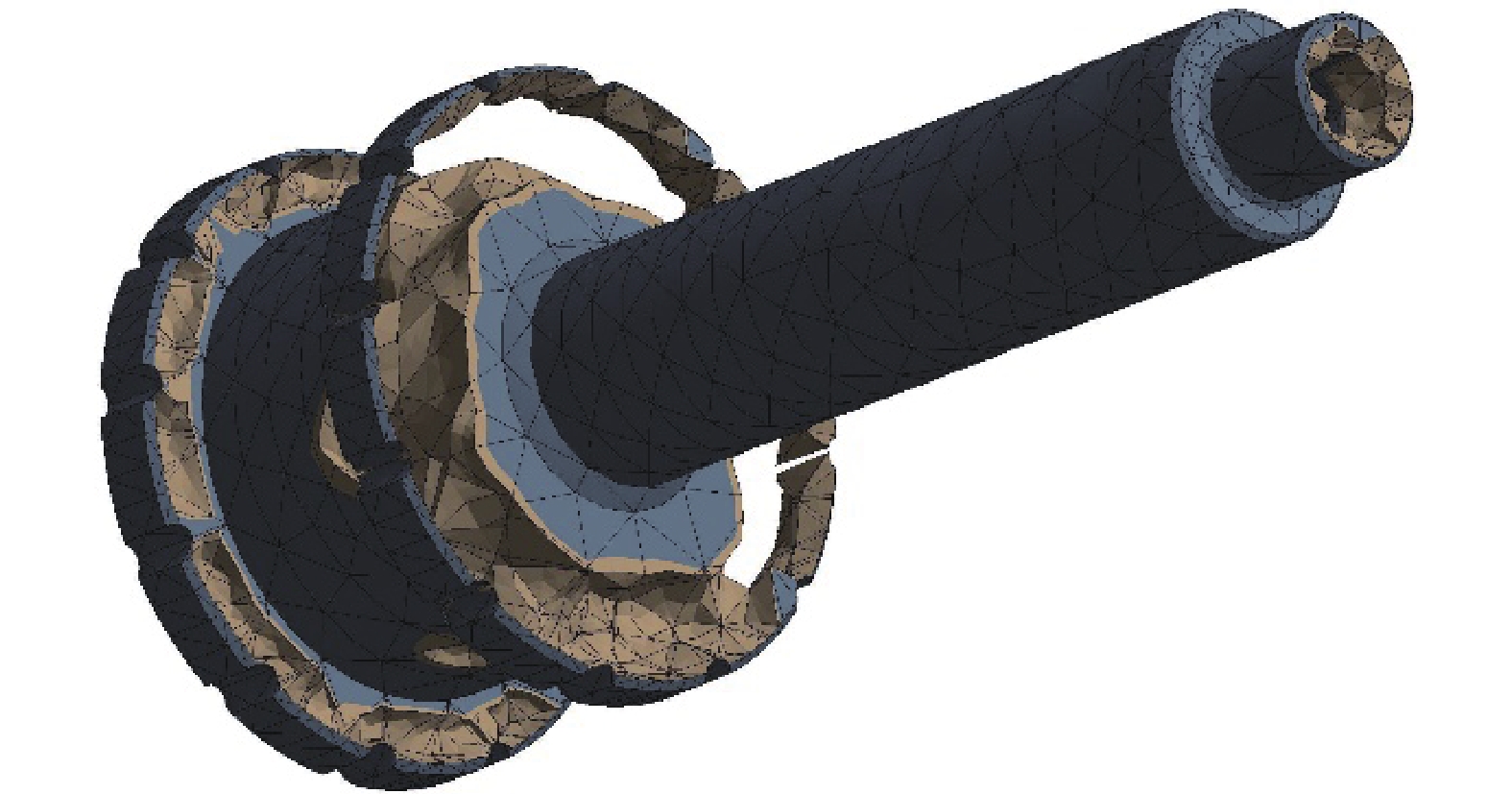 圖11
活塞拓撲優化計算結果(85%質量保留)
Figure11.
Optimized calculation results of piston topology (85% weight retention)
圖11
活塞拓撲優化計算結果(85%質量保留)
Figure11.
Optimized calculation results of piston topology (85% weight retention)
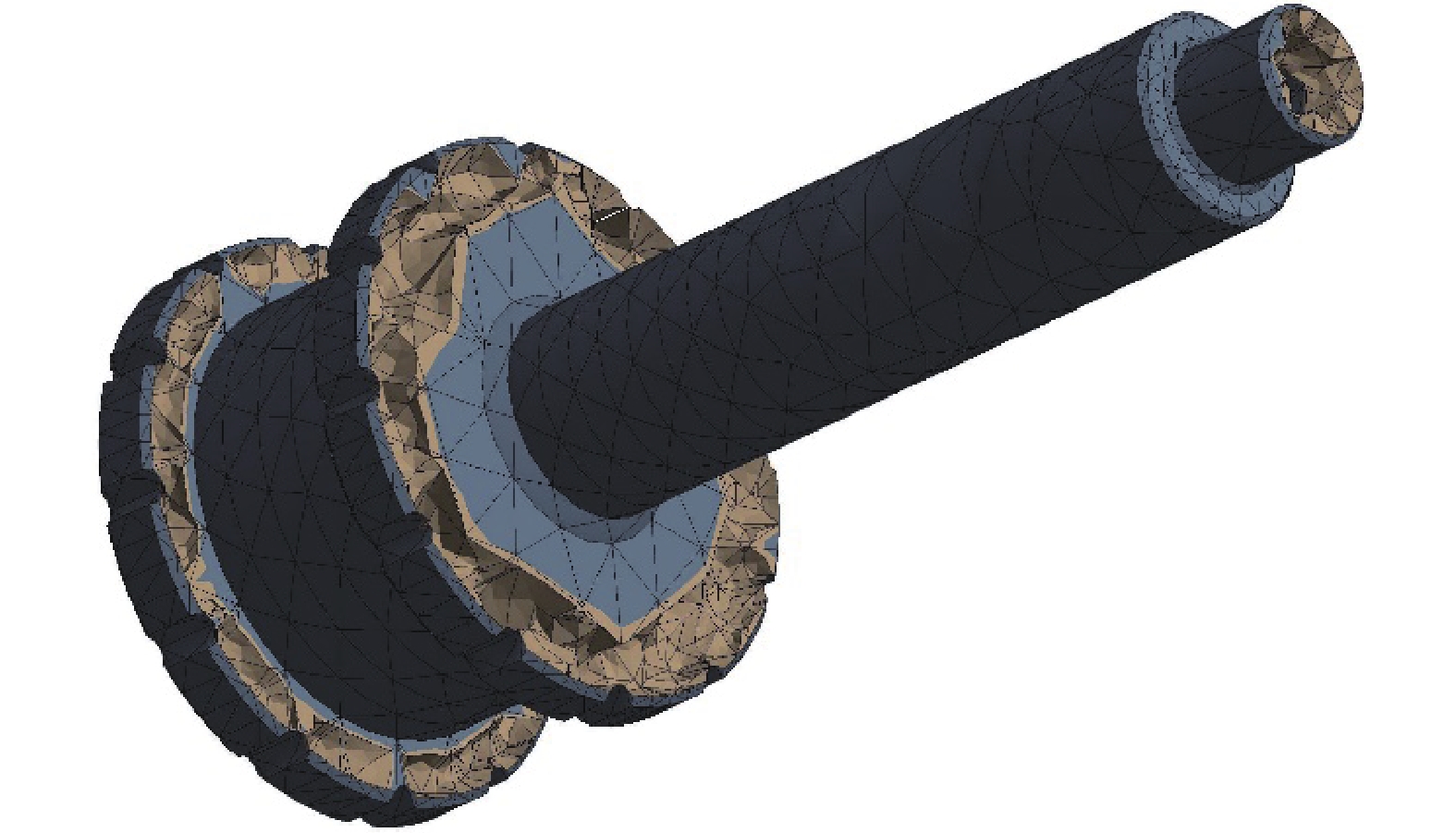
由于當質量保留比例設置為85%及以下時,零件實體不連續,不具備工程可實現性,故列出質量保留比例為90%時的計算結果,如圖12所示。
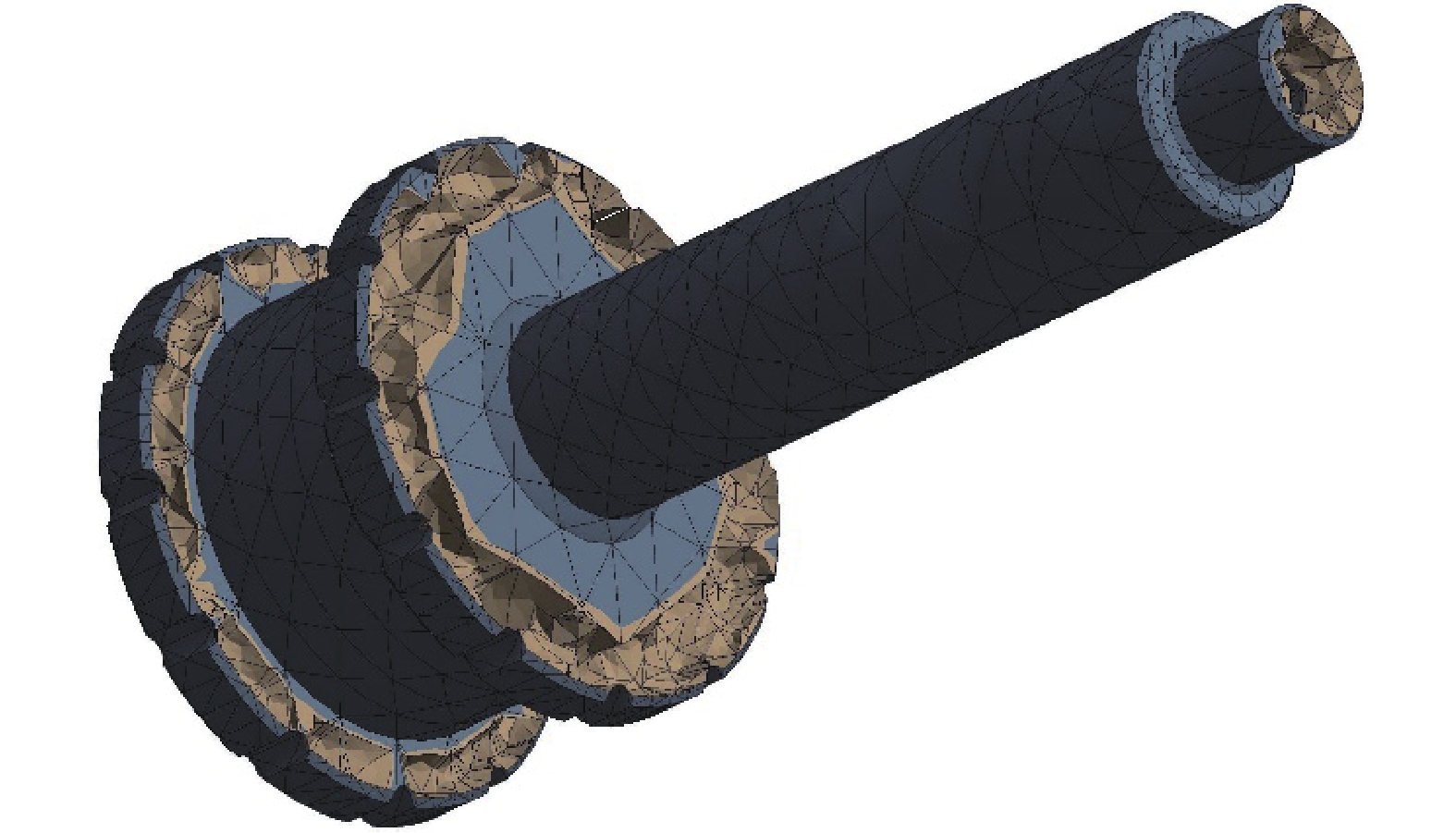 圖12
活塞拓撲優化計算結果(90%質量保留)
Figure12.
Optimized calculation results of piston topology (90% weight retention)
圖12
活塞拓撲優化計算結果(90%質量保留)
Figure12.
Optimized calculation results of piston topology (90% weight retention)
3 討論
由對孔道直徑h的仿真結果可知,在電流大小、磁場變化頻率及磁場強度一定的情況下,磁流變液阻尼器經微型化設計后,使作用力變化較大的孔道直徑區間為0.1~0.6 mm,當孔道直徑大于0.6 mm時,其變化對作用力無明顯影響;孔道直徑為0.1 mm時作用力過大,且不易加工,不適用于本系統使用場景,故不予考慮。
由最大作用力與線圈電流仿真結果可知,當線圈電流小于1.5 A時,阻尼器所輸出的最大作用力與電流大小近似成正比。結合本系統使用場景對作用力及所攜帶電源的要求,確定孔道直徑為0.3 mm,最大工作電流為1 A。
由最大作用力與阻尼器行程的仿真結果可知,阻尼器所輸出的最大作用力與阻尼器行程近似成正比。綜合考慮患者進行康復訓練時的穩定性與安全性,最終阻尼器行程設置為15 mm。
至此,阻尼器各項主要結構參數均已確定。當單足步態頻率為1 Hz,線圈電流為1 A時,單個阻尼器可對外輸出的最大作用力為300 N。
由活塞的受力分析結果可知,該零件的最大應力為64.6 MPa,出現在活塞桿階梯處,而所選用電工純鐵材料的屈服強度為160 MPa,此時材料安全裕度為147%,能夠滿足使用要求。其余主要受力部件的受力分析與強度校核過程同上,其材料屈服強度與安全裕度均滿足使用要求。
由活塞的拓撲優化結果可知,當活塞的質量保留比例為90%時,零件實體連續,可進行下一步工程設計,但由于活塞各尺寸較小,按優化結果加工會大大增加制造成本,而質量僅減少約1.5 g。綜合考慮,認為拓撲優化結果對零件減重效果不明顯,且會大幅增加加工成本,故保留原有設計。同上,對阻尼器其他主要受力部件進行相似操作后,減重效果不明顯,原有設計均予以保留。
4 結論
為了改善傳統康復訓練設備中動力機構的不足,本文提出了一種微型磁流變液阻尼器的設計。該設計利用磁流變液的材料特性,參考傳統磁流變液阻尼器,對其結構進行簡化,基于擴充的賓漢姆模型,借助可視化仿真工具對該阻尼器所輸出的作用力進行了仿真,得出了微型化磁流變液阻尼器尺寸不可盲目參考經驗值的結論,須針對其關鍵結構參數,如孔道直徑等進行優化設計,最終形成了一套選取微型磁流變液阻尼器關鍵結構參數的方法。設計者可依此方法,通過仿真確定各主要結構參數,優化關鍵參數如孔道直徑尺寸、工作電流大小以及阻尼器行程的取值,并對尺寸確定后的阻尼器進行三維建模,在此基礎上根據阻尼器在應用場景中可能受到的最大外力,利用有限元分析軟件對主要受力部件進行受力分析、強度校核以及拓撲優化設計,最終確定滿足使用要求且工程可實現的微型磁流變液阻尼器設計方案。
重要聲明
利益沖突聲明:本文全體作者均聲明不存在利益沖突。
作者貢獻聲明:解世君主要負責前期調查研究、設備結構設計、實驗方法設計、數據記錄與分析以及論文初稿撰寫;易衛東主要負責研究課題監管與指導以及論文審閱修訂;楊墨欣主要負責實驗方法設計、數據記錄與分析以及論文審閱修訂;陳永銳主要負責提供實驗指導、數據分析指導以及論文審閱修訂。
引言
生物醫學工程領域,針對受損關節、腦卒中以及腦癱康復所用的步態康復訓練設備中傳統動力調整機構往往存在體積龐大、動力響應慢、智能可控性差等問題[1-2],本文引入了磁流變液阻尼器(magnetorheological fluid damper,MRFD)作為系統的作用力輸出裝置,以期實現系統性能的提升。這種阻尼器的主要優勢在于,在受控的磁場環境中,阻尼器產生的阻尼力具有輸出響應速度快且精度高的特點,將其應用于汽車懸掛系統、飛機起落架等機械結構的減震裝置時已展現出良好的應用前景[3-5];除此以外,還可應用于生物醫學工程領域,如手功能康復訓練系統、手術機器人的力反饋器[6-7],以及假肢膝關節的阻尼力輸出裝置[8]等對輸出響應速度有較高要求且需要對阻尼力實時動態調節的場景。
磁流變液阻尼器是一種以磁流變液(magnetorheological fluid,MRF)作為阻尼液的動態阻尼器。其可通過改變外加磁場強度繼而改變磁流變液的剪切屈服強度,且該變化響應迅速可靠,進一步可實現對設備輸出力的實時動態調節。另外,通過簡化磁流變液阻尼器的結構,可縮小阻尼器的幾何尺寸,從而實現設備整體的輕量化和結構的緊湊化,這對于穿戴式康復設備的便攜化與智能化至關重要,同時在一定程度上突破了傳統動力調整機構的局限性。
為了對應用于穿戴式康復設備的微型磁流變液阻尼器進行優化設計,有必要結合磁流變阻尼液的特性和實際需要,研究與之相適配的阻尼器機械結構及其相關參數。本文將基于擴充的賓漢姆(Bingham)模型對磁流變液所輸出的作用力進行仿真,以此對活塞結構參數進行優化,并利用有限元分析軟件對其主要零部件進行應力校核以及拓撲優化,最終給出一種用于穿戴式康復設備的微型磁流變液阻尼器的優化設計方法。
1 基本方法
為了得到設計合理并優化的磁流變液阻尼器,首先要對磁流變液特性進行研究,然后結合其特性,研究相應阻尼器的機械結構與磁流變液的合理優化配置,最終實現磁流變液阻尼器的優化設計。
1.1 結構設計
廣泛應用的傳統單桿式磁流變液阻尼器結構如圖1所示,主要由兩側端蓋、缸筒、內活塞、外活塞、活塞桿、線圈以及膜片等零部件組成。由于液體的不可壓縮特性,單桿式阻尼器的活塞做往復運動時,有桿腔與無桿腔之間存在體積差,導致無法運動,故需要有密封條件良好的儲氣腔儲存體積可壓縮的氣體,同時需要膜片或類似結構將儲氣腔與儲液腔隔絕開,才能夠滿足使用要求。線圈,通過接通電流產生外加于磁變流體的電磁場;活塞桿處,為中空設計,方便布置控制電磁線圈的導電線。阻尼器工作時,過孔周圍磁場強度受到纏繞于內活塞上的線圈電流控制,磁流變液的粘度與剪切屈服強度隨之變化,液體受迫流經位于外活塞上的過孔,對外輸出連續可調的阻尼力。外活塞與缸筒之間、活塞桿與端蓋之間都需要相應的密封設計。
圖1
傳統磁流變液阻尼器結構示意圖
Figure1.
Schematic diagram of the structure of traditional magnetorheological fluid damper
若按照傳統磁流變液阻尼器結構等比例縮小,制成微型磁流變液減震器,其內部的微小復雜結構難以加工,制造成本將大幅提高。考慮到在正常工作時,阻尼器內的磁流變液將在有桿腔與無桿腔間往復流動,故取消外活塞設計,減少原活塞處的密封裝置,并在內活塞外沿開槽,作為液體過孔。將活塞桿與活塞做一體化設計,以簡化零件結構,降低制作成本。活塞與活塞桿仍做中空設計,以布置磁場線圈導線。膜片與活塞桿與端蓋間的密封裝置予以保留。經簡化后的磁流變液阻尼器結構如圖2所示。
圖2
簡化設計的磁流變液阻尼器結構示意圖
Figure2.
Schematic diagram of simplified design of magnetorheological fluid damper
經簡化設計的微型磁流變液阻尼器不僅能夠實現傳統磁流變液阻尼器的功能,且結構簡單,便于加工,有利于實現各零部件主要尺寸的微型化。
1.2 仿真與分析
磁流變液阻尼器結構實現了微型化,但其主要性能參數,如阻尼力輸出特性等,是否能夠滿足應用的要求,可通過計算機仿真進行驗證。
1.2.1 磁流變體數學模型
磁流變液是磁流變液阻尼器中的關鍵材料,它的特性關系到阻尼器的動態響應行為,理論上,其特性可用不同類型的數學模型進行描述,如修正的布克-溫(Bouc-wen)模型等參數化模型[9-11],或神經網絡模型等非參數化模型[12]。考慮到本文所述設備的應用場景,以及對控制精度與響應速度的要求,且在設計初期需要得知阻尼器的最大輸出阻尼力,選擇擴充的賓漢姆模型[13]較為合適,其數學模型如式(1)所示:
|
式中,Fd是阻尼器所產生的阻尼力;L是活塞有效長度;Ap是活塞的有效面積;h是孔道直徑;τy是磁流變液的屈服強度,與阻尼器線圈電流有關;sgn()為符號函數,指出括號內參數的正負號;是阻尼器活塞與缸體間的相對速度;η是磁流變液的動力粘度系數;D是缸體內徑;f0為蓄能器引起的阻尼器出力偏差(可忽略)。其中,磁流變液的屈服強度τy計算公式如式(2)所示:
|
式中,、,均為與磁流變液性能相關的系數[14];I為電流大小;e為自然常數。
考慮在本磁流變液阻尼器上存在回復力作用,故在擴充的賓漢姆模型中增加一線性項以模擬彈簧所起的作用,彈簧彈力與阻尼器所提供的阻尼力共同作用,形成作用力F,得到改進的模型結構如圖3所示。
圖3
仿真模型結構圖
Figure3.
Diagram of simulation model structure
圖3中,忽略蓄能器所引起的阻尼器出力偏差,在并聯彈簧后,阻尼器所輸出的作用力F如式(3)所示:
|
式中,k為彈簧的彈性系數,x為活塞與缸筒間的相對位移。
由式(3)可以看出,磁流變液阻尼器所輸出的作用力F可以分解為三項:其中第一項是與磁流變體剪切應力和速度方向有關的流體內摩擦力,可以通過改變阻尼器內充填的磁流變液的剪切屈服強度控制其大小,為可控阻尼力,記作F1,與過孔孔道直徑h成反比;第二項與速度呈線性關系,可以看作為粘滯力,為不可控阻尼力,記作F2,與孔道直徑h的三次方成反比;第三項為彈簧所提供的彈力,與彈簧的彈性系數和彈簧的形變量有關,記作F3。由此可見,在磁流體物理特性確定的條件下,過孔的孔道直徑h是影響輸出阻尼力的關健參數,是仿真時要特別研究的參數。
1.2.2 受力分析與拓撲優化
由于本文所研究的微型磁流變液阻尼器在實際工況中需要承受較大外力,在阻尼器各主要結構尺寸確定后,還需通過軟件對各零部件進行三維建模,借助計算機輔助工程分析軟件Workbench 2019 R2(ANSYS Inc., 美國)對阻尼器的主要受力部件進行受力分析,并對其強度、剛度進行校核。
若受力分析結果顯示其結構應力滿足使用要求,且材料安全裕度較大時,為了實現輕量化設計,應對所設計的零件進行結構拓撲優化,以減輕重量,同時節約材料,降低成本。
2 結果分析
2.1 孔道直徑優化
考慮到微型化的要求,本文所研究的微型磁流變液阻尼器各主要尺寸相對傳統磁流變液阻尼器均有大幅縮小,而缸徑、行程等受結構及使用要求限制保持不變。基于并聯彈簧改進后擴充的賓漢姆模型,如式(3)所示,阻尼器中流體過孔孔道直徑h將是對所輸出的阻尼力有顯著影響的重要參數,通過建立適當的模型和仿真,找出最佳參數值。
依據前文所述改進后擴充的賓漢姆模型,借助科學計算工程軟件MATLAB R2019b(MathWorks Inc., 美國)的可視化仿真工具Simulink,對模型進行模塊化建模和仿真。阻尼器所輸出阻尼力的模塊框圖如圖4所示。
圖4
作用力仿真模塊框圖
Figure4.
Block diagram of the acting force of simulation module
圖4中,I為線圈電流值,單位:A;sin為阻尼器外加正弦位移激勵,單位:mm;v代表對位移求導,得到阻尼器活塞相對缸筒的速度;F1、F2、F3分別代表前文所述摩擦力、粘滯力與彈簧彈力;add表示三項相加;F代表最終得到阻尼器作用力輸出值,單位: N。
基于本文所述微型磁流變液阻尼器,模型中彈簧彈性系數k取7 N/mm,動力粘度系數η取1 Pa?s,活塞的有效長度L為4 mm,缸體內徑D為16 mm,活塞的有效面積Ap為200 mm2。
阻尼器主要結構尺寸設定依據如下:① 為了使設備結構盡可能緊湊的同時,方便采購阻尼器內部其他標準化配件,降低設備整體制作成本,缸體內徑設為16 mm;② 考慮到實際加工難易程度,活塞有效長度設為4 mm;③ 由于本文所述阻尼器實際工況為下壓狀態,即活塞向膜片方向運動,故活塞有效面積為活塞無桿側橫截面積,大小為200 mm2;④ 受緊湊結構限制,所選彈簧彈性系數k為7 N/mm。
傳統磁流變液阻尼器孔道直徑h的最優取值為0.8~2.0 mm[15],相較于此,在本微型磁流變液阻尼器中,孔道直徑的上限設為1.0 mm,下限為0.1 mm。
確定孔道直徑h取值范圍為0.1~1.0 mm,間隔為0.1 mm。阻尼器電磁線圈輸入電流為1 A,以便穿戴設備電源供電。參照常人的單足步態頻率[16],設置阻尼器外部施加的正弦位移激勵頻率為1 Hz,以模擬進行康復訓練患者的單足步態頻率;正弦位移激勵幅值為18 mm[6],以模擬阻尼器的最大行程。阻尼器最大作用力與孔道直徑的仿真結果如圖5所示。
圖5
最大作用力與孔道直徑仿真結果
Figure5.
Simulation results of maximum acting force and hole diameter
由圖5可知,當孔道直徑h為0.1 mm時作用力過大,而孔道直徑h大于0.6 mm時作用力過小且變化不明顯,均不再考慮。取孔道直徑h為0.2~0.6 mm,間隔0.1 mm,0~3 s內阻尼器作用力隨時間變化曲線如圖6所示。
圖6
不同孔道直徑下作用力與隨時間變化曲線
Figure6.
Curves of acting force versus time variation under different hole diameters
由圖6可知,阻尼器作用力F在時域上呈余弦函數變化規律,不同孔道直徑下作用力最大值大致出現在同一時刻,圖像在0值附近不連續,但不影響讀取作用力最大值數據。
由于磁流變液的剪切屈服強度受周圍環境磁場影響,而磁場直接受線圈電流控制,故進一步對孔道直徑h為0.2、0.3、0.4 mm時阻尼器做輸出的最大阻尼力與電流的對應關系進行仿真研究,以確定孔道直徑尺寸以及最大工作電流大小,其結果如圖7所示。
圖7
不同孔道直徑下最大作用力與電流值的對應關系
Figure7.
Corresponding relationship between maximum acting force and current value under different hole diameters
為了確定阻尼器行程,仍需進一步對所施加的外部正弦激勵的幅值進行仿真優化。在該仿真過程中認為患者單足步態頻率不變,即外部正弦激勵頻率恒定為1 Hz。考慮到患者進行康復訓練時的穩定性與安全性,阻尼器行程不宜過長,而行程過短則影響訓練效果,故外部正弦激勵的幅值取值范圍為10~20 mm,間隔為1 mm,線圈電流為1 A,仿真結果如圖8所示。
圖8
最大作用力與阻尼器行程的對應關系
Figure8.
Corresponding relationship between maximum acting force and damper stroke
2.2 結構受力分析
為了方便患者穿戴進行康復訓練,需對各主要尺寸進行微型化設計,其最大整體尺寸為50 mm,而內部最小構件的最大幾何尺寸為10 mm。實際工況中,考慮成人的最大重量及其一般行走運動時所產生的動態載荷,單個阻尼器最大的負載外力Fmax設為600 N,在此基礎上考慮阻尼器不同內部結構所能承受的最大應力。因此在阻尼器各主要結構尺寸確定后,要結合主要受力部件的材料強度、剛度等參數,對受力部件進行受力分析。由于鋼材的含碳量越高,材料抗拉強度越高,而導磁能力就越低,為了兼顧材料強度與磁場的要求,缸筒選用20鋼,活塞選用電工純鐵(DT4)[17],其余零件材料選用鋁合金。
選擇設備在正常工況下所受最大外力為阻尼器的主要受力部件的載荷,借助有限元分析軟件對其進行受力分析,進行材料的強度、剛度校核,從而設計最佳尺寸與結構。以下為阻尼器活塞的分析與校核的操作過程:
(1)在計算機輔助設計軟件中對阻尼器活塞進行三維建模,如圖9所示。
圖9
阻尼器活塞三維建模設計圖
Figure9.
3D modeling design drawing of damper piston
由前文所述,本裝置中磁流變液阻尼器的內活塞、外活塞與活塞桿為一體化(簡稱為活塞)結構,活塞的孔道直徑為0.3 mm,有效長度為4 mm,外徑為16 mm;活塞桿階梯處半徑為3 mm,活塞桿半徑為4 mm。
(2)選擇計算該零件的應力分布情況,其具體結果如圖10所示:
圖10
阻尼器活塞的應力云圖
Figure10.
Stress nephogram of the damper piston
如前文所述,活塞材料選用電工純鐵DT4,其密度為7.87 g/cm3,楊氏模量為80.65 GPa,泊松比為0.291,屈服強度為160 MPa。將活塞無桿側端面以及外圍柱面設為固定約束,在活塞桿階梯處施加朝向活塞的力,值為600 N;設置固定約束面25個,施力面1個,網格對角線長度為43.775 mm,網格最小邊長為0.241 93 mm,網格平均表面積為14.537 mm2。
2.3 拓撲優化
由阻尼器主要受力部件的受力分析可知,其材料安全裕度較大,理論上可以進行進一步結構優化,以達到輕量化的目的,使可穿戴設備更加便攜,減輕患者進行康復訓練時由于所用裝置過重造成的額外負重。
使用有限元分析軟件,在靜力分析的基礎上,對阻尼器的主要受力部件進行了結構拓撲優化,在保證阻尼器工作穩定可靠的前提下實現器件的輕量化。在微型磁流變體阻尼器中活塞為阻尼器的核心機械部件,出于安裝配合考慮,將活塞無桿側端面、活塞外圍柱面以及活塞桿階梯處設為參考面,即受約束表面,不對其進行操作,其余部分設為優化面,可對其進行減重設計。設置不同的質量保留比例,進行拓撲優化。質量保留比例為85%時的拓撲優化結果如圖11所示。
圖11
活塞拓撲優化計算結果(85%質量保留)
Figure11.
Optimized calculation results of piston topology (85% weight retention)
由于當質量保留比例設置為85%及以下時,零件實體不連續,不具備工程可實現性,故列出質量保留比例為90%時的計算結果,如圖12所示。
圖12
活塞拓撲優化計算結果(90%質量保留)
Figure12.
Optimized calculation results of piston topology (90% weight retention)
3 討論
由對孔道直徑h的仿真結果可知,在電流大小、磁場變化頻率及磁場強度一定的情況下,磁流變液阻尼器經微型化設計后,使作用力變化較大的孔道直徑區間為0.1~0.6 mm,當孔道直徑大于0.6 mm時,其變化對作用力無明顯影響;孔道直徑為0.1 mm時作用力過大,且不易加工,不適用于本系統使用場景,故不予考慮。
由最大作用力與線圈電流仿真結果可知,當線圈電流小于1.5 A時,阻尼器所輸出的最大作用力與電流大小近似成正比。結合本系統使用場景對作用力及所攜帶電源的要求,確定孔道直徑為0.3 mm,最大工作電流為1 A。
由最大作用力與阻尼器行程的仿真結果可知,阻尼器所輸出的最大作用力與阻尼器行程近似成正比。綜合考慮患者進行康復訓練時的穩定性與安全性,最終阻尼器行程設置為15 mm。
至此,阻尼器各項主要結構參數均已確定。當單足步態頻率為1 Hz,線圈電流為1 A時,單個阻尼器可對外輸出的最大作用力為300 N。
由活塞的受力分析結果可知,該零件的最大應力為64.6 MPa,出現在活塞桿階梯處,而所選用電工純鐵材料的屈服強度為160 MPa,此時材料安全裕度為147%,能夠滿足使用要求。其余主要受力部件的受力分析與強度校核過程同上,其材料屈服強度與安全裕度均滿足使用要求。
由活塞的拓撲優化結果可知,當活塞的質量保留比例為90%時,零件實體連續,可進行下一步工程設計,但由于活塞各尺寸較小,按優化結果加工會大大增加制造成本,而質量僅減少約1.5 g。綜合考慮,認為拓撲優化結果對零件減重效果不明顯,且會大幅增加加工成本,故保留原有設計。同上,對阻尼器其他主要受力部件進行相似操作后,減重效果不明顯,原有設計均予以保留。
4 結論
為了改善傳統康復訓練設備中動力機構的不足,本文提出了一種微型磁流變液阻尼器的設計。該設計利用磁流變液的材料特性,參考傳統磁流變液阻尼器,對其結構進行簡化,基于擴充的賓漢姆模型,借助可視化仿真工具對該阻尼器所輸出的作用力進行了仿真,得出了微型化磁流變液阻尼器尺寸不可盲目參考經驗值的結論,須針對其關鍵結構參數,如孔道直徑等進行優化設計,最終形成了一套選取微型磁流變液阻尼器關鍵結構參數的方法。設計者可依此方法,通過仿真確定各主要結構參數,優化關鍵參數如孔道直徑尺寸、工作電流大小以及阻尼器行程的取值,并對尺寸確定后的阻尼器進行三維建模,在此基礎上根據阻尼器在應用場景中可能受到的最大外力,利用有限元分析軟件對主要受力部件進行受力分析、強度校核以及拓撲優化設計,最終確定滿足使用要求且工程可實現的微型磁流變液阻尼器設計方案。
重要聲明
利益沖突聲明:本文全體作者均聲明不存在利益沖突。
作者貢獻聲明:解世君主要負責前期調查研究、設備結構設計、實驗方法設計、數據記錄與分析以及論文初稿撰寫;易衛東主要負責研究課題監管與指導以及論文審閱修訂;楊墨欣主要負責實驗方法設計、數據記錄與分析以及論文審閱修訂;陳永銳主要負責提供實驗指導、數據分析指導以及論文審閱修訂。