


脊柱手術機器人自第1代發展至今已有20年歷史,目前關鍵技術已日趨完善,出現了以器械內植物可視化導航、無導絲植釘為特征的第4代機型。機器人輔助脊柱手術(robot-assisted spine surgery,RSS)技術基礎原理包括手術計劃、追蹤、圖像注冊以及機械臂控制技術。目前,該技術已成熟應用于胸腰椎手術中,在頸椎手術、脊柱腫瘤手術以及經皮脊柱手術等脊柱外科領域尚處于初期階段,在精確定位、減少手術創傷,從而改善患者預后方面具有優勢。RSS技術前沿研究同時關注臨床成本效益分析以及機器人特異性并發癥。隨著人工智能技術實現與機器人手術計劃的結合,RSS技術將進一步整合其他新興技術,應用于更廣泛的臨床場景中。
引用本文: 黃逸, 王巖. 機器人輔助脊柱手術的歷史、前沿與未來趨勢. 中國修復重建外科雜志, 2024, 38(8): 904-910. doi: 10.7507/1002-1892.202404109 復制
版權信息: ?四川大學華西醫院華西期刊社《中國修復重建外科雜志》版權所有,未經授權不得轉載、改編
機器人輔助脊柱手術(robot-assisted spine surgery,RSS)是脊柱外科手術向微創化、精準化發展的技術進展。目前,隨著大量脊柱手術機器人(spinal robotics,SR)系統進入市場并投入使用,RSS技術逐漸在全球范圍內得到應用(圖1)。本文旨在探討RSS技術從誕生之初到如今廣泛應用的歷史沿革,以及關鍵技術原理、臨床應用現狀與其未來前景。
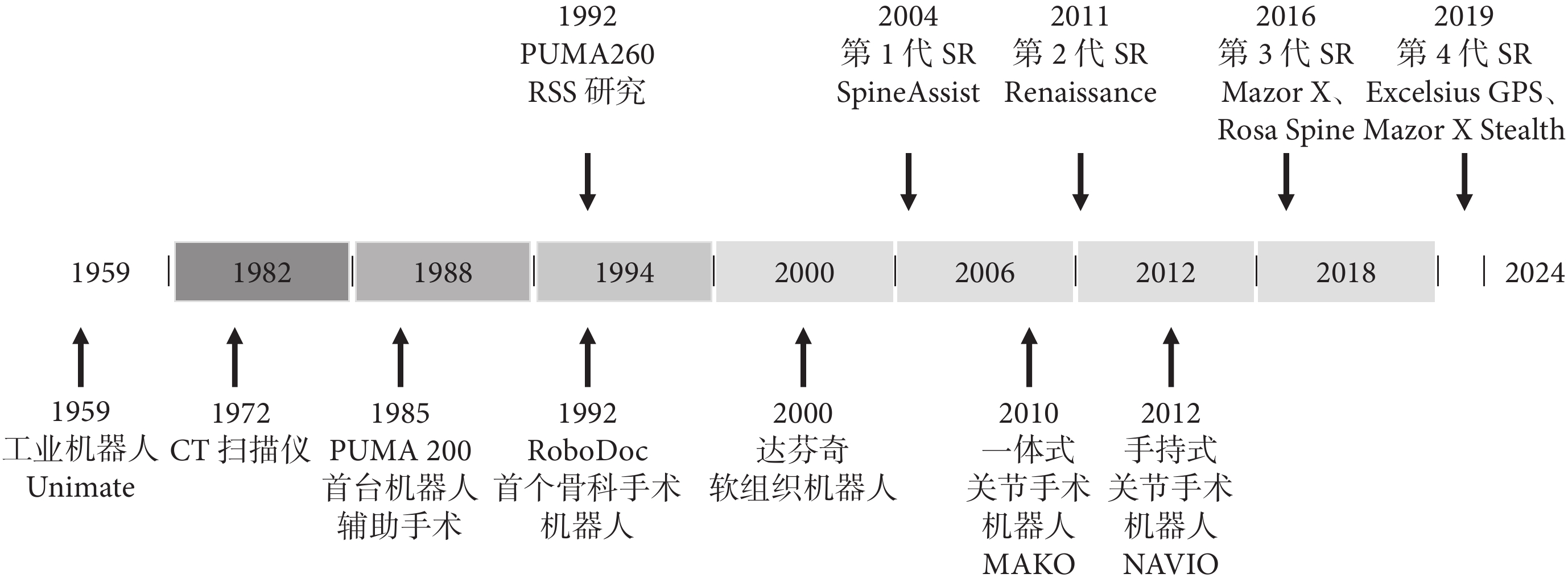 圖1
RSS技術發展時間軸
Figure1.
Development timeline of RSS technology
圖1
RSS技術發展時間軸
Figure1.
Development timeline of RSS technology
1 歷史沿革
根據國際機器人聯合會的定義,具有自動性、可編程性和交互性3個關鍵特征的設備可稱為“機器人”。手術機器人技術源自工業機器人,20世紀50年代末“機器人之父”恩格伯格發明了全球首臺工業機器人Unimate,并將其用于汽車工業生產,80年代機器人技術在醫療領域開始發展。1985年,由工業機器人改造的PUMA200問世,并完成了首臺機器人輔助手術,實現了神經外科手術中精準定位的目標[1]。
隨著機器人技術的進步與臨床治療需求的提高,手術機器人開始被獨立研發,從而區別于以往基于工業機器人的專科化改造。手術機器人按控制原理可分為遙控型機器人、共同控制型機器人及監督控制型機器人。2000年,用于軟組織手術的遙控型機器人達芬奇的出現標志著手術機器人技術的突破,達芬奇在術者直接控制下能完成復雜精細的手術任務,可在嚴格限制的手術空間內完成多自由度靈活操作。
目前,骨科領域廣泛應用的手術機器人類型為共同控制型機器人,即機械臂與術者同時控制手術器械,機器人導向、運行過程中有部分自主性。共同控制型機器人結合了機器人操作穩定、精準度高及減少術者操作疲勞的特點,以及人類在決策、判斷與應對突發情況的優勢,更適合骨科擇期手術這類對數值精度要求較高的應用場景。機器人在關節外科領域的應用早于脊柱外科領域,RoboDoc是美國THINK Surgical公司研發的關節置換機器人,1992年其完成了第1例機器人輔助全髖關節置換術。進入21世紀之后,關節外科機器人快速發展,出現了以美國Stryker公司MAKO、Smith & Nephew公司 CORI為代表的新一代關節置換手術機器人,其手術目標是通過追蹤技術與觸覺反饋技術對骨性結構實現高精度切削操作。
SR的研發亦開端于工業機器人的改造。1992年,Sautot等將PUMA 260連接激光發射器進行了仿真模型骨的椎弓根螺釘植入實驗[2-3]。早期機型針對多種脊柱手術操作,包括經椎弓根螺釘植入、椎體成形術、椎體活檢、椎板切除、神經阻滯、局部電刺激等。由于操作目標不同,受制于技術瓶頸或臨床可用性,學者們放棄了對遙控型機型、由機器人自主操作監督控制機型的進一步開發與應用,以經椎弓根螺釘植入為目標的共同控制機型成為主要研發對象,其一般手術應用流程包括影像規劃、注冊識別、機械臂執行(圖2),以完成椎弓根螺釘植入為手術目標構成了目前RSS技術的基石。從第1個成功廣泛應用于臨床的SR開始,發展至今已有20年,可根據其技術特征大致劃分為四代(表1)。
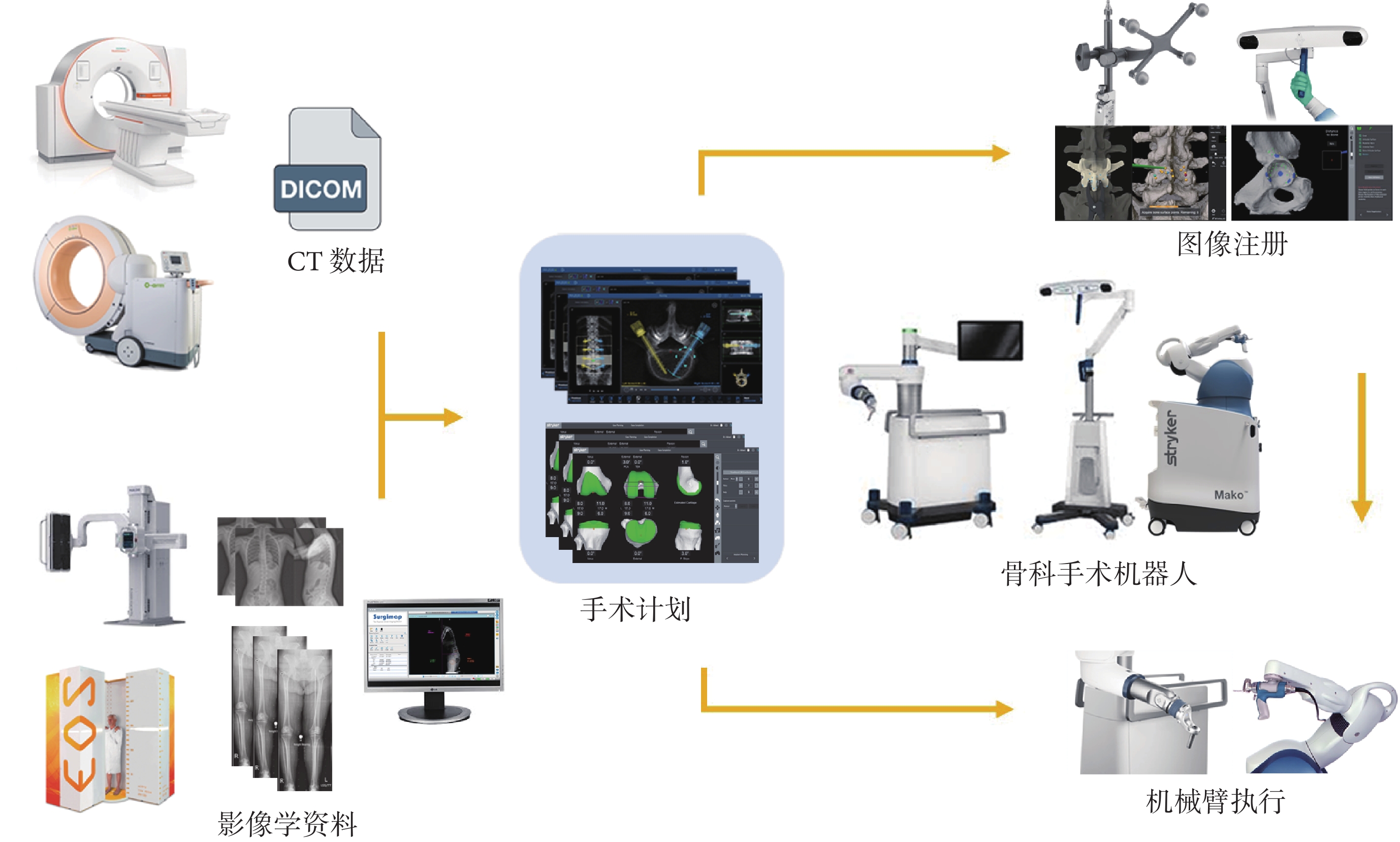 圖2
RSS技術原理示意圖
Figure2.
Schematic illustration of the RSS technology principle
圖2
RSS技術原理示意圖
Figure2.
Schematic illustration of the RSS technology principle
第1代SR是以色列Mazor公司的SpineAssist,其為并聯結構機器人,無完整的六自由度機械臂,通過線纜與主機并聯、利用骨釘固定于患者骨性結構之上,保持患者與手術機器人的相對靜止。SpineAssist在2004年獲美國食品藥品監督管理局(FDA)批準用于腰椎椎弓根螺釘植入、椎體活檢與椎體成形術,隨后被批準應用于胸椎、骶椎手術。其為一種便攜式小型機器人,質量僅250 g,帶有手術計劃軟件、骨性固定架,在影像注冊方面實現了將CT數據與術中透視數據進行配準,對術中目標椎體進行逐個注冊。SpineAssist每個椎體注冊時間長達9 s,機械臂的工作空間局限,需要頻繁手動調整固定架,以確保目標釘道在機械臂工作空間覆蓋范圍以內[4]。
得益于SpineAssist在商業上的成功,以Mazor公司Renaissance為代表的第2代SR應運而生,相比第1代在操作平臺、交互界面、專用手術器械等配套部件上進行了完善,但仍為并聯結構,應用時需將導向器件安裝于患者骨性結構上。Renaissance機械臂組件進行了結構優化,軟件的改進使得椎體注冊、釘道計算等處理速度提高了10倍,術中能夠通過手動、多次C臂X線機透視獲得三維影像,于2011年獲FDA批準用于骨科手術,適應證與SpineAssist相同。第2代SR盡管處理速度顯著提升,但釘道準確度仍在1~2 mm范圍,在臨床實際應用中尚無法達到亞毫米精度。
第3代SR的出現是重要的技術突破,奠定了SR獨立機器人平臺的經典構成,包括主機臺車、串聯六自由度機械臂與追蹤系統。第3代SR帶有完整的六自由度及以上的并聯式機械臂,相比于第2代可達到亞毫米級的定位精度。通過自動對每個椎體進行獨立注冊,以及術中利用光學追蹤獲得患者實時解剖信息,實現實時調整機械臂,消除活動節段椎體間相對運動的影響,基本克服了導向器鉆頭滑動、振動以及組織變形、骨皮質接觸反作用力等因素的影響。第3代SR的代表為以色列Mazor公司Mazor X、法國MEDTECH公司的Rosa Spine等。截至目前,中國已有12個型號的SR獲得國家藥品監督管理局(NMPA)批準用于脊柱手術,基本屬于第3代SR。
SR發展至第4代已進入共同控制機器人的成熟期,其特點是能基于追蹤系統獨立對手術器械、植入物實時追蹤與實時可視化[5]。相比于前3代SR置入輔助導絲后再進行手動植釘操作步驟,第4代SR可直接進行無導絲植釘[6]。第4代SR的代表是以色列Mazor公司的Mazor X Stealth 版本(已被美國Medtronic公司收購)、美國Zimmer Biomet公司的Rosa One Spine、美國Globus Medical公司的Excelsius GPS,以及德國BrainLab公司配合主機使用的Cirq組件。第4代SR在經皮、微創手術方面具有明顯優勢,術者在度過學習曲線后內固定操作效率與安全性會大幅提高,尤其是針對復雜脊柱畸形病例。
但目前SR仍存在局限性。根據自動化水平,機器人可分為6個等級,0級-無自動化、1級-機器人輔助、2級-任務自動化、3級-條件自動化、4級-高度自動化與5級-完全自動化[7],第4代SR系統僅達到3級-條件自動化水平。限于現有技術,SR功能單一,尚不能完成減壓、截骨等操作;可視化方面,尚無法顯示毗鄰脊髓神經、大血管等重要解剖結構;對軟組織的處理依賴術者完成手術入路顯露。隨著人工智能、醫學影像以及機械臂技術的進步,未來將出現更智能的SR。
2 臨床應用進展
2.1 胸腰椎手術
在椎弓根螺釘植入術中,根據腰椎椎弓根較寬、椎體橫徑及體積較大、近尾側節段無脊髓走行的局部解剖特點,其容錯性高于頸胸椎節段。在臨床應用的20年中,隨著SR系統更新迭代,機器人輔助胸、腰椎椎弓根螺釘植入在減少融合術中并發癥、射線暴露及降低翻修率方面的優勢逐步提高[8-9]。
技術改進方面,McCormick等[10]報道了一種胸腰椎RSS技術的“最優開放流程”,采用后正中切開、經肌間隙植釘以減少軟組織牽拉對螺釘植入路徑精度的影響,改進經皮螺釘多切口影響外觀的問題。單一體位的RSS旨在優化前后路聯合手術操作流程,從而減少二次體位擺放、鋪單時間,進而縮短手術時間。Diaz-Aguilar等[11]報道了機器人輔助單一體位斜外側腰椎椎間融合術(oblique lumbar interbody fusion,OLIF)隊列研究,側臥位進行OLIF同時由手術助手根據機器人導向進行經皮螺釘植入及內固定,手術時間(111.2±25.2)min,螺釘植入準確率為95.0%,無螺釘相關并發癥發生。Pham等[12]進行了機器人輔助長節段內固定,術中手術助手在輔助下于側臥位同時植入S2AI螺釘。得益于機器人輔助經皮內固定的微創性與安全性,De Biase等[13]報道了1例在蛛網膜下腔阻滯麻醉下的RSS技術,患者在清醒狀態下接受了經椎間孔腰椎椎間融合術,從而提出一種適用于嚴重譫妄及存在全身麻醉禁忌證患者的手術方式。
機器人輔助螺釘植入路徑規劃靈活,因此在胸腰椎復雜植釘、截骨方面具有優勢。Li等[14]的回顧性研究發現,機器人輔助能顯著提高皮質骨軌跡螺釘植入精度、縮短手術時間,并減少醫療團隊的輻射暴露,從而提升手術安全性和效率。Ho等[15]報道了針對復雜Ⅱ度腰椎滑脫患者的機器人輔助內固定技術,RSS技術實現經椎間皮質原位螺釘固定,增強了內固定結構的把持力和穩定性,同時避免了傳統髂骨螺釘固定的廣泛剝離。目前機器人路徑規劃手術研究尚處于起步階段,結合適應于SR系統的截骨技術,機器人輔助截骨將在復雜畸形矯形中具有廣泛的應用場景[16],基于SR系統的路徑規劃手術有望成為未來重要發展方向。
胸腰椎手術成本效益方面,Menger等[17]的成本矩陣研究共納入557例患者,其中430例行機器人輔助植釘手術,RSS技術費用減少主要體現在因避免翻修和住院時間縮短帶來的收益,其次為減少感染、縮短手術時間,每年成本減少達
2.2 頸椎手術
盡管RSS技術在胸腰椎手術中的應用已有20余年歷史,但在頸椎手術中的應用仍然面臨挑戰。RSS技術在頸椎的應用旨在實現頸椎椎弓根螺釘等內植物的精準植入以及確保手術安全性,大部分SR機型僅被批準用于定位和引導腰骶椎螺釘植入,部分適用于胸椎。Rampersaud等[19]研究指出在中段頸椎、中段腰椎及胸腰段應達到1 mm以內的平移、5° 以內的旋轉安全精度。目前NMPA與FDA批準用于胸腰椎的SR定位精度在2 mm以內、釘道角度精度在2° 以內,而應用于頸椎精度則要求至少在亞毫米級別[20]。Zhou等[21]對機器人輔助技術在頸椎手術中螺釘放置的準確性和安全性進行了系統回顧,納入了160例患者和719枚頸椎螺釘的數據,機器人輔助螺釘放置的優化率和臨床可接受率分別為88.0%和98.4%。Beyer等[22]的系統回顧研究納入了隨機對照試驗、非隨機對照試驗、回顧性案例系列和個案報道,結果顯示6篇文章報道機器人輔助放置482枚頸椎螺釘,平均螺釘偏移為0.95 mm,97.7%螺釘達到了臨床可接受等級。上頸椎固定僅有個案報道,Sacino等[23]應用第4代SR進行C2峽部螺釘固定以及C1、2經關節突螺釘固定,術后影像學檢查示獲得良好固定。
頸椎周圍組織相對薄弱,在全身麻醉術中肌松藥物作用下,其活動性相較于胸腰椎更大,因此對機器人定位的絕對精度、同步刷新率等參數有更高要求。此外,頸椎椎體骨質小,機器人在配準過程中能獲得可靠骨質信息有限,可能出現注冊失敗、注冊錯誤,從而導致嚴重并發癥的發生。頸椎周圍有脊髓、神經以及椎動脈等重要結構,術者需要憑借對解剖的深刻理解、操作中的力反饋進行綜合處理,以確保植釘成功,而目前機器人尚無完善的力學反饋機制,需要更多對機器人輔助頸椎手術中多重保護機制的研究,以進一步提高手術安全性。此外,目前研究多關注頸椎固定的術后即刻影像,需要對融合率等遠期療效進行進一步研究。
2.3 脊柱腫瘤手術
針對脊柱轉移瘤或原發腫瘤,傳統開放手術可能會導致術中大量出血,造成過度組織創傷或神經、血管損傷,進而發生術后嚴重并發癥。對于高齡、有基礎疾病、營養狀況差以及既往接受過化療、放療或糖皮質激素治療的患者,傳統開放手術風險更高。RSS技術在脊柱腫瘤應用中,有使用遙控型機器人進行椎旁腫瘤切除的報道。SR系統應用于脊柱腫瘤手術能減少軟組織顯露及射線暴露,并在精準定位與切除病灶方面存在優勢。Bederman等[24]應用SR系統輔助骶骨骨肉瘤En bloc切除術,通過術前設計軟件規劃多個切緣并執行,從而實現陰性切緣的腫瘤切除,并減少了術中失血。Petrov等[25]詳細描述了采用經口入路的RSS技術,結合機器人引導的超聲骨刀,成功進行了頸椎脊索瘤的En bloc切除術,機器人輔助定位確保了在接近神經和血管結構時,能夠實現高精度骨性結構切除,確保脊柱腫瘤術中切緣陰性與最小損傷。李佳鴻等[26]報道了機器人輔助下對晚期胸腰椎轉移瘤患者內固定的RSS技術,與傳統手術相比術后功能及疼痛評分無顯著差異,但術后輸血以及住院時間均減少。
2.4 經皮脊柱手術
傳統經皮脊柱手術需要多次術中透視,依據術者經驗徒手穿刺達到目標解剖結構,而SR系統可以實現準確解剖定位,在內固定物植入以外的經皮操作定位過程中具有明顯優勢。郭松等[27]應用機器人輔助經皮椎體成形術,機器人組透視(6.96±1.80)次,與徒手穿刺組相比,顯著縮短了術中穿刺時間、減少了術中透視次數。袁偉等[28]報道應用機器人輔助行經皮椎體后凸成形術,發現機器人組能夠更好地矯正壓縮椎體后凸畸形、恢復椎體高度,同時減少骨水泥滲漏,但并未減少術中透視輻射劑量。在椎間孔鏡穿刺應用方面,鄭山等[29]報道了機器人輔助進行經椎間孔鏡入路穿刺,機器人組醫師輻射暴露次數為(7.00±1.45)次,相比透視輔助徒手穿刺組有所減少,機器人組實現了準確經皮穿刺,降低了反復穿刺對患者造成的軟組織損傷與神經損傷風險。受制于技術應用設備與耗材高成本問題,目前機器人輔助的經皮脊柱手術應用受限,隨著技術發展有望在未來得到進一步普及,在優化經皮穿刺技術學習曲線同時提高操作安全性。
3 展望
RSS技術與人工智能技術的融合將成為未來重要發展方向,目前人工智能技術已應用于RSS術前流程計劃。Scherer等[30]報道了一種卷積神經網絡的腰骶椎椎弓根螺釘規劃工具,以提高機器植釘自主性。Esfandiari等[31]報道運用基于深度學習算法提高RSS流程中注冊配準的效率,降低術中配準失敗可能性。Abel等[32]報道利用深度學習實現了用MRI圖像取代CT進行術前規劃的目標,減少RSS流程的射線暴露。人工智能技術的進步將進一步推動SR系統自動化水平,逐步實現術前規劃、術中注冊到執行的全面智能化。
鑒于RSS技術在臨床實踐中的廣泛應用,特異性并發癥已初見端倪,如SR系統定位漂移、二次修改釘道、機器人術中棄用、定位釘相關并發癥等[33]。不同于傳統手術,避免機器人系統的定位漂移、術中棄用與構件設計、圖像算法、設備性能以及安全模式等密切相關。機器人的術中棄用可由注冊失敗、注冊誤差過大或設備故障等導致。定位釘相關并發癥包括定位釘脫落、定位釘淺表皮膚感染以及定位釘相關骨折(由機器人定位釘導致的棘突、髂骨翼骨折[34])等,需要對這類特異性并發癥進一步研究,探索系統且有效的干預措施,制定SR系統標準流程與糾錯臨床指南。
目前,RSS基礎設備費用仍是影響臨床應用的主要因素。據報道,SR設備價格在700萬元以上,而增強現實導航設備的成本僅為SR的1/10 [35]。基于國內大型病例數據,有望在近年研發出更符合我國臨床需求的技術模式,SR可能更趨于便攜化、小型化并支持遠程操作,以減輕基礎設備費用負擔、促進醫療資源下沉。在監管與共識層面,目前針對RSS技術尚缺乏系統的安全性評估方法,需要制定相應的專家共識與臨床指南,確保機器人系統的批準適用范圍根據實際應用精度進行嚴格限定,以保證其臨床應用的安全性與規范化,避免災難性的術中并發癥發生。隨著相關技術的不斷進步和臨床應用的深入,RSS技術將在脊柱外科領域發揮不可或缺的作用。
利益沖突 在課題研究和文章撰寫過程中不存在利益沖突
作者貢獻聲明 黃逸:資料收集、文章撰寫;王巖:綜述構思、觀點形成、文章審閱與修改
機器人輔助脊柱手術(robot-assisted spine surgery,RSS)是脊柱外科手術向微創化、精準化發展的技術進展。目前,隨著大量脊柱手術機器人(spinal robotics,SR)系統進入市場并投入使用,RSS技術逐漸在全球范圍內得到應用(圖1)。本文旨在探討RSS技術從誕生之初到如今廣泛應用的歷史沿革,以及關鍵技術原理、臨床應用現狀與其未來前景。
圖1
RSS技術發展時間軸
Figure1.
Development timeline of RSS technology
1 歷史沿革
根據國際機器人聯合會的定義,具有自動性、可編程性和交互性3個關鍵特征的設備可稱為“機器人”。手術機器人技術源自工業機器人,20世紀50年代末“機器人之父”恩格伯格發明了全球首臺工業機器人Unimate,并將其用于汽車工業生產,80年代機器人技術在醫療領域開始發展。1985年,由工業機器人改造的PUMA200問世,并完成了首臺機器人輔助手術,實現了神經外科手術中精準定位的目標[1]。
隨著機器人技術的進步與臨床治療需求的提高,手術機器人開始被獨立研發,從而區別于以往基于工業機器人的專科化改造。手術機器人按控制原理可分為遙控型機器人、共同控制型機器人及監督控制型機器人。2000年,用于軟組織手術的遙控型機器人達芬奇的出現標志著手術機器人技術的突破,達芬奇在術者直接控制下能完成復雜精細的手術任務,可在嚴格限制的手術空間內完成多自由度靈活操作。
目前,骨科領域廣泛應用的手術機器人類型為共同控制型機器人,即機械臂與術者同時控制手術器械,機器人導向、運行過程中有部分自主性。共同控制型機器人結合了機器人操作穩定、精準度高及減少術者操作疲勞的特點,以及人類在決策、判斷與應對突發情況的優勢,更適合骨科擇期手術這類對數值精度要求較高的應用場景。機器人在關節外科領域的應用早于脊柱外科領域,RoboDoc是美國THINK Surgical公司研發的關節置換機器人,1992年其完成了第1例機器人輔助全髖關節置換術。進入21世紀之后,關節外科機器人快速發展,出現了以美國Stryker公司MAKO、Smith & Nephew公司 CORI為代表的新一代關節置換手術機器人,其手術目標是通過追蹤技術與觸覺反饋技術對骨性結構實現高精度切削操作。
SR的研發亦開端于工業機器人的改造。1992年,Sautot等將PUMA 260連接激光發射器進行了仿真模型骨的椎弓根螺釘植入實驗[2-3]。早期機型針對多種脊柱手術操作,包括經椎弓根螺釘植入、椎體成形術、椎體活檢、椎板切除、神經阻滯、局部電刺激等。由于操作目標不同,受制于技術瓶頸或臨床可用性,學者們放棄了對遙控型機型、由機器人自主操作監督控制機型的進一步開發與應用,以經椎弓根螺釘植入為目標的共同控制機型成為主要研發對象,其一般手術應用流程包括影像規劃、注冊識別、機械臂執行(圖2),以完成椎弓根螺釘植入為手術目標構成了目前RSS技術的基石。從第1個成功廣泛應用于臨床的SR開始,發展至今已有20年,可根據其技術特征大致劃分為四代(表1)。
圖2
RSS技術原理示意圖
Figure2.
Schematic illustration of the RSS technology principle
第1代SR是以色列Mazor公司的SpineAssist,其為并聯結構機器人,無完整的六自由度機械臂,通過線纜與主機并聯、利用骨釘固定于患者骨性結構之上,保持患者與手術機器人的相對靜止。SpineAssist在2004年獲美國食品藥品監督管理局(FDA)批準用于腰椎椎弓根螺釘植入、椎體活檢與椎體成形術,隨后被批準應用于胸椎、骶椎手術。其為一種便攜式小型機器人,質量僅250 g,帶有手術計劃軟件、骨性固定架,在影像注冊方面實現了將CT數據與術中透視數據進行配準,對術中目標椎體進行逐個注冊。SpineAssist每個椎體注冊時間長達9 s,機械臂的工作空間局限,需要頻繁手動調整固定架,以確保目標釘道在機械臂工作空間覆蓋范圍以內[4]。
得益于SpineAssist在商業上的成功,以Mazor公司Renaissance為代表的第2代SR應運而生,相比第1代在操作平臺、交互界面、專用手術器械等配套部件上進行了完善,但仍為并聯結構,應用時需將導向器件安裝于患者骨性結構上。Renaissance機械臂組件進行了結構優化,軟件的改進使得椎體注冊、釘道計算等處理速度提高了10倍,術中能夠通過手動、多次C臂X線機透視獲得三維影像,于2011年獲FDA批準用于骨科手術,適應證與SpineAssist相同。第2代SR盡管處理速度顯著提升,但釘道準確度仍在1~2 mm范圍,在臨床實際應用中尚無法達到亞毫米精度。
第3代SR的出現是重要的技術突破,奠定了SR獨立機器人平臺的經典構成,包括主機臺車、串聯六自由度機械臂與追蹤系統。第3代SR帶有完整的六自由度及以上的并聯式機械臂,相比于第2代可達到亞毫米級的定位精度。通過自動對每個椎體進行獨立注冊,以及術中利用光學追蹤獲得患者實時解剖信息,實現實時調整機械臂,消除活動節段椎體間相對運動的影響,基本克服了導向器鉆頭滑動、振動以及組織變形、骨皮質接觸反作用力等因素的影響。第3代SR的代表為以色列Mazor公司Mazor X、法國MEDTECH公司的Rosa Spine等。截至目前,中國已有12個型號的SR獲得國家藥品監督管理局(NMPA)批準用于脊柱手術,基本屬于第3代SR。
SR發展至第4代已進入共同控制機器人的成熟期,其特點是能基于追蹤系統獨立對手術器械、植入物實時追蹤與實時可視化[5]。相比于前3代SR置入輔助導絲后再進行手動植釘操作步驟,第4代SR可直接進行無導絲植釘[6]。第4代SR的代表是以色列Mazor公司的Mazor X Stealth 版本(已被美國Medtronic公司收購)、美國Zimmer Biomet公司的Rosa One Spine、美國Globus Medical公司的Excelsius GPS,以及德國BrainLab公司配合主機使用的Cirq組件。第4代SR在經皮、微創手術方面具有明顯優勢,術者在度過學習曲線后內固定操作效率與安全性會大幅提高,尤其是針對復雜脊柱畸形病例。
但目前SR仍存在局限性。根據自動化水平,機器人可分為6個等級,0級-無自動化、1級-機器人輔助、2級-任務自動化、3級-條件自動化、4級-高度自動化與5級-完全自動化[7],第4代SR系統僅達到3級-條件自動化水平。限于現有技術,SR功能單一,尚不能完成減壓、截骨等操作;可視化方面,尚無法顯示毗鄰脊髓神經、大血管等重要解剖結構;對軟組織的處理依賴術者完成手術入路顯露。隨著人工智能、醫學影像以及機械臂技術的進步,未來將出現更智能的SR。
2 臨床應用進展
2.1 胸腰椎手術
在椎弓根螺釘植入術中,根據腰椎椎弓根較寬、椎體橫徑及體積較大、近尾側節段無脊髓走行的局部解剖特點,其容錯性高于頸胸椎節段。在臨床應用的20年中,隨著SR系統更新迭代,機器人輔助胸、腰椎椎弓根螺釘植入在減少融合術中并發癥、射線暴露及降低翻修率方面的優勢逐步提高[8-9]。
技術改進方面,McCormick等[10]報道了一種胸腰椎RSS技術的“最優開放流程”,采用后正中切開、經肌間隙植釘以減少軟組織牽拉對螺釘植入路徑精度的影響,改進經皮螺釘多切口影響外觀的問題。單一體位的RSS旨在優化前后路聯合手術操作流程,從而減少二次體位擺放、鋪單時間,進而縮短手術時間。Diaz-Aguilar等[11]報道了機器人輔助單一體位斜外側腰椎椎間融合術(oblique lumbar interbody fusion,OLIF)隊列研究,側臥位進行OLIF同時由手術助手根據機器人導向進行經皮螺釘植入及內固定,手術時間(111.2±25.2)min,螺釘植入準確率為95.0%,無螺釘相關并發癥發生。Pham等[12]進行了機器人輔助長節段內固定,術中手術助手在輔助下于側臥位同時植入S2AI螺釘。得益于機器人輔助經皮內固定的微創性與安全性,De Biase等[13]報道了1例在蛛網膜下腔阻滯麻醉下的RSS技術,患者在清醒狀態下接受了經椎間孔腰椎椎間融合術,從而提出一種適用于嚴重譫妄及存在全身麻醉禁忌證患者的手術方式。
機器人輔助螺釘植入路徑規劃靈活,因此在胸腰椎復雜植釘、截骨方面具有優勢。Li等[14]的回顧性研究發現,機器人輔助能顯著提高皮質骨軌跡螺釘植入精度、縮短手術時間,并減少醫療團隊的輻射暴露,從而提升手術安全性和效率。Ho等[15]報道了針對復雜Ⅱ度腰椎滑脫患者的機器人輔助內固定技術,RSS技術實現經椎間皮質原位螺釘固定,增強了內固定結構的把持力和穩定性,同時避免了傳統髂骨螺釘固定的廣泛剝離。目前機器人路徑規劃手術研究尚處于起步階段,結合適應于SR系統的截骨技術,機器人輔助截骨將在復雜畸形矯形中具有廣泛的應用場景[16],基于SR系統的路徑規劃手術有望成為未來重要發展方向。
胸腰椎手術成本效益方面,Menger等[17]的成本矩陣研究共納入557例患者,其中430例行機器人輔助植釘手術,RSS技術費用減少主要體現在因避免翻修和住院時間縮短帶來的收益,其次為減少感染、縮短手術時間,每年成本減少達
2.2 頸椎手術
盡管RSS技術在胸腰椎手術中的應用已有20余年歷史,但在頸椎手術中的應用仍然面臨挑戰。RSS技術在頸椎的應用旨在實現頸椎椎弓根螺釘等內植物的精準植入以及確保手術安全性,大部分SR機型僅被批準用于定位和引導腰骶椎螺釘植入,部分適用于胸椎。Rampersaud等[19]研究指出在中段頸椎、中段腰椎及胸腰段應達到1 mm以內的平移、5° 以內的旋轉安全精度。目前NMPA與FDA批準用于胸腰椎的SR定位精度在2 mm以內、釘道角度精度在2° 以內,而應用于頸椎精度則要求至少在亞毫米級別[20]。Zhou等[21]對機器人輔助技術在頸椎手術中螺釘放置的準確性和安全性進行了系統回顧,納入了160例患者和719枚頸椎螺釘的數據,機器人輔助螺釘放置的優化率和臨床可接受率分別為88.0%和98.4%。Beyer等[22]的系統回顧研究納入了隨機對照試驗、非隨機對照試驗、回顧性案例系列和個案報道,結果顯示6篇文章報道機器人輔助放置482枚頸椎螺釘,平均螺釘偏移為0.95 mm,97.7%螺釘達到了臨床可接受等級。上頸椎固定僅有個案報道,Sacino等[23]應用第4代SR進行C2峽部螺釘固定以及C1、2經關節突螺釘固定,術后影像學檢查示獲得良好固定。
頸椎周圍組織相對薄弱,在全身麻醉術中肌松藥物作用下,其活動性相較于胸腰椎更大,因此對機器人定位的絕對精度、同步刷新率等參數有更高要求。此外,頸椎椎體骨質小,機器人在配準過程中能獲得可靠骨質信息有限,可能出現注冊失敗、注冊錯誤,從而導致嚴重并發癥的發生。頸椎周圍有脊髓、神經以及椎動脈等重要結構,術者需要憑借對解剖的深刻理解、操作中的力反饋進行綜合處理,以確保植釘成功,而目前機器人尚無完善的力學反饋機制,需要更多對機器人輔助頸椎手術中多重保護機制的研究,以進一步提高手術安全性。此外,目前研究多關注頸椎固定的術后即刻影像,需要對融合率等遠期療效進行進一步研究。
2.3 脊柱腫瘤手術
針對脊柱轉移瘤或原發腫瘤,傳統開放手術可能會導致術中大量出血,造成過度組織創傷或神經、血管損傷,進而發生術后嚴重并發癥。對于高齡、有基礎疾病、營養狀況差以及既往接受過化療、放療或糖皮質激素治療的患者,傳統開放手術風險更高。RSS技術在脊柱腫瘤應用中,有使用遙控型機器人進行椎旁腫瘤切除的報道。SR系統應用于脊柱腫瘤手術能減少軟組織顯露及射線暴露,并在精準定位與切除病灶方面存在優勢。Bederman等[24]應用SR系統輔助骶骨骨肉瘤En bloc切除術,通過術前設計軟件規劃多個切緣并執行,從而實現陰性切緣的腫瘤切除,并減少了術中失血。Petrov等[25]詳細描述了采用經口入路的RSS技術,結合機器人引導的超聲骨刀,成功進行了頸椎脊索瘤的En bloc切除術,機器人輔助定位確保了在接近神經和血管結構時,能夠實現高精度骨性結構切除,確保脊柱腫瘤術中切緣陰性與最小損傷。李佳鴻等[26]報道了機器人輔助下對晚期胸腰椎轉移瘤患者內固定的RSS技術,與傳統手術相比術后功能及疼痛評分無顯著差異,但術后輸血以及住院時間均減少。
2.4 經皮脊柱手術
傳統經皮脊柱手術需要多次術中透視,依據術者經驗徒手穿刺達到目標解剖結構,而SR系統可以實現準確解剖定位,在內固定物植入以外的經皮操作定位過程中具有明顯優勢。郭松等[27]應用機器人輔助經皮椎體成形術,機器人組透視(6.96±1.80)次,與徒手穿刺組相比,顯著縮短了術中穿刺時間、減少了術中透視次數。袁偉等[28]報道應用機器人輔助行經皮椎體后凸成形術,發現機器人組能夠更好地矯正壓縮椎體后凸畸形、恢復椎體高度,同時減少骨水泥滲漏,但并未減少術中透視輻射劑量。在椎間孔鏡穿刺應用方面,鄭山等[29]報道了機器人輔助進行經椎間孔鏡入路穿刺,機器人組醫師輻射暴露次數為(7.00±1.45)次,相比透視輔助徒手穿刺組有所減少,機器人組實現了準確經皮穿刺,降低了反復穿刺對患者造成的軟組織損傷與神經損傷風險。受制于技術應用設備與耗材高成本問題,目前機器人輔助的經皮脊柱手術應用受限,隨著技術發展有望在未來得到進一步普及,在優化經皮穿刺技術學習曲線同時提高操作安全性。
3 展望
RSS技術與人工智能技術的融合將成為未來重要發展方向,目前人工智能技術已應用于RSS術前流程計劃。Scherer等[30]報道了一種卷積神經網絡的腰骶椎椎弓根螺釘規劃工具,以提高機器植釘自主性。Esfandiari等[31]報道運用基于深度學習算法提高RSS流程中注冊配準的效率,降低術中配準失敗可能性。Abel等[32]報道利用深度學習實現了用MRI圖像取代CT進行術前規劃的目標,減少RSS流程的射線暴露。人工智能技術的進步將進一步推動SR系統自動化水平,逐步實現術前規劃、術中注冊到執行的全面智能化。
鑒于RSS技術在臨床實踐中的廣泛應用,特異性并發癥已初見端倪,如SR系統定位漂移、二次修改釘道、機器人術中棄用、定位釘相關并發癥等[33]。不同于傳統手術,避免機器人系統的定位漂移、術中棄用與構件設計、圖像算法、設備性能以及安全模式等密切相關。機器人的術中棄用可由注冊失敗、注冊誤差過大或設備故障等導致。定位釘相關并發癥包括定位釘脫落、定位釘淺表皮膚感染以及定位釘相關骨折(由機器人定位釘導致的棘突、髂骨翼骨折[34])等,需要對這類特異性并發癥進一步研究,探索系統且有效的干預措施,制定SR系統標準流程與糾錯臨床指南。
目前,RSS基礎設備費用仍是影響臨床應用的主要因素。據報道,SR設備價格在700萬元以上,而增強現實導航設備的成本僅為SR的1/10 [35]。基于國內大型病例數據,有望在近年研發出更符合我國臨床需求的技術模式,SR可能更趨于便攜化、小型化并支持遠程操作,以減輕基礎設備費用負擔、促進醫療資源下沉。在監管與共識層面,目前針對RSS技術尚缺乏系統的安全性評估方法,需要制定相應的專家共識與臨床指南,確保機器人系統的批準適用范圍根據實際應用精度進行嚴格限定,以保證其臨床應用的安全性與規范化,避免災難性的術中并發癥發生。隨著相關技術的不斷進步和臨床應用的深入,RSS技術將在脊柱外科領域發揮不可或缺的作用。
利益沖突 在課題研究和文章撰寫過程中不存在利益沖突
作者貢獻聲明 黃逸:資料收集、文章撰寫;王巖:綜述構思、觀點形成、文章審閱與修改

