引用本文: 廖江波, 代永鴻, 吳征杰, 曾焰輝, 李燦輝, 王學霖, 王軍強, 趙春鵬, 吳新寶. 復位機器人聯合導航機器人輔助微創治療Tile B型骨盆骨折療效分析. 中國修復重建外科雜志, 2024, 38(8): 954-960. doi: 10.7507/1002-1892.202404049 復制
版權信息: ?四川大學華西醫院華西期刊社《中國修復重建外科雜志》版權所有,未經授權不得轉載、改編
近年來,高處墜落、重物打擊、交通事故等高能量損傷導致的骨盆骨折發生率有增加趨勢,約占全身骨折的3%,患者常合并其他部位損傷,病死率和并發癥發生率均較高[1-2]。Tile B型骨盆骨折以旋轉不穩定為特征,當恥骨聯合分離過大或恥骨骨折移位過大時,手術為首選治療方法。但是骨盆解剖結構復雜,盆腔容納內臟及重要血管、神經,導致骨盆骨折病情復雜,常合并多部位損傷。如何在達到骨折精準復位和固定同時,盡可能降低手術操作難度、減少醫源性損傷概率,是目前骨盆骨折治療研究熱點。切開復位內固定術優點在于術野開闊,但創傷大、出血多、并發癥較多[3],因此微創手術逐漸成為臨床首選術式。
閉合復位是骨盆骨折微創手術的基礎,但要精準閉合復位難度較大,為此學者們進行了一系列研究,并提出了多種輔助復位設備,例如Matta等[4]設計的骨盆固定架、Lefaivre等[5]研制的Starr骨盆復位架以及中國人民解放軍總醫院骨科團隊研制的骨盆外架復位系統[6-7]等,各有優缺點。近年,骨盆骨折復位機器人系統的出現實現了智能化、精準化、便捷化地安全閉合復位骨折[8-9]。此外,骨盆骨折微創術式中,經皮螺釘內固定是常用固定方式[10]。但徒手植釘難度、風險較大,準確性主要依賴術者臨床經驗,稍有不慎即可能損傷盆腔內組織;且植釘期間需多次透視明確位置,放射暴露較多也不容忽視。為避免上述問題,導航機器人應運而生。導航機器人是國內骨科領域應用較早的手術機器人,既往研究對其輔助骨盆骨折固定的植釘精準性、安全性均進行了驗證,術中X線透視次數也較少[11-12]。2022年1月—2023年2月,佛山市中醫院在10例Tile B型骨盆骨折患者手術中采用復位機器人聯合導航機器人進行輔助,提高了骨折復位及固定的準確性、安全性。報告如下。
1 臨床資料
1.1 患者選擇標準
納入標準:① 年齡18~80歲;② 需復位的閉合性Tile B型骨盆骨折;③ 骨折后2周內手術。排除標準:① 雙側骨盆骨折明顯移位,無法使用骨科手術機器人完成手術規劃;② 生命體征不平穩,經評估無法耐受麻醉或手術;③ 局部皮膚狀況不佳或內植物預期插入部位或周圍軟組織感染;④ 合并系統性疾病,如嚴重出血性疾病、心臟病、呼吸系統疾病等;⑤ 病理性骨折(例如原發性或轉移性腫瘤)或翻修手術(比如畸形愈合、骨不連或感染);⑥ 存在麻醉和手術禁忌證;⑦ 接受化療或放療、全身應用皮質類固醇激素或生長因子治療。
2022年1月—2023年2月共10例患者符合選擇標準,采用復位機器人聯合導航機器人輔助微創治療,手術均由同一醫師團隊完成。
1.2 一般資料
本組男6例,女4例;年齡30~71歲,平均45.5歲。身體質量指數19.9~25.5 kg/m2,平均22.8 kg/m2。致傷原因:交通事故傷5例,重物壓傷3例,高處墜落傷2例。受傷至手術時間4~13 d,平均6.8 d。骨折Tile分型:B1型2例,B2型1例,B3型7例。合并傷:失血性休克1例,四肢骨折6例,肋骨骨折5例,胸腰椎骨折4例,肺挫傷3例,膀胱損傷2例,下肢神經損傷3例,膝關節交叉韌帶及半月板損傷1例。
1.3 手術方法
入院后患者均行血流動力學評估,其中1例血流動力學不穩定,給予液體復蘇等處理。待患者生命體征平穩后行骨盆骨折復位內固定手術。本組采用骨盆骨折智能化復位機器人(北京羅森博特科技有限公司)輔助骨折復位,天璣導航機器人(北京天智航醫療科技股份有限公司)輔助固定。
全身麻醉下,患者取仰臥位,常規骨盆部手術消毒、鋪巾、貼膜;在健側骨盆床旁放置被動機械臂把持裝置,將光學追蹤系統放置在合適位置。① 安裝導航機器人示蹤器及掃描患者骨盆圖像。導航機器人示蹤器安裝于健側骨盆髂前上棘處,連接導航機器人及三維C臂(西門子公司,德國),掃描骨盆部獲得錐束CT數據,將數據上傳至導航機器人系統。
② 骶髂關節螺釘導針規劃與植入。在導航機器人系統中模擬定位后環骶髂關節螺釘植入路徑及位置,操作導航機器人機械臂至預定導針植入處皮膚附近,維持入釘路徑,術者在預定導針植入處作一長約1 cm切口,鈍性分離皮下組織,切開筋膜,依規劃鉆入克氏針作為導針,透視檢查導針位置,防止骶髂關節螺釘穿出規劃通道而進入骶管、骶神經孔,檢查滿意后留置。
③ 患側骨盆復位。先將導航機器人裝置移開,拆除示蹤器并在雙側髂前上棘處安裝復位機器人示蹤器,三維C臂分別掃描左、右側骨盆,將數據上傳至復位機器人系統。床尾安裝彈性牽引裝置對患側骨盆進行股骨髁上牽引,完成速度設置、閾值設置、目標牽引力設置。在系統實時監控下,于健側骨盆LC-2螺釘通道位置及臀肌粗隆位置(髂骨翼最寬處)用專用手鉆植入半螺紋針作為把持針,透視檢查把持針位置滿意后連接被動機械臂,即可固定健側骨盆。于患側骨盆LC-2螺釘通道位置及臀肌粗隆位置同法植入半螺紋針作為把持針,透視檢查把持針位置滿意后連接主動機械臂。在復位機器人系統軟件中以骨盆對稱復位技術完成患側骨盆復位路徑規劃及機械臂運轉復位,復位完成后主動機械臂將自動鎖定以維持復位,透視檢查骨折復位滿意后,用連接桿連接雙側臀肌粗隆處半螺紋針作臨時固定,拔除其他半螺紋針。
④ 經皮螺釘植入。將經皮骶髂關節螺釘沿先前預置的導針方向擰入。拆除復位機器人雙側示蹤器,將導航機器人示蹤器重新安裝于原位,透視后將數據上傳至導航機器人系統,描畫模擬定位前環經皮螺釘植入路徑,操作機械臂移動至預定位置,維持入釘路徑;在機械臂末端定位導向器指引下,術者用骨科電鉆將克氏針鉆入作為導針,透視檢查導針,防止其鉆出預定通道進入髂部血管、神經、精索等組織分布區域,明確位置滿意后擰入經皮螺釘并再次透視確認。本組共植入恥骨支螺釘11枚、恥骨聯合螺釘8枚、骶髂關節螺釘21枚(S1螺釘11枚,S2螺釘10枚)。拔除導針后,對4例骨折移位較大的患者,再利用原雙側髂前下棘的LC-2螺釘通道植入內置外固定架(internal fixator,INFIX)。常規生理鹽水沖洗、縫合、包扎。手術操作步驟見圖1~3。
 圖1
復位機器人運行示意圖
Figure1.
Schematic diagram of the reduction robot operation
圖1
復位機器人運行示意圖
Figure1.
Schematic diagram of the reduction robot operation
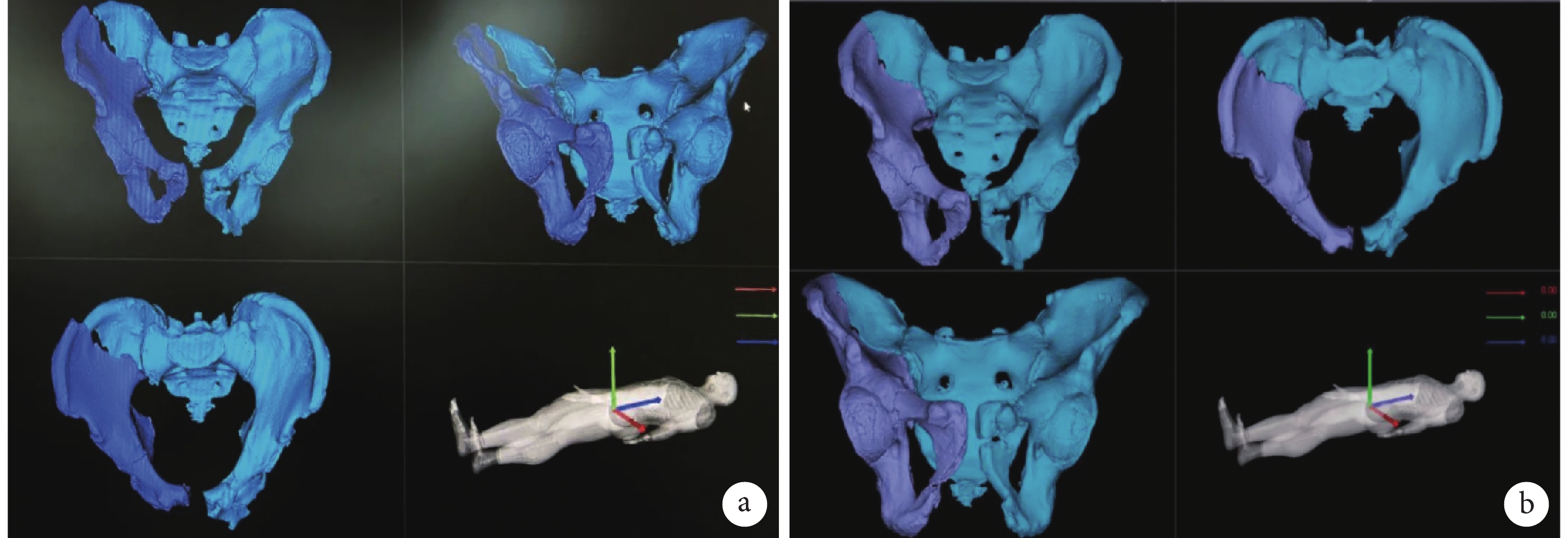
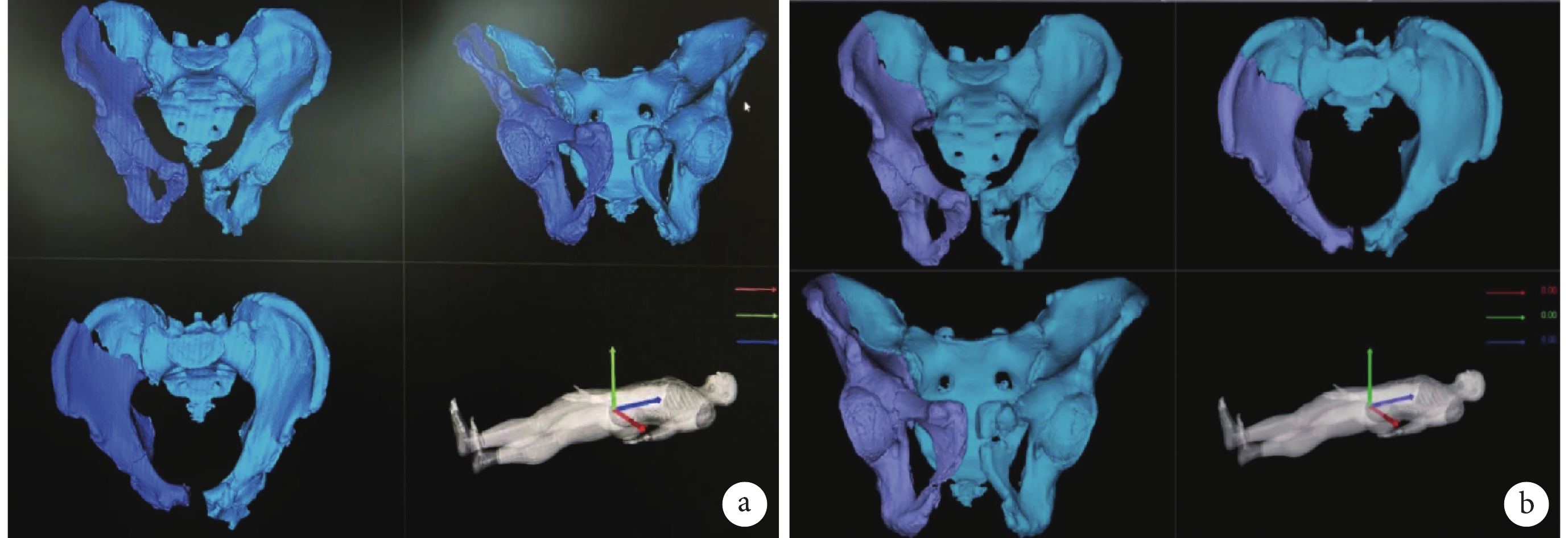 圖2
復位機器人規劃骨折復位
圖2
復位機器人規劃骨折復位
a. 規劃前; b.規劃后
Figure2. Diagram of fracture reduction assisted by reduction robota. Before planning; b. After planning
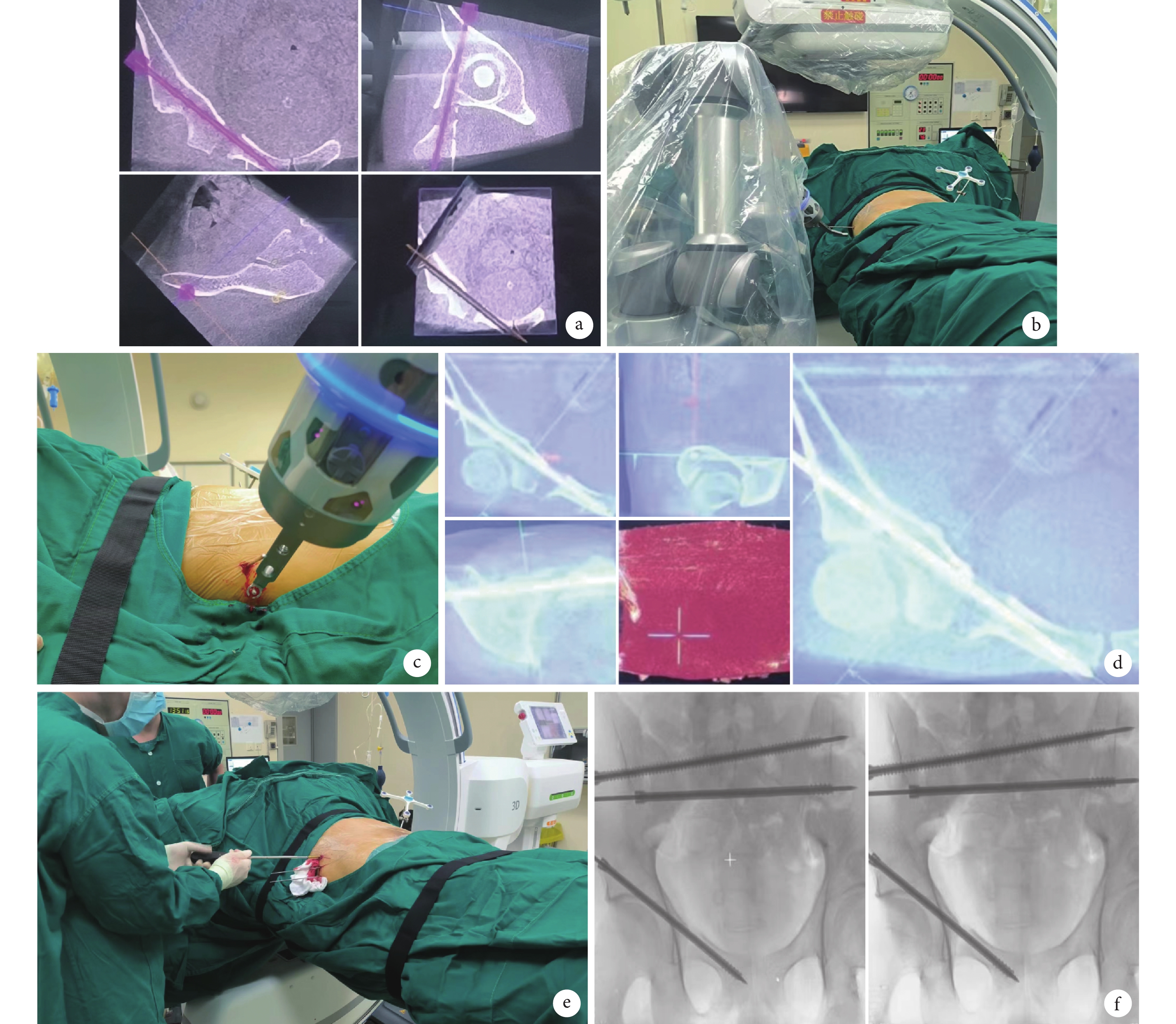
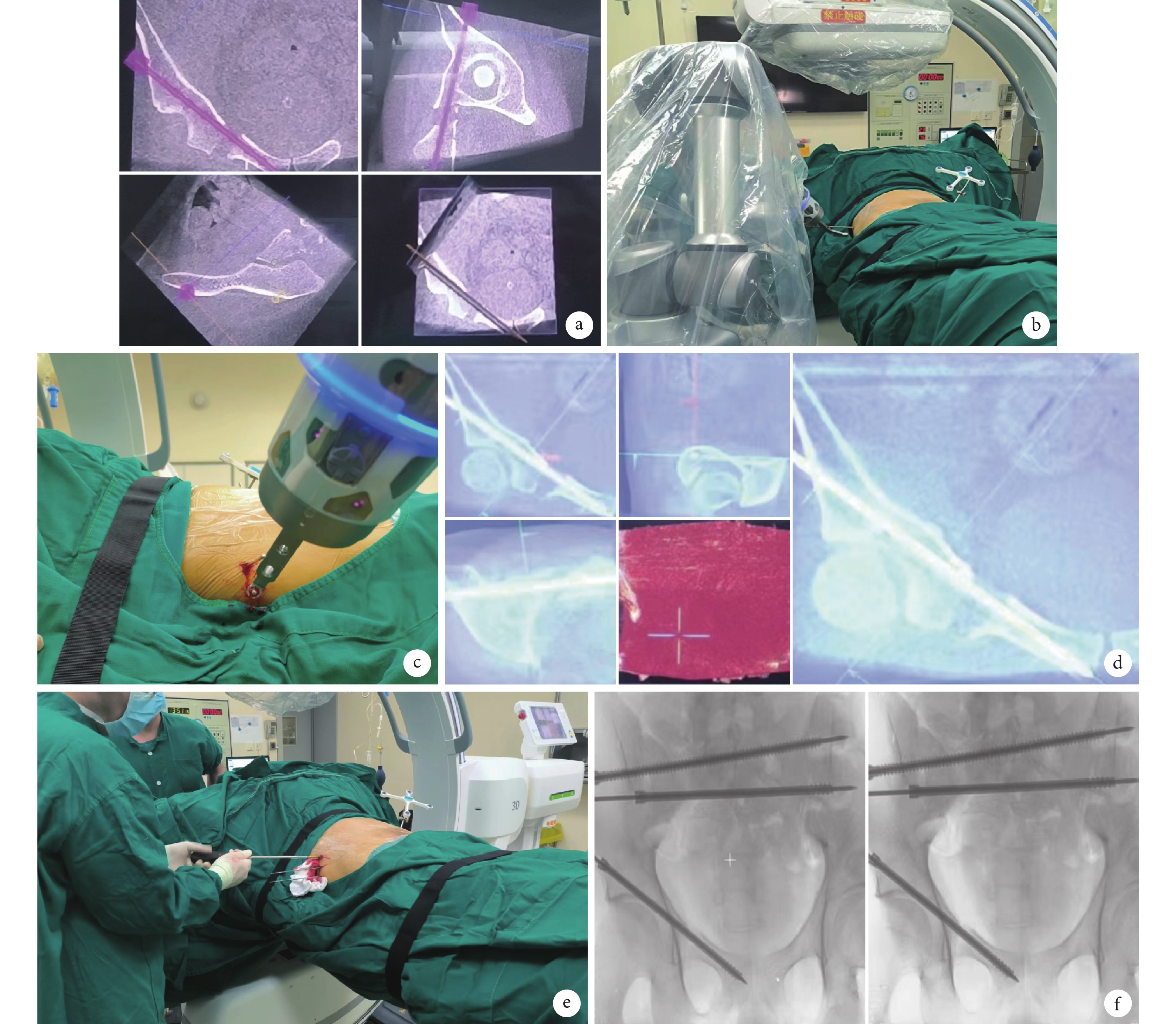 圖3
導航機器人輔助固定示意圖
圖3
導航機器人輔助固定示意圖
a. 植釘規劃; b. 機械臂自動移動至預定植釘點附近; c. 機械臂輔助定位; d. 機械臂引導下鉆入克氏針(導針)后透視檢查; e. 術者沿導針植入經皮螺釘; f. 螺釘植入后透視檢查
Figure3. Schematic diagram of navigation robot-assisted fixationa. Percutaneous screw placement planning; b. The navigation robot arm automatically moved to the point that the percutaneous screw was scheduled to be placed; c. Robotic arm-assisted positioning; d. Fluoroscopy examination after inserting the Kirschner wire (guide wire) under the guidance of the robot arm; e. The percutaneous screw was inserted along the guide wire; f. Fluoroscopy examination after inserting the percutaneous screw
1.4 術后處理
術后給予預防感染及下肢深靜脈血栓形成處理;對于合并的四肢骨折及韌帶、半月板損傷行擇期手術。術后囑患者盡早開始功能鍛煉,出院后門診隨訪,并指導患者功能鍛煉。
1.5 療效評價指標
1.5.1 骨折復位相關指標
① 復位時間:復位機器人從規劃復位至骨盆復位達滿意解剖位置并維持的時間。② 復位質量:基于術中復位后骨盆X線片測量的骨折斷端最大移位,按照Matta評分標準[13]評價骨折復位質量,其中骨折斷端最大移位≤4 mm為優,4~10 mm為良,11~20 mm為可,>20 mm為差。
1.5.2 臨床療效評價指標
① 手術時間:患者體位擺放至切口包扎完成時間;② 術中透視次數及時間:術中三維C臂透視、掃描檢查次數及總時間;③ 術中出血量:術中復位和固定過程中出血量;④ 并發癥發生情況:包括術中重要神經血管損傷、術后切口感染及異位骨化形成等;⑤ 骨盆X線片復查骨折愈合情況和螺釘位置;⑥ 髖關節功能評價(Majeed評分[14]),總分100分,其中優85~100分,良70~84分,中55~69分,差<55分。
2 結果
2.1 骨折復位效果評價
10例患者骨盆骨折復位時間42~62 min,平均52.3 min。復位后骨折斷端最大移位為2.16~12.50 mm,平均5.85 mm;復位質量根據Matta評分標準,獲優4例、良5例、可1例,優良率為90%。
2.2 臨床療效評價
本組手術時間180~235 min,平均215.5 min;術中透視18~66次,平均31.8次;術中透視時間16~59 s,平均28.6 s;術中出血量50~200 mL,平均110.0 mL;術中均無重要血管、神經損傷及切口感染發生。
術后患者均獲隨訪,隨訪時間13~18個月,平均16個月。 X線片復查示骨折均愈合,愈合時間11~14周,平均12.3周;隨訪期間1例發生左側髖關節周圍異位骨化,但未作特殊處理。末次隨訪時,髖關節功能Majeed評分達70~92分,平均72.7分;獲優2例、良8例,優良率100%。見圖4。
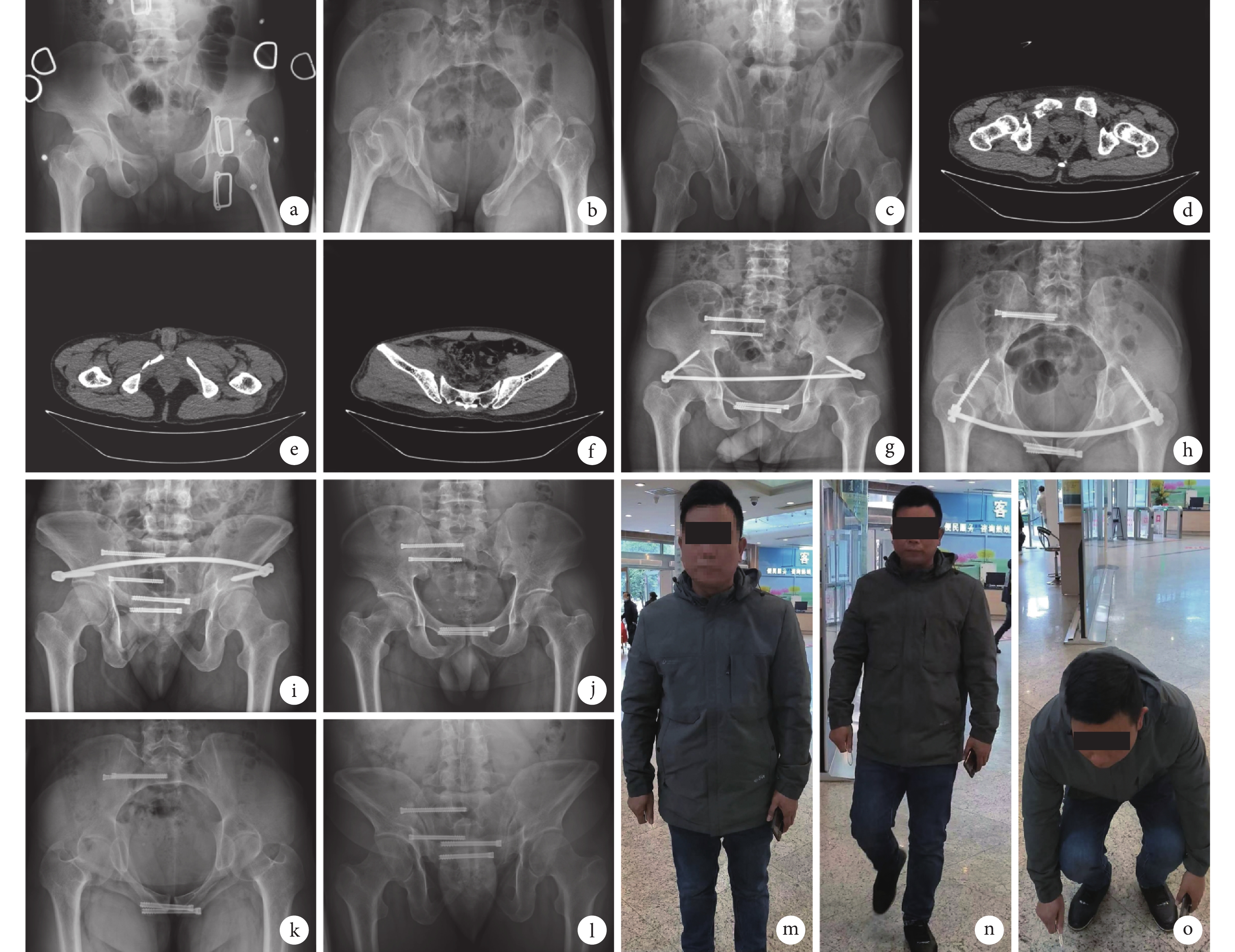
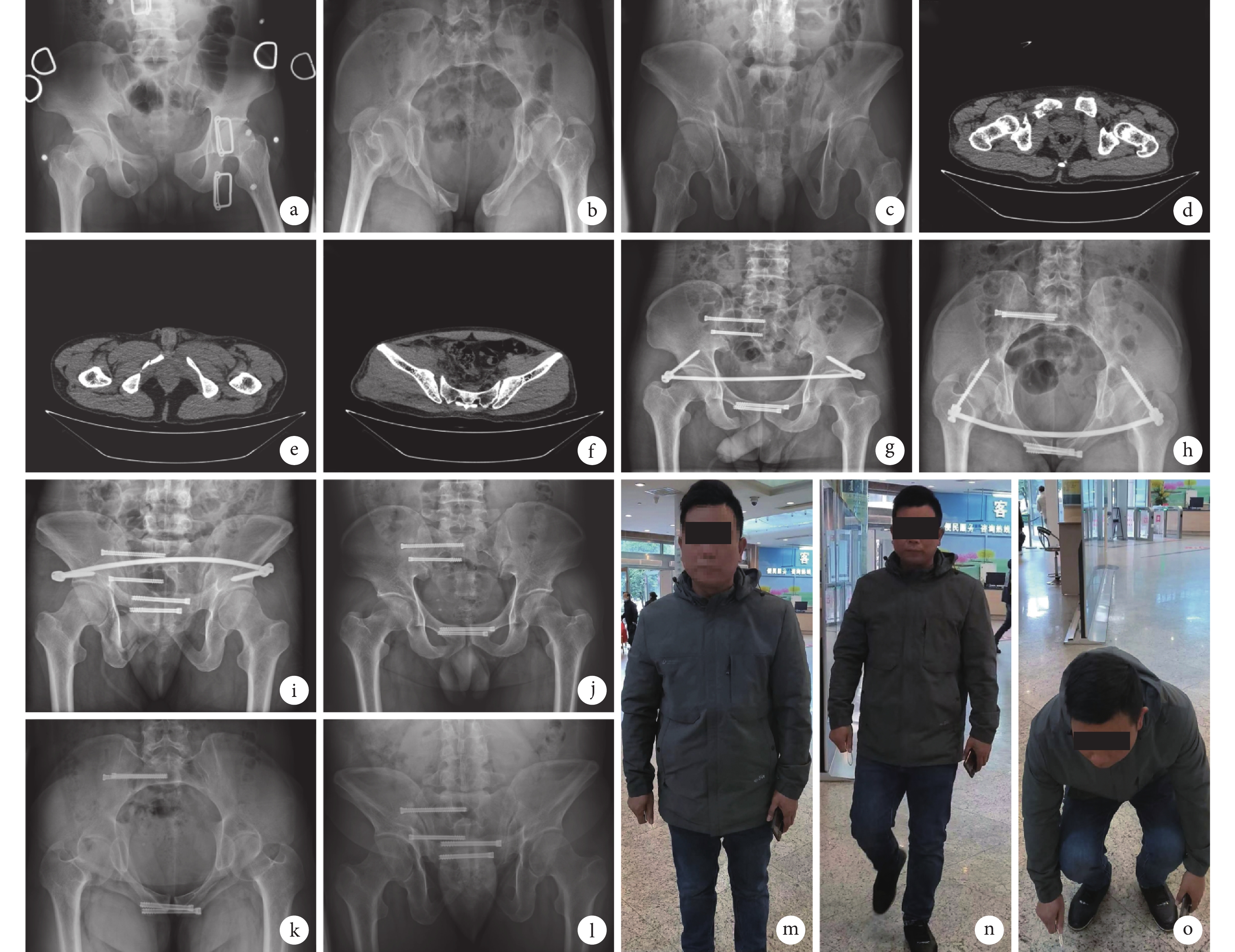 圖4
患者,男,47歲,Tile B1型骨盆骨折
圖4
患者,男,47歲,Tile B1型骨盆骨折
a~f. 術前骨盆前后位、入口位、出口位X線片及CT; g~i. 術后1 d骨盆前后位、入口位、出口位X線片; j~l. 術后14個月骨盆前后位、入口位、出口位X線片; m~o. 術后14個月患者關節功能
Figure4. A 47-year-old male patient with Tile type B1 pelvic fracturea-f. Anteroposterior, inlet, and outlet X-ray films of the pelvis and CT before operation; g-i. Anteroposterior, inlet, and outlet X-ray films of the pelvis at 1 day after operation; j-l. Anteroposterior, inlet, and outlet X-ray films of the pelvis at 14 months after operation; m-o. Joint function at 14 months after operation
3 討論
3.1 復位機器人閉合復位骨盆骨折優缺點
復位機器人系統以骨盆對稱復位技術[15]完成規劃和復位,并對復位后位置加以維持,與既往報道的骨盆解鎖復位裝置[6]相比,本組平均骨折復位時間與Matta評分優良率均相近,但平均透視次數明顯降低(32次 vs 132次)。術中采用的彈性牽引可輔助復位,實現靈活動態牽引,減少坐骨神經損傷概率[16]。本研究中使用此設備行閉合復位后,復位質量Matta評分均達可及以上,也未發生內臟、重要血管和神經受損等醫源性損傷,具有智能、便捷、安全、精準復位的優點。
本組3例患者復位質量Matta評分為優,但是末次隨訪時Majeed評分僅為70余分,分析主要有以下原因:① 患者為多處損傷,其他部位損傷未正常愈合,影響功能,如1例患者左脛、腓骨骨折行擇期手術固定,末次隨訪時兩處骨折仍未正常愈合,導致行、站、工作等受影響;② 均為高能量損傷,除骨性結構外,往往韌帶等軟組織也受損,患者骨盆部疼痛與軟組織(如骶髂前韌帶)損傷未獲得及時、正確治療有關;③ 部分患者行INFIX固定,對性生活有一定影響。
復位機器人系統存在一定局限性。首先,當兩側骨盆均存在嚴重移位時,該系統便難以實現準確復位,此時需先手術固定一側骨盆,再行機器人復位。其次,機械臂最大負荷為160 N,然而部分骨盆骨折最大復位負荷超過200 N,此時需醫生輔助機械臂完成操作[9]。
3.2 導航機器人輔助固定骨盆骨折優缺點
與傳統透視下植入經皮螺釘相比[17],本組應用天璣導航機器人輔助植釘后Majeed評分優良率較高(79.2% vs 100%)、并發癥發生率較低(16.7% vs 10%);透視時間也明顯縮短,傳統植入單枚螺釘平均透視時間為126 s [18],而本組手術全程透視時間平均28.6 s,可見機器人輔助可明顯減少透視時間,降低術者和患者射線暴露風險。
INFIX技術結合了外固定架和鋼板螺釘內固定的長處,尤其適用于肥胖患者,為骨盆骨折提供了穩定內固定,功能效果良好,避免了外固定或鋼板切開復位的缺點[19],現已被廣泛用于治療骨盆骨折[20-22]。但該技術也存在發生股外側皮神經損傷、股神經損傷、異位骨化等并發癥風險[23]。本組1例患者術后發生左側髖關節周圍異位骨化,分析為INFIX固定后并發癥,但患者未訴不適且未影響功能活動,遂未行特殊處理。
本研究中,在導航機器人輔助下,術者在機械臂引導下進行的植釘位置均在規劃預期內,入釘方向和位置均由電腦計算得出,操作流程較徒手植釘簡化,未出現植釘導致的內臟、重要神經和血管損傷,術中放射暴露次數和時間均較少。在操作過程中需注意避免觸碰示蹤器,術中導航圖像獲取及配準等過程增加了手術時間是其不足。
3.3 機器人輔助骨盆骨折手術注意事項
術中常規攝取骨盆前后位、入口位、出口位X線片,因此術前在制定手術方案時需要注意:① 做好灌腸等腸道準備,避免術中攝片效果受腸道內容物及腸內氣體的影響。② 在X線片或CT上量取患者骶骨傾斜角度,以期在手術時盡可能快地調整C臂投射角度。否則,為獲取高質量影像,往往需增加X線透視次數,不僅增加了人員放射暴露,也導致手術總體時間延長。
按照機器人規劃路徑鉆入導針時存在打滑情況,其原因及對策如下:① 機器人本身存在一定誤差,需改進設備;② 術者水平不足,需加強培訓;③ 骨盆本身解剖特點導致,規劃時可有意將路徑規劃至易打滑方向的相反方向或鉆入導針時先令其在骨面原位轉動,待穩定后再向前鉆入。
綜上述,機器人輔助復位及固定Tile B型骨盆骨折,復位和固定的精準性和安全性可靠,流程便捷,術中出血量和人員放射暴露較少,患者術后功能恢復良好,但術前需做好兩側骨盆移位程度和解剖特點評估以及腸道準備等工作。
本研究不足在于:① 屬于回顧性研究,缺少與其他治療方法的對照;② 病例數較少;③ 只關注Tile B型骨盆骨折;④ 研究對象身體質量指數最大者為25.5 kg/m2,而如今超重、肥胖人群增多,此類患者的手術質量有待研究。
利益沖突 在課題研究和文章撰寫過程中不存在利益沖突;經費支持沒有影響文章觀點和對研究數據客觀結果的分析及其報道
倫理聲明 研究方案經佛山市中醫院醫學倫理委員會批準(QX[2022]001)
作者貢獻聲明 廖江波、代永鴻:研究設計與實施、文章撰寫、數據處理、患者隨訪;吳征杰:研究及手術技術指導、數據處理、文章審閱、經費支持;曾焰輝、李燦輝:研究及手術技術指導、文章審閱;王學霖:數據處理、文章審閱;王軍強、趙春鵬、吳新寶:技術指導
近年來,高處墜落、重物打擊、交通事故等高能量損傷導致的骨盆骨折發生率有增加趨勢,約占全身骨折的3%,患者常合并其他部位損傷,病死率和并發癥發生率均較高[1-2]。Tile B型骨盆骨折以旋轉不穩定為特征,當恥骨聯合分離過大或恥骨骨折移位過大時,手術為首選治療方法。但是骨盆解剖結構復雜,盆腔容納內臟及重要血管、神經,導致骨盆骨折病情復雜,常合并多部位損傷。如何在達到骨折精準復位和固定同時,盡可能降低手術操作難度、減少醫源性損傷概率,是目前骨盆骨折治療研究熱點。切開復位內固定術優點在于術野開闊,但創傷大、出血多、并發癥較多[3],因此微創手術逐漸成為臨床首選術式。
閉合復位是骨盆骨折微創手術的基礎,但要精準閉合復位難度較大,為此學者們進行了一系列研究,并提出了多種輔助復位設備,例如Matta等[4]設計的骨盆固定架、Lefaivre等[5]研制的Starr骨盆復位架以及中國人民解放軍總醫院骨科團隊研制的骨盆外架復位系統[6-7]等,各有優缺點。近年,骨盆骨折復位機器人系統的出現實現了智能化、精準化、便捷化地安全閉合復位骨折[8-9]。此外,骨盆骨折微創術式中,經皮螺釘內固定是常用固定方式[10]。但徒手植釘難度、風險較大,準確性主要依賴術者臨床經驗,稍有不慎即可能損傷盆腔內組織;且植釘期間需多次透視明確位置,放射暴露較多也不容忽視。為避免上述問題,導航機器人應運而生。導航機器人是國內骨科領域應用較早的手術機器人,既往研究對其輔助骨盆骨折固定的植釘精準性、安全性均進行了驗證,術中X線透視次數也較少[11-12]。2022年1月—2023年2月,佛山市中醫院在10例Tile B型骨盆骨折患者手術中采用復位機器人聯合導航機器人進行輔助,提高了骨折復位及固定的準確性、安全性。報告如下。
1 臨床資料
1.1 患者選擇標準
納入標準:① 年齡18~80歲;② 需復位的閉合性Tile B型骨盆骨折;③ 骨折后2周內手術。排除標準:① 雙側骨盆骨折明顯移位,無法使用骨科手術機器人完成手術規劃;② 生命體征不平穩,經評估無法耐受麻醉或手術;③ 局部皮膚狀況不佳或內植物預期插入部位或周圍軟組織感染;④ 合并系統性疾病,如嚴重出血性疾病、心臟病、呼吸系統疾病等;⑤ 病理性骨折(例如原發性或轉移性腫瘤)或翻修手術(比如畸形愈合、骨不連或感染);⑥ 存在麻醉和手術禁忌證;⑦ 接受化療或放療、全身應用皮質類固醇激素或生長因子治療。
2022年1月—2023年2月共10例患者符合選擇標準,采用復位機器人聯合導航機器人輔助微創治療,手術均由同一醫師團隊完成。
1.2 一般資料
本組男6例,女4例;年齡30~71歲,平均45.5歲。身體質量指數19.9~25.5 kg/m2,平均22.8 kg/m2。致傷原因:交通事故傷5例,重物壓傷3例,高處墜落傷2例。受傷至手術時間4~13 d,平均6.8 d。骨折Tile分型:B1型2例,B2型1例,B3型7例。合并傷:失血性休克1例,四肢骨折6例,肋骨骨折5例,胸腰椎骨折4例,肺挫傷3例,膀胱損傷2例,下肢神經損傷3例,膝關節交叉韌帶及半月板損傷1例。
1.3 手術方法
入院后患者均行血流動力學評估,其中1例血流動力學不穩定,給予液體復蘇等處理。待患者生命體征平穩后行骨盆骨折復位內固定手術。本組采用骨盆骨折智能化復位機器人(北京羅森博特科技有限公司)輔助骨折復位,天璣導航機器人(北京天智航醫療科技股份有限公司)輔助固定。
全身麻醉下,患者取仰臥位,常規骨盆部手術消毒、鋪巾、貼膜;在健側骨盆床旁放置被動機械臂把持裝置,將光學追蹤系統放置在合適位置。① 安裝導航機器人示蹤器及掃描患者骨盆圖像。導航機器人示蹤器安裝于健側骨盆髂前上棘處,連接導航機器人及三維C臂(西門子公司,德國),掃描骨盆部獲得錐束CT數據,將數據上傳至導航機器人系統。
② 骶髂關節螺釘導針規劃與植入。在導航機器人系統中模擬定位后環骶髂關節螺釘植入路徑及位置,操作導航機器人機械臂至預定導針植入處皮膚附近,維持入釘路徑,術者在預定導針植入處作一長約1 cm切口,鈍性分離皮下組織,切開筋膜,依規劃鉆入克氏針作為導針,透視檢查導針位置,防止骶髂關節螺釘穿出規劃通道而進入骶管、骶神經孔,檢查滿意后留置。
③ 患側骨盆復位。先將導航機器人裝置移開,拆除示蹤器并在雙側髂前上棘處安裝復位機器人示蹤器,三維C臂分別掃描左、右側骨盆,將數據上傳至復位機器人系統。床尾安裝彈性牽引裝置對患側骨盆進行股骨髁上牽引,完成速度設置、閾值設置、目標牽引力設置。在系統實時監控下,于健側骨盆LC-2螺釘通道位置及臀肌粗隆位置(髂骨翼最寬處)用專用手鉆植入半螺紋針作為把持針,透視檢查把持針位置滿意后連接被動機械臂,即可固定健側骨盆。于患側骨盆LC-2螺釘通道位置及臀肌粗隆位置同法植入半螺紋針作為把持針,透視檢查把持針位置滿意后連接主動機械臂。在復位機器人系統軟件中以骨盆對稱復位技術完成患側骨盆復位路徑規劃及機械臂運轉復位,復位完成后主動機械臂將自動鎖定以維持復位,透視檢查骨折復位滿意后,用連接桿連接雙側臀肌粗隆處半螺紋針作臨時固定,拔除其他半螺紋針。
④ 經皮螺釘植入。將經皮骶髂關節螺釘沿先前預置的導針方向擰入。拆除復位機器人雙側示蹤器,將導航機器人示蹤器重新安裝于原位,透視后將數據上傳至導航機器人系統,描畫模擬定位前環經皮螺釘植入路徑,操作機械臂移動至預定位置,維持入釘路徑;在機械臂末端定位導向器指引下,術者用骨科電鉆將克氏針鉆入作為導針,透視檢查導針,防止其鉆出預定通道進入髂部血管、神經、精索等組織分布區域,明確位置滿意后擰入經皮螺釘并再次透視確認。本組共植入恥骨支螺釘11枚、恥骨聯合螺釘8枚、骶髂關節螺釘21枚(S1螺釘11枚,S2螺釘10枚)。拔除導針后,對4例骨折移位較大的患者,再利用原雙側髂前下棘的LC-2螺釘通道植入內置外固定架(internal fixator,INFIX)。常規生理鹽水沖洗、縫合、包扎。手術操作步驟見圖1~3。
圖1
復位機器人運行示意圖
Figure1.
Schematic diagram of the reduction robot operation
圖2
復位機器人規劃骨折復位
a. 規劃前; b.規劃后
Figure2. Diagram of fracture reduction assisted by reduction robota. Before planning; b. After planning
圖3
導航機器人輔助固定示意圖
a. 植釘規劃; b. 機械臂自動移動至預定植釘點附近; c. 機械臂輔助定位; d. 機械臂引導下鉆入克氏針(導針)后透視檢查; e. 術者沿導針植入經皮螺釘; f. 螺釘植入后透視檢查
Figure3. Schematic diagram of navigation robot-assisted fixationa. Percutaneous screw placement planning; b. The navigation robot arm automatically moved to the point that the percutaneous screw was scheduled to be placed; c. Robotic arm-assisted positioning; d. Fluoroscopy examination after inserting the Kirschner wire (guide wire) under the guidance of the robot arm; e. The percutaneous screw was inserted along the guide wire; f. Fluoroscopy examination after inserting the percutaneous screw
1.4 術后處理
術后給予預防感染及下肢深靜脈血栓形成處理;對于合并的四肢骨折及韌帶、半月板損傷行擇期手術。術后囑患者盡早開始功能鍛煉,出院后門診隨訪,并指導患者功能鍛煉。
1.5 療效評價指標
1.5.1 骨折復位相關指標
① 復位時間:復位機器人從規劃復位至骨盆復位達滿意解剖位置并維持的時間。② 復位質量:基于術中復位后骨盆X線片測量的骨折斷端最大移位,按照Matta評分標準[13]評價骨折復位質量,其中骨折斷端最大移位≤4 mm為優,4~10 mm為良,11~20 mm為可,>20 mm為差。
1.5.2 臨床療效評價指標
① 手術時間:患者體位擺放至切口包扎完成時間;② 術中透視次數及時間:術中三維C臂透視、掃描檢查次數及總時間;③ 術中出血量:術中復位和固定過程中出血量;④ 并發癥發生情況:包括術中重要神經血管損傷、術后切口感染及異位骨化形成等;⑤ 骨盆X線片復查骨折愈合情況和螺釘位置;⑥ 髖關節功能評價(Majeed評分[14]),總分100分,其中優85~100分,良70~84分,中55~69分,差<55分。
2 結果
2.1 骨折復位效果評價
10例患者骨盆骨折復位時間42~62 min,平均52.3 min。復位后骨折斷端最大移位為2.16~12.50 mm,平均5.85 mm;復位質量根據Matta評分標準,獲優4例、良5例、可1例,優良率為90%。
2.2 臨床療效評價
本組手術時間180~235 min,平均215.5 min;術中透視18~66次,平均31.8次;術中透視時間16~59 s,平均28.6 s;術中出血量50~200 mL,平均110.0 mL;術中均無重要血管、神經損傷及切口感染發生。
術后患者均獲隨訪,隨訪時間13~18個月,平均16個月。 X線片復查示骨折均愈合,愈合時間11~14周,平均12.3周;隨訪期間1例發生左側髖關節周圍異位骨化,但未作特殊處理。末次隨訪時,髖關節功能Majeed評分達70~92分,平均72.7分;獲優2例、良8例,優良率100%。見圖4。
圖4
患者,男,47歲,Tile B1型骨盆骨折
a~f. 術前骨盆前后位、入口位、出口位X線片及CT; g~i. 術后1 d骨盆前后位、入口位、出口位X線片; j~l. 術后14個月骨盆前后位、入口位、出口位X線片; m~o. 術后14個月患者關節功能
Figure4. A 47-year-old male patient with Tile type B1 pelvic fracturea-f. Anteroposterior, inlet, and outlet X-ray films of the pelvis and CT before operation; g-i. Anteroposterior, inlet, and outlet X-ray films of the pelvis at 1 day after operation; j-l. Anteroposterior, inlet, and outlet X-ray films of the pelvis at 14 months after operation; m-o. Joint function at 14 months after operation
3 討論
3.1 復位機器人閉合復位骨盆骨折優缺點
復位機器人系統以骨盆對稱復位技術[15]完成規劃和復位,并對復位后位置加以維持,與既往報道的骨盆解鎖復位裝置[6]相比,本組平均骨折復位時間與Matta評分優良率均相近,但平均透視次數明顯降低(32次 vs 132次)。術中采用的彈性牽引可輔助復位,實現靈活動態牽引,減少坐骨神經損傷概率[16]。本研究中使用此設備行閉合復位后,復位質量Matta評分均達可及以上,也未發生內臟、重要血管和神經受損等醫源性損傷,具有智能、便捷、安全、精準復位的優點。
本組3例患者復位質量Matta評分為優,但是末次隨訪時Majeed評分僅為70余分,分析主要有以下原因:① 患者為多處損傷,其他部位損傷未正常愈合,影響功能,如1例患者左脛、腓骨骨折行擇期手術固定,末次隨訪時兩處骨折仍未正常愈合,導致行、站、工作等受影響;② 均為高能量損傷,除骨性結構外,往往韌帶等軟組織也受損,患者骨盆部疼痛與軟組織(如骶髂前韌帶)損傷未獲得及時、正確治療有關;③ 部分患者行INFIX固定,對性生活有一定影響。
復位機器人系統存在一定局限性。首先,當兩側骨盆均存在嚴重移位時,該系統便難以實現準確復位,此時需先手術固定一側骨盆,再行機器人復位。其次,機械臂最大負荷為160 N,然而部分骨盆骨折最大復位負荷超過200 N,此時需醫生輔助機械臂完成操作[9]。
3.2 導航機器人輔助固定骨盆骨折優缺點
與傳統透視下植入經皮螺釘相比[17],本組應用天璣導航機器人輔助植釘后Majeed評分優良率較高(79.2% vs 100%)、并發癥發生率較低(16.7% vs 10%);透視時間也明顯縮短,傳統植入單枚螺釘平均透視時間為126 s [18],而本組手術全程透視時間平均28.6 s,可見機器人輔助可明顯減少透視時間,降低術者和患者射線暴露風險。
INFIX技術結合了外固定架和鋼板螺釘內固定的長處,尤其適用于肥胖患者,為骨盆骨折提供了穩定內固定,功能效果良好,避免了外固定或鋼板切開復位的缺點[19],現已被廣泛用于治療骨盆骨折[20-22]。但該技術也存在發生股外側皮神經損傷、股神經損傷、異位骨化等并發癥風險[23]。本組1例患者術后發生左側髖關節周圍異位骨化,分析為INFIX固定后并發癥,但患者未訴不適且未影響功能活動,遂未行特殊處理。
本研究中,在導航機器人輔助下,術者在機械臂引導下進行的植釘位置均在規劃預期內,入釘方向和位置均由電腦計算得出,操作流程較徒手植釘簡化,未出現植釘導致的內臟、重要神經和血管損傷,術中放射暴露次數和時間均較少。在操作過程中需注意避免觸碰示蹤器,術中導航圖像獲取及配準等過程增加了手術時間是其不足。
3.3 機器人輔助骨盆骨折手術注意事項
術中常規攝取骨盆前后位、入口位、出口位X線片,因此術前在制定手術方案時需要注意:① 做好灌腸等腸道準備,避免術中攝片效果受腸道內容物及腸內氣體的影響。② 在X線片或CT上量取患者骶骨傾斜角度,以期在手術時盡可能快地調整C臂投射角度。否則,為獲取高質量影像,往往需增加X線透視次數,不僅增加了人員放射暴露,也導致手術總體時間延長。
按照機器人規劃路徑鉆入導針時存在打滑情況,其原因及對策如下:① 機器人本身存在一定誤差,需改進設備;② 術者水平不足,需加強培訓;③ 骨盆本身解剖特點導致,規劃時可有意將路徑規劃至易打滑方向的相反方向或鉆入導針時先令其在骨面原位轉動,待穩定后再向前鉆入。
綜上述,機器人輔助復位及固定Tile B型骨盆骨折,復位和固定的精準性和安全性可靠,流程便捷,術中出血量和人員放射暴露較少,患者術后功能恢復良好,但術前需做好兩側骨盆移位程度和解剖特點評估以及腸道準備等工作。
本研究不足在于:① 屬于回顧性研究,缺少與其他治療方法的對照;② 病例數較少;③ 只關注Tile B型骨盆骨折;④ 研究對象身體質量指數最大者為25.5 kg/m2,而如今超重、肥胖人群增多,此類患者的手術質量有待研究。
利益沖突 在課題研究和文章撰寫過程中不存在利益沖突;經費支持沒有影響文章觀點和對研究數據客觀結果的分析及其報道
倫理聲明 研究方案經佛山市中醫院醫學倫理委員會批準(QX[2022]001)
作者貢獻聲明 廖江波、代永鴻:研究設計與實施、文章撰寫、數據處理、患者隨訪;吳征杰:研究及手術技術指導、數據處理、文章審閱、經費支持;曾焰輝、李燦輝:研究及手術技術指導、文章審閱;王學霖:數據處理、文章審閱;王軍強、趙春鵬、吳新寶:技術指導