在上肢康復機器人輔助訓練過程中,對于軟癱期腦卒中患者通常采用被動訓練策略。為了激發患者的主動康復意愿,對于逐漸具備主動發力能力的患者,康復治療師會采用機器人助動訓練策略。本文針對末端牽引式上肢康復機器人,提出一種基于交互力模糊判別的人體上肢運動功能評估方法以及按需輔助的人機交互控制策略。首先設計了基于計算力矩控制器的被動訓練和結合勢能場的助動訓練模式,然后將訓練過程中三維力傳感器采集的交互力信息引入至模糊推理系統中,提出了主動參與度σ ,并設計相應的輔助策略算法實現兩種訓練模式的自適應調整。最后通過試驗證明了主動參與度σ 與表面肌電信號之間的相關性。并且,相較于僅通過交互力大小進行模式調整的控制策略,該方法具有更快的響應速度,使機器人在訓練過程中更具安全性。
引用本文: 李國寧, 陶亮, 孟京艷, 葉思佳, 馮光, 趙大正, 胡陽, 唐敏, 宋濤, 伏榮真, 左國坤, 張佳楫, 施長城. 基于交互力模糊識別的上肢康復機器人模式調整控制策略研究. 生物醫學工程學雜志, 2024, 41(1): 90-97. doi: 10.7507/1001-5515.202207018 復制
版權信息: ?四川大學華西醫院華西期刊社《生物醫學工程學雜志》版權所有,未經授權不得轉載、改編
0 引言
腦卒中是導致殘疾的主要原因之一[1],在這些幸存者中,大多數人會存在上肢運動功能障礙。目前已有的研究表明,這類患者通過大量重復的功能導向性運動訓練可以提高肌肉力量與運動協調性[2]。但是也有研究表明,持續的被動訓練療法在改善運動功能方面的效果有限。治療期間,患者的積極主動參與被認為是促進神經可塑性和運動恢復的關鍵因素之一[3-5]。
針對不同階段的上肢運動功能障礙患者,所對應的機器人輔助訓練方式亦有所不同,但大多數機器人輔助運動的控制策略都是基于患者的非功能側具有一定的運動能力之后制定的[6-8]。當患者處于軟癱期時,患者的非功能側運動能力較差,需要治療師或者康復機器人輔助進行重復的被動訓練[9-10]。這時如何實時檢測患者非功能側的運動能力,并在合適的情況下切入助動訓練模式或者主動訓練模式以最大程度激發患者的主動參與意圖,有待進一步的研究。
借助于力傳感器檢測患者與康復機器人的交互力信息以間接反映患者的運動意圖與運動能力是目前普遍使用的手段[11-13]。而對于從軟癱期到逐漸出現自主發力能力的患者來說,判斷此時患者是需要被動訓練還是可以進行助動訓練的策略往往僅依靠其力傳感器的值是否超過設定的閾值[14-15]。這種方法對于力傳感器的安裝位置與訓練軌跡有一定的要求,同時會因為不同使用者之間的特異性導致準確率不足。
基于以上討論,本研究針對處于早期偏癱的患者,設計了一種使用末端三維力傳感器實時評估患者訓練過程中主動參與度 (degree of active participation
(degree of active participation  )的上肢被動-助動訓練系統,并應用在實驗室自主研發的上肢末端康復機器人(end-effect upper limb rehabilitation robot,EULRR)上,探討該系統能否識別患者訓練過程中的主動參與程度,并據此選擇適合的訓練模式。
)的上肢被動-助動訓練系統,并應用在實驗室自主研發的上肢末端康復機器人(end-effect upper limb rehabilitation robot,EULRR)上,探討該系統能否識別患者訓練過程中的主動參與程度,并據此選擇適合的訓練模式。
1 模式切換策略研究
1.1 EULRR系統的特點介紹
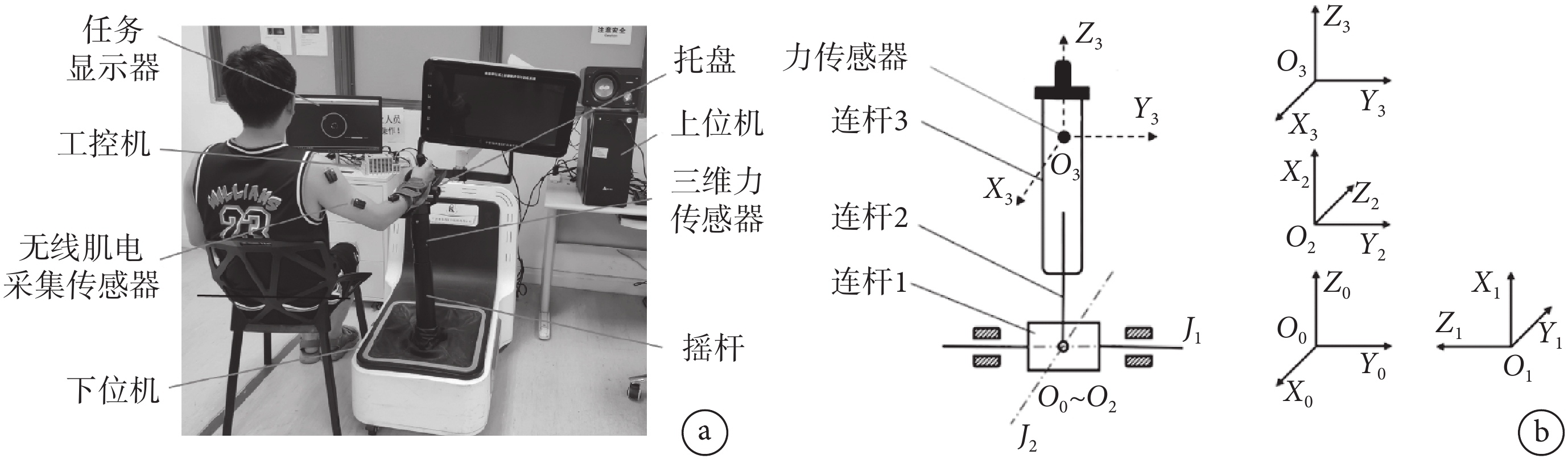
EULRR的機械結構如圖1a所示,該平臺主要由上位機和下位機兩部分組成。上位機為裝有控制軟件和Unity 3D軟件(Unity Technologies,美國)的臺式電腦;下位機由伺服控制系統及傳動機構組成,為整個訓練系統提供動力。該系統共有3個主動自由度,如圖1b所示,即搖桿沿X、Y軸分別由兩臺旋轉電機驅動,沿Z軸由一臺直線電機驅動;2個從動自由度,即托盤可以繞Z軸和Y軸轉動。三維力傳感器連接在托盤和搖桿末端之間,以測量受試者施加的力。
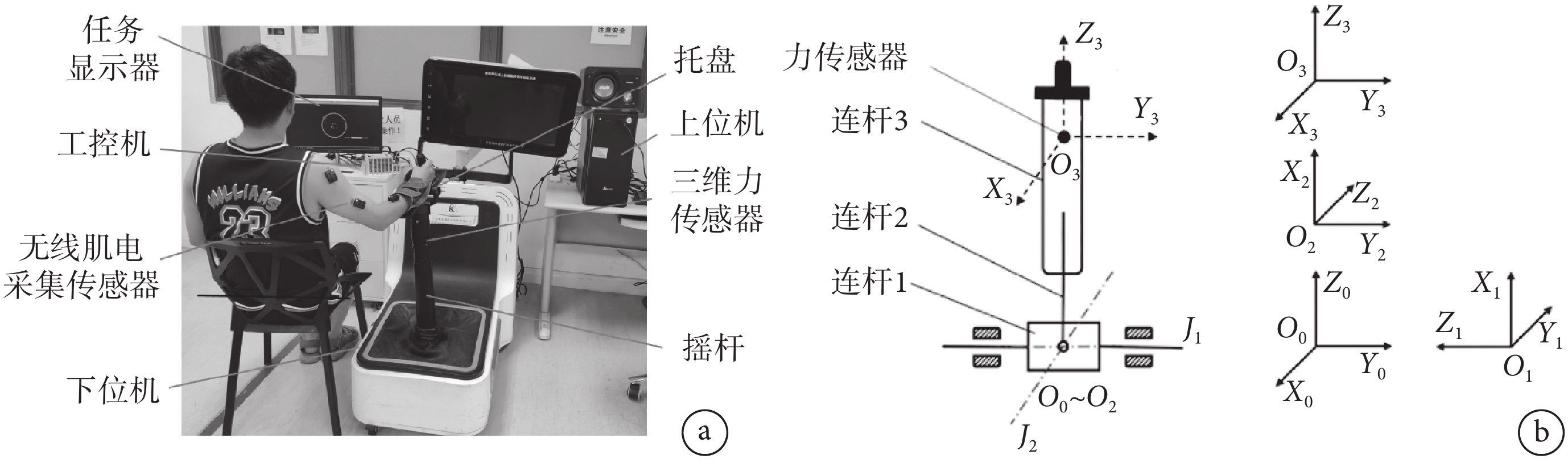
由于三維力傳感器安裝在搖桿的中上位置,在受試者與搖桿交互過程中,力傳感器數值主要由以下三部分構成:Ⅰ.力傳感器上方的搖桿部分與托盤的重力;Ⅱ.受試者的手臂重量;Ⅲ 受試者與機器人的交互力。
受試者與機器人的交互力。
在上述三部分中,有效的信息是第三部分;第二部分因為受試者的特異性,無法將其精確補償。同時,通過實驗發現,第一部分所占比重較大,可以通過運動學建模對它在不同位姿下對力傳感器的影響進行補償[16]。
1.2 被動訓練與助動訓練控制算法設計
對于軟癱期的上肢偏癱患者而言,因為其患側臂難以產生運動,此時康復訓練主要為以機器人為主導的被動訓練;對于逐漸出現自主發力能力的患者,其患側臂僅出現協同運動模式,此時患者患側的運動控制精度較低,在患側主動運動的同時,應當施以輔助力使末端運動軌跡盡可能沿著規劃軌跡,避免運動功能恢復過程中產生錯誤的代償運動行為[17]。
基于以上原因,本文設計了兩種訓練模式,一種是基于計算力矩控制器(computed torque controller)的被動訓練模式,一種是基于勢能場(potential field)的助動訓練模式。兩種模式的目標軌跡均為半徑 的圓。對于被動模式,電機的力矩輸出為[18]:
的圓。對于被動模式,電機的力矩輸出為[18]:
 |
詳細的動力學模型見Liu等[19]文章。式(4)中為 電機輸出力矩,
電機輸出力矩, 為期望軌跡,
為期望軌跡, 為電機的實際角度,
為電機的實際角度, ,
, 為系統的慣性矩陣,
為系統的慣性矩陣, 包含了依賴于狀態而非加速度的所有項,其中
包含了依賴于狀態而非加速度的所有項,其中  。此外通過軌跡規劃算法被動模式下可以實現從任意位置螺旋緩慢靠近規劃圓。
。此外通過軌跡規劃算法被動模式下可以實現從任意位置螺旋緩慢靠近規劃圓。
對于助動訓練,從設計的目標軌跡中均勻采樣取出 個點,用于構建勢能場的數據集:
個點,用于構建勢能場的數據集:
 |
式(2)中 分別表示機械臂末端在笛卡爾空間中的第i個點的位置、速度信息。P表示患側跟蹤軌跡數據集[20]。電機的輸出力矩為:
分別表示機械臂末端在笛卡爾空間中的第i個點的位置、速度信息。P表示患側跟蹤軌跡數據集[20]。電機的輸出力矩為:
 |
式(3)中, 為向心力和科里奧利矩陣,
為向心力和科里奧利矩陣, 為重力矩陣,
為重力矩陣, 為系統摩擦力矩,J 為雅可比矩陣,
為系統摩擦力矩,J 為雅可比矩陣, 指的是本文設計的勢能場的梯度,
指的是本文設計的勢能場的梯度, 表示阻尼力。采用勢能場的助動模式輔助策略為,在對EULRR完成重力和摩擦力補償之后,當患者帶動機械臂沿著目標軌跡運動時,機器臂不提供輔助力,而偏離目標軌跡之后,機械臂會提供一個糾偏力。因此目標軌跡上的點的勢能相較于全局最低,目標軌跡之外的點勢能隨著距離的增加而不斷增加。勢能場在目標軌跡上不產生輔助力,因此在勢能場的引導下機械臂在目標軌跡上可以自由運動,而在目標軌跡之外將會受到勢能場產生的糾偏力。又因為目標軌跡為一個封閉的曲線,所以在目標軌跡上的勢能處處相等。式(3)中關于
表示阻尼力。采用勢能場的助動模式輔助策略為,在對EULRR完成重力和摩擦力補償之后,當患者帶動機械臂沿著目標軌跡運動時,機器臂不提供輔助力,而偏離目標軌跡之后,機械臂會提供一個糾偏力。因此目標軌跡上的點的勢能相較于全局最低,目標軌跡之外的點勢能隨著距離的增加而不斷增加。勢能場在目標軌跡上不產生輔助力,因此在勢能場的引導下機械臂在目標軌跡上可以自由運動,而在目標軌跡之外將會受到勢能場產生的糾偏力。又因為目標軌跡為一個封閉的曲線,所以在目標軌跡上的勢能處處相等。式(3)中關于  、
、 的確定可參考文獻[21]。
的確定可參考文獻[21]。
1.3 模糊推理系統(fuzzy inference system,FIS)設計
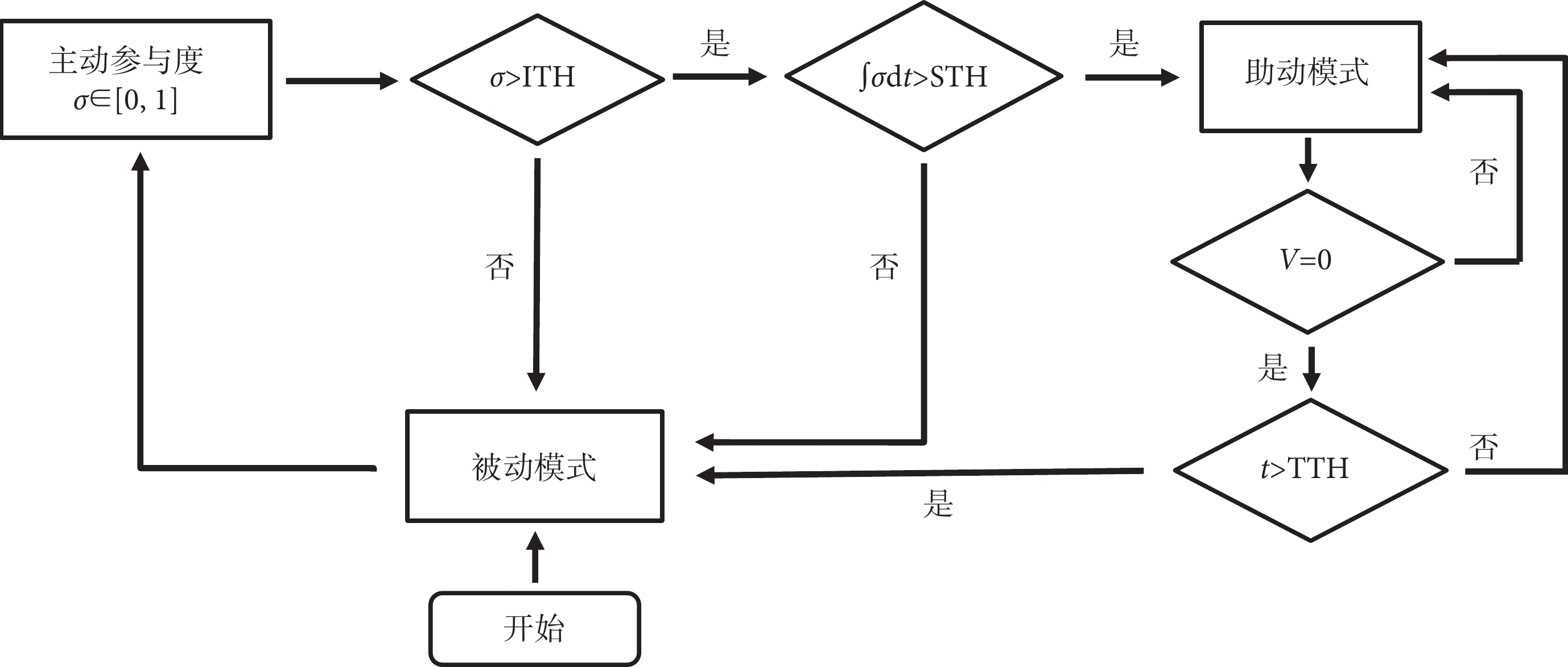
根據患者與EULRR系統的末端交互力信息判斷患者的主動參與度  ,并據此切換至對應的訓練模式是本文的研究重點。如圖2所示,EULRR初始為被動訓練模式,訓練過程中若受試者的主動參與度
,并據此切換至對應的訓練模式是本文的研究重點。如圖2所示,EULRR初始為被動訓練模式,訓練過程中若受試者的主動參與度  超過設定的初始閾值(the initial threshold,ITH),則對之進行時間上的積分,若積分超過累加閾值(the sum threshold,STH)則系統切換至助動訓練模式。在助動訓練過程中,若受試者與EULRR的交互力不足以使EULRR產生運動,即檢測到電機速度
超過設定的初始閾值(the initial threshold,ITH),則對之進行時間上的積分,若積分超過累加閾值(the sum threshold,STH)則系統切換至助動訓練模式。在助動訓練過程中,若受試者與EULRR的交互力不足以使EULRR產生運動,即檢測到電機速度 ,此時開始計時,若時間 t 超過時間閾值(the time threshold,TTH)則系統切換至被動訓練模式。該算法中ITH、STH、TTH皆可根據使用者的特異性進行調整。
,此時開始計時,若時間 t 超過時間閾值(the time threshold,TTH)則系統切換至被動訓練模式。該算法中ITH、STH、TTH皆可根據使用者的特異性進行調整。
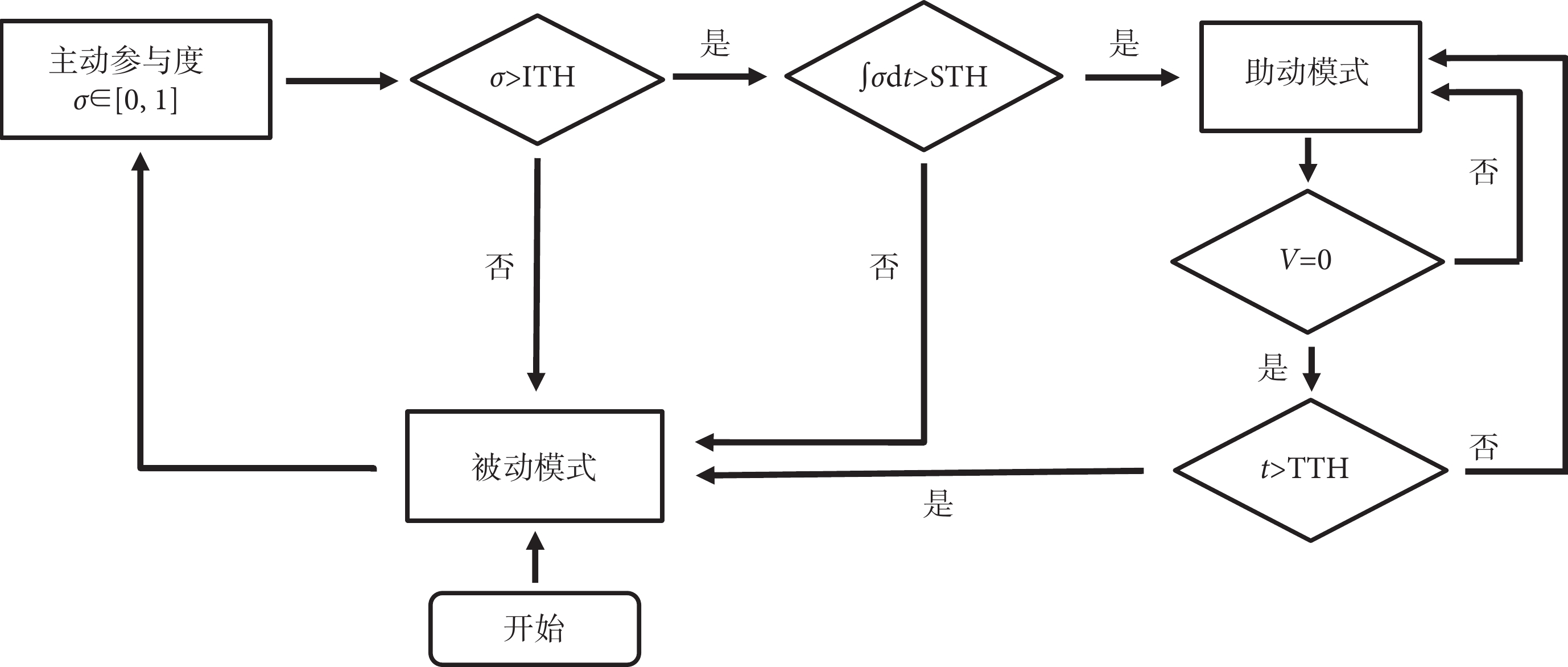 圖2
模式切換算法流程圖
Figure2.
Flow chart of switching algorithm
圖2
模式切換算法流程圖
Figure2.
Flow chart of switching algorithm
式(4)中 為傳感器采集到的實際交互力的合力,為了最大程度促進患者帶動機械臂訓練,這里的合力信息不區分方向。
為傳感器采集到的實際交互力的合力,為了最大程度促進患者帶動機械臂訓練,這里的合力信息不區分方向。
 |
式中, 為將力傳感器上方的搖桿部分與托盤的重力補償后的實際的交互力信息。將
為將力傳感器上方的搖桿部分與托盤的重力補償后的實際的交互力信息。將 與
與 作為FIS的輸入,后文記為
作為FIS的輸入,后文記為 與
與 。然后采集了以下三種狀態下的
。然后采集了以下三種狀態下的 與
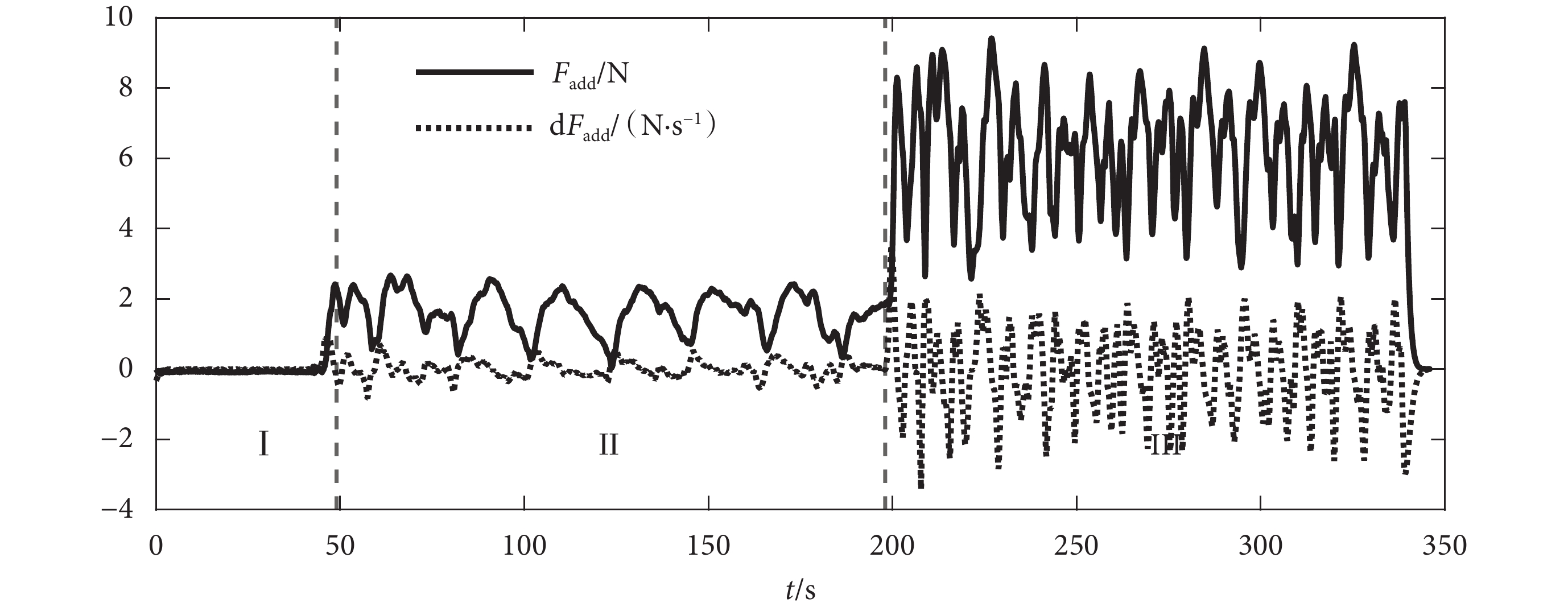
與 ,分別為:Ⅰ.被動模式下,EULRR無負載運動;Ⅱ.被動模式下,受試者手臂無發力;Ⅲ.助動模式下,勢能場勢能為0時,受試者手臂按任意軌跡運動。實驗結果如圖3所示。
,分別為:Ⅰ.被動模式下,EULRR無負載運動;Ⅱ.被動模式下,受試者手臂無發力;Ⅲ.助動模式下,勢能場勢能為0時,受試者手臂按任意軌跡運動。實驗結果如圖3所示。
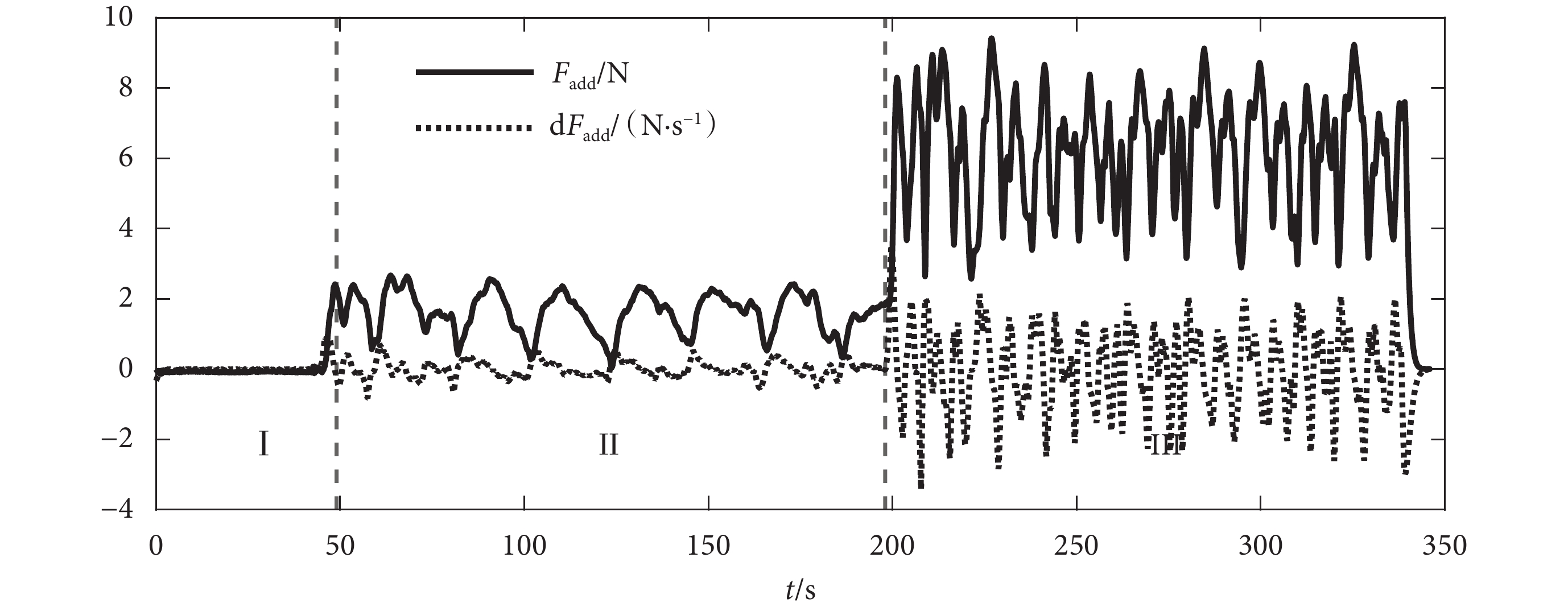 圖3
受試者S1右手在三種狀態下采集的F與dF的數據信息
Figure3.
Fadd and dFadd data were collected in the S1’s right hands under three conditions
圖3
受試者S1右手在三種狀態下采集的F與dF的數據信息
Figure3.
Fadd and dFadd data were collected in the S1’s right hands under three conditions
在狀態Ⅱ下, 與
與  仍然呈現一定的周期性運動,原因在于人的手臂類似于一個彈簧,在作伸展運動時會與EULRR產生一定周期性的交互力變化。此外在運動過程中,托盤會因為訓練過程中手臂的不同位姿而產生繞
仍然呈現一定的周期性運動,原因在于人的手臂類似于一個彈簧,在作伸展運動時會與EULRR產生一定周期性的交互力變化。此外在運動過程中,托盤會因為訓練過程中手臂的不同位姿而產生繞  坐標系Z軸與Y軸的姿態變化,這一變化會對力傳感器產生影響且無法預測。在狀態Ⅱ下,由于受試者沒有主動與EULRR產生交互力,相較于狀態Ⅲ,
坐標系Z軸與Y軸的姿態變化,這一變化會對力傳感器產生影響且無法預測。在狀態Ⅱ下,由于受試者沒有主動與EULRR產生交互力,相較于狀態Ⅲ, 變化范圍較小,也能更好地反映受試者在訓練過程中的主動參與度。這也是本文引入
變化范圍較小,也能更好地反映受試者在訓練過程中的主動參與度。這也是本文引入 這一指標并使用FIS的重要原因之一。
這一指標并使用FIS的重要原因之一。
通過實驗采集四位受試者左手和右手分別在三種狀態下的數據,并對狀態Ⅱ與狀態Ⅲ下的  取平均值,
取平均值, 取最大值與最小值。在被動模式下,
取最大值與最小值。在被動模式下, 的最大值為2.832 3 N,
的最大值為2.832 3 N, 的最大閉區間為[–1.3 N·s?1, 2.3 N·s?1];主動模式下,
的最大閉區間為[–1.3 N·s?1, 2.3 N·s?1];主動模式下, 的最大值為9.219 5 N,
的最大值為9.219 5 N, 的最大閉區間為[–6.1 N·s?1, 4.9 N·s?1]。綜上,制定FIS中輸入
的最大閉區間為[–6.1 N·s?1, 4.9 N·s?1]。綜上,制定FIS中輸入  、
、 與輸出主動參與度
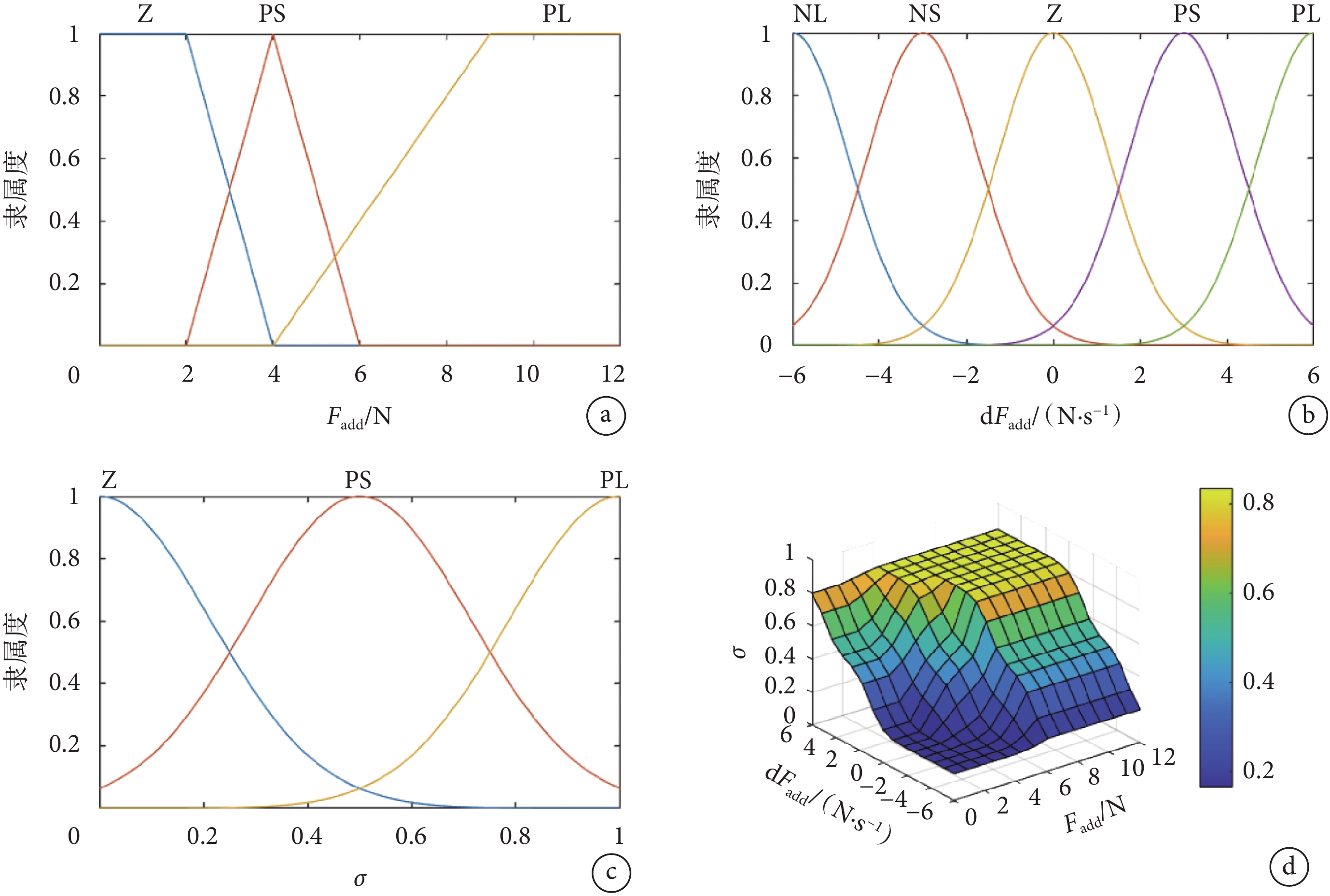
與輸出主動參與度  的隸屬度函數,如圖4所示,圖中NL、NS、Z、PS、PL為模糊算法中常用的語言值,依次分別代表負大、負小、零、正小、正大。
的隸屬度函數,如圖4所示,圖中NL、NS、Z、PS、PL為模糊算法中常用的語言值,依次分別代表負大、負小、零、正小、正大。
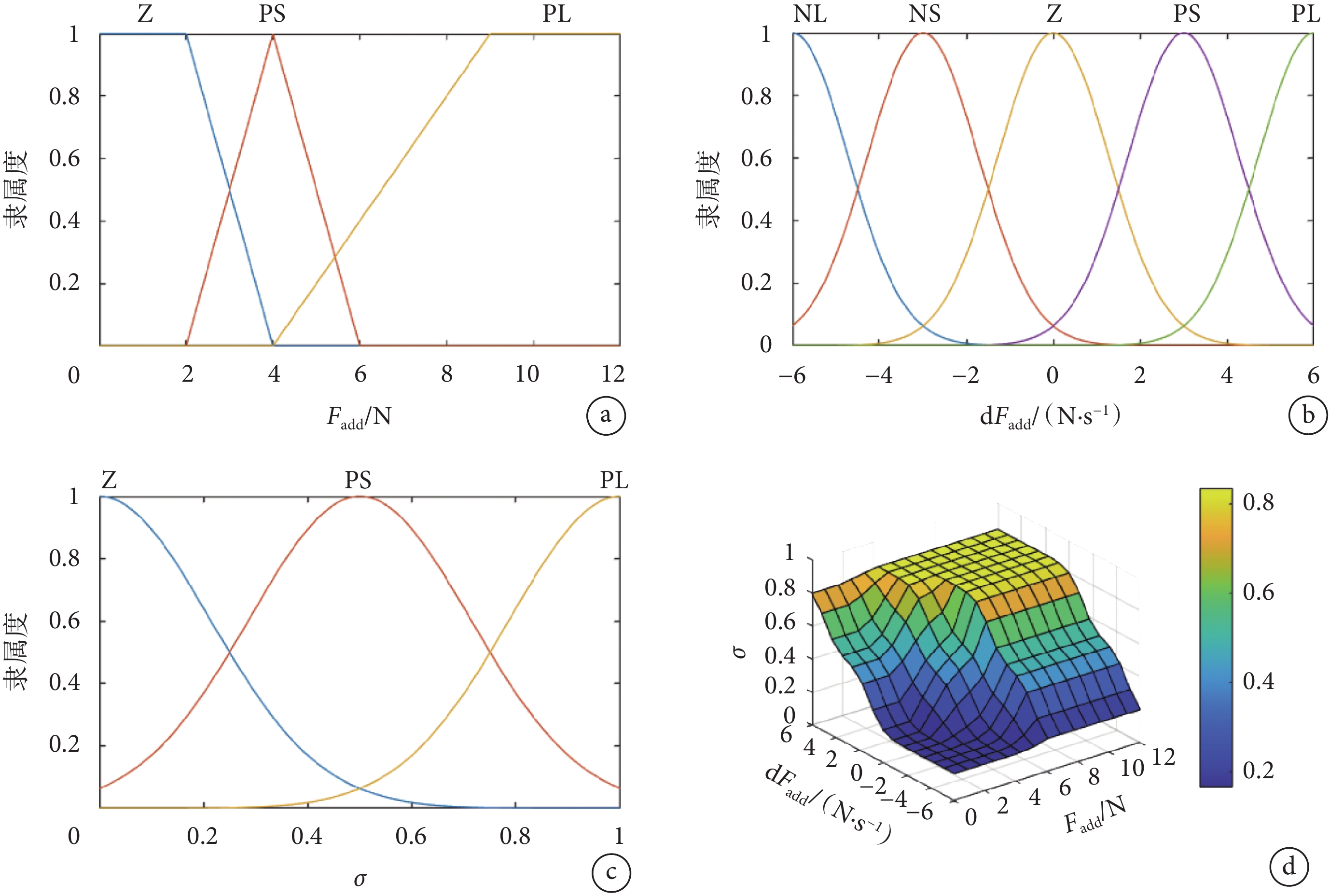 圖4
輸入輸出隸屬度函數及關系曲面圖
圖4
輸入輸出隸屬度函數及關系曲面圖
a. 的隸屬度函數;b. 的隸屬度函數;c. 主動參與度的隸屬度函數;d. 主動參與度與及的關系 (彩圖)
Figure4. Input and output membership function and relational surface diagrama. membership function of ; b. membership function of ; c. membership function of active participation ; d. relationship between active participation , and
模糊規則庫是FIS的核心要素,也是設計者的知識和經驗被正確解釋及組成恰當規則集的樞紐。本研究與康復醫師討論之后,在患者能力滿足的情況下,以盡可能使患者進行助動訓練為目標,設計了如表1所示的規則表。根據 與
與 的輸入,采用“IF···and···THEN···”規則進行主動參與度
的輸入,采用“IF···and···THEN···”規則進行主動參與度 的判斷。
的判斷。
本文采用乘積蘊涵,表1中的激活規則結論部分相同,為了防止只有最大隸屬函數的那條規則對精確輸出值有貢獻,忽略較低隸屬函數的規則,導致較大的權重分配給不重要的規則,這里采用總和重心解模糊方法[22]。圖4中的曲面圖顯示了由模糊規則定義的推理系統輸入和輸出之間的關系,可以看出隨著 與
與 的增大,主動參與度
的增大,主動參與度 也是遞增的。
也是遞增的。
根據實時主動參與度 的變化設計被動訓練與助動訓練之間的切換策略,同時考慮到患者持續發力的能力,設計如下切換策略:
的變化設計被動訓練與助動訓練之間的切換策略,同時考慮到患者持續發力的能力,設計如下切換策略:
 |
 |
式(5)中  與式(6)中
與式(6)中  可以由康復醫師來調節以控制訓練的難易程度。
可以由康復醫師來調節以控制訓練的難易程度。
2 試驗驗證
2.1 試驗方案
試驗用于驗證:① 被動和助動訓練模式下,受試者的主動參與度 與其肌肉激發狀態的關系;② 主動參與度
與其肌肉激發狀態的關系;② 主動參與度 在切換速度上相較于使用末端交互力作為切換指標的區別。
在切換速度上相較于使用末端交互力作為切換指標的區別。
本文試驗所招募12名受試者均為右利手,其中9名男性,3名女性,年齡24~27。所有受試者身體健康,無外周血管、心血管疾病。試驗于中國科學院寧波材料技術與工程研究所康復機器人實驗室進行,受試者均簽署知情同意書。
受試者首先在不主動發力的狀態下進行被動畫圓任務,此時EULRR末端位置的代理點在人機交互界面為綠色。當代理點顏色變為紅色之后,提示受試者發力將EULRR的訓練模式切換至助動訓練模式。切換成功后,受試者主動發力控制EULRR沿著目標軌跡進行畫圓運動。訓練過程中當代理點顏色變為綠色之后,受試者不再主動發力,而EULRR停止運動超過設定閾值 后則切換至被動訓練。以此重復訓練10組。試驗中代理點顏色改變的時間間隔為30~40 s之間的隨機時間,
后則切換至被動訓練。以此重復訓練10組。試驗中代理點顏色改變的時間間隔為30~40 s之間的隨機時間, ,
, ,
, 。如圖1a所示,試驗中全程采集受試者訓練側手臂的表面肌電信號(surface electromyography signal,sEMG)。主動參與度
。如圖1a所示,試驗中全程采集受試者訓練側手臂的表面肌電信號(surface electromyography signal,sEMG)。主動參與度 與模式標志位(Flag)利用機器人控制軟件進行采集,采樣頻率為1 000 Hz;肌電數據采用Trigno Wireless System設備(Delsys Inc.,美國)進行采集,采樣頻率為2 000 Hz。
與模式標志位(Flag)利用機器人控制軟件進行采集,采樣頻率為1 000 Hz;肌電數據采用Trigno Wireless System設備(Delsys Inc.,美國)進行采集,采樣頻率為2 000 Hz。
2.2 試驗結果
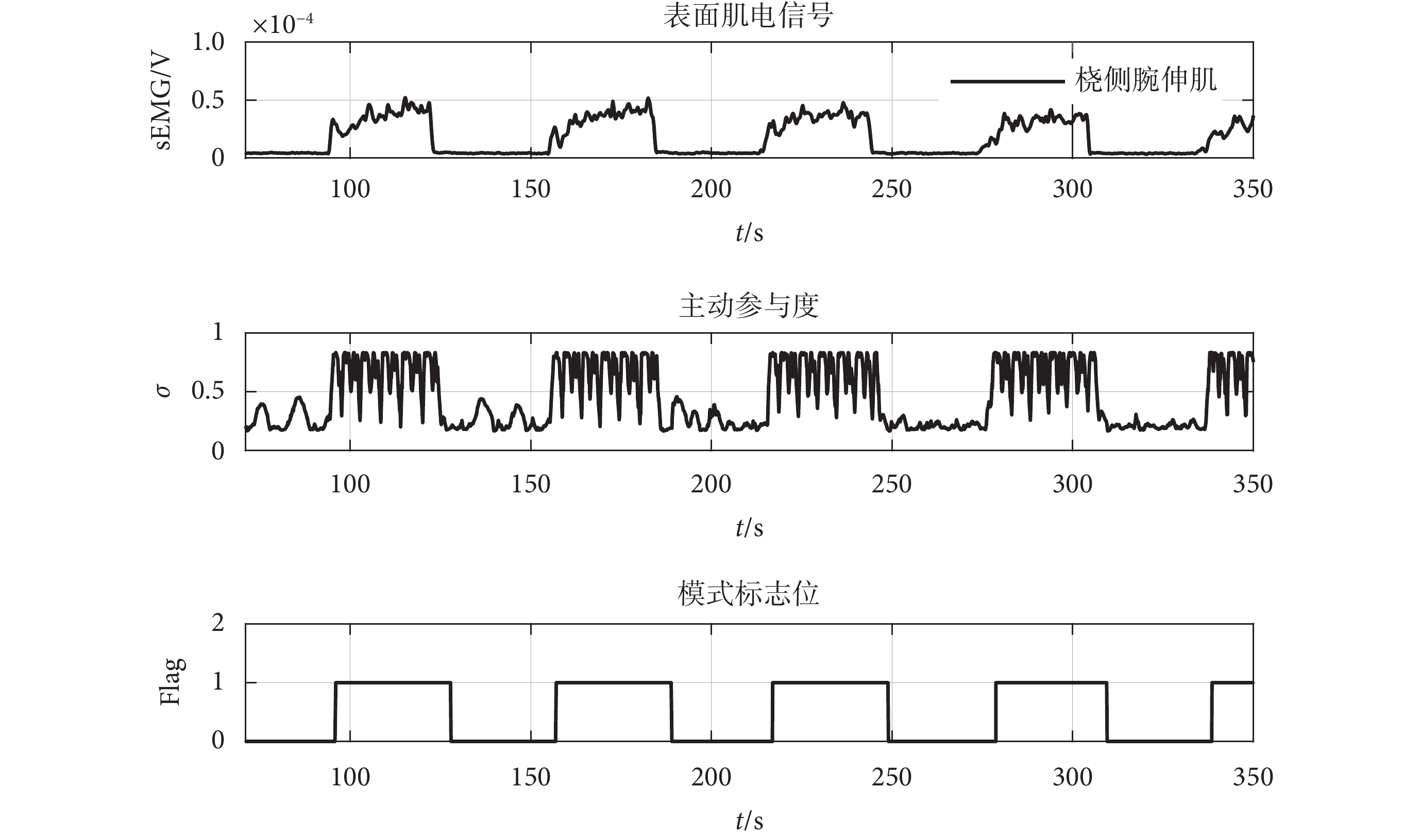
試驗中采集了訓練側手臂的橈側腕伸肌、肱三頭肌、橈側腕屈肌及三角肌后束的sEMG。圖5為代表性受試者(受試者編號為S1)的橈側腕伸肌sEMG與主動參與度  同步數據獲取的曲線圖(僅顯示4組訓練數據),其中原始肌電信號進行了降采樣、去均值、濾波、整流、取包絡線處理,模式標志位
同步數據獲取的曲線圖(僅顯示4組訓練數據),其中原始肌電信號進行了降采樣、去均值、濾波、整流、取包絡線處理,模式標志位  表示EULRR處于被動訓練模式,
表示EULRR處于被動訓練模式, 表示EULRR處于助動訓練模式。
表示EULRR處于助動訓練模式。
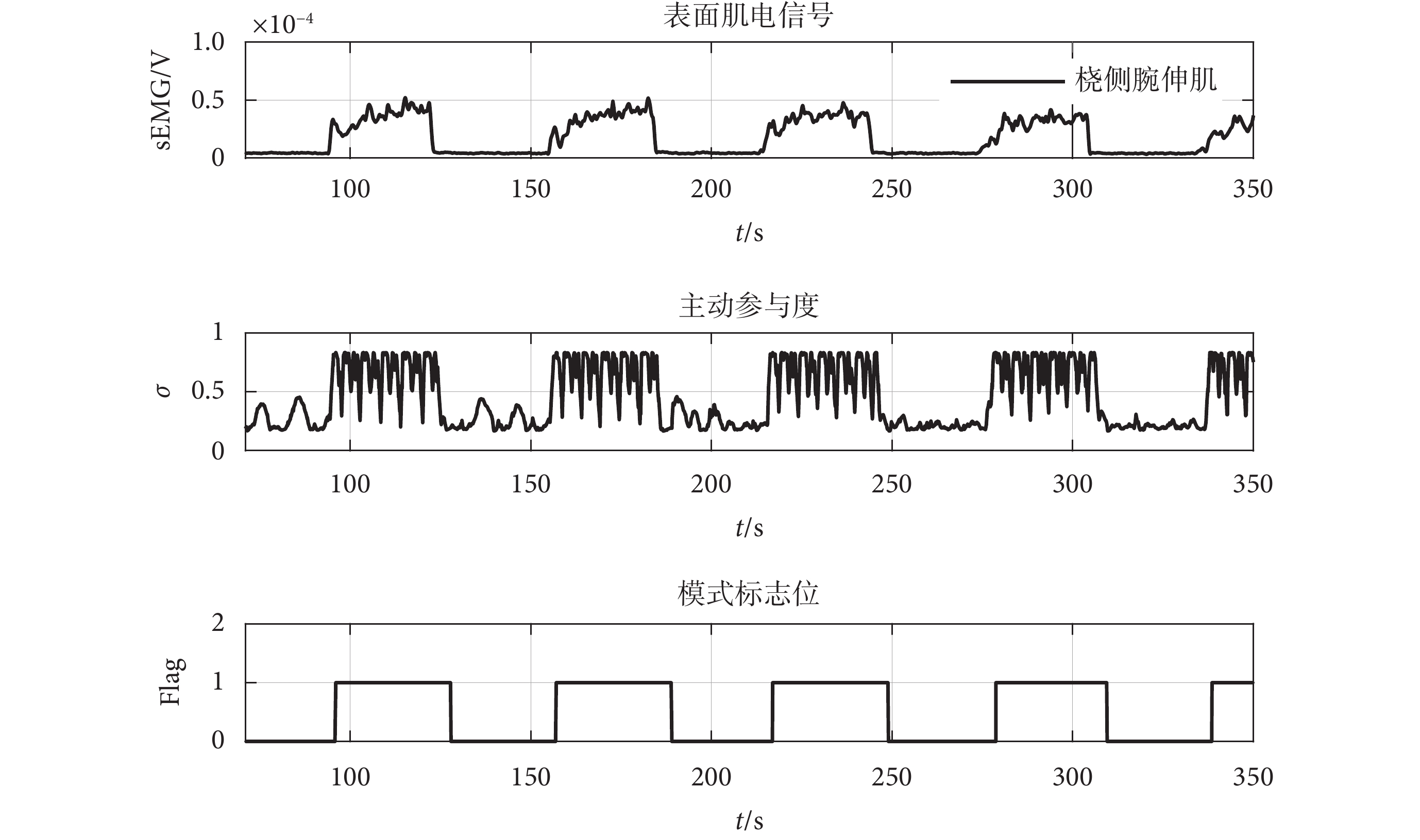 圖5
主動參與度與表面肌電的實時關系圖
Figure5.
Real-time curves of the degree of active participation and sEMG signals
圖5
主動參與度與表面肌電的實時關系圖
Figure5.
Real-time curves of the degree of active participation and sEMG signals
sEMG作為肌肉激活程度的有效衡量指標已經被廣泛證實[23-24],為了驗證本文提出的主動參與度 可以有效反映受試者的發力狀態,訓練中實時采集被動模式與助動模式下的sEMG與主動參與度
可以有效反映受試者的發力狀態,訓練中實時采集被動模式與助動模式下的sEMG與主動參與度 ,并求取均值,然后依次求取每個受試者各區域的sEMG與其主動參與度
,并求取均值,然后依次求取每個受試者各區域的sEMG與其主動參與度 的Spearman相關系數,如表2所示。分析結果顯示sEMG與
的Spearman相關系數,如表2所示。分析結果顯示sEMG與 在被動模式與助動模式下的平均相關系數為0.745 6與0.892 0,且均具有統計學意義(P < 0.001),表明兩者關系非常緊密,主動參與度
在被動模式與助動模式下的平均相關系數為0.745 6與0.892 0,且均具有統計學意義(P < 0.001),表明兩者關系非常緊密,主動參與度 可以作為評估受試者不同訓練模式下發力狀態的指標。
可以作為評估受試者不同訓練模式下發力狀態的指標。
 均值、95%CI以及與sEMG的相關系數(n = 12)
Table2.
The mean of
均值、95%CI以及與sEMG的相關系數(n = 12)
Table2.
The mean of  , 95%CI and correlation coefficient with sEMG for both models (n = 12)
, 95%CI and correlation coefficient with sEMG for both models (n = 12)
對于腦卒中偏癱患者而言,在被動訓練過程中,當患者肌張力異常增大產生痙攣時,為了患者的安全必須立刻停止被動訓練。本文提出的切換策略則可以通過檢測患者因痙攣抵抗被動訓練而產生的較大的  進而切換至助動訓練模式,保障了安全性。此外本研究FIS引入了
進而切換至助動訓練模式,保障了安全性。此外本研究FIS引入了  ,相較于傳統方法只通過單一信息
,相較于傳統方法只通過單一信息  進行不同模式的切換與受試者運動意圖的識別[15],前者的切換策略響應速度要快于后者。試驗中可以通過調整ITH、STH的值來調整被動模式切換至助動模式的難度。經驗性地,本次試驗中統一取
進行不同模式的切換與受試者運動意圖的識別[15],前者的切換策略響應速度要快于后者。試驗中可以通過調整ITH、STH的值來調整被動模式切換至助動模式的難度。經驗性地,本次試驗中統一取  ,
, ,
, ,其中
,其中  為同一受試者在助動模式下的
為同一受試者在助動模式下的 均值。通過人機交互界面,當代理點由綠色變為紅色之后,受試者開始主動發力。為了便于觀察,當代理點為綠色時
均值。通過人機交互界面,當代理點由綠色變為紅色之后,受試者開始主動發力。為了便于觀察,當代理點為綠色時  ,當代理點為紅色時
,當代理點為紅色時  ,被動模式下
,被動模式下  ,助動模式下
,助動模式下  。
。
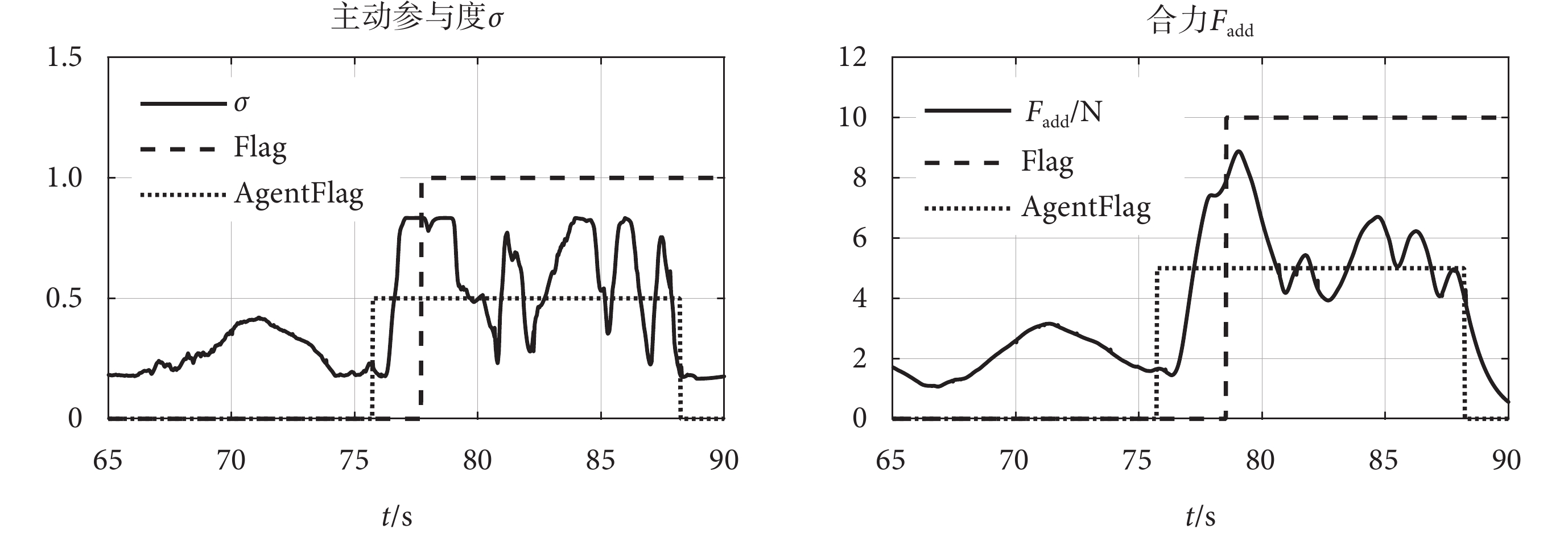
如圖6所示,同一受試者在同一切換策略但不同評估指標  與
與  下,從被動模式切換至助動模式的響應時間,前者比后者用時縮短(1.18 ± 0.64)s(
下,從被動模式切換至助動模式的響應時間,前者比后者用時縮短(1.18 ± 0.64)s( ;
; )。如表3所示,使五名受試者完成十組隨機切換試驗,試驗中分別將本文方法的主動參與度
)。如表3所示,使五名受試者完成十組隨機切換試驗,試驗中分別將本文方法的主動參與度  與傳統方法的
與傳統方法的  作為切換策略的輸入,對比兩者模式切換的響應時間,本文方法具有明顯的優勢。
作為切換策略的輸入,對比兩者模式切換的響應時間,本文方法具有明顯的優勢。
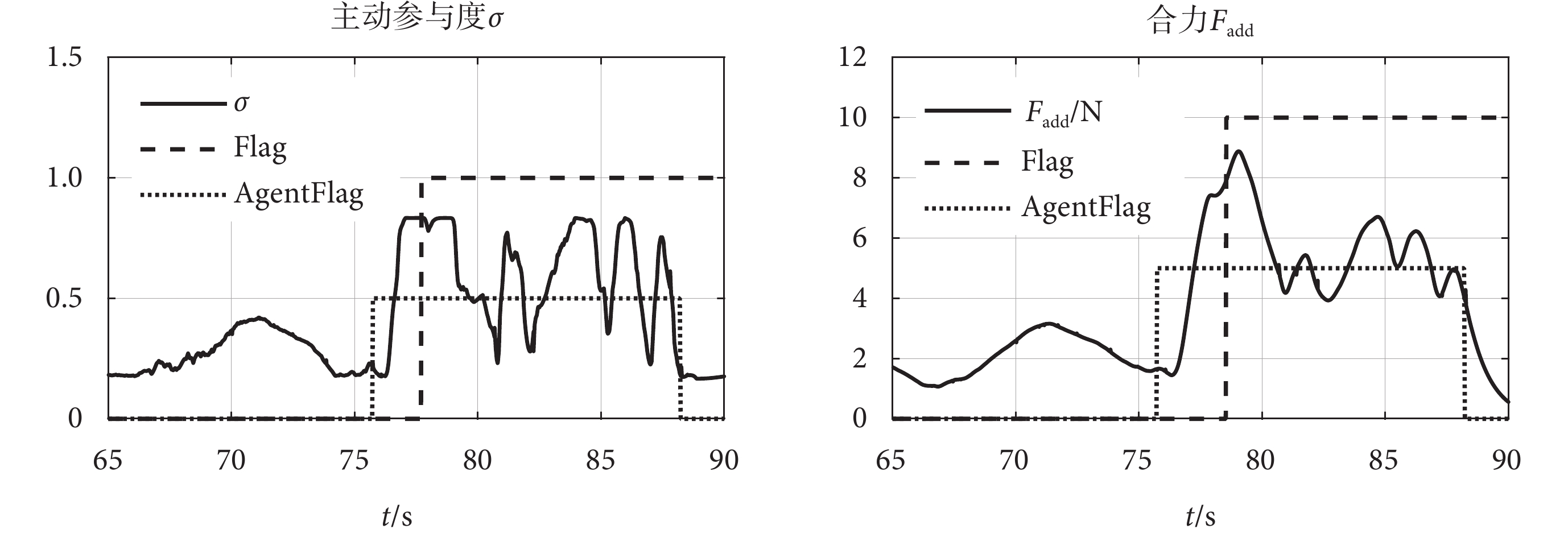 圖6
切換響應時間對比
Figure6.
Comparison of response times for mode switching
圖6
切換響應時間對比
Figure6.
Comparison of response times for mode switching
3 討論與結論
對于運動功能障礙患者而言,過高或過低的訓練難度都會影響其訓練效果,康復治療師需依據評估結果為不同康復狀態的患者定制任務難度。相比于經典的方法,本文設計的切換策略可以通過調節ITH控制患者進入助動訓練需要的力度,通過調節STH控制患者進入助動訓練需要持續發力的時間,以及通過調節TTH控制因患者短時間能力不足無法繼續進行助動訓練而進入被動訓練的時間,提升了康復訓練的定制化程度。
本文的創新點如下:① 提出了一種新的評估方法,將患者與機器人的交互力及力的變化速率引入FIS,得到了一個新的評價指標——主動參與度  ,并以此選擇合適訓練模式。② 模式切換算法具有多個可調參數,以適應不同使用者的個性化需求。但是,盡管本文所提出的方法可以較好地實現兩種模式的切換,仍然需要開展進一步的研究。首先,本文提出的主動參與度
,并以此選擇合適訓練模式。② 模式切換算法具有多個可調參數,以適應不同使用者的個性化需求。但是,盡管本文所提出的方法可以較好地實現兩種模式的切換,仍然需要開展進一步的研究。首先,本文提出的主動參與度  在[0, 1]之間變動,當患者的發力水平超過一定閾值之后,主動參與度
在[0, 1]之間變動,當患者的發力水平超過一定閾值之后,主動參與度  無法定量反映其更高水平的發力狀態,不利于后續康復醫師精確了解患者的康復狀態。其次本文中的受試者都是健康人群,缺乏足夠的患者訓練數據來對切換策略中的ITH、STH、TTH提供合理的參考設置。因此,后續研究將采集相應的上肢運動功能障礙患者的訓練數據,并依據患者的訓練感受調整模糊推理算法。
無法定量反映其更高水平的發力狀態,不利于后續康復醫師精確了解患者的康復狀態。其次本文中的受試者都是健康人群,缺乏足夠的患者訓練數據來對切換策略中的ITH、STH、TTH提供合理的參考設置。因此,后續研究將采集相應的上肢運動功能障礙患者的訓練數據,并依據患者的訓練感受調整模糊推理算法。
重要聲明
利益沖突聲明:本文全體作者均聲明不存在利益沖突。
作者貢獻聲明:概念:施長城、張佳楫;方法:李國寧、陶亮;軟件:李國寧、孟京艷、葉思佳;實驗設計:李國寧、施長城;數據收集:李國寧、胡陽;數據分析:李國寧、馮光;調查:趙大正、唐敏;資源:左國坤、施長城、宋濤、伏榮真;寫作-初稿準備:李國寧、施長城;寫作評論和編輯:施長城、左國坤;可視化與監督:施長城、張佳楫;項目管理:施長城、左國坤;所有作者均已閱讀并同意稿件的出版版本。
倫理聲明:本研究通過了中國科學院寧波材料技術與工程研究所生物倫理委員會的審批。
0 引言
腦卒中是導致殘疾的主要原因之一[1],在這些幸存者中,大多數人會存在上肢運動功能障礙。目前已有的研究表明,這類患者通過大量重復的功能導向性運動訓練可以提高肌肉力量與運動協調性[2]。但是也有研究表明,持續的被動訓練療法在改善運動功能方面的效果有限。治療期間,患者的積極主動參與被認為是促進神經可塑性和運動恢復的關鍵因素之一[3-5]。
針對不同階段的上肢運動功能障礙患者,所對應的機器人輔助訓練方式亦有所不同,但大多數機器人輔助運動的控制策略都是基于患者的非功能側具有一定的運動能力之后制定的[6-8]。當患者處于軟癱期時,患者的非功能側運動能力較差,需要治療師或者康復機器人輔助進行重復的被動訓練[9-10]。這時如何實時檢測患者非功能側的運動能力,并在合適的情況下切入助動訓練模式或者主動訓練模式以最大程度激發患者的主動參與意圖,有待進一步的研究。
借助于力傳感器檢測患者與康復機器人的交互力信息以間接反映患者的運動意圖與運動能力是目前普遍使用的手段[11-13]。而對于從軟癱期到逐漸出現自主發力能力的患者來說,判斷此時患者是需要被動訓練還是可以進行助動訓練的策略往往僅依靠其力傳感器的值是否超過設定的閾值[14-15]。這種方法對于力傳感器的安裝位置與訓練軌跡有一定的要求,同時會因為不同使用者之間的特異性導致準確率不足。
基于以上討論,本研究針對處于早期偏癱的患者,設計了一種使用末端三維力傳感器實時評估患者訓練過程中主動參與度(degree of active participation )的上肢被動-助動訓練系統,并應用在實驗室自主研發的上肢末端康復機器人(end-effect upper limb rehabilitation robot,EULRR)上,探討該系統能否識別患者訓練過程中的主動參與程度,并據此選擇適合的訓練模式。
1 模式切換策略研究
1.1 EULRR系統的特點介紹
EULRR的機械結構如圖1a所示,該平臺主要由上位機和下位機兩部分組成。上位機為裝有控制軟件和Unity 3D軟件(Unity Technologies,美國)的臺式電腦;下位機由伺服控制系統及傳動機構組成,為整個訓練系統提供動力。該系統共有3個主動自由度,如圖1b所示,即搖桿沿X、Y軸分別由兩臺旋轉電機驅動,沿Z軸由一臺直線電機驅動;2個從動自由度,即托盤可以繞Z軸和Y軸轉動。三維力傳感器連接在托盤和搖桿末端之間,以測量受試者施加的力。
由于三維力傳感器安裝在搖桿的中上位置,在受試者與搖桿交互過程中,力傳感器數值主要由以下三部分構成:Ⅰ.力傳感器上方的搖桿部分與托盤的重力;Ⅱ.受試者的手臂重量;Ⅲ受試者與機器人的交互力。
在上述三部分中,有效的信息是第三部分;第二部分因為受試者的特異性,無法將其精確補償。同時,通過實驗發現,第一部分所占比重較大,可以通過運動學建模對它在不同位姿下對力傳感器的影響進行補償[16]。
1.2 被動訓練與助動訓練控制算法設計
對于軟癱期的上肢偏癱患者而言,因為其患側臂難以產生運動,此時康復訓練主要為以機器人為主導的被動訓練;對于逐漸出現自主發力能力的患者,其患側臂僅出現協同運動模式,此時患者患側的運動控制精度較低,在患側主動運動的同時,應當施以輔助力使末端運動軌跡盡可能沿著規劃軌跡,避免運動功能恢復過程中產生錯誤的代償運動行為[17]。
基于以上原因,本文設計了兩種訓練模式,一種是基于計算力矩控制器(computed torque controller)的被動訓練模式,一種是基于勢能場(potential field)的助動訓練模式。兩種模式的目標軌跡均為半徑的圓。對于被動模式,電機的力矩輸出為[18]:
|
詳細的動力學模型見Liu等[19]文章。式(4)中為 電機輸出力矩, 為期望軌跡, 為電機的實際角度,, 為系統的慣性矩陣, 包含了依賴于狀態而非加速度的所有項,其中 。此外通過軌跡規劃算法被動模式下可以實現從任意位置螺旋緩慢靠近規劃圓。
對于助動訓練,從設計的目標軌跡中均勻采樣取出個點,用于構建勢能場的數據集:
|
式(2)中 分別表示機械臂末端在笛卡爾空間中的第i個點的位置、速度信息。P表示患側跟蹤軌跡數據集[20]。電機的輸出力矩為:
|
式(3)中, 為向心力和科里奧利矩陣, 為重力矩陣, 為系統摩擦力矩,J 為雅可比矩陣, 指的是本文設計的勢能場的梯度, 表示阻尼力。采用勢能場的助動模式輔助策略為,在對EULRR完成重力和摩擦力補償之后,當患者帶動機械臂沿著目標軌跡運動時,機器臂不提供輔助力,而偏離目標軌跡之后,機械臂會提供一個糾偏力。因此目標軌跡上的點的勢能相較于全局最低,目標軌跡之外的點勢能隨著距離的增加而不斷增加。勢能場在目標軌跡上不產生輔助力,因此在勢能場的引導下機械臂在目標軌跡上可以自由運動,而在目標軌跡之外將會受到勢能場產生的糾偏力。又因為目標軌跡為一個封閉的曲線,所以在目標軌跡上的勢能處處相等。式(3)中關于 、 的確定可參考文獻[21]。
1.3 模糊推理系統(fuzzy inference system,FIS)設計
根據患者與EULRR系統的末端交互力信息判斷患者的主動參與度 ,并據此切換至對應的訓練模式是本文的研究重點。如圖2所示,EULRR初始為被動訓練模式,訓練過程中若受試者的主動參與度 超過設定的初始閾值(the initial threshold,ITH),則對之進行時間上的積分,若積分超過累加閾值(the sum threshold,STH)則系統切換至助動訓練模式。在助動訓練過程中,若受試者與EULRR的交互力不足以使EULRR產生運動,即檢測到電機速度,此時開始計時,若時間 t 超過時間閾值(the time threshold,TTH)則系統切換至被動訓練模式。該算法中ITH、STH、TTH皆可根據使用者的特異性進行調整。
圖2
模式切換算法流程圖
Figure2.
Flow chart of switching algorithm
式(4)中為傳感器采集到的實際交互力的合力,為了最大程度促進患者帶動機械臂訓練,這里的合力信息不區分方向。
|
式中,為將力傳感器上方的搖桿部分與托盤的重力補償后的實際的交互力信息。將與作為FIS的輸入,后文記為與。然后采集了以下三種狀態下的與,分別為:Ⅰ.被動模式下,EULRR無負載運動;Ⅱ.被動模式下,受試者手臂無發力;Ⅲ.助動模式下,勢能場勢能為0時,受試者手臂按任意軌跡運動。實驗結果如圖3所示。
圖3
受試者S1右手在三種狀態下采集的F與dF的數據信息
Figure3.
Fadd and dFadd data were collected in the S1’s right hands under three conditions
在狀態Ⅱ下, 與 仍然呈現一定的周期性運動,原因在于人的手臂類似于一個彈簧,在作伸展運動時會與EULRR產生一定周期性的交互力變化。此外在運動過程中,托盤會因為訓練過程中手臂的不同位姿而產生繞 坐標系Z軸與Y軸的姿態變化,這一變化會對力傳感器產生影響且無法預測。在狀態Ⅱ下,由于受試者沒有主動與EULRR產生交互力,相較于狀態Ⅲ, 變化范圍較小,也能更好地反映受試者在訓練過程中的主動參與度。這也是本文引入這一指標并使用FIS的重要原因之一。
通過實驗采集四位受試者左手和右手分別在三種狀態下的數據,并對狀態Ⅱ與狀態Ⅲ下的 取平均值, 取最大值與最小值。在被動模式下, 的最大值為2.832 3 N, 的最大閉區間為[–1.3 N·s?1, 2.3 N·s?1];主動模式下, 的最大值為9.219 5 N,的最大閉區間為[–6.1 N·s?1, 4.9 N·s?1]。綜上,制定FIS中輸入 、 與輸出主動參與度 的隸屬度函數,如圖4所示,圖中NL、NS、Z、PS、PL為模糊算法中常用的語言值,依次分別代表負大、負小、零、正小、正大。
圖4
輸入輸出隸屬度函數及關系曲面圖
a. 的隸屬度函數;b. 的隸屬度函數;c. 主動參與度的隸屬度函數;d. 主動參與度與及的關系 (彩圖)
Figure4. Input and output membership function and relational surface diagrama. membership function of ; b. membership function of ; c. membership function of active participation ; d. relationship between active participation , and
模糊規則庫是FIS的核心要素,也是設計者的知識和經驗被正確解釋及組成恰當規則集的樞紐。本研究與康復醫師討論之后,在患者能力滿足的情況下,以盡可能使患者進行助動訓練為目標,設計了如表1所示的規則表。根據與的輸入,采用“IF···and···THEN···”規則進行主動參與度的判斷。
本文采用乘積蘊涵,表1中的激活規則結論部分相同,為了防止只有最大隸屬函數的那條規則對精確輸出值有貢獻,忽略較低隸屬函數的規則,導致較大的權重分配給不重要的規則,這里采用總和重心解模糊方法[22]。圖4中的曲面圖顯示了由模糊規則定義的推理系統輸入和輸出之間的關系,可以看出隨著與的增大,主動參與度也是遞增的。
根據實時主動參與度的變化設計被動訓練與助動訓練之間的切換策略,同時考慮到患者持續發力的能力,設計如下切換策略:
|
|
式(5)中 與式(6)中 可以由康復醫師來調節以控制訓練的難易程度。
2 試驗驗證
2.1 試驗方案
試驗用于驗證:① 被動和助動訓練模式下,受試者的主動參與度與其肌肉激發狀態的關系;② 主動參與度在切換速度上相較于使用末端交互力作為切換指標的區別。
本文試驗所招募12名受試者均為右利手,其中9名男性,3名女性,年齡24~27。所有受試者身體健康,無外周血管、心血管疾病。試驗于中國科學院寧波材料技術與工程研究所康復機器人實驗室進行,受試者均簽署知情同意書。
受試者首先在不主動發力的狀態下進行被動畫圓任務,此時EULRR末端位置的代理點在人機交互界面為綠色。當代理點顏色變為紅色之后,提示受試者發力將EULRR的訓練模式切換至助動訓練模式。切換成功后,受試者主動發力控制EULRR沿著目標軌跡進行畫圓運動。訓練過程中當代理點顏色變為綠色之后,受試者不再主動發力,而EULRR停止運動超過設定閾值后則切換至被動訓練。以此重復訓練10組。試驗中代理點顏色改變的時間間隔為30~40 s之間的隨機時間,,,。如圖1a所示,試驗中全程采集受試者訓練側手臂的表面肌電信號(surface electromyography signal,sEMG)。主動參與度與模式標志位(Flag)利用機器人控制軟件進行采集,采樣頻率為1 000 Hz;肌電數據采用Trigno Wireless System設備(Delsys Inc.,美國)進行采集,采樣頻率為2 000 Hz。
2.2 試驗結果
試驗中采集了訓練側手臂的橈側腕伸肌、肱三頭肌、橈側腕屈肌及三角肌后束的sEMG。圖5為代表性受試者(受試者編號為S1)的橈側腕伸肌sEMG與主動參與度 同步數據獲取的曲線圖(僅顯示4組訓練數據),其中原始肌電信號進行了降采樣、去均值、濾波、整流、取包絡線處理,模式標志位 表示EULRR處于被動訓練模式, 表示EULRR處于助動訓練模式。
圖5
主動參與度與表面肌電的實時關系圖
Figure5.
Real-time curves of the degree of active participation and sEMG signals
sEMG作為肌肉激活程度的有效衡量指標已經被廣泛證實[23-24],為了驗證本文提出的主動參與度可以有效反映受試者的發力狀態,訓練中實時采集被動模式與助動模式下的sEMG與主動參與度,并求取均值,然后依次求取每個受試者各區域的sEMG與其主動參與度的Spearman相關系數,如表2所示。分析結果顯示sEMG與在被動模式與助動模式下的平均相關系數為0.745 6與0.892 0,且均具有統計學意義(P < 0.001),表明兩者關系非常緊密,主動參與度可以作為評估受試者不同訓練模式下發力狀態的指標。
均值、95%CI以及與sEMG的相關系數(n = 12)
Table2.
The mean of , 95%CI and correlation coefficient with sEMG for both models (n = 12)
對于腦卒中偏癱患者而言,在被動訓練過程中,當患者肌張力異常增大產生痙攣時,為了患者的安全必須立刻停止被動訓練。本文提出的切換策略則可以通過檢測患者因痙攣抵抗被動訓練而產生的較大的 進而切換至助動訓練模式,保障了安全性。此外本研究FIS引入了 ,相較于傳統方法只通過單一信息 進行不同模式的切換與受試者運動意圖的識別[15],前者的切換策略響應速度要快于后者。試驗中可以通過調整ITH、STH的值來調整被動模式切換至助動模式的難度。經驗性地,本次試驗中統一取 ,,,其中 為同一受試者在助動模式下的均值。通過人機交互界面,當代理點由綠色變為紅色之后,受試者開始主動發力。為了便于觀察,當代理點為綠色時 ,當代理點為紅色時 ,被動模式下 ,助動模式下 。
如圖6所示,同一受試者在同一切換策略但不同評估指標 與 下,從被動模式切換至助動模式的響應時間,前者比后者用時縮短(1.18 ± 0.64)s(;)。如表3所示,使五名受試者完成十組隨機切換試驗,試驗中分別將本文方法的主動參與度 與傳統方法的 作為切換策略的輸入,對比兩者模式切換的響應時間,本文方法具有明顯的優勢。
圖6
切換響應時間對比
Figure6.
Comparison of response times for mode switching
3 討論與結論
對于運動功能障礙患者而言,過高或過低的訓練難度都會影響其訓練效果,康復治療師需依據評估結果為不同康復狀態的患者定制任務難度。相比于經典的方法,本文設計的切換策略可以通過調節ITH控制患者進入助動訓練需要的力度,通過調節STH控制患者進入助動訓練需要持續發力的時間,以及通過調節TTH控制因患者短時間能力不足無法繼續進行助動訓練而進入被動訓練的時間,提升了康復訓練的定制化程度。
本文的創新點如下:① 提出了一種新的評估方法,將患者與機器人的交互力及力的變化速率引入FIS,得到了一個新的評價指標——主動參與度 ,并以此選擇合適訓練模式。② 模式切換算法具有多個可調參數,以適應不同使用者的個性化需求。但是,盡管本文所提出的方法可以較好地實現兩種模式的切換,仍然需要開展進一步的研究。首先,本文提出的主動參與度 在[0, 1]之間變動,當患者的發力水平超過一定閾值之后,主動參與度 無法定量反映其更高水平的發力狀態,不利于后續康復醫師精確了解患者的康復狀態。其次本文中的受試者都是健康人群,缺乏足夠的患者訓練數據來對切換策略中的ITH、STH、TTH提供合理的參考設置。因此,后續研究將采集相應的上肢運動功能障礙患者的訓練數據,并依據患者的訓練感受調整模糊推理算法。
重要聲明
利益沖突聲明:本文全體作者均聲明不存在利益沖突。
作者貢獻聲明:概念:施長城、張佳楫;方法:李國寧、陶亮;軟件:李國寧、孟京艷、葉思佳;實驗設計:李國寧、施長城;數據收集:李國寧、胡陽;數據分析:李國寧、馮光;調查:趙大正、唐敏;資源:左國坤、施長城、宋濤、伏榮真;寫作-初稿準備:李國寧、施長城;寫作評論和編輯:施長城、左國坤;可視化與監督:施長城、張佳楫;項目管理:施長城、左國坤;所有作者均已閱讀并同意稿件的出版版本。
倫理聲明:本研究通過了中國科學院寧波材料技術與工程研究所生物倫理委員會的審批。