引用本文: 袁偉, 劉欣春, 叢琳, 朱海濤, 崔璀, 裴磊, 王翰, 朱悅. 機器人與傳統透視輔助內固定手術治療強直性脊柱炎胸腰椎骨折的回顧性研究. 中國修復重建外科雜志, 2024, 38(8): 929-934. doi: 10.7507/1002-1892.202405103 復制
版權信息: ?四川大學華西醫院華西期刊社《中國修復重建外科雜志》版權所有,未經授權不得轉載、改編
強直性脊柱炎(ankylosing spondylitis,AS)是一種進行性炎性疾病,主要累及脊柱和骶髂關節,影像特征是椎體、椎間盤和關節突關節及韌帶骨化,在形態學上也被稱為“竹節樣脊柱”[1]。AS可導致脊柱僵硬、畸形,常合并骨質疏松,此類患者在輕微創傷甚至無創傷情況下即可發生椎體骨折。AS胸腰椎骨折大多累及三柱,為不穩定性骨折,常伴有神經損傷,手術治療臨床效果優于非手術治療[2]。此類骨折手術入路主要包括后路、前路和前后路,其中后路長節段固定為首選方案[3]。由于AS疾病本身的特點,開放手術常伴隨著較大失血量,術后感染風險較高[4]。近年來,微創手術內固定聯合或不聯合減壓治療AS胸腰椎骨折取得了較好療效,減少了術中創傷及并發癥發生風險[5]。但AS椎體解剖結構異常,與正常椎體相比椎弓根螺釘植入難度較大,加之椎體骨質疏松,植釘偏差后再調整容易出現內固定物松動,研究顯示AS椎體骨折中螺釘相關并發癥發生率高達17.6%[6]。
手術機器人已在脊柱外科廣泛應用,研究表明與傳統透視徒手植釘相比,機器人輔助可以顯著提高椎弓根螺釘植入的準確性[7]。但既往機器人輔助脊柱手術均為開放或者一釘一切口的經皮微創植釘方式[8-9],雖然提高了植釘精準性,但仍存在開放手術創傷大、微創手術多切口等問題。基于此,我們改良了機器人輔助微創手術方案,并回顧性比較機器人輔助微創與傳統透視輔助開放后路內固定手術治療AS胸腰椎骨折的療效。報告如下。
1 臨床資料
1.1 一般資料
患者納入標準: ① 按照AS紐約修訂標準[10]診斷為AS且合并胸腰椎骨折;② 采用天璣骨科機器人(北京天智航醫療科技股份有限公司)或透視輔助后路內固定手術,伴或不伴減壓。排除標準:① 脊柱穩定骨折;② 合并椎體腫瘤、椎體感染或其他病理性骨病;③ 身體狀態差,不能耐受手術。
2016年12月—2023年12月,共21例患者符合選擇標準納入研究。其中,10例接受機器人輔助微創后路內固定手術(機器人組),11例接受傳統透視輔助開放后路內固定手術(透視組)。兩組患者性別、年齡、骨折椎體節段分布、骨折AO分型、受傷至手術時間以及術前疼痛視覺模擬評分(VAS)、美國脊髓損傷學會(ASIA)分級等基線資料比較,差異均無統計學意義(P>0.05),具有可比性。見表1。
1.2 手術方法
兩組手術均由同一組術者完成。所有患者全身麻醉后取俯臥位。
透視組:C臂X線機透視確定病變節段,在病變椎體正中作縱切口,沿棘突和椎板剝離椎旁肌,暴露椎板和小關節。透視下,徒手將椎弓根螺釘(UPASS系統,山東威高骨科材料股份有限公司)經雙側椎弓根植入骨折椎體及上、下相鄰2~3個節段。本組9例合并神經功能障礙者行椎板切除減壓,后外側行自體碎骨植骨融合。切口放置引流管后縫合關閉。
機器人組:首先應用C臂或O臂X線機掃描獲取三維圖像,傳輸至機器人系統主控臺進行植釘路徑規劃。機械臂按照規劃路徑運行至相應位置后,采用經皮膚表面定位技術將克氏針鉆入椎體,即套筒抵至皮膚表面后不切開皮膚,直接將導針刺入皮膚并鉆入椎體[11],皮膚表面保留5 mm克氏針殘端。沿中線切開皮膚至筋膜層,牽開筋膜顯露克氏針殘余部分。通過克氏針經肌間植入空心椎弓根螺釘(UPASSⅡ系統,山東威高骨科材料股份有限公司),固定節段為骨折椎體及上、下相鄰2~3個節段。本組8例合并神經功能障礙者行局部剝離后椎板切除減壓,取自體碎骨行減壓節段的后外側植骨。
1.3 療效評價指標
記錄兩組手術時間、術中出血量、輻射暴露時間、輻射劑量、住院時間、并發癥發生情況。基于術后1周內CT,參照Gertzbein-Robbins標準[12]評價螺釘植入精準度,共分為5個等級:A級,螺釘完全在椎弓根內;B級,超出椎弓根<2 mm;C級,超出椎弓根2~4 mm;D級,超出椎弓根4~6 mm;E級,超出椎弓根≥6 mm。A、B級螺釘位置被認為臨床可接受,其他級別螺釘位置為不可接受。隨訪期間采用VAS評分和ASIA分級評價疼痛及神經功能狀態。
1.4 統計學方法
采用SPSS20.0統計軟件進行分析。計量資料經Shapiro-Wilk檢驗均符合正態分布,以均數±標準差表示,組間比較采用獨立樣本t檢驗;兩組多時間點比較采用重復測量方差分析,若不滿足球形檢驗,采用Greenhouse-Geisser法進行校正,同一組別不同時間點間比較采用 Bonferroni 法。計數資料組間比較采用四格表卡方檢驗及列聯表卡方檢驗。等級資料組間比較采用Wilcoxon秩和檢驗,兩組多時間點比較采用廣義估計方程。檢驗水準α=0.05。
2 結果
兩組手術均順利完成,手術時間差異無統計學意義(P>0.05)。與透視組相比,機器人組術中出血量及住院時間減少,輻射暴露時間及輻射劑量增加,差異均有統計學意義(P<0.05)。兩組共植入249枚椎弓根螺釘,其中機器人組118枚、透視組131枚。參照Gertzbein-Robbins標準,機器人組臨床可接受螺釘占比明顯高于透視組,差異有統計學意義(P<0.05)。見表2。
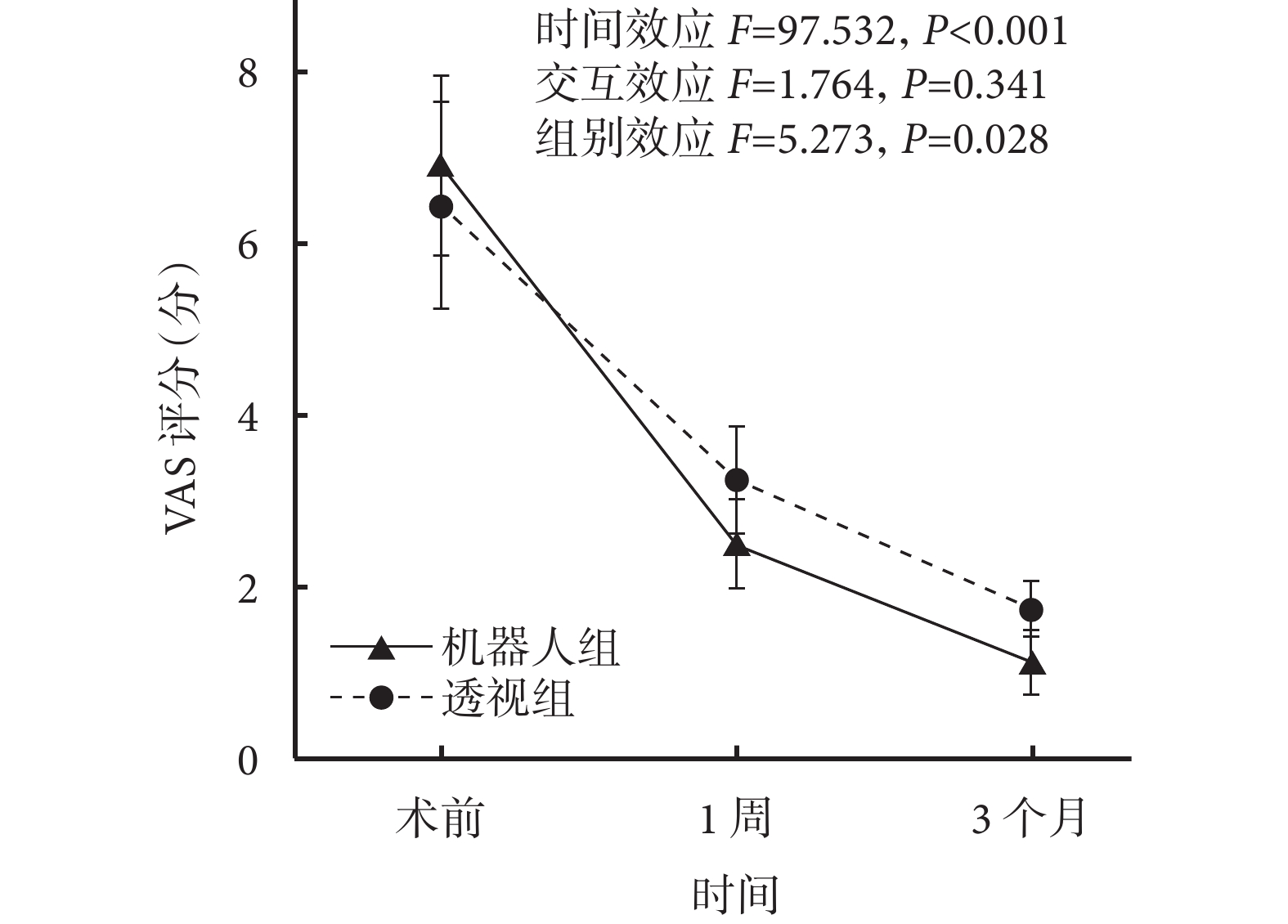
兩組患者術后均獲隨訪,隨訪時間3~12個月,平均6.8個月。兩組術后1周及3個月時VAS評分均較術前下降,差異有統計學意義(P<0.05);術后1周及3個月時機器人組評分均低于透視組,差異有統計學意義(P<0.05)。見圖1。術后機器人組4例(40.0%)、透視組5例(45.5%)術前神經功能障礙患者ASIA分級改善,但術前A級患者神經功能均無改善。兩組術后1周及3個月時ASIA分級與術前比較,差異無統計學意義(P>0.05);術后兩時間點兩組間差異亦無統計學意義(P>0.05)。見表2、圖2。
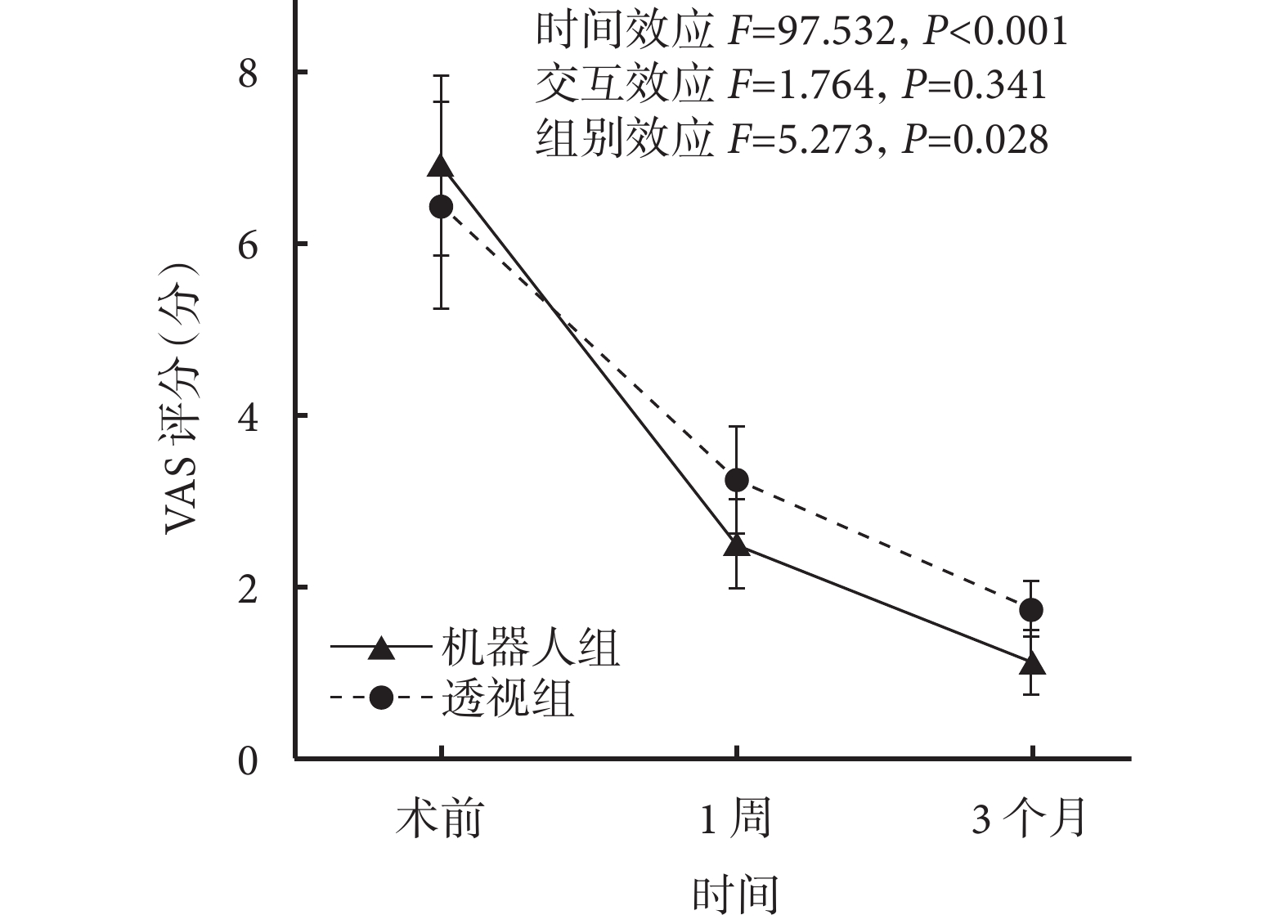 圖1
兩組患者VAS評分變化趨勢
Figure1.
Change trends of VAS score in the two groups
圖1
兩組患者VAS評分變化趨勢
Figure1.
Change trends of VAS score in the two groups
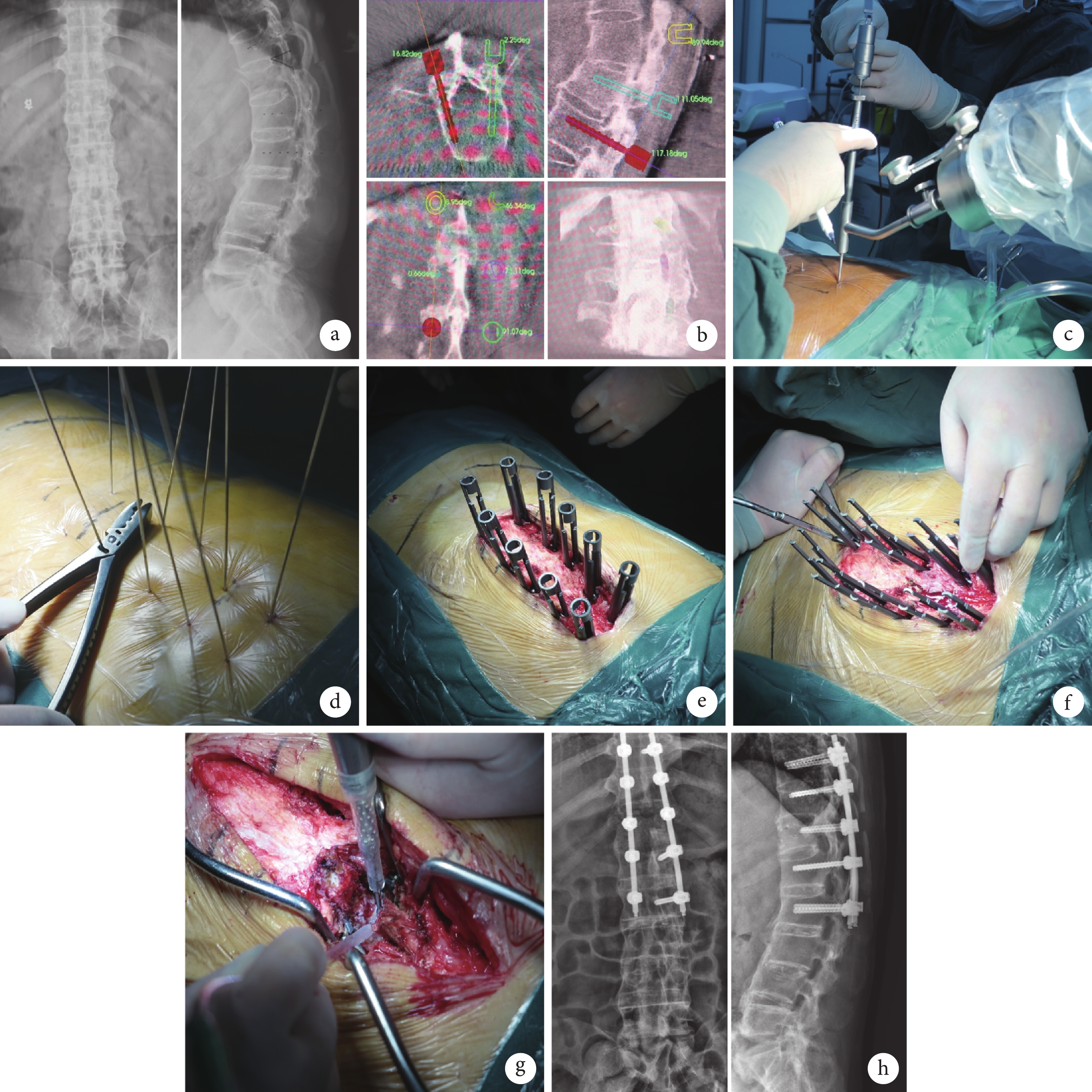
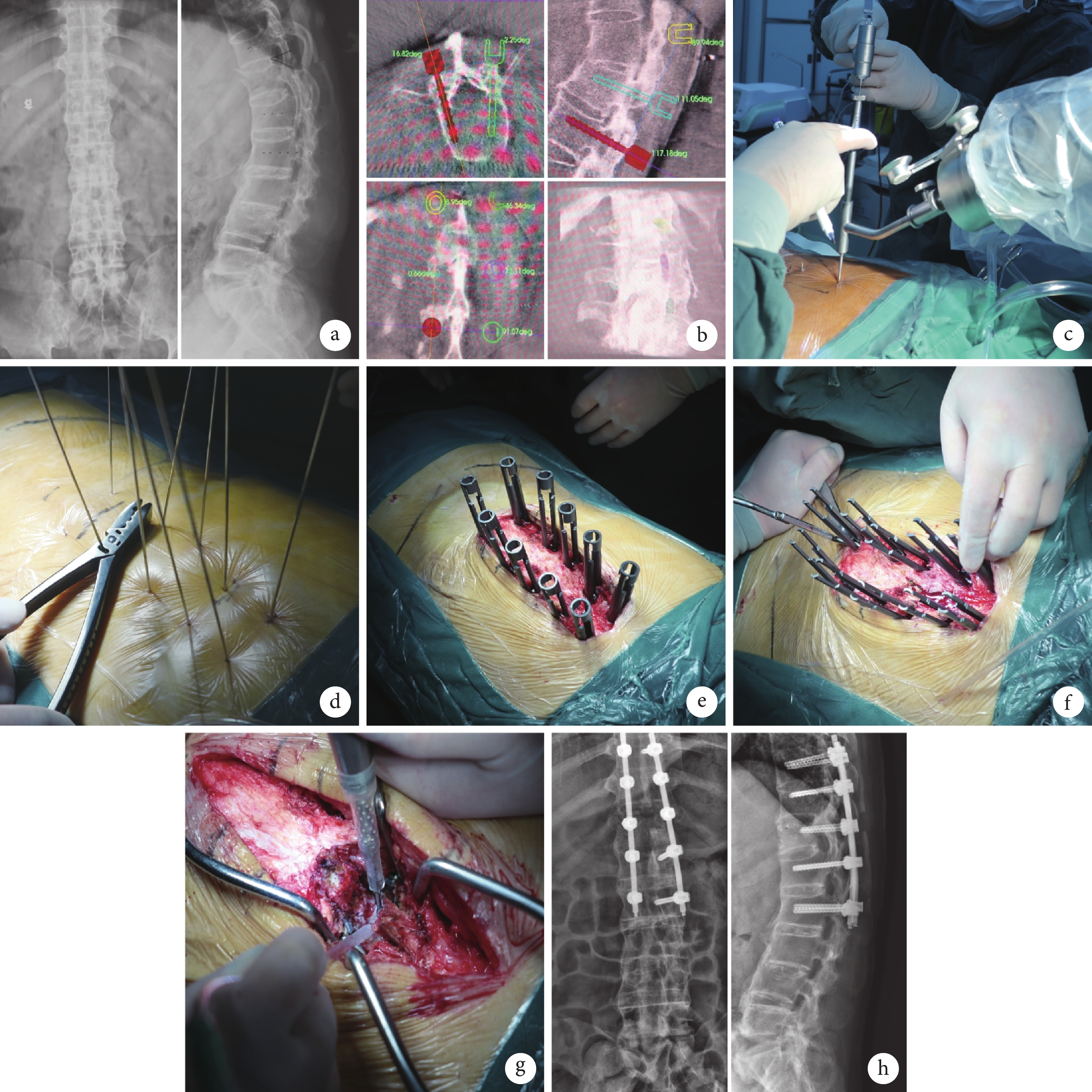 圖2
機器人組患者,男,57歲,AS合并T12骨折(AO分型B型,ASIA分級A級)
圖2
機器人組患者,男,57歲,AS合并T12骨折(AO分型B型,ASIA分級A級)
a. 術前正側位X線片; b. 術中規劃螺釘植入路徑; c. 在機械臂引導下經皮置入克氏針; d. 在皮外剪斷克氏針; e. 作正中切口,通過克氏針經肌間植入空心椎弓根螺釘; f. 經肌間安裝鈦棒; g. 局部有限剝離椎板切除減壓; h. 術后3個月正側位X線片
Figure2. A 57-year-old male patient with AS and T12 fracture (AO type B, ASIA grading A) in the RA groupa. Preoperative anteroposterior and lateral X-ray films; b. Intraoperative planning of screw placement path; c. Percutaneous insertion of Kirschner wire under the guidance of a robotic arm; d. Cut Kirschner wire outside the skin; e. A median incision was made, and hollow pedicle screws were implanted through Kirschner wire; f. Intramuscular installation of titanium rods; g. Local laminectomy and decompression; h. Anteroposterior and lateral X-ray films at 3 months after surgery
并發癥方面,透視組1例發生手術部位深部感染,經徹底清創、負壓吸引縫合后切口愈合良好;1例發生下肢深靜脈血栓形成,給予抗凝治療2個月。機器人組無并發癥發生。兩組并發癥發生率比較差異無統計學意義(P>0.05)。見表2。
3 討論
AS胸腰椎骨折傳統后路開放手術需要廣泛剝離變性椎旁肌,手術創傷大、出血多、發生感染風險較高,可進一步加重肌萎縮,導致術后腰背部無力及慢性腰背痛等[13]。與傳統開放手術相比,微創手術治療AS胸腰椎骨折不僅能取得相似療效,還具有對椎旁肌干擾小、手術創傷小、失血少、感染風險低的優勢[14]。AS胸腰椎骨折的常規微創手術方法是透視下經皮椎弓根螺釘固定,即透視經皮經椎弓根置入椎體內穿刺針并插入導針,沿導針上、下切開皮膚1.5 cm左右,擴張、攻絲,并植入椎弓根螺釘,經皮穿棒固定。然而,由于小切口皮膚及深筋膜的阻擋,長節段經皮螺釘固定的鈦棒安放相對困難[15]。在合并椎體脫位情況下,經皮螺釘植入及鈦棒安裝更困難,可能增加手術時間和術中輻射暴露。此外,這種長節段經皮手術的一釘一切口會影響患者背部外觀。椎弓根螺釘的精準植入是脊柱手術重要環節,位置不良的椎弓根螺釘可導致嚴重神經血管損傷。傳統開放或經皮微創均為透視輔助下的徒手植釘,與正常脊柱相比,AS患者脊柱關節突融合、畸形,解剖標志不清進一步增加了椎弓根螺釘植入難度[16],而骨科機器人的應用顯著提高了植釘精準度[17]。但機器人輔助AS胸腰椎骨折開放手術仍需廣泛剝離,顯露植釘解剖標志點[18],無法避免手術創傷大的問題;同時既往機器人輔助經皮腰椎植釘研究表明,小切口套筒穿過筋膜、肌肉植釘時,肌肉纖維束及其他軟組織壓力會使植釘套筒偏離規劃進釘點,影響植釘準確性[19]。
基于以上問題,我們對機器人輔助手術步驟進行了改良:① 機器人輔助下經皮膚表面定位,套筒抵至皮膚表面后不切開皮膚,而是將導針直接刺入皮膚抵至骨面并鉆入椎弓根;② 驗證導針位置滿意后剪斷導針,正中切開皮膚至筋膜層,并將導針殘端從筋膜層翻出;③ 將空心椎弓根螺釘沿導針經肌間植入椎體,無需剝離椎旁肌;④ 若需減壓,可行責任節段局部剝離后椎板減壓。該方法皮外穿針利用克氏針針頭鋒利、直徑小的特點,在肌間走行阻力小,降低了針尖偏移可能性,保證了置針精準性。此外,該方法僅需一個常規正中切口,不是兩排多個小切口,改善了患者背部美觀度,也方便了長節段鈦棒的安放。經機器人組的臨床應用,我們認為該改良手術流程實現了AS胸腰椎骨折治療的機器人精準與微創相結合。同時,我們將該方法用于青少年特發性脊柱側彎的治療中,也發揮了機器人手術微創化與植釘精準性的優勢[11]。
本研究結果顯示,機器人組術中出血量明顯少于透視組,說明機器人改良微創方案可以減少患者術中失血。兩組手術時間無明顯差異,分析與術中機器人準備、術中三維掃描、植釘規劃等需要額外時間有關。機器人組無并發癥發生,透視組發生深部切口感染及下肢深靜脈血栓形成各1例,分析可能與開放手術時間長、術后臥床時間長有關。Kohler等[20]發現AS胸腰椎骨折微創手術組無并發癥發生,而開放手術組術后感染發生率為7%,分析感染與AS肌肉炎性改變及手術損傷后肌萎縮相關。
在植釘精準度方面,本研究結果顯示機器人輔助微創植釘準確率顯著高于傳統開放透視徒手植釘,其中兩組臨床可接受的螺釘位置(A、B級)分別為95.8%和87.8%,與既往研究報道機器人輔助椎弓根植釘準確性結果相似[7],進一步證明了本研究采用的機器人輔助經皮膚表面定位穿針能夠維持機器人植釘手術的高準確性。對于機器人手術中的誤植螺釘(C、D、E級),可能是由于針頭打滑造成[21],可以選擇入針點為非骨表面斜坡處或者使用高速鉆來改善滑動現象。
目前,關于AS胸腰椎骨折的微創手術與開放手術輻射暴露研究結果尚不一致。Kohler等[20]研究發現微創手術和開放手術治療AS胸腰椎骨折的術中透視時間無明顯差異,而Kai等[22]發現微創手術需要透視時間更長。在機器人手術中的輻射暴露程度可能與機器人類型相關。我們既往報道天璣骨科機器人應用于脊柱手術雖然可以減少術中輻射暴露,但與透視技術相比,會增加患者輻射暴露[23-24]。本研究中,我們發現機器人組患者接受輻射暴露時間明顯長于透視組,總輻射劑量也明顯高于透視組。考慮到醫生在手術室進行C臂或O臂三維掃描或透視時可以遠離輻射區域,我們沒有對醫生的輻射暴露進行評估。
在臨床療效上,我們發現術后1周及3個月時機器人組VAS評分明顯低于透視組,機器人組對椎旁肌損傷更小,可能更有利于患者術后疼痛緩解。不完全神經功能障礙患者均有部分改善,而完全神經功能缺損患者神經功能無改善,兩組也無明顯差異。本研究中機器人組可行骨折脫位節段局部椎板減壓,有助于神經功能的恢復,效果等同于開放手術。
本研究仍存在不足:本研究為一項單中心回顧性研究,因AS胸腰椎骨折病種限制,兩組研究樣本量也較小,影響統計結果;兩組患者隨訪時間短,術后神經功能改善效果有待進一步觀察。
綜上述,機器人微創手術和傳統透視開放手術在緩解疼痛、改善神經功能方面均能取得良好效果。與傳統透視開放手術相比,機器人微創手術在減少術中出血量、縮短住院時間等方面更具優勢,且顯著提高了椎弓根螺釘植入的準確度。
利益沖突 在課題研究和文章撰寫過程中不存在利益沖突
機構倫理 研究方案經中國醫科大學附屬第一醫院醫學科學研究倫理委員會批準(2018-254-2)
作者貢獻聲明 袁偉:研究設計及實施、起草文章;劉欣春、叢琳、朱海濤:研究實施、數據收集;崔璀、裴磊、王翰:參與數據整理與分析;朱悅:研究設計、文章審閱與修改
強直性脊柱炎(ankylosing spondylitis,AS)是一種進行性炎性疾病,主要累及脊柱和骶髂關節,影像特征是椎體、椎間盤和關節突關節及韌帶骨化,在形態學上也被稱為“竹節樣脊柱”[1]。AS可導致脊柱僵硬、畸形,常合并骨質疏松,此類患者在輕微創傷甚至無創傷情況下即可發生椎體骨折。AS胸腰椎骨折大多累及三柱,為不穩定性骨折,常伴有神經損傷,手術治療臨床效果優于非手術治療[2]。此類骨折手術入路主要包括后路、前路和前后路,其中后路長節段固定為首選方案[3]。由于AS疾病本身的特點,開放手術常伴隨著較大失血量,術后感染風險較高[4]。近年來,微創手術內固定聯合或不聯合減壓治療AS胸腰椎骨折取得了較好療效,減少了術中創傷及并發癥發生風險[5]。但AS椎體解剖結構異常,與正常椎體相比椎弓根螺釘植入難度較大,加之椎體骨質疏松,植釘偏差后再調整容易出現內固定物松動,研究顯示AS椎體骨折中螺釘相關并發癥發生率高達17.6%[6]。
手術機器人已在脊柱外科廣泛應用,研究表明與傳統透視徒手植釘相比,機器人輔助可以顯著提高椎弓根螺釘植入的準確性[7]。但既往機器人輔助脊柱手術均為開放或者一釘一切口的經皮微創植釘方式[8-9],雖然提高了植釘精準性,但仍存在開放手術創傷大、微創手術多切口等問題。基于此,我們改良了機器人輔助微創手術方案,并回顧性比較機器人輔助微創與傳統透視輔助開放后路內固定手術治療AS胸腰椎骨折的療效。報告如下。
1 臨床資料
1.1 一般資料
患者納入標準: ① 按照AS紐約修訂標準[10]診斷為AS且合并胸腰椎骨折;② 采用天璣骨科機器人(北京天智航醫療科技股份有限公司)或透視輔助后路內固定手術,伴或不伴減壓。排除標準:① 脊柱穩定骨折;② 合并椎體腫瘤、椎體感染或其他病理性骨病;③ 身體狀態差,不能耐受手術。
2016年12月—2023年12月,共21例患者符合選擇標準納入研究。其中,10例接受機器人輔助微創后路內固定手術(機器人組),11例接受傳統透視輔助開放后路內固定手術(透視組)。兩組患者性別、年齡、骨折椎體節段分布、骨折AO分型、受傷至手術時間以及術前疼痛視覺模擬評分(VAS)、美國脊髓損傷學會(ASIA)分級等基線資料比較,差異均無統計學意義(P>0.05),具有可比性。見表1。
1.2 手術方法
兩組手術均由同一組術者完成。所有患者全身麻醉后取俯臥位。
透視組:C臂X線機透視確定病變節段,在病變椎體正中作縱切口,沿棘突和椎板剝離椎旁肌,暴露椎板和小關節。透視下,徒手將椎弓根螺釘(UPASS系統,山東威高骨科材料股份有限公司)經雙側椎弓根植入骨折椎體及上、下相鄰2~3個節段。本組9例合并神經功能障礙者行椎板切除減壓,后外側行自體碎骨植骨融合。切口放置引流管后縫合關閉。
機器人組:首先應用C臂或O臂X線機掃描獲取三維圖像,傳輸至機器人系統主控臺進行植釘路徑規劃。機械臂按照規劃路徑運行至相應位置后,采用經皮膚表面定位技術將克氏針鉆入椎體,即套筒抵至皮膚表面后不切開皮膚,直接將導針刺入皮膚并鉆入椎體[11],皮膚表面保留5 mm克氏針殘端。沿中線切開皮膚至筋膜層,牽開筋膜顯露克氏針殘余部分。通過克氏針經肌間植入空心椎弓根螺釘(UPASSⅡ系統,山東威高骨科材料股份有限公司),固定節段為骨折椎體及上、下相鄰2~3個節段。本組8例合并神經功能障礙者行局部剝離后椎板切除減壓,取自體碎骨行減壓節段的后外側植骨。
1.3 療效評價指標
記錄兩組手術時間、術中出血量、輻射暴露時間、輻射劑量、住院時間、并發癥發生情況。基于術后1周內CT,參照Gertzbein-Robbins標準[12]評價螺釘植入精準度,共分為5個等級:A級,螺釘完全在椎弓根內;B級,超出椎弓根<2 mm;C級,超出椎弓根2~4 mm;D級,超出椎弓根4~6 mm;E級,超出椎弓根≥6 mm。A、B級螺釘位置被認為臨床可接受,其他級別螺釘位置為不可接受。隨訪期間采用VAS評分和ASIA分級評價疼痛及神經功能狀態。
1.4 統計學方法
采用SPSS20.0統計軟件進行分析。計量資料經Shapiro-Wilk檢驗均符合正態分布,以均數±標準差表示,組間比較采用獨立樣本t檢驗;兩組多時間點比較采用重復測量方差分析,若不滿足球形檢驗,采用Greenhouse-Geisser法進行校正,同一組別不同時間點間比較采用 Bonferroni 法。計數資料組間比較采用四格表卡方檢驗及列聯表卡方檢驗。等級資料組間比較采用Wilcoxon秩和檢驗,兩組多時間點比較采用廣義估計方程。檢驗水準α=0.05。
2 結果
兩組手術均順利完成,手術時間差異無統計學意義(P>0.05)。與透視組相比,機器人組術中出血量及住院時間減少,輻射暴露時間及輻射劑量增加,差異均有統計學意義(P<0.05)。兩組共植入249枚椎弓根螺釘,其中機器人組118枚、透視組131枚。參照Gertzbein-Robbins標準,機器人組臨床可接受螺釘占比明顯高于透視組,差異有統計學意義(P<0.05)。見表2。
兩組患者術后均獲隨訪,隨訪時間3~12個月,平均6.8個月。兩組術后1周及3個月時VAS評分均較術前下降,差異有統計學意義(P<0.05);術后1周及3個月時機器人組評分均低于透視組,差異有統計學意義(P<0.05)。見圖1。術后機器人組4例(40.0%)、透視組5例(45.5%)術前神經功能障礙患者ASIA分級改善,但術前A級患者神經功能均無改善。兩組術后1周及3個月時ASIA分級與術前比較,差異無統計學意義(P>0.05);術后兩時間點兩組間差異亦無統計學意義(P>0.05)。見表2、圖2。
圖1
兩組患者VAS評分變化趨勢
Figure1.
Change trends of VAS score in the two groups
圖2
機器人組患者,男,57歲,AS合并T12骨折(AO分型B型,ASIA分級A級)
a. 術前正側位X線片; b. 術中規劃螺釘植入路徑; c. 在機械臂引導下經皮置入克氏針; d. 在皮外剪斷克氏針; e. 作正中切口,通過克氏針經肌間植入空心椎弓根螺釘; f. 經肌間安裝鈦棒; g. 局部有限剝離椎板切除減壓; h. 術后3個月正側位X線片
Figure2. A 57-year-old male patient with AS and T12 fracture (AO type B, ASIA grading A) in the RA groupa. Preoperative anteroposterior and lateral X-ray films; b. Intraoperative planning of screw placement path; c. Percutaneous insertion of Kirschner wire under the guidance of a robotic arm; d. Cut Kirschner wire outside the skin; e. A median incision was made, and hollow pedicle screws were implanted through Kirschner wire; f. Intramuscular installation of titanium rods; g. Local laminectomy and decompression; h. Anteroposterior and lateral X-ray films at 3 months after surgery
并發癥方面,透視組1例發生手術部位深部感染,經徹底清創、負壓吸引縫合后切口愈合良好;1例發生下肢深靜脈血栓形成,給予抗凝治療2個月。機器人組無并發癥發生。兩組并發癥發生率比較差異無統計學意義(P>0.05)。見表2。
3 討論
AS胸腰椎骨折傳統后路開放手術需要廣泛剝離變性椎旁肌,手術創傷大、出血多、發生感染風險較高,可進一步加重肌萎縮,導致術后腰背部無力及慢性腰背痛等[13]。與傳統開放手術相比,微創手術治療AS胸腰椎骨折不僅能取得相似療效,還具有對椎旁肌干擾小、手術創傷小、失血少、感染風險低的優勢[14]。AS胸腰椎骨折的常規微創手術方法是透視下經皮椎弓根螺釘固定,即透視經皮經椎弓根置入椎體內穿刺針并插入導針,沿導針上、下切開皮膚1.5 cm左右,擴張、攻絲,并植入椎弓根螺釘,經皮穿棒固定。然而,由于小切口皮膚及深筋膜的阻擋,長節段經皮螺釘固定的鈦棒安放相對困難[15]。在合并椎體脫位情況下,經皮螺釘植入及鈦棒安裝更困難,可能增加手術時間和術中輻射暴露。此外,這種長節段經皮手術的一釘一切口會影響患者背部外觀。椎弓根螺釘的精準植入是脊柱手術重要環節,位置不良的椎弓根螺釘可導致嚴重神經血管損傷。傳統開放或經皮微創均為透視輔助下的徒手植釘,與正常脊柱相比,AS患者脊柱關節突融合、畸形,解剖標志不清進一步增加了椎弓根螺釘植入難度[16],而骨科機器人的應用顯著提高了植釘精準度[17]。但機器人輔助AS胸腰椎骨折開放手術仍需廣泛剝離,顯露植釘解剖標志點[18],無法避免手術創傷大的問題;同時既往機器人輔助經皮腰椎植釘研究表明,小切口套筒穿過筋膜、肌肉植釘時,肌肉纖維束及其他軟組織壓力會使植釘套筒偏離規劃進釘點,影響植釘準確性[19]。
基于以上問題,我們對機器人輔助手術步驟進行了改良:① 機器人輔助下經皮膚表面定位,套筒抵至皮膚表面后不切開皮膚,而是將導針直接刺入皮膚抵至骨面并鉆入椎弓根;② 驗證導針位置滿意后剪斷導針,正中切開皮膚至筋膜層,并將導針殘端從筋膜層翻出;③ 將空心椎弓根螺釘沿導針經肌間植入椎體,無需剝離椎旁肌;④ 若需減壓,可行責任節段局部剝離后椎板減壓。該方法皮外穿針利用克氏針針頭鋒利、直徑小的特點,在肌間走行阻力小,降低了針尖偏移可能性,保證了置針精準性。此外,該方法僅需一個常規正中切口,不是兩排多個小切口,改善了患者背部美觀度,也方便了長節段鈦棒的安放。經機器人組的臨床應用,我們認為該改良手術流程實現了AS胸腰椎骨折治療的機器人精準與微創相結合。同時,我們將該方法用于青少年特發性脊柱側彎的治療中,也發揮了機器人手術微創化與植釘精準性的優勢[11]。
本研究結果顯示,機器人組術中出血量明顯少于透視組,說明機器人改良微創方案可以減少患者術中失血。兩組手術時間無明顯差異,分析與術中機器人準備、術中三維掃描、植釘規劃等需要額外時間有關。機器人組無并發癥發生,透視組發生深部切口感染及下肢深靜脈血栓形成各1例,分析可能與開放手術時間長、術后臥床時間長有關。Kohler等[20]發現AS胸腰椎骨折微創手術組無并發癥發生,而開放手術組術后感染發生率為7%,分析感染與AS肌肉炎性改變及手術損傷后肌萎縮相關。
在植釘精準度方面,本研究結果顯示機器人輔助微創植釘準確率顯著高于傳統開放透視徒手植釘,其中兩組臨床可接受的螺釘位置(A、B級)分別為95.8%和87.8%,與既往研究報道機器人輔助椎弓根植釘準確性結果相似[7],進一步證明了本研究采用的機器人輔助經皮膚表面定位穿針能夠維持機器人植釘手術的高準確性。對于機器人手術中的誤植螺釘(C、D、E級),可能是由于針頭打滑造成[21],可以選擇入針點為非骨表面斜坡處或者使用高速鉆來改善滑動現象。
目前,關于AS胸腰椎骨折的微創手術與開放手術輻射暴露研究結果尚不一致。Kohler等[20]研究發現微創手術和開放手術治療AS胸腰椎骨折的術中透視時間無明顯差異,而Kai等[22]發現微創手術需要透視時間更長。在機器人手術中的輻射暴露程度可能與機器人類型相關。我們既往報道天璣骨科機器人應用于脊柱手術雖然可以減少術中輻射暴露,但與透視技術相比,會增加患者輻射暴露[23-24]。本研究中,我們發現機器人組患者接受輻射暴露時間明顯長于透視組,總輻射劑量也明顯高于透視組。考慮到醫生在手術室進行C臂或O臂三維掃描或透視時可以遠離輻射區域,我們沒有對醫生的輻射暴露進行評估。
在臨床療效上,我們發現術后1周及3個月時機器人組VAS評分明顯低于透視組,機器人組對椎旁肌損傷更小,可能更有利于患者術后疼痛緩解。不完全神經功能障礙患者均有部分改善,而完全神經功能缺損患者神經功能無改善,兩組也無明顯差異。本研究中機器人組可行骨折脫位節段局部椎板減壓,有助于神經功能的恢復,效果等同于開放手術。
本研究仍存在不足:本研究為一項單中心回顧性研究,因AS胸腰椎骨折病種限制,兩組研究樣本量也較小,影響統計結果;兩組患者隨訪時間短,術后神經功能改善效果有待進一步觀察。
綜上述,機器人微創手術和傳統透視開放手術在緩解疼痛、改善神經功能方面均能取得良好效果。與傳統透視開放手術相比,機器人微創手術在減少術中出血量、縮短住院時間等方面更具優勢,且顯著提高了椎弓根螺釘植入的準確度。
利益沖突 在課題研究和文章撰寫過程中不存在利益沖突
機構倫理 研究方案經中國醫科大學附屬第一醫院醫學科學研究倫理委員會批準(2018-254-2)
作者貢獻聲明 袁偉:研究設計及實施、起草文章;劉欣春、叢琳、朱海濤:研究實施、數據收集;崔璀、裴磊、王翰:參與數據整理與分析;朱悅:研究設計、文章審閱與修改