


引用本文: 王斌, 蔡興博, 張悅, 張必歡, 徐永清. 定制化鈦合金人工月骨假體的三維有限元模型建立及生物力學分析. 中國修復重建外科雜志, 2023, 37(7): 821-826. doi: 10.7507/1002-1892.202301039 復制
版權信息: ?四川大學華西醫院華西期刊社《中國修復重建外科雜志》版權所有,未經授權不得轉載、改編
Kienb?ck病,也稱為月骨無菌性壞死、月骨缺血性壞死或月骨軟化癥,是一種進行性破壞性病理過程,可導致患者腕部慢性疼痛和功能障礙。對于早期保守治療無效或癥狀較重患者可選擇手術治療,以盡可能恢復月骨的血運和形態,主要術式包括截骨術、骨移植術、肌腱填塞術、關節融合術和假體置換術等[1]。與其他術式相比,假體置換術具有能重建解剖結構、保持腕部高度和活動度、預防進一步腕關節塌陷、改善疼痛癥狀的優點,但是也存在術后假體松動、腕關節退行性改變等情況,影響療效[2]。Kanatani等[3]及Viljakka等[4]的臨床長期隨訪研究顯示,人工硅橡膠月骨假體置換治療Kienb?ck病后患者易出現腕關節退變和腕管綜合征等問題,提示該類月骨假體不適用于Kienb?ck病。有學者研究發現骨水泥假體能有效終止腕骨塌陷、緩解疼痛癥狀、改善手部功能并延緩病情進展,同時在易用性、安全性和經濟方面具有一定優勢,但同樣存在遠期腕關節退變等問題[5]。而上述問題的出現與假體和周圍骨匹配度不高、組織無法長入等因素有關,為此設計并制備個體化以及具有較高穩定性的假體成為研究焦點。近年3D打印技術的發展與廣泛應用,也為根據患者個體解剖結構和需求定制個體化假體奠定了技術基礎。
本團隊前期3D打印微孔鈦人工腕關節臨床研究發現,個體化設計假體能與髓腔精準匹配,獲得良好初始穩定性;同時假體微孔結構允許骨長入,可增加假體穩定性,降低遠期松動風險[6]。馬天曉[7]研究發現3D 打印多孔結構材料可以與軟組織形成有效、緊密且穩定的生物學連接,獲得高質量軟組織重建效果,在此基礎上有望制備個性化、能牢固固定及生物相容性良好的假體,滿足患者對肢體功能日益增高的需求。結合上述研究發現,我們對人工月骨假體的設計提出了“定制化”和“軟組織長入”兩個目標。本研究基于人腕關節尸體標本,設計定制化鈦合金人工月骨假體,并采用有限元分析技術行置換前后腕關節生物力學分析,探討該假體設計理念可行性,為下一步臨床研究奠定基礎。
1 材料與方法
1.1 實驗標本
新鮮冰凍人體右前臂標本1具,由昆明醫科大學海源學院解剖教研室提供,經腕關節X線片、CT檢查排除骨折、腫瘤等影響腕關節結構的疾病,置于–20℃保存,實驗前24 h取出于室溫下解凍。
標本活動度測量:剔除標本近、遠端部分軟組織,顯露骨性結構并使用聚甲基丙烯酸甲酯包埋固定,頭狀骨、橈骨遠端各植入1枚攜帶4枚熒光標記球、直徑2.0 mm的克氏針。將標本用夾具夾持固定于活動度測試實驗臺上,在掌屈、背伸、尺偏、橈偏4個方向上對腕關節施加4 N·m力矩,于cortex動作捕捉系統測量腕關節上述4個方向最大活動度分別為48.42°、38.04°、35.68°、26.41°。
1.2 實驗儀器及軟件
LigntSpeed 64排螺旋CT(General Electric公司,美國);cortex動作捕捉系統(Motion Analysis 公司,美國)。 Mimics21.0軟件、 Magics21.0軟件(Materialise公司,比利時);Geomagic Studio 2017軟件(Raindrop公司,美國);Solidworks 2017軟件(Dassault Systemes公司,法國);ANSYS17.0有限元分析軟件(ANSYS公司,美國)。
1.3 定制化鈦合金人工月骨假體設計
采用64排螺旋CT對前臂標本腕關節進行掃描,掃描范圍包括手、腕關節及尺、橈骨遠端,掃描參數:120 kV,350 mA,層厚 0.625 mm。將獲得的CT數據以 DICOM 格式導入 Mimics21.0 軟件,依據不同組織灰度值進行自動化閾值分割區分,初步分離腕關節周圍腕骨、掌骨及尺、橈骨;利用 mask 功能對腕骨、掌骨及尺、橈骨進行細化填充;利用手工編輯圖層工具擦除上述骨塊表面凸起及補足其凹陷部分;分別進行 wrap 和 smoothing 處理,初步建立腕關節三維模型。將獲得的腕關節模型數據以 STL 格式導入Magics21.0 軟件中對月骨進行三維重建,并按照1∶1比例設計月骨假體。
月骨假體頭月關節面、橈月關節面設計為光滑面,形成頭月關節、橈月關節,利于置換術后最大限度恢復腕關節活動度;舟月關節面、月三角關節面為孔隙面,利于置換術后軟組織爬行附著,增加假體穩定性。于假體掌側面設計穿線孔,體內生物力學試驗及臨床應用時可使用肌腱線將假體縫合在掌側軟組織(尺三角韌帶、橈三角韌帶、橈舟月韌帶等),達到假體柔性固定,保留腕關節最大活動度。見圖1。
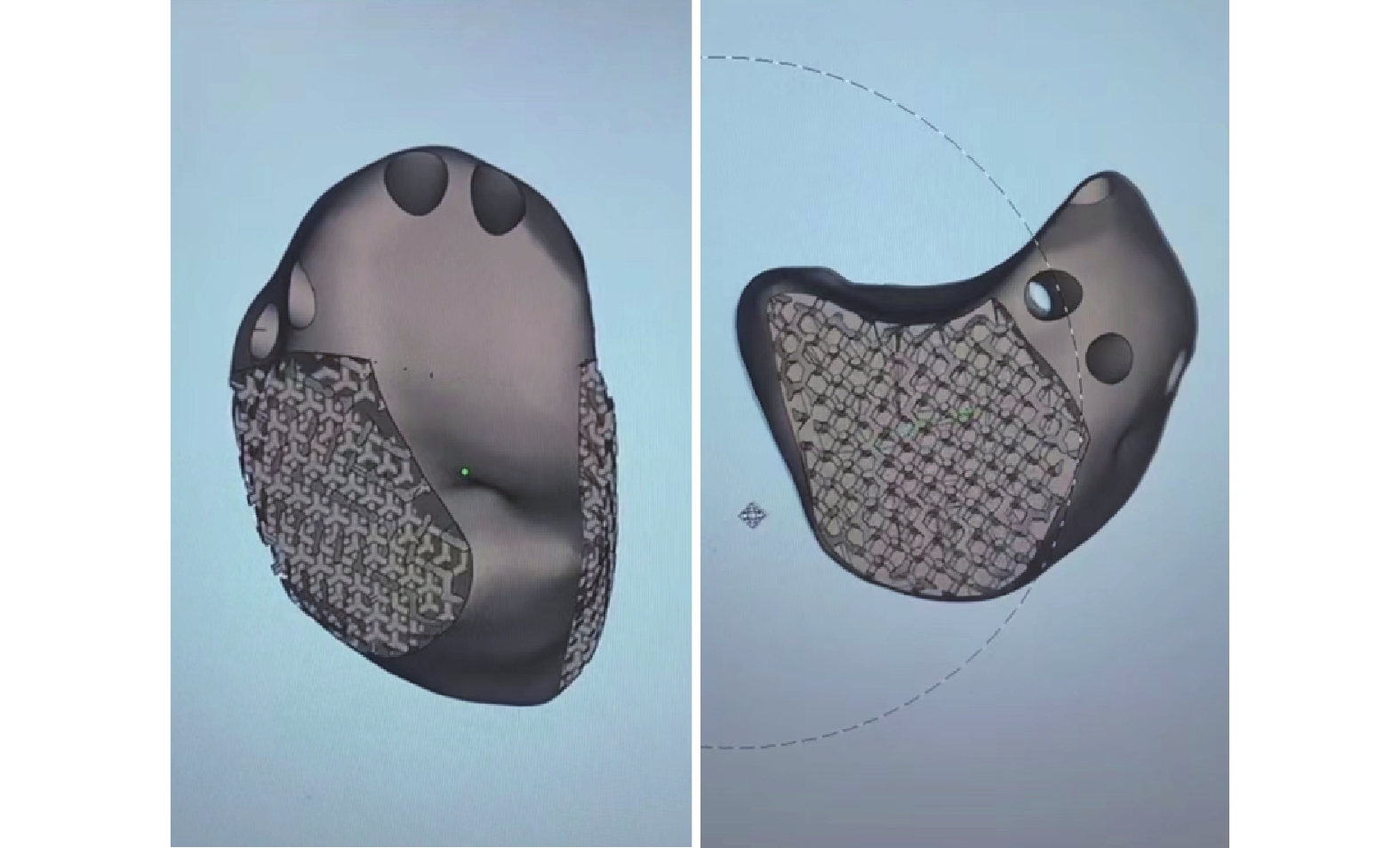 圖1
定制化鈦合金人工月骨假體示意圖
Figure1.
Schematic diagram of the customized titanium alloy lunate prosthesis
圖1
定制化鈦合金人工月骨假體示意圖
Figure1.
Schematic diagram of the customized titanium alloy lunate prosthesis
1.4 定制化鈦合金人工月骨假體置換術前后三維有限元模型建立
將1.3獲得的腕關節三維模型以STL 格式導入Geomagic Studio 2017軟件。在軟件中抹去模型釘狀物和多余特征,行優化光滑處理,通過精確曲面等過程進行曲面化后生成幾何模型,以STP格式導入Solidworks 2017軟件。在軟件中對幾何模型進行特征識別和曲面診斷,對有問題的曲面進行修復,在裝配界面將術前正常腕關節模型的皮質骨、松質骨和術后置換模型的皮質骨、松質骨、假體分別裝配完成;將模型保存為SLDPRT零件格式文件后創建軟骨,再根據正常人體切除多余部分組織,最后進行干涉處理獲得正常腕關節模型和定制鈦合金人工月骨假體置換術后腕關節模型。
將生成的體網格模型以X-T格式導入ANSYS17.0有限元分析軟件,建立Static Structural靜力分析模塊,分別建立皮質骨、松質骨、軟骨及假體屬性參數[8-9],彈性模量分別為18 000、100、10、2.1×105 MPa,泊松比分別為0.3、0.3、0.45、0.3。假體由鈦合金(Ti-6Al-4V ELI)制成,骨間韌帶剛度系數參考Bajuri等[10]設定,然后對模型進行網格劃分。見圖2。
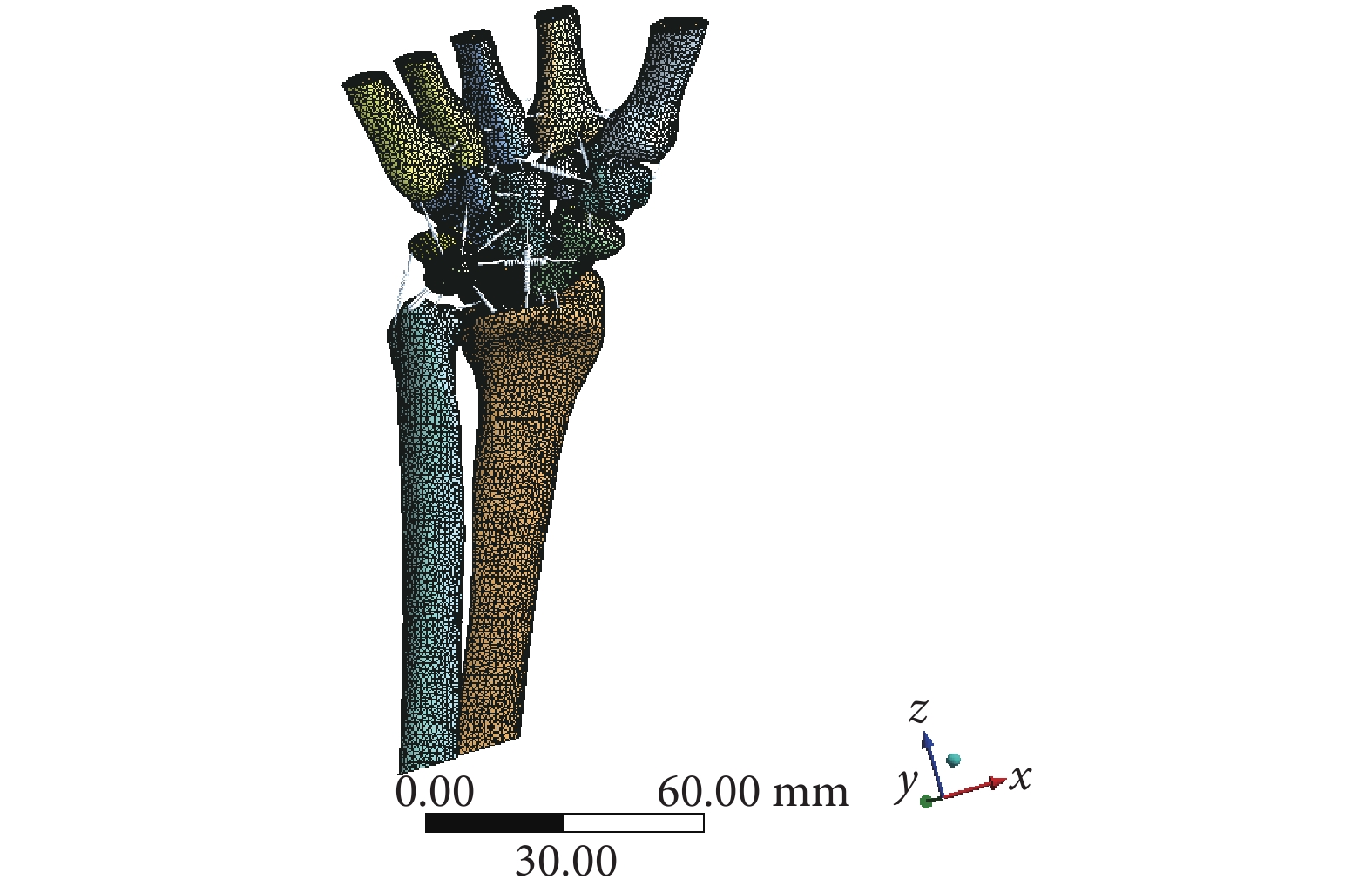 圖2
置換前網格模型示意圖
Figure2.
Diagram of grid model before replacement
圖2
置換前網格模型示意圖
Figure2.
Diagram of grid model before replacement
1.5 載荷加載及觀測
于ANSYS 17.0有限元分析軟件中,分別對置換前后腕關節三維有限元模型進行分析,對橈骨和尺骨近端施加約束,以協助解決模型收縮。固定腕掌關節及肌腱止點(拇長展肌、橈側腕屈肌、尺側腕屈肌、尺側腕伸肌、橈側短腕伸肌、橈側長腕伸肌),防止x、y軸方向運動,使所有骨骼(不包括橈骨和尺骨)均能在施加載荷方向上運動;載荷施加于掌骨遠端,參考Gíslason等[11]研究分別在第1、2、3、4、5掌骨遠端施加225.60、120.30、106.40、88.00、77.30 N載荷,方向垂直于受力面,模擬腕關節靜態握力。為研究置換術后腕關節應力及形變變化趨勢,在腕關節標本最大活動度基礎上,最終選取掌屈15°、30°、48.42°,背伸15°、30°、38.04°,尺偏10°、20°、35.68°,橈偏5°、15°、26.41° 進行分析,觀測指標包括置換術前后腕關節應力分布及形變,以及正常月骨和月骨假體的應力分布情況。
2 結果
2.1 三維有限元模型構建
研究成功構建正常腕關節和定制鈦合金人工月骨假體置換術后腕關節三維有限元模型(正常模型、置換模型)。正常模型包括掌骨、腕骨、尺骨、橈骨、軟骨以及骨間韌帶,關節中立位模型共包括445 868個節點、260 041個網格;置換模型僅月骨假體替換正常月骨,關節中立位模型共包括556 379個節點、337 945個網格。掌屈、背伸、尺偏、橈偏方向不同活動度的模型網格劃分節點數及網格數存在一定差異,詳見表1。
2.2 生物力學分析
在掌屈、背伸、尺偏、橈偏方向,正常模型及置換模型腕關節最大形變均發生于橈側,即舟骨、大多角骨、小多角骨及第1掌骨處,且形變程度均隨活動度增大而逐漸增大;腕關節最大應力亦隨活動度增大而逐漸增大,在最大活動度下應力均集中于橈骨近端,整體表現為由橈側腕骨向橈骨近端移動的趨勢。見表2及圖3、4。
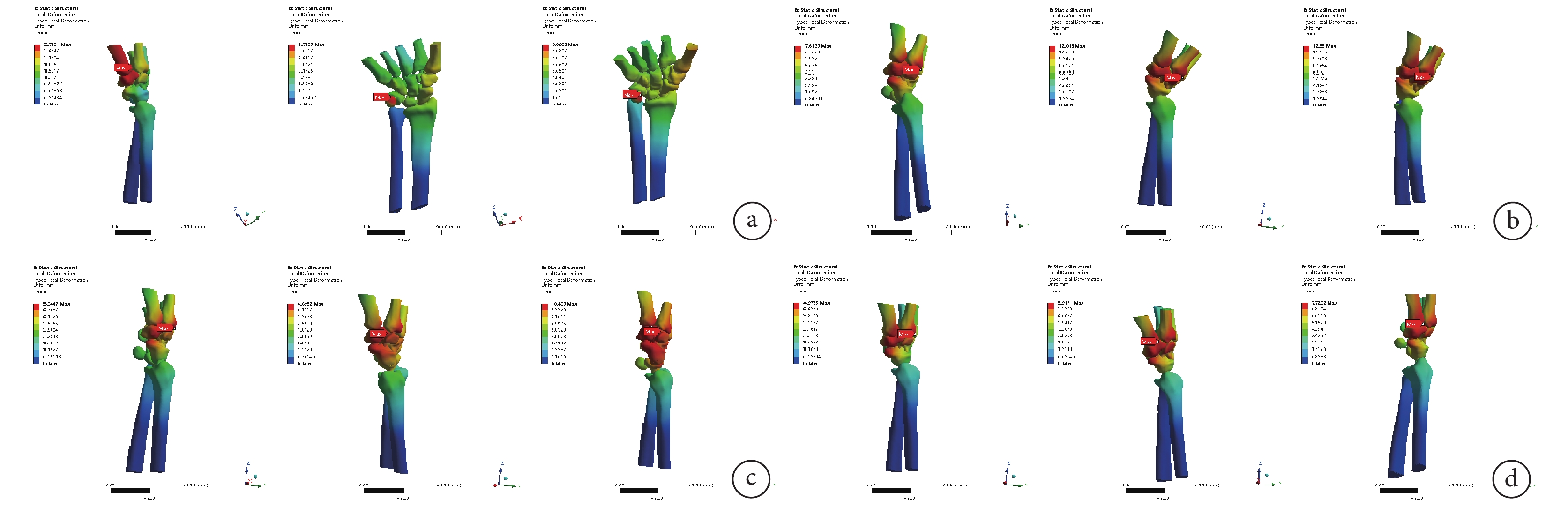 圖3
正常模型不同方向腕關節形變
圖3
正常模型不同方向腕關節形變
a. 掌屈;b. 背伸;c. 尺偏;d. 橈偏
Figure3. Deformation of the normal model in different directionsa. Flexion; b. Extension; c. Ulnar deviation; d. Radial deviation
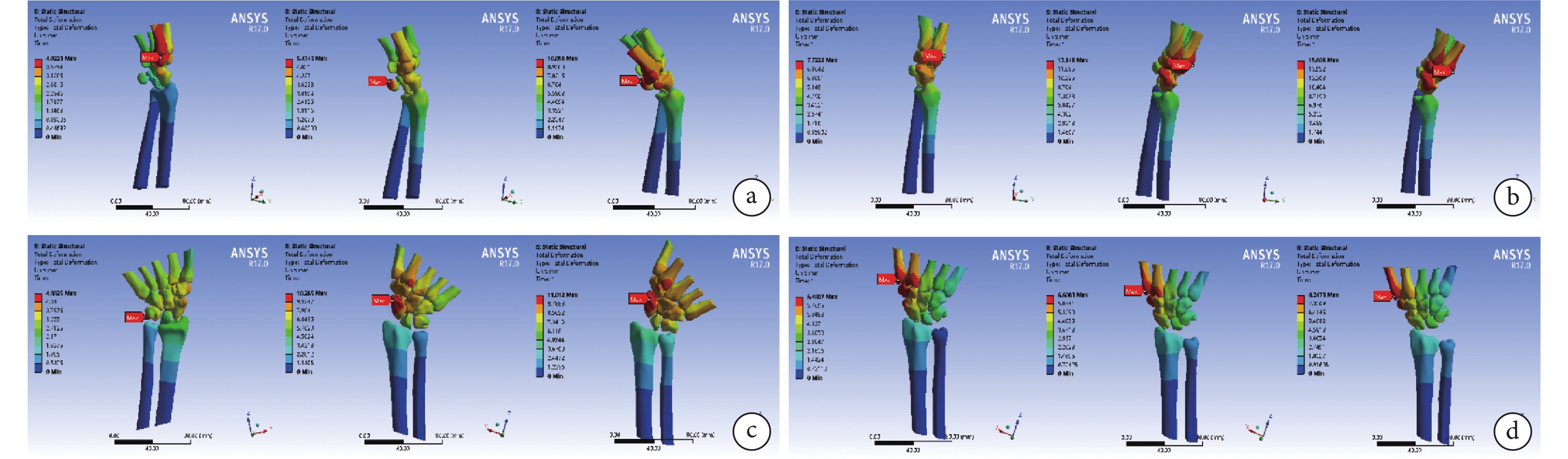 圖4
置換模型不同方向腕關節形變
圖4
置換模型不同方向腕關節形變
a. 掌屈;b. 背伸;c. 尺偏;d. 橈偏
Figure4. Deformation of the replacement model in different directionsa. Flexion; b. Extension; c. Ulnar deviation; d. Radial deviation
在掌屈、背伸、尺偏、橈偏方向,正常月骨最大應力均活動度增大而逐漸增大,且應力位置也發生改變。而月骨假體最大應力均集中在假體尺側,背伸時隨活動度增大逐漸增大,掌屈、尺偏、橈偏時則整體表現為隨活動度增大而逐漸減小。月骨假體所受應力較正常月骨明顯增大。見表3。
3 討論
本研究基于人腕關節標本設計了定制化鈦合金人工月骨假體,并采用有限元分析對置換前后生物力學進行分析。目前,有關腕關節有限元分析研究構建的模型均不夠全面或參數賦值不夠精細。例如,張浩等[12]研究中為減少運算量,構建的三維有限元模型僅包括了骨與軟骨,未進行肌腱及韌帶建模。魏明杰等[13]的舟月骨間韌帶應力分布研究中,為減少運算量,構建的三維有限元模型僅包括腕骨及尺、橈骨遠端組織,不同方向載荷加載是通過在腕骨上繞x、y軸加載角位移模擬,并未重建掌骨以及在掌骨上施加載荷以模擬正常腕關節握力,同時不同韌帶為同一參數,未根據實際情況對不同韌帶參數進行具體賦值。Gholamian等[14]對橈骨遠端關節假體進行生物力學分析時,未考慮腕關節骨和韌帶。通過總結上述有限元分析研究建模不足,本研究重建了腕骨、掌骨及尺、橈骨遠端骨質結構,并對腕掌側韌帶、腕尺側副韌帶、尺三角韌帶、橈三角韌帶、橈舟頭韌帶、舟頭韌帶等腕骨間、腕骨掌骨間、腕骨與尺橈骨間的關節軟骨和骨間韌帶進行了完整重建,并對不同韌帶參數進行具體賦值,從而使模型更貼近實際。同時,現有研究大多采用腕關節中立位模型進行有限元分析。例如,Bajuri等[15]通過構建中立位正常腕關節模型和類風濕性腕關節炎模型比較應力分布差異;Gislason等[16]通過構建中立位Universal 2腕關節假體置換后腕關節模型,分析假體、腕骨及橈骨遠端應力分布情況。而本研究構建了不同方向梯度活動度的腕關節三維有限元模型,并對其進行形變和應力分布分析,以期探究在腕關節運動過程中形變及應力變化趨勢。同時分析月骨置換手術前后有無載荷傳遞模式的改變,是否對腕關節造成影響,以評估假體安全性和有效性。
腕關節負荷轉移是腕關節生物力學的一個重要因素,載荷傳遞模式對于理解正常關節生物力學和解釋骨關節炎[17]或Kienb?ck病[18-19]等疾病的發病機制具有重要指導意義。本研究結果顯示,在運動度逐漸增大情況下,腕關節形變及應力均呈逐漸增大趨勢。腕關節形變及應力位置主要在橈側,包括橈骨、舟骨、大多角骨、小多角骨及第1掌骨,與Schuind等[20]和Genda等[21]的研究結論一致,即腕關節載荷傳遞主要通過橈、舟骨完成,并且在載荷傳遞過程中,橈、舟骨產生了最大形變。同時Genda等[21]的研究發現腕關節輕度背伸時,通過月骨的負荷顯著增加。本研究正常月骨及月骨假體背伸時均表現出應力升高,與上述文獻報道相符。我們認為置換術后腕關節橈側柱仍為載荷傳遞主要通道,術前和術后腕關節整體應力的變化趨勢基本一致,表明本研究設計的定制化鈦合金人工月骨假體未改變腕關節載荷傳遞模式。
本研究結果顯示術后月骨假體所受應力較正常月骨明顯增大,我們分析可能有以下幾點原因:① 因假體植入后與周圍韌帶之間經肌腱線縫合柔性固定,所以與周圍骨組織之間的緊密度降低,從而增加了假體運動幅度,導致應力增大。② 假體模型重建時無法將假體尺、橈側孔隙面進行完整重建,假體與周圍骨組織匹配度不佳,模型顯示假體過小,導致應力集中。③ 月骨假體為鈦合金材質,硬度較正常骨組織明顯增大,在假體與周圍骨組織接觸時更容易發生應力集中。
綜上述,本研究設計的定制化鈦合金人工月骨假體可行。但是本研究存在以下不足:首先,研究模型選取腕關節活動度有限,而且是靜態模擬,不能完全反映腕關節運動過程以及在運動過程中應力和形變的變化。其次,在假體設計方面,掌側穿線孔可用于將假體柔性固定于掌側軟組織,但是該柔性固定不能在本研究三維有限元模型中完全體現。因此,在今后的研究中需要進一步探討和改進有限元分析技術,以更準確地模擬腕關節在運動過程中的應力和形變變化,為臨床試驗提供更多參考依據,以提高人工月骨假體置換術的安全性和有效性。
利益沖突 在課題研究和文章撰寫過程中不存在利益沖突;經費支持沒有影響文章觀點和對研究數據客觀結果的統計分析及其報道
倫理聲明 研究方案經中國人民解放軍聯勤保障部隊第九二〇醫院倫理委員會批準[倫審 2021-005(科)-02]
作者貢獻聲明 王斌:文章構思、研究整體設計及論文撰寫;蔡興博:參與研究設計并整理研究數據;張悅、張必歡:文獻收集及文章審校;徐永清:實驗設計指導
Kienb?ck病,也稱為月骨無菌性壞死、月骨缺血性壞死或月骨軟化癥,是一種進行性破壞性病理過程,可導致患者腕部慢性疼痛和功能障礙。對于早期保守治療無效或癥狀較重患者可選擇手術治療,以盡可能恢復月骨的血運和形態,主要術式包括截骨術、骨移植術、肌腱填塞術、關節融合術和假體置換術等[1]。與其他術式相比,假體置換術具有能重建解剖結構、保持腕部高度和活動度、預防進一步腕關節塌陷、改善疼痛癥狀的優點,但是也存在術后假體松動、腕關節退行性改變等情況,影響療效[2]。Kanatani等[3]及Viljakka等[4]的臨床長期隨訪研究顯示,人工硅橡膠月骨假體置換治療Kienb?ck病后患者易出現腕關節退變和腕管綜合征等問題,提示該類月骨假體不適用于Kienb?ck病。有學者研究發現骨水泥假體能有效終止腕骨塌陷、緩解疼痛癥狀、改善手部功能并延緩病情進展,同時在易用性、安全性和經濟方面具有一定優勢,但同樣存在遠期腕關節退變等問題[5]。而上述問題的出現與假體和周圍骨匹配度不高、組織無法長入等因素有關,為此設計并制備個體化以及具有較高穩定性的假體成為研究焦點。近年3D打印技術的發展與廣泛應用,也為根據患者個體解剖結構和需求定制個體化假體奠定了技術基礎。
本團隊前期3D打印微孔鈦人工腕關節臨床研究發現,個體化設計假體能與髓腔精準匹配,獲得良好初始穩定性;同時假體微孔結構允許骨長入,可增加假體穩定性,降低遠期松動風險[6]。馬天曉[7]研究發現3D 打印多孔結構材料可以與軟組織形成有效、緊密且穩定的生物學連接,獲得高質量軟組織重建效果,在此基礎上有望制備個性化、能牢固固定及生物相容性良好的假體,滿足患者對肢體功能日益增高的需求。結合上述研究發現,我們對人工月骨假體的設計提出了“定制化”和“軟組織長入”兩個目標。本研究基于人腕關節尸體標本,設計定制化鈦合金人工月骨假體,并采用有限元分析技術行置換前后腕關節生物力學分析,探討該假體設計理念可行性,為下一步臨床研究奠定基礎。
1 材料與方法
1.1 實驗標本
新鮮冰凍人體右前臂標本1具,由昆明醫科大學海源學院解剖教研室提供,經腕關節X線片、CT檢查排除骨折、腫瘤等影響腕關節結構的疾病,置于–20℃保存,實驗前24 h取出于室溫下解凍。
標本活動度測量:剔除標本近、遠端部分軟組織,顯露骨性結構并使用聚甲基丙烯酸甲酯包埋固定,頭狀骨、橈骨遠端各植入1枚攜帶4枚熒光標記球、直徑2.0 mm的克氏針。將標本用夾具夾持固定于活動度測試實驗臺上,在掌屈、背伸、尺偏、橈偏4個方向上對腕關節施加4 N·m力矩,于cortex動作捕捉系統測量腕關節上述4個方向最大活動度分別為48.42°、38.04°、35.68°、26.41°。
1.2 實驗儀器及軟件
LigntSpeed 64排螺旋CT(General Electric公司,美國);cortex動作捕捉系統(Motion Analysis 公司,美國)。 Mimics21.0軟件、 Magics21.0軟件(Materialise公司,比利時);Geomagic Studio 2017軟件(Raindrop公司,美國);Solidworks 2017軟件(Dassault Systemes公司,法國);ANSYS17.0有限元分析軟件(ANSYS公司,美國)。
1.3 定制化鈦合金人工月骨假體設計
采用64排螺旋CT對前臂標本腕關節進行掃描,掃描范圍包括手、腕關節及尺、橈骨遠端,掃描參數:120 kV,350 mA,層厚 0.625 mm。將獲得的CT數據以 DICOM 格式導入 Mimics21.0 軟件,依據不同組織灰度值進行自動化閾值分割區分,初步分離腕關節周圍腕骨、掌骨及尺、橈骨;利用 mask 功能對腕骨、掌骨及尺、橈骨進行細化填充;利用手工編輯圖層工具擦除上述骨塊表面凸起及補足其凹陷部分;分別進行 wrap 和 smoothing 處理,初步建立腕關節三維模型。將獲得的腕關節模型數據以 STL 格式導入Magics21.0 軟件中對月骨進行三維重建,并按照1∶1比例設計月骨假體。
月骨假體頭月關節面、橈月關節面設計為光滑面,形成頭月關節、橈月關節,利于置換術后最大限度恢復腕關節活動度;舟月關節面、月三角關節面為孔隙面,利于置換術后軟組織爬行附著,增加假體穩定性。于假體掌側面設計穿線孔,體內生物力學試驗及臨床應用時可使用肌腱線將假體縫合在掌側軟組織(尺三角韌帶、橈三角韌帶、橈舟月韌帶等),達到假體柔性固定,保留腕關節最大活動度。見圖1。
圖1
定制化鈦合金人工月骨假體示意圖
Figure1.
Schematic diagram of the customized titanium alloy lunate prosthesis
1.4 定制化鈦合金人工月骨假體置換術前后三維有限元模型建立
將1.3獲得的腕關節三維模型以STL 格式導入Geomagic Studio 2017軟件。在軟件中抹去模型釘狀物和多余特征,行優化光滑處理,通過精確曲面等過程進行曲面化后生成幾何模型,以STP格式導入Solidworks 2017軟件。在軟件中對幾何模型進行特征識別和曲面診斷,對有問題的曲面進行修復,在裝配界面將術前正常腕關節模型的皮質骨、松質骨和術后置換模型的皮質骨、松質骨、假體分別裝配完成;將模型保存為SLDPRT零件格式文件后創建軟骨,再根據正常人體切除多余部分組織,最后進行干涉處理獲得正常腕關節模型和定制鈦合金人工月骨假體置換術后腕關節模型。
將生成的體網格模型以X-T格式導入ANSYS17.0有限元分析軟件,建立Static Structural靜力分析模塊,分別建立皮質骨、松質骨、軟骨及假體屬性參數[8-9],彈性模量分別為18 000、100、10、2.1×105 MPa,泊松比分別為0.3、0.3、0.45、0.3。假體由鈦合金(Ti-6Al-4V ELI)制成,骨間韌帶剛度系數參考Bajuri等[10]設定,然后對模型進行網格劃分。見圖2。
圖2
置換前網格模型示意圖
Figure2.
Diagram of grid model before replacement
1.5 載荷加載及觀測
于ANSYS 17.0有限元分析軟件中,分別對置換前后腕關節三維有限元模型進行分析,對橈骨和尺骨近端施加約束,以協助解決模型收縮。固定腕掌關節及肌腱止點(拇長展肌、橈側腕屈肌、尺側腕屈肌、尺側腕伸肌、橈側短腕伸肌、橈側長腕伸肌),防止x、y軸方向運動,使所有骨骼(不包括橈骨和尺骨)均能在施加載荷方向上運動;載荷施加于掌骨遠端,參考Gíslason等[11]研究分別在第1、2、3、4、5掌骨遠端施加225.60、120.30、106.40、88.00、77.30 N載荷,方向垂直于受力面,模擬腕關節靜態握力。為研究置換術后腕關節應力及形變變化趨勢,在腕關節標本最大活動度基礎上,最終選取掌屈15°、30°、48.42°,背伸15°、30°、38.04°,尺偏10°、20°、35.68°,橈偏5°、15°、26.41° 進行分析,觀測指標包括置換術前后腕關節應力分布及形變,以及正常月骨和月骨假體的應力分布情況。
2 結果
2.1 三維有限元模型構建
研究成功構建正常腕關節和定制鈦合金人工月骨假體置換術后腕關節三維有限元模型(正常模型、置換模型)。正常模型包括掌骨、腕骨、尺骨、橈骨、軟骨以及骨間韌帶,關節中立位模型共包括445 868個節點、260 041個網格;置換模型僅月骨假體替換正常月骨,關節中立位模型共包括556 379個節點、337 945個網格。掌屈、背伸、尺偏、橈偏方向不同活動度的模型網格劃分節點數及網格數存在一定差異,詳見表1。
2.2 生物力學分析
在掌屈、背伸、尺偏、橈偏方向,正常模型及置換模型腕關節最大形變均發生于橈側,即舟骨、大多角骨、小多角骨及第1掌骨處,且形變程度均隨活動度增大而逐漸增大;腕關節最大應力亦隨活動度增大而逐漸增大,在最大活動度下應力均集中于橈骨近端,整體表現為由橈側腕骨向橈骨近端移動的趨勢。見表2及圖3、4。
圖3
正常模型不同方向腕關節形變
a. 掌屈;b. 背伸;c. 尺偏;d. 橈偏
Figure3. Deformation of the normal model in different directionsa. Flexion; b. Extension; c. Ulnar deviation; d. Radial deviation
圖4
置換模型不同方向腕關節形變
a. 掌屈;b. 背伸;c. 尺偏;d. 橈偏
Figure4. Deformation of the replacement model in different directionsa. Flexion; b. Extension; c. Ulnar deviation; d. Radial deviation
在掌屈、背伸、尺偏、橈偏方向,正常月骨最大應力均活動度增大而逐漸增大,且應力位置也發生改變。而月骨假體最大應力均集中在假體尺側,背伸時隨活動度增大逐漸增大,掌屈、尺偏、橈偏時則整體表現為隨活動度增大而逐漸減小。月骨假體所受應力較正常月骨明顯增大。見表3。
3 討論
本研究基于人腕關節標本設計了定制化鈦合金人工月骨假體,并采用有限元分析對置換前后生物力學進行分析。目前,有關腕關節有限元分析研究構建的模型均不夠全面或參數賦值不夠精細。例如,張浩等[12]研究中為減少運算量,構建的三維有限元模型僅包括了骨與軟骨,未進行肌腱及韌帶建模。魏明杰等[13]的舟月骨間韌帶應力分布研究中,為減少運算量,構建的三維有限元模型僅包括腕骨及尺、橈骨遠端組織,不同方向載荷加載是通過在腕骨上繞x、y軸加載角位移模擬,并未重建掌骨以及在掌骨上施加載荷以模擬正常腕關節握力,同時不同韌帶為同一參數,未根據實際情況對不同韌帶參數進行具體賦值。Gholamian等[14]對橈骨遠端關節假體進行生物力學分析時,未考慮腕關節骨和韌帶。通過總結上述有限元分析研究建模不足,本研究重建了腕骨、掌骨及尺、橈骨遠端骨質結構,并對腕掌側韌帶、腕尺側副韌帶、尺三角韌帶、橈三角韌帶、橈舟頭韌帶、舟頭韌帶等腕骨間、腕骨掌骨間、腕骨與尺橈骨間的關節軟骨和骨間韌帶進行了完整重建,并對不同韌帶參數進行具體賦值,從而使模型更貼近實際。同時,現有研究大多采用腕關節中立位模型進行有限元分析。例如,Bajuri等[15]通過構建中立位正常腕關節模型和類風濕性腕關節炎模型比較應力分布差異;Gislason等[16]通過構建中立位Universal 2腕關節假體置換后腕關節模型,分析假體、腕骨及橈骨遠端應力分布情況。而本研究構建了不同方向梯度活動度的腕關節三維有限元模型,并對其進行形變和應力分布分析,以期探究在腕關節運動過程中形變及應力變化趨勢。同時分析月骨置換手術前后有無載荷傳遞模式的改變,是否對腕關節造成影響,以評估假體安全性和有效性。
腕關節負荷轉移是腕關節生物力學的一個重要因素,載荷傳遞模式對于理解正常關節生物力學和解釋骨關節炎[17]或Kienb?ck病[18-19]等疾病的發病機制具有重要指導意義。本研究結果顯示,在運動度逐漸增大情況下,腕關節形變及應力均呈逐漸增大趨勢。腕關節形變及應力位置主要在橈側,包括橈骨、舟骨、大多角骨、小多角骨及第1掌骨,與Schuind等[20]和Genda等[21]的研究結論一致,即腕關節載荷傳遞主要通過橈、舟骨完成,并且在載荷傳遞過程中,橈、舟骨產生了最大形變。同時Genda等[21]的研究發現腕關節輕度背伸時,通過月骨的負荷顯著增加。本研究正常月骨及月骨假體背伸時均表現出應力升高,與上述文獻報道相符。我們認為置換術后腕關節橈側柱仍為載荷傳遞主要通道,術前和術后腕關節整體應力的變化趨勢基本一致,表明本研究設計的定制化鈦合金人工月骨假體未改變腕關節載荷傳遞模式。
本研究結果顯示術后月骨假體所受應力較正常月骨明顯增大,我們分析可能有以下幾點原因:① 因假體植入后與周圍韌帶之間經肌腱線縫合柔性固定,所以與周圍骨組織之間的緊密度降低,從而增加了假體運動幅度,導致應力增大。② 假體模型重建時無法將假體尺、橈側孔隙面進行完整重建,假體與周圍骨組織匹配度不佳,模型顯示假體過小,導致應力集中。③ 月骨假體為鈦合金材質,硬度較正常骨組織明顯增大,在假體與周圍骨組織接觸時更容易發生應力集中。
綜上述,本研究設計的定制化鈦合金人工月骨假體可行。但是本研究存在以下不足:首先,研究模型選取腕關節活動度有限,而且是靜態模擬,不能完全反映腕關節運動過程以及在運動過程中應力和形變的變化。其次,在假體設計方面,掌側穿線孔可用于將假體柔性固定于掌側軟組織,但是該柔性固定不能在本研究三維有限元模型中完全體現。因此,在今后的研究中需要進一步探討和改進有限元分析技術,以更準確地模擬腕關節在運動過程中的應力和形變變化,為臨床試驗提供更多參考依據,以提高人工月骨假體置換術的安全性和有效性。
利益沖突 在課題研究和文章撰寫過程中不存在利益沖突;經費支持沒有影響文章觀點和對研究數據客觀結果的統計分析及其報道
倫理聲明 研究方案經中國人民解放軍聯勤保障部隊第九二〇醫院倫理委員會批準[倫審 2021-005(科)-02]
作者貢獻聲明 王斌:文章構思、研究整體設計及論文撰寫;蔡興博:參與研究設計并整理研究數據;張悅、張必歡:文獻收集及文章審校;徐永清:實驗設計指導



