氣道阻抗的監測對肺功能疾病的準確評估及早期診斷具有重要臨床價值。針對當前肺功能設備中振蕩源系統體積大、功耗高等難以滿足動態測量需求的問題,本研究采用可控呼氣振蕩與狀態可視化反饋的新策略,設計了微型電磁振蕩源、集成傳感控制電路和動態反饋系統,開發了一種結構輕巧、功耗低及帶可視化狀態反饋的氣道阻抗監測系統。呼吸阻抗測量實驗及統計對比結果表明,該系統可實現穩定的5 Hz氣道阻抗測量,呼吸系統阻抗(R和X)頻譜曲線與臨床肺功能儀IOS的頻譜曲線均具有較為一致的變化趨勢,其差值均小于1.1 cm H2O·s/L;運動與靜息狀態組的呼吸阻抗R5差異有統計學意義,且呼吸電抗X5的波動幅值較大,表明本系統能測量氣道阻力參數的動態變異性。因此,本研究開發的阻抗監測系統支持受試者可手持移動、較長時間段內連續測量氣道阻抗的動態變化,為進一步開發低功耗、便攜化甚至可穿戴的動態肺功能監測設備提供了研究基礎。
引用本文: 匡英烽, 車波, 李軒, 劉磊, 鄧林紅. 便攜呼氣振蕩驅動的氣道阻抗監測系統研究. 生物醫學工程學雜志, 2024, 41(3): 430-438. doi: 10.7507/1001-5515.202309058 復制
版權信息: ?四川大學華西醫院華西期刊社《生物醫學工程學雜志》版權所有,未經授權不得轉載、改編
0 引言
肺部疾病是當前危害人類生命健康的高發病,開發快速、無損的肺功能檢測技術已經成為臨床即時診斷和治療的巨大需求[1-3]。傳統肺功能評估方法主要依賴于肺活量測定和肺功能試驗[4-8],但是這些方法均存在一定局限性,比如要求患者合作度高、操作繁瑣且處理時間較長,可提供的氣道信息較少等。
振蕩式氣道阻抗測量方法是一種無創、快速、協作要求低的肺功能評估方法[9]。該方法彌補了傳統肺活量測定方法無法反映氣道阻塞及分布等方面的不足,其工作原理是在自主呼吸過程中疊加一定振蕩頻率的壓力信號,通過測量反饋的壓力和流量來計算氣道阻抗變化,進而評估肺功能狀態[10-12]。其中,振蕩源作為產生激勵信號的關鍵部分,其發展經歷了從揚聲器振蕩源到直線音圈電機振蕩源、渦輪風機振蕩源的改進和優化[13-14]。相關代表研究工作有:以低音揚聲器作為振蕩源[15-17],但其裝置體積和功耗(約80 W)均較大;以精密控制的直線活塞電機作為振蕩源[18-20],其質量(約3.5 kg)和功耗(約48 W)仍舊較大;利用可控壓差變化渦輪風機組作為低頻振蕩源[21-24],其驅動功耗接近36 W,振蕩控制系統也較為復雜。
由于以上研究中振蕩源均需要額外的驅動和供電部分,使得整個測量系統體積偏大,極大地限制了設備的可移動性和動態測量范圍,僅限于在醫院肺功能室環境下使用,難以滿足家庭環境和長時間段內連續的肺功能監測和評估。近期研究報告表明,輕便的正壓呼氣振蕩排痰裝置具有在氣道阻抗測量方面的潛在可能[25]。不過,這種裝置的振蕩輸出受限于機械結構固有的振蕩頻率,也缺乏受試者的呼氣狀態反饋,因此難以提供阻抗測量所需的穩定可控的激勵頻率和幅值。
有鑒于此,本研究采用可控呼氣振蕩與可視化狀態反饋的新策略,設計了可控電磁振蕩閥、集成傳感與控制電路以及狀態反饋系統,開發了一種手持、低功耗和可長時間連續測量氣道阻抗的便攜設備,并與臨床肺功能儀參照以及呼吸系統阻抗測試結果進行對比,驗證該阻抗測量設備用于動態監測氣道阻抗變化的準確性和有效性。
1 材料與方法
1.1 呼氣驅動的振蕩源設計
本研究采用了一種新的振蕩驅動策略,設計了利用快速阻斷氣流的方法產生壓力振蕩輸出的振蕩源系統,包括低功耗電磁振蕩閥和輕量化的通氣管腔。振蕩閥由阻斷管的狹縫腔結構及嵌入的電磁振蕩器構成:電磁振蕩器采用DC 5V、1 A供電的超小型貫穿式電磁鐵,往復行程為4 mm,功耗約為5 W;阻斷腔設計為通孔啞鈴形狀,孔徑為3 mm。振蕩源外殼及通氣管腔的機械結構均采用3D建模軟件SolidWorks設計,最后通過3D打印得到聚乳酸輕量化的振蕩源結構。
1.2 集成傳感與控制系統設計
主控電路原理圖及其印刷電路板(printed circuit board,PCB)的設計均采用立創EDA軟件(LCEDA 6.5.22)。主控電路包括:主控芯片(Atmega328P-AU,8-bit)及外圍電路、傳感器接口電路和振蕩閥驅動電路(RZ7899)。此外,控制程序的編程設計和固件寫入采用Arduino IDE集成開發環境。
傳感器模塊采用集成醫用持續正壓通氣(continuous positive airway pressure,CPAP)傳感器(FS6122-200F200-5P40,Siargo,美國),可同步檢測壓力和流量信號,其響應時間為0.5 ms,流量范圍±250 SLPM,精度±2.5%,壓力范圍–5~50 cm H2O,精度±1.0%,模擬電壓輸出范圍為0.5~4.5 V。
1.3 可視化反饋系統設計
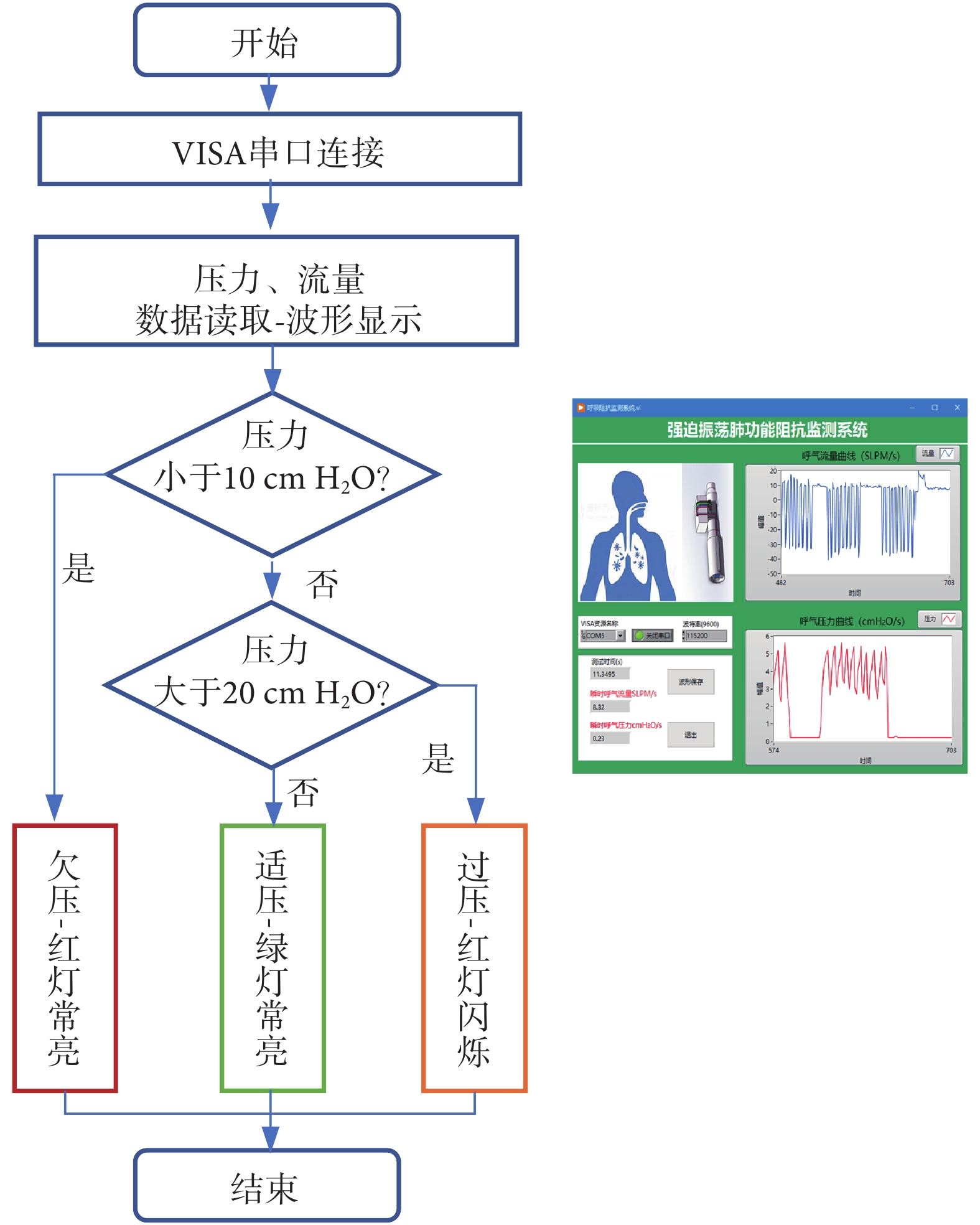
本研究引入呼氣狀態的可視化反饋系統,用于解決因呼氣強度差異導致的振蕩輸出不穩定和測量結果受干擾的問題。反饋系統的上位機界面的開發采用LabVIEW平臺(National Instruments 2021)設計完成,其工作流程如圖1所示:通過NI-VISA串口與下位機硬件建立通信(波特率115 200 bps),實時采集并顯示流量、壓力波形,再通過呼氣壓力在1個周期內的統計值進行判斷和狀態提示。根據已有文獻報道的正壓呼氣實驗[26-27],本研究設置了10~20 cm H2O·s/L范圍的閾值。當呼氣壓力統計水平分別低于10 cm H2O·s/L、介于10~20 cm H2O·s/L和高于20 cm H2O·s/L時,反饋系統分別判斷為欠壓、適壓和過壓狀態;再通過串口發送狀態提示指令到下位機,執行亮燈程序并提示受試者調整呼氣狀態。
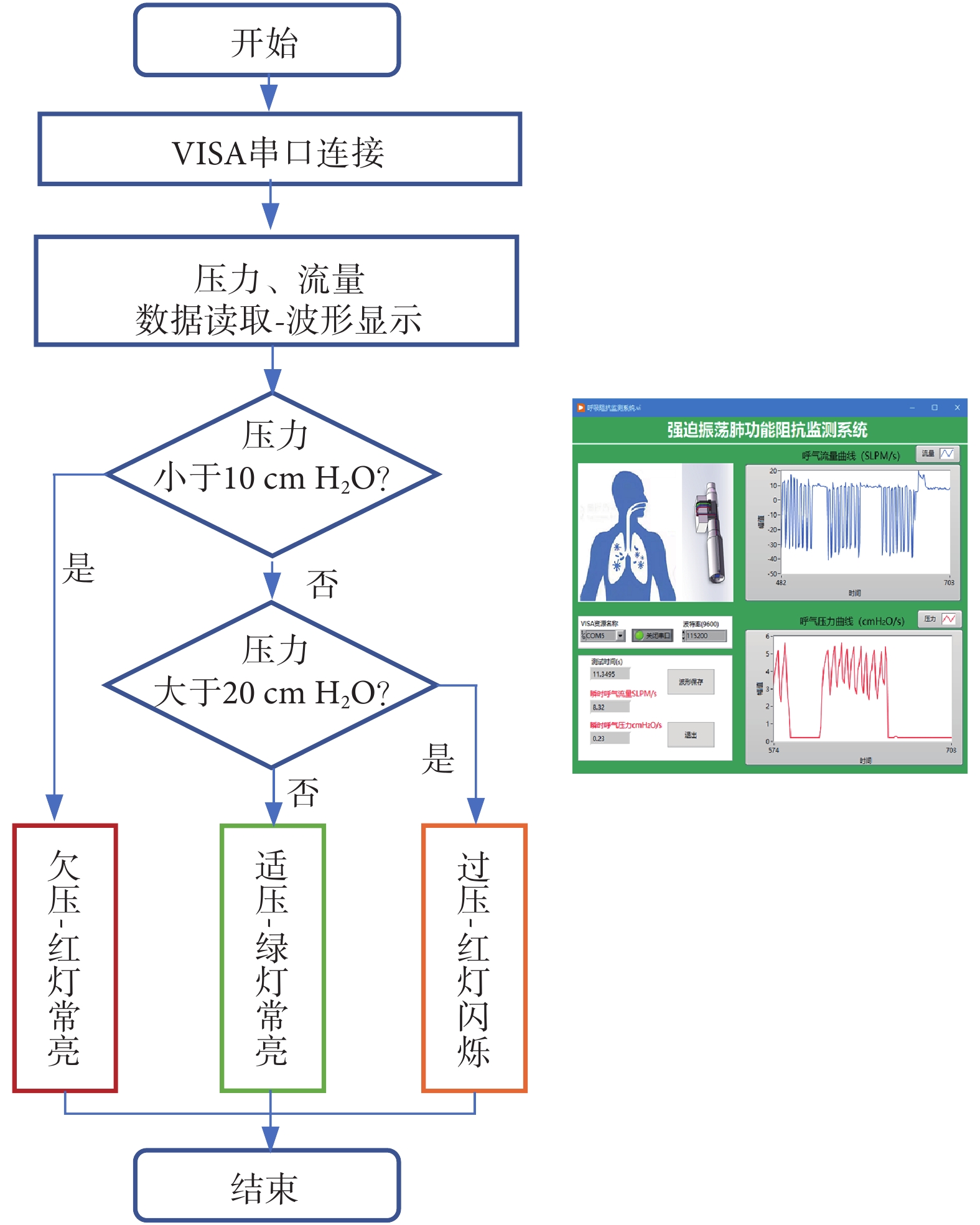 圖1
壓力、流量監測和可視化反饋的上位機流程設計
Figure1.
Flow chart of waveform monitoring and visual feedback system
圖1
壓力、流量監測和可視化反饋的上位機流程設計
Figure1.
Flow chart of waveform monitoring and visual feedback system
1.4 呼吸系統阻抗測量方案設計
為了驗證振蕩測量系統在氣道阻抗動態測量方面的有效性,本研究設置了靜息和運動狀態兩組呼吸系統阻抗測試,其中運動狀態組設置為爬7層樓梯3次往返運動后氣道收縮變化時的呼吸狀態。本研究的測試過程采用了5 Hz的激勵頻率,并以臨床肺功能儀(耶格MatersScreen IOS,德國)的測試結果作為參照。受試者均為實驗室志愿者,無哮喘、慢性阻塞肺病等呼吸疾病病史,其具體指標及相關信息如表1。
受試者在測試前均詳細了解了本次實驗的相關信息,簽署了知情同意書。具體測試過程參照歐洲呼吸學會(European Respiratory Society,ERS)推薦標準:① 測量過程中保持自主呼吸狀態,避免吞咽、聲門緊閉等活動給測量帶來呼吸偽影。② 每位測試對象在呼吸穩定狀態下,記錄4個呼吸周期的呼吸壓力 和流量信號
和流量信號 。③ 為減小測量過程中的阻抗短期變異性影響,每位測試對象連續測量 3 次。
。③ 為減小測量過程中的阻抗短期變異性影響,每位測試對象連續測量 3 次。
1.5 呼吸系統阻抗的參數計算
呼吸系統阻抗 的計算采用R-E-I三參數力學模型[28]:
的計算采用R-E-I三參數力學模型[28]:
 |
在傅里葉變換域的計算公式為:
 |
其中, ,
, 為角頻率。
為角頻率。 實部為呼吸阻抗
實部為呼吸阻抗  ,反映了氣道黏性阻力R;虛部為呼吸電抗
,反映了氣道黏性阻力R;虛部為呼吸電抗  ,反映了氣道彈性阻力E和慣性阻力I的疊加效果,并且具有顯著的頻率依賴性。
,反映了氣道彈性阻力E和慣性阻力I的疊加效果,并且具有顯著的頻率依賴性。
呼吸共振頻率Fres是反映氣道疾病敏感的力學參數,其估計方法為:
 |
1.6 信號處理與統計方法
振蕩壓力和流量信號的處理過程均在上位機軟件完成。信號的降噪處理采用了二階Buterworth低通濾波器,其截止頻率為50 Hz;5 Hz脈沖振蕩的多頻成分提取采用了梳狀濾波器,其通帶頻率為5 Hz及其諧波頻率;信號的時頻譜分析采用了快速傅里葉變換FFT算法,其窗類型為256寬度Hanning窗。此外,阻抗數據的統計分析采用了軟件OriginLab,在單因素方差分析中采用Turkey均值比較方法,檢驗水準為0.05。
2 實驗測試與結果分析
2.1 手持式呼吸阻抗監測系統及性能參數
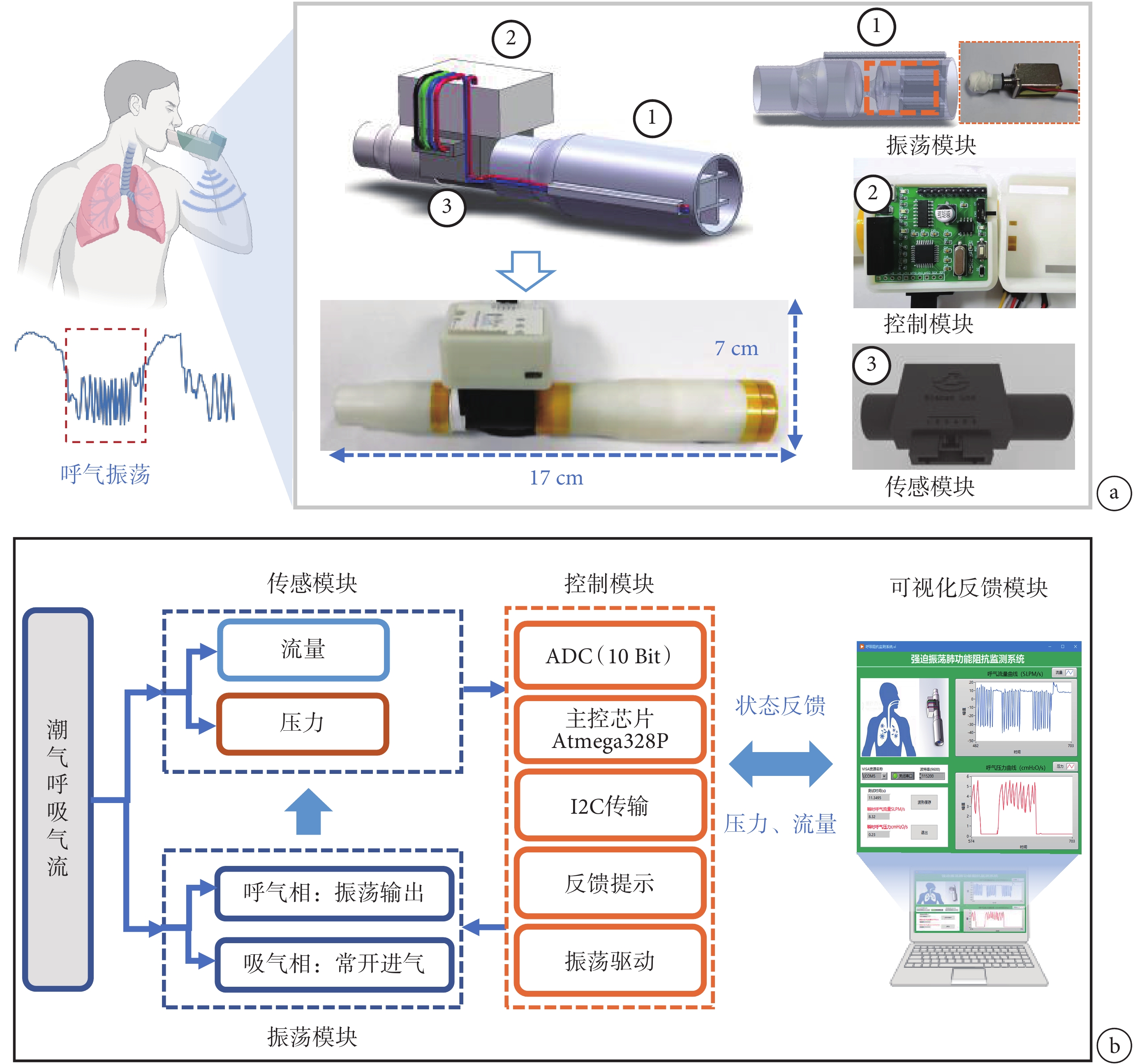
本系統包括手持振蕩測量裝置硬件和可視化反饋軟件兩大部分。圖2展示了該手持裝置的整體設計架構,其中圖2a為裝置的結構設計及輕量化的3D打印實物拍照,裝置主要包含振蕩、控制與傳感三個功能模塊:① 呼氣驅動的振蕩模塊及可控振蕩的電磁閥器件;② 整個系統控制電路PCB和3D封裝;③ 集成流量、壓力信號采集的傳感模塊。
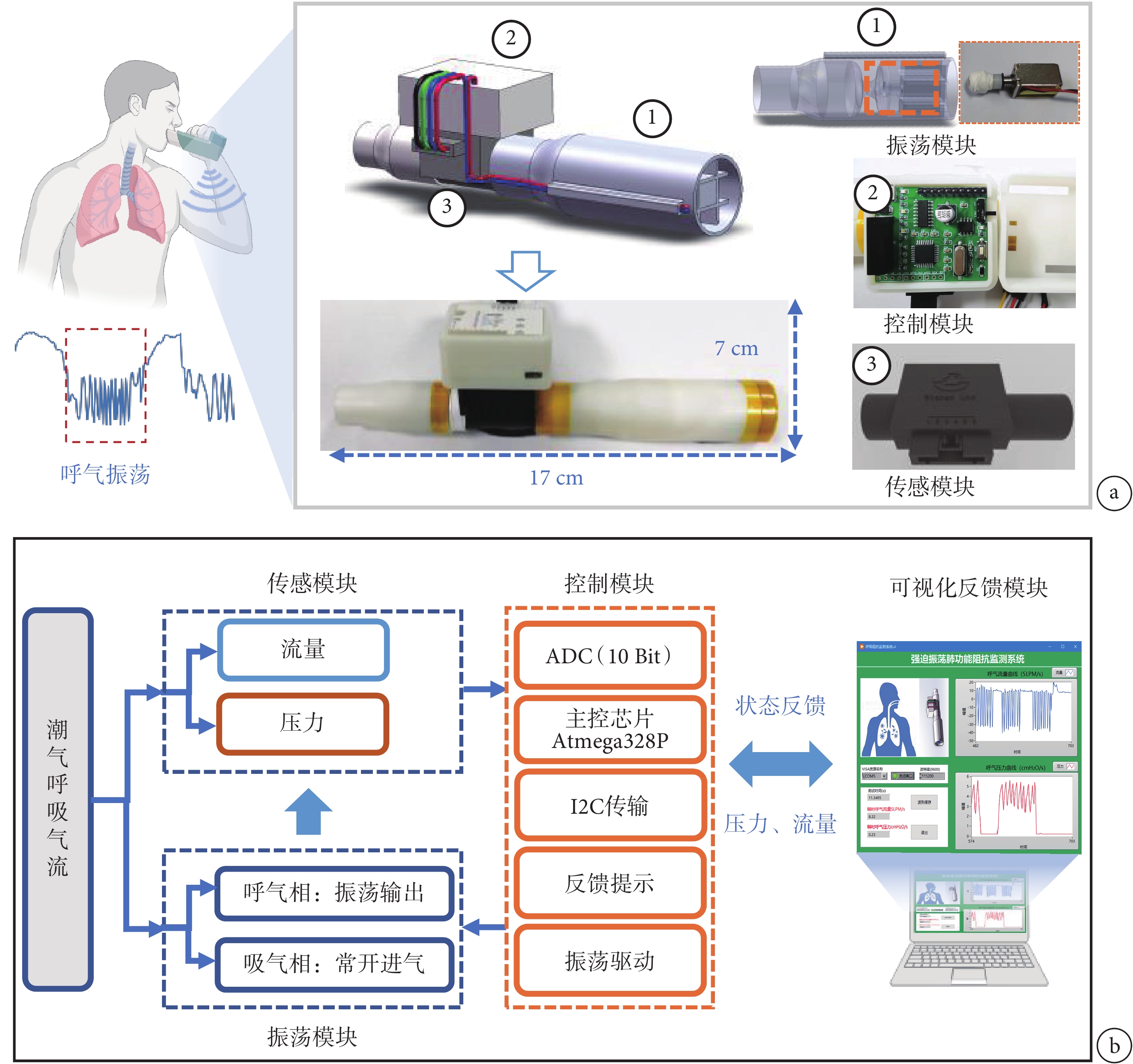 圖2
呼吸阻抗測量設備的整體架構
圖2
呼吸阻抗測量設備的整體架構
a. 設備結構設計、實拍圖及其主要模塊:振蕩模塊、控制模塊和傳感器模塊;b. 呼氣振蕩氣道阻抗測量系統的工作流程示意圖
Figure2. The overall architecture of the respiratory impedance measurement equipmenta. the structural design of the equipment, the actual picture and its main modules: oscillation module, control module and sensor module; b. schematic diagram of the workflow of the expiratory oscillation airway impedance measurement system
圖2b闡述了呼吸阻抗測量系統的工作流程。受試者在測試時,振蕩系統采用雙線程控制策略,包括信號采集以及振蕩閥開合控制兩部分。線程1實現對壓力和流量信號的連續采集、模數轉換(analog-to-digital conversion,ADC)和串口傳輸(I2C),采樣頻率設為100 Hz,傳輸波特率為115 200 bps。線程2實現對振蕩閥的開合頻率控制,通過檢測受試者呼氣相流量信號,觸發程序以設定頻率驅動電磁閥快速開合振蕩;而在吸氣相時,電磁閥保持常開的通氣狀態。最后,振蕩測量裝置通過I2C串口方式將數據傳輸到上位機軟件,在進一步信號處理后實時可視化顯示波形。
表2比較了本設備與當前研究中強迫振蕩肺功能設備的參數性能,分別對比了設備重量、體積、功耗和單次可測量時長,其中單次可測量時長綜合考慮了受試者在測量過程中的準確性和舒適性。相比于以揚聲器、音圈電機以及渦輪風機驅動為代表的研究工作,本手持裝置采用呼氣振蕩驅動的新策略,極大減小了整體設備的重量(0.115 kg)、體積(17 cm × 6 cm × 7 cm)和功耗(0.5 W)。此外,集成的控制電路和傳感系統以及可視化反饋系統的軟硬件設計,支持受試者手持和運動過程中較長時間段內的連續測量(180 s)。
2.2 持續正壓通氣的振蕩測試與數值仿真分析
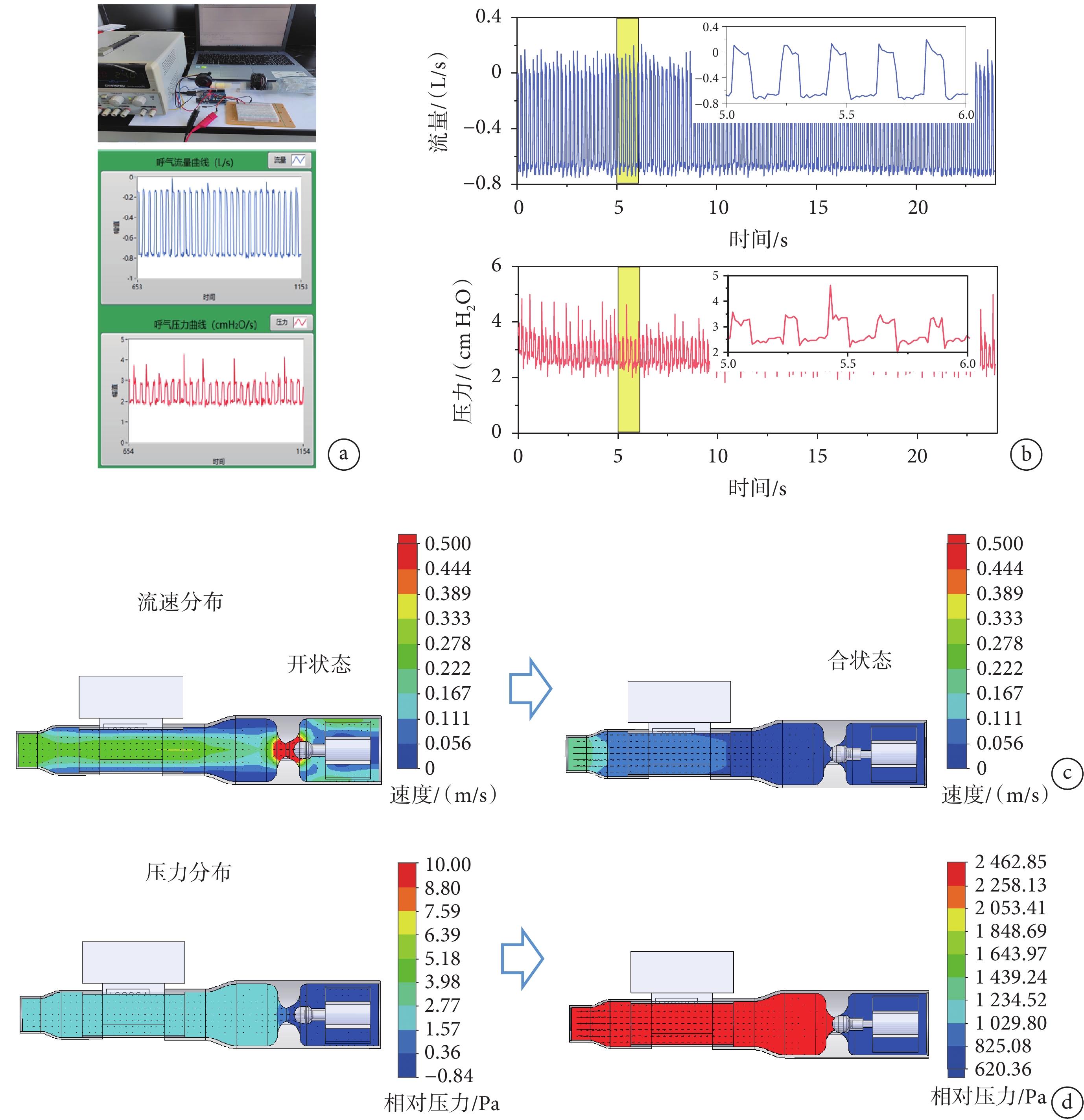
通氣測試中設置5 Hz頻率驅動振蕩源,周期性閉合阻斷的時間僅5 ms,可在通氣管腔內形成周期性的瞬時壓力脈沖振蕩。持續正壓通氣設備采用呼吸機專用的微型渦輪風機提供1 L/s的恒定流量,測試結果如圖3a~b所示。其中圖3a為通氣測試裝置及實時采集的流量、壓力振蕩波形;圖3b展示了截取時間段內的振蕩波形圖,其中黃色局部放大區域顯示:振蕩測量系統穩定輸出5 Hz振蕩頻率的流量和壓力,其平均振蕩幅值分別為0.8 L/s和1.9 cm H2O。
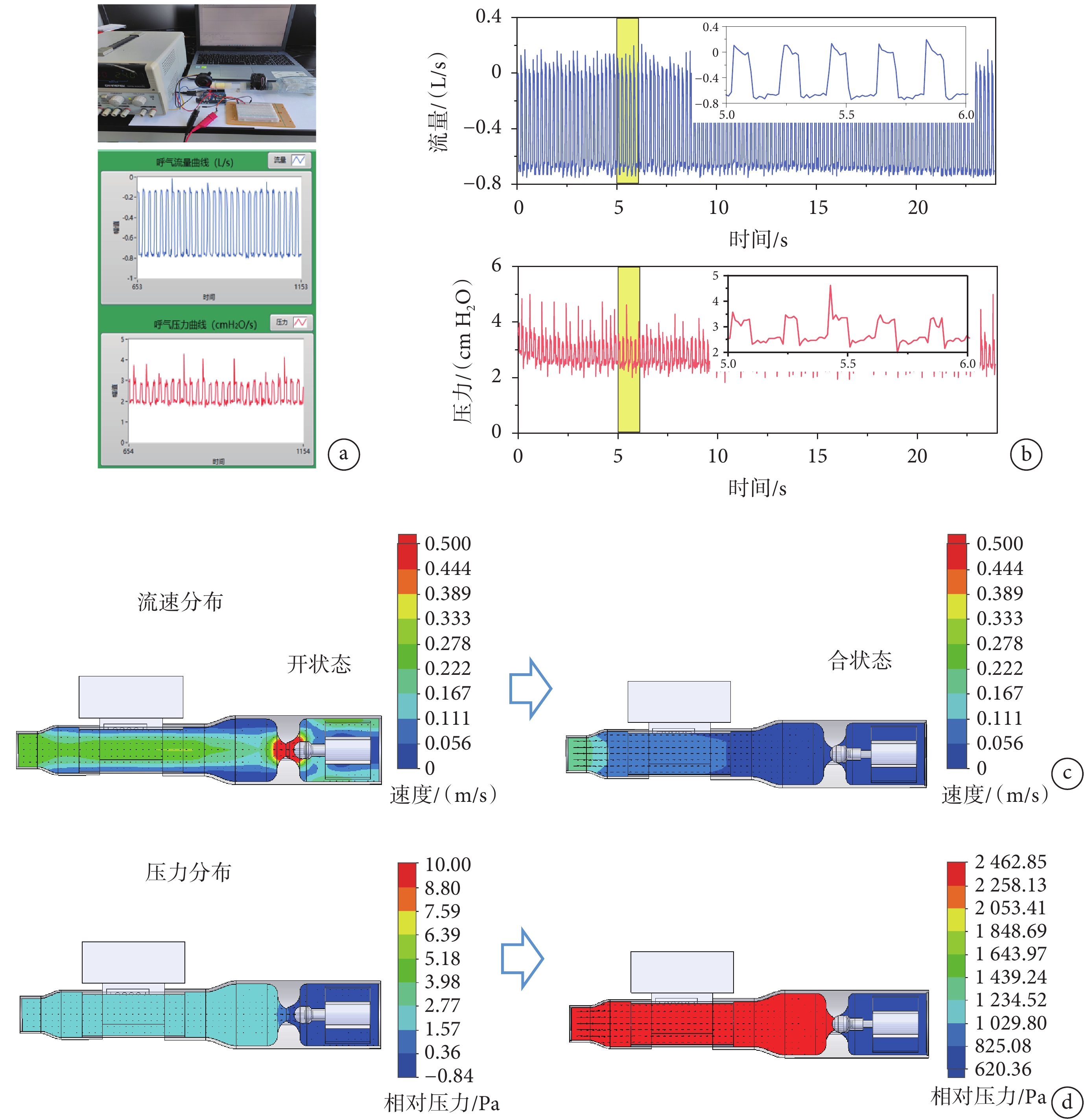 圖3
持續正壓通氣測試與數值仿真
圖3
持續正壓通氣測試與數值仿真
a. 正壓通氣測試的實驗場景及信號采集圖;b. 5 Hz激勵頻率的振蕩流量、壓力波形;c. 振蕩閥開合狀態下流速分布數值仿真切面圖;d. 壓力分布的數值仿真切面圖
Figure3. Oscillation test and numerical simulationa. photos of test and signal sampling; b. waveforms of flow and pressure with 5 Hz excitation; c. numerical simulation cut plot of flow velocity distribution with the valve off and on; d. cut plot of pressure distribution
本研究利用SolidWorks flow simulation分析了閥門開合振蕩過程中壓力和流量變化及分布情況(見圖3c~d)。仿真設定入口呼氣流量為1 L/s,仿真結果顯示:在閥門開、合過程中,狹縫口的流量、壓力最先響應,在入口處的瞬時壓力差最高可達24.42 cm H2O(見圖3d),此范圍的正壓可滿足氣道阻抗測量所需的振蕩壓力幅值要求。
2.3 呼氣振蕩驅動的氣道阻抗測量結果與分析
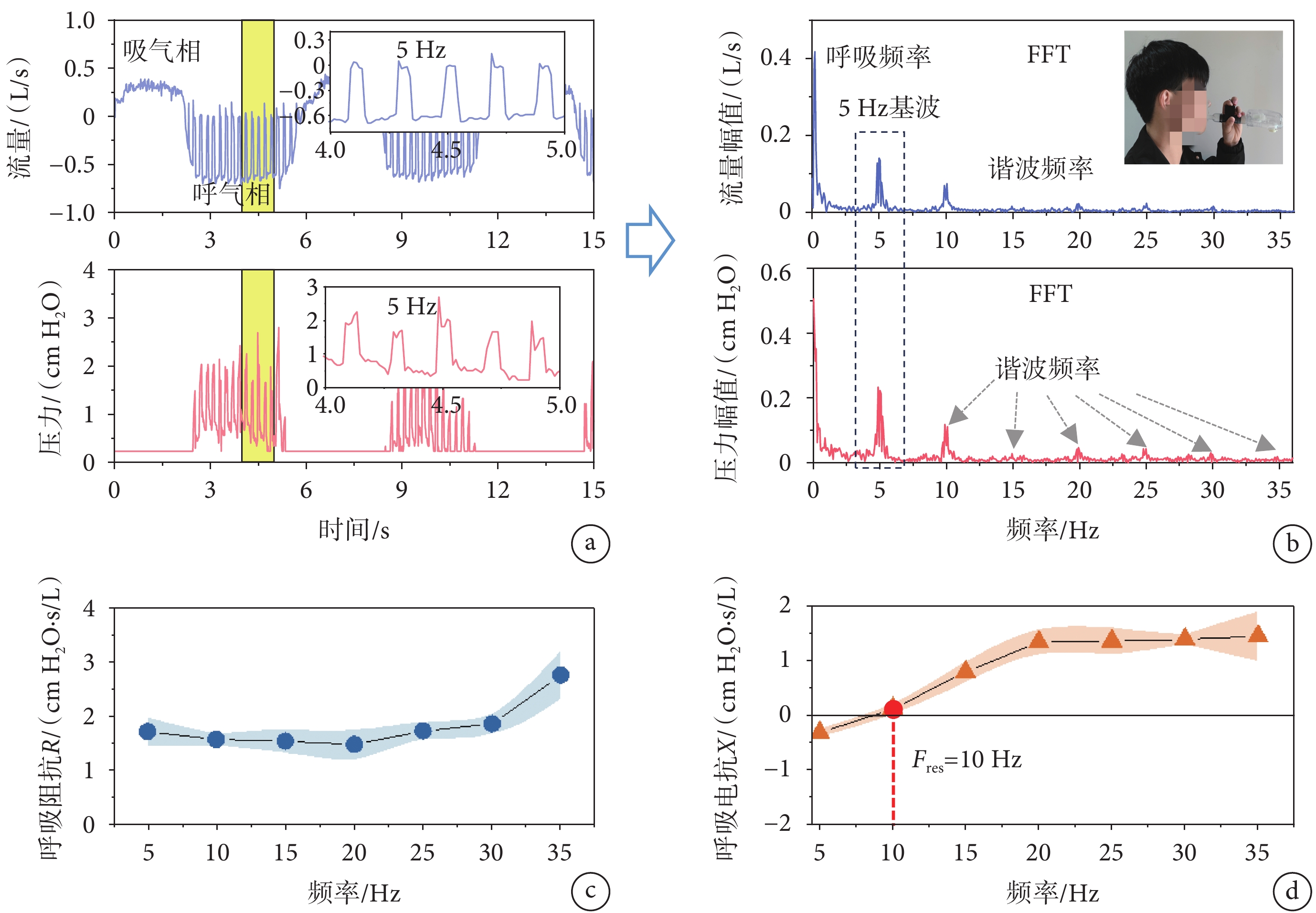
為進一步測試設備在呼氣驅動下的穩定響應,圖4展示了受試者在靜息呼吸狀態子下5 Hz激勵的氣道阻抗測量結果。圖4a為2個呼吸周期內呼氣振蕩波形及局部放大波形,局部波形結果顯示:在吸氣相時,裝置平穩進氣;在呼氣相時,在靠近口腔處可以檢測到振蕩壓力和流量波形,其平均振蕩幅值分別為0.7 L/s和1.7 cm H2O,滿足強迫振蕩肺功能檢測的要求。圖4b所示的流量和壓力頻譜曲線展示了呼吸頻率(< 2 Hz)、5 Hz激勵振蕩的基波及諧波頻率成分(如10、15、20 Hz等)。
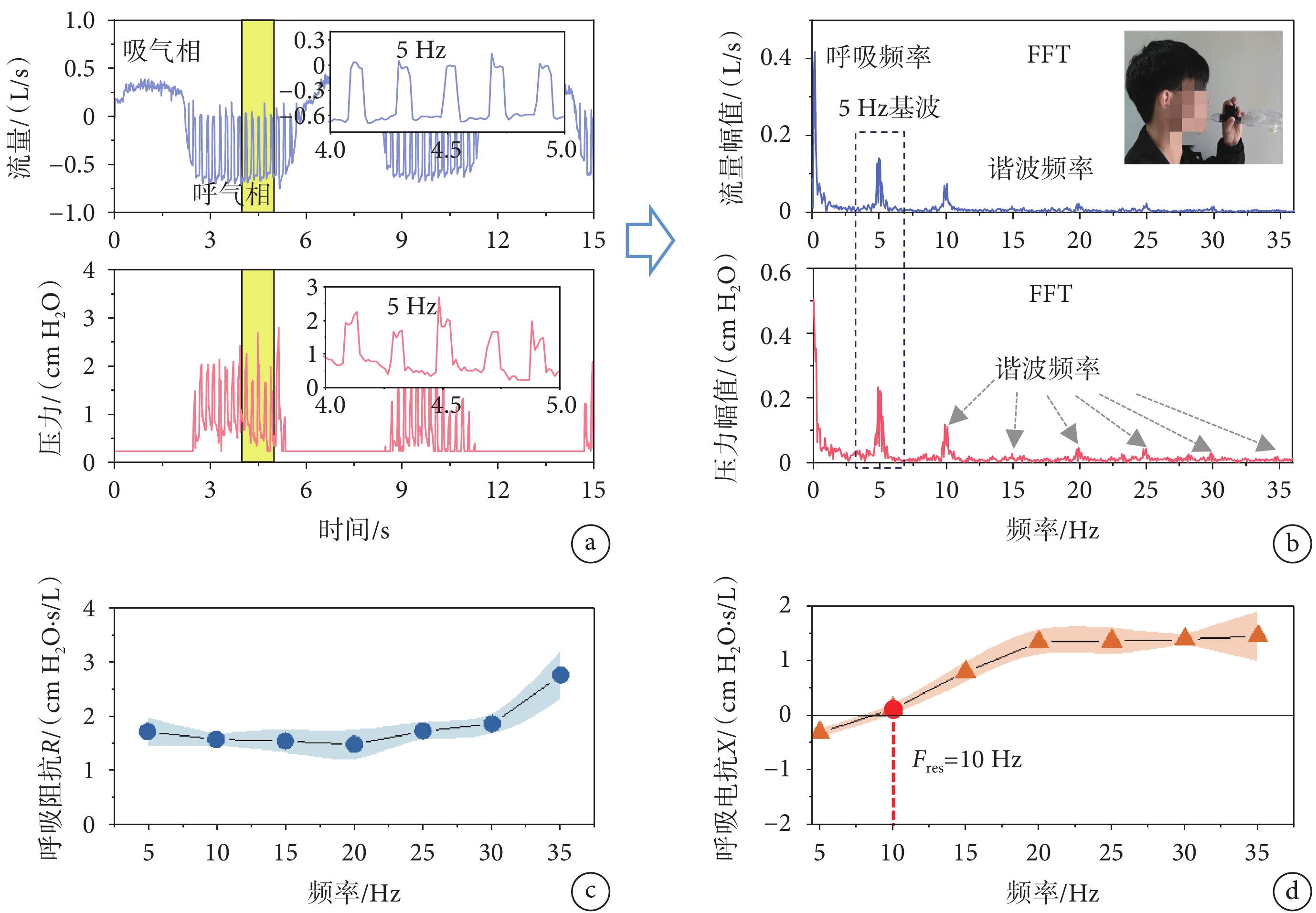 圖4
呼氣驅動振蕩的氣道阻抗測量結果
圖4
呼氣驅動振蕩的氣道阻抗測量結果
a. 靜息狀態下5 Hz振蕩的流量和壓力波形及局部波形;b. 流量和壓力振蕩波形的幅值頻譜分布;c. 呼吸阻抗
a. waveforms of flow and pressure with normal breathing at 5 Hz; b. amplitude spectra of flow and pressure; c. spectra of respiratory resistance
激勵頻率及其諧波成分可以用于多頻同步的氣道阻抗估計,圖4c和d分別為5 Hz振蕩脈沖激勵下的呼吸阻抗R和呼吸電抗X的頻譜圖。圖4c中藍色圓點為R均值,藍色條帶為5次測量的誤差帶,5 Hz激勵頻率下的呼吸阻抗R5為(1.880 ± 0.166)cm H2O·s/L,該頻譜結果反映了氣道黏性阻力在5~35 Hz范圍內隨頻率增加有略微升高的依賴性。圖4d中橙色三角為X均值,橙色條帶為5次測量的誤差帶,5 Hz激勵頻率下的呼吸阻抗X5為(–0.180 ± 0.083)cm H2O·s/L,其共振頻率Fres為10 Hz,該頻譜結果反映了氣道彈性阻力和慣性阻力具有先上升后平穩的頻率依賴性。
2.4 氣道阻抗測量結果準確性的驗證與分析
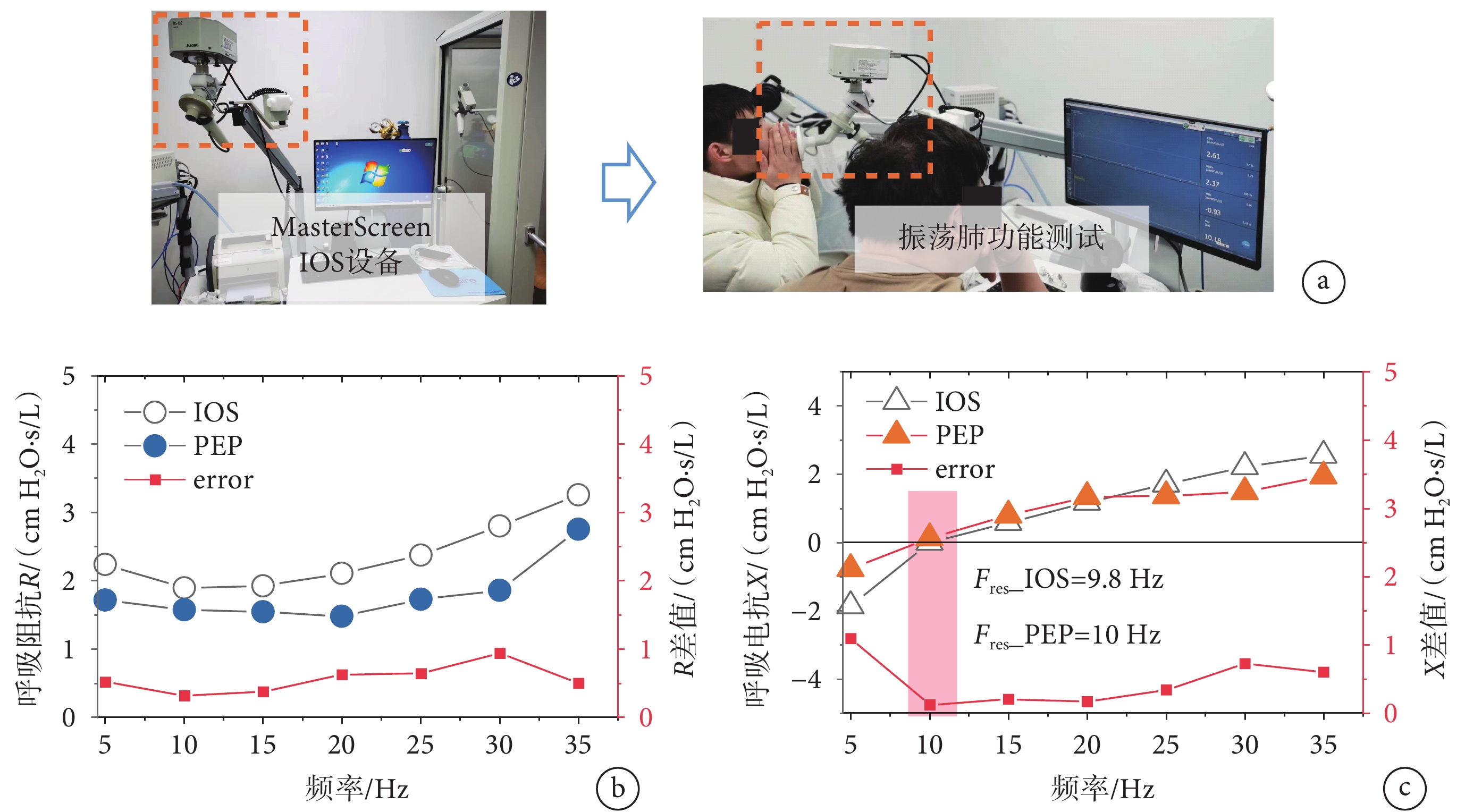
為了進一步驗證設備氣道阻抗監測的準確性,圖5測試和對比了本研究設備(呼氣正壓,positive expiratory pressure,PEP)與臨床肺功能儀(IOS)測試的呼吸系統阻抗頻譜曲線及差值。圖5a為連續頻率脈沖振蕩肺功能測量設備及其在規范測試過程中的數據采集,同一受試者將再通過本設備測試5 Hz激勵頻率下的3次呼吸阻抗數據。
 圖5
本文設備與臨床肺功能儀的測量結果比較
圖5
本文設備與臨床肺功能儀的測量結果比較
a. 臨床肺功能測量儀及測量實驗圖;b. 呼吸阻抗
a. photos of pulmonary function device and test; b. comparison of respiratory resistance
呼吸阻抗R和呼吸電抗X的頻譜曲線分別如圖5b~c所示。圖5b中本研究設備PEP(實心點)比IOS(空心點)在5~35 Hz頻譜上測得的呼吸阻抗值偏低,但兩者頻譜曲線具有較為一致的變化趨勢,其差值(方點)均小于1 cm H2O·s/L。圖5c中PEP(實心三角)與IOS(空心三角)頻譜曲線的整體變化趨勢一致,最大差值小于1.1 cm H2O·s/L,且共振頻率幾乎重合,分別為10 Hz和9.8 Hz。該結果表明本研究設備與臨床肺功能儀測得的結果具有較好的相關性,考慮到傳感器精度差異和氣道阻抗的變異性等因素,本研究的氣道阻抗測量結果在一定誤差范圍內評估氣道阻抗的準確性較好。
2.5 氣道阻抗的動態測量結果與分析
為了驗證振蕩測量系統在氣道阻抗動態監測方面的有效性,本研究測試和對比了靜息運動(爬樓梯)狀態組的呼吸系統阻抗。測試過程采用5 Hz的激勵頻率。圖6a展示了兩組的氣道流速限制信息——流量容積環圖,結果顯示:靜息狀態組的振蕩幅值和肺容積值均比運動狀態組小,平均振蕩幅值分別為0.7、1.1 L/s,平均肺容積分別為1.0、1.7 L。此外,兩組對應的時頻譜(見圖6b)幅值分布結果均包含了呼吸頻率(< 2 Hz)、5 Hz振蕩的基波及諧波頻率成分,其中運動狀態組的幅值在呼吸頻率和5 Hz附近明顯增強。
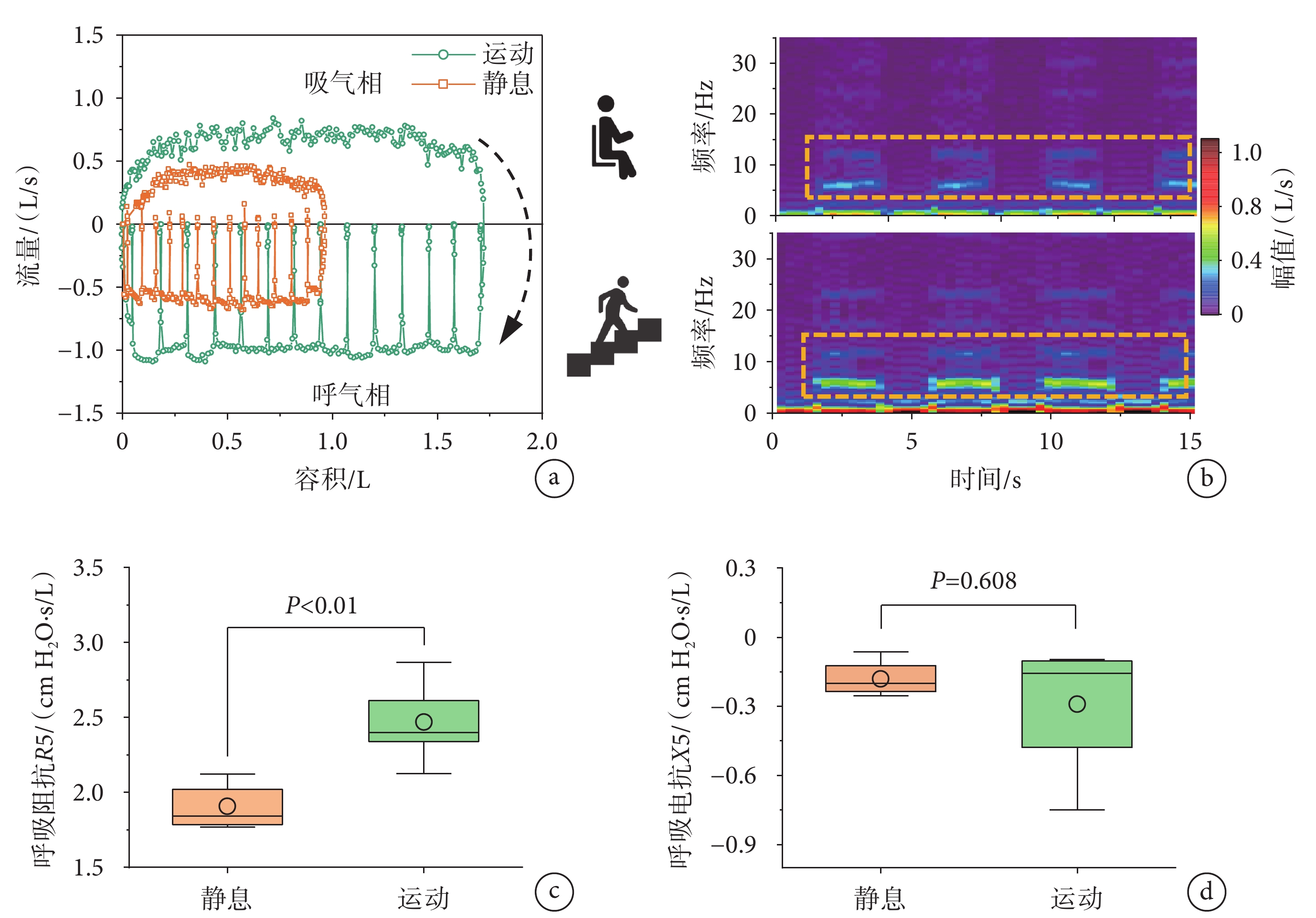 圖6
呼吸系統阻抗的動態測試結果
圖6
呼吸系統阻抗的動態測試結果
a. 靜息與運動狀態下流量容積環圖的比較;b. 兩組流量振蕩信號的幅值時頻譜圖比較;c. 呼吸阻抗
a. comparison of flow-volume curves with normal state and exercise state; b. time-frequency spectra of flow signals in the two groups; c. box plot of respiratory resistance
考慮到5 Hz激勵頻率可以覆蓋全部呼吸系統,圖6c~d統計和對比了兩組呼吸阻抗R5、呼吸電抗X5的差異。兩組統計結果的均值、標準差及95%置信區間(95% CI)如表3所示,方差分析結果表明,靜息狀態和運動狀態的R5均值分別為1.880、2.433 cm H2O·s/L,靜息狀態明顯低于運動狀態(P < 0.01)(見圖6c);靜息狀態和運動狀態的X5均值分別為–0.220、–0.301 cm H2O·s/L,兩種狀態無顯著差異(P = 0.608)(見圖6d)。
對以上實驗結果進行分析,由于在運動狀態下受試者的肺容積增大,氣道的流速受限,周邊氣道受刺激后有較大收縮變化,導致其黏性阻力增加,最終會表現為運動組R5的均值顯著升高;另一方面,盡管運動狀態下肺的平均順應性無明顯變化,但肺實質的彈性阻力會發生變異性的波動,因此表現出運動狀態的X5均值變化不顯著而波動較大。
上述結果和分析表明,本研究所設計的氣道阻抗監測設備可以反映運動狀態下呼吸系統阻抗的參數變化,可用于便攜移動以及較長時間段內連續測量氣道阻抗的變化規律,為動態監測氣道阻抗的變異性以及肺功能相關疾病的早期篩查提供技術支撐。
3 討論與小結
針對當前肺功能設備因振蕩源體積大、功耗高等問題限制了肺功能動態測量的現狀,本研究開發了一種便攜、低功耗及可視化反饋的氣道阻抗測量系統,該系統支持受試者動態、連續的呼吸力學參數監測。本系統采用了新的振蕩發生策略,即通過受試者呼氣相氣流與受控電磁氣閥的配合產生振蕩壓力輸出,該策略極大降低了驅動和供電部分的體積和功耗要求(僅17 cm × 6 cm × 7 cm,0.5 W)。此外,集成傳感和控制電路、可視化反饋軟件界面的設計,支持受試者根據實時反饋來調整呼氣狀態,減少了振蕩輸出的不穩定性和測量干擾,也一定程度上減少了測試過程中對專業醫務人員的監督輔助需求。本研究與臨床肺功能儀的呼吸系統阻抗(R和X)對照結果表明,可以在較小誤差范圍內(< 1.1 cm H2O·s/L)很好地評估氣道阻抗的頻率依賴性;靜息與運動狀態下的R5和X5統計結果驗證了本設備能夠監測和反映氣道阻力參數的動態變化。
綜上所述,本設研究開發的手持式呼氣振蕩驅動的氣道阻抗監測系統,有助于發現和協助診斷肺功能疾病早期靜息狀態下潛伏的病理生理變化,也為振蕩肺功能測量設備的低功耗、便攜化甚至可穿戴方向開發提供了一種研究思路。
重要聲明
利益沖突聲明:本文全體作者均不存在利益沖突。
作者貢獻聲明:匡英烽負責整體實驗方案設計,包括技術實現、數據采集和數據整理,以及撰寫論文初稿和修改論文;車波負責數據處理與分析和修改論文;李軒負責論文中振蕩源機械結構的設計;劉磊、鄧林紅負責指導和修改論文。
倫理聲明:本研究通過了常州大學生物醫學倫理委員會的審批(批文編號:2022022804)。
0 引言
肺部疾病是當前危害人類生命健康的高發病,開發快速、無損的肺功能檢測技術已經成為臨床即時診斷和治療的巨大需求[1-3]。傳統肺功能評估方法主要依賴于肺活量測定和肺功能試驗[4-8],但是這些方法均存在一定局限性,比如要求患者合作度高、操作繁瑣且處理時間較長,可提供的氣道信息較少等。
振蕩式氣道阻抗測量方法是一種無創、快速、協作要求低的肺功能評估方法[9]。該方法彌補了傳統肺活量測定方法無法反映氣道阻塞及分布等方面的不足,其工作原理是在自主呼吸過程中疊加一定振蕩頻率的壓力信號,通過測量反饋的壓力和流量來計算氣道阻抗變化,進而評估肺功能狀態[10-12]。其中,振蕩源作為產生激勵信號的關鍵部分,其發展經歷了從揚聲器振蕩源到直線音圈電機振蕩源、渦輪風機振蕩源的改進和優化[13-14]。相關代表研究工作有:以低音揚聲器作為振蕩源[15-17],但其裝置體積和功耗(約80 W)均較大;以精密控制的直線活塞電機作為振蕩源[18-20],其質量(約3.5 kg)和功耗(約48 W)仍舊較大;利用可控壓差變化渦輪風機組作為低頻振蕩源[21-24],其驅動功耗接近36 W,振蕩控制系統也較為復雜。
由于以上研究中振蕩源均需要額外的驅動和供電部分,使得整個測量系統體積偏大,極大地限制了設備的可移動性和動態測量范圍,僅限于在醫院肺功能室環境下使用,難以滿足家庭環境和長時間段內連續的肺功能監測和評估。近期研究報告表明,輕便的正壓呼氣振蕩排痰裝置具有在氣道阻抗測量方面的潛在可能[25]。不過,這種裝置的振蕩輸出受限于機械結構固有的振蕩頻率,也缺乏受試者的呼氣狀態反饋,因此難以提供阻抗測量所需的穩定可控的激勵頻率和幅值。
有鑒于此,本研究采用可控呼氣振蕩與可視化狀態反饋的新策略,設計了可控電磁振蕩閥、集成傳感與控制電路以及狀態反饋系統,開發了一種手持、低功耗和可長時間連續測量氣道阻抗的便攜設備,并與臨床肺功能儀參照以及呼吸系統阻抗測試結果進行對比,驗證該阻抗測量設備用于動態監測氣道阻抗變化的準確性和有效性。
1 材料與方法
1.1 呼氣驅動的振蕩源設計
本研究采用了一種新的振蕩驅動策略,設計了利用快速阻斷氣流的方法產生壓力振蕩輸出的振蕩源系統,包括低功耗電磁振蕩閥和輕量化的通氣管腔。振蕩閥由阻斷管的狹縫腔結構及嵌入的電磁振蕩器構成:電磁振蕩器采用DC 5V、1 A供電的超小型貫穿式電磁鐵,往復行程為4 mm,功耗約為5 W;阻斷腔設計為通孔啞鈴形狀,孔徑為3 mm。振蕩源外殼及通氣管腔的機械結構均采用3D建模軟件SolidWorks設計,最后通過3D打印得到聚乳酸輕量化的振蕩源結構。
1.2 集成傳感與控制系統設計
主控電路原理圖及其印刷電路板(printed circuit board,PCB)的設計均采用立創EDA軟件(LCEDA 6.5.22)。主控電路包括:主控芯片(Atmega328P-AU,8-bit)及外圍電路、傳感器接口電路和振蕩閥驅動電路(RZ7899)。此外,控制程序的編程設計和固件寫入采用Arduino IDE集成開發環境。
傳感器模塊采用集成醫用持續正壓通氣(continuous positive airway pressure,CPAP)傳感器(FS6122-200F200-5P40,Siargo,美國),可同步檢測壓力和流量信號,其響應時間為0.5 ms,流量范圍±250 SLPM,精度±2.5%,壓力范圍–5~50 cm H2O,精度±1.0%,模擬電壓輸出范圍為0.5~4.5 V。
1.3 可視化反饋系統設計
本研究引入呼氣狀態的可視化反饋系統,用于解決因呼氣強度差異導致的振蕩輸出不穩定和測量結果受干擾的問題。反饋系統的上位機界面的開發采用LabVIEW平臺(National Instruments 2021)設計完成,其工作流程如圖1所示:通過NI-VISA串口與下位機硬件建立通信(波特率115 200 bps),實時采集并顯示流量、壓力波形,再通過呼氣壓力在1個周期內的統計值進行判斷和狀態提示。根據已有文獻報道的正壓呼氣實驗[26-27],本研究設置了10~20 cm H2O·s/L范圍的閾值。當呼氣壓力統計水平分別低于10 cm H2O·s/L、介于10~20 cm H2O·s/L和高于20 cm H2O·s/L時,反饋系統分別判斷為欠壓、適壓和過壓狀態;再通過串口發送狀態提示指令到下位機,執行亮燈程序并提示受試者調整呼氣狀態。
圖1
壓力、流量監測和可視化反饋的上位機流程設計
Figure1.
Flow chart of waveform monitoring and visual feedback system
1.4 呼吸系統阻抗測量方案設計
為了驗證振蕩測量系統在氣道阻抗動態測量方面的有效性,本研究設置了靜息和運動狀態兩組呼吸系統阻抗測試,其中運動狀態組設置為爬7層樓梯3次往返運動后氣道收縮變化時的呼吸狀態。本研究的測試過程采用了5 Hz的激勵頻率,并以臨床肺功能儀(耶格MatersScreen IOS,德國)的測試結果作為參照。受試者均為實驗室志愿者,無哮喘、慢性阻塞肺病等呼吸疾病病史,其具體指標及相關信息如表1。
受試者在測試前均詳細了解了本次實驗的相關信息,簽署了知情同意書。具體測試過程參照歐洲呼吸學會(European Respiratory Society,ERS)推薦標準:① 測量過程中保持自主呼吸狀態,避免吞咽、聲門緊閉等活動給測量帶來呼吸偽影。② 每位測試對象在呼吸穩定狀態下,記錄4個呼吸周期的呼吸壓力和流量信號。③ 為減小測量過程中的阻抗短期變異性影響,每位測試對象連續測量 3 次。
1.5 呼吸系統阻抗的參數計算
呼吸系統阻抗的計算采用R-E-I三參數力學模型[28]:
|
在傅里葉變換域的計算公式為:
|
其中,, 為角頻率。 實部為呼吸阻抗 ,反映了氣道黏性阻力R;虛部為呼吸電抗 ,反映了氣道彈性阻力E和慣性阻力I的疊加效果,并且具有顯著的頻率依賴性。
呼吸共振頻率Fres是反映氣道疾病敏感的力學參數,其估計方法為:
|
1.6 信號處理與統計方法
振蕩壓力和流量信號的處理過程均在上位機軟件完成。信號的降噪處理采用了二階Buterworth低通濾波器,其截止頻率為50 Hz;5 Hz脈沖振蕩的多頻成分提取采用了梳狀濾波器,其通帶頻率為5 Hz及其諧波頻率;信號的時頻譜分析采用了快速傅里葉變換FFT算法,其窗類型為256寬度Hanning窗。此外,阻抗數據的統計分析采用了軟件OriginLab,在單因素方差分析中采用Turkey均值比較方法,檢驗水準為0.05。
2 實驗測試與結果分析
2.1 手持式呼吸阻抗監測系統及性能參數
本系統包括手持振蕩測量裝置硬件和可視化反饋軟件兩大部分。圖2展示了該手持裝置的整體設計架構,其中圖2a為裝置的結構設計及輕量化的3D打印實物拍照,裝置主要包含振蕩、控制與傳感三個功能模塊:① 呼氣驅動的振蕩模塊及可控振蕩的電磁閥器件;② 整個系統控制電路PCB和3D封裝;③ 集成流量、壓力信號采集的傳感模塊。
圖2
呼吸阻抗測量設備的整體架構
a. 設備結構設計、實拍圖及其主要模塊:振蕩模塊、控制模塊和傳感器模塊;b. 呼氣振蕩氣道阻抗測量系統的工作流程示意圖
Figure2. The overall architecture of the respiratory impedance measurement equipmenta. the structural design of the equipment, the actual picture and its main modules: oscillation module, control module and sensor module; b. schematic diagram of the workflow of the expiratory oscillation airway impedance measurement system
圖2b闡述了呼吸阻抗測量系統的工作流程。受試者在測試時,振蕩系統采用雙線程控制策略,包括信號采集以及振蕩閥開合控制兩部分。線程1實現對壓力和流量信號的連續采集、模數轉換(analog-to-digital conversion,ADC)和串口傳輸(I2C),采樣頻率設為100 Hz,傳輸波特率為115 200 bps。線程2實現對振蕩閥的開合頻率控制,通過檢測受試者呼氣相流量信號,觸發程序以設定頻率驅動電磁閥快速開合振蕩;而在吸氣相時,電磁閥保持常開的通氣狀態。最后,振蕩測量裝置通過I2C串口方式將數據傳輸到上位機軟件,在進一步信號處理后實時可視化顯示波形。
表2比較了本設備與當前研究中強迫振蕩肺功能設備的參數性能,分別對比了設備重量、體積、功耗和單次可測量時長,其中單次可測量時長綜合考慮了受試者在測量過程中的準確性和舒適性。相比于以揚聲器、音圈電機以及渦輪風機驅動為代表的研究工作,本手持裝置采用呼氣振蕩驅動的新策略,極大減小了整體設備的重量(0.115 kg)、體積(17 cm × 6 cm × 7 cm)和功耗(0.5 W)。此外,集成的控制電路和傳感系統以及可視化反饋系統的軟硬件設計,支持受試者手持和運動過程中較長時間段內的連續測量(180 s)。
2.2 持續正壓通氣的振蕩測試與數值仿真分析
通氣測試中設置5 Hz頻率驅動振蕩源,周期性閉合阻斷的時間僅5 ms,可在通氣管腔內形成周期性的瞬時壓力脈沖振蕩。持續正壓通氣設備采用呼吸機專用的微型渦輪風機提供1 L/s的恒定流量,測試結果如圖3a~b所示。其中圖3a為通氣測試裝置及實時采集的流量、壓力振蕩波形;圖3b展示了截取時間段內的振蕩波形圖,其中黃色局部放大區域顯示:振蕩測量系統穩定輸出5 Hz振蕩頻率的流量和壓力,其平均振蕩幅值分別為0.8 L/s和1.9 cm H2O。
圖3
持續正壓通氣測試與數值仿真
a. 正壓通氣測試的實驗場景及信號采集圖;b. 5 Hz激勵頻率的振蕩流量、壓力波形;c. 振蕩閥開合狀態下流速分布數值仿真切面圖;d. 壓力分布的數值仿真切面圖
Figure3. Oscillation test and numerical simulationa. photos of test and signal sampling; b. waveforms of flow and pressure with 5 Hz excitation; c. numerical simulation cut plot of flow velocity distribution with the valve off and on; d. cut plot of pressure distribution
本研究利用SolidWorks flow simulation分析了閥門開合振蕩過程中壓力和流量變化及分布情況(見圖3c~d)。仿真設定入口呼氣流量為1 L/s,仿真結果顯示:在閥門開、合過程中,狹縫口的流量、壓力最先響應,在入口處的瞬時壓力差最高可達24.42 cm H2O(見圖3d),此范圍的正壓可滿足氣道阻抗測量所需的振蕩壓力幅值要求。
2.3 呼氣振蕩驅動的氣道阻抗測量結果與分析
為進一步測試設備在呼氣驅動下的穩定響應,圖4展示了受試者在靜息呼吸狀態子下5 Hz激勵的氣道阻抗測量結果。圖4a為2個呼吸周期內呼氣振蕩波形及局部放大波形,局部波形結果顯示:在吸氣相時,裝置平穩進氣;在呼氣相時,在靠近口腔處可以檢測到振蕩壓力和流量波形,其平均振蕩幅值分別為0.7 L/s和1.7 cm H2O,滿足強迫振蕩肺功能檢測的要求。圖4b所示的流量和壓力頻譜曲線展示了呼吸頻率(< 2 Hz)、5 Hz激勵振蕩的基波及諧波頻率成分(如10、15、20 Hz等)。
圖4
呼氣驅動振蕩的氣道阻抗測量結果
a. 靜息狀態下5 Hz振蕩的流量和壓力波形及局部波形;b. 流量和壓力振蕩波形的幅值頻譜分布;c. 呼吸阻抗
a. waveforms of flow and pressure with normal breathing at 5 Hz; b. amplitude spectra of flow and pressure; c. spectra of respiratory resistance
激勵頻率及其諧波成分可以用于多頻同步的氣道阻抗估計,圖4c和d分別為5 Hz振蕩脈沖激勵下的呼吸阻抗R和呼吸電抗X的頻譜圖。圖4c中藍色圓點為R均值,藍色條帶為5次測量的誤差帶,5 Hz激勵頻率下的呼吸阻抗R5為(1.880 ± 0.166)cm H2O·s/L,該頻譜結果反映了氣道黏性阻力在5~35 Hz范圍內隨頻率增加有略微升高的依賴性。圖4d中橙色三角為X均值,橙色條帶為5次測量的誤差帶,5 Hz激勵頻率下的呼吸阻抗X5為(–0.180 ± 0.083)cm H2O·s/L,其共振頻率Fres為10 Hz,該頻譜結果反映了氣道彈性阻力和慣性阻力具有先上升后平穩的頻率依賴性。
2.4 氣道阻抗測量結果準確性的驗證與分析
為了進一步驗證設備氣道阻抗監測的準確性,圖5測試和對比了本研究設備(呼氣正壓,positive expiratory pressure,PEP)與臨床肺功能儀(IOS)測試的呼吸系統阻抗頻譜曲線及差值。圖5a為連續頻率脈沖振蕩肺功能測量設備及其在規范測試過程中的數據采集,同一受試者將再通過本設備測試5 Hz激勵頻率下的3次呼吸阻抗數據。
圖5
本文設備與臨床肺功能儀的測量結果比較
a. 臨床肺功能測量儀及測量實驗圖;b. 呼吸阻抗
a. photos of pulmonary function device and test; b. comparison of respiratory resistance
呼吸阻抗R和呼吸電抗X的頻譜曲線分別如圖5b~c所示。圖5b中本研究設備PEP(實心點)比IOS(空心點)在5~35 Hz頻譜上測得的呼吸阻抗值偏低,但兩者頻譜曲線具有較為一致的變化趨勢,其差值(方點)均小于1 cm H2O·s/L。圖5c中PEP(實心三角)與IOS(空心三角)頻譜曲線的整體變化趨勢一致,最大差值小于1.1 cm H2O·s/L,且共振頻率幾乎重合,分別為10 Hz和9.8 Hz。該結果表明本研究設備與臨床肺功能儀測得的結果具有較好的相關性,考慮到傳感器精度差異和氣道阻抗的變異性等因素,本研究的氣道阻抗測量結果在一定誤差范圍內評估氣道阻抗的準確性較好。
2.5 氣道阻抗的動態測量結果與分析
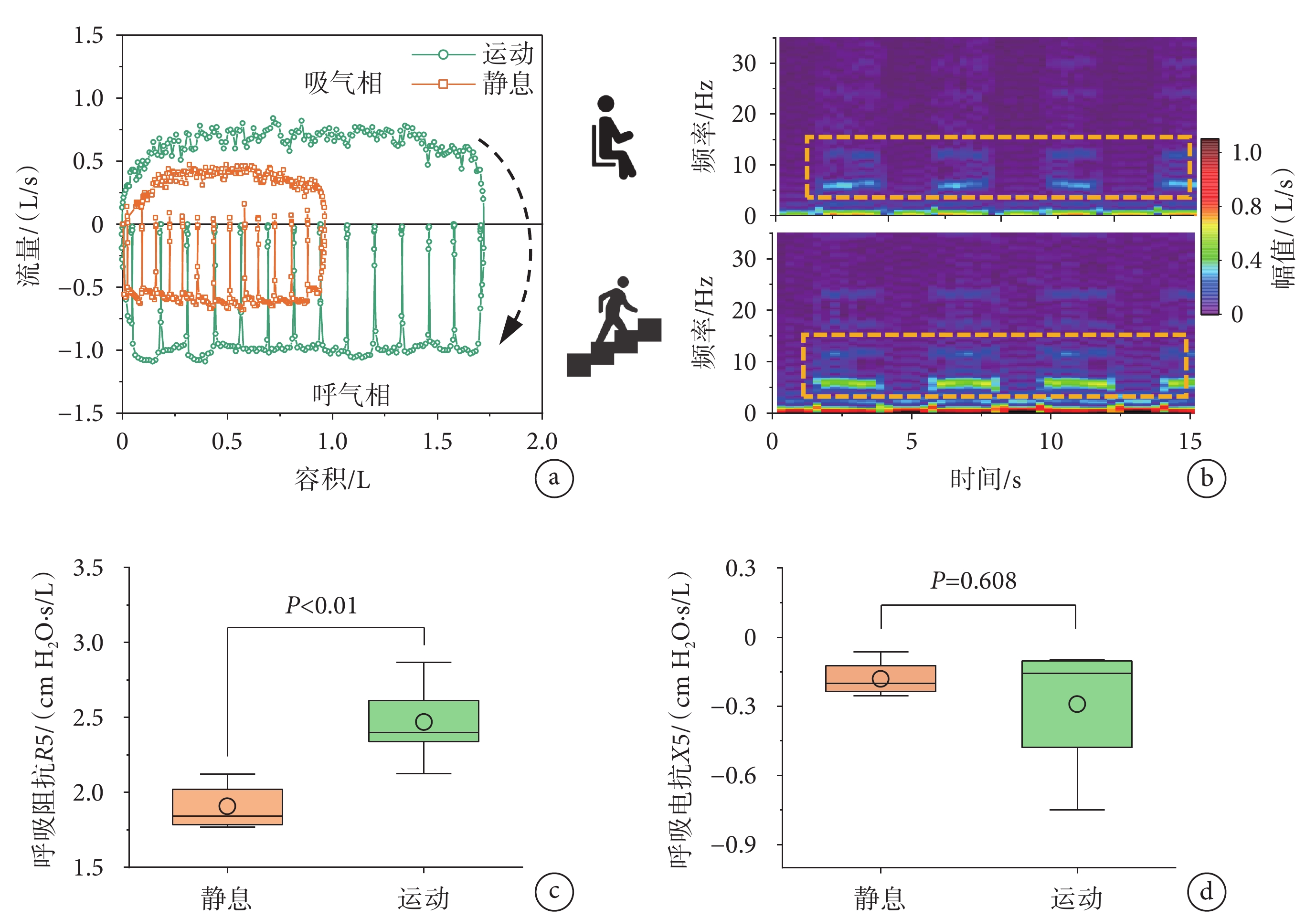
為了驗證振蕩測量系統在氣道阻抗動態監測方面的有效性,本研究測試和對比了靜息運動(爬樓梯)狀態組的呼吸系統阻抗。測試過程采用5 Hz的激勵頻率。圖6a展示了兩組的氣道流速限制信息——流量容積環圖,結果顯示:靜息狀態組的振蕩幅值和肺容積值均比運動狀態組小,平均振蕩幅值分別為0.7、1.1 L/s,平均肺容積分別為1.0、1.7 L。此外,兩組對應的時頻譜(見圖6b)幅值分布結果均包含了呼吸頻率(< 2 Hz)、5 Hz振蕩的基波及諧波頻率成分,其中運動狀態組的幅值在呼吸頻率和5 Hz附近明顯增強。
圖6
呼吸系統阻抗的動態測試結果
a. 靜息與運動狀態下流量容積環圖的比較;b. 兩組流量振蕩信號的幅值時頻譜圖比較;c. 呼吸阻抗
a. comparison of flow-volume curves with normal state and exercise state; b. time-frequency spectra of flow signals in the two groups; c. box plot of respiratory resistance
考慮到5 Hz激勵頻率可以覆蓋全部呼吸系統,圖6c~d統計和對比了兩組呼吸阻抗R5、呼吸電抗X5的差異。兩組統計結果的均值、標準差及95%置信區間(95% CI)如表3所示,方差分析結果表明,靜息狀態和運動狀態的R5均值分別為1.880、2.433 cm H2O·s/L,靜息狀態明顯低于運動狀態(P < 0.01)(見圖6c);靜息狀態和運動狀態的X5均值分別為–0.220、–0.301 cm H2O·s/L,兩種狀態無顯著差異(P = 0.608)(見圖6d)。
對以上實驗結果進行分析,由于在運動狀態下受試者的肺容積增大,氣道的流速受限,周邊氣道受刺激后有較大收縮變化,導致其黏性阻力增加,最終會表現為運動組R5的均值顯著升高;另一方面,盡管運動狀態下肺的平均順應性無明顯變化,但肺實質的彈性阻力會發生變異性的波動,因此表現出運動狀態的X5均值變化不顯著而波動較大。
上述結果和分析表明,本研究所設計的氣道阻抗監測設備可以反映運動狀態下呼吸系統阻抗的參數變化,可用于便攜移動以及較長時間段內連續測量氣道阻抗的變化規律,為動態監測氣道阻抗的變異性以及肺功能相關疾病的早期篩查提供技術支撐。
3 討論與小結
針對當前肺功能設備因振蕩源體積大、功耗高等問題限制了肺功能動態測量的現狀,本研究開發了一種便攜、低功耗及可視化反饋的氣道阻抗測量系統,該系統支持受試者動態、連續的呼吸力學參數監測。本系統采用了新的振蕩發生策略,即通過受試者呼氣相氣流與受控電磁氣閥的配合產生振蕩壓力輸出,該策略極大降低了驅動和供電部分的體積和功耗要求(僅17 cm × 6 cm × 7 cm,0.5 W)。此外,集成傳感和控制電路、可視化反饋軟件界面的設計,支持受試者根據實時反饋來調整呼氣狀態,減少了振蕩輸出的不穩定性和測量干擾,也一定程度上減少了測試過程中對專業醫務人員的監督輔助需求。本研究與臨床肺功能儀的呼吸系統阻抗(R和X)對照結果表明,可以在較小誤差范圍內(< 1.1 cm H2O·s/L)很好地評估氣道阻抗的頻率依賴性;靜息與運動狀態下的R5和X5統計結果驗證了本設備能夠監測和反映氣道阻力參數的動態變化。
綜上所述,本設研究開發的手持式呼氣振蕩驅動的氣道阻抗監測系統,有助于發現和協助診斷肺功能疾病早期靜息狀態下潛伏的病理生理變化,也為振蕩肺功能測量設備的低功耗、便攜化甚至可穿戴方向開發提供了一種研究思路。
重要聲明
利益沖突聲明:本文全體作者均不存在利益沖突。
作者貢獻聲明:匡英烽負責整體實驗方案設計,包括技術實現、數據采集和數據整理,以及撰寫論文初稿和修改論文;車波負責數據處理與分析和修改論文;李軒負責論文中振蕩源機械結構的設計;劉磊、鄧林紅負責指導和修改論文。
倫理聲明:本研究通過了常州大學生物醫學倫理委員會的審批(批文編號:2022022804)。