配制了與人體軟組織性能相近的水凝膠人造軟組織。采用由光學平臺、相機及支架、相機光源等組成的圖像采集設備,記錄嵌入在軟組織內標識物的連續位移,研究穿刺過程中軟組織的變形規律。在分析標識物在X方向和Y方向上位移的基礎上,基于反向傳播(BP)神經網絡,建立標識物在Y方向上的神經網絡模型。通過與實驗數據對比,神經網絡模型的擬合度在95%以上,有效數據的最大相對誤差控制在30%,最大絕對誤差為0.8 mm,能夠較好地定量預測穿刺過程中軟組織的變形。研究結果可有效提高軟組織針穿刺靶點精度。
引用本文: 高德東, 趙廣偉, 王珊, 朱侗. 針穿刺軟組織變形預測模型研究. 生物醫學工程學雜志, 2016, 33(3): 442-447. doi: 10.7507/1001-5515.20160075 復制
版權信息: ?四川大學華西醫院華西期刊社《生物醫學工程學雜志》版權所有,未經授權不得轉載、改編
引言
目前,機器人輔助微創介入外科手術的可行性已經得到了臨床證明。針穿刺是一種極其復雜的微創手術過程,許多外科診斷、治療都要求將針穿刺到指定的位置,即靶點。其中大多數的穿刺靶點都在軟組織器官上(如腎、肝臟、前列腺等)[1]。目前在臨床上,采用的大多是剛性的穿刺針,由于其剛度較高,且大部分沿直線路徑穿刺,一般情況下無法避開器官障礙點進行靶向穿刺手術。因此,國內外開始探索利用柔性穿刺針代替剛性穿刺針進行穿刺手術。但在柔性針穿刺的過程中,柔性針的撓曲會使軟組織產生變形,從而造成靶點位置的誤差,這樣可能會引起嚴重的并發癥[2],對患者造成二次傷害。因此如何使柔性針精準地穿刺到指定位置,是目前亟待解決的問題。
現階段,已有了多種對軟組織變形進行建模的方法[3-5],但有些是對計算要求較高或模型過于理想,不能簡便、直接地應用到實際的機器人輔助針穿刺過程中,有些則是沒有考慮速度、針型等參數對仿真的影響。總的來說,離實際應用于臨床還有一段距離[6]。本文通過實驗的方法得出軟組織變形與穿刺速度、針的直徑和時間之間的關系,研究結果可簡便、直接地應用到機器人輔助針穿刺的路徑規劃當中。
1 針穿刺軟組織的實驗
1.1 實驗方法
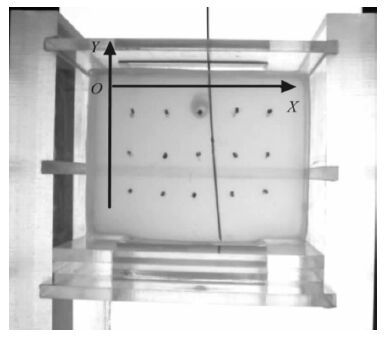
本文采用輔助針穿刺運動機構操控柔性針進行穿刺,用聚乙烯醇(polyvinyl alcohol,PVA)水凝膠人造組織代替真實的豬肝組織,為將來代替人體組織做鋪墊[7]。選取長度200 mm,針型18G、20G、21G(即直徑1.2 mm、0.8 mm、0.75 mm)[8]的柔性穿刺針,記錄在三種穿刺速度下軟組織隨時間的變形。利用在軟組織中嵌入標識物(珠子)并研究其在針穿刺時的位移變化來體現軟組織的變形,實驗中珠子的間距均為15 mm,如圖 1所示。其中,通過X、Y兩個方向上的位移變化來進行分析。為避免穿刺時針的變形導致軟組織在二維平面以外發生變形,在進行穿刺時,始終保持針尖斜角朝向與珠子所在平面一致。
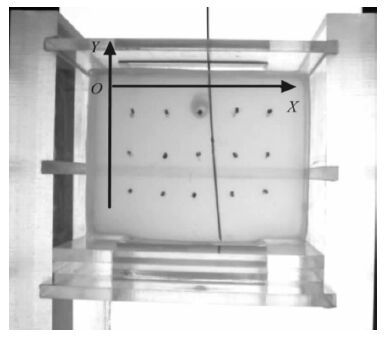 圖1
內嵌珠子的軟組織
Figure1.
Soft tissue with embedded beads
圖1
內嵌珠子的軟組織
Figure1.
Soft tissue with embedded beads
1.2 實驗材料
通過實驗,發現PVA、二甲基亞砜、去離子水的質量分數比為8∶60∶40時,假體組織的力學性能與豬肝的力學性能最為相似,其力學參數為:泊松比0.5,彈性模量19.546 kPa。
1.3 實驗裝置
1.3.1 圖像采集部分的整體結構
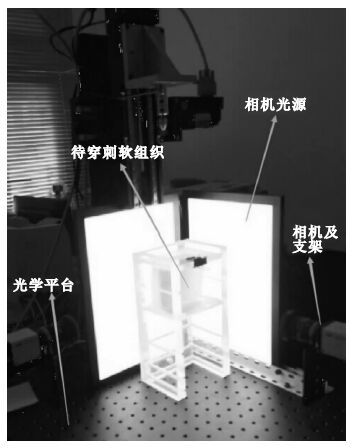
在實驗中圖像采集部分主要由光學平臺、相機及支架、相機光源等四部分組成,搭建的圖像采集平臺如圖 2所示。
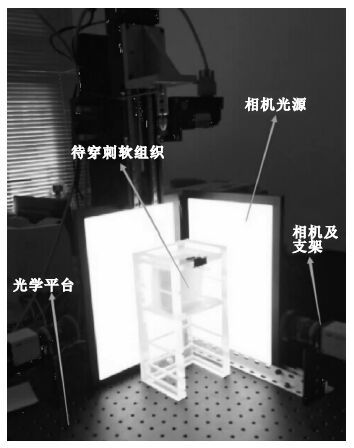 圖2
圖像采集設備
Figure2.
Image acquisition device
圖2
圖像采集設備
Figure2.
Image acquisition device
1.3.2 穿刺裝置
實驗中輔助針穿刺運動機構可以實現進針,如圖 3所示。該機構包含可實現水平和垂直方向直線運動的兩套滾珠絲杠,由步進電機驅動,可以調節所需要的進針速度。
 圖3
輔助針穿刺運動機構
Figure3.
Motion structure of the auxiliary insertion needle
圖3
輔助針穿刺運動機構
Figure3.
Motion structure of the auxiliary insertion needle
1.3.3 數據采集
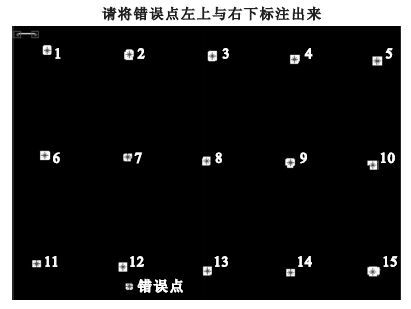
將相機拍攝的照片利用Matlab編程后轉化為圖 4的形式,即可采集到每個珠子在XY坐標系上的坐標。
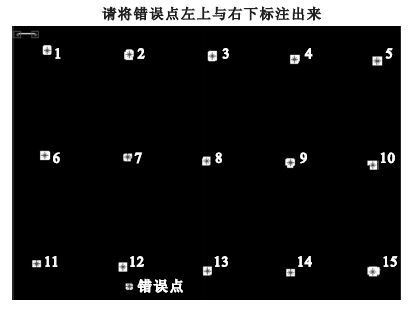 圖4
珠子坐標采集程序
Figure4.
Acquisition program of the beads coordinate
圖4
珠子坐標采集程序
Figure4.
Acquisition program of the beads coordinate
1.4 實驗過程
選取穿刺速度為5、10、15 mm/s,相機的幀頻也相應地設置為5、10、15,使每一個針型的柔性針都在三個速度下進行穿刺,穿刺深度相同,均為100 mm,共進行三組實驗,以消除實驗的不確定性。通過Matlab軟件進行編程獲取每一個珠子的坐標,與其初始位置相減得到每一個時刻的位移。
2 實驗數據分析
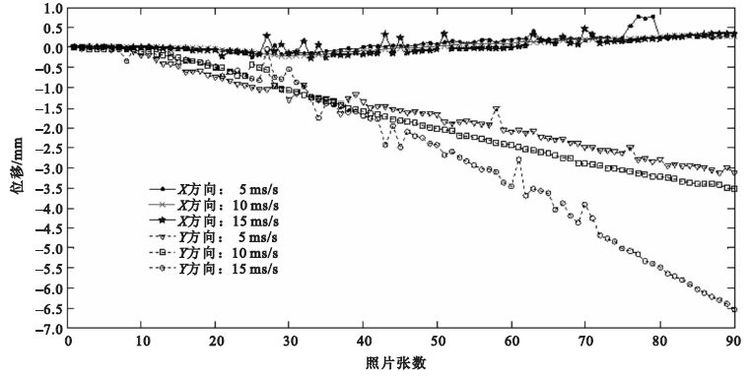
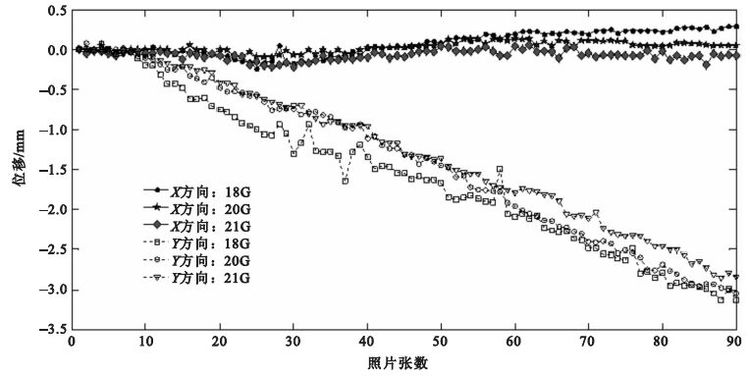
軟組織的變形通過珠子在X方向、Y方向上的位移變化來體現。選取第3顆珠子為代表對象進行分析,其在18G針的穿刺作用下在X、Y方向上的位移趨勢和在穿刺速度為5 mm/s時的X、Y方向上的位移趨勢如圖 5、圖 6所示。可以看出在X方向上,以18G針進行穿刺時的三個速度下的位移趨勢大致相同,以5 mm/s的穿刺速度進行穿刺時的三個針型下的位移趨勢也大致相同,另外其位移大小相對于Y方向上的位移大小也非常小,在0~0.3 mm范圍內,而針穿刺的允許誤差一般是在毫米級內[9],因此可以認為速度、針型對X方向位移的影響不是特別明顯。
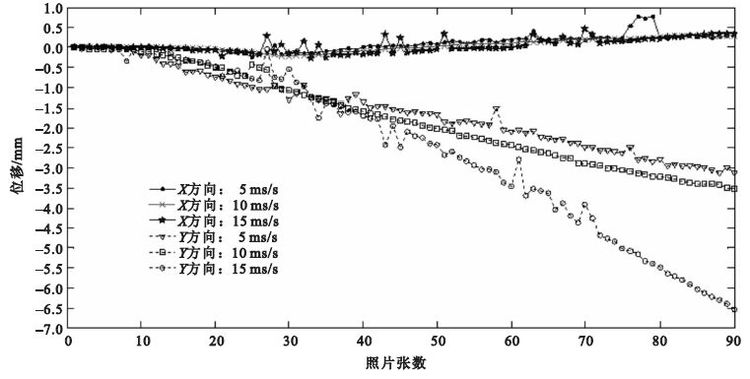 圖5
針型18G下的X、Y方向位移趨勢
Figure5.
Trend of X,Y direction displacement with needle 18G
圖5
針型18G下的X、Y方向位移趨勢
Figure5.
Trend of X,Y direction displacement with needle 18G
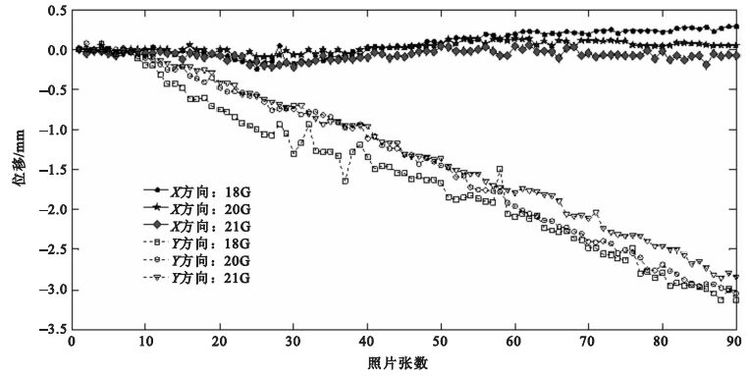 圖6
速度5 mm/s下的X、Y方向位移趨勢
Figure6.
Trend of X,Y direction displacement with velocity of 5 mm/s
圖6
速度5 mm/s下的X、Y方向位移趨勢
Figure6.
Trend of X,Y direction displacement with velocity of 5 mm/s
從圖上分析可知,在針穿刺過程中,珠子在X方向上是先向針尖斜角的朝向偏移,隨后向針發生撓曲的方向偏移,而珠子的位移主要發生在Y方向上,并且位移變化與時間、穿刺速度、針的直徑呈復雜的非線性關系[10],決定采用反向傳播(back propagation,BP)神經網絡進行預測。
3 Y方向位移的BP神經網絡模型
3.1 BP神經網絡
BP神經網絡是一種按誤差逆傳播算法訓練的多層前饋網絡。數學理論證明三層的神經網絡就能夠以任意精度逼近任何非線性連續函數。
BP 神經網絡的基本原理是采用梯度下降法,通過反向傳播來不斷調整網絡的權值和閾值,使網絡的實際輸出值和期望輸出值的均方誤差和最小。因此,該方法的實質是求誤差函數的最小值,它通過反復訓練,將多個已知樣本訓練得到的各層連接權及各層神經元的偏置值作為信息保存,以便對非訓練樣本進行預測。
BP神經網絡模型具有很強的自學習、自適應能力,且容錯性高、計算簡單,因此應用廣泛。
3.2 珠子Y方向位移的神經網絡模型
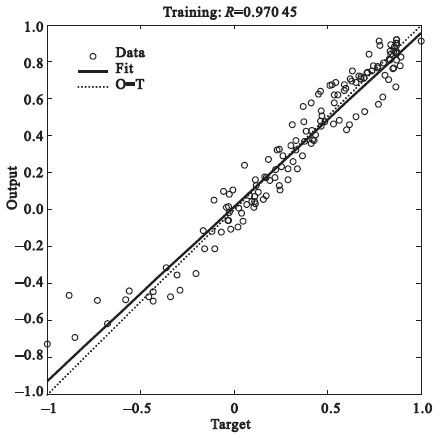
選取時間、穿刺速度、針的直徑作為神經網絡模型的輸入,珠子Y方向上的位移作為神經網絡模型的輸出目標值,如表 1所示。因此確定輸入層神經元個數為3個,輸出層神經元個數為1個。隱含層的神經元數目并不是固定的,需要經過實際訓練的檢驗來不斷調整,對于隱含層的神經元數目根據經驗公式p=n+m+a[11-12](p為隱含層的神經元個數,n和m分別為輸入層和輸出層的端點數,a取1~10) 選為10個。隱含層激活函數為對數S形轉移函數,輸出層激活函數為線性函數。訓練算法采用梯度下降自適應學習率訓練函數。在訓練前,將輸入、輸出數據進行歸一化處理,經過迭代使網絡訓練誤差收斂。訓練結果非常好,擬合度如圖 7所示,在0.95以上。
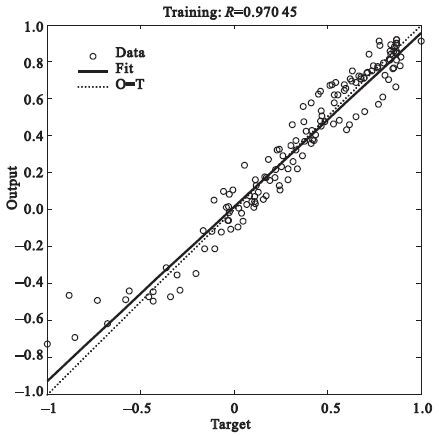 圖7
第3顆珠子的神經網絡擬合度
Figure7.
Goodness-of-fit scores of the third bead
圖7
第3顆珠子的神經網絡擬合度
Figure7.
Goodness-of-fit scores of the third bead
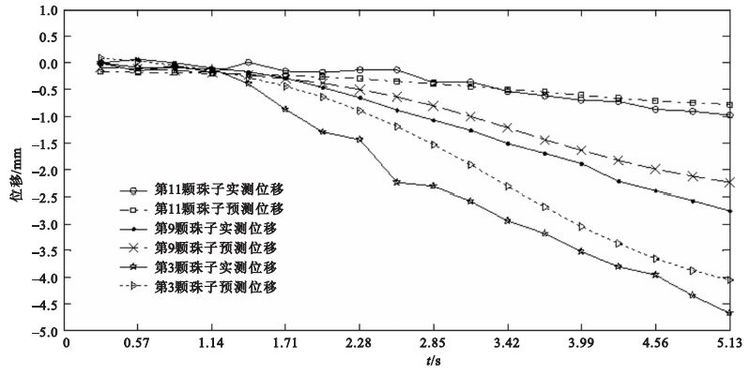
為了進一步檢驗該神經網絡模型預測結果的可靠程度,以第3、9、11顆珠子為分析對象,選取已知的針型21G、速度15 mm/s的數據作為測試樣本,利用建立的BP神經網絡模型對該輸入下的位移進行預測和檢驗,并將結果進行比較。如圖 8所示,曲線分別是每個珠子基于實驗得出的位移數據和利用BP神經網絡進行預測得出的位移數據。可以看出,兩者吻合程度較高,從而驗證了該神經網絡模型是可靠的。
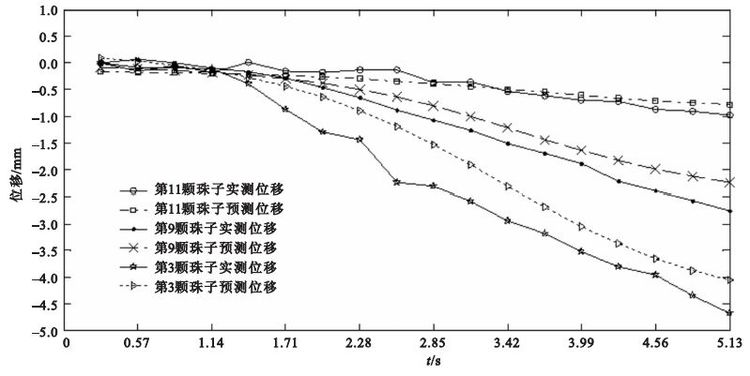 圖8
針型21G、速度15 mm/s下的神經網絡預測對比圖
Figure8.
Comparison of the prediction value with needle 21G and velocity 15 mm/s and measured value
圖8
針型21G、速度15 mm/s下的神經網絡預測對比圖
Figure8.
Comparison of the prediction value with needle 21G and velocity 15 mm/s and measured value
利用此網絡,即可預測珠子在任意速度、針型下的某時刻的Y方向上的位移。
3.3 利用神經網絡模型進行預測
為了使針穿刺到指定的靶點位置,必然要進行穿刺路徑的規劃,在進行針穿刺路徑的規劃時,除了要考慮柔性針自身產生的撓曲對路徑產生的影響,還要考慮軟組織變形帶來的影響。因此,通過該網絡模型進行軟組織變形預測對路徑規劃和避障運動具有重要意義。選取第13顆珠子為預測對象,數據如表 2所示。由于實際位移自身數量級較小,導致最小相對誤差在2%左右,最大相對誤差在30%左右,但是絕對誤差都在精度要求范圍內。由表 2可見,相對于利用有限元模型進行軟組織變形的仿真[13],利用本文提出的BP神經網絡模型獲得的數據更加全面,對復雜的機器人輔助針穿刺路徑規劃更具意義。
4 結論
通過利用機器人操控柔性針進行穿刺PVA水凝膠人造組織的實驗,獲得了軟組織在X、Y方向上的位移變化,發現柔性針穿刺過程中對軟組織造成的變形主要發生在Y方向上,即穿刺方向,并且與針的穿刺速度、直徑有著非線性關系;而在X方向上組織的變形與針的穿刺速度、直徑并無直接關系,且變形量極小。因此,規劃機器人輔助針穿刺路徑時應主要考慮軟組織在穿刺方向上的變形對路徑的影響。本研究利用BP神經網絡建立了穿刺速度、針的直徑與組織變形之間的關系模型來研究它們之間的非線性關系,結果能夠較好地定量預測穿刺過程中軟組織的變形。
該神經網絡模型對實現針穿刺前的路徑規劃、避障運動,以及提高穿刺精度具有很大的參考價值。下一步將結合柔性針在穿刺過程中產生的撓曲,初步建立可以應用到臨床上的機器人輔助針穿刺控制系統。
引言
目前,機器人輔助微創介入外科手術的可行性已經得到了臨床證明。針穿刺是一種極其復雜的微創手術過程,許多外科診斷、治療都要求將針穿刺到指定的位置,即靶點。其中大多數的穿刺靶點都在軟組織器官上(如腎、肝臟、前列腺等)[1]。目前在臨床上,采用的大多是剛性的穿刺針,由于其剛度較高,且大部分沿直線路徑穿刺,一般情況下無法避開器官障礙點進行靶向穿刺手術。因此,國內外開始探索利用柔性穿刺針代替剛性穿刺針進行穿刺手術。但在柔性針穿刺的過程中,柔性針的撓曲會使軟組織產生變形,從而造成靶點位置的誤差,這樣可能會引起嚴重的并發癥[2],對患者造成二次傷害。因此如何使柔性針精準地穿刺到指定位置,是目前亟待解決的問題。
現階段,已有了多種對軟組織變形進行建模的方法[3-5],但有些是對計算要求較高或模型過于理想,不能簡便、直接地應用到實際的機器人輔助針穿刺過程中,有些則是沒有考慮速度、針型等參數對仿真的影響。總的來說,離實際應用于臨床還有一段距離[6]。本文通過實驗的方法得出軟組織變形與穿刺速度、針的直徑和時間之間的關系,研究結果可簡便、直接地應用到機器人輔助針穿刺的路徑規劃當中。
1 針穿刺軟組織的實驗
1.1 實驗方法
本文采用輔助針穿刺運動機構操控柔性針進行穿刺,用聚乙烯醇(polyvinyl alcohol,PVA)水凝膠人造組織代替真實的豬肝組織,為將來代替人體組織做鋪墊[7]。選取長度200 mm,針型18G、20G、21G(即直徑1.2 mm、0.8 mm、0.75 mm)[8]的柔性穿刺針,記錄在三種穿刺速度下軟組織隨時間的變形。利用在軟組織中嵌入標識物(珠子)并研究其在針穿刺時的位移變化來體現軟組織的變形,實驗中珠子的間距均為15 mm,如圖 1所示。其中,通過X、Y兩個方向上的位移變化來進行分析。為避免穿刺時針的變形導致軟組織在二維平面以外發生變形,在進行穿刺時,始終保持針尖斜角朝向與珠子所在平面一致。
圖1
內嵌珠子的軟組織
Figure1.
Soft tissue with embedded beads
1.2 實驗材料
通過實驗,發現PVA、二甲基亞砜、去離子水的質量分數比為8∶60∶40時,假體組織的力學性能與豬肝的力學性能最為相似,其力學參數為:泊松比0.5,彈性模量19.546 kPa。
1.3 實驗裝置
1.3.1 圖像采集部分的整體結構
在實驗中圖像采集部分主要由光學平臺、相機及支架、相機光源等四部分組成,搭建的圖像采集平臺如圖 2所示。
圖2
圖像采集設備
Figure2.
Image acquisition device
1.3.2 穿刺裝置
實驗中輔助針穿刺運動機構可以實現進針,如圖 3所示。該機構包含可實現水平和垂直方向直線運動的兩套滾珠絲杠,由步進電機驅動,可以調節所需要的進針速度。
圖3
輔助針穿刺運動機構
Figure3.
Motion structure of the auxiliary insertion needle
1.3.3 數據采集
將相機拍攝的照片利用Matlab編程后轉化為圖 4的形式,即可采集到每個珠子在XY坐標系上的坐標。
圖4
珠子坐標采集程序
Figure4.
Acquisition program of the beads coordinate
1.4 實驗過程
選取穿刺速度為5、10、15 mm/s,相機的幀頻也相應地設置為5、10、15,使每一個針型的柔性針都在三個速度下進行穿刺,穿刺深度相同,均為100 mm,共進行三組實驗,以消除實驗的不確定性。通過Matlab軟件進行編程獲取每一個珠子的坐標,與其初始位置相減得到每一個時刻的位移。
2 實驗數據分析
軟組織的變形通過珠子在X方向、Y方向上的位移變化來體現。選取第3顆珠子為代表對象進行分析,其在18G針的穿刺作用下在X、Y方向上的位移趨勢和在穿刺速度為5 mm/s時的X、Y方向上的位移趨勢如圖 5、圖 6所示。可以看出在X方向上,以18G針進行穿刺時的三個速度下的位移趨勢大致相同,以5 mm/s的穿刺速度進行穿刺時的三個針型下的位移趨勢也大致相同,另外其位移大小相對于Y方向上的位移大小也非常小,在0~0.3 mm范圍內,而針穿刺的允許誤差一般是在毫米級內[9],因此可以認為速度、針型對X方向位移的影響不是特別明顯。
圖5
針型18G下的X、Y方向位移趨勢
Figure5.
Trend of X,Y direction displacement with needle 18G
圖6
速度5 mm/s下的X、Y方向位移趨勢
Figure6.
Trend of X,Y direction displacement with velocity of 5 mm/s
從圖上分析可知,在針穿刺過程中,珠子在X方向上是先向針尖斜角的朝向偏移,隨后向針發生撓曲的方向偏移,而珠子的位移主要發生在Y方向上,并且位移變化與時間、穿刺速度、針的直徑呈復雜的非線性關系[10],決定采用反向傳播(back propagation,BP)神經網絡進行預測。
3 Y方向位移的BP神經網絡模型
3.1 BP神經網絡
BP神經網絡是一種按誤差逆傳播算法訓練的多層前饋網絡。數學理論證明三層的神經網絡就能夠以任意精度逼近任何非線性連續函數。
BP 神經網絡的基本原理是采用梯度下降法,通過反向傳播來不斷調整網絡的權值和閾值,使網絡的實際輸出值和期望輸出值的均方誤差和最小。因此,該方法的實質是求誤差函數的最小值,它通過反復訓練,將多個已知樣本訓練得到的各層連接權及各層神經元的偏置值作為信息保存,以便對非訓練樣本進行預測。
BP神經網絡模型具有很強的自學習、自適應能力,且容錯性高、計算簡單,因此應用廣泛。
3.2 珠子Y方向位移的神經網絡模型
選取時間、穿刺速度、針的直徑作為神經網絡模型的輸入,珠子Y方向上的位移作為神經網絡模型的輸出目標值,如表 1所示。因此確定輸入層神經元個數為3個,輸出層神經元個數為1個。隱含層的神經元數目并不是固定的,需要經過實際訓練的檢驗來不斷調整,對于隱含層的神經元數目根據經驗公式p=n+m+a[11-12](p為隱含層的神經元個數,n和m分別為輸入層和輸出層的端點數,a取1~10) 選為10個。隱含層激活函數為對數S形轉移函數,輸出層激活函數為線性函數。訓練算法采用梯度下降自適應學習率訓練函數。在訓練前,將輸入、輸出數據進行歸一化處理,經過迭代使網絡訓練誤差收斂。訓練結果非常好,擬合度如圖 7所示,在0.95以上。
圖7
第3顆珠子的神經網絡擬合度
Figure7.
Goodness-of-fit scores of the third bead
為了進一步檢驗該神經網絡模型預測結果的可靠程度,以第3、9、11顆珠子為分析對象,選取已知的針型21G、速度15 mm/s的數據作為測試樣本,利用建立的BP神經網絡模型對該輸入下的位移進行預測和檢驗,并將結果進行比較。如圖 8所示,曲線分別是每個珠子基于實驗得出的位移數據和利用BP神經網絡進行預測得出的位移數據。可以看出,兩者吻合程度較高,從而驗證了該神經網絡模型是可靠的。
圖8
針型21G、速度15 mm/s下的神經網絡預測對比圖
Figure8.
Comparison of the prediction value with needle 21G and velocity 15 mm/s and measured value
利用此網絡,即可預測珠子在任意速度、針型下的某時刻的Y方向上的位移。
3.3 利用神經網絡模型進行預測
為了使針穿刺到指定的靶點位置,必然要進行穿刺路徑的規劃,在進行針穿刺路徑的規劃時,除了要考慮柔性針自身產生的撓曲對路徑產生的影響,還要考慮軟組織變形帶來的影響。因此,通過該網絡模型進行軟組織變形預測對路徑規劃和避障運動具有重要意義。選取第13顆珠子為預測對象,數據如表 2所示。由于實際位移自身數量級較小,導致最小相對誤差在2%左右,最大相對誤差在30%左右,但是絕對誤差都在精度要求范圍內。由表 2可見,相對于利用有限元模型進行軟組織變形的仿真[13],利用本文提出的BP神經網絡模型獲得的數據更加全面,對復雜的機器人輔助針穿刺路徑規劃更具意義。
4 結論
通過利用機器人操控柔性針進行穿刺PVA水凝膠人造組織的實驗,獲得了軟組織在X、Y方向上的位移變化,發現柔性針穿刺過程中對軟組織造成的變形主要發生在Y方向上,即穿刺方向,并且與針的穿刺速度、直徑有著非線性關系;而在X方向上組織的變形與針的穿刺速度、直徑并無直接關系,且變形量極小。因此,規劃機器人輔助針穿刺路徑時應主要考慮軟組織在穿刺方向上的變形對路徑的影響。本研究利用BP神經網絡建立了穿刺速度、針的直徑與組織變形之間的關系模型來研究它們之間的非線性關系,結果能夠較好地定量預測穿刺過程中軟組織的變形。
該神經網絡模型對實現針穿刺前的路徑規劃、避障運動,以及提高穿刺精度具有很大的參考價值。下一步將結合柔性針在穿刺過程中產生的撓曲,初步建立可以應用到臨床上的機器人輔助針穿刺控制系統。