現有一次性身份認證技術無法持續保證整個人-機交互會話過程中的用戶身份合法性,且往往需要用戶主動配合而嚴重限制可用性。本研究首次提出一種基于超寬譜(UWB)生物雷達檢測心臟微動的非接觸身份識別新技術,通過生物雷達連續檢測心臟體表區域距離維多點微動回波,在心拍分割的基礎上利用二維主成分分析(2D-PCA)壓縮提取心拍周期內距離通道-采樣點二維圖像的矩陣特征用于身份識別。實測實驗中,以多距離單元& 2D-PCA特征方案為基礎結合兩種常規的參考特征方案,選取三種典型分類器為代表在正常呼吸和屏息兩種狀態下進行心拍身份識別。結果表明,本文所提多距離單元& 2D-PCA特征方案表現出最優的識別效果(識別率最高可達90%以上),相對最佳距離單元&整條心拍特征方案識別準確率總體平均提高6.16%(正常呼吸6.84%、屏息5.48%),相對多距離單元&整條心拍特征方案總體平均提高27.42%(正常呼吸28.63%、屏息26.21%)。本研究有望為未來社會用戶信息安全防護提供一種無擾式、全天候、非接觸、連續性身份識別新方法。
引用本文: 黃瑋, 任偉, 王可涵, 李釗, 王健琪, 路國華, 祁富貴. 微波心紋:基于超寬譜生物雷達檢測心臟微動的非接觸身份識別新技術. 生物醫學工程學雜志, 2024, 41(2): 272-280. doi: 10.7507/1001-5515.202309068 復制
版權信息: ?四川大學華西醫院華西期刊社《生物醫學工程學雜志》版權所有,未經授權不得轉載、改編
0 引言
隨著智慧互聯時代的發展,用戶身份識別技術[1-2]已成為數據安全、信息隱私防護等信息安全防護需要的關鍵防線。然而,傳統的“一次認證”靜態驗證方式(如人臉識別[3]、指紋識別[4]、虹膜掃描[5]等)僅在用戶初次登錄時核驗用戶身份,無法保證整個會話期間用戶的持續合法性,且易受復制攻擊,極大地限制了其身份防護性能。為此,研究者提出持續性身份認證技術,即在整個登錄周期內不斷驗證系統是否由初始登錄時的同一用戶操作,現有典型方案包括間歇性硬性驗證(間歇密碼驗證[6]、指紋/虹膜間歇掃描[7])以及基于用戶生物學行為特征的連續認證機制(按鍵動力學[8]、凝視模式[9]等),在一定程度上實現了連續認證,但仍存在諸多局限性:① 要求用戶主動配合而有擾:間歇性重復驗證要求用戶間歇性有意識、主動與登錄系統進行交互操作,干擾用戶而降低可用性;② 接觸式:認證過程要求用戶與系統進行直接或近距離接觸,限制用戶自由;③ 易受環境影響:光學方案易受弱光黑夜、衣物遮擋影響,指紋易受手指汗漬及異物擾亂。因此,如何實現非接觸、無擾、主動式的連續性身份認證是面向未來信息社會用戶信息安全防護的重要需求和難題。
心臟生理學研究發現,每個人的心臟物理屬性(解剖學結構、部件大小等)、生理運動屬性(心動模式、血液循環模式等)具有特異性和唯一性,使得人體心臟結構性運動引起的體表微動時序變化也具有個體唯一性[10]且難以復制。另一方面,以本課題組為代表的生物雷達人體生理微動檢測相關研究證明,生物雷達根據多普勒原理,通過發射電磁微波可以非接觸穿透非金屬障礙物,檢測并放大這類呼吸心跳生理運動引起的胸部體表微動[11-14],并且最近研究表明雷達回波中蘊含相應個體唯一性的心臟運動相關特征,有望作為用戶身份驗證的可靠生物特征[15-16]。在此方面,目前相關研究極少且處于探索階段,僅有文獻[17-18]等基于點頻連續波(continuous wave,CW)雷達,直接基于雷達回波心拍數據或提取信號形態學特征初步實現了少量個體樣本的身份識別。然而上述研究存在以下問題:① 將心臟運動引起的微動胸壁看成單一點目標,因而僅能獲得信息粗略的一維回波信號;② 來自同一三維心臟活動的振動源信號,在胸壁表面不同距離向上會形成差異性的多距離點元微動,而CW雷達無距離分辨率,無法分辨并獲取胸壁區域多點微動回波。上述兩個關鍵原因將導致生物雷達所獲信息單一,嚴重影響目標身份識別的準確率和穩定性。
為此,本研究創新性地提出利用超寬譜(ultra wideband,UWB)生物雷達探測心臟胸壁曲面的多距離點元回波,依靠UWB雷達的高距離分辨率優勢[14],可在距離維斷層式探測胸壁曲面上不同距離層的微動情況,獲取更加豐富的反映心臟徑向運動特點的時間-距離二維雷達回波,結合二維主成分分析(two-dimensional principal component analysis,2D-PCA)心拍特征提取和機器學習識別方法,進一步提升身份識別效果,力圖實現非接觸、無擾無感、全天候、自然連續的身份認證。
1 材料和方法
1.1 基于UWB生物雷達的心臟體表微動回波模型
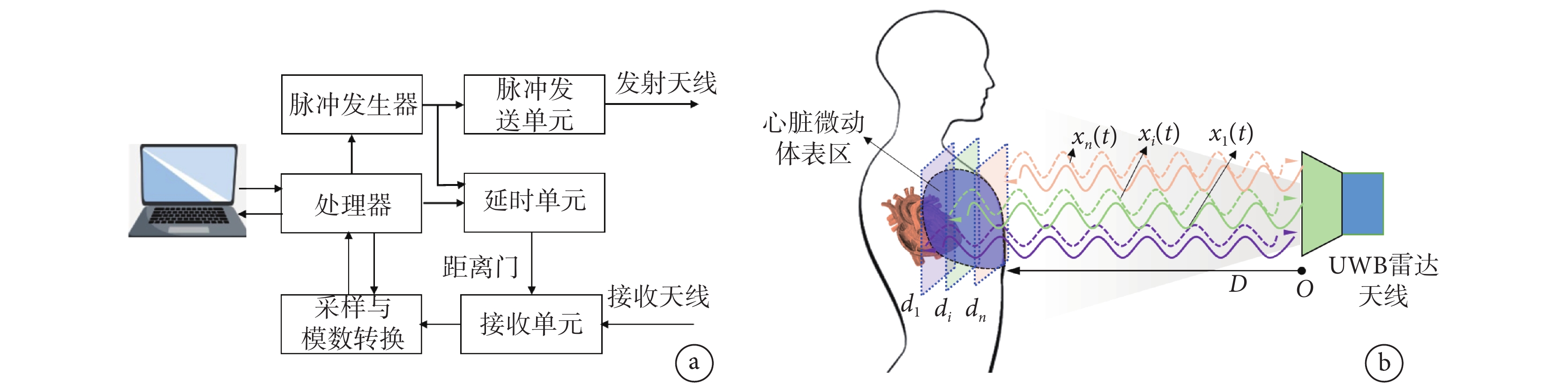
脈沖UWB生物雷達傳感器測量心臟跳動這一機械運動,主要原理是利用反射脈沖到接受天線的時間和幅度變化進行心臟體表微動生理參數測量。UWB雷達系統工作原理如圖1a所示。
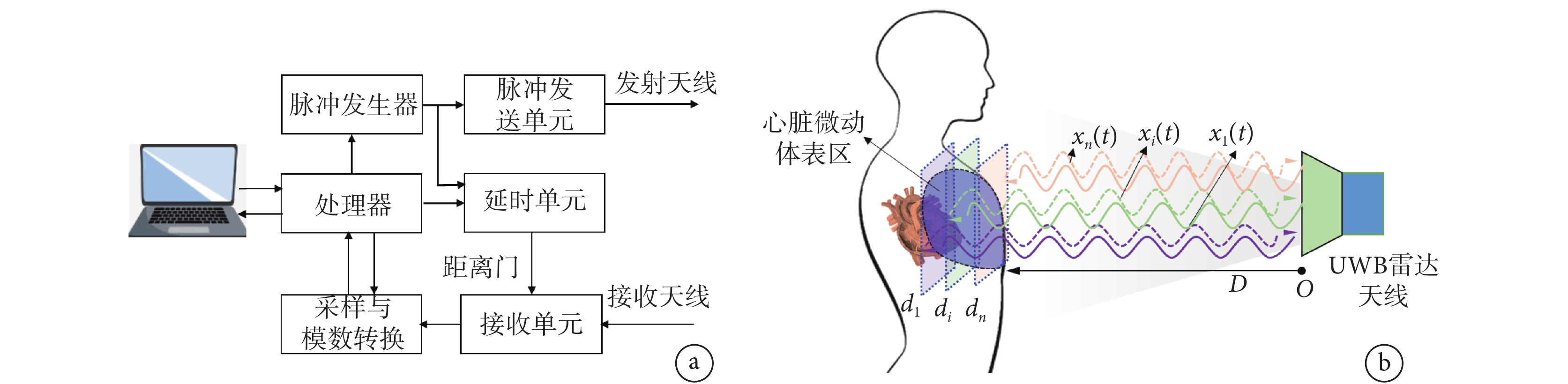 圖1
UWB生物雷達人體信號采集系統
圖1
UWB生物雷達人體信號采集系統
a. UWB雷達系統工作原理;b. UWB生物雷達探測人體心臟體表微動示意圖
Figure1. UWB bio-radar human signal acquisition systema. the working principle of UWB radar system; b. the diagram of human heart micro-motion detection based on bio-radar
UWB雷達探測心臟體表微動過程如圖1b所示,當雷達發射天線發射脈沖后,雷達接收天線會接收到從人體心臟體表曲面沿距離向的不同距離區間反射回波  :
:
 |
其中  是天線與胸壁曲面第i個距離區間的固定距離,
是天線與胸壁曲面第i個距離區間的固定距離, 是此距離區間上呼吸引起的位移幅度,
是此距離區間上呼吸引起的位移幅度, 為心跳引起的位移幅度,
為心跳引起的位移幅度, 代表呼吸頻率,
代表呼吸頻率, 代表心跳頻率。歸一化的發射脈沖用
代表心跳頻率。歸一化的發射脈沖用  表示,則總脈沖響應為:
表示,則總脈沖響應為:
 |
其中  為觀測時間,
為觀測時間, 為傳播時間。
為傳播時間。 表示第i個距離區間對應的傳播時間
表示第i個距離區間對應的傳播時間  和振幅為
和振幅為  胸壁微動的響應。
胸壁微動的響應。 表示各靜態目標響應,傳播時間為
表示各靜態目標響應,傳播時間為  ,振幅為
,振幅為  。
。 為收-發脈沖時間間隔,由
為收-發脈沖時間間隔,由  決定,其值為固有傳播時間
決定,其值為固有傳播時間  加上與呼吸和心跳位移相關的兩個正弦延遲的總和:
加上與呼吸和心跳位移相關的兩個正弦延遲的總和:
 |
其中  是光速,
是光速, ,
, ,
, 。
。
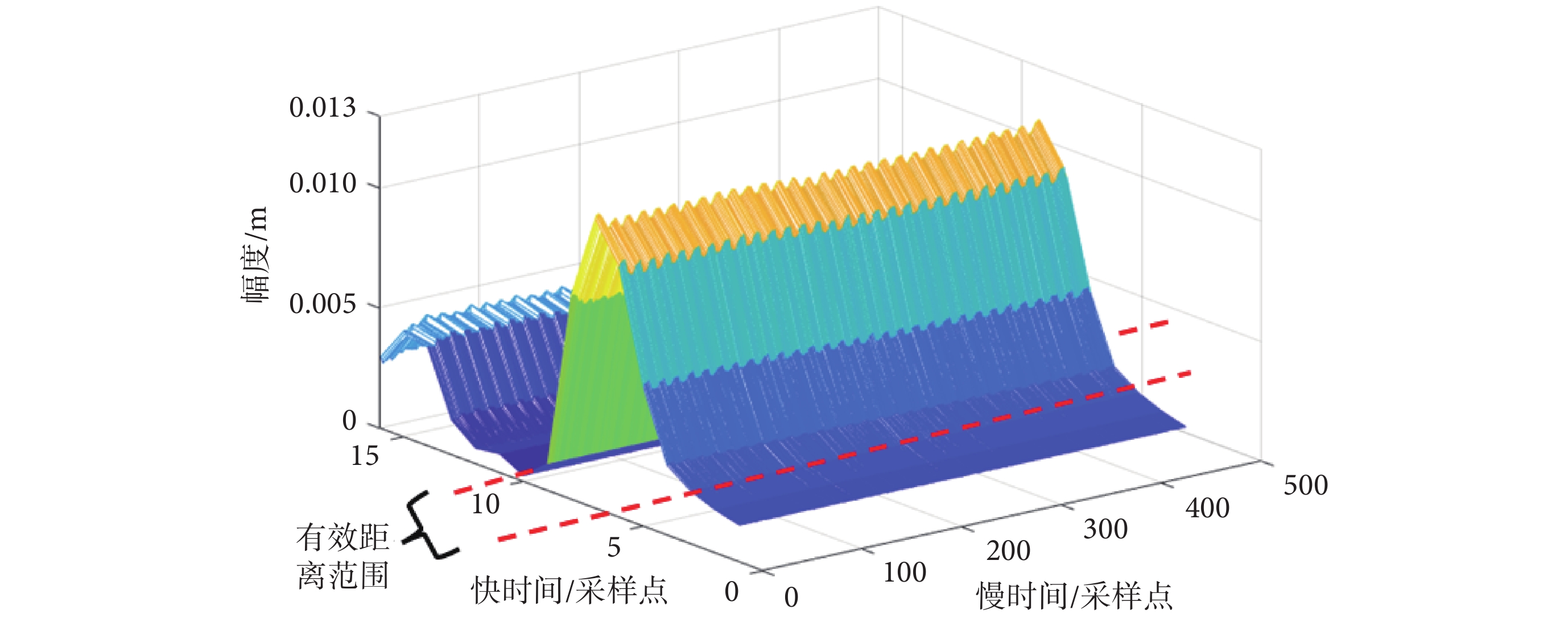
對于在慢時間  離散時刻所得N條時間序列存于回波矩陣R(如圖2所示)中:
離散時刻所得N條時間序列存于回波矩陣R(如圖2所示)中:
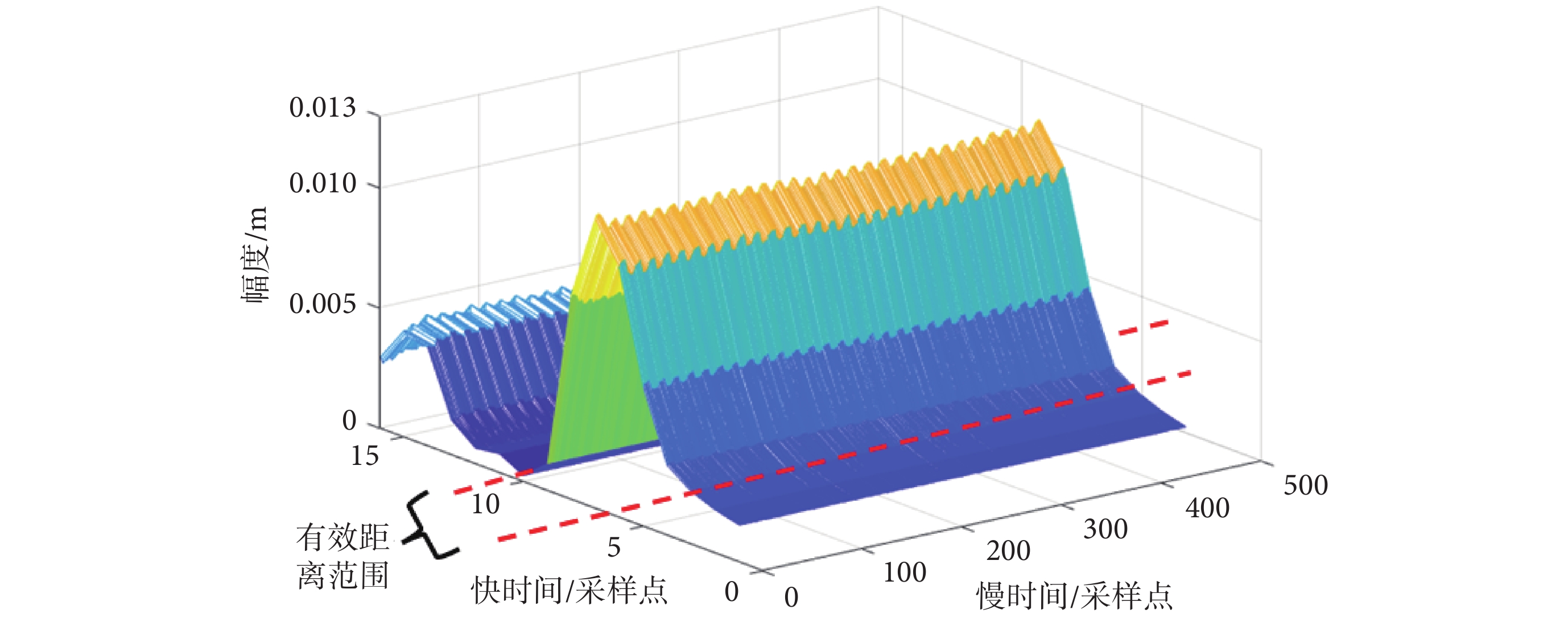 圖2
UWB雷達時間-距離二維回波
Figure2.
Time-range two-dimensional UWB radar echo
圖2
UWB雷達時間-距離二維回波
Figure2.
Time-range two-dimensional UWB radar echo
 |
其中m和n分別代表快時間和慢時間的采樣數。 是慢時間的脈沖持續時間,
是慢時間的脈沖持續時間, 是快時間的采樣間隔。
是快時間的采樣間隔。
回波矩陣R可以理解為在有效距離范圍內的心臟體表微動信號區域,行向量記錄心臟體表曲面任一距離區間微動隨時間變化的雷達檢測回波,而列向量記錄任一時刻不同距離區間的微動變化。
1.2 方法
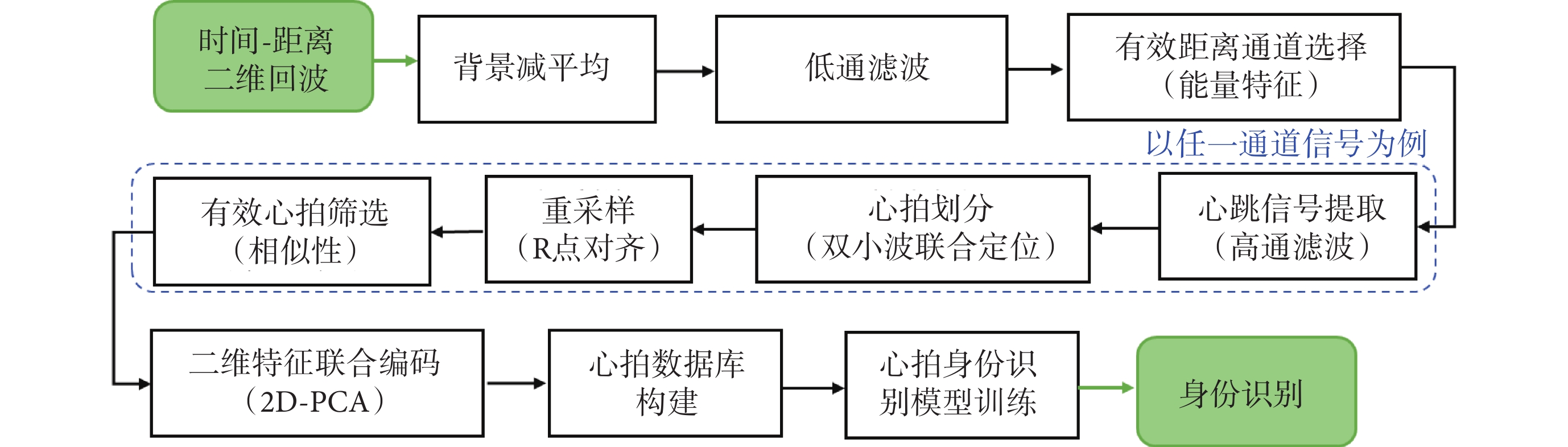
對于心臟體表微動UWB雷達時間-距離二維回波信號,本文提出了一個基于UWB雷達感知心臟體表微動實現人體身份識別的信號處理框架,具體流程如圖3所示,主要包括預處理、心拍特征提取、心拍身份識別3個關鍵模塊。
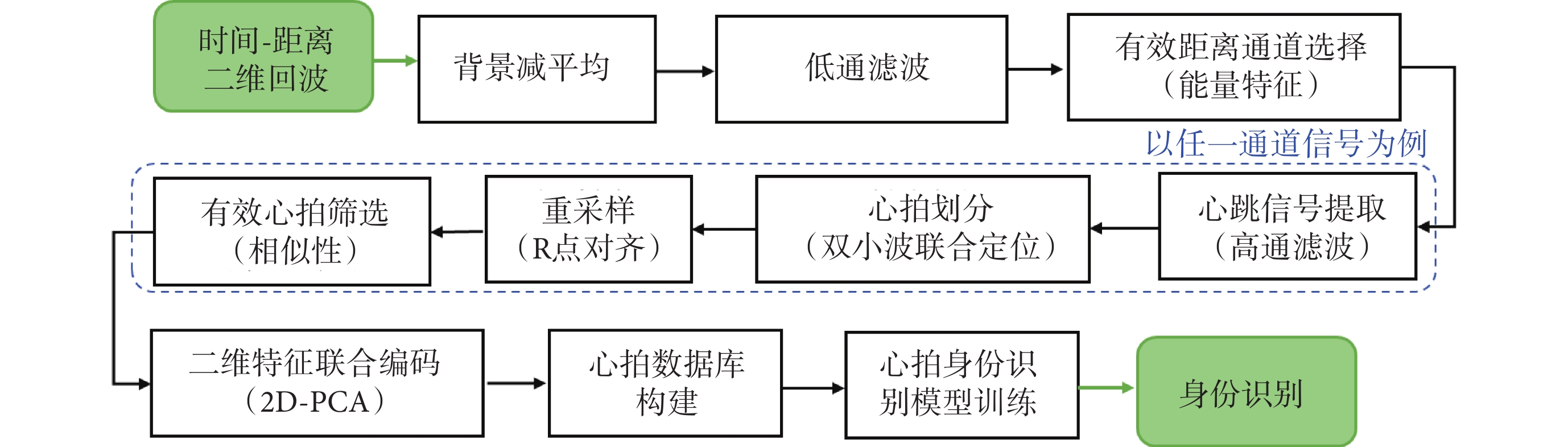 圖3
基于UWB雷達感知心臟體表微動實現人體身份識別信號處理框架
Figure3.
Signal processing framework of human identification based on heart micro-motion sensing using UWB bio-radar
圖3
基于UWB雷達感知心臟體表微動實現人體身份識別信號處理框架
Figure3.
Signal processing framework of human identification based on heart micro-motion sensing using UWB bio-radar
1.2.1 預處理
對于UWB雷達探測胸壁表面微動的時間-距離二維回波,預處理主要包括3步:① 去噪。通過背景減平均去除靜態雜波,然后進行直流濾波去除基線漂移,最后構造31階Hamming窗、截止頻率為5 Hz的理想低通濾波器,用于去除原始信號中的高頻分量。② 有效距離范圍信號選擇。對于去噪后的時間-距離二維矩陣,沿距離向求取每個距離通道信號  的能量值,并以能量作為特征定位最佳距離通道
的能量值,并以能量作為特征定位最佳距離通道  以及包含心臟微動信息的有效距離范圍,即
以及包含心臟微動信息的有效距離范圍,即  個距離通道信號。特別地,在本研究中選取
個距離通道信號。特別地,在本研究中選取 
 作為有效距離范圍多通道信號,即
作為有效距離范圍多通道信號,即  。③ 心跳信號提取。對于有效距離范圍內任一距離通道信號,采用理想帶通濾波器(截止頻率為1~5 Hz)提取出心跳信號。
。③ 心跳信號提取。對于有效距離范圍內任一距離通道信號,采用理想帶通濾波器(截止頻率為1~5 Hz)提取出心跳信號。
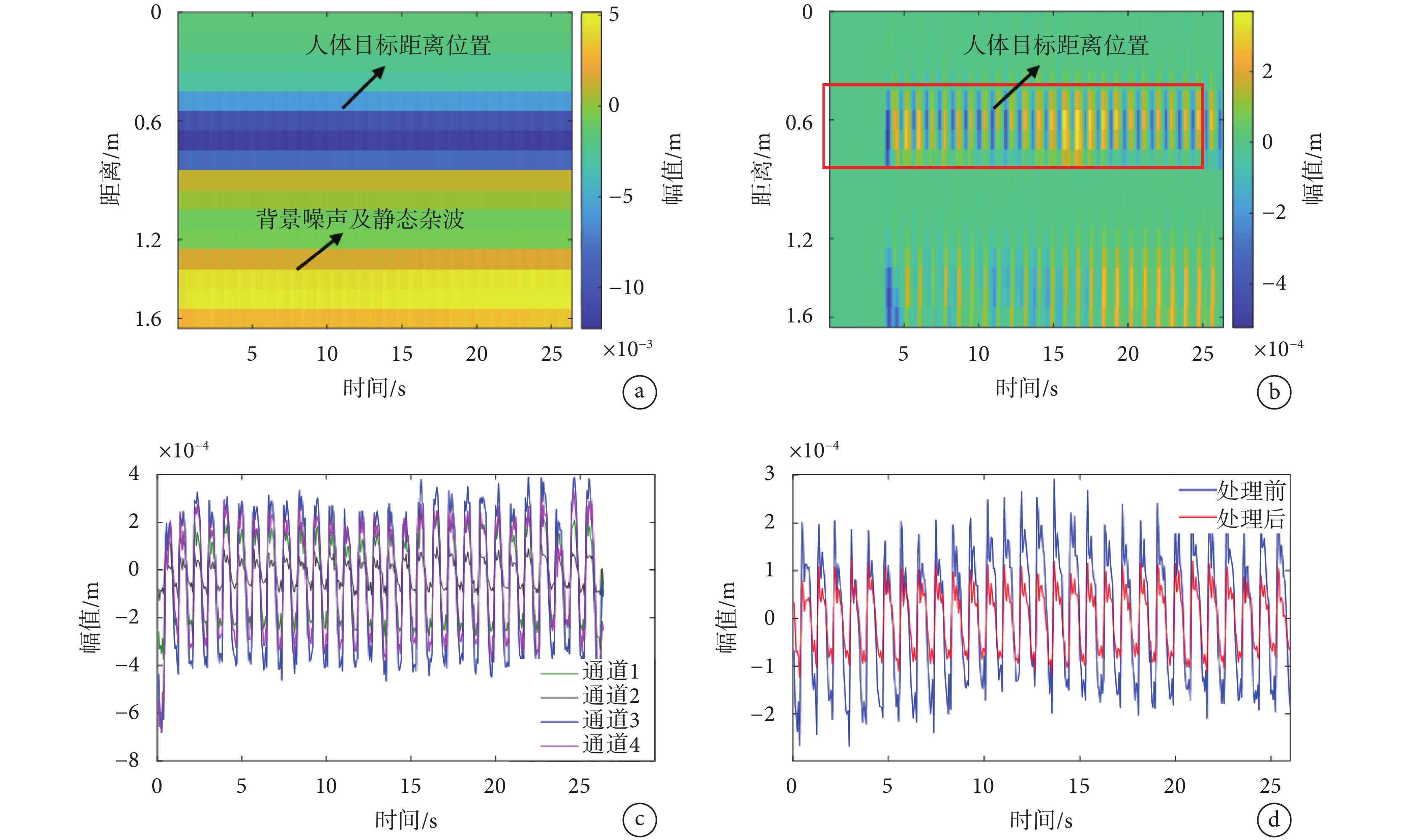
以一例靜態人體UWB雷達探測回波為例(見圖4a),原始回波整個距離空間混雜著強烈的靜態雜波和噪聲,生理微動淹沒其中。經過去噪后(見圖4b),目標所在距離范圍內可觀察到明顯的微動響應回波。圖4c為基于能量選擇的4個距離單元心跳呼吸混合信號。再經過呼吸心跳處理后,所得信號(見圖4d)可觀察到顯著的心跳節律,并且幅值也遠小于混合信號,這是因為幅度更大的呼吸分量已經被有效濾除。
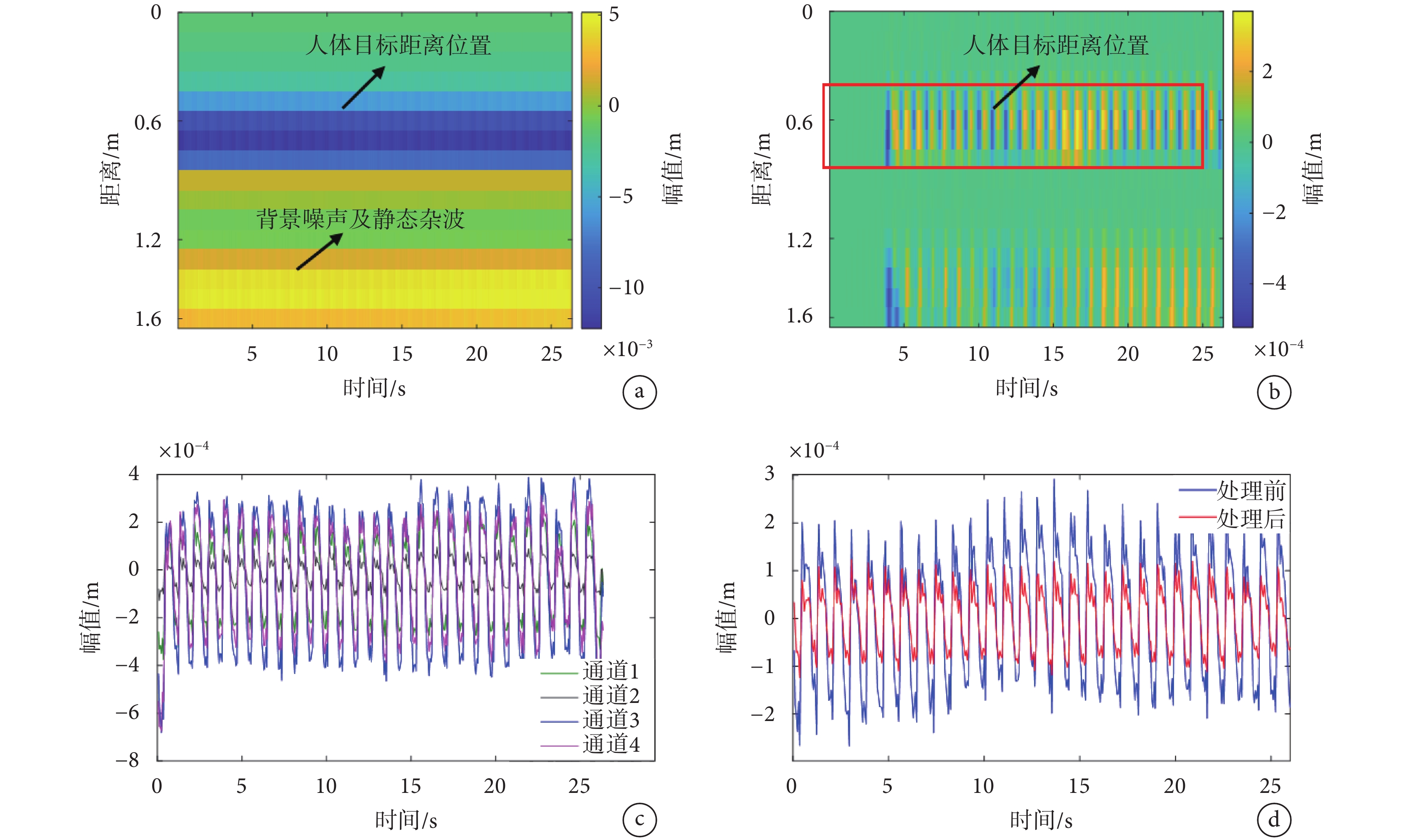 圖4
回波信號預處理
圖4
回波信號預處理
a. 原始信號;b. 去噪后信號;c. 有效距離范圍多通道信號;d. 心跳信號提取
Figure4. Echo signal preprocessinga. original radar echo; b. denoised signal; c. multiple range-bin signal in effective range scope; d. heartbeat signal extraction
1.2.2 心拍特征提取
對于預處理后的任一有效距離通道信號,需經過心拍劃分、有效心拍篩選和特征提取,才能為后續識別提供特征基礎。
(1)基于雙小波聯合定位的心拍劃分:借鑒ECG心拍劃分經典方法,本研究采用基于基準點的心拍劃分方式,即準確定位波峰-波谷基準點后,進行心拍劃分。本研究充分利用mexh和db1兩種母小波分別在周期性和細節敏感方面的綜合優勢,提出基于雙小波聯合定位的心拍劃分方法。在準確定位心臟回波波峰波谷的基礎上,考慮到心率的影響,并結合實際,一次心跳的持續時間一般不超過1.5倍平均水平,因此定義符合條件的波谷-波谷為一個可信心拍,相應條件為:波谷-波谷間僅有一個波峰點且長度≤1.5倍平均心拍長度。
(2)重采樣及有效心拍篩選:為了消除心率變化及定位校正移動而導致的單次心拍長度不一的問題,經過統計分析,對每個可信心拍以波峰為基準點,按照統一長度( 個采樣點)進行標準重采樣。此外,由于是非接觸采集人體胸壁微動,不可避免在某些時段因本能體動或其他因素導致信號嚴重變異。因此,本研究中首先求取所有心拍均值得到該目標心拍模板,然后對于任意可信心拍依次求取其與模板心拍的歐氏距離和皮爾遜相關系數,在前期試驗發現選擇歐氏距離的閾值為1.2、皮爾遜相關系數的閾值為0.6足以在盡量保證數據量的前提下剔除變異性心拍。
個采樣點)進行標準重采樣。此外,由于是非接觸采集人體胸壁微動,不可避免在某些時段因本能體動或其他因素導致信號嚴重變異。因此,本研究中首先求取所有心拍均值得到該目標心拍模板,然后對于任意可信心拍依次求取其與模板心拍的歐氏距離和皮爾遜相關系數,在前期試驗發現選擇歐氏距離的閾值為1.2、皮爾遜相關系數的閾值為0.6足以在盡量保證數據量的前提下剔除變異性心拍。
(3)基于2D-PCA的多通道心拍矩陣特征提取:對于有效距離范圍多通道信號  ,經過心拍劃分和篩選后,每個心拍矩陣可表示為
,經過心拍劃分和篩選后,每個心拍矩陣可表示為  ;其中
;其中  ,為4個有效距離通道;
,為4個有效距離通道; 為有效心拍序列索引;
為有效心拍序列索引; ,為心拍采樣點。對于每個心拍矩陣(大小為
,為心拍采樣點。對于每個心拍矩陣(大小為  ),可以看做是在當前心拍時刻三維心臟運動在距離方向的投影,多通道之間互有關聯,隱含著一定的心臟結構關聯特點。為此,本研究采用2D-PCA,在有效保留心臟運動數據結構信息的同時提取每個心拍矩陣的內在特征,還可以起到降維效果。
),可以看做是在當前心拍時刻三維心臟運動在距離方向的投影,多通道之間互有關聯,隱含著一定的心臟結構關聯特點。為此,本研究采用2D-PCA,在有效保留心臟運動數據結構信息的同時提取每個心拍矩陣的內在特征,還可以起到降維效果。
1.2.3 基于心拍特征的身份識別
基于2D-PCA的多距離通道聯合編碼進行身份識別。對于多距離通道心拍矩陣,采用2D-PCA提取特征,進一步構建個體特征數據庫,可結合機器學習分類器進行模型訓練和身份識別。同時,以傳統的基于單一整條心拍數據為特征進行身份識別的方法作為參考方法。
2 實驗及結果
2.1 UWB雷達系統及數據采集
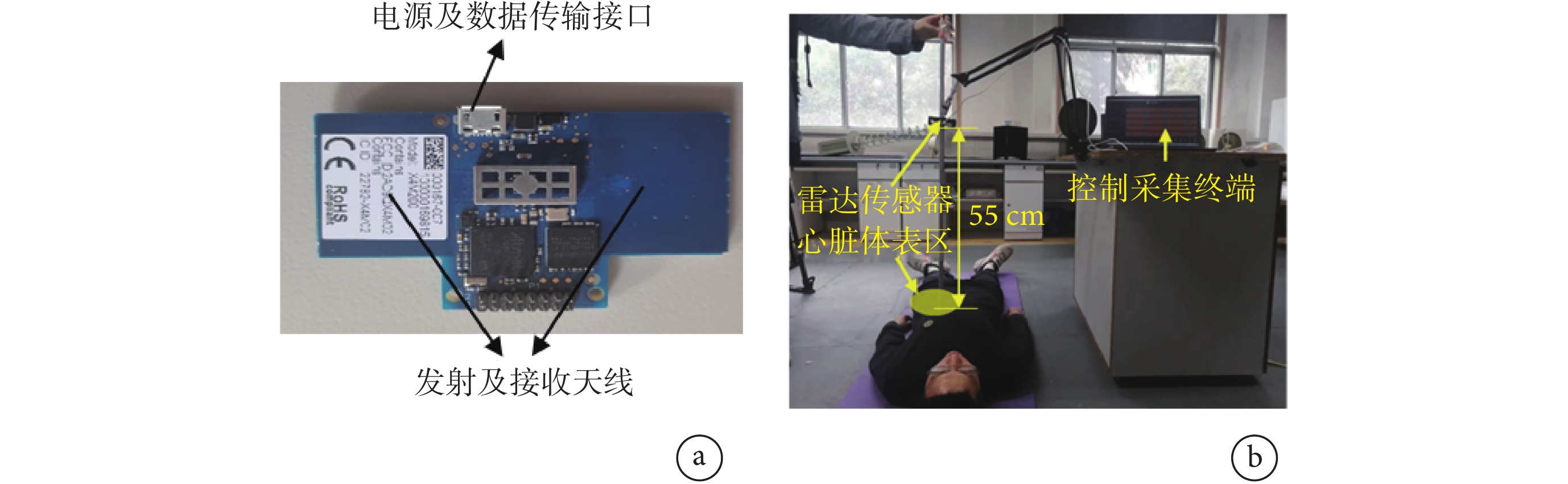
生物雷達傳感器采用Novelda公司研制的7.9 GHz超寬譜雷達傳感器X4M200(如圖5a所示),其關鍵參數如表1所示。考慮實際的應用場景后,數據采集時將人體與雷達距離定為0.55 m。
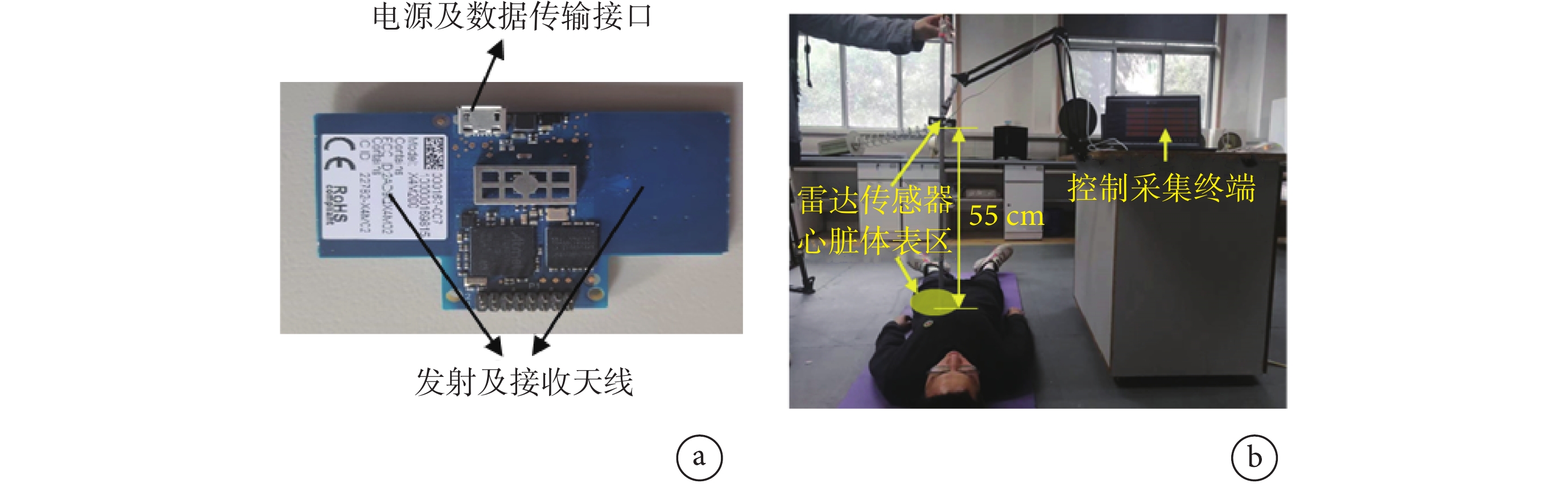 圖5
實驗系統及場景
圖5
實驗系統及場景
a. 生物雷達傳感器;b. 數據采集實驗場景
Figure5. Experimental system and scenarioa. structure of bio-radar sensor; b. data acquisition experimental scene
本研究為探索性研究,故數據采集時更多考慮較為理想姿態下雷達探測心臟微動。隨機招募18例志愿者(年齡19~30歲,男性和女性各9名),實驗時志愿者平躺于地面且正對雷達,利用激光定位,保持雷達在心臟正上方,調節雷達與體表距離約為55 cm(如圖5b所示),每位志愿者按照統一指示進行數據采集。此外,為了對比呼吸行為對識別效果的影響,每位志愿者分別在正常呼吸和屏息兩種基本狀態下進行數據采集。實驗時,每位志愿者采集12組數據,正常呼吸狀態每組數據采集時長25 s,屏息狀態每組數據采集時長20 s。每組數據采集前后志愿者充分休息,恢復平靜。
2.2 心拍檢測實驗
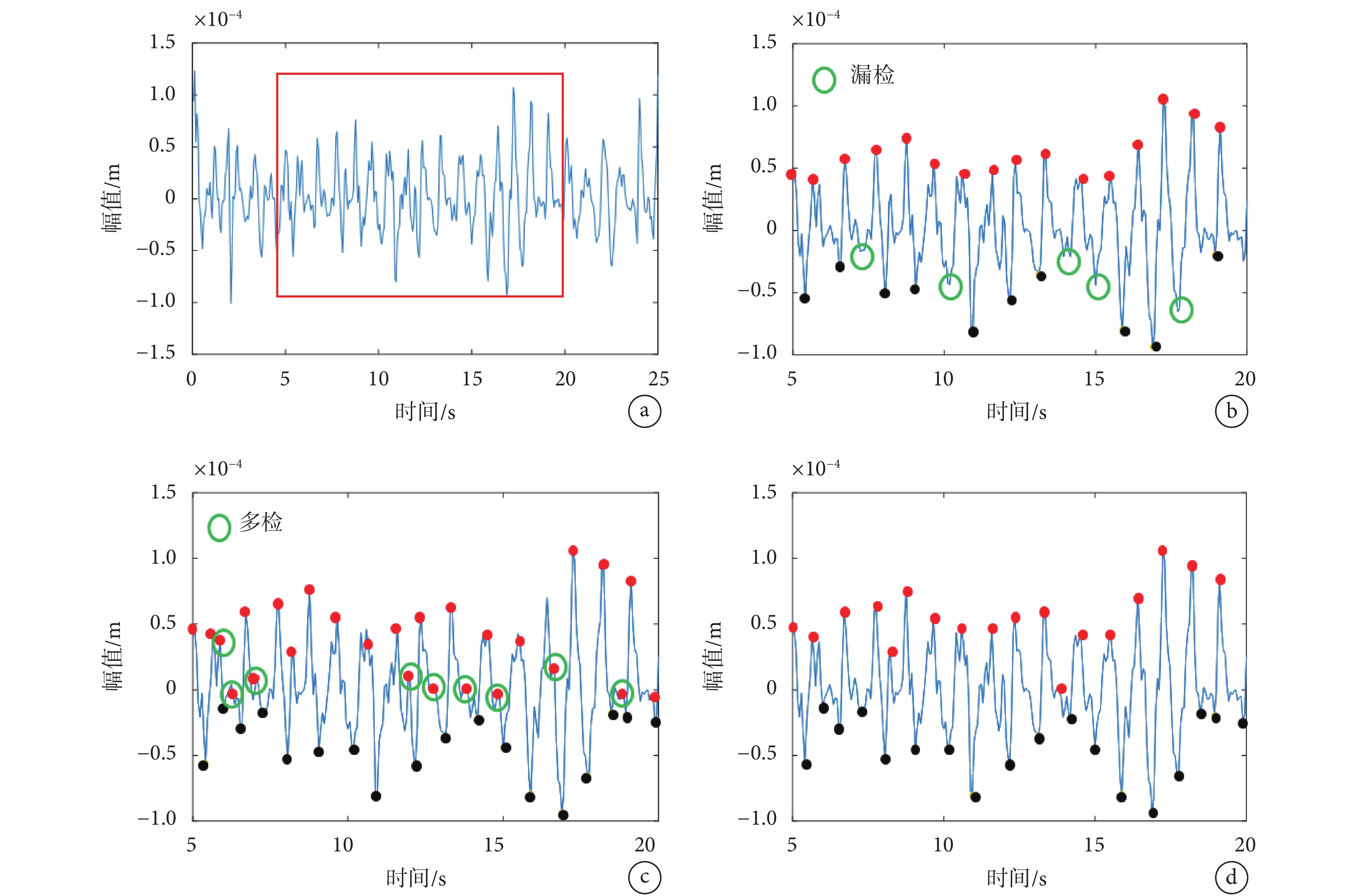
基于雙小波聯合定位的心拍分割實驗。為驗證本文提出的雙小波聯合定位方法的有效性,以一段典型信號(如圖6a所示)為例,分別采用mexh小波變換和db1小波變換對信號進行波峰及波谷定位,結果如圖6b~c所示。
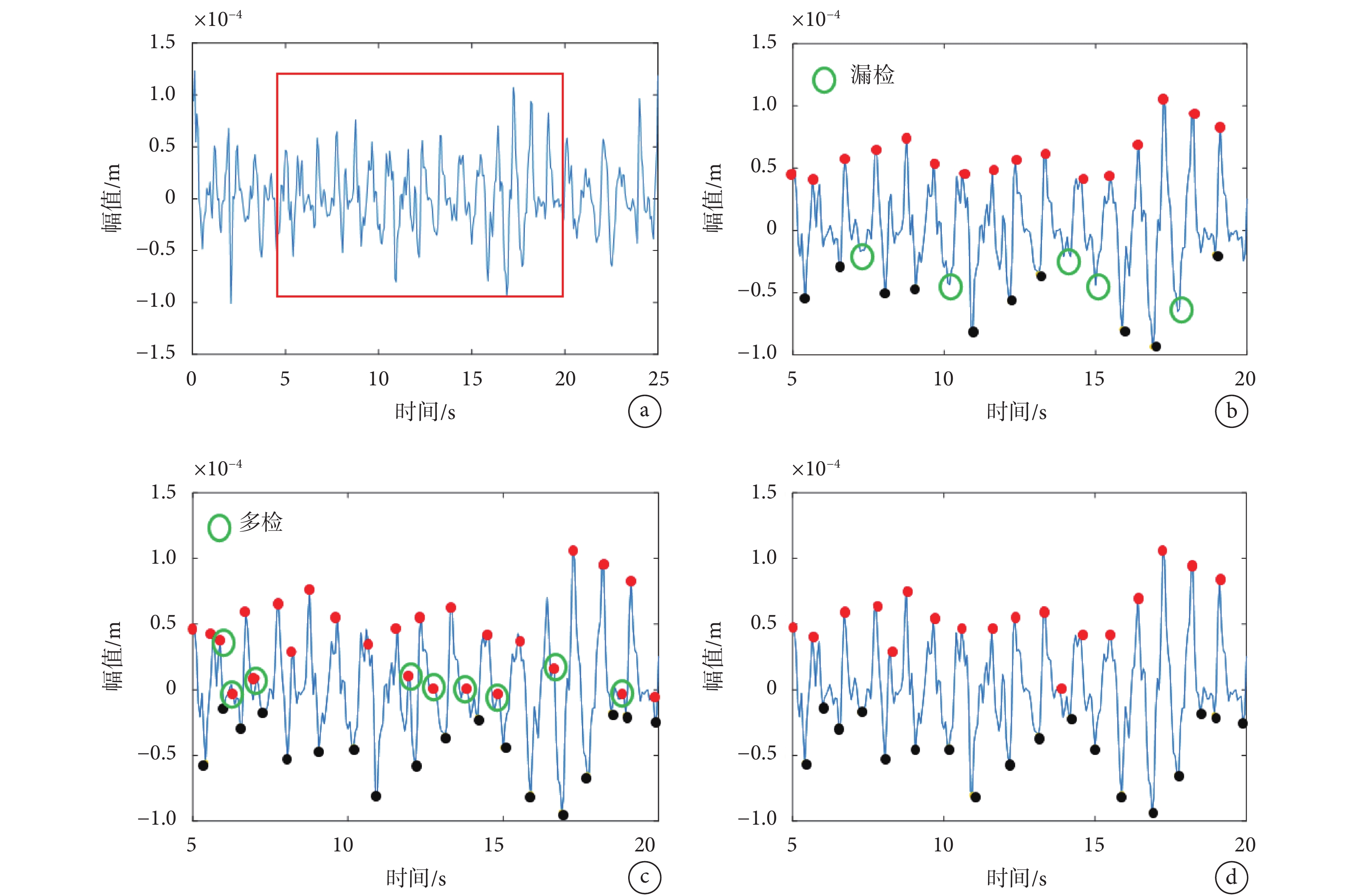 圖6
心拍定位實驗
圖6
心拍定位實驗
a. 預處理信號;b. mexh小波變換定位結果;c. db1小波變換定位效果;d. 雙小波聯合定位效果
Figure6. Heartbeat localization experimenta. preprocessed signal; b. peak positioning based on mexh wavelet transform; c. peak positioning based on db1 wavelet transform; d. peak positioning based on dual wavelet joint positioning
可以發現,由于mexh小波更注重周期而對細節不敏感,當信號擾動時易發生漏檢(見圖6b)。另一方面,db1與雷達心臟信號在形態學上更為相似,對細節更加敏感,因而基于db1小波變換方法檢測時會出現嚴重多檢現象(見圖6c)。本文所采用雙小波聯合定位方法檢測結果如圖6d所示,可見能夠準確地定位出絕大部分波峰-波谷。
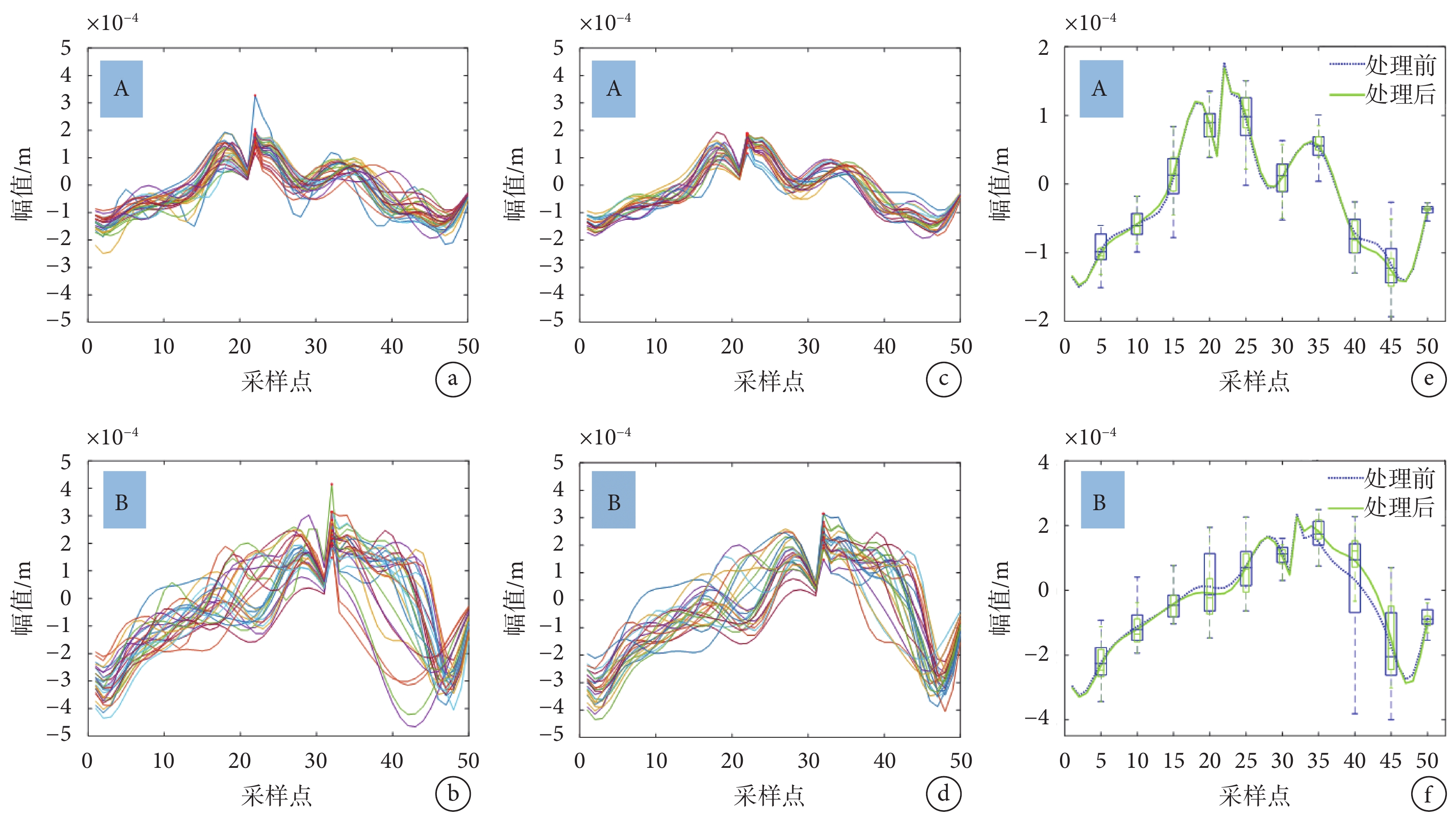
對于個體的每條心臟微動雷達回波,在進行波峰-波谷檢測及心拍分割后,即可得到個體心拍集合。圖7a~b所示為隨機選取兩位志愿者固定時段內的原始心拍集合。同時,在同一個體心拍集合中,可能由于某些時刻隨機環境干擾和身體微動影響,使得心拍信號發生變異而偏離個體本身穩定心拍特性,這將對心拍身份識別效果產生嚴重影響。
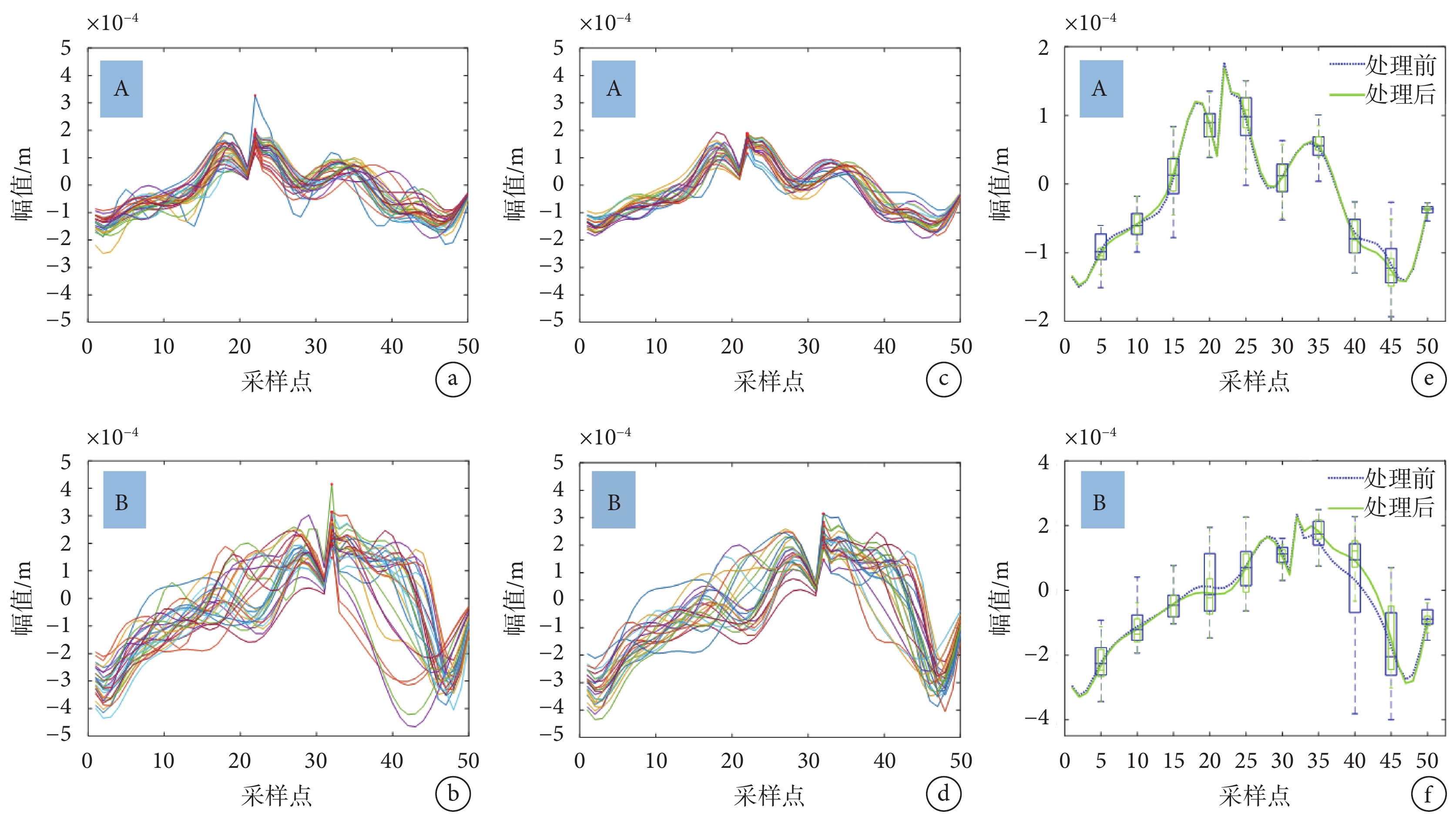 圖7
隨機2位志愿者A和B的心拍獲取與處理實驗
圖7
隨機2位志愿者A和B的心拍獲取與處理實驗
a-b. 個體心拍集合;c-d. 有效心拍篩選后的有效心拍集合;e-f. 異常心拍篩選前后各心拍與心拍模板的偏離情況(箱圖)
Figure7. The experiment on obtaining and processing heart beats of two random volunteers A and Ba-b. the individual heart beat set; c-d. screened effective heart beats; e-f. the deviation of each heart beat from corresponding heart beat template before and after abnormal heart beats screening (box diagram)
針對上述異常心拍問題,本研究提出構建心拍模板并結合歐氏距離和皮爾遜相關系數雙參數進行異常心拍剔除。以志愿者A和B原始心拍集合為例,可以發現與個體心拍整體趨勢偏離較大或變異嚴重的心拍經過篩選后被有效去除(圖7a~b vs. 圖7c~d)。為進一步量化評價心拍篩選的效果,本研究基于箱圖統計方法,對異常剔除前/后心拍集合在各采樣時刻上的數值與相應心拍模板的偏離情況進行統計分析(如圖7e~f所示)。可以發現,無論是志愿者A還是B,經過異常剔除后的各心拍各時刻采樣數值上-下限幅值差和上-下四分位數均明顯小于剔除前,表明剔除后有效心拍在任意采樣時刻上離散度更低、心拍信號更接近,這將有效改善后期基于連續心拍的身份識別效果。
2.3 身份識別模型訓練與測試實驗
基于2.1節描述的UWB雷達系統及數據情況,本研究結合前述預處理及心拍檢測流程,主要構建在正常呼吸和屏息兩種狀態下的三種雷達心臟微動回波特征方案,分別是:① 最佳距離單元&整條心拍特征(optimal range bins & heart beat,ORB-HB),即選取最佳距離單元信號進行心拍處理,且以整個有效心拍作為目標特征;② 多距離單元&整條心拍特征(multiple range bins & heart beat,MRB-HB),即選取有效距離范圍內的多距離單元信號分別進行心拍處理,同樣以整個有效心拍作為特征數據;③ 多距離單元& 2D-PCA特征(MRB & 2D-PCA),即選取有效距離范圍內多個距離單元信號分別進行心拍處理,構成回波通道-心拍采樣點2D矩陣,基于2D-PCA進行矩陣特征提取并作為特征數據。三種特征方案結合兩種呼吸狀態,共形成6種特征數據庫(正常呼吸狀態下ORB-HB、MRB-HB、MRB & 2D-PCA特征數據量分別為2 842組、10 641組、2 000組;屏息狀態下分別為2 676組、8 958組和2 000組)。
身份識別實驗中,將每個志愿者特征數據按照4∶1比例隨機劃分為訓練集和測試集,采用5折交叉驗證進行機器學習分類器訓練和識別性能測試。需要說明的是,對于個別數據庫存在略微欠對稱的問題,本研究并未進行補齊操作,且認為不會造成實質影響。此外,為了穩定驗證三種方案的身份識別效果,選取二次支持向量機(support vector machine,SVM)、三層神經網絡和k近鄰法(k-nearest neighbor,KNN)三種典型機器學習分類器進行身份識別實驗,采用準確率(Accuracy)和F1分數(F1-score)作為分類性能及效果的評估指標。
表2所示為兩種呼吸狀態下基于三種心拍特征方案結合三種典型分類器的身份識別結果。以二次SVM為例,正常呼吸狀態基于ORB-HB特征識別準確率為81.01%,MRB-HB特征識別準確率為56.81%,而本研究提出的MRB & 2D-PCA特征方案的身份識別準確率為89.21%,分別相對提高8.2%和32.4%;同時,在屏息狀態下,本文MRB & 2D-PCA特征方案的身份識別準確率為90.25%,相對兩種參考特征方案也分別提高5.95%和30.55%。基于三層神經網絡和KNN分類器的識別結果基本與上述情況一致。總體來看,本文提出的MRB & 2D-PCA特征表現出最優的識別效果(基于二次SVM和三次神經網絡分類器),相對ORB-HB特征方案識別準確率總體平均提高6.16%(正常呼吸6.84%、屏息5.48%),相對MRB-HB特征方案總體平均提高27.42%(正常呼吸28.63%、屏息26.21%)。結果證明了利用2D-PCA對距離通道-采樣點二維矩陣進行特征提取,相應特征具有更高的個體特異性和穩定性。
其次,盡管MRB-HB特征方案相較于ORB-HB特征方案在特征數據量上占有絕對優勢,通過有效距離范圍多通道擴充方式使得特征數量超出近4倍,但實際識別效果卻急劇惡化(三種分類器平均識別準確率在正常呼吸和屏息狀態分別下降19.08%和17.80%)。這可能是因為,在經過多通道數據擴充的同時,相鄰多通道數據的差異性劇增,對身份識別帶來的不利影響占據了主導,從而嚴重影響了分類器對個體特征的學習效果。
3 討論
實驗結果表明,本研究根據UWB雷達獲取的人體心臟體表區域的多點微動回波,基于MRB & 2D-PCA特征方案進行個體身份識別,有效提高了心紋身份識別準確率。與現有研究[17-18]將心臟體表微動看作單一點目標不同,本研究首次將心臟體表微動看成三維曲面微動,利用UWB高距離分辨率優勢獲取距離維多點信號,在每個心拍周期內構成通道-心拍采樣點圖像矩陣,該矩陣將蘊含心臟體表區域運動的結構性信息。此時,無論是取最優通道或將多通道信息孤立式對待,均無法提取完善且有效的特征信息用于身份識別。正如表2中結果所示,MRB-HB特征方案雖然通過數據擴充方式也利用了多通道數據,但識別效果卻嚴重惡化,甚至遠低于ORB-HB特征方案。而MRB & 2D-PCA特征方案從二維層面壓縮提取圖像矩陣的特征,一方面可有效保留心臟結構信息,另一方面可有效剔除圖像中的無用信息,提取出主要能量集中的低頻分量,降低數據維度,故其識別準確率也穩定高于前兩種參考方法。
本研究所用三種分類器均為最常規分類器,并未進行任何改進和優化,主要目的是以之作為穩定基礎,便于對三種特征方案在身份識別過程的效果進行對比測試。此外,三種分類器識別結果中SVM最優,神經網絡次之,KNN最差。這可能是因為本研究中身份識別特征數據均為生理趨勢相近的心拍數據,而KNN算法僅通過找到數據集中距離待測樣本最近的K個值,再利用這K個值投票作為待測樣本的預測結果來進行分類,并不會像SVM將樣本映射到高維特征空間,使得樣本在高維空間線性可分而實現分類,導致KNN分類準確率相對較低。
此外,本研究基于UWB生物雷達獲取人體心臟體表區域多點微動特征進行身份分類識別的初步探索,所利用的回波數據特征僅局限于時域特征,而相關研究[19]表明心臟微動雷達回波在其他信號域中具有識別度更高的特征分布特點,因此后續研究可綜合時域、頻域、多普勒域等特征,進行多域特征融合識別。此外,本研究進行身份識別時僅以標準分類器為基礎,后續研究可結合深度學習[20]來深度挖掘信號多域特征。
4 結論
本研究基于UWB生物雷達系統非接觸探測人體心臟運動引起的體表三維曲面微動,構建了基于UWB雷達心臟微動感知實現人體身份識別信號的處理框架,并對三種類型心拍特征方案的身份識別效果進行了分析對比。在改進心拍檢測和有效心拍篩選的基礎上,本研究首次提出基于MRB & 2D-PCA的心拍特征方案,即對于每個心拍周期內的通道-心拍采樣數二維圖像矩陣,利用2D-PCA從二維層面壓縮提取特征。實測試驗中,為了驗證本研究所提特征方案的有效性,采用最佳距離單元&整個心拍特征方案和多距離單元&整條心拍特征方案作為參考,結合二次SVM、三層神經網絡和KNN作為典型分類器進行身份識別,本文所提MRB & 2D-PCA特征方案表現出最優識別效果。本研究初步實現了基于UWB生物雷達心臟微動感知的身份識別,并首次從理論和實測兩方面論證了MRB & 2D-PCA特征方案的合理性和有效性。
重要聲明
利益沖突聲明:本文全體作者均聲明不存在利益沖突。
作者貢獻聲明:黃瑋、王可涵主要負責實驗設計及數據采集,任偉、李釗負責部分算法設計,祁富貴負責研究方案制定和論文寫作,王健琪、路國華負責研究整體指導。
倫理聲明:本研究通過第四軍醫大學第一附屬醫院醫學倫理委員會的審批。
0 引言
隨著智慧互聯時代的發展,用戶身份識別技術[1-2]已成為數據安全、信息隱私防護等信息安全防護需要的關鍵防線。然而,傳統的“一次認證”靜態驗證方式(如人臉識別[3]、指紋識別[4]、虹膜掃描[5]等)僅在用戶初次登錄時核驗用戶身份,無法保證整個會話期間用戶的持續合法性,且易受復制攻擊,極大地限制了其身份防護性能。為此,研究者提出持續性身份認證技術,即在整個登錄周期內不斷驗證系統是否由初始登錄時的同一用戶操作,現有典型方案包括間歇性硬性驗證(間歇密碼驗證[6]、指紋/虹膜間歇掃描[7])以及基于用戶生物學行為特征的連續認證機制(按鍵動力學[8]、凝視模式[9]等),在一定程度上實現了連續認證,但仍存在諸多局限性:① 要求用戶主動配合而有擾:間歇性重復驗證要求用戶間歇性有意識、主動與登錄系統進行交互操作,干擾用戶而降低可用性;② 接觸式:認證過程要求用戶與系統進行直接或近距離接觸,限制用戶自由;③ 易受環境影響:光學方案易受弱光黑夜、衣物遮擋影響,指紋易受手指汗漬及異物擾亂。因此,如何實現非接觸、無擾、主動式的連續性身份認證是面向未來信息社會用戶信息安全防護的重要需求和難題。
心臟生理學研究發現,每個人的心臟物理屬性(解剖學結構、部件大小等)、生理運動屬性(心動模式、血液循環模式等)具有特異性和唯一性,使得人體心臟結構性運動引起的體表微動時序變化也具有個體唯一性[10]且難以復制。另一方面,以本課題組為代表的生物雷達人體生理微動檢測相關研究證明,生物雷達根據多普勒原理,通過發射電磁微波可以非接觸穿透非金屬障礙物,檢測并放大這類呼吸心跳生理運動引起的胸部體表微動[11-14],并且最近研究表明雷達回波中蘊含相應個體唯一性的心臟運動相關特征,有望作為用戶身份驗證的可靠生物特征[15-16]。在此方面,目前相關研究極少且處于探索階段,僅有文獻[17-18]等基于點頻連續波(continuous wave,CW)雷達,直接基于雷達回波心拍數據或提取信號形態學特征初步實現了少量個體樣本的身份識別。然而上述研究存在以下問題:① 將心臟運動引起的微動胸壁看成單一點目標,因而僅能獲得信息粗略的一維回波信號;② 來自同一三維心臟活動的振動源信號,在胸壁表面不同距離向上會形成差異性的多距離點元微動,而CW雷達無距離分辨率,無法分辨并獲取胸壁區域多點微動回波。上述兩個關鍵原因將導致生物雷達所獲信息單一,嚴重影響目標身份識別的準確率和穩定性。
為此,本研究創新性地提出利用超寬譜(ultra wideband,UWB)生物雷達探測心臟胸壁曲面的多距離點元回波,依靠UWB雷達的高距離分辨率優勢[14],可在距離維斷層式探測胸壁曲面上不同距離層的微動情況,獲取更加豐富的反映心臟徑向運動特點的時間-距離二維雷達回波,結合二維主成分分析(two-dimensional principal component analysis,2D-PCA)心拍特征提取和機器學習識別方法,進一步提升身份識別效果,力圖實現非接觸、無擾無感、全天候、自然連續的身份認證。
1 材料和方法
1.1 基于UWB生物雷達的心臟體表微動回波模型
脈沖UWB生物雷達傳感器測量心臟跳動這一機械運動,主要原理是利用反射脈沖到接受天線的時間和幅度變化進行心臟體表微動生理參數測量。UWB雷達系統工作原理如圖1a所示。
圖1
UWB生物雷達人體信號采集系統
a. UWB雷達系統工作原理;b. UWB生物雷達探測人體心臟體表微動示意圖
Figure1. UWB bio-radar human signal acquisition systema. the working principle of UWB radar system; b. the diagram of human heart micro-motion detection based on bio-radar
UWB雷達探測心臟體表微動過程如圖1b所示,當雷達發射天線發射脈沖后,雷達接收天線會接收到從人體心臟體表曲面沿距離向的不同距離區間反射回波 :
|
其中 是天線與胸壁曲面第i個距離區間的固定距離, 是此距離區間上呼吸引起的位移幅度, 為心跳引起的位移幅度, 代表呼吸頻率, 代表心跳頻率。歸一化的發射脈沖用 表示,則總脈沖響應為:
|
其中 為觀測時間, 為傳播時間。 表示第i個距離區間對應的傳播時間 和振幅為 胸壁微動的響應。 表示各靜態目標響應,傳播時間為 ,振幅為 。 為收-發脈沖時間間隔,由 決定,其值為固有傳播時間 加上與呼吸和心跳位移相關的兩個正弦延遲的總和:
|
其中 是光速,,,。
對于在慢時間 離散時刻所得N條時間序列存于回波矩陣R(如圖2所示)中:
圖2
UWB雷達時間-距離二維回波
Figure2.
Time-range two-dimensional UWB radar echo
|
其中m和n分別代表快時間和慢時間的采樣數。 是慢時間的脈沖持續時間, 是快時間的采樣間隔。
回波矩陣R可以理解為在有效距離范圍內的心臟體表微動信號區域,行向量記錄心臟體表曲面任一距離區間微動隨時間變化的雷達檢測回波,而列向量記錄任一時刻不同距離區間的微動變化。
1.2 方法
對于心臟體表微動UWB雷達時間-距離二維回波信號,本文提出了一個基于UWB雷達感知心臟體表微動實現人體身份識別的信號處理框架,具體流程如圖3所示,主要包括預處理、心拍特征提取、心拍身份識別3個關鍵模塊。
圖3
基于UWB雷達感知心臟體表微動實現人體身份識別信號處理框架
Figure3.
Signal processing framework of human identification based on heart micro-motion sensing using UWB bio-radar
1.2.1 預處理
對于UWB雷達探測胸壁表面微動的時間-距離二維回波,預處理主要包括3步:① 去噪。通過背景減平均去除靜態雜波,然后進行直流濾波去除基線漂移,最后構造31階Hamming窗、截止頻率為5 Hz的理想低通濾波器,用于去除原始信號中的高頻分量。② 有效距離范圍信號選擇。對于去噪后的時間-距離二維矩陣,沿距離向求取每個距離通道信號 的能量值,并以能量作為特征定位最佳距離通道 以及包含心臟微動信息的有效距離范圍,即 個距離通道信號。特別地,在本研究中選取 作為有效距離范圍多通道信號,即 。③ 心跳信號提取。對于有效距離范圍內任一距離通道信號,采用理想帶通濾波器(截止頻率為1~5 Hz)提取出心跳信號。
以一例靜態人體UWB雷達探測回波為例(見圖4a),原始回波整個距離空間混雜著強烈的靜態雜波和噪聲,生理微動淹沒其中。經過去噪后(見圖4b),目標所在距離范圍內可觀察到明顯的微動響應回波。圖4c為基于能量選擇的4個距離單元心跳呼吸混合信號。再經過呼吸心跳處理后,所得信號(見圖4d)可觀察到顯著的心跳節律,并且幅值也遠小于混合信號,這是因為幅度更大的呼吸分量已經被有效濾除。
圖4
回波信號預處理
a. 原始信號;b. 去噪后信號;c. 有效距離范圍多通道信號;d. 心跳信號提取
Figure4. Echo signal preprocessinga. original radar echo; b. denoised signal; c. multiple range-bin signal in effective range scope; d. heartbeat signal extraction
1.2.2 心拍特征提取
對于預處理后的任一有效距離通道信號,需經過心拍劃分、有效心拍篩選和特征提取,才能為后續識別提供特征基礎。
(1)基于雙小波聯合定位的心拍劃分:借鑒ECG心拍劃分經典方法,本研究采用基于基準點的心拍劃分方式,即準確定位波峰-波谷基準點后,進行心拍劃分。本研究充分利用mexh和db1兩種母小波分別在周期性和細節敏感方面的綜合優勢,提出基于雙小波聯合定位的心拍劃分方法。在準確定位心臟回波波峰波谷的基礎上,考慮到心率的影響,并結合實際,一次心跳的持續時間一般不超過1.5倍平均水平,因此定義符合條件的波谷-波谷為一個可信心拍,相應條件為:波谷-波谷間僅有一個波峰點且長度≤1.5倍平均心拍長度。
(2)重采樣及有效心拍篩選:為了消除心率變化及定位校正移動而導致的單次心拍長度不一的問題,經過統計分析,對每個可信心拍以波峰為基準點,按照統一長度(個采樣點)進行標準重采樣。此外,由于是非接觸采集人體胸壁微動,不可避免在某些時段因本能體動或其他因素導致信號嚴重變異。因此,本研究中首先求取所有心拍均值得到該目標心拍模板,然后對于任意可信心拍依次求取其與模板心拍的歐氏距離和皮爾遜相關系數,在前期試驗發現選擇歐氏距離的閾值為1.2、皮爾遜相關系數的閾值為0.6足以在盡量保證數據量的前提下剔除變異性心拍。
(3)基于2D-PCA的多通道心拍矩陣特征提取:對于有效距離范圍多通道信號 ,經過心拍劃分和篩選后,每個心拍矩陣可表示為 ;其中 ,為4個有效距離通道; 為有效心拍序列索引;,為心拍采樣點。對于每個心拍矩陣(大小為 ),可以看做是在當前心拍時刻三維心臟運動在距離方向的投影,多通道之間互有關聯,隱含著一定的心臟結構關聯特點。為此,本研究采用2D-PCA,在有效保留心臟運動數據結構信息的同時提取每個心拍矩陣的內在特征,還可以起到降維效果。
1.2.3 基于心拍特征的身份識別
基于2D-PCA的多距離通道聯合編碼進行身份識別。對于多距離通道心拍矩陣,采用2D-PCA提取特征,進一步構建個體特征數據庫,可結合機器學習分類器進行模型訓練和身份識別。同時,以傳統的基于單一整條心拍數據為特征進行身份識別的方法作為參考方法。
2 實驗及結果
2.1 UWB雷達系統及數據采集
生物雷達傳感器采用Novelda公司研制的7.9 GHz超寬譜雷達傳感器X4M200(如圖5a所示),其關鍵參數如表1所示。考慮實際的應用場景后,數據采集時將人體與雷達距離定為0.55 m。
圖5
實驗系統及場景
a. 生物雷達傳感器;b. 數據采集實驗場景
Figure5. Experimental system and scenarioa. structure of bio-radar sensor; b. data acquisition experimental scene
本研究為探索性研究,故數據采集時更多考慮較為理想姿態下雷達探測心臟微動。隨機招募18例志愿者(年齡19~30歲,男性和女性各9名),實驗時志愿者平躺于地面且正對雷達,利用激光定位,保持雷達在心臟正上方,調節雷達與體表距離約為55 cm(如圖5b所示),每位志愿者按照統一指示進行數據采集。此外,為了對比呼吸行為對識別效果的影響,每位志愿者分別在正常呼吸和屏息兩種基本狀態下進行數據采集。實驗時,每位志愿者采集12組數據,正常呼吸狀態每組數據采集時長25 s,屏息狀態每組數據采集時長20 s。每組數據采集前后志愿者充分休息,恢復平靜。
2.2 心拍檢測實驗
基于雙小波聯合定位的心拍分割實驗。為驗證本文提出的雙小波聯合定位方法的有效性,以一段典型信號(如圖6a所示)為例,分別采用mexh小波變換和db1小波變換對信號進行波峰及波谷定位,結果如圖6b~c所示。
圖6
心拍定位實驗
a. 預處理信號;b. mexh小波變換定位結果;c. db1小波變換定位效果;d. 雙小波聯合定位效果
Figure6. Heartbeat localization experimenta. preprocessed signal; b. peak positioning based on mexh wavelet transform; c. peak positioning based on db1 wavelet transform; d. peak positioning based on dual wavelet joint positioning
可以發現,由于mexh小波更注重周期而對細節不敏感,當信號擾動時易發生漏檢(見圖6b)。另一方面,db1與雷達心臟信號在形態學上更為相似,對細節更加敏感,因而基于db1小波變換方法檢測時會出現嚴重多檢現象(見圖6c)。本文所采用雙小波聯合定位方法檢測結果如圖6d所示,可見能夠準確地定位出絕大部分波峰-波谷。
對于個體的每條心臟微動雷達回波,在進行波峰-波谷檢測及心拍分割后,即可得到個體心拍集合。圖7a~b所示為隨機選取兩位志愿者固定時段內的原始心拍集合。同時,在同一個體心拍集合中,可能由于某些時刻隨機環境干擾和身體微動影響,使得心拍信號發生變異而偏離個體本身穩定心拍特性,這將對心拍身份識別效果產生嚴重影響。
圖7
隨機2位志愿者A和B的心拍獲取與處理實驗
a-b. 個體心拍集合;c-d. 有效心拍篩選后的有效心拍集合;e-f. 異常心拍篩選前后各心拍與心拍模板的偏離情況(箱圖)
Figure7. The experiment on obtaining and processing heart beats of two random volunteers A and Ba-b. the individual heart beat set; c-d. screened effective heart beats; e-f. the deviation of each heart beat from corresponding heart beat template before and after abnormal heart beats screening (box diagram)
針對上述異常心拍問題,本研究提出構建心拍模板并結合歐氏距離和皮爾遜相關系數雙參數進行異常心拍剔除。以志愿者A和B原始心拍集合為例,可以發現與個體心拍整體趨勢偏離較大或變異嚴重的心拍經過篩選后被有效去除(圖7a~b vs. 圖7c~d)。為進一步量化評價心拍篩選的效果,本研究基于箱圖統計方法,對異常剔除前/后心拍集合在各采樣時刻上的數值與相應心拍模板的偏離情況進行統計分析(如圖7e~f所示)。可以發現,無論是志愿者A還是B,經過異常剔除后的各心拍各時刻采樣數值上-下限幅值差和上-下四分位數均明顯小于剔除前,表明剔除后有效心拍在任意采樣時刻上離散度更低、心拍信號更接近,這將有效改善后期基于連續心拍的身份識別效果。
2.3 身份識別模型訓練與測試實驗
基于2.1節描述的UWB雷達系統及數據情況,本研究結合前述預處理及心拍檢測流程,主要構建在正常呼吸和屏息兩種狀態下的三種雷達心臟微動回波特征方案,分別是:① 最佳距離單元&整條心拍特征(optimal range bins & heart beat,ORB-HB),即選取最佳距離單元信號進行心拍處理,且以整個有效心拍作為目標特征;② 多距離單元&整條心拍特征(multiple range bins & heart beat,MRB-HB),即選取有效距離范圍內的多距離單元信號分別進行心拍處理,同樣以整個有效心拍作為特征數據;③ 多距離單元& 2D-PCA特征(MRB & 2D-PCA),即選取有效距離范圍內多個距離單元信號分別進行心拍處理,構成回波通道-心拍采樣點2D矩陣,基于2D-PCA進行矩陣特征提取并作為特征數據。三種特征方案結合兩種呼吸狀態,共形成6種特征數據庫(正常呼吸狀態下ORB-HB、MRB-HB、MRB & 2D-PCA特征數據量分別為2 842組、10 641組、2 000組;屏息狀態下分別為2 676組、8 958組和2 000組)。
身份識別實驗中,將每個志愿者特征數據按照4∶1比例隨機劃分為訓練集和測試集,采用5折交叉驗證進行機器學習分類器訓練和識別性能測試。需要說明的是,對于個別數據庫存在略微欠對稱的問題,本研究并未進行補齊操作,且認為不會造成實質影響。此外,為了穩定驗證三種方案的身份識別效果,選取二次支持向量機(support vector machine,SVM)、三層神經網絡和k近鄰法(k-nearest neighbor,KNN)三種典型機器學習分類器進行身份識別實驗,采用準確率(Accuracy)和F1分數(F1-score)作為分類性能及效果的評估指標。
表2所示為兩種呼吸狀態下基于三種心拍特征方案結合三種典型分類器的身份識別結果。以二次SVM為例,正常呼吸狀態基于ORB-HB特征識別準確率為81.01%,MRB-HB特征識別準確率為56.81%,而本研究提出的MRB & 2D-PCA特征方案的身份識別準確率為89.21%,分別相對提高8.2%和32.4%;同時,在屏息狀態下,本文MRB & 2D-PCA特征方案的身份識別準確率為90.25%,相對兩種參考特征方案也分別提高5.95%和30.55%。基于三層神經網絡和KNN分類器的識別結果基本與上述情況一致。總體來看,本文提出的MRB & 2D-PCA特征表現出最優的識別效果(基于二次SVM和三次神經網絡分類器),相對ORB-HB特征方案識別準確率總體平均提高6.16%(正常呼吸6.84%、屏息5.48%),相對MRB-HB特征方案總體平均提高27.42%(正常呼吸28.63%、屏息26.21%)。結果證明了利用2D-PCA對距離通道-采樣點二維矩陣進行特征提取,相應特征具有更高的個體特異性和穩定性。
其次,盡管MRB-HB特征方案相較于ORB-HB特征方案在特征數據量上占有絕對優勢,通過有效距離范圍多通道擴充方式使得特征數量超出近4倍,但實際識別效果卻急劇惡化(三種分類器平均識別準確率在正常呼吸和屏息狀態分別下降19.08%和17.80%)。這可能是因為,在經過多通道數據擴充的同時,相鄰多通道數據的差異性劇增,對身份識別帶來的不利影響占據了主導,從而嚴重影響了分類器對個體特征的學習效果。
3 討論
實驗結果表明,本研究根據UWB雷達獲取的人體心臟體表區域的多點微動回波,基于MRB & 2D-PCA特征方案進行個體身份識別,有效提高了心紋身份識別準確率。與現有研究[17-18]將心臟體表微動看作單一點目標不同,本研究首次將心臟體表微動看成三維曲面微動,利用UWB高距離分辨率優勢獲取距離維多點信號,在每個心拍周期內構成通道-心拍采樣點圖像矩陣,該矩陣將蘊含心臟體表區域運動的結構性信息。此時,無論是取最優通道或將多通道信息孤立式對待,均無法提取完善且有效的特征信息用于身份識別。正如表2中結果所示,MRB-HB特征方案雖然通過數據擴充方式也利用了多通道數據,但識別效果卻嚴重惡化,甚至遠低于ORB-HB特征方案。而MRB & 2D-PCA特征方案從二維層面壓縮提取圖像矩陣的特征,一方面可有效保留心臟結構信息,另一方面可有效剔除圖像中的無用信息,提取出主要能量集中的低頻分量,降低數據維度,故其識別準確率也穩定高于前兩種參考方法。
本研究所用三種分類器均為最常規分類器,并未進行任何改進和優化,主要目的是以之作為穩定基礎,便于對三種特征方案在身份識別過程的效果進行對比測試。此外,三種分類器識別結果中SVM最優,神經網絡次之,KNN最差。這可能是因為本研究中身份識別特征數據均為生理趨勢相近的心拍數據,而KNN算法僅通過找到數據集中距離待測樣本最近的K個值,再利用這K個值投票作為待測樣本的預測結果來進行分類,并不會像SVM將樣本映射到高維特征空間,使得樣本在高維空間線性可分而實現分類,導致KNN分類準確率相對較低。
此外,本研究基于UWB生物雷達獲取人體心臟體表區域多點微動特征進行身份分類識別的初步探索,所利用的回波數據特征僅局限于時域特征,而相關研究[19]表明心臟微動雷達回波在其他信號域中具有識別度更高的特征分布特點,因此后續研究可綜合時域、頻域、多普勒域等特征,進行多域特征融合識別。此外,本研究進行身份識別時僅以標準分類器為基礎,后續研究可結合深度學習[20]來深度挖掘信號多域特征。
4 結論
本研究基于UWB生物雷達系統非接觸探測人體心臟運動引起的體表三維曲面微動,構建了基于UWB雷達心臟微動感知實現人體身份識別信號的處理框架,并對三種類型心拍特征方案的身份識別效果進行了分析對比。在改進心拍檢測和有效心拍篩選的基礎上,本研究首次提出基于MRB & 2D-PCA的心拍特征方案,即對于每個心拍周期內的通道-心拍采樣數二維圖像矩陣,利用2D-PCA從二維層面壓縮提取特征。實測試驗中,為了驗證本研究所提特征方案的有效性,采用最佳距離單元&整個心拍特征方案和多距離單元&整條心拍特征方案作為參考,結合二次SVM、三層神經網絡和KNN作為典型分類器進行身份識別,本文所提MRB & 2D-PCA特征方案表現出最優識別效果。本研究初步實現了基于UWB生物雷達心臟微動感知的身份識別,并首次從理論和實測兩方面論證了MRB & 2D-PCA特征方案的合理性和有效性。
重要聲明
利益沖突聲明:本文全體作者均聲明不存在利益沖突。
作者貢獻聲明:黃瑋、王可涵主要負責實驗設計及數據采集,任偉、李釗負責部分算法設計,祁富貴負責研究方案制定和論文寫作,王健琪、路國華負責研究整體指導。
倫理聲明:本研究通過第四軍醫大學第一附屬醫院醫學倫理委員會的審批。