引用本文: 袁子祁, 李楊, 田華. 機器人輔助人工全髖關節置換術對下肢長度和偏心距恢復的影響. 中國修復重建外科雜志, 2024, 38(11): 1307-1311. doi: 10.7507/1002-1892.202405034 復制
版權信息: ?四川大學華西醫院華西期刊社《中國修復重建外科雜志》版權所有,未經授權不得轉載、改編
對于終末期髖關節疾病,人工全髖關節置換術(total hip arthroplasty,THA)是最有效、成熟的治療方式,目前已廣泛在臨床應用[1]。雙下肢不等長(limb length discrepancy,LLD)以及聯合偏心距(global offset,GO)是影響THA療效的主要因素。研究表明,THA術后LLD過大可能引起患者步態異常、腰痛等多種癥狀[2],而兩側GO差異偏大也會影響肢體長度、臀中肌力臂等因素,不利于患者功能恢復。近年來,為了提高THA術中假體放置的精確度和穩定性、精準重建下肢長度和股骨偏心距,機器人輔助手術操作應運而生,研究顯示其能有效提高手術精度[3]。為了進一步驗證該結論,我們進行了一項回顧性研究,收集機器人輔助THA和傳統THA患者臨床資料,比較患者間LLD和GO差值兩項指標的差異。報告如下。
1 臨床資料
1.1 一般資料
患者納入標準:① 單側初次THA(對側髖關節正常或已經成功接受髖關節置換);② 采用Mako關節手術機器人(Stryker公司,美國)輔助THA或傳統THA;③ 年齡18~80歲;④ 手術由同一工作組術者完成。排除標準:① Crown Ⅲ、Ⅳ型先天性髖臼發育不良引起的繼發性骨關節炎;② 患嚴重骨質疏松(T值<?3.5);③ 身體質量指數>30 kg/m2;④ 有腰椎內固定手術史;⑤ 存在患側骨盆傾斜或脊柱側彎。
2019年9月—2023年8月共316例單側初次THA患者符合選擇標準納入研究。采用機器人輔助THA 117例(A組)、傳統THA199例(B組)。兩組患者性別、年齡、置換側別比較,差異均無統計學意義(P>0.05);術前診斷組間比較差異有統計學意義(P<0.05)。見表1。
1.2 手術方法
兩組患者于椎管內麻醉或全身麻醉后取側臥位,經后外側入路手術。置換均采用美國Stryker公司假體,包括Tritanium或Trident生物型髖臼杯以及Accolade Ⅱ股骨柄,配備陶瓷股骨頭和高交聯聚乙烯內襯。術中未行床旁X線透視檢查。
A組:術前所有患者行下肢CT掃描,掃描范圍為骨盆頂部至踝關節,Mako系統工程師團隊基于掃描數據行三維建模;術者及工程師基于該三維模型規劃手術方案,確定假體安裝位置、型號,并在建模中安裝所確定的假體,以預測下肢長度、股骨偏心距的恢復。術中,首先在骨盆上打入螺釘,安裝帶有紅外線反射球的骨盆參考架;然后暴露并脫位髖關節,在股骨轉子間安裝股骨參考架。注冊股骨近端與股骨頭,在導航系統指引下完成股骨頸截骨。根據術前計劃進行股骨開髓,安裝試體柄后進行驗證,導航系統顯示當前股骨前傾角并預測下肢長度、GO變化。然后進行髖臼側注冊,使用合適尺寸髖臼銼在機械臂輔助下磨銼髖臼,并植入相應髖臼假體。在髖臼磨銼和假體植入過程中,機器人系統能顯示假體安放位置和角度。髖臼假體和內襯安裝后,植入試體柄和試體球頭,復位髖關節,根據導航系統顯示的髖關節聯合前傾角、GO及下肢長度變化、髖關節穩定性,選擇合適頸干角的股骨假體和合適尺寸的股骨頭假體,提升髖關節穩定性,恢復髖關節偏心距和下肢長度。最后,放置股骨假體后安裝球頭,再次檢查髖關節穩定性和下肢長度,安裝完成后重建外旋肌群和關節囊,沖洗后關閉切口。
B組:術前術者基于患者X線片規劃手術方案,確定假體安放位置及型號、股骨頸截骨水平、需要調整的下肢長度。術中,首先按照術前計劃截斷股骨頸,保留適當股骨距長度;暴露髖臼,進行髖臼側磨挫,根據解剖標志(如髖臼橫韌帶或髖臼邊緣)、磨銼手柄方向和角度,確定髖臼假體前傾角和外展角度。然后進行股骨開髓,從最小號試體柄開始至試體柄打入穩定,安放頭頸試體復位后,各向活動觀察髖關節穩定性,通過Shuck試驗和Drop kick試驗判斷下肢緊張程度,并通過觸摸膝關節和足跟的位置、比較股骨頭旋轉中心和大轉子間高度差異,判斷下肢長度,并以此選擇股骨頭型號。最后,放置股骨假體后安裝球頭,同A組操作完成手術。
1.3 術后處理及療效評價指標
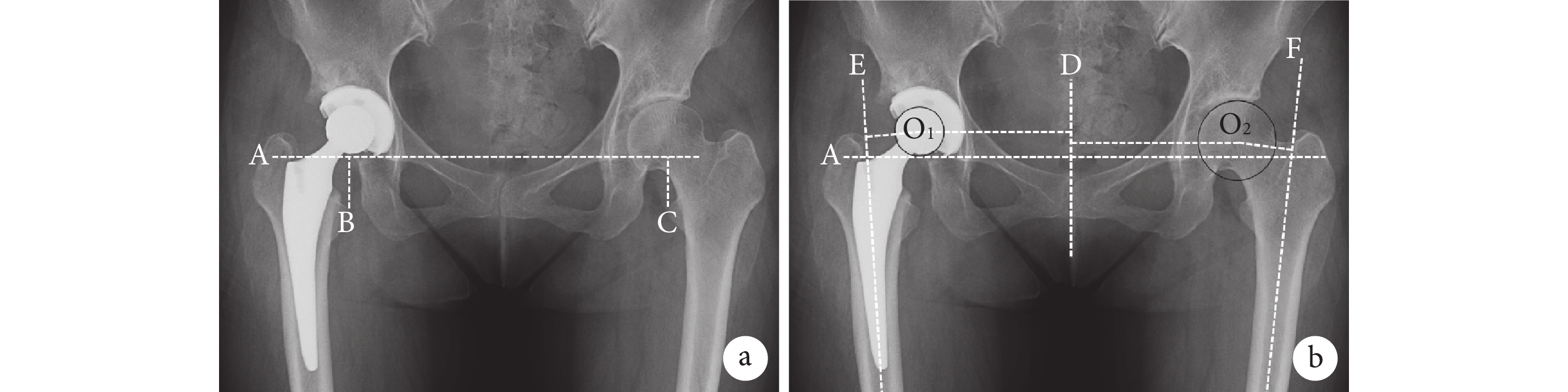
兩組術后處理方法一致。常規給于抗凝、止血、鎮痛、抗炎等治療。術后12~24 h,患者在醫護人員指導下開始髖關節功能康復訓練。患者出院前(術后第3~4天)攝骨盆正位或髖關節正側位X線片。基于骨盆正位X線片測量LLD及GO。測量方法:① LLD:作兩側髖臼淚滴最低點連線(線A),測量兩側股骨小轉子頂點至淚滴連線的垂直距離(線B、C),術側與健側差值即為LLD。② GO:GO為髖臼偏心距(acetabulum offset,AO)和股骨偏心距(femoral offset,FO)之和[4]。取兩側股骨頭中心點(點O1、O2),并在恥骨聯合中點處作淚滴連線(線A)的中垂線(線D),測量兩側股骨頭中心點至該垂線的距離,即為AO。作兩側股骨干縱軸(線E、F),分別測量兩側股骨頭中心點至對應側軸線的距離,即為FO;計算健患側GO差值。上述指標取絕對值進行組間比較。重建差異目標值為0 mm,分別設定LLD臨界值為3、5、10 mm以及GO差值臨界值為5、10、20 mm,記錄相關患者構成比。見圖1。
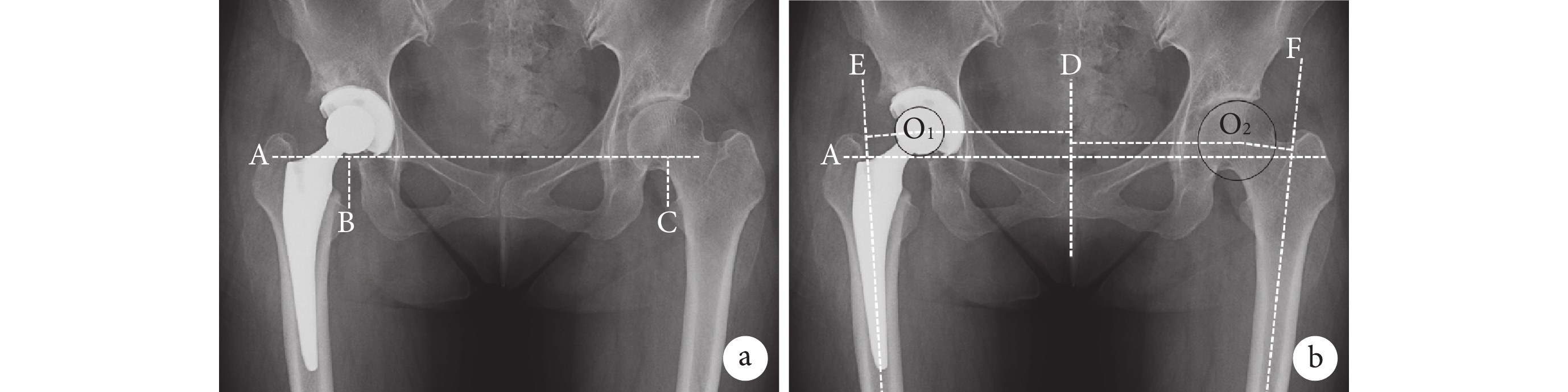 圖1
X線片測量示意圖
圖1
X線片測量示意圖
a. LLD;b. GO
Figure1. Schematic diagram of X-ray film measurementa. LLD; b. GO
1.4 統計學方法
采用SPSS26.0統計軟件進行分析。計量資料經Kolmogorov-Smirnov檢驗近似正態分布,數據以均數±標準差表示,組間比較采用獨立樣本t檢驗;計數資料組間比較采用四格表卡方檢驗或列聯表卡方檢驗。檢驗水準取雙側α=0.05。
2 結果
兩組手術均順利完成。術后影像學測量示A組LLD、GO差值均低于B組,差異有統計學意義(P<0.05)。其中, A組 LLD>3 mm、>5 mm、>10 mm 患者分別為32例(27.4%)、5例(4.3%)、0例(0),B組為115例(57.8%)、75例(37.7%)、22例(11.1%);上述組間差異均有統計學意義(P<0.05)。A組 GO差值>5 mm、>10 mm、>20 mm 患者分別為40例(34.2%)、3例(2.6%)、0例(0),B組分別為103例(51.8%)、54例(27.1%)、7例(3.5%);除>20 mm組間差異無統計學意義(P>0.05)外,其余組間差異有統計學意義(P<0.05)。見表2。
3 討論
THA術后雙下肢長度和偏心距恢復對于手術療效和患者滿意度有著重要意義。研究表明,FO和AO重建差異偏大會導致髖關節磨損明顯增加和外展肌力降低[5]。一項綜述提出THA術后患者不滿意主要原因是雙下肢存在長度差異[6]。THA術后LLD<10 mm時,患者耐受性較好且不會出現癥狀;而LLD<5 mm時,患者幾乎無法察覺到差距[7]。然而,傳統THA術中術者僅能憑借經驗判斷關節假體植入位置和角度,導致LLD和GO差值較大。有研究顯示傳統THA術后LLD>10 mm患者比例可達到20%[8]。
機器人輔助系統是將計算機導航與機械臂結合,能在術前為患者制定個性化手術方案,并在術中指導術者操作,通過機械臂輔助定位,協助術者將假體植入理想位置。目前,機器人輔助THA在假體植入精確度(LLD和GO差值)方面的優勢已獲得一系列研究驗證。Kumar等[9]Meta分析發現經機器人輔助可以精準安放假體,從而顯著減小肢體長度差異;李楊等[10]研究表明機器人輔助THA在下肢長度恢復方面更具優勢;Sai Sathikumar等[11]也認為機器人輔助髖臼杯植入有利于提高位置準確性。然而,也有相關研究獲得了不同的結論[12-14]。因此,機器人輔助THA與傳統THA之間的效果差異仍存在爭議。
本研究中,兩組患者術后LLD差異均有統計學意義,且臨界值分別為3、5、10 mm時,機器人輔助手術結果均優于傳統手術(P<0.05)。而且機器人輔助THA術后無LLD>10 mm患者,即所有患者均難以察覺雙下肢長度存在差異的情況。這表明使用機器人輔助THA在下肢長度恢復方面相較傳統手術方法有著十分顯著優勢。在GO差值方面,兩組差異亦有統計學意義,且臨界值分別為5、10、20 mm時,機器人輔助手術結果均優于傳統手術,其中前兩項差異有統計學意義(P<0.05);雖臨界值20 mm組間差異無統計學意義,但機器人輔助術后無>20 mm患者。表明使用機器人輔助THA在偏心距恢復方面較傳統手術有一定優勢。本研究結果與國內外既往相關研究結果[9-11]相近,我們分析獲得該結果原因主要為機器人輔助手術可在術前根據三維模型確定假體型號,在術中通過機械臂指導實現術前計劃,并實時測量下肢長度和偏心距的差異進行微調,因此能夠避免傳統手術的經驗性與盲目性,在下肢長度與偏心距的恢復上取得更好效果。
本研究有一定局限性:① 本研究為回顧性研究,兩組術前診斷分布有一定差異,但不同術前診斷對術后LLD和GO沒有顯著影響。② 本研究中只涉及下肢長度與偏心距的恢復,缺少術后隨訪評價患者功能和滿意度,未從功能方面評估下肢長度與偏心距差異對患者的影響,還需進一步研究。③ 絕大多數患者未攝下肢全長X線片,因此LLD測量是基于骨盆正位X線片股骨小轉子頂點至淚滴連線距離,判斷下肢長度并不完全準確。④ 受患者拍攝體位、透照角度影響,X線片測量結果存在一定偏差。
綜上述,機器人輔助THA較傳統THA有一定優勢,有利于患者術后雙腿下肢長度和偏心距的恢復。但對于機器人輔助THA與傳統THA間療效差異,還需要更大樣本隨機對照試驗來進一步驗證。
利益沖突 在課題研究和文章撰寫過程中不存在利益沖突;經費支持沒有影響文章觀點和對研究數據客觀結果的統計分析及其報道
倫理聲明 研究方案經北京大學第三醫院醫學科學研究倫理委員會批準[(2022)醫倫審第(318-01)號]
作者貢獻聲明 袁子祁:數據收集整理及統計分析、文章撰寫;李楊:研究設計、研究實施、文章審閱、經費支持;田華:行政支持、技術指導
對于終末期髖關節疾病,人工全髖關節置換術(total hip arthroplasty,THA)是最有效、成熟的治療方式,目前已廣泛在臨床應用[1]。雙下肢不等長(limb length discrepancy,LLD)以及聯合偏心距(global offset,GO)是影響THA療效的主要因素。研究表明,THA術后LLD過大可能引起患者步態異常、腰痛等多種癥狀[2],而兩側GO差異偏大也會影響肢體長度、臀中肌力臂等因素,不利于患者功能恢復。近年來,為了提高THA術中假體放置的精確度和穩定性、精準重建下肢長度和股骨偏心距,機器人輔助手術操作應運而生,研究顯示其能有效提高手術精度[3]。為了進一步驗證該結論,我們進行了一項回顧性研究,收集機器人輔助THA和傳統THA患者臨床資料,比較患者間LLD和GO差值兩項指標的差異。報告如下。
1 臨床資料
1.1 一般資料
患者納入標準:① 單側初次THA(對側髖關節正常或已經成功接受髖關節置換);② 采用Mako關節手術機器人(Stryker公司,美國)輔助THA或傳統THA;③ 年齡18~80歲;④ 手術由同一工作組術者完成。排除標準:① Crown Ⅲ、Ⅳ型先天性髖臼發育不良引起的繼發性骨關節炎;② 患嚴重骨質疏松(T值<?3.5);③ 身體質量指數>30 kg/m2;④ 有腰椎內固定手術史;⑤ 存在患側骨盆傾斜或脊柱側彎。
2019年9月—2023年8月共316例單側初次THA患者符合選擇標準納入研究。采用機器人輔助THA 117例(A組)、傳統THA199例(B組)。兩組患者性別、年齡、置換側別比較,差異均無統計學意義(P>0.05);術前診斷組間比較差異有統計學意義(P<0.05)。見表1。
1.2 手術方法
兩組患者于椎管內麻醉或全身麻醉后取側臥位,經后外側入路手術。置換均采用美國Stryker公司假體,包括Tritanium或Trident生物型髖臼杯以及Accolade Ⅱ股骨柄,配備陶瓷股骨頭和高交聯聚乙烯內襯。術中未行床旁X線透視檢查。
A組:術前所有患者行下肢CT掃描,掃描范圍為骨盆頂部至踝關節,Mako系統工程師團隊基于掃描數據行三維建模;術者及工程師基于該三維模型規劃手術方案,確定假體安裝位置、型號,并在建模中安裝所確定的假體,以預測下肢長度、股骨偏心距的恢復。術中,首先在骨盆上打入螺釘,安裝帶有紅外線反射球的骨盆參考架;然后暴露并脫位髖關節,在股骨轉子間安裝股骨參考架。注冊股骨近端與股骨頭,在導航系統指引下完成股骨頸截骨。根據術前計劃進行股骨開髓,安裝試體柄后進行驗證,導航系統顯示當前股骨前傾角并預測下肢長度、GO變化。然后進行髖臼側注冊,使用合適尺寸髖臼銼在機械臂輔助下磨銼髖臼,并植入相應髖臼假體。在髖臼磨銼和假體植入過程中,機器人系統能顯示假體安放位置和角度。髖臼假體和內襯安裝后,植入試體柄和試體球頭,復位髖關節,根據導航系統顯示的髖關節聯合前傾角、GO及下肢長度變化、髖關節穩定性,選擇合適頸干角的股骨假體和合適尺寸的股骨頭假體,提升髖關節穩定性,恢復髖關節偏心距和下肢長度。最后,放置股骨假體后安裝球頭,再次檢查髖關節穩定性和下肢長度,安裝完成后重建外旋肌群和關節囊,沖洗后關閉切口。
B組:術前術者基于患者X線片規劃手術方案,確定假體安放位置及型號、股骨頸截骨水平、需要調整的下肢長度。術中,首先按照術前計劃截斷股骨頸,保留適當股骨距長度;暴露髖臼,進行髖臼側磨挫,根據解剖標志(如髖臼橫韌帶或髖臼邊緣)、磨銼手柄方向和角度,確定髖臼假體前傾角和外展角度。然后進行股骨開髓,從最小號試體柄開始至試體柄打入穩定,安放頭頸試體復位后,各向活動觀察髖關節穩定性,通過Shuck試驗和Drop kick試驗判斷下肢緊張程度,并通過觸摸膝關節和足跟的位置、比較股骨頭旋轉中心和大轉子間高度差異,判斷下肢長度,并以此選擇股骨頭型號。最后,放置股骨假體后安裝球頭,同A組操作完成手術。
1.3 術后處理及療效評價指標
兩組術后處理方法一致。常規給于抗凝、止血、鎮痛、抗炎等治療。術后12~24 h,患者在醫護人員指導下開始髖關節功能康復訓練。患者出院前(術后第3~4天)攝骨盆正位或髖關節正側位X線片。基于骨盆正位X線片測量LLD及GO。測量方法:① LLD:作兩側髖臼淚滴最低點連線(線A),測量兩側股骨小轉子頂點至淚滴連線的垂直距離(線B、C),術側與健側差值即為LLD。② GO:GO為髖臼偏心距(acetabulum offset,AO)和股骨偏心距(femoral offset,FO)之和[4]。取兩側股骨頭中心點(點O1、O2),并在恥骨聯合中點處作淚滴連線(線A)的中垂線(線D),測量兩側股骨頭中心點至該垂線的距離,即為AO。作兩側股骨干縱軸(線E、F),分別測量兩側股骨頭中心點至對應側軸線的距離,即為FO;計算健患側GO差值。上述指標取絕對值進行組間比較。重建差異目標值為0 mm,分別設定LLD臨界值為3、5、10 mm以及GO差值臨界值為5、10、20 mm,記錄相關患者構成比。見圖1。
圖1
X線片測量示意圖
a. LLD;b. GO
Figure1. Schematic diagram of X-ray film measurementa. LLD; b. GO
1.4 統計學方法
采用SPSS26.0統計軟件進行分析。計量資料經Kolmogorov-Smirnov檢驗近似正態分布,數據以均數±標準差表示,組間比較采用獨立樣本t檢驗;計數資料組間比較采用四格表卡方檢驗或列聯表卡方檢驗。檢驗水準取雙側α=0.05。
2 結果
兩組手術均順利完成。術后影像學測量示A組LLD、GO差值均低于B組,差異有統計學意義(P<0.05)。其中, A組 LLD>3 mm、>5 mm、>10 mm 患者分別為32例(27.4%)、5例(4.3%)、0例(0),B組為115例(57.8%)、75例(37.7%)、22例(11.1%);上述組間差異均有統計學意義(P<0.05)。A組 GO差值>5 mm、>10 mm、>20 mm 患者分別為40例(34.2%)、3例(2.6%)、0例(0),B組分別為103例(51.8%)、54例(27.1%)、7例(3.5%);除>20 mm組間差異無統計學意義(P>0.05)外,其余組間差異有統計學意義(P<0.05)。見表2。
3 討論
THA術后雙下肢長度和偏心距恢復對于手術療效和患者滿意度有著重要意義。研究表明,FO和AO重建差異偏大會導致髖關節磨損明顯增加和外展肌力降低[5]。一項綜述提出THA術后患者不滿意主要原因是雙下肢存在長度差異[6]。THA術后LLD<10 mm時,患者耐受性較好且不會出現癥狀;而LLD<5 mm時,患者幾乎無法察覺到差距[7]。然而,傳統THA術中術者僅能憑借經驗判斷關節假體植入位置和角度,導致LLD和GO差值較大。有研究顯示傳統THA術后LLD>10 mm患者比例可達到20%[8]。
機器人輔助系統是將計算機導航與機械臂結合,能在術前為患者制定個性化手術方案,并在術中指導術者操作,通過機械臂輔助定位,協助術者將假體植入理想位置。目前,機器人輔助THA在假體植入精確度(LLD和GO差值)方面的優勢已獲得一系列研究驗證。Kumar等[9]Meta分析發現經機器人輔助可以精準安放假體,從而顯著減小肢體長度差異;李楊等[10]研究表明機器人輔助THA在下肢長度恢復方面更具優勢;Sai Sathikumar等[11]也認為機器人輔助髖臼杯植入有利于提高位置準確性。然而,也有相關研究獲得了不同的結論[12-14]。因此,機器人輔助THA與傳統THA之間的效果差異仍存在爭議。
本研究中,兩組患者術后LLD差異均有統計學意義,且臨界值分別為3、5、10 mm時,機器人輔助手術結果均優于傳統手術(P<0.05)。而且機器人輔助THA術后無LLD>10 mm患者,即所有患者均難以察覺雙下肢長度存在差異的情況。這表明使用機器人輔助THA在下肢長度恢復方面相較傳統手術方法有著十分顯著優勢。在GO差值方面,兩組差異亦有統計學意義,且臨界值分別為5、10、20 mm時,機器人輔助手術結果均優于傳統手術,其中前兩項差異有統計學意義(P<0.05);雖臨界值20 mm組間差異無統計學意義,但機器人輔助術后無>20 mm患者。表明使用機器人輔助THA在偏心距恢復方面較傳統手術有一定優勢。本研究結果與國內外既往相關研究結果[9-11]相近,我們分析獲得該結果原因主要為機器人輔助手術可在術前根據三維模型確定假體型號,在術中通過機械臂指導實現術前計劃,并實時測量下肢長度和偏心距的差異進行微調,因此能夠避免傳統手術的經驗性與盲目性,在下肢長度與偏心距的恢復上取得更好效果。
本研究有一定局限性:① 本研究為回顧性研究,兩組術前診斷分布有一定差異,但不同術前診斷對術后LLD和GO沒有顯著影響。② 本研究中只涉及下肢長度與偏心距的恢復,缺少術后隨訪評價患者功能和滿意度,未從功能方面評估下肢長度與偏心距差異對患者的影響,還需進一步研究。③ 絕大多數患者未攝下肢全長X線片,因此LLD測量是基于骨盆正位X線片股骨小轉子頂點至淚滴連線距離,判斷下肢長度并不完全準確。④ 受患者拍攝體位、透照角度影響,X線片測量結果存在一定偏差。
綜上述,機器人輔助THA較傳統THA有一定優勢,有利于患者術后雙腿下肢長度和偏心距的恢復。但對于機器人輔助THA與傳統THA間療效差異,還需要更大樣本隨機對照試驗來進一步驗證。
利益沖突 在課題研究和文章撰寫過程中不存在利益沖突;經費支持沒有影響文章觀點和對研究數據客觀結果的統計分析及其報道
倫理聲明 研究方案經北京大學第三醫院醫學科學研究倫理委員會批準[(2022)醫倫審第(318-01)號]
作者貢獻聲明 袁子祁:數據收集整理及統計分析、文章撰寫;李楊:研究設計、研究實施、文章審閱、經費支持;田華:行政支持、技術指導