傳統鏡像訓練中,患肢難以真實運動,通過康復機器人可對患肢實現真實的物理鏡像。在此訓練過程中,患肢通常處于被動狀態。而隨著患肢運動能力的逐漸恢復,主動鏡像訓練則成為更好的選擇。為此,本文采用一款自制的結構可調的肩關節康復機器人作為實驗平臺,提出一種由健肢慣性測量單元(IMU)軌跡獲取、閉環變論域模糊自適應比例微分(PD)控制、患肢表面肌電信號(sEMG)肌力估計和外環患肢助力補償四個環節組成的鏡像主動康復訓練系統。實驗結果表明,此控制系統可根據患肢的恢復情況實時提供助力補償,充分發揮了患肢的訓練主動性,使患肢達到較好的康復訓練效果。
引用本文: 陳盛, 嚴以哲, 徐國政, 高翔, 黃康金, 邰春. 面向肩關節自適應調節助力的鏡像式主動康復訓練. 生物醫學工程學雜志, 2021, 38(2): 351-360. doi: 10.7507/1001-5515.202001053 復制
版權信息: ?四川大學華西醫院華西期刊社《生物醫學工程學雜志》版權所有,未經授權不得轉載、改編
引言
隨著中國逐漸步入老齡社會,腦卒中的老年患者逐漸增多,給社會和家庭帶來沉重負擔。傳統康復治療方法不僅訓練強度弱、效率低下,而且在治療效果及康復評價等方面受制于醫師的主觀臨床經驗。而近年來具有高重復性、高精確性等特點的可穿戴式康復機器人技術可在一定程度上解決此問題[1-4]。
鏡像康復訓練是指利用平面鏡成像原理,將健肢活動的畫面復制到患肢,通過視錯覺及視覺反饋,讓患者想象成患肢運動的一種康復治療手段[5]。鏡像康復訓練方法在提高康復訓練效果方面取得了較好的效果,但在傳統的鏡像療法中患側并沒有得到實際的康復訓練運動。為了在一定程度上解決傳統鏡像康復療法中存在的問題,近年來國內外研究機構將鏡像療法融入機器人輔助康復訓練系統[6]。Wang 等[7]使用慣性測量單元(Inertial Measurement Unit,IMU)測得健肢關節空間運動軌跡映射至患肢外骨骼做同步鏡像運動,提高了患者的康復效果。Gao 等[8]利用 Kinect、外骨骼開發了一套虛擬現實鏡像訓練系統,以檢測康復機器人的運動意圖,實驗表明是一種可廣泛采用的治療干預方法。Kim 等[9]提出將功能性電刺激與鏡像療法相結合,發現此方法可有效改善腦卒中患者的上肢運動功能。Kojima 等[10]將肌電觸發神經肌肉刺激與鏡像療法聯合,發現腦卒中患者的肢體運動功能及關節活動角度均有明顯改善。諸多研究表明,患者健患肢同時進行康復訓練效果更好[11-12]。
上述鏡像療法通過康復機器人輔助患肢與健肢做同步鏡像運動,實現患肢的康復訓練,但這只是單純的被動式跟隨訓練,沒有考慮到患肢的實時恢復情況,訓練效果有限。針對此問題,提出一種自適應調節助力的鏡像康復訓練控制方法。該方法通過構建肩關節動力學模型和肌力估計模型計算出患肢補償力矩,可對患肢提供實時的助力補償,提高了患肢訓練的主動性,實現了在鏡像訓練過程中最大程度地訓練患肢肌力。
1 肩關節康復機器人結構設計
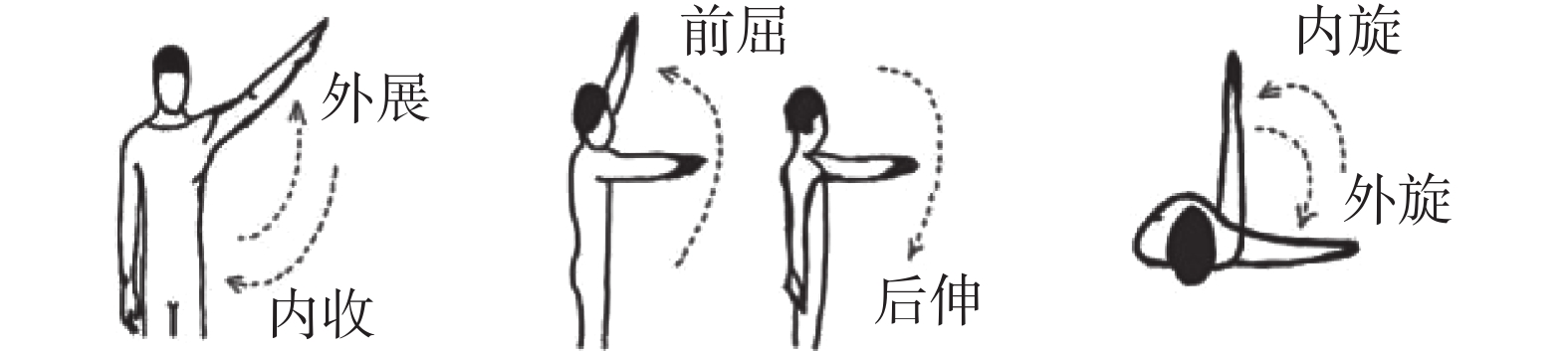
根據人體肩關節生物力學特征[13-14],肩關節由鎖骨、肱骨及肩胛骨組成,屬于一種典型球窩關節,可以進行多軸性靈活運動。肩關節運動具體可分解為 3 種正交運動:冠狀面內的外展/內收、矢狀面的前屈/后伸和水平面的內旋/外旋[15]。運動示范如圖 1 所示。
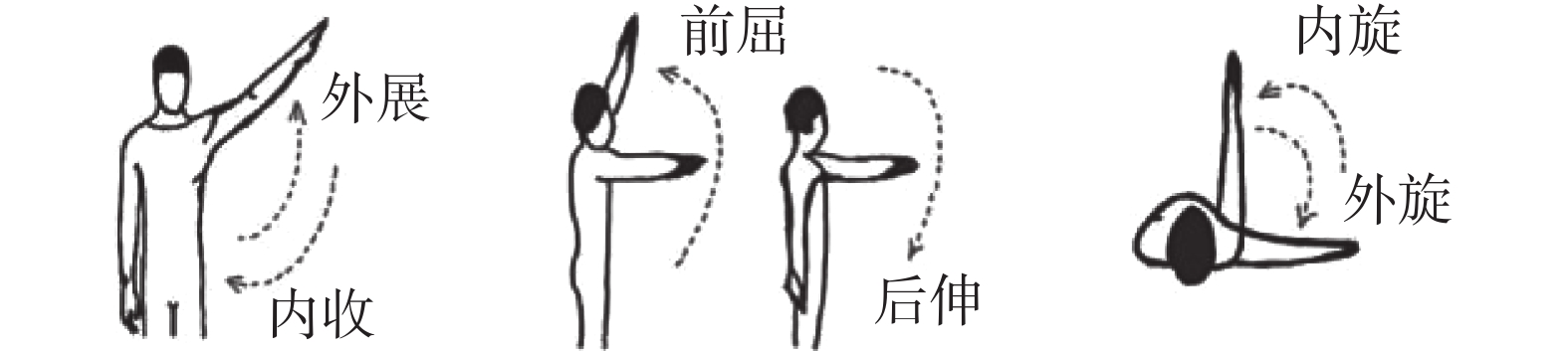 圖1
肩關節 3 種正交運動示范
Figure1.
Demonstration of three orthogonal movements of the shoulder joint
圖1
肩關節 3 種正交運動示范
Figure1.
Demonstration of three orthogonal movements of the shoulder joint
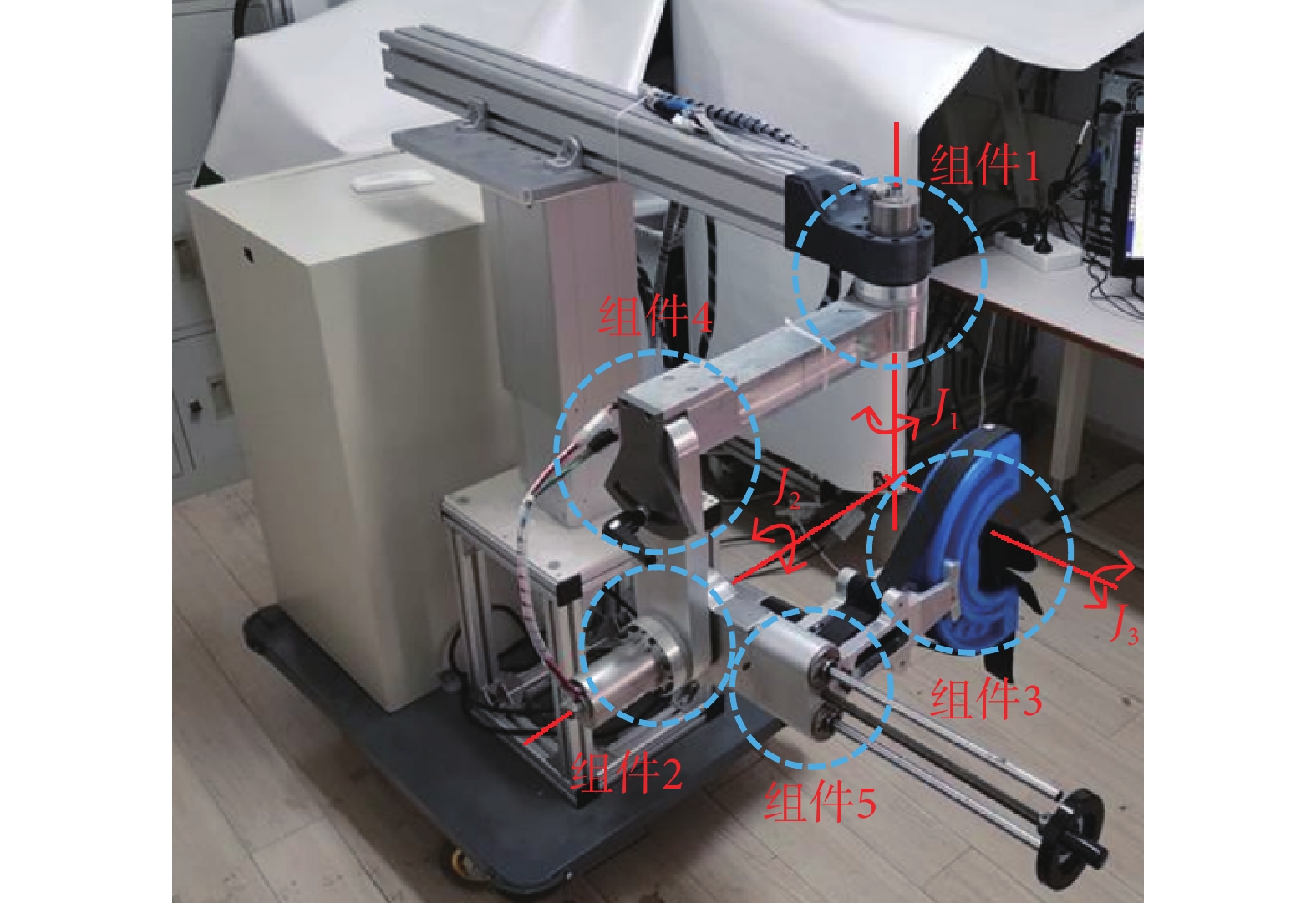
根據上述人體肩關節運動生物力學分解,本文研制了一款外骨骼式肩關節康復機器人,其結構如圖 2 所示。所研制肩關節康復機器人采用了串聯的三個正交轉動關節 J1、J2 和 J3,分別如圖 2 所示組件 1、組件 2 與組件 3 的位置,以實現肩的球關節運動。其中,組件 3 是半圓形外骨骼結構,可通過束縛帶固定患者上肢;組件 4 被設計為一個可調節的被動關節,通過旋轉旋鈕調節角度并使用旋擰固定;組件 5 為可手動調節長度的連桿,用來適應不同臂長的人體上肢。同時為了滿足不同人的坐高,設計將機器人固定在可升降底座上。此結構整體可滿足不同體型的人體使用。
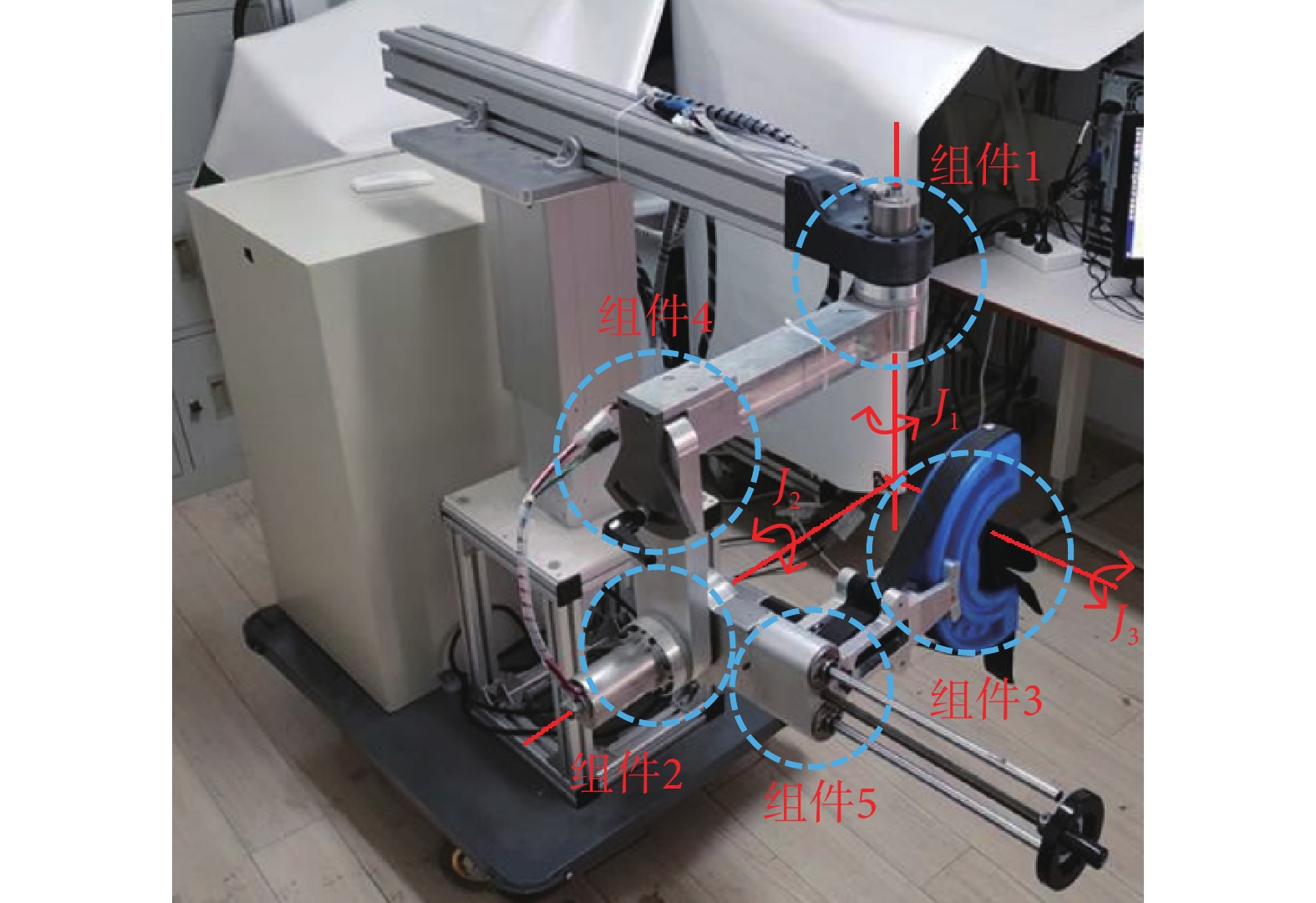 圖2
外骨骼式肩關節康復機器人機械結構
Figure2.
Mechanical structure of exoskeleton shoulder joint rehabi litation robot
圖2
外骨骼式肩關節康復機器人機械結構
Figure2.
Mechanical structure of exoskeleton shoulder joint rehabi litation robot
2 自適應調節助力的鏡像康復訓練控制算法設計
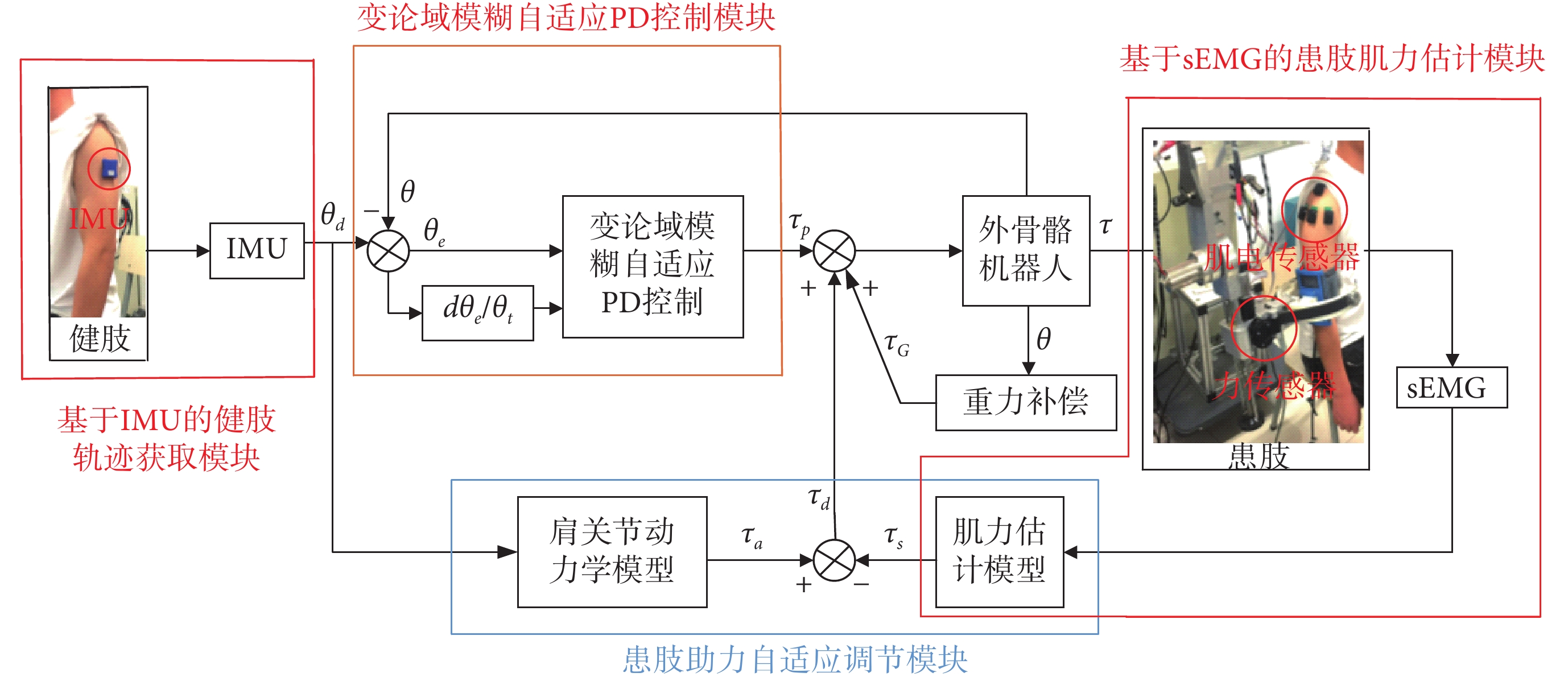
為了在鏡像康復訓練時最大程度地訓練患肢肌力,本文使用上述外骨骼式肩關節康復機器人作為實驗平臺,提出了一種自適應調整助力的鏡像康復訓練控制方法。控制策略示意圖如圖 3 所示,主要是由基于 IMU 的健肢軌跡獲取、變論域模糊自適應比例微分(proportion differentiation,PD)控制、基于表面肌電信號(surface electromyography,sEMG)的患肢肌力估計以及患肢助力自適應調節四個部分組成。
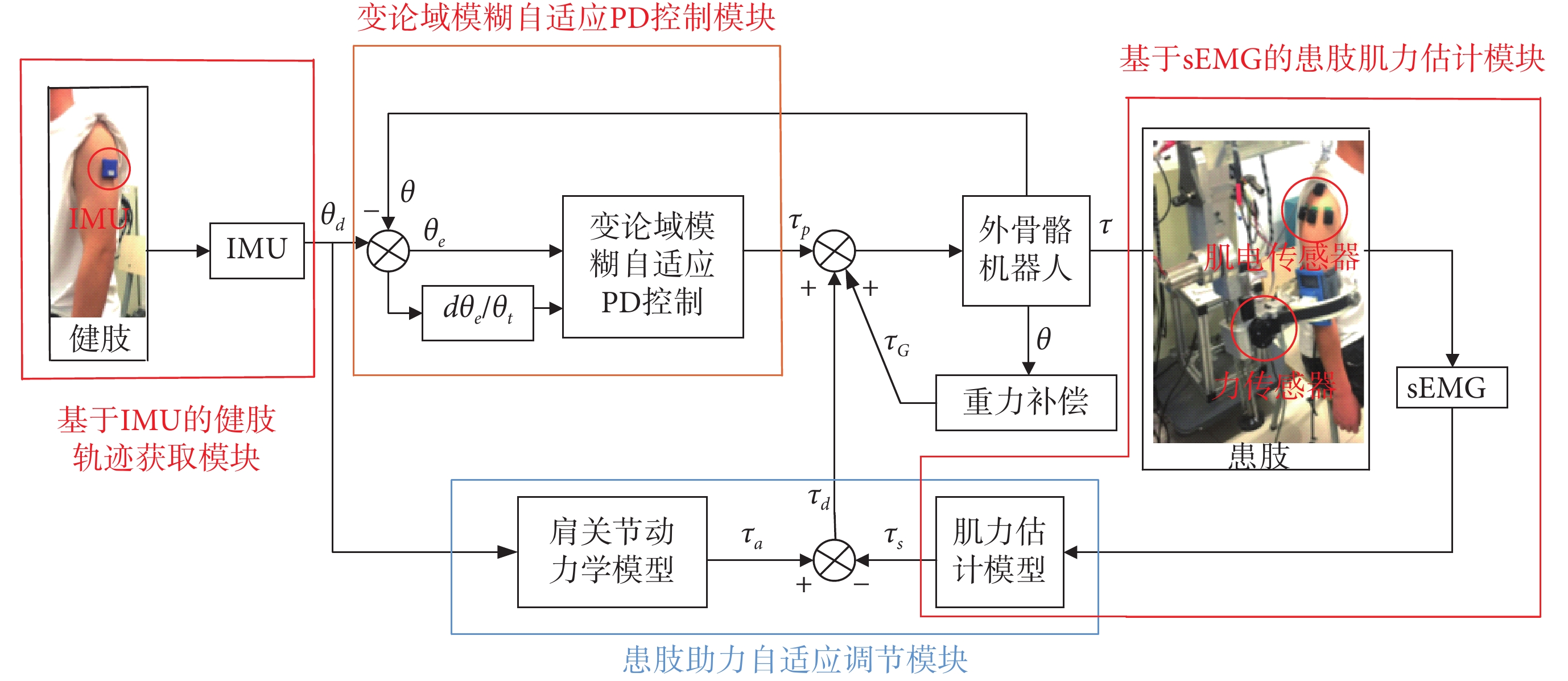 圖3
自適應調節助力的鏡像康復訓練控制策略
Figure3.
Control strategy of mirror-type rehabilitation training with adaptive adjustment assistance
圖3
自適應調節助力的鏡像康復訓練控制策略
Figure3.
Control strategy of mirror-type rehabilitation training with adaptive adjustment assistance
2.1 基于 IMU 的健肢軌跡獲取
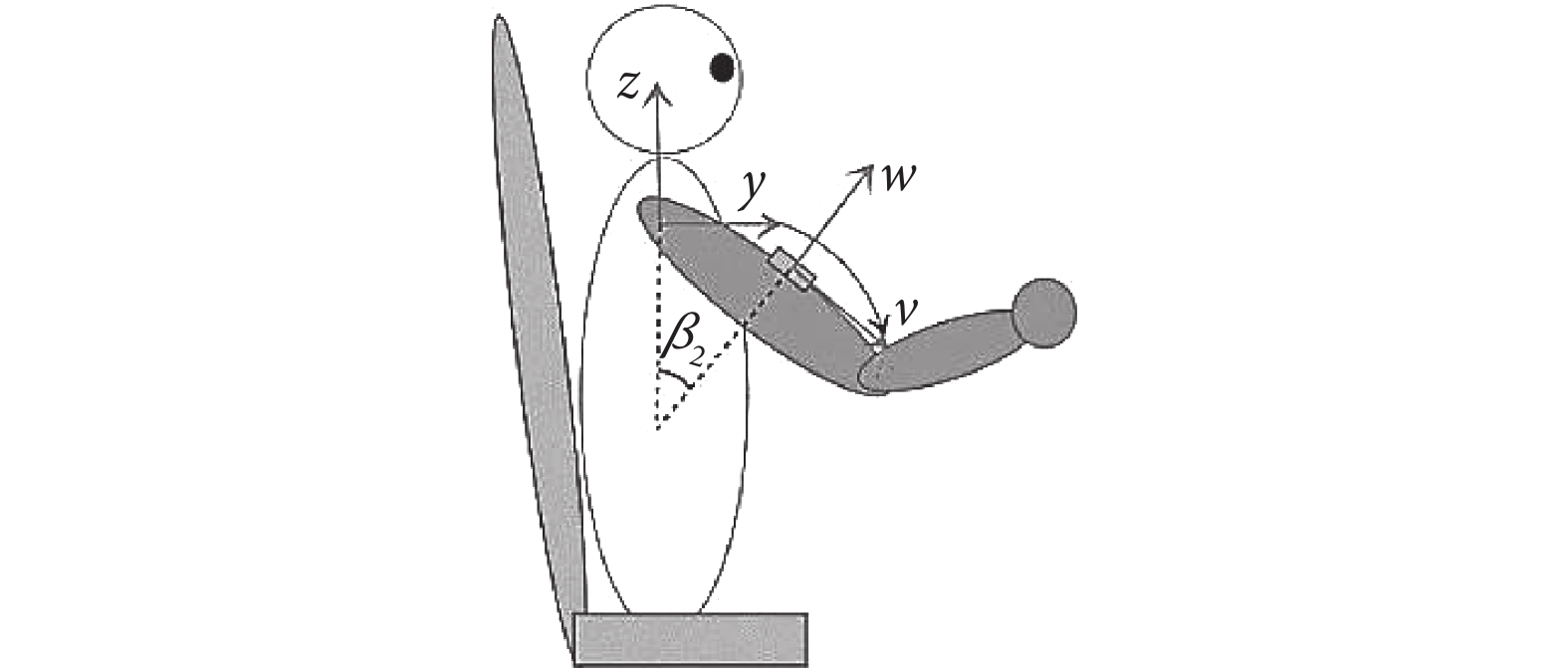
本系統采用 IMU 來捕捉健肢的肩關節運動軌跡,這里需要對 IMU 提供的原始信息向肩關節坐標系進行坐標轉換[16]。如圖 4 所示將 IMU 佩戴于上肢大臂內側,同時設定 IMU 座標系為 Ouvw,肩關節座標系為 Oxyz。
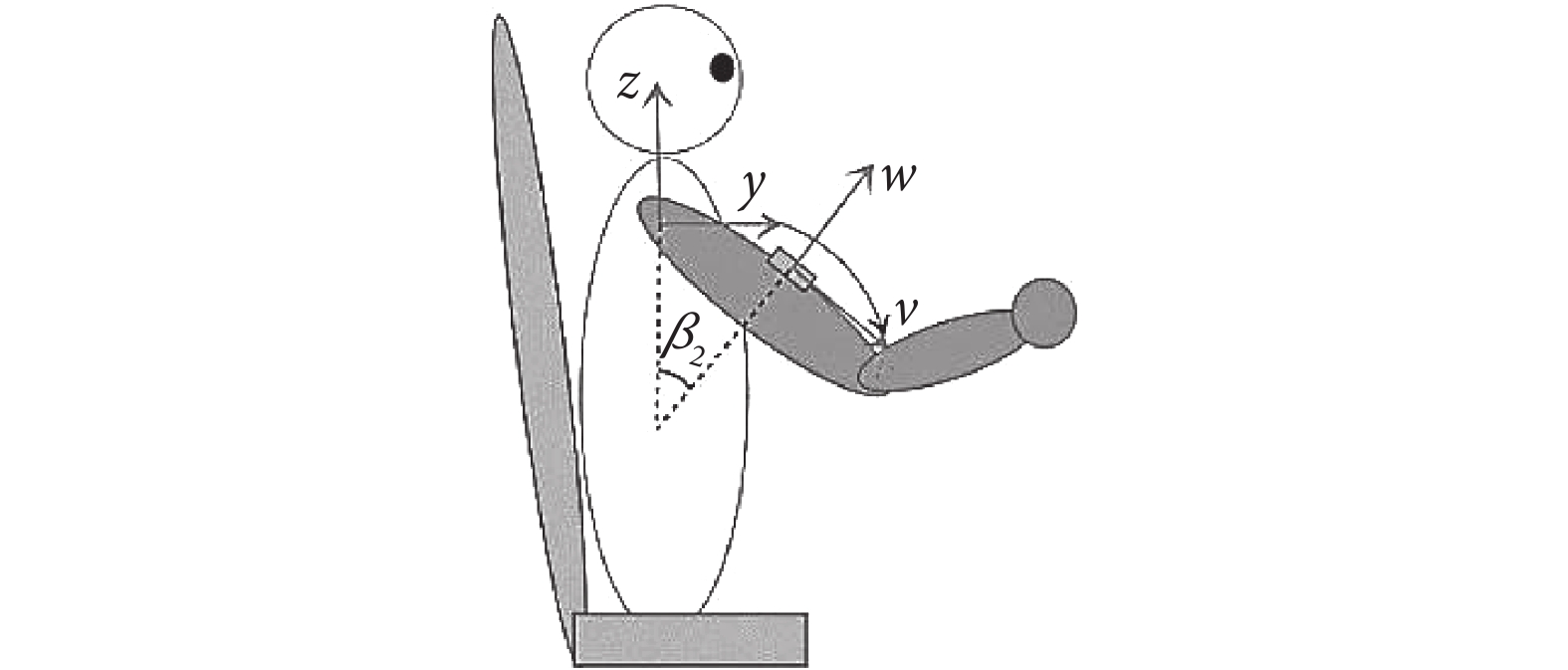 圖4
IMU 坐標系與肩關節坐標系定義
Figure4.
Definition of IMU coordinate system and shoulder joint coordinate system
圖4
IMU 坐標系與肩關節坐標系定義
Figure4.
Definition of IMU coordinate system and shoulder joint coordinate system
所有相關原始坐標數據關節都可以通過旋轉矩陣 RT 得到新位置向量,旋轉矩陣 RT 求法如下:設 Oxyz 有一固定點 M,其在 Ouvw、Oxyz 的位置向量分別為  和
和  ,則
,則
 |
 |
其中 iu、jv、kw 是 IMU 基坐標系的標準正交基;ix、jy、kz 是肩關節基坐標系的標準正交基。固定點 M 在肩關節坐標系中的位置向量恒為  ,而該點在 IMU 坐標系中的位置向量
,而該點在 IMU 坐標系中的位置向量  分別在 iu、jv、kw 方向上的投影可表示為:
分別在 iu、jv、kw 方向上的投影可表示為:
 |
根據旋轉變換性質可知 R 是正交矩陣,則有 R? 1 = RT,RT即為旋轉變換矩陣。
肩關節在空間位置信息即肩關節坐標系與 IMU 坐標系之間的相對關系可以選擇的輸出數據形式有:歐拉角、四元數、旋轉矩陣等[17]。本文選用歐拉角描述的姿態進行輸出。IMU 輸出的歐拉角為 Aroll、Apitch、Ayaw,它的旋轉矩陣就是肩關節坐標系 Oxyz 相當于 IMU 坐標系 Ouvw 的變換矩陣。綜合定義與 IMU 安裝方式,可通過 IMU 測得健肢肩關節實時運動關節角度,肩關節外展內收角  ,肩關節屈伸角
,肩關節屈伸角  ,肩關節內外旋角
,肩關節內外旋角  。
。
2.2 變論域模糊自適應 PD 控制
機器人系統是一種復雜的非線性強耦合動態系統,傳統模糊比例積分微分控制器只適用于具有模糊環境的粗糙控制場合,對于高精度的控制問題,模糊控制的效果不理想[18]。所以本系統選用變論域模糊自適應 PD 控制,在規則形式不變的前提下,論域隨著誤差的變小而收縮,從而提高了控制精度。
本系統采用的變論域模糊自適應 PD 控制器的輸入為健肢肩關節軌跡獲取的角度信號差值  與此差值的變化率
與此差值的變化率  ,將這兩個值的初始模糊論域分為 6 級,即
,將這兩個值的初始模糊論域分為 6 級,即  和
和  ,變論域模糊自適應 PD 控制器的輸出為機器人的控制力矩
,變論域模糊自適應 PD 控制器的輸出為機器人的控制力矩  ,其輸出力矩的論域可表示為
,其輸出力矩的論域可表示為 
 。通過
。通過  和
和 
 建立模糊生產器[19]:
建立模糊生產器[19]:
 |
 |
其中  和
和  分別表示角度信號差
分別表示角度信號差  論域的最小值和最大值,
論域的最小值和最大值, 和
和  分別表示角度信號差的變化率
分別表示角度信號差的變化率  論域的最小值和最大值,E 和 CE 為模糊生產器的輸出。
論域的最小值和最大值,E 和 CE 為模糊生產器的輸出。
根據自適應 PD 控制率設計模糊規則如下:
 |
 |
 |
其中  、
、 為 PD 控制器的最終控制參數,
為 PD 控制器的最終控制參數, 、
、 為 PD 控制器的初始整定參數,
為 PD 控制器的初始整定參數, 、
、 為模糊控制器輸出量,
為模糊控制器輸出量, 、
、 為修正系數。
為修正系數。
通過隸屬度最大值方法進行控制的模糊消除,直接選擇輸出模糊子集的隸屬度函數峰值作為輸出的確定值,輸出模糊子集  的邏輯“并”為:
的邏輯“并”為: ,通過取中值反求控制變量
,通過取中值反求控制變量  的精確輸出[20]。然后逐漸縮小角度信號差
的精確輸出[20]。然后逐漸縮小角度信號差  和其變化率
和其變化率  的論域,可確定縮小后的
的論域,可確定縮小后的  、
、 以及輸出力矩
以及輸出力矩  的論域,分別為:
的論域,分別為:
 |
 |
 |
其中  、
、 、
、 分別為相應論域的伸縮因子。
分別為相應論域的伸縮因子。
2.3 基于 sEMG 的患肢肌力估計
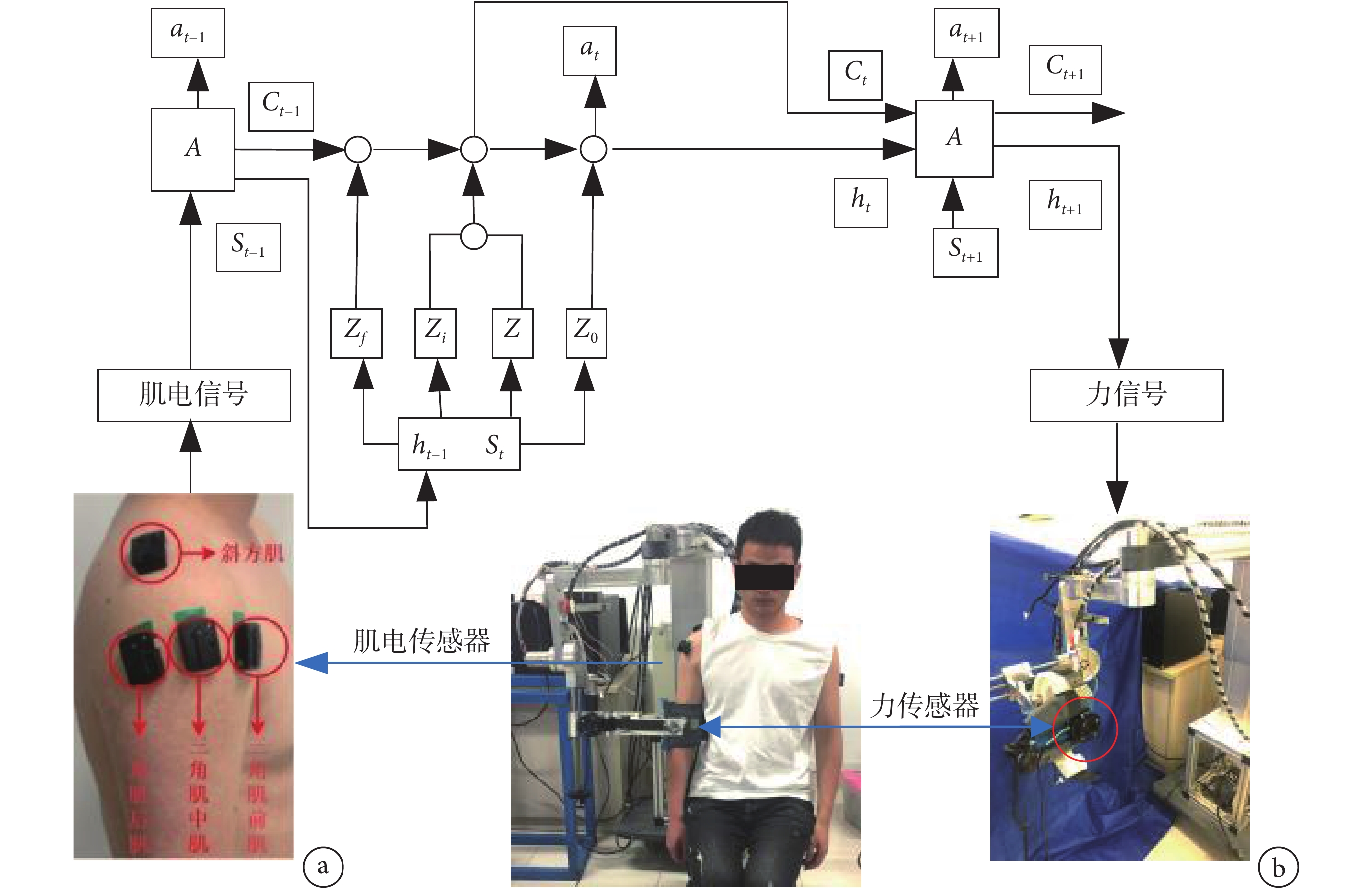
采用 Delsys 表面肌電儀來采取非入侵式 sEMG,其形式簡單且對受試者沒有傷害。在鏡像康復訓練中將屈曲/伸展、外展/內收和內旋/外旋三組肩關節基本運動自由度作為手臂動作模式。參考肩關節運動時相關肌肉收縮的情況,結合人體解剖結構學[21],選取與肩關節動作最相關的肌肉——三角肌前肌、三角肌后肌、三角肌中肌和斜方肌,并在對應肌肉位置佩戴表面肌電傳感器,如圖 5a所示。
 圖5
肩關節力估計流程圖
圖5
肩關節力估計流程圖
a. 肌電傳感器安裝方式;b. 力傳感器安裝方式
Figure5. Flow chart for estimating the force of the shoulder jointa. the installation method of sEMG sensor; b. the installation method of force sensor
要完成基于 sEMG 的肌力估計,需采集肩關節處肌肉發力過程中的力信號作為參考數據[22],本文采用 ROBOTIQ FT300 六維力傳感器進行采集。為了便于后續實驗,此力傳感器使用自帶軟件進行重力補償。在實驗過程中將力傳感器置于機器人組件 3 中用于固定患肢的部件上,具體安裝位置如圖 5b所示。在此過程中實時采集受試者肩關節 4 個部位的 sEMG(用 X 表示)與力信號(用 F 表示),sEMG 選用時域方法進行特征提取得到特征矩陣 XF,將 XF 與 F 構成樣本 Sm。長短期記憶網絡(long short-term memory,LSTM)對輸入網絡的 XF 進行非線性映射得到受試者肩關節力的估計值。
 |
 |
 |
式中 X1~X4 分別是第 1~4 個肌電傳感器采集到的 4 路 sEMG,Fx、Fy、Fz 分別是力傳感器在 x、y、z 方向上檢測到的力信號,m 為采樣點的個數。
利用肌電傳感器和力傳感器采集到 sEMG 和力信號后,通過循環神經網絡(recurrent neural network,RNN)訓練完成對患肢的肌力估計,傳統的 RNN 存在依賴性問題,而 LSTM 是一種時間循環神經網絡,可有效契合人體 sEMG 的時變特點[23]。所以此系統將采集到的 sEMG 特征值和力信號代入 LSTM 中來識別患肢肌力,其流程如圖5 所示。在 LSTM 網絡中,輸出動作的選擇主要有三個階段:一是忘記階段,用計算出的 Zf 來作為遺忘門,來控制上一狀態 Ct-1 需要遺忘和記住的狀態 St-1;二是選擇記憶階段,對輸入 St 進行選擇記憶,如果能獲得較高的獎賞值,則著重記錄下來,反之則少記一些,由于 RNN 是時序的,所以當前的輸入內容為當前時刻的狀態,由 Zi 來作為控制選擇的門控信號;三是輸出階段,通過 Z0 來控制哪些將會被當成當前狀態的輸出動作,同時對上一階段得到的 Ct-1 通過 tanh 激活函數進行縮放變化。這里主要是通過同步獲取的患肢肩關節處肌肉發力過程中的力信號和肩部肌肉 sEMG 特征值作為 LSTM 的訓練樣本輸入,對 LSTM 進行訓練。而后對所建立的肌力估計模型采用肩關節處肌肉發力過程中的力信號作為 LSTM 的訓練樣本輸出進行測試。訓練后的 LSTM 可通過 sEMG 特征值來估計關節力輸出,并根據力傳感器到肩關節的距離進一步得到力矩  。
。
2.4 患肢助力自適應調節
將 2.1 節中利用 IMU 捕捉健肢的運動軌跡作為鏡像訓練中患肢跟隨的鏡像期望軌跡,并通過上臂長為 l、質量為 m 的健肢上臂建立肩關節動力學模型,IMU 實時采集到的肩關節角度為  ,則可求得此系統的動能 E1 和勢能 E2,可表示為:
,則可求得此系統的動能 E1 和勢能 E2,可表示為:
 ,
, ,其中 g 為重力加速度。
,其中 g 為重力加速度。
根據拉格朗日方程可得:
 |
其中  ,
, 為患肢跟隨健肢肩關節運動的期望力矩。肩關節運動學模型可由拉格朗日方程寫成矩陣形式,可表示為:
為患肢跟隨健肢肩關節運動的期望力矩。肩關節運動學模型可由拉格朗日方程寫成矩陣形式,可表示為:
 |
其中  為慣性矩陣;
為慣性矩陣; 為離心力和哥氏力矢量;
為離心力和哥氏力矢量; 重力矢量。則患肢跟隨健肢肩關節運動的期望力矩
重力矢量。則患肢跟隨健肢肩關節運動的期望力矩  與患肢的發力力矩
與患肢的發力力矩  的差值定義為康復機器人需對患肢補償的力矩
的差值定義為康復機器人需對患肢補償的力矩  。同時引入重力補償環節,重力補償力矩為
。同時引入重力補償環節,重力補償力矩為  。最終得到的康復機器人關節總力矩為變論域模糊自適應 PD 控制、患肢助力補償和重力補償環節的力矩和:
。最終得到的康復機器人關節總力矩為變論域模糊自適應 PD 控制、患肢助力補償和重力補償環節的力矩和:
 |
3 實驗與結果分析
3.1 肩關節力估計實驗
肩關節力估計實驗是將外骨骼式肩關節康復機器人作為實驗平臺,選擇一名健康受試者,受試者右上肢模擬患肢穿戴康復機器人,按 2.3 節中的固定方式將六維力傳感器固定在機器人上,并在患肢對應肌肉位置佩戴 sEMG 采集裝置,同步獲取其肩關節處肩部肌肉發力過程中的力信號和 sEMG。設置 sEMG 采集裝置采樣頻率為 2 000 Hz、采樣時間(分別執行矢狀面前屈/后伸、水平面前屈/后伸兩組動作所用時間)為 30 s,采集執行上述兩組發力動作時肩關節運動相關肌肉的 sEMG 信號,并采用肌力估計效果較好的絕對值均值(mean absolute value,MAV)時域特征提取方法[22]提取肌電特征值。在使用力傳感器采集肩關節力信號之前進行校零工作。
受試者患肢依靠肩部依次做出矢狀面前屈/后伸和水平面前屈/后伸四個方向的發力動作,分別對應力傳感 z 軸正/負方向和 x 軸正/負方向。采集肩關節運動過程中的 sEMG 和力信號,將這兩個信號作為 LSTM 的訓練樣本輸入,訓練后的 LSTM 通過 sEMG 特征值來估計肩關節力輸出。
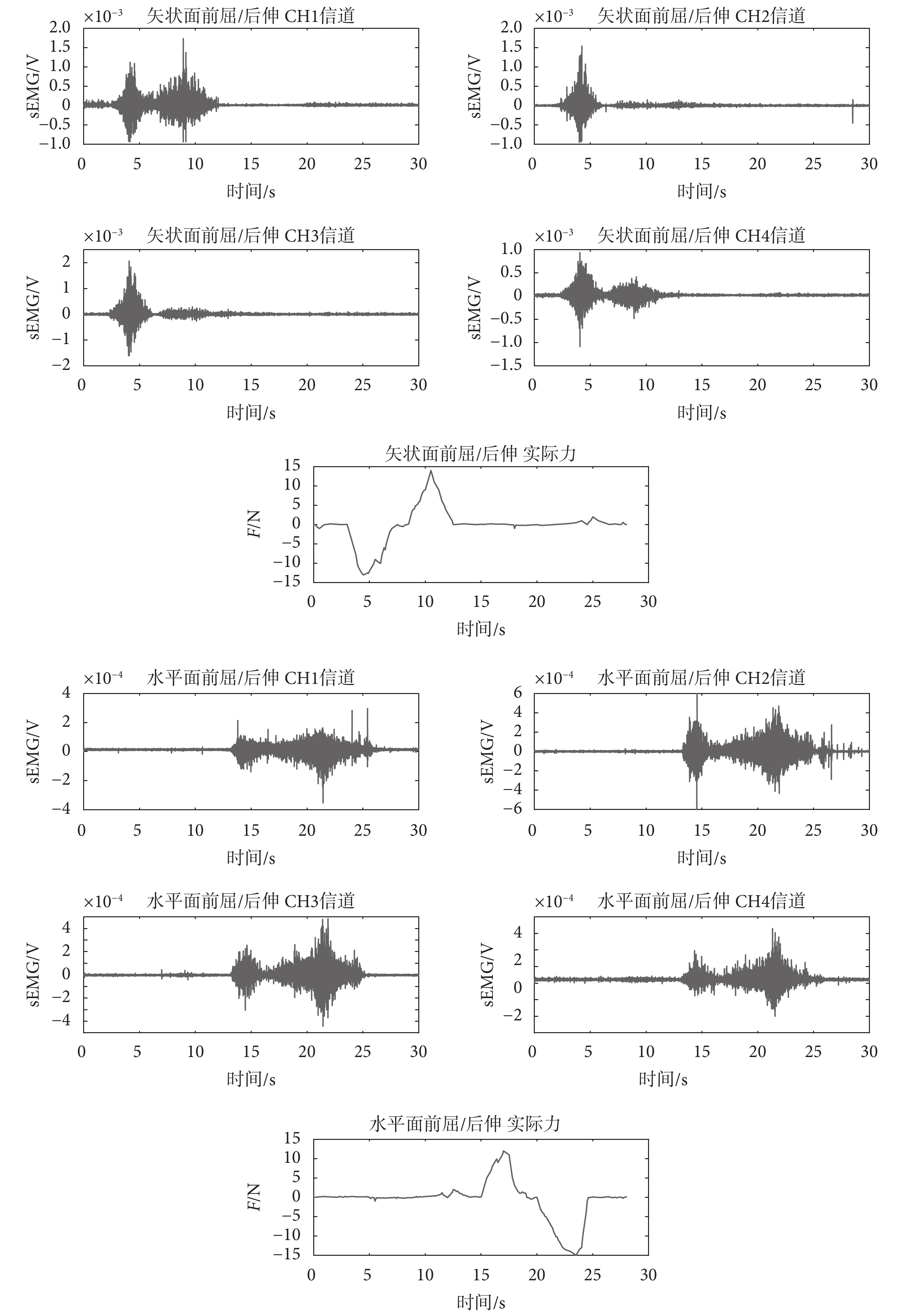
指令受試者患肢伸直置于體側為起始位,康復機器人協助患肢做矢狀面后伸再回起始位、矢狀面前屈再回起始位的發力動作,即完成矢狀面前屈/后伸;指令受試者患肢伸直側平舉為起始位,康復機器人協助患肢做水平面前屈再回起始位、水平面后伸再回起始位的發力動作,即完成水平面前屈/后伸。將矢狀面前屈/后伸和水平面前屈/后伸兩組發力動作分別重復 20 次,選擇 10 次作為訓練樣本,剩余 10 次作為測試樣本。圖 6 所示為受試者執行上述兩組動作時所測得的 sEMG 與力信號。圖 7 所示受試者肩關節力估計實驗結果。
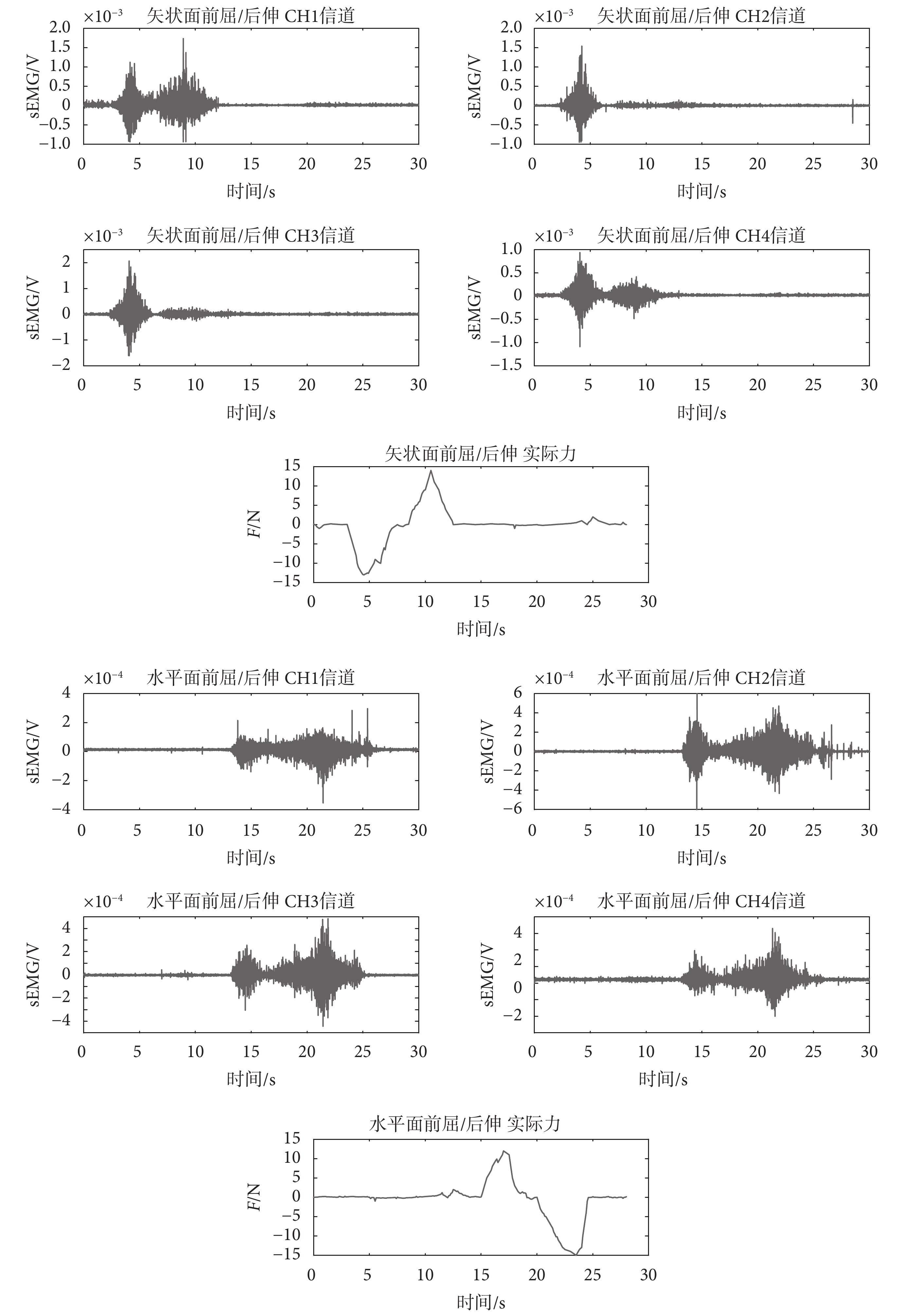 圖6
肩關節 sEMG 及力信號
Figure6.
sEMG signals and force signals of shoulder joint
圖6
肩關節 sEMG 及力信號
Figure6.
sEMG signals and force signals of shoulder joint
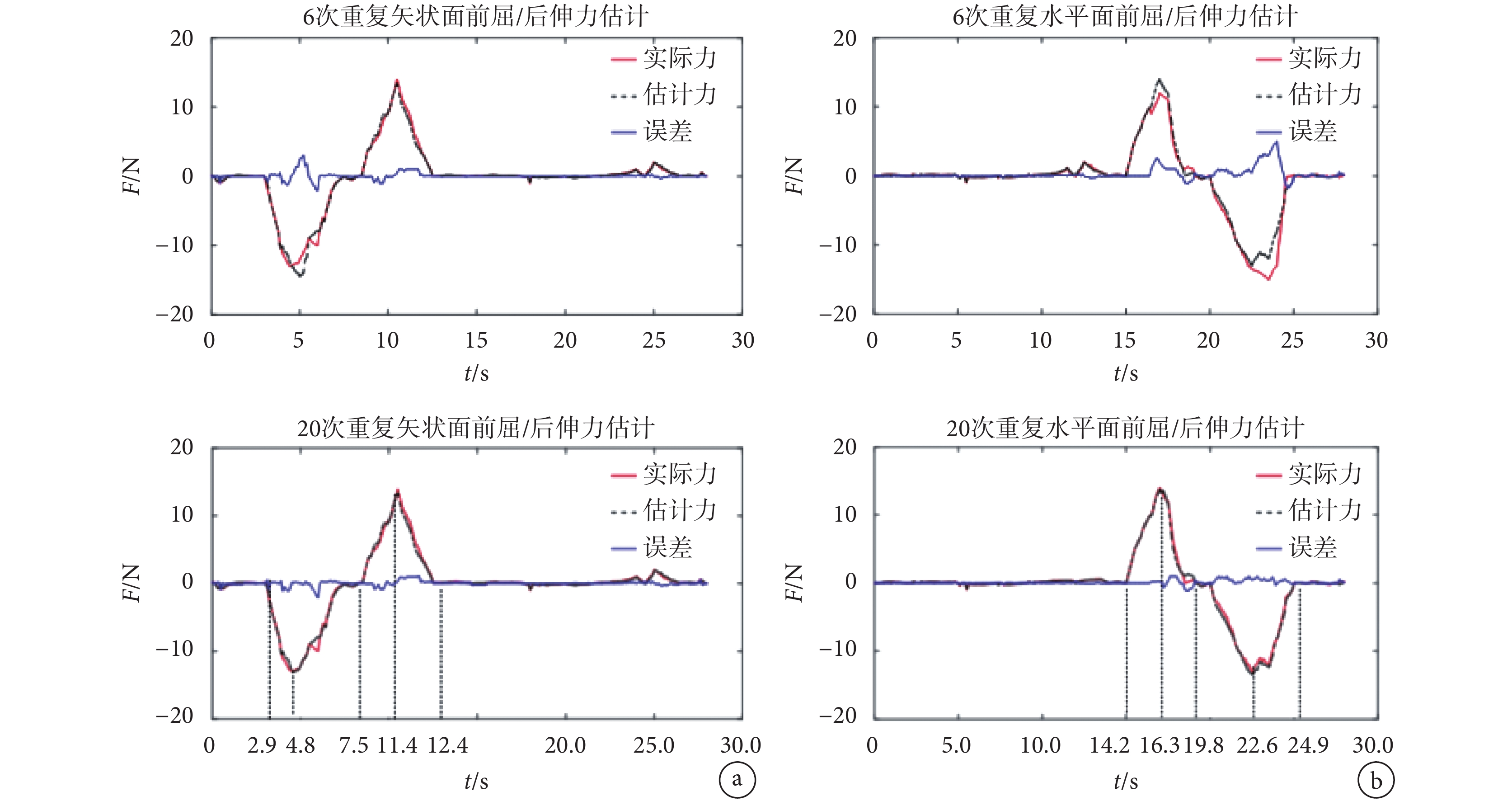
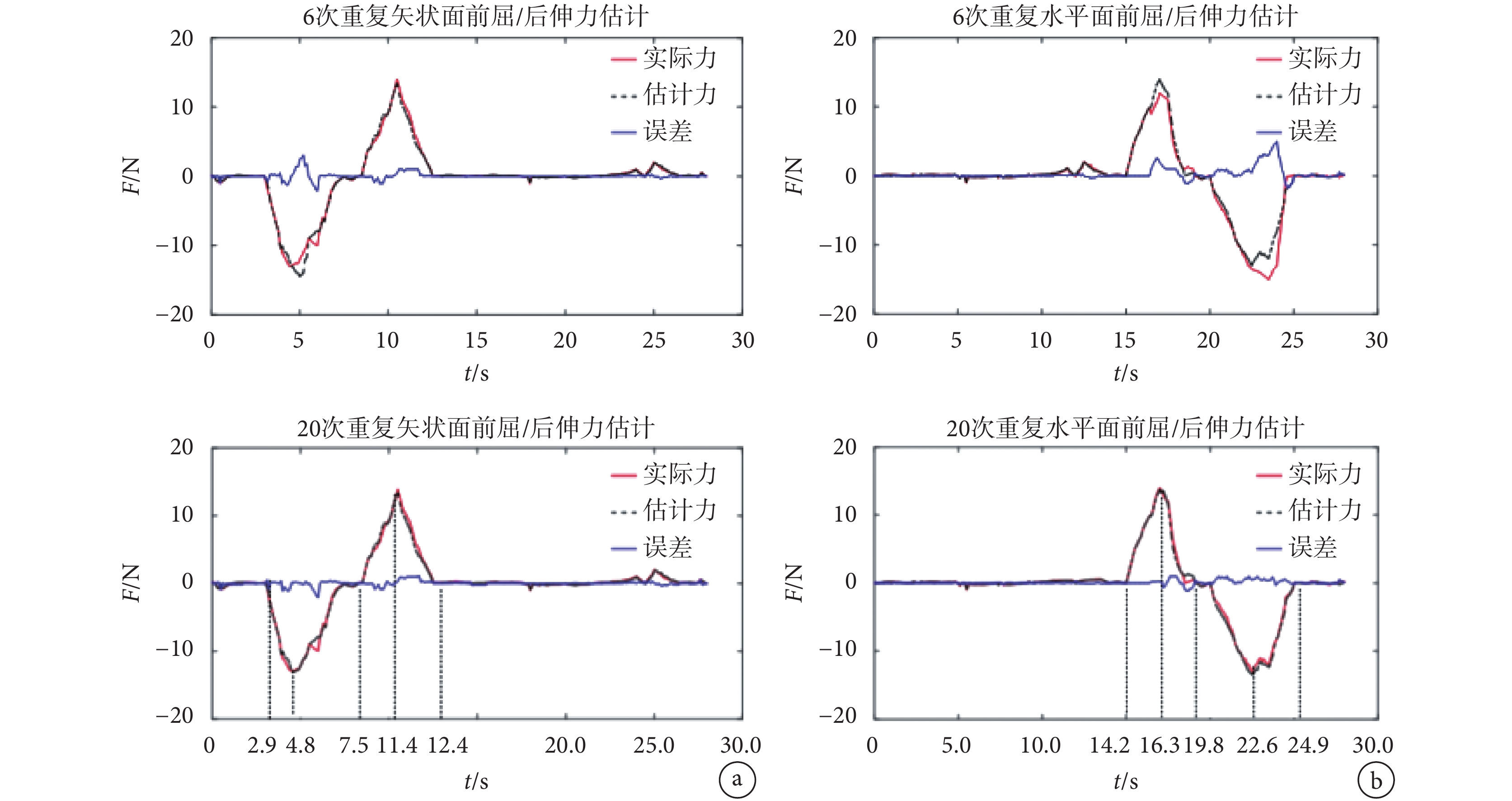 圖7
肩關節力估計實驗
圖7
肩關節力估計實驗
a. 肩關節矢狀面前屈/后伸力估計;b. 肩關節水平面前屈/后伸力估計
Figure7. Experiments for estimating shoulder joint forcea. experiments for estimating shoulder joint force of anteflexion/extension in the direction of sagittal planes; b. experiments for estimating shoulder joint force of anteflexion/extension in the direction of horizontal planes
圖 7 中實線表示通過六維力傳感器測量的患肢肩關節肌力,為實際值;虛線表示通過 sEMG 特征信息估計的肌力大小,為估計值。其中圖 7a 是指令受試者分別執行 6 次與 20 次肩關節矢狀面前屈/后伸運動進行力估計,以重復執行 20 次發力動作為例可以分為四個階段:① 起始位-矢狀面后伸:在 2.9~4.8 s 內,受試者患肢從起始位做矢狀面后伸的發力動作,患肢肌力反方向增長;② 矢狀面后伸-起始位:在 4.8~7.5s 內,受試者患肢做矢狀面后伸回到起始位的發力動作,患肢肌力反方向減小;③ 起始位-矢狀面前屈:在 7.5~11.4 s 內,受試者患肢從起始位做矢狀面前屈的發力動作,患肢肌力正方向增長;④ 矢狀面前屈-起始位:在 11.4~12.4 s 內,受試者患肢做矢狀面前屈回到起始位的發力動作,患肢肌力正方向減小。計算在這四個階段中肩關節矢狀面前屈/后伸方向上力的測量值的標準差(root mean square,RMS)為 0.76 N、殘差絕對值均值(mean absolute value of the error,MAVE)為 0.28 N。通過比較分別執行 6 次與 20 次指定發力動作估計值與實際值的誤差,可以看出 20 次重復試驗后的誤差明顯小于 6 次重復試驗,表明訓練后的 LSTM 網絡可以較準確地估計出患肢真實距離。圖 7b 是指令受試者分別執行 6 次與 20 次肩關節矢狀面前屈/后伸運動進行力估計,同樣也以重復 20 次發力動作為例分為四個階段:① 起始位-水平面前屈:在 14.2~16.3 s 內,受試者患肢從起始位做水平面前屈的發力動作,患肢肌力正方向增長;② 水平面前屈-起始位:在 16.3~19.8 s 內,受試者患肢做水平面前屈回到起始位的發力動作,患肢肌力正方向減小;③ 起始位-水平面后伸:在 19.8~22.6 s 內,受試者患肢從起始位做水平面后伸的發力動作,患肢肌力反方向增長;④ 水平面后伸-起始位:在 22.6~24.9 s 內,受試者患肢做水平面后伸回到起始位的發力動作,患肢肌力反方向減小。在這四個階段內計算出的肩關節水平面前屈/后伸方向上力的測量值的 RMS=0.79 N、MAVE=0.41 N。通過比較分別執行 6 次與 20 次指定發力動作估計值與實際值的誤差,同樣可以看出 20 次重復試驗后的誤差明顯小于 6 次重復試驗,表明訓練后的 LSTM 網絡可以較準確地估計出患肢真實距離。以上結果顯示,計算出的肩關節矢狀面前屈/后伸和水平面前屈/后伸方向上力與測量值的 RMS 和 MAVE 均不大于 1 N,結合圖 7a 和圖 7b 的實際值和估計值曲線,可以看出通過 sEMG 特征值估計的肩關節力輸出能較好地反映通過力傳感器測量的肩關節真實肌力大小。
3.2 鏡像康復訓練實驗
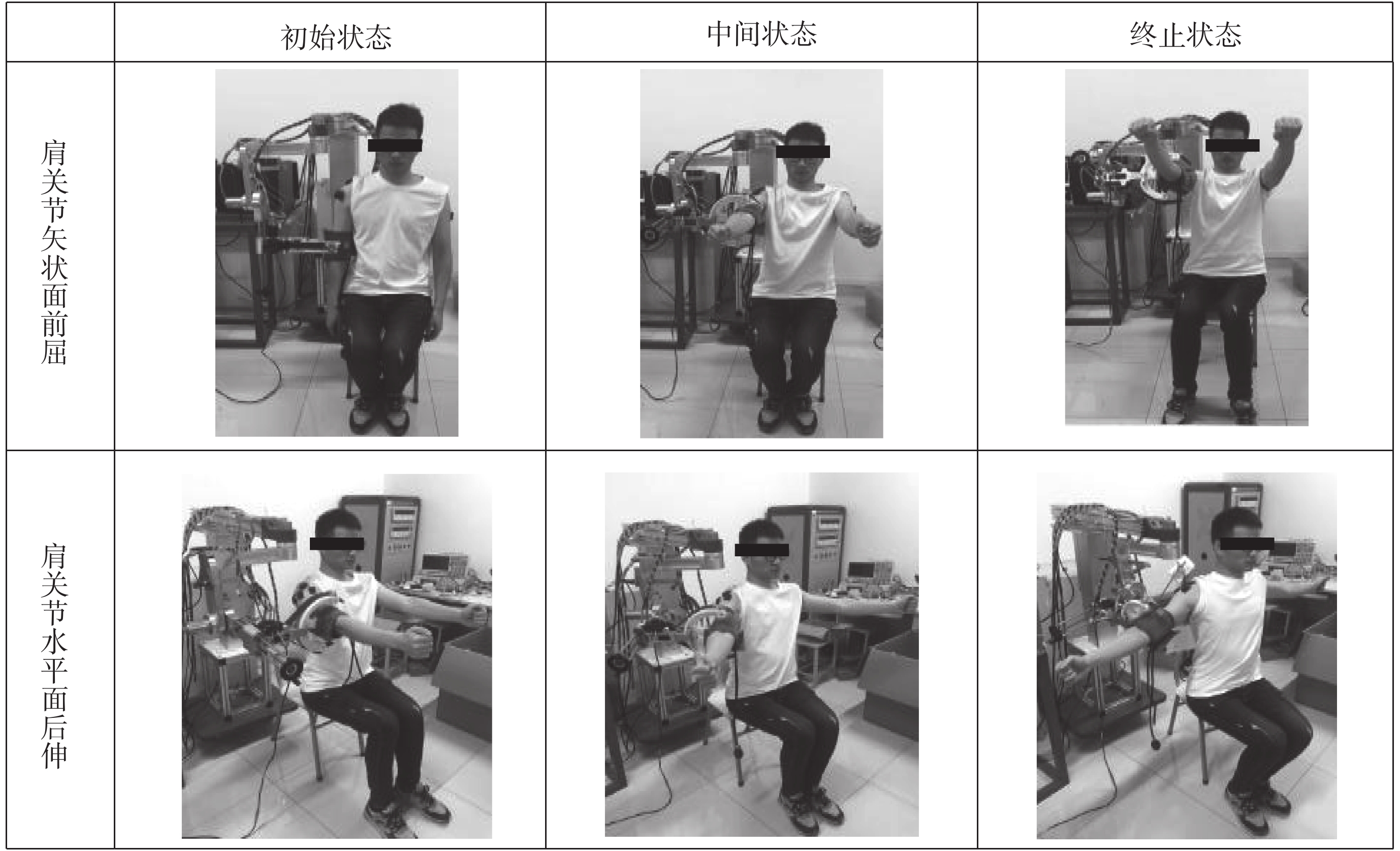
同樣鏡像康復訓練實驗也是將外骨骼式肩關節康復機器人作為實驗平臺,將六維力傳感器固定在機器人上。受試者左上肢作為健肢佩戴 IMU,右上肢模擬患肢穿戴康復機器人,并佩戴 sEMG 采集裝置。在此過程中設置 sEMG 采集裝置采樣頻率為 2 000 Hz,在執行矢狀面前屈動作時采樣時間為 8 s,在執行水平面后伸動作時采樣時間為 5 s,采集執行肩關節矢狀面前屈、水平面后伸兩組動作時患肢肩關節的 sEMG 信號并提取其特征值,力傳感器校零后再采集患肢肩關節力信號。指令受試者健肢與患肢伸直置于體側為起始位,健肢盡量保持勻速做肩關節矢狀面前屈的發力動作,患肢在不發力或用力少于健肢的情況下跟隨健肢做鏡像方向的不完全發力,完成健患肢肩關節矢狀面前屈實驗;同樣指令受試者健肢與患肢伸直前平舉為起始位,健肢盡量保持勻速做肩關節水平面后伸的發力動作,患肢在不發力或用力少于健肢的情況下跟隨健肢做鏡像方向的不完全發力,完成健患肢肩關節水平面后伸實驗。具體如圖 8 所示。
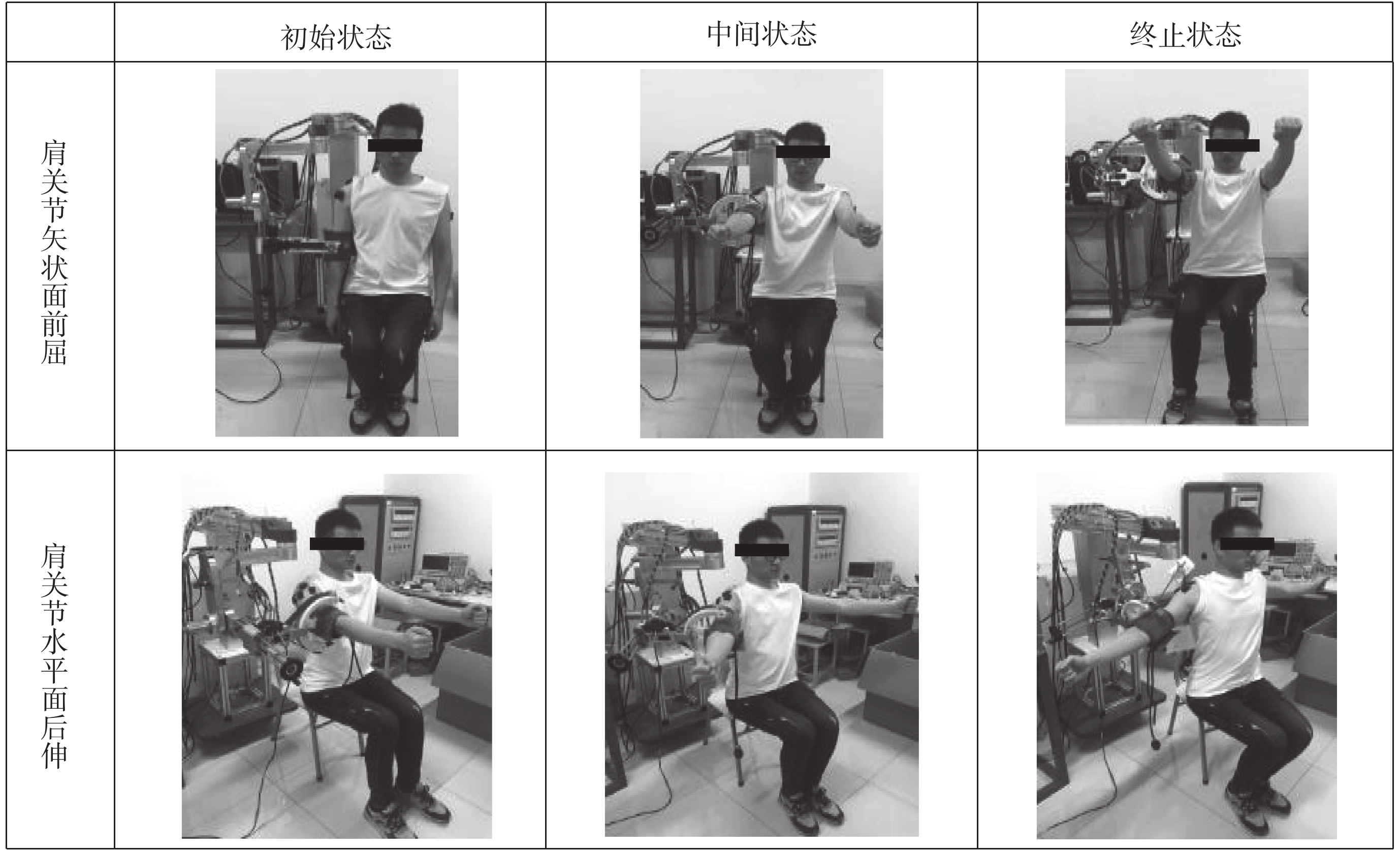 圖8
健患肢肩關節矢狀面前屈、水平面后伸實驗
Figure8.
Experiment of sagittal anterior flexion and horizontal extension of the shoulder joints of healthy and affected limbs
圖8
健患肢肩關節矢狀面前屈、水平面后伸實驗
Figure8.
Experiment of sagittal anterior flexion and horizontal extension of the shoulder joints of healthy and affected limbs
在執行這兩組康復動作的過程中,通過 IMU 采集健肢運動軌跡并代入肩關節動力學模型可求得健肢力矩  。然后通過同步采集患肢 sEMG 和力信號并代入 3.1 節中的肌力估計模型中可求得患肢估計力矩
。然后通過同步采集患肢 sEMG 和力信號并代入 3.1 節中的肌力估計模型中可求得患肢估計力矩  。兩者之差即為可對患肢自適應調節的補償力矩
。兩者之差即為可對患肢自適應調節的補償力矩  。實驗結果如圖 9 所示。
。實驗結果如圖 9 所示。
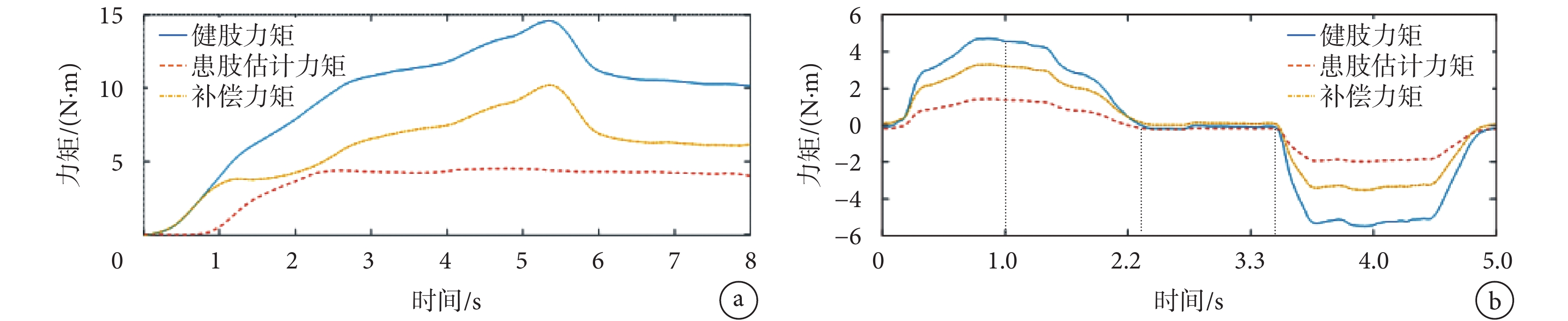
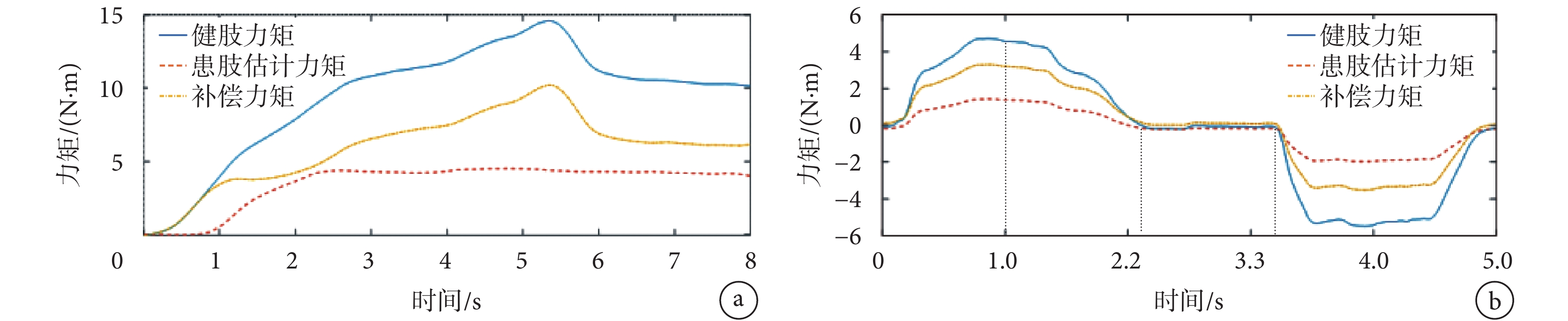 圖9
患肢自適應補償力矩
圖9
患肢自適應補償力矩
a. 肩關節矢狀面前屈運動方向力矩;b. 肩關節矢狀面后伸運動方向力矩
Figure9. Adaptive compensation torque of the moment of the affected limba. the torque of anteflexion of the shoulder joint in the direction of sagittal planes; b. the torque of extension of the shoulder joint in the direction of sagittal planes
圖 9 中藍色實線表示健肢力矩  ,紅色虛線表示患肢估計力矩
,紅色虛線表示患肢估計力矩  ,黃色虛線表示可對患肢自適應調節的補償力矩
,黃色虛線表示可對患肢自適應調節的補償力矩  。圖 9a 表示的是健患肢同時執行肩關節矢狀面前屈運動時,健肢力矩
。圖 9a 表示的是健患肢同時執行肩關節矢狀面前屈運動時,健肢力矩  、患肢估計力矩
、患肢估計力矩  以及患肢補償力矩
以及患肢補償力矩  的變化曲線。可看出健肢因需要克服自身重力,
的變化曲線。可看出健肢因需要克服自身重力, 逐漸增大至趨于 9.8 N。因為患肢跟隨健肢做鏡像方向上的不完全發力,所以
逐漸增大至趨于 9.8 N。因為患肢跟隨健肢做鏡像方向上的不完全發力,所以  與
與  方向相同,但大小為
方向相同,但大小為  ,
, 逐漸增大至趨于 5.6 N。上述定義的患肢補償力矩
逐漸增大至趨于 5.6 N。上述定義的患肢補償力矩  ,所以
,所以  隨著
隨著  和
和  的變化而變化,
的變化而變化, 逐漸增大至趨于 4.2 N。圖 9b 表示的是健患肢同時執行肩關節水平面后伸運動時,健肢力矩
逐漸增大至趨于 4.2 N。圖 9b 表示的是健患肢同時執行肩關節水平面后伸運動時,健肢力矩  、患肢估計力矩
、患肢估計力矩  以及患肢補償力矩
以及患肢補償力矩  的變化曲線。與執行肩關節矢狀面前屈運動實驗結果相同的是患肢肌肉發力的方向與健肢一致但力矩較小,可以把肩關節水平面后伸運動的實驗過程分為五個階段:① 正向加速階段:在 0~1.0 s 內,
的變化曲線。與執行肩關節矢狀面前屈運動實驗結果相同的是患肢肌肉發力的方向與健肢一致但力矩較小,可以把肩關節水平面后伸運動的實驗過程分為五個階段:① 正向加速階段:在 0~1.0 s 內, 與
與  正向增長;② 正向減速階段:在 1.0~2.2 s 內,
正向增長;② 正向減速階段:在 1.0~2.2 s 內, 與
與  正向減小;③ 勻速階段:在 2.2~3.3 s 內,
正向減小;③ 勻速階段:在 2.2~3.3 s 內, 與
與  保持不變;④ 反向加速階段:在 3.3~4.0 s 內,
保持不變;④ 反向加速階段:在 3.3~4.0 s 內, 與
與  反向增長;⑤ 反向減速階段:在 4.0~5.0 s 內,
反向增長;⑤ 反向減速階段:在 4.0~5.0 s 內, 與
與  反向減小。在這五個階段中患肢補償力矩
反向減小。在這五個階段中患肢補償力矩  隨著
隨著  和
和  的變化,保持在 ? 1.9~1.8 N 內。
的變化,保持在 ? 1.9~1.8 N 內。
通過上述實驗求得受試者在執行肩關節矢狀面前屈和水平面后伸兩組發力動作時患肢的自適應補償力矩,將此數據實時反饋給肩關節康復機器人以協助患肢跟隨健肢做鏡像方向的發力動作。此實驗健患肢肩關節矢狀面前屈和水平面后伸兩組動作分別重復執行 10 次。通過 IMU 采集到的健肢運動軌跡,經鏡像映射得到患肢跟隨軌跡,如圖 10 所示。
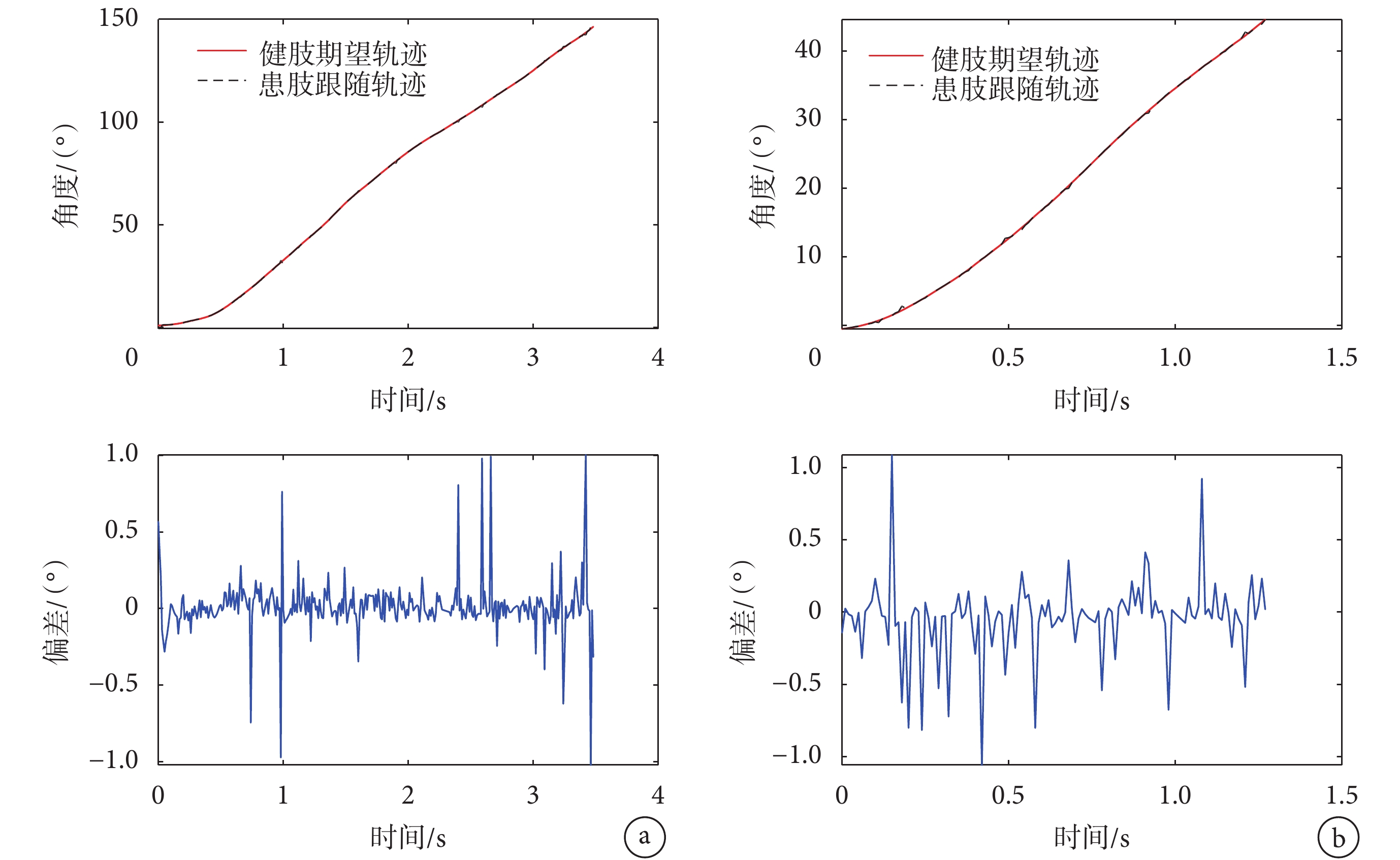
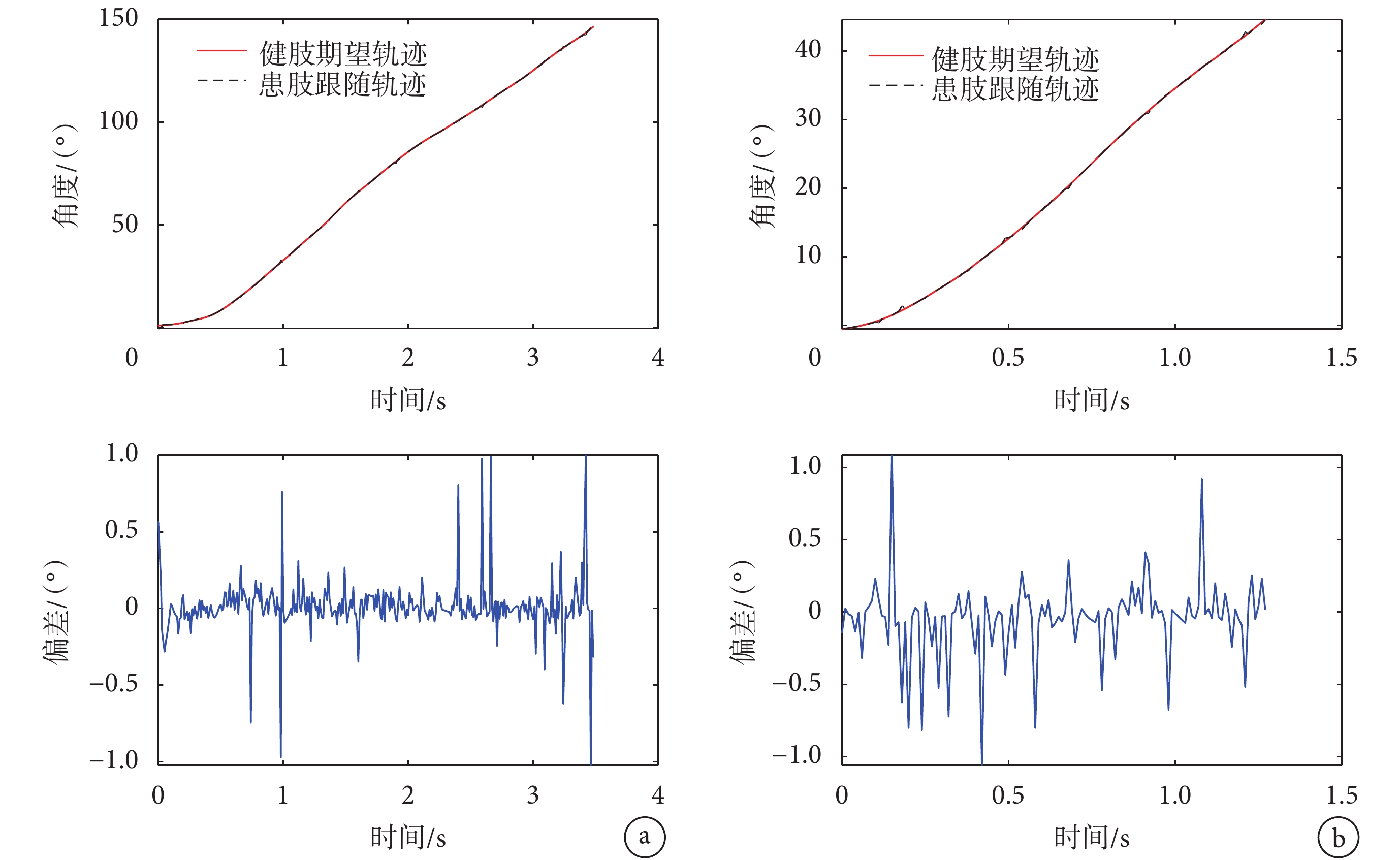 圖10
患肢跟蹤健肢軌跡情況
圖10
患肢跟蹤健肢軌跡情況
a. 肩關節矢狀面前屈運動跟蹤情況;b. 肩關節矢狀面后伸運動跟蹤情況
Figure10. The condition of the affected limb tracking the healthy limba. the tracking of anteflexion of the shoulder joint in the direction of sagittal planes; b. the tracking of extension of the shoulder joint in the direction of sagittal planes
圖 10 中紅色實線為健肢運動軌跡,黑色虛線為患肢跟蹤軌跡,藍色實線為兩者的角度誤差。圖 10a 表示的是在執行肩關節矢狀面前屈運動時健患肢的運動軌跡,即健患肢肩關節矢狀面前屈角度變化。可以看出健肢肩關節矢狀面前屈角從 0° 較勻速地增大至 128°,患肢經過自適應助力補償后,肩關節矢狀面前屈角度變化與健肢基本吻合,計算出的利用變論域模糊自適應 PD 控制器進行控制的健患肢軌跡跟蹤誤差為  ;圖 10b 表示的是在執行肩關節水平面后伸運動時健患肢肩關節水平面后伸角度變化。健肢肩關節水平面后伸角從 0° 增大至 43°,患肢跟隨軌跡與健肢運動軌跡也大致吻合,計算出的健患肢軌跡跟蹤誤差為
;圖 10b 表示的是在執行肩關節水平面后伸運動時健患肢肩關節水平面后伸角度變化。健肢肩關節水平面后伸角從 0° 增大至 43°,患肢跟隨軌跡與健肢運動軌跡也大致吻合,計算出的健患肢軌跡跟蹤誤差為  。可以看出,在執行這兩組發力動作時計算出的健患肢軌跡誤差極小,并且通過對比圖 10a 與圖 10b 中紅色實線和黑色虛線,可以表明通過鏡像訓練患肢對健肢有較好的跟蹤效果。
。可以看出,在執行這兩組發力動作時計算出的健患肢軌跡誤差極小,并且通過對比圖 10a 與圖 10b 中紅色實線和黑色虛線,可以表明通過鏡像訓練患肢對健肢有較好的跟蹤效果。
本研究獲得中國南京同仁醫院醫學倫理委員會的倫理學批準,受試者在進行肩關節力估計實驗與鏡像康復訓練實驗之前,已了解實驗相關流程。我們在實驗過程中對其過程進行照相,受試者就對其進行照相和對實驗數據作進一步的分析表示知情同意。
4 結論
針對于肩關節康復患者,本文設計了一種自適應調節助力的鏡像康復訓練系統及其控制算法。實現康復機器人輔助患肢與健肢做同步鏡像運動,選定的康復動作為肩關節矢狀面屈曲和水平面后伸,在康復過程中同時采集健肢 IMU 與患肢 sEMG 數據。通過實驗所得的患肢跟隨運動軌跡與健肢運動軌跡大致吻合,表明鏡像康復訓練使患肢的康復效果較好。其中通過加入變論域模糊自適應 PD 控制,將健肢力矩與患肢估計力矩的差值作為患肢補償力矩,從而實現患肢的自適應調節助力補償。此系統通過考慮患肢的恢復情況,充分發揮了患肢的訓練主動性,康復訓練效果較好。
利益沖突聲明:本文全體作者均聲明不存在利益沖突。
引言
隨著中國逐漸步入老齡社會,腦卒中的老年患者逐漸增多,給社會和家庭帶來沉重負擔。傳統康復治療方法不僅訓練強度弱、效率低下,而且在治療效果及康復評價等方面受制于醫師的主觀臨床經驗。而近年來具有高重復性、高精確性等特點的可穿戴式康復機器人技術可在一定程度上解決此問題[1-4]。
鏡像康復訓練是指利用平面鏡成像原理,將健肢活動的畫面復制到患肢,通過視錯覺及視覺反饋,讓患者想象成患肢運動的一種康復治療手段[5]。鏡像康復訓練方法在提高康復訓練效果方面取得了較好的效果,但在傳統的鏡像療法中患側并沒有得到實際的康復訓練運動。為了在一定程度上解決傳統鏡像康復療法中存在的問題,近年來國內外研究機構將鏡像療法融入機器人輔助康復訓練系統[6]。Wang 等[7]使用慣性測量單元(Inertial Measurement Unit,IMU)測得健肢關節空間運動軌跡映射至患肢外骨骼做同步鏡像運動,提高了患者的康復效果。Gao 等[8]利用 Kinect、外骨骼開發了一套虛擬現實鏡像訓練系統,以檢測康復機器人的運動意圖,實驗表明是一種可廣泛采用的治療干預方法。Kim 等[9]提出將功能性電刺激與鏡像療法相結合,發現此方法可有效改善腦卒中患者的上肢運動功能。Kojima 等[10]將肌電觸發神經肌肉刺激與鏡像療法聯合,發現腦卒中患者的肢體運動功能及關節活動角度均有明顯改善。諸多研究表明,患者健患肢同時進行康復訓練效果更好[11-12]。
上述鏡像療法通過康復機器人輔助患肢與健肢做同步鏡像運動,實現患肢的康復訓練,但這只是單純的被動式跟隨訓練,沒有考慮到患肢的實時恢復情況,訓練效果有限。針對此問題,提出一種自適應調節助力的鏡像康復訓練控制方法。該方法通過構建肩關節動力學模型和肌力估計模型計算出患肢補償力矩,可對患肢提供實時的助力補償,提高了患肢訓練的主動性,實現了在鏡像訓練過程中最大程度地訓練患肢肌力。
1 肩關節康復機器人結構設計
根據人體肩關節生物力學特征[13-14],肩關節由鎖骨、肱骨及肩胛骨組成,屬于一種典型球窩關節,可以進行多軸性靈活運動。肩關節運動具體可分解為 3 種正交運動:冠狀面內的外展/內收、矢狀面的前屈/后伸和水平面的內旋/外旋[15]。運動示范如圖 1 所示。
圖1
肩關節 3 種正交運動示范
Figure1.
Demonstration of three orthogonal movements of the shoulder joint
根據上述人體肩關節運動生物力學分解,本文研制了一款外骨骼式肩關節康復機器人,其結構如圖 2 所示。所研制肩關節康復機器人采用了串聯的三個正交轉動關節 J1、J2 和 J3,分別如圖 2 所示組件 1、組件 2 與組件 3 的位置,以實現肩的球關節運動。其中,組件 3 是半圓形外骨骼結構,可通過束縛帶固定患者上肢;組件 4 被設計為一個可調節的被動關節,通過旋轉旋鈕調節角度并使用旋擰固定;組件 5 為可手動調節長度的連桿,用來適應不同臂長的人體上肢。同時為了滿足不同人的坐高,設計將機器人固定在可升降底座上。此結構整體可滿足不同體型的人體使用。
圖2
外骨骼式肩關節康復機器人機械結構
Figure2.
Mechanical structure of exoskeleton shoulder joint rehabi litation robot
2 自適應調節助力的鏡像康復訓練控制算法設計
為了在鏡像康復訓練時最大程度地訓練患肢肌力,本文使用上述外骨骼式肩關節康復機器人作為實驗平臺,提出了一種自適應調整助力的鏡像康復訓練控制方法。控制策略示意圖如圖 3 所示,主要是由基于 IMU 的健肢軌跡獲取、變論域模糊自適應比例微分(proportion differentiation,PD)控制、基于表面肌電信號(surface electromyography,sEMG)的患肢肌力估計以及患肢助力自適應調節四個部分組成。
圖3
自適應調節助力的鏡像康復訓練控制策略
Figure3.
Control strategy of mirror-type rehabilitation training with adaptive adjustment assistance
2.1 基于 IMU 的健肢軌跡獲取
本系統采用 IMU 來捕捉健肢的肩關節運動軌跡,這里需要對 IMU 提供的原始信息向肩關節坐標系進行坐標轉換[16]。如圖 4 所示將 IMU 佩戴于上肢大臂內側,同時設定 IMU 座標系為 Ouvw,肩關節座標系為 Oxyz。
圖4
IMU 坐標系與肩關節坐標系定義
Figure4.
Definition of IMU coordinate system and shoulder joint coordinate system
所有相關原始坐標數據關節都可以通過旋轉矩陣 RT 得到新位置向量,旋轉矩陣 RT 求法如下:設 Oxyz 有一固定點 M,其在 Ouvw、Oxyz 的位置向量分別為 和 ,則
|
|
其中 iu、jv、kw 是 IMU 基坐標系的標準正交基;ix、jy、kz 是肩關節基坐標系的標準正交基。固定點 M 在肩關節坐標系中的位置向量恒為 ,而該點在 IMU 坐標系中的位置向量 分別在 iu、jv、kw 方向上的投影可表示為:
|
根據旋轉變換性質可知 R 是正交矩陣,則有 R? 1 = RT,RT即為旋轉變換矩陣。
肩關節在空間位置信息即肩關節坐標系與 IMU 坐標系之間的相對關系可以選擇的輸出數據形式有:歐拉角、四元數、旋轉矩陣等[17]。本文選用歐拉角描述的姿態進行輸出。IMU 輸出的歐拉角為 Aroll、Apitch、Ayaw,它的旋轉矩陣就是肩關節坐標系 Oxyz 相當于 IMU 坐標系 Ouvw 的變換矩陣。綜合定義與 IMU 安裝方式,可通過 IMU 測得健肢肩關節實時運動關節角度,肩關節外展內收角 ,肩關節屈伸角 ,肩關節內外旋角 。
2.2 變論域模糊自適應 PD 控制
機器人系統是一種復雜的非線性強耦合動態系統,傳統模糊比例積分微分控制器只適用于具有模糊環境的粗糙控制場合,對于高精度的控制問題,模糊控制的效果不理想[18]。所以本系統選用變論域模糊自適應 PD 控制,在規則形式不變的前提下,論域隨著誤差的變小而收縮,從而提高了控制精度。
本系統采用的變論域模糊自適應 PD 控制器的輸入為健肢肩關節軌跡獲取的角度信號差值 與此差值的變化率 ,將這兩個值的初始模糊論域分為 6 級,即 和 ,變論域模糊自適應 PD 控制器的輸出為機器人的控制力矩 ,其輸出力矩的論域可表示為 。通過 和 建立模糊生產器[19]:
|
|
其中 和 分別表示角度信號差 論域的最小值和最大值, 和 分別表示角度信號差的變化率 論域的最小值和最大值,E 和 CE 為模糊生產器的輸出。
根據自適應 PD 控制率設計模糊規則如下:
|
|
|
其中 、 為 PD 控制器的最終控制參數,、 為 PD 控制器的初始整定參數,、 為模糊控制器輸出量,、 為修正系數。
通過隸屬度最大值方法進行控制的模糊消除,直接選擇輸出模糊子集的隸屬度函數峰值作為輸出的確定值,輸出模糊子集 的邏輯“并”為:,通過取中值反求控制變量 的精確輸出[20]。然后逐漸縮小角度信號差 和其變化率 的論域,可確定縮小后的 、 以及輸出力矩 的論域,分別為:
|
|
|
其中 、、 分別為相應論域的伸縮因子。
2.3 基于 sEMG 的患肢肌力估計
采用 Delsys 表面肌電儀來采取非入侵式 sEMG,其形式簡單且對受試者沒有傷害。在鏡像康復訓練中將屈曲/伸展、外展/內收和內旋/外旋三組肩關節基本運動自由度作為手臂動作模式。參考肩關節運動時相關肌肉收縮的情況,結合人體解剖結構學[21],選取與肩關節動作最相關的肌肉——三角肌前肌、三角肌后肌、三角肌中肌和斜方肌,并在對應肌肉位置佩戴表面肌電傳感器,如圖 5a所示。
圖5
肩關節力估計流程圖
a. 肌電傳感器安裝方式;b. 力傳感器安裝方式
Figure5. Flow chart for estimating the force of the shoulder jointa. the installation method of sEMG sensor; b. the installation method of force sensor
要完成基于 sEMG 的肌力估計,需采集肩關節處肌肉發力過程中的力信號作為參考數據[22],本文采用 ROBOTIQ FT300 六維力傳感器進行采集。為了便于后續實驗,此力傳感器使用自帶軟件進行重力補償。在實驗過程中將力傳感器置于機器人組件 3 中用于固定患肢的部件上,具體安裝位置如圖 5b所示。在此過程中實時采集受試者肩關節 4 個部位的 sEMG(用 X 表示)與力信號(用 F 表示),sEMG 選用時域方法進行特征提取得到特征矩陣 XF,將 XF 與 F 構成樣本 Sm。長短期記憶網絡(long short-term memory,LSTM)對輸入網絡的 XF 進行非線性映射得到受試者肩關節力的估計值。
|
|
|
式中 X1~X4 分別是第 1~4 個肌電傳感器采集到的 4 路 sEMG,Fx、Fy、Fz 分別是力傳感器在 x、y、z 方向上檢測到的力信號,m 為采樣點的個數。
利用肌電傳感器和力傳感器采集到 sEMG 和力信號后,通過循環神經網絡(recurrent neural network,RNN)訓練完成對患肢的肌力估計,傳統的 RNN 存在依賴性問題,而 LSTM 是一種時間循環神經網絡,可有效契合人體 sEMG 的時變特點[23]。所以此系統將采集到的 sEMG 特征值和力信號代入 LSTM 中來識別患肢肌力,其流程如圖5 所示。在 LSTM 網絡中,輸出動作的選擇主要有三個階段:一是忘記階段,用計算出的 Zf 來作為遺忘門,來控制上一狀態 Ct-1 需要遺忘和記住的狀態 St-1;二是選擇記憶階段,對輸入 St 進行選擇記憶,如果能獲得較高的獎賞值,則著重記錄下來,反之則少記一些,由于 RNN 是時序的,所以當前的輸入內容為當前時刻的狀態,由 Zi 來作為控制選擇的門控信號;三是輸出階段,通過 Z0 來控制哪些將會被當成當前狀態的輸出動作,同時對上一階段得到的 Ct-1 通過 tanh 激活函數進行縮放變化。這里主要是通過同步獲取的患肢肩關節處肌肉發力過程中的力信號和肩部肌肉 sEMG 特征值作為 LSTM 的訓練樣本輸入,對 LSTM 進行訓練。而后對所建立的肌力估計模型采用肩關節處肌肉發力過程中的力信號作為 LSTM 的訓練樣本輸出進行測試。訓練后的 LSTM 可通過 sEMG 特征值來估計關節力輸出,并根據力傳感器到肩關節的距離進一步得到力矩 。
2.4 患肢助力自適應調節
將 2.1 節中利用 IMU 捕捉健肢的運動軌跡作為鏡像訓練中患肢跟隨的鏡像期望軌跡,并通過上臂長為 l、質量為 m 的健肢上臂建立肩關節動力學模型,IMU 實時采集到的肩關節角度為 ,則可求得此系統的動能 E1 和勢能 E2,可表示為:,,其中 g 為重力加速度。
根據拉格朗日方程可得:
|
其中 , 為患肢跟隨健肢肩關節運動的期望力矩。肩關節運動學模型可由拉格朗日方程寫成矩陣形式,可表示為:
|
其中 為慣性矩陣; 為離心力和哥氏力矢量; 重力矢量。則患肢跟隨健肢肩關節運動的期望力矩 與患肢的發力力矩 的差值定義為康復機器人需對患肢補償的力矩 。同時引入重力補償環節,重力補償力矩為 。最終得到的康復機器人關節總力矩為變論域模糊自適應 PD 控制、患肢助力補償和重力補償環節的力矩和:
|
3 實驗與結果分析
3.1 肩關節力估計實驗
肩關節力估計實驗是將外骨骼式肩關節康復機器人作為實驗平臺,選擇一名健康受試者,受試者右上肢模擬患肢穿戴康復機器人,按 2.3 節中的固定方式將六維力傳感器固定在機器人上,并在患肢對應肌肉位置佩戴 sEMG 采集裝置,同步獲取其肩關節處肩部肌肉發力過程中的力信號和 sEMG。設置 sEMG 采集裝置采樣頻率為 2 000 Hz、采樣時間(分別執行矢狀面前屈/后伸、水平面前屈/后伸兩組動作所用時間)為 30 s,采集執行上述兩組發力動作時肩關節運動相關肌肉的 sEMG 信號,并采用肌力估計效果較好的絕對值均值(mean absolute value,MAV)時域特征提取方法[22]提取肌電特征值。在使用力傳感器采集肩關節力信號之前進行校零工作。
受試者患肢依靠肩部依次做出矢狀面前屈/后伸和水平面前屈/后伸四個方向的發力動作,分別對應力傳感 z 軸正/負方向和 x 軸正/負方向。采集肩關節運動過程中的 sEMG 和力信號,將這兩個信號作為 LSTM 的訓練樣本輸入,訓練后的 LSTM 通過 sEMG 特征值來估計肩關節力輸出。
指令受試者患肢伸直置于體側為起始位,康復機器人協助患肢做矢狀面后伸再回起始位、矢狀面前屈再回起始位的發力動作,即完成矢狀面前屈/后伸;指令受試者患肢伸直側平舉為起始位,康復機器人協助患肢做水平面前屈再回起始位、水平面后伸再回起始位的發力動作,即完成水平面前屈/后伸。將矢狀面前屈/后伸和水平面前屈/后伸兩組發力動作分別重復 20 次,選擇 10 次作為訓練樣本,剩余 10 次作為測試樣本。圖 6 所示為受試者執行上述兩組動作時所測得的 sEMG 與力信號。圖 7 所示受試者肩關節力估計實驗結果。
圖6
肩關節 sEMG 及力信號
Figure6.
sEMG signals and force signals of shoulder joint
圖7
肩關節力估計實驗
a. 肩關節矢狀面前屈/后伸力估計;b. 肩關節水平面前屈/后伸力估計
Figure7. Experiments for estimating shoulder joint forcea. experiments for estimating shoulder joint force of anteflexion/extension in the direction of sagittal planes; b. experiments for estimating shoulder joint force of anteflexion/extension in the direction of horizontal planes
圖 7 中實線表示通過六維力傳感器測量的患肢肩關節肌力,為實際值;虛線表示通過 sEMG 特征信息估計的肌力大小,為估計值。其中圖 7a 是指令受試者分別執行 6 次與 20 次肩關節矢狀面前屈/后伸運動進行力估計,以重復執行 20 次發力動作為例可以分為四個階段:① 起始位-矢狀面后伸:在 2.9~4.8 s 內,受試者患肢從起始位做矢狀面后伸的發力動作,患肢肌力反方向增長;② 矢狀面后伸-起始位:在 4.8~7.5s 內,受試者患肢做矢狀面后伸回到起始位的發力動作,患肢肌力反方向減小;③ 起始位-矢狀面前屈:在 7.5~11.4 s 內,受試者患肢從起始位做矢狀面前屈的發力動作,患肢肌力正方向增長;④ 矢狀面前屈-起始位:在 11.4~12.4 s 內,受試者患肢做矢狀面前屈回到起始位的發力動作,患肢肌力正方向減小。計算在這四個階段中肩關節矢狀面前屈/后伸方向上力的測量值的標準差(root mean square,RMS)為 0.76 N、殘差絕對值均值(mean absolute value of the error,MAVE)為 0.28 N。通過比較分別執行 6 次與 20 次指定發力動作估計值與實際值的誤差,可以看出 20 次重復試驗后的誤差明顯小于 6 次重復試驗,表明訓練后的 LSTM 網絡可以較準確地估計出患肢真實距離。圖 7b 是指令受試者分別執行 6 次與 20 次肩關節矢狀面前屈/后伸運動進行力估計,同樣也以重復 20 次發力動作為例分為四個階段:① 起始位-水平面前屈:在 14.2~16.3 s 內,受試者患肢從起始位做水平面前屈的發力動作,患肢肌力正方向增長;② 水平面前屈-起始位:在 16.3~19.8 s 內,受試者患肢做水平面前屈回到起始位的發力動作,患肢肌力正方向減小;③ 起始位-水平面后伸:在 19.8~22.6 s 內,受試者患肢從起始位做水平面后伸的發力動作,患肢肌力反方向增長;④ 水平面后伸-起始位:在 22.6~24.9 s 內,受試者患肢做水平面后伸回到起始位的發力動作,患肢肌力反方向減小。在這四個階段內計算出的肩關節水平面前屈/后伸方向上力的測量值的 RMS=0.79 N、MAVE=0.41 N。通過比較分別執行 6 次與 20 次指定發力動作估計值與實際值的誤差,同樣可以看出 20 次重復試驗后的誤差明顯小于 6 次重復試驗,表明訓練后的 LSTM 網絡可以較準確地估計出患肢真實距離。以上結果顯示,計算出的肩關節矢狀面前屈/后伸和水平面前屈/后伸方向上力與測量值的 RMS 和 MAVE 均不大于 1 N,結合圖 7a 和圖 7b 的實際值和估計值曲線,可以看出通過 sEMG 特征值估計的肩關節力輸出能較好地反映通過力傳感器測量的肩關節真實肌力大小。
3.2 鏡像康復訓練實驗
同樣鏡像康復訓練實驗也是將外骨骼式肩關節康復機器人作為實驗平臺,將六維力傳感器固定在機器人上。受試者左上肢作為健肢佩戴 IMU,右上肢模擬患肢穿戴康復機器人,并佩戴 sEMG 采集裝置。在此過程中設置 sEMG 采集裝置采樣頻率為 2 000 Hz,在執行矢狀面前屈動作時采樣時間為 8 s,在執行水平面后伸動作時采樣時間為 5 s,采集執行肩關節矢狀面前屈、水平面后伸兩組動作時患肢肩關節的 sEMG 信號并提取其特征值,力傳感器校零后再采集患肢肩關節力信號。指令受試者健肢與患肢伸直置于體側為起始位,健肢盡量保持勻速做肩關節矢狀面前屈的發力動作,患肢在不發力或用力少于健肢的情況下跟隨健肢做鏡像方向的不完全發力,完成健患肢肩關節矢狀面前屈實驗;同樣指令受試者健肢與患肢伸直前平舉為起始位,健肢盡量保持勻速做肩關節水平面后伸的發力動作,患肢在不發力或用力少于健肢的情況下跟隨健肢做鏡像方向的不完全發力,完成健患肢肩關節水平面后伸實驗。具體如圖 8 所示。
圖8
健患肢肩關節矢狀面前屈、水平面后伸實驗
Figure8.
Experiment of sagittal anterior flexion and horizontal extension of the shoulder joints of healthy and affected limbs
在執行這兩組康復動作的過程中,通過 IMU 采集健肢運動軌跡并代入肩關節動力學模型可求得健肢力矩 。然后通過同步采集患肢 sEMG 和力信號并代入 3.1 節中的肌力估計模型中可求得患肢估計力矩 。兩者之差即為可對患肢自適應調節的補償力矩 。實驗結果如圖 9 所示。
圖9
患肢自適應補償力矩
a. 肩關節矢狀面前屈運動方向力矩;b. 肩關節矢狀面后伸運動方向力矩
Figure9. Adaptive compensation torque of the moment of the affected limba. the torque of anteflexion of the shoulder joint in the direction of sagittal planes; b. the torque of extension of the shoulder joint in the direction of sagittal planes
圖 9 中藍色實線表示健肢力矩 ,紅色虛線表示患肢估計力矩 ,黃色虛線表示可對患肢自適應調節的補償力矩 。圖 9a 表示的是健患肢同時執行肩關節矢狀面前屈運動時,健肢力矩 、患肢估計力矩 以及患肢補償力矩 的變化曲線。可看出健肢因需要克服自身重力, 逐漸增大至趨于 9.8 N。因為患肢跟隨健肢做鏡像方向上的不完全發力,所以 與 方向相同,但大小為 , 逐漸增大至趨于 5.6 N。上述定義的患肢補償力矩 ,所以 隨著 和 的變化而變化, 逐漸增大至趨于 4.2 N。圖 9b 表示的是健患肢同時執行肩關節水平面后伸運動時,健肢力矩 、患肢估計力矩 以及患肢補償力矩 的變化曲線。與執行肩關節矢狀面前屈運動實驗結果相同的是患肢肌肉發力的方向與健肢一致但力矩較小,可以把肩關節水平面后伸運動的實驗過程分為五個階段:① 正向加速階段:在 0~1.0 s 內, 與 正向增長;② 正向減速階段:在 1.0~2.2 s 內, 與 正向減小;③ 勻速階段:在 2.2~3.3 s 內, 與 保持不變;④ 反向加速階段:在 3.3~4.0 s 內, 與 反向增長;⑤ 反向減速階段:在 4.0~5.0 s 內, 與 反向減小。在這五個階段中患肢補償力矩 隨著 和 的變化,保持在 ? 1.9~1.8 N 內。
通過上述實驗求得受試者在執行肩關節矢狀面前屈和水平面后伸兩組發力動作時患肢的自適應補償力矩,將此數據實時反饋給肩關節康復機器人以協助患肢跟隨健肢做鏡像方向的發力動作。此實驗健患肢肩關節矢狀面前屈和水平面后伸兩組動作分別重復執行 10 次。通過 IMU 采集到的健肢運動軌跡,經鏡像映射得到患肢跟隨軌跡,如圖 10 所示。
圖10
患肢跟蹤健肢軌跡情況
a. 肩關節矢狀面前屈運動跟蹤情況;b. 肩關節矢狀面后伸運動跟蹤情況
Figure10. The condition of the affected limb tracking the healthy limba. the tracking of anteflexion of the shoulder joint in the direction of sagittal planes; b. the tracking of extension of the shoulder joint in the direction of sagittal planes
圖 10 中紅色實線為健肢運動軌跡,黑色虛線為患肢跟蹤軌跡,藍色實線為兩者的角度誤差。圖 10a 表示的是在執行肩關節矢狀面前屈運動時健患肢的運動軌跡,即健患肢肩關節矢狀面前屈角度變化。可以看出健肢肩關節矢狀面前屈角從 0° 較勻速地增大至 128°,患肢經過自適應助力補償后,肩關節矢狀面前屈角度變化與健肢基本吻合,計算出的利用變論域模糊自適應 PD 控制器進行控制的健患肢軌跡跟蹤誤差為 ;圖 10b 表示的是在執行肩關節水平面后伸運動時健患肢肩關節水平面后伸角度變化。健肢肩關節水平面后伸角從 0° 增大至 43°,患肢跟隨軌跡與健肢運動軌跡也大致吻合,計算出的健患肢軌跡跟蹤誤差為 。可以看出,在執行這兩組發力動作時計算出的健患肢軌跡誤差極小,并且通過對比圖 10a 與圖 10b 中紅色實線和黑色虛線,可以表明通過鏡像訓練患肢對健肢有較好的跟蹤效果。
本研究獲得中國南京同仁醫院醫學倫理委員會的倫理學批準,受試者在進行肩關節力估計實驗與鏡像康復訓練實驗之前,已了解實驗相關流程。我們在實驗過程中對其過程進行照相,受試者就對其進行照相和對實驗數據作進一步的分析表示知情同意。
4 結論
針對于肩關節康復患者,本文設計了一種自適應調節助力的鏡像康復訓練系統及其控制算法。實現康復機器人輔助患肢與健肢做同步鏡像運動,選定的康復動作為肩關節矢狀面屈曲和水平面后伸,在康復過程中同時采集健肢 IMU 與患肢 sEMG 數據。通過實驗所得的患肢跟隨運動軌跡與健肢運動軌跡大致吻合,表明鏡像康復訓練使患肢的康復效果較好。其中通過加入變論域模糊自適應 PD 控制,將健肢力矩與患肢估計力矩的差值作為患肢補償力矩,從而實現患肢的自適應調節助力補償。此系統通過考慮患肢的恢復情況,充分發揮了患肢的訓練主動性,康復訓練效果較好。
利益沖突聲明:本文全體作者均聲明不存在利益沖突。