針對外科醫生長時間保持手術姿態而造成的肌肉和關節損傷的現狀,本文通過分析手術姿態,分別對不同關節進行構型研究,設計了一種具有多關節機構的醫用多位姿輔助支撐外骨骼。然后通過建立人機靜力學模型,本研究得到人體穿戴外骨骼前后的關節扭矩、關節力,并用有限元分析軟件對外骨骼強度校核。結果表明,外骨骼最大應力小于材料強度要求,整體形變小,外骨骼結構強度滿足使用需求。最后,本研究選取受試者參與足底壓力試驗,并結合人機靜力學模型進行生物力學仿真,從足底壓力、關節扭矩和關節力、肌肉力和肌肉總體代謝三個方面進行結果分析,以評估外骨骼支撐性能。結果表明,外骨骼對全身有較好的支撐性,能夠減輕肌肉骨骼負擔。本研究的外骨骼機構更匹配外科醫生的實際工作需求,為醫用支撐外骨骼機構設計提供了一種新的范例。
引用本文: 戚開誠, 尹智揚, 張建軍, 宋井科, 喬高昆. 醫用多位姿輔助支撐外骨骼機構設計與支撐性能評估. 生物醫學工程學雜志, 2024, 41(2): 295-303. doi: 10.7507/1001-5515.202210040 復制
版權信息: ?四川大學華西醫院華西期刊社《生物醫學工程學雜志》版權所有,未經授權不得轉載、改編
0 引言
由于外科醫生手術時需要長時間保持靜止姿態,會增加外科醫生患肌肉骨骼疾病和關節炎的風險[1-4],不利于外科醫生使用手術器材進行精準操作,極大地降低了外科醫生的職業壽命。因此,如何減少外科醫生身體負擔,改善外科醫生的手術環境成為人們關注的焦點。
一些研究表明,根據環境特點和使用需求設計的外骨骼設備,可以減少身體因長時間保持固定姿勢而造成的損傷[5-7]。一種無源的可穿戴座椅Archelis(NITTO Inc.,日本)[8-9],在膝關節和踝關節處有限位機構,可以起到固定支撐的作用。其結構輕巧,不會阻礙穿戴者的正常活動,醫生可以借助Archelis緩解腿部肌肉疲勞。Yan等[10]設計了一款可穿戴式被動下肢外骨骼,當受試者穿戴外骨骼后可以行走、下蹲及爬樓梯。該外骨骼膝關節處有棘輪限位機構,可以減少大腿肌肉負荷,同時膝關節處的扭簧將下蹲的負功收集起來,在站立時釋放以達到輔助作用。Zhu等[11]設計了一款被動式助力外骨骼,通過調整滑塊的限位來調節膝關節支撐角度,而滑塊的設計可以使外骨骼不阻礙人體行走和坐/站。上述三種無源外骨骼都能夠減少占地空間,保證穿戴者的靈活性,但也降低了外骨骼的支撐穩定性,需要人體自身發力維持平衡。此外,一種有源下肢支撐外骨骼Chairless Chair(Noonee Inc.,瑞士)[12-13],僅需對其按下按鈕,就能對人體起到支撐作用,實現站立和行走等動作;但其為保證行走效果,外骨骼機構剛度不足,使得人體在坐姿狀態下的支撐性能有限。
從現有文獻看,目前支撐外骨骼主要針對下肢開發,該類外骨骼可以不阻礙人體下肢正常活動,具有一定的靈活性,但其固定姿態支撐性能不足;而對于外科醫生而言,長時間固定姿態工作占據大多數時間,偶爾需要小幅度行走來調整手術位置,在沒有上半身支撐的環境下,外科醫生頸部、肩部和背部同樣有較高的患病率[14-15],所以對上、下肢段同時提供支撐,將會在外科醫生手術時起到更好的輔助效果。
針對目前存在的問題,為了提高外骨骼對人體全身固定姿態的支撐性能,擴大對人體的支撐范圍,使外科醫生在工作中能長時間穩定支撐,本文依據外科醫生的工作姿態運動特性設計了一款對上、下肢段同時支撐的外骨骼,系統建立了評估外骨骼全身支撐性能的力學模型,并利用有限元分析軟件對外骨骼進行強度校核。為評估外骨骼的支撐性能,本文通過試驗對受試者穿戴外骨骼前后的足底壓力、關節扭矩和關節力、肌肉力和肌肉總體代謝等綜合分析,以期該外骨骼能夠實現全身支撐,減輕外科醫生工作時的肌肉骨骼負擔,減少肌肉、關節損傷風險,更匹配外科醫生的實際工作需求,為醫用支撐外骨骼機構設計提供一種新的范例。
1 外骨骼機構構型及其結構參數
1.1 醫用支撐外骨骼自由度配置
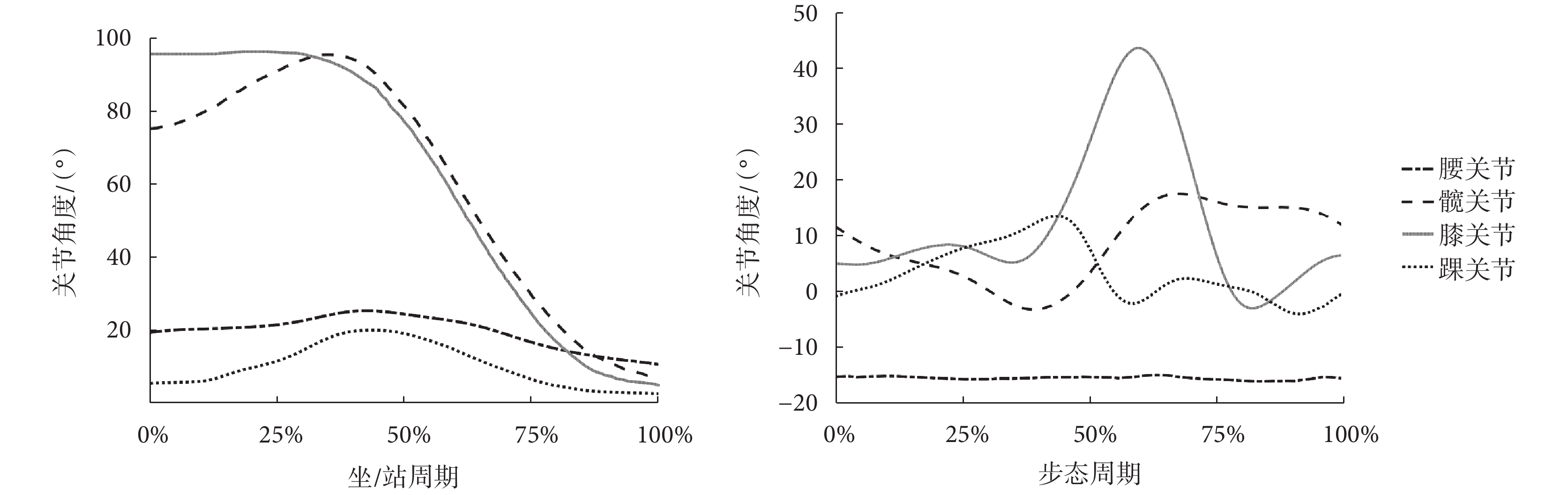
外科醫生手術工作時,外骨骼需要為其提供手術姿態和休息姿態支撐,并能夠小步幅小范圍行走;且手術時,需要外科醫生身體各關節有不同的傾角[16],結合人體運動特征,將外科醫生工作運動抽象為4自由度的關節運動,分別為腰、髖、膝關節的屈曲/伸展和踝關節的跖屈/背屈。利用三維運動捕捉系統Vicon T40–S(Oxford Metrics Ltd.,英國),采集了人體從坐到站以及小步幅行走時的關節角度的變化數據,如圖1所示。
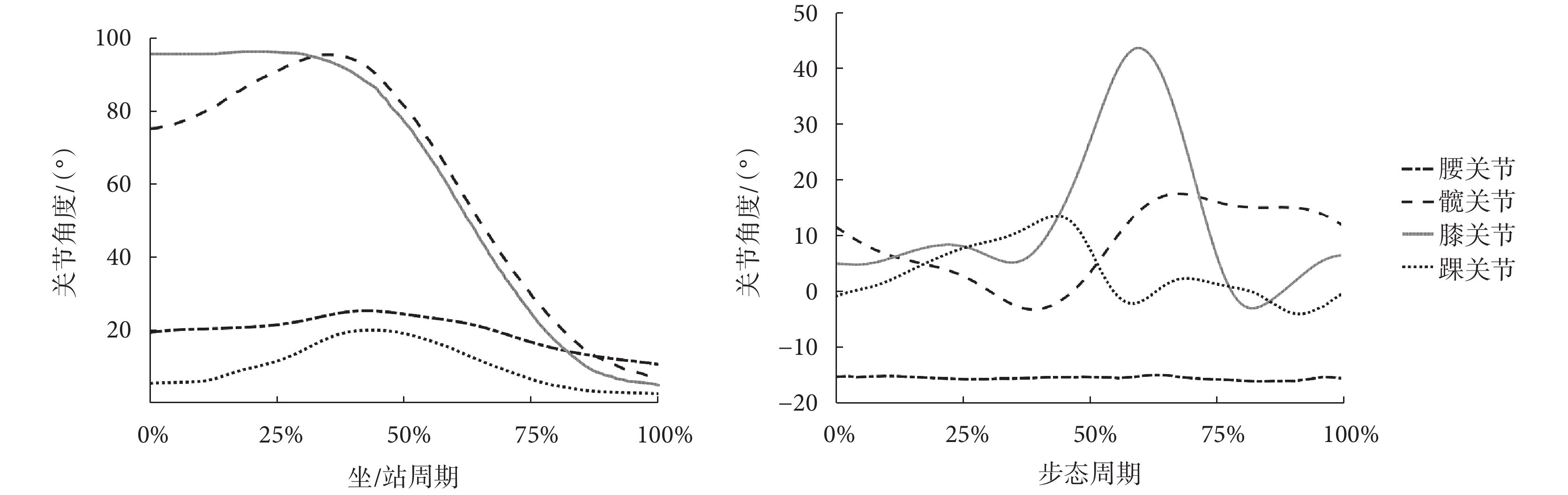 圖1
坐/站周期及步態周期中關節角度變化曲線
Figure1.
Curves of joint angle changes in sit/stand cycle and gait cycle
圖1
坐/站周期及步態周期中關節角度變化曲線
Figure1.
Curves of joint angle changes in sit/stand cycle and gait cycle
綜合人體坐/站轉換、行走和支撐時的關節運動角度,可得各關節的運動范圍,如表1所示,可以為外骨骼的機構設計提供理論依據,確保實現預期運動。
1.2 醫用支撐外骨骼機構設計
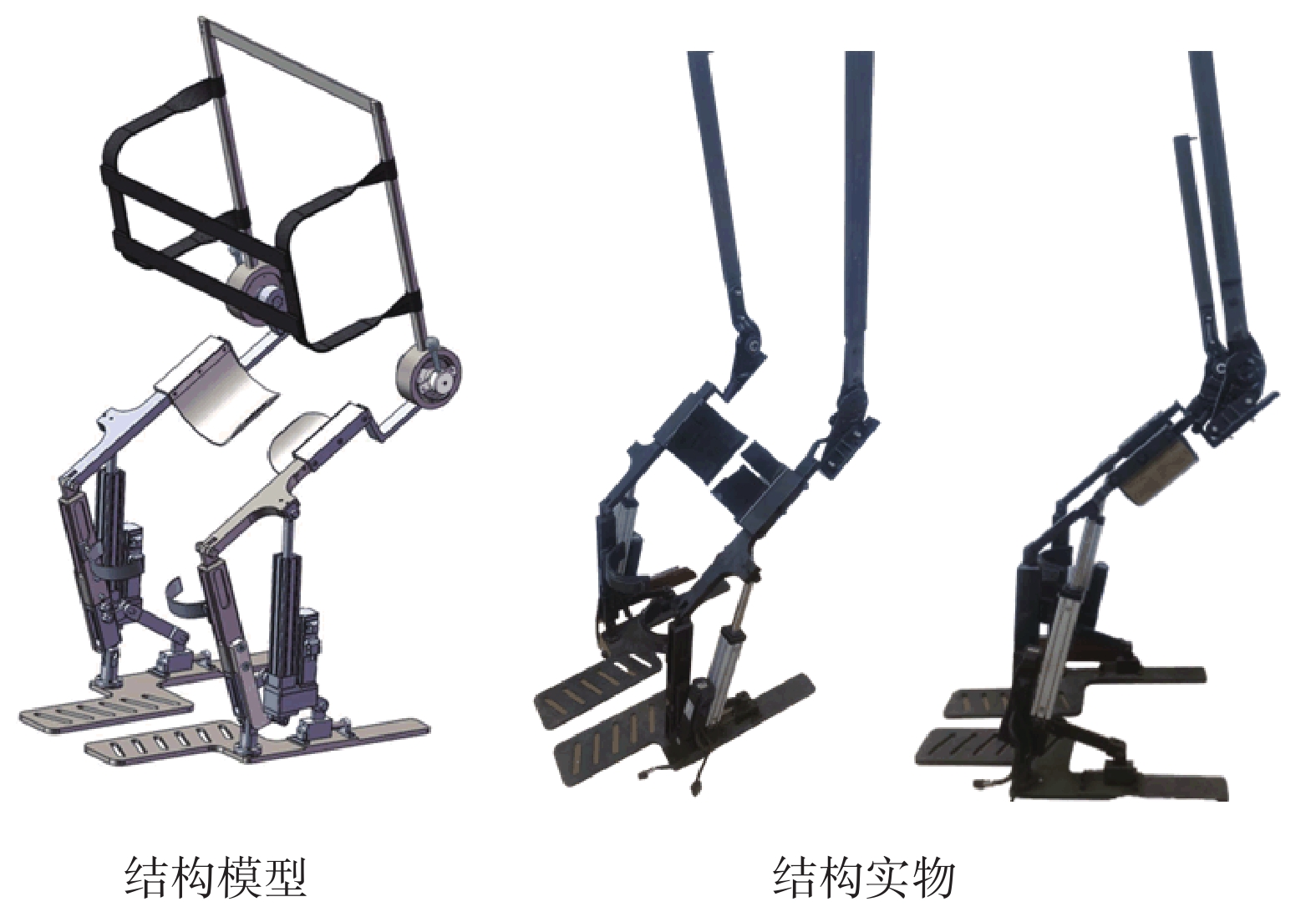
外骨骼整體結構如圖2所示,由踝、膝、髖關節機構組成。根據中國成年人體尺寸,小腿和大腿的長度調節范圍為372~419 mm和461~493 mm[17]。由于髖、膝、踝三個關節的運動范圍各不相同,需要對各個關節進行不同的機構設計。
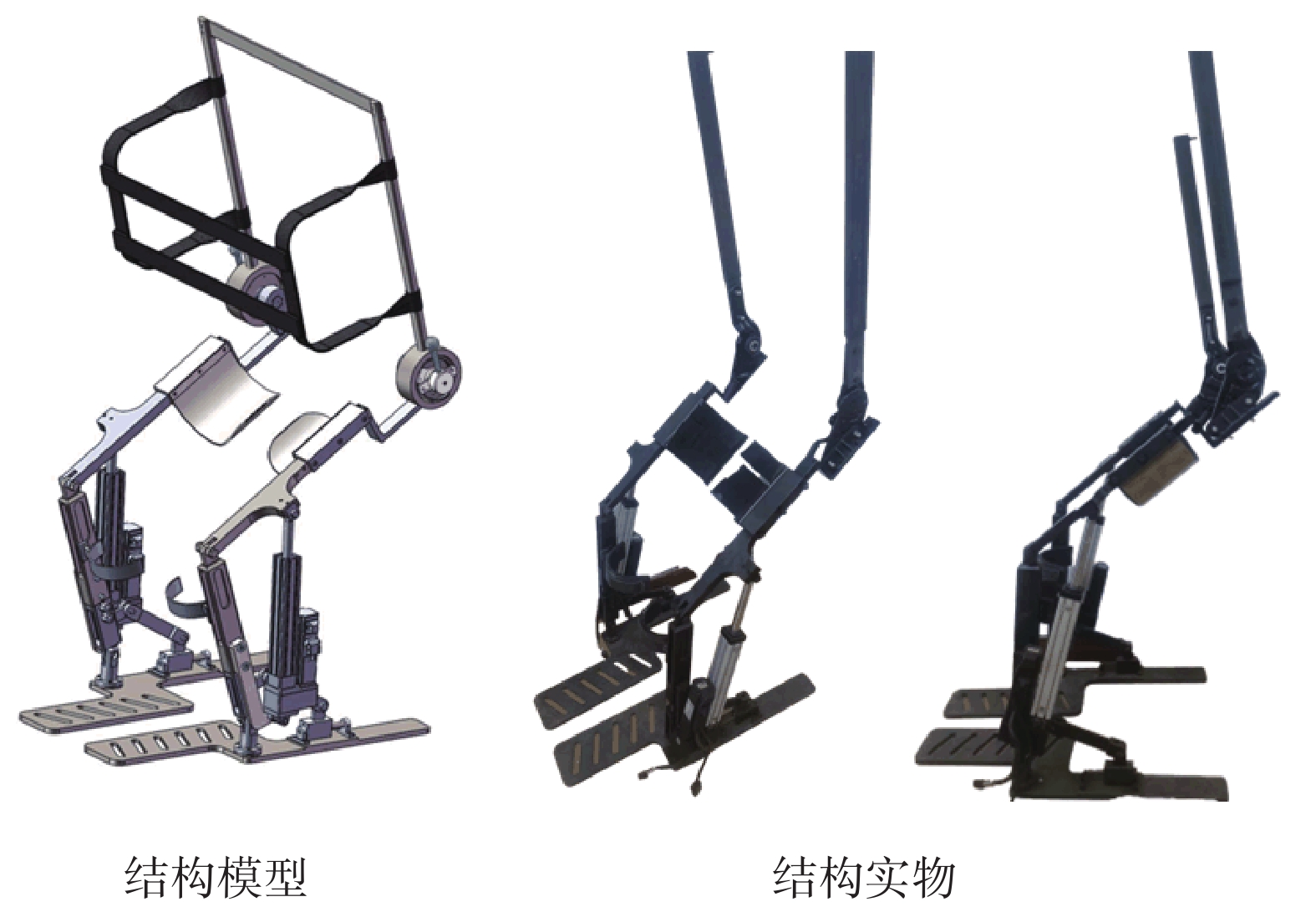 圖2
支撐外骨骼整體結構
Figure2.
Overall structure of the supporting exoskeleton
圖2
支撐外骨骼整體結構
Figure2.
Overall structure of the supporting exoskeleton
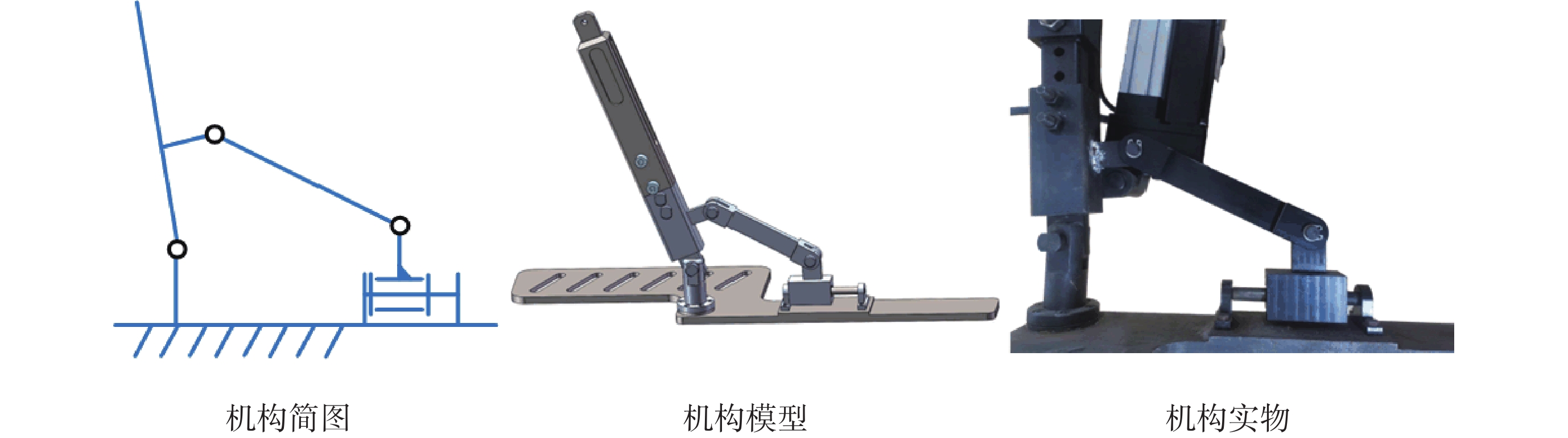
為保證小步幅行走和坐/站轉換過程中外骨骼不阻礙運動,踝關節處采用無源曲柄滑塊機構,如圖3所示,以小腿為曲柄帶動滑塊運動,滑塊前后添加有限位,可實現半蹲姿和坐姿支撐。
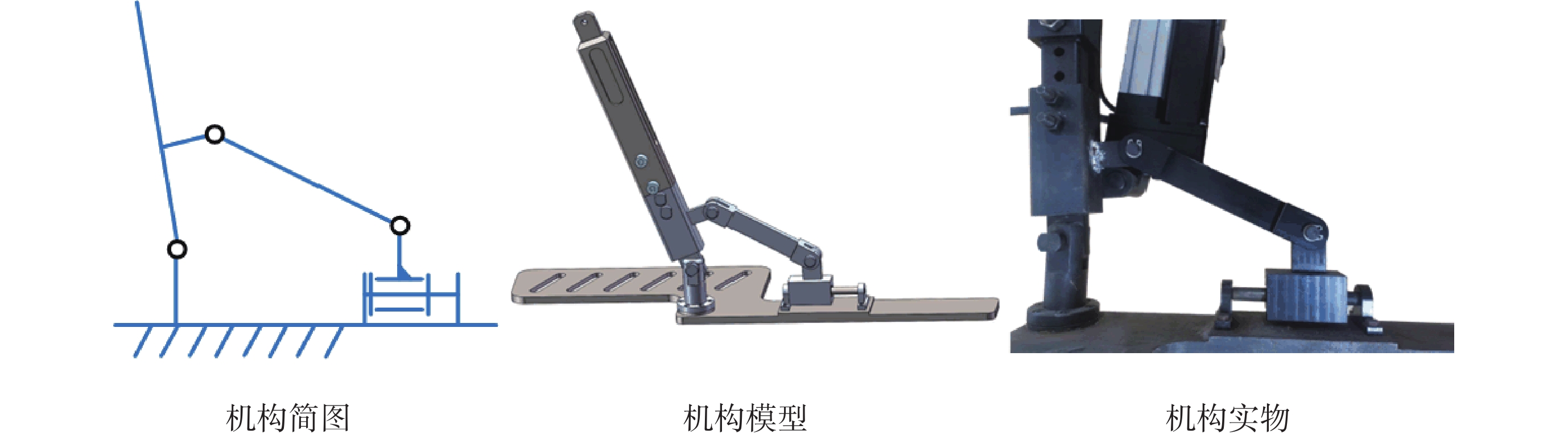 圖3
踝關節機構
Figure3.
Mechanism of the ankle joint
圖3
踝關節機構
Figure3.
Mechanism of the ankle joint
傳統膝關節機構一般采用電機或棘輪棘爪形式[18],使轉動副與膝關節轉動中心重合,保證與人體運動一致;但對于支撐型外骨骼,驅動件需要支撐人體全身重量,回轉型驅動件力臂較小,對人體施加的支撐力有限;而采用偏置擺動導桿機構,如圖4所示,以移動副作為驅動,則可以通過增大力臂提高機構的承載能力,再選取電動缸作為驅動使機構能夠在任意位置鎖死并提供支撐。
 圖4
膝關節機構
Figure4.
Mechanism of the knee joint
圖4
膝關節機構
Figure4.
Mechanism of the knee joint
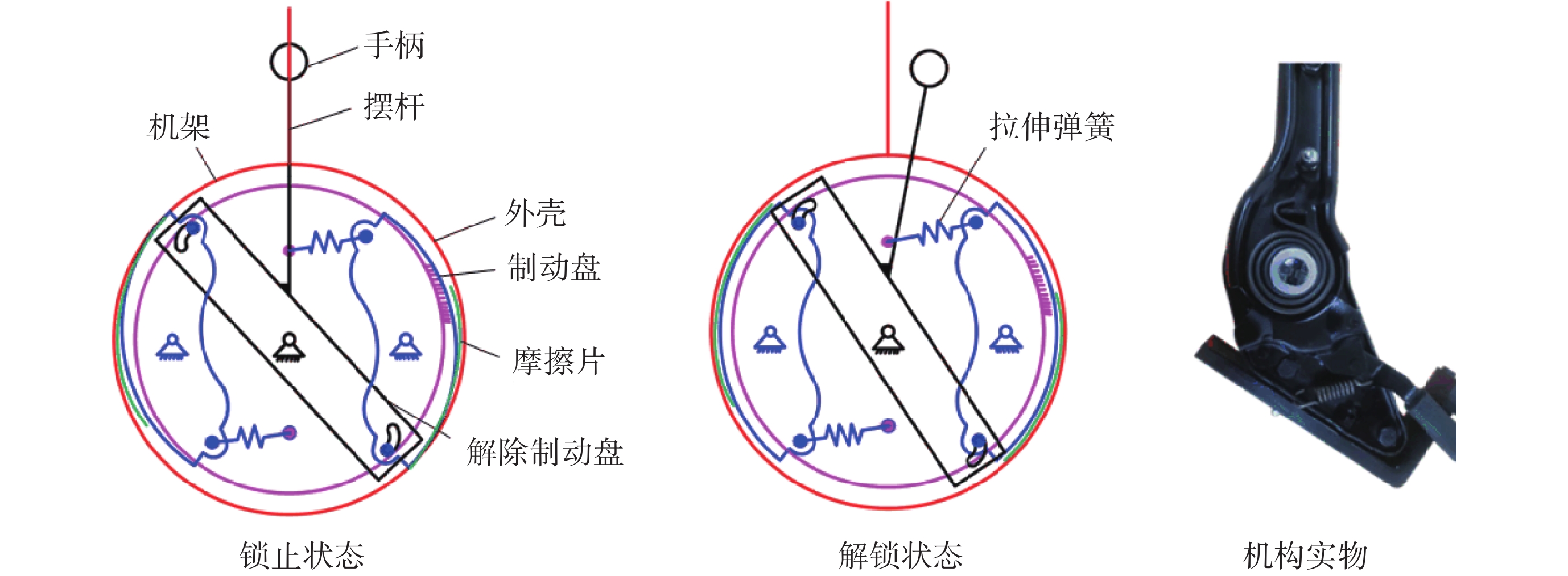
髖關節作為活動角度最大的關節,外骨骼機構的運動范圍需要與之匹配并隨時支撐,即實現大幅度轉動的同時能任意角度鎖死,如圖5所示。在鎖止狀態時拉伸彈簧一端與機架固連,另一端與制動盤轉動連接。拉伸彈簧的拉力使摩擦片與外殼接觸保持鎖止,當上身需要切換姿態時轉動手柄帶動解除制動盤轉動,克服拉伸彈簧的拉力作用使摩擦片與外殼脫離接觸,此時擺桿可以自由轉動。當需要支撐時松開手柄,在拉伸彈簧的拉力作用下自動復位保持鎖止。
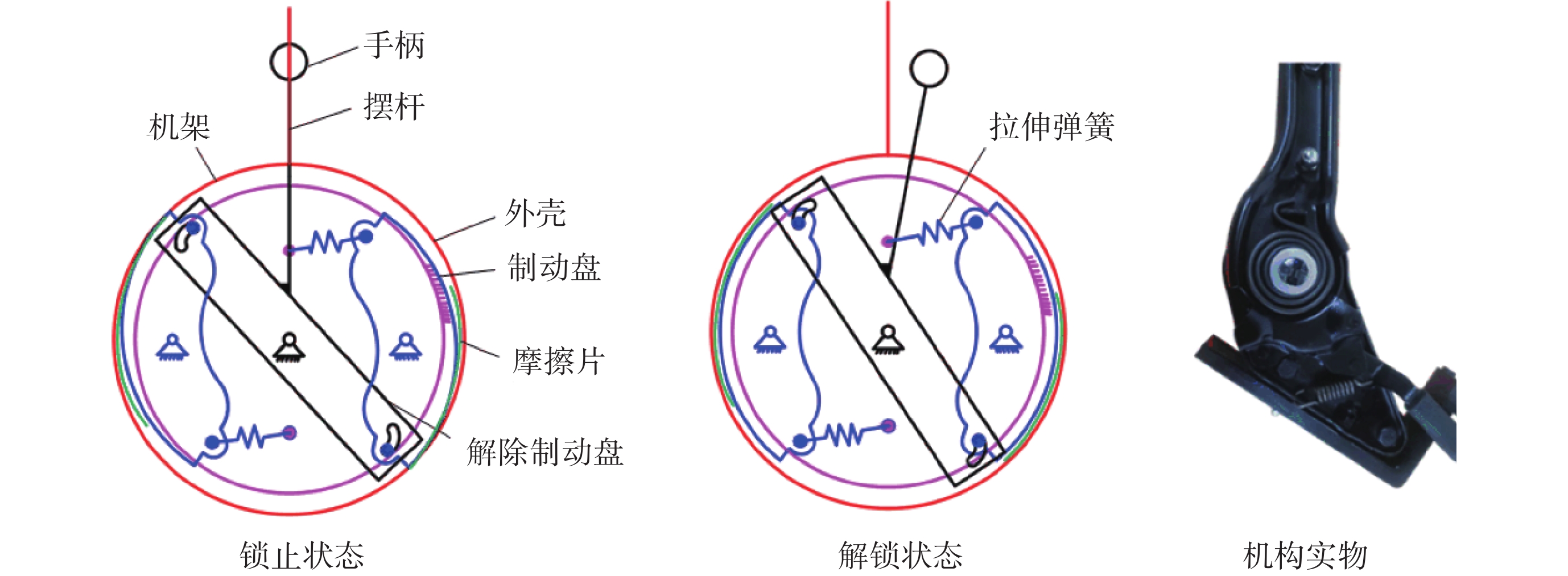 圖5
髖關節自鎖機構
Figure5.
Self-locking mechanism of the hip joint
圖5
髖關節自鎖機構
Figure5.
Self-locking mechanism of the hip joint
2 外骨骼靜力學分析
2.1 人機靜力學模型
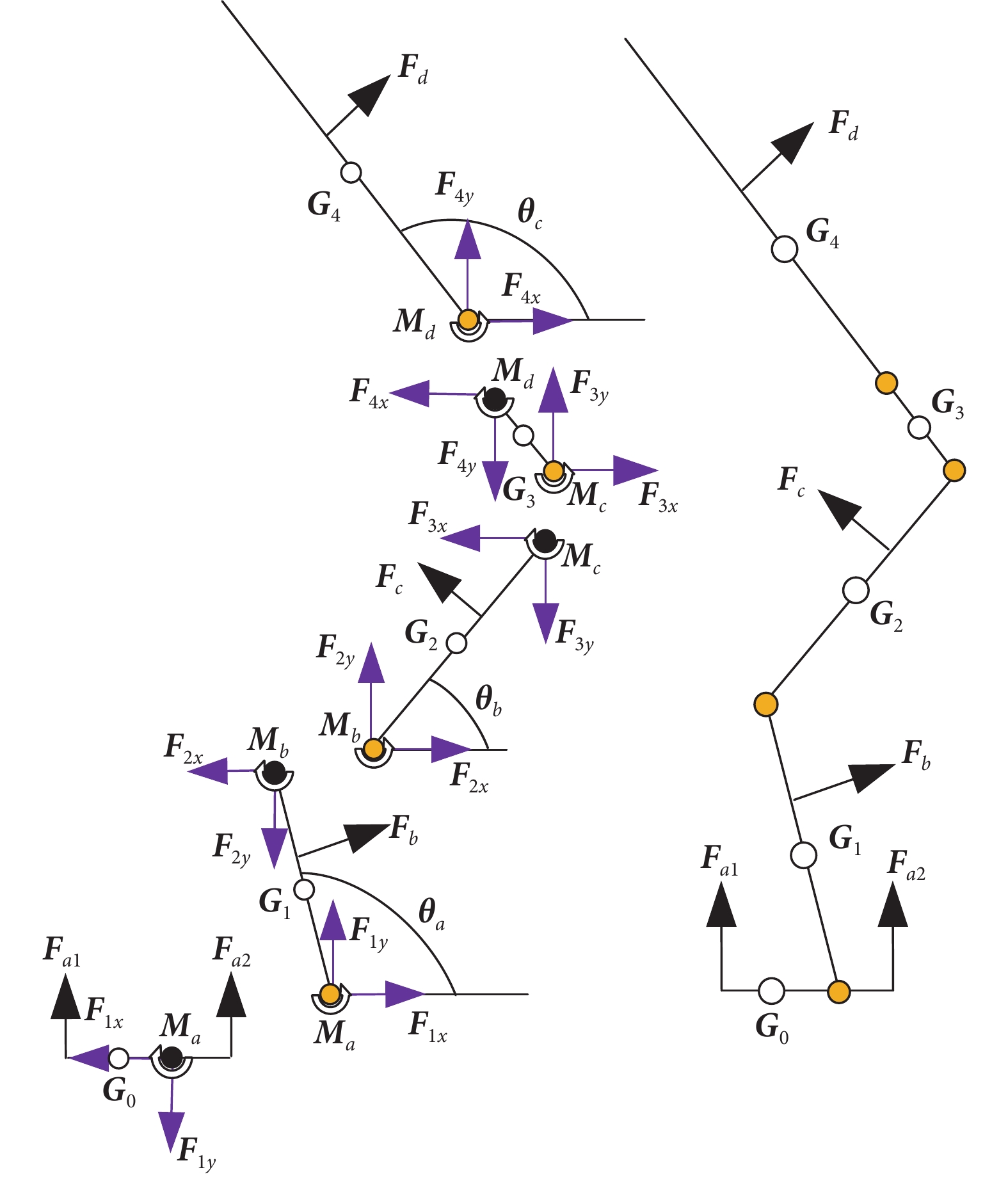
在外科醫生手術過程中,手臂和頭部沒有明顯的相對運動,因此將人體腰關節以上簡化為與人體上肢等質量的連桿。為方便分析,將人體骨盆、大腿、小腿和足部簡化為等質量的連桿,同時將腰、髖、膝、踝關節等效為連桿之間的關節鉸鏈,由此建立穿戴外骨骼后的人體五桿模型[19]。由于人體運動主要發生在矢狀面內,在穿戴外骨骼的情況下,人體五桿模型在矢狀面內的投影和各連桿受力分析如圖6所示[20-22]。
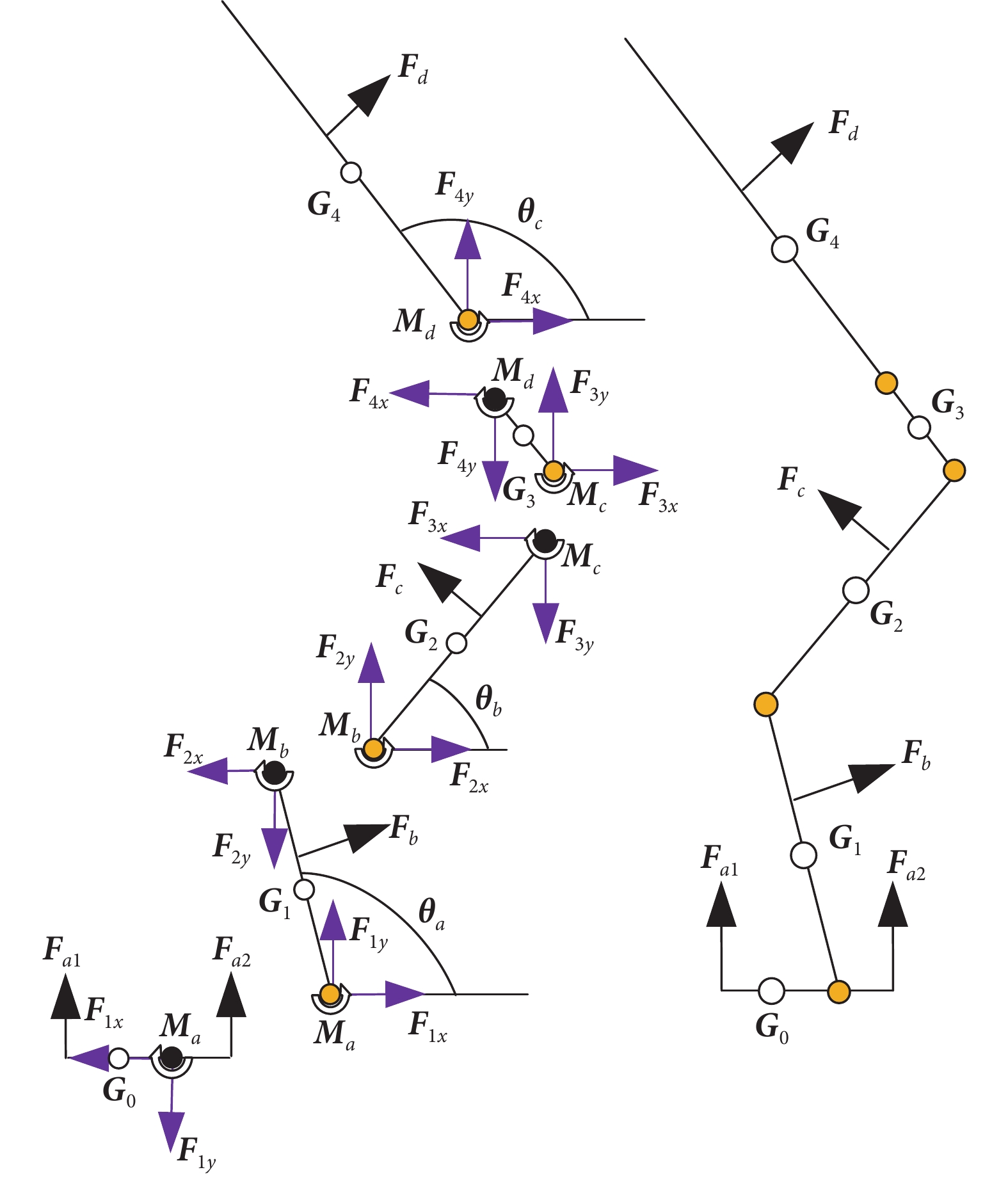 圖6
人機靜力學模型
Figure6.
Man-machine static model
圖6
人機靜力學模型
Figure6.
Man-machine static model
根據簡化的人體五桿模型,建立各肢段的力平衡和扭矩平衡方程,如式(1)~式(5)所示:
 |
 |
 |
 |
 |
其中,θa、θb、θc分別為踝、膝、髖關節的彎曲角度, G0、G1、G2、G3、G4分別為足部、小腿、大腿、骨盆、上肢軀干的重力,F1x 、F1y、F2x、F2y、F3x、F3y、F4x、F4y和Ma、Mb、Mc、Md分別為踝、膝、髖、腰關節間的相互作用力及關節扭矩。Fb 、Fc、Fd分別為外骨骼對小腿、大腿和上半身的支撐力,Fa1、Fa2分別為地面對前腳掌和后腳掌的力,反映足底壓力的大小和分布情況,d0、d1、d2、d3、d4分別為足部、小腿、大腿、骨盆、上肢軀干的質心到各自轉動關節的距離(例:d2為大腿質心到膝關節的距離),l1、l2、l3分別為小腿、大腿和骨盆的長度,db、dc、dd分別為外骨骼支撐力Fb 、Fc、Fd作用點到各自轉動關節的距離(例:dc為Fc作用點到膝關節的距離),da1、da2分別為前腳掌、后腳掌到踝關節的距離。
方程組式(1)~式(5)共15個獨立方程,其中包含外骨骼和地面對人的5個外力、8個關節力以及4個關節扭矩,共計17個獨立變量。根據足底壓力試驗中采集的相關數據,以Fa1和Fa2為定量,從而使獨立方程數與獨立變量數一致,得到足底壓力與關節扭矩、關節力、外骨骼支撐力的確定關系。當外骨骼支撐力為0時,可以計算出人體穿戴外骨骼前的關節扭矩和關節力。
2.2 外骨骼強度校核
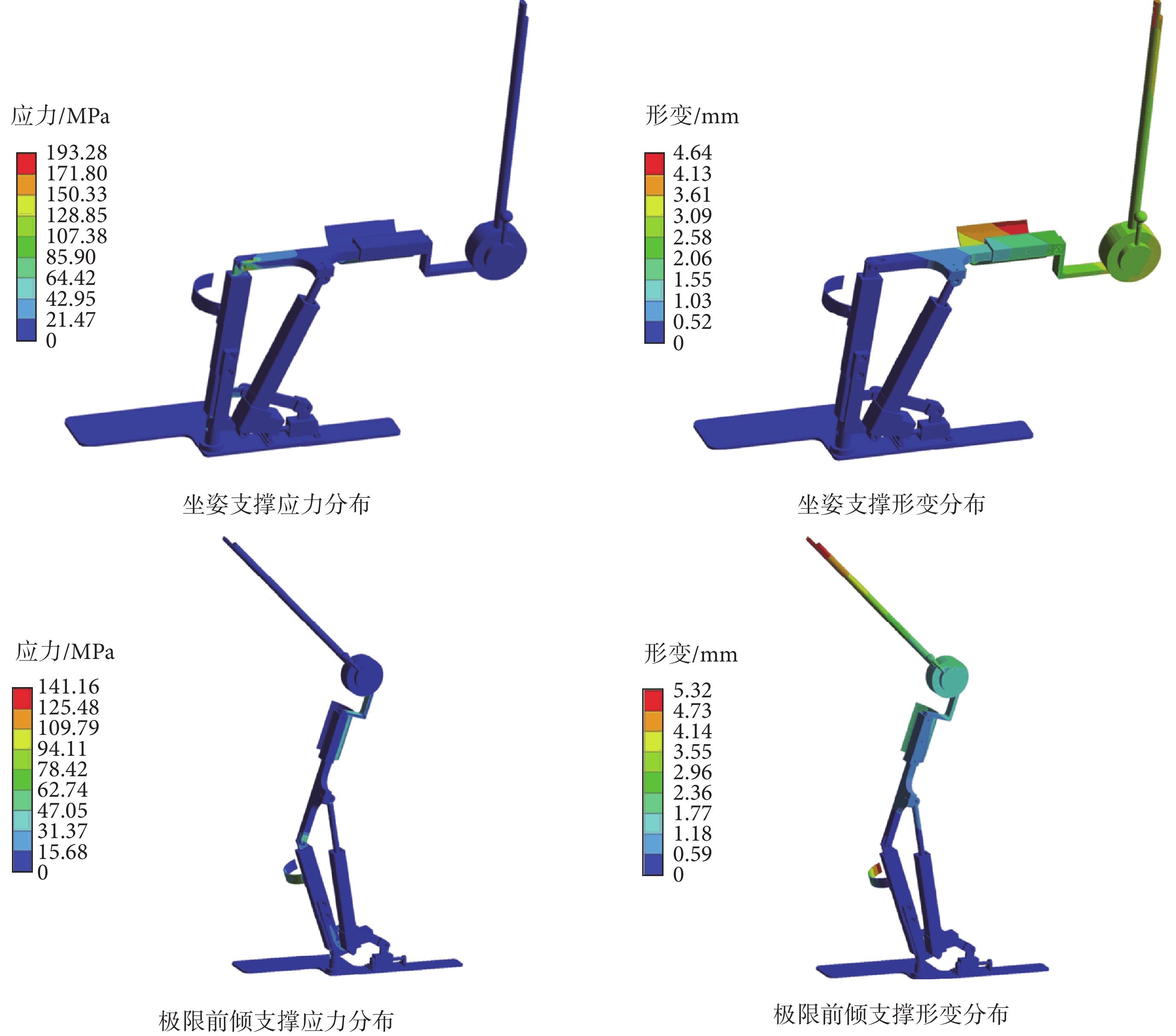
當人體不發力即關節扭矩Ma、Mb、Mc、Md為零時,外骨骼受到的支撐反力最大,對該狀態的外骨骼進行強度分析。為反映外骨骼極限受力情況,對外骨骼坐姿和極限前傾姿態的整體應力和形變分布情況進行分析。根據人機靜力學模型計算支撐反力,坐姿取θa = 86°、θb = 0°、θc=90°,此時人體小腿和上身對外骨骼無作用力,Fc為人體的一半重量,計算得到:Fb = 0 N、Fc = 392 N、Fd = 0 N。極限前傾取θa = 110°、θb = 75°、θc = 135°,計算得到:Fb = 333.7 N、Fc = 257.8 N、Fd = 255.7 N。
將外骨骼模型導入有限元分析軟件ANSYS workbench 19.2(ANSYS Inc.,美國)中,分別添加45鋼、6061鋁、Q235鋼的相關材料參數,將支撐反力分別添加至外骨骼模型相應的受力位置,仿真結果如圖7所示。坐姿和極限前傾姿態支撐時最大應力分別為193.28 MPa、141.16 MPa。由于外骨骼部分構件采用45鋼,滿足材料強度要求。坐姿和極限前傾姿態支撐時最大形變量分別為4.65 mm、5.32 mm,形變較小,證明外骨骼結構強度滿足使用要求,能夠為人體提供安全、可靠的支撐。
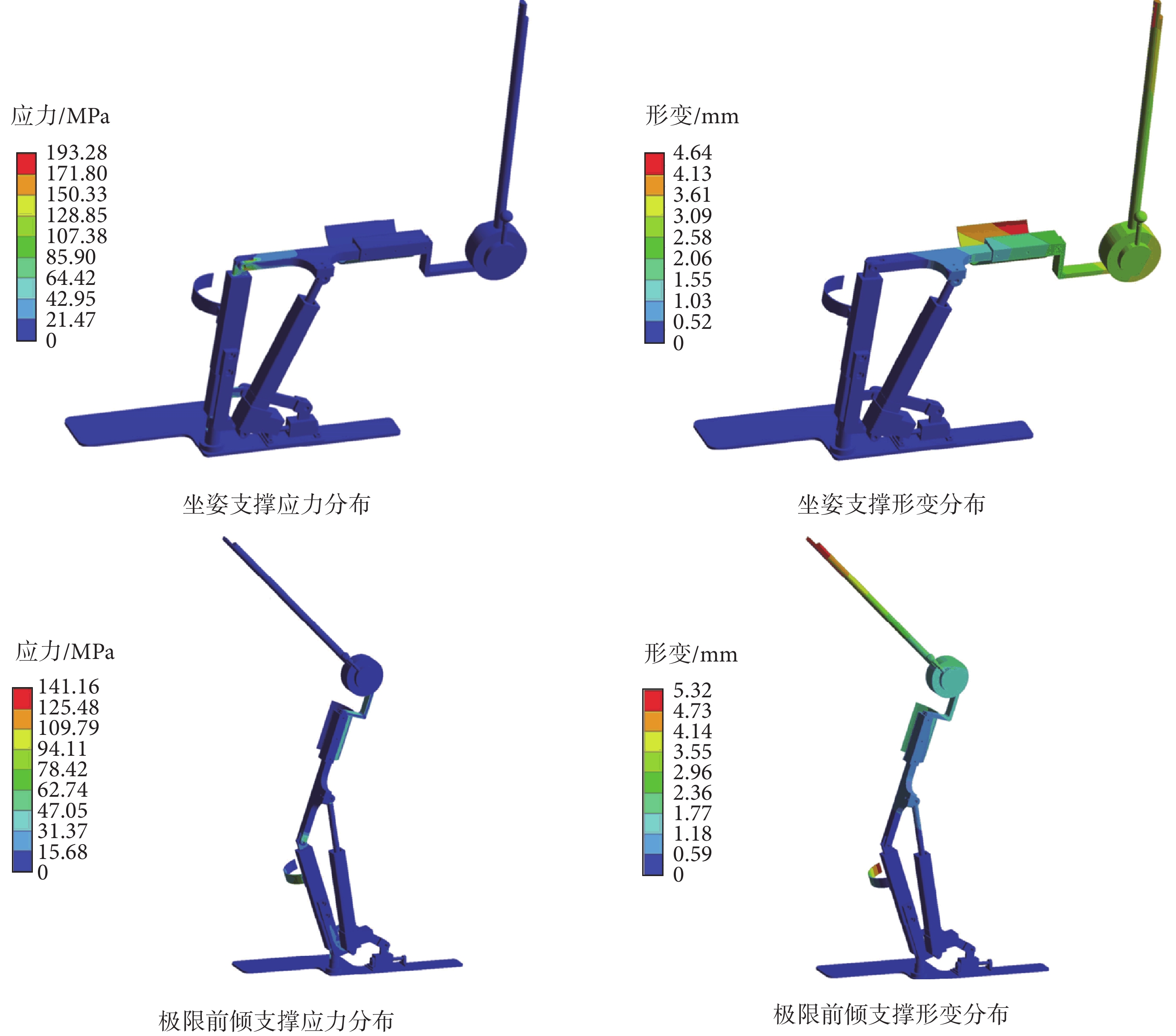 圖7
2種姿態下的外骨骼強度分析
Figure7.
Strength analysis of exoskeleton in two postures
圖7
2種姿態下的外骨骼強度分析
Figure7.
Strength analysis of exoskeleton in two postures
3 外骨骼支撐性能評估
3.1 試驗設計
試驗自變量是4種不同的支撐姿態:膝關節分別彎曲50°、60°、70°以及坐姿。受試者分別在有、無外骨骼狀態下進行支撐并模擬醫生手術動作。足底壓力采集硬件系統如圖8所示,由個人計算機(personal computer,PC)、數據采集卡、電壓轉換模塊和薄膜壓力傳感器組成。其中,壓力傳感器選用DF9-16薄膜柔性壓力傳感器(Leanstar Ltd.,中國),量程為0~100 N。數據采集卡采用SUB-6216(National Instruments Inc.,美國),該模塊提供16路模擬輸入,每個通道可編程輸入范圍為:± 0.2~± 10 V。
 圖8
足底壓力硬件系統
Figure8.
Plantar pressure hardware system
圖8
足底壓力硬件系統
Figure8.
Plantar pressure hardware system
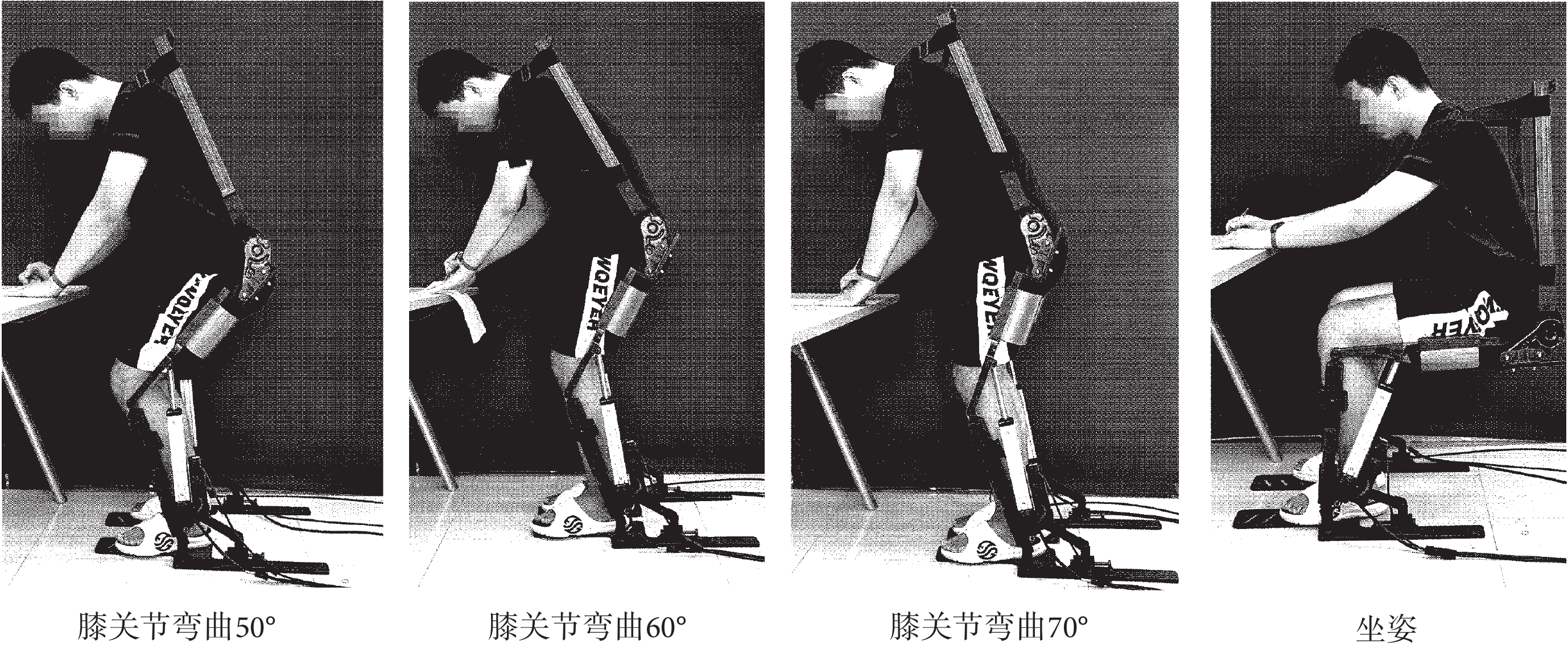
本試驗招募了7名健康男性作為受試者,身高在168~183 cm之間,體重在55~80 kg之間,年齡在23~27歲。試驗采集地為河北工業大學機器人感知與人機融合重點實驗室。受試者均自愿參加試驗,并簽署了試驗知情同意書,本研究通過了河北工業大學倫理委員會的審批(批文編號:HEBUThMEC2020007)。如圖9所示,展示了受試者穿戴外骨骼后4種不同的支撐姿態。
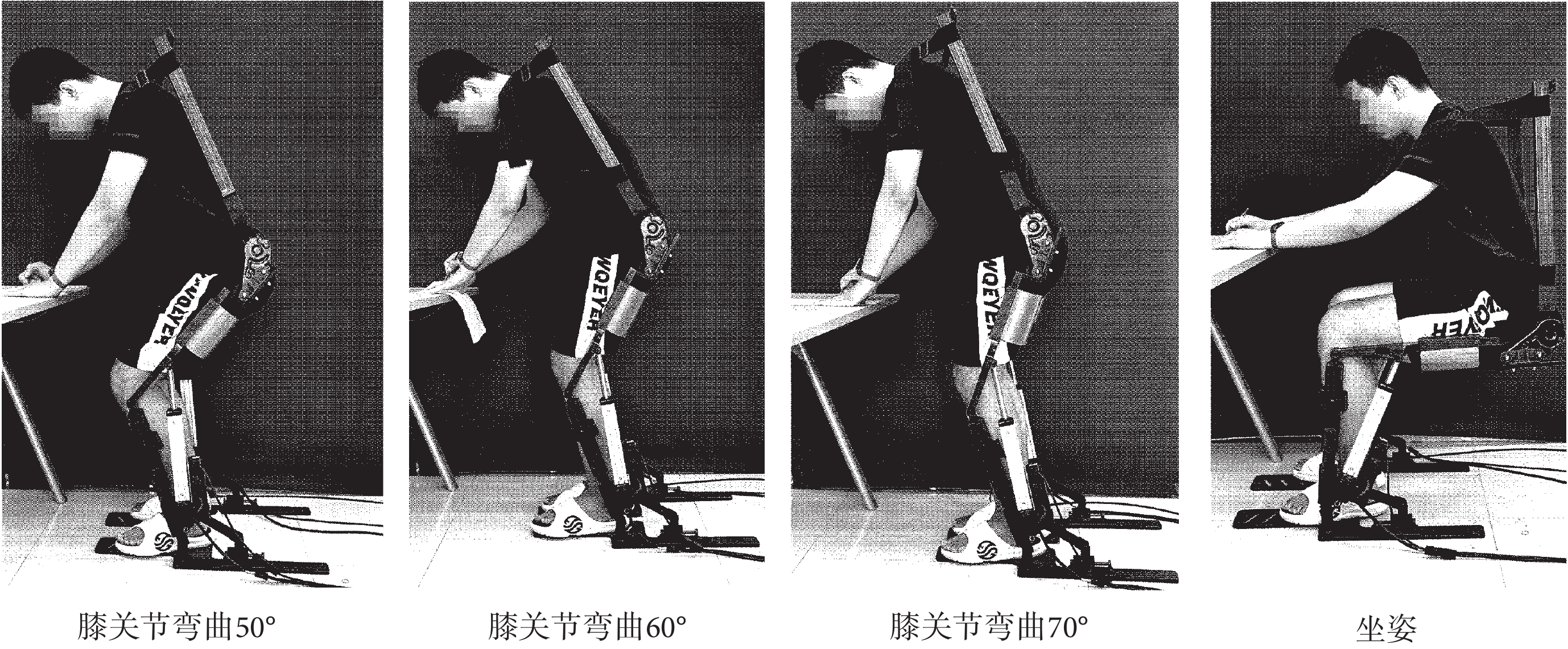 圖9
受試者4種不同的支撐姿態
Figure9.
Four different supporting postures of the subject
圖9
受試者4種不同的支撐姿態
Figure9.
Four different supporting postures of the subject
3.2 足底壓力分析
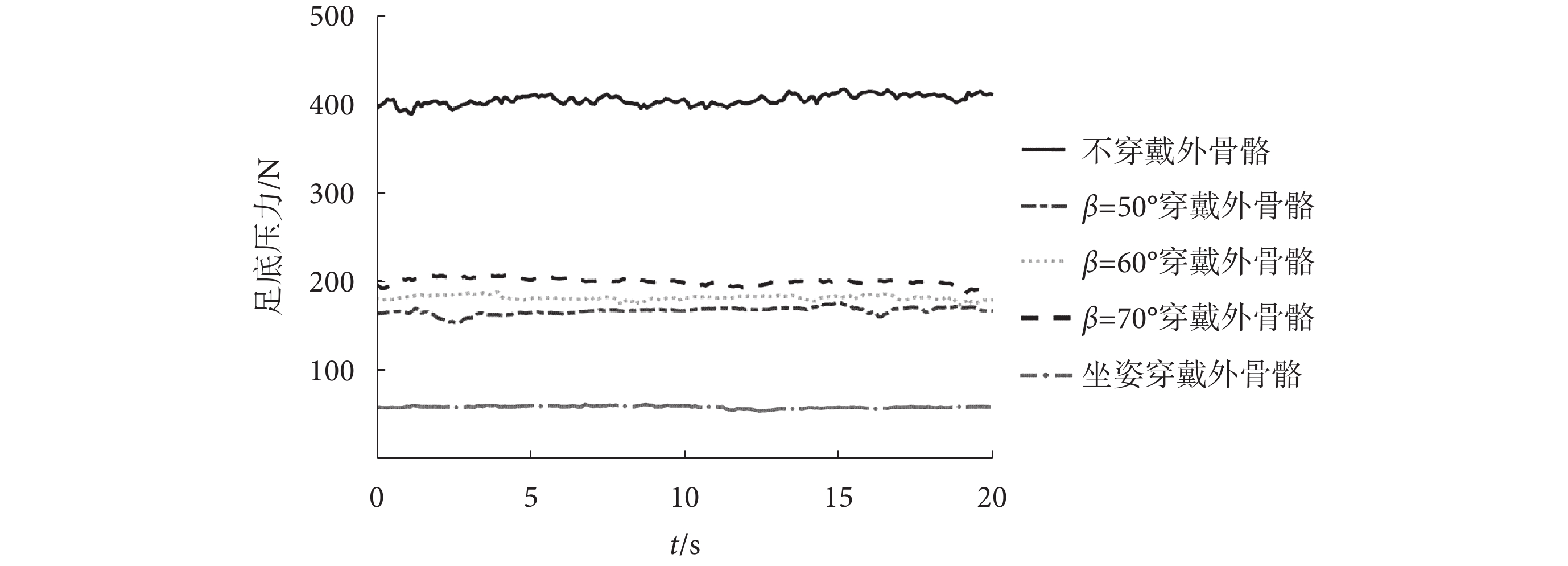
受試者在不穿戴外骨骼時,不同姿態下足底壓力值差異不具有統計學意義,因此對不同姿態下不穿戴外骨骼的足底壓力相加取平均值。4種姿態下穿戴外骨骼前后的足底壓力情況如圖10所示,其中β表示膝關節彎曲角度。
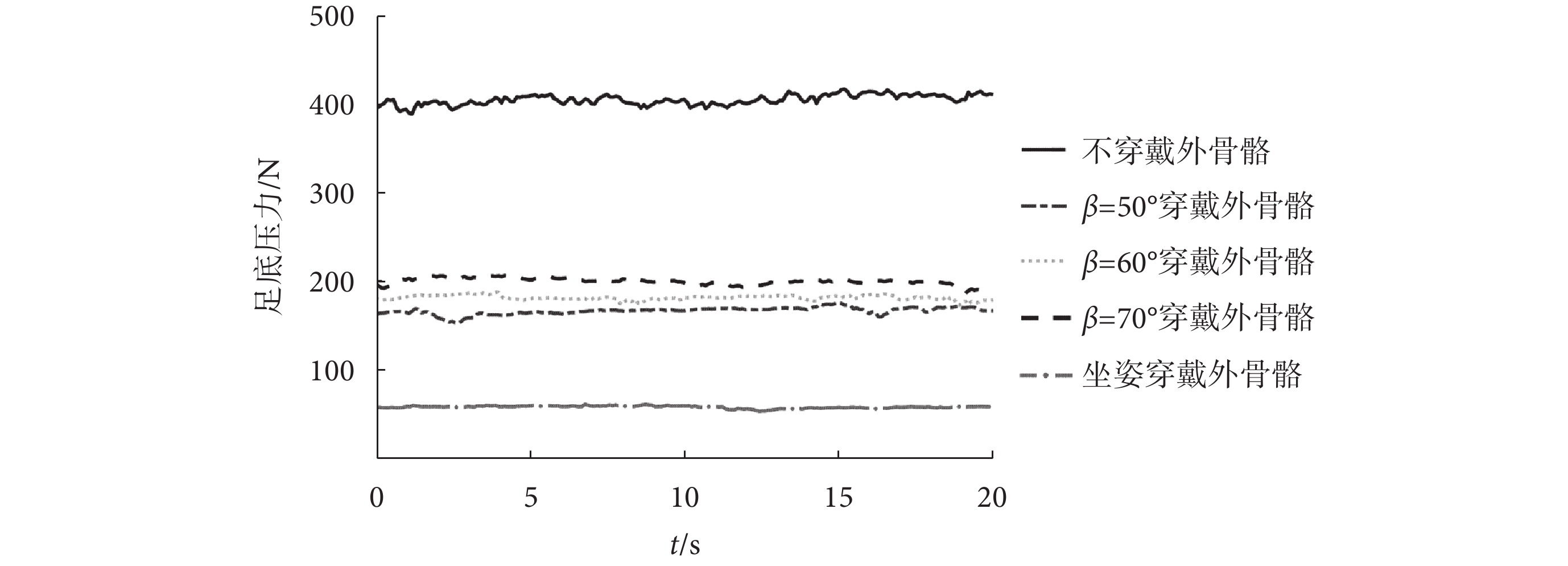 圖10
不同姿態模擬任務時的足底壓力
Figure10.
Plantar reaction in simulation tasks with different postures
圖10
不同姿態模擬任務時的足底壓力
Figure10.
Plantar reaction in simulation tasks with different postures
當受試者穿戴外骨骼在4種支撐姿態下進行支撐時,相較于未穿戴外骨骼,足底壓力均有所降低,降低程度最高可達85.92%,表明外骨骼可以支撐人體部分體重,能有效降低醫生的疲勞感。
3.3 關節力和關節扭矩分析
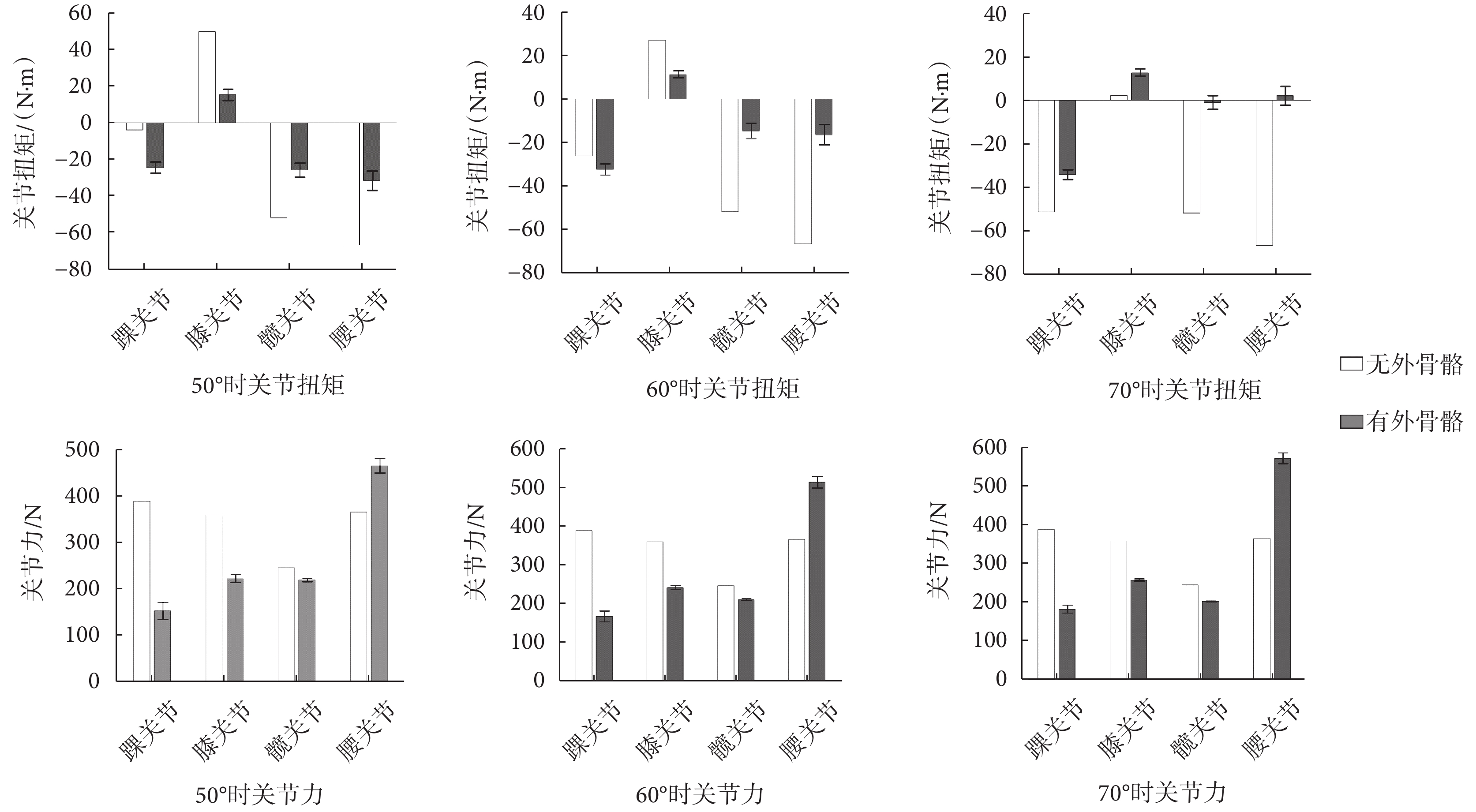
根據式(1)~式(5)并結合足底壓力數據,可以得到受試者穿戴外骨骼前后的關節扭矩和關節力,如圖11所示。
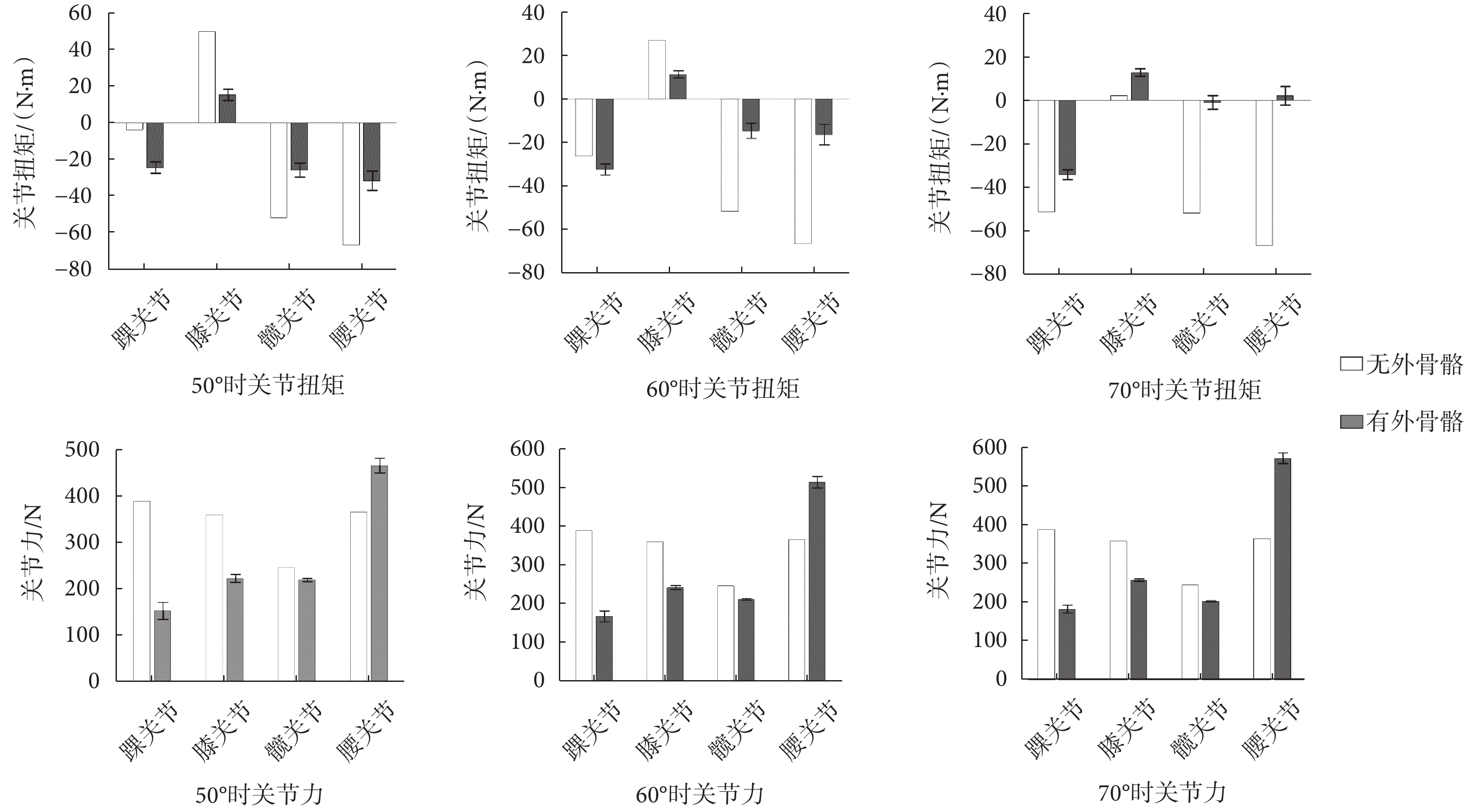 圖11
膝關節彎曲50°、60°、70°時的關節扭矩和關節力
Figure11.
Joint torques and joint forces at knee flexion of 50°、60° 、70°
圖11
膝關節彎曲50°、60°、70°時的關節扭矩和關節力
Figure11.
Joint torques and joint forces at knee flexion of 50°、60° 、70°
結果顯示,受試者在穿戴外骨骼時的腰、髖關節扭矩降低程度更明顯,隨膝關節彎曲角度增加,降低程度在52.33%~96.96%和49.78%~98.01%范圍內變化。此外,受試者在穿戴外骨骼的3種支撐姿態下的髖、膝、踝關節力也均有不同程度的降低,表明外骨骼有減少部分關節負擔的效果,可降低關節損傷的風險。
3.4 肌肉力和肌肉總體代謝分析
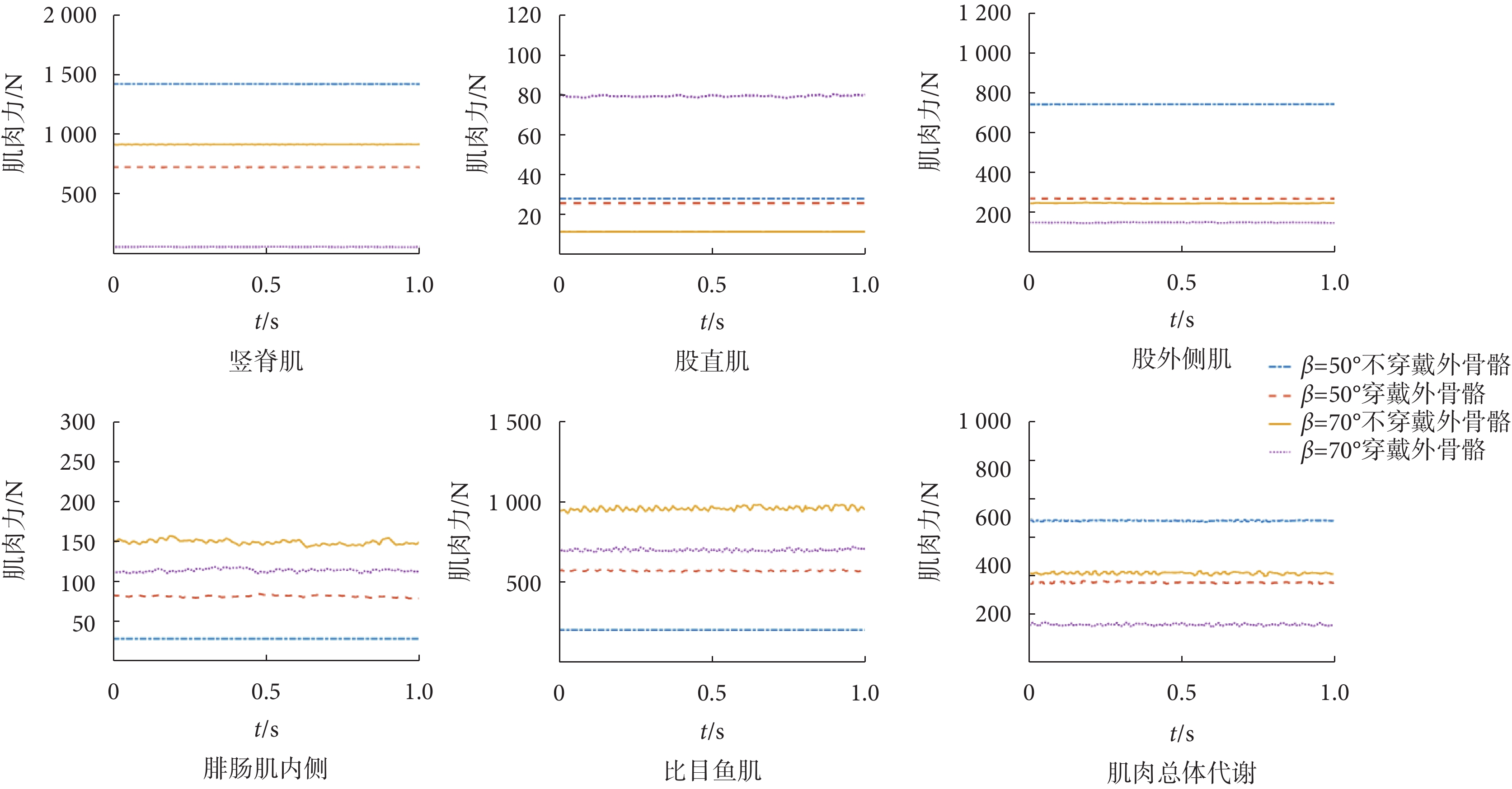
在生物力學仿真軟件Opensim 4.3(Stanford University,美國)中導入由三維運動捕捉系統Vicon T40-S(Oxford Metrics Ltd.,英國)試驗得到的標記點參數和人體參數,對人體模型進行縮放和逆運動學計算[23];然后導入足底壓力數據,通過逆動力學計算得到各個關節的關節扭矩;最后通過殘差縮減和肌肉控制計算求解出穿戴外骨骼前后的肌肉力和肌肉總體代謝情況[24]。仿真結果如圖12所示,其中β表示膝關節彎曲角度。
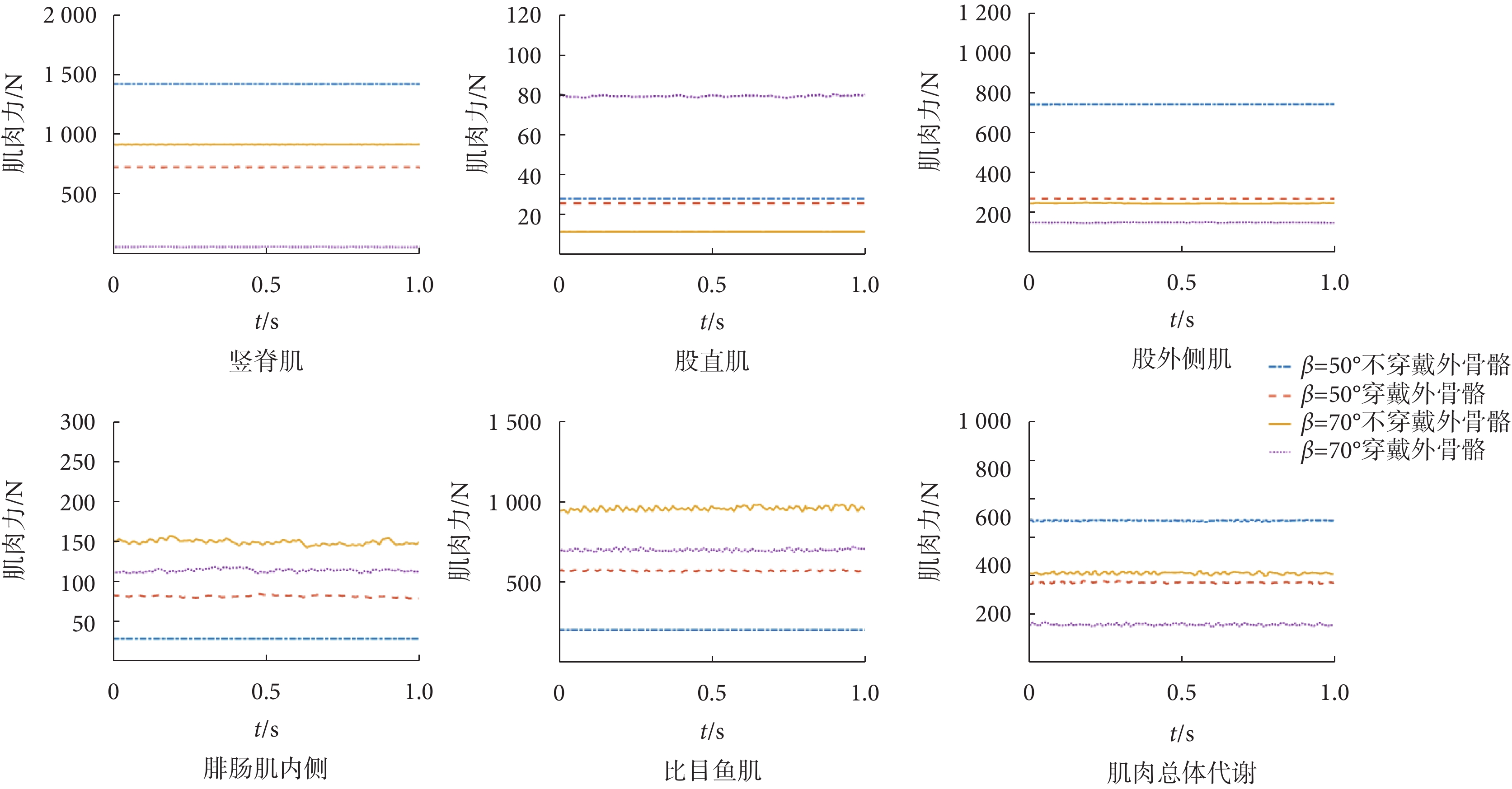 圖12
膝關節彎曲50°、70°時的肌肉力及肌肉總體代謝
Figure12.
Muscle forces and total muscle metabolism at knee flexion of 50 °、70 °
圖12
膝關節彎曲50°、70°時的肌肉力及肌肉總體代謝
Figure12.
Muscle forces and total muscle metabolism at knee flexion of 50 °、70 °
受試者在穿戴外骨骼的2種支撐姿態下的肌肉總體代謝有所降低,其中,主要發力肌肉豎脊肌、股外側肌的激活程度有所降低,降低范圍在48.89%~93.49%和39.86%~63.87%之間,該肌肉群分布在腰部和大腿,表明外骨骼對大腿和腰部的省力效果明顯。
4 總結
本文針對需要長時間站立或半蹲姿的外科手術醫生易患肌肉骨骼疾病的特點,以延長外科手術醫生的職業壽命為目的,通過研究外科醫生不同工作姿態的關節運動范圍,圍繞各個關節進行構型分析,設計了一種具有多關節機構的輔助支撐外骨骼,實現了多種姿態下的全身支撐。本文基于人體腰、髖、膝、踝在矢狀面的自由度分析,將人體簡化為剛性五桿模型,建立人機靜力學模型,得到足底壓力與關節扭矩、關節力的關系。本文還通過足底壓力試驗證實,受試者穿戴外骨骼后足底壓力顯著降低,表明外骨骼能支撐部分體重,有效降低醫生的疲勞感。將足底壓力帶入靜力學模型計算得到關節扭矩和關節力,結果顯示外骨骼可降低大部分關節的關節扭矩和關節力,有效降低關節損傷的風險。通過分析Opensim4.3(Stanford University,美國)的仿真結果,進一步驗證了外骨骼能有效降低肌肉總體代謝和主要發力肌肉的激活程度,說明外骨骼可以緩解肌肉疲勞,提高工作效率。本課題組將該外骨骼與其他外骨骼進行大致對比,結果如附表1所示,本文的外骨骼從3項指標全面評估了外骨骼的支撐性能;以肌肉力減少為例,其他外骨骼對小腿肌肉省力效果明顯,而本文的外骨骼對大腿和腰部肌肉省力效果明顯;由于外科手術醫生易患的肌肉骨骼疾病大多集中在腰部和髖部[2-3],證明該外骨骼對外科手術醫生患病類型更具有針對性。
重要聲明
利益沖突聲明:本文全體作者均聲明不存在利益沖突。
作者貢獻聲明:戚開誠負責項目主持、試驗流程與指導、機構構型設計;尹智揚負責仿真數據分析、論文編寫;張建軍負責數據分析指導、論文審閱修訂;宋井科、喬高昆負責仿真工作指導、實體樣機設計。
倫理聲明:本研究通過了河北工業大學倫理委員會的審批(批文編號:HEBUThMEC2020007)。
0 引言
由于外科醫生手術時需要長時間保持靜止姿態,會增加外科醫生患肌肉骨骼疾病和關節炎的風險[1-4],不利于外科醫生使用手術器材進行精準操作,極大地降低了外科醫生的職業壽命。因此,如何減少外科醫生身體負擔,改善外科醫生的手術環境成為人們關注的焦點。
一些研究表明,根據環境特點和使用需求設計的外骨骼設備,可以減少身體因長時間保持固定姿勢而造成的損傷[5-7]。一種無源的可穿戴座椅Archelis(NITTO Inc.,日本)[8-9],在膝關節和踝關節處有限位機構,可以起到固定支撐的作用。其結構輕巧,不會阻礙穿戴者的正常活動,醫生可以借助Archelis緩解腿部肌肉疲勞。Yan等[10]設計了一款可穿戴式被動下肢外骨骼,當受試者穿戴外骨骼后可以行走、下蹲及爬樓梯。該外骨骼膝關節處有棘輪限位機構,可以減少大腿肌肉負荷,同時膝關節處的扭簧將下蹲的負功收集起來,在站立時釋放以達到輔助作用。Zhu等[11]設計了一款被動式助力外骨骼,通過調整滑塊的限位來調節膝關節支撐角度,而滑塊的設計可以使外骨骼不阻礙人體行走和坐/站。上述三種無源外骨骼都能夠減少占地空間,保證穿戴者的靈活性,但也降低了外骨骼的支撐穩定性,需要人體自身發力維持平衡。此外,一種有源下肢支撐外骨骼Chairless Chair(Noonee Inc.,瑞士)[12-13],僅需對其按下按鈕,就能對人體起到支撐作用,實現站立和行走等動作;但其為保證行走效果,外骨骼機構剛度不足,使得人體在坐姿狀態下的支撐性能有限。
從現有文獻看,目前支撐外骨骼主要針對下肢開發,該類外骨骼可以不阻礙人體下肢正常活動,具有一定的靈活性,但其固定姿態支撐性能不足;而對于外科醫生而言,長時間固定姿態工作占據大多數時間,偶爾需要小幅度行走來調整手術位置,在沒有上半身支撐的環境下,外科醫生頸部、肩部和背部同樣有較高的患病率[14-15],所以對上、下肢段同時提供支撐,將會在外科醫生手術時起到更好的輔助效果。
針對目前存在的問題,為了提高外骨骼對人體全身固定姿態的支撐性能,擴大對人體的支撐范圍,使外科醫生在工作中能長時間穩定支撐,本文依據外科醫生的工作姿態運動特性設計了一款對上、下肢段同時支撐的外骨骼,系統建立了評估外骨骼全身支撐性能的力學模型,并利用有限元分析軟件對外骨骼進行強度校核。為評估外骨骼的支撐性能,本文通過試驗對受試者穿戴外骨骼前后的足底壓力、關節扭矩和關節力、肌肉力和肌肉總體代謝等綜合分析,以期該外骨骼能夠實現全身支撐,減輕外科醫生工作時的肌肉骨骼負擔,減少肌肉、關節損傷風險,更匹配外科醫生的實際工作需求,為醫用支撐外骨骼機構設計提供一種新的范例。
1 外骨骼機構構型及其結構參數
1.1 醫用支撐外骨骼自由度配置
外科醫生手術工作時,外骨骼需要為其提供手術姿態和休息姿態支撐,并能夠小步幅小范圍行走;且手術時,需要外科醫生身體各關節有不同的傾角[16],結合人體運動特征,將外科醫生工作運動抽象為4自由度的關節運動,分別為腰、髖、膝關節的屈曲/伸展和踝關節的跖屈/背屈。利用三維運動捕捉系統Vicon T40–S(Oxford Metrics Ltd.,英國),采集了人體從坐到站以及小步幅行走時的關節角度的變化數據,如圖1所示。
圖1
坐/站周期及步態周期中關節角度變化曲線
Figure1.
Curves of joint angle changes in sit/stand cycle and gait cycle
綜合人體坐/站轉換、行走和支撐時的關節運動角度,可得各關節的運動范圍,如表1所示,可以為外骨骼的機構設計提供理論依據,確保實現預期運動。
1.2 醫用支撐外骨骼機構設計
外骨骼整體結構如圖2所示,由踝、膝、髖關節機構組成。根據中國成年人體尺寸,小腿和大腿的長度調節范圍為372~419 mm和461~493 mm[17]。由于髖、膝、踝三個關節的運動范圍各不相同,需要對各個關節進行不同的機構設計。
圖2
支撐外骨骼整體結構
Figure2.
Overall structure of the supporting exoskeleton
為保證小步幅行走和坐/站轉換過程中外骨骼不阻礙運動,踝關節處采用無源曲柄滑塊機構,如圖3所示,以小腿為曲柄帶動滑塊運動,滑塊前后添加有限位,可實現半蹲姿和坐姿支撐。
圖3
踝關節機構
Figure3.
Mechanism of the ankle joint
傳統膝關節機構一般采用電機或棘輪棘爪形式[18],使轉動副與膝關節轉動中心重合,保證與人體運動一致;但對于支撐型外骨骼,驅動件需要支撐人體全身重量,回轉型驅動件力臂較小,對人體施加的支撐力有限;而采用偏置擺動導桿機構,如圖4所示,以移動副作為驅動,則可以通過增大力臂提高機構的承載能力,再選取電動缸作為驅動使機構能夠在任意位置鎖死并提供支撐。
圖4
膝關節機構
Figure4.
Mechanism of the knee joint
髖關節作為活動角度最大的關節,外骨骼機構的運動范圍需要與之匹配并隨時支撐,即實現大幅度轉動的同時能任意角度鎖死,如圖5所示。在鎖止狀態時拉伸彈簧一端與機架固連,另一端與制動盤轉動連接。拉伸彈簧的拉力使摩擦片與外殼接觸保持鎖止,當上身需要切換姿態時轉動手柄帶動解除制動盤轉動,克服拉伸彈簧的拉力作用使摩擦片與外殼脫離接觸,此時擺桿可以自由轉動。當需要支撐時松開手柄,在拉伸彈簧的拉力作用下自動復位保持鎖止。
圖5
髖關節自鎖機構
Figure5.
Self-locking mechanism of the hip joint
2 外骨骼靜力學分析
2.1 人機靜力學模型
在外科醫生手術過程中,手臂和頭部沒有明顯的相對運動,因此將人體腰關節以上簡化為與人體上肢等質量的連桿。為方便分析,將人體骨盆、大腿、小腿和足部簡化為等質量的連桿,同時將腰、髖、膝、踝關節等效為連桿之間的關節鉸鏈,由此建立穿戴外骨骼后的人體五桿模型[19]。由于人體運動主要發生在矢狀面內,在穿戴外骨骼的情況下,人體五桿模型在矢狀面內的投影和各連桿受力分析如圖6所示[20-22]。
圖6
人機靜力學模型
Figure6.
Man-machine static model
根據簡化的人體五桿模型,建立各肢段的力平衡和扭矩平衡方程,如式(1)~式(5)所示:
|
|
|
|
|
其中,θa、θb、θc分別為踝、膝、髖關節的彎曲角度, G0、G1、G2、G3、G4分別為足部、小腿、大腿、骨盆、上肢軀干的重力,F1x 、F1y、F2x、F2y、F3x、F3y、F4x、F4y和Ma、Mb、Mc、Md分別為踝、膝、髖、腰關節間的相互作用力及關節扭矩。Fb 、Fc、Fd分別為外骨骼對小腿、大腿和上半身的支撐力,Fa1、Fa2分別為地面對前腳掌和后腳掌的力,反映足底壓力的大小和分布情況,d0、d1、d2、d3、d4分別為足部、小腿、大腿、骨盆、上肢軀干的質心到各自轉動關節的距離(例:d2為大腿質心到膝關節的距離),l1、l2、l3分別為小腿、大腿和骨盆的長度,db、dc、dd分別為外骨骼支撐力Fb 、Fc、Fd作用點到各自轉動關節的距離(例:dc為Fc作用點到膝關節的距離),da1、da2分別為前腳掌、后腳掌到踝關節的距離。
方程組式(1)~式(5)共15個獨立方程,其中包含外骨骼和地面對人的5個外力、8個關節力以及4個關節扭矩,共計17個獨立變量。根據足底壓力試驗中采集的相關數據,以Fa1和Fa2為定量,從而使獨立方程數與獨立變量數一致,得到足底壓力與關節扭矩、關節力、外骨骼支撐力的確定關系。當外骨骼支撐力為0時,可以計算出人體穿戴外骨骼前的關節扭矩和關節力。
2.2 外骨骼強度校核
當人體不發力即關節扭矩Ma、Mb、Mc、Md為零時,外骨骼受到的支撐反力最大,對該狀態的外骨骼進行強度分析。為反映外骨骼極限受力情況,對外骨骼坐姿和極限前傾姿態的整體應力和形變分布情況進行分析。根據人機靜力學模型計算支撐反力,坐姿取θa = 86°、θb = 0°、θc=90°,此時人體小腿和上身對外骨骼無作用力,Fc為人體的一半重量,計算得到:Fb = 0 N、Fc = 392 N、Fd = 0 N。極限前傾取θa = 110°、θb = 75°、θc = 135°,計算得到:Fb = 333.7 N、Fc = 257.8 N、Fd = 255.7 N。
將外骨骼模型導入有限元分析軟件ANSYS workbench 19.2(ANSYS Inc.,美國)中,分別添加45鋼、6061鋁、Q235鋼的相關材料參數,將支撐反力分別添加至外骨骼模型相應的受力位置,仿真結果如圖7所示。坐姿和極限前傾姿態支撐時最大應力分別為193.28 MPa、141.16 MPa。由于外骨骼部分構件采用45鋼,滿足材料強度要求。坐姿和極限前傾姿態支撐時最大形變量分別為4.65 mm、5.32 mm,形變較小,證明外骨骼結構強度滿足使用要求,能夠為人體提供安全、可靠的支撐。
圖7
2種姿態下的外骨骼強度分析
Figure7.
Strength analysis of exoskeleton in two postures
3 外骨骼支撐性能評估
3.1 試驗設計
試驗自變量是4種不同的支撐姿態:膝關節分別彎曲50°、60°、70°以及坐姿。受試者分別在有、無外骨骼狀態下進行支撐并模擬醫生手術動作。足底壓力采集硬件系統如圖8所示,由個人計算機(personal computer,PC)、數據采集卡、電壓轉換模塊和薄膜壓力傳感器組成。其中,壓力傳感器選用DF9-16薄膜柔性壓力傳感器(Leanstar Ltd.,中國),量程為0~100 N。數據采集卡采用SUB-6216(National Instruments Inc.,美國),該模塊提供16路模擬輸入,每個通道可編程輸入范圍為:± 0.2~± 10 V。
圖8
足底壓力硬件系統
Figure8.
Plantar pressure hardware system
本試驗招募了7名健康男性作為受試者,身高在168~183 cm之間,體重在55~80 kg之間,年齡在23~27歲。試驗采集地為河北工業大學機器人感知與人機融合重點實驗室。受試者均自愿參加試驗,并簽署了試驗知情同意書,本研究通過了河北工業大學倫理委員會的審批(批文編號:HEBUThMEC2020007)。如圖9所示,展示了受試者穿戴外骨骼后4種不同的支撐姿態。
圖9
受試者4種不同的支撐姿態
Figure9.
Four different supporting postures of the subject
3.2 足底壓力分析
受試者在不穿戴外骨骼時,不同姿態下足底壓力值差異不具有統計學意義,因此對不同姿態下不穿戴外骨骼的足底壓力相加取平均值。4種姿態下穿戴外骨骼前后的足底壓力情況如圖10所示,其中β表示膝關節彎曲角度。
圖10
不同姿態模擬任務時的足底壓力
Figure10.
Plantar reaction in simulation tasks with different postures
當受試者穿戴外骨骼在4種支撐姿態下進行支撐時,相較于未穿戴外骨骼,足底壓力均有所降低,降低程度最高可達85.92%,表明外骨骼可以支撐人體部分體重,能有效降低醫生的疲勞感。
3.3 關節力和關節扭矩分析
根據式(1)~式(5)并結合足底壓力數據,可以得到受試者穿戴外骨骼前后的關節扭矩和關節力,如圖11所示。
圖11
膝關節彎曲50°、60°、70°時的關節扭矩和關節力
Figure11.
Joint torques and joint forces at knee flexion of 50°、60° 、70°
結果顯示,受試者在穿戴外骨骼時的腰、髖關節扭矩降低程度更明顯,隨膝關節彎曲角度增加,降低程度在52.33%~96.96%和49.78%~98.01%范圍內變化。此外,受試者在穿戴外骨骼的3種支撐姿態下的髖、膝、踝關節力也均有不同程度的降低,表明外骨骼有減少部分關節負擔的效果,可降低關節損傷的風險。
3.4 肌肉力和肌肉總體代謝分析
在生物力學仿真軟件Opensim 4.3(Stanford University,美國)中導入由三維運動捕捉系統Vicon T40-S(Oxford Metrics Ltd.,英國)試驗得到的標記點參數和人體參數,對人體模型進行縮放和逆運動學計算[23];然后導入足底壓力數據,通過逆動力學計算得到各個關節的關節扭矩;最后通過殘差縮減和肌肉控制計算求解出穿戴外骨骼前后的肌肉力和肌肉總體代謝情況[24]。仿真結果如圖12所示,其中β表示膝關節彎曲角度。
圖12
膝關節彎曲50°、70°時的肌肉力及肌肉總體代謝
Figure12.
Muscle forces and total muscle metabolism at knee flexion of 50 °、70 °
受試者在穿戴外骨骼的2種支撐姿態下的肌肉總體代謝有所降低,其中,主要發力肌肉豎脊肌、股外側肌的激活程度有所降低,降低范圍在48.89%~93.49%和39.86%~63.87%之間,該肌肉群分布在腰部和大腿,表明外骨骼對大腿和腰部的省力效果明顯。
4 總結
本文針對需要長時間站立或半蹲姿的外科手術醫生易患肌肉骨骼疾病的特點,以延長外科手術醫生的職業壽命為目的,通過研究外科醫生不同工作姿態的關節運動范圍,圍繞各個關節進行構型分析,設計了一種具有多關節機構的輔助支撐外骨骼,實現了多種姿態下的全身支撐。本文基于人體腰、髖、膝、踝在矢狀面的自由度分析,將人體簡化為剛性五桿模型,建立人機靜力學模型,得到足底壓力與關節扭矩、關節力的關系。本文還通過足底壓力試驗證實,受試者穿戴外骨骼后足底壓力顯著降低,表明外骨骼能支撐部分體重,有效降低醫生的疲勞感。將足底壓力帶入靜力學模型計算得到關節扭矩和關節力,結果顯示外骨骼可降低大部分關節的關節扭矩和關節力,有效降低關節損傷的風險。通過分析Opensim4.3(Stanford University,美國)的仿真結果,進一步驗證了外骨骼能有效降低肌肉總體代謝和主要發力肌肉的激活程度,說明外骨骼可以緩解肌肉疲勞,提高工作效率。本課題組將該外骨骼與其他外骨骼進行大致對比,結果如附表1所示,本文的外骨骼從3項指標全面評估了外骨骼的支撐性能;以肌肉力減少為例,其他外骨骼對小腿肌肉省力效果明顯,而本文的外骨骼對大腿和腰部肌肉省力效果明顯;由于外科手術醫生易患的肌肉骨骼疾病大多集中在腰部和髖部[2-3],證明該外骨骼對外科手術醫生患病類型更具有針對性。
重要聲明
利益沖突聲明:本文全體作者均聲明不存在利益沖突。
作者貢獻聲明:戚開誠負責項目主持、試驗流程與指導、機構構型設計;尹智揚負責仿真數據分析、論文編寫;張建軍負責數據分析指導、論文審閱修訂;宋井科、喬高昆負責仿真工作指導、實體樣機設計。
倫理聲明:本研究通過了河北工業大學倫理委員會的審批(批文編號:HEBUThMEC2020007)。