阿爾茲海默癥(AD)是一種常見且危害嚴重的老年癡呆病,但對其早期輕度認知障礙的檢測與治療有助于減緩癡呆癥的進展。近年來有研究表明認知功能與運動功能和步態異常之間存在關系。本研究從國家康復輔具研究中心附屬康復醫院招募了302例受試者,按照納入與排除標準最終納入193例受試者,其中137例為輕度認知障礙患者(MCI),56例為健康對照者(HC)。使用可穿戴設備采集參與者在單任務(自由行走)、雙任務(倒數100)時的步態參數。將步態周期、運動學參數、時間-空間參數等步態參數作為研究重點,使用遞歸特征消除法(RFE)選擇重要特征,將受試者的MoCA分數作為響應變量,建立了一種基于步態特征量化評估認知水平的機器學習模型。研究結果顯示,足趾離地角度和足跟著地角度這兩種時間-空間參數作為評估認知水平的標志物具有重要臨床意義,未來或對預防或延緩AD的發生具有重要的臨床應用價值。
引用本文: 陶帥, 胡泓彬, 孔麗文, 呂澤平, 汪祖民, 趙潔, 劉爽. 基于步態特征的認知障礙量化評估方法研究. 生物醫學工程學雜志, 2024, 41(2): 281-287. doi: 10.7507/1001-5515.202305019 復制
版權信息: ?四川大學華西醫院華西期刊社《生物醫學工程學雜志》版權所有,未經授權不得轉載、改編
0 引言
阿爾茲海默癥(Alzheimer’s disease,AD)作為常見的老年癡呆疾病,危害度高且無法治愈。在被稱為輕度認知障礙(mild cognitive impairment,MCI)的AD早期,患者還可以從事復雜的活動,但在AD晚期,認知相關的損傷可能會導致患者日常生活困難[1]。盡管癡呆癥被認為是不可治愈的,但對癡呆癥的早期治療有助于減緩其進展[2]。因此,盡早確診MCI對于治療癡呆癥意義重大。傳統檢測認知水平的方法主要是采用筆試的方式篩查癡呆癥,如迷你精神狀態檢查(Mini-Mental State Examination,MMSE)[3]、蒙特利爾認知評估(Montreal Cognitive Assessment,MoCA)[4]。近年來有研究表明整體認知功能與運動功能和步態異常之間存在關系[5]。人工智能和可穿戴傳感技術的出現使得精確的步態分析成為可能。許多研究人員使用機器學習技術(machine learning,ML)結合步態分析對老年人的認知水平進行評估。Wu等[6]使用Kinect設備收集受試者原地踏步時計算的反應時間和步態特征,對低認知水平的受試者進行預測。Jung等[7]利用步態序列特征和長-短期記憶網絡對有認知障礙患者的認知風險進行預測。Saho等[8]使用微多普勒雷達測量患者腿部和步態速度數據,利用支持向量機(support vector machine,SVM)對患者的認知風險進行分類預測。Noh等[9]提出了一種基于單任務步態參數和身體素質測試特征,使用機器學習模型預測受試者的認知水平。Matsuura等[10]使用單、雙任務步態參數結合統計學和機器學習算法預測患者的認知水平。這些研究或是沒有對受試者的認知水平進行定量預測,或是將步態特征以外的特征作為研究的重點,沒有深入研究各種步態特征和認知水平之間的關系。本研究以MCI患者和正常人為研究對象,將步態周期、運動學參數、時間-空間參數等步態參數作為研究重點,篩選出重要特征組合并建立能夠準確預測認知水平的機器學習模型,并研究了這些特征與認知水平的量化關系。
1 對象和方法
1.1 研究對象
2018年9月至2022年12月,從國家康復輔具研究中心附屬康復醫院招募了302例受試者,按照納入與排除標準最終納入193例受試者,其中137例為MCI患者,56例為健康對照者(healthy control,HC),本研究獲得了國家康復輔具研究中心附屬康復醫院研究倫理委員會的倫理學批準(審批號:S20220226),并在入組時獲得參與者的書面知情同意書。
1.2 研究方法
1.2.1 認知評估測試
我們采用“面對面”訪談的方式收集參與者的基本情況,包括年齡、身高、體重。采用MoCA量表評估受試者的整體認知功能,使用臨床癡呆評定量表(Clinical Dementia Rating,CDR)量表評估認知受損程度。認知域的評估包括記憶力、執行能力、注意力和語言評估,評估方法分別為聽覺詞語學習測驗、Stroop色詞測驗[11]。使用日常生活活動評估量表評估患者在日常生活中的自我護理能力[12],從193位患者中收集了1 325條樣本。
1.2.2 步態數據采集
本實驗采用吉步恩?步態檢測系統[13-14],所有步態測試均是在國家康復輔具研究中心附屬康復醫院寬敞走廊內完成。參與者需完成兩組步態測試:一項是單任務測試,另一項為雙任務測試,且行走距離均不少于10 m。在單任務階段,參與者只需以自我舒適的速度自然行走,無需執行其他附加行為;而在雙任務階段,則是在平坦地面上實施“倒數100”的實驗,即受試者在行走時同步從數字100開始遞減計數,例如,100、99、98······。
1.2.3 步態參數
無論是單任務還是雙任務的步態測試,系統都將獲取相同的一系列步態參數數據,包括但不限于步幅、步行速度、步頻、支撐相時間、擺動相時間、跨步周期、支撐階段持續時間、擺動階段持續時間、足趾離地角度和足跟著地角度等關鍵指標。在此基礎上,我們進一步計算了各維度步態參數的不對稱系數[15]以及雙任務步態消耗[16],并結合受試者的生物統計信息如身高、體重和鞋碼等11個特征,形成共計51個維度的綜合參數,步態參數的說明如表1所示。
1.3 特征選擇和回歸建模
本實驗將這51個綜合參數作為預測變量,為避免特征之間量綱的差距,所有數據在輸入前均進行過標準化。采用遞歸特征消除方法(recursive feature elimination,RFE)[17]篩選各模型的最優特征組合,從而對數據集進行降維。為了評估模型的預測性能和誤差,我們將預測值和真實值的均方根誤差(root mean square error,RMSE)作為誤差指數。使用Lasso回歸(least absolute shrinkage and selection operator)、彈性網(elastic net,ElasticNet)、SVM、隨機森林算法(random forest,RF)、自適應提升算法(adaptive boosting,Adaboost)和梯度提升決策樹算法(gradient boosting decision tree,GBDT)分別建立回歸模型。
SVM是一種廣泛應用于統計學習與機器學習領域的監督模型,善于構建具有出色泛化能力的決策邊界[18]。RF又稱為自助式集成決策樹,本質上是一種包含了多個決策樹的集合模型,在構建每棵決策樹時會隨機抽取部分特征和樣本數據[19],相較于單一決策樹,隨機森林由多個決策樹構成,能有效緩解過擬合問題。Lasso巧妙地融合了變量篩選和稀疏約束機制,在傳統最小二乘回歸的框架內增加了一個L1正則化懲罰項,以優化特征選取和參數估計過程。ElasticNet是一種結合了L1和L2正則化的線性模型優化算法[20]。Adaboost是一種迭代算法,其核心思想是針對同一個訓練集訓練不同的分類器(弱分類器),然后把這些弱分類器集合起來,構成一個更強的最終分類器[21]。GBDT是一種基于迭代機制構建的決策樹群算法,其最終預測結果由多個決策樹輸出累加生成,因其強大的泛化性能而備受青睞[22],其基本思路是將一系列較弱的基礎模型逐步疊加成為一個整體上較強的復合模型[23]。
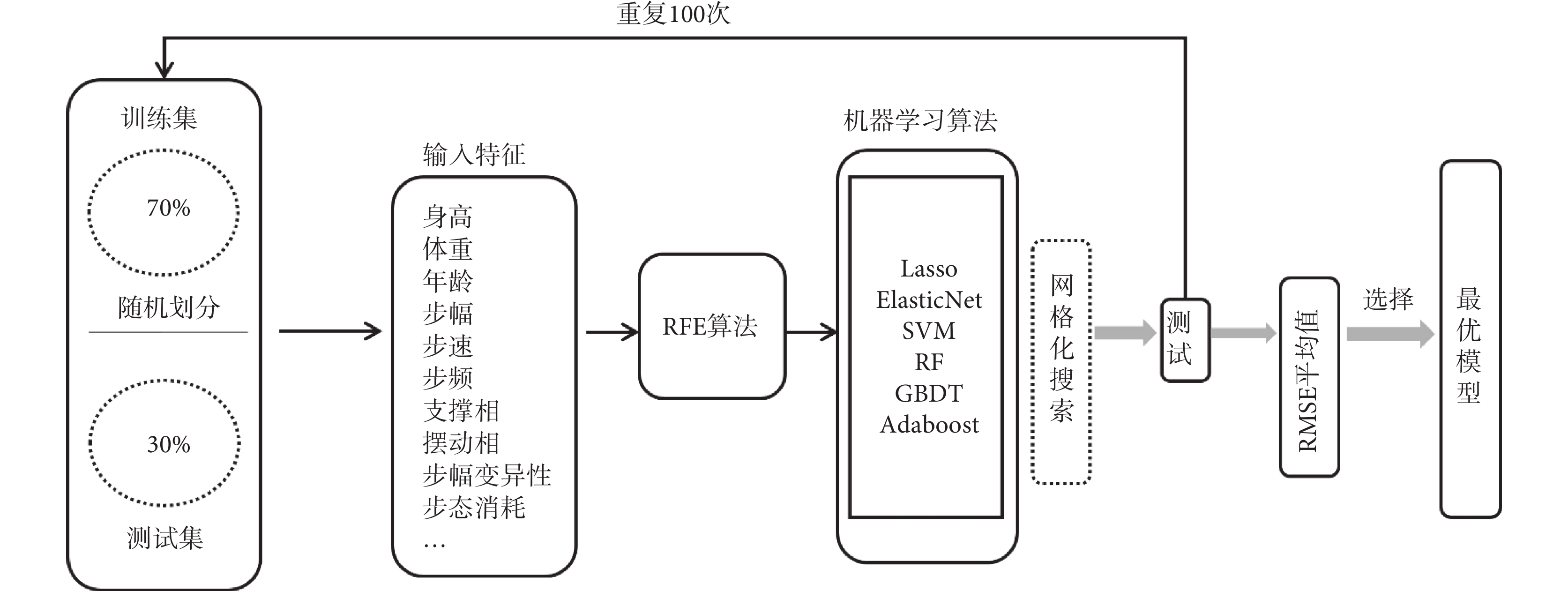
在模型訓練過程中,我們按照7∶3的比例將數據集隨機劃分為訓練集和驗證集,并使用十折交叉驗證以確保模型的泛化能力,使用網格化搜索尋找模型的最優超參數。為了進一步提高模型的穩定性和可靠性,我們進行了100次實驗,每次實驗都隨機劃分訓練集和測試集。最后,我們將100次實驗的測試結果進行平均處理,以獲取更為準確和可靠的誤差評估。通過這一系列嚴謹的數據處理和模型訓練步驟,我們成功地選出了具有最小誤差的最優模型。模型訓練流程如圖1所示。
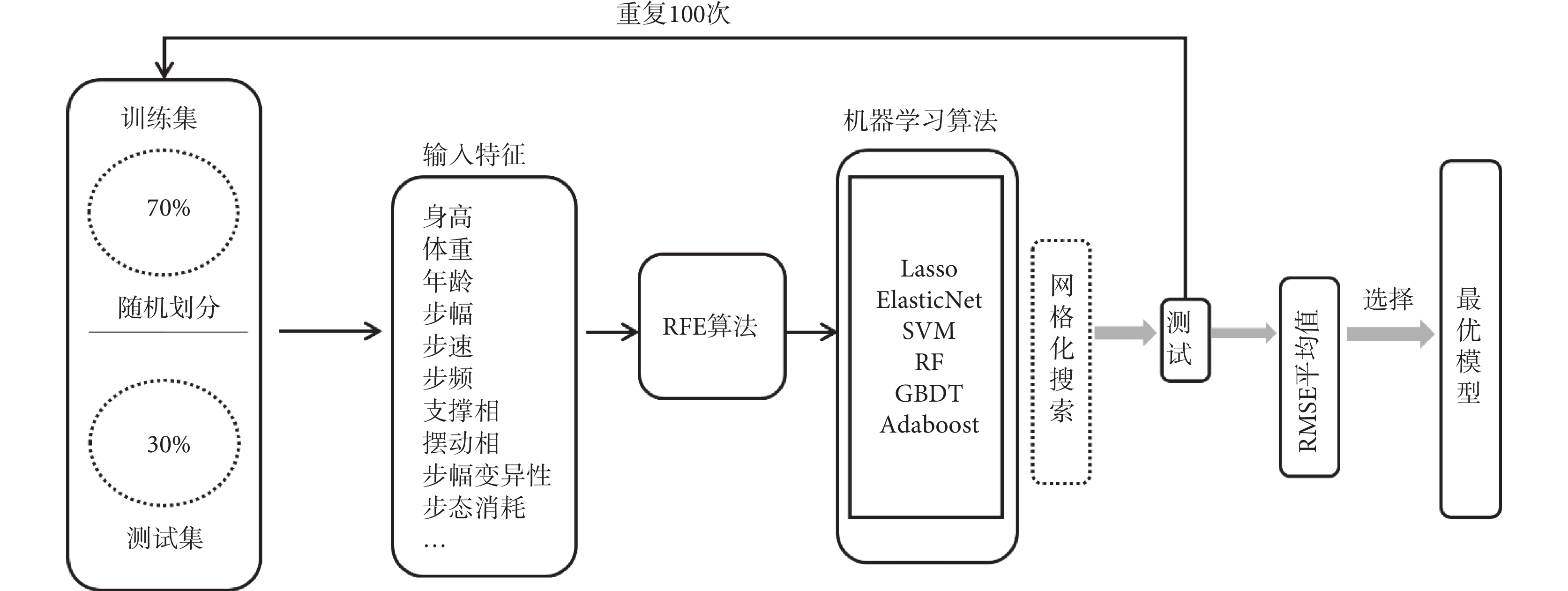 圖1
模型訓練流程圖
Figure1.
Model training flowchart
圖1
模型訓練流程圖
Figure1.
Model training flowchart
2 結果
2.1 特征選擇結果
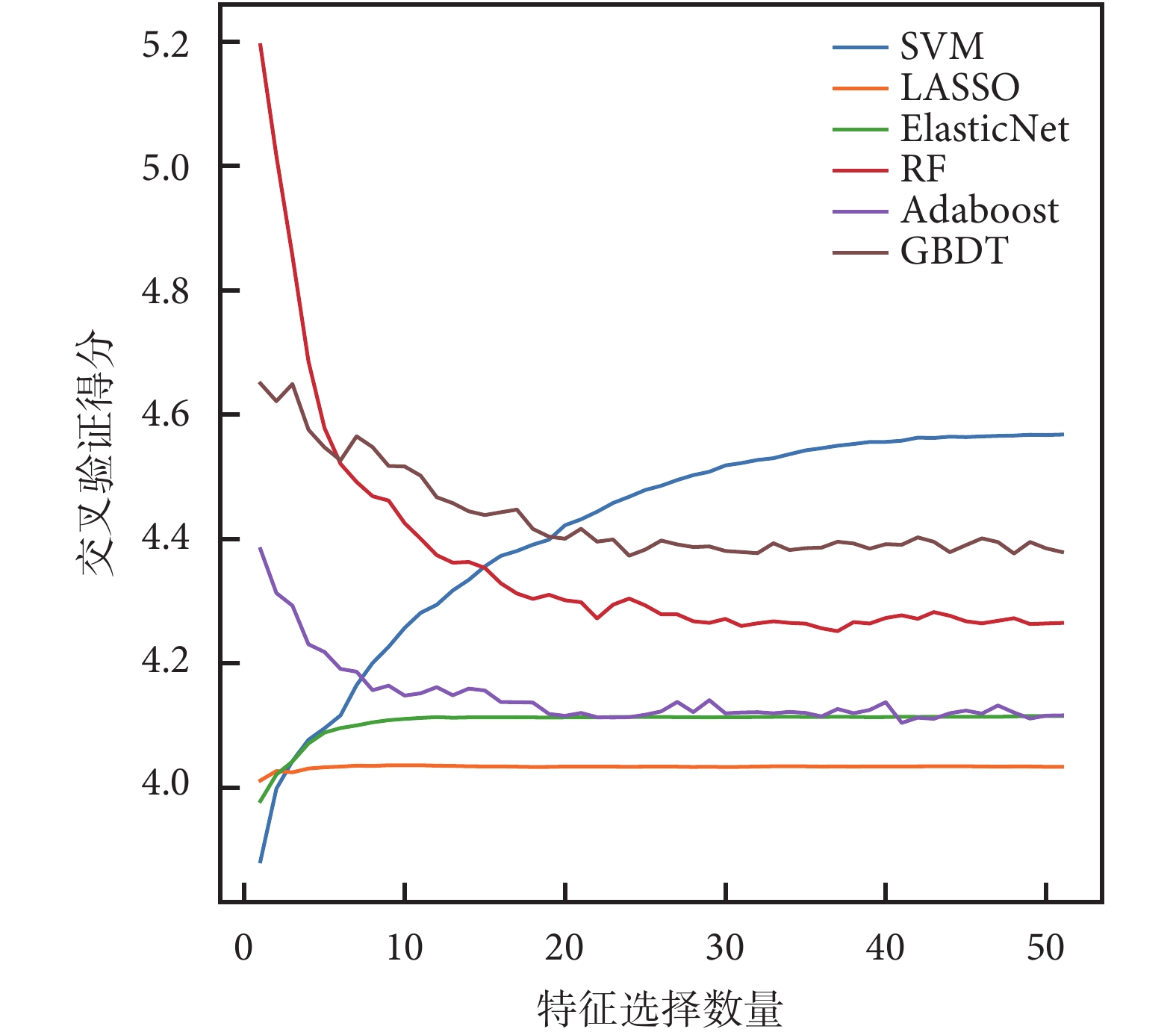
各機器學習模型進行特征組合選擇的累積特征數如圖2所示。從圖2中可以看出Lasso和ElasticNet這兩種線性回歸模型的變化程度相對較小,特征數量對它們的影響并不明顯。這可能是因為線性回歸模型處理高維數據的能力不足,如果維度過多則會使模型難以擬合,反而會將其中某幾個特征作為重點而忽略其他的特征。SVM選擇的最優特征數量較少,而且在達到最佳特征選擇后,SVM的均方根誤差RMSE隨特征數量的增加而增加。這說明SVM處理高維數據的能力也不理想。RF、Adaboost和GBDT這三種集成學習模型較為類似,總的來看,它們的RMSE隨特征數量的增加而降低,這意味著集成學習模型能夠考慮更多維度的信息,也更有潛力做出準確的預測。
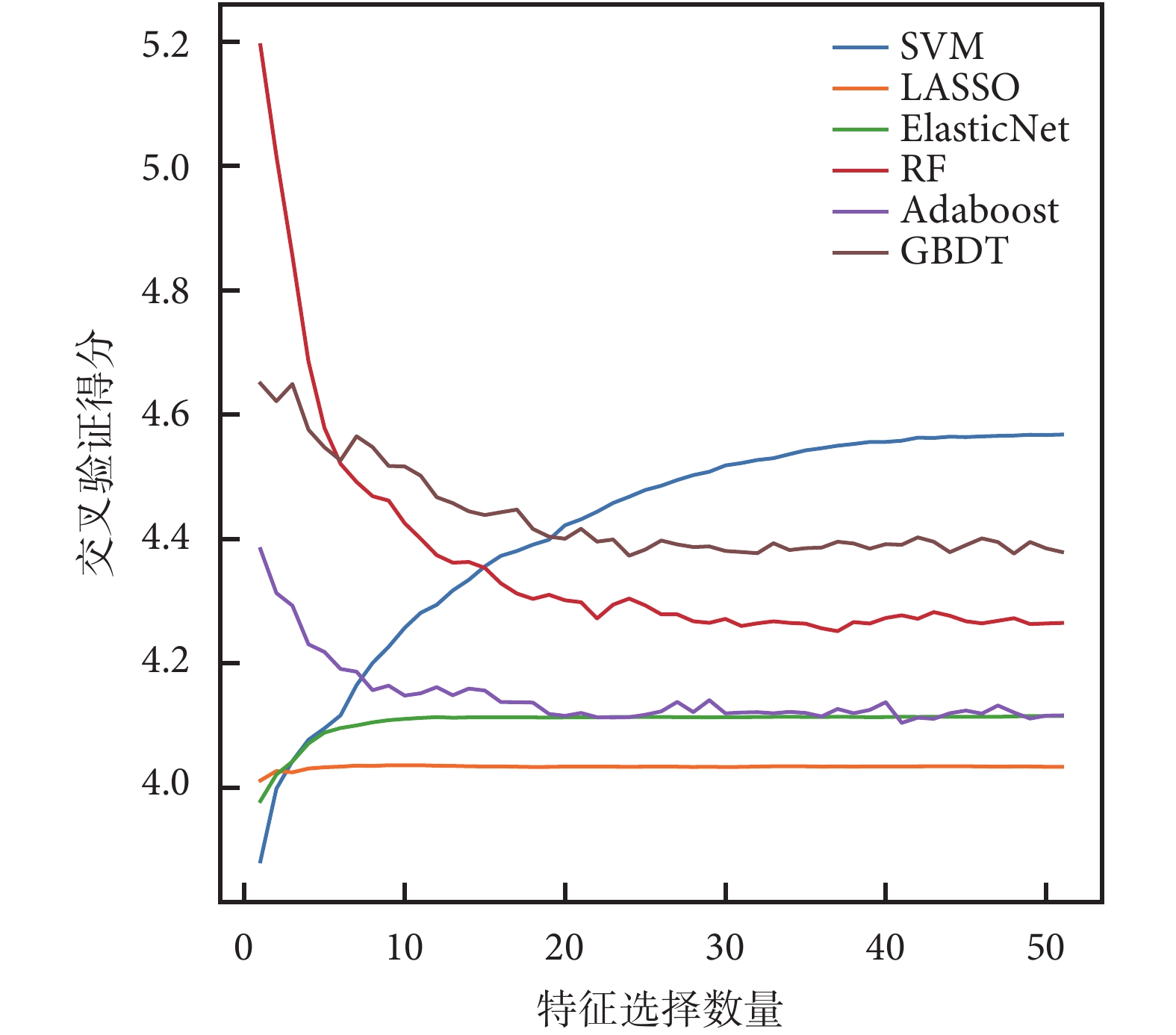 圖2
機器學習模型特征選擇結果
Figure2.
Machine learning model feature selection results
圖2
機器學習模型特征選擇結果
Figure2.
Machine learning model feature selection results
2.2 機器學習模型訓練結果
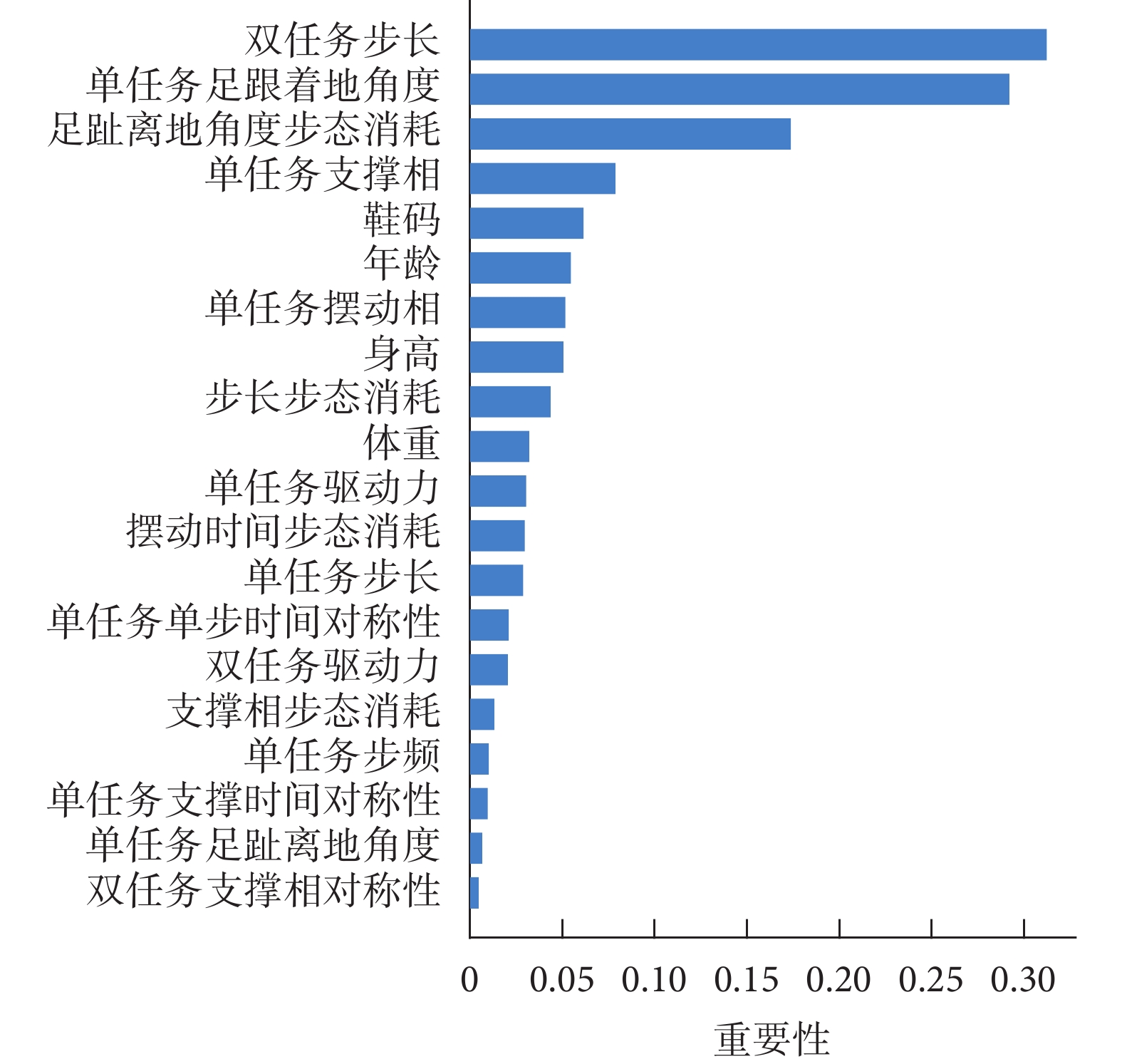
隨后我們將每個模型的最佳特征組合作為輸入,進行了網格化搜索,選擇最優參數。表2列出了各機器學習模型的RMSE統計學數據和各模型最佳特征組合的特征數。從表中可以看出,Lasso、ElasticNet、SVM這三種模型選擇的特征數很少,這可能與它們都采用了線性回歸有關。RF、Adaboost和GBDT這三種模型都選擇了較多的特征,GBDT選擇了最多的特征(44個)。ElasticNet的MoCA分數RMSE均值最小,為3.759,Lasso和RF的均值與ElasticNet較為接近。
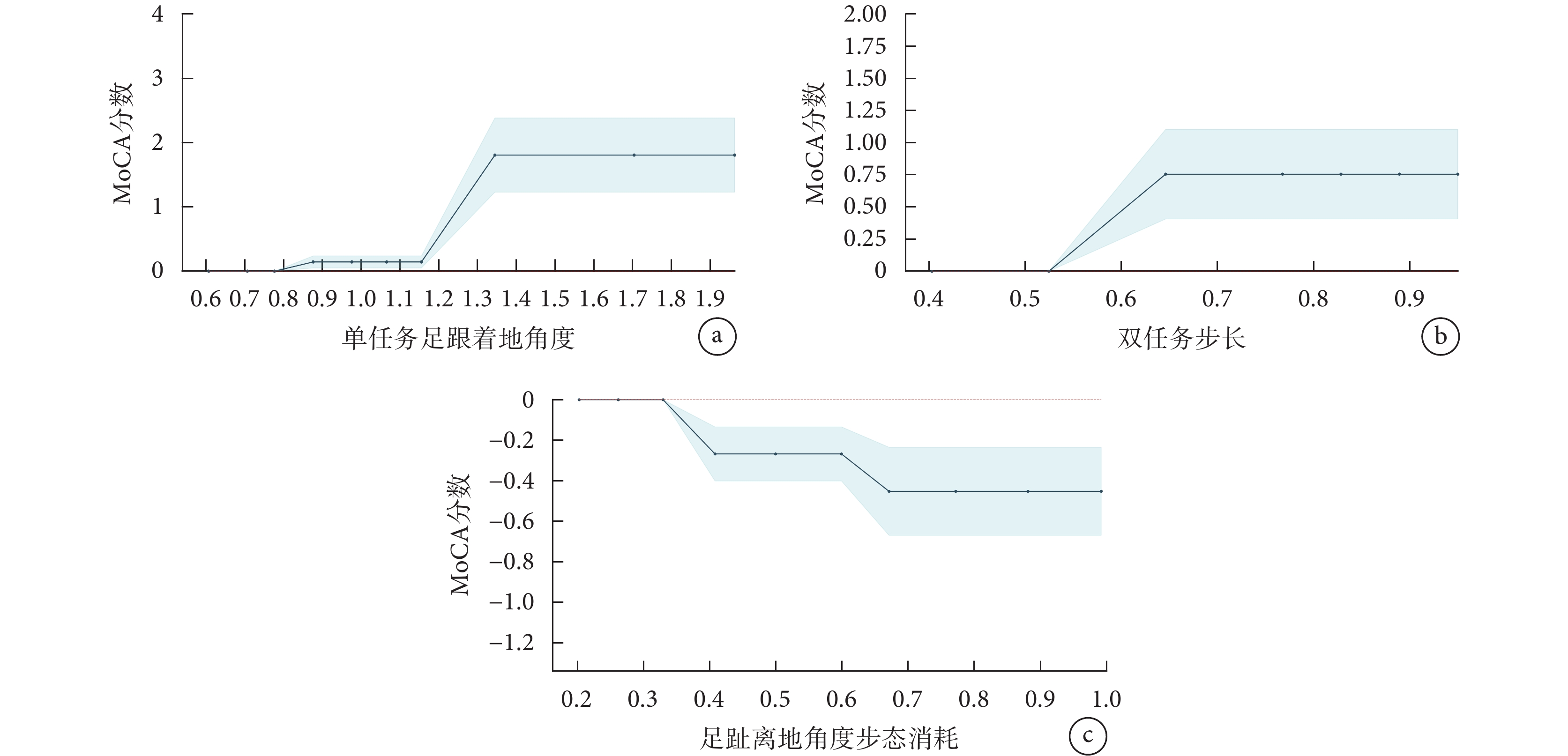
綜合來看,我們使用RF來做進一步研究。圖3給出了RF模型的步態特征重要性排名的前20位,從圖3中可以看出排名前三位的特征是雙任務步長、單任務足跟著地角度和足趾離地角度步態消耗。圖4顯示了這三個步態特征的部份依賴圖(partial dependence plots,PDP),每個圖中的藍色區域顯示置信區間。從圖4a中可以看出單任務足跟著地角度在1.15~1.35之間與預測分數線性正相關,而在其他值域幾乎對預測不起任何作用。從圖4b中可以看出雙任務步長在0.52~0.65之間與預測分數線性正相關,而在其他值域幾乎對預測不起任何作用。從圖4c中可以看足趾離地角度步態消耗在0.32~0.41之間和0.6~0.68之間與預測分數線性負相關,而在其他值域幾乎對預測不起任何作用。
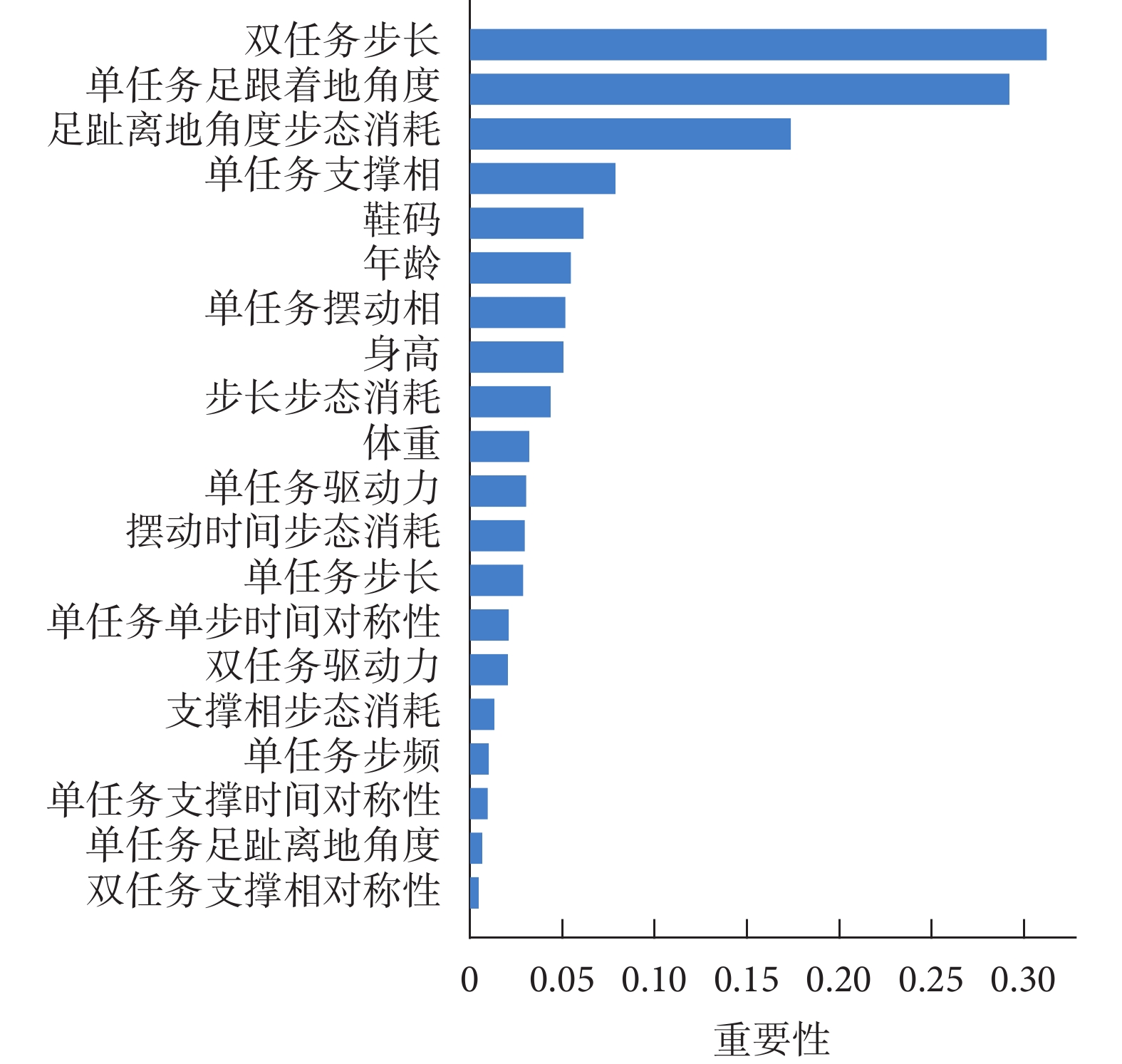 圖3
步態特征重要性排名(前20名)
Figure3.
Ranking of gait feature importance (top 20)
圖3
步態特征重要性排名(前20名)
Figure3.
Ranking of gait feature importance (top 20)
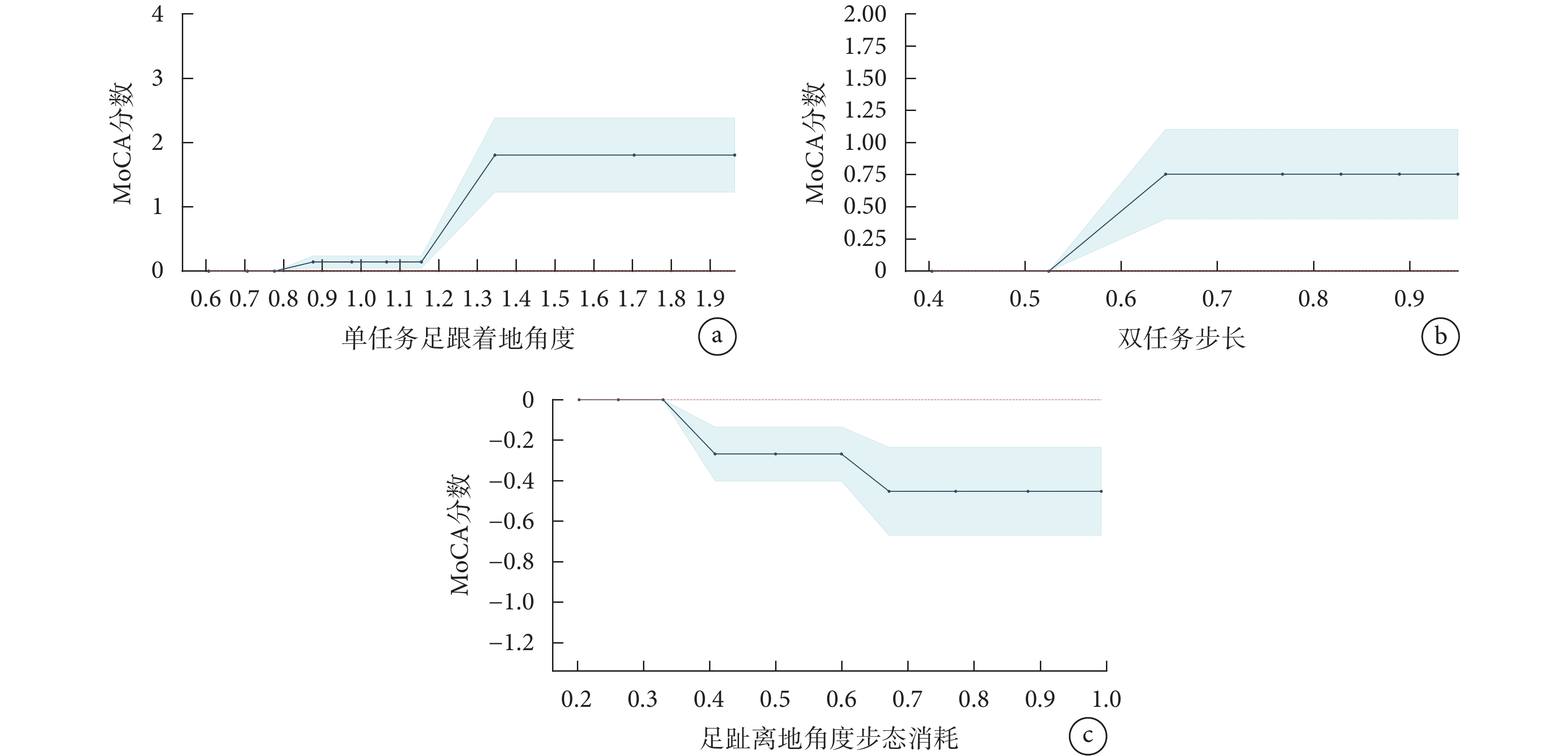 圖4
重點步態特征部份依賴關系圖
圖4
重點步態特征部份依賴關系圖
a. 單任務足跟著地角度;b. 雙任務步長;c. 足趾離地角度步態消耗
Figure4. PDP of key gait featuresa. single-task heel strike; b. dual-task step; c. toe-off gait cost
3 討論
之前有研究表明,有認知障礙者和健康人群的步態周期和運動學參數的差異具有統計學意義[24]。近年來也有研究表明足趾離地角度和足跟著地角度可能是區分有步態障礙者的重要特征[25],有研究者將這兩種特征用于區分卒中后癡呆和AD[26]。但是在研究步態特征與認知水平具體關系時,很少見到將足趾離地角度、足跟著地角度作為量化評估認知的因素。我們團隊過往研究顯示,足趾離地角度和足跟著地角度在不同認知水平的人群間有顯著差異,可以作為區分HC、MCI和AD的特征。
在本研究中,步態周期、運動學參數和時間-空間參數都作為模型的輸入被納入研究范圍,并重點對時間-空間參數與受試者具體認知水平的關系進行了研究。我們發現機器學習算法給出的貢獻度排名中,單任務足跟著地角度和足趾離地角度步態消耗這兩種時間-空間參數排名都非常靠前。在過往的研究中,雙任務行走已經被證明可以影響MCI患者的步態參數[27],并且在區分MCI或AD的分類任務中雙任務步態參數的貢獻度往往大于單任務步態參數[28]。本實驗中雙任務步長這一特征排在了貢獻度最高的位置,這也與之前的結論相符,即認知水平較高的的受試者在執行雙任務時往往比認知水平低的受試者有更長的步長[24]。但是,單任務足跟著地角度重要性也排在較高的位置,并高于雙任務足跟著地角度,這一結果有些意外。這可能是因為,認知水平越低的受試者更容易“拖步”。有研究表明足跟著地角度是反映“拖步”的最好指標[29],由于低認知水平的受試者在執行任務時容易“拖步”,他們的足跟著地角度本來就小,這導致他們的雙任務足跟著地角度和單任務足跟著地角度相比下降的并不多。而其他認知水平的受試者在執行雙任務時足跟著地角度相較于單任務足跟著地角度都有不同程度的下降,這使得雙任務足跟著地角度這一特征在不同認知水平受試者之間的差異不大,因此機器學習模型更關注單任務足跟著地角度這一特征。同時從單任務足跟著地角度排名靠前可以看出,這一特征甚至比大部分的雙任務特征更能反映受試者當前的認知水平。有研究表明足跟著地角度的減少意味著患者的足部廓清能力的損害,進而會導致跌倒的發生[30]。但單任務足跟著地角度是否在任何條件下都優于其他特征這需要在未來進行更深入的研究。此外,足趾離地角度的步態消耗這一特征也排在靠前的位置上,并且從足趾離地角度步態消耗的PDP圖上可以看出,擁有較大步態消耗的受試者往往具有較低的MoCA值,這說明MCI這類認知水平較低的受試者在執行雙任務時會受到較大的影響,因此他們的雙任務步態消耗較大,而認知水平較高的正常受試者執行雙任務受到的影響小,會有更小的步態消耗。足趾離地角度步態消耗的重要性領先于其他特征的步態消耗,這說明足趾離地角度很有可能是雙任務中變化更明顯的步態特征。以后的研究要更加重視這一特征。此外,之前的大部分研究是做分類預測,并不需要給出受試者精準的認知水平預測,因此機器學習算法只需要關注三種認知水平的受試者之間有顯著差異的特征即可,而這些特征在同一組認知水平的受試者中可能并沒有顯著的區別。但本實驗是為了預測受試者的認知水平,由于預測分數是連續的,機器學習模型就會更關注在不同認知分數上有不同變化的特征,本組結果說明雙任務步長、單任務足跟著地角度、足趾離地角度步態消耗這三個特征與受試者具體的認知水平相關性更強,這為MCI早期篩查提供了新的思路。近年來,有關MCI和AD患者的步態障礙研究越來越多,通過機器學習技術建立回歸模型可以幫助臨床醫生更快更方便地檢測患者的認知水平,為早期治療提供更多的支持。
本研究仍存在一些局限性:① 研究比較了部分線性回歸模型和集成學習模型,將來可以考慮使用深度學習進行試驗,如長短期記憶網絡、卷積神經網絡等。② 本研究所納入患者的樣本量依然有限,HC和MCI兩種受試者的數量也并不平衡,尤其是MoCA值極低和極高的樣本數量較少,可能會影響機器學習模型的準確性和泛化能力;③ 本研究采集的參數僅為受試者一次試驗的結果,難以發現與受試者認知水平變化相關的參數,未來可以按一定周期定時檢測患者的認知水平,以尋找與認知水平下降相關的步態參數。
綜上,本研究發現,可穿戴設備收集的步態數據可以作為預測認知水平的臨床工具,使用機器學習算法結合步態參數可以量化預測認知水平。雙任務步長、單任務足跟著地角度和足趾離地角度步態消耗是預測受試者認知水平的重要步態標志物,未來對預防或延緩AD的發生有重要的臨床應用價值。
重要聲明
利益沖突聲明:本文全體作者均聲明不存在利益沖突。
作者貢獻聲明:陶帥:提出主要研究目標,負責研究的構思與設計;胡泓彬:負責研究的實施,撰寫論文;孔麗文:進行數據的收集與整理;呂澤平:負責調查開展、概念提出、醞釀實驗;汪祖民:負責可視化、審查和寫作;趙潔:負責文章的質量控制與審查,以及論文的修訂;劉爽:負責文章整體的監督管理。
倫理聲明:本研究通過了國家康復輔具研究中心附屬康復醫院研究倫理委員會的審批(批文編號:S20220226)。
0 引言
阿爾茲海默癥(Alzheimer’s disease,AD)作為常見的老年癡呆疾病,危害度高且無法治愈。在被稱為輕度認知障礙(mild cognitive impairment,MCI)的AD早期,患者還可以從事復雜的活動,但在AD晚期,認知相關的損傷可能會導致患者日常生活困難[1]。盡管癡呆癥被認為是不可治愈的,但對癡呆癥的早期治療有助于減緩其進展[2]。因此,盡早確診MCI對于治療癡呆癥意義重大。傳統檢測認知水平的方法主要是采用筆試的方式篩查癡呆癥,如迷你精神狀態檢查(Mini-Mental State Examination,MMSE)[3]、蒙特利爾認知評估(Montreal Cognitive Assessment,MoCA)[4]。近年來有研究表明整體認知功能與運動功能和步態異常之間存在關系[5]。人工智能和可穿戴傳感技術的出現使得精確的步態分析成為可能。許多研究人員使用機器學習技術(machine learning,ML)結合步態分析對老年人的認知水平進行評估。Wu等[6]使用Kinect設備收集受試者原地踏步時計算的反應時間和步態特征,對低認知水平的受試者進行預測。Jung等[7]利用步態序列特征和長-短期記憶網絡對有認知障礙患者的認知風險進行預測。Saho等[8]使用微多普勒雷達測量患者腿部和步態速度數據,利用支持向量機(support vector machine,SVM)對患者的認知風險進行分類預測。Noh等[9]提出了一種基于單任務步態參數和身體素質測試特征,使用機器學習模型預測受試者的認知水平。Matsuura等[10]使用單、雙任務步態參數結合統計學和機器學習算法預測患者的認知水平。這些研究或是沒有對受試者的認知水平進行定量預測,或是將步態特征以外的特征作為研究的重點,沒有深入研究各種步態特征和認知水平之間的關系。本研究以MCI患者和正常人為研究對象,將步態周期、運動學參數、時間-空間參數等步態參數作為研究重點,篩選出重要特征組合并建立能夠準確預測認知水平的機器學習模型,并研究了這些特征與認知水平的量化關系。
1 對象和方法
1.1 研究對象
2018年9月至2022年12月,從國家康復輔具研究中心附屬康復醫院招募了302例受試者,按照納入與排除標準最終納入193例受試者,其中137例為MCI患者,56例為健康對照者(healthy control,HC),本研究獲得了國家康復輔具研究中心附屬康復醫院研究倫理委員會的倫理學批準(審批號:S20220226),并在入組時獲得參與者的書面知情同意書。
1.2 研究方法
1.2.1 認知評估測試
我們采用“面對面”訪談的方式收集參與者的基本情況,包括年齡、身高、體重。采用MoCA量表評估受試者的整體認知功能,使用臨床癡呆評定量表(Clinical Dementia Rating,CDR)量表評估認知受損程度。認知域的評估包括記憶力、執行能力、注意力和語言評估,評估方法分別為聽覺詞語學習測驗、Stroop色詞測驗[11]。使用日常生活活動評估量表評估患者在日常生活中的自我護理能力[12],從193位患者中收集了1 325條樣本。
1.2.2 步態數據采集
本實驗采用吉步恩?步態檢測系統[13-14],所有步態測試均是在國家康復輔具研究中心附屬康復醫院寬敞走廊內完成。參與者需完成兩組步態測試:一項是單任務測試,另一項為雙任務測試,且行走距離均不少于10 m。在單任務階段,參與者只需以自我舒適的速度自然行走,無需執行其他附加行為;而在雙任務階段,則是在平坦地面上實施“倒數100”的實驗,即受試者在行走時同步從數字100開始遞減計數,例如,100、99、98······。
1.2.3 步態參數
無論是單任務還是雙任務的步態測試,系統都將獲取相同的一系列步態參數數據,包括但不限于步幅、步行速度、步頻、支撐相時間、擺動相時間、跨步周期、支撐階段持續時間、擺動階段持續時間、足趾離地角度和足跟著地角度等關鍵指標。在此基礎上,我們進一步計算了各維度步態參數的不對稱系數[15]以及雙任務步態消耗[16],并結合受試者的生物統計信息如身高、體重和鞋碼等11個特征,形成共計51個維度的綜合參數,步態參數的說明如表1所示。
1.3 特征選擇和回歸建模
本實驗將這51個綜合參數作為預測變量,為避免特征之間量綱的差距,所有數據在輸入前均進行過標準化。采用遞歸特征消除方法(recursive feature elimination,RFE)[17]篩選各模型的最優特征組合,從而對數據集進行降維。為了評估模型的預測性能和誤差,我們將預測值和真實值的均方根誤差(root mean square error,RMSE)作為誤差指數。使用Lasso回歸(least absolute shrinkage and selection operator)、彈性網(elastic net,ElasticNet)、SVM、隨機森林算法(random forest,RF)、自適應提升算法(adaptive boosting,Adaboost)和梯度提升決策樹算法(gradient boosting decision tree,GBDT)分別建立回歸模型。
SVM是一種廣泛應用于統計學習與機器學習領域的監督模型,善于構建具有出色泛化能力的決策邊界[18]。RF又稱為自助式集成決策樹,本質上是一種包含了多個決策樹的集合模型,在構建每棵決策樹時會隨機抽取部分特征和樣本數據[19],相較于單一決策樹,隨機森林由多個決策樹構成,能有效緩解過擬合問題。Lasso巧妙地融合了變量篩選和稀疏約束機制,在傳統最小二乘回歸的框架內增加了一個L1正則化懲罰項,以優化特征選取和參數估計過程。ElasticNet是一種結合了L1和L2正則化的線性模型優化算法[20]。Adaboost是一種迭代算法,其核心思想是針對同一個訓練集訓練不同的分類器(弱分類器),然后把這些弱分類器集合起來,構成一個更強的最終分類器[21]。GBDT是一種基于迭代機制構建的決策樹群算法,其最終預測結果由多個決策樹輸出累加生成,因其強大的泛化性能而備受青睞[22],其基本思路是將一系列較弱的基礎模型逐步疊加成為一個整體上較強的復合模型[23]。
在模型訓練過程中,我們按照7∶3的比例將數據集隨機劃分為訓練集和驗證集,并使用十折交叉驗證以確保模型的泛化能力,使用網格化搜索尋找模型的最優超參數。為了進一步提高模型的穩定性和可靠性,我們進行了100次實驗,每次實驗都隨機劃分訓練集和測試集。最后,我們將100次實驗的測試結果進行平均處理,以獲取更為準確和可靠的誤差評估。通過這一系列嚴謹的數據處理和模型訓練步驟,我們成功地選出了具有最小誤差的最優模型。模型訓練流程如圖1所示。
圖1
模型訓練流程圖
Figure1.
Model training flowchart
2 結果
2.1 特征選擇結果
各機器學習模型進行特征組合選擇的累積特征數如圖2所示。從圖2中可以看出Lasso和ElasticNet這兩種線性回歸模型的變化程度相對較小,特征數量對它們的影響并不明顯。這可能是因為線性回歸模型處理高維數據的能力不足,如果維度過多則會使模型難以擬合,反而會將其中某幾個特征作為重點而忽略其他的特征。SVM選擇的最優特征數量較少,而且在達到最佳特征選擇后,SVM的均方根誤差RMSE隨特征數量的增加而增加。這說明SVM處理高維數據的能力也不理想。RF、Adaboost和GBDT這三種集成學習模型較為類似,總的來看,它們的RMSE隨特征數量的增加而降低,這意味著集成學習模型能夠考慮更多維度的信息,也更有潛力做出準確的預測。
圖2
機器學習模型特征選擇結果
Figure2.
Machine learning model feature selection results
2.2 機器學習模型訓練結果
隨后我們將每個模型的最佳特征組合作為輸入,進行了網格化搜索,選擇最優參數。表2列出了各機器學習模型的RMSE統計學數據和各模型最佳特征組合的特征數。從表中可以看出,Lasso、ElasticNet、SVM這三種模型選擇的特征數很少,這可能與它們都采用了線性回歸有關。RF、Adaboost和GBDT這三種模型都選擇了較多的特征,GBDT選擇了最多的特征(44個)。ElasticNet的MoCA分數RMSE均值最小,為3.759,Lasso和RF的均值與ElasticNet較為接近。
綜合來看,我們使用RF來做進一步研究。圖3給出了RF模型的步態特征重要性排名的前20位,從圖3中可以看出排名前三位的特征是雙任務步長、單任務足跟著地角度和足趾離地角度步態消耗。圖4顯示了這三個步態特征的部份依賴圖(partial dependence plots,PDP),每個圖中的藍色區域顯示置信區間。從圖4a中可以看出單任務足跟著地角度在1.15~1.35之間與預測分數線性正相關,而在其他值域幾乎對預測不起任何作用。從圖4b中可以看出雙任務步長在0.52~0.65之間與預測分數線性正相關,而在其他值域幾乎對預測不起任何作用。從圖4c中可以看足趾離地角度步態消耗在0.32~0.41之間和0.6~0.68之間與預測分數線性負相關,而在其他值域幾乎對預測不起任何作用。
圖3
步態特征重要性排名(前20名)
Figure3.
Ranking of gait feature importance (top 20)
圖4
重點步態特征部份依賴關系圖
a. 單任務足跟著地角度;b. 雙任務步長;c. 足趾離地角度步態消耗
Figure4. PDP of key gait featuresa. single-task heel strike; b. dual-task step; c. toe-off gait cost
3 討論
之前有研究表明,有認知障礙者和健康人群的步態周期和運動學參數的差異具有統計學意義[24]。近年來也有研究表明足趾離地角度和足跟著地角度可能是區分有步態障礙者的重要特征[25],有研究者將這兩種特征用于區分卒中后癡呆和AD[26]。但是在研究步態特征與認知水平具體關系時,很少見到將足趾離地角度、足跟著地角度作為量化評估認知的因素。我們團隊過往研究顯示,足趾離地角度和足跟著地角度在不同認知水平的人群間有顯著差異,可以作為區分HC、MCI和AD的特征。
在本研究中,步態周期、運動學參數和時間-空間參數都作為模型的輸入被納入研究范圍,并重點對時間-空間參數與受試者具體認知水平的關系進行了研究。我們發現機器學習算法給出的貢獻度排名中,單任務足跟著地角度和足趾離地角度步態消耗這兩種時間-空間參數排名都非常靠前。在過往的研究中,雙任務行走已經被證明可以影響MCI患者的步態參數[27],并且在區分MCI或AD的分類任務中雙任務步態參數的貢獻度往往大于單任務步態參數[28]。本實驗中雙任務步長這一特征排在了貢獻度最高的位置,這也與之前的結論相符,即認知水平較高的的受試者在執行雙任務時往往比認知水平低的受試者有更長的步長[24]。但是,單任務足跟著地角度重要性也排在較高的位置,并高于雙任務足跟著地角度,這一結果有些意外。這可能是因為,認知水平越低的受試者更容易“拖步”。有研究表明足跟著地角度是反映“拖步”的最好指標[29],由于低認知水平的受試者在執行任務時容易“拖步”,他們的足跟著地角度本來就小,這導致他們的雙任務足跟著地角度和單任務足跟著地角度相比下降的并不多。而其他認知水平的受試者在執行雙任務時足跟著地角度相較于單任務足跟著地角度都有不同程度的下降,這使得雙任務足跟著地角度這一特征在不同認知水平受試者之間的差異不大,因此機器學習模型更關注單任務足跟著地角度這一特征。同時從單任務足跟著地角度排名靠前可以看出,這一特征甚至比大部分的雙任務特征更能反映受試者當前的認知水平。有研究表明足跟著地角度的減少意味著患者的足部廓清能力的損害,進而會導致跌倒的發生[30]。但單任務足跟著地角度是否在任何條件下都優于其他特征這需要在未來進行更深入的研究。此外,足趾離地角度的步態消耗這一特征也排在靠前的位置上,并且從足趾離地角度步態消耗的PDP圖上可以看出,擁有較大步態消耗的受試者往往具有較低的MoCA值,這說明MCI這類認知水平較低的受試者在執行雙任務時會受到較大的影響,因此他們的雙任務步態消耗較大,而認知水平較高的正常受試者執行雙任務受到的影響小,會有更小的步態消耗。足趾離地角度步態消耗的重要性領先于其他特征的步態消耗,這說明足趾離地角度很有可能是雙任務中變化更明顯的步態特征。以后的研究要更加重視這一特征。此外,之前的大部分研究是做分類預測,并不需要給出受試者精準的認知水平預測,因此機器學習算法只需要關注三種認知水平的受試者之間有顯著差異的特征即可,而這些特征在同一組認知水平的受試者中可能并沒有顯著的區別。但本實驗是為了預測受試者的認知水平,由于預測分數是連續的,機器學習模型就會更關注在不同認知分數上有不同變化的特征,本組結果說明雙任務步長、單任務足跟著地角度、足趾離地角度步態消耗這三個特征與受試者具體的認知水平相關性更強,這為MCI早期篩查提供了新的思路。近年來,有關MCI和AD患者的步態障礙研究越來越多,通過機器學習技術建立回歸模型可以幫助臨床醫生更快更方便地檢測患者的認知水平,為早期治療提供更多的支持。
本研究仍存在一些局限性:① 研究比較了部分線性回歸模型和集成學習模型,將來可以考慮使用深度學習進行試驗,如長短期記憶網絡、卷積神經網絡等。② 本研究所納入患者的樣本量依然有限,HC和MCI兩種受試者的數量也并不平衡,尤其是MoCA值極低和極高的樣本數量較少,可能會影響機器學習模型的準確性和泛化能力;③ 本研究采集的參數僅為受試者一次試驗的結果,難以發現與受試者認知水平變化相關的參數,未來可以按一定周期定時檢測患者的認知水平,以尋找與認知水平下降相關的步態參數。
綜上,本研究發現,可穿戴設備收集的步態數據可以作為預測認知水平的臨床工具,使用機器學習算法結合步態參數可以量化預測認知水平。雙任務步長、單任務足跟著地角度和足趾離地角度步態消耗是預測受試者認知水平的重要步態標志物,未來對預防或延緩AD的發生有重要的臨床應用價值。
重要聲明
利益沖突聲明:本文全體作者均聲明不存在利益沖突。
作者貢獻聲明:陶帥:提出主要研究目標,負責研究的構思與設計;胡泓彬:負責研究的實施,撰寫論文;孔麗文:進行數據的收集與整理;呂澤平:負責調查開展、概念提出、醞釀實驗;汪祖民:負責可視化、審查和寫作;趙潔:負責文章的質量控制與審查,以及論文的修訂;劉爽:負責文章整體的監督管理。
倫理聲明:本研究通過了國家康復輔具研究中心附屬康復醫院研究倫理委員會的審批(批文編號:S20220226)。