引用本文: 陳龍飛, 宋岳, 谷旺, 南少奎, 孟鄭鑫, 李海峰. Naton機器人輔助膝關節內側單髁置換術假體型號選擇的準確性研究. 中國修復重建外科雜志, 2024, 38(11): 1312-1316. doi: 10.7507/1002-1892.202406060 復制
版權信息: ?四川大學華西醫院華西期刊社《中國修復重建外科雜志》版權所有,未經授權不得轉載、改編
膝關節骨關節炎多發生于中老年人群,為膝關節軟骨磨損、骨質增生引起的慢性關節疾病,造成患者膝關節畸形及長期疼痛,嚴重影響日常生活[1]。膝關節骨關節炎可累及任何膝關節間室,常見內側間室病變。與人工全膝關節置換術相比,人工單髁置換術(unicompartmental knee arthroplasty,UKA)具有組織損傷小、出血量少、骨量保存較多、并發癥少,以及患者術后恢復快、膝關節感覺更接近術前等優點[2]。然而,UKA因切口小、截骨量少、對恢復膝關節術后韌帶張力要求高,其置換假體型號選擇難度與人工全膝關節置換術相比更高。適配的假體對于避免術后關節疼痛、彈響及早期無菌性松動至關重要,而假體不適配會導致假體覆蓋不足、應力性骨折或假體懸垂、激惹周圍韌帶軟組織,可能引起襯墊磨損或假體無菌性松動[3]。
近年來,骨科手術機器人輔助技術在臨床獲得廣泛應用,并顯示出明顯優勢。研究表明,手術機器人輔助UKA可以提高截骨準確性,最大限度避免韌帶軟組織損傷[4]。但是目前國內外關于機器人輔助UKA對于假體型號選擇的準確性鮮有報道。北京納通科技集團設計的Naton機器人系統配備單髁及全膝關節假體系統,可以進行UKA和人工全膝關節置換術;術前根據患者CT進行假體個性化三維規劃,術中在機器人系統輔助下,通過導航模塊實時監測,術者可以精準截骨,并且根據需要實時調整截骨量、假體位置、角度和韌帶軟組織平衡,其創傷小,可盡量保留正常軟骨及韌帶軟組織,有利于患者術后康復鍛煉。本研究通過比較UKA術中實際使用假體型號與機器人輔助術前計劃假體型號的差異,明確Naton機器人輔助UKA術前假體型號選擇的準確性。報告如下。
1 臨床資料
1.1 一般資料
患者納入標準:① 單純膝關節內側間室骨關節炎/骨壞死;② 膝關節內翻畸形<15°,屈曲攣縮畸形<15°;③ 膝關節內、外側副韌帶完整連續;④ 接受Naton機器人輔助UKA治療;⑤ 年齡50~80歲;⑥ 身體質量指數<35 kg/m2;⑦ 無患側膝關節周圍感染及全身感染;⑧ 既往患側膝關節無手術史。
排除標準:① 存在活動性、局部或全身感染;② 類風濕性關節炎等炎性關節炎;③ 膝關節半脫位距離>0.5 cm;④ 膝關節韌帶出現廣泛性松弛。
2023年6月—2024年7月,中國人民解放軍總醫院第四醫學中心骨科醫學部收治患者中,100例(110膝)符合選擇標準納入研究。其中,男37例(40膝),女63例(70膝);年齡59~71歲,平均65.4歲。左側47膝,右側63膝。身體質量指數 22.2~28.6 kg/m2,平均25.4 kg/m2。病程1~8年,平均3.4年。
1.2 術前規劃方法
患者術前需行下肢三段或全長(包含踝關節和股骨頭中心)CT 掃描,膝關節影像層厚<1 mm且三段必須同一次采集(避免多次采集)。將掃描數據輸入Naton機器人系統,進行影像分割與建模,然后在三維模型上確定髖關節中心、內上髁、外上髁、膝關節中心、后交叉韌帶止點中點、脛骨結節、內踝、外踝等骨性標志,依據以上骨性標志確定下肢力線、股骨屈伸旋轉軸線、脛骨內外旋轉軸線,計算術中股骨及脛骨截骨量、假體位置及型號,模擬假體的最優匹配。
1.3 手術方法
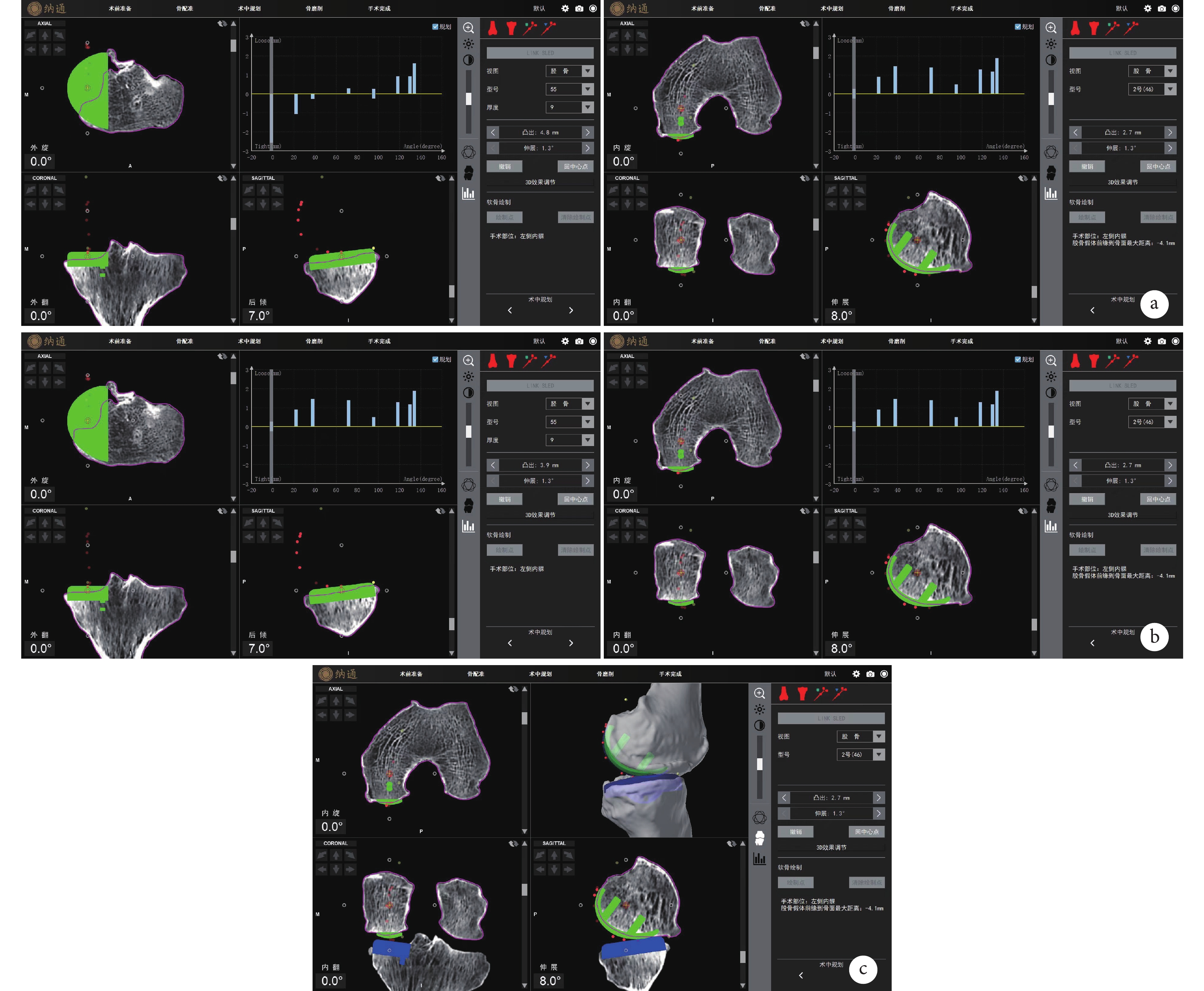
本組手術由同一組醫師完成,選擇LINK sled膝關節單髁假體(LINK公司,德國)。患者于全身麻醉(84例)或椎管內麻醉(16例)下,患肢常規消毒并鋪放無菌巾單后,護皮膜覆蓋患肢皮膚,助手同步行機械臂注冊,在股骨遠端和脛骨中段各固定2枚骨針,安裝脛骨和股骨示蹤器。取患膝髕旁內側切口,起于髕骨上方、止于脛骨結節上內1 cm,切開皮膚、皮下組織,自股四頭肌向遠端沿髕骨內側達脛骨結節內上方切開關節囊,在切口內安裝股骨及脛骨檢查釘,活動膝關節探查見其中109膝內側間室關節軟骨嚴重破壞廣泛剝脫,骨贅增生,前交叉韌帶完整,外側間室軟骨正常,髕股關節軟骨良好,符合前內側間室骨關節炎診斷,適合行UKA;另1膝高齡女性患者前交叉韌帶斷裂,但綜合患者基礎條件以及選擇固定平臺單髁假體,最終仍確定UKA。然后,采集術中標志點,搖腿確認髖關節中心點,依次完成股骨內外側髁、內外踝尖端等解剖標志點的注冊,再根據導航工作臺指示依次完成關節骨面的配準,去除骨贅及內側半月板,在術前規劃假體型號模擬下,屈伸膝關節檢查內側間室松緊度及軟組織張力,獲得關節間隙數值并形成柱狀圖(圖1a)。根據軟件顯示的膝關節屈曲角度、內外翻、內外旋數值以及關節間隙數值,判斷上述指標是否達要求,并對應微調股骨及脛骨平臺的截骨量、假體角度及位置(圖1b),以保證獲得合適的下肢力線以及關節間隙松緊度,此時如術前規劃假體型號與微調后的股骨及脛骨平臺不匹配,需進行更換(圖1c)。驗證脛骨檢查釘及擺據位置,行脛骨水平面截骨,然后將擺據更換成6.5 mm磨鉆行脛骨矢狀面截骨和股骨遠端截骨,再更換成5.5 mm磨鉆行股骨假體安裝柱打孔,更換成3.0 mm磨鉆行脛骨假體龍骨開槽。沖洗切口,安裝假體,骨水泥硬化后逐層關閉切口并包扎,均不放置引流管。記錄術中實際使用假體型號,與術前規劃假體型號進行比較;同時記錄不一致假體中對應的膝關節屈、伸間隙(<0.5 mm、>2.0 mm)情況。
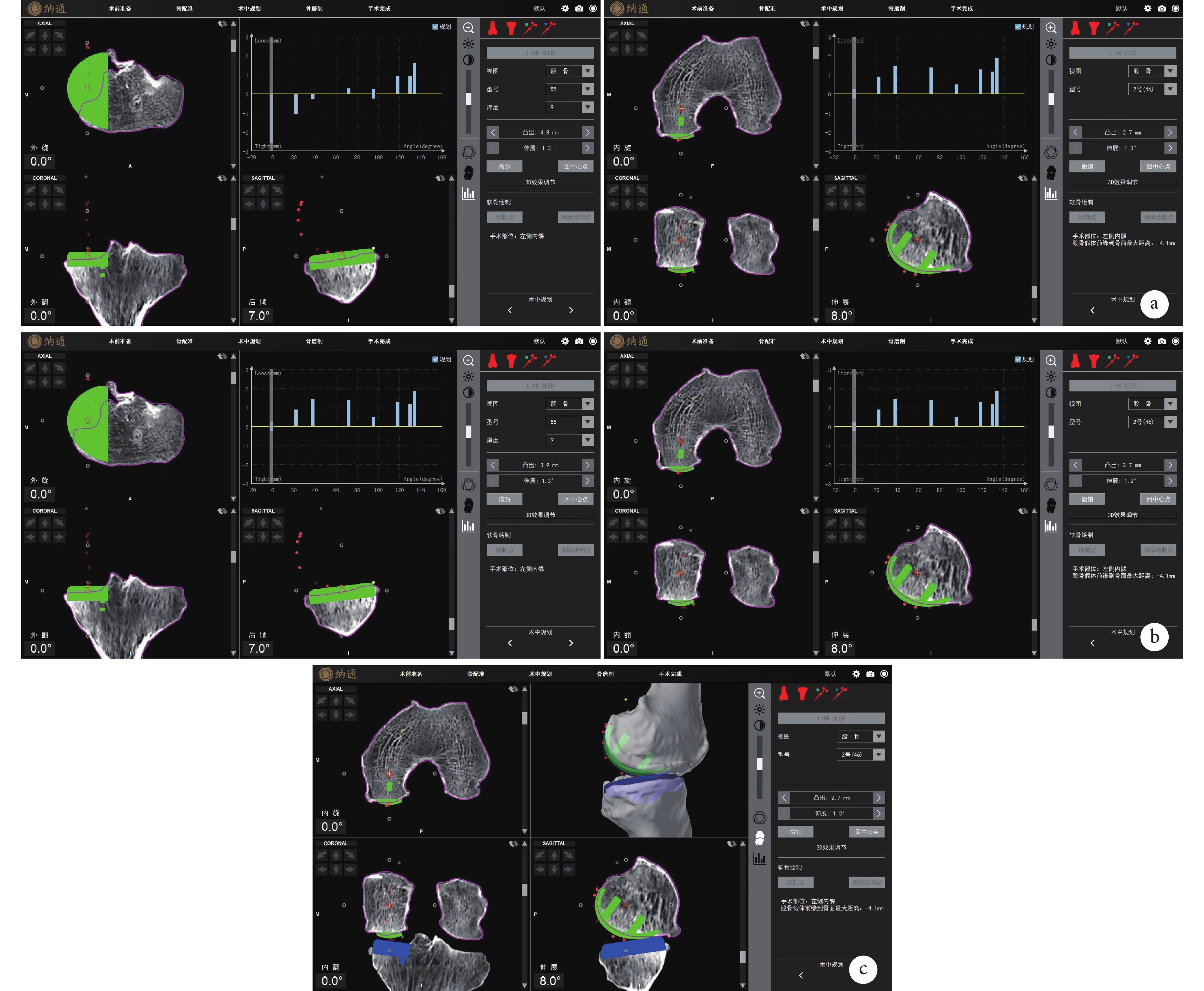 圖1
Naton機器人輔助UKA示意圖
圖1
Naton機器人輔助UKA示意圖
a. 術前規劃的假體位置、大小、角度及關節間隙;b. 術中微調后的假體位置、大小、角度及關節間隙;c. 截骨前的最終規劃
Figure1. Schematic diagram of Naton robot-assisted UKAa. Preoperative planning of prosthesis position, size, angle, and joint space; b. Prosthesis position, size, angle, and joint space after adjustment during operation; c. Final planning before osteotomy
2 結果
本組5例(5膝)術中因機械臂故障、軟件障礙、截骨量明顯偏倚或參考架松動等原因,改為傳統UKA,排除最終分析;余95例(105膝)順利完成機器人輔助UKA,均無相關并發癥出現。術中股骨側假體型號與術前規劃一致101膝(96.19%)、脛骨側一致100膝(95.24%),股骨及脛骨側均一致97膝(92.38%);其中單獨股骨側假體型號不一致3膝(2.86%),單獨脛骨側不一致4膝(3.81%),股骨側與脛骨側型號均不一致1膝(0.95%)。術前規劃與術中使用型號不一致假體的膝關節,其屈、伸間隙均<0.5 mm 3膝,屈曲間隙<0.5 mm、伸直間隙>2.0 mm 3膝,屈曲間隙>2.0 mm、伸直間隙<0.5 mm 2膝(表1)。
3 討論
目前,UKA是治療膝關節單間室骨關節炎的一種常用手術技術,機器人輔助UKA可以提高手術精度,最大程度保護韌帶軟組織,調節屈伸間隙平衡[5-6]。但是,選擇的脛骨假體過大或過小均會導致術后相應并發癥發生。研究表明脛骨假體內側懸垂<2 mm時,術后膝關節內側副韌帶張力與無懸垂患者無明顯差異;<3 mm時患者隨訪時膝關節學會評分系統(KSS)評分顯著高于正常患者,術后會出現不明原因內側疼痛及關節彈響,也容易出現墊片脫位和假體無菌性松動,并導致最終的膝關節翻修[7-8]。所以,UKA翻修率和假體懸垂程度存在一定相關關系,若脛骨假體內側懸垂>3 mm,則易出現墊片脫位及無菌性松動并最終導致翻修;而脛骨假體過小或者覆蓋平臺不足,可能導致術后脛骨假體松動、平臺骨折及假體下沉風險增加[9-10]。其次,股骨假體過小不能完全覆蓋股骨后髁,墊片容易脫出;而股骨假體過大會出現假體后緣超過股骨髁后緣,應力集中導致遠期松動[11]。
骨科手術機器人系統的應用為UKA提供了更高精確性,在UKA術中假體型號與截骨后的患膝是否匹配很大程度上影響假體生存率、術后功能鍛煉及并發癥的發生。影響假體型號的原因很多,比如截骨量、假體植入角度以及關節間隙松緊度,都可能導致假體大小改變。分析本研究中出現術前規劃假體型號與術中使用型號不一致的原因,主要是為了獲得良好關節間隙松緊度,內側骨關節炎患者一般都會出現內側關節間隙小、軟組織張力緊張,為了達到良好關節間隙松緊度,術中會調整截骨量、假體植入位置及角度,以期術后獲得更好的膝關節功能。
本研究術后實際使用假體型號與術前規劃不一致的原因,我們考慮可能有以下幾點:第一,當屈、伸間隙均小時會增加脛骨或股骨截骨量,可能導致脛骨、股骨假體型號變小。第二,當屈、伸間隙均大時會減少脛骨或股骨截骨量,可能導致脛骨、股骨假體型號變大。第三,當屈曲間隙小、伸直間隙大時,會增加脛骨后傾或前移股骨假體,前移股骨假體可以增加股骨后髁截骨量,增加屈曲間隙,但可能會導致假體部分懸垂或股骨假體不貼合,如移動假體位置或內、外旋股骨假體后不能改善,需要更換小一號假體[12]。第四,當伸直間隙小、屈曲間隙大時,會減少脛骨后傾或后移股骨假體,以及屈曲股骨假體,后移股骨假體可以減少股骨后髁截骨量,減小屈曲間隙,但可能導致股骨假體前方和股骨髁前方剩余軟骨間有臺階,此時屈曲股骨假體,可以使股骨假體前方和股骨剩余軟骨更貼合[13]。
除了上述為達到屈、伸間隙平衡而出現的假體型號改變以外,也有特殊情況造成的假體型號改變。本研究中1例高齡女性患者,術中發現前交叉韌帶幾乎全部斷裂,綜合考慮患者年齡、身體狀況及術后功能康復情況,繼續實施膝關節內側單髁置換,將術前規劃的7° 后傾調整為3°,導致屈曲間隙變小,前移股骨假體以增加屈曲間隙,導致股骨假體懸垂不能貼合股骨,最后改用小一號股骨假體。
此外,本研究中5例患者因機械臂故障、軟件障礙、截骨量明顯偏倚或參考架松動等原因改為傳統手術,出現此類技術問題的原因考慮有如下幾點:第一,機械臂是一種精密機械裝置,但關節靈活度仍不及人的關節,過伸、過屈患肢體位會導致機械臂接近過程中出現奇異位,造成機械臂卡死[14]。第二,Naton機器人術前規劃需要基于CT三維重建,要求行下肢三段或全長CT 掃描,確保膝關節影像層厚<1 mm。如果CT掃描不準確或掃描過程中患者移動患肢,造成術前規劃采集解剖標志不準確,從而與術中采集解剖標志不匹配,最終導致軟件故障[15]。第三,術中行關節面配準時,如果術者配準不準確就會出現截骨量明顯增多或減少。第四,固定參考架時固定針未穿透雙皮質,參考架固定不牢固,術中活動患肢或觸碰參考架即可導致其松動[16]。
綜上述, Naton機器人系統術前規劃假體型號和術中實際假體型號一致性高。但是本研究也有一定局限性,首先是一項回顧性研究,其次僅使用了一種機器人單髁系統,無法代表所有機器人單髁系統,因此本研究結論有待進一步明確。
利益沖突 在課題研究和文章撰寫過程中不存在利益沖突;經費支持沒有影響文章觀點和對研究數據客觀結果的統計分析及其報道
倫理聲明 研究方案經中國人民解放軍總醫院第四醫學中心臨床試驗醫學倫理委員會批準(2024KY043-KS001)
作者貢獻聲明 陳龍飛:研究設計、數據收集整理、文章撰寫;宋岳、谷旺、南少奎、孟鄭鑫:數據收集、統計分析;李海峰:對文章內容作批評性審閱
膝關節骨關節炎多發生于中老年人群,為膝關節軟骨磨損、骨質增生引起的慢性關節疾病,造成患者膝關節畸形及長期疼痛,嚴重影響日常生活[1]。膝關節骨關節炎可累及任何膝關節間室,常見內側間室病變。與人工全膝關節置換術相比,人工單髁置換術(unicompartmental knee arthroplasty,UKA)具有組織損傷小、出血量少、骨量保存較多、并發癥少,以及患者術后恢復快、膝關節感覺更接近術前等優點[2]。然而,UKA因切口小、截骨量少、對恢復膝關節術后韌帶張力要求高,其置換假體型號選擇難度與人工全膝關節置換術相比更高。適配的假體對于避免術后關節疼痛、彈響及早期無菌性松動至關重要,而假體不適配會導致假體覆蓋不足、應力性骨折或假體懸垂、激惹周圍韌帶軟組織,可能引起襯墊磨損或假體無菌性松動[3]。
近年來,骨科手術機器人輔助技術在臨床獲得廣泛應用,并顯示出明顯優勢。研究表明,手術機器人輔助UKA可以提高截骨準確性,最大限度避免韌帶軟組織損傷[4]。但是目前國內外關于機器人輔助UKA對于假體型號選擇的準確性鮮有報道。北京納通科技集團設計的Naton機器人系統配備單髁及全膝關節假體系統,可以進行UKA和人工全膝關節置換術;術前根據患者CT進行假體個性化三維規劃,術中在機器人系統輔助下,通過導航模塊實時監測,術者可以精準截骨,并且根據需要實時調整截骨量、假體位置、角度和韌帶軟組織平衡,其創傷小,可盡量保留正常軟骨及韌帶軟組織,有利于患者術后康復鍛煉。本研究通過比較UKA術中實際使用假體型號與機器人輔助術前計劃假體型號的差異,明確Naton機器人輔助UKA術前假體型號選擇的準確性。報告如下。
1 臨床資料
1.1 一般資料
患者納入標準:① 單純膝關節內側間室骨關節炎/骨壞死;② 膝關節內翻畸形<15°,屈曲攣縮畸形<15°;③ 膝關節內、外側副韌帶完整連續;④ 接受Naton機器人輔助UKA治療;⑤ 年齡50~80歲;⑥ 身體質量指數<35 kg/m2;⑦ 無患側膝關節周圍感染及全身感染;⑧ 既往患側膝關節無手術史。
排除標準:① 存在活動性、局部或全身感染;② 類風濕性關節炎等炎性關節炎;③ 膝關節半脫位距離>0.5 cm;④ 膝關節韌帶出現廣泛性松弛。
2023年6月—2024年7月,中國人民解放軍總醫院第四醫學中心骨科醫學部收治患者中,100例(110膝)符合選擇標準納入研究。其中,男37例(40膝),女63例(70膝);年齡59~71歲,平均65.4歲。左側47膝,右側63膝。身體質量指數 22.2~28.6 kg/m2,平均25.4 kg/m2。病程1~8年,平均3.4年。
1.2 術前規劃方法
患者術前需行下肢三段或全長(包含踝關節和股骨頭中心)CT 掃描,膝關節影像層厚<1 mm且三段必須同一次采集(避免多次采集)。將掃描數據輸入Naton機器人系統,進行影像分割與建模,然后在三維模型上確定髖關節中心、內上髁、外上髁、膝關節中心、后交叉韌帶止點中點、脛骨結節、內踝、外踝等骨性標志,依據以上骨性標志確定下肢力線、股骨屈伸旋轉軸線、脛骨內外旋轉軸線,計算術中股骨及脛骨截骨量、假體位置及型號,模擬假體的最優匹配。
1.3 手術方法
本組手術由同一組醫師完成,選擇LINK sled膝關節單髁假體(LINK公司,德國)。患者于全身麻醉(84例)或椎管內麻醉(16例)下,患肢常規消毒并鋪放無菌巾單后,護皮膜覆蓋患肢皮膚,助手同步行機械臂注冊,在股骨遠端和脛骨中段各固定2枚骨針,安裝脛骨和股骨示蹤器。取患膝髕旁內側切口,起于髕骨上方、止于脛骨結節上內1 cm,切開皮膚、皮下組織,自股四頭肌向遠端沿髕骨內側達脛骨結節內上方切開關節囊,在切口內安裝股骨及脛骨檢查釘,活動膝關節探查見其中109膝內側間室關節軟骨嚴重破壞廣泛剝脫,骨贅增生,前交叉韌帶完整,外側間室軟骨正常,髕股關節軟骨良好,符合前內側間室骨關節炎診斷,適合行UKA;另1膝高齡女性患者前交叉韌帶斷裂,但綜合患者基礎條件以及選擇固定平臺單髁假體,最終仍確定UKA。然后,采集術中標志點,搖腿確認髖關節中心點,依次完成股骨內外側髁、內外踝尖端等解剖標志點的注冊,再根據導航工作臺指示依次完成關節骨面的配準,去除骨贅及內側半月板,在術前規劃假體型號模擬下,屈伸膝關節檢查內側間室松緊度及軟組織張力,獲得關節間隙數值并形成柱狀圖(圖1a)。根據軟件顯示的膝關節屈曲角度、內外翻、內外旋數值以及關節間隙數值,判斷上述指標是否達要求,并對應微調股骨及脛骨平臺的截骨量、假體角度及位置(圖1b),以保證獲得合適的下肢力線以及關節間隙松緊度,此時如術前規劃假體型號與微調后的股骨及脛骨平臺不匹配,需進行更換(圖1c)。驗證脛骨檢查釘及擺據位置,行脛骨水平面截骨,然后將擺據更換成6.5 mm磨鉆行脛骨矢狀面截骨和股骨遠端截骨,再更換成5.5 mm磨鉆行股骨假體安裝柱打孔,更換成3.0 mm磨鉆行脛骨假體龍骨開槽。沖洗切口,安裝假體,骨水泥硬化后逐層關閉切口并包扎,均不放置引流管。記錄術中實際使用假體型號,與術前規劃假體型號進行比較;同時記錄不一致假體中對應的膝關節屈、伸間隙(<0.5 mm、>2.0 mm)情況。
圖1
Naton機器人輔助UKA示意圖
a. 術前規劃的假體位置、大小、角度及關節間隙;b. 術中微調后的假體位置、大小、角度及關節間隙;c. 截骨前的最終規劃
Figure1. Schematic diagram of Naton robot-assisted UKAa. Preoperative planning of prosthesis position, size, angle, and joint space; b. Prosthesis position, size, angle, and joint space after adjustment during operation; c. Final planning before osteotomy
2 結果
本組5例(5膝)術中因機械臂故障、軟件障礙、截骨量明顯偏倚或參考架松動等原因,改為傳統UKA,排除最終分析;余95例(105膝)順利完成機器人輔助UKA,均無相關并發癥出現。術中股骨側假體型號與術前規劃一致101膝(96.19%)、脛骨側一致100膝(95.24%),股骨及脛骨側均一致97膝(92.38%);其中單獨股骨側假體型號不一致3膝(2.86%),單獨脛骨側不一致4膝(3.81%),股骨側與脛骨側型號均不一致1膝(0.95%)。術前規劃與術中使用型號不一致假體的膝關節,其屈、伸間隙均<0.5 mm 3膝,屈曲間隙<0.5 mm、伸直間隙>2.0 mm 3膝,屈曲間隙>2.0 mm、伸直間隙<0.5 mm 2膝(表1)。
3 討論
目前,UKA是治療膝關節單間室骨關節炎的一種常用手術技術,機器人輔助UKA可以提高手術精度,最大程度保護韌帶軟組織,調節屈伸間隙平衡[5-6]。但是,選擇的脛骨假體過大或過小均會導致術后相應并發癥發生。研究表明脛骨假體內側懸垂<2 mm時,術后膝關節內側副韌帶張力與無懸垂患者無明顯差異;<3 mm時患者隨訪時膝關節學會評分系統(KSS)評分顯著高于正常患者,術后會出現不明原因內側疼痛及關節彈響,也容易出現墊片脫位和假體無菌性松動,并導致最終的膝關節翻修[7-8]。所以,UKA翻修率和假體懸垂程度存在一定相關關系,若脛骨假體內側懸垂>3 mm,則易出現墊片脫位及無菌性松動并最終導致翻修;而脛骨假體過小或者覆蓋平臺不足,可能導致術后脛骨假體松動、平臺骨折及假體下沉風險增加[9-10]。其次,股骨假體過小不能完全覆蓋股骨后髁,墊片容易脫出;而股骨假體過大會出現假體后緣超過股骨髁后緣,應力集中導致遠期松動[11]。
骨科手術機器人系統的應用為UKA提供了更高精確性,在UKA術中假體型號與截骨后的患膝是否匹配很大程度上影響假體生存率、術后功能鍛煉及并發癥的發生。影響假體型號的原因很多,比如截骨量、假體植入角度以及關節間隙松緊度,都可能導致假體大小改變。分析本研究中出現術前規劃假體型號與術中使用型號不一致的原因,主要是為了獲得良好關節間隙松緊度,內側骨關節炎患者一般都會出現內側關節間隙小、軟組織張力緊張,為了達到良好關節間隙松緊度,術中會調整截骨量、假體植入位置及角度,以期術后獲得更好的膝關節功能。
本研究術后實際使用假體型號與術前規劃不一致的原因,我們考慮可能有以下幾點:第一,當屈、伸間隙均小時會增加脛骨或股骨截骨量,可能導致脛骨、股骨假體型號變小。第二,當屈、伸間隙均大時會減少脛骨或股骨截骨量,可能導致脛骨、股骨假體型號變大。第三,當屈曲間隙小、伸直間隙大時,會增加脛骨后傾或前移股骨假體,前移股骨假體可以增加股骨后髁截骨量,增加屈曲間隙,但可能會導致假體部分懸垂或股骨假體不貼合,如移動假體位置或內、外旋股骨假體后不能改善,需要更換小一號假體[12]。第四,當伸直間隙小、屈曲間隙大時,會減少脛骨后傾或后移股骨假體,以及屈曲股骨假體,后移股骨假體可以減少股骨后髁截骨量,減小屈曲間隙,但可能導致股骨假體前方和股骨髁前方剩余軟骨間有臺階,此時屈曲股骨假體,可以使股骨假體前方和股骨剩余軟骨更貼合[13]。
除了上述為達到屈、伸間隙平衡而出現的假體型號改變以外,也有特殊情況造成的假體型號改變。本研究中1例高齡女性患者,術中發現前交叉韌帶幾乎全部斷裂,綜合考慮患者年齡、身體狀況及術后功能康復情況,繼續實施膝關節內側單髁置換,將術前規劃的7° 后傾調整為3°,導致屈曲間隙變小,前移股骨假體以增加屈曲間隙,導致股骨假體懸垂不能貼合股骨,最后改用小一號股骨假體。
此外,本研究中5例患者因機械臂故障、軟件障礙、截骨量明顯偏倚或參考架松動等原因改為傳統手術,出現此類技術問題的原因考慮有如下幾點:第一,機械臂是一種精密機械裝置,但關節靈活度仍不及人的關節,過伸、過屈患肢體位會導致機械臂接近過程中出現奇異位,造成機械臂卡死[14]。第二,Naton機器人術前規劃需要基于CT三維重建,要求行下肢三段或全長CT 掃描,確保膝關節影像層厚<1 mm。如果CT掃描不準確或掃描過程中患者移動患肢,造成術前規劃采集解剖標志不準確,從而與術中采集解剖標志不匹配,最終導致軟件故障[15]。第三,術中行關節面配準時,如果術者配準不準確就會出現截骨量明顯增多或減少。第四,固定參考架時固定針未穿透雙皮質,參考架固定不牢固,術中活動患肢或觸碰參考架即可導致其松動[16]。
綜上述, Naton機器人系統術前規劃假體型號和術中實際假體型號一致性高。但是本研究也有一定局限性,首先是一項回顧性研究,其次僅使用了一種機器人單髁系統,無法代表所有機器人單髁系統,因此本研究結論有待進一步明確。
利益沖突 在課題研究和文章撰寫過程中不存在利益沖突;經費支持沒有影響文章觀點和對研究數據客觀結果的統計分析及其報道
倫理聲明 研究方案經中國人民解放軍總醫院第四醫學中心臨床試驗醫學倫理委員會批準(2024KY043-KS001)
作者貢獻聲明 陳龍飛:研究設計、數據收集整理、文章撰寫;宋岳、谷旺、南少奎、孟鄭鑫:數據收集、統計分析;李海峰:對文章內容作批評性審閱